tarea_6
DESCRIPTION
Analisis ModalTRANSCRIPT

UNIVERSIDAD NACIONAL DE INGENIERÍA
FACULTAD DE INGENIERÍA CIVIL
DEPARTAMENTO ACADÉMICO DE ESTRUCTURAS
TAREA Nº 6
Curso :
DISEÑO SÍSMICO DE OBRAS DE INGENIERÍA CIVIL
EC – 233 G
Docente :
Dr. Víctor I. Fernández-Dávila
Estudiante:
Elvis Jony Mamani-Yana 20087502H
17 de Noviembre del 2012

2
INDICE
Pág.
1. INTRODUCCIÓN ............................................................................................................. 3
2. OBJETIVOS ...................................................................................................................... 3
3. METODOLOGÍA .............................................................................................................. 3
3.1 Consideraciones generales ........................................................................................... 3
3.1.1Ecuaciones modales para sistemas no amortiguados ................................................ 3
3.1.2 Ecuaciones modales para sistemas no amortiguados ............................................... 4
3.1.3 Análisis Modal .......................................................................................................... 5
4. Ejemplos ............................................................................................................................ 6
Ejemplo 12.2 ...................................................................................................................... 6
Ejemplo 12.3 ...................................................................................................................... 7
Ejemplo 12.4 ...................................................................................................................... 8
Ejemplo 12.5 .................................................................................................................... 10
Ejemplo 12.6 .................................................................................................................... 11
5. CONCLUSIONES ........................................................................................................... 13
6. REFERENCIAS BIBLIOGRÁFICAS ............................................................................ 13

3
1. INTRODUCCIÓN
En este informe se desarrollara el procedimiento de análisis modal para obtener la solución
de simultáneas ecuaciones de movimiento. Transformaremos las ecuaciones de
movimiento en coordenadas modales, dejando un conjunto de ecuaciones modales
desacopladas; cada ecuación modal es resuelta para determinar las contribuciones modales
a la respuesta, estas respuestas modales son combinadas para obtener la respuesta total.
2. OBJETIVOS
Leer, resumir y rehacer todos los ejemplos que se discuten en la siguiente referencia:
Chapter 12
PART B: MODAL ANALYSIS
Chopra, A.K. (1995) Dynamics of Structures, Theory and Applications to Earthquake
Engineering. Prentice-Hall, Inc.
3. METODOLOGÍA
Para el presente informe se tomaran en cuenta los siguientes aspectos:
3.1 Consideraciones generales
Para la discusión de los siguientes ejemplos consideraremos:
3.1.1Ecuaciones modales para sistemas no amortiguados
Este capítulo presenta la ecuación del movimiento para un sistema con un solo grado de
libertad, nos indica que los procedimientos en los que resolvemos las dos ecuaciones de
movimiento sujetos a una excitación armónica no son eficientes para sistemas con
múltiples grados de libertad Eq. (1).
……… ……………….………………. (1)

4
Consecuentemente es ventajosa la transformación de estas ecuaciones a coordenadas
modales, es decir expresar los desplazamientos en términos de las contribuciones modales
Eq.( 2).
……………………………(2)
Remplazando en la Eq.(1) obtenemos:
…………………. (3)
Multiplicando cada término por obtenemos:
…………………. (4)
Debido a la ortogonalidad de los modos, todos los términos excepto los de la diagonal para
cada termino en el lado izquierdo de la ¡Error! No se encuentra el origen de la
referencia. son cero obteniendo así:
…………………………. (5.1)
………………….. (5.2)
3.1.2 Ecuaciones modales para sistemas no amortiguados
Cuando existe amortiguamiento, como sucede en la mayoría de los sistemas reales, la
ecuación de movimiento está dada por:
……………………………………. (6)
Usando la misma transformación (ver ¡Error! No se encuentra el origen de la
referencia. 2) para expresar los desplazamientos en función de los modos de vibración, se
obtiene:
…………………………….. (7)
5
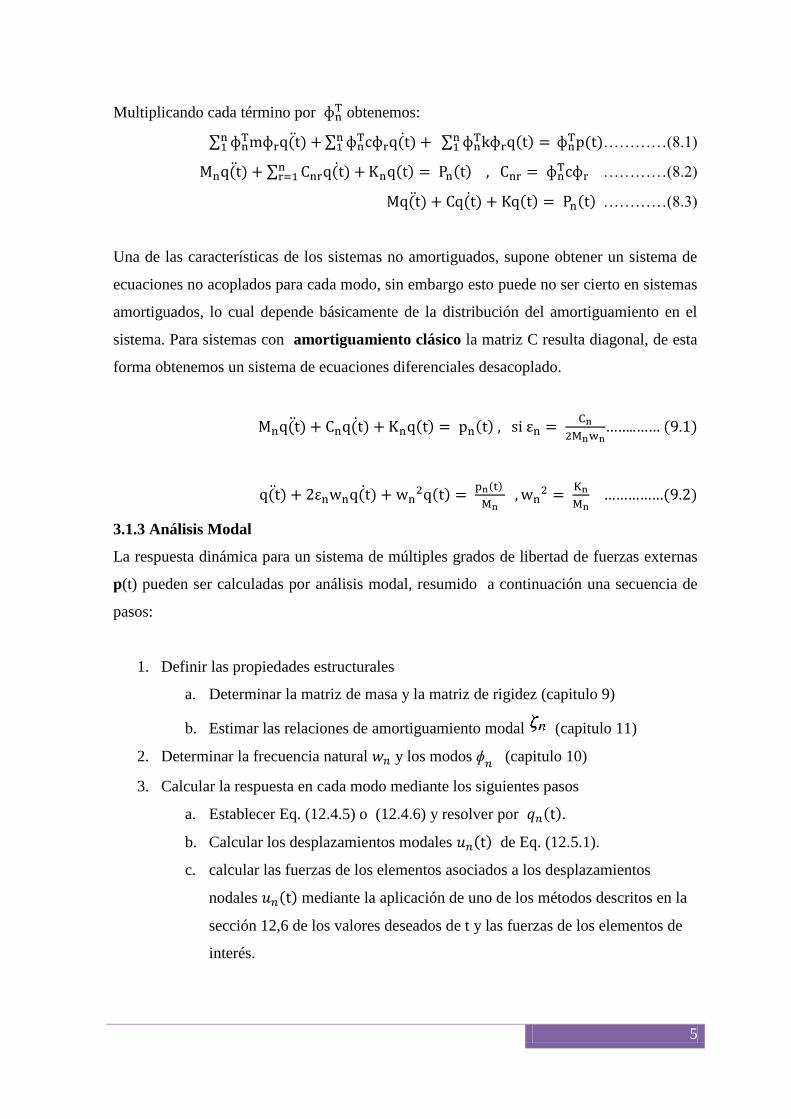
Multiplicando cada término por obtenemos:
…………(8.1)
…………(8.2)
…………(8.3)
Una de las características de los sistemas no amortiguados, supone obtener un sistema de
ecuaciones no acoplados para cada modo, sin embargo esto puede no ser cierto en sistemas
amortiguados, lo cual depende básicamente de la distribución del amortiguamiento en el
sistema. Para sistemas con amortiguamiento clásico la matriz C resulta diagonal, de esta
forma obtenemos un sistema de ecuaciones diferenciales desacoplado.
……..…… 9.1
…………… 9.
3.1.3 Análisis Modal
La respuesta dinámica para un sistema de múltiples grados de libertad de fuerzas externas
p(t) pueden ser calculadas por análisis modal, resumido a continuación una secuencia de
pasos:
1. Definir las propiedades estructurales
a. Determinar la matriz de masa y la matriz de rigidez (capitulo 9)
b. Estimar las relaciones de amortiguamiento modal (capitulo 11)
2. Determinar la frecuencia natural y los modos
(capitulo 10)
3. Calcular la respuesta en cada modo mediante los siguientes pasos
a. Establecer Eq. (12.4.5) o (12.4.6) y resolver por .
b. Calcular los desplazamientos modales de Eq. (12.5.1).
c. calcular las fuerzas de los elementos asociados a los desplazamientos
nodales mediante la aplicación de uno de los métodos descritos en la
sección 12,6 de los valores deseados de t y las fuerzas de los elementos de
interés.

6
4. Combine las contribuciones de todos los modos para determinar la respuesta total.
En particular, el desplazamiento nodal se dan por Eq. (12.5.2) y las fuerzas de los
elementos por la Eq. (12.6.1)
4. Ejemplos
Ejemplo 12.2
Considerando los sistemas y excitación del ejemplo 12.1 (ver Fig. 1) de la misma
referencia. Determine por análisis modal la respuesta del estado estacionario del sistema.
Solución:
Los modos y frecuencia naturales del sistema fueron determinados en el ejemplo 10.4 de la
misma referencia, del cual las masas y rigideces generalizadas fueron calculadas usando la
Eq. 12.4.2 de la misma referencia.
1. Calculando las fuerzas generalizadas.
2. Estableciendo las ecuaciones modales.
3. Resolviendo las ecuaciones modales.

7
Donde es dada por la Eq. (c) con como la frecuencia natural para el n-esimo modo.
Sustituyendo para y para n=1 y 2 tenemos:
4. Determinando las respuestas modales. La contribución del n-esimo modo al
desplazamiento-de la Eq. (12.3.2)-es . Sustituyendo la Eq. (d) en la Eq.
(12.3.2) de la misma referencia obtenemos las respuestas de los desplazamientos para los
dos modos:
5. Combinando las respuestas modales.
Sustituyendo en la Eq. (e) y para y tenemos:
Los resultados son equivalentes a los obtenidos en el ejemplo 12.1 de la misma referencia.
Ejemplo 12.3
Considerando los sistemas y excitación del ejemplo 12.1 de la misma referencia.
Determine la cortante de los pisos en el sistema (ver la Fig. 1), sin introducir las
fuerzas estáticas equivalentes. Considere solamente las respuestas del estado estacionario.

8
Fig. 1 Sistema de dos grados de libertad
Solución:
Los pasos 1, 2, 3 y 3a y 3b del análisis fueron completados en el Ejemplo 12.2.
Paso 3c: Las fuerza de los cortantes en los pisos del sistema (ver Fig. 1) son:
Sustituyendo la Eq. (d) del Ejemplo 12.2 en la Eq. (a) y (b) con n=1, =2k, =k, =
½ y = 1 dadas las fuerzas debido al primer modo.
Sustituyendo en la Eq. (f) del Ejemplo 12.2 en las Eq. (a) y (b) con n=2, = -1, =1
dadas las fuerzas debido al segundo modo.
Sustituyendo Eq. (c) y (d) en se tiene:
La ecuación (e) nos da las fuerzas elásticas y cortantes de piso en función del tiempo.

9
Para las variables , ω y , ya determinadas, todos los valores en el lado derecho de
estas ecuaciones son conocidas; entonces se puede calcular .
Ejemplo 12.4
Repetir el ejemplo 12.3 usando fuerzas estáticas equivalentes.
Solución:
De la ecuación (12.6.2) para un sistema de masas disociadas, la fuerza estática equivalente
en el j - esimo grado de libertad debido al n – esimo modo es:
Paso 3c: En la ecuación (a) con n=1, sustituimos m1=2m, m2=m, Ф11 = ½, Ф21 = 1, ω12
=k/2m, y q1 (t) de la Eq. (f) del ejemplo 12.2 obtenemos.
En la ecuación (a) con n=2, sustituimos =2m, =m, = -1, = 1, =2k/m, y
(t) de la Eq. (f) del ejemplo 12.2 de la misma referencia.
El análisis estático del sistema mostrado en la figura E12.4 sujeto a fuerzas dados las
2 fuerzas elásticas y cortante de piso generado por el n – esimo modo.
Sustituyendo la Eq. (b) en (d) con n=1, se tiene las fuerzas de primer modo que son
idénticas a la ecuación (c) del Ejemplo. 12.3; Similarmente sustituyendo la Eq. (c) en la
Eq. (d) con n=2 se obtienen los resultados del segundo modo que son idénticos a la Eq. (d)
del ejemplo 12.3.

10
Paso 4: Luego calculamos siguiendo el mismo procedimiento que en el ejemplo 12.3.( ver
Fig. E12.4) de la misma referencia.
Ejemplo 12.5
Nos piden considerar el amortiguamiento para determinar las amplitudes de
desplazamiento en estado estacionario.
Para resolver la ecuación que es un sistema SDF con amortiguación sometido a fuerza
armónica. La ecuación que rige es:
La solución en el estado estacionario es:
(c)
Donde:
donde:
y
Observando las ecuaciones (b) y (a) la solución de este último es:
(e)
: Frecuencia natural del enésimo modo
Razón de amortiguamiento para el enésimo modo
Remplazando por por n=1, 2 se obtiene:

11
De los pasos que se muestran en el resumen del método, se toman paso 3b y 4, ahí
sustituimos en la ecuación (13) obteniendo el desplazamiento nodal:
1
Remplazando en las ecuaciones (f) y (g) a obtenemos:
Por lo tanto finalmente loa amplitudes de desplazamiento son:
Estos se puede calcular cuando la amplitud y frecuencia w de la fuerza de excitación
se conocen en conjunto con el sistema de propiedades k, , y .
Ejemplo 12.6
Se muestra el siguiente sistema (Figura Nº1) donde se pide determinar los
desplazamientos, momentos, fuerzas cortantes en las secciones a, b, c y d como funciones
de tiempo, y también determinar para un t=0.18 seg la fuerza cortante y momento flector.
E = 29,000 ksi, I = 100 in4, L = 120 in., mL = 0.1672 kip-sec2/in, y p0 = 5 kips.

12
Fig.2
Solución:
1. Previo análisis matricial encontramos los valores de las frecuencias y los modos de
vibración:
Frecuencias: .1 1 .
Reemplazando los valores de E, I, m y L obtenemos:
1 .
1. 1
Modos de vibración: 1
.
1 1.
2. Se establece las ecuaciones modales
. kip-s²/in ;
. kip-s²/in
5 kips ;
5 kips
La ecuación modal (Ecuacion 11) es:
1
. 9 . 1. 1
. 1.1
3. Resolviendo las ecuación modal (a)
9 .
1 1 1 .9 1 1
.
. 1 1. 1 . 1 1. 1 (b)
4. Determina las fuerzas estáticas equivalentes remplazando en la (ecuación 15)
= 1
. 1 .
.
. .
De igual manera para :
11 .9
.
Se combinan las fuerzas (E12.6 e) es:
.1 11 .9
. .
5. Finalmente se van a determinar las fuerzas cortantes en las secciones a, b, c y d y
momentos flectores.

13
Donde y son conocidos de la ecuación (f) y (d).
6. Finalmente determinamos las fuerzas internas para t=0.18 seg
Reemplazando en la ecuación (b):
.9 1 1 1. 1
. 1 1. 1 . 1 9
Los resultados de las fuerzas cortantes y momentos se muestran en la Fig. 2.
5. CONCLUSIONES
1. Obtención de la respuesta total a partir de la de la combinación de las respuestas
modales.
2. La existencia de los modos permite reducir la solución de un sistema de n grados
de libertad a la solución de n sistemas independientes de 1GDL (un grado de
libertad), desacoplando de esta manera las ecuaciones de movimiento.
6. REFERENCIAS BIBLIOGRÁFICAS
1. Chopra, A.K. (1995) Dynamics of Structures, Theory and Applications to
Earthquake Engineering. Prentice-Hall, Inc.