tadeja kraner •sumenjak in vilma su•star• matematika · poglavje 1 predgovor s tem delom...
TRANSCRIPT

Tadeja Kraner Sumenjak
in
Vilma Sustar
MATEMATIKA
Maribor, 2010
2
CIP-katalozni zapis o publikacijiUniverzitetna knjiznica Maribor
CIP stevilka
AvtorNaslov publikacije/avtor, kraj, zaloznik
ISBNNaslov knjizne zbirke in ISSN stevilka
COBISS-ID
Izdajo univerzitetnega ucbenika je odobril Senat Fakultete za kmetijstvo in bio-sistemske vede Univerze v Mariboru na xx. redni seji dne xxxx.

3
Naslov: Matematika - Univerzitetni ucbenik
Avtor: Tadeja Kraner Sumenjak in Vilma Sustar
Strokovni recenzenti: izr.prof.dr Joze Nemec in doc.dr. Aleksandra Tepeh
Jezikovni recenzenti:
Tehnicni recenzenti:
Racunalniski prelom:
Oblikovanje slik:
Oblikovanje ovitka:
Tipologija/vrsta publikacije:
Zaloznik:
Kraj zalozbe:
Datum izida: [dan.mesec.leto]
Razlicica (e-pub): R [stevilka]
URL (e-pub):
Sistemske zahteve (e-pub):
Programske zahteve (e-pub):

4
Poglavje 1
Predgovor
S tem delom zeliva olajsati studentom na Fakulteti za kmetijstvo in biosistemskevede studij pri predmetu matematika. Veliko vsebin v tem ucbeniku je ponovitevsrednjesolske snovi. Razlog za to je velika razlika v predznanju iz matematikestudentov, ki se vpisejo na naso fakulteto. Izogibali sva se dokazom trditev inizrekov, ker meniva, da je cilj predmeta obvladanje matematicnih orodij v kmeti-jstvu. V ucbeniku je veliko zgledov, na koncu vsakega poglavja pa se naloge spostopki za resevanje.
V Mariboru, september 2010
Vilma in Tadeja
5
Kazalo
1 Predgovor 5
I Osnove linearne algebre 15
2 Determinante 172.1 Definicija determinante . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2 Lastnosti determinant . . . . . . . . . . . . . . . . . . . . . . . . . . 192.3 Racunanje determinant visjega reda . . . . . . . . . . . . . . . . . . . 212.4 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 24
3 Matrike 253.1 Osnovni pojmi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.1.1 Vsota matrik . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.1.2 Mnozenje matrike s skalarjem . . . . . . . . . . . . . . . . . . 263.1.3 Produkt matrik . . . . . . . . . . . . . . . . . . . . . . . . . . 273.1.4 Transponirana matrika . . . . . . . . . . . . . . . . . . . . . . 28
3.2 Kvadratne matrike . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2.1 Enotska matrika . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2.2 Zgornje trikotna in spodnje trikotna matrika . . . . . . . . . . 293.2.3 Adjungirana matrika . . . . . . . . . . . . . . . . . . . . . . . 293.2.4 Inverzna matrika . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.3 Podobnostne transformacije in rang matrike . . . . . . . . . . . . . . 303.4 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 31
4 Sistemi linearnih enacb 354.1 Osnovni pojmi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2 Postopki za resevanje sistemov linearnih enacb . . . . . . . . . . . . . 36
4.2.1 Resevanje sistema dveh linearnih enacb z dvema neznankama . 364.2.2 Resevanje sistema m linearnih enacb z n neznankami . . . . . 374.2.3 Resljivost sistema glede na rang matrike . . . . . . . . . . . . 43
6

KAZALO 7
4.3 Graficna predstavitev sistemov linearnih enacb . . . . . . . . . . . . . 474.3.1 Sistem dveh linearnih enacb z dvema neznankama . . . . . . . 474.3.2 Sistem linearnih enacb s tremi neznankami . . . . . . . . . . . 48
4.4 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 49
5 Linearno programiranje 535.1 Problem linearnega programiranja . . . . . . . . . . . . . . . . . . . . 535.2 Graficna metoda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545.3 Dualni problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.4 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 64
6 Vektorji 696.1 Osnovne definicije vektorjev . . . . . . . . . . . . . . . . . . . . . . . 696.2 Osnovne operacije z vektorji . . . . . . . . . . . . . . . . . . . . . . . 706.3 Linearna kombinacija vektorjev . . . . . . . . . . . . . . . . . . . . . 716.4 Vektorji v pravokotnem koordinatnem sistemu . . . . . . . . . . . . . 726.5 Skalarni produkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 756.6 Vektorski produkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 776.7 Mesani produkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796.8 Enacba premice v prostoru . . . . . . . . . . . . . . . . . . . . . . . . 816.9 Enacba ravnine v prostoru . . . . . . . . . . . . . . . . . . . . . . . . 826.10 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 86
II Osnove matematicne analize 91
7 Procentni racun 937.1 Procentni in sklepni racun . . . . . . . . . . . . . . . . . . . . . . . . 937.2 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 95
8 Raztopine 978.1 Mesanje raztopin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 978.2 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 99
9 Zaporedja 1039.1 Definicija in osnovne lastnosti . . . . . . . . . . . . . . . . . . . . . . 1039.2 Aritmeticno zaporedje . . . . . . . . . . . . . . . . . . . . . . . . . . 1069.3 Geometrijsko zaporedje . . . . . . . . . . . . . . . . . . . . . . . . . . 1079.4 Stekalisca in limita . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
9.4.1 ε - okolica tocke a . . . . . . . . . . . . . . . . . . . . . . . . . 1089.4.2 Stekalisce zaporedja . . . . . . . . . . . . . . . . . . . . . . . . 109

8 KAZALO
9.4.3 Limita zaporedja . . . . . . . . . . . . . . . . . . . . . . . . . 1099.5 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 111
10 Vrste 11710.1 Vrste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11710.2 Vrste s pozitivnimi cleni . . . . . . . . . . . . . . . . . . . . . . . . . 119
10.2.1 Ugotavljanje konvergentnosti vrste z majoranto . . . . . . . . 11910.2.2 D’ Alambertov kriterij . . . . . . . . . . . . . . . . . . . . . . 12010.2.3 Raabejev kriterij . . . . . . . . . . . . . . . . . . . . . . . . . 121
10.3 Absolutno in pogojno konvergentne vrste . . . . . . . . . . . . . . . . 12210.4 Alternirajoce vrste . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12210.5 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 123
11 Funkcije in njihove lastnosti 12511.1 Funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12511.2 Realne funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12511.3 Linearna funkcija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
11.3.1 Definicija in lastnosti . . . . . . . . . . . . . . . . . . . . . . . 12911.3.2 Oblike enacbe premice . . . . . . . . . . . . . . . . . . . . . . 132
11.4 Kvadratna funkcija . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13311.4.1 Definicija in lastnosti . . . . . . . . . . . . . . . . . . . . . . . 13311.4.2 Oblike zapisa kvadratne funkcije . . . . . . . . . . . . . . . . . 13511.4.3 Resevanje kvadratne neenacbe . . . . . . . . . . . . . . . . . . 136
11.5 Potencna in korenska funkcija . . . . . . . . . . . . . . . . . . . . . . 13811.5.1 Potence z racionalnimi eksponenti . . . . . . . . . . . . . . . . 13811.5.2 Koreni poljubnih stopenj . . . . . . . . . . . . . . . . . . . . . 13911.5.3 Definicija in lastnosti potencne funkcije . . . . . . . . . . . . . 14011.5.4 Definicija in lastnosti korenske funkcije . . . . . . . . . . . . . 143
11.6 Polinom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14511.6.1 Definicija in lastnosti . . . . . . . . . . . . . . . . . . . . . . . 14511.6.2 Deljenje polinomov in osnovni izrek o deljenju . . . . . . . . . 147
11.7 Racionalna funkcija . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14811.7.1 Definicija in lastnosti . . . . . . . . . . . . . . . . . . . . . . . 14811.7.2 Racionalne enacbe in neenacbe . . . . . . . . . . . . . . . . . 151
11.8 Eksponentna in logaritemska funkcija . . . . . . . . . . . . . . . . . . 15311.8.1 Definicija in lastnosti eksponentne funkcije . . . . . . . . . . . 15311.8.2 Definicija in lastnosti logaritemske funkcije . . . . . . . . . . . 15411.8.3 Stevilo e in naravni logaritem . . . . . . . . . . . . . . . . . . 15511.8.4 Primera uporabe eksponentne funkcije (eksponentna rast) . . 156
11.9 Trigonometricne funkcije . . . . . . . . . . . . . . . . . . . . . . . . . 157

KAZALO 9
11.9.1 Radian . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15711.9.2 Definicija kotnih funkcij v pravokotnem trikotniku . . . . . . . 15811.9.3 Definicija kotnih funkcij v enotski kroznici . . . . . . . . . . . 15911.9.4 Lastnosti in grafi kotnih funkcij . . . . . . . . . . . . . . . . . 15911.9.5 Zveze med kotnimi funkcijami . . . . . . . . . . . . . . . . . . 161
11.10Krozne funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16211.11Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 164
12 Odvod 16912.1 Limita in zveznost funkcije . . . . . . . . . . . . . . . . . . . . . . . . 16912.2 Definicija odvoda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17112.3 Geometricni pomen odvoda . . . . . . . . . . . . . . . . . . . . . . . 17412.4 Pravila za odvajanje . . . . . . . . . . . . . . . . . . . . . . . . . . . 17512.5 L’Hospitalovo pravilo . . . . . . . . . . . . . . . . . . . . . . . . . . . 17712.6 Ekstremi funkcij . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17812.7 Uporabne naloge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18412.8 Taylorjeva formula . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18512.9 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 186
13 Integral 19113.1 Nedoloceni integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
13.1.1 Integral vsote dveh funkcij . . . . . . . . . . . . . . . . . . . . 19213.1.2 Integral produkta funkcije s konstanto . . . . . . . . . . . . . 19213.1.3 Vpeljava nove spremenljivke ali substitucija . . . . . . . . . . 19313.1.4 Integriranje po delih (per partes) . . . . . . . . . . . . . . . . 19313.1.5 Integriranje nekaterih racionalnih funkcij . . . . . . . . . . . . 194
13.2 Doloceni integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19813.2.1 Lastnosti dolocenega integrala . . . . . . . . . . . . . . . . . . 199
13.3 Zveza med dolocenim in nedolocenim integralom . . . . . . . . . . . . 20013.4 Uporaba dolocenega integrala . . . . . . . . . . . . . . . . . . . . . . 201
13.4.1 Racunanje ploscin . . . . . . . . . . . . . . . . . . . . . . . . . 20113.4.2 Racunanje prostornine vrtenin . . . . . . . . . . . . . . . . . . 20313.4.3 Racunanje povrsine rotacijske ploskve . . . . . . . . . . . . . . 20313.4.4 Racunanje dolzine krivulje . . . . . . . . . . . . . . . . . . . . 204
13.5 Naloge s postopki za resevanje . . . . . . . . . . . . . . . . . . . . . . 204
Slike
4.1 Resljivost sistema linearnih enacb z n neznankami. . . . . . . . . . . 434.2 Premici se sekata. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.3 Premici se prekrivata. . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.4 Premici sta vzporedni. . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.1 Zgled 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.2 Slika za zgled 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 585.3 Slika za zgled 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.4 Slika za zgled 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 615.5 Slika za zgled 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 635.6 Slika za nalogo 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.7 Slika za nalogo 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.8 Slika za nalogo 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.1 Vektor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.2 Sestevanje vektorjev. . . . . . . . . . . . . . . . . . . . . . . . . . . . 706.3 Odstevanje vektorjev. . . . . . . . . . . . . . . . . . . . . . . . . . . . 716.4 Vektor v pravokotnem koordinatnem sistemu. . . . . . . . . . . . . . 736.5 Trikotnik ABC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 746.6 Skalarni produkt. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 766.7 Vektorski produkt. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 776.8 Paralelepiped, ki ga dolocajo vektorji ~a,~b in ~c. . . . . . . . . . . . . . 796.9 Enacba premice v prostoru. . . . . . . . . . . . . . . . . . . . . . . . 816.10 Oddaljenost poljubne tocke od premice. . . . . . . . . . . . . . . . . . 826.11 Enacba ravnine v prostoru. . . . . . . . . . . . . . . . . . . . . . . . . 83
9.1 Okolica tocke. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1099.2 Stekalisce zaporedja. . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
11.1 Ni graf nobene funkcije. . . . . . . . . . . . . . . . . . . . . . . . . . 12711.2 Inverzna funkcija. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12911.3 Grafi linearnih funkcij iz zgleda 71. . . . . . . . . . . . . . . . . . . . 13011.4 Konstantna funkcija. . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
10

SLIKE 11
11.5 Premica iz zgleda 72. . . . . . . . . . . . . . . . . . . . . . . . . . . . 13111.6 Vodilni koeficient je pozitiven. . . . . . . . . . . . . . . . . . . . . . . 13311.7 Vodilni koeficient je negativen. . . . . . . . . . . . . . . . . . . . . . . 13411.8 Pomen diskriminante. . . . . . . . . . . . . . . . . . . . . . . . . . . . 13511.9 Teme in zaloga vrednosti kvadratne funkcije. . . . . . . . . . . . . . . 13511.10Graf funkcije f(x) = x2 + 2x− 2. . . . . . . . . . . . . . . . . . . . . 13711.11Potencne funkcije z naravnim lihim eksponentom. . . . . . . . . . . . 14111.12Potencne funkcije z naravnim sodim eksponentom. . . . . . . . . . . . 14211.13Potencne funkcije s celim negativnim lihim eksponentom. . . . . . . . 14211.14Potencne funkcije s celim negativnim sodim eksponentom. . . . . . . 14311.15Graf korenskih funkcij z lihim korenskim eksponentom. . . . . . . . . 14411.16Graf korenskih funkcij s sodim korenskim eksponentom. . . . . . . . 14511.17Predznak polinoma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14711.18Graf polinoma p(x) = x4 − x3 − x2 + x. . . . . . . . . . . . . . . . . . 14711.19Sodi pol. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14911.20Lihi pol. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14911.21Predznaki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15111.22Graf funkcije f(x) = x2−2x−2
2x2−2. . . . . . . . . . . . . . . . . . . . . . . 151
11.23Predznak funkcije h. . . . . . . . . . . . . . . . . . . . . . . . . . . . 15211.24Grafa funkcij f(x) = 2x in g(x) =
(12
)x. . . . . . . . . . . . . . . . . 154
11.25Grafa funkcij f(x) = log2 x in g(x) = log 12x. . . . . . . . . . . . . . . 155
11.26Funkciji f(x) = ex in g(x) = ln x. . . . . . . . . . . . . . . . . . . . . 15611.27Radian. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15811.28Prvokotni trikotnik. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15811.29Enotska kroznica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15911.30Graf funkcije sinus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16011.31Graf funkcije kosinus. . . . . . . . . . . . . . . . . . . . . . . . . . . . 16011.32Graf funkcije tangens. . . . . . . . . . . . . . . . . . . . . . . . . . . 16111.33Graf funkcije kotangens. . . . . . . . . . . . . . . . . . . . . . . . . . 16211.34Graf funkcije arkus sinus . . . . . . . . . . . . . . . . . . . . . . . . . 16311.35Graf funkcije arkus kosinus. . . . . . . . . . . . . . . . . . . . . . . . 16311.36Graf funkcije arkus tangens. . . . . . . . . . . . . . . . . . . . . . . . 16411.37Slika k nalogi 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16411.38Definicijsko obmocje. . . . . . . . . . . . . . . . . . . . . . . . . . . 167
12.1 Limita funkcije. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17012.2 Primer funkcije, ki nima limite. . . . . . . . . . . . . . . . . . . . . . 17112.3 Diferencni kolicnik. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17312.4 Primer funkcije, ki ni odvedljiva. . . . . . . . . . . . . . . . . . . . . 17312.5 V limitnem postopku sekante preidejo v tangento. . . . . . . . . . . . 174

12 SLIKE
12.6 Geometrijski pomen odvoda. . . . . . . . . . . . . . . . . . . . . . . . 17512.7 Globalni in lokalni ekstremi. . . . . . . . . . . . . . . . . . . . . . . . 17912.8 Primer funkcije, ki nima ekstrema. . . . . . . . . . . . . . . . . . . . 18012.9 Predznaki prvega odvoda funkcije iz zgleda 110. . . . . . . . . . . . . 18112.10Konveksnost, konkavnost in prevoj. . . . . . . . . . . . . . . . . . . . 18212.11Graf funkcije iz zgleda 111. . . . . . . . . . . . . . . . . . . . . . . . . 18412.12Graf funkcije k nalogi 6. . . . . . . . . . . . . . . . . . . . . . . . . . 189
13.1 Riemannova vsota. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19813.2 Ploscina lika, ki je omejen z grafom pozitivne funkcije in x-osjo. . . . 20113.3 Ploscina lika, ki je omejen z grafom negativne funkcije in x-osjo. . . . 20213.4 Slika k zgledu 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20213.5 Ploscina lika, ki je omejen z grafoma dveh funkcij. . . . . . . . . . . . 20313.6 Slika k nalogi 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206

Tabele
5.1 Tabela za zgled 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.2 Tabela za zgled 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.3 Tabela za zgled 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.4 Tabela za zgled 30 (dopolnjena). . . . . . . . . . . . . . . . . . . . . . 615.5 Nacrt prevoza za zgled 30. . . . . . . . . . . . . . . . . . . . . . . . . 625.6 Cene prevozov na posameznih relacijah. . . . . . . . . . . . . . . . . . 625.7 Tabela za zgled 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.8 Cene prevozov na posameznih relacijah. . . . . . . . . . . . . . . . . . 63
11.1 Tabela za linearno funkcijo iz zgleda 72. . . . . . . . . . . . . . . . . 131
12.1 Tabeliranje funkcije f(x) = e1
x2 . . . . . . . . . . . . . . . . . . . . . . 16912.2 Pravila za odvajanje funkcij. . . . . . . . . . . . . . . . . . . . . . . . 17512.3 Tabela odvodov nekaterih elementarnih funkcij. . . . . . . . . . . . . 176
13.1 Tabela integralov elementarnih funkcij. . . . . . . . . . . . . . . . . . 192
13

14 TABELE
Del I
Osnove linearne algebre
15


Poglavje 2
Determinante
2.1 Definicija determinante
Vzemimo sistem 2 enacb z 2 neznankama:
a11x + a12y = c1
a21x + a22y = c2.
Tedaj je resitev sistema
x =c1a22 − c2a12
a11a22 − a12a21
in
y =c2a11 − c1a21
a11a22 − a12a21
.
Opazimo, da v imenovalcu za resitev x in y nastopajo le koeficienti na levi strani obehenacb. Se vec, sistem ima resitev le, ce je a11a22− a12a21 razlicen od 0. Definirajmosedaj
D =
∣∣∣∣a11 a12
a21 a22
∣∣∣∣ = a11a22 − a12a21.
Resitve sistema lahko sedaj zapisemo pregledneje:
x =c1a22 − c2a12
a11a22 − a12a21
=D1
D=
∣∣∣∣c1 a12
c2 a22
∣∣∣∣∣∣∣∣
a11 a12
a21 a22
∣∣∣∣in
y =c2a11 − c1a21
a11a22 − a12a21
=D2
D=
∣∣∣∣a11 c1
a21 c2
∣∣∣∣∣∣∣∣
a11 a12
a21 a22
∣∣∣∣,
17

18 POGLAVJE 2. DETERMINANTE
kjer je D1 =
∣∣∣∣c1 a12
c2 a22
∣∣∣∣ = c1a22 − c2a12 in D2 =
∣∣∣∣a11 c1
a21 c2
∣∣∣∣ = a11c2 − a21c1. Sheme
stevil znotraj obeh navpicnih crt imenujemo determinante reda 2. Izkaze se, dadeterminante igrajo pomembno vlogo pri resevanju sistemov linearnih enacb, karbomo podrobneje obravnavali v poglavju Sistemi linearnih enacb. Simbolicno de-terminanto reda n zapisemo na naslednji nacin:
∣∣∣∣∣∣∣∣∣
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n...
......
. . ....
an1 an2 an3 . . . ann
∣∣∣∣∣∣∣∣∣=
∑±a1k1a2k2a3k3 , . . . , ankn ,
pri cemer aij predstavlja stevilo v i-ti vrstici in j-tem stolpcu. Determinanti redan priredimo vrednost na ta nacin, da izracunamo vsoto vseh n! moznih produktovn elementov tako, da vsebuje vsak produkt natanko en element iz vsake vrstice invsakega stolpca. Predznak produkta dolocimo tako, da prestejemo vse zamenjavepo dva elementa v razporeditvi k1, k2, . . . , kn, ki so potrebne, da preuredimo torazporeditev v naravni vrstni red. Ce je potrebnih sodo stevilo razporeditev, tedajima produkt pozitiven predznak, v nasprotnem pa negativen. Determinanto lahkoizracunamo tudi tako, da jemljemo zapored elemente iz posameznih stolpcev. Tedajdobimo
D =∑
±ak11ak22ak33, . . . , aknn.
Enovrstna determinanta ima vrednost:
D = |a| = a.
Dvovrsta determinanta ima vrednost:
∣∣∣∣a11 a12
a21 a22
∣∣∣∣ = a11 · a22 − a12 · a21.
Njeno vrednost torej izracunamo tako, da od vrednosti produkta clenov na diagonaliod zgoraj navzdol proti desni odstejemo vrednost produkta clenov na diagonali odzgoraj navzdol proti levi.
Zgled 1.
∣∣∣∣2 −83 1
∣∣∣∣ = 2 · 1− (−8) · 3 = 2 + 24 = 26.
Trovrstno determinanto izracunamo takole:∣∣∣∣∣∣
a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣=

2.2. LASTNOSTI DETERMINANT 19
= a11 ·a22 ·a33 +a12 ·a23 ·a31 +a13 ·a21 ·a32−a13 ·a22 ·a31−a11 ·a23 ·a32−a12 ·a21 ·a33.
Za pomoc si lahko prva dva stolpca determinante prepisemo. Prve tri clene iz zgorn-jega obrazca sedaj predstavljajo produkti stevil na diagonalah od zgoraj navzdolproti desni, zadnje tri clene pa produkti na diagonalah od zgoraj navzdol proti levi(glej zgled 2). Determinante visjih redov pa se racunajo s pomocjo poddeterminant.
Zgled 2.
Enak rezultat dobimo, ce pripisemo namesto prvih dveh stolpcev prvi dve vrstici.
2.2 Lastnosti determinant
(1) Naj bosta D in D′ determinanti reda n. Determinanto D′ dobimo tako, da vsakovrstico determinante D zapisemo v stolpec. Potem velja, da sta njuni vrednostienaki:
D =
∣∣∣∣∣∣∣∣∣
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n...
......
. . ....
an1 an2 an3 . . . ann
∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣
a11 a21 a31 . . . an1
a12 a22 a32 . . . an2...
......
. . ....
a1n a2n a3n . . . ann
∣∣∣∣∣∣∣∣∣= D′.
Zgled 3.
D =
∣∣∣∣∣∣
2 3 −10 2 −3−8 5 −1
∣∣∣∣∣∣= −4 + 72 + 0− 0− (−30)− 16 = 82.
D′ =
∣∣∣∣∣∣
2 0 −83 2 5−1 −3 −1
∣∣∣∣∣∣= −4 + 0 + 72− 0− (−30)− 16 = 82.

20 POGLAVJE 2. DETERMINANTE
Posledica tega je, da vsaka lastnost, ki velja za vrstice, velja tudi za stolpce inobratno. Zato lahko vedno, kadar govorimo o vrsticah, mislimo tudi na stolpce.
(2) Ce v determinanti k eni vrstici (stolpcu) pristejemo poljuben veckratnikdruge vrstice (stolpca), se determinanta ne spremeni.
Zgled 4. Vzemimo determinanto D iz zgleda 3:
D =
∣∣∣∣∣∣
2 3 −10 2 −3−8 5 −1
∣∣∣∣∣∣= 82.
Pomnozimo prvo vrstico s 4 in jo pristejmo k tretji vrstici:
D =
∣∣∣∣∣∣
2 3 −10 2 −30 17 −5
∣∣∣∣∣∣= −20 + 0 + 0− 0− (−102)− 0 = 82.
(3) Ce pomnozimo vse elemente kake vrstice (stolpca) z istim faktorjem, jedobljena determinanta enaka prvotni determinanti pomnozeni s tem faktorjem. Talastnost v drugi smeri pomeni, da lahko iz vrstice (stolpca) izpostavimo skupnidelitelj.
Zgled 5.
D =
∣∣∣∣2 3−6 2
∣∣∣∣ = 2 ·∣∣∣∣
1 3−3 2
∣∣∣∣ = 2 · (2− (−9)) = 2 · 11 = 22.
(4) Ce v determinanti med seboj zamenjamo dve vrstici (stolpca), determinantaspremeni predznak. Njena absolutna vrednost pa se ohrani.
Zgled 6. Vzemimo ponovno determinanto iz zgleda 3:
D =
∣∣∣∣∣∣
2 3 −10 2 −3−8 5 −1
∣∣∣∣∣∣= 82.
Zamenjajmo prvo in drugo vrstico:∣∣∣∣∣∣
3 2 −12 0 −35 −8 −1
∣∣∣∣∣∣= 0 + (−30) + 16− (−4)− 72− 0 = −82.
(5) Determinanta z dvema enakima ali proporcialnima vrsticama (stolpcema)ali z vrstico (stolpcem) samih nicel je enaka nic.
2.3. RACUNANJE DETERMINANT VISJEGA REDA 21
Zgled 7. Determinanta z dvema enakima vrsticama:∣∣∣∣∣∣
2 1 01 2 12 1 0
∣∣∣∣∣∣= 2− 2 = 0.
Determinanta z dvema proporcionalnima vrsticama:∣∣∣∣∣∣
2 −1 36 −3 90 1 0
∣∣∣∣∣∣= 18− 18 = 0.
Determinanta z vrstico samih nicel:∣∣∣∣∣∣
2 −1 31 2 10 0 0
∣∣∣∣∣∣= 0− 0 = 0.
(6) Ce so vsi elementi na eni strani diagonale enaki 0, potem je vrednost deter-minante enaka produktu stevil na diagonali.
Zgled 8. ∣∣∣∣∣∣∣∣
2 −3 1 −20 1 −1 30 0 −3 10 0 0 1
∣∣∣∣∣∣∣∣= 2 · 1 · (−3) · 1 = −6.
2.3 Racunanje determinant visjega reda
Naj bo dana determinanta D reda n
D =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1,j−1 a1,j a1,j+1 . . . a1n
a21 a22 . . . a2,j−1 a2,j a2,j+1 . . . a2n...
.... . .
......
.... . .
...ai−1,1 ai−1,2 . . . ai−1,j−1 ai−1,j ai−1,j+1 . . . ai−1,n
ai1 ai2 . . . ai,j−1 ai,j ai,j+1 . . . ain
ai+1,1 ai+1,2 . . . ai+1,j−1 ai+1,j ai+1,j+1 . . . ai+1,n...
.... . .
......
.... . .
...an1 an2 . . . an,j−1 an,j an,j+1 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Izberimo si poljuben element aij determinante D. Iz determinante D dobimo de-terminanto reda n − 1, ce iz determinante D izbrisemo i-to vrstico in j-ti stolpec.Dobljena determinanta reda n− 1 pomnozena s faktorjem (−1)i+j je poddetermi-nanta k elementu aij . Oznacimo jo z Aij.

22 POGLAVJE 2. DETERMINANTE
Zgled 9. Zapisimo vse poddeterminante determinante D =
∣∣∣∣∣∣
2 −1 04 5 −22 2 1
∣∣∣∣∣∣.
Poddeterminante so:
A11 = (−1)1+1
∣∣∣∣5 −22 1
∣∣∣∣ = 1 · (5 · 1− (−2) · 2) = 5 + 4 = 9,
A12 = (−1)1+2
∣∣∣∣4 −22 1
∣∣∣∣ = −1 · (4 · 1− (−2) · 2) = −(4 + 4) = −8,
A13 = (−1)1+3
∣∣∣∣4 52 2
∣∣∣∣ = 1 · (4 · 2− 5 · 2) = (8− 10) = −2,
A21 = (−1)2+1
∣∣∣∣−1 02 1
∣∣∣∣ = −1 · (−1 · 1− 0 · 2) = −(−1− 0) = 1,
A22 = (−1)2+2
∣∣∣∣2 02 1
∣∣∣∣ = 1 · (2 · 1− 0 · 2) = (2− 0) = 2,
A23 = (−1)2+3
∣∣∣∣2 −12 2
∣∣∣∣ = −1 · (2 · 2− (−1) · 2) = −(4 + 2) = −6,
A31 = (−1)3+1
∣∣∣∣−1 05 −2
∣∣∣∣ = 1 · (−1 · (−2)− (0) · 5) = (2 + 0) = 2,
A32 = (−1)3+2
∣∣∣∣2 04 −2
∣∣∣∣ = −1 · (2 · (−2)− 0 · 4) = −(−4 + 0) = 4,
A33 = (−1)3+3
∣∣∣∣2 −14 5
∣∣∣∣ = 1 · (2 · 5− (−1) · 4) = (10 + 4) = 14.
Determinanto D reda n izracunamo tako, da skalarno mnozimo katero koli vrsto(stolpec) v determinanti z vrsto (stolpcem) pripadajocih poddeterminant:
D =
∣∣∣∣∣∣∣∣∣
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n...
......
. . ....
an1 an2 an3 . . . ann
∣∣∣∣∣∣∣∣∣=
= ai1Ai1 + ai2Ai2 + . . . + ainAin = a1jA1j + a2jA2j + . . . + anjAnj.
Tak nacin izracunavanja imenujemo razvoj po i-ti vrstici (j-tem stolpcu) .
Zgled 10. Razvijmo determinanto D =
∣∣∣∣∣∣
2 −1 04 5 −22 2 1
∣∣∣∣∣∣iz zgleda 9 po drugi vrstici
in po tretjem stolpcu.

2.3. RACUNANJE DETERMINANT VISJEGA REDA 23
Razvoj po drugi vrstici:
D =
∣∣∣∣∣∣
2 −1 04 5 −22 2 1
∣∣∣∣∣∣= a21A21 + a22A22 + a23A23 =
= 4 · 1 + 5 · 2 + (−2) · (−6) = 4 + 10 + 12 = 26.
Razvoj po tretjem stolpcu:
D =
∣∣∣∣∣∣
2 −1 04 5 −22 2 1
∣∣∣∣∣∣= a13A13 + a23A23 + a33A33 =
= 0 · (−2) + (−2) · (−6) + 1 · 14 = 0 + 12 + 14 = 26.
Vidimo, da se razvoj po vrstici oz. stolpcu, ki vsebuje nicle poenostavi, zato sipri racunanju vrednosti determinant vedno izberemo razvoj po stolcu oz. vrstici, kivsebuje najvecje stevilo nicel.
Zgled 11. Izracunajmo vrednost determinante D =
∣∣∣∣∣∣∣∣
2 4 0 −4−1 5 7 0−1 3 −5 60 −2 0 0
∣∣∣∣∣∣∣∣.
Vidimo, da je v cetrti vrstici najvec nicel, zato bomo determinanto D razvili pocetrti vrstici:
D =
∣∣∣∣∣∣∣∣
2 4 0 −4−1 5 7 0−1 3 −5 60 −2 0 0
∣∣∣∣∣∣∣∣= 0 · A41 + (−2) · A42 + 0 · A43 + 0 · A44.
Vsi cleni razen drugega so nic, zato je
D = (−2) · A42 = (−2)(−1)4+2 ·∣∣∣∣∣∣
2 0 −4−1 7 0−1 −5 6
∣∣∣∣∣∣=
= (−2)(·2·7·6+0·0·(−1)+(−4)·(−1)·(−5)−0·(−1)·6−2·0·(−5)−(−4)·7·(−1)) =
= (−2)(84 + 0− 20− 0− 0− 28) = (−2)(36) = −72.
Obicajno izracunamo determinanto tako, da z upostevanjem lastnosti determi-nant posamezne vrste (stolpce) mnozimo in sestevamo tako, da dobimo v eni vrsti(stolpcu) z izjemo enega elementa same nicle.

24 POGLAVJE 2. DETERMINANTE
2.4 Naloge s postopki za resevanje
1. Resimo enacbo ∣∣∣∣∣∣
x2 3 2x −1 10 1 3
∣∣∣∣∣∣= 0.
Resitev: Izracunamo determinanto:∣∣∣∣∣∣
x2 3 2x −1 10 1 3
∣∣∣∣∣∣= −3x2 + 0 + 2x− 0− x2 − 9x = −4x2 − 7x
Dobimo enacbo:−4x2 − 7x = 0.
Levo stran razstavimo:−x(4x + 7) = 0
Imamo dve resitvi:x1 = 0,
x2 = −7
4.

Poglavje 3
Matrike
3.1 Osnovni pojmi
Pravokotno shemo m × n stevil, razporejenih v m vrstic in n stolpcev, imenujemomatrika dimenzije m×n. Stevila v shemi imenujemo elementi matrike. Elementaij lezi v i-ti vrstici in j-tem stolpcu.
A =
a11 a12 . . . a1,j−1 a1,j a1,j+1 . . . a1n
a21 a22 . . . a2,j−1 a2,j a2,j+1 . . . a2n...
.... . .
......
.... . .
...ai−1,1 ai−1,2 . . . ai−1,j−1 ai−1,j ai−1,j+1 . . . ai−1,n
ai1 ai2 . . . ai,j−1 ai,j ai,j+1 . . . ain
ai+1,1 ai+1,2 . . . ai+1,j−1 ai+1,j ai+1,j+1 . . . ai+1,n...
.... . .
......
.... . .
...an1 an2 . . . an,j−1 an,j an,j+1 . . . ann
Matriko A lahko zapisemo krajse: A = [aij]; i = 1, 2, . . . ,m; j = 1, 2, . . . , n.
Zgled 12. Dana je matrika
A =
[2 −1 04 5 −2
].
Dimenzija matrike A je 2× 3. Njeni elementi so:a11 = 2, a12 = −1, a13 = 0,a21 = 4, a22 = 5, a23 = −2.
3.1.1 Vsota matrik
25

26 POGLAVJE 3. MATRIKE
Sestevamo lahko le matrike istih dimenzij. Dve matriki sestejemo tako, dasestejemo istolezne elemente:
[aij] + [bij] = [aij + bij], i = 1, 2, . . . , m; j = 1, 2, . . . , n.
Zgled 13.
2 −1 08 3 −25 −11 7
+
−1 0 6−7 −3 56 4 −7
=
1 −1 61 0 311 −7 0
.
Zgled 14.[
2 −1 08 3 −2
]−
[ −1 0 6−7 −3 5
]=
[3 −1 −615 6 3
].
3.1.2 Mnozenje matrike s skalarjem
Matriko A = [aij] pomnozimo s skalarjem λ ∈ R tako, da z njim pomnozimovsak element v matriki:
λ · [aij] = [λaij].
Zgled 15.
3 ·[
2 −1 08 3 −2
]=
[6 −3 024 9 −6
].
Lastnosti vsote in mnozenja matrike s skalarjemNaj bodo A, B in C matrike dimenzije m× n in s, t ∈ R poljubna skalarja.
1. Sestevanje je komutativno: A + B = B + A.
2. Sestevanje je asociativno: (A + B) + C = A + (B + C).
3. Obstaja nevtralni element 0 (matrika): A + 0 = A.Pri cemer je 0 matrika samih nicel in je enake dimenzije kot matrika A. Imenu-jemo jo nicelna matrika.
4. Vsaka matrika A ima nasprotno matriko −A: A + (−A) = 0.Elementi matrike −A se od matrike A razlikujejo le po predznaku.
5. Distributivnost v matricnem faktorju: t(A + B) = tA + tB.
6. Distributivnost v skalarnem faktorju: (s + t)A = sA + tA.
7. Homogenost: (st)A = s(tA).
8. Obstaja nevtralni element za mnozenje (skalar): 1 · A = A.

3.1. OSNOVNI POJMI 27
3.1.3 Produkt matrik
Dve matriki lahko pomnozimo natanko takrat, ko je stevilo stolpcev prve matrikeenako stevilu vrstic druge matrike. Naj bo torej A = [aij] matrika dimenzije m× pin B = [bij] matrika dimenzije p×n. Potem je produkt C = A ·B matrika dimenzijem× n s splosnim elementom:
cij =
p∑
k=1
aikbkj = ai1b1j + ai2b2j + ... + aipbpj.
Ce gledamo na i-to vrstico matrike A in j-ti stolpec matrike B kot na vektorja,potem je element cij matrike C = AB enak skalarnemu produktu opisanih vektorjev.Skalarni produkt vektorjev bomo podrobneje obravnavali v poglavju Vektorji.
Zgled 16. Izracunajmo produkt matrik: A =
1 2 34 5 6−3 −2 −1
in B =
3 01 1−1 4
.
Matrika A je dimenzije 3 × 3, matrika B pa 3 × 2, torej bo matrika C = ABdimenzije 3× 2. Izracunajmo vrednosti vseh elementov:
c11 = 1 · 3 + 2 · 1 + 3 · (−1) = 3 + 2− 3 = 2,c12 = 1 · 0 + 2 · 1 + 3 · 4) = 0 + 2 + 12 = 14,c21 = 4 · 3+5 · 1+6 · (−1) = 12+5− 6 = 11,c22 = 4 · 0 + 5 · 1 + 6 · 4 = 0 + 5 + 24 = 29,c31 = −3 · 3− 2 · 1 + 1 = −9− 2 + 1 = −10,c32 = −3 · 0− 2− 1 · 4 = 0− 2− 4 = −6.
Torej je
C = AB =
2 1411 29−10 −6
.
Lastnosti mnozenja matrik
1. Mnozenje matrik ni komutativno: AB 6= BA.
Zgled 17. Vzemimo matriki iz zgleda 16. Produkt BA ni samo razlicen odprodukta AB, vendar sploh ne obstaja, saj stevilo stolpcev prve matrike nienako stevilu vrstic druge matrike.
Produkt matrik ni komutativen, tudi ce obstajata oba produkta AB in BA.

28 POGLAVJE 3. MATRIKE
Zgled 18. Izracunajmo produkta AB in BA za matriki
A =
[21
]in B =
[ −3 1]
:
AB =
[ −6 2−3 1
],
BA =[ −5
].
Vidimo, da AB 6= BA.
2. Mnozenje matrik je asociativno: (AB)C = A(BC).
3.1.4 Transponirana matrika
Transponirano matriko k matriki A oznacimo AT in jo dobimo tako, da vsakovrstico iz matrike A zapisemo v stolpec matrike AT : i-ta vrstica matrike A je i- tistolpec matrike AT .
A =
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n...
......
. . ....
an1 an2 an3 . . . ann
, AT =
a11 a21 a31 . . . an1
a12 a22 a32 . . . an2...
......
. . ....
a1n a2n a3n . . . ann
.
Zgled 19. Zapisimo transponirano matriko k matriki A =
3 01 2−1 4
.
AT =
[3 1 −10 2 4
].
3.2 Kvadratne matrike
Kvadratne matrike so matrike dimenzije n × n (imajo enako stevilo vrstic instolpcev). Vsaki kvadratni matriki A lahko priredimo determinanto, ki jo oznacimodet(A) ali |A|.
3.2.1 Enotska matrika

3.2. KVADRATNE MATRIKE 29
Kvadratni matriki, ki ima na diagonali stevila 1, izven nje pa same nicle, pravimoenotska matrika ali identicna matrika. Oznacimo jo z I:
I =
1 0 0 . . . 00 1 0 . . . 00 0 1 . . . 0...
......
. . ....
0 0 0 . . . 1
.
Za vsako kvadratno matriko A velja:
AI = IA = A.
3.2.2 Zgornje trikotna in spodnje trikotna matrika
Kvadratna matrika je zgornje trikotna, ce so pod glavno diagonalo same 0:
a11 a12 a13 . . . a1n
0 a22 a23 . . . a2n
0 0 a33 . . . a3n...
......
. . ....
0 0 0 . . . ann
.
Kvadratna matrika je spodnje trikotna, ce so nad diagonalo same 0:
a11 0 0 . . . 0a21 a22 0 . . . 0a31 a32 a33 . . . 0...
......
. . ....
an1 an2 an3 . . . ann
.
3.2.3 Adjungirana matrika
Adjungirano (ali prirejeno) matriko A h kvadratni matriki A dobimo tako, dajo transponiramo, nato pa vsak element aij zamenjamo z vrednostjo pripadajocepoddeterminante Aij:
A =
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n...
......
. . ....
an1 an2 an3 . . . ann
, A =
A11 A21 A31 . . . An1
A12 A22 A32 . . . An2...
......
. . ....
A1n A2n A3n . . . Ann
.

30 POGLAVJE 3. MATRIKE
3.2.4 Inverzna matrika
Matrika A−1 je inverzna (ali obratna) k matriki A, ce velja:
AA−1 = A−1A = I.
Inverzna matrika matrike A obstaja natanko takrat, ko je det(A) 6= 0 in velja:
A−1 =1
det(A)· A.
3.3 Podobnostne transformacije in rang matrike
Denimo, da imamo matriko A in v njej naredimo eno izmed navedenih podobnostnihtransformacij (elementarnih transformacij):
• Zamenjava dveh vrstic ali stolpcev.
• Mnozenje vrstice (stolpca) s poljubnim nenicelnim stevilom.
• Vrstici (stolpcu) pristejemo drugo vrstico (stolpec) pomnozeno s poljubnimnenicelnim stevilom.
V tem primeru smo dobili matriko za katero pravimo, da je podobna prvotni ma-triki. Podobnost matrik oznacimo s simbolom ∼=. Rang matrike A dimenzijen ×m je r, ce je r × r dimenzija najvecje podmatrike matrike A, ki ima nenicelnodeterminanto, kar zapisemo
rang(A) = r.
V praksi dolocimo rang tako, da s podobnostnimi transformacijami prevedemo danomatriko na zgornje trikotno matriko. Izkaze se namrec, da se rang ne spremeni, ceizvedemo podobnostno transformacijo na matriki. Stevilo od nic razlicnih clenov, kijih lahko pri teh transformacijah namestimo na glavno diagonalo doloca rang danematrike. Rang matrike bo igral pomembno vlogo pri resevanju sistemov linearnihenacb.
Zgled 20. Dolocimo rang matrike
A =
1 −2 3 02 −1 0 4−2 −2 6 −811 −10 9 16
.

3.4. NALOGE S POSTOPKI ZA RESEVANJE 31
A ∼=
3 1 −2 00 2 −1 46 −2 −2 −89 11 −10 16
∼=
3 1 −2 00 2 −1 40 −4 2 −80 8 −4 16
∼=
3 1 −2 00 2 −1 40 0 0 00 0 0 0
Rang matrike je 2.
3.4 Naloge s postopki za resevanje
1. Izracunajmo inverzno matriko k matriki A =
2 0 3−1 1 54 0 2
.
Resitev:
det(A) =
∣∣∣∣∣∣
2 0 3−1 1 54 0 2
∣∣∣∣∣∣= 4 + 0 + 0− 0− 0− 12 = −8,
A11 = (−1)2
∣∣∣∣1 50 2
∣∣∣∣ = 2, A12 = (−1)3
∣∣∣∣−1 54 2
∣∣∣∣ = 22,
A13 = (−1)4
∣∣∣∣−1 14 0
∣∣∣∣ = −4, A21 = (−1)3
∣∣∣∣0 30 2
∣∣∣∣ = 0,
A22 = (−1)4
∣∣∣∣2 34 2
∣∣∣∣ = −8, A23 = (−1)5
∣∣∣∣2 0−1 1
∣∣∣∣ = 0,
A31 = (−1)4
∣∣∣∣0 31 5
∣∣∣∣ = −3, A32 = (−1)5
∣∣∣∣2 3−1 5
∣∣∣∣ = −13,
A33 = (−1)6
∣∣∣∣2 0−1 1
∣∣∣∣ = 2,
A =
2 0 −322 −8 −13−4 0 0
,
A−1 =
2 0 −322 −8 −13−4 0 2
,

32 POGLAVJE 3. MATRIKE
A−1 =1
det(A)· A = −1
8·
2 0 −322 −8 −13−4 0 2
=
−1
40 3
8
−118
1 138
12
0 −14
.
2. Resimo matricno enacbo AX = B, kjer je
A =
2 3 −13 2 −20 4 0
in B =
1 2 4−3 0 −11 1 1
.
Resitev: Najprej iz enacbe AX = B izrazimo matriko X. Ce bi bila A, X inB realna stevila, potem bi X izrazili tako, da bi celo enacbo delili z matrikoA. Vendar, pri matrikah ne poznamo deljenja. Zato si pomagamo z inverznomatriko. Torej celo enacbo pomnozimo z matriko A−1. Ker mnozenje matrikni komutativno, je pomembno iz katere strani mnozimo. Da dobimo na levisamo X, moramo z matriko A−1 pomnoziti iz leve:
A−1 · \ AX = BA−1 · A ·X = A−1 ·B
I ·X = A−1 ·BX = A−1 ·B
Poiscimo matriko A−1:
det(A) =
∣∣∣∣∣∣
2 3 −13 2 −20 4 0
∣∣∣∣∣∣= −12− (−16) = 4,
A11 = (−1)2
∣∣∣∣2 −24 0
∣∣∣∣ =
8,
A12 = (−1)3
∣∣∣∣3 −20 0
∣∣∣∣ = 0, A13 = (−1)4
∣∣∣∣3 20 4
∣∣∣∣ =
12,
A21 = (−1)3
∣∣∣∣3 −14 0
∣∣∣∣ =
−4,
A22 = (−1)4
∣∣∣∣2 −10 0
∣∣∣∣ = 0, A23 = (−1)5
∣∣∣∣2 30 4
∣∣∣∣ =
−8,
A31 = (−1)4
∣∣∣∣3 −12 −2
∣∣∣∣ =
−4,
A32 = (−1)5
∣∣∣∣2 −13 −2
∣∣∣∣ = 1, A33 = (−1)6
∣∣∣∣2 33 2
∣∣∣∣ =
−5,
A =
8 −4 −40 0 112 −8 −5
,

3.4. NALOGE S POSTOPKI ZA RESEVANJE 33
A−1 =1
4·
8 −4 −40 0 112 −8 −5
=
2 −1 −10 0 1
4
3 −2 −54
.
Sedaj pa se zmnozimo:
X = A−1B =
4 3 814
14
14
314
194
514
=
1
4
16 12 241 1 131 19 51
.
Rezultat lahko pustimo v tem zadnjem zapisu, saj je preglednejsi.
3. Izracunajmo det(A(B−I)), ce je A =
1 −2 03 1 −1−1 0 2
in B =
−2 0 11 2 00 −1 −2
.
Resitev: Upostevamo, da je I identicna matrika in izracunamo izraz v ok-lepaju.
B − I =
−2 0 11 2 00 −1 −2
−
1 0 00 1 00 0 1
=
−3 0 11 1 00 −1 −3
AB =
1 −2 03 1 −1−1 0 2
·
−3 0 11 1 00 −1 −3
=
−5 −2 1−8 2 63 −2 −7
Sedaj izracunamo se determinanto:
det(A(B − I)) =
∣∣∣∣∣∣
−5 −2 1−8 2 63 −2 −7
∣∣∣∣∣∣= 70− 36 + 16− 6− 60 + 112 = 96.

34 POGLAVJE 3. MATRIKE

Poglavje 4
Sistemi linearnih enacb
4.1 Osnovni pojmi
Sistem m linearnih enacb z n neznankami ima naslednjo obliko
a11x1 + a12x2 + a13x3 + . . . + a1nxn = b1
a21x1 + a22x2 + a23x3 + . . . + a2nxn = b2...
......
. . ....
...am1x1 + am2x2 + am3x3 + . . . + amnxn = bm
.
Pri tem nam aij predstavlja koeficient pred j-to neznanko v i-ti enacbi (vrstici), bi
pa desno stran i-te enacbe. Vsakemu sistemu lahko priredimo matriko sistema
A =
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n...
......
. . ....
am1 am2 am3 . . . amn
in razsirjeno matriko sistema
[A|B] =
a11 a12 a13 . . . a1n | b1
a21 a22 a23 . . . a2n | b2...
......
. . .... | ...
am1 am2 am3 . . . amn | bm
.
Oznacimo se matriki dimenzije m× 1. Matrika neznank je
X =
x1
x2...
xm
35

36 POGLAVJE 4. SISTEMI LINEARNIH ENACB
in matrika desnih strani enacb
B =
b1
b2...
bm
.
Potem lahko zgornji sistem enacb krajse zapisemo kot matricno enacbo
AX = B.
Sistem, ki ima desno stran v celoti enako 0 (bi = 0, i = 1, 2, . . . , m) imenujemohomogeni sistem, vse druge pa nehomogeni sistemi. Resitev sistema je ure-jena n-terica stevil (x1, x2, x3, . . . , xn), ki zadosca vsem enacbam sistema. Glede nastevilo resitev locimo sisteme v tri skupine.
1. Protisloven sistem je neresljiv oz. njegova mnozica resitev je prazna mnozica.
2. Enolicno resljiv ali dolocen sistem ima natanko eno resitev.
3. Nedolocen sistem ima neskoncno mnozico resitev.
4.2 Postopki za resevanje sistemov linearnih enacb
Sistema enacb sta ekvivalentna, ce imata enako mnozico resitev. Iz danega sistemadobimo ekvivalentni sistem, ce napravimo elementarne transformacije (preob-likovanja), ki so:
• Poljubni enacbi lahko zamenjamo.
• Poljubno enacbo lahko na levi in desni strani pomnozimo (ali delimo) s poljub-nim nenicelnim stevilom.
• Poljubni enacbi lahko pristejemo drugo enacbo, pomnozeno z nekim od 0 ra-zlicnim stevilom.
4.2.1 Resevanje sistema dveh linearnih enacb z dvema nez-nankama
Vzemimo sistemx + y = 02x + y = 2
.
Sistem lahko resimo na vec nacinov:

4.2. POSTOPKI ZA RESEVANJE SISTEMOV LINEARNIH ENACB 37
Zamanjava spremenljivk
Iz prve enacbe izrazimo spremenljivkox.
x = −y
Izraz −y vstavimo v drugo enacbonamesto spremenljivke x.
2(−y) + y = 2
Dobili smo linearno enacbo z eno nez-nanko, ki jo uredimo in resimo.
−y = 2
y = −2Sedaj lahko izracunamo se spre-menljivko x.
x = −(−2) = 2
Resitev sistema je R = {(2,−2)}.
Metoda nasprotnih koeficientov
x + y = 02x + y = 2
Prvo enacbo pomnozimo z (−2). −2x − 2y = 0Pri spremenljivki x smo sedaj do-bili nasprotna koeficienta.
2x + y = 2
Enacbi sestejemo. 0x - y = 2In dobimo enacbo z eno neznankoiz katere izracunamo y.
y = −2
Vrednost spremenljivke y sedajvstavimo v eno od zacetnihenacb.
x + (−2) = 0
Izracunamo x. x = 2Resitev sistema je R = {(2,−2)}.
4.2.2 Resevanje sistema m linearnih enacb z n neznankami
Cramerjevo pravilo
Matrika enolicno resljivega sistema ima determinanto D 6= 0. Take sisteme lahkoresimo s pomocjo determinant po Cramerjevem pravilu. Imejmo sistem n enacb z n

38 POGLAVJE 4. SISTEMI LINEARNIH ENACB
neznankami in naj bo A matrika sistema ter detA 6= 0:
a11x1 + a12x2 + a13x3 + . . . + a1nxn = b1
a21x1 + a22x2 + a23x3 + . . . + a2nxn = b2...
......
. . ....
...an1x1 + an2x2 + an3x3 + . . . + annxn = bn
.
Potem je sistem dolocen, n-terico resitev pa za vsak i = 1, 2, . . . , n izracunamo
xi =detAi
detA,
kjer je Ai matrika, v kateri i-ti stolpec zamenjamo s stolpcem na desni strani enacbe:
Ai =
a11 a12 . . . a1,i−1 b1 a1,i+1 . . . a1n
a21 a22 . . . a2,i−1 b2 a2,i+1 . . . a2n...
.... . .
......
.... . .
...an1 an2 . . . an,i−1 bn an,i+1 . . . ann
.
Zgled 21. Resimo sistem enacb
2x + 3y − z = 0x + y + z = 2−3x + y − z = −8
s Cramerjevo metodo.Zapisimo matriko sistema A in stolpec B:
A =
2 3 −11 1 1−3 1 −1
, B =
02−8
.
Izracunajmo potrebne determinante. Najprej
detA =
∣∣∣∣∣∣
2 3 −11 1 1−3 1 −1
∣∣∣∣∣∣= −2 + (−9) + (−1)− (−3)− 2− 3 = −14.
Determinanto detA1 dobimo tako, da v determinanti sistema detA prvi stolpec za-menjamo s stolpcem B:

4.2. POSTOPKI ZA RESEVANJE SISTEMOV LINEARNIH ENACB 39
detA1 =
∣∣∣∣∣∣
0 3 −12 1 1−8 1 −1
∣∣∣∣∣∣= 0+(−24)+(−2)− (−6)−0−8 = −28. Na enak nacin
dobimo:
detA2 =
∣∣∣∣∣∣
2 0 −11 2 1−3 −8 −1
∣∣∣∣∣∣= −4 + 0 + 8− 0− (−16)− 6 = 14,
detA3 =
∣∣∣∣∣∣
2 3 01 1 2−3 1 −8
∣∣∣∣∣∣= −16 + (−18) + 0− (−24)− 4− 0 = −14.
Nazadnje izracunamo neznanke:
x = detA1
detA= −28
−14= 2, y = detA2
detA= 14
−14= −1,z = detA3
detA= −14
−14= 1.
S Cramerjevo metodo so torej resljivi le sistemi, ki imajo determinanto matrikesistema razlicno od 0 in to so le enolicno doloceni sistemi. Nedoloceni sistemi (zneskoncnim stevilom resitev) imajo determinanto matrike sistema enako 0, zato jihs tem postopkom ne moremo resiti.
Gaussova eliminacijska metoda
Podobno, kot se resuje sistem dveh linearnih enacb z dvema neznankama zmetodo nasprotnih koeficentov, se da resevati tudi sistem m enacb z n neznankami.Ob tem ni potrebno, da je stevilo enacb enako stevilu neznank. Za zacetek si najprejoglejmo sistem enacb:
x + y = 2x − y = 03x + y = 2
.
Tak sistem je neresljiv, saj prvima dvema enacbama odgovarja resitev x = y =1, vendar ta resitev ne ustreza tretji enacbi. Zato zgornji sistem nima resitev.Nasprotno pa ima sistem
x + y + z = 6x − 2y + z = 02x − y + 2z = 6

40 POGLAVJE 4. SISTEMI LINEARNIH ENACB
neskoncno resitev. Da je temu tako ugotovimo, ce sestejemo prvo in drugo enacbo.Vsota obeh enacb je tretja enacba. Zato je tretja enacba odvec in dobimo resitev zupostevanjem samo prvih dveh enacb:
x + y = 6 − zx − 2y = −z
.
Oglejmo si tri posebne resitve tega sistema:
z = 0, x = 4, y = 2z = 3, x = 1, y = 2
z = −2, x = 6, y = 2
Vzemimo sedaj sistem m enacb z n neznankami:
a11x1 + a12x2 + a13x3 + . . . + a1nxn = d1
a21x1 + a22x2 + a23x3 + . . . + a2nxn = d2...
......
. . ....
...am1x1 + am2x2 + am3x3 + . . . + amnxn = dm
.
Zapisimo razsirjeno matriko sistema
a11 a12 a13 . . . a1n | d1
a21 a22 a23 . . . a2n | d2...
......
. . .... | ...
am1 am2 am3 . . . amn | dm
.
Z elementarnimi transformacijami (nad vrsticami) razsirjeno matriko sistema prevedemov zgornje trikotno matriko:
b11 b12 b13 . . . b1n | c1
0 b22 b23 . . . b2n | c2
0 0 b33 . . . b3n | c3...
......
. . .... | ...
0 0 0 . . . bkn | ck...
......
. . .... | ...
0 0 0 . . . bmn | cm
.
Postopek imenujemo Gaussova eliminacijska metoda. Oglejmo si natancnejeomenjeno metodo na naslednjem primeru.

4.2. POSTOPKI ZA RESEVANJE SISTEMOV LINEARNIH ENACB 41
Zgled 22. Resimo sistem enacb z Gaussovo eliminacijo
2x − 3y + 3z + w = 1x + 2z + w = 16x − y + 2z − 3w = −1−2x + 2y + z + w = 2
.
Zapisimo razsirjeno matriko sistema
2 −3 3 1 | 11 0 2 1 | 161 −1 2 −3 | −1−2 2 1 1 | 2
.
Z elementarnimi transformacijami jo zelimo preoblikovati v zgornjetrikotno matriko.Najprej zamenjamo 1. in 3. vrstico, in si na ta nacin na vrhu prvega stolpca prido-bimo element 1, kar nam nekoliko olajsa racunanje, ni pa nujno potrebno:
1 −1 2 −3 | −11 0 2 1 | 162 −3 3 1 | 1−2 2 1 1 | 2
.
Prvo vrstica je ze taksna kot v zgornje trikotni matriki, zato jo vse do konca ohran-imo. Pod prvim elementom v prvem stolpcu so v zgornje trikotni matriki same 0 into zelimo v prvem koraku dobiti. Po vrsti izvedemo naslednje transformacije:
• Prvo vrstico pomnozimo z (−1) in jo pristejemo k drugi.
• Prvo vrstico pomnozimo z (−2) in jo pristejemo k tretji.
• Prvo vrstico pomnozimo z (2) in jo pristejemo k cetrti.
Paziti moramo, da transformacije izvedemo na celotni razsirjeni matriki. Dobimo
1 −1 2 −3 | −10 1 0 4 | 170 −1 −1 7 | 30 0 5 −5 | 0
.
Druga vrstica je sedaj tudi taksna kot v zgornje trikotni matriki, zato jo ohranimovse do konca. V drugi vrstici imamo na drugem mestu sedaj element 1. Ce bi imeliv drugi vrstici na drugem mestu element 0, bi zamenjali drugo vrstico s katero od

42 POGLAVJE 4. SISTEMI LINEARNIH ENACB
spodnjih vrstic. Pod tem elementom zelimo sedaj dobiti same 0. Edini element, kise ni 0 je (−1) v tretji vrstici, zato drugo vrstico pristejemo k tretji
1 −1 2 −3 | −10 1 0 4 | 170 0 −1 11 | 200 0 5 −5 | 0
.
Tudi s tretjo vrstico smo sedaj zadovoljni, zato jo v nadaljevanju ohranimo. Edinielement, pod diagonalo, ki se ni 0, je element v zadnji vrstici in tretjem stolpcu.Zato tretjo vrstico pomnozimo z (−5) in jo pristejemo k cetrti
1 −1 2 −3 | −10 1 0 4 | 170 0 1 9 | 200 0 0 50 | 100
.
Ce iz matrike zapisemo sistem enacb, dobimo trikotni sistem, ki je ekvivalentenprvotnemu
x − y + 2z − 3w = −1y + 4w = 17
z + 9w = 2050w = 100
.
Iz zadnje vrstice izracunamo w: w = 10050
= 50 ⇒ w = 2.Iz tretje vrstice izrazimo neznanko z in vstavimo izracunano vrednost w:
z = 20− 9w = 20− 9 · 2 = 2 ⇒ z = 2.
Iz druge vrstice izrazimo neznanko y in vstavimo izracunano vrednost w:
y = 17− 4w = 17− 4 · 2 = 9 ⇒ y = 9.
Iz prve vrstice izrazimo neznanko x in vstavimo izracunane vrednosti ostalih nez-nank:
x = −1 + y − 2z + 3w = −1 + 9− 2 · 2 + 3 · 2 = 10 ⇒ x = 10.
Resitev je 4-terica: (10, 9, 2, 2), torej je sistem enolicno resljiv.
S tem postopkom lahko resimo tudi nedolocene in protislovne sisteme.

4.2. POSTOPKI ZA RESEVANJE SISTEMOV LINEARNIH ENACB 43
4.2.3 Resljivost sistema glede na rang matrike
Ce je A matrika sistema in A′ zgornje trikotna matrika ekvivalentnega sistema(dobljena z Gaussovo eliminacijsko metodo), potem sta ranga matrik A in A′ enakain izkaze se, da sta enaka stevilu nenicelnih vrstic matrike A′.
V diagramu (glej slika 4.1) je predstavljena resljivost sistemov linearnih enacbglede na rang matrike sistema.
( ) ( | )rang A rang A b<sistem je protisloven
( ) ( | )rang A rang A b=sistem je rešljiv
( )ra n g A n=
določen sistem
(ena sama re )šitev
nedoločen sistem(parametrična družinarešitev)
( )rang A n<
vedno rešljiv
( )rang A n=trivialna rešitev:
(0,0,...,0)
( )rang A n<parametričnadružina rešitev
NEHOMOGENI SISTEMI HOMOGENI SISTEMI
Slika 4.1: Resljivost sistema linearnih enacb z n neznankami.
Za vsako od navedenih moznosti bomo naredili po en zgled.
(1) Nehomogeni sistemia) rang(A) = rang(A|B) in rang(A) = n Glej zgled 22.
b) rang(A) = rang(A|B) in rang(A) < n
Zgled 23. Resimo nehomogeni sistem enacb s tremi neznankami
2x − 3y + z = 23x − 5y + 5z = 35x − 8y + 6z = 5
.
Zapisimo razsirjeno matriko sistema in jo preoblikujmo z Gaussovo eliminacijskometodo na zgornje trikotno matriko.
Prvi korak.Prvo vrstico ohranimo.Da bi pridobili 0 na zacetku druge vrstice, drugo vrstico pomnozimo z (−2) in jipristejemo prvo vrstico pomnozeno s (3).Da bi pridobili 0 na zacetku tretje vrstice, tretjo vrstico pomnozimo z (−2) in ji

44 POGLAVJE 4. SISTEMI LINEARNIH ENACB
pristejemo prvo vrstico pomnozeno s (5).
Drugi korak.Prvo in drugo vrstico ohranimo.Tretji vrstici pristejemo drugo pomnozeno z (−1):
2 −3 1 | 23 −5 5 | 35 −8 6 | 5
≈
2 −3 1 | 20 1 −7 | 00 1 −7 | 0
≈
2 −3 1 | 20 1 −7 | 00 0 0 | 0
.
Vidimo da je rang(A) = rang(A|B) = 2, saj je v preoblikovani zgornje trikotnimatriki stevilo nenicelnih vrstic enako 2. Stevilo neznank pa je 3. Ker je rang(A) =2 < 3(stevilo neznank), bomo imeli neskoncno resitev (slika 4.1). Poiscimo jih.
Zapisimo sistem enacb iz zgornje trikotne matrike
2x − 3y + z = 2y − 7z = 0
0 · z = 0.
Zadnje enacbe sploh ne bi bilo potrebno pisati, vendar jo sedaj zaradi boljsega razumevanjapisimo. Vprasajmo se, katera stevila resijo zadnjo enacbo. Vidimo, da za spre-menljivko z lahko vzamemo katerokoli realno stevilo. Zato je
z ∈ R.
Iz druge enacbe izrazimo y:y = 7z.
Iz prve enacbe izrazimo x in namesto y pisemo sedaj 7z:
2x = 20z + 2,
x = 10z + 1.
Neznanki x in y sta odvisni od z. Za vsako realno stevilo z bomo dobili neko trojicoresitev, ki je oblike:
{(10z + 1, 7z, z)|z ∈ R}.Mnozico resitev imenujemo 1-parametricna mnozica resitev, ker se izraza
s parameterom z. Lahko bi bilo parametrov tudi vec. Stevilo parametrov jerazlika med stevilom neznank in rangom matrike sistema. V nasem primeru jen− rang(A) = 3− 2 = 1.

4.2. POSTOPKI ZA RESEVANJE SISTEMOV LINEARNIH ENACB 45
c) rang(A) < rang(A|B)
Zgled 24. Resimo sistem enacb
x + y + z = 03x + 3y − 2z = 12x + 2y − 3z = 2
.
Zapisimo matriko sistema in jo z Gaussovo eliminacijo preoblikujmo v zgornjetrikotno matriko
1 1 1 | 03 3 −2 | 12 2 −3 | 2
≈
1 1 1 | 00 0 −5 | 10 0 −5 | 2
≈
1 1 1 | 00 0 −5 | 10 0 0 | 1
.
Vidimo, da je
rang(A) = 2 in rang(A|B) = 3.
Sledi, da je
rang(A) > rang(A|B),
torej je sistem protisloven (slika 4.1). Izpisimo si zadnjo enacbo iz zgornje trikotnematrike
0 · x + 0 · y + 0 · z = 1.
Torej je
0 = 1,
kar pa ni nikoli res, ne glede na to, katere x, y ali z bi si izbrali. Zato sistem niresljiv.
(2) Homogeni sistemi z n neznankami
a) Rang(A) = n
Zgled 25. Resimo homogeni sistem
x − y + z = 02x + y − z = 0−x + 3y − 2z = 0
.
Zapisimo matriko sistema in jo z elementarnimi transformacijami preoblikujmov zgornje trikotno matriko. Pri homogenih sistemih nikoli ne pisemo razsirjene

46 POGLAVJE 4. SISTEMI LINEARNIH ENACB
matrike sistema, saj vemo, da bo desna stran ne glede na transformacije vednoenaka 0. Dobimo
1 −1 12 1 −1−1 3 −2
≈
1 −1 10 3 −30 2 −1
≈
1 −1 10 3 −30 0 3
.
Vidimo, da jerang(A) = 3,
kar je enako stevilu neznank. Zato bomo imeli le trivialno resitev (slika 4.1). Izzgornje trikotne matrike izpisimo sistem enacb:
x − y + z = 03y − 3z = 0
3z = 0.
Iz zadnje vrstice sledi, da je z = 0. Iz druge potem sledi, da je y = 0 in iz prve, daje x = 0. Res dobimo samo trivialno resitev R = {(0, 0, 0)}.
b) Rang(A) < n
Zgled 26. Resimo homogeni sistem enacb
−x1 − x2 + x3 + x4 = 0x1 + 3x2 + 3x3 + x4 = 02x1 −2x3 − x4 = 0x1 + 3x2 + 9x3 + 5x4 = 0
.
Zapisimo matriko sistema in jo preoblikujmo
−1 −1 1 11 3 3 12 0 −2 −11 3 9 5
≈
−1 −1 1 10 2 4 20 −2 0 10 4 8 4
≈
−1 −1 1 10 2 4 20 0 4 30 0 0 0
.
V preoblikovani zgornje trikotni matriki imamo 3 nenicelne vrstice, torej je
rang(A) = 3,
kar je manj od stevila neznank 4. Torej bomo imeli neskoncno resitev (slika 4.1).Poiscimo jih. Zapisimo sistem enacb iz zgornje trikotne matrike
−x1 − x2 + x3 + x4 = 02x2 + 4x3 + 2x4 = 0
4x3 + 3x4 = 00 · x4 = 0
.

4.3. GRAFICNA PREDSTAVITEV SISTEMOV LINEARNIH ENACB 47
Zadnjo enacbo resi katerikoli x4 ∈ R. Druge neznanke se bodo izrazale z x4, torej jex4 parameter.Iz tretje enacbe sledi:
x3 = −3
4x4.
Iz druge enacbe sledi:
x2 = −2x3 − x4 = −2 · (−3
4x4)− x4 =
3
2x4 − x4 =
1
2x4.
Iz prve enacbe sledi:
x1 = −x2 + x3 + x4 = −1
2x4 + (−3
4)x4 + x4 = −1
4x4.
Mnozica resitev sistema je:
R = {(−1
4x4,
1
2x4,−3
4x4, x4)|x4 ∈ R}.
4.3 Graficna predstavitev sistemov linearnih enacb
4.3.1 Sistem dveh linearnih enacb z dvema neznankama
Tocke, ki zadoscajo linearni enacbi z dvema neznankama, lezijo na premici vravnini. Resevanje sistema dveh enacb z dvema neznanakama predstavlja ugotavl-janje medsebojne lege dveh premic. Resitev sistema pa so tocke, ki lezijo na obehpremicah hkrati. Obstajajo tri mozne medsebojne lege dveh premic, in zato tuditrije mozni izzidi pri resevanju sistema.
1. Dolocen sistem:x + y = 02x + y = 2
.
Premici se sekata - imata eno skupno tocko (2,−2) in to je tudi edina resitevsistema (slika 4.2).
2. Nedolocen sistem:4x + 2y = 42x + y = 2
.
Premici se prekrivata - imata neskoncno skupnih tock, zato ima sistem neskoncnoresitev. Resitev je cela premica oz. tocke oblike (x, 2 − 2x), kjer je x ∈ R.

48 POGLAVJE 4. SISTEMI LINEARNIH ENACB
y x= -
2 2y x= - +
(2, 2)-2.50-2.5-5
10
5
0
-5
x
y
x
y
x
y
Slika 4.2: Premici se sekata.
52.50-2.5
10
5
0
-5
x
y4 4
2
xy
-=
2 2y x= -
Slika 4.3: Premici se prekrivata.
Imamo 1-parametricna resitev, saj za vsako vrednost parametra x dobimotocno doloceno resitev sistema (slika 4.3).
3. Protisloven sistem:2x + y = 42x + y = 2
.
Premici sta vzporedni, torej nimata nobene skupne tocke, zato sistem nimaresitve (slika 4.4).
4.3.2 Sistem linearnih enacb s tremi neznankami
Tocke, ki zadoscajo linearni enacbi s tremi neznankami predstavljajo ravnino v

4.4. NALOGE S POSTOPKI ZA RESEVANJE 49
52.50-2.5-5
10
5
0
-5
x
y4 2y x= -
2 2y x= -
Slika 4.4: Premici sta vzporedni.
prostoru. Resevanje sistema dveh enacb s tremi neznankami predstavlja ugotavljanjemedsebojne lege dveh ravnin. Resitev sistema, pa so tocke, ki lezijo na obeh ravninahhkrati. Spet obstajajo tri mozne medsebojne lege.
1. Ravnini se sekata. Presecisce dveh ravnin je premica. Resitev sistema so vsetocke na premici (nedolocen sistem).
2. Ravnini sta vzporedni. Nimata nobene skupne tocke. Sistem nima resitve(protisloven sistem).
3. Ravnini se prekrivata. Vse tocke so skupne. Resitev so vse tocke na ravnini(nedolocen sistem).
Vidimo, da sistem z dvema enacbama in tremi neznankami ni nikoli dolocen. Vednodobimo neskoncno resitev ali pa nobene. Kadarkoli imamo v sistemu vecje steviloneznank kot enacb, sistem ni enolicno dolocen. Resevanje sistema treh enacb s tremineznankami predstavlja ugotavljanje medsebojne lege treh ravnin. Resitev sistemapa so tocke, ki lezijo na vseh treh ravninah hkrati. Resevanja sistemov z vec kottremi neznankami si graficno ne moremo predstavljati.
4.4 Naloge s postopki za resevanje
1. Dan je sistem enacb5x − 6y + az = 32x − 3y + 2z = 24x − 5y + 2z = 1
.

50 POGLAVJE 4. SISTEMI LINEARNIH ENACB
a) Za katere vrednosti parametra a sistem ni resljiv?
b) Za a = 4 resimo dani sistem.
Resitev:
a) Zapisimo razsirjeno matriko sistema in jo preoblikujmo z Gaussovo elimi-nacijo:
5 −6 a | 33 −3 2 | 24 −5 2 | 1
≈
5 −6 a | 30 3 10− 3a | 10 −3 −2 | −5
≈
5 −6 a | 30 3 10− 3a | 10 0 8− 3a | −4
.
Sistem ne bo resljiv, ko bo rang(A) < rang(A|B), torej, ko bo
8− 3a = 0,
3a = 8,
a =3
8.
b) Ce je a = 4, je preoblikovana matrika sistema
5 −6 a | 30 3 −2 | 10 0 −4 | −4
.
Iz zadnje vrstice sledi:−4z = −4,
z = 1.
Iz druge vrstice sledi:3y − 2z = 1,
3y − 2 = 1,
y = 1.
Iz prve vrstice sledi:5x− 6y + 4z = 3,
5x− 6 + 4 = 3,
x = 1.
Dobimo resitev R = {(1, 1, 1)}.

4.4. NALOGE S POSTOPKI ZA RESEVANJE 51
2. Ugotovimo, za katere vrednosti parametra a ima homogeni sistem samo triv-ialno resitev
x + y + z = 0ax + 4y + z = 06x + (a + 2)y + z = 0
.
Resitev: Tudi to nalogo bi lahko resili na podoben nacin kot zgornjo. Zapisalibi matriko sistema, jo preoblikovali z Gaussovo eliminacijo in dolocili a tako,da bi bil rang matrike enak stevilu neznank, to je 3. Kar pomeni, da nobenavrstica ne bi smela biti v celoti nicelna. V primeru pa, ko imamo kvadratenhomogen sistem enacb (stevilo enacb in stevilo neznank se ujemata), lahko nal-ogo resimo se enostavneje. Velja namrec, ce je rang matrike sistema rang(A)enak stevilu neznank, je det(A) 6= 0 in, ce je rang matrike sistema manjsi odstevila neznank, potem je det(A) = 0. V nasem primeru zelimo, da je rangenak stevilu neznank, torej mora biti determinanta razlicna od 0.
Izracunajmo determinanto matrike sistema
∣∣∣∣∣∣
1 1 1a 4 16 (a + 2) 1
∣∣∣∣∣∣= 4 + 6 + a(a + 2)− 24− a− (a + 2) = a2 − 16.
Determinanta mora biti razlicna od 0:
a2 − 16 6= 0,
(a− 4)(a + 4) 6= 0,
a 6= 4,
a 6= −4.
Sistem ima samo trivialno resitev za a ∈ R\{−4, 4}.

52 POGLAVJE 4. SISTEMI LINEARNIH ENACB

Poglavje 5
Linearno programiranje
5.1 Problem linearnega programiranja
Na veliko podrocjih kot so npr. logistika, ekonomija, kmetijstvo srecamo probleme,ki jih lahko matematicno zapisemo takole:Dolociti je potrebno vrednosti spremenljivk x1, x2, . . . , xs, ki zadoscajo naslednjimpogojem:
x1 ≥ 0, x2 ≥ 0, . . . , xs ≥ 0
in linearnim enacbam ali neenacbam
a11x1 + . . . + a1sxs T b1
.....................
am1x1 + . . . + amsxs T bm
tako, da ima funkcija
z(x1, . . . , xs) = c1x1 + . . . + csxs
minimum ali maksimum. Takemu problemu recemo splosni problem linearnegaprogramiranja. Pri tem sta m in s poljubni naravni stevili. Koeficienti aij in cj
pri spremenljivkah v neenacbah in funkciji z so poljubna realna stevila. Stevila nadesni strani neenacb so pa vedno poljubna nenegativna stevila. Linearne neenacbeimenujemo omejitve. Funkciji z pa pravimo namenska ali kriterialna funkcija.
Vsak problem linearnega programiranja lahko resimo s simpleks-metodo. Pove-jmo, da brez racunalnika lahko resimo samo linearne probleme z majhnim stevilomspremenljivk in pogojev. Mi bomo resevali le probleme, v katerih nastopata dvespremenljivki x1 in x2. Take probleme pa lahko resimo z graficno metodo.
53

54 POGLAVJE 5. LINEARNO PROGRAMIRANJE
5.2 Graficna metoda
V tem primeru nam omejitve dolocajo konveksno obmocje (zaprto ali odprto) vravnini in zato je optimalno resitev mogoce poiskati graficno. Graficno metodobomo razlozili na primeru.
Zgled 27. Za obdelavo dveh kultur uporabljamo tri vrste strojev. Za prvo kulturopotrebujemo na enoto povrsine 15 strojnih ur drugega in 30 strojnih ur tretjega stroja.Za drugo kulturo pa potrebujemo na enoto povrsine 10 strojnih ur prvega in 60 stro-jnih ur tretjega stroja. Ob tem imamo na razpolago 800 strojnih ur prvega, 1350strojnih ur drugega in 5700 strojnih ur tretjega stroja. Kako bi morale biti zasejanepovrsine s prvo in drugo kulturo, da bi bil strojni park maksimalno izkoriscen? Ko-liko strojnih ur posameznih strojev bomo potrebovali pri optimalnem programu setve?
Oznacimo z x1 povrsino prve kulture in z x2 povrsino druge kulture. Potrebujemo10 strojnih ur prvega stroja na enoto povrsine druge kulture, kar skupaj znasa 10x2
strojnih ur. Na razpolago imamo 800 ur, zato je
10x2 ≤ 800.
Potrebujemo 15 strojnih ur drugega stroja na enoto povrsine prve kulture, kar skupajznasa 15x1 strojnih ur. Na razpolago imamo 1350 ur, zato je
15x2 ≤ 1350.
Potrebujemo 30 strojnih ur tretjega stroja na enoto povrsine prve kulture in 60 stro-jnih ur tretjega stroja na enoto povrsine druge kulture, kar skupaj znasa 30x1 +60x2
strojnih ur. Na razpolago imamo 5700 ur, zato je
30x1 + 60x2 ≤ 5700.
Tem omejitvam dodamo se dve
x1 ≥ 0, x2 ≥ 0,
ker povrsina kulture ne more biti negativna. Dolocimo se namensko funkcijo: zakulturo x1 potrebujemo 45 strojnih ur, za kulturo x2 pa 70 strojnih ur, kar skupajznasa 45x1 + 70x2, torej je
zmax = 45x1 + 70x2.
Cilj je, da najdemo maksimalno vrednost funkcije zmax = 45x1+70x2 na konveksnemobmocju, ki je doloceno z neenacbami. Pravkar zapisano strnimo.Matematicna formulacija problema:

5.2. GRAFICNA METODA 55
x1 ≥ 0, x2 ≥ 010x2 ≤ 80015x1 ≤ 1350
30x1 + 60x2 ≤ 5700zmax = 45x1 + 70x2
Najprej bomo narisali premice:
x1 = 0, x2 = 0,x2 = 80,x1 = 90,
x1 + 2x2 = 190.
Slika 5.1: Zgled 27.
Vsaka linearna neenacba doloca polravnino. Neenacba x1 ≥ 0 predstavlja vse tockeprvega in cetrtega kvadranta vkljucno s ordinatno osjo. Neenacba x2 ≥ 0 predstavljavse tocke prvega in drugega kvadranta vkljucno s abcisno osjo. Neenacba x1 ≤ 90doloca polravnino, ki je na desni strani ograjena s premico x1 = 90 (vzporednicas ordinatno osjo). Neenacba x2 ≤ 80 doloca polravnino, ki je navzgor omejena spremico x2 = 80 (vzporednica z abcisno osjo). Nazadnje, dobimo se polravnino, kijo doloca premica 30x1 + 60x2 = 5700 in vse tocke pod njo. Presek vseh petih pol-ravnin je konveksno obmocje srafirano na sliki 5.1. Vzemimo sedaj poljubno tocko iz

56 POGLAVJE 5. LINEARNO PROGRAMIRANJE
oznacenega obmocja, na primer (20, 20) in izracunajmo vrednost namenske funkcijez v tej tocki:
Z(20, 20) = 45x1 + 70x2 = 2300.
Od tod dalje sledi, da obstaja neskoncno mnogo tock iz tega obmocja, katerim na-menska funkcija priredi vrednost 2300 (vse tocke, ki lezijo na premici 45x1 +70x2 =2300). Nas te tocke ne bodo zanimale, ker iscemo resitev linearnega problema.Namrec znano je, ce ima namenska funkcija maksimalno (minimalno) vrednost nakonveksnem obmocju, potem jo ima na robu konveksnega obmocja. Izracunajmovrednosti te funkcije v ogliscih O(0, 0), A(0, 80), B(30, 80), C(90, 50) in D(90, 0). Na-menska funkcija tem tockam zaporedoma priredi vrednosti 0, 5600, 6950, 7550 in 4050.Namenska funkcija maksimalno vrednost doseze v tocki C, torej je C optimalnatocka. Do optimalne resitve lahko pridemo po krajsi poti: narisemo premico z = 0,to je crtkana crta, ki poteka skozi koordinatno izhodisce. Lahko bi narisali, katerokoli drugo premico (npr. z = 1500). Premico z = 0 smo izbrali, ker jo najhitrejenarisemo. Povejmo, da je ta premica vzporedna premici z = 2300, se vec vzporednaje premici z = k, kjer je k ∈ R. Ce premico z = 0 vzporedno premaknemo, dosezenamenska funkcija maksimalno vrednost v tocki C, ki znasa 7550. Torej, da bi bilstrojni park maksimalno izkoriscen moramo posejati 90 enot prve in 50 enot drugekulture. Pri takem programu setve potrebujemo 500 ur prvega stroja, 1350 ur drugegastroja in 5700 ur tretjega stroja.
5.3 Dualni problem
Vsak problem linearnega programiranja (primarni linearni problem) ima svoj du-alni linearni problem. Problema sta med seboj povezana tako, da imata enakivrednosti namenskih funkcij in da lahko dobimo optimalno resitev prvega (pri-marnega) takoj, ko poznamo optimalno resitev drugega (dualnega). Oglejmo sipojem primarnega linearnega problema in njegovega dualnega linearnega problemana primeru. Se prej pa definirajmo prehrambeni problem linearnega programiranja.Pri prehrambenem problemu imamo na voljo n krmil z znano sestavo in ceno. Iscemotako mesanico krmil, da bodo v njej vse sestavine v vsaj predpisani kolicini, ob tempa mora biti mesanica krmil najcenejsa.
Zgled 28. Dve komponenti V1 in V2 lahko dobimo v dveh krmilih K1 in K2. Prvokrmilo vsebuje enoto prve in 4 enote druge komponente in stane 24 denarnih enot.Drugo krmilo vsebuje 5 enot prve in enoto druge komponente in stane 25 denarnihenot. Z nakupom zelimo dobiti najmanj 17 enot prve in 11 enot druge komponente.Dolocimo najcenejso mesanico krmil.
Zaradi preglednosti si zapisimo podatke v tabelo 5.1.

5.3. DUALNI PROBLEM 57
Z x1 oznacimo kolicino prvega in z x2 kolicino drugega krmila. Ker ena enotaprvega krmila vsebuje eno enoto prve komponente in ena enota drugega krmila 5enot prve komponente, imamo v mesanici skupaj
1x1 + 5x2
enot prve komponente. Upostevati pa moramo, da zelimo imeti najmanj 17 enotprve komponente, zato je
1x1 + 5x2 ≥ 17.
Ker ena enota prvega krmila vsebuje 4 enote druge komponente in ena enota drugegakrmila eno enoto druge komponente, imamo v mesanici skupaj
4x1 + 1x2
enot druge komponente. Upostevati pa moramo, da zelimo imeti najmanj 11 enotdruge komponente, zato je
4x1 + 1x2 ≥ 11.
Tema dvema omejitvama dodamo se
x1 ≥ 0, x2 ≥ 0,
ker sta kolicini obeh krmil nenegativni. Ce je cena enote prvega krmila 24 denarnihenot in cena enote drugega krmila 25 denarnih enot, je
zmin = 24x1 + 25x2.
Najprej moramo graficno resiti sistem neenacb, ki nam da konveksno obmocje vravnini. Nato je potrebno se dolociti, kje na tem obmocju ima kriterialna funkcijaminimalno vrednost. Strnimo pravkar povedano:Matematicna formulacija problema:
x1 ≥ 0, x2 ≥ 01x1 + 5x2 ≥ 174x1 + 1x2 ≥ 11
zmin = 24x1 + 25x2
K1 K2 kolicinaV1 1 5 17V2 4 1 11
cena 24 25
Tabela 5.1: Tabela za zgled 28.
58 POGLAVJE 5. LINEARNO PROGRAMIRANJE
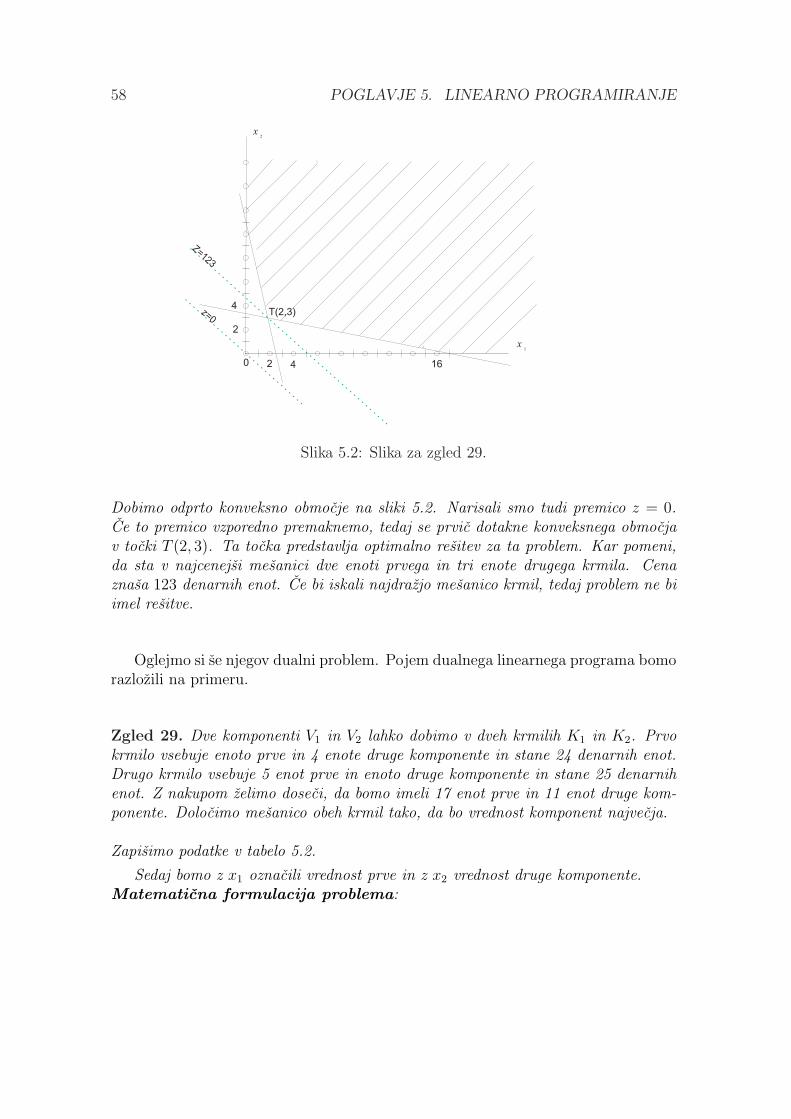
Slika 5.2: Slika za zgled 29.
Dobimo odprto konveksno obmocje na sliki 5.2. Narisali smo tudi premico z = 0.Ce to premico vzporedno premaknemo, tedaj se prvic dotakne konveksnega obmocjav tocki T (2, 3). Ta tocka predstavlja optimalno resitev za ta problem. Kar pomeni,da sta v najcenejsi mesanici dve enoti prvega in tri enote drugega krmila. Cenaznasa 123 denarnih enot. Ce bi iskali najdrazjo mesanico krmil, tedaj problem ne biimel resitve.
Oglejmo si se njegov dualni problem. Pojem dualnega linearnega programa bomorazlozili na primeru.
Zgled 29. Dve komponenti V1 in V2 lahko dobimo v dveh krmilih K1 in K2. Prvokrmilo vsebuje enoto prve in 4 enote druge komponente in stane 24 denarnih enot.Drugo krmilo vsebuje 5 enot prve in enoto druge komponente in stane 25 denarnihenot. Z nakupom zelimo doseci, da bomo imeli 17 enot prve in 11 enot druge kom-ponente. Dolocimo mesanico obeh krmil tako, da bo vrednost komponent najvecja.
Zapisimo podatke v tabelo 5.2.
Sedaj bomo z x1 oznacili vrednost prve in z x2 vrednost druge komponente.Matematicna formulacija problema:

5.3. DUALNI PROBLEM 59
Slika 5.3: Slika za zgled 29.
x1 ≥ 0, x2 ≥ 0x1 + 4x2 ≤ 245x1 + x2 ≤ 25
zmax = 17x1 + 11x2
Neenacbam ustreza konveksno obmocje na sliki 5.3. Namenska funkcija dosezemaksimalno vrednost v tocki T (4, 5). Vrednost namenske funkcije je 123. Kar jepricakovano, saj smo povedali, da je vrednost namenske funkcije primarnega in du-alnega linearnega problema pri optimalni resitvi vedno ista.
Kot smo ze omenili lahko k vsakemu linearnemu programu priredimo dualnilinearni program. Pri tem velja, da iz primarnega dobimo dualnega tako, da matrikokoeficientov v neenacbah transponiramo (to, kar je pisalo v vrsticah pise sedaj vstolpcih in obratno), neenacaje obrnemo, maksimum zamenjamo z minimumom,koeficienti ciljne funkcije postanejo omejitve v neenacbah, omejitve pa koeficienticiljne funkcije dualnega programa.
V1 V2 cenaK1 1 4 24K2 5 1 25
kolicina 17 11
Tabela 5.2: Tabela za zgled 29.

60 POGLAVJE 5. LINEARNO PROGRAMIRANJE
P1 P2 P3
S14 3 1 900
S25 2 3 700
300 500 800 1600
Tabela 5.3: Tabela za zgled 30.
Med problemi, ki se pojavljajo v kmetijstvu je zelo pogost tudi transportni prob-lem. Transportni problem resuje problem prevoza dobrin. Transportni problem jedefiniran takole: imamo n izvorov dobrin in m ponorov dobrin, poznani so prevoznistroski od posameznih izvorov do posameznih ponorov. Poznane so tudi kapaciteteizvorov in potrebe ponorov (ponudba, narocilo). Iscemo tak nacrt prevoza, da bodoprevozni stroski najmanjsi. Ce so kapacitete izvorov in ponorov enake recemo, daje transportni problem zaprt. Transportni problem je odprt, kadar so kapaciteteizvorov vecje od potreb ponorov. Oglejmo si resevanje zaprtega transportnega prob-lema na naslednjem primeru:
Zgled 30. Dva silosa oskrbujeta troje pitalisc. Prvi silos lahko izda dnevno 900 enothrane, drugi pa 700 enot hrane. Prvo pitalisce potrebuje 300, drugo pitalisce 500 intretje 800 enot hrane na dan. Cena prevoza enote hrane od prvega silosa k prvemupitaliscu je 4, do drugega 3 in do tretjega eno denarno enoto. Prevoz enote hraneod drugega silosa do prvega pitalisca stane 5, do drugega pitalisca 2 in do tretjega3 denarne enote. Dolocimo tak nacrt prevoza hrane, da bodo prevozni stroski naj-manjsi.
Zaradi preglednosti si zapisimo podatke v tabelo 5.3.Najprej vpeljimo neznanki x1 in x2. Kolicino hrane, ki bo pripeljana od prvega
silosa do prvega pitalisca oznacimo z x1, x2 pa naj bo kolicina, ki bo pripeljana odprvega silosa k drugemu pitaliscu. Ker je potreba prvega pitalisca 300 enot, bomood drugega silosa k prvemu pitaliscu pripeljali le 300 − x1 enot hrane. Podobnolahko od drugega silosa do prvega pitalisca pripeljemo 500−x2 enot hrane. Podobnorazmisljamo tudi v preostalih primerih. V tabeli 5.4. smo vpisali kolicine pripeljanehrane na vseh relacijah.
Omejitve dobimo na osnovi dejstva, da je transportirana kolicina hrane nenega-tivna:
x1 ≥ 0, x2 ≥ 0900− x1 − x2 ≥ 0
300− x1 ≥ 0500− x2 ≥ 0
x1 + x2 − 100 ≥ 0

5.3. DUALNI PROBLEM 61
P1 P2 P3
S1 x14 x2
3 900− x1 − x21 900
S2 300− x15 500− x2
2 x1 + x2 − 100 3 700300 500 800 1600
Tabela 5.4: Tabela za zgled 30 (dopolnjena).
Slika 5.4: Slika za zgled 30.
Kriterialno funkcijo izracunamo tako, da posamezne kolicine pomnozimo s ceno pre-voza na ustrezni relaciji:
zmin = 4x1 +3x2 +1(900−x1−x2)+5(300−x1)+2(500−x2)+3(x1 +x2− 100) =x1 + 3x2 + 3100.
Najprej narisemo premice x1 = 0, x2 = 0, x1 = 300, x2 = 500, 900 − x1 − x2 = 0 inx1 + x2− 100 = 0, ki glede na omejitve dolocajo oznaceno obmocje na sliki 5.4. Kotvzorcno namensko funkcijo smo izbrali premico z = 3100, torej narisali smo premicoy = −x
3, ki je na sliki 5.4 narisana crtkano. Ce to premico vzporedno premikamo
navzgor, vrednost funkcije z raste. Optimalna resitev je v tocki (100,0). Prikazimose nacrt prevoza v tabeli 5.5.
Tudi odprte transportne probleme lahko resimo z uporabo metode linearnegaprogramiranja. Problem preoblikujemo v zaprti transportni problem. To naredimo

62 POGLAVJE 5. LINEARNO PROGRAMIRANJE
P1 P2 P3 SkupajS1 100 0 800 900S2 200 500 0 700
Skupaj 300 500 800 1600
Tabela 5.5: Nacrt prevoza za zgled 30.
tako, da dodamo navideznega potrosnika (ponor), h kateremu je pripeljana preostalakolicina dobrin. Stroski na relacijah do tega navideznega ponora pa so 0.
Zgled 31. Imamo dva silosa in dvoje pitalisc. Kapaciteta prvega silosa je dnevno800 enot hrane, kapaciteta drugega pa 600 enot. Prvo pitalisce potrebuje na dan400 enot, drugo pitalisce pa 700 enot hrane. Cene prevoza enote hrane dnevno medposameznimi silosi in pitalisci prikazuje naslednja tabela 5.6.
P1 P2
S1 6 5S2 4 3
Tabela 5.6: Cene prevozov na posameznih relacijah.
Kako moramo razvazati hrano, da bo skupna cena prevoza minimalna? Rezultateprikazimo v tabeli. Koliksna je ta cena?
Uvedemo neznanki x1 in x2 ter dodamo navidezno pitalisce P3. Glej tabelo 5.7.
P1 P2 P3
S1 x16 x2
5 800− x1 − x20 800
S2 400− x14 700− x2
3 x1 + x2 − 500 0 600400 700 300 1400
Tabela 5.7: Tabela za zgled 31.
Iz tabele 5.7. zapisemo omejitve:

5.3. DUALNI PROBLEM 63
x1 ≥ 0, x2 ≥ 0800− x1 − x2 ≥ 0
400− x1 ≥ 0700− x2 ≥ 0
x1 + x2 − 500 ≥ 0
Izracunajmo se namensko funkcijo z:
zmin = 6x1 + 5x2 + 4(400− x1) + 3(700− x2) = 2x1 + 2x2 + 3700.
Problem je graficno resen na sliki 5.5. V tem primeru ima problem neskoncno
Slika 5.5: Slika za zgled 31.
optimalnih resitev, vse tocke na daljici AB predstavljajo iskano resitev problema.Transportni stroski so 4700 denarnih enot. Prevoz za x1 = 200 in x2 = 300 jeprikazan v tabeli 5.8.
P1 P2
S1 200 300S2 200 400
Tabela 5.8: Cene prevozov na posameznih relacijah.

64 POGLAVJE 5. LINEARNO PROGRAMIRANJE
5.4 Naloge s postopki za resevanje
1. Na voljo imamo dve krmili. V enoti prvega krmila 0, 4 prve sestavine in 0, 6druge sestavine. V enoti drugega krmila pa je 0, 3 prve sestavine in 0, 7 drugesestavine. V krmni mesanici moramo imeti najmanj 12 enot prve sestavinein 42 enot druge sestavine. Upostevati moramo, da sme biti najvec 21 enotdruge sestavine iz drugega krmila. Dolocimo najcenejso mesanico obeh krmil,ce vemo, da stane enota prvega krmila 12 denarnih enot in enota drugega kr-mila 5 denarnih enot.
Resitev: Z x1 oznacimo kolicino prvega krmila in z x2 kolicino drugega krmila.Matematicna formulacija problema:
x1 ≥ 0, x2 ≥ 00, 4x1 + 0, 3x2 ≥ 120, 6x1 + 0, 7x2 ≥ 42
0, 7x2 ≤ 21zmin = 12x1 + 5x2
Iz slike 5.6 je razvidno, da je mesanica najcenejsa, ce imamo 35 enot prvegain 30 enot drugega krmila ter stane 570 denarnih enot.
2. Kmetijska zadruga ima 150 ha zemljisca. Z letnim nacrtom je sklenila, dabo od tega najmanj 70 ha zasejala z dvema kulturama. Zaradi tehnoloskihpostopkov mora drugo kulturo posejati na najmanj polovicni povrsini prvekulture. Vendar zasejana povrsina z drugo kulturo ne sme biti vecja od za-sejane povrsine s prvo kulturo. Zasejana povrsina z drugo kulturo pa ne smebiti vecja od 65 ha. Dolocimo program setve tako, da bo zasejana povrsina sprvo kulturo najvecja.
Resitev: Oznacimo z x1 povrsino s prvo kulturo in z x2 povrsino z drugokulturo.Matematicna formulacija problema:
x1 ≥ 0, x2 ≥ 0x1 + x2 ≤ 150x1 + x2 ≥ 70
x1≤2x2
x1 ≥ x2
x2 ≤ 65zmax = x1

5.4. NALOGE S POSTOPKI ZA RESEVANJE 65
Na sliki 5.7 vidimo konveksno obmocje, ki zadosca vsem neenacbam, to jepetkotnik ABCDE, kjer je
A(35, 35), B(65, 65), C(85, 65), D(100, 50), E(1403
, 703).
Takoj vidimo, da ima namenska funkcija z maksimalno vrednost v tocki D.Do resitve lahko pridemo tudi drugace. Narisemo premico z = 0 (to je y os).Ce premico premikamo v desno (vrednost namenske funkcije se povecuje),potem srafirano obmocje zapusti v tocki D, ki predstavlja optimalno resitev.Kmetijska zadruga mora zasejati 100 ha prve in 50 druge kulture.
3. Kmetijska zadruga zeli sestaviti krmno mesanico iz dveh krmil. Prvo krmilokupuje pri njegovem proizvajalcu, drugo pa prideluje sama. V obeh krmilihsta elementa A in B. V krmni mesanici zelimo imeti najmanj 70 enot ele-menta A in 90 enot elementa B. V prvem krmilu je 5 enot elementa A in 9enot elementa B. V drugem krmilu je 7 enot elementa A in 5 enot elementaB. Na vsako enoto prvega krmila moramo imeti v mesanici najvec dve enotidrugega krmila. V krmni mesanici pa ne sme biti vec kot 13 enot drugega kr-mila. Dolocimo program mesanja tako, da bo zadruga potrebovala minimalnokolicino kupljenega krmila.
Resitev: Oznacimo z x1 kolicino prvega krmila, ki ga zadruga kupuje in z x2
kolicino drugega krmila, ki ga prideluje sama.Matematicna formulacija problema:
x1 ≥ 0, x2 ≥ 05x1 + 7x2 ≥ 709x1 + 5x2 ≥ 90
x1 ≥ x2
2
x2 ≤ 13zmin = x1
Problem je graficno resen na sliki 5.8. Iskano optimalno tocko T dobimo tako,da izracunamo presecisce premic x1 = x2
2in 9x1 + 5x2 = 90. Najprej prvo
enacbo pomnozimo z 2. Dobimo x2 = 2x1, kar nato vstavimo v drugo enacbo
9x1 + 5(2x1) = 90.
Z nekaj malega racunanja dobimo
x1 = 9019
in x2 = 18019
.
66 POGLAVJE 5. LINEARNO PROGRAMIRANJE
Program mesanja, ki ga mora sestaviti kmetijska zadruga je 9019
enot prvega in18019
enot drugega krmila.

5.4. NALOGE S POSTOPKI ZA RESEVANJE 67
Slika 5.6: Slika za nalogo 1.
Slika 5.7: Slika za nalogo 2.

68 POGLAVJE 5. LINEARNO PROGRAMIRANJE
Slika 5.8: Slika za nalogo 3.

Poglavje 6
Vektorji
6.1 Osnovne definicije vektorjev
Vektor je geometrijska (ali fizikalna) kolicina definirana z velikostjo in smerjo (npr.sila, hitrost, moment itd.). Obicajno prikazujemo vektorje s puscico, ki ji oznacimosmer. Vektorje oznacimo z crko nad katero je puscica (na primer ~a). Na sliki 6.1 jetocka A zacetna tocka in tocka B koncna tocka vektorja. Vcasih zapisemo vektortudi tako, da zapisemo puscico nad oznaki zacetne in koncne tocke. Dolzina daljiceoznacuje velikost vektorja. Velikosti (dolzini) vektorja pravimo tudi modul vek-torja. Vektor nic ~0 je vektor, pri katerem se zacetek in konec ujemata; njegovmodul je 0, smer pa ni dolocena. Enotski vektor ima modul 1.
Kadar imamo kolicino, ki je podana le z velikostjo ne pa tudi s smerjo, ji pravimoskalar (npr. gostota, temperatura, masa, moc itd.).
Vektorje obicajno opazujemo v tridimenzionalnem prostoru. Ce vektorja v pros-toru ne smemo premikati, pravimo, da je vezan na tocko. Kadar smemo vektorpremikati vzdolz premice na kateri lezi, pravimo, da je vektor vezan na premico.Ce smemo vektor poljubno vzporedno premikati, pravimo, da imamo opravka sprostim vektorjem. Dva prosta vektorja sta enaka, ce sta enako velika in ju lahkos paralelnim premikom premaknemo v isto zacetno tocko. Po takem premiku, semorata tudi koncni tocki ujemati. Z drugimi besedami vektorja sta enako velika,gledata v isto smer in lezita na vzporednih premicah. Vektorja vezana na premico
Slika 6.1: Vektor.
69

70 POGLAVJE 6. VEKTORJI
Slika 6.2: Sestevanje vektorjev.
sta enaka tedaj, ko lahko enega premaknemo vzdolz premice tako, da sovpada zdrugim vektorjem. Ce sta vektorja vezana na tocko enaka, tedaj imata isto zacetnoin isto koncno tocko.
Dva vektorja sta nasprotna, ce lezita na vzporednih premicah, sta enako velikain kazeta v nasprotno smer. Nasprotni vektor vektorja ~a oznacimo z −~a. Ce lezitadva vektorja na vzporednih premicah (ali na isti premici) pravimo, da sta kolin-earna. Trije (ali vec) vektorji so komplanarni, ce lezijo na isti (ali na vzporednih)ravnini (ravninah).
6.2 Osnovne operacije z vektorji
Definicija 1. Vektorja ~a in ~b sestevamo tako, da premaknemo zacetek vektorja ~b vkoncno tocko vektorja ~a (glej sliko 6.2). Vsota vektorjev
~a +~b
je vektor, ki ima zacetno tocko v zacetni tocki vektorja ~a in koncno tocko v koncnitocki vektorja ~b. Vec vektorjev sestevamo tako, da zacetna tocka naslednjega vektorjasovpada s koncno tocko predhodnega vektorja.
Vsota vektorja ~a in njegovega nasprotnega vektorja −~a je vektor nic, to je
~a + (−~a) = ~0.
Lastnosti vsote vektorjev
1. Za vsoto velja komutativnostni zakon: ~a +~b = ~b + ~a.
2. Za vsoto velja asociativnostni zakon: (~a +~b) + ~c = ~a + (~b + ~c).
Definicija 2. Razlika vektorjev ~a−~b je vektor, ki ima zacetno tocko v koncni tockivektorja ~b in koncno tocko v koncni tocki vektorja ~a (glej sliko 6.3).

6.3. LINEARNA KOMBINACIJA VEKTORJEV 71
Slika 6.3: Odstevanje vektorjev.
Zgornji definiciji odstevanja vektorjev je ekvivalentna naslednja definicija: razlikavektorjev ~a −~b je vektor ~c, ki ga dobimo tako, da vektorju ~a pristejemo nasprotnovrednost vektorja ~b, torej
~c = ~a + (−~b).
Definicija 3. Produkt m~a vektorja ~a s skalarjem m je vektor, ki je vzporeden vek-torju ~a, je |m|-krat vecji od vektorja ~a, enako usmerjen kot vektor ~a, ce je m poz-itivno stevilo in nasprotno usmerjen, ce je m negativno stevilo. Za m = 0 pa m~apredstavlja vektor nic.
Lastnosti mnozenja s skalarjemNaj bosta ~a in ~b vektorja ter α in β skalarja, tedaj velja:
1. 1~a = ~a.
2. (α + β)~a = α~a + β~b.
3. α(~a +~b) = α~a + α~b.
4. α(β~a) = (αβ)~a.
6.3 Linearna kombinacija vektorjev
Denimo, da imamo n vektorjev
~a1, ~a2, . . . , ~an
in n skalarjevα1, α2, . . . , αn
in tvorimo naslednji izraz
α1 ~a1 + α2 ~a2 + . . . + αn ~an.
Tedaj imenujemo tako vsoto s skalarji pomnozenih vektorjev linearna kombinacijavektorjev. Linearno kombinacijo v kateri so vsi koeficienti αi enaki nic imenujemo

72 POGLAVJE 6. VEKTORJI
trivialna linearna kombinacija. Vrednost trivialne kombinacije je vselej ~0. Ceje vsaj eden αi razlicen od nic, tedaj govorimo o netrivialni kombinaciji.
Vektorji
~a1, ~a2, . . . , ~an
so linearno odvisni, ce obstajajo stevila
α1, α2, . . . , αn,
ki niso vsa enaka nic, pa je vendar vrednost linearne kombinacije enaka ~0. Vektorjiso linearno neodvisni, ce ne obstaja netrivialna linearna kombinacija, to je iz
α1 ~a1 + α2 ~a2 + . . . + αn ~an = ~0
sledi
α1 = α2 = . . . = αn = 0.
Dva vektorja sta linearno odvisna natanko tedaj, ko sta kolinearna. Trije vektorjiso linearno odvisni natanko tedaj, ko so komplanarni. Ocitno velja: vektor ~a jekolinearen z vektorjem ~b, ce je
~a = α~b
za neki skalar α. Vektorji ~a,~b,~c so komplanarni, ce je
~c = α~a + β~b
za neka skalarja α, β. Recemo, da se vektor ~c linearno izraza oziroma je linearnakombinacija vektorjev ~a in ~b.
6.4 Vektorji v pravokotnem koordinatnem sistemu
Denimo, da imamo pravokoten koordinatni sistem in v njem tri vektorje ~ax, ~ay, ~az
v smeri posameznih koordinatnih osi. V takem koordinatnem sistemu so vektorjilinearno neodvisni. Te vektorje lahko zapisemo tudi kot
~ax = ax~i,
~ay = ay~j,
~az = az~k.
Pri cemer so ~i,~j,~k vektorji dolzine 1, ki lezijo v smeri x, y in z osi. Ocitno soti vektorji linearno neodvisni. Pri tem so ax, ay in az koeficienti s katerimi sopomnozeni ti vektorji.

6.4. VEKTORJI V PRAVOKOTNEM KOORDINATNEM SISTEMU 73
Slika 6.4: Vektor v pravokotnem koordinatnem sistemu.
Iz slike 6.4 vidimo, da lahko vsak vektor zapisemo kot vsoto
~a = ax~i + ay
~j + az~k.
Ob tem imenujemo trojico stevil ax, ay, az pravokotne koordinate vektorja (alikomponente vektorja). Vektor lahko poslej zapisemo s pravokotnimi koordinatamitudi tako
~a = (ax, ay, az).
Naj bo ~a = (ax, ay, az) in ~b = (bx, by, bz), tedaj je
~a +~b = (ax + bx, ay + by, az + bz),
~a−~b = (ax − bx, ay − by, az − bz),
α~a = (αax, αay, αaz).
Dolzino vektorja ~a bomo oznacevali z |~a| in jo izracunamo po formuli
|~a| =√
a2x + a2
y + a2z.
Krajevni vektor tocke T je vektor ~r =−→OT od koordinatnega izhodisca O do
tocke T . Koordinate tocke T (x, y, z) so enake komponentam krajevnega vektorja ~r =(x, y, z). Naj bosta T1(x1, y1, z1) in T2(x2, y2, z2) tocki v ravnini, tedaj so komponente
vektorja−−→T1T2 enake razlikam koordinat koncne in zacetne tocke vektorja
−−→T1T2 = (x2 − x1, y2 − y1, z2 − z1).

74 POGLAVJE 6. VEKTORJI
Slika 6.5: Trikotnik ABC.
Zgled 32. Pokazimo, da vektorji ~a = (−1, 3, 3), ~b = (0, 4, 2) in ~c = (3, 1,−4) lezijov isti ravnini.
Ce vektorji lezijo v isti ravnini, tedaj se vsak izmed njih linearno izraza s preostal-ima dvema. Zapisimo vektor ~a kot linearno kombinacijo vektorjev ~b in ~c. Torej ob-stajata skalarja α1 in α2, pri cemer je vsaj eden od skalarjev razlicen od 0. Zapisimo
~a = α1~b + α2~c,
nadalje je
(−1, 3, 3) = α1(0, 4, 2) + α2(3, 1,−4).
Kar velja za vektorje, velja tudi za komponente, zato dobimo tri enacbe
0α1 + 3α2 = −14α1 + 1α2 = 32α1 − 4α2 = 3
.
Iz prve enacbe izracunamo α2 = −13. Ce drugo enacbo pomnozimo z 4 in jo
pristejemo k zadnji dobimo 15 = 18α1, kar implicira α1 = 56. Nazadnje se pre-
verimo, da izracunana α1 in α2 ustrezata drugi in tretji enacbi, kar pa prepuscamobralcu. Torej je
~a =5
6~b− 1
3~c.
Zgled 33. Imamo tocke A(5, 3, 7), B(7, 1, 3), C(2, 0, 5). Dolocimo tocko S, ki jerazpolovisce stranice AB in izracunajmo dolzino stranice b. Koordinate tocke S
sovpadajo s komponentami krajevnega vektorja−→OS. Iz slike je razvidno, da je
−→OS =
−→OA +
1
2
−→AB,
kjer je −→AB = (7− 5, 1− 3, 3− 7) = (2,−2,−4).

6.5. SKALARNI PRODUKT 75
Torej je
−→OS = (5, 3, 7) +
1
2(2,−2,−4) = (5, 3, 7) + (1,−1,−2) = (6, 2, 5).
Stranica b lezi nasproti oglisca B. Dolzina stranice b je enaka dolzini vektorja−→AC.
Vektor −→AC = (2− 5, 0− 3, 5− 7) = (−3,−3,−2).
Izracunajmo se njegovo dolzino
|−→AC| = √9 + 9 + 4 =
√22.
6.5 Skalarni produkt
Definicija 4. Skalarni produkt dveh vektorjev je produkt absolutnih vrednosti obehvektorjev in kosinusa kota, ki ga vektorja oklepata (vektorja imata skupno zacetnotocko):
~a ·~b = |~a||~b| cos ϕ.
Lastnosti skalarnega produktaNaj bodo ~a,~b in ~c vektorji.
1. Skalarni produkt je komutativen: ~a ·~b = ~b · ~a.
2. Skalarni produkt je distributiven: (~a +~b) · ~c = ~a · ~c +~b · ~c.3. Za poljubno realno stevilo k velja (k~a) ·~b = ~a · (k~b) = k(~a ·~b).4. Ce je skalarni produkt dveh vektorjev ~a in ~b enak nic, tedaj je
a) ~a = ~0,~b 6= ~0 ali ~a 6= ~0,~b = ~0.
b) ~a = ~0,~b = ~0.
c) ~a 6= ~0,~b 6= ~0 in cos ϕ = 0, to pa dalje pomeni, da sta vektorja ~a in ~bpravokotna. Velja tudi obratno.
Naj bosta ~a = (ax, ay, az) in ~b = (bx, by, bz) taka od ~0 razlicna vektorja, ki imataskupno zacetno tocko, oklepata kot ϕ in ϕ 6= 00, ϕ 6= 1800. Zacetno tocko smemopoljubno izbrati, pa naj bo ta tocka, kar koordinatno izhodisce O. S tem sta vektorja~a in ~b hkrati tudi krajevna vektorja. Dobimo trikotnik OAB, ki ima v ogliscu Okot, ki je enak kotu ϕ med vektorjema ~a in ~b. Glej sliko 6.6. Po kosinusovem izrekuvelja:
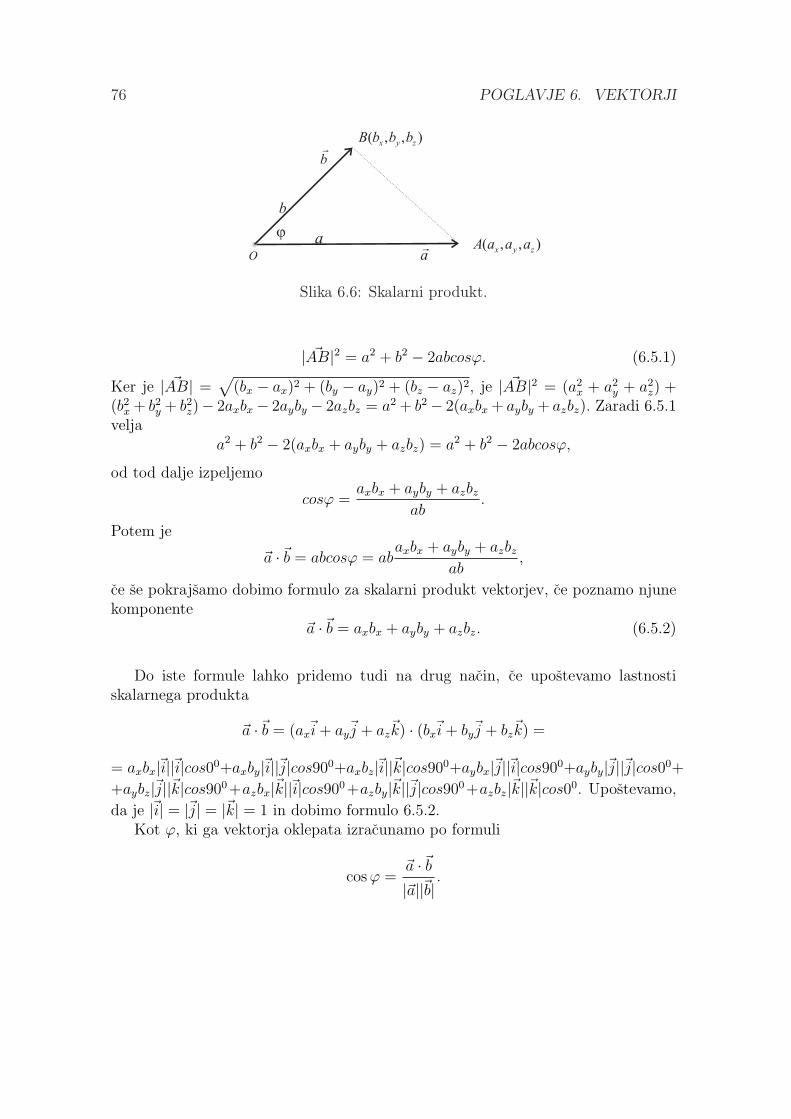
76 POGLAVJE 6. VEKTORJI
Slika 6.6: Skalarni produkt.
| ~AB|2 = a2 + b2 − 2abcosϕ. (6.5.1)
Ker je | ~AB| =√
(bx − ax)2 + (by − ay)2 + (bz − az)2, je | ~AB|2 = (a2x + a2
y + a2z) +
(b2x + b2
y + b2z)− 2axbx− 2ayby − 2azbz = a2 + b2− 2(axbx + ayby + azbz). Zaradi 6.5.1
veljaa2 + b2 − 2(axbx + ayby + azbz) = a2 + b2 − 2abcosϕ,
od tod dalje izpeljemo
cosϕ =axbx + ayby + azbz
ab.
Potem je
~a ·~b = abcosϕ = abaxbx + ayby + azbz
ab,
ce se pokrajsamo dobimo formulo za skalarni produkt vektorjev, ce poznamo njunekomponente
~a ·~b = axbx + ayby + azbz. (6.5.2)
Do iste formule lahko pridemo tudi na drug nacin, ce upostevamo lastnostiskalarnega produkta
~a ·~b = (ax~i + ay
~j + az~k) · (bx
~i + by~j + bz
~k) =
= axbx|~i||~i|cos00+axby|~i||~j|cos900+axbz|~i||~k|cos900+aybx|~j||~i|cos900+ayby|~j||~j|cos00+
+aybz|~j||~k|cos900+azbx|~k||~i|cos900+azby|~k||~j|cos900+azbz|~k||~k|cos00. Upostevamo,
da je |~i| = |~j| = |~k| = 1 in dobimo formulo 6.5.2.Kot ϕ, ki ga vektorja oklepata izracunamo po formuli
cos ϕ =~a ·~b|~a||~b|
.

6.6. VEKTORSKI PRODUKT 77
Slika 6.7: Vektorski produkt.
Zgled 34. Izracunajmo kot med vektorjema ~a = (3, 4, 5) in ~b = (−3, 1,−4). Kotmed vektorjema je dolocen s formulo
cos ϕ =(3, 4, 5) · (−3, 1,−4)√
50√
26=
−25
5√
52,
kar pomeni, da je
ϕ = arccos−25
5√
52.
6.6 Vektorski produkt
Definicija 5. Vektorski produkt, oznacimo ga z ~a ×~b, je vektor ~c, ki stoji pra-vokotno na ravnino, ki jo dana vektorja dolocata. Njegova dolzina je enaka plosciniparalelograma, ki ima za stranici vektorja ~a in ~b, torej
|~a×~b| = |~a||~b| sin ϕ.
Enaka je tudi dvakratni ploscini trikotnika, ki ima za oglisca skupno zacetno tockoin obe koncni tocki vektorjev. Usmerjen pa je pravokotno na oba vektorja tako, daso vektorji ~a, ~b in ~c desno orientirani (to pomeni, ce vektorje vzporedno prenesemov skupno zacetno tocko, tedaj vidi opazovalec s koncne tocke vektorja ~c najkrajsizasuk vektorja ~a v ~b v nasprotni smeri gibanja urinega kazalca (pozitivna smer). Vnasprotnem recemo, da so vektorji levo orientirani.
Koordinate vektorskega produkta vektorjev ~a = (ax, ay, az) in ~b = (bx, by, bz)dobimo z determinanto in sicer
~a×~b =
∣∣∣∣∣∣
i j kax ay az
bx by bz
∣∣∣∣∣∣= (aybz − azby, azbx − axbz, axby − aybx).

78 POGLAVJE 6. VEKTORJI
Zgled 35. Izracunajmo vektorski produkt vektorjev ~a = (3, 2, 1) in ~b = (−1, 4, 2) terploscino paralelograma, ki ga vektorja dolocata.
Vektorski produkt vektorjev je dolocen z determinanto
~a×~b =
∣∣∣∣∣∣
i j k3 2 1−1 4 2
∣∣∣∣∣∣= (0,−7, 14).
Ploscina paralelograma pa je enaka dolzini vektorja ~a×~b, torej
|~a×~b| = √0 + 49 + 196 =
√245 = 7
√5.
Zgled 36. Izracunajmo ploscino trikotnika z oglisci A(1, 0, 4), B(2,−3, 4) in C(−5,−1, 1).
Zapisimo vektorja−→AB = (1,−3, 0) in
−→AC = (−6,−1,−3) in izracunajmo
−→AB ×−→AC =
∣∣∣∣∣∣
i j k1 −3 0−6 −1 −3
∣∣∣∣∣∣= (9, 3,−19).
Torej je 2S =√
81 + 9 + 361 =√
451. Ploscina trikotnika je√
4512
.
Lastnosti vektorskega produkta
1. Vektorski produkt ni komutativen: ~a ×~b 6= ~b × ~a, je pa antikomutativen. Cefaktorja med seboj zamenjamo, tedaj vektorski produkt spremeni predznak~b×~a = −~a×~b, kar sledi iz definicije vektorskega produkta. Pravtako se to lepovidi iz izracuna vektorskega produkta s pomocjo determinante. Ce zamenjamodve vrstici, tedaj determinanta spremeni predznak, njena absolutna vrednostpa se ohrani.
Zgled 37. Vzemimo vektorja iz zgleda 35. Produkt ~b× ~a=(0,7,-14).
2. Vektorski produkt je distributiven za sestevanje: (~a +~b)× ~c = ~a× ~c +~b× ~c.
3. Za vsako realno stevilo k je: (k~a) × ~b = k(~a × ~b) in ~a × (k~b) = k(~a × ~b)(homogenost za mnozenje z realnim stevilom).
4. Ce je vektorski produkt dveh vektorjev ~a in ~b enak nic, tedaj je
a) ~a = ~0,~b 6= ~0 ali ~a 6= ~0,~b = ~0.
b) ~a = ~0,~b = ~0.
c) ~a 6= ~0,~b 6= ~0 in sin ϕ = 0, to pa dalje pomeni, da sta vektorja ~a in ~bkolinearna. Ker je vsak vektor kolinearen s samim seboj, zato je vektorskiprodukt vektorja s samim seboj je enak ~0.

6.7. MESANI PRODUKT 79
Slika 6.8: Paralelepiped, ki ga dolocajo vektorji ~a,~b in ~c.
6.7 Mesani produkt
Definicija 6. Mesani produkt (~a × ~b) · ~c je stevilo, ki je pozitivno, ce so vektorjidesno orientirani in je negativno stevilo, ce so vektorji levo orientirani. Absolutnavrednost mesanega produkta je enaka prostornini paralelepipeda, konstruiranega navektorjih ~a, ~b in ~c (slika 6.8).
Ce je ~a = (ax, ay, az), ~b = (bx, by, bz) in ~c = (cx, cy, cz), tedaj mesani produktnajhitreje izracunamo z determinanto
(~a×~b) · ~c =
∣∣∣∣∣∣
ax ay az
bx by bz
cx cy cz
∣∣∣∣∣∣.
Za uporabo je pomemben geometrijski pomen mesanega produkta. Velikost vek-torja ~t = ~a×~b je ploscina paralelograma, ki ima za stranici vektorja ~a in ~b, njegovasmer pa je pravokotna na ravnino tega paralelograma. Skalarni produkt ~t · ~c pa jeprodukt med velikostjo vektorja ~t in projekcijo vektorja ~c na vektor ~t, torej je to pro-dukt med ploscino paralelograma, ki ima za stranici vektorja s stranicama ~a in ~b terprojekcijo vektorja ~c na pravokotnico k ravnini paralelograma. Ta projekcija je poabsolutni vrednosti enaka visini paralelepipeda, zato je absolutna vrednost mesanegaprodukta enaka prostornini paralelepipeda (prostornina je ploscina osnovne ploskvepomnozena z visino).
Zgled 38. Dan je tetraeder z oglisci A1(0, 2, 2), A2(3, 0,−2), A3(4,−3, 0), A4(0, 0,−5).Izracunajmo njegovo prostornino.
Zapisimo vektorje−−−→A1A2 = (3,−2,−4),
−−−→A1A3 = (4,−5,−2),
−−−→A1A4 = (0,−2,−7),
ti vektorji dolocajo tudi paralelepiped. Dani tetraeder ima enako visino kot ta par-alelepiped, njegova osnovna ploskev pa je za polovico manjsa od osnovne ploskveparalelepipeda. Ker je prostornina piramide trikrat manjsa od prostornine prizme,ki ima enako veliko osnovno ploskev in enako visino kot piramida, je prostornina

80 POGLAVJE 6. VEKTORJI
tetraedra sestkrat manjsa kot prostornina paralelepipeda. Torej je
V = ±1
6
∣∣∣∣∣∣
3 −2 −44 −5 −20 −2 −7
∣∣∣∣∣∣= ±1
669 =
23
2.
Lastnosti mesanega produkta
Naj bodo ~a,~b,~c, ~d vektorji in k skalar.
1. Mesani produkt je homogen v vsakem faktorju. Tako je npr. (k~a × ~b) · ~c =
k(~a×~b) · ~c.
2. Mesani produkt je distributiven v vsakem faktorju. Tako je npr. (~a×~b) · (~c +~d) = (~a×~b) · ~c + (~a×~b) · ~d.
3. Mesani produkt je 0, ce
a) je vsaj eden izmed faktorjev enak vektorju nic. V tem primeru imamo vdeteminanti eno vrstico samih nicel.
b) so vsi vektorji razlicni od nicelnega vektorja in so komplanarni. Veljatudi obratno: ce so vektorji komplanarni, tedaj je njihov mesani produktenak 0.
c) sta dva faktorja enaka. V determinanti sta v tem primeru dve vrsticienaki.
4. Ce zamenjamo dva faktorja, tedaj mesani produkt spremeni predznak. Npr.(~a×~b) · ~c = −(~c×~b) · ~a.
Zgled 39. Pokazimo, da so vektorji ~a = (1, 2, 1),~b = (2, 0,−1) in ~c = (0, 4, 3)komplanarni.
Mesani produkt vektorjev je dolocen z determinanto
(~a×~b) · ~c =
∣∣∣∣∣∣
1 2 12 0 −10 4 3
∣∣∣∣∣∣= 0,
kar implicira, da so vektorji komplanarni.

6.8. ENACBA PREMICE V PROSTORU 81
Slika 6.9: Enacba premice v prostoru.
6.8 Enacba premice v prostoru
Premica je v prostoru enolicno podana, ce poznamo eno tocko T0 = (x0, y0, z0) napremici in vektor ~e = (a, b, c), ki lezi na premici. Vektorju ~e pravimo smerni vektorpremice. Tedaj lahko poljubno drugo tocko T (x, y, z) na premici poiscemo s pomocjoenacbe
~r = ~r0 + t~e
oziroma(x, y, z) = (x0, y0, z0) + t(a, b, c).
Vektor ~r0 je krajevni vektor tocke T0 in t je poljubno stevilo iz mnozice realnihstevil. Tej enacbi recemo enacba premice v vektorski obliki. Ce desno stranzadnje enacbe preuredimo (vektor (a,b,c) pomnozimo s skalarjem in nato vektorjasestejemo), dobimo
(x, y, z) = (x0 + ta, y0 + tb, z0 + tc).
Ce primerjamo komponente, dobimo tri enacbe
x = x0 + aty = y0 + btz = z0 + ct
,
kar imenujemo tudi parametricna enacba premice. Ce iz teh treh enacb izrazimot, dobimo enacbo premice v kanonski obliki
x− x0
a=
y − y0
b=
z − z0
c.
Oglejmo si, kako izracunamo oddaljenost d tocke T1 = (x1, y1, z1) od premice, kije podana s tocko T0 = (x0, y0, z0) in vektorjem ~e = (a, b, c). Zapisimo vektor−−→T0T1 = (x1 − x0, y1 − y0, z1 − z0), ki skupaj z vektorjem ~e doloca paralelogram (glej
sliko 6.10). Ploscina paralelograma je enaka |−−→T0T1×~e|. Po drugi strani pa je ploscina
paralelograma d|~e| (osnovnica krat visina). Torej je |−−→T0T1 × ~e| = d|~e|, kar nam pada iskano formulo

82 POGLAVJE 6. VEKTORJI
Slika 6.10: Oddaljenost poljubne tocke od premice.
d = |−−−→T0T1×~e||~e| .
Zgled 40. Zapisimo enacbo premice, ki gre skozi tocki A(4,−1, 2) in B(1,−1, 1).Izracunajmo tudi razdaljo tocke C(1, 2, 3) od premice.
Najprej zapisimo vektor ~e =−→AB = (−3, 0,−1), ki lezi na premici skozi dani
tocki. Sedaj vzamemo eno izmed tock, mi bomo vzeli tocko A in zapisimo enacbopremice v vektorski obliki
(x, y, z) = (4,−1, 2) + t(−3, 0,−1).
Za izracun oddaljenosti potrebujemo vektor, ki ima zacetek v eni izmed tock, ki
lezi na premici in konec v tocki C. Vzemimo vektor−→AC = (−3, 3, 1). Izracunajmo
najprej
−→AC × ~e =
∣∣∣∣∣∣
i j k−3 3 1−3 0 −1
∣∣∣∣∣∣= (−3,−6, 9).
Oddaljenost nato izracunamo po formuli
d =|−→AC × ~e||~e| =
√9 + 36 + 81√9 + 0 + 1
=
√126√10
=
√63
5.
6.9 Enacba ravnine v prostoru
Ravnina je v prostoru enolicno podana, ce poznamo tocko T0 = (x0, y0, z0) na njej
in nenicelni vektor ~E = (A,B, C), ki je pravokoten na to ravnino, imenujemo ganormalni vektor ravnine. Vzemimo sedaj poljubno tocko T (x, y, z) v tej ravnini.
Vektor, ki sega od tocke T do tocke T0 je pravokoten na vektor ~E. Torej je skalarniprodukt
~E · −−→TT0

6.9. ENACBA RAVNINE V PROSTORU 83
Slika 6.11: Enacba ravnine v prostoru.
enak nic. Ce upostevamo, da ima vektor, ki povezuje tocki T in T0 koordinate
−−→TT0 = (x− x0, y − y0, z − z0)
je skalarni produkt
~E · −−→TT0 = A(x− x0) + B(y − y0) + C(z − z0) = 0.
To enacbo preuredimo in dobimo
Ax + By + Cz − ax0 −By0 − Cz0 = 0.
Ce zadnje tri clene, ki so brez neznank zdruzimo D = −(ax0 + By0 + Cz0), dobimokoncno obliko enacbe ravnine v prostoru
Ax + By + Cz + D = 0.
Dolzino vektorja ~E je| ~E| =
√A2 + B2 + C2.
Ce enacbo ravnine delimo z dolzino vektorja ~E dobimo
A√A2 + B2 + C2
x +B√
A2 + B2 + C2y +
C√A2 + B2 + C2
z +D√
A2 + B2 + C2= 0.
Oznacimo sedaj z
a =A√
A2 + B2 + C2,
b =B√
A2 + B2 + C2,
c =C√
A2 + B2 + C2

84 POGLAVJE 6. VEKTORJI
in
d =D√
A2 + B2 + C2.
Enacbo ravnine lahko v tem primeru pisemo kot
ax + by + cz + d = 0.
Dolzina vektorja ~e podanega s koordinatami
~e = (a, b, c)
je 1, zato imenujemo enacbo ax + by + cz + d = 0 tudi normirana oblika enacberavnine. Oglejmo si sedaj razdaljo neke poljubne tocke s koordinatami T1(x1, y1, z1)od ravnine podane z enacbo ax + by + cz + d = 0. Vzemimo vektor, ki gre od tockeT1(x1, y1, z1) do poljubne tocke na ravnini. Ce pomnozimo skalarno ta vektor z
vektorjem ~e je ta produkt enak pravokortni projekciji vektorja−−→T1T na vektor ~e. To
pa je oddaljenost tocke T1 od ravnine. Vektor−−→T1T ima koordinate
−−→T1T = (x1 − x, y1 − y, z1 − z).
Razdalja jep = a(x1 − x) + b(y1 − y) + c(z1 − z).
To enacbo lahko preoblikujemo in dobimo
p = ax1 + by1 + cz1 − ax− by − cz.
Nazadnje se upostevamo, da je −ax− by − cz = d, zato lahko zapisemo
p = ax1 + by1 + cz1 + d.
Izraz za p je pozitiven, ce je vektor ~e usmerjen iz ravnine na tisto stran, na kateri jetocka T1 in je negativen, ce gleda vektor ~e v nasprotno smer. V literaturi srecamotudi tole formulo
p = |Ax1 + By1 + Cz1 + D√A2 + B2 + C2
|,
ce nimamo normirane oblike enacbe ravnine. Oglejmo si se kot med dvema ravni-nama. Ti naj bosta dani v normirani obliki. Zato ju lahko zapisemo z enacbama
a1x + b1y + c1z + d1 = 0
ina2x + b2y + c2z + d2 = 0.

6.9. ENACBA RAVNINE V PROSTORU 85
Normalna vektorja obeh enacb imata torej koordinate
~e1 = (a1, b1, c1)
in
~e2 = (a2, b2, c2).
Kot med obema normalnima vektorjema je enak kotu, ki ga oklepata obe ravnini. Ceuporabimo izracun kota med dvema vektorjema nato s pomocjo skalarnega produktadobimo
cos ϕ =~e1 · ~e2
|~e1||~e2| = a1a2 + b1b2 + c1c2.
Pri tem smo upostevali, da je dolzina obeh vektorjev enaka 1. Ce ravnini nistazapisani v normirani obliki, izracunamo kot med vektorjema po formuli
cos ϕ =~E1 · ~E2
| ~E1|| ~E2|,
saj dolzina vektorja na velikost kota ne vpliva.
Zgled 41. Poiscimo ravnino, ki jo dolocajo tri nekolinearne tocke A1(1, 3, 0), B1(4,−1, 2)in C1(3, 0, 1).
Ce so tocke nekolinearne, tedaj je vektorski produkt−−−→A1B1 × −−−→A1C1 od ~0 razlicen
in na ravnino pravokoten, zato ga lahko vzamemo za normalni vektor ravnine
~E =−−−→A1B1 ×−−−→A1C1 =
∣∣∣∣∣∣
i j k3 −4 22 −3 1
∣∣∣∣∣∣= (2, 1,−1).
Za dolocitev enacbe potrebujemo se eno tocko na ravnini, mi bomo vzeli, kar tockoA1. Tedaj je enacba ravnine
~E · −−→TA1 = 2(x− 1) + 1(y − 3)− 1(z − 0) = 0.
Ce uredimo, dobimo
2x + y − z − 5 = 0.
Druga moznost pa je, da v formulo Ax + By + Cz + D = 0 vstavimo koordinatenormalnega vektorja ~E in eno izmed tock ravnine, naj bo to tocka A1, in dobimo2 · 1 + 1 · 3− 1 · 0 = D. Tedaj je D = 5, kar nam spet da iskano enacbo ravnine.

86 POGLAVJE 6. VEKTORJI
6.10 Naloge s postopki za resevanje
1. Dokazimo, da so vektorji ~a = (1, 0,−2), ~b = (−1, 3, 0) in ~c = (0,−2, 2) linearno
neodvisni. Nato pa vektor ~d = (3,−9, 2) zapisimo kot linearno kombinacijoteh vektorjev.
Resitev: Vektorji so linearno neodvisni, ce iz α1~a + α2~b + α3~c = ~0 sledi
α1 = α2 = α3 = 0. Ce zapisemo vsako komponento vektorja posebej dobimo
α1 − α2 + 0α3 = 00α1 + 3α2 − 2α3 = 0−2α1 + 0α2 + 2α3 = 0
.
Zapisimo matriko sistema in jo z elementarnimi transformacijami preoblikujmov zgornjetrikotno matriko:
1 −1 00 3 −2−2 0 2
≈
1 −1 00 3 −20 −2 2
≈
1 −1 00 3 −20 0 2
.
Rang osnovne matrike je 3, kar je enako stevilu neznank. Zato bomo imeli letrivialno resitev: α1 = α2 = α3 = 0. Naj bo sedaj ~d = α1~a + α2
~b + α3~c. Cezapisemo enacbo po komponentah, dobimo
α1 − α2 + 0α3 = 30α1 + 3α2 − 2α3 = −9−2α1 + 0α2 + 2α3 = 2
Zapisimo razsirjeno matriko sistema in jo z elementarnimi transformacijamipreoblikujmo v zgornjetrikotno matriko:
1 −1 0 | 30 3 −2 | −9−2 0 2 | 2
≈
1 −1 0 | 30 3 −2 | −90 −2 2 | 8
≈
1 −1 0 | 30 3 −2 | −90 0 2 | 6
.
Rang osnovne matrike je enak rangu razsirjene matrike (ranga sta 3) in enakstevilu neznank. Zato imamo eno samo resitev: α1 = 2, α2 = −1 in α3 = 3.Od tod dobimo
~d = 2~a−~b + 3~c.

6.10. NALOGE S POSTOPKI ZA RESEVANJE 87
2. Dolocimo x tako, da bosta vektorja ~a = (x, 2, 1) in ~b = (x2,−2, x) pravokotna.
Resitev: Vektorja sta pravokotna natanko tedaj, ko je njun skalarni produktenak nic. Dolociti moramo x tako, da bo ~a ·~b = 0. Kar nam da enacbo
x2
2+ x− 4 = 0.
Ce enacbo pomnozimo z 2 in razstavimo levo stran, dobimo resitvi x1 = −4in x2 = 2.
3. Preverimo, ce sta vektorja ~a = (1,−2, 1) in ~b = (−3, 6,−3) kolinearna.
Resitev: Izracunajmo njun vektorski produkt
~a×~b =
∣∣∣∣∣∣
i j k1 −2 1−3 6 −3
∣∣∣∣∣∣= (0, 0, 0).
Ker je njun vektorski produkt enak ~0, sta vektorja kolinearna.
4. Pokazimo, da tocke A(0,−1, 1), B(2, 1,−1), C(−2, 0, 0) in D(−4,−2, 2) lezijov isti ravnini.
Resitev: Ce dane tocke lezijo v isti ravnini, potem so vektorji−→AB = −→a =
(2, 2,−2),−→AC =
−→b = (−2, 1,−1) in
−−→AD = −→c = (−4,−1, 1) komplanarni.
Torej moramo pokazati, da je njihov mesani produkt enak 0:
(~a×~b) · ~c =
∣∣∣∣∣∣
2 2 −2−2 1 −1−4 −1 1
∣∣∣∣∣∣= 0.
S tem smo pokazali, da tocke lezijo v isti ravnini.
5. Poiscimo kot, ki ga oklepata premica p1 : x = 2t − 1, y = −2t + 1, z = t inpremica p2, ki poteka skozi koordinatno izhodisce in tocko A(1,−1,−1).
Resitev: Kot med premicama je kot med njunima smernima vektorjema.Zapisimo smerna vektorja obeh premic: ~s1 = (2,−2, 1) in ~s2 = (1,−1,−1).Izracunamo
cos ϕ = ~s1· ~s1
| ~s1|| ~s2| = (2,−2,1)·(1,−1,−1)√4+4+1
√1+1+1
= −13√
3.

88 POGLAVJE 6. VEKTORJI
Od tod je ϕ = 101o5′.
6. Dani sta premici z enacbama ~r = (−3, 3, 3) + t(−2, 2, 1) in ~r = (−2, 0,−1) +s(3,−1, 2). Izracunajmo presecisce premic.
Resitev: Poiskali bomo koordinato tocke, ki lezi na obeh premicah. Lahko bise zgodilo, da sta premici vzporedni ali pa lezita v vzporednih ravninah, v tehdveh primerih presecisce ne obstaja. Iz parametricnih enacb zapisemo sistemdveh enacb z dvema neznankama. Imamo tri moznosti, izberimo
−3− 2t = −2 + 3s,3 + 2t = −s.
Ce enacbi sestejemo, dobimo 2s− 2 = 0. Od tod je s = 1. Nato iz ene izmedenacb izracunamo t = −2. Nazadnje se preverimo, ce se koordinate obeh tockujemajo. Presecisce je tocka P (1,−1, 1).
7. Poiscimo oddaljenost tocke T (−3, 1, 2) od ravnine 2x− y + 2z − 4 = 0.
Resitev: Najprej izracunamo dolzino normalnega vektorja ~E = (2,−1, 2)
| ~E| = √4 + 1 + 4 = 3.
Enotski normalni vektor ~e = (23, −1
3, 2
3) in d = D√
A2+B2+C2 = −43, kar vstavimo
v formulo p = ax1 + by1 + cz1 + d = 23(−3) + (−1
3)(1) + 2
3(2)− 4
3= −7
3. Ker je
p negativen, je potrebno vzeti njegovo absolutno vrednost, torej razdalja je 73.
8. Dana je premica p : x = 2t−1, y = t+2, z = 1− t, ravnina π : 3x−2y + z = 3in tocka T1(−1, 2,−3).
a) Napisimo enacbo ravnine, ki poteka skozi tocko T1 premico p.
b) Poiscimo presecisce premice p z ravnino π.
Resitev: Vektor ~s = (2, 1,−1) je vektor na premici. Za t = 0 dobimo izenacbe premice tocko T2(−1, 2, 1), ki seveda lezi na premici. Ocitno je, da
vektor−−→T1T2 = (0, 0, 4) lezi v ravnini. Vektor
~s×−−→T1T2 =
∣∣∣∣∣∣
i j k2 1 −10 0 4
∣∣∣∣∣∣= (4,−8, 0)

6.10. NALOGE S POSTOPKI ZA RESEVANJE 89
je normalni vektor ravnine. Enacba ravnine je ~E ·−−→TT1 = 4(x+1)−8(y−2) = 0ali x− 2y + 5 = 0.
Iz enacbe3(2t− 1)− 2(t + 2) + 1− t = 3
izracunamo t = 3. Presecisce je tocka P (5, 5,−2).
9. Zapisimo enacbo ravnine skozi paralelni premici x−11
= y+1−2
= z−23
in x1
=y+1−2
= z−13
.
Resitev: Iz x−11
= y+1−2
= z−23
= t dobimo neko tocko na premici, ce parametrut izberemo neko vrednost iz mnozice realnih stevil. Naj bo t = 0, tedaj jeT1(1,−1, 2) tocka na prvi premici. Na enak nacin dobimo tocko T2(0,−1, 1)
na drugi premici. Vektorja ~s = (1,−2, 3) in−−→T1T2 = (−1, 0,−1) lezita na
ravnini in nista kolinearna, zato je
~s×−−→T1T2 =
∣∣∣∣∣∣
i j k1 −2 3−1 0 −1
∣∣∣∣∣∣= (2,−2,−2)
normalni vektor iskane ravnine. Enacba ravnine je
2(x− 0)− 2(y + 1)− 2(z − 1) = 0
alix− y − z = 0.

90 POGLAVJE 6. VEKTORJI

Del II
Osnove matematicne analize
91

Poglavje 7
Procentni racun
7.1 Procentni in sklepni racun
Tovarna nacrtuje, da bo letos naredila 40000 parov obutve vec kot lani. Ta podateknam sam v resnici ne pove veliko. Ce je tovarna lani naredila 10000 parov obutve,potem letos nacrtuje izredno veliko povecanje proizvodnje. Ce pa je tovarna laninaredila 250000 parov obutve, pa nacrtuje precej manjse povecanje proizvodnje.Pomemben podatek je torej, koliksna je bila proizvodnja lani, da lahko izracunamovelikost povecanja. Podatek od lani imenujemo osnova (o), kolicino povecanja padelez (d). Kvocient med delezem in osnovo imenujemo relativni delez (r):
r =d
o,
r =40000
250000=
4
25.
Relativni delez obicajno izrazamo v odstotkih oz. procentih (p%):
4
25=
16
100= 0, 16 = 16%.
Splosen obrazec za izracun procentov p% je:
p% =d
o· 100.
Sedaj se lahko vprasamo, koliko odstotno povecanje nacrtuje tovarna, ce je laninaredila 250000 parov obutve.
1. nacin
p% =40000
250000· 100 = 16%
93

94 POGLAVJE 7. PROCENTNI RACUN
Nacrtuje 16 % povecanje proizvodnje.
2. nacinLahko nastavimo tudi sklepni racun, pri cemer 250000 parov obutve predstavlja100 %, 40000 parov obutve pa nam predstavlja iskano stevilo procentov, torej x %.
250000 ...... 100%40000 ...... x%
x = 40000·100250000
= 16
Nekatere probleme je preprosteje resiti s sklepnim racunom, pri nekaterih prob-lemih pa se lahko s sklepnimi racuni zelo zapletemo. Obicajno nalog, kjer gre za veczaporednih podrazitev in pocenitev, ne resujemo s sklepnimi racuni (Glej naloge spostopki za resevanje).
Razmislimo sedaj se nekaj. V letosnjem letu bo tovarna torej naredila 290000parov obutve. Naslednje leto pa nacrtuje 40000 parov obutve manj. Za koliko pro-centov bo zmanjsala proizvodnjo?
Izberemo enega od zgornjih nacinov:
p% =40000
290000· 100 ∼= 13, 8.
Tovarna torej nacrtuje 13, 8 % zmanjsanje proizvodnje.
Ceprav smo najprej povecali nato pa zmanjsali proizvodnjo za isti delez, se je os-nova spremenila in smo dobili razlicna odstotka. Pri izbiri osnove moramo biti zatopazljivi.
Kadar nas zanima, koliksen delez predstavlja p% od neke osnove o, je izracun:
d =p
100· o.
Zgled 42. Koliko je 15% od 700?Odstotke izrazimo s stotiskim ulomkom, od pa nadomestimo z mnozenjem:
15% od 700 =15
100· 700 = 105.

7.2. NALOGE S POSTOPKI ZA RESEVANJE 95
Ce nam je blizji decimalni zapis pa:
15% od 700 = 0, 15 · 700 = 105.
7.2 Naloge s postopki za resevanje
1. Ceno nekega izdelka smo povecali za 20 % nato pa zmanjsali za 12 %. Razlikamed zadnjo in prvo ceno je 504 EUR. Izracunajte vse tri cene, po katerih smoizdelke prodajali.
Resitev: Ce je prva cena (c1) nasa osnova, potem prvo ceno obravnavamo kot100%. Druga cena (c2) je za 20 % vecja od c1, torej predstavlja 120 % od c1.Torej:
c2 =120
100· c1.
Tretja cena c3 je za 12 % zmanjsana druga cena c2. Sedaj nam osnovo 100 %predstavlja c2, c3 pa je 88 % od c2. Nato upostevamo se, kako je c2 izrazen sc1:
c3 =88
100· c2 =
88
100· 120
100· c1 =
132
125· c1.
Tako smo drugo in tretjo ceno izrazili s c1. Vemo se, da je razlika med zadnjoin prvo ceno 504 EUR. Torej
c3 − c1 = 504.
Ce za c3 vstavimo izraz, kako se c3 izraza s c1 dobimo enacbo z eno neznanko.Izracunajmo sedaj vse tri cene:
132
125· c1 − c1 = 504
7
125· c1 = 504
c1 = 9000 EUR
c2 =120
100· c1 =
120
100· 9000 = 10800 EUR
c3 =132
125· c1 =
132
125· 9000 = 9504 EUR
Cene po vrsti so: 9000 EUR, 10800 EUR in 9504 EUR.

96 POGLAVJE 7. PROCENTNI RACUN
2. Cena novega traktorja skupaj z 20 % davkom je 11820 EUR. Koliko stanetraktor s 5 % davkom?
Resitev: Cena traktorja je nasa osnova in predstavlja 100 %. Cena traktorjaz 20 % davkom torej predstavlja 120 %. Cena traktorja s 5 % davkom pa105 %. Torej lahko nastavimo sklepni racun:
11820 ...... 120%x ...... 105%
x = 105·11820120
= 10342, 50 EUR
Cena traktorja s 5 % davkom znasa 10342, 50 EUR.

Poglavje 8
Raztopine
8.1 Mesanje raztopin
Raztopina je trdna, tekoca ali plinasta homogena zmes topljenca in topila. Masaraztopine mr je vsota mase topljenca in mase topila.
mr = m(topljenec) + m(topilo)
Koncentracijo topljenca v raztopini najveckrat izrazamo s procenti. Na primer 20 %raztopina natrijevega klorida pomeni, da 20 % mase celotne raztopine predstavljanatrijev klorid (topljenec), ostalo pa voda (topilo).Ta procent predstavlja razmerje med maso topljenca in maso raztopine. Imenujemoga masni delez topljenca in oznacimo z ω.
ω =m(topljenec)
mr
Koncentracijo raztopine sicer lahko izrazimo tudi z mnozinsko koncentracijoc, ki je razmerje med mnozino topljenca n in volumnom raztopine
c =n(topljenec)
V (raztopina),
ali z masno koncentracijo γ, ki je razmerje med maso topljenca in volumnomraztopine
γ =m(topljenca)
V (raztopine).
Raztopine nastanejo tudi z mesanjem, redcenjem ali koncentriranjem raztopin.Naj bosta m1 in V1 masa in volumen prve raztopine, m2 in V2 masa in volumen
97

98 POGLAVJE 8. RAZTOPINE
druge raztopine, ko ju zmesamo, pa dobimo raztopino z maso m3 in volumnom V3.Velja, da se mase raztopin ohranjajo
m1 + m2 = m3,
volumni pa neV1 + V2 6= V3.
Raztopine z zelo majhno koncentracijo lahko vcasih zaradi lazjega racunanja obrav-navamo, kot da ohranjajo tudi volumen, saj pri majhnih koncentracijah, ne dobimovelikih napak.
Ohranjajo se tudi mase topljenca:
m(topljenec 1) + m(topljenec 2) = m(topljenec 3)
in mnozine topljenca:
n(topljenec 1) + n(topljenec 2) = n(topljenec 3).
Ce poznamo masni delez ω in maso raztopine mr, potem lahko izracunamo masotopljenca kot njun produkt:
m(topljenca) = ω ·mr,
saj je ω ·mr = m(topljenec)mr
·mr = m(topljenec).
Ce poznamo mnozinsko koncentracijo c in volumen V raztopine, potem lahko mnozinotopljenca dobimo, kot njun produkt
n(topljenca) = c · V,
saj je c · V = n(topljenec)V (raztopina)
· V = n(topljenec).
Ker se pri mesanju raztopin ohranjajo tako mase kot mnozine topljenca, dobimodve pomembni formuli:
ω1 ·m1 + ω2 ·m2 = ω3 ·m3,
c1 · V1 + c2 · V2 = c3 · V3.
Formuli lahko v primeru mesanja vec raztopin tudi posplosimo:
ω1 ·m1 + ω2 ·m2 + . . . + ωn ·mn = ω ·m,
c1 · V1 + c2 · V2 . . . cn · Vn = c · V.

8.2. NALOGE S POSTOPKI ZA RESEVANJE 99
Podobni formuli dobimo pri redcenju in koncentriranju raztopin. Pri redcenjutopilo dodajamo pri koncentriranju pa topilo odvzemamo (hlapimo). Na zacetkuimamo torej raztopino z m1, V1, ω1 in c1 po redcenju oz. koncetriranju pa raztopinoz m2, V2, ω2 in c2. Masa in mnozina topljenca se ohranja, zato velja:
ω1 ·m1 = ω2 ·m2,
c1 · V1 = c2 · V2.
8.2 Naloge s postopki za resevanje
1. Na razpolago imamo 2 % in 5 % raztopino. V kaksnem razmerju ju moramomesati, da dobimo 4 % raztopino?
Resitev: Podatki:ω1 = 2ω2 = 5ω3 = 4Iscemo razmerje: m1
m2=?
Vemo: m1 + m2 = m3 in ω1m1 + ω2m2 = ω3m3,torej: ω1m1 + ω2m2 = ω3(m1 + m2).Znebimo se oklepaja:
ω1m1 + ω2m2 = ω3m1 + ω3m2.
Clena, ki vsebujeta m1, postavimo na levo stran enacaja, clena, ki vsebujetam2, pa na desno stran enacaja:
ω1m1 − ω3m1 = ω3m2 − ω2m2.
Izpostavimo:m1(ω1 − ω3) = m2(ω3 − ω2).
Celo enacbo delimo z m2(ω1 − ω3) in dobimo obrazec, za razmerje mesanjaraztopin pri znanih masnih delezih:
m1
m2
=(ω3 − ω2)
(ω1 − ω3).
Vstavimo znane kolicine in izracunajmo:
m1
m2
=4− 5
2− 4=
1
2.

100 POGLAVJE 8. RAZTOPINE
Raztopini moramo mesati v razmerju 1 : 2.
Obrazec za razmerje mesanja dveh raztopin, da dobimo raztopino z zelenimmasnim delezem
m1
m2
=(ω3 − ω2)
(ω1 − ω3)
si lahko zapomnimo, lahko ga izpeljemo, lahko pa si ga zapomnimo kot nekevrste krizni racun:
za etna masna dele ač ž kon ni masni deleč ž razmerje mešanja
2
5
42
1
24
45=
-
-
2. Zmesali smo dva dela 5 % in tri dele 8 % raztopine soli. Koliksna bo koncen-tracija mesanice, ko bo iz nje izhlapela cetrtina vode.
Resitev: Najprej izracunamo, kaksna je koncentracija raztopine, ko smozmesali dva dela 5% in tri dele 8% soli. To lahko naredimo na dva nacina:1.nacin Po formuli: ω1 ·m1 + ω2 ·m2 = ω3 ·m3. Vstavimo podatke v enacbo:5 · 2 + 8 · 3 = x · 5. Imamo 2 dela prve soli in 3 dele druge soli, zato recemo,da je masa prve raztopine 2 in masa druge raztopine 3. Masa mesanice pa jepotemtakem 5. Iz enacbe izracunamo x = 34
5.
2. nacin Nastavimo”krizno razmerje”opisano v prejsnji nalogi.
za etna masna dele ač ž kon ni masni deleč ž razmerje mešanja
5
8
x
3
2
5
8=
-
-
x
x
Resimo enacbo in dobimo: x = 345.
Torej smo dobili 6, 8 koncentracijo raztopine. Sedaj moramo se cetrtino vodeizpariti. Zopet upostevamo dejstvo, da je produkt masnega deleza topljenca inmase raztopine na zacetku enak produktu masnega deleza topljenca in maseraztopine na koncu:
ω1 ·m1 = ω2 ·m2.
Ker nas mase v resnici ne zanimajo, lahko recemo, da je masa na zacetkum1 = 100 g, od tega je 6, 8 g soli in 93, 2 g vode. Ko izparimo 1
4vode, nam
ostane 69, 9 g vode. Dobimo
6, 8 · 100 = ω2 · 76, 7,

8.2. NALOGE S POSTOPKI ZA RESEVANJE 101
torej koncentracija mesanice bo 8, 88%.

102 POGLAVJE 8. RAZTOPINE

Poglavje 9
Zaporedja
9.1 Definicija in osnovne lastnosti
Zaporedje je funkcija a, ki vsakemu naravnemu stevilu priredi neko realno stevilo
a : N −→ R,
a(n) = an.
Zaporedne funkcijske vrednosti a1, a2, a3, . . . , an, . . . imenujemo cleni zaporedja,an pa splosni clen.
Zaporedje lahko podamo na tri nacine.
1. Nastejemo vse clene zaporedja: (a1, a2, a3, . . . , an, . . .) (zgled 43).
2. Podamo splosni clen zaporedja an (zgled 44). Zaporedje podano s splosnimclenom navadno oznacimo: {an}n∈N.
3. Zaporedje podamo rekurzivno, to pomeni, da podamo zadostno stevilo prvihclenov, splosni clen pa izrazimo s prejsnjimi cleni (zgled 45).
Zgled 43. Podano je zaporedje (1, 3, 5, 7, . . .).Iz zgornjega zapisa razberemo, da je a1 = 1, a2 = 3, a3 = 5, a4 = 7. Z malorazmisleka lahko zapisemo splosni clen zaporedja an = 2n− 1.
Zgled 44. Zaporedje je podano s splosnim clenom an = 3n + 1. Zapisimo prve triclene zaporedja in 11. clen.
Clene zaporedja poiscemo tako, da namesto n vstavljamo naravna stevila.Prvi clen: a1 = 3 · 1 + 1 = 4.Drugi clen: a2 = 3 · 2 + 1 = 7.Tretji clen: a3 = 3 · 3 + 1 = 10.
103

104 POGLAVJE 9. ZAPOREDJA
. . .Enajsti clen: a11 = 3 · 11 + 1 = 34.
Zgled 45. Zapisi prvih sedem clenov rekurzivno podanega zaporedja: a1 = 1, a2 = 1in an = an−2 + an−1.
Prvi clen: a1 = 1.Drugi clen: a2 = 1.Tretji clen: a3 = a1 + a2 = 1 + 1 = 2.V rekurzivno formulo za splosni clen najprej vstavimo 3, nato pa upostevamo vred-nosti za a1 in a2 in izracunamo.Cetrti clen: a4 = a2 + a3 = 1 + 2 = 3.Peti clen: a5 = a3 + a4 = 2 + 3 = 5.Sesti clen: a6 = a4 + a5 = 3 + 5 = 8.Sedmi clen: a7 = a5 + a6 = 5 + 8 = 13.
Pri rekurzivno podanih zaporedji lahko clene racunamo le po vrsti.
Zaporedje iz zgleda 45 je znano Fibonaccijevo zaporedje in se imenuje po LeonarduFibonacciju, sinu italijanskega trgovca iz 12. stoletja. To zaporedje se velikokratpojavlja v naravi. Poglejmo si cebele. Pri cebelah ima samec - trot, v nasprotju scebelami, le mater, saj se razvije iz neoplojenega jajceca. Prestejmo, koliko pred-nikov ima trot po generacijah. Naj bo prva generacija trot a1 = 1. Druga generacijaje njegova mati - matica a2 = 1. Tretja generacija so trotovi stari starsi, oce in matiod njegove matere a3 = 2 . Cetrta generacija so trotovi prastarsi, njegov stari oce- je trot, zato ima samo mamo, njegova stara mati pa ima oba, torej a4 = 3. Cebi razmisljali in sestevali se naprej bi videli, da ima trot v n-ti generaciji ravno an
prednikov, kjer je an n-ti clen Fibonaccijevega zaporedja.Tudi stevilo cvetnih in vencnih listov ter prasnikov in semen cvetlic pogosto ses-
tavljajo tako zaporedje, prav tako poganjki na steblu in luske v zaporednih vencihsmrekovega storza.
Podzaporedje zaporedja {an}n∈N je sestavljeno iz nekaterih clenov zaporedja{an}n∈N.
Zgled 46. Naj bo podano zaporedje naravnih stevil: (1, 2, 3, 4, 5, 6, 7, 8, . . .).Potem je zaporedje sodih stevil njegovo podzaporedje: (2, 4, 6, 8, . . .).
Zaporedje je narascajoce, ce je vsak naslednji clen vecji ali enak prejsnjemu:an+1 ≥ an, za vsak n ∈ N.Zaporedje je strogo narascajoce, ce je vsak naslednji clen strogo vecji od presnjega:an+1 > an, za vsak n ∈ N.Zaporedje je padajoce, ce je vsak naslednji clen manjsi ali enak prejsnjemu:

9.1. DEFINICIJA IN OSNOVNE LASTNOSTI 105
an+1 ≤ an, za vsak n ∈ N.Zaporedje je strogo padajoce, ce je vsak naslednji clen strogo manjsi od prejsnjega:an+1 < an, za vsak n ∈ N.Zaporedje je monotono, ce je narascajoce ali padajoce.Zaporedje, ki z vsakim naslednjim clenom zamenja predznak, imenujemo alterni-rajoce zaporedje.
Zgled 47. Narascajoce zaporedje: (−1,−1, 1, 1, 3, 3, 5, 5, . . .).Strogo narascajoce zaporedje: (−1, 1, 3, 5, . . .).Padajoce zaporedje: (1, 1, 1
2, 1
2, 1
3, 1
3, . . .).
Strogo padajoce zaporedje: (1, 12, 1
3, . . .).
Alternirajoce zaporedje: (1,−1, 2,−2, 3,−3, . . .).
Zaporedje {an}n∈N je navzgor omejeno, kadar obstaja tako stevilo M ∈ R, daso vsi cleni zaporedja manjsi ali enaki od M . Stevilo M imenujemo zgornja mejazaporedja. Najmanjso izmed zgornjih mej imenujemo natancna zgornja meja.Kar z matematicnimi simboli zapisemo
an ≤ M, ∀n ∈ N.
Zaporedje {an}n∈N je navzdol omejeno, kadar obstaja tako stevilo m ∈ R, daso vsi cleni zaporedja manjsi ali enaki od m. Stevilo m imenujemo spodnja mejazaporedja. Najvecjo izmed spodnjih mej imenujemo natancna spodnja meja.Krajse to zapisemo
an ≥ m, ∀n ∈ N.
Zaporedje je omejeno, ce je navzgor in navzdol omejeno.
Zgled 48. Dano je zaporedje s splosnim clenom an = 1n. Ali je zaporedje omejeno?
Izracunajmo prvih nekaj clenov: {an}n∈N = (1, 12, 1
3, 1
4, . . .).
Ali je zaporedje navzgor omejeno?Vsi cleni zaporedja so gotovo manjsi od 1: 1
n≤ 1, ∀n ∈ N, torej je 1 zgornja
meja zaporedja. Vidimo, da ima zaporedje neskoncno zgornjih mej, saj so vsi clenizaporedja manjsi tudi od 3, 7
2, 15, itd. Ker je zaporedje ocitno padajoce, so vsi cleni
gotovo manjsi ali enaki prvemu clenu, zato je natancna zgornja meja kar prvi clenzaporedja, to je stevilo M = 1.
Ali je zaporedje navzdol omejeno?Vsi cleni zaporedja so gotovo vecji od 0 (ker je n ∈ N): 1
n≥ 0, ∀n ∈ N, torej je 0
spodnja meja zaporedja. Zaporedje ima tudi neskoncno stevilo spodnjih mej, saj sovsa negativna realna stevila spodnje meje zaporedja. O natancni spodnji meji tegazaporedja bomo lahko govorili, ko bomo spoznali pojem limite zaporedja.
Ker je zaporedje navzgor in navzdol omejeno, je omejeno.

106 POGLAVJE 9. ZAPOREDJA
9.2 Aritmeticno zaporedje
Zaporedje je aritmeticno, ce je razlika sosednjih clenov konstantna. Razliko oznacimoz d in jo imenujemo diferenca. Pravkar povedano, zapisimo se z matematicnimisimboli
an+1 − an = d, ∀n ∈ N.
Vsak clen aritmeticnega zaporedje lahko dobimo tako, da predhodniku pristejemod:
an+1 = an + d.
Za splosni clen aritmeticnega zaporedja an lahko izpeljemo uporaben obrazec:
an = an−1 +d == (an−2 + d) +d == an−2 +2d = . . . == a2 +(n− 2)d == a1 +(n− 1)d
Izpeljali smo:
an = a1 + (n− 1)d.
Naj bodo an−1, an in an+1 trije zaporedni cleni aritmeticnega zaporedja. Potemje an aritmeticna sredina sosednjih clenov:
an =an−1 + an+1
2.
Vsoto prvih n clenov aritmeticnega zaporedja imenujemo n-ta delna vsotaaritmeticnega zaporedja in jo oznacimo z
sn =n∑
j=1
an = a1 + a2 + a3 + . . . + an.
Izkaze se, da jo lahko izracunamo po eni izmed naslednjih dveh formul:
sn = n · a1 + an
2
ali
sn =n
2· (2a1 + (n− 1)d).

9.3. GEOMETRIJSKO ZAPOREDJE 107
Zgled 49. Izracunajmo vsoto prvih n naravnih stevil?Zaporedje naravnih stevil je aritmeticno zaporedje z diferenco d = 1, prvim clenoma1 = 1 in splosnim clenom an = n. Zato je vsota prvih n naravnih stevil enaka:
n∑j=1
j = 1 + 2 + 3 + . . . + n = n · 1 + n
2.
Vsota prvih 100 naravnih stevil je: 1 + 2 + 3 + . . . + 100 = 100 · 1+1002
= 5050.
9.3 Geometrijsko zaporedje
Zaporedje je geometrijsko, ce je kolicnik sosednjih clenov konstanten. Kolicnikoznacimo s q. Zapisimo se s simboli
an+1
an
= q, ∀n ∈ N.
Vsak clen geometrijskega zaporedja lahko dobimo tako, da predhodnika pomnozimos q:
an+1 = an · q.Za splosni clen geometrijskega zaporedja lahko izpeljemo obrazec:
an = an−1· q == (an−2q)· q == an−2· q2 = . . . == a2· qn−2 == a1· qn−1
Izpeljali smo
an = a1 · qn−1.
Naj bodo an−1, an in an+1 trije pozitivni zaporedni cleni geometrijskega za-poredja. Potem je an geometrijska sredina sosednjih clenov
an =√
an−1 · an+1.
Vsota prvih n clenov geometrijskega zaporedja (n-to delno vsoto) izracunamotako:
sn =a1(q
n − 1)
q − 1.

108 POGLAVJE 9. ZAPOREDJA
Zgled 50. Poiscimo splosni clen in kolicnik q geometrijskega zaporedja: (1, 12, 1
4, 1
8. . .).
Izracunajmo se vsoto prvih 10 clenov zaporedja.
q =a2
a1
=12
1=
1
2
an = a1 · qn−1 = 1 · 2n−1 = 2n−1
s10 =a1(q
n − 1)
q − 1=
1 · ((12)10 − 1)
12− 1
=−1023
1024
−12
=2046
1024=
1023
512
Oglejmo si primer uporabe geometrijskega zaporedja. Obrestno obrestovanjeje obrestovanje, pri katerem se v vsakem naslednjem obrestovalnem obdobju obrestujezacetni kapital z obrestmi. Na banko vlozimo kapital A, ki se obrestuje po obrestnemobrestovanju in letni obrestni meri p%. Zanima nas, koliko bo znasal nas kapital pon letih.Po enem letu: A1 = A + p
100A = A(1 + p
100).
Po dveh letih: A2 = A1 + p100
A1 = A1(1 + p100
) = A(1 + p100
)(1 + p100
) = A(1 + p100
)2.Po n letih: An = A(1 + p
100)n.
Vrednost kapitala po n letih, je torej An = A(1 + p100
)n, to pa je ravno splosniclen geometrijskega zaporedja z zacetnim clenom A in kolicnikom q = 1 + p
100.
Zgled 51. V zacetku leta 2009 smo v banko vlozili kapital 20.000 EUR. Koliksnabodo privarcevana sredstva ob koncu leta 2013, ce se obresti pripisujejo vsako leto(letna kapitalizacija) po 3, 75% obrestni meri?
Najprej premislimo, koliko let bo nas kapital na banki: n = 5.Iscemo A5 = A(1 + p
100)5.
Torej
A5 = 20000(1 +3, 75
100)5 ∼= 24042 EUR.
9.4 Stekalisca in limita
9.4.1 ε - okolica tocke a
Naj bo ε > 0 pozitivno realno stevilo in a neko realno stevilo, potem je ε-okolicatocke a odprt interval (a− ε, a + ε). Interval (a− ε, a + ε) lahko zapisemo tudi kotmnozico {x ∈ R; |a − x| < ε}. Absolutna vrednost razlike med dvema tockamapredstavlja razdaljo med tema tockama. V ε-okolici tocke a so vse take tocke x, daje razdalja med a in x manjsa od ε(Slika 9.1.).

9.4. STEKALISCA IN LIMITA 109
0 1R
e-a a e+a
Slika 9.1: Okolica tocke.
9.4.2 Stekalisce zaporedja
Stevilo s je stekalisce zaporedja {an}n∈N, ce je v vsaki ε-okolici tocke s neskoncnoclenov zaporedja (zunaj te okolice pa jih je lahko koncno ali neskoncno mnogo).
Zgled 52. Zaporedje (−1, 1,−12, 1,−1
4, 1,−1
8, 1, . . .) ima dve stekalisci. Stevilo 1 je
stekalisce zaporedja, ce vzamemo se tako majhen ε, bo na intervalu (1 − ε, 1 + ε)neskoncno mnogo clenov zaporedja (vsak sodi clen je 1).Stevilo 0 je tudi stekalisce, saj so lihi cleni zaporedja vse blize stevilu 0. Ce vzamemozelo majhno okolico stevila 0, bo v njej gotovo lezalo neskoncno clenov zaporedja.Glej sliko 9.2.
0-1R
e-1e-0 e+0
e+11
na
21
a 3a
5a
7a ...
Slika 9.2: Stekalisce zaporedja.
Za vsa zaporedja velja tako imenovani Bolzano Weierstrassov izrek, ki pravi,da ima vsako omejeno zaporedje vsaj eno stekalisce.
Zgled 53. Zaporedje iz zgleda 52 je omejeno in ima dve stekalisci.
9.4.3 Limita zaporedja
Stevilo a je limita zaporedja {an}n∈N, ce poljubna ε-okolica tocke a vsebujeneskoncno mnogo clenov zaporedja, izven te okolice pa lezi le koncno mnogo clenov.Limito zaporedja oznacimo z
a = limn→∞
an.
Zaporedje ima lahko kvecjemu eno limito a, ki je tudi edino stekalisce zaporedja.Takemu zaporedju recemo konvergentno zaporedje in recemo tudi, da zaporedjekonvergira k stevilu a. Zaporedje, ki nima limite je divergentno zaporedje. Ceima zaporedje limito a, potem v vsaki okolici limite a lezijo vsi cleni zaporedja od

110 POGLAVJE 9. ZAPOREDJA
dolocenega clena dalje, zato se z matematicnimi znaki definicija limite zaporedjazapise takole:
a = limn→∞
an ⇔ ∀ε > 0, obstaja tak N ∈ N, da ∀ n > N velja : |a− an| < ε.
Veljajo naslednje trditve:
1. ce je zaporedje narascajoce in navzgor omejeno, je konvergentno;
2. ce je zaporedje padajoce in navzdol omejeno, je konvergentno;
3. zaporedje je konvergentno natanko takrat, ko je omejeno in ima eno samostekalisce (limito).
Zgled 54. Zaporedje s splosnim clenom: an = 1n
konvergira k stevilu a = 0.Nekaj prvih clenov zaporedja: {an}n∈N = (1, 1
2, 1
3, 1
4, . . .). Torej
limn→∞
1
n= 0.
Prav tako konvergirajo k stevilu a = 0 zaporedja s splosnim clenom an = 1nk , kjer
je k poljubno realno stevilo vecje od 1. Velja
limn→∞
1
nk= 0, k ≥ 0.
Zgled 55. Zaporedje s splosnim clenom an = (1 + 1n)n konvergira k stevilu e.
Prvi clen: a1 = (1 + 11)1 = 2
Drugi clen: a2 = (1 + 12)2 = 2, 25
Tretji clen: a3 = (1 + 13)3 = 2, 37
itd.Izkaze se:
limn→∞
(1 +1
n)n = e,
kar nam bo v pomoc pri racunanju nekaterih limit zaporedij.
Lastnosti konvergentnih zaporedij
Naj bosta zaporedji {an}n∈N in {bn}n∈N konvergentni z limitama limn→∞
an = a in
limn→∞
bn = b, potem veljajo spodnje lastnosti.

9.5. NALOGE S POSTOPKI ZA RESEVANJE 111
1. Ce zaporedju {an}n∈N dodamo ali odvzamemo koncno mnogo clenov, novozaporedje spet konvergira k a.
2. Vsako neskoncno podzaporedje zaporedja {an}n∈N konvergira k a.
3. limn→∞
kan = k · limn→∞
an = k · a.
4. limn→∞
1an
= 1lim
n→∞an= 1
a, ce je vsak an 6= 0 in a 6= 0.
5. limn→∞
(an ± bn) = limn→∞
an ± limn→∞
bn = a± b.
6. limn→∞
(an · bn) = limn→∞
an · limn→∞
bn = a · b.
7. limn→∞
an
bn=
limn→∞an
limn→∞bn
= ab, ce je vsak bn 6= 0 in b 6= 0.
8. limn→∞
r√
an = r
√lim
n→∞an.
9.5 Naloge s postopki za resevanje
1. Podano je zaporedje {2n− 7}n∈N = (−5,−3,−1, 1, 3, 5, . . .). Ali je monotono?
Resitev: Sumimo da je narascajoce. Preveriti moramo, da je vsak naslednjiclen vecji od prejsnjega. Ker je clenov neskoncno, ne moremo preveriti vsakegaposebej. Zato preverimo, ali neenakost an+1 ≥ an velja za vsako naravnostevilo n:
an+1 ≥ an
2(n + 1)− 7 ≥ 2n− 72n + 2− 7 ≥ 2n− 7−5 ≥ −7
Zadnja neenakost res velja za vsak n, saj od n-ja niti ni odvisna. Torej zavsak n ∈ N velja tudi an+1 ≥ an, zato je zaporedje zares narascajoce, torej jemonotono.
2. Izracunajmo limito zaporedja s splosnim clenom an = 2n2+n+23n2+1
.
Resitev: Splosni clen najprej preoblikujemo tako, da stevec in imenovalecdelimo z nk, kjer je k najvisja potenca, ki nastopa v zapisu splosnega clena.Dobimo
limn→∞
2n2 + n + 2
3n2 + 1= lim
n→∞(2n2 + n + 2)/n2
(3n2 + 1)/n2=

112 POGLAVJE 9. ZAPOREDJA
limn→∞
2n2
n2 + nn2 + 2
n2
3n2
n2 + 1n2
= limn→∞
2 + 1n
+ 2n2
3 + 1n2
.
Sedaj uporabimo lastnosti za limito zaporedja in upostevamo, da je limn→∞
1nk =
0, ∀k > 0 (zgled 54):
limn→∞
2 + 1n
+ 2n2
3 + 1n2
=lim
n→∞2 + lim
n→∞1n
+ limn→∞
2n2
limn→∞
3 + limn→∞
1n2
=2 + 0 + 0
3 + 0=
2
3.
Izracunali smo, da je dano zaporedje konvergentno z limito 23.
3. Izracunajmo limito zaporedja s splosnim clenom an =√
n3+1+n√4n3+n
.
Resitev: Kot v prejsnjem primeru najprej preoblikujemo splosni clen. Stevecin imenovalec delimo z n
32 , saj je to najvisja potenca, ki v izrazu nastopa.
Upostevamo, da je n32 =
√n3. Torej
limn→∞
√n3 + 1 + n√4n3 + n
= limn→∞
(√
n3 + 1 + n)/n32√
(4n3 + n)/n32
=
= limn→∞
√n3
n3 + 1n3 + n
n32√
(4n3
n3 + nn3 )
= limn→∞
(√
1 + 1n3 + 1
n12√
4 + 1n2
=
=
√lim
n→∞1 + lim
n→∞1n3 + lim
n→∞1
n12√
limn→∞
4 + limn→∞
1n2
=
√1 + 0 + 0√
4 + 0=
1
2.
4. Izracunajmo limito zaporedja s splosnim clenom an =√
n + 2−√n.
Resitev: Kadar iscemo limito razlike korenov, si najprej izraz predstavljamov obliki ulomka, nato pa stevec in imenovalec pomnozimo z vsoto korenov, kinastopata v stevcu:
limn→∞
an = limn→∞
√n + 2−√n
1= lim
n→∞(√
n + 2−√n) · (√n + 2 +√
n)
1 · (√n + 2 +√
n).
V stevcu sedaj faktorja pomnozimo oz. upostevamo obrazec za razliko kvadra-tov: (a− b)(a + b) = a2 − b2. Dobimo
limn→∞
an = limn→∞
(√
n + 2)2 − (√
n)2
√n + 2 +
√n
= limn→∞
n + 2− n√n + 2 +
√n
= limn→∞
2√n + 2 +
√n
.

9.5. NALOGE S POSTOPKI ZA RESEVANJE 113
Ko gre n −→∞, gre izraz m =√
n + 2 +√
n −→∞.Izraz pod ulomkovo crto zamenjamo z m in upostevamo 3. lastnost konver-gentnih zaporedij:
limn→∞
an = limm→∞
2
m= 2 · lim
m→∞1
m= 0.
5. Izracunajmo limito zaporedja s splosnim clenom an = 2+4+6+...+2n√4n+3
.
Resitev: Na stevec 2 + 4 + 6 + . . . + 2n gledamo kot na vsoto prvih n-clenovaritmeticnega zaporedja. Prvi clen a1 = 2, zadnji clen an = 2n. Po obrazcusn = 1
2(a1 + an) sledi:
2 + 4 + 6 + . . . + 2n =(2 + 2n)n
2= n2 + n.
Torej je
limn→∞
an = limn→∞
2 + 4 + 6 + . . . + 2n√4n + 3
= limn→∞
n2 + n√4n + 3
.
Dalje resujemo kot v nalogi 3:
limn→∞
an = limn→∞
(n2 + n)/n2
√4n + 3/n2
= limn→∞
1 + 1n√
1 + 3n4
=1 + 0√1 + 0
= 1.
6. Izracunajmo limito zaporedja s splosnim clenom an = ( 2n2n+1
)n.
Resitev: Splosni clen preoblikujemo tako, da bomo lahko upostevali dejstvo,da je
limn→∞
(1 +1
n)n = e.
Delimo (2n) : (2n + 1) = 1 in ostanek je −1. Po osnovnem izreku o deljenjupolinomov lahko ulomek zapisemo
2n
2n + 1= 1 +
−1
2n + 1= 1 +
1
−(2n + 1).
Torej je
limn→∞
an = limn→∞
(2n
2n + 1)n = lim
n→∞(1 +
1
−(2n + 1))n.

114 POGLAVJE 9. ZAPOREDJA
Da bomo lahko uporabili limn→∞
(1 + 1n)n = e, moramo v imenovalcu drugega
clena v oklepaju imeti enak izraz kot v eksponentu. Splosni clen zaporedjapreoblikujemo takole:
limn→∞
an = limn→∞
(1 +1
−(2n + 1))
2n2 = lim
n→∞((1 +
1
−(2n + 1))2n)
12 =
= ( limn→∞
(1 +1
−(2n + 1))2n)
12 .
Oznacimo A = limn→∞
(1 + 1−(2n+1)
)2n.
Nas rezultat bo limn→∞
an = A12 .
Najprej pa poiscimo A:
A = limn→∞
(1 +1
−(2n + 1))2n = lim
n→∞(1 +
1
−(2n + 1))2n+1−1 =
= limn→∞
(1+1
−(2n + 1))(2n+1)−1 = lim
n→∞((1+
1
−(2n + 1))(2n+1)·(1+
1
−(2n + 1))−1).
Ker je limn→∞
(1 + 1−(2n+1)
)−1 = 1, je
A = limn→∞
((1 +1
−(2n + 1))(2n+1) = lim
n→∞((1 +
1
−(2n + 1))−(2n+1)(−1) =
= ( limn→∞
(1 +1
−(2n + 1))−(2n+1))−1.
Ker je limn→∞
(1 + 1−(2n+1)
)−(2n+1) = e, je
A = e−1.
Potem pa jelim
n→∞an = A
12 = (e(−1))
12 = e−
12 .
7. Podano je zaporedje s splosnim clenom an = 2n+24n−3
. Zapisimo prvih pet clenovzaporedja in ugotovimo njegove lastnosti (narascanje, padanje, omejenost).Ali je zaporedje, konvergentno (ce je, zapisimo se njegovo limito)?
Resitev:Prvi clen: a1 = 2·1+2
4·1−3= 2
1= 2.

9.5. NALOGE S POSTOPKI ZA RESEVANJE 115
Drugi clen: a2 = 2·2+24·2−3
= 65.
Tretji clen: a1 = 2·3+24·3−3
= 89.
Cetrti clen: a4 = 1013
.Peti clen: a5 = 12
17.
Sumimo, da bo zaporedje padajoce, zato preverimo neenakost an+1 ≤ an:
an+1 ≤ an2(n+1)+24(n+1)−3
≤ 2n+24n−3
2n+2+24n+4−3
≤ 2n+24n−3
2n+44n+1
≤ 2n+24n−3
2n+44n+1
− 2n+24n−3
≤ 0(2n+4)(4n−3)−(2n+2)(4n+1)
(4n+1)(4n−3)≤ 0
−14(4n+1)(4n−3)
≤ 0
.
Zadnja neenakost je izpolnjena za vsak n ∈ N, saj je imenovalec vedno pozi-tiven, stevec pa negativen, kar skupaj da negativno stevilo. Zato je zaporedjepadajoce. Ker je zaporedje padajoce, je gotovo navzgor omejeno s prvimclenom zaporedja, torej M = 2. Noben clen zaporedja ne bo negativen, zatoje zaporedje gotovo navzdol omejeno s stevilom 0. Ker je zaporedje navzgor innavzdol omejeno, je omejeno. Ker je zaporedje padajoce in navzdol omejeno,je gotovo konvergentno. Izracunajmo limito
limn→∞
2n + 2
4n− 3=
1
2.
8. Dano je zaporedje s splosnim clenom an = 2n−17n+1
. Dokazimo, da je zaporedjenarascajoce. Izracunajmo limito danega zaporedja in ugotovimo, od kateregaclena naprej se vsi nadaljni nahajajo v ε-okolici limite za epsilon je ε = 10−2.
Resitev: Preverimo, da neenakost an+1 > an velja za vsak n ∈ N:
2(n+1)−17n+1+1
> 2n−17n+1
(2n− 15)(n + 1) > (2n− 17)(n + 2)2n2 − 13n− 15 > 2n2 − 13n− 34
−15 > −34
.
Zadnja neenakost res velja za vsak n ∈ N, torej velja tudi prva, ki je njejekvivalentna. Zato je zaporedje narascajoce.
Limita zaporedja je
limn→∞
2n− 17
n + 1= 2.

116 POGLAVJE 9. ZAPOREDJA
V ε-okolici limite a = 2 se nahajajo vsi cleni zaporedja za katere velja:
|an − a| < ε.
Resimo neenacbo za dane podatke. Ker je zaporedje narascajoce, je limita agotovo vecja od vseh clenov zaporedja, zato je |an − a| = |a − an| = a − an.Dobimo
a− an < ε2− 2n−17
n+1< 10−2
19n+1
< 1100
19 · 100 < n + 11899 < n
.
To pomeni, da 1899. clen se ne lezi v ε-okolici limite, vsi nadaljnji pa. Pravilenodgovor bi se glasil: od 1900. clena dalje, lezijo vsi cleni v ε-okolici limite.
Poglavje 10
Vrste
10.1 Vrste
Definicija 7. Naj bo dano zaporedje a1, a2, a3, . . . Neskoncno vsoto
a1 + a2 + a3 + . . . + an + . . .
imenujemo vrsta, stevila a1, a2, a3, . . . pa cleni vrste. Vsoto
sn = a1 + a2 + a3 + . . . + an
imenujemo n-ta delna vsota vrste. Pri tem je s1 = a1, s2 = a1 + a2, . . . zaporedjedelnih vsot. Vrsta je konvergentna, ce je konvergentno zaporedje delnih vsot. Cezaporedje delnih vsot ni konvergentno pravimo, da je vrsta divergentna. Limitozaporedja delnih vsot imenujemo vsota vrste.
Zgled 56. Vrsta1 + 2 + 3 + . . . + n + . . .
je divergentna, ker je zaporedje delnih vsot sn = n(n+1)2
neomejeno.
Zgled 57. Vsota vrste
1 +1
1!+
1
2!+ . . . +
1
n!+ . . .
je e.
Zgled 58. Za vrsto1
1 · 5 +1
5 · 9 +1
9 · 13+ . . .
dokazimo, da je konvergentna in dolocimo njeno vsoto.Dolociti moramo zaporedje delnih vsot, kar ni vedno enostavno. Uporabili bomo
naslednji postopek. Najprej uganemo splosni clen zaporedja an = 1(4n−3)(4n+1)
. Zapisimo
117

118 POGLAVJE 10. VRSTE
ta ulomek kot vsoto dveh ulomkov an = A(4n−3)
+ B(4n+1)
. Ker je 1(4n−3)(4n+1)
=A
(4n−3)+ B
(4n+1)= A(4n+1)+B(4n−3)
(4n−3)(4n+1)= n(4A+4B)+A−3B
(4n−3)(4n+1), primerjamo clene na skrajni desni
s cleni na skrajni levi, kar nam da 4A + 4B = 0 in A− 3B = 1. Od tod izracunamoA = 1
4in B = −1
4. Torej je an = 1
4(4n−3)− 1
4(4n+1). Zapisimo sedaj n-to delno vsoto
sn = (14− 1
20) + ( 1
20− 1
36) + ( 1
36− 1
52) + . . . + ( 1
4(4n−7)− 1
4(4n−3)) + ( 1
4(4n−3)− 1
4(4n+1)).
Hitro vidimo, da je sn = 14− 1
4(4n+1). Izracunajmo se
limn→∞
=1
4− 1
4(4n + 1)=
1
4.
Torej vrsta je konvergentna in ima vsoto 14.
Geometrijska vrsta je vrsta∑∞
k=0 aqk s splosnim clenom ak = aqk. Ce jeq 6= 1, velja
sn =n∑
k=0
aqk = a + aq + aq2 + . . . + aqn = aqn+1 − 1
q − 1.
Vemo, da za |q| < 1 zaporedje qn konvergira k 0 in je zato
limn→∞
sn =a
1− q.
Ce pa je q = 1, je
sn =n∑
k=0
a = (n + 1)a.
To zaporedje je neomejeno, torej je vrsta divergentna.
Zgled 59. Izracunajmo vsoto geometrijske vrste
1
5+
1
52+
1
53+ . . . .
Najprej izpostavimo 15
in dobimo
1
5(1 +
1
5+
1
52+
1
53+ . . .) =
1
5(∞∑
k=0
1(1
5)k).
Torej a = 1 in q = 15, zato je
1
5+
1
52+
1
53+ . . . =
1
5(
1
1− 15
) =1
4.
10.2. VRSTE S POZITIVNIMI CLENI 119
Potreben in zadosten pogoj, da je vrsta konvergentna je:Vrsta je konvergentna, ce lahko za poljubno majhen ε najdemo taksen clen za-
poredja sn, da je za poljubno naravno stevilo p izpolnjena neenacba
|sn+p − sn| < ε. (10.1.1)
Ta kriterij je v praksi neuporaben. V nadaljevanju bomo zato spoznali razlicnekriterije za dolocevanje konvergentnosti vrst.
Iz 10.1.1 sledi
|sn+p − sn| = |an+1 + an+2 + an+3 + . . . + an+p| < ε,
od tod je
|an+p| = |(sn+p − sn)− (sn+p−1 − sn)| ≤ |sn+p − sn|+ |sn+p−1 − sn| < ε + ε = 2ε.
Ker je ε poljubno majhen, jelim
n→∞an = 0.
Temu pogoju pravimo Cauchyevemu pogoj. Da ta pogoj ni zadosten se lahkoprepricamo, ce opazujemo harmonicno vrsto
1 +1
2+
1
3+
1
4+ . . . +
1
n+ . . . .
Njeni cleni konvergirajo k 0, vendar je harmonicna vrsta divergentna, pokazati seda dokazati, da ne zadosca Cauchyevemu pogoju.
10.2 Vrste s pozitivnimi cleni
Ce imajo v vrsti a1 +a2 +a3 + . . .+an + . . . vsi cleni pozitiven predznak, imenujemotako vrsto vrsta s pozitivnimi cleni.
10.2.1 Ugotavljanje konvergentnosti vrste z majoranto
Denimo, da imamo dve vrsti s pozitivnimi cleni:
u1 + u2 + u3 + . . . + un + . . .
inv1 + v2 + v3 + . . . + vn + . . .

120 POGLAVJE 10. VRSTE
ter naj med istoleznimi cleni velja relacija
un ≤ vn.
Ce je druga vrsta konvergentna, tedaj je konvergentna tudi prva vrsta. Ce pa je prvavrsta divergentna, je tudi druga vrsta divergentna. Vrsto, katere konvergentnost(ali divergentnost) poznamo imenujemo majoranta. Za preizkus z majoranto vza-memo najpogosteje harmonicno vrsto za ugotavljanje divergentnosti podane vrstein geometrijsko vrsto s q < 1 za ugotavljanje konvergentnosti podane vrste. Temukriteriju pravimo tudi primerjalni kriterij.
Zgled 60. Z majorantno ugotovimo ali je dana vrsta
1 +1√2
+1√3
+1√4
+ . . . +1√n
+ . . .
konvergentna ali divergentna. Za majoranto vzamemo kar harmonicno vrsto
1 +1
2+
1
3+
1
4+ . . . +
1
n+ . . . .
Ce primerjamo istolezne clene ugotovimo, da so imenovalci v harmonicni vrsti vecjiod ustreznih imenovalcev preiskovane vrste. Zato so posamezni cleni harmonicnevrste manjsi od istoleznih clenov preiskovane vrste. Ker je harmonicna vrsta diver-gentna, je tudi ta vrsta divergentna.
Zgled 61. Z majoranto ugotovimo konvergentnost vrste
1 +1
2 · 5 +1
3 · 52+
1
4 · 53+ . . . +
1
n · 5n−1.
Za majoranto vzamemo geometrijsko vrsto
1 +1
5+
1
52+
1
53+ . . . +
1
5n−1.
Vsi imenovalci v majoranti so manjsi od ustreznih imenovalcev v preiskovani vrsti,zato so cleni majorante vecji od clenov preiskovane vrste. Ker je majoranta konver-gentna z vsoto 5
4, je tudi preiskovana vrsta konvergentna.
10.2.2 D’ Alambertov kriterij
Naj bo∑∞
n=1 an taka vrsta s pozitivnimi cleni, za katero obstaja limn→∞
an+1
an, ki jo
oznacimo s q. Ce je q < 1, je vrsta konvergentna. Ce pa je q > 1, je vrstadivergentna. Kadar je q = 1 nam D’ Alambertov kriterij ne da odlocitve in moramokonvergentnost ali divergentnost vrste dolociti z drugimi metodami.

10.2. VRSTE S POZITIVNIMI CLENI 121
Zgled 62. Z D’ Alambertovim kriterijem ugotovimo ali je vrsta
1 +3
2 · 3 +32
22 · 5 +33
23 · 7 + . . .
konvergentna ali divergentna.Najprej moramo dolociti splosni clen zaporedja an. Najprej zapisimo nekaj zacetnih
clenov zaporedja
a1 = 1, a2 =3
2 · 3 , a3 =32
22 · 5 , . . . .
Opazimo, da v stevcu ulomka nastopa geometrijsko zaporedje 30, 31, 32, . . . , 3n−1, . . ..V imenovalcu ulomka pa sta dve zaporedji 20, 21, 22, . . . , 2n−1, . . . in aritmeticno za-poredje 1, 3, 5, . . . , 2n− 1, . . .. Splosni clen zaporedja je
an =3n−1
2n−1(2n− 1).
Zapisimo se
an+1 =3(n+1)−1
2(n+1)−1(2(n + 1)− 1)=
3n
2n(2n + 1).
Z D’ Alambertovim kriterijem dobimo
limn→∞
an+1
an
= limn→∞
3n
2n(2n+1)
3n−1
2n−1(2n−1)
= limn→∞
3n2n−1(2n− 1)
3n−12n(2n + 1)= lim
n→∞3(2n− 1)
2(2n + 1)=
3
2.
Vrsta je divergentna.
10.2.3 Raabejev kriterij
Naj bo∑∞
n=1 an vrsta s pozitivnimi cleni in Rn = n( an
an+1−1) ter lim
n→∞Rn = R. Tedaj
velja:
1. ce je R > 1, vrsta∑∞
n=1 an konvergira.
2. ce je R < 1, vrsta∑∞
n=1 an divergira.
3. ce je R = 1, tudi ta kriterij ne da odlocitve.
Zgled 63. Ugotovimo ali je vrsta
1
1 · 2 +1
2 · 3 +1
3 · 4 + . . . +1
n · (n + 1)+ . . .
122 POGLAVJE 10. VRSTE
konvergentna.Ce uporabimo D’ Alambertov kriterij dobimo
limn→∞
an+1
an
= limn→∞
1(n+1)·(n+2)
1n·(n+1)
= limn→∞
n
n + 2= 1.
Torej nam ta kriterij ne da odlocitve. Ce opravimo preizkus z Raabejevim kriterijemdobimo
limn→∞
n(an
an+1
− 1) = limn→∞
n(
1n·(n+1)
1(n+1)·(n+2)
− 1) = limn→∞
n(n + 2
n− 1) = 2.
Ker je limita vecja od 1, je vrsta konvergentna. Za vajo lahko izracunate se njenovsoto.
10.3 Absolutno in pogojno konvergentne vrste
Vrsta a1 + a2 + a3 + . . . + an + . . . je absolutno konvergentna, ce je konvergentnavrsta iz absolutnih vrednosti posameznih clenov
|a1|+ |a2|+ |a3|+ . . . + |an|+ . . . .
Ce je vrsta konvergentna, vrsta iz absolutnih vrednosti clenov pa ne, pravimo, da jetaka vrsta pogojno konvergentna.
Za absolutno konvergentne vrste velja izrek:Vsaka absolutno konvergentna vrsta je konvergentna.
Konvergentnost absolutno konvergentnih vrst ugotavljamo na enak nacin, kakorugotavljamo konvergentnost vrst s samimi pozitivnimi cleni. Pri tem seveda velja,da moramo vedno jemati absolutne vrednosti posameznih clenov.
10.4 Alternirajoce vrste
Alternirajoca vrsta je vrsta v kateri se izmenjujejo pozitivni in negativni cleni:
a1 − a2 + a3 − a4 + a5 − a6 + . . .
Alternirajoca vrsta je konvergentna, ce se njeni cleni po absolutni vrednosti stalnomanjsajo in limitirajo proti 0.

10.5. NALOGE S POSTOPKI ZA RESEVANJE 123
Zgled 64. Vrsta
1− 1
2+
1
3− 1
4+
1
5− 1
6+
1
7− 1
8+ . . .
je alternirajoca vrsta, katere cleni so cleni harmonicne vrste v katerih pa se predznakclenov izmenjuje. Ta vrsta je konvergentna, ker je izpolnjen pogoj
limn→∞
an = limn→∞
1
n= 0.
Seveda pa vrsta ni absolutno konvergentna, saj je vrsta v kateri so vsi cleni opreml-jeni s pozitivnim predznakom harmonicna vrsta, za katero pa vemo, da je diver-gentna.
Za pogojno konvergentne vrste velja naslednja ugotovitev:Ce je vrsta pogojno konvergentna, se da s primernim vrstnim redom clenov
doseci, da ima nova vrsta poljubno vnaprej predpisano vsoto.
10.5 Naloge s postopki za resevanje
1. Izracunajmo1
1 · 3 +1
2 · 4 +1
3 · 5 +1
4 · 6 + . . . .
Resitev: Zapisimo splosni clen zaporedja
an =1
n(n + 2)
kot vsoto ulomkov (glej zgled 58)
an =1
n(n + 2)=
A
n+
B
(n + 2).
Ker jeA(n + 2) + Bn
n(n + 2)=
n(A + B) + 2A
n(n + 2)=
1
n(n + 2),
je A + B = 0 in 2A = 1. Torej je A = 12
in B = −12. Splosni clen zaporedja
zapisan drugace je
an =1
2n− 1
2(n + 2).
124 POGLAVJE 10. VRSTE
Sestejmo n-clenov zaporedja
sn = (1
2− 1
6) + (
1
4− 1
8) + (
1
6− 1
10) + (
1
8− 1
10) + . . . + (
1
2n− 4− 1
2n)+
+(1
2n− 2− 1
2n + 2) + (
1
2n− 1
2n + 4) =
1
2+
1
4− 1
2n + 2− 1
2n + 4.
Izracunajmo
limn→∞
(1
2+
1
4− 1
2n + 2− 1
2n + 4) =
3
4.
Torej vrsta je konvergentna in ima vsoto 34.
2. Raziscimo konvergenco vrste
1 +1
1!+
1
2!+
1
3!+ . . . +
1
(n− 1)!+ . . . .
Resitev: Z D’ Alambertovim kriterijem dobimo
limn→∞
an+1
an
= limn→∞
1n!1
(n−1)!
= limn→∞
(n− 1)!
n!= lim
n→∞1 · 2 · 3 · . . . · (n− 1)
1 · 2 · 3 · . . . · (n− 1) · n = limn→∞
1
n= 0.
Vrsta je konvergentna.
3. Ugotovimo ali je konvergentna vrsta
1
2+
3!
2 · 4 +5!
2 · 4 · 6 +7!
2 · 4 · 6 · 8 + . . . +(2n− 1)!
2 · 4 · 6 · 8 · . . . (2n).
Resitev: Z D’ Alambertovim kriterijem dobimo
limn→∞
an+1
an
= limn→∞
(2n+1)!2·4·6·8·...(2n)(2n+2)
(2n−1)!2·4·6·8·...(2n)
= limn→∞
(2n)(2n + 1)
(2n + 2)= ∞.
Torej vrsta je divergentna.
Poglavje 11
Funkcije in njihove lastnosti
11.1 Funkcije
Naj bosta A in B dve neprazni mnozici. Funkcija (preslikava) f , ki slika iz mnoziceA v mnozico B
f : A −→ B
je predpis, ki vsakemu elementu a iz mnozice A priredi en element b iz mnozice B
af7−→ b.
V matematiki je bolj obicajna oznaka
f(a) = b.
Mnozico A imenujemo definicijsko obmocje funkcije f (oznaka: Df ). Element bimenujemo slika elementa a. Mnozica vseh slik elementov mnozice A je zalogavrednosti (oznaka Zf ). Zaloga vrednosti je podmnozica mnozice B: Zf ⊆ B.
Zgled 65. Vsako leto tehtamo pridelek (v kg). Definiramo lahko funkcijo, ki vsakemuletu priredi kolicino pridelka.
Zgled 66. Na vremenski postaji redno merijo kolicino padavin (v mm). Definiramolahko funkcijo, ki vsakemu dnevu priredi kolicino padavin tistega dne.
11.2 Realne funkcije
V nadaljevanju bomo obravnavali le funkcije, ki slikajo iz neke podmnozice real-nih stevil v mnozico realnih stevil. Taki preslikavi f : R −→ R pravimo realna
125

126 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
funkcija. Predpis funkcije obicajno zapisemo v obliki y = f(x). Spremenljivko ximenujemo neodvisna, spremenljivko y pa odvisna spremenljivka.
Definicijsko obmocjeDefinicijsko obmocje Df realne funkcije je mnozica
Df = {x ∈ R; f(x) ∈ R}.Zgled 67. Ali lahko definiramo funkcijo f : R −→ R s predpisom f(x) = 1
x?
Odgovor je ”ne”, saj je f(0) = 10
nedefiniran izraz.Dobro definirana funkcija je g : R\{0} −→ R, s predpisom g(x) = 1
x.
Preprosto povedano, je definicijsko obmocje funkcije mnozica taksnih realnih stevil,ki jih lahko vstavimo v izraz za predpis funkcije in ga nato znamo izracunati. Ker
f(0) =1
0
ne znamo izracunati, zato x = 0 ni v definicijskem obmocju funkcije f .
Zaloga vrednostiNaj bo x0 ∈ Df in f(x0) = y0 potem pravimo, da ima funkcija f v x0 vrednost y0.Zaloga vrednosti Zf je mnozica vseh vrednosti, ki jih funkcija f zavzame:
Zf = {f(x); x ∈ Df}.
Graf funkcijeGraf funkcije f je mnozica vseh urejenih parov (x, f(x)), kjer je x ∈ Df :
Gf = {(x, y); x ∈ Df , y = f(x)}.Graf realne funkcije je podmnozica R × R ravnine in ga obicajno predstavimo vpravokotnem koordinatnem sistemu.
Asimptota funkcijeAsimptota je krivulja (najpogosteje premica), ki se v neskoncnosti (±∞) priblizujedrugi krivulji (grafu funkcije), ne da bi jo dosegla.
Zgled 68. Ali je mnozica tock na sliki 11.1 graf funkcije? Odgovor je negativen.Definicija funkcije je, da vsakemu elementu iz definicijskega obmocja priredi en el-ement iz zaloge vrednosti. Na nasi sliki pa sta stevilu x prirejena kar dva elementay1 in y2. Zato mnozica tock na sliki ni graf nobene funkcije.

11.2. REALNE FUNKCIJE 127
Slika 11.1: Ni graf nobene funkcije.
Zacetna vrednostZacetna vrednost funkcije f je vrednost funkcije pri x = 0, torej stevilo f(0).Tocka (0, f(0)) je presecisce grafa funkcije f z ordinatno osjo.
Nicla funkcijeStevilo x1 je nicla funkcije natanko takrat, ko je vrednost funkcije v x1 enaka 0:f(x1) = 0. Tocka (x1, 0) je presecisce grafa funkcije f z abscisno osjo.
Pozitivnost in negativnostFunkcija f je pozitivna na intervalu (a, b), ce za vsak x ∈ (a, b) zavzame samopozitivne vrednosti: f(x) > 0, ∀x ∈ (a, b). Graf funkcije na intervalu (a, b) lezi nadabscisno osjo.Funkcija f je negativna na intervalu (a, b), ce za vsak x ∈ (a, b) zavzame samonegativne vrednosti: f(x) < 0, ∀x ∈ (a, b). Graf funkcije na intervalu (a, b) lezi podabscisno osjo.
Narascanje in padanje funkcijeFunkcija f narascajoca na intervalu (a, b), ce za vsak x1, x2 ∈ (a, b) velja:x1 < x2 ⇒ f(x1) ≤ f(x2). Gledano iz leve proti desni gre graf funkcije navzgor.Funkcija f padajoca na intervalu (a, b), ce za vsak x1, x2 ∈ (a, b) velja:x1 < x2 ⇒ f(x1) ≥ f(x2). Gledano iz leve proti desni gre graf funkcije navzdol.
Sodost lihostFunkcija je soda, ce za vsak x ∈ Df velja enakost: f(−x) = f(x). Graf funkcije jesimetricen glede na ordinatno os.

128 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
Funkcija je liha, ce za vsak x ∈ Df velja enakost: f(−x) = −f(x). Graf funkcije jesimetricen glede na koordinatno izhodisce.Vecina funkcij ni niti sodih niti lihih.
Kompozitum funkcij ali sestavljena funkcijaNaj bosta f : A −→ B in g : B −→ C realni funkciji. Potem je kompozitumfunkcij g in f funkcija g ◦ f : A −→ C s predpisom (g ◦ f)(x) = g(f(x)).
Na poljuben element x ∈ A najprej deluje funkcija f in ga preslika v elementf(x) ∈ B. Nato pa na element f(x) deluje se funkcija g in ga preslika v elementg(f(x)) ∈ C. Kar zapisemo
xf7−→ f(x)
g7−→ g(f(x)).
Kompozitum ni komutativen, to pomeni, da f ◦ g 6= g ◦ f .
Zgled 69. Podani sta funkciji f(x) = x + x2 in g(x) = ex. Poiscimo funkciji f ◦ gin g ◦ f .(f ◦ g)(x) = f(g(x)) = f(ex) = ex + (ex)2 = ex + e2x
(g ◦ f)(x) = g(f(x)) = g(x + x2) = e(x+x2)
Inverzna funkcijaNaj bo funkcija f : X −→ Y in naj vsako vrednost iz mnozice Y zavzame natankoenkrat. Potem lahko definiramo inverzno funkcijo f−1 : Y −→ X, pri cemer velja:
f−1(f(x)) = x, za vsak x ∈ X,
f(f−1(y)) = y, za vsak y ∈ Y.
Zgled 70. Poiscimo inverzno funkcijo funkcije f(x) = 5x− 1.To je linearna funkcija, ki vsako vrednost iz zaloge vrednosti zavzame natanko enkrat,zato njena inverzna funkcija obstaja. Predpis zanjo poiscemo tako, da najprej za-menjamo vlogi odvisne in neodvisne spremenljivke:
y = 5x− 1 ⇒ x = 5y − 1.
Sedaj pa iz zadnje enakosti izrazimo y:
y =x + 1
5.
Inverzna funkcija ima predpis:
f−1(x) =x + 1
5.
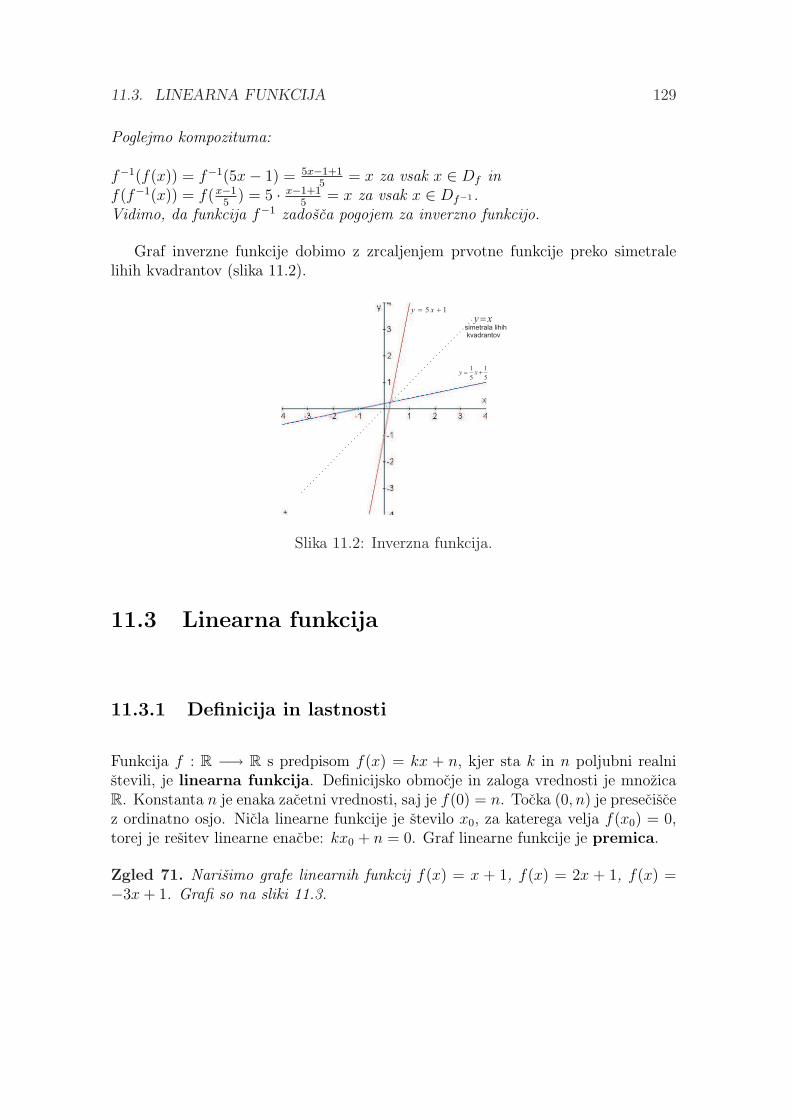
11.3. LINEARNA FUNKCIJA 129
Poglejmo kompozituma:
f−1(f(x)) = f−1(5x− 1) = 5x−1+15
= x za vsak x ∈ Df inf(f−1(x)) = f(x−1
5) = 5 · x−1+1
5= x za vsak x ∈ Df−1.
Vidimo, da funkcija f−1 zadosca pogojem za inverzno funkcijo.
Graf inverzne funkcije dobimo z zrcaljenjem prvotne funkcije preko simetralelihih kvadrantov (slika 11.2).
15 += xy
5
1
5
1+= xy
xy =
simetrala lihih
kvadrantov
Slika 11.2: Inverzna funkcija.
11.3 Linearna funkcija
11.3.1 Definicija in lastnosti
Funkcija f : R −→ R s predpisom f(x) = kx + n, kjer sta k in n poljubni realnistevili, je linearna funkcija. Definicijsko obmocje in zaloga vrednosti je mnozicaR. Konstanta n je enaka zacetni vrednosti, saj je f(0) = n. Tocka (0, n) je preseciscez ordinatno osjo. Nicla linearne funkcije je stevilo x0, za katerega velja f(x0) = 0,torej je resitev linearne enacbe: kx0 + n = 0. Graf linearne funkcije je premica.
Zgled 71. Narisimo grafe linearnih funkcij f(x) = x + 1, f(x) = 2x + 1, f(x) =−3x + 1. Grafi so na sliki 11.3.

130 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
Slika 11.3: Grafi linearnih funkcij iz zgleda 71.
Koeficient k imenujemo smerni koeficient. Vecji po absolutni vrednosti jesmerni koeficient, bolj strma je premica (glej sliko 11.3). Ce je smerni koeficientnegativen k < 0, je linearna funkcija padajoca. Ce je smerni koeficient pozitivenk > 0, je linearna funkcija narascajoca. Ce je smerni koeficient enak 0, dobimokonstantno funckijo y = n za vsak x ∈ R, njen graf je premica vzporedna abscisniosi (glej sliko 11.4). Premice z istim smernim koeficientom so vzporedne (glej sliko11.3).Naj bosta (x1, y1) in (x2, y2) poljubni tocki na premici. Smerni koeficient je razmerjemed razlikama ordinat in abscis poljubnih dveh tock na premici:
k =y1 − y2
x1 − x2
=a
b.
To razmerje imenujemo tudi diferencni kolicnik. Smerni koeficient ab
nam pove: kose x poveca (zmanjsa, ce je b negativen) za b enot, se y poveca(a > 0) ali zmanjsa(a < 0) za a enot. To nam lahko pomaga pri risanju premic. Po drugi strani paje smerni koeficient k enak tangensu kota ϕ, ki ga funkcija oklepa z x-osjo, karzapisemo
k = tanϕ
Zgled 72. Narisimo premico y = 35x− 2.
Da narisemo premico, potrebujemo dve tocki, ki lezita na premici.1. nacinTocki si vedno lahko izracunamo. Glej tabelo 11.1.

11.3. LINEARNA FUNKCIJA 131
Slika 11.4: Konstantna funkcija.
x y = 35x− 2
0 −21 −7
5
Tabela 11.1: Tabela za linearno funkcijo iz zgleda 72.
Dobimo dve tocki T1(0,−2) in T2(1,−75) ter ju vrisemo v koordinatni sistem in
skoznju narisemo premico.2. nacinTakoj opazimo, da bo sla premica skozi tocko T (0,−2), saj je −2 zacetna vrednost.Sedaj pa upostevamo pomen smernega koeficienta 3
5. Ce se x poveca za 5 enot, tedaj
se y poveca 3 enote, kar nam da tocko na premici (slika 11.5).
5
3
Slika 11.5: Premica iz zgleda 72.

132 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
11.3.2 Oblike enacbe premice
Poznamo tri oblike enacbe premice.Eksplicitna oblika: y = kx + n, o pomenu koeficientov k in n smo ze govorili.Implicitna oblika: ax+by−c = 0, kjer je ~n = (a, b) vektor pravokoten na premico.Odsekovna oblika: x
m+ y
n= 1; m,n 6= 0. Koeficienta m in n nam predstavljata
odseka na oseh: pesecisce z abscisno osjo je tocka (m, 0), z ordinatno pa tocka (0, n).
Enacba premice skozi dve tockiPoiscimo enacbo premice skozi tocki (x1, y1), (x2, y2). Smerni koeficient premiceskozi ti dve tocki je
k =y2 − y1
x2 − x1
.
Ko iscemo enacbo premice, se sprasujemo, kateremu pogoju mora zadoscati poljubnatocka (x, y), da bo lezala na premici. Vemo da je diferencni kolicnik med poljubnimatockama na premici enak k. Torej mora biti tudi diferencni kolicnik med tockama(x, y) in (x1, y1) enak k:
y − y1
x− x1
= k.
Ce zapisemo drugace, je enacba premice
y − y1 = k(x− x1).
Zgled 73. Zapisimo vse tri oblike enacbe premice, ki je graf linearne funkcije, zakatero velja f(4) = 3 in f(−4) = −1.
Ker je f(4) = 3 in f(−4) = −1, premica poteka skozi tocki A(4, 3) in B(−4,−1).Najprej izracunajmo smerni koeficient:
k =y2 − y1
x2 − x1
=−1− 3
−4− 4=−4
−8=
1
2.
Vstavimo znane podatke v enacbo
y − y1 = k(x− x1)
in dobimo
y − 3 =1
2(x− 4).
Izrazimo y, da dobimo eksplicitno obliko enacbe premice:
y =1
2x + 1.

11.4. KVADRATNA FUNKCIJA 133
Da dobimo imlicitno obliko enacbe premice, damo vse clene na levo stran tako, danam na desni ostane le se 0 in pomnozimo celo enacbo z 2:
2y − x− 2 = 0.
Za odsekovno obliko pustimo clena z x in y na levi strani, prosti clen pa damo nadesno stran:
−x + 2y = 2.
Na desni strani zelimo dobiti 1, zato celo enacbo delimo z 2 in dobimo odsekovnoobliko:
x
−2+
y
1= 1.
11.4 Kvadratna funkcija
11.4.1 Definicija in lastnosti
Funkcija f : R −→ R s predpisom f(x) = ax2+bx+c; a, b, c ∈ R je kvadratnafunkcija. Stevila a, b, c imenujemo koeficienti kvadratne funkcije. Definicijskoobmocje kvadratne funkcije je mnozica R. Graf kvadratne funkcije je parabola zenacbo y = ax2 + bx + c. Stevilo c je konstantni clen oz. zacetna vrednost funkcije,saj je f(0) = c. Tocka (0, c) je presecisce grafa funkcije z ordinatno osjo. Steviloa je vodilni koeficient. Ce je a = 0, je predpis funkcije f(x) = bx + c. To pa jelinearna funkcija, ki smo jo obravnavali v prejsnjem poglavju. Zato predpostavimo,da je a 6= 0. Vodilni koeficient vpliva na to, kako strma je parabola, in na to, alije parabola obrnjena navzdol ali navzgor. Vecji po absolutni vrednosti je vodilnikoeficient, bolj strma je parabola. Ce ja a > 0, je parabola obrnjena navzgor. Ce jea < 0, je parabola obrnjena navzdol. Glej sliki 11.6 in 11.7.
21
2y x=
22y x=
2y x=
Slika 11.6: Vodilni koeficient je pozitiven.

134 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
22xy -=
2xy -=
2
2
1xy -=
Slika 11.7: Vodilni koeficient je negativen.
Nicli x1, x2 kvadratne funkcije, sta resitvi kvadratne enacbe ax2 + bx + c = 0, kiju dobimo po obrazcu, ki ga ne bomo izpeljevali
x1,2 =−b±√D
2a,
kjer jeD = b2 − 4ac
diskriminanta kvadratne funkcije. Glede na vrednost diskriminante locimo tri moznosti(slika 11.8).
a) Ce je D > 0, ima enacba dve razlicni realni resitvi: x1 = −b+√
D2a
in
x2 = −b−√D2a
, kar pomeni, da ima funkcija dve nicli. Parabola seka abscisno osv dveh razlicnih tockah.
b) Ce je D = 0, ima enacba le eno resitev, saj je x1,2 = −b±√02a
= −b2a
. Recemo, daima funkcija eno dvojno niclo. Parabola se dotika abscisne osi.
c) Ce je D < 0, enacba nima realnih resitev in funkcija nima nicel. Parabolanima nobene skupne tocke z abscisno osjo.
Za nicli kvadratne funkcije veljata tudi Vietovi formuli:
x1 + x2 = − b
ain x1 · x2 =
c
a.
Teme je tocka T (p, q), v kateri ima kvadratna funkcija minimum oz. maksimum.Ce je a > 0 ima funkcija v tocki T (p, q) minimum. To pomeni, da pri x = p zavzamenajmanjso vrednost q. Njena zaloga vrednosti je Zf = [q,∞).Ce je a < 0 ima funkcija v tocki T (p, q) maksimum. To pomeni, da pri x = p

11.4. KVADRATNA FUNKCIJA 135
x
x
x
x
x
x
D>0 D=0 D<0
0a <
0a >
1x
1x
2x
2x
1,2x
1,2x
Slika 11.8: Pomen diskriminante.
zavzame najvecjo vrednost q. Njena zaloga vrednosti je Zf = (−∞, q] (slika 11.9).Koordinati temena lahko izracunamo po obrazcih:
p = − b
2a, q = −D
4a.
Premica x = p je simetrala parabole.
x
x
yy
( , )T p q
( , )T p q
p
p
q
q
c
c
x p=
x p=
0a >0a <
zf
zf
Slika 11.9: Teme in zaloga vrednosti kvadratne funkcije.
11.4.2 Oblike zapisa kvadratne funkcije
Vsako kvadratno funkcijo lahko zapisemo v treh oblikah.Splosna oblika: f(x) = ax2 + bx + c.
O pomenu koeficentov a, b, c smo ze govorili.
Temenska oblika: f(x) = a(x− p)2 + q.

136 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
Pri cemer je a vodilni koeficient, T (p, q) pa je teme parabole.
Oblika za nicli: f(x) = a(x− x1)(x− x2).Pri cemer je a vodilni koeficient, x1, x2 pa sta nicli kvadratne funkcije oz. resitvi
kvadratne enacbe ax2 + bx + c = 0.
Zgled 74. Zapisimo vse tri oblike predpisa kvadratne funkcije, za katero velja f(−2) =10, f(1) = −8 in f(2) = −6.
Ker nimamo podanega temena ali nicel, zacnemo s splosno obliko kvadratne funkcije:f(x) = ax2 + bx + c. Najprej moramo dolociti koeficiente a, b, c.Ker je f(−2) = 10, je 10 = a(−2)2 + b(−2) + c.Ker je f(1) = −8, je −8 = a(1)2 + b(1) + c.Ker je f(2) = −6, je −6 = a(2)2 + b(2) + c.Dobimo sistem treh enacb s tremi neznankami in ga resimo: a = 2, b = −4, c = −6.Splosna oblika kvadratne funkcije je f(x) = 2x2 − 4x− 6.
Obliko za nicli, dobimo tako, da predpis za funkcijo v splosni obliki razstavimo:f(x) = 2(x2− 2x− 3). Izraz v oklepajih lahko razstavimo po Vietovih pravilih ali poobrazcih s pomocjo diskriminante. Dobimo nicli x1 = 3, x2 = −1 in obliko za nicli:f(x) = 2(x− 3)(x + 1).
Za temensko obliko potrebujemo koordinate temena, ki ju izracunamo po obrazcih:
p = − b
2a= − −4
2 · 2 = 1
in
q = −D
4a= −b2 − 4ac
4a= −(−4)2 − 4 · 2 · (−6)
4 · 2 = −8.
Temenska oblika kvadratne funkcije je: f(x) = 2(x− 1)2 − 8.
11.4.3 Resevanje kvadratne neenacbe
Resevanje kvadratne neenacbe ax2 + bx + c > 0 pomeni iskanje mnozice stevil,za katera bo funkcija f(x) = ax2 + bx + c pozitivna. V mnozici resitev neenacbeax2 + bx + c < 0 pa so stevila, za katera je funkcija f(x) = ax2 + bx + c negativna.
Kvadratno neenacbo ax2 + bx + c > 0 ali ax2 + bx + c < 0 resimo tako, danajprej poiscemo morebitne nicle kvadratne funkcije f(x) = ax2 + bx + c. Natoz upostevanjem predznaka vodilnega koeficienta a skiciramo priblizni potek grafa

11.4. KVADRATNA FUNKCIJA 137
kvadratne funkcije f . Nato pa zapisemo interval ali unijo intervalov, na katerem(katerih) je kvadratna funkcija pozitivna ali negativna.
Zgled 75. Resimo kvadratno neenacbo x2 + 2x− 2 > 0.
Zanima nas, za katere x bo funkcija f(x) = x2 + 2x − 2 pozitivna. Poiscimo niclikvadratne funkcije f(x) = x2 + 2x− 2:
D = b2 − 4ac = 4 + 8 = 12,
x1 =−b +
√D
2a=−2 +
√12
2=−2 + 2
√3
2= −1 +
√3,
in
x2 =−b−√D
2a=−2−√12
2=−2− 2
√3
2= −1−
√3.
Skicirajmo parabolo. Ker je vodilni koeficient a = 1 > 0, bo parabola obrnjenanavzgor. Funkcija je pozitivna za tiste x, kjer parabola lezi nad abscisno osjo (slika11.10). Resitev je unija intervalov:
x ∈ (−∞,−1−√
3) ∪ (−1 +√
3,∞).
x1 3- +1 3- -
Slika 11.10: Graf funkcije f(x) = x2 + 2x− 2.

138 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
11.5 Potencna in korenska funkcija
11.5.1 Potence z racionalnimi eksponenti
Izraz an imenujemo potenca, pri cemer je a ∈ R osnova in n eksponent. Zanaravne eksponente je potenca definirana kot produkt n faktorjev a:
an = a · a · a . . . a (n faktorjev).
Za nicelni eksponent n = 0, je potenca definirana:
a0 = 1.
Za negativne cele eksponente je potenca definirana z zvezo:
a−n =1
an, a 6= 0.
Za poljubne racionalne eksponente je potenca definirana z zvezama:
a1m = m
√a,
anm = m
√an.
Pravila za racunanje s potencami:
Naj bosta a, b ∈ R in naj bosta m,n ∈ Q, potem veljajo spodnja pravila.
1. Produkt potenc z istima osnovama: anam = an+m.
2. Kvocient potenc z istima osnovama: an
am = an−m, a 6= 0.
3. Potenciranje potence: (an)m = anm.
4. Potenciranje produkta: (ab)n = anbn.
5. Potenciranje kvocienta: (ab)n = an
bn , b 6= 0.

11.5. POTENCNA IN KORENSKA FUNKCIJA 139
11.5.2 Koreni poljubnih stopenj
Naj bo n ∈ N in a ∈ R. Stevilo n-ti koren iz a je tisto stevilo x, za kateregavelja, da je xn = a. Torej
n√
a = x ⇔ xn = a.
Stevilo n imenujemo stopnja korena, x pa korenjenec. Potence sodih eksponen-tov vedno vrnejo nenegativno stevilo. Potence lihih stopenj pa vrnejo nenegativnostevilo, ko potenciramo nenegativno osnovo, in negativno stevilo, ko potenciramonegativno osnovo.
Zgled 76.
32 = 9 (−3)2 = 9 02 = 033 = 27 (−3)3 = −27 03 = 0
Naj pri tem opozorimo, da ima potenciranje pri racunanju prednost, zato je
−32 = −9.
Ce bi torej zeleli izracunati x = 4√−2, bi morali poiskati tako stevilo x, da bi
veljalo x4 = −2. Vemo, da tako stevilo ne obstaja.Koreni sodih stopenj so torej definirani le za nenegativna stevila (a ≥ 0). Medtem
ko so koreni lihih stopenj definirani za vsa realna stevila (a ∈ R).
Pravila za racunanje s koreni:
Vsak koren se da z zvezo anm = m
√an preoblikovati na potenco. Potem za
racunanje lahko uporabimo pravila za racunanje s potencami. Iz pravil za racunanjes potencami so izpeljana tudi pravila za racunanje s koreni.
Naj bosta a in b pozitivni realni stevili, m in n pa naravni stevili. Potem veljajospodnja pravila.
1. n√
am = ( n√
a)m,
2. n√
ab = n√
a · n√
b,
3. n√
ab
=n√an√
b, b 6= 0,
4. m√
n√
a = mn√
a,
5. np√
amp = n√
am,

140 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
6. n√
an = a, ce je n liho stevilo inn√
an = |a|, ce je n sodo stevilo.
Delno korenjenjeV rezultatih nikoli ne zapisujemo korenov velikih stevil, ce to ni potrebno. Velikastevila zapisemo kot produkte popolnih kvadratov (pri kvadratnem korenu) in vsakfaktor posebaj korenimo.
Zgled 77. Delno korenimo.√8 =
√4 · 2 =
√4 · √2 = 2
√2√
1620 =√
4 · 81 · 5 =√
4 · √81 · √5 = 2 · 9 · √5 = 18√
5
Podobno ravnamo tudi pri visjih korenih.
Zgled 78. Delno korenimo.3√
135 = 3√
27 · 5 = 3√
27 · 3√
5 = 3 3√
5
Racionalizacija ulomkovRacionalizacija ulomka pomeni, da ulomek, ki vsebuje korene, preoblikujemo tako,da v imenovalcu ni korena.
Ce je imenovalec enoclenik, storimo to tako, da stevec in imenovalec pomnozimos korenom, ki nastopa v imenovalcu.
Zgled 79. Racionalizirajmo ulomek 23√
5.
2
3√
5=
2 · √5
3√
5 · √5=
2 · √5
3 · 5 =2√
5
15
Ce je imenovalec vsota dveh stevil, stevec in imenovalec pomnozimo z razliko istihdveh stevil. In obratno, ce je imenovalec razlika, stevec in imenovalec pomnozimo zvsoto istih dveh stevil.
Zgled 80. Racionalizirajmo ulomka:2√3−1
= 2·(√3+1)
(√
3−1)(√
3+1)= 2·(√3+1)
3−1= 2·(√3+1)
2√3√
3+√
2=
√3(√
3−√2)
(√
3+√
2)(√
3−√2)=
√3(√
3−√2)3−2
=√
3(√
3−√2)
11.5.3 Definicija in lastnosti potencne funkcije
Funkcijo f : R −→ R s predpisom f(x) = xn, kjer je n ∈ Z imenujemo potencnafunkcija. Za n = 0 in n = 1 dobimo linearno funkcijo, zato ju ne uvrscamo medprave potencne funkcije. Potencne funkcije razdelimo v stiri skupine. Grafi funkcijposamezne skupine se po obliki ne razlikujejo. Razlicne so le strmine krivulj.

11.5. POTENCNA IN KORENSKA FUNKCIJA 141
Potencne funkcije z naravnim lihim eksponentom (vecjim od 1)
Definicijsko obmocje je mnozica realnih stevil: Df = R. Nicla je stevilo 0: f(0) =0. Zaloga vrednosti je mnozica realnih stevil: Zf = R. Vse potencne funkcije znaravnim lihim eksponentom so narascajoce in lihe funkcije. Graf katerekoli funkcijeiz te skupine poteka skozi tri znacilne tocke: (−1,−1), (0, 0), (1, 1).
Zgled 81. Poglejmo si grafa dveh predstavnikov te skupine: f(x) = x3 in g(x) = x5
(slika 11.11).
3xy =
5xy =
Slika 11.11: Potencne funkcije z naravnim lihim eksponentom.
Potencne funkcije z naravnim sodim eksponentom
Definicijsko obmocje je mnozica realnih stevil: Df = R. Nicla je stevilo 0: f(0) =0. Zaloga vrednosti je mnozica nenegativnih realnih stevil: Zf = R+∪{0}. Vsepotencne funkcije z naravnim sodim eksponentom so narascajoce na intervalu (0,∞)in padajoce na intervalu (−∞, 0). Potencne funkcije z naravnim sodim eksponentomso sode funkcije. Graf katerekoli funkcije iz te skupine poteka skozi tri znacilne tocke:(−1, 1), (0, 0), (1, 1).
Zgled 82. Poglejmo si grafa dveh predstavnikov te skupine: f(x) = x2 in g(x) = x4
(slika 11.12).
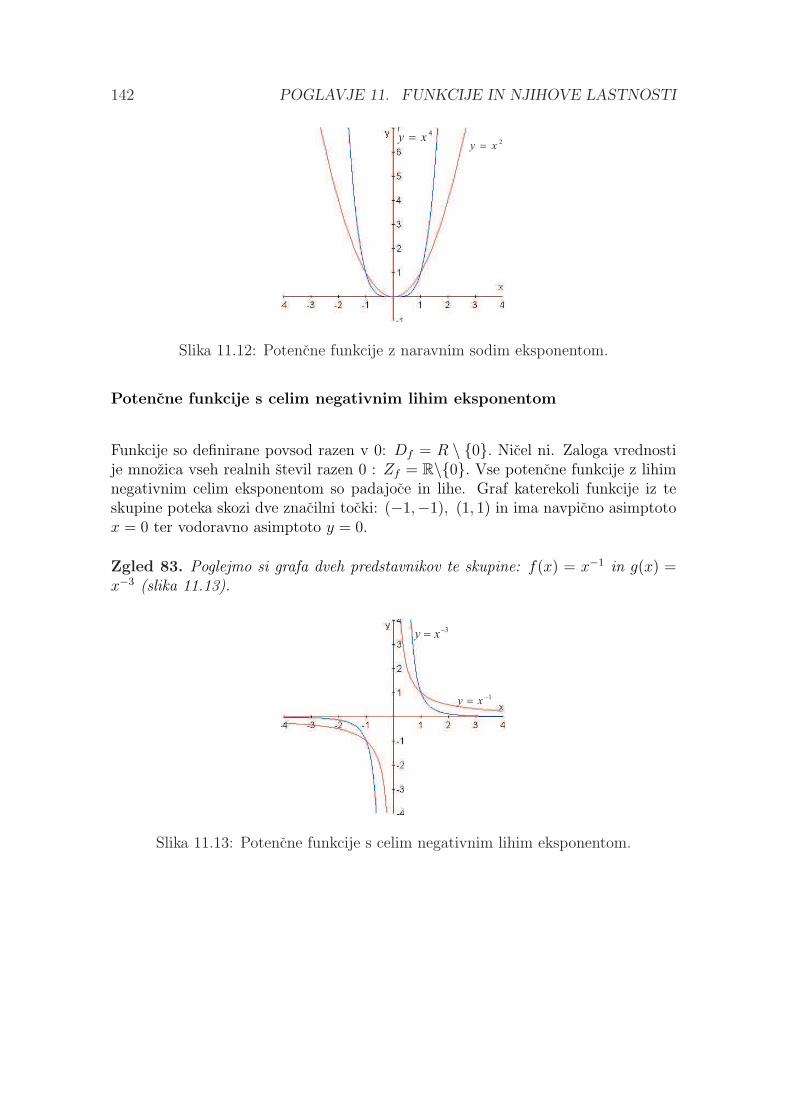
142 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
2xy =
4xy =
Slika 11.12: Potencne funkcije z naravnim sodim eksponentom.
Potencne funkcije s celim negativnim lihim eksponentom
Funkcije so definirane povsod razen v 0: Df = R \ {0}. Nicel ni. Zaloga vrednostije mnozica vseh realnih stevil razen 0 : Zf = R\{0}. Vse potencne funkcije z lihimnegativnim celim eksponentom so padajoce in lihe. Graf katerekoli funkcije iz teskupine poteka skozi dve znacilni tocki: (−1,−1), (1, 1) in ima navpicno asimptotox = 0 ter vodoravno asimptoto y = 0.
Zgled 83. Poglejmo si grafa dveh predstavnikov te skupine: f(x) = x−1 in g(x) =x−3 (slika 11.13).
1-
= xy
3-
= xy
Slika 11.13: Potencne funkcije s celim negativnim lihim eksponentom.

11.5. POTENCNA IN KORENSKA FUNKCIJA 143
Potencne funkcije s celim negativnim sodim eksponentom
Funkcije so definirane vsepovsod razen v 0: Df = R\{0}. Nicel ni. Zaloga vred-nosti je mnozica pozitivnih realnih stevil: Zf = R+. Vse potencne funkcije s celimnegativnim sodim eksponentom so padajoce na intervalu (0,∞) in narascajoce naintervalu (−∞, 0). So sode funkcije. Graf katerekoli funkcije iz te skupine poteka
2-
= xy
4-
=xy
Slika 11.14: Potencne funkcije s celim negativnim sodim eksponentom.
skozi dve znacilni tocki: (−1, 1), (1, 1) in ima navpicno asimptoto x = 0 in vodor-avno asimptoto y = 0.
Zgled 84. Poglejmo si grafa dveh predstavnikov te skupine: f(x) = x−2 in g(x) =x−4 (slika 11.14).
11.5.4 Definicija in lastnosti korenske funkcije
Korensko funkcijo n-ti koren f(x) = n√
x za n ∈ N definiramo kot inverznofunkcijo potencne funkcije f(x) = xn. Ker so koreni lihih stopenj definirani za vsarealna stevila, koreni sodih stopenj pa le za nenegativna realna stevila, locimo dveskupini korenskih funkcij.

144 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
Korenske funkcije z lihim korenskim eksponentom
Funkcije te skupine lahko v splosnem zapisemo kot
f(x) = n√
x, n = 2k − 1, k ∈ N
in so inverzne funkcije k potencnim funkcijam z naravnimi lihimi eksponenti. Pogoj,da inverzna funkcija obstaja je, da (v nasem primeru potencna) funkcija zavzamevse vrednosti iz zaloge vrednosti natanko enkrat. Ta pogoj je izpolnjen, zato jekorenska funkcija z lihim korenskim eksponentom definirana kot
f(x) = n√
x ⇔ (f(x))n = x.
Definicijsko obmocje so vsa realna stevila: Df = R, saj je zaloga vrednosti potencnihfunkcij z naravnimi lihimi eksponenti mnozica realnih stevil. Nicla je stevilo 0:f(0) = n
√0 = 0. Zaloga vrednosti je mnozica realnih stevil: Zf = R, saj je definici-
jsko obmocje potencnih funkcij z naravnimi lihimi eksponenti tudi mnozica realnihstevil. Te korenske funkcije so narascajoce in lihe. Graf korenske funkcije z lihimkorenskim eksponentom dobimo tako, da graf potencne funkcije z ustreznim ekspo-nentom prezrcalimo preko simetrale lihih kvadrantov.
Zgled 85. Poglejmo si grafa dveh predstavnikov funkcij te skupine f(x) = 3√
x ing(x) = 5
√x (slika 11.15).
3xy =
5xy =
Slika 11.15: Graf korenskih funkcij z lihim korenskim eksponentom.
Korenske funkcije s sodim korenskim eksponentom
Funkcije te skupine lahko v splosnem zapisemo kot
f(x) = n√
x, n = 2k, k ∈ N
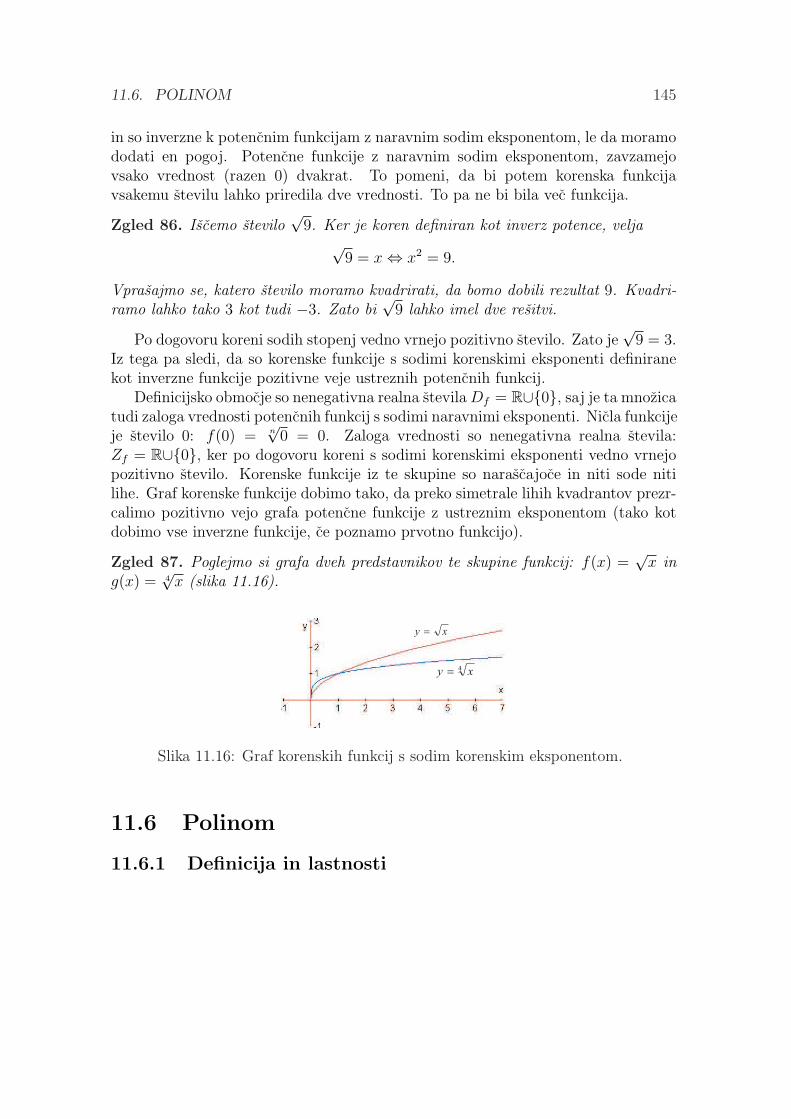
11.6. POLINOM 145
in so inverzne k potencnim funkcijam z naravnim sodim eksponentom, le da moramododati en pogoj. Potencne funkcije z naravnim sodim eksponentom, zavzamejovsako vrednost (razen 0) dvakrat. To pomeni, da bi potem korenska funkcijavsakemu stevilu lahko priredila dve vrednosti. To pa ne bi bila vec funkcija.
Zgled 86. Iscemo stevilo√
9. Ker je koren definiran kot inverz potence, velja√
9 = x ⇔ x2 = 9.
Vprasajmo se, katero stevilo moramo kvadrirati, da bomo dobili rezultat 9. Kvadri-ramo lahko tako 3 kot tudi −3. Zato bi
√9 lahko imel dve resitvi.
Po dogovoru koreni sodih stopenj vedno vrnejo pozitivno stevilo. Zato je√
9 = 3.Iz tega pa sledi, da so korenske funkcije s sodimi korenskimi eksponenti definiranekot inverzne funkcije pozitivne veje ustreznih potencnih funkcij.
Definicijsko obmocje so nenegativna realna stevila Df = R∪{0}, saj je ta mnozicatudi zaloga vrednosti potencnih funkcij s sodimi naravnimi eksponenti. Nicla funkcijeje stevilo 0: f(0) = n
√0 = 0. Zaloga vrednosti so nenegativna realna stevila:
Zf = R∪{0}, ker po dogovoru koreni s sodimi korenskimi eksponenti vedno vrnejopozitivno stevilo. Korenske funkcije iz te skupine so narascajoce in niti sode nitilihe. Graf korenske funkcije dobimo tako, da preko simetrale lihih kvadrantov prezr-calimo pozitivno vejo grafa potencne funkcije z ustreznim eksponentom (tako kotdobimo vse inverzne funkcije, ce poznamo prvotno funkcijo).
Zgled 87. Poglejmo si grafa dveh predstavnikov te skupine funkcij: f(x) =√
x ing(x) = 4
√x (slika 11.16).
xy =
4xy =
Slika 11.16: Graf korenskih funkcij s sodim korenskim eksponentom.
11.6 Polinom
11.6.1 Definicija in lastnosti

146 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
Polinom stopnje n je funkcija p : R −→ R definirana s predpisom:
p(x) = anxn + an−1xn−1 + . . . + a1x + a0,
kjer so koeficienti an, an−1, . . . , a1, a0 ∈ R in an 6= 0. Koeficient an imenujemovodilni koeficient, a0 je konstantni clen, n pa je stopnja polinoma. Polinomstopnje nic p(x) = a0, a0 6= 0 je konstantna funkcija. O njej smo govorili ze vpoglavju o linearni funkciji. Polinom prve stopnje p(x) = a1x + a0, a1 6= 0 jelinearna funkcija. Polinom druge stopnje p(x) = a2x
2 + a1x + a0, a2 6= 0 pa jekvadratna funkcija.
Definicijsko obmocje polinoma je mnozica R. Nicle polinoma so resitve enacbep(x) = 0. Polinom stopnje n ima kvecjemu n realnih nicel. Stevilo x0 je k-kratnanicla polinoma p, ce je p(x) = (x − x0)
kq(x) in q(x0) 6= 0. Stevilo k imenujemostopnja nicle x0. Polinom spremeni predznak v niclah lihe stopnje, v niclah sodestopnje pa ne. To pomeni, da graf polinoma v niclah lihe stopnje seka abscisnoos, v niclah sode stopnje pa se je le dotakne. Zacetna vrednost polinoma je a0,kar pomeni, da graf polinoma seka ordinatno os v tocki (0, a0). Dalec stran odizhodisca (x → ±∞) se graf polinoma vede podobno kot vodilni clen anxn, torejgredo vrednosti polinoma proti ∞ ali −∞ odvisno od predznaka vodilnega clenaanx
n.
Zgled 88. Narisimo graf polinoma p(x) = x4 − x3 − x2 + x.
Graf seka ordinatno os v tocki (0, 0), saj je f(0) = 0. Da najdemo nicle polinoma,moramo resiti enacbo
x4 − x3 − x2 + x = 0.
Izraz na levi strani enacaja razstavimo
x(x− 1)2(x + 1) = 0.
Potem je:x1 = 0 nicla 1. stopnje,x2 = 1 nicla 2. stopnje,x3 = −1 nicla 1. stopnje.Nicle nam razdelijo abscisno os na stiri intervale: (−∞,−1), (−1, 0), (0, 1), (1,∞).Na vsakem posameznem intervalu ima funkcija ves cas enak predznak (pozitivna alinegativna). Da bi dolocili predznake polinoma na posameznih intervalih, si moramoizracunati vrednost polinoma v nekem x, ki ni nicla polinoma. Izracunajmo npr.f(2) = 24 − 23 − 22 + 2 = 6 > 0. Ker je 2 ∈ (1,∞), je vrednost polinoma v vsakitocki tega intervala pozitivno stevilo. Ker je x = 1 nicla 2. stopnje, polinom v tejnicli ne spremeni predznaka in ostane na intervalu (0, 1) tudi pozitiven. Ker je x = 0

11.6. POLINOM 147
nicla 1. stopnje, polinom spremeni predznak in je na intervalu (−1, 0) negativen. Kerje x = −1 nicla 1. stopnje, polinom spremeni predznak in je na intervalu (−∞,−1)pozitiven (slika 11.17).
x10 2-1
+++-
(L)(L) (S)
Slika 11.17: Predznak polinoma.
Dalec stran od izhodisca se graf vede kot potencna funkcija f(x) = x4. Torej
x →∞⇒ p(x) →∞in
x → −∞⇒ p(x) →∞.
Namesto, da smo racunali vrednost funkcije v x = 2, bi za dolocitev predznakazadostovala tudi samo ugotovitev o vedenju funkcije dalec stran od izhodisca.
Sedaj lahko narisemo graf polinoma p(x) = x4 − x3 − x2 + x (slika 11.18).
Slika 11.18: Graf polinoma p(x) = x4 − x3 − x2 + x.
11.6.2 Deljenje polinomov in osnovni izrek o deljenju
Osnovni izrek o deljenjuNaj bo p polinom stopnje st(p) = n in q polinom stopnje st(q) = m, kjer je
n > m. Potem obstajata enolicno dolocena polinoma k in r, da velja
p(x) = k(x) · q(x) + r(x),

148 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
kjer je st(k) = n−m in m > st(r) ≥ 0.Polinom k imenujemo kolicnik, polinom r pa ostanek pri deljenju polinoma p spolinomom q.
Zgled 89. Delimo polinom p(x) = 3x4+x3+5x2+3x+1 s polinomom q(x) = x2+1in zapisimo osnovni izrek o deljenju.
Delimo vodilna clena. 3x4 : x2 = 3x2
To bo sedaj prvi clen kvocienta. (3x4 + x3 + 5x2 +3x+1):(x2 + 1)=3x2 + x + 2Pomnozimo polinom q s clenom 3x2. 3x4 + 3x2
Spremenimo predznak. −3x4 − 3x2
Polinomu p pristejemo dobljeni poli-nom.
x3 + 2x2 +3x+ 1
Ponovimo. Ker je x3 : x2 = x, bo todrugi clen kvocienta.Pomnozimo polinom q s clenom x. x3 + xSpremenimo predznake. −x3 − xSestejemo. 2x2 +2x+ 1Postopek ponavljamo. 2x2 + 2
−2x2 − 22x− 1
Ker smo dobili polinom stopnje manjse od 2, se nase deljenje konca, dobljeni poli-nom r(x) = 2x − 1 imenujemo ostanek, polinom k(x) = 3x2 + x + 2 pa kolicnik.Osnovni izrek o deljenju za dana polinoma p in q se glasi:
3x4 + x3 + 5x2 + 3x + 1 = (3x2 + x + 2) · (x2 + 1) + (2x− 1).
11.7 Racionalna funkcija
11.7.1 Definicija in lastnosti
Racionalna funkcija je kvocient dveh polinomov
f(x) =p(x)
q(x)=
anxn + an−1xn−1 + . . . + a1x + a0
bnxn + bn−1xn−1 + . . . + b1x + b0
,
pri cemer polinom q ni nicelni polinom.Racionalna funkcija je definirana povsod razen v niclah imenovalca. Torej
Df = R\{x ∈ R; q(x) = 0}.

11.7. RACIONALNA FUNKCIJA 149
Nicle imenovalca zato imenujemo tudi tocke nedefiniranosti oz. poli. V tehtockah ima funkcija navpicno asimptoto. Ce je pol soda nicla imenovalca, funkcijav polu ne spremeni predznaka (slika11.19). Ce je pol liha nicla imenovalca, funkcijav polu spremeni predznak (slika11.20).
x
xy y
1x
1x
Slika 11.19: Sodi pol.
1x 1x
Slika 11.20: Lihi pol.
Nicle funkcije so tista realna stevila x, za katera velja f(x) = p(x)q(x)
= 0, to
je natanko takrat, ko je stevec p(x) = 0. Nicle racionalne funkcije so torej niclepolinoma v stevcu. Graf racionalne funkcije se v okolici nicel obnasa podobno, kotpri polinomih: v niclah sode stopnje se dotakne abcisne osi, v niclah lihe stopnje pajo seka.
Dalec stran od izhodisca (x −→ ±∞) se graf racionalne funkcije priblizuje nekikrivulji, vendar je nikoli ne doseze. Tej krivulji pravimo asimptota. Vzemimopoljubno racionalno funkcijo
f(x) =anxn + an−1x
n−1 + . . . + a1x + a0
bmxm + bm−1xm−1 + . . . + b1x + b0
in v stevcu in imenovalcu izpostavimo vodilna clena
f(x) =anx
n(1 + an−1xn−1
anxn + . . . + a1xanxn + a0
anxn )
bnxm(1 + bm−1xm−1
bmxm + . . . + b1xbmxm + b0
bmxm ).
Ko gre x −→ ±∞, sta vsoti
an−1
anx+ . . . +
a1
anxn−1+
a0
anxn,

150 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
bm−1
bmx+ . . . +
b1
bmxm−1+
b0
bmxm
zanemarljivo majhni. Recemo lahko, ko gre x −→ ±∞, gre funkcija f(x) −→ anxn
bmxm .Torej se racionalna funkcija dalec stran od izhodisca vede podobno kot kvocientvodilnih clenov. Natancno enacbo asimptote dobimo z deljenjem obeh polinomov,pri cemer dobimo kolicnik k(x) in ostanek r(x). Spomnimo se osnovnega izreka odeljenju polinomov
p(x) = k(x)q(x) + r(x).
Delimo zgornjo enakost s q(x) :
p(x)
q(x)= k(x) +
r(x)
q(x).
Torej lahko racionalno funkcijo zapisemo tudi drugace f(x) = p(x)q(x)
= k(x)+ r(x)q(x)
. Pri
velikih x, je izraz r(x)q(x)
zanemarljivo majhen in je zato enacba asimptote enaka
y = k(x).
Pri iskanju enacbe asimptote locimo tri moznosti.
1. n < mStopnja stevca je manjsa od stopnje imenovalca. Kvocient polinomov p in qje k(x) = 0, zato je enacba asimptote y = 0.
2. n = mStopnja stevca je enaka stopnji imenovalca. Kvocient polinomov p in q jek(x) = an
bn, zato je enacba asimptote kvocient vodilnih koeficientov y = an
bn.
3. n > mStopnja stevca je vecja od stopnje imenovalca. Kvocient polinomov p in q jepolinom k stopnje n−m. Enacba asimptote je enaka y = k(x).
Graf funkcije lahko seka asimptoto in sicer jo seka pri tistih x ∈ R, ki resijoenacbo r(x) = 0. Zacetna vrednost racionalne funkcije je enaka kvocientu kon-stantnih clenov f(0) = a0
b0. Tocka (0, a0
b0) je presecisce grafa funckije z ordinatno
osjo.
Zgled 90. Narisimo graf racionalne funkcije f(x) = x2−2x−22x2−2
.Nicle: resimo enacbo x2 − 2x− 2 = 0.Izracunamo diskriminanto in poiscemo nicli, ki sta: x1 = 1 − √3 in x2 = 1 +
√3,
obe prve stopnje.Poli: resimo enacbo 2x2 − 2 = 0 in dobimo dva pola prve stopnje, ki sta: x1 = 1 in
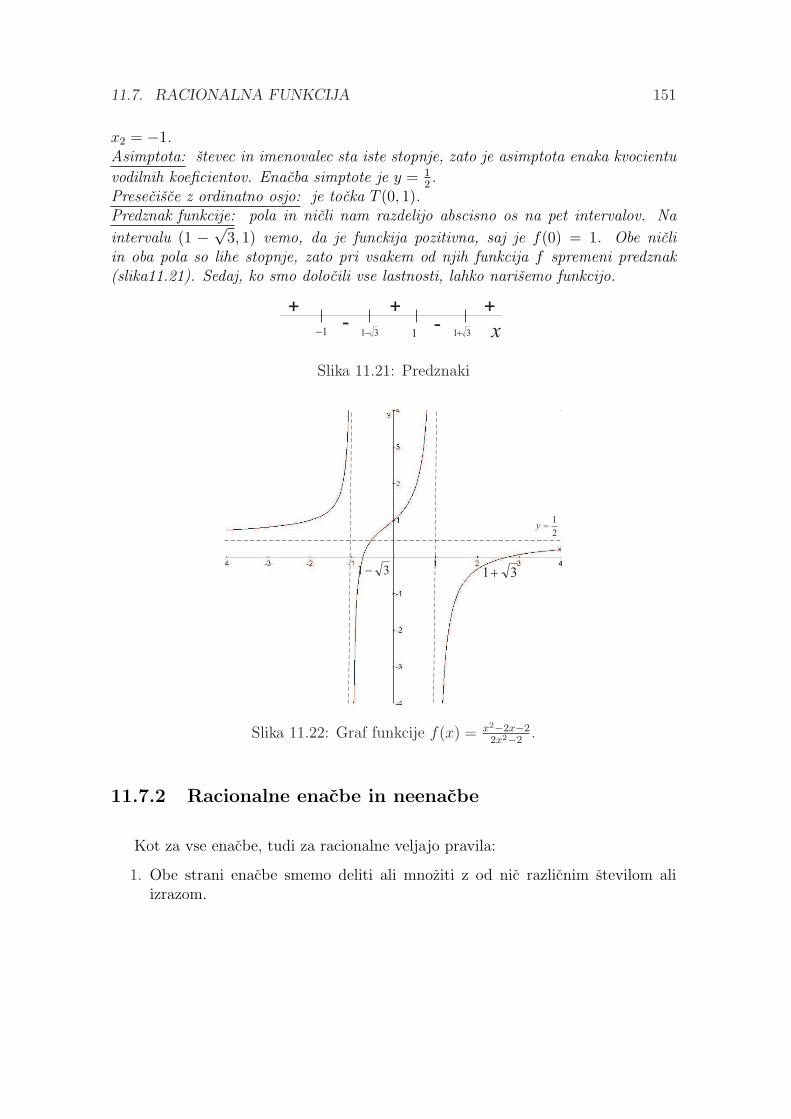
11.7. RACIONALNA FUNKCIJA 151
x2 = −1.Asimptota: stevec in imenovalec sta iste stopnje, zato je asimptota enaka kvocientu
vodilnih koeficientov. Enacba simptote je y = 12.
Presecisce z ordinatno osjo: je tocka T (0, 1).Predznak funkcije: pola in nicli nam razdelijo abscisno os na pet intervalov. Na
intervalu (1 − √3, 1) vemo, da je funckija pozitivna, saj je f(0) = 1. Obe nicli
in oba pola so lihe stopnje, zato pri vsakem od njih funkcija f spremeni predznak(slika11.21). Sedaj, ko smo dolocili vse lastnosti, lahko narisemo funkcijo.
x11- 31- 31+
+
-
+
-
+
Slika 11.21: Predznaki
31- 31+
2
1=y
Slika 11.22: Graf funkcije f(x) = x2−2x−22x2−2
.
11.7.2 Racionalne enacbe in neenacbe
Kot za vse enacbe, tudi za racionalne veljajo pravila:
1. Obe strani enacbe smemo deliti ali mnoziti z od nic razlicnim stevilom aliizrazom.

152 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
2. Na obeh straneh enacbe lahko pristejemo ali odstejemo isto stevilo (izraz).
Resevanje racionalnih enacb si poglejmo na primeru:
Zgled 91. Resimo enacbo (x2−x−2)(2x2−2)
= 2.
Najprej razmislimo, za katera stevila izraz na levi strani ni definiran. Ce bi bilx = 1 ali x = −1, bi v imenovalcu na levi strani enacaja dobili 0. Ce velja x 6= 1in hkrati x 6= −1, potem je (2x2 − 2) neniceln izraz in lahko z njim pomnozimo obestrani enacbe, da se znebimo ulomka. Torej
x2 − x− 2 = 2(2x2 − 2).
Dobimo kvadratno enacbo. Vse clene damo na levo stran
3x2 + x− 2 = 0.
Resitvi te enacbe sta: x1 = −1 in x2 = 23. Na zacetku smo razmislili, da x 6= −1,
zato je resitev le x = 23.
Tudi resevanje racionalnih neenacb si poglejmo na primeru.
Zgled 92. Zanima nas, za katere x-e graf funkcije f(x) = (x2−x−2)(x+2)(x−3)
lezi nad grafom
funkcije g(x) = x + 1.Pri tistem x, kjer graf funkcije f lezi nad grafom funkcije g, zavzame funkcija
f vecjo vrednost od funkcije g. Resiti moramo torej neenacbo f(x) > g(x) oz.(x2−x−2)
(x+2)(x−3)> x + 1. Enacbo si uredimo tako, da damo vse clene na levo stran
neenacaja in levo stran uredimo (damo na skupni imenovalec ter imenovalec in stevecrazstavimo
(x + 1)(x− 1−√5)(x− 1 +√
5)
(x + 2)(3− x)> 0.
Na levi strani smo sedaj dobili novo funkcijo h(x) = (x+1)(x−1−√5)(x−1+√
5)(x+2)(3−x)
. Dolocimonjen predznak.Nicle funkcije h so: x1 = −1, x2 = 1−√5, x3 = 1 +
√5. Vse nicle so lihe stopnje.
Pola funkcije h sta: x1 = −2, x2 = 3. Oba sta lihe stopnje.Izracunajmo h(0) = −2
3in dolocimo predznak funkcije (slika 11.23).
x31-2- 51 - 51 +
+-
+- -
+
Slika 11.23: Predznak funkcije h.
Resitev neenacbe je mnozica tistih x ∈ R, za katere je funcija h(x) > 0, torej jeresitev x ∈ (−∞,−2) ∪ (1−√5,−1) ∪ (3, 1 +
√5).

11.8. EKSPONENTNA IN LOGARITEMSKA FUNKCIJA 153
11.8 Eksponentna in logaritemska funkcija
11.8.1 Definicija in lastnosti eksponentne funkcije
Funkcijo f(x) = ax za a > 0 in a 6= 1 imenujemo eksponentna funkcija, kerima spremenljivko v eksponentu. Za a = 1 dobimo trivialen primer eksponentnefunkcije, to je konstantna funkcija f(x) = 1, zato to moznost izlocimo iz definicijeeksponentne funkcije. Eksponentna funkcija je definirana za vsa realna stevila Df =R. Nicle eksponentne funkcije so resitve enacbe ax = 0. Ta enacba nima resitev,zato eksponentna funkcija nima nicel. Zaloga vrednosti eksponentne funkcije sopozitivna realna stevila Zf = R+, saj je izraz ax > 0, za vsak a > 0 in za vsakx ∈ R. Zacetna vrednost je f(0) = a0 = 1, zato je presecisce grafa eksponentnefunkcije z ordinanto osjo tocka Ty(0, 1).
Ce je a > 1 je funkcija f(x) = ax narascajoca. Dalec stran od izhodisca pa veljanaslednje:
x −→∞⇒ f(x) −→∞ in x −→ −∞⇒ f(x) −→ 0.
Ce je 0 < a < 1 je funkcija f(x) = ax padajoca. Dalec stran od izhodisca pa veljanaslednje:
x −→∞⇒ f(x) −→ 0 in x −→ −∞⇒ f(x) −→∞.
Iz ugotovitev o vedenju funkcije dalec stran od izhodisca sledi, da ima graf ekspo-nentne funkcije vodoravno asimptoto, ki je abscisna os (y = 0).
Zgled 93. Izracunajmo nekaj funkcijskih vrednosti in narisimo grafa funkcij f(x) =2x in g(x) =
(12
)x(slika 11.24).
x −3 −2 −1 0 1 2 3y = f(x) = 2x 1
814
12
1 2 4 8
x −3 −2 −1 0 1 2 3
y = g(x) =(
12
)x8 4 2 1 1
214
18
Graf funkcije f(x) = a−x =(
1a
)xdobimo tako, da graf funkcije f(x) = ax
prezrcalimo cez ordinatno os.

154 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
x x
y y
1 1
1 1
2 2
2 2
3 3
3 3
4 4
7 7
8 8
-1 -1
6 6
-2 -2
5 5
-3 -3
xy 2=
x
y ÷ø
öçè
æ=
2
1
Slika 11.24: Grafa funkcij f(x) = 2x in g(x) =(
12
)x.
11.8.2 Definicija in lastnosti logaritemske funkcije
Logaritemska funkcija f(x) = loga x je inverzna funkcija k eksponentni funkcijif(x) = ax, zato je logaritem definiran takole:
x = loga y ⇐⇒ ax = y, a > 0, a 6= 1.
Ker sta funkciji f(x) = ax in f−1(x) = loga x inverzni velja:
f(f−1(x)) = x =⇒ aloga x = x, x ∈ R+,
f−1(f(x)) = x =⇒ loga ax = x, ∀x ∈ R.
Za racunanje z logaritmi velja se:
a) Logaritem produkta je vsota logaritmov posameznih faktorjev:
loga(x · y) = loga x + loga y.
b) Logaritem kvocienta je logaritem razlike deljenca in delitelja:
loga
(x
y
)= loga x− loga y.
c) Logaritem potence je produkt eksponenta in logaritma osnove:
loga xc = c loga x.
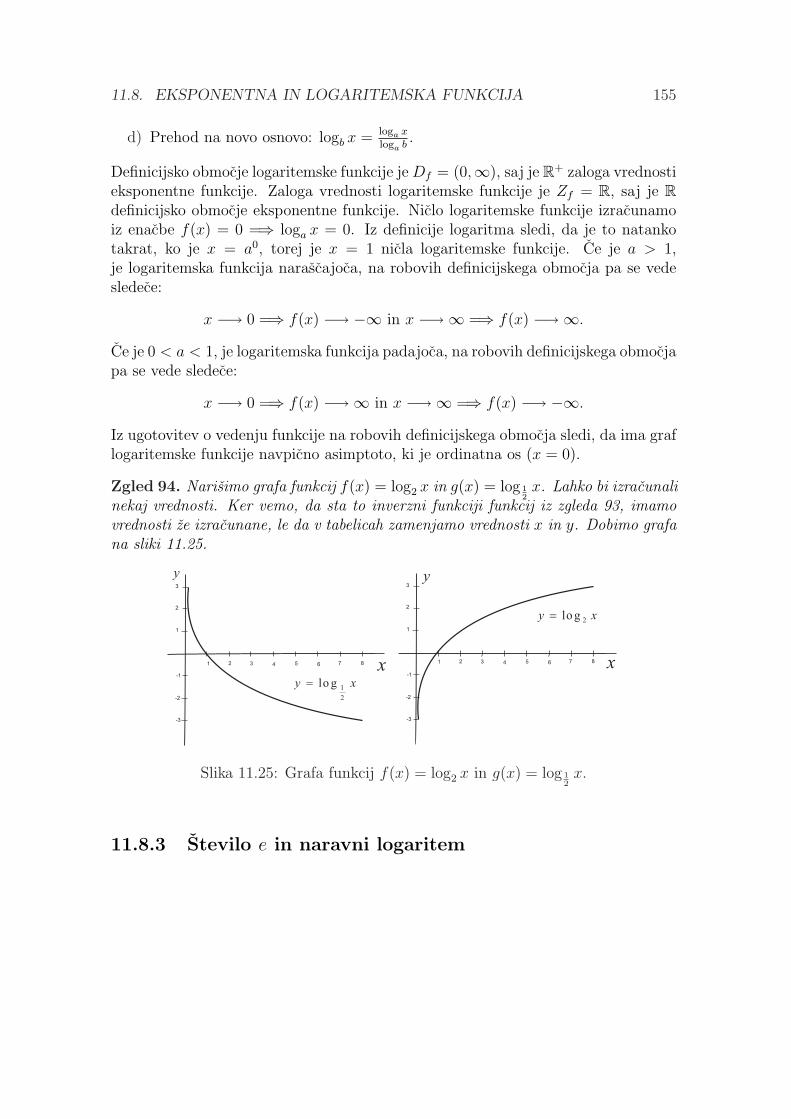
11.8. EKSPONENTNA IN LOGARITEMSKA FUNKCIJA 155
d) Prehod na novo osnovo: logb x = loga xloga b
.
Definicijsko obmocje logaritemske funkcije je Df = (0,∞), saj je R+ zaloga vrednostieksponentne funkcije. Zaloga vrednosti logaritemske funkcije je Zf = R, saj je Rdefinicijsko obmocje eksponentne funkcije. Niclo logaritemske funkcije izracunamoiz enacbe f(x) = 0 =⇒ loga x = 0. Iz definicije logaritma sledi, da je to natankotakrat, ko je x = a0, torej je x = 1 nicla logaritemske funkcije. Ce je a > 1,je logaritemska funkcija narascajoca, na robovih definicijskega obmocja pa se vedesledece:
x −→ 0 =⇒ f(x) −→ −∞ in x −→∞ =⇒ f(x) −→∞.
Ce je 0 < a < 1, je logaritemska funkcija padajoca, na robovih definicijskega obmocjapa se vede sledece:
x −→ 0 =⇒ f(x) −→∞ in x −→∞ =⇒ f(x) −→ −∞.
Iz ugotovitev o vedenju funkcije na robovih definicijskega obmocja sledi, da ima graflogaritemske funkcije navpicno asimptoto, ki je ordinatna os (x = 0).
Zgled 94. Narisimo grafa funkcij f(x) = log2 x in g(x) = log 12x. Lahko bi izracunali
nekaj vrednosti. Ker vemo, da sta to inverzni funkciji funkcij iz zgleda 93, imamovrednosti ze izracunane, le da v tabelicah zamenjamo vrednosti x in y. Dobimo grafana sliki 11.25.
x x
y y
-1 -1
1 1
-2 -2
2 2
-3 -3
3 34 47 78 8
1 1
6 6
2 2
5 5
3 3
xy
2
1lo g=
xy 2lo g=
Slika 11.25: Grafa funkcij f(x) = log2 x in g(x) = log 12x.
11.8.3 Stevilo e in naravni logaritem

156 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
Stevilo e je limita zaporedja
e = limn→∞
(1 +1
n)n
ali vsota vrste
e = 1 +1
1+
1
1 · 2 +1
1 · 2 · 3 +1
1 · 2 · 3 · 4 + . . . =∞∑
n=0
(1
n!).
Stevilo e je iracionalno stevilo, kar pomeni, da nima koncnega decimalnega zapisa(podobno kot stevilo π). Njegov priblizek je e ∼= 2, 7.
Naravni logaritem imenujemo logaritem z osnovo e in ga oznacimo z ln. Naravnilogaritem je inverzna funkcija eksponentne funkcije z osnovo e, to je f(x) = ex. Kersta si funkciji f(x) = ex in g(x) = ln x inverzni, sta njuna grafa simetricna glede nasimetralo lihih kvadratnov (slika 11.26).
xey =
xy ln=si
met
rala
lihih
kvadra
ntov
Slika 11.26: Funkciji f(x) = ex in g(x) = ln x.
11.8.4 Primera uporabe eksponentne funkcije (eksponentnarast)
EkonomijaNa banko vlozimo glavnico (kapital) A, obrestna mera pa znasa p%. Po enem
letu bomo imeli v banki A+A p100
= A(1+ p100
) denarja. Ce se ne dotikamo glavnice inostane obrestna mera nespremenjena, bomo po dveh letih imeli na banki A(1+ p
100)2
denarja in po n letih A(1 + p100
)n denarja.

11.9. TRIGONOMETRICNE FUNKCIJE 157
Zgled 95. Naj bo glavnica A = 1000 EUR, obrestna mera 5%. Po 10 letih bomona banki imeli 1000 · 1, 0510 ∼= 1629 EUR.
Vcasih nas zanima, koliko casa moramo imeti denar na banki, da se bo njegovavrednost podvojila. Resiti moramo enacbo 1000 · 1, 05n = 2000 oz. 1, 05n = 2.To je eksponentna enacba, ki jo resimo s pomocjo logaritmov. Na obeh stranehlogaritmiramo. Ponavadi uporabimo kar logaritem z osnovo 10, ki ga oznacimolog10 = log. Dobimo naslednjo enacbo:
log 1, 05n = log 2.
Upostevamo pravilo o logaritmiranju potence (pravilo c) in dobimo:
n log 1, 05 = log 2.
Izrazimo n: n = log 2log1,05
.S kalkulatorjem izracunamo n ∼= 14, 2. Torej se bo nas kapital podvojil v priblizno14 letih.
Na obrestno obrestovanje, ki je opisano zgoraj lahko gledamo tudi kot na ge-ometrijsko zaporedje, kar je opisano v poglavju Zaporedja.
Razmnozevanje
Kadarkoli imamo opravka s povecanjem ali pomanjsanjem neke populacije nadoloceno casovno obdobje, lahko to opisemo z eksponento funkcijo. Poglejmo sienostaven primer. V prvem letu imamo 10 zrn psenice. Ce vsako od teh zrn vnaslednjem letu rodi 10 novih zrn jih imamo 100, vsako od teh stotih zrn v nasled-njem letu rodi 10 novih in jih imamo 1000 in tako naprej. Rast populacije psenicelahko opisemo s funkcijo f(x) = 10x. Ce za x vzamemo 5, bomo dobili stevilo zrnpsenice po 5 letih.
Pri statistiki obravnavamo trend, ki je v veliko primerih eksponenten in govoriravno o spreminjanju velikosti populacije glede na casovno komponento.
11.9 Trigonometricne funkcije
11.9.1 Radian
Radian je enota za merjenje ravninskih kotov in je definiran kot razmerje med dolzinokroznega loka, ki ga kot doloca, in polmerom (slika 11.27). Kot velikosti en radian
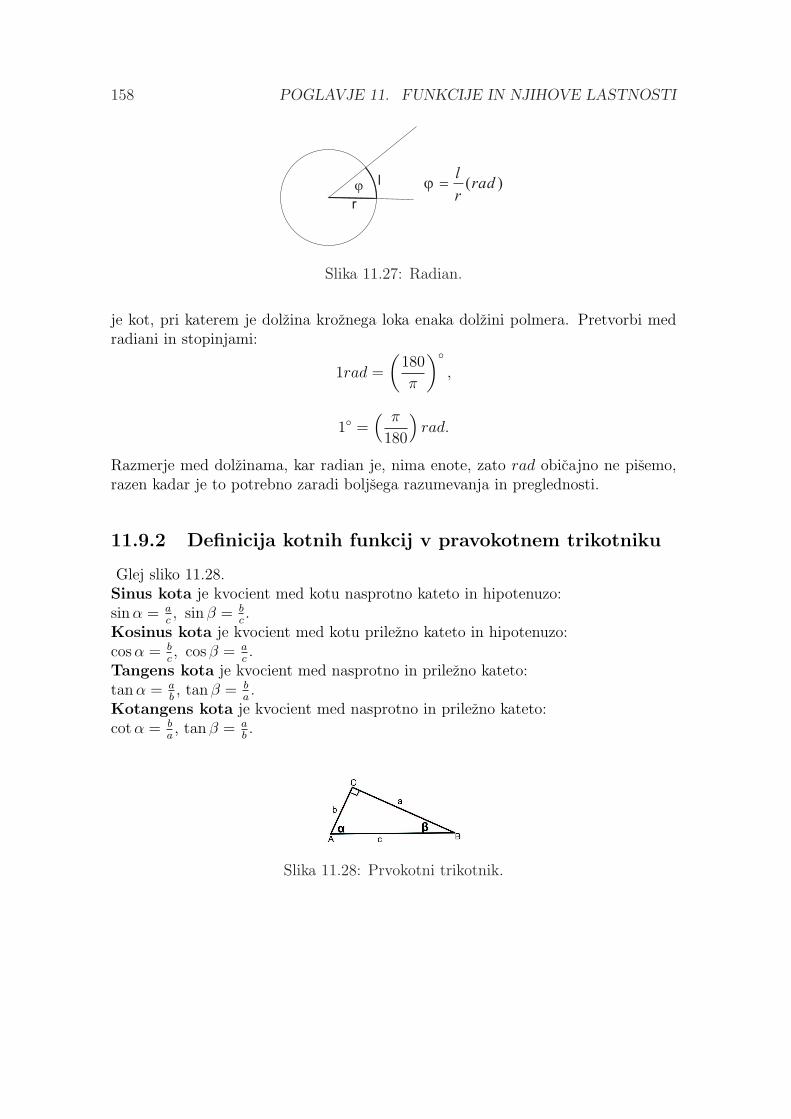
158 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
lj
r
)(radr
l=j
Slika 11.27: Radian.
je kot, pri katerem je dolzina kroznega loka enaka dolzini polmera. Pretvorbi medradiani in stopinjami:
1rad =
(180
π
)◦,
1◦ =( π
180
)rad.
Razmerje med dolzinama, kar radian je, nima enote, zato rad obicajno ne pisemo,razen kadar je to potrebno zaradi boljsega razumevanja in preglednosti.
11.9.2 Definicija kotnih funkcij v pravokotnem trikotniku
Glej sliko 11.28.Sinus kota je kvocient med kotu nasprotno kateto in hipotenuzo:sin α = a
c, sin β = b
c.
Kosinus kota je kvocient med kotu prilezno kateto in hipotenuzo:cos α = b
c, cos β = a
c.
Tangens kota je kvocient med nasprotno in prilezno kateto:tan α = a
b, tan β = b
a.
Kotangens kota je kvocient med nasprotno in prilezno kateto:cot α = b
a, tan β = a
b.
Slika 11.28: Prvokotni trikotnik.
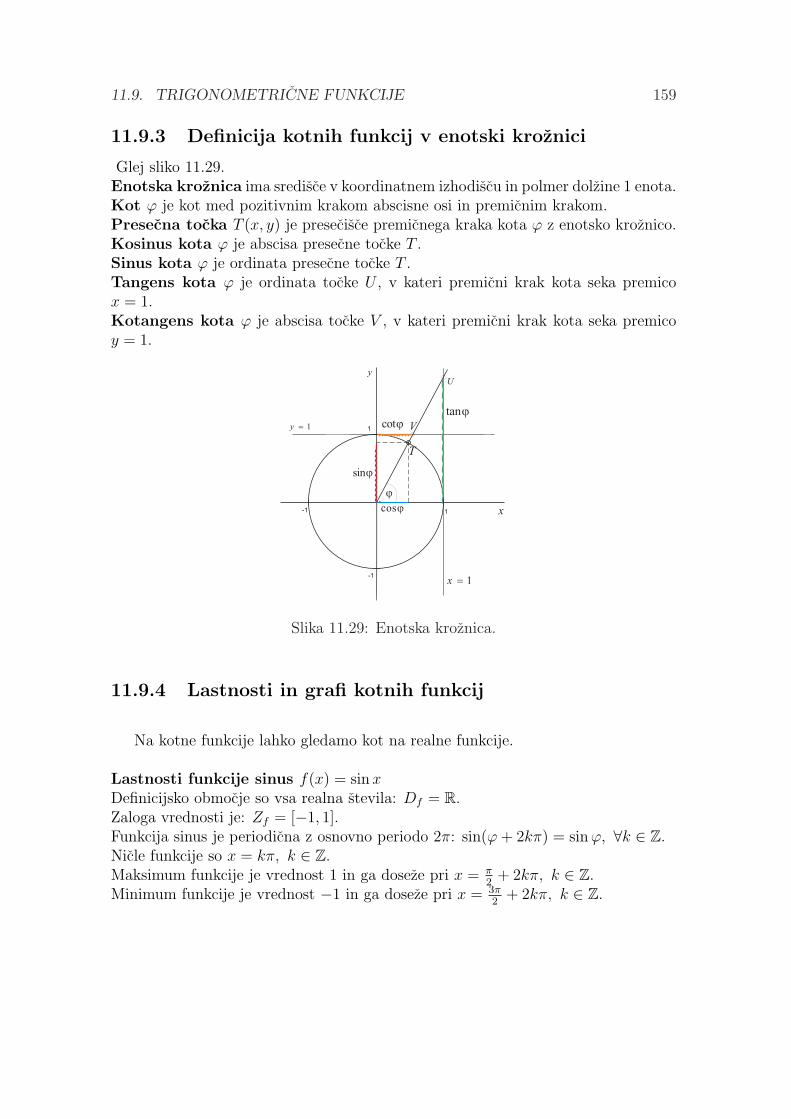
11.9. TRIGONOMETRICNE FUNKCIJE 159
11.9.3 Definicija kotnih funkcij v enotski kroznici
Glej sliko 11.29.Enotska kroznica ima sredisce v koordinatnem izhodiscu in polmer dolzine 1 enota.Kot ϕ je kot med pozitivnim krakom abscisne osi in premicnim krakom.Presecna tocka T (x, y) je presecisce premicnega kraka kota ϕ z enotsko kroznico.Kosinus kota ϕ je abscisa presecne tocke T .Sinus kota ϕ je ordinata presecne tocke T .Tangens kota ϕ je ordinata tocke U , v kateri premicni krak kota seka premicox = 1.Kotangens kota ϕ je abscisa tocke V , v kateri premicni krak kota seka premicoy = 1.
x
y
1
1
-1
-1
j
T
1=x
1=y
U
V
jcos
jsin
jtan
jcot
Slika 11.29: Enotska kroznica.
11.9.4 Lastnosti in grafi kotnih funkcij
Na kotne funkcije lahko gledamo kot na realne funkcije.
Lastnosti funkcije sinus f(x) = sin xDefinicijsko obmocje so vsa realna stevila: Df = R.Zaloga vrednosti je: Zf = [−1, 1].Funkcija sinus je periodicna z osnovno periodo 2π: sin(ϕ + 2kπ) = sin ϕ, ∀k ∈ Z.Nicle funkcije so x = kπ, k ∈ Z.Maksimum funkcije je vrednost 1 in ga doseze pri x = π
2+ 2kπ, k ∈ Z.
Minimum funkcije je vrednost −1 in ga doseze pri x = 3π2
+ 2kπ, k ∈ Z.
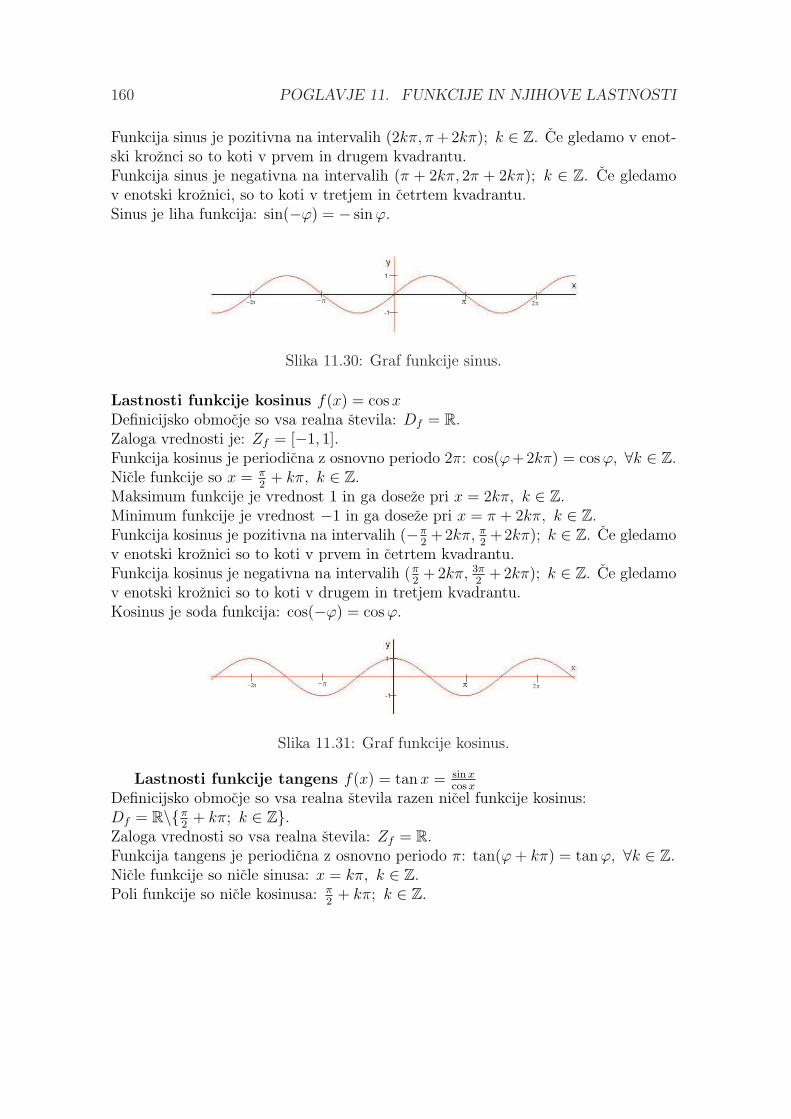
160 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
Funkcija sinus je pozitivna na intervalih (2kπ, π + 2kπ); k ∈ Z. Ce gledamo v enot-ski kroznci so to koti v prvem in drugem kvadrantu.Funkcija sinus je negativna na intervalih (π + 2kπ, 2π + 2kπ); k ∈ Z. Ce gledamov enotski kroznici, so to koti v tretjem in cetrtem kvadrantu.Sinus je liha funkcija: sin(−ϕ) = − sin ϕ.
1
-1
p p2p-
p2-
Slika 11.30: Graf funkcije sinus.
Lastnosti funkcije kosinus f(x) = cos xDefinicijsko obmocje so vsa realna stevila: Df = R.Zaloga vrednosti je: Zf = [−1, 1].Funkcija kosinus je periodicna z osnovno periodo 2π: cos(ϕ+2kπ) = cos ϕ, ∀k ∈ Z.Nicle funkcije so x = π
2+ kπ, k ∈ Z.
Maksimum funkcije je vrednost 1 in ga doseze pri x = 2kπ, k ∈ Z.Minimum funkcije je vrednost −1 in ga doseze pri x = π + 2kπ, k ∈ Z.Funkcija kosinus je pozitivna na intervalih (−π
2+2kπ, π
2+2kπ); k ∈ Z. Ce gledamo
v enotski kroznici so to koti v prvem in cetrtem kvadrantu.Funkcija kosinus je negativna na intervalih (π
2+ 2kπ, 3π
2+ 2kπ); k ∈ Z. Ce gledamo
v enotski kroznici so to koti v drugem in tretjem kvadrantu.Kosinus je soda funkcija: cos(−ϕ) = cos ϕ.
1
-1
p p2p-
p2-
Slika 11.31: Graf funkcije kosinus.
Lastnosti funkcije tangens f(x) = tan x = sin xcos x
Definicijsko obmocje so vsa realna stevila razen nicel funkcije kosinus:Df = R\{π
2+ kπ; k ∈ Z}.
Zaloga vrednosti so vsa realna stevila: Zf = R.Funkcija tangens je periodicna z osnovno periodo π: tan(ϕ + kπ) = tan ϕ, ∀k ∈ Z.Nicle funkcije so nicle sinusa: x = kπ, k ∈ Z.Poli funkcije so nicle kosinusa: π
2+ kπ; k ∈ Z.
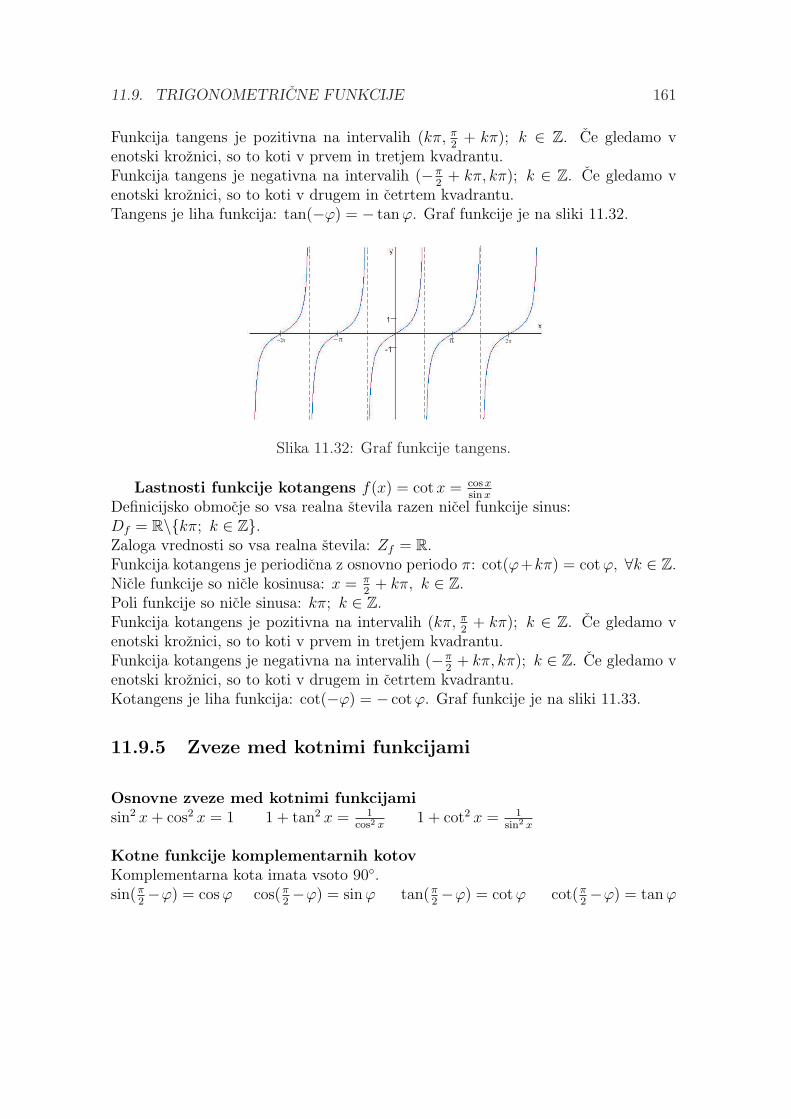
11.9. TRIGONOMETRICNE FUNKCIJE 161
Funkcija tangens je pozitivna na intervalih (kπ, π2
+ kπ); k ∈ Z. Ce gledamo venotski kroznici, so to koti v prvem in tretjem kvadrantu.Funkcija tangens je negativna na intervalih (−π
2+ kπ, kπ); k ∈ Z. Ce gledamo v
enotski kroznici, so to koti v drugem in cetrtem kvadrantu.Tangens je liha funkcija: tan(−ϕ) = − tan ϕ. Graf funkcije je na sliki 11.32.
1
-1
p p2p-p2-
Slika 11.32: Graf funkcije tangens.
Lastnosti funkcije kotangens f(x) = cot x = cos xsin x
Definicijsko obmocje so vsa realna stevila razen nicel funkcije sinus:Df = R\{kπ; k ∈ Z}.Zaloga vrednosti so vsa realna stevila: Zf = R.Funkcija kotangens je periodicna z osnovno periodo π: cot(ϕ+kπ) = cot ϕ, ∀k ∈ Z.Nicle funkcije so nicle kosinusa: x = π
2+ kπ, k ∈ Z.
Poli funkcije so nicle sinusa: kπ; k ∈ Z.Funkcija kotangens je pozitivna na intervalih (kπ, π
2+ kπ); k ∈ Z. Ce gledamo v
enotski kroznici, so to koti v prvem in tretjem kvadrantu.Funkcija kotangens je negativna na intervalih (−π
2+ kπ, kπ); k ∈ Z. Ce gledamo v
enotski kroznici, so to koti v drugem in cetrtem kvadrantu.Kotangens je liha funkcija: cot(−ϕ) = − cot ϕ. Graf funkcije je na sliki 11.33.
11.9.5 Zveze med kotnimi funkcijami
Osnovne zveze med kotnimi funkcijamisin2 x + cos2 x = 1 1 + tan2 x = 1
cos2 x1 + cot2 x = 1
sin2 x
Kotne funkcije komplementarnih kotovKomplementarna kota imata vsoto 90◦.sin(π
2−ϕ) = cos ϕ cos(π
2−ϕ) = sin ϕ tan(π
2−ϕ) = cot ϕ cot(π
2−ϕ) = tan ϕ
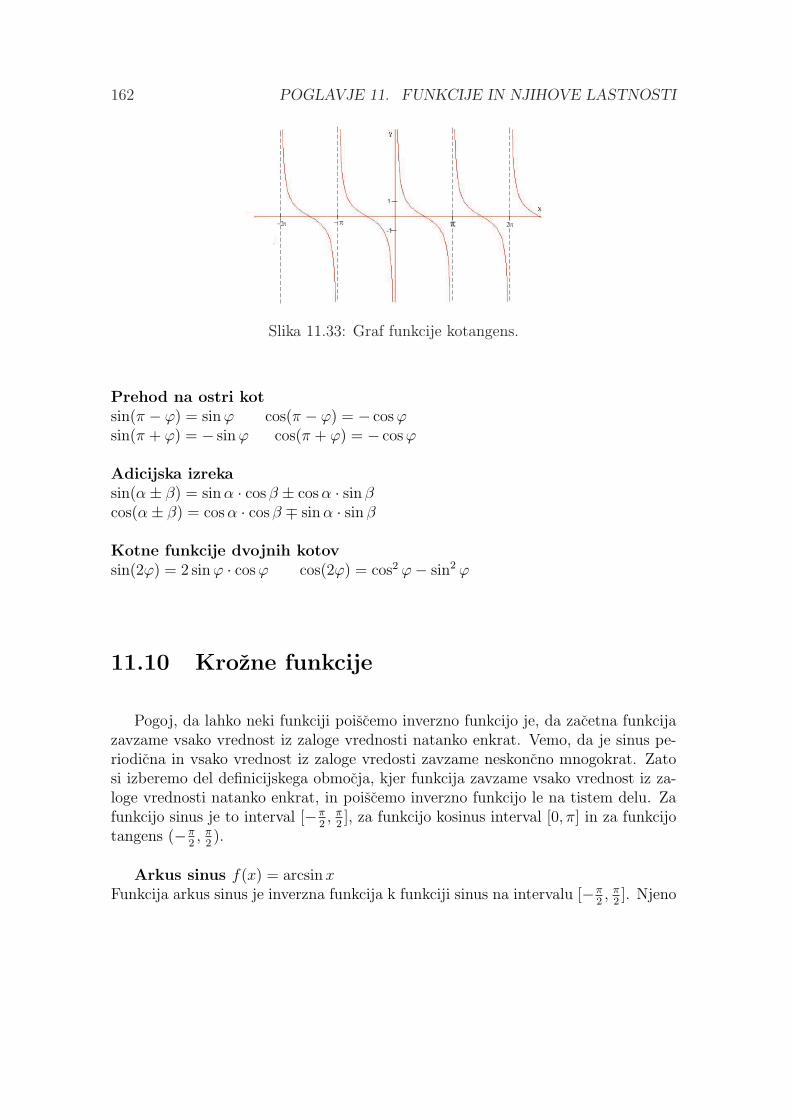
162 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
1
-1
p2p-p2- p
Slika 11.33: Graf funkcije kotangens.
Prehod na ostri kotsin(π − ϕ) = sin ϕ cos(π − ϕ) = − cos ϕsin(π + ϕ) = − sin ϕ cos(π + ϕ) = − cos ϕ
Adicijska izrekasin(α± β) = sin α · cos β ± cos α · sin βcos(α± β) = cos α · cos β ∓ sin α · sin β
Kotne funkcije dvojnih kotovsin(2ϕ) = 2 sin ϕ · cos ϕ cos(2ϕ) = cos2 ϕ− sin2 ϕ
11.10 Krozne funkcije
Pogoj, da lahko neki funkciji poiscemo inverzno funkcijo je, da zacetna funkcijazavzame vsako vrednost iz zaloge vrednosti natanko enkrat. Vemo, da je sinus pe-riodicna in vsako vrednost iz zaloge vredosti zavzame neskoncno mnogokrat. Zatosi izberemo del definicijskega obmocja, kjer funkcija zavzame vsako vrednost iz za-loge vrednosti natanko enkrat, in poiscemo inverzno funkcijo le na tistem delu. Zafunkcijo sinus je to interval [−π
2, π
2], za funkcijo kosinus interval [0, π] in za funkcijo
tangens (−π2, π
2).
Arkus sinus f(x) = arcsin xFunkcija arkus sinus je inverzna funkcija k funkciji sinus na intervalu [−π
2, π
2]. Njeno
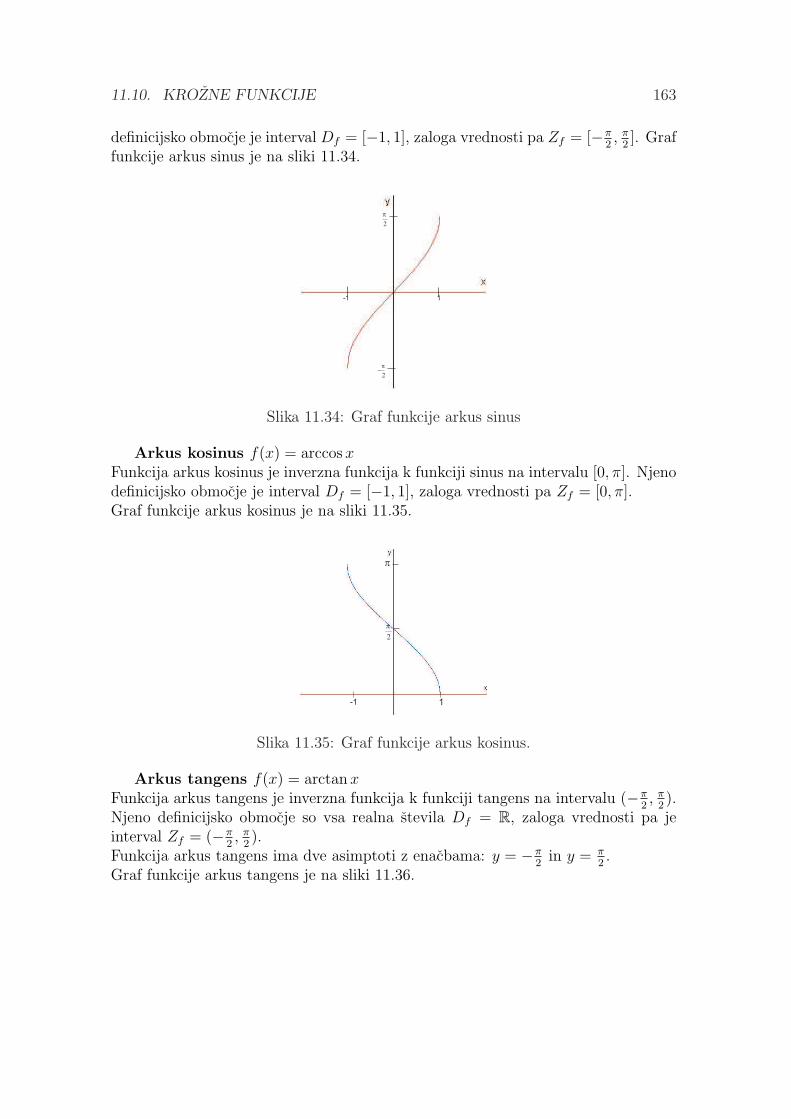
11.10. KROZNE FUNKCIJE 163
definicijsko obmocje je interval Df = [−1, 1], zaloga vrednosti pa Zf = [−π2, π
2]. Graf
funkcije arkus sinus je na sliki 11.34.
1-1
2
p
2
p
-
Slika 11.34: Graf funkcije arkus sinus
Arkus kosinus f(x) = arccos xFunkcija arkus kosinus je inverzna funkcija k funkciji sinus na intervalu [0, π]. Njenodefinicijsko obmocje je interval Df = [−1, 1], zaloga vrednosti pa Zf = [0, π].Graf funkcije arkus kosinus je na sliki 11.35.
1-1
2
p
p
Slika 11.35: Graf funkcije arkus kosinus.
Arkus tangens f(x) = arctan xFunkcija arkus tangens je inverzna funkcija k funkciji tangens na intervalu (−π
2, π
2).
Njeno definicijsko obmocje so vsa realna stevila Df = R, zaloga vrednosti pa jeinterval Zf = (−π
2, π
2).
Funkcija arkus tangens ima dve asimptoti z enacbama: y = −π2
in y = π2.
Graf funkcije arkus tangens je na sliki 11.36.

164 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
2
p
-
2
p
1-1
Slika 11.36: Graf funkcije arkus tangens.
11.11 Naloge s postopki za resevanje
1. Iz grafov na sliki 11.37 preberimo lastnosti funkcij (definicijsko obmocje; zalogavrednosti; nicle; zacetna vrednost; intervale, kjer je funkcija pozitivna/negativna;intervale, kjer funkcija narasca/pada; sodost/lihost funkcije).
x
y
1
1
2
2
3 4-4
-1
-1
-2
-2
-3
-3
a)
x
y
1
1
2 3 4
-1
-1-2-3
b)
x
y
1
1
2
2
3
3
4
-1
-1-2-3
c)
Slika 11.37: Slika k nalogi 1.
Resitev:
a) Stevila na abscisni osi, za katera obstaja graf funkcije, so v definicijskemobmocju. Vidimo, da za −2 in 2 graf funkcije ne obstaja (pravokotnicaskozi −2 ali 2 ne seka grafa funkcije), zato ti dve stevili nista v definicijskemobmocju, vsa ostala pa so. Torej Df = R\{−2, 2}.Zalogo vrednosti iscemo podobno kot definicijsko obmocje, le da tokrat opazu-jemo ordinatno os. Stevila na ordinatni osi, za katera graf funkcije obstaja(pravokotnica skoznje seka graf funkcije) so v zalogi vrednosti, ostala pa ne.Vidimo, da za stevila vecja ali enaka 1 graf funkcije ne obstaja, za druga paobstaja. Torej Zf = (−∞, 1).
Nicle so stevila na abscisni osi, kjer graf funkcije seka x os: x1 = −3, x2 = 3.Zacetna vrednost je stevilo na ordinatni osi, kjer graf funkcije seka os: f(0) =−1.
Intervale pozitivnosti in negativnosti gledamo na abscisni osi. Funkcija je poz-itivna, kjer graf funkcije lezi nad abscisno osjo, in negativna, kjer graf funkcije

11.11. NALOGE S POSTOPKI ZA RESEVANJE 165
lezi pod abscisno osjo. Funkcija je pozitivna na (−∞, 3) ∪ (3,∞). Kadar jeobmocje sestavljeno iz vec intervalov (kot v tem primeru) jih povezemo z op-eracijo ”unija”, saj je interval mnozica. Intervali pozitivnosti in negativnosti sovedno odprti. Funkcija je negativna na (−3, 3)\{2, 2}. Stevili −2 in 2 moramoizlociti, saj zanju funkcija niti ne obstaja. Intervale narascanja in padanjagledamo na abscisni osi (vprasamo se, za katere x funkcija narasca/pada).Funkcija narasca na (−2, 0)∪ (2,∞). Intervali narascanja in padanja so vednoodprti. Funkcija pada na (−∞,−2) ∪ (0, 2).
Funkcija je soda, saj je njen graf simetricen na ordinatno os (ce bi ga prepognilipo ordinatni osi, bi se prekril).
b) Definicijsko obmocje: Df = (−∞,−1) ∪ (1,∞). Puscica na robu grafapomeni, da tocka na katero kaze ni na grafu.Zaloga vrednosti: Zf = [−1, 0) ∪ (0, 1], lahko zapisemo tudi tako: Zf =[−1, 1] \ {0}.Nicel in zacetne vrednosti ni.Funkcija je pozitivna na (1,∞).Funkcija je negativna na (−∞, 1).Funkcija narasca na (−2,−1) ∪ (1, 2).Funkcija pada na (−∞,−2) ∪ (2,∞).Funkcija je liha, saj je simetricna glede na koordinatno izhodisce (ce levi delzavrtimo za 180◦ okoli izhodisca, ravno prekrijemo desni del).
c) Definicijsko obmocje: Df = R\{−2, 1}.Zaloga vrednosti: Zf = R\{0}.Nicel ni.Zacetna vrednost je: f(0) = 1.Funkcija je pozitivna na (−2, 1) ∪ (1,∞).Funkcija je negativna na (−∞,−2).Funkcija narasca na: (−∞,−2) ∪ (−2, 1).Funkcija pada na: (1,∞).Funkcija ni niti soda niti liha.
2. Dana je funkcija f(x) = x2√x+1
. Izracunajmo f( 2x) in 2
f(x).
Resitev: Podana je funkcija f(x) = x2√x+1
. Iscemo pa f( 2x). V predpisu
funkcije f(x) moramo povsod x zamenjati z izrazom 2x. Torej f( 2
x) =
( 2x)2√
2x+1
.

166 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI
Ce se da, dobljeni izraz poenostavimo:
f(2
x) =
4
x2
√2x
+ 1=
4
x√
x2( 2x
+ 1)=
4
x√
x2 2x
+ x2=
4
x√
2x + x2.
Vemo, da je f(x) = x2√x+1
. Iscemo 2f(x)
. Torej namesto f(x) v zadnji izrazvpisemo predpis funkcije f in poenostavimo izraz:
2
f(x)=
2x2√x+1
=2√
x + 1
x2.
3. Poiscimo definicijsko obmocje funkcije f(x) = 2+xx2−1
.
Resitev: Vemo, da racionalna funkcija ni definirana le v polih, to je v niclahimenovalca.
x2 − 1 6= 0(x− 1)(x + 1) 6= 0
x 6= 1x 6= −1
Torej je definicijsko obmocje dane funkcije Df = R\{1,−1}.4. Poiscimo definicijsko obmocje funkcije f(x) =
√x2 − x− 6.
Resitev: Vemo, da so sodi koreni definirani le za nenegativna stevila. Koren-jenec mora biti torej vecji ali enak 0, da bo kvadratni koren definiran.
x2 − x− 6 ≥ 0(x− 3)(x + 2) ≥ 0
Dobili smo kvadratno neenacbo. Resevanje kvadratne neenacbe je opisano vrazdelku 11.4.3. Nicli sta: x1 = −2 in x2 = 3. Vodilni koeficient je: a = 1 > 0,zato je parabola obrnjena navzgor. Pogledamo, kje parabola lezi nad abscisnoosjo. Resitev dobljene neenacbe je enaka definicijskemu obmocju finkcije f :
Df = (−∞,−2] ∪ [3,∞).
5. Dolocimo definicijsko obmocje funkcije g(x) = ln 2x−2√x+3
.
Resitev: V predpisu funkcije nastopajo trije kriticni izrazi:
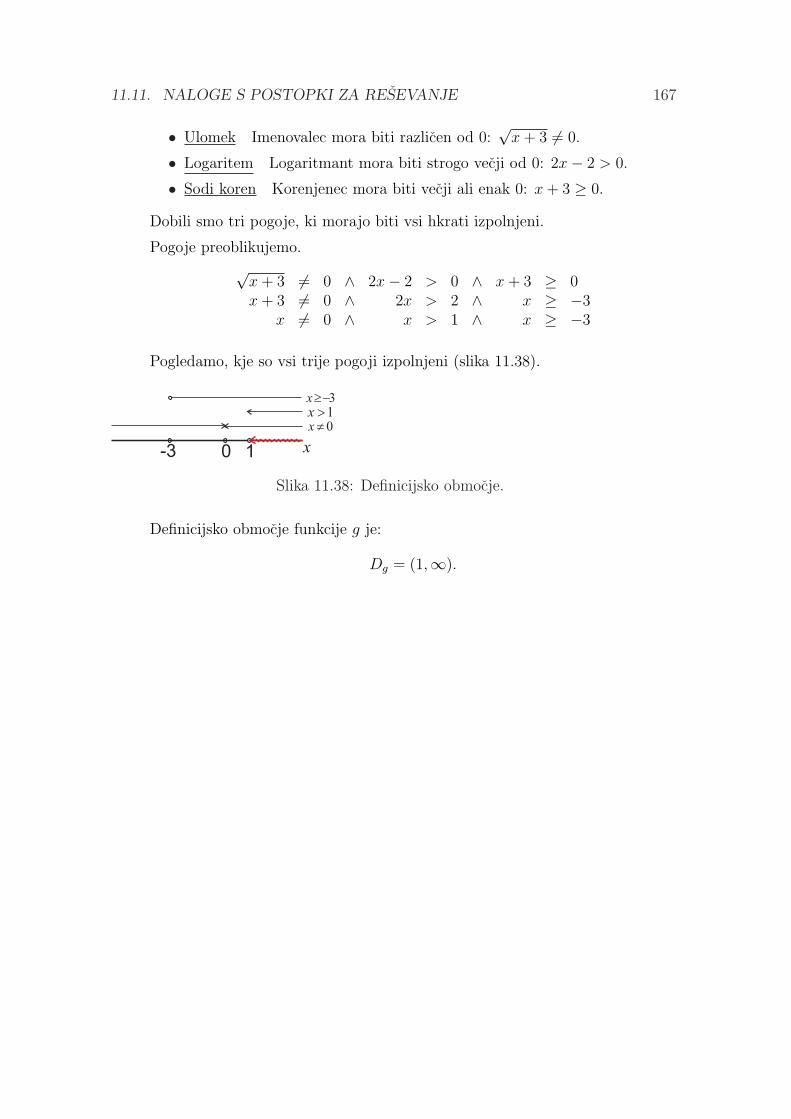
11.11. NALOGE S POSTOPKI ZA RESEVANJE 167
• Ulomek Imenovalec mora biti razlicen od 0:√
x + 3 6= 0.
• Logaritem Logaritmant mora biti strogo vecji od 0: 2x− 2 > 0.
• Sodi koren Korenjenec mora biti vecji ali enak 0: x + 3 ≥ 0.
Dobili smo tri pogoje, ki morajo biti vsi hkrati izpolnjeni.
Pogoje preoblikujemo.
√x + 3 6= 0 ∧ 2x− 2 > 0 ∧ x + 3 ≥ 0x + 3 6= 0 ∧ 2x > 2 ∧ x ≥ −3
x 6= 0 ∧ x > 1 ∧ x ≥ −3
Pogledamo, kje so vsi trije pogoji izpolnjeni (slika 11.38).
x0 1-3
0¹x
1>x
3-³x
Slika 11.38: Definicijsko obmocje.
Definicijsko obmocje funkcije g je:
Dg = (1,∞).

168 POGLAVJE 11. FUNKCIJE IN NJIHOVE LASTNOSTI

Poglavje 12
Odvod
V tem poglavju bomo obravnavali funkcije, ki slikajo iz podmnozice realnih stevil vmnozico realnih stevil, to so realne funkcije.
12.1 Limita in zveznost funkcije
Za lazje razumevanje novega pojma si oglejmo naslednji zgled.
Zgled 96. Vzemimo funkcijo
f(x) = e1
x2 .
Definirana je povsod razen v tocki x = 0. Namrec pri x = 0 izraz − 1x2 ni defini-
ran. Zanima nas, kako so funkcija f obnasa v okolici tocke 0. Vzemimo interval[−0, 5; 0, 5] in izracunajmo vrednost funkcije v nekaterih tockah, glej tabelo 12.1.
x f(x) = e− 1x2
−0, 5 0, 0183−0, 4 0, 0019−0, 2 1, 3888 · 10−11
−0, 1 3, 72 · 10−44
0, 5 0, 01830, 4 0, 00190, 2 1, 3888 · 10−11
0, 1 3, 72 · 10−44
Tabela 12.1: Tabeliranje funkcije f(x) = e1
x2 .
Ce x zavzame vrednosti, ki so z leve ali desne strani dovolj blizu tocke 0, tedajse vrednosti funkcije f(x) blizajo tocki 0. Opazimo tudi, da funkcija vrednosti 0 ne
169
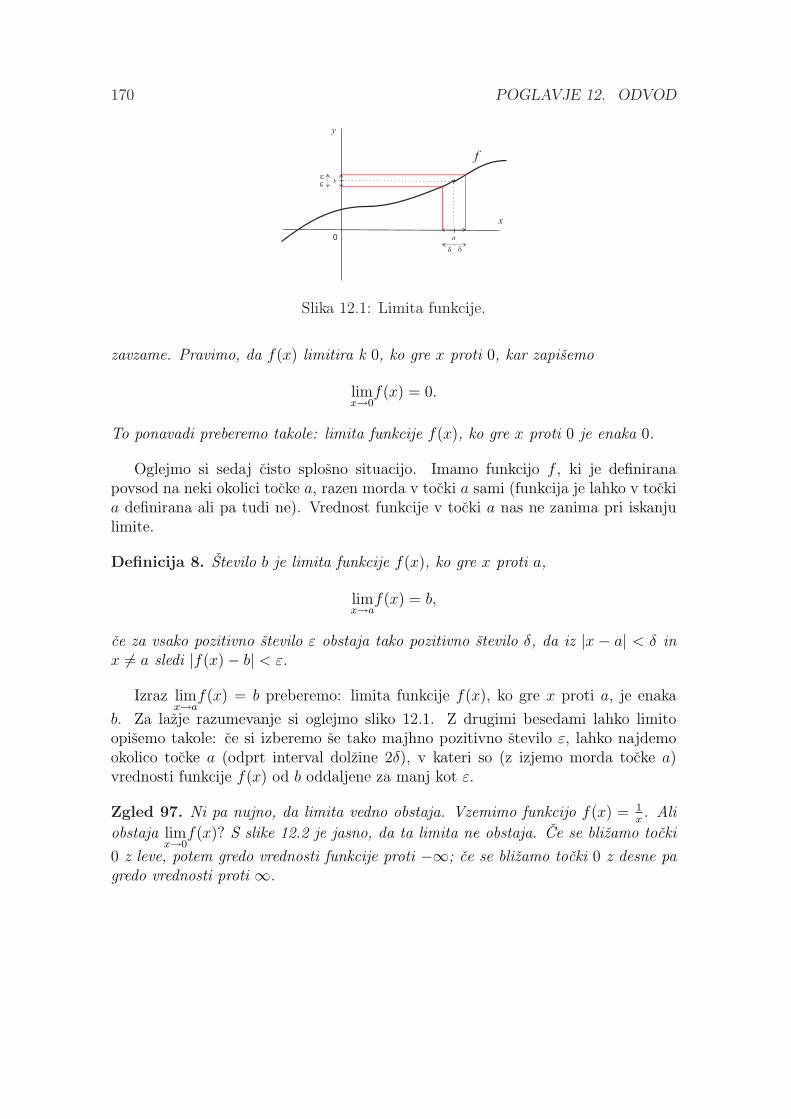
170 POGLAVJE 12. ODVOD
Slika 12.1: Limita funkcije.
zavzame. Pravimo, da f(x) limitira k 0, ko gre x proti 0, kar zapisemo
limx→0
f(x) = 0.
To ponavadi preberemo takole: limita funkcije f(x), ko gre x proti 0 je enaka 0.
Oglejmo si sedaj cisto splosno situacijo. Imamo funkcijo f , ki je definiranapovsod na neki okolici tocke a, razen morda v tocki a sami (funkcija je lahko v tockia definirana ali pa tudi ne). Vrednost funkcije v tocki a nas ne zanima pri iskanjulimite.
Definicija 8. Stevilo b je limita funkcije f(x), ko gre x proti a,
limx→a
f(x) = b,
ce za vsako pozitivno stevilo ε obstaja tako pozitivno stevilo δ, da iz |x − a| < δ inx 6= a sledi |f(x)− b| < ε.
Izraz limx→a
f(x) = b preberemo: limita funkcije f(x), ko gre x proti a, je enaka
b. Za lazje razumevanje si oglejmo sliko 12.1. Z drugimi besedami lahko limitoopisemo takole: ce si izberemo se tako majhno pozitivno stevilo ε, lahko najdemookolico tocke a (odprt interval dolzine 2δ), v kateri so (z izjemo morda tocke a)vrednosti funkcije f(x) od b oddaljene za manj kot ε.
Zgled 97. Ni pa nujno, da limita vedno obstaja. Vzemimo funkcijo f(x) = 1x. Ali
obstaja limx→0
f(x)? S slike 12.2 je jasno, da ta limita ne obstaja. Ce se blizamo tocki
0 z leve, potem gredo vrednosti funkcije proti −∞; ce se blizamo tocki 0 z desne pagredo vrednosti proti ∞.

12.2. DEFINICIJA ODVODA 171
Slika 12.2: Primer funkcije, ki nima limite.
Definicija 9. Naj bo funkcija f definirana na okolici tocke a. Funkcija je zvezna vtocki a, ce za vsako pozitivno stevilo ε obstaja tako pozitivno stevilo δ, da iz |x−a| < δsledi |f(x)− f(a)| < ε.
Funkcija f je zvezna v tocki a, ce je njen graf v tej tocki nepretrgan. Nepretrganostgrafa pomeni, da je funkcija v tocki a definirana in da je limita funkcije v tocki aenaka funkcijski vrednosti f(a), to je
limx→a
f(x) = f(a).
Funkcija je zvezna na mnozici X, ce je zvezna v vsaki njeni tocki. Ce je funkcijazvezna v vsaki tocki definicijskega obmocja, pravimo, da je zvezna. Funkcija izprimera 97 ni zvezna v tocki x = 0, saj v tej tocki ni niti definirana.
12.2 Definicija odvoda
Funkcija f naj bo definirana na zaprtem intervalu [a, b]. Izberimo si tocko x0 ∈ [a, b].Naj bo h majhno od nic razlicno stevilo tako, da je tudi tocka x0 + h ∈ [a, b].Vzemimo izraz
f(x0 + h)− f(x0)
h,
ki ga imenujemo diferencni kolicnik funkcije v tocki x0. Ta izraz je odvisen od h.Kaksna je vloga diferencnega kolicnika? Na sliki 12.3 smo tocko z abciso x0 oznacili zA in z B tocko, ki ima abciso x0+h. To sta tocki A(x0, f(x0)) in B(x0+h, f(x0+h)).

172 POGLAVJE 12. ODVOD
Skozi ti dve tocki napeljimo premico, ki jo imenujemo sekanta funkcije f . Zapisimosmerni koeficient premice skozi ti dve tocki
f(x0 + h)− f(x0)
(x0 + h)− x0
.
Opazimo, da je smerni koeficient sekante ravno enak diferencnemu kolicniku.
Definicija 10. Odvod funkcije f(x) v tocki x0 je enak limiti
f ′(x0) = limh→0
f(x0 + h)− f(x0)
(x0 + h)− x0
.
Funkcija je v tocki x0 odvedljiva, ce obstaja limita diferencnega kolicnika. Ce jefunkcija odvedljiva v vsaki tocki definicijskega obmocja, tedaj pravimo, da je funkcijaodvedljiva.
Zgled 98. Vzemimo funkcijo f(x) = x3 in izberimo za tocko x0 = 2. Diferencnikolicnik za funkcijo f v tocki 2 je
f(2 + h)− f(2)
h=
(2 + h)3 − 8
h=
h3 + 6h2 + 12h + 8− 8
h= h2 + 6h + 12.
Odvod v tocki 2 jef ′(2) = lim
h→0(h2 + 6h + 12) = 12.
Zgled 99. Vzemimo funkcijo f(x) = x2 in pokazimo, da je funkcija odvedljiva naceli realni osi. Naj bo x poljubno realno stevilo, pokazimo, da obstaja limita
limh→0
f(x + h)− f(x)
h= lim
h→0
(x + h)2 − x2
h= lim
h→0
x2 + 2xh + h2 − x2
h=
= limh→0
(2x + h) = 2x.
Pokazali smo, da je funkcija odvedljiva. Njen odvod je
f ′(x) = 2x.
Zgled 100. Ali je funkcija f(x) = |x| odvedljiva v tocki x = 0?Ker je
limh↑0
f(x + h)− f(x)
h= lim
h↑0f(0 + h)− f(0)
h= lim
h↑0|0 + h| − |0|
h= lim
h↑0−h
h= −1
in
limh↓0
f(x + h)− f(x)
h= lim
h↓0f(0 + h)− f(0)
h= lim
h↓0|0 + h| − |0|
h= lim
h↓0h
h= 1,
zato limh→0
f(0+h)−f(0)h
ne obstaja, obstajala pa je leva (limh↑0
) in desna limita (limh↓0
).

12.2. DEFINICIJA ODVODA 173
Slika 12.3: Diferencni kolicnik.
Slika 12.4: Primer funkcije, ki ni odvedljiva.

174 POGLAVJE 12. ODVOD
Slika 12.5: V limitnem postopku sekante preidejo v tangento.
Neposredno iz definicije sledi, da je neka funkcija odvedljiva v tocki x natankotedaj, ko je v tej tocki odvedljiva z leve in z desne strani in sta levi in desni odvodenaka. Torej funkcija v tocki 0 ni odvedljiva. Je pa ta funkcija zvezna, kar pomeni,da lahko iz tega primera vidimo, da ni vsaka zvezna funkcija tudi odvedljiva.
12.3 Geometricni pomen odvoda
Kot smo ze povedali je diferencni kolicnik smerni koeficient sekante skozi tockiA(x0, f(x0)) in B(x0 + h, f(x0 + h)). Ko se s stevilom h priblizujemo vrednosti0, se tocka B bliza tocki A (glej sliko 12.5). V limitni legi sekanto skozi tocko Aimenujemo tangenta na krivuljo. Torej, smerni koeficient sekante preide v smernikoeficient tangente. Zapisimo geometricni pomen odvoda:
Definicija 11. Odvod funkcije f ′(x) je enak tangensu kota, ki ga oklepa tangenta vtocki x na ustrezno krivuljo s pozitivno smerjo abcisne osi (glej sliko 12.6).
Ce je funkcija v tocki x0 odvedljiva, tedaj obstaja tangenta na graf funkcije f ,ki ima smerni koeficient enak f ′(x0) = tan ϕ. Zapisimo se enacbo tangente na graffunkcije v tej tocki:
y − f(x0) = f ′(x0)(x− x0).
Odvod je dober pripomocek pri raziskovanju funkcij oziroma pripadajocih grafov.Spomnimo se: ce je smerni koeficient negativen, potem linearna funkcija pada.Ce je smerni koeficient pozitiven, pa linearna funkcija narasca. Poglejmo si obamejna primera. Ce je smerni koeficient enak 0, tedaj je linearna funkcija konstantnain je graf vzporeden abcisni osi. Navpicna premica, pa ni graf nobene linearnefunkcije. Sedaj bomo ta spoznanja povezali z odvodom in dobili splosne ugotovitve

12.4. PRAVILA ZA ODVAJANJE 175
Slika 12.6: Geometrijski pomen odvoda.
za poljubne funkcije. Velja: ce je f ′(x) > 0, funkcija f v tocki x narasca. Ce pa jef ′(x) < 0, funkcija f v tocki x pada. Preden bomo te ugotovitve dejansko uporabilina konkretnih primerih, moramo povedati se pravila za odvajanje funkcij.
12.4 Pravila za odvajanje
Odvod funkcije f izracunamo tako, da izracunamo limito ustreznega diferencnegakolicnika (glej zgled 99). Z pravkar omenjenim postopkom izpeljemo naslednja prav-ila, pri cemer je k konstanta. Funkciji f in g pa sta odvedljivi.
(k)′ = 0 odvod konstante(k · f(x))′ = k · f ′(x) (odvod produkta funkcije s konstanto)(f(x) + g(x))′ = f ′(x) + g′(x) (odvod vsote dveh funkcij)(f(x)− g(x))′ = f ′(x)− g′(x) (odvod razlike dveh funkcij)(f(x) · g(x))′ = f ′(x) · g(x) + f(x) · g′(x) (odvod produkta funkcije s konstanto)
(f(x)g(x)
)′ = f ′(x)g(x)−f(x)g′(x)(g(x))2
(odvod kolicnika dveh funkcij)
Tabela 12.2: Pravila za odvajanje funkcij.
S pomocjo teh pravil in definicije odvoda lahko dokazemo tudi odvode elemen-tarnih funkcij (tabela 12.3.).
Naredimo nekaj zgledov.
Zgled 101. Izracunajmo odvod funkcije f(x) = 4x2. Po pravilu za odvajanje pro-dukta funkcije s konstanto je f ′(x) = 4(x2)′. Odvod potence (x2)′ = 2x, zato jef ′(x) = 4(2x) = 8x.

176 POGLAVJE 12. ODVOD
(xn)′ = nxn−1
(ax)′ = ax ln a(ex)′ = ex
(loga x)′ = 1x
loga e(ln x)′ = 1
x
(sin x)′ = cos x(cos x)′ = − sin x(tan x)′ = 1
cos2 x
(cot x)′ = − 1sin2 x
Tabela 12.3: Tabela odvodov nekaterih elementarnih funkcij.
Zgled 102. Odvajajmo funkcijo f(x) = (x3 + 2x− 5). Najprej uporabilo pravilo zaodvod vsote funkcij. Omenimo, da ocitno pravilo velja tudi za vsoto (razliko) vecihfunkcij. Dobimo
f ′(x) = (x3)′ + (2x)′ − (5)′.
Za odvod prvega clena uporabimo pravilo za odvod potence (x3)′ = 3x2 (glej zgled101), odvod (2x)′ = (2x1)′ = 2 · 1x0 = 2 in odvod konstante je 0, kar nam da
f ′(x) = 3x2 + 2.
Zgled 103. Naj bo f(x) = sin x cos x, tedaj je po pravilu za odvod produkta funkcijf ′(x) = (sin x)′ cos x + sin x(cos x)′. Sedaj uporabimo pravili za odvod obeh elemen-tarnih funkcij in dobimo
f ′(x) = cos x cos x + sin x(− sin x) = cos2 x− sin2 x.
Zgled 104. Naj bo f(x) = x2−1x2+1
. Potem je po pravilu za odvod kolicnika dveh funkcij
f ′(x) =(x2 − 1)′(x2 + 1)− (x2 − 1)(x2 + 1)′
(x2 + 1)2=
2x(x2 + 1)− (x2 − 1)2x
(x2 + 1)2=
4x
(x2 + 1)2.
Imejmo sestavljeno funkcijo (g ◦ f)(x) = g(f(x)) in naj bosta f(x) = u in g(u)odvedljivi funkciji. Potem je tudi sestavljena funkcija g ◦ f odvedljiva in velja
(g ◦ f)′(x) = g′(f(x))f ′(x)(odvod sestavljene funkcije).
Zgled 105. Odvajajmo funkcijo h(x) = (x + 2)3. Funkcijo h lahko sestavimo izdveh funkcij f(x) = x + 2 = u in g(f(x)) = g(u) = u5, torej je h(x) = g(f(x)).Izracunajmo f ′(x) = 1 in g′(f(x)) = g′(u) = 5u4 = 5(x + 2)4. Po zgornjem praviluje
h′(x) = g′(f(x))f ′(x) = 5(x + 2)4.

12.5. L’HOSPITALOVO PRAVILO 177
Za konec razdelka si oglejmo se primer uporabe geometrijskega pomena odvoda.
Zgled 106. Dolocimo tangento na krivuljo y = x3 + x− 4 v tocki x = 2.Izracunajmo najprej odvod y′ = 3x2 + 1. Tangenta na krivuljo v tocki x = 2 ima
smerni koeficient kt = y′(2) = 13. Ce je y = x3 + x− 4, je y(2) = 6. Tocka v kateriracunamo tangento je torej (2,6). Enacba tangente je
y − 6 = 13(x− 2)
aliy = 13x− 20.
12.5 L’Hospitalovo pravilo
V razdelku limita funkcije smo povedali, da je funkcija f(x) v tocki x0 zvezna, ce je
limx→x0
f(x) = f(x0).
Lahko pa se zgodi, da ima funkcija v neki tocki limito, ki pa ni enaka funkcijskivrednosti npr.
limx→0
sin x
x= 1.
Omenjeno limito bomo razresili z L’Hospitalovim pravilom. Ce v funkcijo f(x) =sin x
xvstavimo x = 0, dobimo f(0) = 0
0. Tocko x0 imenujemo tocka nedolocenosti,
ce iz funkcijskega zapisa f(x) dobimo enega izmed rezultatov
0
0,∞∞ ,∞−∞, 0 · ∞, 00,∞0, 1∞,
sicer je pa funkcija pa je v okolici tocke x0 definirana.Zapisimo L’Hospitalovo pravilo. Naj bosta f(x) in g(x) funkciji, ki sta v okolici
tocke x0 zvezno odvedljivi (funkcija je odvedljiva in odvod je zvezna funkcija) in najbo lim
x→x0
f(x) = limx→x0
g(x) = 0 ter g′(x0) 6= 0. Tedaj, ce obstaja
limx→x0
f ′(x)
g′(x),
obstaja tudi
limx→x0
f(x)
g(x)
in velja
limx→x0
f(x)
g(x)= lim
x→x0
f ′(x)
g′(x).

178 POGLAVJE 12. ODVOD
V primeru, da je tudi limx→x0
f ′(x) = limx→x0
g′(x) = 0, tedaj postopek ponovimo, ce sta
funkciji zvezno odvedljivi na okolici tocke x0. V primeru, ko pa je g′(x0) = 0 in jef ′(x0) 6= 0, je
limx→x0
f(x)
g(x)= ∞.
Pravilo velja ob analognih predpostavkah tudi za primer, ko je limx→x0
f(x) = limx→x0
g(x) =
∞. Ostali primeri nedolocenih izrazov pa se prevedejo na ta dva (00
in ∞∞) s prepros-
timi preureditvami.
Zgled 107. Izracunajmo sedaj
limx→0
sin x
x= lim
x→0
cos x
1=
1
1= 1.
12.6 Ekstremi funkcij
Naj bo funkcija f(x) odvedljiva, tedaj lahko izracunamo f ′(x), ki je spet funkcijaspremenljivke x. Ce je f ′(x) odvedljiva funkcija, lahko s ponovnim odvajanjemdobimo drugi odvod, ki ga oznacimo
(f ′(x))′ = f ′′(x).
Ce je tudi drugi odvod odvedljiva funkcija, dobimo s ponovnim odvajanjem tretjiodvod, ki ga oznacimo f ′′′(x). Ce se da funkcija n-krat zaporedoma odvajati,dobimo po n korakih n-ti odvod funkcije f , ki ga oznacimo z f (n)(x).
Zgled 108. Funkcija f(x) = x3 ima prvi odvod f ′(x) = 3x2, drugi odvod f ′′(x) = 6x,tretji odvod f ′′′(x) = 6 in f (n)(x) = 0 za n ≥ 4.
Visji odvodi so odlicno orodje za iskanje ekstremov funkcij. Ekstrem je lahkomaksimum ali pa minimum. Za boljse razumevanje si narisimo poljubno funkcijo(glej sliko 12.7). Iz slike ni tezko razbrati najmanjse in najvecje vrednosti funkcije.Funkcija doseze minimalno vrednost v tocki, ki ima abciso a in maksimalno vrednostv tocki, ki ima abciso b. Ce bi se omejili na manjse intervale, npr. na interval (-3,-1), tedaj funkcija v tocki A tudi doseze maksimalno vrednost. V matematiki zatogovorimo o lokalnih in globalnih ekstremih. Zapisimo definicije:
Definicija 12. Funkcija f ima v tocki x0 lokalni minimum, ce obstaja okolica Utocke x0, da je
f(x) > f(x0) za vsak x ∈ U .

12.6. EKSTREMI FUNKCIJ 179
Slika 12.7: Globalni in lokalni ekstremi.
Definicija 13. Funkcija f ima v tocki x0 lokalni maksimum, ce obstaja okolicaU tocke x0, da je
f(x) < f(x0) za vsak x ∈ U .
Definicija 14. Globalni maksimum oziroma najvecja funkcijska vrednost funkcijef na intervalu [a, b] je v tocki x0, ce je
f(x) < f(x0) za vsak x ∈ [a, b].
Definicija 15. Globalni minimum oziroma najmanjsa funkcijska vrednost funkcijef na intervalu [a, b] je v tocki x0, ce je
f(x) > f(x0) za vsak x ∈ [a, b].
Ce je funkcija f zvezna na intervalu [a, b], tedaj zavzame globalni minimumv katerem od krajisc intervala [a, b] ali pa v kaki tocki lokalnega minimuma. Inpodobno, ce je funkcija f zvezna na intervalu [a, b], tedaj zavzame globalni maksi-mum v katerem od krajisc intervala [a, b] ali pa v kaki tocki lokalnega maksimuma.
Ce ima odvedljiva funkcija f v tocki x0 lokalni ekstrem, je f ′(x0) = 0 (Fermatovizrek). Poglejmo si se geometricno interpretacijo. Tam, kjer ima krivulja najvisjoali najnizjo tocko, je tangenta vzporedna z abcisno osjo, njen smerni koeficient jeenak nic. Ker pa je smerni koeficient enak vrednosti odvoda v tisti tocki, je odvodenak nic.
Ne velja pa obratno, to pomeni, da iz f ′(x0) = 0 ne sledi nujno, da ima funkcijav tocki x0 ekstrem. Torej, nicla odvoda ni nujno ekstremna tocka. Niclam prvegaodvoda bomo rekli stacionarne tocke. Oglejmo si naslednji zgled.

180 POGLAVJE 12. ODVOD
Slika 12.8: Primer funkcije, ki nima ekstrema.
Zgled 109. Vzemimo funkcijo f(x) = x3. Odvod f ′(x) = 3x2 ima vrednost 0 v tockix0 = 0. V tocki (0,0) pa funkcija nima ekstrema (glej sliko 12.8).
Kako poiscemo lokalne ekstreme? Za dolocanje ekstremov funkcije bodo pomem-bni visji odvodi. Zapisimo splosno pravilo: Naj bo funkcija f (n)-krat zveznoodvedljiva. Na bo f ′(x0) = f ′′(x0) = f ′′′(x0) = . . . = f (n−1)(x0) = 0 in f (n)(x0) 6= 0.Potem velja:
1. ce je n sodo stevilo in f (n)(x0) < 0, tedaj ima f v x0 lokalni maksimum.
2. ce je n sodo stevilo in f (n)(x0) > 0, tedaj ima f v x0 lokalni minimum.
3. ce je n liho stevilo in f (n)(x0) 6= 0, tedaj ima f v x0 nima ekstrema.
Mi bomo v vecini primerov uporabljali naslednjo pravilo.Naj bo funkcija f odvedljiva in naj bo prvi odvod v tocki x = x0 enak nic
f ′(x0) = 0. Potem velja:
1. ce je drugi odvod v tocki x = x0 negativen f ′′(x0) < 0, tedaj ima f v x0 lokalnimaksimum.
2. ce je drugi odvod v tocki x = x0 pozitiven f ′′(x0) > 0, tedaj ima f v x0 lokalniminimum.
3. ce je drugi odvod v tocki x = x0 enak nic f ′′(x0) = 0 in je tretji odvod v tockix = x0 razlicen od nic f ′′′(x0) 6= 0, tedaj ima f v x0 prevoj.
Iskanje ekstrema si velikokrat olajsamo tako, da opazujemo predznak odvoda f ′(x)na dovolj majhni okolici tocke x0. Velja:
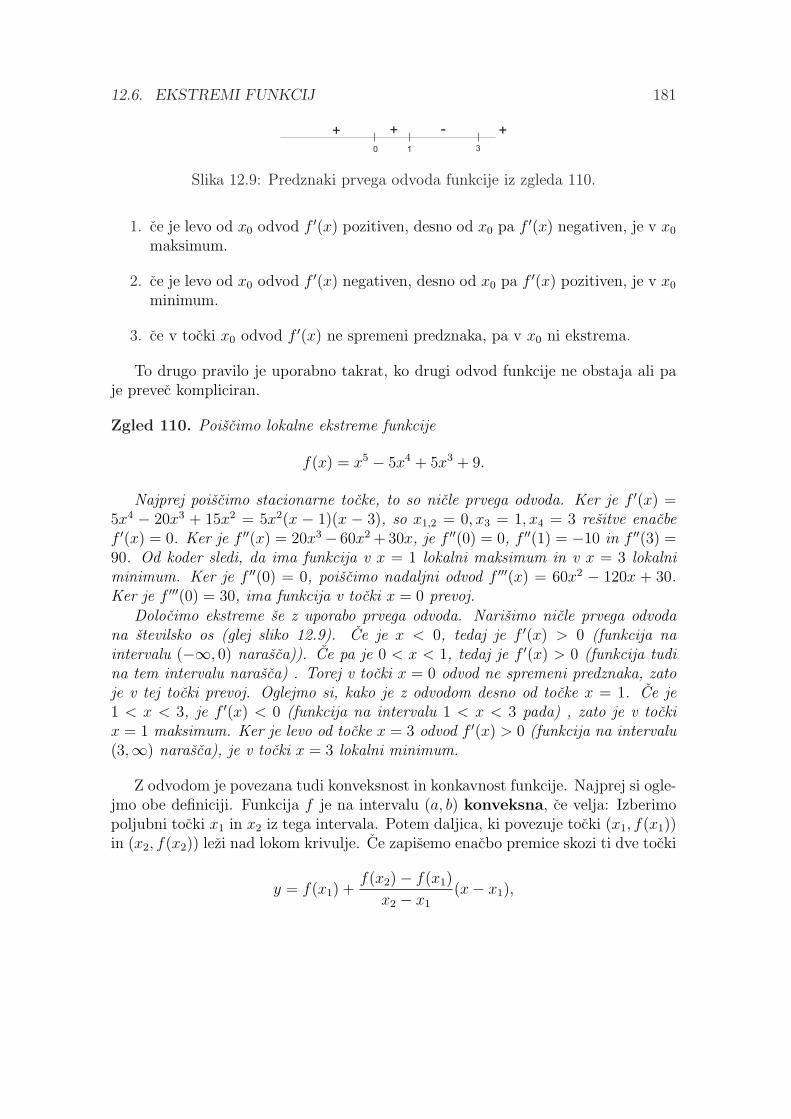
12.6. EKSTREMI FUNKCIJ 181
10
+ + +-
3
Slika 12.9: Predznaki prvega odvoda funkcije iz zgleda 110.
1. ce je levo od x0 odvod f ′(x) pozitiven, desno od x0 pa f ′(x) negativen, je v x0
maksimum.
2. ce je levo od x0 odvod f ′(x) negativen, desno od x0 pa f ′(x) pozitiven, je v x0
minimum.
3. ce v tocki x0 odvod f ′(x) ne spremeni predznaka, pa v x0 ni ekstrema.
To drugo pravilo je uporabno takrat, ko drugi odvod funkcije ne obstaja ali paje prevec kompliciran.
Zgled 110. Poiscimo lokalne ekstreme funkcije
f(x) = x5 − 5x4 + 5x3 + 9.
Najprej poiscimo stacionarne tocke, to so nicle prvega odvoda. Ker je f ′(x) =5x4 − 20x3 + 15x2 = 5x2(x − 1)(x − 3), so x1,2 = 0, x3 = 1, x4 = 3 resitve enacbef ′(x) = 0. Ker je f ′′(x) = 20x3− 60x2 + 30x, je f ′′(0) = 0, f ′′(1) = −10 in f ′′(3) =90. Od koder sledi, da ima funkcija v x = 1 lokalni maksimum in v x = 3 lokalniminimum. Ker je f ′′(0) = 0, poiscimo nadaljni odvod f ′′′(x) = 60x2 − 120x + 30.Ker je f ′′′(0) = 30, ima funkcija v tocki x = 0 prevoj.
Dolocimo ekstreme se z uporabo prvega odvoda. Narisimo nicle prvega odvodana stevilsko os (glej sliko 12.9). Ce je x < 0, tedaj je f ′(x) > 0 (funkcija naintervalu (−∞, 0) narasca)). Ce pa je 0 < x < 1, tedaj je f ′(x) > 0 (funkcija tudina tem intervalu narasca) . Torej v tocki x = 0 odvod ne spremeni predznaka, zatoje v tej tocki prevoj. Oglejmo si, kako je z odvodom desno od tocke x = 1. Ce je1 < x < 3, je f ′(x) < 0 (funkcija na intervalu 1 < x < 3 pada) , zato je v tockix = 1 maksimum. Ker je levo od tocke x = 3 odvod f ′(x) > 0 (funkcija na intervalu(3,∞) narasca), je v tocki x = 3 lokalni minimum.
Z odvodom je povezana tudi konveksnost in konkavnost funkcije. Najprej si ogle-jmo obe definiciji. Funkcija f je na intervalu (a, b) konveksna, ce velja: Izberimopoljubni tocki x1 in x2 iz tega intervala. Potem daljica, ki povezuje tocki (x1, f(x1))in (x2, f(x2)) lezi nad lokom krivulje. Ce zapisemo enacbo premice skozi ti dve tocki
y = f(x1) +f(x2)− f(x1)
x2 − x1
(x− x1),
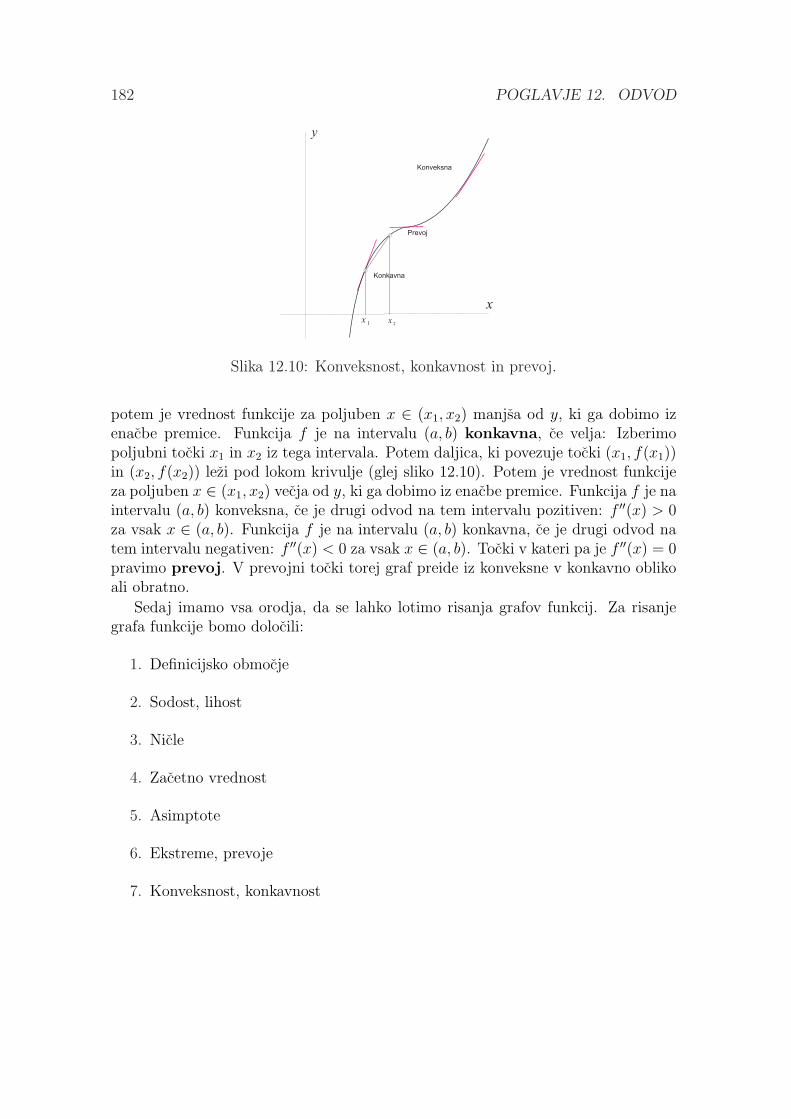
182 POGLAVJE 12. ODVOD
Slika 12.10: Konveksnost, konkavnost in prevoj.
potem je vrednost funkcije za poljuben x ∈ (x1, x2) manjsa od y, ki ga dobimo izenacbe premice. Funkcija f je na intervalu (a, b) konkavna, ce velja: Izberimopoljubni tocki x1 in x2 iz tega intervala. Potem daljica, ki povezuje tocki (x1, f(x1))in (x2, f(x2)) lezi pod lokom krivulje (glej sliko 12.10). Potem je vrednost funkcijeza poljuben x ∈ (x1, x2) vecja od y, ki ga dobimo iz enacbe premice. Funkcija f je naintervalu (a, b) konveksna, ce je drugi odvod na tem intervalu pozitiven: f ′′(x) > 0za vsak x ∈ (a, b). Funkcija f je na intervalu (a, b) konkavna, ce je drugi odvod natem intervalu negativen: f ′′(x) < 0 za vsak x ∈ (a, b). Tocki v kateri pa je f ′′(x) = 0pravimo prevoj. V prevojni tocki torej graf preide iz konveksne v konkavno oblikoali obratno.
Sedaj imamo vsa orodja, da se lahko lotimo risanja grafov funkcij. Za risanjegrafa funkcije bomo dolocili:
1. Definicijsko obmocje
2. Sodost, lihost
3. Nicle
4. Zacetno vrednost
5. Asimptote
6. Ekstreme, prevoje
7. Konveksnost, konkavnost

12.6. EKSTREMI FUNKCIJ 183
Zgled 111. Podrobno analizirajmo funkcijo
f(x) =(x + 1)(x− 2)
x− 3.
Poiscimo najprej nicle funkcije
f(x) = (x+1)(x−2)x−3
= 0 ⇔ x = −1 ali x = 2.
Nicli sta x1 = −1 in x2 = 2 ter sta obe prvega reda. Ulomljena racionalna funkcijaima pole v niclah imenovalca
x− 3 = 0 ⇔ x = 3.
Ker racionalna funkcija v polu ni definirana, je definicijsko obmocje funkcije
Df = R−{3}.Funkcija ima zacetno vrednost f(0) = 2
3. Ce delimo polinom x2−x−2 s polinomom
x− 3, dobimo
x2−x−2x−3
= x + 2 + 4x−3
.
Torej je premica y = x + 2 posevna asimptota grafa funkcije.Odvod funkcije
f ′(x) = (2x−1)(x−3)−(x2−x−2)(x−3)2
= x2−6x+5(x−3)2
.
Kandidate za ekstreme iscemo med niclami prvega odvoda
x2−6x+5(x−3)2
= 0 ⇔ x = 5 ali x = 1.
Za x < 1 je f ′(x) > 0 in za 1 < x < 5 je f ′(x) < 0, zato je v tocki x = 1 lokalnimaksimum. Za x > 5 pa je f ′(x) > 0, zato je v tocki x = 5 lokalni minimum.Izracunajmo se ustrezni vrednosti f(1) = 1 in f(5) = 9. Nazadnje dolocimo seintervale na katerih je funkcija konveksna in konkavna. Zato izracunajmo drugiodvod
f ′′(x) =(2x− 6)(x− 3)2 − (x2 − 6x + 5)2(x− 3)
(x− 3)4=
8(x− 3)
(x− 3)4.
Ker enacba f ′′(x) = 0 ni izpolnjena za noben x iz definicijskega obmocja, zatofunkcija nima prevojev. Ker je f ′′(x) < 0 za vsa realna stevila, ki so manjsa od3, je na intervalu (−∞, 3) funkcija konkavna. Ker pa je f ′′(x) > 0, za vsa realnastevila, ki so vecja od 3, je funkcija na intervalu (3,∞) konveksna. Na sliki 12.11smo narisali graf funkcije.

184 POGLAVJE 12. ODVOD
Slika 12.11: Graf funkcije iz zgleda 111.
12.7 Uporabne naloge
Zgled 112. Funkcija prihodka nekega podjetja za dani izdelek ima obliko P (x) =−x2 + 9x, z x smo oznacili proizvedeno kolicino izdelka. Funkcija skupnih stroskovpa je S(x) = x2 + x + 2. Ugotovimo optimalno proizvodno kolicino glede na najvecjidohodek in izracunajmo ta dohodek.
Dohodek podjetja je D(x) = P (x) − S(x) = −2x2 + 8x − 2. Iscemo maksimumte funkcije. Izracunajmo prvi odvod
D′(x) = −4x + 8.
in ga enacimo z nic
−4x + 8 = 0 ⇔ x = 2.
Drugi odvod D′′(x) = −4, torej je v tocki x = 2 res maksimum. Izracun je potrdilnam ze znano dejstvo, da kvadratna funkcija z negativnim vodilnim koeficientom vtemenu doseze maksimalno vrednost. Torej tocka T (2, 6) je teme funkcije. Najvecjidohodek bo 6 pri proizvedeni kolicini 2.
Zgled 113. Kateri izmed pravokotnikov z obsegom 5m ima najvecjo ploscino?Oznacimo z a in b stranici pravokotnika. Obseg pravokotnika je O = 2a + 2b in
ploscina P = ab. Vemo, da je 2a + 2b = 5 ali a = 5−2b2
. V formulo za ploscino

12.8. TAYLORJEVA FORMULA 185
vstavimo a in dobimo
P =5− 2b
2b = −b2 +
5
2b.
Iscemo maksimum funkcije P (b). Izracunajmo prvi odvod P ′(b) = −2b + 52. Ce ga
enacimo z nic −2b + 52
= 0, dobimo b = 54. Iz zgleda 112 vemo, da je v tej tocki
maksimum. Iskani pravokotnik ima stranico a = 54
in stranico b = 54.
12.8 Taylorjeva formula
V tem razdelku bomo pokazali, da lahko poljubno dovoljkrat zvezno odvedljivofunkcijo aproksimiramo s polinomom. To nam pomaga pri racunanju vrednostizapletenih funkcij, prav tako je Taylorjeva formula uporabna pri numericnem inte-griranju (glej poglavje Integral).
Naj bo funkcija f zvezna funkcija, definirana na zaprtem intervalu med x0 in x,ki je na odprtem intervalu med x0 in x vsaj (n+1)-krat odvedljiva. Potem za vsakx obstaja primerno stevilo ϑ med 0 in 1, da je
f(x) = f(x0)+(x−x0)
1!f ′(x0)+
(x−x0)2
2!f ′′(x0)+
(x−x0)3
3!f ′′′(x0)+. . .+ (x−x0)n
n!f (n)(x0)+Rn,
pri cemer je Rn = (x−x0)n+1
(n+1)!f (n+1)(x0+ϑ(x−x0)). Ta formula se imenuje Taylorjeva
formula, zadnji clen Rn pa ostanek. Izrazu na desni pravimo razvoj funkcije vTaylorjevo formulo okoli tocke x0. Ce je funkcija taka, da postane Rn pri dovoljvelikem n poljubno majhen, v tem primeru formulo zapisemo v obliki
f(x) = f(x0) +(x− x0)
1!f ′(x0) +
(x− x0)2
2!f ′′(x0) +
(x− x0)3
3!f ′′′(x0) + . . .
in jo imenujemo Taylorjeva vrsta. Funkcijsko vrednost v tocki x lahko v tem primeruizracunamo s poljubno natancnostjo, ce sestejemo dovolj zaporednih clenov. Kolikoclenov pa moramo sesteti je razvidno iz ostanka.
Zgled 114. Razvijmo funkcijo f(x) = xex v Taylorjevo vrsto okoli tocke x0 = 0Zapisimo prve stiri nenicelne clene.
Zapisimo najprej odvode:
f ′(x) = ex(1 + x), f ′′(x) = ex(2 + x), f ′′′(x) = ex(3 + x), f (4)(x) = ex(4 + x).
Izracunajmo se vrednosti v tocki 0:
f(0) = 0, f ′(0) = 1, f ′′(0) = 2, f ′′′(0) = 3, f (4)(0) = 4.

186 POGLAVJE 12. ODVOD
Taylorjeva vrsta za funkcijo se glasi
f(x) =x
1!+
x2
2!2 +
x3
3!3 +
x4
4!4 + . . .
ali
f(x) = x + x2 +x3
2!+
x4
3!+ . . . .
Iz razvoja funkcije sin x takoj vidimo, da je
limx→0
sin x
x= 1.
Namrecsin x
x= 1− x2
3!+ . . .
, ce gre x proti 0, tedaj so vsi cleni na desni strani od drugega naprej poljubno blizuvrednosti 0.
Zapisimo se nekaj primerov razvoja funkcij v Taylorjevo vrsto okoli tocke x0 = 0:ex = 1 + x
1!+ x2
2!+ x3
3!+ . . .
sin x = x− x3
3!+ x5
5!− x7
7!+ . . .
cos x = 1− x2
2!+ x4
4!− x6
6!+ . . .
12.9 Naloge s postopki za resevanje
1. Odvajajmo funkcijo h(x) = e2x.
Resitev: Funkcijo h lahko sestavimo iz dveh funkcij f(x) = 2x = u ing(f(x)) = g(u) = eu. Izracunajmo f ′(x) = 2 in g′(f(x)) = g′(u) = eu = e2x.Po pravilu za odvod sestavljene funkcije je
h′(x) = g′(f(x))f ′(x) = 2e2x.
2. Odvajajmo funkcijo h(x) = ln(1− 2x).
Resitev: Funkcijo h lahko sestavimo iz dveh funkcij f(x) = 1 − 2x = u ing(f(x)) = g(u) = ln u. Izracunajmo f ′(x) = −2 in g′(f(x)) = g′(u) = 1
u=
11−2x
. Po pravilu za odvod sestavljene funkcije je
h′(x) = g′(f(x))f ′(x) =2
1− 2x.

12.9. NALOGE S POSTOPKI ZA RESEVANJE 187
3. Poiscimo odvod implicitno podane funkcije x2 + y2 + x = 1.
Resitev: Enacbo odvajamo po spremenljivki x in pri tem upostevamo, da jey sestavljena funkcija spremenljivke x in jo je potrebno tako tudi odvajati. Nakoncu izrazimo y′. Torej je
2x + 2yy′ + 1 = 0
ali
y′ = −1 + 2x
2y.
4. Dolocimo enacbo tangente na graf funkcije f(x) = xx−1
v taki tocki, da bo tatangenta vzporedna s premico x + y = 7.
Resitev: Premici sta vzporedni natanko takrat, ko imata isti smerni koefi-cient. Smerni koeficient premice x + y = 7 je −1. Tangenta na graf funkcijef(x) = x
x−1v tocki x ima smerni koeficient f ′(x) = (x)′(x−1)−x(x−1)′
(x−1)2= −1
(x−1)2.
Da dobimo abciso iskane tocke moramo resiti enacbo
−1
(x− 1)2= −1
ali(x− 1)2 = 1.
Ce levo stran kvadriramo in na obeh straneh odstejemo 1, dobimo
x2 − 2x = 0.
Resitvi sta x1 = 0 in x2 = 2. Dotikalisce prve tangente je v tocki (0, 0) indruge v tocki (2, 2). Zapisimo se enacbi obeh tangent:
y = −x
iny = −x + 4.
5. Izracunajmo naslednje limite:
a) limx→1
x3−1x2−1
b) limx→∞
xex

188 POGLAVJE 12. ODVOD
c) limx→∞
ex2
−x
d) limx→0
1−cos xx2
e) limx→0
( 1sin x
− 1tan x
)
Resitev:
a) Ce vstavimo v funkcijski izraz x = 1, dobimo 00, kar pomeni, da lahko
uporabimo L’Hospitalovo pravilo
limx→1
x3 − 1
x2 − 1= lim
x→1
3x2
2x.
Sedaj smemo krajsati, ker je x 6= 0. Zato je limx→1
3x2
= ∞. Rezultat, ki smo
ga dobili, je bil pricakovan, saj ima ulomljena racionalna funkcija v tockix = 1 pol.
b) V tem primeru dobimo izraz oblike ∞∞ , kar pa pomeni, da so izpolnjeni
pogoji za uporabo zgornjega pravila
limx→∞
x
ex= lim
x→∞1
ex=
1
∞ = 0.
V naslednjih dveh primerih bomo uporabili pravilo, ki pravi, da je limitaprodukta funkcije s konstanto enaka produktu konstante z limito funkcije.
c) limx→∞
ex2
−x= − lim
x→∞e
x2
x= −∞
∞ = − limx→∞
12e
x2
1= −∞
d) limx→0
1−cos xx2 = 0
0= lim
x→0
sin x2x
= 12limx→0
sin xx
= 12.
e) Pri funkciji 1sin x
− 1tan x
dobimo nedoloceni izraz ∞ − ∞. Z ureditvijoulomka na skupni imenovalec 1
sin x− 1
tan x= 1−cos x
sin xdobimo v tocki 0
nedoloceni izraz 00
in lahko uporabimo L’Hospitalovo pravilo
limx→0
1−cos xsin x
= limx→0
sin xcos x
= limx→0
tan x = 0.
6. Podrobno analizirajmo funkcijo f(x) = (2x− 1)(x + 3)2.
Resitev: Funkcija je definirana za vsa realna stevila in ni ne soda in ne liha.Nicle funkcije so x1 = 1
2in x2,3 = −3. Funkcija seka ordinatno os v tocki
(0,−9). Odvod polinoma je
f ′(x) = 6x2 + 22x + 12.

12.9. NALOGE S POSTOPKI ZA RESEVANJE 189
Slika 12.12: Graf funkcije k nalogi 6.
Ker je 6x2 + 22x + 12 = 0 natanko tedaj, ko je x = −3 ali x = −23, zato sta ti
dve tocki stacionarni tocki Izracunajmo se drugi odvod
f ′′(x) = 12x + 22.
Ker je f ′′(−3) = −14 < 0 in f ′′(−23) = 14 > 0, zato ima funkcija f v
tocki E1(−3, 0) maksimum in v tocki E2(−23,−12, 7) minimum. Funkcija je
konkavna na intervalu (−∞,−116) in konveksna na intervalu (−11
6,∞). Sedaj
imamo vse potrebno, da lahko narisemo graf funkcije (glej sliko 12.12).

190 POGLAVJE 12. ODVOD
Poglavje 13
Integral
13.1 Nedoloceni integral
V prejsnjem poglavju smo dani funkciji f iskali odvod f ′. Osnovna naloga v tempoglavju pa bo poiskati tako funkcijo F , da bo njen odvod F ′ enak dani funkciji f .
Definicija 16. Naj bo f funkcija definirana na intervalu I. Ce je F taka funkcijana tem intervalu, da je
F ′ = f
pravimo, da je F nedoloceni integral funkcije f . Obicajno nedoloceni integral zafunkcijo f oznacimo s
F (x) =
∫f(x)dx.
Zapisu∫
dx pravimo integralski znak, funkciji f(x) recemo integrand in F (x) =∫f(x)dx je prvotna funkcija (primitivna funkcija) ali integral. Dolocevanju prvotne
funkcije pravimo integriranje.
Videli smo, da je (f(x)+C)′ = f ′(x). Kar pomeni, ce iscemo nedoloceni integralfunkcije f ′(x) ni enolicno dolocen, pac pa do aditivne konstante natancno, kar zesamo ime pove. Velja:
Ce je F nedoloceni integral funkcije f , je njen nedoloceni integral tudi funkcijaG, G(x) = F (x) + C, kjer je C ∈ R poljubna konstanta, in vsak nedoloceni integralfunkcije f ima obliko F (x) + C.
Zgled 115. Izracunajmo∫
x2dx.Ker je (x3)′ = 3x2, je (1
3x3)′ = x2. Torej je
∫x2dx = 1
3x3 + C, kjer je C ∈ R
poljubna konstanta.
Zgled 116. Izracunajmo∫
cos xdx.Ker je (sin x)′ = cos x, je
∫cos xdx = sin x+C, kjer je C ∈ R poljubna konstanta.
191

192 POGLAVJE 13. INTEGRAL
Tabelo integralov nekaterih elementarnih funkcij dobimo iz tabele 12.3 odvodovelementarnih funkcij.
∫xrdx = 1
r+1xr+1 + C, r 6= −1∫
1xdx = ln |x|+ C∫
exdx = ex + C∫axdx = 1
ln aax + C, a > 0, a 6= 1∫
sin xdx = − cos x + C∫cos xdx = sin x + C∫
1cos2 x
dx = tan x + C∫1
sin2 xdx = − cot x + C∫
1√1−x2 dx = arcsin x + C = − arccos x + C1∫1
x2+1dx = arctan x + C∫
1√1+x2 dx = ln(x +
√1 + x2) + C∫
dx√x2+a
= ln(x +√
x2 + a + C
Tabela 13.1: Tabela integralov elementarnih funkcij.
13.1.1 Integral vsote dveh funkcij
Ce imata funkciji f in g nedolocena integrala, ga ima tudi njuna vsota in velja∫
(f(x) + g(x))dx =
∫f(x)dx +
∫g(x)dx.
Torej integral vsote je vsota integralov.To pravilo hitro izpeljemo. Naj bo F (x) =
∫f(x)dx in G(x) =
∫g(x)dx. Potem
je (F (x) + G(x))′ = F ′(x) + G′(x) = f(x) + g(x) in zato je∫
(f(x) + g(x))dx =F (x) + G(x) =
∫f(x)dx +
∫g(x)dx.
13.1.2 Integral produkta funkcije s konstanto
Ce ima funkcija f nedolocen integral, ga ima tudi funkcija kf , kjer je k ∈ R in velja∫
(kf(x))dx = k
∫f(x)dx.
Torej, pri integriranju lahko konstantni faktor prestavimo pred integralski znak.

13.1. NEDOLOCENI INTEGRAL 193
Poglejmo si se izpeljavo tega pravila. Naj bo F (x) =∫
f(x)dx. Tedaj je(kF (x))′ = kF ′(x) = kf(x). Zato je
∫(kf(x))dx = kF (x) = k
∫f(x)dx.
Oglejmo si uporabo obeh pravil.
Zgled 117. Izracunajmo∫
(x5 + 3x2 + 1)dx =∫
x5dx +∫
3x2dx +∫
1dx = x6
6+
3x3
3+ x + C = x6
6+ x3 + x + C.
13.1.3 Vpeljava nove spremenljivke ali substitucija
Ce ima funkcija f(t) nedoloceni integral F (t) =∫
f(t)dt in je t(x) odvedljivafunkcija, ima nedoloceni integral tudi funkcija f(t(x))t’(x) in velja
∫f(t(x))t′(x)dx =
∫f(t)dt.
To pravilo sledi iz odvoda sestavljene funkcije (F (t))′ = F ′(t)t′(x) = f(t)t′(x).Zato je
∫f(t)t′(x)dx =
∫f(t)dt.
Zgled 118. Izracunajmo∫
(3x + 5)10dx.Ker je (3x + 5)10 polinom bi ga lahko eksplicitno izracunali in nato integrirali po
clenih. Vendar bi omenjen postopek vzel kar nekaj casa in zato v praksi ni uporaben.Naj bo t = 3x + 5, potem je dt = (3x + 5)′ = 3dx. Zato je
∫(3x + 5)10 1
33dx = 1
3
∫(3x + 5)103dx = 1
3
∫t10dt = 1
3t11
11+ C = 1
3(3x+5)11
11+ C.
Zgled 119. Izracunajmo∫
( 2x+3x2+3x+2
)dx.
Naj bo t = x2 + 3x + 2, potem je dt = (2x + 3)dx. Sledi∫
( 2x+3x2+3x+2
)dx =∫
1tdt =
ln |t|+ C = ln |x2 + 3x + 2|+ C.
Iz zgleda 119 sledi naslednje pravilo. Ce je funkcija f odvedljiva, velja
∫f ′(x)
f(x)dx = ln |f(x)|+ C. (13.1.1)
13.1.4 Integriranje po delih (per partes)
Ta metoda izhaja iz formule za odvod produkta dveh funkcij. Spomnimo se
(u(x)v(x))′ = u′(x)v(x) + u(x)v′(x).

194 POGLAVJE 13. INTEGRAL
Torej je po definiciji nedolocenega integrala
u(x)v(x) =
∫u′(x)v(x)dx +
∫u(x)v′(x)dx.
Od tod dobimo∫
u(x)v′(x)dx = u(x)v(x)−∫
u′(x)v(x)dx
ali krajse ∫udv = uv −
∫vdu.
Integracija po delih je uporabna, kadar je integral∫
vdu na desni enostavnejsi odintegrala
∫udv na levi. Bistvo te metode je, da integrand spretno zapisemo v obliki
dveh funkcij, od katerih bo potrebno eno odvajati in drugo integrirati. Z u oznacimofunkcijo, ki jo bomo odvajali in z dv funkcijo, ki jo bomo integrirali.
Zgled 120. Izracunajmo integral∫
ln xdx.Ker funkcije ln x ne znamo integrirati, naj bo u = ln x in dv = dx. Potem je
du = 1xdx in v = x. Torej lahko zapisemo
∫ln xdx = x ln x−
∫x
1
xdx = x ln x− x + C.
Z integracijo po delih lahko resimo tudi vsak integral oblike∫
eaxp(x)dx,∫
ln(ax)p(x)dx,∫cos(ax)p(x)dx,
∫sin(ax)p(x)dx, kjer je p(x) polinom in a od nic razlicna kon-
stanta. V teh primerih polinom odvajamo, preostalo funkcijo pa integriramo. Odstopnje polinoma pa je odvisno, kolikokrat zaporedoma bomo uporabili integracijopo delih (na vsakem koraku se stopnja polinoma za 1 zmanjsa).
Zgled 121. Izracunajmo integral∫
xexdx.Naj bo u = x in dv = exdx. Potem je du = dx in v = ex. Torej lahko zapisemo∫
xexdx = xex − ∫exdx = xex − ex + C.
13.1.5 Integriranje nekaterih racionalnih funkcij
Racionalna funkcija je kvocient dveh polinomov. Nasa naloga sedaj bo izracunatiintegral ∫
f(x)
g(x)dx,

13.1. NEDOLOCENI INTEGRAL 195
kjer sta f(x) in g(x) polinoma. Ce je polinom v stevcu vecje ali enake stopnjekot polinom v imenovalcu, tedaj polinoma najprej delimo. Naj bo kvocient q(x) inostanek r(x). Tedaj je
f(x)
g(x)= q(x) +
r(x)
g(x).
Ker je integral vsote dveh funkcij vsota integralov le-teh, je∫
f(x)
g(x)=
∫q(x) +
∫r(x)
g(x).
Ker je q(x) polinom, ki ga znamo integrirati, je sedaj cilj najti integral∫ r(x)
g(x), pri
cemer je stopnja polinoma v stevcu manjsa od stopnje polinoma v imenovalcu. Ogle-jmo si nekaj najpreprostejsih primerov.
Zgled 122. Izracunajmo integral∫
x4+x3+x2+x+1x3+1
dx.Ker je stopnja polinoma v stevcu vecja od stopnje polinoma v imenovalcu, poli-
noma zdelimox4 + x3 + x2 + x + 1
x3 + 1= (x + 1) +
x2
x3 + 1.
Torej je ∫x4 + x3 + x2 + x + 1
x3 + 1dx =
∫(x + 1)dx +
∫x2
x3 + 1dx.
Prvi integral na desni strani bomo z lahkoto izracunali, tudi drugi integral nam nebo delal tezav, saj smo take integrale ze resevali. Ce zapisemo
∫x2
x3 + 1dx =
1
3
∫3x2
x3 + 1dx,
potem opazimo, da je stevec odvod imenovalca (glej 13.1.1). Torej je 13
∫3x2
x3+1dx =
13ln |x3 + 1|+ C. Resitev nasega zacetnega integrala je
∫x4 + x3 + x2 + x + 1
x3 + 1dx =
x2
2+ x +
1
3ln |x3 + 1|+ C.
Zgled 123. Izracunajmo∫
32x+5
dx.Tudi ta primer lahko resimo z enako metodo kot prejsnji primer. Integral malo
preuredimo in dobimo ∫3
2x + 5dx =
3
2
∫2
2x + 5dx.
Tedaj je3
2
∫2
2x + 5dx =
3
2ln |2x + 5|+ C.

196 POGLAVJE 13. INTEGRAL
Na enak nacin kot zgled 123 lahko uzenemo vsako racionalno funkcijo, ki imav imenovalcu polinom prve stopnje (linearni faktor). Seveda, ce bi bila stopnjapolinoma v stevcu vecja ali enaka od stopnje polinoma v imenovalcu, potem bipolinoma najprej zdelili, to bo veljalo tudi v nadaljevanju. Sedaj bomo resevaliracionalne funkcije, ki bodo imele v imenovalcu polinom druge stopnje (kvadratnofunkcijo). Vemo, da ima kvadratna funkcija lahko dve razlicni realni nicli, eno niclo,ki je dvakratna ali pa nima realnih nicel. v nadaljevanju bomo vse tri moznostiproucili na primerih. Pripomnimo, da se pri uvedbi nove spremenljivke integralpogosto spremeni v integral ulomljene racionalne funkcije.
Zgled 124. Izracunajmo∫
2xx2−5x+6
dx.
Racionalno funkcijo 2xx2−5x+6
= 2x(x−3)(x−2)
lahko pisemo v obliki vsote parcialnih
ulomkov Ax−3
+ Bx−2
, pri tem sta A in B konstanti (to velja, ce je stopnja stevcamanjsa od stopnje imenovalca). Torej je
2x
(x− 3)(x− 2)=
A
x− 3+
B
x− 2. (13.1.2)
Ce odpravimo ulomke tako, da pomnozimo obe strani enacbe 13.1.2 z (x− 3)(x− 2),dobimo
2x = A(x− 2) + B(x− 3)
ali2x = x(A + B)− 2A− 3B.
Ker morajo biti koeficienti pri istih potencah spremenljivke x na obeh straneh enaki,sledita od tod enacbi A + B = 2 in −2A− 3B = 0. Resitev teh dveh enacb je A = 6in B = −4. Sedaj lahko zacetni integral zapisemo
∫2x
x2 − 5x + 6dx =
∫6
x− 3dx−
∫4
x− 2dx = 6 ln |x− 3| − 4 ln |x− 2|+ C.
Metoda s parcialnimi ulomki je uporabna v vseh primerih, pri katerih je stevecnizje stopnje od imenovalca. Nicle polinoma v imenovalcu pa so realne in enkratnenpr.
∫2x2+41x−91
(x−1)(x+3)(x−4)dx. Bralcu prepuscamo, da resi omenjen integral.
Zgled 125. Izracunajmo∫
3x2+6x+9
dx.
Vzemimo t = (x + 3), potem je dt = dx. Sledi∫
3x2+6x+9
dx = 3∫
1(x+3)2
=
3∫
dtt2
= 3∫
t−2dt = −3t−1 + C = − 3x+3
+ C.
Zgled 126. Izracunajmo∫
x−1(x+1)2
dx.
Tudi ta primer bomo resili z uvedbo nove spremenljivke. Vzemimo t = (x + 1),potem je dt = dx in x − 1 = t − 2. Sledi
∫x−1
(x+1)2dx =
∫t−2t2
dt =∫
tt2
dt − ∫2t2
=
ln |t|+ 2t+ C = ln |x + 1|+ 2
x+1+ C.
13.1. NEDOLOCENI INTEGRAL 197
Ostane nam primer, ko je polinom ulomka realno nerazcepljiv. Spet bomo locilidve moznosti glede na stopnjo stevca.
Zgled 127. Izracunajmo integral∫
1x2+2x+3
dx.Nas cilj je uporabiti formulo
∫1
t2 + 1dt = arctan t + C. (13.1.3)
Kvadratno funkcijo x2 + 2x + 3 razcepimo na vsoto kvadratov (temenska oblika)x2+2x+3 = (x+1)2+2. Torej je
∫1
x2+2x+3dx =
∫1
(x+1)2+2dx. Preden vpeljemo novo
spremenljivko in uporabimo formulo 13.1.3 v imenovalcu izpostavimo 2. Dobimo∫
1(x+1)2+2
dx =∫
1
2((x+1)2
2+1)
dx = 12
∫1
((x+1)2
2+1)
dx = 12
∫1
(x+1√2
)2+1dx.
Naj bo t = x+1√2, potem je dt = 1√
2dx. Torej je
12
∫1
(x+1√2
)2+1dx =
√2
2
∫ 1√2
(x+1√2
)2+1dx =
√2
2
∫1
t2+1dt =
√2
2arctan t + C =
√2
2arctan(x+1√
2) + C.
Zgled 128. Izracunajmo se integral∫
4x+1x2+2x+3
dx.
V tem primeru ravnamo takole. Stevec ulomka 4x + 1 razcepimo na veckratnikodvoda imenovalca plus konstanta 4x + 1 = 2(2x + 2)− 3. Potem je
∫4x+1
x2+2x+3dx =
∫ 2(2x+2)−3x2+2x+3
dx = 2∫
2x+2x2+2x+3
dx− 3∫
1x2+2x+3
dx.
Prvi integral resimo z uvedbo nove spremenljivke ali pa upostevamo, da je stevecodvod imenovalca. Drugi integral pa smo resili v zgledu 127. Torej je
∫4x+1
x2+2x+3dx = 2 ln |x2 + 2x + 3| − 3
√2
2arctan(x+1√
2) + C.
Za konec si bomo ogledali, kako resujemo integrale oblike∫
dx√ax2+bx+c
. Locili
bomo dva primera glede na predznak koeficienta a (a < 0 ali a > 0).
Zgled 129. Izracunajmo∫
dx√2x2−x+3
.Opazimo, da je vodilni koeficient troclenika pozitiven a = 2. Najprej v imenovalcu
izpostavimo√
2, dobimo∫
dx√2x2−x+3
= 1√2
∫dx√
x2−x2+ 3
2
. Nato troclenik x2 − x2
+ 32
dopolnimo do popolnega kvadrata in dobimo (x− 14)2 + 23
16. Torej je 1√
2
∫dx√
x2−x2+ 3
2
=
1√2
∫dx√
(x− 14)2+ 23
16
. Sedaj vpeljemo novo neznanko t = x− 14, potem je dt = dx. Sledi
1√2
∫dx√
(x− 14)2+ 23
16
= 1√2
∫dt√
t2+ 2316
. Upostevali bomo formulo
∫dt√
t2 + a= ln(t +
√t2 + a) + C.

198 POGLAVJE 13. INTEGRAL
Slika 13.1: Riemannova vsota.
Dobimo 1√2
∫dt√
t2+ 2316
= 1√2ln(t +
√t2 + 23
16) + C = 1√
2ln(x− 1
4+
√x2 − x
2+ 3
2) + C.
Zgled 130. Izracunajmo integral∫
dx√4−2x2 .
Upostevali bomo formulo∫
1√1−t2
dt = arcsin t + C. Najprej v imenovalcu iz-
postavimo 2, dobimo∫
dx√4−2x2 = 1
2
∫dx√
1− 12x2
= 12
∫dx√
1−( x√2)2
. Sedaj vpeljemo novo
neznanko t = x√2, potem je dt = dx√
2. Sledi 1
2
∫dx√
1−( x√2)2
= 12
∫dt√
2√1−t2
=√
22
arcsin t +
C =√
22
arcsin( x√2) + C.
13.2 Doloceni integral
Pojem dolocenega integrala je nastal ob racunanju ploscin in prostornin. Naj bofunkcija f(x) na intervalu [a, b] zvezna in povsod pozitivna. Zanima nas ploscinalika, ki je omejen z grafom funkcije, abcisno osjo in premicama x = a in x = b(glej sliko 13.1). Priblizno lahko ploscino lika izracunamo tako, da ga razrezemo nanavpicne trakove. Pricakovati je, da bomo najbolj natancen rezultat dobili v limiti,ko gredo sirine trakov proti 0.
Priblizno vrednost te ploscine izracunamo takole: Razdelimo interval med a inb na n delov, za kar potrebujemo n − 1 delilnih tock, ki jih po vrsti oznacimox1, x2, . . . , xn−1, kjer je a < x1 < x2 < . . . < xn−1 < b. Oznacimo se a = x0
in b = xn. Sirine delnih intervalov oznacimo z δ1, δ2, . . . , δn (so lahko razlicne),torej je δ1 = x1 − x0, itd. Stevilo δk je ocitno pozitivno in pomeni sirino k-tegapodintervala. Na vsakem podintervalu si izberemo poljubno tocko ξk, to je tocka na

13.2. DOLOCENI INTEGRAL 199
k-tem podintervalu. Nato tvorimo produkte
f(ξ1)δ1, f(ξ2)δ2, . . . , f(ξn)δn.
Produkt f(ξk)δk je ploscina pravokotnika, ki ima za osnovnico δk, za visino pa funkci-jsko vrednost f(ξk). Ta produkt je priblizno enak ploscini k-tega pasu. Sedaj vse teprodukte sestejmo
n∑
k=1
f(ξk)δk = f(ξ1)δ1 + f(ξ2)δ2 + . . . + f(ξn)δn.
To vsoto imenujemo Riemannova vsota funkcije f(x) pri dani delitvi na podin-tervale intervala [a, b].
Dolocen integral I =∫ b
af(x)dx je koncna limita vsote lim
∑nk=1 f(ξk)δk, ko
gredo vse sirine δk delnih intervalov proti 0, torej n → 0. Interval [a, b] imenujemointegracijski interval, stevili a in b spodnja in zgornja meja integracije, x paintegracijska spremenljivka.
Ali limita vedno obstaja? Ce je funkcija zvezna in nenegativna, tedaj se dapokazati, da limita obstaja in je eno samo stevilo - ploscina lika med krivuljo in ab-cisno osjo (glej sliko 13.1 ), kakorkoli izbiramo vmesne tocke xk in kakorkoli izbiramotocke ξk na podintervalih. Pravimo, da je f integrabilna na intervalu [a, b].
13.2.1 Lastnosti dolocenega integrala
1. Ce v dolocenem integralu zamenjamo meji med seboj, integral spremeni samopredznak
∫ b
af(x)dx = − ∫ a
bf(x)dx.
2. Ce sta obe meji enaki, je vrednost integrala enaka 0
∫ a
af(x)dx = 0.
3. Ce je f na intervalu [a, b] zvezna in c ∈ (a, b) poljubno stevilo, je
∫ b
af(x)dx =
∫ c
af(x)dx +
∫ b
cf(x)dx.

200 POGLAVJE 13. INTEGRAL
13.3 Zveza med dolocenim in nedolocenim inte-
gralom
Zapisimo osnovni izrek integralskega racuna:Naj bo funkcija f zvezna na [a, b]. Ce je funkcija F poljuben nedoloceni integral
za funkcijo f , je ∫ b
a
f(x)dx = F (x)|ba = F (b)− F (a).
Torej takoj, ko znamo izracunati nedoloceni integral, znamo izracunati tudi doloceniintegral, ki je razlika vrednosti nedolocenih integralov na zgornji in spodnji meji,kar pa je po absolutni vrednosti enako ploscini liki med krivuljo in abcisno osjo.Nazorneje bomo to prikazali v naslednjem razdelku.
Preden zacnemo s konkretnimi primeri si oglejmo se pomembno lastnost dolocenegaintegrala.
Ce sta funkciji f in g integrabilni na intervalu [a, b], α in β pa poljubni realnistevili, je funkcija h(x) = αf(x) + βg(x) tudi integrabilna na intervalu [a, b] in velja
∫ b
a
(αf(x) + βg(x))dx = α
∫ b
a
f(x)dx + β
∫ b
a
g(x)dx.
Zgled 131. Izracunajmo doloceni integral∫ 2
0(x2 + 1)dx.
Najprej izracunamo nedoloceni integral
∫(x2 + 1)dx =
x3
3+ x + C = F (x).
Nato izracunamo vrednost funkcije F (x) pri zgornji in spodnji meji F (0) = C terF (2) = 8
3+ 2 + C. Dobimo
∫ 2
0
(x2 + 1)dx = F (2)− F (0) =8
3+ 2 + C − C =
8
3+ 2.
V nadaljevanju bomo konstanto C izpuscali, ker pri odstevanju odpade.
Zgled 132. Izracunajmo se doloceni integral∫ 0
−1(x3)dx.
Nedolocen integral∫
(x3)dx = x4
4, potem je
∫ 0
−1(x3)dx = x4
4|0−1 = −1
4.
Zgled 133. Poglejmo si uporabo Taylorjeve formule in priblizno izracunajmo ploscinopod krivuljo f(x) = e−x2
na intervalu od 0 do 1.∫ 1
0e−x2
=∫ 1
0(1 − x2 + x4
2− x6
6+ . . .)dx = x − x3
3+ x5
10− x7
42+ . . . |10= = 1 − 1
3+
110− 1
42+ 1
216− . . . ≈ 0, 7474

13.4. UPORABA DOLOCENEGA INTEGRALA 201
Slika 13.2: Ploscina lika, ki je omejen z grafom pozitivne funkcije in x-osjo.
13.4 Uporaba dolocenega integrala
13.4.1 Racunanje ploscin
Ce je funkcija f zvezna in pozitivna na intervalu [a,b] je ploscina lika, ki ga graffunkcije f omejuje z x osjo na intervalu [a,b]:
S =
∫ b
a
f(x)dx.
Glej sliko 13.2. Koliko pa je ploscina lika med grafom negativne funkcije in x osjona intervalu [a,b] (glej sliko 13.3)? Zlahka ugotovimo, da je ploscina lika enakaabsolutni vrednosti dolocenega integrala na intervalu [a,b]:
S = |∫ b
a
f(x)dx|.
Zgled 134. Dolocimo ploscino lika, ki ga omejujeta abcisa in parabola y = 1− x2.Najprej skicirajmo graf funkcije (slika 13.4). Ploscina je
S =
∫ 1
−1
(1− x2)dx = (x− x3
3) |1−1= (1− 1
3)− (−1− −1
3) =
4
3.

202 POGLAVJE 13. INTEGRAL
Slika 13.3: Ploscina lika, ki je omejen z grafom negativne funkcije in x-osjo.
Slika 13.4: Slika k zgledu 134.
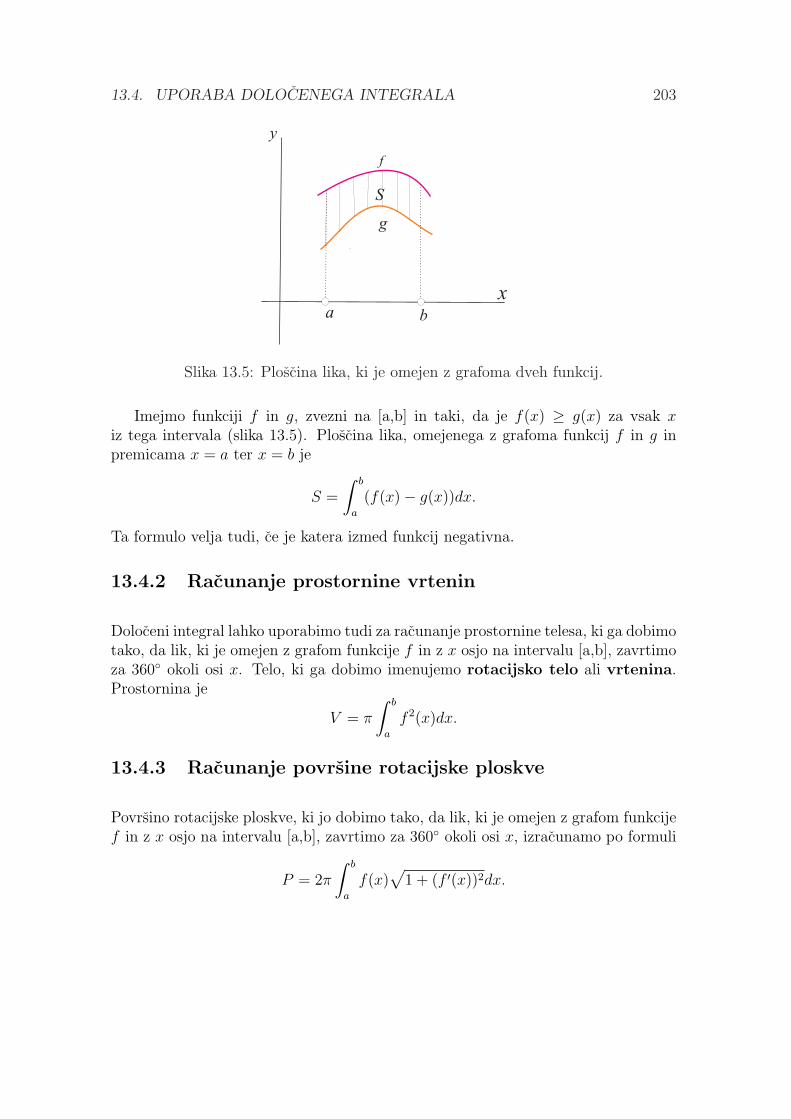
13.4. UPORABA DOLOCENEGA INTEGRALA 203
Slika 13.5: Ploscina lika, ki je omejen z grafoma dveh funkcij.
Imejmo funkciji f in g, zvezni na [a,b] in taki, da je f(x) ≥ g(x) za vsak xiz tega intervala (slika 13.5). Ploscina lika, omejenega z grafoma funkcij f in g inpremicama x = a ter x = b je
S =
∫ b
a
(f(x)− g(x))dx.
Ta formulo velja tudi, ce je katera izmed funkcij negativna.
13.4.2 Racunanje prostornine vrtenin
Doloceni integral lahko uporabimo tudi za racunanje prostornine telesa, ki ga dobimotako, da lik, ki je omejen z grafom funkcije f in z x osjo na intervalu [a,b], zavrtimoza 360◦ okoli osi x. Telo, ki ga dobimo imenujemo rotacijsko telo ali vrtenina.Prostornina je
V = π
∫ b
a
f 2(x)dx.
13.4.3 Racunanje povrsine rotacijske ploskve
Povrsino rotacijske ploskve, ki jo dobimo tako, da lik, ki je omejen z grafom funkcijef in z x osjo na intervalu [a,b], zavrtimo za 360◦ okoli osi x, izracunamo po formuli
P = 2π
∫ b
a
f(x)√
1 + (f ′(x))2dx.

204 POGLAVJE 13. INTEGRAL
Zgled 135. Zavrtimo kroznico x2 + y2 = 1 okoli x osi. Izracunajmo volumen inpovrsino nastalega telesa.
Napisimo enacbo kroznice za tisti del, ki lezi nad x osjo:
f(x) = y =√
1− x2.
Torej je V = π∫ 1
−1(1 − x2)dx = π(x − x3
3)|1−1 = π(1 − 1
3− (−1 + 1
3)) = 4π
3in P =
2π∫ 1
−1
√1− x2
√1 + x2
1−x2 dx = 2π∫ 1
−1dx = 2π(x)|1−1 = 4π. Izpeljali smo volumen in
obseg krogle z radijem 1 enoto.
13.4.4 Racunanje dolzine krivulje
Doloceni integral lahko uporabimo tudi za racunanje dolzine krivulje grafa funkcijef na intervalu [a,b]. Dolzina krivulje je
s =
∫ b
a
√1 + (f ′(x))2dx.
Zgled 136. Izracunajmo dolzino premice y = 1− 2x na intervalu [−1, 1].Dolzina premice je
s =
∫ 1
−1
√1 + (−2)2dx = 2
√5
13.5 Naloge s postopki za resevanje
1. Izracunajmo integral∫
(x− 1)(x + 1)dx.
Resitev: Ker je (x−1)(x+1) = x2−1, je∫
(x−1)(x+1)dx =∫
(x2−1)dx =∫x2dx− ∫
1dx = x3
3+ x + C.
2. Izracunajmo integral∫
(√
x− 1x2 )dx.
Resitev:∫
(√
x− 1x2 )dx =
∫x
12 dx− ∫
x−2dx = x3232
− x−1
−1+ C = 2
3x
32 + 1
x+ C.
3. Izracunajmo x∫ √
x2 + 1dx.
Resitev: Vzemimo t = x2 + 1, potem je dt = 2xdx. Sledi∫
x√
x2 + 1dx =∫122x√
x2 + 1dx = 12
∫2x√
x2 + 1dx = 12
∫ √tdt = 1
2
∫t
12 dt = 1
2t3232
+ C =
13(x2 + 1)
32 + C.

13.5. NALOGE S POSTOPKI ZA RESEVANJE 205
4. Izracunajmo∫
ln2 xx
dx.
Resitev: Vzemimo t = ln x, potem je dt = 1xdx. Sledi
∫ln2 x
xdx =
∫t2dt =
t3
3+ C = ln3 x
3+ C.
5. Izracunajmo∫
sin6 x cos xdx.
Resitev: Vzemimo t = sin x, potem je dt = cos xdx. Sledi∫
sin6 x cos xdx =∫t6dt = t7
t+ C = sin7 x
t+ C.
6. Izracunajmo∫
sin(5x + 3)dx.
Resitev: Naj bo t = 5x + 3, potem je dt = 5dx. Sledi∫
sin(5x + 3)dx =∫15· 5 sin(5x + 3)dx = 1
5
∫5 sin(5x + 3)dx = 1
5
∫sin tdt = 1
5(− cos t) + C =
−15(cos(5x + 3)) + C.
7. Izracunajmo∫
tan xdx.
Resitev: Ker je tan x = sin xcos x
in (cos x)′ = − sin x, vzamemo t = cos x. Tedajje dt = − sin xdx in
∫sin xcos x
dx = − ∫1tdt = −ln|t|+ C = −ln| cos x|+ C.
8. Izracunajmo integral∫
(x2 − 1) ln xdx.
Resitev: Naj bo u = ln x in dv = (x2−1)dx. Potem je du = 1xdx in v = x3
3−x.
Torej lahko zapisemo∫
(x2 − 1) ln xdx = (x3
3− x) ln x− ∫
(x3
3− x) 1
xdx = (x3
3−
x) ln x− ∫(x2
3− 1)dx = (x3
3− x) ln x− (x3
9− x) + C =
9. Izracunajmo integral∫
x2 cos x.
Resitev: Naj bo u = x2 in dv = cos dx. Potem je du = 2xdx in v = sin x.Torej je
∫x2 cos x = x2 sin x− ∫
2x sin xdx = x2 sin x− 2∫
x sin xdx. Integral∫x sin xdx izracunamo tako, da za ta integral se enkrat uporabimo integracijo
po delih. Naj bo u = x in dv = sin xdx. Tedaj je du = dx, v = − cos x in∫x sin xdx = −x cos x +
∫cos xdx = −x cos x + sin x. Skratka
∫x2 cos x = x2 sin x− 2
∫x sin xdx = x2 sin x− 2(−x cos x + sin x) + C =
x2 sin x + 2x cos x− 2 sin x + C.

206 POGLAVJE 13. INTEGRAL
Slika 13.6: Slika k nalogi 10.
10. Izracunajmo ploscino lika, ki je omejen s krivuljama y = x2
5in y = x− 6
5.
Resitev: Najprej moramo dolociti integracijske meje in skicirati grafa obehfunkcij (Slika 13.6). Dolociti moramo prvi koordinati presecisc obeh krivulj.Dobimo ju iz enacbe
x2
5= x− 6
5.
Ce enacbo pomnozimo s 5, dobimo
x2 − 5x + 6 = 0.
Tako je x1 = 2 in x2 = 3. Iskana ploscina je enaka
S =∫ 3
2(−x2
5+ x− 6
5)dx = 1
30.

Literatura
[1] J. Brencic, F. Lazarini, Splosna in anorganska kemija: za gimnazije, strokovnein tehniske sole, DZS, Ljubljana (1992).
[2] N. Bukovec, J. Brencic, Kemija za gimnazije 1, DZS, Ljubljana (2000).
[3] M. Fosner, A. Fosner, Matematika[elektronski vir]: univerzitetni ucbenik, Fakul-teta za logistiko, Celje (2008).
[4] D. Kavka, Matematika v srednji soli, Modrijan, Ljubljana (2006).
[5] P. Legisa, Matematika:drugi letnik, DZS, Ljubljana (1997).
[6] J. Lep, Matematika z vajami in nalogami - Prirocnik za samostojni studij - 1.zvezek, Fakulteta za gradbenistvo Univerze v Mariboru, Maribor (1995).
[7] J. Lep, Matematika z vajami in nalogami - Prirocnik za samostojni studij - 2.zvezek, Fakulteta za gradbenistvo Univerze v Mariboru, Maribor (1995).
[8] P. Mizori Oblak, Matematika za studente tehnike in naravoslovja, 1.del, Fakul-teta za strojnistvo, Ljubljana (1994).
[9] G. Pavlic, M. Rugelj, J. Sparovec, D. Kavka, Planum, Modrijan, Ljubljana(2006).
[10] M. Radic, Sistemi linearnih jednadzbi i linearno programiranje, Skolska knjiga,Zagreb (1974).
[11] A. Vadnal, Linearno programiranje, DMFA Slovenije, Ljubljana (1994).
[12] I. Vidav, Visja matematika, DMFA Slovenije, Ljubljana (1994).
207
Stvarno kazalo
ε-okolica tocke, 108
Cramerjevo pravilo, 37
determinanta, 18razvoj po stolpcu, 22razvoj po vrstici, 22
diferencni kolicnik, 171diferenca, 106dolocen integral, 199
elementarne transformacije, 36
funkcija, 125asimptota, 126, 149definicijsko obmocje, 125eksponentna, 153graf, 126inverzna, 128kompozitum funkcij, 128konkavna na intervalu, 182konveksna na intervalu, 181korenska, 143kosinus, 160kotangens, 161kvadratna, 133liha, 128limita, 170linearna, 129narascajoca na intervalu, 127navpicna asimptota, 149negativna na intervalu, 127nicla, 127odvedljiva, 172
padajoca na intervalu, 127pol, 149polinom, 146potencna, 140pozitivna na intervalu, 127prevoj, 182racionalna, 148realna, 125, 169sinus, 159soda, 127tangens, 160tocka nedolocenosti, 177zacetna vrednost, 127zaloga vrednosti, 125zvezna, 171zvezna v tocki, 171
Gaussova eliminacijska metoda, 40
integralintegralski znak, 191integrand, 191integriranje, 191nedoloceni, 191
integriranje po delih, 193
koren, 139kotne funkcije, 158
L’Hospitalovo pravilo, 177linearna kombinacija vektorjev, 71linearno programiranje
dualni linearni problem, 56graficna metoda, 53
208
STVARNO KAZALO 209
namenska funkcija, 53odprt transportni problem, 60omejitve, 53prehrambeni problem, 56primarni linearni problem, 56splosni problem, 53transportni problem, 60zaprt transportni problem, 60
maksimumglobalni, 179lokalni, 179
matrika, 25adjungirana, 29enotska, 29inverzna, 30kvadratna, 28mnozenje s skalarjem, 26podobna, 30rang, 30spodnje trikotna, 29transponirana, 28vsota, 26zgornje trikotna, 29
minimumglobalni, 179lokalni, 178
obrestno obrestovanje, 108odvod, 172
drugi, 178tretji, 178
parabola, 133teme, 134
poddeterminanta, 21potenca, 138premica, 129
enacba, 132smerni koeficient, 130
produkt, 27
radian, 157
sekanta, 172sistem enacb, 35
dolocen, 36homogeni, 36nedolocen, 36nehomogeni, 36protisloven, 36
skalar, 69
tangenta, 174Taylorjeva formula, 185
vektor, 69enacba ravnine v prostoru, 83enacba premice v prostoru, 81enotski, 69kolinearni vektorji, 70komplanarni vektorji, 70krajevni, 73linearno neodisni vektorji , 72linearno odvisni vektorji, 72mesani produkt, 79nasprotni, 70nic, 69produkt vektorja s skalarjem, 71prosti, 69razlika vektorjev, 70sestevanje, 70skalarni produkt, 75vektorski produkt, 77vezan na premico, 69vezan na tocko, 69
vrsta, 117absolutno konvergentna, 122alternirajoca, 122D’ Alambertov kriterij, 120divergentna, 117geometrijska, 118konvergentna, 117, 119

210 STVARNO KAZALO
majoranta, 120pogojno konvergentna, 122Raabejev kriterij, 121s pozitivnimi cleni, 119Taylorjeva, 185vsota, 117
zaporedje, 103alternirajoce, 105aritmeticno, 106divergentno, 109Fibonaccijevo, 104geometrijsko, 107konvergentno, 109limita, 109monotono, 105narascajoce, 104natancna spodnja meja, 105natancna zgornja meja, 105navzdol omejeno, 105navzgor omejeno, 105omejeno, 105padajoce, 104podzaporedje, 104spodnja meja, 105stekalisce, 109strogo narascajoce, 104strogo padajoce, 105zgornja meja, 105