system sterowania silnikiem krokowym w ukŁadzie … · 2020-03-10 · nych poprzez rozbudowę...
TRANSCRIPT

Politechnika Poznańska
Wydział Informatyki i Zarządzania
Katedra Inżynierii Komputerowej
Praca dyplomowa inżynierska
SYSTEM STEROWANIA SILNIKIEM KROKOWYM
W UKŁADZIE OTWARTYM
Anna Cieśnik
Dawid Jasiak
Łukasz Szulc
Promotor
dr inż. Sławomir Stępień
Poznań, 2007 r.

Tutaj przychodzi karta pracy dyplomowej;
oryginał wstawiamy do wersji dla archiwum PP, w pozostałych kopiach wstawiamy
ksero.

Spis treści
1 Wstęp 1
1.1 Motywacje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Cel i zakres pracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Struktura pracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Silnik krokowy 5
2.1 Wprowadzanie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Budowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 Wstęp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.2 Budowa silników hybrydowych . . . . . . . . . . . . . . . . . . 8
2.3 Zasada działania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.1 Wpływ budowy silnika na sterowanie . . . . . . . . . . . . . . 11
2.3.2 Silniki unipolarne . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.3 Sterowanie unipolarne i bipolarne . . . . . . . . . . . . . . . . 13
2.4 Sterowanie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4.1 Sterowanie pełnokrokowe . . . . . . . . . . . . . . . . . . . . . 14
2.4.2 Sterowanie półkrokowe . . . . . . . . . . . . . . . . . . . . . . 15
2.4.3 Sterowanie mikrokrokowe . . . . . . . . . . . . . . . . . . . . . 16
2.4.4 Sterowanie unipolarne i bipolarne . . . . . . . . . . . . . . . . 17
2.5 Właściwości . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.5.1 Moc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.5.2 Dokładność pozycjonowania . . . . . . . . . . . . . . . . . . . 19
2.5.3 Moment silnika krokowego . . . . . . . . . . . . . . . . . . . . 20
2.5.4 Częstotliwość . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5.5 Drgania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6 Opis silnika typu BYG57 081D . . . . . . . . . . . . . . . . . . . . . 24
3 Opracowany system sterowania 25
3.1 Założenia projektu . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Przebieg prac nad projektem . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Budowa i funkcjonalność układu przed modyfikacją stanowiska . . . . 27
I

II
3.3.1 Budowa stanowiska . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3.2 Opis poszczególnych urządzeń . . . . . . . . . . . . . . . . . . 28
3.4 Projekt i realizacja nowego stanowiska . . . . . . . . . . . . . . . . . 35
3.4.1 Wyprowadzenie sygnałów z urządzeń zewnętrznych na płytkę . 35
3.4.2 Komunikacja PC — PEdASK . . . . . . . . . . . . . . . . . . 36
3.5 Płytka edukacyjna do analizy silnika krokowego — PEdASK . . . . . 40
3.5.1 Wskazówki do projektowania układów z elementami cyfrowymi 40
3.5.2 Układ optoizolacji wejścia . . . . . . . . . . . . . . . . . . . . 42
3.5.3 Układ multipleksowania sygnałów sterujących . . . . . . . . . 42
3.5.4 Układ wyzwalania przerwania sprzętowego . . . . . . . . . . . 44
3.5.5 Konfiguracja uzwojeń silnika . . . . . . . . . . . . . . . . . . . 44
3.5.6 Wyprowadzenie sygnałów typu OC . . . . . . . . . . . . . . . 46
3.5.7 Zasilanie układu . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.6 Dokumentacja elektroniki PEdASK . . . . . . . . . . . . . . . . . . . 47
3.7 Płytka drukowana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.7.1 Zasady projektowania płytki drukowanej . . . . . . . . . . . . 47
3.7.2 Projekt PCB płytki drukowanej PEdASK . . . . . . . . . . . 49
3.7.3 Wizualizacja płytki . . . . . . . . . . . . . . . . . . . . . . . . 49
3.7.4 Technologia wykonania płytki drukowanej . . . . . . . . . . . 50
3.8 Zasada działania układu . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.8.1 Możliwe konfiguracje układu . . . . . . . . . . . . . . . . . . . 52
3.8.2 Opis działania układu PEdASK . . . . . . . . . . . . . . . . . 53
3.9 Montaż układu w poszczególnych konfiguracjach . . . . . . . . . . . . 56
3.9.1 0 tryb pracy — praca wyłącznie na urządzaniach przemysłowych 56
3.9.2 1 tryb pracy — sterowanie z ZD100, pomiary na licznikach . . 59
3.9.3 2 tryb pracy — jednoczesne wykorzystanie komputera i urzą-
dzeń do sterowania/pomiarów . . . . . . . . . . . . . . . . . . 60
3.9.4 3 tryb pracy — sterowanie i pomiar na komputerze . . . . . . 60
3.10 Zbudowane stanowisko do badania własności silnika krokowego . . . . 61
3.11 Pomiary i ograniczenia . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.12 Zalecenia użytkowania układu . . . . . . . . . . . . . . . . . . . . . . 63
3.13 Wnioski . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4 Oprogramowanie 68
4.1 Ogólny opis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.2 Założenia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.3 Opis portu LPT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.4 Przeznaczenie sterownika systemowego . . . . . . . . . . . . . . . . . 71
4.5 Moduły aplikacji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.5.1 Obiekt obsługi sterownika . . . . . . . . . . . . . . . . . . . . 73

III
4.5.2 Obiekt przetwarzania danych . . . . . . . . . . . . . . . . . . 73
4.5.3 Obiekt generujący trajektorię . . . . . . . . . . . . . . . . . . 73
4.6 Współpraca elementów . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.6.1 Odczyt danych ze sterownika . . . . . . . . . . . . . . . . . . 74
4.6.2 Zapis danych do sterownika . . . . . . . . . . . . . . . . . . . 74
4.6.3 Praca programu w trybie ZD100 . . . . . . . . . . . . . . . . . 74
4.6.4 Praca programu w trybie PCHost . . . . . . . . . . . . . . . . 75
4.6.5 Możliwe błędy . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.7 Interfejs użytkownika . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.7.1 Opis elementów graficznych . . . . . . . . . . . . . . . . . . . 76
4.7.2 Opis użytkowania . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.7.3 Opis funkcji przycisków okna przygotowania trajektorii . . . . 80
4.8 Formaty plików . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.8.1 Plik trajektorii . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.8.2 Plik danych pomiarowych . . . . . . . . . . . . . . . . . . . . 85
4.9 Przetwarzanie danych . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.9.1 Dane sterowania . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.9.2 Dane enkodera . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5 Wyniki doświadczeń 88
5.1 Wstęp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.2 Zadawanie trajektorii . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.3 Prędkość chwilowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.4 Badanie przebiegów sterowania . . . . . . . . . . . . . . . . . . . . . 91
5.5 Ustalanie się pozycji rotora . . . . . . . . . . . . . . . . . . . . . . . . 91
5.6 Badanie dokładności pozycjonowania . . . . . . . . . . . . . . . . . . 94
5.7 Propozycje ćwiczeń dla studentów . . . . . . . . . . . . . . . . . . . . 95
6 Zakończenie 96
A Dokumentacja techniczna 97
A.1 Płytka drukowana PEdASK . . . . . . . . . . . . . . . . . . . . . . . 97
A.2 Wzory opisu na pleksie . . . . . . . . . . . . . . . . . . . . . . . . . . 99
A.3 Skrócony katalog układów scalonych wykorzystanych do budowy płytki
drukowanej PEdASK . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Literatura 103

Rozdział 1
Wstęp
1.1 Motywacje
Motywacją do podjęcia zagadnienia sterowania i badania silników krokowych
jako tematu niniejszej pracy inżynierskiej, były ich liczne zalety oraz aktualność
tematyki i powszechność stosowania we współczesnym przemyśle, których liczne
przykłady zostaną zaprezentowane poniżej [5, 4, 1, 21, 12, 7, 6].
Wychodząc z definicji silnika krokowego, należy zaliczyć go do grupy silników
elektrycznych, w którym impulsowe zasilanie prądem elektrycznym powoduje obrót
wirnika o ściśle ustalony kąt. Dzięki temu, kąt obrotu wirnika jest ściśle powiązany
z liczbą dostarczonych impulsów prądowych. Z kolei prędkość kątowa wirnika jest
adekwatna do iloczynu częstotliwości tych impulsów i wartości jednostkowego kąta
obrotu wirnika [5].
Jednostkowy kąt obrotu zależy od klasy i konkretnego typu silnika i mieści się
najczęściej w zakresie kilku – kilkudziesięciu stopni.
Silniki krokowe w zależności od ich przeznaczenia mają budowę przystosowaną do
wykonywania od ułamków obrotu na sekundę do kilku tysięcy obrotów w skrajnych
przypadkach [5].
Do najważniejszych zalet silników krokowych zalicza się:
• Prawidłowo zaprojektowane napędy dają dużą powtarzalność wykonywanych
ruchów, dobre silniki krokowe mają dokładność nawet bliską 3–5% kroku i błąd
ten nie kumuluje się z kroku na krok.
• Liniowa zależność obrotu silnika od ilości impulsów sterujących.
• Prosta kontrola pracy silnika i jego obrotu w jednostce czasu.
• Niezawodność — dzięki budowie silnika bez szczotek, co uzależnia żywotność
silnika wyłącznie od żywotności łożysk.
• Możliwość bardzo szybkiego rozbiegu, hamowania i zmiany kierunku obrotu.
1

1.1. Motywacje 2
• Zależność kąta obrotu silnika od impulsów dyskretnych w czasie, co umożliwia
sterowanie w pętli otwartej. Cecha ta sprawia, że silniki krokowe stają się
łatwiejsze i przede wszystkim tańsze w sterowaniu.
Pierwsze konstrukcje ramienia głowicy dysków twardych oraz stacji dysków i dys-
kietek wykorzystywały silniki krokowe. Po dziś dzień są stosowane w napędach
drukarek, skanerów, kserokopiarek, ploterach i wielu innych urządzeniach.
Silniki krokowe są coraz częściej używane, m.in. w układach programowego
sterowania (liniach produkcyjnych, obrabiarkach CNC, manipulatorach, robotach)
[1, 21]. Należą do nich również przyrządy rejestrujące.
W większości tych zastosowań, silnik oprócz funkcji napędu, pełni także rolę
urządzenia pozycjonującego, w których podstawowym parametrem konstrukcyjnym
i użytkowym jest precyzja pozycjonowania — przez którą należy rozumieć dokład-
ność osiągania zadanej pozycji lub powtarzalność wykonywania zadanych ruchów
[12].
Obszar zastosowania silników krokowych zdecydowanie powiększa się. Dzieje się
tak, m.in. za sprawą techniki mikroprocesorowej umożliwiającej realizację złożonych
funkcji sterowania [7].
Systemy z silnikami krokowymi są wykorzystywane wszędzie tam, gdzie ważne
jest sterowanie złożonymi ruchami, ustalaniem położeń oraz dokładne zatrzymanie
mechanizmów w ściśle określonym miejscu, sterowanie procesów chemicznych oraz
cieplnych, kontrola i regulacja położenia [7, 12, 21, 6].
Silniki krokowe znajduje się [21] m.in. w napędach prętów spowalniających re-
akcje jądrowe, w napędach mostów zwodzonych i w automatyce wolnozmiennych
procesów przemysłowych (napęd zaworów, zasuw, przesłon itp.), gdzie ich duża
trwałość i prostota sterowania mają szczególne znaczenie.
Zatem spektrum zastosowań silników krokowych jest bardzo szerokie, co powo-
duje dynamiczny rozwój badań oraz poszukiwania nowych rozwiązań sterowania we
współczesnym przemyśle.
Możliwość precyzyjnego sterowania w pętli otwartej jest podawana za jedną
z największych zalet silników krokowych. Oznacza ona, że nie jest konieczne sprzę-
żenie zwrotne — czyli informacja o aktualnym położeniu wału silnika. Takie stero-
wanie eliminuje potrzebę stosowania kosztownych urządzeń sprzężenia zwrotnego,
jak np: przetworniki optoelektroniczne czy obrotowo-impulsowe. Pozycję silnika,
w ogólności można wyznaczyć na podstawie zliczanych impulsy wejściowych.
Natomiast główna motywacja rozbudowy stanowiska oraz stworzenia własnego
systemu sterowania wynika z niepożądanych zjawisk zachodzących przy pracy silni-
ków krokowych, m.in.:
• Rezonanse mechaniczne pojawiające się przy niewłaściwym sterowaniu.
• Trudności przy pracy z bardzo dużymi prędkościami.

1.2. Cel i zakres pracy 3
Należy mieć świadomość ich występowania.
1.2 Cel i zakres pracy
Celem niniejszej pracy inżynierskiej było opracowanie kompletnego systemu ste-
rowania silnikiem krokowym w układzie otwartym dla celów badawczych i edukacyj-
nych poprzez rozbudowę istniejącego stanowiska w laboratorium analizy elementów
wykonawczych automatyki w Katedrze Inżynierii Komputerowej.
Zakres pracy inżynierskiej obejmował zaproponowanie oraz wykonanie systemu
komputerowego sterowania i analizy pracy silnika na podstawie istniejącego stanowi-
ska. Istniała możliwość wykorzystania oprogramowania firmy WObit do sterowania
i pobierania danych pracy silnika. Jednak takie rozwiązanie wymagało wymiany
liczników na nowsze. Ponadto firmowe oprogramowanie ograniczało możliwość dal-
szej rozbudowy i sterowania silnikiem w pętli zamkniętej.
Ograniczono koszty finansowe wymiany podzespołów, rozważając możliwość omi-
nięcia ich, co zmniejszy koszty zasilania i zajmowanego miejsca, co miało by duży
wpływ przy zastosowaniu takiego układu w przemyśle.
Na podstawie powyższej analizy w ramach pracy inżynierskiej zaprojektowano
i zbudowano układ elektroniczny umożliwiający trzy rodzaje pracy wykorzystujące
wszystkie możliwości:
• bezpośrednie sterowanie z zadajnika ZD 100 oraz z wykorzystaniem firmowego
oprogramowania, odczyt pracy silnika na licznikach MD 100 i LP 100;
• sterowanie za pomocą zadajnika i analiza pracy na komputerze;
• sterowanie i jednoczesna analiza pracy silnika z jednoczesną możliwością od-
czytu pomiarów z liczników.
Ostatnie dwa tryby pracy wykorzystują oprogramowanie stworzone w ramach pracy
inżynierskiej. Program ten komunikuje się poprzez równoległy port LPT z powsta-
łym układem elektronicznym, nazywanym dalej PEDASK — płytka edukacyjna do
analizy silnika krokowego. Dokładność przesyłanych danych do komputera zapew-
nia układ generujący przerwania sprzętowe w odpowiedzi na sygnały pochodzące
z przetwornika obrotowo–impulsowego. Komunikacja z płytką PEdASK została
zrealizowana przez dedykowany sterownik, który powstał jako część niniejszej pracy
inżynierskiej. Wykorzystuje on przerwania generowane przez kontroler portu równo-
ległego do pobierania danych z płytki edukacyjnej z możliwie dokładnym pomiarem
czasu. Dzięki rozbudowie układu i powstałemu oprogramowaniu przeprowadzono
szereg doświadczeń.

1.3. Struktura pracy 4
1.3 Struktura pracy
Struktura pracy jest następująca. W rozdziale 1 przedstawiono cel i zakres pracy
oraz uzasadnienie obranego rozwiązania.
Rozdział 2 zawiera przegląd literatury oraz podstawy teoretyczne obejmujące
podział silników ze względu na budowę i zasadę działania. Rodzaje sterowania,
opis pracy pełnokrokowej i mikrokrokowej. Właściwości mechaniczne, dynamiczne
i elektryczne oraz parametry techniczne badanego silnika.
Rozdział 3 jest poświęcony elektronicznej części pracy, którą rozpoczyna opis
stanowiska przed i po rozbudowie oraz założenia dotyczące pracy całego układu.
W dalszej części przedstawiony jest projekt oraz sposób wykonania układu elektro-
nicznego, uzupełnione dokumentacją techniczną i użytkową stanowiska. Wnioski
powstałe z budowy układu kończą tę część pracy.
Rozdział 4 został poświęcony powstałej aplikacji do sterowania silnikiem oraz
dokonywania pomiarów i analiz. Zawiera m.in założenia projektowe aplikacji, opis
komunikacji z częścią sprzętową, dwa możliwe tryby pracy programu, algorytm dzia-
łania i dokumentację użytkową oprogramowania.
Rozdział 5 zawiera opis badań i przeprowadzonych doświadczeń oraz propozycję
ćwiczeń dla studentów na powstałym, w pełni funkcjonalnym stanowisku laborato-
ryjnym.
Rozdział 6 stanowi podsumowanie pracy z dyskusją na temat przyjętych metod
analizy i sterowania silnikami krokowymi.
W dodatku A zamieszczono przydatne schematy, szablony oraz skrócony katalog
układów scalonych wykorzystanych w niniejszej pracy.

Rozdział 2
Silnik krokowy
2.1 Wprowadzanie
Zbudowanie dobrze zaprojektowanego systemu sterowania silnika możliwe jest
tylko poprzez poznanie zasady działania, budowy napędu, zrozumienie reguł stero-
wania, a także dokładną analizę jego parametrów.
Silnik krokowy inaczej zwany silnikiem skokowym, to silnik elektryczny syn-
chroniczny przetwarzający ciąg impulsów elektrycznych w mechaniczne, skokowe
(dyskretne) przesunięcie wału lub wirnika [21], proporcjonalne do liczby impulsów,
z prędkością proporcjonalną do częstotliwości tych impulsów. Do istotnych zalet
[7] tego napędu można zaliczyć łatwe sterowanie prędkością, możliwość zmiany kie-
runku, dużą niezawodność oraz prostotę sterowania .
Cechą charakterystyczną napędu krokowego jest zajmowanie przez wirnik usta-
lonych położeń odległych od siebie o krotność skoku wynikającą z liczby zadanych
impulsów sterujących bez sumowania błędów skoków, co umożliwia zastosowanie
tego silnika w otwartych układach sterowania.
Wykorzystanie zjawisk fizycznych jest podstawą do budowy wszelkich urządzeń
elektrycznych, a przede wszystkim silników. Dlatego warto zwrócić uwagę na zja-
wiska, które nimi rządzą, by łatwiej można było zrozumieć zasadę działania i wy-
korzystać tą wiedzę w celu lepszego sterowania.
Wykorzystanie elektromagnesu przy budowie silników krokowych
Przepływ prądu przez cewkę nawiniętą na rdzeń ferromagnetyczny powoduje
powstawanie pola magnetycznego, którego obieg przechodzi przez rdzeń. Ilustrację
tego zjawiska przedstawiono na rysunku 2.1.
5

2.1. Wprowadzanie 6
Rysunek 2.1: Powstawanie strumienia indukcji magnetycznej
Pole magnetyczne przyciąga pozostałą część rdzenia — układ dąży do zmniej-
szenia oporu magnetycznego, czyli reluktancji, po to by przy danej sile magnetomo-
torycznej wytworzonej przez cewkę, powstał jak największy strumień magnetyczny
Φ:
Φ =I · zRm
(2.1)
gdzie:
I — prąd,
z — liczba zwojów,
Rm — reluktancja.
Indukcja
Zmiana wartości strumienia magnetycznego, przebiegającego przez obszar objęty
przewodnikiem oraz jego relacja z polem elektrycznym indukowanym wokół tego
przewodnika określa prawo indukcji elektromagnetycznej Faradaya. Prawo to można
przedstawić za pomocą wzoru:
V =
∮l
E · dl = −dΦB
dt(2.2)
gdzie:
ΦB — strumień indukcji magnetycznej,
V — siła elektromotoryczna powstająca w pętli,
E — natężenie wyindukowanego pola elektrycznego.

2.2. Budowa 7
Rysunek 2.2: Oddziaływanie strumienia na wał – analogia do prądnicy
Proste zależności elektromagnesów
Elektromagnes można określić jako element elektryczny zbudowany z cewki nawi-
niętej na rdzeniu ferromagnetycznym, który jest wykonany zazwyczaj z miękkiego
żelaza. Pod wpływem przepływającego przez cewkę prądu elektrycznego wytwa-
rzane jest pole magnetyczne.
Rysunek 2.3: Zjawisko przyciągania elektromagnesu
Rysunek 2.4: Zjawisko odpychania elektromagnesu
2.2 Budowa
2.2.1 Wstęp
Najczęściej stosowane obecnie silniki krokowe to silniki hybrydowe, które posia-
dają zarówno właściwości jak i zalety silników o zmiennej reluktancji (ang. Variable

2.2. Budowa 8
Reluctance) oraz silników z magnesem stałym (ang. Permanent Magnet). Zostały
one oznaczone przez skrót HB, pochodzący od słowa ang. hybrid.
Silnik hybrydowy łączy w sobie zalety silnika ze zmienną reluktancją i silnika
z magnesem stałym. Silnik VR ma prostą konstrukcję, w której główną rolę odgrywa
rotor o wielu zębach wykonany z miękkiej stali oraz stojana wraz z uzwojeniami.
Kiedy przez zwoje stojana przepływa prąd stały, bieguny namagnesowują się, co
powoduje, że przyciągają zęby rotora. Na skutek przełączania biegunów stojana
wirnik obraca się.
W silniku PM rotor nie posiada zębów, lecz jest namagnesowany naprzemiennie
osiowo poprzez bieguny N i S, w taki sposób by były rozmieszczone wzdłuż linii
prostej równoległej do osi wirnika. Silniki z magnesem trwałym cechuje zwiększona
indukcja magnetyczna w wyniku namagnesowania biegunów wirnika, co pozytywnie
wpływa na charakterystykę momentu.
Podstawową zaletą silników VR jest rozdzielczość, która ze względu na duże
możliwości sterowania jest najważniejsza. Natomiast w silnikach PM [19] wraz ze
wzrostem rozdzielczości maleje ich dynamika . Właśnie dlatego połączono zasadę
działania i właściwości obu silników w silnik hybrydowy.
2.2.2 Budowa silników hybrydowych
Można stwierdzić, że kąt kroku w mierze elektrycznej [21] jest tym mniejszy, im
większa jest liczba taktów (komutacji) k i kąt ten można zdefiniować jako:
αe =2π
k(2.3)
Zmniejszanie ilości kroków można realizować na drodze projektowania silników
poprzez zwiększanie liczby par biegunów p w silnikach spolaryzowanych magnetycz-
nie, zwiększaniu zębów Zr wirnika ferromagnetycznego w silnikach reluktancyjnych
oraz liczby m niezależnych cewek skupionych uzwojenia stojana. Właśnie z tego
powodu istnieje dużo silników o różnej konstrukcji. W wyniku zwiększenia liczby
kroków w silnikach z wirnikiem czynnym (elektromagnetycznym), można przedsta-
wić wzór na kąt kroku w następujący sposób:
α =2π
p · k(2.4)
a dla silników z wirnikiem biernym:
α =2π
Zr · k(2.5)
Silnik hybrydowy składa się z magnesu trwałego, w którym bieguny magnesu
są umieszczone osiowo (2.5, co jest charakterystyczne dla tego rodzaju silników,

2.2. Budowa 9
w przeciwieństwie do silników z magnesem trwałym, w których bieguny są umiesz-
czone promieniście.
Rysunek 2.5: Przedstawienie osiowego namagnesowania rotora
Część bieguna położona najbliżej wirnika posiadają małe kanaliki z wypustkami
tzw. ząbkami. Podobna konstrukcja dotyczy wirnika, lecz w tym przypadku są to
dwie sekcje, zgodne z osiowym namagnesowaniem wirnika. Należy także zauważyć,
że kanaliki nie są ciągłe jak w przypadku stojana, a dolne zęby wirnika są przesu-
nięte w stosunku do górnych o połowę zęba, co jest przedstawione na fotografii 2.7.
Takie rozmieszczenie powoduje, że stojan bez zasilania wymusza umiejscowienie
wirnika w konkretnej pozycji, w której zęby obydwu części były jak najbliżej sie-
bie — co jest spowodowane zmniejszeniem oporności indukcyjnej, by strumień pola
magnetycznego przepływał przez ferromagnetyk, a nie przez powietrze.
Rysunek 2.6: Rozmieszczenie biegunów oraz zębów na stojanie

2.3. Zasada działania 10
Powodem budowy tak skomplikowanej konstrukcji jest zwiększenie podstawowej
liczby kroków, bez dodatkowego mnożenia liczby biegunów. Zgodnie ze wzorem 2.5
liczba zębów wyznacza jednostkowy krok silnika hybrydowego. Silnik przedstawiony
na rysunku 2.6 posiada ilość zębów oraz cewek odpowiadającą 7,2o — czyli 50
podstawowych kroków.
Rysunek 2.7: Przedstawienie typowego wirnika silnika hybrydowego
Rysunek 2.8: Stojan silnika hybrydowego z uzwojeniami
2.3 Zasada działania
Generowane impulsy sterujące powodują zasilenie uzwojeń silnika krokowego od-
powiednim układem napięć, utrzymywanych na uzwojeniach aż do pojawienia się
kolejnego impulsu, który sprawia, że zmienia się układ napięć. Powoduje to zmianę
rozpływu prądów płynących w uzwojeniach, co jest związane ze zmianą kierunku
strumienia magnetycznego, czego konsekwencją jest obrót silnika o określony kąt
zwany krokiem. Można zatem stwierdzić, że zasada działania silników krokowych

2.3. Zasada działania 11
opiera się głównie o wirujące pole magnetyczne, które można wytworzyć poprzez
zmianę kierunku prądu w uzwojeniach.
Cykl komutacji obejmuje taką liczbę stanów napięć zasilających uzwojenia po
przekroczeniu, której stany te zaczynają cyklicznie się powtarzać. Przez takt komu-
tacji należy rozumieć każdy stan układu napięć [21].
Silniki PM i HB mają po kilka biegunów. Zawierają jednak tylko dwa uzwojenia
podzielone na sekcje, dlatego doskonałym punktem wyjścia do analizy sterowania
jest model tylko z dwoma uzwojeniami [19]. Można wyróżnić trzy sposoby stero-
wania takimi silnikami. Pierwszy z nich opiera się o wykorzystanie dwóch mostków
tranzystorowych typu H, jednak realizacja nie jest najłatwiejsza i stosuje się dwie
pozostałe metody wprowadzające podział silników krokowych na silniki bipolarne
i unipolarne.
2.3.1 Wpływ budowy silnika na sterowanie
Rozbudowana konstrukcja silnika hybrydowego została wypracowana na bazie
doświadczeń z silnikami reluktancyjnymi oraz z magnesem trwałym. Dzięki więk-
szej ilości zębów na wirniku oraz na stojanie możliwe było zmniejszenie wielkości
kroku — mniejszy krok świadczy o dokładniejszym pozycjonowaniu, co oznacza,
że bardziej korzystne są układy o największej ilości taktów w cyklu.
Rysunek 2.9: Przekrój poziomy przez silnik hybrydowy (A)
Powyższy rysunek przedstawia rozmieszczenie zębów wirnika i zębów stojana
w sytuacji, gdy układ jest w stanie spoczynku. Układ pobudzony poprzez zmianę na-
pięcia w uzwojeniach spowodowałby obrót wirnika, co wynika bezpośrednio z Prawa
Coulomba dla magnesów:
F = k ·m1 · m2
r2(2.6)
gdzie:

2.3. Zasada działania 12
F — siła wzajemnego oddziaływania dwóch biegunów magnetycznych,
m1, m2 — ładunki magnetyczne [Wb = V · s],r — odległość między ładunkami,
k — współczynnik proporcjonalności: k = 1/4πµ, przy czym: µ = µr · µ0
Rysunek 2.10: Przekrój poziomy przez silnik hybrydowy (B)
Analizując rysunki 2.9 oraz 2.10 należy zauważyć, że przedstawiono dwa prze-
kroje poziome silnika i zarówno dolna cześć układu jak i górna część rotora ze od-
działują ze stojanem. Ustawienie wirnika górnego bieguna współgra z ustawieniem
dolnego bieguna wirnika, osiągając stan równowagi. Każdy z pojedynczych kroków
należy rozpatrywać, jako osobny stan równowagi magnetycznej, które w połącze-
niu ze szybkimi przełączeniami uzwojeń stojana powodują ruch obrotowy z bardzo
dokładnym pozycjonowaniem, którym można sterować.
2.3.2 Silniki unipolarne
Uproszczenie sterowania silnikiem dokonuje się poprzez zastosowanie uzwojenia
z odczepem w środku [19], który jest połączony ze źródłem prądu. Występuje
tu dzielenie uzwojenia, wskutek czego prąd w jednym cyklu może płynąć przez
jedną część uzwojenia, a następnym cyklu w drugiej części. Zasadę działania silnika
unipolarnego przedstawiono na rysunku 2.11. W związku z tym, że prądy płyną
tylko w jednym kierunku nazywane są silnikami unipolarnymi. Istotną zaletą tych
silników jest łatwość sterowania. Jednak w porównaniu ze silnikami bipolarnymi
mają słabsze osiągi spowodowane nie wykorzystywaniem całości uzwojenia.

2.3. Zasada działania 13
Rysunek 2.11: Przedstawienie sterowania silnika unipolarnego
2.3.3 Sterowanie unipolarne i bipolarne
W silnikach bipolarnych prądy uzwojeń w kolejnych cyklach płyną w obu kierun-
kach, przez co można nazwać je dwubiegunowymi (bipolarnymi). Rozkład prądów
można zaobserwować na rysunku 2.12. Wymagają jednak bardziej skomplikowanego
sterownika wynikającego z ich istotnej zalety — ciągłej pracy całości uzwojeń, czyli
pełne wykorzystanie możliwości silnika. Takie sterowanie daje dużo lepsze osiągi
zwłaszcza przy małych i średnich prędkościach obrotowych. Moment obrotowy jest
wtedy dużo większy. Zasadę działania silnika przedstawiono na rysunku 2.12.

2.4. Sterowanie 14
Rysunek 2.12: Przedstawienie sterowania silnika bipolarnego
2.4 Sterowanie
2.4.1 Sterowanie pełnokrokowe
Po analizie wcześniej przedstawionych sterowań silników można stwierdzić, że wy-
korzystanie uzwojeń jest mało efektywne, gdyż w sterowaniu bipolarnym wykorzy-
stywana jest tylko połowa uzwojeń, a w sterowaniu unipolarnym tylko 25% z całości.
Takie sterowanie nosi nazwę sterowania falowego (ang. wave drive), zwane także ste-
rowaniem pełnokrokowym.
Istnieje sterowanie, które poprzez zasilanie uzwojenia w całości zwiększa powsta-
jący strumień magnetyczny. W takim przypadku bieguny wirnika ustawiają się nie
naprzeciw biegunów stojana, lecz w połowie drogi między nimi — 2.13. Takie stero-
wanie można zastosować zarówno przy silnikach bipolarnych jak i unipolarnych, co

2.4. Sterowanie 15
zwiększa moc oraz moment obrotowy. Sterowanie przedstawione poniżej nazywamy
sterowaniem pełnokrokowym (ang. full step).
Rysunek 2.13: Przedstawienie sterowania pełnokrokowego
Rysunek 2.14: Przedstawienie sterowania pełnokrokowego dla silnika bipolar-
nego
2.4.2 Sterowanie półkrokowe
Najczęściej stosowanym sterowaniem [19] jest sterowanie półkrokowe (ang. half
step), w którym na przemian zasila się jedno oraz dwa uzwojenia, przez co bieguny

2.4. Sterowanie 16
wirnika ustawiają się albo naprzeciw biegunów stojana albo w połowie między nimi
— czyli zastosowanie położeń wirnika ze sterowania ang. full step oraz ang. wave
drive [19]. Osiągi silnika są wprawdzie gorsze, niż przy pracy pełnokrokowej, gdyż
nie są wykorzystywane zawsze wszystkie uzwojenia (od 50% do 100%), lecz pracapółkrokowa ma istotne zalety przedstawione w późniejszych rozdziałach.
Rysunek 2.15: Przedstawienie sterowania półkrokowego dla silnika bipolarnego
Rysunek 2.16: Przebieg sterujący przy pracy półkrokowej silnika bipolarnego
2.4.3 Sterowanie mikrokrokowe
Analizując 2.15 można stwierdzić, że różnicując natężenie prądu w uzwojeniach
silnika krokowego możliwe jest uzyskanie pośrednich położeń wirnika między bie-
gunami. Natomiast na rys 2.16 widać, że przebieg sterujący pracy półkrokowej
uzwojeń silnika przypomina sygnał sinusoidalny prostokątny poprzesuwany wzglę-
dem siebie o π2rad. A zależność, który przebieg jest przesunięty względem drugiego
oznacza kierunek obrotu wirnika. W praktyce wykorzystuje się większy podział
kroków niż 12zastosowany w sterowaniu półkrokowym — dyskretyzację sinusoidy
2.4. Sterowanie 17
napięcia zasilającego przeprowadza się według reguły 2n (n ∈ N), gdzie komutacja
jest symetryczna [19].
Takie różnicowanie powoduje, że wypadkowy przebieg nie jest prostokątny, lecz
bardziej zbliżony do prawdziwej sinusoidy. Zmiana parametru n pozwala sterować
silnik bardziej precyzyjniej i z mniejszymi oscylacjami1.
Dalsza dyskretyzacja czynnika aż do n → ∞ zmieniłaby przebieg w klasycznąfunkcję sinus — do sterowania silnika można byłoby używać przebiegów sinusoidal-
nych przesuniętych w fazie względem siebie o 90 stopni. Jednak taka diametralna
zmiana sterowania skomplikowałaby sterownik, gdyż do zmiany prądów na uzwoje-
niach nie wystarczyłyby tylko cztery klucze tranzystorowe oraz trudno byłoby zaim-
plementować w sterowniku jakże ważną cechę silników krokowych — zatrzymanie
chwilowych wartości prądu w celu zatrzymania wirnika w określonym położeniu.
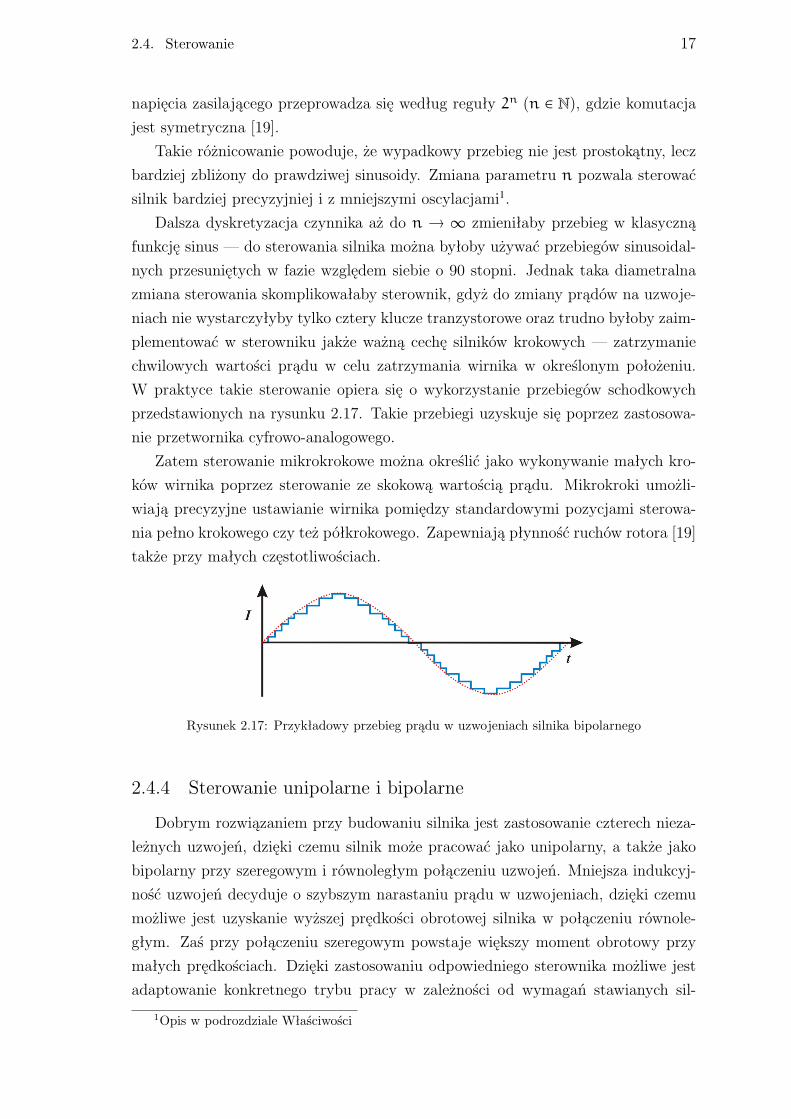
W praktyce takie sterowanie opiera się o wykorzystanie przebiegów schodkowych
przedstawionych na rysunku 2.17. Takie przebiegi uzyskuje się poprzez zastosowa-
nie przetwornika cyfrowo-analogowego.
Zatem sterowanie mikrokrokowe można określić jako wykonywanie małych kro-
ków wirnika poprzez sterowanie ze skokową wartością prądu. Mikrokroki umożli-
wiają precyzyjne ustawianie wirnika pomiędzy standardowymi pozycjami sterowa-
nia pełno krokowego czy też półkrokowego. Zapewniają płynność ruchów rotora [19]
także przy małych częstotliwościach.
Rysunek 2.17: Przykładowy przebieg prądu w uzwojeniach silnika bipolarnego
2.4.4 Sterowanie unipolarne i bipolarne
Dobrym rozwiązaniem przy budowaniu silnika jest zastosowanie czterech nieza-
leżnych uzwojeń, dzięki czemu silnik może pracować jako unipolarny, a także jako
bipolarny przy szeregowym i równoległym połączeniu uzwojeń. Mniejsza indukcyj-
ność uzwojeń decyduje o szybszym narastaniu prądu w uzwojeniach, dzięki czemu
możliwe jest uzyskanie wyższej prędkości obrotowej silnika w połączeniu równole-
głym. Zaś przy połączeniu szeregowym powstaje większy moment obrotowy przy
małych prędkościach. Dzięki zastosowaniu odpowiedniego sterownika możliwe jest
adaptowanie konkretnego trybu pracy w zależności od wymagań stawianych sil-
1Opis w podrozdziale Właściwości

2.5. Właściwości 18
nikowi krokowemu. Proste układy z tranzystorami kluczującymi (ang. H-bridge)
realizujące połączenie szeregowe i równoległe przedstawione są na poniższych ry-
sunkach:
Rysunek 2.18: Układ realizujący sterowanie bipolarne równoległe
Rysunek 2.19: Układy realizujące sterowanie bipolarne szeregowe
2.5 Właściwości
2.5.1 Moc
Typowa moc silników krokowych sterowanych poprzez układy scalone miesz-
czą się w przedziale poniżej 20W, w zależności od wielkości i typu silnika krokowego.Dane producentów silników krokowych zawsze przedstawiają dane o nominalnym
zasilaniu i prądzie płynącym w uzwojeniach, rzadziej przedstawiają informację o
charakterystyce cieplnej silnika [35] czy też maksymalny poziom wydzielanej mocy.
Na podstawie podanych danych można wyliczyć czynną moc napędu na podstawie
wzoru P = U · I, którą należy pomnożyć przez ilość faz silnika:
Pc = U · I · η (2.7)
Zwykle przy projektowaniu układów sterowania bierze się pod uwagę pracę na-
pędu, w której temperatura obudowy silnika nie przekracza 65°C. Dlatego w nie-których przypadkach projektanci montują radiatory na silnikach w celu zwiększania
poziomu dopuszczalnej mocy wydzielanej przez silnik.

2.5. Właściwości 19
2.5.2 Dokładność pozycjonowania
Nawet przy sterowaniu mikrokrokowym o dużym współczynniku n (podział kro-
ków) pojawiają się błędy, ponieważ w dążeniu do zwiększania precyzji i płynności
ruchu nie można osiągnąć ideału [19]. Wielkość błędów zależy głównie od jakości wy-
konania silników, jednak producent zawsze podaje w danych produkcyjnych wielkość
maksymalnego błędu. Jednak nie ma potrzeby dodatkowo komplikować sterownika
i zwiększać liczbę schodków w sterowaniu mikrokrowym, ponieważ zwiększona liczba
zębów w napędzie znacząco zmniejsza pojedynczy krok obecnie produkowanych sil-
ników nawet w sterowaniu pełnokrokowym.
Niedokładność pozycjonowania
Pozycje spoczynkowe pracy mikrokrokowej powstają poprzez różnicowanie prądu
przebiegami sinusoidalnymi. Teoria nie zawsze idzie w parze z praktyką — niedo-
kładność pozycji spoczynkowej [35] określa się jako średnie odchylenie mikrokroko-
wej pozycji spoczynkowej od pozycji teoretycznej w obrębie jednego pełnego obrotu.
Niedokładność ta jest średnią wartością w przedziale całego obrotu, co oznacza,
że nie jest ona funkcją niedokładności przy pracy pełnokrokowej i aby otrzymać
całkowity błąd pozycji należy sumować obie niedokładności.
Histereza
Obserwując pozycję wirnika przy obrotach zgodnych i przeciwnych ze wskazów-
kami zegara można zauważyć histerezę pozycji spoczynkowych. Jest ona spowodo-
wana głównie przez histerezę magnetyczną, ale wpływa na nią także tarcie łożysk
wirnika. Pole magnetyczne rozchodzi się głównie w rdzeniu ferromagnetycznym,
którego przenikalność magnetyczna wpływa na wielkość indukcji magnetycznej.
B = µH (2.8)
gdzie:
B – wielkość indukcji w szczelinie powietrznej
µ – przenikalność magnetyczna rdzenia ferromagnetycznego
H – wartość natężenia pola magnetycznego
Jednak wartość natężenia pola magnetycznego w przypadku silników krokowych
nie jest stała, dlatego indukcja magnetyczną [35] jest funkcją chwilowego natężenia
pola magnetycznego i jego wartości poprzedniej. W przypadku, gdy silnik działa
trybie mikrokrokowym z dużą rozdzielczością, błąd wynikający z histerezy może
przewyższać kilkakrotnie długość mikrokroku.

2.5. Właściwości 20
2.5.3 Moment silnika krokowego
Moment elektromagnetyczny nienasyconej maszyny elektrycznej [21] można wy-
razić jako pochodną energii elektromagnetycznej układuWm względem kąta obrotu
ϑ części ruchomej tej maszyny, w stosunku do nieruchomej osi odniesienia:
Me(ϑ) =dWm
dϑ(2.9)
Sprowadzając uzwojenia silnika krokowego oraz magnes trwały do działania
uzwojenia w postaci dwóch pasm zastępczych w stojanie (s) i w wirniku (r), energię
magnetyczną układu dla stanu ustalonego (ustalone prądy w uzwojeniach) można
wyrazić poprzez sumę energii w stojanie i w wirniku czyli 2.10
Wm = Ws + Wr =1
2(Ψs · Is + Ψr · Ir) (2.10)
Można skorzystać z zależności, w której strumienie skojarzone wirnika i stojana
przedstawiono przez odpowiednie iloczyny prądów i indukcyjności uzwojeń zastęp-
czych jako 2.11
Ψs = Ls(ϑ)Is + Msr(ϑ)IrΨr = Lr(ϑ)Ir + Msr(ϑ)Is (2.11)
gdzie:
Ls – indukcyjność stojana,
Lr – indukcyjność wirnika (rotora),
Msr – indukcyjność wzajemna.
Reasumując, moment elektromagnetyczny można przedstawić poprzez 2.12
Me(ϑ) =1
2I2s
dLs
dϑ+
1
2I2r
dLr
dϑ+ IsIr
dMsr
dϑ(2.12)
Pierwsze dwa człony równania przedstawiają moment reluktancyjny powstający w
wyniku modulacji pola w szczelinie przez poruszający się uzębiony wirnik. Trzeci
człon to moment wzbudzeniowy występujący najczęściej w silnikach z magnesem
trwałym – moment ten przedstawia oddziaływanie na siebie pól stojana i wirnika.
W przypadku dwustronnego uzębienia (także jednostronnego) indukcyjność wła-
sna stojana czy też wirnika, w przypadku, gdy symetryczności zębów można zdefi-
niować funkcję obrotu wirnika przez wzór:
Ls(ϑ) =1
2(Ld + Lq) +
1
2(Ld − Lq) cos Zrϑ (2.13)
gdzie Ld to indukcyjność własna uzwojenia w położeniu wirnika dla minimum reluk-
tancji obwodu, a Lq dla maksimum reluktancji. Korzystając powyższego ze wzoru

2.5. Właściwości 21
na Ls(ϑ), można wyłuskać wzór na moment reluktancyjny:
Mer(ϑ) = −Zr
4I2s(Ld − Lq) sin Zrϑ (2.14)
Przyjmując Msr za indukcyjność wzajemną przy równomiernej szczelinie i sinu-
soidalnym rozkładzie przestrzennym strumienia wirnika, można przedstawić zależ-
ności Msr(ϑ) = Msr cos pϑ, dzięki której definiujemy równanie momentu wzbudze-
niowego:
Mew = −pIsIrMsr sin pϑ = −Mewmax sin ϑe (2.15)
Dzięki powyższym wzorom (2.15, 2.14) można przedstawić charakterystyki ką-
towe momentów silników reluktancyjnych i magnetoelektrycznych jako funkcje sinu-
soidalne (2.20). Analiza owych charakterystyk ukazuje przedział położeń kątowych
wirnika, w którym po zaniknięciu działających sił zewnętrznych na wirnik, wraca on
do wyjściowego punktu równowagi stabilnej — przedział ten określony jako strefę
stabilności statycznej [21], która zawiera się w przedziale −π < ϑe < π. W przy-
padku, gdy bezwzględne odchylenie wirnika przekroczyło półokres momentu, to po
zaniknięciu siły wymuszającej wirnik nie wróci do punktu ϑe = 0, lecz przemieści
się do bliższego zera stabilnego tzn. do położenia ϑe = ±2π.
Rysunek 2.20: Charakterystyka kątowa momentu dla 1 taktu komutacji
W miarę wzrostu momentu obciążenia zapas stabilności statycznej zmniejsza się
od wartości −π + ϑe do 0, to znaczy do wartości kąta, w której moment obciążenia
równy jestMr. Obciążony silnik krokowy wykona więc skok w pożądanym kierunku
tylko wtedy, gdy Mobc < Mr, a biorąc pod uwagę sinusoidalną charakterystykę
kątową momentu warunek wykonania skoku można wyrazić poprzez wzór:
Mobc < Mewmax cosπ
k(2.16)
Zapas stabilności dla biegu jałowego i sekwencji powodującej ruch w prawo lub lewo

2.5. Właściwości 22
można opisać przez:
∆ϑes = ±πk − 2
k(2.17)
k — liczba taktów komutacji w cyklu.
Ze wzrostem k zmniejsza się skok i rośnie strefa stabilności statycznej, co oznacza,
że w przypadku granicznym wirnik silnika krokowego może opóźniać się względem
pola o ±π rad elektrycznych. Z analizy wynika, że ze wzrostem liczby taktów w cyklu
właściwości rozruchowe silnika polepszają się oraz maleje skłonność do wzbudzania
się drgań własnych, ponieważ maleje moment wymuszający drgania, czyli różnica
między Mmax, a Mr staje się mniejsza.
Analizując kątowe przemieszczanie się wirnika względem stojana, w praktyce do
obliczania momentu wytwarzanego przez silnik krokowy stosuje się wzór :
M = Ms sin(ϑs − ϑr) (2.18)
gdzie zależność kąta elektrycznego do kąta mechanicznego można opisać poprzez
ϑe = (k/4)ϑ
2.5.4 Częstotliwość
Na częstotliwość własną f0 układu z silnikiem krokowym wpływają przede wszyst-
kim moment bezwładności IR, moment obciążenia układu Iobc, moment spoczyn-
kowy M0, a także liczba kroków na obrót n. Częstotliwość własną układu można
wyrazić jako:
f0 =1
4π
√nM0
IC
(2.19)
gdzie:
IC = IR + Iobc — całkowity moment układu
W przypadku, kiedy współczynnik tłumienia układu jest dostatecznie mały oraz,
gdy silnik pracuje przy częstotliwości rezonansowej lub blisko niej, istnieje ryzyko
wystąpienia tzw. utraty kroków. W zależności od typu silnika oraz od momentu
bezwładności IC układ może zgubić krok w częstotliwościach równych (f0)j, gdzie
j ∈ Z\ 0. W praktyce uwidaczniają się jednak tylko przy częstotliwościach bliskich
f0.
Występowanie rezonansów wynika z obracania się pola magnetycznego stojana
o nieciągłe wartości kąta elektrycznego, równego w pracy pełnokrokowej ϑe = π/2
oraz w pracy półkrokowej ϑe = π/4. Praca w trybach bez mikrokroków wywołuje
pulsujące dostarczanie energii do wirnika, który zaczyna wpadać w rezonans. Ener-
gię wzbudzającą przekazywaną wirnikowi podczas jednego kroku w stanie jałowym

2.5. Właściwości 23
można wyrazić poprzez:
Ew =4M0
n(1 − cos ϑe) (2.20)
Przez analizę kąta pojedynczego kroku elektrycznego względem energii wzbudza-
jącej można stwierdzić, iż zwiększenie podziału kroku ogranicza energię wzbudza-
jącą rezonans — w przypadku pracy pełnokrokowej do półkrokowej o 70%. W celu
dalszego redukowania oscylacji należałoby zwiększać podział kroku pracy mikrokro-
kowej, jednak można wyeliminować całkowicie drgań, ze względu na to, iż w rze-
czywistości istnieją dodatkowe źródła rezonansu. Należy jednak wysnuć wniosek,
iż stosowanie sterowania mikrokrokowego redukuje wibracje oraz ogranicza wpływ
rezonansu na układ z silnikiem krokowym.
2.5.5 Drgania
Niewątpliwą zaletą działania silników krokowych jest możliwość zasilania za po-
mocą impulsów, gdyż wpływa to na łatwość sterowania. Jednak wirnik i obciążenie
posiadają pewną bezwładność, co powoduje, że sterowanie impulsami prostokątnymi
nie daje idealnie gładkich przemieszczeń [12] wirnika. W rezultacie w wyniku prze-
mieszczenia choćby o jeden krok, można zauważyć drgania przed osiągnięciem stanu
ustalonego. Ważnym aspektem zastosowania silników krokowych jest bardzo duża
precyzja sterowania i aby pozbyć się dużych oscylacji drgań można zastosować silniki
o mniejszym kroku [19], dzięki czemu przy małym skoku powstają także mniejsze
oscylacje. Jest to jeden z problemów sterowania, ponieważ praca silnika przy dość
dużych prędkościach i przy częstotliwości impulsów odpowiadającej mechanicznej
częstotliwości rezonansu może spowodować całkowite drganie silnika.
Rysunek 2.21: Charakterystyka skokowa układu oscylacyjnego

2.6. Opis silnika typu BYG57 081D 24
W praktyce to kłopotliwe zagadnienie rozwiązuje się poprzez stosowanie pracy
półkrokowej oraz mikrokrokowej, która pozwala w prosty i bezpieczny sposób rozsze-
rzyć zakres częstotliwości do dowolnie małych, jednak konieczne jest wtedy zastoso-
wanie podziału kroku większego niż 1/32, kiedy to energia przekazywana wirnikowi
jest tak mała, że zostaje pochłonięta przez wewnętrzne tarcie w silniku. Nie wystę-
pują wtedy żadne drgania, a silnik pozostaje w swym pożądanym położeniu.
2.6 Opis silnika typu BYG57 081D
Wybrany silnik krokowy jest dwufazowym napędem hybrydowym firmy WObit z
serii 57BYG081D posiadającym standardowe momenty obrotowe oraz standardowe
wymiary planszy mocującej. Zakres temperatur −25.. + 40oC. Silnik posiada 8
wyprowadzeń kabli, co oznacza, że może być podłączony jako silnik unipolarny oraz
silnik bipolarny, zarówno w połączeniu równoległym jak i szeregowym, co świadczy
o uniwersalności silnika i możliwości zastosowania go do akademickiego stanowiska.
Silnik hybrydowy należy do silników najnowszego typu o dużych możliwościach.
Podstawowy skok silnika to kąt to 1, 8o, co oznacza, że możliwe jest ustawia-
nie 200 różnych pozycji w pracy pełnokrokowej. Parametr ten wpisuje ten silnik
skokowy do segmentu silników o wysokiej rozdzielczości.
Znamionowe parametry silnika krokowego:
• napięcie 5[V]
• prąd uzwojeń 1[A]
• rezystancja uzwojeń 5[Ω]
• indukcyjność 8,45[mH]
• moment trzymający 52[Ncm]
• moment szczątkowy 450[gcm]
• bezwładność wirnika 110[gcm2]
• długość 51[mm]
• waga 0,6[kg]

Rozdział 3
Opracowany system sterowania
3.1 Założenia projektu
Podstawowe zadanie, umożliwiające dalszy postęp w pracy inżynierskiej, pole-
gało na zaprojektowaniu układu elektronicznego spełniającego następujące założe-
nia funkcjonalne, poszerzone o propozycje projektanta:
• prosta w implementacji komunikacja z komputerem — wybór portu równole-
głego;
• sprzętowe wspomaganie w dokładności pomiarów — układ wyzwalania prze-
rwania;
• dostarczenie sygnałów z przetwornika obrotowo–impulsowego;
• umożliwienie sterowania silnikiem w pętli otwartej — program tworzony w ra-
mach projektu inżynierskiego;
• wyprowadzenie punktów pomiarowych;
• wykorzystanie możliwości połączeń uzwojeń silnika;
• wygodne wyprowadzenie pinów sterujących ze sterownika SMC81 (przełącza-
nie mikrokroków, sygnału zezwolenia, stopu, itd.);
• praca w trzech możliwych konfiguracjach:
1 sterowanie z zadajnika (oraz firmowego programu WinSMC), pomiar na
licznikach;
2 sterowanie z zadajnika (lub komputera — WinSMC), pomiar na kompu-
terze;
3 sterowanie oraz pomiar przez oprogramowanie inżynierskie;
25

3.2. Przebieg prac nad projektem 26
• uniknięcie ograniczeń sprzętowych funkcjonalności programu WinSMC (usta-
wianie mikrokroku w programie i na zworkach sterownika);
• zapewnienie odrębnego zasilania układu w standardzie TTL;
• zasilanie enkodera na poziomie 12V w trzecim trybie pracy układu;
• konwersja napięcia sygnałów z enkodera na standard TTL;
• wykonanie układu ręcznego testowania wyzwalania przerwania sprzętowego;
• wykonanie niezbędnego okablowania;
• naniesienie odpowiednich oznaczeń.
3.2 Przebieg prac nad projektem
W pierwszej kolejności przystąpiono do zapoznania się z budową i funkcjonal-
nością stanowiska podlegającego przebudowie. Zapoznano się z dokumentacją tech-
niczną, sporządzono opis połączeń, przeanalizowano zależności pomiędzy poszcze-
gólnymi układami. Znaleziono nieścisłości w firmowej dokumentacji urządzeń. Zo-
stały zweryfikowane i poprawione błędy w dokumentacji technicznej w porozumieniu
z firmą WObit.
Na podstawie zgromadzonych informacji, przestąpiono do opracowania projektu
układu spełniającego powyżej sprecyzowane założenia. Płytka edukacyjna do ana-
lizy silnika krokowego — nazwana w skrócie PEDASK, ze względu na edukacyjny
charakter tworzonego stanowiska, została wyposażona w reprezentację istotnych sy-
gnałów za pomocą diod świecących. Najważniejsze elementy — gniazda, diody
i przełączniki zostały opisane na bezbarwnej pleksie, zapewniając estetykę i przej-
rzystość układu. Takie wykonanie jednocześnie zabezpieczyło układ przed uszko-
dzeniami i dało możliwość śledzenia sygnałów na mozaice ścieżek płytki drukowanej.
W kolejnych częściach pracy zostaną przedstawione zgodnie z logiką projekto-
wania następujące zagadnienia:
• budowa i funkcjonalność układu przed modyfikacją stanowiska;
• nowy projekt stanowiska oraz sygnały wyprowadzone na płytkę, okablowanie;
• komunikacja PC — PEdASK za pomocą portu równoległego;
• schemat układu elektroniczego, spełniający powyżej opisane założenia;
• zasada działania, użytkowania i testowanie układu;
• opis układów scalonych i pozostałych elementów;

3.3. Budowa i funkcjonalność układu przed modyfikacją stanowiska 27
• mozaika ścieżek płytki drukowanej oraz technologia wykonania;
• pomiary, ograniczenia prędkości transmisji;
• zalecane środki ostrożności;
• napotkane trudności i problemy oraz nawiązana współpraca z firmą WObit.
3.3 Budowa i funkcjonalność układu przed modyfikacją
stanowiska
Przeprowadzono analizę stanowiska do badania własności silnika krokowego.
Jego ogólny schemat połączeń przed modyfikacją stanowiska został przedstawiony
na rys. 3.1.
1
1
2
2
3
3
4
4
D D
C C
B B
A A
Title
Number RevisionSize
A4
Date: 2007-02-01 Sheet ofFile: W:\work_studia\..\schemat_blokowy)old.schdocDrawn By:
SMC81STEROWNIK
M
+VC
CG
ND
A/AB/B
1
ZN 100LZASILACZ NIESTABILIZOWANY
ZD100ZADAJNIK
A B C D E F G H I
LP 100PRĘDKOŚCIOMIERZ
A B C D E F G H I
MD 100LICZNIK UNIWERSALNY
A B C D E F G H I
Vcc 230V 50Hz
MOK 40PRZETWORNIK OBROTOWO-IMPULSOWY
ZERO220VAC220VAC
GNDGND
+32V+32V
CLK
DIR
SILNIK KROKOWY 2-FAZOWY (HYBRYDOWY)57BYG 081D
1 111
SILNIKA KROKOWEGO
A - CZERWONYA/ - ŻÓŁTYB - BRĄZOWYB/ - ZIELONY
DB9 - F (1)
DB9 - M (2)
(3)
(4/5)
(6)
DB9 - F (1)DB9 - F (1) (2/3)(2/3)
(4)(4)
Anna Cieśnik
Schemat blokowy - początkowa budowa stanowiska
P0DIR P0DIR P0DIR
Rysunek 3.1: Schemat połączeń układu przed modyfikacją stanowiska
3.3.1 Budowa stanowiska
Stanowisko laboratoryjne do badania właściwości silników krokowych, które pod-
legało rozbudowie w ramach niniejszej pracy, składało się z następujących podze-
społów:
• zasilacz niestabilizowany ZN 100L

3.3. Budowa i funkcjonalność układu przed modyfikacją stanowiska 28
• zadajnik programowalny ZD 100
• sterownik silnika krokowego SMC 81RP
• silnik krokowy 2-fazowy BYG 57 81D (1, 8o)
• przetwornik obrotowo-impulsowy MOK 40 1000/1224/BZ/PP
• programowalny licznik rewersyjny MD 100
• licznik prędkości LP 100
Wszystkie powyżej wymienione elementy układu zostały zakupione we firmie WObit
z siedzibą w Poznaniu.
Rysunek 3.2: Fotografia stanowiska przed przystąpieniem do pracy
Początkowo stanowisko do badania własności silnika krokowego składało się
głównie z elementów typowo przeznaczonych do zastosowań przemysłowych, które
zostaną pokrótce opisane poniżej.
3.3.2 Opis poszczególnych urządzeń
ZN 100L
Patrząc na fotografie stanowiska od prawej strony, na listwie montażowej zamo-
cowany został zasilacz niestabilizowany ZN 100L dedykowany dla urządzeń które
wymagają napięcia niestabilizowanego o dużej obciążalności. Zasilacz tego typu
posiada duży kondensator elektrolityczny, umożliwiający odebranie nadmiarowej
energii ze sterownika silnika krokowego podczas hamowania silnika, nie powodując
przy tym dużego wzrostu napięcia na wyjściu. Dodatkową zaletą dużej pojemności
jest redukcja tętnień pochodzących z sieci. Znamionowa wartość napięcia zasilacza
wynosi +30V [26]. Z przeprowadzonych pomiarów wynika, że napięcie to osiąga
nawet do +36V przy małym obciążeniu.

3.3. Budowa i funkcjonalność układu przed modyfikacją stanowiska 29
Rysunek 3.3: Zasilacz niestabilizowany ZN 100L [26]
SMC 81RP
Sterownik SMC 81RP wymaga zasilania niestabilizowanego i jest przeznaczony
do pracy ze silnikiem krokowym dwufazowym. Wzrost napięcia zasilania powyżej
38V powoduje uszkodzenie sterownika. Sterownik SMC 81 daje możliwość sterowa-
nia obrotu silnika z pełnym krokiem lub podzielonym odpowiednio na 2, 4, 8, 32
mikrokroki. Ustawienie to jest możliwe za pomocą zworek na złączu sterującym.
Obrót o ustawiony mikrokrok wykonywany jest z każdym nadchodzącym impulsem
sygnału taktującego CLK.
Rysunek 3.4: Sterownik silnika krokowego SMC 81RP [27]
Urządzenie to posiada dwa złącza. Do pierwszego z nich doprowadzone jest
zasilanie z opisanego powyżej zasilacza oraz możliwe jest wyprowadzenie sygnałów
wyjściowych faz silnika (faza: A, /A, B, /B) które należy odpowiednio dołączyć do
dwóch końcówek uzwojeń cewek silnika krokowego. Prąd znamionowy wynosi 1, 5A,
natomiast częstotliwość czopowania 20kHz.
Drugie złącze — sterujące przyjmuje częściowo sygnały ze zadajnika programo-
walnego ZD 100 oraz stany wymuszone przez zwarcie odpowiednich pinów do masy
[27].
GND — nieparzyste piny 1 do 15;

3.3. Budowa i funkcjonalność układu przed modyfikacją stanowiska 30
CLK — pin 2, sygnał taktujący;
EN — pin 4, wejście sygnału zezwolenia (aktywne zero);
DIR — pin 6, wejście sygnału kierunku „0” — w lewo;
M1 — pin 8, ustawienie stopnia podziału kroku;
M2 — pin 10, ustawienie stopnia podziału kroku;
M3 — pin 12, ustawienie stopnia podziału kroku;
STOP — pin 14, blokada sygnału CLK (trzymanie);
GND — pin 16.
Podczas pomiarów stwierdzono, że masa zasilania i masa na wejściu sterującym
dwóch odrębnych złączy tego sterownika jest wspólna — połączona na płytce dru-
kowanej sterownika.
ZD 100
Programowalny zadajnik współpracujący ze sterownikami silników krokowych
firmy WObit, w zakupionej wersji ma możliwość ułatwienia sterowania dzięki pod-
łączeniu do komputera i sterowaniu za pomocą programu firmowego WINSMC dedy-
kowanego temu urządzeniu. A zatem może on funkcjonować w dwóch trybach pracy.
Zadajnik ZD 100 może być stosowany do bezpośredniej współpracy ze sterownikiem
silnika krokowego lub jako terminal pośredniczący pomiędzy PC a sterownikiem
SMC dzięki programowi WINSMC. Szczegółowe informacje na temat sterowania
w tych dwóch trybach można znaleźć w [28].
Rysunek 3.5: Zadajnik programowalny ZD 100 [28]
Opis najważniejszych złącz zadajnika1 ZD 100:
Złącze 2 DB9F — porty wyjściowe optoizolowane:
1Naniesiono poprawki do rysunku z dokumentacji firmy WObit

3.3. Budowa i funkcjonalność układu przed modyfikacją stanowiska 31
Rysunek 3.6: Opis złącz zadajnika ZD 100 [28]
1 — /DIR masa dla sygnału DIR;
2 — CLK sygnał taktujący;
3 — Kolektor OUT3;
4 — Kolektor OUT5;
5 — Kolektor OUT6;
6 — DIR sygnał kierunku obrotu silnika;
7 — /CLK masa dla sygnału CLK;
8 — Kolektor OUT4;
9 — Emiter OUT3–OUT6.
Złącze to będzie wykorzystywane w projekcie do przesyłania sygnałów sterujących
na sterownik SMC 81RP w połączeniu bezpośrednim oraz z wyprowadzeniem na
płytkę PEdASK.
Złącze 3 comp — RS232 lub 485:
1 — GND;
2 — TxD;
3 — RxD;
4 — GND.
Złącze to posłuży do komunikacji z komputerem w przypadku używania firmowego
programu WINSMC do sterowania silnikiem.

3.3. Budowa i funkcjonalność układu przed modyfikacją stanowiska 32
Silnik BYG57 081D
Silnik 2-fazowy z krokiem 1, 8o±5% należy do małych silników, o standardowychmomentach obrotowych. Wartość napięcia wejściowego wynosi 5V , a prądu 1A.
Jego parametry techniczne zostały opisane powyżej w rozdziale 2.6 opisującym
zastosowany silnik krokowy. Oznaczenia wyprowadzonych przewodów opisane w do-
Rysunek 3.7: Silnik krokowy BYG57 081D [31]
kumentacji nie są adekwatne do stanu fizycznego, dlatego zostaną podane poniżej:
A — czerwony;
A/ — żółty;
A* — niebieski;
A*/ — czarny;
B — brązowy;
B/ — zielony;
B* — biały;
B*/ — fioletowy;
MOK40
Optoelektroniczny przetwornik obrotowo-impulsowy MOK 40 jest typowym urzą-
dzeniem przemysłowym. Jest to przetwornik inkrementalny solidnie wykonany
w obudowie metalowej wszechstronnego zastosowania, m.in. są przeznaczone do po-
miaru przemieszczeń kątowych, czyli możliwy jest pomiar zarówno kąta jak i pręd-
kości kątowych [30]. Z wykorzystaniem napędu paskowego lub zębatki możliwy jest
pomiar przemieszczenia liniowego.
Przetworniki tego typu umożliwiają określenie pozycji względnej. Jest to zre-
alizowane przez zliczanie odpowiednich impulsów. Dzięki przesunięciu fazowemu

3.3. Budowa i funkcjonalność układu przed modyfikacją stanowiska 33
Rysunek 3.8: Przetwornik obrotowo-impulsowy MOK40 [29]
kanałów A i B (rys. 3.9) możliwe jest rozpoznanie kierunku obrotu. Układ pobiera-
jący (z kwadraturą) te dane może na podstawie zliczania impulsów (dodawania lub
odejmowania) określić przemieszczenie enkodera.
Dodatkowy sygnał — kanał zerowy C wyznacza pozycję absolutną przy każdym
pełnym obrocie. Może on posłużyć do rozpoznawania poprawności przychodzących
impulsów.
Rozdzielczość działek na obrót tego enkodera wynosi 1000. Jest zdefiniowana
przez liczbę kresek na tarczy podziałowej enkodera. Liczba tych działek odpo-
wiada liczbie okresów z jednego kanału. Liczba impulsów zliczana w poprawnie
zaprojektowanym liczniku kwadraturowym jest 4-krotnie większa od liczby działek.
Przykładem takiego licznika z pracą kwadraturową jest MD 100 [32].
Napięcie zasilania wg danych katalogowych 1224, czyli 12..24VDC. Przy czym
znaleziona nieścisłość w dokumentacji wskazuje na możliwy zakres zasilania 5..24VDC.
Wykonano udane próby pracy enkodera przy napięciu zasilania 5VDC, jednak stała
praca na tym poziomie okazała się niestabilna, dlatego w projektowanym ukła-
dzie zapewniono dodatkowo zasilanie dla enkodera z płytki PEdASK na poziomie
11VDC, co okazało się wystarczającym rozwiązaniem. Wyjścia zastosowanego prze-
twornika mają układ PP ang. Push-Pull, którego schemat jest na rys. 3.9
Rysunek 3.9: Wyjście typu ang. Push-Pull oraz przebiegi sygnałów na wyjściachMOK40 [29]
Opis przewodów:
Vcc — brązowy (zasilanie +12...24V);

3.3. Budowa i funkcjonalność układu przed modyfikacją stanowiska 34
GND — niebieski;
A — czarny (faza A);
B — biały (faza B);
C — pomarańczowy (sygnał zerowy).
LP100 i MD100
Uniwersalny licznik prędkości LP 100 jest przeznaczony do współpracy z opto-
elektronicznymi przetwornikami obrotowymi lub liniowymi. Licznik ten zlicza im-
pulsy wytwarzane przez enkoder w jednostce czasu. Przetworzone dane wyświetla
na sześciopozycyjnym wyświetlaczu.
Rysunek 3.10: Uniwersalny licznik prędkości LP 100 [33]
Licznik prędkości LP 100 ma wszechstronne zastosowanie [28] zarówno w prze-
myśle jak i laboratoriach badawczych. Jego wykorzystanie jest możliwe wszędzie
tam, gdzie istnieje konieczność pomiaru prędkości, przesuwu, obrotowej, zdarzeń
czy innych wielkości.
Zaletą tego licznika jest prostota dopasowywania jego parametrów do rozmaitych
sytuacji na obiekcie, który ma on kontrolować. Niestety jednak skomplikowana ma-
nipulacja przy zmianie parametrów pomiaru tego urządzenia jest wadą tego licznika.
Wymiana licznika prędkości na nowszy model umożliwia zastosowanie firmowego
oprogramowania, niestety wiąże się to z dodatkowymi kosztami.
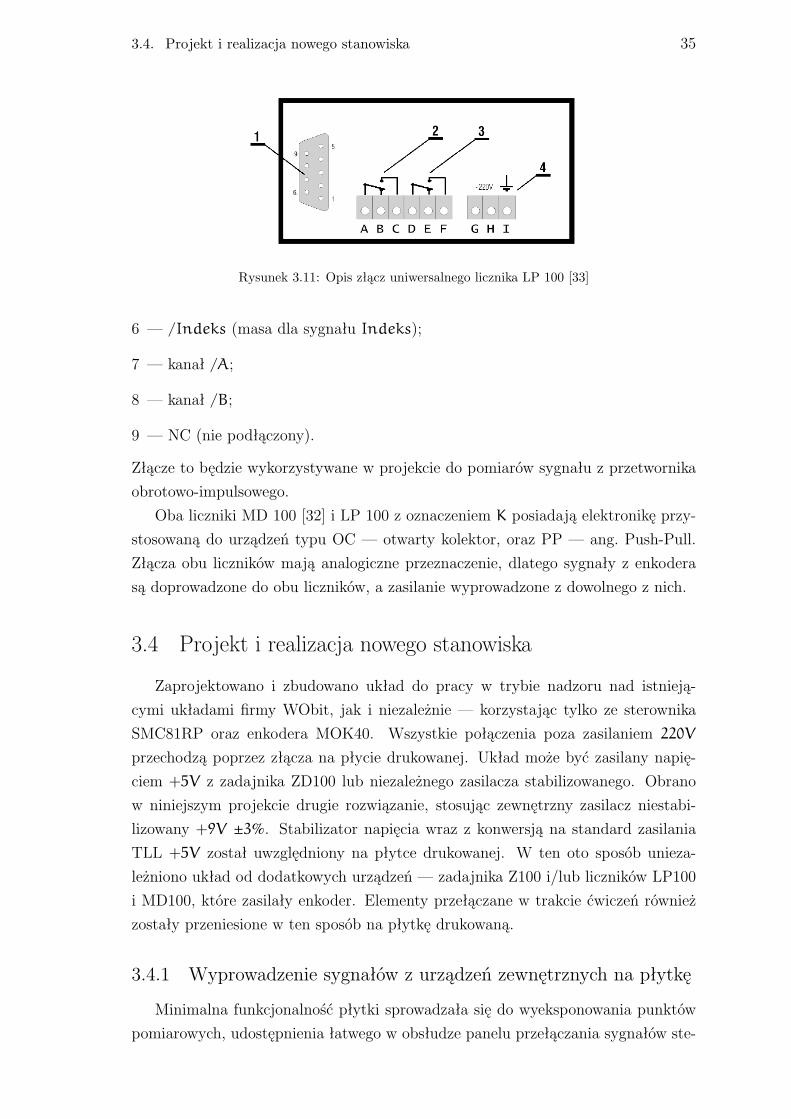
Złącze 1 DB9F — złącze sygnału wejściowego i zasilania czujnika:
1 — Vcc;
2 — Indeks (kanał zerujący C);
3 — kanał A;
4 — kanał B;
5 — GND;
3.4. Projekt i realizacja nowego stanowiska 35
Rysunek 3.11: Opis złącz uniwersalnego licznika LP 100 [33]
6 — /Indeks (masa dla sygnału Indeks);
7 — kanał /A;
8 — kanał /B;
9 — NC (nie podłączony).
Złącze to będzie wykorzystywane w projekcie do pomiarów sygnału z przetwornika
obrotowo-impulsowego.
Oba liczniki MD 100 [32] i LP 100 z oznaczeniem K posiadają elektronikę przy-
stosowaną do urządzeń typu OC — otwarty kolektor, oraz PP — ang. Push-Pull.
Złącza obu liczników mają analogiczne przeznaczenie, dlatego sygnały z enkodera
są doprowadzone do obu liczników, a zasilanie wyprowadzone z dowolnego z nich.
3.4 Projekt i realizacja nowego stanowiska
Zaprojektowano i zbudowano układ do pracy w trybie nadzoru nad istnieją-
cymi układami firmy WObit, jak i niezależnie — korzystając tylko ze sterownika
SMC81RP oraz enkodera MOK40. Wszystkie połączenia poza zasilaniem 220V
przechodzą poprzez złącza na płycie drukowanej. Układ może być zasilany napię-
ciem +5V z zadajnika ZD100 lub niezależnego zasilacza stabilizowanego. Obrano
w niniejszym projekcie drugie rozwiązanie, stosując zewnętrzny zasilacz niestabi-
lizowany +9V ±3%. Stabilizator napięcia wraz z konwersją na standard zasilaniaTLL +5V został uwzględniony na płytce drukowanej. W ten oto sposób unieza-
leżniono układ od dodatkowych urządzeń — zadajnika Z100 i/lub liczników LP100
i MD100, które zasilały enkoder. Elementy przełączane w trakcie ćwiczeń również
zostały przeniesione w ten sposób na płytkę drukowaną.
3.4.1 Wyprowadzenie sygnałów z urządzeń zewnętrznych na płytkę
Minimalna funkcjonalność płytki sprowadzała się do wyeksponowania punktów
pomiarowych, udostępnienia łatwego w obsłudze panelu przełączania sygnałów ste-

3.4. Projekt i realizacja nowego stanowiska 36
rujących oraz ich prezentowania za pomocą diod świecących.
Projektowana płytka drukowana miała spełniać wiele funkcji na różnych stop-
niach powstawania projektu, dlatego postanowiono wyprowadzić wszystkie możliwe
sygnały, których dokładny opis został przedstawiony w tabelach 3.1..3.9. Dane te
posłużyły w projektowaniu układu PEdASK.
W ostatecznej wersji, gniazda G2, G3, G6 nie są wykorzystywane. Były one jed-
nak niezbędne podczas prób i testowania układu. Mogą również posłużyć w dalszej
rozbudowie stanowiska.
Tablica 3.1: Opis połączeń liczników z gniazdem G2 PEdASK
L.p. Złącze licznika DB9F DB9M Złącze płytki PEdASKLP100, MD100 LP/MD100(1) G2 LP/MD100 OUT: A B
1 Vcc 1 1 NC2 Index (C) 2 2 NC3 Kanał – A 3 3 Sygnał do liczników4 Kanał – B 4 4 Sygnał do liczników5 GND 5 5 GND6 /Index (/C) 6 6 NC7 Kanał - /A 7 7 NC8 Kanał - /B 8 8 NC9 NC 9 9 NC
Tablica 3.2: Opis połączeń liczników z gniazdem G3 PEdASK
L.p. Złącze licznika DB9F DB9M Złącze płytki PEdASKLP100, MD100 LP/MD100(1) G3 LP/MD100 OUT: A B C
1 Vcc 1 1 NC2 Index (C) 2 2 Sygnał do liczników3 Kanał – A 3 3 Sygnał do liczników4 Kanał – B 4 4 Sygnał do liczników5 GND 5 5 GND6 /Index (/C) 6 6 NC7 Kanał - /A 7 7 NC8 Kanał - /B 8 8 NC9 NC 9 9 NC
Tablica 3.3: Opis połączeń przetwornika obrotowo-impulsowego MOK40 z gniaz-dem G4 PEdASK
L.p. Złącze enkodera DB9F DB9M Złącze płytki PEdASKMOK40 W4U G4 MOK40 IN: A B C, OUT: Vcc GND
1 Vcc — brązowy 1 1 Vcc +12V zasilanie z płytki2 C — pomarańczowy 2 2 Sygnał do komputera i liczników3 A — czarny 3 3 Sygnał do komputera i liczników4 B — biały 4 4 Sygnał do komputera i liczników5 GND — niebieski 5 5 GND6 NC 6 6 NC7 NC 7 7 NC8 NC 8 8 NC9 NC 9 9 NC
3.4.2 Komunikacja PC — PEdASK
W niniejszym rozdziale przedstawiono komunikację między płytką edukacyjną
do analizy silnika krokowego a komputerem przy połączeniu portem równoległym

3.4. Projekt i realizacja nowego stanowiska 37
Tablica 3.4: Opis połączeń zadajnika ZD100 (2) z gniazdem G5 PEdASK
L.p. Złącze zadajnika DB9F DB9M Złącze płytki PEdASKZD100 ZD100 (2) G5 ZD100(2) IN: CLK DIR GND
1 DIR/ (GND) 1 1 GND2 CLK 2 2 Sygnał do komputera i sterownika SMC3 Kolektor OUT3 3 3 NC4 Kolektor OUT5 4 4 NC5 Kolektor OUT6 5 5 NC6 DIR 6 6 Sygnał do komputera i sterownika SMC7 CLK/ (GND) 7 7 GND8 Kolektor OUT4 8 8 NC9 Emiter OUT(3-6) (GND) 9 9 GND
Tablica 3.5: Opis połączeń zewnętrznego zasilacza niestabilizowanego z gniaz-dem G7 PEdASK
L.p. Zasilacz niestab. PWR 2.1M PWR 2.1F Złącze zasilania płytkiZN 4WZN 9/300 W7U G7 ZN9/300
1 +9V (+12V) 1 1 Zasilanie + 9V2 GND 2 2 Zasilanie – GND
Tablica 3.6: Opis połączeń uzwojeń silnika krokowego BYG57 081D z gniazdemG8 PEdASK
L.p. Wtykowa listwa łączeniowa Listwa 8F Listwa 8M Wtykowa listwa łączeniowaSilnik Krokowy 57BYG081 W8PB G8 Złącze płytki – Silnik BYG081
1 A – czerwony 1 1 A2 A/ - żółty 2 2 A/3 A* - niebieski 3 3 A*4 A*/ - czarny 4 4 A*/5 B – brązowy 5 5 B6 B/ - zielony 6 6 B/7 B* - biały 7 7 B*8 B*/ - fioletowy 8 8 B*/
LPT od strony sprzętowej. Natomiast w części dotyczącej oprogramowania inży-
nierskiego, zagadnienie to zostanie rozwinięte w innym kontekście.
Wspólnym punktem dla komputera i układu PEdASK jest złącze LPT, wypro-
wadzone na gniazdo G1 płytki. Wykorzystania poszczególnych pinów, z uwzględ-
nieniem ograniczeń do kierunku przesyłania danych przedstawiono na rys. 3.12(a).
Natomiast na rys. 3.12(b) umieszczono fragment schematu układu PEdASK z opi-
sem gniazda G1. Zebrano najistotniejsze informacje w tabeli 3.10. Zawiera ona opis
numeracji pinów, przydzielone sygnały w realizowanym projekcie, sygnały standar-
dowego interfejsu portu równoległego (ang. Interfacing the Standard Parallel Port)
na podstawie [10] oraz kierunek przepływu informacji i nazwę rejestru. Niektóre
z pinów standardowego portu LPT mają logikę odwrotną, dotyczy to trzech pinów
rejestru kontrolnego (1, 14, 17) i jednego pinu rejestru statusowego (11). Konse-
kwencją tego jest odczyt potencjału +5V jako stan logiczny „0”, a zwarcie pinu do
masy jako stan logiczny „1”.
Aby zapewnić prawidłową pracę dwukierunkowego rejestru kontrolnego, przy
odczycie danych, należało rozwiązać następujący problem. Bezpośrednie połącze-
nie tych pinów z wyjściem innego układu (np.: ADC0804) spowodowałby konflikt

3.4. Projekt i realizacja nowego stanowiska 38
Tablica 3.7: Opis połączeń sterownika SMC81RP z gniazdem G9 PEdASK
L.p. Złącze wyjściowe i zasilania Listwa 6F Listwa 6M Wtykowa listwa łączeniowaSMC81 sterownik silnika W9U G9 Złącze płytki wyjście i zasilanie
1 Faza A 1 1 Wejście wazy A2 Faza /A 2 2 Wejście fazy /A3 Faza B 3 3 Wejście fazy B4 Faza /B 4 4 Wejście fazy /B5 Zasilanie – GND 5 5 Zasilanie – GND6 Zasilanie – Vcc 6 6 Zasilanie – Vcc
Tablica 3.8: Opis połączeń zasilacza niestabilizowanego ZN100L z gniazdemG10 PEdASK
L.p. Zasilacz niestab. PWR 2.5M PWR 2.5F Złącze płytki– zasilanie 32VZN100L W10PC G10 ZN100L IN
1 +32V 1 1 Zasilanie +32V2 GND 2 2 Zasilanie – GND
Tablica 3.9: Opis połączeń zasilania i wyjściowych sterownika SMC81RPz gniazdem G11 PEdASK
L.p. Złącze sterujące MIL M MIL M Złącze płytki PEdASKSMC81RP Wtyk 8x2M G11 SMC81 OUT
1 GND 1 1 GND2 CLK 2 2 CLK – Sygnał z zadajnika lub komputera3 GND 3 3 GND4 EN 4 4 EN – Ustawianie zezwolenia pracy przełącznikiem5 GND 5 5 GND6 DIR 6 6 DIR – Sygnał z zadajnika lub komputera7 GND 7 7 GND8 M1 8 8 M1 - Ustawienie mikrokroku przełącznikiem9 GND 9 9 GND10 M2 10 10 M2 - Ustawienie mikrokroku przełącznikiem11 GND 11 11 GND12 M3 12 12 M3 - Ustawienie mikrokroku przełącznikiem13 GND 13 13 GND14 STOP 14 14 STOP – Ustawianie blokady CLK przełącznikiem15 GND 15 15 GND16 GND 16 16 GND
w przypadku, gdy wejście portu miałoby stan wysoki wymuszony przez układ lo-
giczny, a port próbowałby ściągnąć go w dół. Dlatego zastosowano układ z otwar-
tym kolektorem, którego działanie zostało opisane z rozdziale dotyczącym budowy
układu PEdASK. Wykonano analizę sygnałów logicznych podczas pracy układu
w aplikacji monitorującej (stworzonej na potrzeby projektu inżynierskiego) wszyst-
kie ważniejsze piny portu LPT. Wyniki przedstawiono w rozdziale 3.11.

3.4. Projekt i realizacja nowego stanowiska 39
IRQ CLR ⇒
A/B ⇒
STOP ⇒ SMC81
M3 ⇒ SMC81
M2 ⇒ SMC81
M1 ⇒ SMC81
DIR ⇒ SMC81
EN ⇒ SMC81
CLK ⇒ SMC81
IRQ ⇐
CLK ⇐ ZD100 / C ⇐ MOK40
A ⇐MOK40
B ⇐MOK40
BOARD ⇐
DIR ⇐ ZD100 / IRQ TEST ⇐
OVF CLR ⇒
OVF ⇐
1
14
13
25
(a) Wykorzystanie pinów w porcieLPT
(b) Fragment schematu układuPEdASK z gniazdem G1
Tablica 3.10: Opis pinów portu równoległego w zastosowanej komunikacji PC–PEdASK
Numer pinu Przydzielone Sygnały SPP Kierunek Rejestr Negacja(D 25) sygnały w proj. In/out sprzętowa
1 IRQ CLR ⇒ nStrobe In/Out Kontrolny tak2 A/B ⇒ Data 0 Out Danych3 STOP ⇒SMC81 Data 1 Out Danych4 M3 ⇒SMC81 Data 2 Out Danych5 M2 ⇒SMC81 Data 3 Out Danych6 M1 ⇒SMC81 Data 4 Out Danych7 DIR ⇒SMC81 Data 5 Out Danych8 EN ⇒SMC81 Data 6 Out Danych9 CLK ⇒SMC81 Data 7 Out Danych10 IRQ ⇐ nAck In Statusowy11 CLK ⇐ZD100 / C ⇐MOK40 Busy In Statusowy tak12 B ⇐MOK40 Paper-Out In Statusowy
PaperEnd13 A ⇐MOK40 Select In Statusowy14 BOARD nAuto-Linefeed In/Out Kontrolny tak15 DIR ⇐ZD100 / TEST IRQ nError / nFault In Statusowy16 OVR CLR ⇒ nInitialize In/Out Kontrolny17 OVR ⇐ nSelect-Printer In/Out Kontrolny tak
nSelect-In18 - 25 GND Ground Gnd

3.5. Płytka edukacyjna do analizy silnika krokowego — PEdASK 40
3.5 Płytka edukacyjna do analizy silnika krokowego —
PEdASK
3.5.1 Wskazówki do projektowania układów z elementami
cyfrowymi
Rodziny układów TTL i ich nazwy
Wszystkie układy pochodzące z różnych rodzin o tym samym numerze (np. 7400,
74L00, 74H00) mają taki sam układ wyprowadzeń ([11]). Z praktycznego punktu
widzenia – użytkownika, ich parametry różnią się tylko ze względu na pobór prądu,
wielkością prądu wejściowego i wyjściowego.
Pierwsza cyfra oznacza przedział temperatur pracy układu, 7 – jest przezna-
czony do zastosowań przemysłowych. Druga cyfra w układach logicznych TTL, to
zawsze 4.
Dwie, czasem trzy ewentualnie cztery ostatnie cyfry oznaczają typ i funkcję
układu cyfrowego. W ich numeracji nie ma jakiegoś porządku, kolejne numery były
przyznawane nowo powstałym układom, dlatego dobra pamięć elektronika lub ka-
talog może odszyfrować przeznaczenie układu scalonego. Natomiast została utrzy-
mana zasada, że elementy o jednakowych ostatnich cyfrach mają taki sam układ
wyprowadzeń.
Litery na początku nazwy wykazują tylko producenta i są często pomijane. Z ko-
lei środkowe litery oznaczają technologię i budowę wewnętrzną układu.
Często można spotkać oznaczenie literowe na końcu wskazujące typ obudowy,
np. „N” oznacza popularną obudowę typu DIL. Pozostałe to „J” dla obudowy
ceramicznej i litera „D” — miniaturowa obudowa do montażu powierzchniowego.
Wydajność prądowa bramek TTL
Klasyczne wyjście bramek TTL w stanie wysokim praktycznie nie pobiera prądu,
natomiast w stanie niskim pobór prądu jest znaczny, dlatego wyjścia kilku innych
bramek muszą dostarczyć wystarczającą ilość prądu, aby układ pracował prawi-
dłowo. Do typowej bramki 7400 serii TTL na jej wyjście można podłączyć tylko
ograniczoną liczbę wejść następnych bramek. Powszechnie przyjęto zasadę, że z jed-
nego wejścia typowej bramki TTL wpływa minimalny prąd 1, 6mA, natomiast wyj-
ście takiej bramki powinno wysterować dziesięcioma takimi wejściami. A zatem
minimalna wydajność prądowa wyjść typowych bramek serii TTL w stanie niskim
wynosi 16mA [11].

3.5. Płytka edukacyjna do analizy silnika krokowego — PEdASK 41
Wpływ pasożytniczych pojemności na szybkość pracy bramki serii TTL
W praktyce należy uwzględnić szkodliwe pojemności montażowe, zarówno po-
jemności wejściowe jak i pojemności między masą a ścieżkami układu. Typowy czas
narastania, czy opadania zbocza oraz opóźnienia bramki serii TTL wynosi ok. 10ns.
Ogranicza to szybkość pracy z pasożytniczymi pojemnościami do rzędu kilkudzie-
sięciu megaherców.
Wady i zalety technologii CMOS
Najważniejszą cechą tej technologii od strony praktycznej jest fakt, że w stanie
spoczynku praktycznie nie pobierają prądu ze źródła zasilania oraz to, że ich wejścia
również nie wymagają przepływu prądu. Wypadkowy pobór prądu zależy zatem od
częstotliwości przełączania oraz szkodliwych pojemności obciążenia.
Ich zaletą jest zatem fakt, że w stanie spoczynku nie pobierają prądu. Pobór
prądu rośnie liniowo ze wzrostem częstotliwości przełączania. Drugim istotnym
atutem jest napięciowe sterowanie wejściami, nie wymagające przepływu prądu.
Wadą starszych układów tego typu była wrażliwość na ładunki statyczne. Pro-
ducenci zadbali o odporność dzisiejszych układów, jednak zaleca się przy montażu
układów CMOS na płytce drukowanej na początek wlutować wszystkie kondensa-
tory odsprzęgające zasilanie. Kolejnym zaleceniem jest przy ręcznym lutowaniu
płytki, wlutować w pierwszej kolejności nóżki zasilania.
Niewykorzystane wejścia układów CMOS
Nie wolno pozostawiać niepodłączonych wejść układów logicznych CMOS [11],
ponieważ nie sposób przewidzieć stanu na nim. Dodatkowo istnieje możliwość ciągłej
zmiany potencjału na niepodłączonym wejściu, najczęściej o częstotliwości z sieci
50Hz, co znacznie zwiększa pobór prądu. Zawsze należy podłączyć „wiszące” wejścia
albo do masy układu albo do zasilania, bezpośrednio lub przez rezystor 0..100kΩ.
W przypadku układów bipolarnych typu TTL, takie zachowanie jest dopuszczalne,
jednak nie zaleca się ze względu na obniżoną odporność na zakłócenia.
Zatrzaskiwanie
Zjawisko to było często spotykane w układach CMOS i jest nadal w przypadku
podania na wejście układu wyższego potencjału niż wynosi napięcie zasilania.
Zamienniki
Jako zamienniki popularnych układów TTL, czyli z takimi samymi wyprowa-
dzeniami, pojawiły się już dawno układy rodziny 74HCT (ang. High-speed CMOS

3.5. Płytka edukacyjna do analizy silnika krokowego — PEdASK 42
(TTL)). Rodzina 74HC może pracować przy częstotliwości rzędu 100MHz, a za-
kres zasilania wynosi 2..6V , przy czym próg przełączania jest w połowie napięcia
zasilania.
Symbol „L” jest przeznaczony dla układów o wartości napięcia zasilania poniżej
5V , a oznaczenie „S” jest spotykane w układach z tranzystorami bipolarnymi ze
złączem Schottky’ego.
Próg przełączania w układach m.in. serii 74LS jest na poziomie 1, 5V , a dozwo-
lone wejściowe stany logiczne L = 0..0, 8V , natomiast H = 2, 0..5, 5V .
Seria HCT stanowi wierny zamiennik serii TTL ze względu na poziomy zasilania
i przełączania. Natomiast seria HC, również wykonana w technologii CMOS cha-
rakteryzuje się poziomem przełączania w połowie wartości napięcia zasilania, który
mieści się w zakresie 2..6V . Obie powyższe rodziny mogą pracować przy częstotli-
wościach do 40..60MHz. Duża wydajność prądowa tych układów pomaga szybko
przełączać pojemności pasożytnicze.
Zaprojektowany układ elektroniczny można podzielić na zasadnicze części opi-
sane w kolejnych podrozdziałach...
3.5.2 Układ optoizolacji wejścia
Układy PC814 zawierają po jednym optoizolatorze którego skróconą notę kata-
logową zamieszczono w dodatku A.3. Zapewnia izolację napięciową pomiędzy wej-
ściem a jego wyjściem. Transoptory charakteryzują się parametrem CTR (ang. Cur-
rent transfer ratio), który dla tego układu wynosi minimum 20% przy wejściowymprądzie ±1mA, wartość napięcia wyjściowego wynosi VCE = 5V . Układ ten wraz
z towarzyszącymi rezystancjami zapewnia skuteczną separację galwaniczną prze-
twornika obrotowo-impulsowego, dostarczającego wygnały z zakresu 0..12V i płytki
PEdASK pracującej w standardzie TTL, czyli do 5V .
3.5.3 Układ multipleksowania sygnałów sterujących
Układ przełączający sygnały sterujące z komputera i zadajnika wraz z kluczami
(S3-S7) jest oparty na następujących elementach U8 oraz U9. Odpowiadają one za
wybór kompletu sygnałów sterujących. Wybór jest ustawiany sygnałem A/B stero-
wanym z komputera — 2 pin portu LPT. Linia ta jest podpięta do napięcia zasilania
rezystorem podciągającym i przechodzi również do układu U7. Stanowi on wyjście
z tej części, dostarczając sygnałów generujących przerwanie sprzętowe w dalszej
części płytki drukowanej. U7 dostarcza sygnały z enkodera MOK40 lub z przyci-
sków testujących układ wyzwalania przerwania. Stan poszczególnych sygnałów jest
przekierowany na U10, który odpowiada za sterowanie diodami DS8 − DS15.

3.5. Płytka edukacyjna do analizy silnika krokowego — PEdASK 43
11
22
33
44
55
66
77
88
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A3
Dat
e:20
07-0
1-10
Shee
t o
fFi
le:
W:\w
ork_
stud
ia\..
\PED
ASK
.SC
HD
OC
Dra
wn
By:
120 221 322 423 524 625 78910111213 141516171819
2726
G1
LPT
- PC
12345 6789
1110
G6
ZD 1
00 (1
)
12345 6789
1110
G5
ZD 1
00 (2
)
1
2
3
4
5
6
7
8
9
11
10
G2
LP 1
00/M
D 1
00
1615
1413
1211
109
87
65
43
21
G11
OU
T: S
MC
81
1
2
3
4
5
6
7
8
9
11
10
G3
LP 1
00/M
D 1
00
1
2
3
4
5
6
7
8
9
11
10
G4
MO
K 4
0
A <
MO
K40
B <
MO
K40
CLK
DIR
CLK
DIR
A/B
1
1A2
1B3
1Y4
2A5
2B6
2Y7
GN
D8
3Y9
3B10
3A11
4Y12
4B13
4A14
OE
15V
CC
16U
9
SN74
HC
T157
N
A/B
1
1A2
1B3
1Y4
2A5
2B6
2Y7
GN
D8
3Y9
3B10
3A11
4Y12
4B13
4A14
OE
15V
CC
16U
8
SN74
HC
T157
N
EN STO
P
A/B
>
CLK
> S
MC
81
DIR
> S
MC
81
EN >
SM
C81
STO
P >
SMC
81
M1
> SM
C81
M2
> SM
C81
M3
> SM
C81
CLK
< Z
D10
0 / C
< M
OK
40
DIR
< Z
D10
0 / T
EST
IRQ
<
IRQ
<
IRQ
CLR
>
Q3
1
P<Q
in2
P=Q
in3
P>Q
in4
P>Q
out
5P=
Qou
t6
P<Q
out
7
GN
D8
Q0
9
P010
Q1
11
P112
P213
Q2
14
P315
VC
C16
U6
SN74
85N
12U
1ASN
74H
C05
N
34
U1B
SN74
HC
05N
5 6
U1C
SN74
HC
05N
9 8
U1D
SN74
HC
05N
13 12
U1F
SN74
HC
05N
1D2
1Q16
1Q1
2D3
2Q15
2Q14
1C,2
C13
VC
C5
GN
D12
3D6
3Q10
3Q11
4D7
4Q9
4Q8
3C,4
C4
U4
SN74
LS75
N
Ukł
ad w
yzw
alan
ia IR
Q
4700
uF/1
6VC
1
220u
F /1
0V
C3
4K7
R12
4K7
R11
M1
>M
2 >
M3
>
DS3 C
DS2 A
PC
DS5
4K7R10
4K7
R7
4K7
R8
470R
R13
DS1
0M
2D
S8ST
OP
DS1
2D
IR
11 10
U1E
SN74
HC
05N
DS7
LED
6
B <
MO
K40
DIR
/ TES
T IR
Q <
A <
MO
K40
CLK
< Z
D10
0/PC
123
U2A
SN74
HC
00N
56
4
U2B
SN74
HC
00N
89
10
U2C
SN74
HC
00N
1112 13
U2D
SN74
HC
00N
4
CLK
3
D2
1
Q5
Q6
CLRPR
U5A
SN74
HC
74N
10
CLK
11
D12
13
Q9
Q8
CLRPR
U5B
SN74
HC
74N
Cx
C6
1 23
U3A
SN74
HC
00N
56
4U
3B
SN74
HC
00N
8910
U3C
SN74
HC
00N
111213
U3D
SN74
HC
00N
470R
R14
Cx
C7
OV
R <
OV
R C
LR >
S1 SW-P
B2
DS1
4C
LK
DS1
1M
1D
S13
END
S9M
3
Zasi
l.SM
C81
GN
DZa
sil.S
MC
81 3
2V +
Faza
- A
Faza
- A
/Fa
za -
BFa
za -
B/
1 2 3 4 5 6 7 8G8
OU
T: 5
7 B
YG
081
123456G9
IN: S
MC
81
A
- C
zerw
ony
A/
- Żółty
A*
- N
iebi
eski
A*/
- C
zarn
yB
-
Brą
zow
yB
/ -
Ziel
ony
B*
- B
iały
B*/
- Fi
olet
owy
RU
N +
GN
D
DS4 B
4K7
R9
A/B
1
1A2
1B3
1Y4
2A5
2B6
2Y7
GN
D8
3Y9
3B10
3A11
4Y12
4B13
4A14
OE
15V
CC
16U
7
SN74
HC
T157
N
B <
MO
K40
C <
MO
K40
A <
MO
K40
CLK
< Z
D10
0
DIR
< Z
D10
0TE
ST IR
Q <
S2 SW-P
B1
4K7
R16
TEST
IRQ
DS6
LED
5
R20
= 0
,1 O
hm /2
W
R20
0.1u
F
C8
0.1u
FC
9
0.1u
FC
10
0.1u
FC
5
1 23
G7
PWR
2.1
RU
N --
0,1
Ohm
/2W
R18
0,1
Ohm
/2W
R19
R18
=R
19 =
Ręcz
ne k
asow
anie
prz
epeł
nien
ia IR
Q
IN3
2
OU
T1
GN
D
U11
µA78
05
240R
R5
DS1
+5V
470R
R6
0.1u
F
C4
Cap
220u
F/16
V
C2
23 1
S8 SW-S
PDT 2
3 1
S9 SW-S
PDT
S4M
1
S3EN
S7ST
OP
S6M
3
S5M
2
1 23
G10
PWR
2.5
K1
Rel
ay-D
PDT K
2
Rel
ay-D
PDT
K3
Rel
ay-D
PDT
IN11
IN22
IN33
IN44
IN55
IN66
IN77
IN88
GND9 Com 10OUT8 11OUT7 12OUT6 13OUT5 14OUT4 15OUT3 16OUT2 17OUT1 18
U10
ULN
2803
A
D2
Dio
de 1
N41
48
D1
Dio
de 1
N41
48
DS1
5/C
LK
RÓ
WN
OLE
GLE
UZW
.
JED
NO
UZW
.
SZER
EGO
WO
UZW
.
123456789
R3
8x 4
K7
123456789
R2
8x 4
K7
123456789
R1
8x 4
K7
RÓ
WN
OLE
GLE
UZW
.
123456789
R4
8x 4
K7
STO
P
M3
M2
LED
M1
EN CLK
DIR
0.1u
F
C12
0.1u
FC
11
0.1u
FC
13
U13
PC81
4
U14
PC81
4
U12
PC81
4
2K0
R24
2K0
R25
2K0
R26
2K0
R21
2K0
R22
2K0
R23
IN: Z
N 1
2V
MO
K40
>A
DIR
MO
K40
> B
CLK
CLK
/
DIR
/
CLK
/
DIR
/
IN: Z
N 1
00
OU
T: Z
N 1
00
DB
9 M
DB
9 M
DB
9 M
DB
9 M
DB
9 M
OU
T: A
B G
ND
OU
T: A
B C
GN
DIN
: A B
C, O
UT:
Vcc
GN
D
MO
K40
> A
MO
K40
> B
MO
K40
> C
12 V
+/-3
%
DH
P8 -
25 M
4K7R17
Sche
mat
pły
tki e
duka
cyjn
ej d
o an
aliz
y si
lnik
a kr
okow
ego
Ann
a C
ieśn
ik
12
G 1
3
OU
T
12
G 1
2
OU
T
P0C101 P0C102
P0C201 P0C202
P0C301 P0C302
P0C401 P0C402
P0C501 P0C502
P0C601 P0C602 P0C701 P0C702
P0C801
P0C802
P0C901
P0C902
P0C1001 P0C1002
P0C1101 P0C1102
P0C1201 P0C1202
P0C1301 P0C1302
P0D101 P0D102 P0D201 P0D202
P0DS101 P0DS102
P0DS201 P0DS202
P0DS301 P0DS302
P0DS401 P0DS402
P0DS601
P0DS602
P0DS701
P0DS702
P0DS801 P0DS802
P0DS901 P0DS902
P0DS1001 P0DS1002
P0DS1101 P0DS1102
P0DS1201 P0DS1202
P0DS1301 P0DS1302
P0DS1401 P0DS1402
P0DS1501 P0DS1502
P0G101
P0G102
P0G103
P0G104
P0G105
P0G106
P0G107
P0G108
P0G109
P0G1010
P0G1011
P0G1012
P0G1013
P0G1014
P0G1015
P0G1016
P0G1017
P0G1018
P0G1019
P0G1020
P0G1021
P0G1022
P0G1023
P0G1024
P0G1025
P0G1026
P0G1027
P0G201
P0G202
P0G203
P0G204
P0G205
P0G206
P0G207
P0G208
P0G209
P0G2010
P0G2011
P0G301
P0G302
P0G303
P0G304
P0G305
P0G306
P0G307
P0G308
P0G309
P0G3010
P0G3011
P0G401
P0G402
P0G403
P0G404
P0G405
P0G406
P0G407
P0G408
P0G409
P0G4010
P0G4011
P0G501
P0G502
P0G503
P0G504
P0G505
P0G506
P0G507
P0G508
P0G509
P0G5010
P0G5011
P0G601
P0G602
P0G603
P0G604
P0G605
P0G606
P0G607
P0G608
P0G609
P0G6010
P0G6011
P0G701
P0G701A
P0G701B
P0G702
P0G702A
P0G702B
P0G703
P0G703A
P0G703B
P0G801
P0G802
P0G803
P0G804
P0G805
P0G806
P0G807
P0G808
P0G901
P0G902
P0G903
P0G904
P0G905
P0G906
P0G1001
P0G1001A
P0G1001B
P0G1002
P0G1002A
P0G1002B
P0G1003
P0G1003A
P0G1003B
P0G1101
P0G1102
P0G1103
P0G1104
P0G1105
P0G1106
P0G1107
P0G1108
P0G1109
P0G11010
P0G11011
P0G11012
P0G11013
P0G11014
P0G11015
P0G11016
P0G 1201
P0G 1202
P0G 1301
P0G 1302
P0K101
P0K102
P0K103
P0K104
P0K105
P0K106
P0K107
P0K108
P0K201
P0K202
P0K203
P0K204
P0K205
P0K206
P0K207
P0K208
P0K301
P0K302
P0K303
P0K304
P0K305
P0K306
P0K307
P0K308
P0PC01 P0PC02
P0R101
P0R102
P0R103
P0R104
P0R105
P0R106
P0R107
P0R108
P0R109
P0R201
P0R202
P0R203
P0R204
P0R205
P0R206
P0R207
P0R208
P0R209
P0R301
P0R302
P0R303
P0R304
P0R305
P0R306
P0R307
P0R308
P0R309
P0R401
P0R402
P0R403
P0R404
P0R405
P0R406
P0R407
P0R408
P0R409
P0R501 P0R502
P0R601 P0R602
P0R701 P0R702
P0R801 P0R802
P0R901 P0R902
P0R1001 P0R1002
P0R1101 P0R1102
P0R1201 P0R1202
P0R1301
P0R1302
P0R1401
P0R1402
P0R1601
P0R1602
P0R1701 P0R1702
P0R1801
P0R1802
P0R1901
P0R1902
P0R2001
P0R2002
P0R2101
P0R2102
P0R2201
P0R2202
P0R2301
P0R2302
P0R2401
P0R2402
P0R2501
P0R2502
P0R2601
P0R2602
P0S101
P0S102
P0S201
P0S202
P0S301
P0S302
P0S401
P0S402
P0S501
P0S502
P0S601
P0S602
P0S701
P0S702
P0S801
P0S802
P0S803
P0S901
P0S902
P0S903
P0U1A01
P0U1A02
P0U1B03
P0U1B04
P0U1C05 P0U1C06
P0U1D08 P0U1D09
P0U1E010 P0U1E011
P0U1F012 P0U1F013
P0U2A01
P0U2A02
P0U2A03
P0U2B04
P0U2B05
P0U2B06
P0U2C08
P0U2C09
P0U2C010
P0U2D011
P0U2D012
P0U2D013
P0U3A01
P0U3A02
P0U3A03
P0U3B04
P0U3B05
P0U3B06
P0U3C08
P0U3C09
P0U3C010
P0U3D011
P0U3D012
P0U3D013
P0U401
P0U402
P0U403
P0U404
P0U405
P0U406
P0U407
P0U408
P0U409
P0U4010
P0U4011
P0U4012
P0U4013
P0U4014
P0U4015
P0U4016
P0U5A01
P0U5A02
P0U5A03
P0U5A04
P0U5A05
P0U5A06
P0U5B08
P0U5B09
P0U5B010
P0U5B011
P0U5B012
P0U5B013
P0U601
P0U602
P0U603
P0U604
P0U605
P0U606
P0U607
P0U608
P0U609
P0U6010
P0U6011
P0U6012
P0U6013
P0U6014
P0U6015
P0U6016
P0U701
P0U702
P0U703
P0U704
P0U705
P0U706
P0U707
P0U708
P0U709
P0U7010
P0U7011
P0U7012
P0U7013
P0U7014
P0U7015
P0U7016
P0U801
P0U802
P0U803
P0U804
P0U805
P0U806
P0U807
P0U808
P0U809
P0U8010
P0U8011
P0U8012
P0U8013
P0U8014
P0U8015
P0U8016
P0U901
P0U902
P0U903
P0U904
P0U905
P0U906
P0U907
P0U908
P0U909
P0U9010
P0U9011
P0U9012
P0U9013
P0U9014
P0U9015
P0U9016
P0U1001
P0U1002
P0U1003
P0U1004
P0U1005
P0U1006
P0U1007
P0U1008
P0U1009 P0U10010
P0U10011
P0U10012
P0U10013
P0U10014
P0U10015
P0U10016
P0U10017
P0U10018
P0U1101
P0U1102
P0U1103
P0U1201
P0U1202
P0U1203
P0U1204
P0U1301
P0U1302
P0U1303
P0U1304
P0U1401
P0U1402
P0U1403
P0U1404
P0C102
P0C202
P0C302
P0C401
P0C501
P0C601 P0C701
P0C801
P0C901
P0C1001
P0C1101
P0C1202
P0C1301
P0D101
P0G1014
P0G1018
P0G1019
P0G1020
P0G1021
P0G1022
P0G1023
P0G1024
P0G1025
P0G1026
P0G1027
P0G205
P0G2010
P0G2011
P0G305
P0G3010
P0G3011
P0G405
P0G4010
P0G4011
P0G501
P0G507
P0G509
P0G5010
P0G5011
P0G6010
P0G6011
P0G702
P0G702A
P0G702B
P0G703
P0G703A
P0G703B
P0G902
P0G1002
P0G1002A
P0G1002B
P0G1003
P0G1003A
P0G1003B
P0G1101
P0G1102
P0G1104
P0G1106
P0G1108
P0G11010
P0G11012
P0G11014
P0G11016
P0K107
P0K207
P0R502
P0R601
P0R701
P0R801
P0R901
P0S102
P0S201
P0S301
P0S401
P0S501
P0S601
P0S701
P0S801
P0S901
P0U1A07
P0U2A07
P0U3A07
P0U4012
P0U5A07
P0U602
P0U604
P0U608
P0U708
P0U7015
P0U808
P0U8014
P0U8015
P0U908
P0U9015
P0U1009
P0U1102
P0U1202
P0U1204
P0U1302
P0U1304
P0U1402
P0U1404
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
N0GND
P0CLK/
P0CLK/
P0DIR/
P0DIR/
P0GND
P0ZASIL0SMC81 GND
P0C101
P0G401
P0G701
P0G701A
P0G701B
P0U1103
P012 V +/03%
P0C201
P0C301
P0C402
P0C502
P0C802
P0C902
P0C1002
P0C1102
P0C1201
P0C1302
P0DS101
P0G606
P0PC01
P0R101
P0R201
P0R301
P0R401
P0R1102
P0R1202
P0R1602
P0R1701
P0R2401
P0R2501
P0R2601
P0S803
P0U405
P0U5A04
P0U5B010
P0U5B012
P0U603
P0U6016
P0U7016
P0U8013
P0U8016
P0U9016
P0U10010
P0U1101
P0RUN +
P0C602
P0R1302 P0U3C09
P0C702
P0R1402 P0U3D012
P0D102 P0D202
P0K108
P0K208
P0K308
P0S802
P0S903
P0D201
P0K307
P0S902
P0DS102 P0R602
P0DS201
P0G203
P0G303
P0G403
P0R2102
P0MOK40 > A
P0DS202 P0R702
P0DS301
P0G302
P0G402
P0R2202
P0MOK40 > C
P0DS302 P0R802
P0DS401
P0G1012
P0G204
P0G304
P0G404
P0R203
P0R2302
P0R2602
P0U1D08
P0U403
P0U6011
P0U705
P0U706
P0U707
P0U1403
P0B < MOK40
P0B < MOK40
P0B < MOK40
P0MOK40 > B
P0MOK40 > B
P0DS402 P0R902
P0DS601
P0R208
P0DS602
P0U1A01
P0U2A03
P0U2B04
P0DS701
P0R209
P0DS702
P0U2D011
P0DS801
P0R402
P0DS802
P0U10018
P0DS901
P0R403
P0DS902
P0U10017
P0DS1001 P0R404
P0DS1002
P0U10016 P0DS1101
P0R405
P0DS1102
P0U10015
P0DS1201
P0R406
P0DS1202
P0U10014
P0DS1301
P0R407
P0DS1302
P0U10013
P0DS1401
P0R408
P0DS1402
P0U1008
P0U10012
P0DS1501
P0R409
P0DS1502
P0U10011
P0G101
P0R1702
P0U3A01
P0U3A02
P0U3D013
P0IRQ CLR >
P0G102
P0R102
P0U701
P0U801
P0U901
P0A/B >
P0G103
P0R103
P0U802
P0STOP > SMC81
P0G104
P0R104
P0U805
P0M3 > SMC81
P0G105
P0R105
P0U8011
P0M2 > SMC81
P0G106
P0R106
P0U902
P0M1 > SMC81
P0G107
P0R107
P0U9014
P0DIR > SMC81
P0G108
P0R108
P0U905
P0EN > SMC81
P0G109
P0R109
P0U9011
P0CLK > SMC81
P0G1010
P0R205
P0U1A02
P0IRQ <
P0G1011
P0R204
P0U1C06
P0CLK < ZD100/PC
P0G1013
P0R202
P0R2402
P0U1E010
P0U406
P0U6014
P0U7012
P0U7013
P0U7014
P0U1203
P0A < MOK40
P0A < MOK40
P0A < MOK40
P0MOK40 >A
P0G1015
P0R307
P0U1F012
P0DIR/ TEST IRQ <
P0G1016
P0R207
P0S101
P0U5B013
P0OVR CLR >
P0G1017
P0R206
P0U1B04
P0OVR <
P0G201
P0G202
P0G206
P0G207
P0G208
P0G209
P0G301
P0G306
P0G307
P0G308
P0G309
P0G406
P0G407
P0G408
P0G409
P0G502
P0G11015
P0R1101
P0U402
P0U609
P0U709
P0U7010
P0U909
P0U9010
P0U1007
P0CLK
P0CLK
P0CLK
P0CLK < ZD100
P0CLK < ZD100 / C < MOK40
P0G503
P0G504
P0G505
P0G506
P0G11011
P0R1201
P0U407
P0U601
P0U703
P0U704
P0U9012
P0U9013
P0U1005
P0DIR
P0DIR
P0DIR
P0DIR < ZD100
P0DIR < ZD100 / TEST IRQ <
P0G508
P0G601
P0G602
P0R501
P0RUN 00
P0G603
P0G604
P0G605
P0G607
P0G608
P0G609
P0G801
P0G 1202
P0K203
P0R1801
P0A 0 CZERWONY
P0G802
P0K202
P0K204
P0A/ 0 ¯ó³TY
P0G803
P0K201
P0A* 0 NIEBIESKI
P0G804
P0G905
P0K304
P0A*/ 0 CZARNY
P0FAZA 0 A/
P0G805
P0G 1302
P0K301
P0R1901
P0B 0 BR¹ZOWY
P0G806
P0K102
P0K104
P0B/ 0 ZIELONY
P0G807
P0K101
P0B* 0 BIA³Y
P0G808
P0G903
P0K106
P0B*/ 0 FIOLETOWY
P0FAZA 0 B/
P0G901
P0R2001
P0ZASIL0SMC81 32V +
P0G904
P0G 1301
P0R1902
P0FAZA 0 B
P0G906
P0G 1201
P0R1802
P0FAZA 0 A
P0G1001
P0G1001A
P0G1001B
P0R2002
P0G1103
P0U804
P0U1001
P0STOP
P0G1105
P0U807
P0U1002
P0M3 >
P0G1107
P0U809
P0U1003
P0M2 >
P0G1109
P0U904
P0U1004
P0M1 >
P0G11013
P0U907
P0U1006
P0EN
P0K103
P0K302
P0K105
P0K205
P0K206
P0K305
P0K303
P0K306
P0PC02 P0R1002
P0R302
P0S302
P0U906
P0R303
P0S402
P0U903
P0R304
P0S502
P0U8010
P0R305
P0S602
P0U806
P0R306
P0S702
P0U803
P0R308
P0R309
P0R1001
P0U8012
P0R1301
P0U3B06
P0U404
P0U4013
P0R1401
P0U3A03
P0R1601
P0S202
P0U702
P0TEST IRQ <
P0R2101
P0U1201 P0R2201
P0U1301 P0R2301
P0U1401
P0R2502
P0U7011
P0U1303
P0C < MOK40
P0U1B03
P0U2D012
P0U2D013
P0U5B09
P0U1C05 P0U2C08
P0U1D09
P0U4015
P0U6012
P0U1E011
P0U4010
P0U6013
P0U1F013
P0U409
P0U6015
P0U2A01
P0U3D011
P0U5A01
P0U2A02
P0U2B06
P0U2B05
P0U3C08
P0U2C09
P0U2C010
P0U4016
P0U6010
P0U3B04
P0U3B05
P0U3C010
P0U5A03
P0U606
P0U401
P0U408
P0U4011
P0U4014
P0U5A02
P0U5A06
P0U5B011
P0U5A05
P0U5B08
P0U605
P0U607
P0U1A014
P0U2A014
P0U3A014
P0U5A014
P0CLK/
P0DIR/
P0GND
P0ZASIL0SMC81 GND
P012 V +/03%
P0RUN +
P0MOK40 > A
P0MOK40 > C
P0B < MOK40
P0MOK40 > B
P0IRQ CLR >
P0A/B >
P0STOP > SMC81
P0M3 > SMC81
P0M2 > SMC81
P0M1 > SMC81
P0DIR > SMC81
P0EN > SMC81
P0CLK > SMC81
P0IRQ <
P0CLK < ZD100/PC
P0DIR/ TEST IRQ <
P0OVR CLR >
P0OVR <
P0CLK
P0CLK < ZD100
P0CLK < ZD100 / C < MOK40
P0DIR
P0DIR < ZD100
P0DIR < ZD100 / TEST IRQ <
P0RUN 00
P0A 0 CZERWONY
P0A/ 0 ¯ó³TY
P0A* 0 NIEBIESKI
P0A*/ 0 CZARNY
P0FAZA 0 A/
P0B 0 BR¹ZOWY
P0B/ 0 ZIELONY
P0B* 0 BIA³Y
P0B*/ 0 FIOLETOWY
P0FAZA 0 B/
P0ZASIL0SMC81 32V +
P0FAZA 0 B
P0FAZA 0 A
P0STOP
P0M3 >
P0M2 >
P0M1 >
P0EN
P0TEST IRQ <
P0A < MOK40
P0MOK40 >A
P0C < MOK40
N0GND
P0C102
P0C202
P0C302
P0C401
P0C501
P0C601 P0C701
P0C801
P0C901
P0C1001
P0C1101
P0C1202
P0C1301
P0D101
P0G1014
P0G1018
P0G1019
P0G1020
P0G1021
P0G1022
P0G1023
P0G1024
P0G1025
P0G1026
P0G1027
P0G205
P0G2010
P0G2011
P0G305
P0G3010
P0G3011
P0G405
P0G4010
P0G4011
P0G501
P0G507
P0G509
P0G5010
P0G5011
P0G6010
P0G6011
P0G702
P0G702A
P0G702B
P0G703
P0G703A
P0G703B
P0G902
P0G1002
P0G1002A
P0G1002B
P0G1003
P0G1003A
P0G1003B
P0G1101
P0G1102
P0G1104
P0G1106
P0G1108
P0G11010
P0G11012
P0G11014
P0G11016
P0K107
P0K207
P0R502
P0R601
P0R701
P0R801
P0R901
P0S102
P0S201
P0S301
P0S401
P0S501
P0S601
P0S701
P0S801
P0S901
P0U1A07
P0U2A07
P0U3A07
P0U4012
P0U5A07
P0U602
P0U604
P0U608
P0U708
P0U7015
P0U808
P0U8014
P0U8015
P0U908
P0U9015
P0U1009
P0U1102
P0U1202
P0U1204
P0U1302
P0U1304
P0U1402
P0U1404
P0CLK/
P0DIR/
P0GND
P0ZASIL0SMC81 GND
P0C101
P0G401
P0G701
P0G701A
P0G701B
P0U1103
P012 V +/03%
P0C201
P0C301
P0C402
P0C502
P0C802
P0C902
P0C1002
P0C1102
P0C1201
P0C1302
P0DS101
P0G606
P0PC01
P0R101
P0R201
P0R301
P0R401
P0R1102
P0R1202
P0R1602
P0R1701
P0R2401
P0R2501
P0R2601
P0S803
P0U405
P0U5A04
P0U5B010
P0U5B012
P0U603
P0U6016
P0U7016
P0U8013
P0U8016
P0U9016
P0U10010
P0U1101
P0RUN +
P0C602
P0R1302 P0U3C09
P0C702
P0R1402 P0U3D012
P0D102 P0D202
P0K108
P0K208
P0K308
P0S802
P0S903
P0D201
P0K307
P0S902
P0DS102 P0R602
P0DS201
P0G203
P0G303
P0G403
P0R2102
P0MOK40 > A
P0DS202 P0R702
P0DS301
P0G302
P0G402
P0R2202
P0MOK40 > C
P0DS302 P0R802
P0DS401
P0G1012
P0G204
P0G304
P0G404
P0R203
P0R2302
P0R2602
P0U1D08
P0U403
P0U6011
P0U705
P0U706
P0U707
P0U1403
P0B < MOK40
P0MOK40 > B
P0DS402 P0R902
P0DS601
P0R208
P0DS602
P0U1A01
P0U2A03
P0U2B04
P0DS701
P0R209
P0DS702
P0U2D011
P0DS801
P0R402
P0DS802
P0U10018
P0DS901
P0R403
P0DS902
P0U10017
P0DS1001 P0R404
P0DS1002
P0U10016 P0DS1101
P0R405
P0DS1102
P0U10015
P0DS1201
P0R406
P0DS1202
P0U10014
P0DS1301
P0R407
P0DS1302
P0U10013
P0DS1401
P0R408
P0DS1402
P0U1008
P0U10012
P0DS1501
P0R409
P0DS1502
P0U10011
P0G101
P0R1702
P0U3A01
P0U3A02
P0U3D013
P0IRQ CLR >
P0G102
P0R102
P0U701
P0U801
P0U901
P0A/B >
P0G103
P0R103
P0U802
P0STOP > SMC81
P0G104
P0R104
P0U805
P0M3 > SMC81
P0G105
P0R105
P0U8011
P0M2 > SMC81
P0G106
P0R106
P0U902
P0M1 > SMC81
P0G107
P0R107
P0U9014
P0DIR > SMC81
P0G108
P0R108
P0U905
P0EN > SMC81
P0G109
P0R109
P0U9011
P0CLK > SMC81
P0G1010
P0R205
P0U1A02
P0IRQ <
P0G1011
P0R204
P0U1C06
P0CLK < ZD100/PC
P0G1013
P0R202
P0R2402
P0U1E010
P0U406
P0U6014
P0U7012
P0U7013
P0U7014
P0U1203
P0A < MOK40
P0MOK40 >A
P0G1015
P0R307
P0U1F012
P0DIR/ TEST IRQ <
P0G1016
P0R207
P0S101
P0U5B013
P0OVR CLR >
P0G1017
P0R206
P0U1B04
P0OVR <
P0G201
P0G202
P0G206
P0G207
P0G208
P0G209
P0G301
P0G306
P0G307
P0G308
P0G309
P0G406
P0G407
P0G408
P0G409
P0G502
P0G11015
P0R1101
P0U402
P0U609
P0U709
P0U7010
P0U909
P0U9010
P0U1007
P0CLK
P0CLK < ZD100
P0CLK < ZD100 / C < MOK40
P0G503
P0G504
P0G505
P0G506
P0G11011
P0R1201
P0U407
P0U601
P0U703
P0U704
P0U9012
P0U9013
P0U1005
P0DIR
P0DIR < ZD100
P0DIR < ZD100 / TEST IRQ <
P0G508
P0G601
P0G602
P0R501
P0RUN 00
P0G603
P0G604
P0G605
P0G607
P0G608
P0G609
P0G801
P0G 1202
P0K203
P0R1801
P0A 0 CZERWONY
P0G802
P0K202
P0K204
P0A/ 0 ¯ó³TY
P0G803
P0K201
P0A* 0 NIEBIESKI
P0G804
P0G905
P0K304
P0A*/ 0 CZARNY
P0FAZA 0 A/
P0G805
P0G 1302
P0K301
P0R1901
P0B 0 BR¹ZOWY
P0G806
P0K102
P0K104
P0B/ 0 ZIELONY
P0G807
P0K101
P0B* 0 BIA³Y
P0G808
P0G903
P0K106
P0B*/ 0 FIOLETOWY
P0FAZA 0 B/
P0G901
P0R2001
P0ZASIL0SMC81 32V +
P0G904
P0G 1301
P0R1902
P0FAZA 0 B
P0G906
P0G 1201
P0R1802
P0FAZA 0 A
P0G1001
P0G1001A
P0G1001B
P0R2002
P0G1103
P0U804
P0U1001
P0STOP
P0G1105
P0U807
P0U1002
P0M3 >
P0G1107
P0U809
P0U1003
P0M2 >
P0G1109
P0U904
P0U1004
P0M1 >
P0G11013
P0U907
P0U1006
P0EN
P0K103
P0K302
P0K105
P0K205
P0K206
P0K305
P0K303
P0K306
P0PC02 P0R1002
P0R302
P0S302
P0U906
P0R303
P0S402
P0U903
P0R304
P0S502
P0U8010
P0R305
P0S602
P0U806
P0R306
P0S702
P0U803
P0R308
P0R309
P0R1001
P0U8012
P0R1301
P0U3B06
P0U404
P0U4013
P0R1401
P0U3A03
P0R1601
P0S202
P0U702
P0TEST IRQ <
P0R2101
P0U1201 P0R2201
P0U1301 P0R2301
P0U1401
P0R2502
P0U7011
P0U1303
P0C < MOK40
P0U1B03
P0U2D012
P0U2D013
P0U5B09
P0U1C05 P0U2C08
P0U1D09
P0U4015
P0U6012
P0U1E011
P0U4010
P0U6013
P0U1F013
P0U409
P0U6015
P0U2A01
P0U3D011
P0U5A01
P0U2A02
P0U2B06
P0U2B05
P0U3C08
P0U2C09
P0U2C010
P0U4016
P0U6010
P0U3B04
P0U3B05
P0U3C010
P0U5A03
P0U606
P0U401
P0U408
P0U4011
P0U4014
P0U5A02
P0U5A06
P0U5B011
P0U5A05
P0U5B08
P0U605
P0U607
P0U1A014
P0U2A014
P0U3A014
P0U5A014
Rysunek 3.12: Schemat płytki drukowanej

3.5. Płytka edukacyjna do analizy silnika krokowego — PEdASK 44
3.5.4 Układ wyzwalania przerwania sprzętowego
Ten fragment układu oparty jest na zatrzasku czterobitowym U4 oraz kompa-
ratorze danych U6. Układ U5 stanowi licznik impulsów generowanego przerwania
w odpowiedzi na zmianę danych na wejściu układu U6. Dalszy opis działania układu
płytki od strony praktycznej znajduje się w rozdziale 3.8.2.
3.5.5 Konfiguracja uzwojeń silnika
Konfiguracja połączeń uzwojeń silnika przy wykorzystaniu przełączników i prze-
kaźników została opisana na schematach 3.14, 3.13. Na pierwszym schemacie 3.13
zamieszczono opis połączeń uzwojeń silnika wraz z ustawieniem przełączników od-
powiedzialnych za sterowanie przekaźnikami K1− K3 3.14. Wykreślony układ połą-
czeń powstał na postawie przeprowadzonych pomiarów rezystancji i zwarć między
poszczególnymi wyprowadzeniami G8 płytki PEDASK. Przeprowadzony pomiar jest
propozycją ćwiczenia dla studentów na tym stanowisku.
Na drugim schemacie zilustrowano fizyczne połączenia poszczególnych faz sil-
nika, przejście przez okablowanie oraz wyjście faz ze sterownika silnika krokowego
SMC81RP. Zaznaczono gniazda G12, G13 wraz z bocznikami prądowymi na fazach
silnika. Przy wykonywaniu pomiarów należy bezwzględnie zastosować się do uwag
zamieszczonych w rozdziale 3.12.
1
1
2
2
3
3
4
4
D D
C C
B B
A A
Title
Number RevisionSize
A4
Date: 2007-01-30 Sheet ofFile: W:\work_studia\..\przelaczanie_uzwojen.schdocDrawn By:
10mH
L4
Inductor10mH
L3
Inductor10mH
L2
Inductor10mH
L1
Inductor
AA/A*A*/BB/B*/ B*
10mH
L4
Inductor10mH
L3
Inductor10mH
L2
Inductor10mH
L1
Inductor
AA/A*A*/BB/B*/ B*
Faza - AFaza - A/Faza - BFaza - B/
10mH
L4
Inductor10mH
L3
Inductor10mH
L2
Inductor10mH
L1
Inductor
AA/A*A*/BB/B*/ B*
10mH
L4
Inductor10mH
L3
Inductor10mH
L2
Inductor10mH
L1
Inductor
AA/A*A*/BB/B*/ B*
Ustawienie wyłączników:
SZER./ JEDNORÓWN. UZW.
D D
Ustawienie wyłączników:
SZER./ JEDNORÓWN. UZW.
G D
Ustawienie wyłączników:
SZER./ JEDNORÓWN. UZW.
G G
Ustawienie wyłączników:
SZER./ JEDNORÓWN. UZW.
D G
Połączenie uzwojeń na PEDASK
Anna Cieśnik
Położenie przełączników opisane powyżej na schemacie połączeń: D - dół, G - góraodpowiadają stanowi dwóch przełączników umieszczonych na płytce PEDASK.
P0L101 P0L102
P0L101 P0L102
P0L101 P0L102
P0L101 P0L102
P0L201 P0L202
P0L201 P0L202
P0L201 P0L202
P0L201 P0L202
P0L301 P0L302
P0L301 P0L302
P0L301 P0L302
P0L301 P0L302
P0L401 P0L402
P0L401 P0L402
P0L401 P0L402
P0L401 P0L402
P0FAZA 0 B/
P0L101 P0L202 P0L102 P0L202 P0L301
P0L302
P0L302
P0L302
P0L302
P0FAZA 0 B
P0L401 P0L402
P0FAZA 0 B/
P0FAZA 0 B
P0FAZA 0 B/
P0L101 P0L202 P0L102 P0L202 P0L301
P0L302
P0FAZA 0 B
P0L401 P0L402
Rysunek 3.13: Konfiguracja połączeń uzwojeń silnika

3.5. Płytka edukacyjna do analizy silnika krokowego — PEdASK 45
1
1
2
2
3
3
4
4
H H
G G
F F
E E
D D
C C
B B
A A
Title
Number RevisionSize
A3
Date: 2007-02-01 Sheet ofFile: W:\work_studia\..\silnik przełączniki.SCHDOCDrawn By:
Zasil.SMC81 32V -Zasil.SMC81 32V +
Faza - AFaza - A/Faza - BFaza - B/
12345678
G8
OUT: 57 BYG 081
123456
G9
IN: SMC 81
A - CzerwonyA/ - ŻółtyA* - NiebieskiA*/ - CzarnyB - BrązowyB/ - ZielonyB* - BiałyB*/ - Fioletowy
R20 = 0,1 Ohm /2W
R20
0,1 Ohm /2W
R18
0,1 Ohm /2W
R19
R18 =R19 =
23
1
S8
SW-SPDT
23
1
S9
SW-SPDT
1
23
G10 PWR2.5
K1
Relay-DPDT
K2
Relay-DPDT
K3
Relay-DPDTD2Diode 1N4148
D1Diode 1N4148
RÓWNOLEGLE UZW.
JEDNO UZW.
SZEREGOWO UZW.
RÓWNOLEGLE UZW.
IN: ZN 100
OUT: ZN 100
Anna Cieśnik
VCC = 5V
Q?NPN
Q?NPN Q?
NPN
Q?NPN
Q?PNP
Q?PNP Q?
PNP
Q?PNP
10mH
L1Inductor
10mH
L2Inductor
10mH
L4
Inductor10mH
L3
Inductor
M
SMC81RP
Anna Cieśnik
Przełączanie uzwojeń silnika - przekaźniki
12
G 12
OUT
12
G 13
OUT
123456
W9 P/B
Header 6 PRZEWODY PODŁĄCZONE NA STAŁE Z GNIAZDEM 6-PINOWYM
GND - NIEBIESKIVcc - CZERWONY
FAZA B/ - ZIELONYFAZA B - BRĄZOWYFAZA A/ - ZÓŁTYFAZA A - CZERWONY
Wycinek płytki z elementami do przełączania uzwojeń silnika
PEDASK
P0D101
P0D102
P0D201
P0D202
P0G801
P0G802
P0G803
P0G804
P0G805
P0G806
P0G807
P0G808
P0G901
P0G902
P0G903
P0G904
P0G905
P0G906
P0G1001 P0G1001A P0G1001B
P0G1002 P0G1002A P0G1002B
P0G1003 P0G1003A P0G1003B
P0G 1201
P0G 1202
P0G 1301
P0G 1302
P0K101
P0K102
P0K103
P0K104
P0K105
P0K106
P0K107 P0K108
P0K201
P0K202
P0K203
P0K204
P0K205
P0K206
P0K207 P0K208
P0K301
P0K302
P0K303
P0K304
P0K305
P0K306
P0K307 P0K308
P0L101
P0L102
P0L201
P0L202
P0L301 P0L302 P0L401 P0L402
P0Q?01
P0Q?02
P0Q?03
P0Q?01
P0Q?02
P0Q?03
P0Q?01
P0Q?02
P0Q?03
P0Q?01
P0Q?02
P0Q?03
P0Q?01
P0Q?02
P0Q?03
P0Q?01
P0Q?02
P0Q?03
P0Q?01
P0Q?02
P0Q?03
P0Q?01
P0Q?02
P0Q?03
P0R1801 P0R1802
P0R1901 P0R1902
P0R2001 P0R2002
P0S801
P0S802
P0S803
P0S901
P0S902
P0S903
P0W9 P/B01
P0W9 P/B02
P0W9 P/B03
P0W9 P/B04
P0W9 P/B05
P0W9 P/B06
P0D101
P0K107
P0K207
P0S801
P0S901
P0D102
P0D202
P0K108
P0K208 P0K308
P0S802
P0S903
P0D201
P0K307
P0S902
P0G801
P0G 1202
P0K203
P0R1801
P0A 0 CZERWONY
P0G802
P0K202
P0K204
P0A/ 0 ¯ó³TY
P0G803
P0K201
P0A* 0 NIEBIESKI
P0G804
P0G905
P0K304
P0A*/ 0 CZARNY
P0FAZA 0 A/
P0G805
P0G 1302
P0K301
P0R1901
P0B 0 BR¹ZOWY
P0G806
P0K102
P0K104
P0B/ 0 ZIELONY
P0G807
P0K101
P0B* 0 BIA³Y
P0G808
P0G903
P0K106
P0B*/ 0 FIOLETOWY
P0FAZA 0 B/
P0G901
P0R2001
P0ZASIL0SMC81 32V +
P0G902
P0G1002 P0G1002A P0G1002B
P0G1003 P0G1003A P0G1003B
P0ZASIL0SMC81 32V 0
P0G904
P0G 1301
P0R1902 P0FAZA 0 B
P0G906
P0G 1201
P0R1802 P0FAZA 0 A
P0G1001 P0G1001A P0G1001B P0R2002
P0K103
P0K302
P0K105
P0K205
P0K206
P0K305
P0K303
P0K306
P0L101
P0L102
P0L201
P0L202
P0L301 P0L302 P0L401 P0L402
P0Q?01
P0Q?01
P0Q?01
P0Q?01
P0W9 P/B02 P0GND 0 NIEBIESKI
P0Q?02
P0Q?03
P0Q?03
P0W9 P/B06 P0FAZA A 0 CZERWONY
P0S803
P0A 0 CZERWONY
P0A/ 0 ¯ó³TY
P0A* 0 NIEBIESKI
P0A*/ 0 CZARNY
P0FAZA 0 A/
P0B 0 BR¹ZOWY
P0B/ 0 ZIELONY
P0B* 0 BIA³Y
P0B*/ 0 FIOLETOWY
P0FAZA 0 B/
P0ZASIL0SMC81 32V +
P0ZASIL0SMC81 32V 0
P0FAZA 0 B
P0FAZA 0 A
P0GND 0 NIEBIESKI
P0FAZA A 0 CZERWONY
P0D101
P0K107
P0K207
P0S801
P0S901
P0D102
P0D202
P0K108
P0K208 P0K308
P0S802
P0S903
P0D201
P0K307
P0S902
P0G801
P0G 1202
P0K203
P0R1801
P0A 0 CZERWONY
P0G802
P0K202
P0K204
P0A/ 0 ¯ó³TY
P0G803
P0K201
P0A* 0 NIEBIESKI
P0G804
P0G905
P0K304
P0A*/ 0 CZARNY
P0FAZA 0 A/
P0G805
P0G 1302
P0K301
P0R1901
P0B 0 BR¹ZOWY
P0G806
P0K102
P0K104
P0B/ 0 ZIELONY
P0G807
P0K101
P0B* 0 BIA³Y
P0G808
P0G903
P0K106
P0B*/ 0 FIOLETOWY
P0FAZA 0 B/
P0G901
P0R2001
P0ZASIL0SMC81 32V +
P0G902
P0G1002 P0G1002A P0G1002B
P0G1003 P0G1003A P0G1003B
P0ZASIL0SMC81 32V 0
P0G904
P0G 1301
P0R1902 P0FAZA 0 B
P0G906
P0G 1201
P0R1802 P0FAZA 0 A
P0G1001 P0G1001A P0G1001B P0R2002
P0K103
P0K302
P0K105
P0K205
P0K206
P0K305
P0K303
P0K306
P0L101
P0L102
P0L201
P0L202
P0L301 P0L302 P0L401 P0L402
P0Q?01
P0W9 P/B02 P0GND 0 NIEBIESKI
P0Q?02
P0Q?03
P0W9 P/B06 P0FAZA A 0 CZERWONY
P0S803
Rysunek 3.14: Schemat połączeń uzwojeń silnika z fragmentem opisu płytki
drukowanej

3.5. Płytka edukacyjna do analizy silnika krokowego — PEdASK 46
3.5.6 Wyprowadzenie sygnałów typu OC
Rysunek 3.15: Schemat wyjścia typu otwarty kolektor [2]
Wykorzystany w budowie płytki PEdASK układ SN74LS05N zawiera cześć in-
werterów z wyjściem typu otwarty kolektor OC ang. Open Collector. Wiadomo
również, że pozostawienie „w powietrzu” wejść bramek serii TTL jest równoważne
ze stanem wysokim. Aby ta zasada była utrzymana dla wysokich częstotliwości
przełączania stanów, należy za wyjściem bramki z otwartym kolektorem umieścić
rezystor podciągający (ang. pull-up resistor) [11]. Oporność tego rezystora powinna
wynosić 4, 7kΩ [10]. Bez niego układ będzie działał, jednak nie przy wysokich
częstotliwościach.
Układ taki jest wymagany w przypadku wykorzystania portów kontrolnych jako
piny wejściowe ([10]). Rozwiązuje to konflikt, który miałby miejsce w przypadku
bezpośredniego połączenia zewnętrznego układu, który dawałby stan logiczny „1”
na wejście portu, a ten z kolei próbowałby ściągną potencjał do stanu logicznego
„0”. Groziłoby to uszkodzeniem układu lub poru LPT.
W ogólności bramki z otwartym kolektorem mają przydatną zaletę — pozwalają
na zrealizowanie funkcji AND lub OR „na drucie” ([11]), (ang. wired-AND lub
ang. wired-OR). Jest to własność dawniej często stosowana w układach.
Rezystory podciągające
Zasadniczą funkcją rezystorów podpiętych na wejściu układów logicznych oraz
na wejściu portu LPT komputera jest zapewnienie „czystego” stanu logicznego dla
potencjału 5V . Rezystory podciągające drabinkowe 4, 7kΩ świetnie nadają się do
tego typu zastosowań.
3.5.7 Zasilanie układu
Zasilanie układu powinno być utrzymane w standardzie TTL (+5V). Zrealizo-
wano je na układzie (U11) µA7805 — wykorzystywany m.in w zestawie edukacyj-

3.6. Dokumentacja elektroniki PEdASK 47
nym ZL1MCS51 [22]. Dobór wartości pojemności na podstawie sugestii zawartych
w dokumentacji technicznej [24]. Wejściowy potencjał jest w zakresie 9 − 12V ,
w zależności od obciążenia.
3.6 Dokumentacja elektroniki PEdASK
Spis elementów płytki drukowanej zamieszczono w tabelach 3.11..3.12. W do-
datku A.3 umieszczono skrócony opis wykorzystanych układów scalonych sporzą-
dzony na podstawie instrukcji Texas Instruments [24]. Pozostałe elementy można
odszukać w katalogu np. ELFA [3].
Tablica 3.11: Spis układów scalonych użytych do montażu płytki drukowanejPEdASK
Nazwa Opis elementu Numer elementu Element biblioteki Ilość
SN74HC05N Hex Inverter with Open-Drain Outputs U1 SN74HC05N 1SN74HC00N Quadruple 2-Input Positive-NAND Gate U2, U3 SN74HC00N 2SN74LS75N 4-Bit Bistable Latch U4 SN74LS75N 1SN74HC74N Dual D-Type Positive-Edge-Triggered U5 SN74HC74N 1
Flip-Flop with Clear and PresetSN7485N 4-Bit Magnitude Comparator U6 SN7485N 1SN74HCT157N Quadruple 2-Line to 1-Line Data U7, U8, U9 SN74HCT157N 3
Selector/MultiplexerULN2803A U10 Component 1 1µA7805 Positive-Voltage Regulator U11 µA78L05CPKR 1PC814 Optoisolator U12, U13, U14 Optoisolator1 3
3.7 Płytka drukowana
3.7.1 Zasady projektowania płytki drukowanej
Odsprzęganie zasilania
Wszelkie układy cyfrowe pobierają prąd zasilający w sposób impulsowy, dlatego
zapewniono szerokie i możliwie krótkie ścieżki zasilania i masy. Są one szerokie,
nawet na kilka milimetrów, a masa została rozprowadzona po szerokim paśmie wokół
układu na płytce drukowanej.
Przy projektowaniu płytki drukowanej zalecany jest zwarty montaż układów cy-
frowych. Miniaturyzacja i upakowanie są zalecane [11]. Ze względu na zastosowaną
technologię płytki dwustronnej ze złączówkami i edukacyjny charakter płytki, bar-
dziej skondensowana architektura nie była możliwa.
W celu zredukowania impulsów prądu, które popłyną podczas przełączania, za-
stosowano lokalne kondensatory odsprzęgające o małej pojemności przy pomiędzy
ścieżką zasilania i masy dochodzącą do układu scalonego.
Zalecane jest w niektórych źródłach montowanie jednego kondensatora filtrują-
cego w pobliżu każdego układu scalonego (np. kondensator ceramiczny o pojemności

3.7. Płytka drukowana 48
Tablica 3.12: Spis pozostałych elementów do montażu płytki drukowanej PE-dASK
Nazwa Opis elementu Numer elementu Element biblioteki Ilość
Cap Pol1 Polarized Capacitor (Radial) C1, C2, C3 Cap Pol1 3Cap Capacitor C4, C5, C6, C7, Cap 10
C8, C9, C10, C11,C12, C13
Diode 1N4148 High Conductance Fast Diode D1, D2 Diode 1N4148 2+5V Typical INFRARED GaAs LED DS1 LED0 1A Typical INFRARED GaAs LED DS2 LED0 1C Typical INFRARED GaAs LED DS3 LED0 1B Typical INFRARED GaAs LED DS4 LED0 1LED5 Typical INFRARED GaAs LED DS6 LED0 1LED6 Typical INFRARED GaAs LED DS7 LED0 1STOP Typical INFRARED GaAs LED DS8 LED0 1M3 Typical INFRARED GaAs LED DS9 LED0 1M2 Typical INFRARED GaAs LED DS10 LED0 1M1 Typical INFRARED GaAs LED DS11 LED0 1DIR Typical INFRARED GaAs LED DS12 LED0 1ENR Typical INFRARED GaAs LED DS13 LED0 1CLK Typical INFRARED GaAs LED DS14 LED0 1/CLK Typical INFRARED GaAs LED DS15 LED0 1LPT - PC Receptacle Assembly, G1 D Connector 25 1
25 Position, Right AngleLP 100/MD 100 Receptacle Assembly, G2, G3 D Connector 9 2
9 Position, Right AngleMOK 40 Receptacle Assembly, G4 D Connector 9 1
9 Position, Right AngleZD 100 (2) Receptacle Assembly, G5 D Connector 9 1
9 Position, Right AngleZD 100 (1) Receptacle Assembly, G6 D Connector 9 1
9 Position, Right AnglePWR2.1 Low Voltage Power Supply Conn. G7 PWR2.1 1OUT: 57 BYG 081 Header, 8-Pin G8 Header 8 1IN: SMC 81 Header, 6-Pin G9 Header 6 1PWR2.5 Low Voltage Power Supply Conn. G10 PWR2.5 1OUT: SMC 81 Header, 8-Pin, Dual row G11 Header 8X2 1OUT Header, 2-Pin, Right Angle G 12, G 13 Header 2H 2Relay-DPDT Dual-Pole Dual-Throw Relay K1, K2, K3 Relay-DPDT 3DS5 Typical INFRARED GaAs LED PC LED0 18x 4K7 R1, R2, R3, R4 RezDrab 8x 4Res2 Resistor R5, R6, R7, R8, Res2 21
R9, R10, R11, R12,R13, R14, R16, R17,R18, R19, R20, R21,R22, R23, R24, R25,R26
SW-PB2 Switch S1 SW-PB 1SW-PB1 Switch S2 SW-PB 1EN Single-Pole, Single-Throw Sw. S3 SW-SPST 1M1 Single-Pole, Single-Throw Sw. S4 SW-SPST 1M2 Single-Pole, Single-Throw Sw. S5 SW-SPST 1M3 Single-Pole, Single-Throw Sw. S6 SW-SPST 1STOP Single-Pole, Single-Throw Sw. S7 SW-SPST 1SW-SPDT SPDT Subminiature Toggle Sw., S8, S9 SW-SPDT 2
Right Angle Mounting,Vertical Actuation
47..100nF). W urządzeniach z układami 74HC lub 74HCT wskazany jest jeden kon-
densator elektrolityczny o pojemności 10..100/muF na pięć układów scalonych oraz
jeden kondensator ceramiczny dla każdego układu [11].

3.7. Płytka drukowana 49
3.7.2 Projekt PCB płytki drukowanej PEdASK
Do wykonania całości projektu – schematu układu oraz schematu PCB, wyko-
rzystano rozbudowane narzędzie Altium Designer 6.0, którego licencja została in-
dywidualnie wykupiona na rok na potrzeby wykonania pracy inżynierskiej. Projekt
płytki PCB został wykonany przez nałożenie kilku warstw oznaczonych kolorami,
m.in.
niebieski – ang. bottom layer, warstwa mozaiki ścieżek,
czerwony – ang. top layer, połączenia górnej warstwy (złączówki),
żółty – ang. top overlay, elementy układu pobrane z biblioteki programu z opisami,
Złożenie wszystkich warstw na jednym schemacie zamieszczono na rys. 3.16
C1
P0C10+ P0C100
C2 P0C201
P0C202
C3
P0C301
P0C302
C4
P0C401
P0C402
C5
P0C501
P0C502
C6
P0C601
P0C602
C7
P0C701
P0C702
C8 P0C801 P0C802
C9 P0C901 P0C902
C10
P0C1001
P0C1002
C11
P0C1101
P0C1102
C12
P0C1201
P0C1202
C13
P0C1301
P0C1302
D1 P0D101
P0D102
D2 P0D201
P0D202
DS1
P0DS10A
P0DS10K
DS2 P0DS20A
P0DS20K
DS3
P0DS30A
P0DS30K
DS4
P0DS40A
P0DS40K
DS5 P0DS50A
P0DS50K
DS6
P0DS60A
P0DS60K
DS7
P0DS70A
P0DS70K
DS8
P0DS80A
P0DS80K
DS9
P0DS90A
P0DS90K
DS10
P0DS100A
P0DS100K
DS11
P0DS110A
P0DS110K
DS12
P0DS120A
P0DS120K
DS13
P0DS130A
P0DS130K
DS14
P0DS140A
P0DS140K
DS15
P0DS150A
P0DS150K
G1
P0G100
P0G101
P0G102
P0G103
P0G104
P0G105
P0G106
P0G107
P0G108
P0G109
P0G1010
P0G1011
P0G1012
P0G1013
P0G1014
P0G1015
P0G1016
P0G1017
P0G1018
P0G1019
P0G1020
P0G1021
P0G1022
P0G1023
P0G1024
P0G1025
G2
P0G20
P0G201
P0G202
P0G203
P0G204
P0G205
P0G206
P0G207
P0G208
P0G209
G3
P0G30
P0G301
P0G302
P0G303
P0G304
P0G305
P0G306
P0G307
P0G308
P0G309
G4
P0G40
P0G401
P0G402
P0G403
P0G404
P0G405
P0G406
P0G407
P0G408
P0G409
G5
P0G50
P0G501
P0G502
P0G503
P0G504
P0G505
P0G506
P0G507
P0G508
P0G509
G6
P0G60
P0G601
P0G602
P0G603
P0G604
P0G605
P0G606
P0G607
P0G608
P0G609
G7
P0G70265
P0G70266
P0G70267
P0G70268 P0G70269
P0G70270
P0G70271
P0G70272 P0G70273
G8
P0G801
P0G802
P0G803
P0G804
P0G805
P0G806
P0G807
P0G808
G9
P0G901
P0G902
P0G903
P0G904
P0G905
P0G906
G10 P0G100265 P0G100266
P0G100267
P0G100268 P0G100269
P0G100270 P0G100271
P0G100272 P0G100273
G11
P0G1100
P0G1101
P0G1102
P0G1103 P0G1104
P0G1105 P0G1106
P0G1107 P0G1108
P0G1109 P0G11010
P0G11011 P0G11012
P0G11013 P0G11014
P0G11015 P0G11016
K1 P0K10175
P0K10176
P0K10177
P0K10179
P0K10180
P0K10181
P0K10182
P0K10184
K2 P0K20175
P0K20176
P0K20177
P0K20179
P0K20180
P0K20181
P0K20182
P0K20184
K3
P0K30175
P0K30176
P0K30177
P0K30179
P0K30180
P0K30181
P0K30182
P0K30184
R1
P0R101
P0R102
P0R103
P0R104
P0R105
P0R106
P0R107
P0R108
P0R109
R2
P0R201
P0R202
P0R203
P0R204
P0R205
P0R206
P0R207
P0R208
P0R209
R3
P0R301
P0R302
P0R303
P0R304
P0R305
P0R306
P0R307
P0R308
P0R309
R4
P0R401
P0R402
P0R403
P0R404
P0R405
P0R406
P0R407
P0R408
P0R409
R5
P0R501 P0R502
R6
P0R601
P0R602
R7 P0R701 P0R702 R8
P0R801 P0R802
R9
P0R901
P0R902
R10
P0R1001
P0R1002
R11
P0R1101
P0R1102 R12
P0R1201
P0R1202
R13
P0R1301
P0R1302
R14
P0R1401
P0R1402
R16
P0R1601
P0R1602
R17 P0R1701 P0R1702
R18
P0R1801
P0R1802
R19 P0R1901
P0R1902
R20
P0R2001 P0R2002
S1
P0S101 P0S101A
P0S102 P0S102A
S2
P0S201 P0S201A
P0S202 P0S202A
S3
P0S30
P0S30293
P0S30294
P0S30295
P0S30296
P0S30298
P0S30299
S4
P0S40
P0S40293
P0S40294
P0S40295
P0S40296 P0S40298
P0S40299
S5
P0S50
P0S50293
P0S50294
P0S50295
P0S50296
P0S50298
P0S50299
S6
P0S60
P0S60293
P0S60294
P0S60295
P0S60296
P0S60298
P0S60299
S7
P0S70
P0S70293
P0S70294
P0S70295
P0S70296
P0S70298
P0S70299
S8
P0S80
P0S80293
P0S80294
P0S80295
P0S80296 P0S80298
P0S80299
S9
P0S90
P0S90293
P0S90294
P0S90295
P0S90296 P0S90298
P0S90299
U1
P0U101
P0U102
P0U103
P0U104
P0U105
P0U106
P0U107 P0U108
P0U109
P0U1010
P0U1011
P0U1012
P0U1013
P0U1014
U2
P0U201
P0U202
P0U203
P0U204
P0U205
P0U206
P0U207 P0U208
P0U209
P0U2010
P0U2011
P0U2012
P0U2013
P0U2014
U3
P0U301
P0U302
P0U303
P0U304
P0U305
P0U306
P0U307 P0U308
P0U309
P0U3010
P0U3011
P0U3012
P0U3013
P0U3014
U4
P0U401
P0U402
P0U403
P0U404
P0U405
P0U406
P0U407
P0U408 P0U409
P0U4010
P0U4011
P0U4012
P0U4013
P0U4014
P0U4015
P0U4016
U5
P0U501
P0U502
P0U503
P0U504
P0U505
P0U506
P0U507 P0U508
P0U509
P0U5010
P0U5011
P0U5012
P0U5013
P0U5014
U6
P0U601
P0U602
P0U603
P0U604
P0U605
P0U606
P0U607
P0U608 P0U609
P0U6010
P0U6011
P0U6012
P0U6013
P0U6014
P0U6015
P0U6016
U7
P0U701
P0U702
P0U703
P0U704
P0U705
P0U706
P0U707
P0U708 P0U709
P0U7010
P0U7011
P0U7012
P0U7013
P0U7014
P0U7015
P0U7016
U8
P0U801
P0U802
P0U803
P0U804
P0U805
P0U806
P0U807
P0U808 P0U809
P0U8010
P0U8011
P0U8012
P0U8013
P0U8014
P0U8015
P0U8016
U9 P0U901
P0U902
P0U903
P0U904
P0U905
P0U906
P0U907
P0U908 P0U909
P0U9010
P0U9011
P0U9012
P0U9013
P0U9014
P0U9015
P0U9016
U10
P0U1001
P0U1002
P0U1003
P0U1004
P0U1005
P0U1006
P0U1007
P0U1008
P0U1009
P0U10010
P0U10011
P0U10012
P0U10013
P0U10014
P0U10015
P0U10016
P0U10017
P0U10018
U11
P0U1101
P0U1102
P0U1103
Rysunek 3.16: Projekt PCB płytki drukowanej PEdASK wykonany za po-
mocą programu Altium Designer 6.0
3.7.3 Wizualizacja płytki
Przed przystąpieniem do fizycznego wykonania układu, dzięki wykorzystywa-
nemu oprogramowaniu Altium Designer 6.0 otrzymano wizualizację płytki druko-
wanej z naniesionymi elementami. Obraz ten dał przestrzenne wyobrażenie budo-
wanego układu i rozmieszczenia elementów.

3.7. Płytka drukowana 50
Rysunek 3.17: Wizualizacja płytki PEdASK w programie Altium Designer 6.0
3.7.4 Technologia wykonania płytki drukowanej
Proces wytwarzania płytki drukowanej2
1. Przygotowanie „kliszy mozaiki płytki” — wykorzystano środowisko Altium
Designer schemat PCB.
2. Wydruk na drukarce laserowej mozaiki ścieżek na folii bezbarwnej w taki spo-
sób, aby metodą „stykową” można było naświetlić warstwę światłoczułą la-
kieru naniesionego na część miedzianą laminatu płytki.
3. Przygotowanie laminatu obejmuje:
• wycięcie z marginesem około 2cm wokół przewidywanego obszaru na-
świetlania płytki,
• odtłuszczenie części miedzianej laminatu i naniesienie sprajem „Pozitiv”
cienkiej równomiernej warstwy w przyciemnionym pomieszczeniu,
• poddanie suszeniu płytki z naniesioną warstwą światłoczułą w ciemni
(np. szczelnym pudełku kartonowym),
• suszenie — przebiega ono 1h w temp. 70oC lub dobę w temperaturze
pokojowej;
4. Zestaw do naświetlania składa się z lampy halogenowej reflektorowej (prosto-
kątna) z żarnikiem o mocy 400W. Czoło lampy należy umieścić na wysokości
2Wykonano płytkę w przedstawionej technologii pod kierunkiem i nadzorem Technika Elek-tronika z Uprawnieniami Mistrzowskimi

3.7. Płytka drukowana 51
około 45cm nad blatem, na którym umieszcza się materiał do naświetlenia.
Wypraktykowany czas naświetlenia wynosi około 50min. Stosowany jest mi-
nutnik fotograficzny.
5. Teraz wszystkie operacje należy wykonać w dobrze przyciemnionym pomiesz-
czeniu:
• ułożyć laminat na blacie warstwą światłoczułą w kierunku lampy oświe-
tlającej,
• położyć na laminacie (precyzyjnie) „klisze” w taki sposób, aby „toner”
był od strony warstwy światłoczułej (ogranicza to błąd paralaksy),
• „Kliszę” docisnąć cienką szybą (większa niż pole płytki).
6. Włączyć minutnik fotograficzny z określonym czasem naświetlania.
7. Gdy naświetlanie zakończy się, wychłodzić płytkę (10min.).
8. Przygotować roztwór do „wywoływania” warstwy światłoczułej. Rozpuścić
płaską małą łyżeczkę Wodorotlenku Sodowego (sprzedawany w sklepach AGD
jako „Krecik”, „Mr.Mysz”) w 1 litrze wody.
9. Przygotowany roztwór o temp. 20oC wlać do kuwety o powierzchni większej
niż płytka.
10. W przygotowanym roztworze zatopić płytkę i poruszając delikatnie za pomocą
pensety plastikowej czekać na „wywołanie” warstwy światłoczułej. Naświe-
tlone (niezakryte) powierzchnie ulegają rozmyciu.
11. Wypłukać i wysuszyć płytkę.
12. Wytrawić w roztworze chlorku żelazowego (stężenie optymalne — tak aby to
trwało około godziny w temp. 20oC).
13. Nawiercić otwory rozpoczynając od najmniejszej średnicy wiertła.
14. Zmyć pozostałą część lakieru światłoczułego.
15. Nanieść lakier — topnik (SK10 — ang. Protektor solder active) na stronę
miedzianą płytki i wysuszyć.
16. Wlutować elementy

3.8. Zasada działania układu 52
Rysunek 3.18: Fotografia PEdASK od strony mozaiki ścieżek
3.8 Zasada działania układu
3.8.1 Możliwe konfiguracje układu
Praca na stanowisku do badania własności silnika krokowego jest możliwa w czte-
rech konfiguracjach, których montaż zostanie opisany szczegółowo w dalszej części
tej pracy. Wymieniony jako pierwszy tryb pracy nie wymaga zastosowania płytki
PEdASK. Całość sterowania i pomiarów odbywa się w tym trybie zerowym (wyj-
ściowym) za pomocą urządzeń przemysłowych. Kolejne konfiguracje, to kombinacja
pracy płytki PEdASK z komputerem oraz urządzeniami przemysłowymi.
0 sterowanie z zadajnika (lub komputera — oprogramowanie firmowe WinSMC),
pomiary na licznikach LP100 i MD100;
1 sterowanie z zadajnika (oraz firmowego programu WinSMC), pomiar na licz-
nikach;
2 sterowanie z zadajnika (lub komputera — WinSMC), pomiar na komputerze;
3 sterowanie oraz pomiar przez oprogramowanie inżynierskie;

3.8. Zasada działania układu 53
3.8.2 Opis działania układu PEdASK
Rysunek 3.19: Fotografia płytki PEdASK
Począwszy od pracy na samych urządzeniach zewnętrznych, wszystkie sygnały
zostały przeniesione na płytkę drukowaną, umożliwiając ostatecznie przejście ze
sterowaniem i pomiarami na komputer.
Podczas pracy na urządzeniach przemysłowych — zadajniku ZD100 i licznikach
MD100 i LP100, możliwa jest zmiana mikrokroku dla SMC81RP za pomocą wygod-
nych ang. DIP-switch’y na płycie PEdASK, co ogranicza ryzyko uszkodzenia układu
przez użytkownika przy przedkładaniu zworek w sterowniku.
Przewidziany jest tryb ang. PC Host’a (gospodarza). Wówczas wszystkie sygnały
sterujące dla SMC81RP pochodzą z komputera (przez rejestr danych portu LPT).
W obu wypadkach — sterowania z programu WINSMC lub stworzonego pro-
gramu inżynierskiego, komputer ma możliwość pobierania sygnałów z przetwornika
obrotowo-impulsowego MOK40.
Gdy sterowanie przejmuje zadajnik ZD100, dostępna jest również analiza sygna-
łów pochodzących z enkodera (kanał A, kanał B) oraz sygnałów sterujących dla
sterownika SMC81RP (DIR, CLK).
Tryb PC Host umożliwia wygodną zmianę wszystkich trybów pracy sterownika
silnika krokowego SMC81RP z komputera, wszystkich możliwych sygnałów sterują-
cych
DIR — kierunek obrotu silnika,

3.8. Zasada działania układu 54
CLK — sygnał taktujący,
EN — sygnał zezwolenia,
STOP — sygnał blokowania
M1, M2, M3 — ustawienie kroku pracy silnika
oraz analizę sygnałów przychodzących z enkodera MOK40
kanał A, kanał B — przebiegi prostokątne, przesunięte w fazie,
kanał C — sygnał kontrolny.
Dla umożliwienia obserwacji, zostały wbudowane w układ diody LED dla wszyst-
kich sygnałów docierających do sterownika SMC81 oraz pobieranych z przetwornika
obrotowo-impulsowego MOK40. Jedną diodę świecącą (DS5) wykorzystano jako
wskaźnik rodzaju pracy PEdASK (PC/ZD100).
DS6 wskazuje żądanie obsługi przerwania IRQ, DS7 — przepełnienie IRQ, za-
znaczony jako ERR (gdy nastąpiły zmiany, a komputer jeszcze nie jest gotowy do
obsługi kolejnego przerwania). Przycisk S1 służy do ręcznego skasowania przepeł-
nienia, S2 do sprawdzenia układu, czy generuje IRQ poprawnie.
Dostępne są również przełączniki uzwojeń silnika krokowego — szeregowo, rów-
nolegle, po jednym uzwojeniu których szczegółowe działanie zostało przedstawione
na schemacie 3.13. Zainstalowane są również rezystory boczniki (0, 1Ω/2W) do
pomiarów prądu w uzwojeniach i prądu zasilania. Bezpieczny dostęp do boczni-
ków prądowych, pokazany na rys. 3.20, na uzwojeniach został wyprowadzony na
dwa gniazda G12 i G13, aby zmniejszyć ryzyko uszkodzenia sterownika przy zwarciu
dwóch faz. Dodatkowe informacje na ten temat zostaną opisane w rozdziale dotyczą-
cym zasad użytkowania płytki. Masa układu do pomiarów zastała wyprowadzona
Rysunek 3.20: Widok gniazd G12 i G13 płytki PEdASK
na metalową podpórkę w prawym dolnym rogu płytki PEdASK.
Jak już zostało wyżej wspomniane, możliwa jest praca w czterech konfiguracjach.
Pracę z płytką PEdASK można jednak ograniczyć do dwóch: z/bez komunikacji
z komputerem przez port LPT.

3.8. Zasada działania układu 55
Rysunek 3.21: Widok płytki PEdASK od strony gniazda DB25
Bez połączenia z komputerem
Płytka z odłączonym komputerem pracuje tylko jako listwa połączeniowa. Multi-
pleksery sygnałów są ustawione w pozycji sterowania z zadajnika ZD100. Umożliwia
to przeprowadzenie dotychczasowych ćwiczeń bez zmian, z wyjątkiem sygnałów ste-
rujących SMC81RP —M1,M2,M3, EN, STOP, które teraz znajdują się na płycie
jako DIP-switch’e.
Ponadto wygodnie wyeksponowano punkty pomiarowe sygnałów do badania
oscyloskopem.
Rysunek 3.22: Rozmieszczenie elementów na płytce drukowanej PEdASK

3.9. Montaż układu w poszczególnych konfiguracjach 56
W połączeniu z komputerem przez port LPT
Wszystkie sygnały dla sterownika SMC81RP pochodzą z rejestru danych portu
LPT. Dostarczane są do multiplekserów, a następnie do sterownika. Wolny bit
rejestru danych został wykorzystany do sterowania przełączaniem multiplekserów
w tryb pracy PC Host/ZD100.
Multiplekser pobierania sygnałów (U7) teraz pobiera sygnały z enkodera (kanał
A, B, C) i dostarcza je do rejestru zatrzaskowego (U4) gdzie dalej sygnał trafia do
złącza LPT.
Układ wyzwalania przerwania IRQ dla komputera został zbudowany w oparciu
o komparator danych (U6), rys. A.1. W dwóch portach tego układu (P i Q) porów-
nywane są dane 4-bitowe, przed rejestrem ’75 i po rejestrze ’75. Gdy dane różnią się,
komparator ’85 na wyjściu zgodności wystawia stan „0”. Ten sygnał podlega negacji
w bramce NAND (U3B) i steruje wpisem nowej aktualnej wartości do ’75. Kompa-
rator danych rozpoznaje ten stan rzeczy i wystawiając „1” powoduje zatrzaśnięcie
informacji w ’75. Zostanie w ten sposób wygenerowane zbocze narastające, które
w detektorze zbocza narastającego, steruje przerzutnikiem RS (układy U2A, U2B).
Pobrany sygnał po zanegowaniu dostarczany jest do LPT na pin 10-ty jako żąda-
nie obsługi przerwania sprzętowego. DiodaDS6 wskazuje ten stan. Sygnał powinien
zostać obsłużony, czyli porcja danych pobrana i w odpowiedzi wystawiona przez
port LPT na pinie 1-wszym sygnał ze zboczem narastającym jako potwierdzenie
gotowości do przyjęcia następnego przerwania. Tutaj też jest detektor zbocza na-
rastającego, który przełącza przerzutnik RS w stan oczekiwania na następną porcję
danych (czyli nowe przerwanie).
Na układzie ’74 zbudowano detektor przepełnienia IRQ. Jeżeli nastąpi następny
wpis danych do ’75 podczas przerwania, informacja zostanie dostarczona do kompu-
tera i zaświeci diodę DS7 ERR. W ten sposób można określić maksymalną częstotli-
wość pobierania danych bez przekłamań. Oczywiście prędkość ta jest już zależna od
podłączonego komputera, systemu operacyjnego i oprogramowania inżynierskiego.
3.9 Montaż układu w poszczególnych konfiguracjach
3.9.1 0 tryb pracy — praca wyłącznie na urządzaniach
przemysłowych
Aby było możliwe łatwe przełączanie układu do pozostałych konfiguracji, opra-
cowano i wykonano nowe okablowanie. Dzięki temu jednoznacznie oznaczono wtyki
i gniazda poszczególnych urządzeń. Nadano odpowiednie oznaczenia na schemacie
montażowym i przewodach.

3.9. Montaż układu w poszczególnych konfiguracjach 57
Opis działania
Rysunek 3.23: Fotografia stanowiska w 0 trybie pracy
W tej konfiguracji układu nie jest używana płytka PEdASK. Można przeprowa-
dzać ćwiczenia na tym stanowisku bez żadnych zmian.
Montaż
Sygnały sterujące z zadajnika ZD100 (2) wyprowadzić na złącze sterujące ste-
rownika silnika krokowego SMC81RP za pomocą zworek i końcówek oznaczonych
kolorami. Parę przewodów zielony z czarnym należy połączyć odpowiednio z pinem
2 i 1 — sygnał taktowania CLK. Parę przewodów czerwony z czarnym, załączyć od-
powiednio do pinu 6 i 5 — sygnał kierunku obortu silnika DIR. Pojedynczy czarny
przewód wyprowadzić na masę sterownika, czyli najlepiej na pin 15. Zezwolenie na
pracę sterownika ustawić przez zwarcie pinu 4 do masy — pin 3 (za pomocą zworki).
Mikrokrok obrotu silnika ustawić za pomocą zworek na parach pinów: 7, 8 – M1;
9, 10 – M2, 11, 12 – M3. Podział kroku jest opisany dokładnie w instrukcji do
sterownika SMC [27]. Sygnał STOP zostawić niepodłączony. Zwarcie go do masy
spowoduje blokowanie sygnału taktowania. Podczas ćwiczeń z wykorzystaniem pro-

3.9. Montaż układu w poszczególnych konfiguracjach 58
gramu WINSMC, należy jeszcze podłączyć kabel do 4 gniazda zadajnika i połączyć
z komputerem.
Sygnały wyjściowe ze sterownika oraz zasilanie zostanie doprowadzone przez
przejściówkąW8UA−W9UB podłączając odpowiednio wtykW9UB doW9U (ozna-
czony na schemacie) oraz W8UA do W8U wyprowadzonego bezpośrednio ze silnika
i zasilacza jako wspólne gniazdo.
Należy zwrócić szczególna uwagę na prawidłowe połączenie przewodów, ponieważ
przesunięcie o jedno miejsce może spowodować uszkodzenie układu. Kolory prze-
wodów dochodzących i wychodzących z punktów łączonych mają być takie same
3.25.
Ostatni przewód z czterema gniazdami DB9, należy połączyć liczniki oraz en-
koder. Wtyk W4A połączyć z W4U enkodera, W3A i W3B w dowolnej kolejności
z licznikami LP100 (1), i MD100 (1). W tej konfiguracji odgałęzienie W3C nie jest
wykorzystane.
Schemat połączeń
Schemat poszczególnych połączeń wraz ze szczegółowym opisem gniazd i kolorów
przedstawia rys. 3.24.
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
D D
C C
B B
A A
Title
Number RevisionSize
A3
Date: 2007-01-26 Sheet ofFile: W:\work_studia\..\uzwojenia_sil_ster.schdocDrawn By:
10mH
L4Inductor
10mH
L3Inductor
10mH
L2
Inductor10mH
L1
Inductor
M
12345678
W8 PB
Header 8 - F
123456 W9 U
Header 6 - F
123456
G9
OUT: ZN100 / IN: SMC81
0.1RR18
0.1RR19
0.1R
R20
1 23
G10 PWR2.5
12345678910
W8U
Header 10 - F
123456789
10
W8 UA
Header 10 - M
123456789
10
W8 PA
Header 10 - M
+32V
GND
123456
W9 UB Header 6 - M
PRZEJŚCIÓWKA (ZASILANIE + FAZY SILNIKA) ZN100L I 5BYG081D Z SMC81RP
BEZPOŚREDNIE POŁĄCZENIE STEROWNIKA DO SILNIKA
SMC81RP
123456
Header 6
PRZEWODY PODŁĄCZONE NA STAŁE Z GNIAZDEM 6-PINOWYM
PRZEJŚCIÓWKA DO PRACY Z PŁYTKĄ ( STEROWANIE Z PC LUB ZD100 )
ZASILACZ ZN100L
GND - NIEBIESKIVcc - CZERWONY
FAZA B/ - ZIELONYFAZA B - BRĄZOWYFAZA A/ - ZÓŁTYFAZA A - CZERWONY
A A/ B B/ GND Vcc
GND - CZAR+CZERWVcc - CZARNY
SILNIK KROKOWY 2-FAZOWY 57BYG 081D1.8 5V 1A 55N cm 5 OhmA CZERWONYA\ ŻÓŁTYA* NIEBIESKIA*\ CZARNYB BRĄZOWYB\ ZIELONYB* BIAŁYB*\ FIOLETOWY
ZASILACZ NIESTABILIZOWANY ZN 100L 2A/4A peak +36V DC
STEROWNIK SILNIKA KROKOWEGO SMC 81RP max 1,5A / faze +10...36V DC # 05-001087
A - CZERWONYA/ - ŻÓŁTYA* - NIEBIESKIA*/ - CZARNYB - BRĄZOWYB/ - ZIELONYB* - BIAŁYB*/ - FIOLETOWY
GND - NIEBIESKIVcc - CZERWONY
1
23
W10 PC
PWR2.5
A - CZERWONYA/ - ŻÓŁTYA* - NIEBIESKIA*/ - CZARNYB - BRĄZOWYB/ - ZIELONYB* - BIAŁYB*/ - CZAR+CZERW
A - CZERWONYA/ - ŻÓŁTY
B - BRĄZOWYB/ - ZIELONY
GND - NIEBIESKIVcc - CZERWONY
PRACA SILNIKA NA POJEDYNCZYM UZWOJENIU
1) PRACA Z PŁYTKĄ (P):-> WTYCZKA ŁĄCZONA DO PŁYTKI ( G9 )
2) PRACA BEZPOŚREDNIA (B):-> WTYCZKA ŁĄCZONA DO WTYKU PRZEJŚCIÓWKI ( W9 UB )
12345678
G8
OUT: 57 BYG 081
AA/A*A*/BB/B*B*/
K1
Relay-DPDT
K2
Relay-DPDT
K3
Relay-DPDTD1
Diode 1N4148
23
1
S9
SW-SPDTRÓWNOLEGLE UZW.
SZEREGOWO UZW.
Vcc +5V DC
D2
Diode 1N4148
23
1
S8
SW-SPDT
PO 1 UZW.
PO 2 UZW.
Anna Cieśnik
PEDASKSchemat połączeń uzwojeń silnika w pracy bezpośredniej lub z płytką
Header 8 - M
Header 6 - M
P0D101 P0D102 P0D201 P0D202
P0G801
P0G802
P0G803
P0G804
P0G805
P0G806
P0G807
P0G808
P0G901
P0G902
P0G903
P0G904
P0G905
P0G906
P0G1001
P0G1001A
P0G1001B
P0G1002
P0G1002A
P0G1002B
P0G1003
P0G1003A
P0G1003B
P0Header 601
P0Header 602
P0Header 603
P0Header 604
P0Header 605
P0Header 606
P0K101
P0K102
P0K103
P0K104
P0K105
P0K106
P0K107 P0K108
P0K201
P0K202
P0K203
P0K204
P0K205
P0K206
P0K207 P0K208
P0K301
P0K302
P0K303
P0K304
P0K305
P0K306
P0K307 P0K308
P0L101 P0L102 P0L201 P0L202
P0L301
P0L302
P0L401
P0L402
P0R1801
P0R1802
P0R1901
P0R1902
P0R2001 P0R2002
P0S801
P0S802
P0S803
P0S901
P0S902
P0S903
P0W8 PA01
P0W8 PA02
P0W8 PA03
P0W8 PA04
P0W8 PA05
P0W8 PA06
P0W8 PA07
P0W8 PA08
P0W8 PA09
P0W8 PA010
P0W8 PB01
P0W8 PB02
P0W8 PB03
P0W8 PB04
P0W8 PB05
P0W8 PB06
P0W8 PB07
P0W8 PB08
P0W8U01
P0W8U02
P0W8U03
P0W8U04
P0W8U05
P0W8U06
P0W8U07
P0W8U08
P0W8U09
P0W8U010
P0W8 UA01
P0W8 UA02
P0W8 UA03
P0W8 UA04
P0W8 UA05
P0W8 UA06
P0W8 UA07
P0W8 UA08
P0W8 UA09
P0W8 UA010
P0W9 U01
P0W9 U02
P0W9 U03
P0W9 U04
P0W9 U05
P0W9 U06
P0W9 UB01
P0W9 UB02
P0W9 UB03
P0W9 UB04
P0W9 UB05
P0W9 UB06
P0W10 PC01 P0W10 PC01A P0W10 PC01B
P0W10 PC02 P0W10 PC02A P0W10 PC02B
P0W10 PC03 P0W10 PC03A P0W10 PC03B
P0D101
P0K107
P0K207
P0S801
P0S901
P0D102 P0D202
P0K108
P0K208 P0K308
P0S802
P0S903
P0D201
P0K307
P0S902
P0G801
P0K203
P0R1801
P0A
P0G802
P0K202
P0K204
P0A/
P0G803
P0K201
P0A*
P0G804
P0G905
P0K304
P0A*/
P0G805
P0K301
P0R1901
P0B
P0G806
P0K102
P0K104
P0B/
P0G807
P0K101
P0B*
P0G808
P0G903
P0K106
P0B*/
P0G901
P0R2001
P0G902
P0G1002
P0G1002A
P0G1002B
P0G1003
P0G1003A
P0G1003B
P0G904
P0R1902
P0G906
P0R1802
P0G1001
P0G1001A
P0G1001B
P0R2002
P0K103
P0K302
P0K105
P0K205
P0K206
P0K305
P0K303
P0K306
P0L101
P0W8U010 P0B*/ 0 FIOLETOWY
P0L102
P0W8 PA09 P0W8 PB07 P0W8U09 P0B* 0 BIA£Y P0B* 0 BIA£Y
P0L201
P0W8 PA08 P0W8 PB06
P0W8 UA08
P0W8U08
P0W9 UB03
P0B/ 0 ZIELONY
P0B/ 0 ZIELONY
P0B/ 0 ZIELONY
P0L202 P0W8 PA07 P0W8 PB05
P0W8 UA07
P0W8U07
P0W9 UB04
P0B 0 BR¥ZOWY
P0B 0 BR¥ZOWY
P0B 0 BR¥ZOWY
P0L301
P0W8 PA06 P0W8 PB04 P0W8U06 P0A*/ 0 CZARNY P0A*/ 0 CZARNY
P0L302
P0W8 PA05 P0W8 PB03 P0W8U05 P0A* 0 NIEBIESKI P0A* 0 NIEBIESKI
P0L401
P0W8 PA04 P0W8 PB02
P0W8 UA04
P0W8U04
P0W9 UB05
P0A/ 0 ¯Ó£TY
P0A/ 0 ¯Ó£TY
P0A/ 0 ¯Ó£TY
P0L402
P0W8 PA03 P0W8 PB01
P0W8 UA03
P0W8U03
P0W9 UB06
P0A 0 CZERWONY
P0A 0 CZERWONY
P0A 0 CZERWONY
P0S803 P0VCC +5V DC
P0W8 PA01
P0W10 PC01 P0W10 PC01A P0W10 PC01B
P0VCC 0 CZARNY
P0W8 PA02
P0W10 PC02 P0W10 PC02A P0W10 PC02B
P0W10 PC03 P0W10 PC03A P0W10 PC03B
P0GND 0 CZAR+CZERW
P0W8 PA010 P0W8 PB08 P0B*/ 0 CZAR+CZERW
P0W8 UA05
P0W8 UA06
P0W8 UA09
P0W8 UA010
P0Header 601
P0W8 UA01
P0W8U01
P0W9 UB01
P0W9 U01
P0VCC 0 CZERWONY
P0VCC 0 CZERWONY
P0VCC 0 CZERWONY
P0Header 602
P0W8 UA02
P0W8U02
P0W9 UB02
P0W9 U02
P0GND 0 NIEBIESKI
P0GND 0 NIEBIESKI
P0GND 0 NIEBIESKI
P0Header 603
P0W9 U03
P0FAZA B/ 0 ZIELONY
P0Header 604
P0W9 U04
P0FAZA B 0 BR¥ZOWY
P0Header 605
P0W9 U05
P0FAZA A/ 0 ZÓ£TY
P0Header 606
P0W9 U06
P0FAZA A 0 CZERWONY
P0VCC 0 CZERWONY
P0GND 0 NIEBIESKI
P0FAZA B/ 0 ZIELONY
P0FAZA B 0 BR¥ZOWY
P0FAZA A/ 0 ZÓ£TY
P0FAZA A 0 CZERWONY
P0A
P0A/
P0A*
P0A*/
P0B
P0B/
P0B*
P0B*/
P0B*/ 0 FIOLETOWY
P0VCC +5V DC
P0VCC 0 CZARNY
P0GND 0 CZAR+CZERW
P0A 0 CZERWONY
P0A/ 0 ¯Ó£TY
P0A* 0 NIEBIESKI
P0A*/ 0 CZARNY
P0B 0 BR¥ZOWY
P0B/ 0 ZIELONY
P0B* 0 BIA£Y
P0B*/ 0 CZAR+CZERW
P0D101
P0K107
P0K207
P0S801
P0S901
P0D102 P0D202
P0K108
P0K208 P0K308
P0S802
P0S903
P0D201
P0K307
P0S902
P0G801
P0K203
P0R1801
P0A
P0G802
P0K202
P0K204
P0A/
P0G803
P0K201
P0A*
P0G804
P0G905
P0K304
P0A*/
P0G805
P0K301
P0R1901
P0B
P0G806
P0K102
P0K104
P0B/
P0G807
P0K101
P0B*
P0G808
P0G903
P0K106
P0B*/
P0G901
P0R2001
P0G902
P0G1002
P0G1002A
P0G1002B
P0G1003
P0G1003A
P0G1003B
P0G904
P0R1902
P0G906
P0R1802
P0G1001
P0G1001A
P0G1001B
P0R2002
P0K103
P0K302
P0K105
P0K205
P0K206
P0K305
P0K303
P0K306
P0L101
P0W8U010 P0B*/ 0 FIOLETOWY
P0L102
P0W8 PA09 P0W8 PB07 P0W8U09 P0B* 0 BIA£Y
P0L201
P0W8 PA08 P0W8 PB06
P0W8 UA08
P0W8U08
P0W9 UB03
P0B/ 0 ZIELONY
P0L202 P0W8 PA07 P0W8 PB05
P0W8 UA07
P0W8U07
P0W9 UB04
P0B 0 BR¥ZOWY
P0L301
P0W8 PA06 P0W8 PB04 P0W8U06 P0A*/ 0 CZARNY
P0L302
P0W8 PA05 P0W8 PB03 P0W8U05 P0A* 0 NIEBIESKI
P0L401
P0W8 PA04 P0W8 PB02
P0W8 UA04
P0W8U04
P0W9 UB05
P0A/ 0 ¯Ó£TY
P0L402
P0W8 PA03 P0W8 PB01
P0W8 UA03
P0W8U03
P0W9 UB06
P0A 0 CZERWONY
P0S803 P0VCC +5V DC
P0W8 PA01
P0W10 PC01 P0W10 PC01A P0W10 PC01B
P0VCC 0 CZARNY
P0W8 PA02
P0W10 PC02 P0W10 PC02A P0W10 PC02B
P0W10 PC03 P0W10 PC03A P0W10 PC03B
P0GND 0 CZAR+CZERW
P0W8 PA010 P0W8 PB08 P0B*/ 0 CZAR+CZERW
P0W8 UA05
P0W8 UA06
P0W8 UA09
P0W8 UA010
P0Header 601
P0W8 UA01
P0W8U01
P0W9 UB01
P0W9 U01
P0VCC 0 CZERWONY
P0Header 602
P0W8 UA02
P0W8U02
P0W9 UB02
P0W9 U02
P0GND 0 NIEBIESKI
P0Header 603
P0W9 U03
P0FAZA B/ 0 ZIELONY
P0Header 604
P0W9 U04
P0FAZA B 0 BR¥ZOWY
P0Header 605
P0W9 U05
P0FAZA A/ 0 ZÓ£TY
P0Header 606
P0W9 U06
P0FAZA A 0 CZERWONY
Rysunek 3.24: Schemat połączeń uzwojeń silnika do pracy w trybie 0

3.9. Montaż układu w poszczególnych konfiguracjach 59
Okablowanie
Dokładny opis sygnałów i przewodów wraz z zaznaczeniem kolorów znajduje się
na rys. 3.25.
3.9.2 1 tryb pracy — sterowanie z ZD100, pomiary na licznikach
Ta konfiguracja wykorzystuje płytkę edukacyjną jako listwę złączeniową. Wszyst-
kie sygnały zostają wyprowadzone na PEdASK. Zaletą tego układu jest możliwość
obserwacji sygnałów sterujących SMC81RP na diodach DS8 − DS15, m.in. sygnał
kierunku DIR i taktowania CLK pochodzące z zadajnika. Dodatkowo przełączanie
mikrokroku (M1 − M3) oraz zmiana stanu sygnału zezwolenia EN i STOP’u zo-
stała przeniesiona na wygodne przełączniki na płytce drukowanej. Dużym atutem
w stosunku do 0-wego trybu pracy jest przełączanie uzwojeń silnika, co wcześniej
nie było możliwe. Stosowne przełączniki znajdują się po prawej stronie PEdASK.
Wyprowadzenie kanałów A ,B i C z przetwornika obrotowo-impulsowego MOK40
steruje diodami DS7 − DS9 oznaczającymi stan logiczny tych sygnałów.
Montaż stanowiska
Gniazdo G4 połączyć z wtykiem W3C, natomiast pozostałe rozgałęzienia ka-
bla pozostawić jak w 0-wym trybie pracy — W4A z W4U, W3A z MD100 (1),
W3B z LP100 (1), przy czym ostanie dwa można połączyć zamiennie. Pod żad-
nym pozorem nie podłączać innego wtyku tego rozgałęzionego przewodu do płytki
poza wtykiemW3C, ponieważ spowoduje uszkodzenie elektorniki PEdASK. Sygnały
sterujące z zadajnika ZD100 (2) wyprowadzić na płytkę, przez podłączenie wtyku
W5A do złącza ZD100 (2) oraz W5B z G5 płytki drukowanej. Doprowadzić za-
silanie dla płytki zewnętrznym zasilaczem ZN9/300 do gniazda G7. G8 połączyć
z W8PB, drugi koniec W8PA z W8U — wyprowadzonymi uzwojeniami silnika. Ko-
lory przewodów po obu stronach złącza powinny się zgadzać. Zasilanie z ZN100L
wprowadzić do układu przez podłączenieW10PC z G10. Przypadkowa zamiana obu
zasilań nie spowoduje uszkodzenia, ponieważ przekrój złącza PWR został dobrany
w ten sposób, aby nie było możliwe załączenie wyższego napięcia na płytkę niż do-
puszczalne. Gniazdo G9 wprowadza sygnały sterowania fazami silnika przez wtyk
W9U. Natomiast sterowania do SMC81RP należy doprowadzić przez taśmę, zwra-
cając szczególną uwagę na oznaczenia pierwszego pinu na płytce (czarną kropką) —
W11A do gniazda G11, a drugi koniec taśmy W11B do złącza sterującego sterow-
nika silnika krokowego, po uprzednim wyciągnięciu ewentualnych zworek. Listwa
zaciskowa powinna w obu przypadkach kierować taśmę na zewnątrz urządzenia.
Szczegółowy opis pinów znajduje się na rys. 3.26.

3.9. Montaż układu w poszczególnych konfiguracjach 60
Okablowanie
Do montażu należy wykorzystać okablowanie z rys. 3.26.
3.9.3 2 tryb pracy — jednoczesne wykorzystanie komputera
i urządzeń do sterowania/pomiarów
Do tego trybu pracy należy podłączyć jeszcze jeden przewód do łącza LPT kom-
putera. Zasadniczo tą konfigurację można podzielić na dwa przypadki: sterowanie
z komputera za pomocą portu LPT i oprogramowania inżynierskiego, przy pomia-
rach prowadzonych na licznikach. Wystarczy wówczas tylko połączyć G1 z PC,
reszta połączeń pozostawić jak w 1-wszym trybie pracy. Drugi przypadek polega
na sterowaniu z zadajnika i dokonywaniu pomiarów na komputerze, przy czym nie
jest konieczne odłączanie przewodów z zadajnika. Ogólny schemat połączeń został
przedstawiony na rys. 3.27.
Montaż stanowiska
Dodatkowo w stosunku do trybu drugiego należy połączyć gniazdo G1 z wtykiem
W1A, natomiast drugi koniec W1B z portem LPT komputera.
Okablowanie
Do montażu należy wykorzystać okablowanie z rys. 3.26.
3.9.4 3 tryb pracy — sterowanie i pomiar na komputerze
Montaż stanowiska
Montaż układu w tej konfiguracji jest analogiczny do poprzedniego trybu pracy,
za wyjątkiem połączenia z zadajnikiem, które jest całkowicie zbędne oraz połącze-
niem enkoder – PEdASK, gdzie należy bezpośrednio połączyć wtyk W4U z gniaz-
dem G4. Przetwornik obrotowo-impulsowy jest teraz zasilany z płytki. Kompletny
opis wszystkich połączeń do pracy w tej konfiguracji, stanowiącej ostateczną wersję
nowego stanowiska został przedstawiony na schemacie montażowym (rys.3.28).
Okablowanie
Do montażu należy wykorzystać okablowanie z rys. 3.26.

3.10. Zbudowane stanowisko do badania własności silnika krokowego 61
3.10 Zbudowane stanowisko do badania własności silnika
krokowego
Fotografia w pełni funkcjonalnego stanowiska w ostatecznym połączeniu zamiesz-
czono na rys. 3.29 Konfiguracja połączeń jest zgodna z opisem z rozdziału 3.9.4 oraz
schematem montażowym 3.28.
Rysunek 3.29: Fotografia zbudowanego stanowiska do badania własności silnika
krokowego
3.11 Pomiary i ograniczenia
Zbadano sygnał taktujący CLK generowany przez zadajnik ZD100 na wejściu
sterownika silnika krokowego SMC81RP. Ma on przebieg typowo impulsowy (rys.
3.30), natomiast ten sam sygnał na wejściu portu LPT, po odfiltrowaniu wysokich
częstotliwości przez układ PEdASK ma o wiele ładniejszy, wygładzony przebieg
z wyraźnym stanem logicznym na poziomie 0V (rys. 3.30). Niestety impulsy te
trwają zbyt krótko, aby odczytać je na komputerze z aktualnym systemem.
Sterowanie impulsowe okazuje się bardzo dobrze sprawdzać, zwłaszcza przy du-
żych częstotliwościach.
Sygnał taktujący generowany przez komputer (oprogramowanie inżynierskie) ma
przebieg prostokątny o zmiennym czasie wypełnienia, ściśle zależnym od obciążenia
systemu innymi zadaniami. Błędy w opóźnieniach sygnałów oraz nawet ich chwilowy

3.11. Pomiary i ograniczenia 62
zanik może powodować drgania silnika, którego praca jest uzależniona od sygnałów
sterujących i bezwładności przy niezerowej masie silnika, które można zaniedbać
przy odpowiednim sterowaniu.
Rysunek 3.30: Pomiar sygnału sterującego CLK pomiędzy zadajnikiem a ste-
rownikiem SMC81RP
Rysunek 3.31: Pomiar sygnału sterującego CLK na wejściu portu LPT
Natomiast analiza stanów logicznych na porcie LPT w czasie trwania pracy
układu sterowanego z zadajnika umieszczono poniżej (rys. 3.32). Jednoznacznie wi-
dać przebieg sygnałów z obu kanałów pochodzących z enkodera MOK40. W ostat-
nim wierszu tego wykresu sygnał umieszczono przebieg obsługi przerwania. Czas
obsługi przyjęcia pojedynczej porcji danych jest wyznaczony czasem trwania stanu
„L”.

3.12. Zalecenia użytkowania układu 63
Rysunek 3.32: Pomiar sygnałów w monitorze portu LPT
Wyznaczanie przebytej drogi i położenia silnika opiera się zliczaniu impulsów,
a kierunek obrotu jest wyznaczony przez przesunięcie fazowe tych dwóch kanałów
pochodzących z przetwornik obrotowo-impulsowego (rys. 3.33).
Rysunek 3.33: Zmiana kierunku obrotu silnika
3.12 Zalecenia użytkowania układu
Do zezwolenia pracy sterownika SMC81RP należy ustawić przełączniki STOP
w stan logiczny „1”, natomiast ENABLE „0”, zgodnie z zaleceniami w dokumentacji
sterownika silnika krokowego [27].
Przed przystąpieniem do pomiarów należy podpiąć sondę lub specjalne „żabki”,
ustawić maksymalny zakres pomiarów na przyrządzie pomiarowym dopiero wtedy
załączy zasilanie do układu i poszukiwać odpowiednich ustawień.

3.13. Wnioski 64
Przy dokonywaniu pomiarów na bocznikach prądowych R19 i R20 oscyloskopem,
należy zwrócić szczególną uwagę, aby nie zewrzeć tych dwóch sygnałów. W celu
zabezpieczenia układu przed takimi ewentualnościami, wyprowadzono odpowiednie
potencjały na gniazda pomiarowe G12 i G13.
W żadnym przypadku nie wolno załączać dwóch kanałów jednoczenie do jednego
oscyloskopu, ponieważ grozi to uszkodzeniem sterownika. Jest to związane z typową
budową oscyloskopów, bez separacji galwanicznej kanałów. Pomiary te można wy-
konywać tylko na wyraźne polecenie prowadzącego. Do przeprowadzania pomiaru
na jednym oscyloskopie należy wykorzystać specjalne sondy pomiarowe, które ze
względu na specyfikę nie są jeszcze zawarte w zestawie tego stanowiska.
3.13 Wnioski
Układ PEdASK został zaprojektowany jako uniwersalny układ do pracy w wielu
konfiguracjach na tym stanowisku. Jego zasada działania jest względnie prosta,
a wykonanie stosowne do charakteru pracy. Dużym atutem tego układu było wy-
korzystanie w kolejnych etapach powstawania projektu.
W dalszej części rozwijania zagadnienia sterowania silnikami krokowymi nale-
żałoby się jednak skupić na miniaturyzacji układu, zapewnia sprzętowego wspo-
magania przy sterowaniu (pamięć układu). Idąc w drugim kierunku – pomiarów,
wskazane jest wykorzystanie zegara i pamięci zewnętrznej, aby czas zmiany sygna-
łów i ich stan był zapisany niezależnie od obciążenia systemu operacyjnego. Wy-
korzystanie układów FPGA do w.w. celów jest możliwe i umożliwia uniezależnienie
dokonywania zmian w budowie samej płytki drukowanej od wprowadzania kolejnych
udoskonaleń i funkcji pomiędzy stałą liczbą połączonych portów we/wy.

3.13. Wnioski 65
1
1
2
2
3
3
4
4
H H
G G
F F
E E
D D
C C
B B
A A
Title
Number RevisionSize
A3
Date: 2007-01-26 Sheet ofFile: W:\work_studia\..\kabelki_bez_plytki.schdocDrawn By:
1
2
3
4
5
6
7
8
9
11
10
G2
DB9 - M
1
SMC81 IN
CLK
GND
1 ENDIRM1M2M3STOPGND
M1, M2, M3 - ustawianie mikrokroku,ENABLE zwarte do masy - zezwolenie na pracę sterownika,
Bez płytki PEDASK niezbędne są zworki.Przy podłączeniu płytki należy zdjąć wszystkie zworki z M1, M2, M3 oraz ENABLE i nałożyć taśmę.
1
2
3
4
5
6
7
8
9
11
10
ZD100 (2)
DB9 - F
CLKCLK/ (GND)
DIRDIR/ (GND)
GND EMITER OUT(3-6)
PORTY WYJŚCIOWE OPTOIZOLOWANE
KOLEKTOR OUT3KOLEKTOR OUT4KOLEKTOR OUT5
KOLEKTOR OUT6
CLK - ZIELONYCLK/ (GND) - CZARNY
DIR - CZERWONYDIR/ (GND) - CZARNY
GND - CZARNY
256
15
16
ZD100 ZłĄCZE WYJŚCIOWE STERUJĄCE
SILNIK KROKOWY 57BYG081
12345678910
W8U
Header 10 - F
A - CZERWONYA/ - ŻÓŁTYA* - NIEBIESKIA*/ - CZARNYB - BRĄZOWYB/ - ZIELONYB* - BIAŁYB*/ - FIOLETOWY
GND - NIEBIESKIVcc - CZERWONY
123456
W9 UB
Header 6 - M
GND - NIEBIESKIVcc - CZERWONY
A - CZERWONYA/ - ŻÓŁTY
B - BRĄZOWYB/ - ZIELONY Zasil.SMC81 GND
Zasil.SMC81 32V +
Faza - AFaza - A/Faza - BFaza - B/
123456
W9U
SMC 81
123456789
10
W8 UA
Header 10 - M
1
2
3
4
5
6
7
8
9
11
10
W3 A
DB9 - M
1
2
3
4
5
6
7
8
9
11
10
W4 A
DB9 - M
1
2
3
4
5
6
7
8
9
11
10
W3 B
DB - M
1
2
3
4
5
6
7
8
9
11
10
W4 U
DB9 - F
1
2
3
4
5
6
7
8
9
11
10
LP100 (1)
DB9 - F
1
2
3
4
5
6
7
8
9
11
10
MD100 (1)
DB9 - F
ENKODER MOK40
LP100
MD100
Vcc - BRĄZOWY
KANAŁ B - BIAŁY
KANAŁ A - CZARNY
GND - NIEBIESKI
KANAŁ C - POMAR.
KANAŁ - A
KANAŁ - B
GND
Vcc +12V
KANAŁ - C
1
2
3
4
5
6
7
8
9
11
10
W3 C
DB9 - F
SZARY
ZIELONY
CZERWONY
ŻÓŁTY
BIAŁY
SZARY
ZIELONY
CZERWONY
ŻÓŁTY
KANAŁ - A
KANAŁ - B
GND
Vcc +12V
KANAŁ - C
Przy połączeniu bezpośrednim urządzeń, należy podłączyć przewody jak na schemacie.
Należy zwrócić uwagę na przewód z czterema gniazdami DB9.Przy pracy układu bez płytki PEDASK, jeden przewód (najdłuższy) pozostaje niepodłączony - W3 C.
Zamienienie wtyków W3 A, W3 B nie ma znaczenia.Zasilanie do enkodera MOK jest doprowadzone z liczników przez wtyk W4 A.
SMC81 ZŁĄCZE WYJŚCIOWE, ZASILANIA
ZŁĄCZE - TAŚMA DO SMC81
URZĄDZENIA URZĄDZENIAPRZEWODY
Anna Cieśnik
Przewody i połączenia do pracy bezpośredniej
Header 6 - F
P0G201
P0G202
P0G203
P0G204
P0G205
P0G206
P0G207
P0G208
P0G209
P0G2010
P0G2011
P0LP100 (1)01
P0LP100 (1)02
P0LP100 (1)03
P0LP100 (1)04
P0LP100 (1)05
P0LP100 (1)06
P0LP100 (1)07
P0LP100 (1)08
P0LP100 (1)09
P0LP100 (1)010
P0LP100 (1)011
P0MD100 (1)01
P0MD100 (1)02
P0MD100 (1)03
P0MD100 (1)04
P0MD100 (1)05
P0MD100 (1)06
P0MD100 (1)07
P0MD100 (1)08
P0MD100 (1)09
P0MD100 (1)010
P0MD100 (1)011
P0W3 A01
P0W3 A02
P0W3 A03
P0W3 A04
P0W3 A05
P0W3 A06
P0W3 A07
P0W3 A08
P0W3 A09
P0W3 A010
P0W3 A011
P0W3 B01
P0W3 B02
P0W3 B03
P0W3 B04
P0W3 B05
P0W3 B06
P0W3 B07
P0W3 B08
P0W3 B09
P0W3 B010
P0W3 B011
P0W3 C01
P0W3 C02
P0W3 C03
P0W3 C04
P0W3 C05
P0W3 C06
P0W3 C07
P0W3 C08
P0W3 C09
P0W3 C010
P0W3 C011
P0W4 A01
P0W4 A02
P0W4 A03
P0W4 A04
P0W4 A05
P0W4 A06
P0W4 A07
P0W4 A08
P0W4 A09
P0W4 A010
P0W4 A011
P0W4 U01
P0W4 U02
P0W4 U03
P0W4 U04
P0W4 U05
P0W4 U06
P0W4 U07
P0W4 U08
P0W4 U09
P0W4 U010
P0W4 U011
P0W8U01
P0W8U02
P0W8U03
P0W8U04
P0W8U05
P0W8U06
P0W8U07
P0W8U08
P0W8U09
P0W8U010
P0W8 UA01
P0W8 UA02
P0W8 UA03
P0W8 UA04
P0W8 UA05
P0W8 UA06
P0W8 UA07
P0W8 UA08
P0W8 UA09
P0W8 UA010
P0W9U01
P0W9U02
P0W9U03
P0W9U04
P0W9U05
P0W9U06
P0W9 UB01
P0W9 UB02
P0W9 UB03
P0W9 UB04
P0W9 UB05
P0W9 UB06
P0ZD100 (2)01
P0ZD100 (2)02
P0ZD100 (2)03
P0ZD100 (2)04
P0ZD100 (2)05
P0ZD100 (2)06
P0ZD100 (2)07
P0ZD100 (2)08
P0ZD100 (2)09
P0ZD100 (2)010
P0ZD100 (2)011
P0LP100 (1)05
P0MD100 (1)05
N0GND
P0GND
P0GND
P0GND
P0STOP
P0G201
P0DIR 0 CZERWONY
P0G202
P0CLK 0 ZIELONY
P0G203
P0G204
P0G205
P0G206
P0DIR/ (GND) 0 CZARNY
P0G207
P0CLK/ (GND) 0 CZARNY
P0G208
P0G209
P0GND 0 CZARNY
P0G2010
P0G2011
P0LP100 (1)01
P0MD100 (1)01
P0VCC +12V
P0VCC +12V
P0LP100 (1)02
P0MD100 (1)02
P0KANA£ 0 C
P0KANA£ 0 C
P0LP100 (1)03
P0MD100 (1)03
P0KANA£ 0 A
P0KANA£ 0 A
P0LP100 (1)04
P0MD100 (1)04
P0KANA£ 0 B
P0KANA£ 0 B
P0LP100 (1)06
P0LP100 (1)07
P0LP100 (1)08
P0LP100 (1)09
P0LP100 (1)010
P0LP100 (1)011
P0MD100 (1)06
P0MD100 (1)07
P0MD100 (1)08
P0MD100 (1)09
P0MD100 (1)010
P0MD100 (1)011
P0W3 A01
P0W3 B01
P0W4 A01
P0BIA£Y
P0W3 A02
P0W3 B02
P0W3 C02 P0W4 A02
P0SZARY
P0SZARY
P0W3 A03
P0W3 B03
P0W3 C03 P0W4 A03
P0¯Ó£TY
P0¯Ó£TY
P0W3 A04
P0W3 B04
P0W3 C04 P0W4 A04
P0CZERWONY
P0CZERWONY
P0W3 A05
P0W3 B05
P0W3 C05 P0W4 A05
P0ZIELONY
P0ZIELONY
P0W3 A06
P0W3 A07
P0W3 A08
P0W3 A09
P0W3 A010
P0W3 A011
P0W3 B010
P0W3 B011
P0W4 A010
P0W4 A011
P0W3 B06
P0W3 B07
P0W3 B08
P0W3 B09
P0W3 C01
P0W3 C06
P0W3 C07
P0W3 C08
P0W3 C09
P0W3 C010
P0W3 C011
P0W4 A06
P0W4 A07
P0W4 A08
P0W4 A09
P0W4 U01 P0VCC 0 BR¥ZOWY
P0W4 U02 P0KANA£ C 0 POMAR0
P0W4 U03 P0KANA£ A 0 CZARNY
P0W4 U04 P0KANA£ B 0 BIA£Y
P0W4 U05 P0GND 0 NIEBIESKI
P0W4 U06
P0W4 U07
P0W4 U08
P0W4 U09
P0W4 U010
P0W4 U011
P0W8 UA01
P0W9 UB01
P0VCC 0 CZERWONY
P0W8 UA05
P0W8 UA06
P0W8 UA09
P0W8 UA010
P0W8U01 P0VCC 0 CZERWONY
P0W8 UA02 P0W8U02
P0W9 UB02
P0GND 0 NIEBIESKI P0GND 0 NIEBIESKI
P0W8 UA03 P0W8U03
P0W9 UB06
P0A 0 CZERWONY P0A 0 CZERWONY
P0W8 UA04 P0W8U04
P0W9 UB05
P0A/ 0 ¯Ó£TY P0A/ 0 ¯Ó£TY
P0W8U05 P0A* 0 NIEBIESKI
P0W8U06 P0A*/ 0 CZARNY
P0W8 UA07 P0W8U07
P0W9 UB04
P0B 0 BR¥ZOWY P0B 0 BR¥ZOWY
P0W8 UA08 P0W8U08
P0W9 UB03
P0B/ 0 ZIELONY P0B/ 0 ZIELONY
P0W8U09 P0B* 0 BIA£Y
P0W8U010 P0B*/ 0 FIOLETOWY
P0W9U01 P0ZASIL0SMC81 32V +
P0W9U02 P0ZASIL0SMC81 GND
P0W9U03 P0FAZA 0 B/
P0W9U04 P0FAZA 0 B
P0W9U05 P0FAZA 0 A/
P0W9U06 P0FAZA 0 A
P0ZD100 (2)01 P0DIR/ (GND)
P0ZD100 (2)02 P0CLK
P0CLK
P0ZD100 (2)03 P0KOLEKTOR OUT3
P0ZD100 (2)04 P0KOLEKTOR OUT5
P0ZD100 (2)05 P0KOLEKTOR OUT6
P0ZD100 (2)06 P0DIR
P0DIR P0ZD100 (2)07 P0CLK/ (GND)
P0ZD100 (2)08 P0KOLEKTOR OUT4
P0ZD100 (2)09 P0GND EMITER OUT(306)
P0ZD100 (2)010
P0ZD100 (2)011
P0GND
P0STOP
P0DIR
P0CLK
P0DIR 0 CZERWONY
P0CLK 0 ZIELONY
P0DIR/ (GND) 0 CZARNY
P0CLK/ (GND) 0 CZARNY
P0GND 0 CZARNY
P0VCC +12V
P0KANA£ 0 C
P0KANA£ 0 A
P0KANA£ 0 B
P0BIA£Y
P0SZARY
P0¯Ó£TY
P0CZERWONY
P0ZIELONY
P0VCC 0 BR¥ZOWY
P0KANA£ C 0 POMAR0
P0KANA£ A 0 CZARNY
P0KANA£ B 0 BIA£Y
P0GND 0 NIEBIESKI
P0VCC 0 CZERWONY
P0A* 0 NIEBIESKI
P0A*/ 0 CZARNY
P0B* 0 BIA£Y
P0B*/ 0 FIOLETOWY
P0VCC 0 CZERWONY
P0GND 0 NIEBIESKI
P0A 0 CZERWONY
P0A/ 0 ¯Ó£TY
P0B 0 BR¥ZOWY
P0B/ 0 ZIELONY
P0ZASIL0SMC81 32V +
P0ZASIL0SMC81 GND
P0FAZA 0 B/
P0FAZA 0 B
P0FAZA 0 A/
P0FAZA 0 A
P0DIR/ (GND)
P0KOLEKTOR OUT3
P0KOLEKTOR OUT5
P0KOLEKTOR OUT6
P0CLK/ (GND)
P0KOLEKTOR OUT4
P0GND EMITER OUT(306)
N0GND
P0LP100 (1)05
P0MD100 (1)05
P0GND
P0STOP
P0G201
P0DIR 0 CZERWONY
P0G202
P0CLK 0 ZIELONY
P0G203
P0G204
P0G205
P0G206
P0DIR/ (GND) 0 CZARNY
P0G207
P0CLK/ (GND) 0 CZARNY
P0G208
P0G209
P0GND 0 CZARNY
P0G2010
P0G2011
P0LP100 (1)01
P0MD100 (1)01
P0VCC +12V
P0LP100 (1)02
P0MD100 (1)02
P0KANA£ 0 C
P0LP100 (1)03
P0MD100 (1)03
P0KANA£ 0 A
P0LP100 (1)04
P0MD100 (1)04
P0KANA£ 0 B
P0LP100 (1)06
P0LP100 (1)07
P0LP100 (1)08
P0LP100 (1)09
P0LP100 (1)010
P0LP100 (1)011
P0MD100 (1)06
P0MD100 (1)07
P0MD100 (1)08
P0MD100 (1)09
P0MD100 (1)010
P0MD100 (1)011
P0W3 A01
P0W3 B01
P0W4 A01
P0BIA£Y
P0W3 A02
P0W3 B02
P0W3 C02 P0W4 A02
P0SZARY
P0W3 A03
P0W3 B03
P0W3 C03 P0W4 A03
P0¯Ó£TY
P0W3 A04
P0W3 B04
P0W3 C04 P0W4 A04
P0CZERWONY
P0W3 A05
P0W3 B05
P0W3 C05 P0W4 A05
P0ZIELONY
P0W3 A06
P0W3 A07
P0W3 A08
P0W3 A09
P0W3 A010
P0W3 A011
P0W3 B010
P0W3 B011
P0W4 A010
P0W4 A011
P0W3 B06
P0W3 B07
P0W3 B08
P0W3 B09
P0W3 C01
P0W3 C06
P0W3 C07
P0W3 C08
P0W3 C09
P0W3 C010
P0W3 C011
P0W4 A06
P0W4 A07
P0W4 A08
P0W4 A09
P0W4 U01 P0VCC 0 BR¥ZOWY
P0W4 U02 P0KANA£ C 0 POMAR0
P0W4 U03 P0KANA£ A 0 CZARNY
P0W4 U04 P0KANA£ B 0 BIA£Y
P0W4 U05 P0GND 0 NIEBIESKI
P0W4 U06
P0W4 U07
P0W4 U08
P0W4 U09
P0W4 U010
P0W4 U011
P0W8 UA01
P0W9 UB01
P0VCC 0 CZERWONY
P0W8 UA05
P0W8 UA06
P0W8 UA09
P0W8 UA010
P0W8U01 P0VCC 0 CZERWONY
P0W8 UA02 P0W8U02
P0W9 UB02
P0GND 0 NIEBIESKI
P0W8 UA03 P0W8U03
P0W9 UB06
P0A 0 CZERWONY
P0W8 UA04 P0W8U04
P0W9 UB05
P0A/ 0 ¯Ó£TY
P0W8U05 P0A* 0 NIEBIESKI
P0W8U06 P0A*/ 0 CZARNY
P0W8 UA07 P0W8U07
P0W9 UB04
P0B 0 BR¥ZOWY
P0W8 UA08 P0W8U08
P0W9 UB03
P0B/ 0 ZIELONY
P0W8U09 P0B* 0 BIA£Y
P0W8U010 P0B*/ 0 FIOLETOWY
P0W9U01 P0ZASIL0SMC81 32V +
P0W9U02 P0ZASIL0SMC81 GND
P0W9U03 P0FAZA 0 B/
P0W9U04 P0FAZA 0 B
P0W9U05 P0FAZA 0 A/
P0W9U06 P0FAZA 0 A
P0ZD100 (2)01 P0DIR/ (GND)
P0ZD100 (2)02 P0CLK
P0ZD100 (2)03 P0KOLEKTOR OUT3
P0ZD100 (2)04 P0KOLEKTOR OUT5
P0ZD100 (2)05 P0KOLEKTOR OUT6
P0ZD100 (2)06 P0DIR
P0ZD100 (2)07 P0CLK/ (GND)
P0ZD100 (2)08 P0KOLEKTOR OUT4
P0ZD100 (2)09 P0GND EMITER OUT(306)
P0ZD100 (2)010
P0ZD100 (2)011
Rysunek 3.25: Opis przewodów do montażu stanowiska w 0 trybie pracy

3.13. Wnioski 66
1
1
2
2
3
3
4
4
H H
G G
F F
E E
D D
C C
B B
A A
Title
Number RevisionSize
A3
Date: 2007-01-10 Sheet ofFile: W:\work_studia\..\kabelki_z_plytka.schdoc Drawn By:
1
20
2
21
3
22
4
23
5
24
6
25
7
8
9
10
11
12
13
14
15
16
17
18
19
27
26
W1 B
DHP8 - 25 F
1
20
2
21
3
22
4
23
5
24
6
25
7
8
9
10
11
12
13
14
15
16
17
18
19
27
26
W1A
DHP8 - 25 M
1
20
2
21
3
22
4
23
5
24
6
25
7
8
9
10
11
12
13
14
15
16
17
18
19
27
26
DHP8 - 25 F
PC - LPT
SILNIK KROKOWY 57BYG081
SMC81 ZŁĄCZE WYJŚCIOWE, ZASILANIA
21436587
109121114131615
Header 8X2 - M
CLKENDIRM1M2M3STOP
SMC81 GNIAZDO WEJŚCIOWE ZŁĄCZE - TAŚMA DO SMC81
PEDASK
12345678910
W8U
Header 10 - F
A - CZERWONYA/ - ŻÓŁTYA* - NIEBIESKIA*/ - CZARNYB - BRĄZOWYB/ - ZIELONYB* - BIAŁYB*/ - FIOLETOWY
GND - NIEBIESKIVcc - CZERWONY
12345678
G8
OUT: 57 BYG 081
AA/A*A*/BB/B*B*/
/DIR
/CLK2 14 36 58 710 912 1114 1316 15
Header 8X2 - M
CLKENDIRM1M2M3STOP
/DIR
/CLK
21436587
109121114131615
Header 8X2 - F
2 14 36 58 710 912 1114 1316 15
Header 8X2 - F
12345678
W8 PB
Header 8 - F
123456789
10
W8 PA
Header 10 - M
GND - CZAR+CZERWVcc - CZARNY
A - CZERWONYA/ - ŻÓŁTYA* - NIEBIESKIA*/ - CZARNYB - BRĄZOWYB/ - ZIELONYB* - BIAŁYB*/ - CZAR+CZERW
1
23
W10 PC
PWR2.51
23
G10
PWR2.5
Zasil.SMC81 GNDZasil.SMC81 32V +
Faza - AFaza - A/Faza - BFaza - B/
123456
G9
IN: SMC 81
123456
W9U
SMC 81
Zasil.SMC81 GNDZasil.SMC81 32V +
Faza - AFaza - A/Faza - BFaza - B/
1
20
2
21
3
22
4
23
5
24
6
25
7
8
9
10
11
12
13
14
15
16
17
18
19
27
26
G1
LPT - PC
A/B >
CLK > SMC81
DIR > SMC81
EN > SMC81
STOP > SMC81
M1 > SMC81
M2 > SMC81
M3 > SMC81
IRQ <
IRQ CLR >
B < MOK40
DIR/ TEST IRQ <
A < MOK40
CLK < ZD100/PC
OVR <
OVR CLR >
DHP8 - 25 M
Vcc +32VGND
1
2
3
4
5
6
7
8
9
11
10
ZD100 (2)
DB9 - F
ZD100 ZłĄCZE WYJŚCIOWE STERUJĄCE
CLKCLK/ (GND)
DIRDIR/ (GND)
GND EMITER OUT(3-6)
PORTY WYJŚCIOWE OPTOIZOLOWANE
KOLEKTOR OUT3KOLEKTOR OUT4KOLEKTOR OUT5
KOLEKTOR OUT6
1
2
3
4
5
6
7
8
9
11
10
G5
ZD 100 (2)
1
2
3
4
5
6
7
8
9
11
10
W5 A
DB9 - M
1
2
3
4
5
6
7
8
9
11
10
W5 B
DB9 - F
CLKCLK/ (GND)
DIRDIR/ (GND)
GND
DB9 - M
SZARY
ZIELONYCZERWONY
ŻÓŁTY
BIAŁY
1
2
3
4
5
6
7
8
9
11
10
W3 A
DB9 - M
1
2
3
4
5
6
7
8
9
11
10
W4 A
DB9 - M
1
2
3
4
5
6
7
8
9
11
10
W3 B
DB - M
1
2
3
4
5
6
7
8
9
11
10
W4 U
DB9 - F
1
2
3
4
5
6
7
8
9
11
10
LP100 (1)
DB9 - F
1
2
3
4
5
6
7
8
9
11
10
MD100 (1)
DB9 - F
ENKODER MOK40
LP100
MD100
Vcc - BRĄZOWY
KANAŁ B - BIAŁY
KANAŁ A - CZARNY
GND - NIEBIESKI
KANAŁ C - POMAR.
KANAŁ - A
KANAŁ - B
GND
Vcc +12V
KANAŁ - C
1
2
3
4
5
6
7
8
9
11
10
W3 C
DB9 - F
SZARY
ZIELONY
CZERWONY
ŻÓŁTY
BIAŁY
SZARY
ZIELONY
CZERWONY
ŻÓŁTY
1
2
3
4
5
6
7
8
9
11
10
G3
LP 100/MD 100OUT: A B C GND
KANAŁ - A
KANAŁ - B
GND
Vcc +12V
KANAŁ - C
KANAŁ - A
KANAŁ - B
GND
KANAŁ - C
1
2
3
4
5
6
7
8
9
11
10
G4
MOK 40IN: A B C, OUT: Vcc GND
KANAŁ - A
KANAŁ - B
GND
Vcc +12V
KANAŁ - C
1
2
3
4
5
6
7
8
9
11
10
G2
LP 100/MD 100OUT: A B GND
KANAŁ - A
KANAŁ - B
GND
Po lewej stronie schematu zaznaczono złącza urządzeń, po prawej stronie, gniazda w płytce PEDASK.
Zaleca się stosować bezpośrednie połączenie enkodera MOK40 z płytką PEDASK:- wtyk W4U do gniazda G4, bez korzystania z dodatkowego okablowania- liczniki LP100 i MD100 nie są wówczas wykorzystywane- enkoder w takim połączeniu zasialny jest z płytki.
PRZEWODYURZĄDZENIA
Anna Cieśnik
Przewody i połączenia do pracy z płytką PEDASK
Header 8 - M
Header 6 - MHeader 6 - F
G11
W11 BW11 A
P0DHP8 0 25 F01
P0DHP8 0 25 F02
P0DHP8 0 25 F03
P0DHP8 0 25 F04
P0DHP8 0 25 F05
P0DHP8 0 25 F06
P0DHP8 0 25 F07
P0DHP8 0 25 F08
P0DHP8 0 25 F09
P0DHP8 0 25 F010
P0DHP8 0 25 F011
P0DHP8 0 25 F012
P0DHP8 0 25 F013
P0DHP8 0 25 F014
P0DHP8 0 25 F015
P0DHP8 0 25 F016
P0DHP8 0 25 F017
P0DHP8 0 25 F018
P0DHP8 0 25 F019
P0DHP8 0 25 F020
P0DHP8 0 25 F021
P0DHP8 0 25 F022
P0DHP8 0 25 F023
P0DHP8 0 25 F024
P0DHP8 0 25 F025
P0DHP8 0 25 F026
P0DHP8 0 25 F027
P0Header 8X2 0 M01 P0Header 8X2 0 M02
P0Header 8X2 0 M03 P0Header 8X2 0 M04
P0Header 8X2 0 M05 P0Header 8X2 0 M06
P0Header 8X2 0 M07 P0Header 8X2 0 M08
P0Header 8X2 0 M09 P0Header 8X2 0 M010
P0Header 8X2 0 M011 P0Header 8X2 0 M012
P0Header 8X2 0 M013 P0Header 8X2 0 M014
P0Header 8X2 0 M015 P0Header 8X2 0 M016
P0Header 8X2 0 M01 P0Header 8X2 0 M02
P0Header 8X2 0 M03 P0Header 8X2 0 M04
P0Header 8X2 0 M05 P0Header 8X2 0 M06
P0Header 8X2 0 M07 P0Header 8X2 0 M08
P0Header 8X2 0 M09 P0Header 8X2 0 M010
P0Header 8X2 0 M011 P0Header 8X2 0 M012
P0Header 8X2 0 M013 P0Header 8X2 0 M014
P0Header 8X2 0 M015 P0Header 8X2 0 M016
P0Header 8X2 0 F01 P0Header 8X2 0 F02
P0Header 8X2 0 F03 P0Header 8X2 0 F04
P0Header 8X2 0 F05 P0Header 8X2 0 F06
P0Header 8X2 0 F07 P0Header 8X2 0 F08
P0Header 8X2 0 F09 P0Header 8X2 0 F010
P0Header 8X2 0 F011 P0Header 8X2 0 F012
P0Header 8X2 0 F013 P0Header 8X2 0 F014
P0Header 8X2 0 F015 P0Header 8X2 0 F016
P0Header 8X2 0 F01 P0Header 8X2 0 F02
P0Header 8X2 0 F03 P0Header 8X2 0 F04
P0Header 8X2 0 F05 P0Header 8X2 0 F06
P0Header 8X2 0 F07 P0Header 8X2 0 F08
P0Header 8X2 0 F09 P0Header 8X2 0 F010
P0Header 8X2 0 F011 P0Header 8X2 0 F012
P0Header 8X2 0 F013 P0Header 8X2 0 F014
P0Header 8X2 0 F015 P0Header 8X2 0 F016
P0G101
P0G102
P0G103
P0G104
P0G105
P0G106
P0G107
P0G108
P0G109
P0G1010
P0G1011
P0G1012
P0G1013
P0G1014
P0G1015
P0G1016
P0G1017
P0G1018
P0G1019
P0G1020
P0G1021
P0G1022
P0G1023
P0G1024
P0G1025
P0G1026
P0G1027
P0G201
P0G202
P0G203
P0G204
P0G205
P0G206
P0G207
P0G208
P0G209
P0G2010
P0G2011
P0G301
P0G302
P0G303
P0G304
P0G305
P0G306
P0G307
P0G308
P0G309
P0G3010
P0G3011
P0G401
P0G402
P0G403
P0G404
P0G405
P0G406
P0G407
P0G408
P0G409
P0G4010
P0G4011
P0G501
P0G502
P0G503
P0G504
P0G505
P0G506
P0G507
P0G508
P0G509
P0G5010
P0G5011
P0G801
P0G802
P0G803
P0G804
P0G805
P0G806
P0G807
P0G808
P0G901
P0G902
P0G903
P0G904
P0G905
P0G906
P0G1001
P0G1001A P0G1001B
P0G1002
P0G1002A P0G1002B
P0G1003
P0G1003A P0G1003B
P0LP100 (1)01
P0LP100 (1)02
P0LP100 (1)03
P0LP100 (1)04
P0LP100 (1)05
P0LP100 (1)06
P0LP100 (1)07
P0LP100 (1)08
P0LP100 (1)09
P0LP100 (1)010
P0LP100 (1)011
P0MD100 (1)01
P0MD100 (1)02
P0MD100 (1)03
P0MD100 (1)04
P0MD100 (1)05
P0MD100 (1)06
P0MD100 (1)07
P0MD100 (1)08
P0MD100 (1)09
P0MD100 (1)010
P0MD100 (1)011
P0W1A01
P0W1A02
P0W1A03
P0W1A04
P0W1A05
P0W1A06
P0W1A07
P0W1A08
P0W1A09
P0W1A010
P0W1A011
P0W1A012
P0W1A013
P0W1A014
P0W1A015
P0W1A016
P0W1A017
P0W1A018
P0W1A019
P0W1A020
P0W1A021
P0W1A022
P0W1A023
P0W1A024
P0W1A025
P0W1A026
P0W1A027
P0W1 B01
P0W1 B02
P0W1 B03
P0W1 B04
P0W1 B05
P0W1 B06
P0W1 B07
P0W1 B08
P0W1 B09
P0W1 B010
P0W1 B011
P0W1 B012
P0W1 B013
P0W1 B014
P0W1 B015
P0W1 B016
P0W1 B017
P0W1 B018
P0W1 B019
P0W1 B020
P0W1 B021
P0W1 B022
P0W1 B023
P0W1 B024
P0W1 B025
P0W1 B026
P0W1 B027
P0W3 A01
P0W3 A02
P0W3 A03
P0W3 A04
P0W3 A05
P0W3 A06
P0W3 A07
P0W3 A08
P0W3 A09
P0W3 A010
P0W3 A011
P0W3 B01
P0W3 B02
P0W3 B03
P0W3 B04
P0W3 B05
P0W3 B06
P0W3 B07
P0W3 B08
P0W3 B09
P0W3 B010
P0W3 B011
P0W3 C01
P0W3 C02
P0W3 C03
P0W3 C04
P0W3 C05
P0W3 C06
P0W3 C07
P0W3 C08
P0W3 C09
P0W3 C010
P0W3 C011
P0W4 A01
P0W4 A02
P0W4 A03
P0W4 A04
P0W4 A05
P0W4 A06
P0W4 A07
P0W4 A08
P0W4 A09
P0W4 A010
P0W4 A011
P0W4 U01
P0W4 U02
P0W4 U03
P0W4 U04
P0W4 U05
P0W4 U06
P0W4 U07
P0W4 U08
P0W4 U09
P0W4 U010
P0W4 U011
P0W5 A01
P0W5 A02
P0W5 A03
P0W5 A04
P0W5 A05
P0W5 A06
P0W5 A07
P0W5 A08
P0W5 A09
P0W5 A010
P0W5 A011
P0W5 B01
P0W5 B02
P0W5 B03
P0W5 B04
P0W5 B05
P0W5 B06
P0W5 B07
P0W5 B08
P0W5 B09
P0W5 B010
P0W5 B011
P0W8 PA01
P0W8 PA02
P0W8 PA03
P0W8 PA04
P0W8 PA05
P0W8 PA06
P0W8 PA07
P0W8 PA08
P0W8 PA09
P0W8 PA010
P0W8 PB01
P0W8 PB02
P0W8 PB03
P0W8 PB04
P0W8 PB05
P0W8 PB06
P0W8 PB07
P0W8 PB08
P0W8U01
P0W8U02
P0W8U03
P0W8U04
P0W8U05
P0W8U06
P0W8U07
P0W8U08
P0W8U09
P0W8U010
P0W9U01
P0W9U02
P0W9U03
P0W9U04
P0W9U05
P0W9U06
P0W10 PC01 P0W10 PC01A P0W10 PC01B
P0W10 PC02 P0W10 PC02A P0W10 PC02B
P0W10 PC03 P0W10 PC03A P0W10 PC03B
P0ZD100 (2)01
P0ZD100 (2)02
P0ZD100 (2)03
P0ZD100 (2)04
P0ZD100 (2)05
P0ZD100 (2)06
P0ZD100 (2)07
P0ZD100 (2)08
P0ZD100 (2)09
P0ZD100 (2)010
P0ZD100 (2)011
P0G1014
P0G1018
P0G1019
P0G1020
P0G1021
P0G1022
P0G1023
P0G1024
P0G1025
P0G1026
P0G1027
P0G205
P0G2010
P0G2011
P0G305
P0G3010
P0G3011
P0G405
P0G4010
P0G4011
P0G509
P0G5010
P0G5011
P0G1002
P0G1002A P0G1002B
P0G1003
P0G1003A P0G1003B
P0Header 8X2 0 M01
P0Header 8X2 0 M01 P0Header 8X2 0 M03
P0Header 8X2 0 M03 P0Header 8X2 0 M05
P0Header 8X2 0 M05
P0Header 8X2 0 M07
P0Header 8X2 0 M07
P0Header 8X2 0 M09
P0Header 8X2 0 M09
P0Header 8X2 0 M011
P0Header 8X2 0 M011
P0Header 8X2 0 M013
P0Header 8X2 0 M013
P0Header 8X2 0 M015
P0Header 8X2 0 M015 P0Header 8X2 0 M016
P0Header 8X2 0 M016
P0LP100 (1)05
P0MD100 (1)05
N0GND
N0GND
N0GND
P0/CLK
P0/CLK
P0/DIR
P0/DIR
P0GND
P0GND
P0GND P0GND
P0GND
P0GND
P0GND
P0G101
P0IRQ CLR >
P0G102
P0A/B >
P0G103
P0STOP > SMC81
P0G104
P0M3 > SMC81
P0G105
P0M2 > SMC81
P0G106
P0M1 > SMC81
P0G107
P0DIR > SMC81
P0G108
P0EN > SMC81
P0G109
P0CLK > SMC81
P0G1010
P0IRQ <
P0G1011
P0CLK < ZD100/PC
P0G1012
P0B < MOK40
P0G1013
P0A < MOK40
P0G1015
P0DIR/ TEST IRQ <
P0G1016
P0OVR CLR >
P0G1017
P0OVR <
P0G201
P0G202
P0G203
P0G303
P0G403
P0LP100 (1)03
P0MD100 (1)03 P0KANA£ 0 A
P0KANA£ 0 A P0KANA£ 0 A
P0KANA£ 0 A
P0KANA£ 0 A
P0G204
P0G304
P0G404
P0LP100 (1)04
P0MD100 (1)04 P0KANA£ 0 B
P0KANA£ 0 B P0KANA£ 0 B
P0KANA£ 0 B
P0KANA£ 0 B
P0G206
P0G207
P0G208
P0G209
P0G301
P0G302
P0G402
P0LP100 (1)02
P0MD100 (1)02 P0KANA£ 0 C
P0KANA£ 0 C
P0KANA£ 0 C
P0KANA£ 0 C P0G306
P0G307
P0G308
P0G309
P0G401
P0LP100 (1)01
P0MD100 (1)01
P0VCC +12V
P0VCC +12V
P0VCC +12V
P0G406
P0G407
P0G408
P0G409
P0G501 P0ZD100 (2)01
P0DIR/ (GND) P0DIR/ (GND)
P0G503
P0G504
P0G505
P0G507 P0ZD100 (2)07
P0CLK/ (GND) P0CLK/ (GND)
P0G508
P0G801 P0A
P0G802 P0A/
P0G803 P0A*
P0G804 P0A*/
P0G805 P0B
P0G806 P0B/
P0G807 P0B*
P0G808 P0B*/
P0G901 P0W9U01 P0ZASIL0SMC81 32V + P0ZASIL0SMC81 32V +
P0G902 P0W9U02 P0ZASIL0SMC81 GND P0ZASIL0SMC81 GND
P0G903 P0W9U03 P0FAZA 0 B/ P0FAZA 0 B/
P0G904 P0W9U04 P0FAZA 0 B P0FAZA 0 B
P0G905 P0W9U05 P0FAZA 0 A/ P0FAZA 0 A/
P0G906 P0W9U06 P0FAZA 0 A P0FAZA 0 A
P0G1001
P0G1001A P0G1001B P0VCC +32V
P0LP100 (1)06
P0LP100 (1)07
P0LP100 (1)08
P0LP100 (1)09
P0LP100 (1)010
P0LP100 (1)011
P0MD100 (1)06
P0MD100 (1)07
P0MD100 (1)08
P0MD100 (1)09
P0MD100 (1)010
P0MD100 (1)011
P0W1A01 P0W1 B01
P0W1A02 P0W1 B02
P0W1A03 P0W1 B03
P0W1A04 P0W1 B04
P0W1A05 P0W1 B05
P0W1A06 P0W1 B06
P0W1A07 P0W1 B07
P0W1A08 P0W1 B08
P0W1A09 P0W1 B09
P0W1A010 P0W1 B010
P0W1A011 P0W1 B011
P0W1A012 P0W1 B012
P0W1A013 P0W1 B013
P0W1A014 P0W1 B014
P0W1A015 P0W1 B015
P0W1A016 P0W1 B016
P0W1A017 P0W1 B017
P0W1A018
P0W1A019
P0W1A020
P0W1A021
P0W1A022
P0W1A023
P0W1A024
P0W1A025
P0W1 B018
P0W1 B019
P0W1 B020
P0W1 B021
P0W1 B022
P0W1 B023
P0W1 B024
P0W1 B025
P0W1A026
P0W1A027
P0W1 B026
P0W1 B027
P0W3 A01
P0W3 B01
P0W4 A01
P0W5 A09 P0W5 B09
P0BIA£Y
P0BIA£Y
P0W3 A02
P0W3 B02
P0W3 C02 P0W4 A02
P0W5 A01 P0W5 B01
P0SZARY
P0SZARY
P0SZARY
P0W3 A03
P0W3 B03
P0W3 C03 P0W4 A03
P0W5 A07 P0W5 B07
P0¯Ó£TY
P0¯Ó£TY
P0¯Ó£TY
P0W3 A04
P0W3 B04
P0W3 C04 P0W4 A04
P0W5 A06 P0W5 B06
P0CZERWONY
P0CZERWONY
P0CZERWONY
P0W3 A05
P0W3 B05
P0W3 C05 P0W4 A05
P0W5 A02 P0W5 B02
P0ZIELONY
P0ZIELONY
P0ZIELONY
P0W3 A06
P0W3 A07
P0W3 A08
P0W3 A09
P0W3 A010
P0W3 A011
P0W3 B010
P0W3 B011
P0W4 A010
P0W4 A011
P0W3 B06
P0W3 B07
P0W3 B08
P0W3 B09
P0W3 C01
P0W3 C06
P0W3 C07
P0W3 C08
P0W3 C09
P0W3 C010
P0W3 C011
P0W4 A06
P0W4 A07
P0W4 A08
P0W4 A09
P0W4 U01 P0VCC 0 BR¥ZOWY
P0W4 U02 P0KANA£ C 0 POMAR0
P0W4 U03 P0KANA£ A 0 CZARNY
P0W4 U04 P0KANA£ B 0 BIA£Y
P0W4 U05 P0GND 0 NIEBIESKI
P0W4 U06
P0W4 U07
P0W4 U08
P0W4 U09
P0W4 U010
P0W4 U011
P0W5 A03
P0W5 A04
P0W5 A05
P0W5 A08
P0W5 A010
P0W5 A011
P0W5 B03
P0W5 B04
P0W5 B05
P0W5 B08
P0W5 B010
P0W5 B011
P0W8 PA01
P0W10 PC01 P0W10 PC01A P0W10 PC01B P0VCC 0 CZARNY
P0W8 PA02
P0W10 PC02 P0W10 PC02A P0W10 PC02B
P0W10 PC03 P0W10 PC03A P0W10 PC03B P0GND 0 CZAR+CZERW
P0W8 PA03 P0W8 PB01 P0W8U03 P0A 0 CZERWONY P0A 0 CZERWONY
P0W8 PA04 P0W8 PB02 P0W8U04 P0A/ 0 ¯Ó£TY P0A/ 0 ¯Ó£TY
P0W8 PA05 P0W8 PB03 P0W8U05 P0A* 0 NIEBIESKI P0A* 0 NIEBIESKI
P0W8 PA06 P0W8 PB04 P0W8U06 P0A*/ 0 CZARNY P0A*/ 0 CZARNY
P0W8 PA07 P0W8 PB05 P0W8U07 P0B 0 BR¥ZOWY P0B 0 BR¥ZOWY
P0W8 PA08 P0W8 PB06 P0W8U08 P0B/ 0 ZIELONY P0B/ 0 ZIELONY
P0W8 PA09 P0W8 PB07 P0W8U09 P0B* 0 BIA£Y P0B* 0 BIA£Y
P0W8 PA010 P0W8 PB08 P0B*/ 0 CZAR+CZERW
P0W8U01 P0VCC 0 CZERWONY
P0W8U02 P0GND 0 NIEBIESKI
P0W8U010 P0B*/ 0 FIOLETOWY
P0ZD100 (2)03 P0KOLEKTOR OUT3
P0ZD100 (2)04 P0KOLEKTOR OUT5
P0ZD100 (2)05 P0KOLEKTOR OUT6
P0ZD100 (2)08 P0KOLEKTOR OUT4
P0ZD100 (2)09 P0GND EMITER OUT(306)
P0ZD100 (2)010
P0ZD100 (2)011
P0Header 8X2 0 F01
P0G502
P0Header 8X2 0 M02
P0Header 8X2 0 M02
P0ZD100 (2)02 P0CLK
P0CLK
P0CLK
P0CLK
P0Header 8X2 0 F03
P0Header 8X2 0 M04
P0Header 8X2 0 M04
P0EN
P0EN
P0Header 8X2 0 F05
P0G506
P0Header 8X2 0 M06
P0Header 8X2 0 M06
P0ZD100 (2)06 P0DIR
P0DIR
P0DIR
P0DIR
P0Header 8X2 0 F07
P0Header 8X2 0 M08
P0Header 8X2 0 M08
P0M1
P0M1
P0Header 8X2 0 F09
P0Header 8X2 0 M010
P0Header 8X2 0 M010
P0M2
P0M2
P0Header 8X2 0 F011
P0Header 8X2 0 M012
P0Header 8X2 0 M012
P0M3
P0M3
P0Header 8X2 0 F013
P0Header 8X2 0 M014
P0Header 8X2 0 M014
P0STOP
P0STOP
P0Header 8X2 0 F015 P0Header 8X2 0 F016
P0DHP8 0 25 F017
P0DHP8 0 25 F018
P0DHP8 0 25 F019
P0DHP8 0 25 F020
P0DHP8 0 25 F021
P0DHP8 0 25 F022
P0DHP8 0 25 F023
P0DHP8 0 25 F024
P0DHP8 0 25 F025
P0DHP8 0 25 F026
P0DHP8 0 25 F027
P0CLK
P0EN
P0DIR
P0M1
P0M2
P0M3
P0STOP
P0IRQ CLR >
P0A/B >
P0STOP > SMC81
P0M3 > SMC81
P0M2 > SMC81
P0M1 > SMC81
P0DIR > SMC81
P0EN > SMC81
P0CLK > SMC81
P0IRQ <
P0CLK < ZD100/PC
P0B < MOK40
P0A < MOK40
P0DIR/ TEST IRQ <
P0OVR CLR >
P0OVR <
P0KANA£ 0 A
P0KANA£ 0 B
P0KANA£ 0 C
P0VCC +12V
P0DIR/ (GND)
P0CLK/ (GND)
P0A
P0A/
P0A*
P0A*/
P0B
P0B/
P0B*
P0B*/
P0ZASIL0SMC81 32V +
P0ZASIL0SMC81 GND
P0FAZA 0 B/
P0FAZA 0 B
P0FAZA 0 A/
P0FAZA 0 A
P0VCC +32V
P0/CLK
P0/DIR
P0GND
P0BIA£Y
P0SZARY
P0¯Ó£TY
P0CZERWONY
P0ZIELONY
P0VCC 0 BR¥ZOWY
P0KANA£ C 0 POMAR0
P0KANA£ A 0 CZARNY
P0KANA£ B 0 BIA£Y
P0GND 0 NIEBIESKI
P0VCC 0 CZARNY
P0GND 0 CZAR+CZERW
P0A 0 CZERWONY
P0A/ 0 ¯Ó£TY
P0A* 0 NIEBIESKI
P0A*/ 0 CZARNY
P0B 0 BR¥ZOWY
P0B/ 0 ZIELONY
P0B* 0 BIA£Y
P0B*/ 0 CZAR+CZERW
P0VCC 0 CZERWONY
P0GND 0 NIEBIESKI
P0B*/ 0 FIOLETOWY
P0KOLEKTOR OUT3
P0KOLEKTOR OUT5
P0KOLEKTOR OUT6
P0KOLEKTOR OUT4
P0GND EMITER OUT(306)
N0GND
P0G1014
P0G1018
P0G1019
P0G1020
P0G1021
P0G1022
P0G1023
P0G1024
P0G1025
P0G1026
P0G1027
P0G205
P0G2010
P0G2011
P0G305
P0G3010
P0G3011
P0G405
P0G4010
P0G4011
P0G509
P0G5010
P0G5011
P0G1002
P0G1002A P0G1002B
P0G1003
P0G1003A P0G1003B
P0Header 8X2 0 M01
P0Header 8X2 0 M03
P0Header 8X2 0 M05
P0Header 8X2 0 M07
P0Header 8X2 0 M09
P0Header 8X2 0 M011 P0Header 8X2 0 M013
P0Header 8X2 0 M015
P0Header 8X2 0 M016
P0LP100 (1)05
P0MD100 (1)05
P0/CLK
P0/DIR
P0GND
P0G101
P0IRQ CLR >
P0G102
P0A/B >
P0G103
P0STOP > SMC81
P0G104
P0M3 > SMC81
P0G105
P0M2 > SMC81
P0G106
P0M1 > SMC81
P0G107
P0DIR > SMC81
P0G108
P0EN > SMC81
P0G109
P0CLK > SMC81
P0G1010
P0IRQ <
P0G1011
P0CLK < ZD100/PC
P0G1012
P0B < MOK40
P0G1013
P0A < MOK40
P0G1015
P0DIR/ TEST IRQ <
P0G1016
P0OVR CLR >
P0G1017
P0OVR <
P0G201
P0G202
P0G203
P0G303
P0G403
P0LP100 (1)03
P0MD100 (1)03 P0KANA£ 0 A
P0G204
P0G304
P0G404
P0LP100 (1)04
P0MD100 (1)04 P0KANA£ 0 B
P0G206
P0G207
P0G208
P0G209
P0G301
P0G302
P0G402
P0LP100 (1)02
P0MD100 (1)02 P0KANA£ 0 C
P0G306
P0G307
P0G308
P0G309
P0G401
P0LP100 (1)01
P0MD100 (1)01
P0VCC +12V
P0G406
P0G407
P0G408
P0G409
P0G501 P0ZD100 (2)01
P0DIR/ (GND)
P0G503
P0G504
P0G505
P0G507 P0ZD100 (2)07
P0CLK/ (GND)
P0G508
P0G801 P0A
P0G802 P0A/
P0G803 P0A*
P0G804 P0A*/
P0G805 P0B
P0G806 P0B/
P0G807 P0B*
P0G808 P0B*/
P0G901 P0W9U01 P0ZASIL0SMC81 32V +
P0G902 P0W9U02 P0ZASIL0SMC81 GND
P0G903 P0W9U03 P0FAZA 0 B/
P0G904 P0W9U04 P0FAZA 0 B
P0G905 P0W9U05 P0FAZA 0 A/
P0G906 P0W9U06 P0FAZA 0 A
P0G1001
P0G1001A P0G1001B P0VCC +32V
P0LP100 (1)06
P0LP100 (1)07
P0LP100 (1)08
P0LP100 (1)09
P0LP100 (1)010
P0LP100 (1)011
P0MD100 (1)06
P0MD100 (1)07
P0MD100 (1)08
P0MD100 (1)09
P0MD100 (1)010
P0MD100 (1)011
P0W1A01 P0W1 B01
P0W1A02 P0W1 B02
P0W1A03 P0W1 B03
P0W1A04 P0W1 B04
P0W1A05 P0W1 B05
P0W1A06 P0W1 B06
P0W1A07 P0W1 B07
P0W1A08 P0W1 B08
P0W1A09 P0W1 B09
P0W1A010 P0W1 B010
P0W1A011 P0W1 B011
P0W1A012 P0W1 B012
P0W1A013 P0W1 B013
P0W1A014 P0W1 B014
P0W1A015 P0W1 B015
P0W1A016 P0W1 B016
P0W1A017 P0W1 B017
P0W1A018
P0W1A019
P0W1A020
P0W1A021
P0W1A022
P0W1A023
P0W1A024
P0W1A025
P0W1 B018
P0W1 B019
P0W1 B020
P0W1 B021
P0W1 B022
P0W1 B023
P0W1 B024
P0W1 B025
P0W1A026
P0W1A027
P0W1 B026
P0W1 B027
P0W3 A01
P0W3 B01
P0W4 A01
P0W5 A09 P0W5 B09
P0BIA£Y
P0W3 A02
P0W3 B02
P0W3 C02 P0W4 A02
P0W5 A01 P0W5 B01
P0SZARY
P0W3 A03
P0W3 B03
P0W3 C03 P0W4 A03
P0W5 A07 P0W5 B07
P0¯Ó£TY
P0W3 A04
P0W3 B04
P0W3 C04 P0W4 A04
P0W5 A06 P0W5 B06
P0CZERWONY
P0W3 A05
P0W3 B05
P0W3 C05 P0W4 A05
P0W5 A02 P0W5 B02
P0ZIELONY
P0W3 A06
P0W3 A07
P0W3 A08
P0W3 A09
P0W3 A010
P0W3 A011
P0W3 B010
P0W3 B011
P0W4 A010
P0W4 A011
P0W3 B06
P0W3 B07
P0W3 B08
P0W3 B09
P0W3 C01
P0W3 C06
P0W3 C07
P0W3 C08
P0W3 C09
P0W3 C010
P0W3 C011
P0W4 A06
P0W4 A07
P0W4 A08
P0W4 A09
P0W4 U01 P0VCC 0 BR¥ZOWY
P0W4 U02 P0KANA£ C 0 POMAR0
P0W4 U03 P0KANA£ A 0 CZARNY
P0W4 U04 P0KANA£ B 0 BIA£Y
P0W4 U05 P0GND 0 NIEBIESKI
P0W4 U06
P0W4 U07
P0W4 U08
P0W4 U09
P0W4 U010
P0W4 U011
P0W5 A03
P0W5 A04
P0W5 A05
P0W5 A08
P0W5 A010
P0W5 A011
P0W5 B03
P0W5 B04
P0W5 B05
P0W5 B08
P0W5 B010
P0W5 B011
P0W8 PA01
P0W10 PC01 P0W10 PC01A P0W10 PC01B P0VCC 0 CZARNY
P0W8 PA02
P0W10 PC02 P0W10 PC02A P0W10 PC02B
P0W10 PC03 P0W10 PC03A P0W10 PC03B P0GND 0 CZAR+CZERW
P0W8 PA03 P0W8 PB01 P0W8U03 P0A 0 CZERWONY
P0W8 PA04 P0W8 PB02 P0W8U04 P0A/ 0 ¯Ó£TY
P0W8 PA05 P0W8 PB03 P0W8U05 P0A* 0 NIEBIESKI
P0W8 PA06 P0W8 PB04 P0W8U06 P0A*/ 0 CZARNY
P0W8 PA07 P0W8 PB05 P0W8U07 P0B 0 BR¥ZOWY
P0W8 PA08 P0W8 PB06 P0W8U08 P0B/ 0 ZIELONY
P0W8 PA09 P0W8 PB07 P0W8U09 P0B* 0 BIA£Y
P0W8 PA010 P0W8 PB08 P0B*/ 0 CZAR+CZERW
P0W8U01 P0VCC 0 CZERWONY
P0W8U02 P0GND 0 NIEBIESKI
P0W8U010 P0B*/ 0 FIOLETOWY
P0ZD100 (2)03 P0KOLEKTOR OUT3
P0ZD100 (2)04 P0KOLEKTOR OUT5
P0ZD100 (2)05 P0KOLEKTOR OUT6
P0ZD100 (2)08 P0KOLEKTOR OUT4
P0ZD100 (2)09 P0GND EMITER OUT(306)
P0ZD100 (2)010
P0ZD100 (2)011
P0Header 8X2 0 F01
P0G502
P0Header 8X2 0 M02
P0ZD100 (2)02 P0CLK
P0Header 8X2 0 F03
P0Header 8X2 0 M04 P0EN
P0Header 8X2 0 F05
P0G506
P0Header 8X2 0 M06
P0ZD100 (2)06 P0DIR
P0Header 8X2 0 F07
P0Header 8X2 0 M08 P0M1
P0Header 8X2 0 F09
P0Header 8X2 0 M010 P0M2
P0Header 8X2 0 F011
P0Header 8X2 0 M012 P0M3
P0Header 8X2 0 F013
P0Header 8X2 0 M014 P0STOP
P0Header 8X2 0 F015 P0Header 8X2 0 F016
P0DHP8 0 25 F017
P0DHP8 0 25 F018
P0DHP8 0 25 F019
P0DHP8 0 25 F020
P0DHP8 0 25 F021
P0DHP8 0 25 F022
P0DHP8 0 25 F023
P0DHP8 0 25 F024
P0DHP8 0 25 F025
P0DHP8 0 25 F026
P0DHP8 0 25 F027
Rysunek 3.26: Opis przewodów do montażu stanowiska w 1, 2 i 3 trybie pracy

3.13. Wnioski 67
1
1
2
2
3
3
4
4
D D
C C
B B
A A
Title
Number RevisionSize
A4
Date: 2007-01-26 Sheet ofFile: W:\work_studia\..\schemat_blokowy_z.schdocDrawn By:
SMC81
STEROWNIK
M
+VC
CG
ND
A/AB/B
1
ZN 100LZASILACZ NIESTABILIZOWANY
ZD100ZADAJNIK
A B C D E F G H I
LP 100PRĘDKOŚCIOMIERZ
A B C D E F G H I
MD 100LICZNIK UNIWERSALNY
A B C D E F G H I
Vcc 230V 50Hz
MOK 40
PRZETWORNIK
ZERO220VAC220VAC
GNDGND
+32V+32V
SILNIK KROKOWY
57BYG 081D
1 1
1
1
SILNIKA KROKOWEGO
DB9 - F (1)
DB9 - M (2)
(3)
(4/5)
(6)
DB9 - F (1)
DB9 - F (1)
(2/3)
(2/3)
(4)
(4)
Anna Cieśnik
Schemat blokowy - sterowanie i pomiary na PC
W1
B
W1 A
W4 UDB9 - F
A - CZERWONYA/ - ŻÓŁTYA* - NIEBIESKIA*/ - CZARNYB - BRĄZOWYB/ - ZIELONYB* - BIAŁYB*/ - FIOLETOWY
GND - NIEBIESKIVcc - CZERWONY
GND - NIEBIESKIVcc - CZERWONY
FAZA B/ - ZIELONYFAZA B - BRĄZOWYFAZA A/ - ZÓŁTYFAZA A - CZERWONY
OBROTOWO-IMPULSOWY 2-FAZOWY (HYBRYDOWY)
W8 UHeader10 - F
DHP8 - 25 F
DHP8 - 25 M
W8 PA
Header10 - M
W8 PBHeader8 - F
W9 UHeader6 - F
Header2x8 - FW11 B
W11 AHeader2x8 - F
W7 UPWR2.1
PWR2.5W10 PC
P0FAZA A 0 CZERWONY P0FAZA A 0 CZERWONY P0FAZA A 0 CZERWONY
Rysunek 3.27: Schemat montażowy stanowiska do łączonej pracy komputerai urządzeń sterujących/pomiarowych
1
1
2
2
3
3
4
4
D D
C C
B B
A A
Title
Number RevisionSize
A4
Date: 2007-01-26 Sheet ofFile: W:\work_studia\..\schemat_blokowy_z_min.schdocDrawn By:
SMC81
STEROWNIK
M
+VC
CG
ND
A/AB/B
1
ZN 100L
ZASILACZ NIESTABILIZOWANY Vcc 230V 50Hz
MOK 40
PRZETWORNIK
ZERO220VAC220VAC
GNDGND
+32V+32V
SILNIK KROKOWY
57BYG 081D
SILNIKA KROKOWEGO
Anna Cieśnik
Schemat montażowy - sterowanie i pomiary na PC
W1
B
W1 A
W4 U
DB9 - F
A - CZERWONYA/ - ŻÓŁTYA* - NIEBIESKIA*/ - CZARNYB - BRĄZOWYB/ - ZIELONYB* - BIAŁYB*/ - FIOLETOWY
GND - NIEBIESKIVcc - CZERWONY
GND - NIEBIESKIVcc - CZERWONY
FAZA B/ - ZIELONYFAZA B - BRĄZOWYFAZA A/ - ZÓŁTYFAZA A - CZERWONY
OBROTOWO-IMPULSOWY 2-FAZOWY (HYBRYDOWY)
W8 UHeader10 - F
DHP8 - 25 F
DHP8 - 25 M
W8 PAHeader10 - M
W8 PBHeader8 - F
W9 UHeader6 - F
Header2x8 - FW11 B
W11 AHeader2x8 - F
W7 UPWR2.1
PWR2.5W10 PC
P0FAZA A 0 CZERWONY P0FAZA A 0 CZERWONY P0FAZA A 0 CZERWONY
Rysunek 3.28: Schemat montażowy stanowiska do pracy z komputerem przezukład PEdASK

Rozdział 4
Oprogramowanie
4.1 Ogólny opis
Oprogramowanie składa się z programu głównego oraz ze sterownika progra-
mowego portu LPT komputera. Program główny został napisany w języku C++
przy pomocy środowiska Borland Builder 6 [36, 20, 23]. Sterownik natomiast został
stworzony w języku C przy pomocy środowiska Windows Driver Development Kit.
Oprogramowanie umożliwia sterowanie i analizowanie, poprzez port LPT oraz
układ zewnętrzny, pracy silnika krokowego.
Aplikacja może zostać uruchomiona tylko i wyłącznie na komputerze z 32 bi-
towym procesorem kompatybilnym z Intel i386, na 32 bitowym systemie Microsoft
Windows XP, wymagane jest konto z uprawnieniami administratora. Ograniczenia
te wynikają z zastosowanego sterownika systemowego, który został opracowany dla
wymienionego systemu. Możliwe, że program może także pracować poprawnie pod
innymi systemami NT, jednakże nie zostało to sprawdzone.
4.2 Założenia
Oprogramowanie powstawało równolegle z układem zewnętrznym. Na początku
zostały ustalone informacje i sygnały jakimi wymieniają się te dwa składniki sys-
temu sterowania. Jednym z założeń do oprogramowania było umożliwienie dużej
dokładności pomiaru. Z tego powodu zdecydowano się na wykorzystanie przerwania
dostępnego w porcie LPT. Jako, że komputery w laboratorium mają zainstalowany
system Microsoft Windows XP problemem okazał się dostęp do portu. Problem
ten wynika z zabezpieczeń systemu [18]. Niemożliwe jest bezpośredni zapis i odczyt
danych z tego portu. Można było wykorzystać darmowe biblioteki dostępne w In-
ternecie. Jednakże po zaznajomieniu się z kilkoma z nich okazało się, że co prawda
umożliwiają one bezpośredni dostęp do rejestrów portu, jednak żadna nie umożli-
wia obsłużenia przerwania generowanego przez port. Na podstawie opisów bibliotek
68

4.3. Opis portu LPT 69
komercyjnych obsługujących przerwanie okazało się, że wymagany dostęp do reje-
strów portu oraz obsługę przerwania można zrealizować wykorzystując sterownik
urządzenia pracujący w trybie jądra systemu [18].
4.3 Opis portu LPT
Rejestr bazowy portu LPT znajduje się pod adresem 378h lub 278h w zależno-
ści od ustawień BIOS’u komputera. Także przypisane do portu przerwanie można
zmienić (IRQ5 lub IRQ7). [17] W naszym oprogramowaniu wykorzystujemy adres
portu 378h i przerwanie IRQ7, i tylko przy takich ustawieniach możliwa jest współ-
praca oprogramowania z układem elektronicznym. Dodatkowo port powinien być
ustawiony w tryb Output only lub ECC 1.7. Natomiast w zakładce dotyczącej portu
LPT Menedżera urządzeń należy zaznaczyć opcję Korzystaj z dowolnego przerwania
przypisanego do portu. Napięcia na pinach portu wynoszą odpowiednio, dla jedynki
logicznej 2–5,5V, natomiast dla zera logicznego 0–0,8V — zgodnie ze standardemTTL.
STROBE
D0
D1
D2
D3
D4
D5
D6
D7
ACK
BUSY
P-ERR
ONLINE
AUTO-LINEFEED
ERROR
INIT
SELECT
1
14
13
25
(a) Rozmieszczenie pinów w porcieLPT
IRQ CLR ⇒
A/B ⇒
STOP ⇒ SMC81
M3 ⇒ SMC81
M2 ⇒ SMC81
M1 ⇒ SMC81
DIR ⇒ SMC81
EN ⇒ SMC81
CLK ⇒ SMC81
IRQ ⇐
CLK ⇐ ZD100 / C ⇐ MOK40
A ⇐MOK40
B ⇐MOK40
BOARD ⇐
DIR ⇐ ZD100 / IRQ TEST ⇐
OVF CLR ⇒
OVF ⇐
1
14
13
25
(b) Wykorzystanie pinów w porcieLPT
Na rysunkach przedstawiono wykorzystanie poszczególnych pinów portu LPT
oraz kierunki przepływu danych.
Sygnały odbierane przez płytkę:
IRQ CLR — Sygnał kasowania przerwania zgłoszonego przez płytkę.
A/B — Ustawienie płytki w odpowiedni stan pracy.

4.3. Opis portu LPT 70
Tablica 4.1: Opis pinów oraz wykorzystania portu równoległego w zastosowanejkomunikacji PC–PEdASK
Numer pinu Przydzielone Kierunek Rejestr Numer Negacja(D 25) sygnały w proj. In/out bitu rej. sprzętowa
1 IRQ CLR ⇒ In/Out Kontrolny 0 tak2 A/B ⇒ Out Danych 03 STOP ⇒ SMC81 Out Danych 14 M3 ⇒ SMC81 Out Danych 25 M2 ⇒ SMC81 Out Danych 36 M1 ⇒ SMC81 Out Danych 47 DIR ⇒ SMC81 Out Danych 58 EN ⇒ SMC81 Out Danych 69 CLK ⇒ SMC81 Out Danych 710 IRQ ⇐ In Statusowy 611 CLK ⇐ ZD100 / C ⇐ MOK40 In Statusowy 7 tak12 B ⇐ MOK40 In Statusowy 513 A ⇐ MOK40 In Statusowy 414 BOARD In/Out Kontrolny 1 tak15 DIR ⇐ ZD100 / TEST IRQ In Statusowy 316 OVR CLR ⇒ In/Out Kontrolny 217 OVR ⇐ In/Out Kontrolny 3 tak18–25 GND Gnd
STOP — Sygnał stopu (patrz opis płytki).
M1, M2, M3 — Sygnały podziału kroku.
DIR — Sygnał kierunku ruchu silnika.
CLK — Sygnał zegarowy sterujący pracą silnika.
OVF CLR — Sygnał kasowania przepełnienia w płytce.
Sygnały odbierane przez komputer:
ACK — Przerwanie generowane przez płytkę.
CLK ZD100 — Sygnał zegara generowany przez ZD100.
A — Sygnał kanału A enkodera.
B — Sygnał kanału B enkodera.
BOARD — Sygnalizacja obecności płytki.
DIR ZD100 — Sygnał kierunku ruchu generowany przez ZD100.
OVF — Sygnał przepełnienia generowany przez płytkę.
W oprogramowaniu nie zaimplementowano obsługi sygnałów: C enkodera MOK40,
BOARD, OVF, OVFCLR, TESTIRQ. Niemożliwe okazało się wykorzystanie sygnału
CLK ZD100. Sygnał C enkodera MOK40 nie jest niezbędny do poprawnego działa-
nia opracowanego systemu. Sygnał OVF nie jest obsługiwany ze względu na odczyt
danych z portu w momentach wystąpienia przerwania. Obecne ustawienie sygnału
OVFCLR uniemożliwia zgłoszenie przez płytkę przepełnienia.

4.4. Przeznaczenie sterownika systemowego 71
Dostęp do poszczególnych pinów jest realizowany poprzez trzy rejestry, pierw-
szy znajduje się pod adresem bazowym, a następne są przesunięte względem niego
odpowiednio o +1 i +2 [17].
Tablica 4.2: Rejestr danych portu LPT, źródło [17]
bit 7 6 5 4 3 2 1 0pin 9 8 7 6 5 4 3 2
Tablica 4.3: Rejestr statusowy portu LPT, źródło [17]
bit 7 6 5 4 3 2 1 0pin 11 10 12 13 15 - - -
Tablica 4.4: Rejestr kontrolny portu LPT, źródło [17]
bit 7 6 5 4 3 2 1 0pin - - dir int 17 16 14 1
4.4 Przeznaczenie sterownika systemowego
Sterownik jest odpowiedzialny za komunikację pomiędzy programem a układem
elektronicznym.
Zadania jakie wykonuje sterownik:
• przekazuje sygnały sterowania z programu głównego do portu,
• obsługuje przerwanie generowane przez płytkę PEdASK,
• dokonuje podstawowego przetworzenia otrzymanych danych.
Za podstawową komunikację programu ze sterownikiem (od strony sterownika) od-
powiedzialne są tzw. funkcje IOCTL (ang. Input/Output Controls) [16]. Zarówno
w programie głównym jak i w sterowniku definiowane są nazwy poszczególnych
funkcji oraz struktury danych, które będą wykorzystywane w trakcie komunikacji.
Każda funkcja IOCTL jest 32-bitowym numerem. Są one definiowane przy pomocy
dyrektywy #define. Funkcje te umożliwiają zapisywanie i odczyt danych z poszcze-
gólnych rejestrów. Są one używane gdy nie zachodzi potrzeba szybkiej wymiany
informacji. Od strony programu głównego wykorzystujemy funkcję Windows API:
DeviceIoControl podając w jej argumentach nazwę funkcji sterownika, którą chcemy
wywołać oraz odpowiednie struktury danych [16].

4.4. Przeznaczenie sterownika systemowego 72
Za komunikację programu głównego ze sterownikiem w trakcie odczytu enkodera
i/lub sterowania silnikiem odpowiedzialne są funkcje Write oraz Read. Są to stan-
dardowe funkcje sterownika, dla których dostarczamy implementacji. [15] Umoż-
liwiają one szybką komunikację ze sterownikiem i portem LPT (są wywoływane
bezpośrednio, a nie tak jak funkcje IOCTL poprzez dodatkową funkcję). Funkcja
Write służy do zapisu danych do rejestru danych portu LPT (możliwe linie, które
można zmienić przy pomocy tej funkcji to DIR, CLK oraz ENABLE). Funkcja
Read jest używana do odczytu danych w trakcie działania przerwania. Od strony
programu głównego wywołanie tych funkcji sterownika następuje za pomocą funkcji
WriteFile oraz ReadFile.
Funkcja obsługi przerwania [13] jest najważniejszą funkcją sterownika programo-
wego. Odpowiada ona za generowanie danych przesyłanych do programu głównego.
W momencie przyjścia przerwania od portu LPT odczytuje ona dokładny, aktualny
czas z zegara(licznika) dużej rozdzielczości (funkcja KeQueryPerformanceCounter
[14]) . Wpisując wartość 0 do czwartego bitu rejestru kontrolnego, zabraniamy
generowania przerwań. Następnie porównujemy stan poprzedni odpowiednich sy-
gnałów ze stanem aktualnym. Jeśli wykryjemy zbocze na sygnale A lub B enkodera
to zwiększamy/zmniejszamy zmienną odpowiedzialną za wartość drogi enkodera.
Cały kod sterownika powstał na podstawie [15, 16, 13, 8]. Funkcje pobrane w
całości z wymienionych źródeł zostały wyróżnione w kodzie źródłowym sterownika.
Ponieważ funkcja obsługi przerwania powinna być wykonywana w jak najkrót-
szym czasie, przesłanie danych do programu głównego odbywa się w innej funkcji
[9]. W obsłudze przerwania jedynie zaznaczamy, że powinna ona zostać wykonana
(umieszczamy ją w kolejce do wykonania). Następnie umożliwiamy dalsze odbiera-
nie przerwań.
Przy pomocy oscyloskopu zostały przeprowadzone pomiary czasu obsługi prze-
rwania (czas pomiędzy zmianami stanu sygnału kasowania przerwania). Uzyskany
czas na komputerze zainstalowanym w laboratorium wyniósł ok. 9µs.
Odczyt sterowania ZD100 okazał się niemożliwy ze względu na bardzo krótkie
impulsy tego sygnału (1µs). Przerwanie jest generowane lecz gdy rozpocznie się jego
obsługa stan sygnału jest już taki jak przed przerwaniem, co powoduje, że sterownik
nie zauważa zmiany, która nastąpiła.
Rozwiązanie które zostało wybrane okazało się, że bardzo dobrze sprawdza się
w projekcie ponieważ system Windows XP nie jest systemem czasu rzeczywistego
[25] i niemożliwe jest, aby pogram główny nadążał za zmieniającymi się sygnałami
na porcie LPT z tak dużą częstotliwością. Jednakże mamy sprzętowo zapewnione
wywołania przerwania, dlatego w sterowniku programowym jest zabezpieczone cią-
głe przetwarzanie danych. Nawet jeżeli program główny nie będzie mógł w danym
momencie odczytać sygnałów z enkodera, wewnętrzne zmienne enkodera będą za-
wierały poprawny, aktualny obraz danych.

4.5. Moduły aplikacji 73
4.5 Moduły aplikacji
Główne elementy aplikacji to trzy następujące obiekty:
• obiekt obsługi komunikacji ze sterownikiem,
• obiekt przetwarzający zebrane dane,
• obiekt generujący trajektorię sterowania.
4.5.1 Obiekt obsługi sterownika
Obiekt obsługi sterownika jest odpowiedzialny za ładowanie sterownika do pa-
mięci, rejestrację sterownika w systemie i utrzymywanie uchwytu (ang. handle) do
niego (wykonanie powyższych działań jest możliwe tylko na koncie z uprawnieniami
administratora). Są w nim zaimplementowane takie ogólne funkcje jak np.: odczyt
i zapis całych rejestrów portu LPT, a także funkcje szczegółowe odpowiedzialne
już za sterowanie PEdASK oraz całym układem (zmiana podziału kroków, zmiana
trybu pracy układu PCHost/ZD100).
4.5.2 Obiekt przetwarzania danych
Obiekt przetwarzania danych zawiera struktury zbierające dane w czasie po-
miarów, oraz funkcje je przetwarzające. Umożliwia także zapis i odczyt pobranych
danych do/z plików.
4.5.3 Obiekt generujący trajektorię
Obiekt generujący trajektorię to najbardziej rozbudowany obiekt. Zawiera wiele
funkcji odpowiedzialnych za generowanie odpowiednich danych, składających się na
zadany ruch silnika. Jest on maksymalnie przystosowany do łatwej obsługi przy po-
mocy elementów graficznych, ponieważ wchodzi on w największą interakcję z użyt-
kownikiem.
4.6 Współpraca elementów
W programie głównym, sterowanie i odczyt danych jest przeprowadzany przy
pomocy osobnych wątków.

4.6. Współpraca elementów 74
4.6.1 Odczyt danych ze sterownika
Wątek odczytu pobiera z obiektu obsługi sterownika „uchwyt” ( ang. handle )
do sterownika. „Uchwyt” umożliwia przeprowadzanie operacji na sterowniku. Ope-
racje te mogą zostać przez sterownik zawieszone. Wątek odczytu działa w pętli,
w której wysyła do sterownika za pomocą funkcji ReadFile żądanie przesłania da-
nych. Sterownik domyślnie zawiesza wykonanie tej operacji (zwraca status STA-
TUS PENDING). Pętla przechodzi do funkcji WaitFor czekając na przesłanie da-
nych. Gdy to nastąpi, te dane są odkładane do wektora znajdującego się w obiekcie
przetwarzania danych.
Gdy odczyt danych zakończy się, następuje wywołanie funkcji przetwarzania
danych.
4.6.2 Zapis danych do sterownika
Wątek sterowania pobiera dane z obiektu generującego trajektorię silnika i przy
pomocy funkcji WriteFile wysyła je do sterownika, a ten dalej na port LPT. Du-
żym problemem okazało się odmierzanie czasu pomiędzy kolejnymi zapisami. Czas
ten powinien być dokładnie tym czasem, który został określony w danej pobranej
z obiektu trajektorii. Niemożliwe okazało się wykorzystanie tutaj ang. timer’ów sys-
temowych ze względu na ich niską rozdzielczość. Zdecydowano się na zwykłe pętle
powiązane z odczytem dokładnego czasu za pomocą funkcji QueryPerformanceCo-
unter. Nie są one idealnie dokładne, ale jest to lepsze rozwiązanie niż wykorzystanie
ang. timer’ów. Udało się także powiązać je z danym komputerem, tak że czas ich
wykonania jest na każdym komputerze zbliżony, niezależnie od rozdzielczości posia-
danego zegara.
W trakcie sterowania, po wysłaniu na port zbocza narastającego sygnału CLK
odczytujemy aktualny czas zajścia zdarzenia i odkładamy jego wartość do obiektu
przetwarzania danych. Umożliwia to zobrazowanie rzeczywiście zadanego sterowa-
nia.
4.6.3 Praca programu w trybie ZD100
W trybie tym działa tylko i wyłącznie wątek odczytu danych z PEdASK. W każ-
dej chwili poprzez naciśnięcie przycisku Stop możliwe jest przerwanie pomiaru.
Pomiar należy przeprowadzać w następującej kolejności:
1. Naciśnięcie przycisku Start w programie.
2. Rozpoczęcie sterowania z zadajnika ZD100.
3. Zakończenie sterowania z zadajnika ZD100.

4.6. Współpraca elementów 75
4. Naciśnięcie przycisku Stop w programie.
Po czasie liniowo zależnym od ilości zebranych danych zostaną one przedstawione
na wykresach. Użytkownik jest o tym informowany przez komunikaty ukazujące się
na pasku stanu aplikacji.
4.6.4 Praca programu w trybie PCHost
W tym trybie działa zarówno wątek sterowania jak i odczytu. W każdej chwili
można przerwać sterownie oraz odczyt naciskając przycisk Stop. W przypadku
dużej prędkości (powyżej 10000 imp/s) możliwe są odstępstwa pomiędzy prędkością
żądaną, a rzeczywiście zadaną.
4.6.5 Możliwe błędy
W trakcie prób sterowania silnikiem w trybie PCHost pojawiły się problemy
z przełączaniem podziału kroków w sterowniku silnika krokowego SMC81RP, ry-
sunek 4.1. Objawiało się to tym, że pomimo przełączenia się PEdASK na żądany
podział (co jest widoczne na diodach M1, M2 i M3), sterownik nie przełączał się
natychmiast lecz po wykonaniu przez silnik kilku kroków jeszcze w poprzednim po-
dziale. Zachowanie takie jest łatwe do zauważenia na powstałych z takich pomiarów
wykresach. Nie zaobserwowano takiego zachowania silnika przy sterowaniu z zadaj-
nika ZD100.
Rysunek 4.1: Błędy po przełączeniu kroków
Jako, że system Microsoft Windows XP nie jest systemem operacyjnym czasu
rzeczywistego, mogą pojawić się problemy z przesyłaniem danych pomiędzy sterow-
nikiem systemowym, a programem głównym. Tylko najważniejsze zadania systemu
są wykonywane w czasie rzeczywistym. Należy do nich także obsługa przerwań.

4.7. Interfejs użytkownika 76
Dzięki temu, że podstawowe obliczenia są przeprowadzane bezpośrednio w funkcji
Rysunek 4.2: Moment braku komunikacji
obsługi przerwania sterownika systemowego, możemy mieć pewność uzyskiwanych
wyników pomiaru przemieszczenia enkodera. Przesłanie danych pomiędzy sterow-
nikiem a programem głównym nie zawsze jest możliwe. Powoduje to utratę punk-
tów pomiarowych w programie głównym, co jest przedstawione na rysunku 4.2. Ze
względu na obliczenia prowadzone bezpośrednio w sterowniku, jego dane są aktualne
i program główny także otrzymuje aktualne dane.
4.7 Interfejs użytkownika
4.7.1 Opis elementów graficznych
Interfejs użytkownika został stworzony przy pomocy biblioteki VCL znajdują-
cej się w pakiecie Borland Builder [36].
Składa się on z dwóch głównych okien.
Pierwsze z nich jest dostępne natychmiast po uruchomieniu programu. Więk-
szość jego powierzchni zajmuje wykres, na którym po wykonaniu pomiaru wykre-
ślane są przebiegi jak na rysunku 4.3.
W tej części interfejsu znajdują się również następujące kontrolki:
• Przycisk Start/Stop odpowiedzialny za początek/koniec odczytu lub odczytu
i sterowania.
• Panel diod (ang. Check box’y) obrazujące stan diod na płytce. Zaznaczony
ang. check box oznacza diodę zaświeconą.
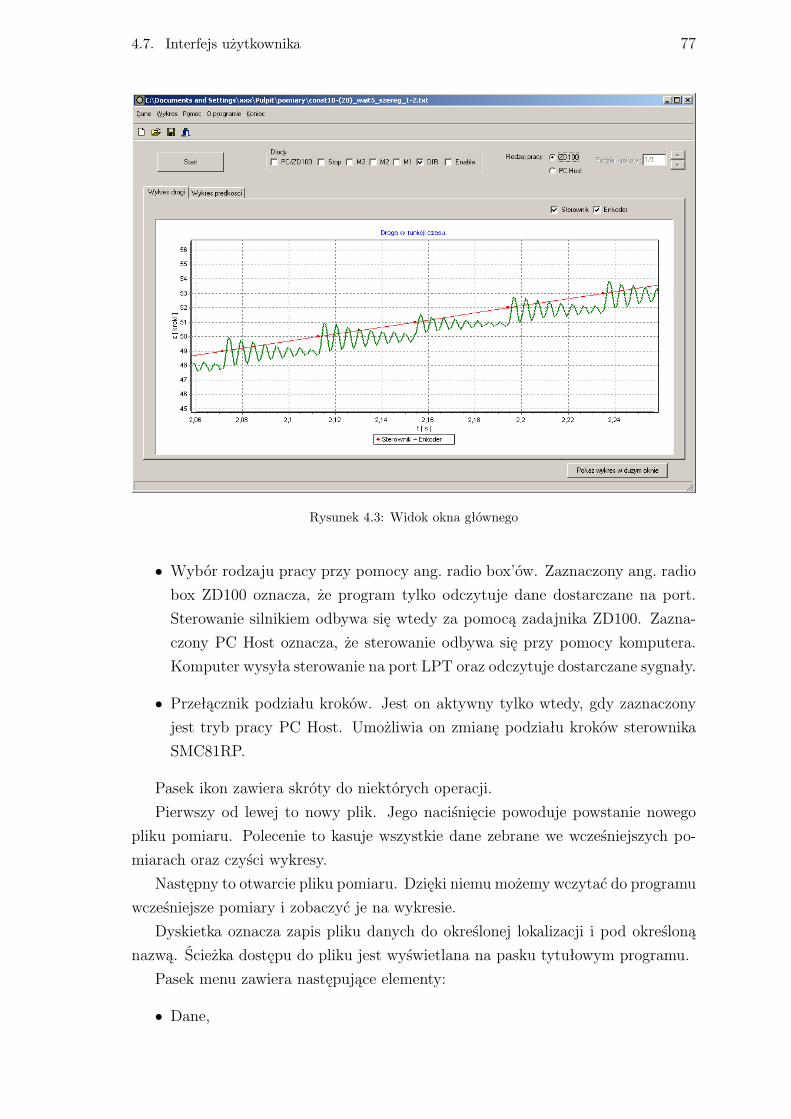
4.7. Interfejs użytkownika 77
Rysunek 4.3: Widok okna głównego
• Wybór rodzaju pracy przy pomocy ang. radio box’ów. Zaznaczony ang. radio
box ZD100 oznacza, że program tylko odczytuje dane dostarczane na port.
Sterowanie silnikiem odbywa się wtedy za pomocą zadajnika ZD100. Zazna-
czony PC Host oznacza, że sterowanie odbywa się przy pomocy komputera.
Komputer wysyła sterowanie na port LPT oraz odczytuje dostarczane sygnały.
• Przełącznik podziału kroków. Jest on aktywny tylko wtedy, gdy zaznaczony
jest tryb pracy PC Host. Umożliwia on zmianę podziału kroków sterownika
SMC81RP.
Pasek ikon zawiera skróty do niektórych operacji.
Pierwszy od lewej to nowy plik. Jego naciśnięcie powoduje powstanie nowego
pliku pomiaru. Polecenie to kasuje wszystkie dane zebrane we wcześniejszych po-
miarach oraz czyści wykresy.
Następny to otwarcie pliku pomiaru. Dzięki niemu możemy wczytać do programu
wcześniejsze pomiary i zobaczyć je na wykresie.
Dyskietka oznacza zapis pliku danych do określonej lokalizacji i pod określoną
nazwą. Ścieżka dostępu do pliku jest wyświetlana na pasku tytułowym programu.
Pasek menu zawiera następujące elementy:
• Dane,

4.7. Interfejs użytkownika 78
• Wykres,
• Pomoc,
• O programie,
• Koniec.
Menu Dane zawiera polecenia:
• Nowy plik,
• Zapis danych,
• Otwarcie danych.
Menu Wykres:
• Zapis wykresu,
• Opcje wykresu,
• Drukowanie.
Zapis wykresu umożliwia zapis wykresu w aktualnej postaci w pliku BMP (mapa bi-
towa). Opcje wykresu umożliwiają podstawową zmianę wyglądu przebiegów. Dru-
kowanie umożliwia wydrukowanie wykresów. Drukowanie odbywa się na stronie
formatu A4, w pozycji poziomej.
Zaznaczenie sterowania PC Host powoduje pojawienie się drugiego okna. Jest
ono odpowiedzialne za przygotowanie trajektorii sterowania. Składa się ono z trzech
głównych elementów:
• zbioru przycisków,
• okna edycji,
• oraz pola wykresów.
Przyciski umożliwiają stworzenie pożądanej trajektorii. Naciskając je wstawiamy
w pole edycyjne kolejne polecenia generujące trajektorię. Po naciśnięciu przycisku
Oblicz sterowanie i wyświetl wyrysowywane są wykresy obrazujące aktualny wygląd
trajektorii przygotowany na podstawie komend zawartych w polu edycji.
Znajdujące się u góry okna przyciski umożliwiają wyczyszczenie danych trajek-
torii (nowy plik), otwarcie pliku trajektorii (otwórz plik) oraz jej zapisanie (zapisz
plik). Przycisk wyjście powoduje zamknięcie całego programu. W pasku tytułowym
okna znajduje się ścieżka dostępu do aktualnego pliku trajektorii.
Program został wyposażony w podstawową pomoc w postaci podpowiedzi (tzw.
chmurek) oraz plik pomocy, który można otworzyć przy pomocy klawisza F1, lub
wybierając z paska menu. Pomoc zawiera podstawowy opis poszczególnych okien
programu oraz sposób tworzenia trajektorii.

4.7. Interfejs użytkownika 79
Rysunek 4.4: Widok okna przygotowania trajektorii
4.7.2 Opis użytkowania
Po uruchomieniu programu możemy natychmiast przystąpić do pomiarów. W try-
bie ZD100 najpierw klikamy przycisk Start, a następnie uruchamiamy sterowanie
z zadajnika ZD100. Po zakończeniu sterowania należy nacisnąć przycisk Stop (jest
to ten sam przycisk co Start, został zmieniony napis).
W zależności od długości pomiarów oraz prędkości obrotowej silnika pomiary
mogą się pojawić dopiero po pewnym czasie, przez który przeprowadzane są obli-
czenia.
W trybie PC Host pojawia się okno przygotowania trajektorii. Trajektorię wczy-
tujemy z wcześniej przygotowanego pliku lub tworzymy przy pomocy zestawu przy-
cisków. Po wygenerowaniu trajektorii (musi być ona widoczna na wykresach, jej
przygotowanie odbywa się po naciśnięciu przycisku Oblicz sterowanie i wyświetl)
przechodzimy do okna głównego. Ustalamy żądany podział kroków sterownika
SMC81RP. Następnie wciskamy przycisk Start. Rozpocznie się proces sterowania,
co jest uwidocznione komunikatem na pasku stanu okna oraz zmieniającym się sta-
nem diod na PEdASK. Silnik powinien pracować. Zatrzymanie sterowania następuje
po zakończeniu wykonania trajektorii lub po wciśnięciu przycisku Stop (ten sam co
Start — zmieniony napis).

4.7. Interfejs użytkownika 80
Rysunek 4.5: Widok okna pomocy
Zamknięcie programu w trakcie odczytu/sterowania jest niemożliwe. Jego za-
mknięcie przy pomocy menedżera zadań Windows spowoduje po jego ponownym
uruchomieniu pojawienie się błędu „ERORR SERVICE ALREADY RUNING”. Jest
to ostrzeżenie o tym, że sterownik portu LPT jest już załadowany i zarejestrowany
w systemie. Normalne zamknięcie aplikacji zamknie sterownik poprawnie.
4.7.3 Opis funkcji przycisków okna przygotowania trajektorii
Prędkość startowa — jest to prędkość od jakiej silnik rozpoczyna ruch, a także
prędkość na jakiej kończony jest ruch silnika. Komendę tę można umieszczać
w dowolnym miejscu programu sterowania. Jest ona wymagana na początku
każdego programu sterowania.
Prędkość maksymalna — jest to prędkość wykorzystywana przy wykonywaniu ko-
mendy ruchu Znajdź pozycję.
Przyśpieszenie — jest to ilość kroków wykonywana przez silnik przy zmianie pręd-
kości (np. po wydaniu komendy Stała prędkość).
Stała prędkość — komenda ta powoduje, że silnik rozpędza się od prędkości starto-
wej lub końcowej poprzedniego ruchu, do prędkości zadanej, w ilości kroków
określonej przez Przyśpieszenie. Rozkazy te mogą następować jeden po dru-
gim. Nie jest konieczne zatrzymywanie silnika pomiędzy nimi. Niemożliwa

4.7. Interfejs użytkownika 81
Rysunek 4.6: Prędkość startowa
Rysunek 4.7: Prędkość maksymalna
jest zmiana prędkości silnika na ujemną, musi to zostać poprzedzone wyha-
mowaniem silnika.
Czekaj — możliwe są dwie opcje dla tej komendy. Rozkaz ten może być wykonany
z lub bez ruchu silnika. Określany jest czas ruchu w sekundach. Jak widać na
rysunku 4.10 czas oczekiwania równy 1s przy prędkości 30 kroków/s powoduje
wygenerowanie 30 kroków. Bezpośrednio przed i za tą komendą mogą się
znaleźć dowolne rozkazy.
Hamuj — silnik hamuje od aktualnej prędkości do prędkości startowej w ilości kro-
ków określonych przez Przyśpieszenie po czym zatrzymuje się.
Zerowanie pozycji — komenda ta zeruje licznik pozycji, który jest uaktualniany
przy każdym rozkazie ruchu.
Znajdź pozycję — rozkaz ten powoduje, że silnik wykonuje następującą sekwencję
ruchów. Rozpędza się od prędkości startowej do maksymalnej, następnie po-

4.7. Interfejs użytkownika 82
Rysunek 4.8: Przyspieszenie
Rysunek 4.9: Przyspieszenie = 10 kroków Prędkość startowa = 20 kroków/sStała prędkość = 30 kroków/s
rusza się z prędkością maksymalną, a w momencie znalezienia się w odległości
równej Przyśpieszeniu od pozycji zadanej rozpoczyna hamowanie i zatrzy-
muje się na zadanej pozycji. W przypadku, gdy pozycja zadana znajduje się
bliżej niż dwie odległości Przyśpieszenia silnik osiąga prędkość maksymalną
i natychmiast zaczyna hamować. Gdy zadana pozycja jest bliżej aktualnej niż
jedna odległość Przyśpieszenia, silnik wykonuje przyśpieszanie i zatrzymuje się
na zadanej pozycji. Wykonanie tej komendy musi zostać poprzedzone zatrzy-
maniem silnika.
Ustaw licznik — komenda ta ustawia licznik programowy dzięki któremu wraz z ko-
mendą Skocz do linii można wykonywać pewne zadania w pętli.
Skocz do linii — rozkaz ten korzysta z wewnętrznego licznika programu. Po na-
potkaniu tej komendy zawartość licznika jest zmniejszana o jeden. Jeżeli nie
zostało osiągnięte zero program skacze do linii określonej jako argument roz-
kazu. Jeżeli zero zostało osiągnięte wykonywany jest rozkaz następujący po

4.7. Interfejs użytkownika 83
Rysunek 4.10: Przyspieszenie = 10 kroków Prędkość startowa = 20 kroków/sStała prędkość = 30 kroków/s Czekaj = 1s
Rysunek 4.11: Przyspieszenie = 10 kroków Prędkość startowa = 20 kroków/sStała prędkość = 30 kroków/s Czekaj = 1s
Rysunek 4.12: Przyspieszenie = 10 kroków Prędkość startowa = 10 kroków/sPrędkość maksymalna = 40 kroków/s Znajdź pozycję = 40
Skocz do linii.
Koniec — w momencie napotkania tej komendy program kończy działanie. Wszel-
kie rozkazy znajdujące po komendzie Koniec są pomijane.
Edytuj — umożliwia edycję wcześniej wprowadzanych rozkazów. Edycji podlega

4.8. Formaty plików 84
Rysunek 4.13: Przyspieszenie = 10 kroków Prędkość startowa = 10 kroków/sPrędkość maksymalna = 40 kroków/s Znajdź pozycję = 15
Rysunek 4.14: Przyspieszenie = 10 kroków Prędkość startowa = 10 kroków/sPrędkość maksymalna = 40 kroków/s Znajdź pozycję = 7
zaznaczona w oknie programu linia.
Usuń — usuwa zaznaczoną komendę.
Oblicz sterowanie i wyświetl — następuje obliczenie trajektorii na podstawie wpro-
wadzonej sekwencji rozkazów. W przypadku błędów użytkownik jest o nich
informowany odpowiednimi komunikatami. Zaznaczana jest linia, w której
prawdopodobnie znajduje się błąd.
4.8 Formaty plików
4.8.1 Plik trajektorii
Plik trajektorii posiada rozszerzenie tra. Jest on jednak plikiem tekstowym.
Zawartość pliku stanowią trzy kolumny. Pierwsza kolumna to reprezentacja rozkazu
używana wewnątrz programu ( zmienna typu enum ). Druga kolumna to tekstowe
przedstawienie rodzaju rozkazu. Trzecia to argument rozkazu. Dodatkowe dwie

4.9. Przetwarzanie danych 85
Rysunek 4.15: Przykładowa zawartość pliku trajektorii
kolumny występują dla komendy Czekaj jest to związane z tym, że przyjmuje ona
dwa argumenty.
4.8.2 Plik danych pomiarowych
Plik wynikowy zawierający zebrane dane pomiarowe jest plikiem tekstowym.
Jako pierwsze zapisywane są dane pochodzące z enkodera. Podawana jest ilość
rekordów, wypisywane są nazwy kolumn: Czas, Droga, Prędkość chwilowa, a poniżej
kolejne wartości.
Następnym elementem są dane sterowania. Podawana jest ich ilość, nazwy ko-
lumn: Czas, Droga, Prędkość, a poniżej ich wartości.
Kolejnym elementem pliku jest średnia prędkość enkodera. Dane te są umiesz-
czone na końcu pliku ponieważ ich ilość nie jest w ścisły sposób związana z ilością
próbek drogi enkodera.
4.9 Przetwarzanie danych
4.9.1 Dane sterowania
W trakcie sterowania jest odczytywany dokładny czas jego zadania. Umożliwia
to późniejsze wykreślenie rzeczywiście zadanego sterowania. Podstawową funkcją
przetwarzania danych jest obliczanie czasu wystąpienia zdarzenia. Droga sterownika
jest bezpośrednio obliczana w trakcie sterowania, natomiast czas zadania kroku
w późniejszej funkcji ObliczDrogeS.
Prędkość sterownika jest obliczana jako zmiana drogi w czasie pomiędzy każdymi
dwoma krokami sterowania.
4.9.2 Dane enkodera
Droga enkodera jest obliczana bezpośrednio w sterowniku systemowym w funk-
cji obsługi przerwania. Czas zdarzenia jest zwracany jako zmienna LARGE IN-

4.9. Przetwarzanie danych 86
Rysunek 4.16: Przykładowa zawartość pliku danych
TEGER. Wymaga to przetworzenia do zmiennej typu double. W trybie PCHost
droga enkodera jest skalowana zgodnie z ustawionym podziałem kroków, umożli-
wia to porównanie zadanej i otrzymanej trajektorii. Współczynniki skalowania są
następujące:
Tablica 4.5: Współczynnik skalowania w zależności od podziału kroku
podział 1/1 1/2 1/4 1/8 1/16 1/32wartość współczynnika 0,05 0,1 0,2 0,4 0,8 1,6
Natomiast w trybie ZD100 współczynnik skalowania wynosi 1, co umożliwia
porównanie otrzymanego wyniku z wynikami licznika MD100 firmy Wobit (przy
czym licznik ten musi pracować w trybie In2).
Przetwarzanie prędkości dla danych enkodera jest bardziej rozbudowane.
Prędkość chwilowa jest obliczana między każdymi dwoma punktami pomiaru.
Widoczne na rysunku nierównomierności są spowodowane różnymi czasami od przy-
jęcia przerwania do rozpoczęcia jego obsługi oraz nieidealnym dopasowaniem sygna-
łów A i B enkodera [34]. Prędkość średnia jest obliczana wg następującego algo-

4.9. Przetwarzanie danych 87
Rysunek 4.17: Prędkość chwilowa
rytmu:
• Na podstawie danych drogi enkodera tworzymy wektor danych do filtracji.
Jako, że próbki sygnału nie są zebrane równomiernie, uzupełniane są pośred-
nie wartości sygnału. Wektor wynikowy jest sygnałem spróbkowanym z szyb-
kością ok. 16500 próbek/s.
• Otrzymany wektor poddawany jest filtracji filtrem cyfrowym dolnoprzepusto-
wym drugiego rzędu. Jest to filtr IIR Butterwothh’a, częstotliwość graniczna
15Hz. Filtr został zaprojektowany przy wykorzystaniu pakietu Matlab
• Następnie obliczamy prędkość obliczając różnicę pomiędzy próbkami odle-
głymi o 200 pozycji (ze względu na duże zwiększenie ilości próbek w pierwszym
punkcie).
W wyniku powyższych działań otrzymujemy przybliżoną prędkość średnią silnika.

Rozdział 5
Wyniki doświadczeń
5.1 Wstęp
Doświadczenia dokonywano poprzez wykorzystanie zaprojektowanego programu
oraz liczników LP100, MD100. Do pomiarów przemieszczeń wykorzystano opto-
elektroniczny przetwornik obrotowo-impulsowy MOK40 firmy WObit, który posiada
rozdzielczość 1000 działek na obrót. Tryb zliczania impulsów przez MD100 (zlicza
zbocza narastające i opadające w pracy kwadraturowej) powoduje zwiększenie roz-
dzielczości czterokrotnie. Oprogramowanie inżynierskie również zapewnia przynaj-
mniej 4000 impulsów na 1 obrót enkodera, dzięki układowi wyzwalania przerwania
przy każdej zmianie sygnałów kanału A, B, CLK, DIR.
Można stwierdzić, że silniki krokowe są przetwornikami informacji cyfrowej na
dyskretnie zmieniające się położenie kątowe, co powoduje, że są one stosowane do
napędzania różnego rodzaju urządzeń pozycjonujących. Dlatego ważnym aspektem
doświadczeń jest zbadanie dokładności pozycjonowania silnika w różnych trybach
pracy. Analizując pracę silnika można także zaobserwować szczególne cechy stero-
wania oraz zauważyć zalety i wady badanego napędu elektrycznego.
5.2 Zadawanie trajektorii
Dzięki zastosowaniu komputera było możliwe zadawanie trajektorii, z uwzględ-
nieniem wykonania danej liczby kroków, pracy silnika z daną prędkością przez usta-
lony okres, rozpoczęcie pracy silnika z odpowiednią prędkością.
Zadano trajektorię zgodnie, z którą silnik miał pracować z prędkością stałą
50 kroków/s przez okres 5 s, z przyspieszeniem1 równym 5 kroków. Wykres po-
łożenia wirnika przedstawiono na rysunku 5.1.
1Przez przyspieszenie należy rozumieć ilość kroków jaka musi zostać wykonana, by wirnikosiągnął daną prędkość
88

5.3. Prędkość chwilowa 89
Rysunek 5.1: Wykres położenia wirnika w zadanej trajektorii
Odczytana trajektoria za pomocą enkodera do komputera zgadzała się z zadaną
trajektorią, a położenie wirnika potwierdziło dużą dokładność pozycjonowania.
5.3 Prędkość chwilowa
Przy pomocy przetwornika optoelektronicznego możliwe było zmierzenie prędko-
ści chwilowej. Silnik był załączony w trybie pracy pełnokrokowej, przy połączeniu
szeregowym z dwoma uzwojeniami. Zadano prędkość stałą równą 50 kroków/s przezokres 5 sekund. Praca silnika krokowego w zastosowanym trybie odznacza się za-
uważalnymi oscylacjami położenia wirnika.

5.3. Prędkość chwilowa 90
Rysunek 5.2: Przedstawienie prędkości chwilowej silnika w małym okresie
Na rysunku 5.2 oraz jego powiększeniu 5.3 zauważono bardzo duże wahania
prędkości chwilowej w porównaniu z zadaną prędkością. Oscylacje pokrywają się
z oscylacjami położenia wirnika. Można także zaobserwować, że prędkość chwilowa
fluktuuje wokół zadanej stałej prędkości.
Rysunek 5.3: Przedstawienie prędkości chwilowej silnika w małym okresie (po-
większenie)

5.4. Badanie przebiegów sterowania 91
5.4 Badanie przebiegów sterowania
Zadanie polegało na obserwacji przebiegów sterowania za pomocą oscyloskopu.
Badanie prądu możliwe było dzięki zastosowaniu boczników na przewodach zasi-
lających cewki silnika krokowego. Zatem obserwacja prądu była możliwa poprzez
pomiar spadków napięć na rezystancji, co potwierdza zależność:
R · i = u (5.1)
Rysunek 5.4: Zbadany przebieg sterowania na uzwojeniach silnika bipolarnego
Przebiegi zmierzone zgadzają się z teoretyczną analizą i potwierdzają przesunię-
cie o π/2rad pomiędzy dwoma kanałami sterowania. Dzięki badaniom, można byłozaobserwować także wpływ indukcyjności uzwojeń na przebieg napięcia.
5.5 Ustalanie się pozycji rotora
Zgodnie z rozdziałem 3.5.5 można stwierdzić, że podczas pracy wirnika w trybie
pełnokrokowym powstają oscylacje przy ustalaniu się położenia wirnika. Dzięki za-
stosowaniu przetwornika obrotowo-impulsowego możliwe było sczytanie dokładnych
wartości najmniejszych przemieszczeń.

5.5. Ustalanie się pozycji rotora 92
Małe prędkości silnika
Wdoświadczeniu zadano pracę przy stałej prędkości α = 10 kroków/s (3 obr/min),w szeregowym połączeniu cewek. W pierwszym trybie pracy ustawiono silnik ze
sterowaniem pełnokrokowym. Zarejestrowana trajektoria zgadzała się z zadaną, co
potwierdziło dokładność pracy i pozycjonowania. Powiększono wykres odczytów,
by móc zaobserwować ustalanie się rotora w kolejnych taktach pracy — co jest
przedstawione na rys. 5.5.
Rysunek 5.5: Ustalanie się pozycji rotora w trybie pełnokrokowym
Można zauważyć analogię do rysunku 2.21, która potwierdza duże oscylacje ro-
tora, w każdym takcie podczas pracy pełnokrokowej. Następnie ustawiono pracę sil-
nika ze sterowaniem półkrokowym, o tej samej prędkości 10 kroków/s czyli 20 mikrokroków/s.Powiększony wykres trajektorii przedstawiono na rysunku 5.6.
Rysunek 5.6: Ustalanie się pozycji rotora w trybie półkrokowym
Na podstawie powyższego rysunku można stwierdzić, że sterowanie półkrokowe

5.5. Ustalanie się pozycji rotora 93
zmniejszyło względną amplitudę oscylacji. Przetestowano silnik także w pracy mi-
krokrokowej z podziałem 116i wyniki przedstawiono na rysunku 5.7.
Rysunek 5.7: Ustalanie się pozycji rotora podczas sterowania mikrokrokowego
Praca mikrokrokowa znacznie zmniejszyła oscylacja i mimo występujących po-
jedynczych wahań, silnik nadal pracuje z dużą dokładnością.
Zwiększenie prędkości silnika
Wdoświadczeniu zadano pracę przy stałej prędkości α = 50 kroków/s (15 obr/min),w równoległym połączeniu cewek. Zarejestrowana trajektoria pozycji silnika stero-
wanego półkrokowo zgadzała się z zadaną, co potwierdziło dokładność pracy i po-
zycjonowania. Powiększono wykres odczytów, by móc zaobserwować ustalanie się
rotora w kolejnych taktach pracy — co jest przedstawione na rys. 5.8.
Rysunek 5.8: Ustalanie się pozycji rotora podczas sterowania półkrokowego przy
α = 100 mikrokroków/s

5.6. Badanie dokładności pozycjonowania 94
Oscylacje pozycji rotora wyraźnie zmniejszyły się podczas pracy silnika półkroko-
wej z większą prędkością, mimo, że silnik nie był sterowany mikrokrokowo. Następ-
nie zadano pracę silnik ze stałą prędkością α = 800 mikrokroków/s (120 obr/min).
Rysunek 5.9: Ustalanie się pozycji rotora podczas sterowania półkrokowego przy
α = 800 mikrokroków/s
Można zaobserwować, że w wyniku pracy mikrokrokowej i dużych prędkości sil-
nika, oscylacje nie występują.
Konkluzja
1. Praca mikrokrokowa wyraźnie zmniejsza amplitudę oscylacji położenia
2. Wzrost prędkości powoduje natychmiastowe przełączanie się wirnika do kolej-
nych pozycji, co także powoduje zmniejszanie się oscylacji położenia.
3. Pomimo oscylacji przy ustalaniu się pozycji rotora przy sterowaniu pełno-
krokowym i półkrokowym, skoki są precyzyjne a rotor obraca się z zadanym
kątem.
5.6 Badanie dokładności pozycjonowania
Dokonano badania dokładności pozycjonowania za pomocą liczników LP100 oraz
rejestrowaniu odczytów z przetwornika obrotowo-impulsowego. Wszystkie odczyty
zadawanych pozycji przy jakichkolwiek prędkościach, osiąganych przez hybrydowy
silnik BYG57 081D, zgadzały zgadzały się z zadanymi wartościami zarówno na
zewnętrznym liczniku tudzież na komputerze.
Nie udało się także zarejestrować histerezy pozycji spoczynkowych. Błąd po-
zycjonowania silnika podawany przez producenta wynosił 1, 8o — co odpowiadało

5.7. Propozycje ćwiczeń dla studentów 95
jednemu impulsowi sygnału enkodera. Podczas zadawania niektórych trajektorii
licznik LP100 nie zliczał 1 impulsu, lecz jednak w kolejnej trajektorii go uwzględniał
— spowodowane to było zliczaniem narastających i opadających zboczy sygnałów
przetwornika obrotowo-impulsowego.
5.7 Propozycje ćwiczeń dla studentów
Propozycje ćwiczeń dla studentów do przeprowadzenia na zbudowanym stano-
wisku do badania własności silnika krokowego:
• Zbadać połączenia uzwojeń silnika przy zmianie konfiguracji przełączników na
płytce edukacyjnej, wykorzystując pomiar rezystancji między odpowiednimi
punktami gniazda G8. Ćwiczenie wykonać pod nadzorem prowadzącego. Do
tego celu należy podłączyć uzwojenia silnika do gniazda G8 oraz załączyć
zasilanie płytki G7.
• Badanie zachowania i dynamiki pracy silnika przy zmianie konfiguracji po-
łączeń uzwojeń, wykorzystując przełączniki na płytce edukacyjnej. Pomiary
i obserwacje przeprowadzić wykorzystując oprogramowanie inżynierskie.
• Zbadać sygnały taktujące sterownik silnika krokowego pochodzący z zadajnika
oraz komputera oraz innych sygnałów sterujących.
Można przeprowadzić również pomiary opisane w powyższym rozdziale przy zmianie
mikrokroku silnika.

Rozdział 6
Zakończenie
Cel pracy określony we wstępie został osiągnięty. Stanowisko badawcze zostało
rozbudowane i obecnie umożliwia analizę systemu sterowania silnikiem krokowym
w układzie otwartym. Pierwotne urządzenia znajdujące się na stanowisku zostały
włączone do systemu.
Zbudowany układ elektroniczny — PEdASK — umożliwia, bez fizycznych zmian
w połączeniach, prowadzenie pomiarów i sterowania silnikiem w kilku konfigura-
cjach, zarówno na komputerze jak i z wykorzystaniem licznikach przemysłowych.
Umożliwia to studentowi na porównanie dedykowanego sterowania do zastosowań
przemysłowych jak i opartego na systemie komputerowym.
Opracowana aplikacja pozwala na zadanie różnych trajektorii, graficzne przed-
stawienie wyników pomiarów oraz ich archiwizację.
Wykonane pomiary potwierdziły zalety silnika krokowego (hybrydowego) jako
urządzenia umożliwiającego precyzyjne sterowanie w pętli otwartej oraz dokładność
i poprawne działanie opracowanego systemu.
Okazało się, że pomiary wykonywane na komputerze przy pomocy stworzonej
płytce edukacyjnej do analizy silnika krokowego oraz zaimplementowanego oprogra-
mowania z wykorzystaniem przerwania sprzętowego w ramach niniejszej daje jedna-
kowe wyniki jak dedykowane urządzenia przemysłowe. Dają one jednak dużo więk-
sze możliwości ze względu na edukacyjny charakter układu elektroniczengo i kom-
puterową wizualizację wyników.
Potencjalne możliwości projektu inżynierskiego — uniwersalność układu PE-
dASK, rozbudowa układu o kolejne urządzenia, możliwość przystosowania opro-
gramowania pod system operacyjny czasu rzeczywistego Linux — stanowią źródło
dalszych aspiracji i mogą stać się tematem dalszej pracy.
Integralną częścią pracy są również dodatki i załączniki — płyta CD-ROM za-
wierająca stworzone w ramach niniejszej pracy programy, aplikacje i projekty.
96

Dodatek A
Dokumentacja techniczna
A.1 Płytka drukowana PEdASK
Rysunek A.1: Rozmieszczenie elementów na płytce drukowanej PEdASK
97

A.1. Płytka drukowana PEdASK 98
Rysunek A.2: Mozaika ścieżek na płytce drukowanej PEdASK
Rysunek A.3: Połączenia łączówek na płytce drukowanej PEdASK

A.2. Wzory opisu na pleksie 99
A.2 Wzory opisu na pleksie
Rysunek A.4: Wzór wycięcia i graweru górnej części pleksy
Rysunek A.5: Wzór wycięcia dolnej części pleksy

A.3. Skrócony katalog układów scalonych wykorzystanych do budowy płytkidrukowanej PEdASK 100
A.3 Skrócony katalog układów scalonych wykorzystanych
do budowy płytki drukowanej PEdASK
Skrócony opis układów scalonych powstał w oparciu o informacje i ilustracje
z dokumentacji firmy Texas Instruments [24].
SN74HC00 — Quadruple 2-Input Positive-NAND Gate
Wejścia WyjścieA B Y
H H LL X HX L H
SN74LS05N— Hex Inverter with Open-Collector Outputs
Wejście WyjścieA Y
H LL H
SN74LS75N — 4-Bit Bistable Latch
Wejścia WyjściaD C Q Q
L H L HH H H LX L Qo Qo
Qo — stan poprzedni

A.3. Skrócony katalog układów scalonych wykorzystanych do budowy płytkidrukowanej PEdASK 101
SN74HC74 — Dual D-Type Positive-Edge-Triggered Flip-Flop with Clear and Preset
Wejścia WyjściaPRE CLR CLK D Q Q
L H X X H LH L X X L HL L X X H! H!H H ↑ H H LH H ↑ L L HH H L X Qo Qo
H! — stany niestabilne
SN74HC85N — 4-Bit Magnitude Comparator
Porównywane wejścia Operacja porównania WyjściaA3, B3 A2, B2 A1, B1 A0, B0 A>B A<B A=B A>B A<B A=B
A3>B3 X X X X X X H L LA3<B3 X X X X X X L H LA3=B3 A2>B2 X X X X X H L LA3=B3 A2<B2 X X X X X L H LA3=B3 A2=B2 A1>B1 X X X X H L LA3=B3 A2=B2 A1<B1 X X X X L H LA3=B3 A2=B2 A1=B1 A0>B0 X X X H L LA3=B3 A2=B2 A1=B1 A0<B0 X X X L H LA3=B3 A2=B2 A1=B1 A0=B0 H L L H L LA3=B3 A2=B2 A1=B1 A0=B0 L H L L H LA3=B3 A2=B2 A1=B1 A0=B0 L L H L L H
Równoległe połączenie
A3= B3 A2= B2 A1= B1 A0= B0 X X H L L HA3= B3 A2= B2 A1= B1 A0= B0 H H L L L LA3= B3 A2= B2 A1= B1 A0= B0 L L L H H L

A.3. Skrócony katalog układów scalonych wykorzystanych do budowy płytkidrukowanej PEdASK 102
SN74HC157 — Quadruple 2-Line to 1-Line Data Selector/Multiplexer
Wejścia Wyjścia
Wybór DaneG A/B A B Y
H X X X LL L L X LL L H X HL H X L LL H X H H
ULN2803A — Darlington Transistor Array [24]
PC814 — AC Input Photocoupler [24]
1 – Anoda, Katoda2 – Anoda, Katoda3 – Emiter4 – Kolektor

Literatura
[1] Podstawy obróbki CNC. Wydawnicto REA s.j., Warszawa, 1999.
[2] Circuits. [on-line] http:
//content.honeywell.com/sensing/prodinfo/solidstate/technical/mr˙chapter4.pdf,
2004.
[3] Katalog ELFA 52. ELFA Sp. z o.o., Warszawa, 2004.
[4] CNC Forum. [on-line] http://www.cnc.info.pl/, 2006.
[5] Silniki krokowe. [on-line] http://www.akcesoria.cnc.info.pl/silniki˙krokowe.htm,
2006.
[6] Kazimierz Bisztyga. Sterowanie i regulacja silników elektrycznych. Wydawnictwa
Naukowo-Techniczne, Warszawa, 1989.
[7] Maciej Bodnicki. Mikrosilniki elektryczne. Państwowe Wydawnicto Naukowe,
Warszawa, 1991.
[8] Brian W. Kernigham, Dennis M. Ritche. Język ANSI C, Klasyka Informatyki.
WNT, Warszawa, 2002.
[9] Windows Hardware Developer Center. How much time is your driver spending in
its DPCs and ISRs? [on-line]
http://www.microsoft.com/whdc/Driver/tips/DPC˙ISR.mspx, 2005.
[10] Craig Peacock. Interfacing the Standard Parrarel Port. [on-line]
http://www.senet.com.au/˜cpeacock, 1998.
[11] Piotr Górecki. Układy cyfrowe pierwsze kroki. Wydawnictwo BTC, Warszawa, 2004.
[12] Boris Alekseevic Ivobotenko. Dyskretne napędy elektryczne z silnikami skokowymi.
Wydawnictwa Naukowo-Techniczne, Warszawa, 1975.
[13] Tams Kroly. Exchange data between device drivers and user applications. [on-line]
http://www.codeproject.com/system/KernelToUserMode.asp, 2005.
[14] Microsoft. KeQueryPerformanceCounter. Microsoft Windows Driver Development
Kit Introduction, 2005.
103

104
[15] Toby Opferman. Driver Development Part 1: Introduction to Drivers. [on-line]
http://www.codeproject.com/system/driverdev.asp, 2005.
[16] Toby Opferman. Driver Development Part 2: Introduction to Implementing
IOCTLs. [on-line] http://www.codeproject.com/system/driverdev2.asp, 2005.
[17] Craig Peacock. Interfacing the Standard Parallel Port. [on-line]
http://www.beyondlogic.org/spp/parallel.htm, 2005.
[18] Craig Peacock. PortTalk - A Windows NT I/O Port Device Driver. [on-line]
http://www.beyondlogic.org/porttalk/porttalk.htm, 2005.
[19] Leszek Potocki. Silniki krokowe od podstaw. Elektronika dla Wszystkich.
AVT-Korporacja, Warszawa, 2002.
[20] Stephen Prata. Szkoła programowania, język C++. Wydawnictwo Robomatic,
Wrocław, 2003.
[21] Ryszard Sochocki. Mikromaszyny elektryczne. Oficyna Wydawnicza Politechniki
Warszawskiej, Warszawa, 1996.
[22] Tomasz Starecki. Mikrokontrolery 8051 w praktyce. Wydawnictwo BTC, Warszawa,
2002.
[23] Bjarne Stroustrup. Język C++, Klasyka Informatyki. WNT, Warszawa, 2002.
[24] Texas Instruments. [on-line] http://www.ti.com, 2006.
[25] Dr. Ir. Martin Timmerman. Windows NT as Real-Time OS? [on-line]
http://www.dedicated-systems.com/magazine/97q2/winntasrtos.htm, 2005.
[26] Witold Ober, WObit. Zasilacze silników krokowych ZNXXXL. [on-line]
http://www.wobit.com.pl, 2002.
[27] Witold Ober, WObit. Instrukcja obsługi SMC81 — Sterownik silników krokowych
bipolarnych dwufazowych. [on-line] http://www.wobit.com.pl, 2003.
[28] Witold Ober, WObit. Instrukcja obsługi Zadajnik ZD 100 z programem WINSMC.
[on-line] http://www.wobit.com.pl, 2003.
[29] Witold Ober, WObit. Optoelektroniczny przetwornik obrotowo-impulsowy, seria
mok40. [on-line] http://www.wobit.com.pl, 2003.
[30] Witold Ober, WObit. Przetworniki optoelektroniczne. [on-line]
http://www.enkodery.com, 2003.
[31] Witold Ober, WObit. Silniki krokowe, seria 57BYG. [on-line]
http://www.wobit.com.pl, 2003.
105
[32] Witold Ober, WObit. Licznik jednoosiowy z opcją łącza szeregowego, MD100.
[on-line] http://www.wobit.com.pl, 2004.
[33] Witold Ober, WObit. Uniwersalny licznik prędkości LP100. [on-line]
http://www.wobit.com.pl, 2004.
[34] Witold Ober, WObit. Mok40. [on-line]
http://www.wobit.com.pl/download/pdf/przetworniki/mok40.pdf, 2005.
[35] Witold Ober, WObit. Podstawy teoretyczne. [on-line]
http://www.wobit.com.pl/download/pdf/silniki/podstawowe%20informacje.pdf,
2006.
[36] Andrzej Zalewski. Programowanie w językach C i C++ z wykorzystaniem pakietu
Borland C++. Wydaw. NAKOM, Poznań, 2003.

© 2007 Anna CieśnikDawid JasiakŁukasz Szulc
Katedra Inżynierii Komputerowej, Wydział Informatyki i Zarzą-dzaniaPolitechnika Poznańska
Skład przy użyciu systemu LATEX i czcionki Computer Modern.
BibTEX:@mastersthesis key,author = ”Anna Cieśnik
Dawid JasiakŁukasz Szulc”,title = ”System sterowania silnikiem krokowym w układzie otwartym”,school = ”Poznan University of Technology”,address = ”Pozna\’n, Poland”,year = ”2007”,