stato di tensione e di deformazione - politecnico di...
TRANSCRIPT

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 1
Stato di tensione e di deformazione
2
Stato di deformazione
Cinematica deformabile nel pianoCinematica deformabile nello spazioCinematica della rotazione rigida localeCinematica della deformazione pura localeSintesi di rotazione e deformazioneDirezioni principali Allungamento e rotazione Complementi: cinematica del corpo rigidoComplementi: moto rigido, asse di MozziComplementi: misure di allungamento

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 2
Stato di deformazione
4
Campo di spostamenti (1/3)
PdP +P
Assi di riferimento 1,2,3Coordinate Xi =(X1, X2, X3) del punto prima dell’applicazione di , campo di spostamento,al punto
u
P
Coordinate xi =(x1, x2, x3) del punto dopol’applicazione di , campo di spostamentoPunto e punto a distanza infinitesima ( )P+dPP
uPd
P
u

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 3
5
Per meglio precisare i termini nel piano
Xi → coordinate di un punto prima di xi → coordinate di ⇒ dopo
Pπ
uuP
Campo di spostamenti (2/3)
X2
Xi
x2
X1 , x1
xiPdP +
P
udu +π+π d
u
π
6
{ } { } { } udPdddudXdx +=π↔+=
{ } { } { } { } { } { }uPududPPd
uXduudXXxdxx
−−+++=π−π+π
−−+++=−+
Campo di spostamenti (3/3)
X2
Xi
x2
X1 , x1
xi
P
udu +π+π d π
uPdP +

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 4
7
Se si sottrae la traslazione si mettono in evidenzarotazioni e variazioni di lunghezza: triangolo ( ,
, )
u
ud πdPd
X2x2
X1 , x1
PdP +
P
uud
πd
Pd
πd
Spostamenti relativi (1/4)
8
Se si sottrae si mettono in evidenza le relazioni tra gli spostamenti: triangolo ( , , ) …
Pd
X2x2
X1 , x1
PdP +
P
u
ud
πd
Pd
udu +ud
u udu + ud
Spostamenti relativi (2/4)
…moto di P+dP relativo al punto di origine P

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 5
9
Nel moto nel piano si possono distinguere:
X2x2
X1 , x1
rotazione
PdP +
P
ud
πd
Pd
variazionedi lunghezza
Spostamenti relativi (3/4)
10
La teoria viene sviluppata per :1Xdud<<
X2x2
rotazione
PdP +
P
ud
πd
XdPd ≡
variazionedi lunghezza
X1 , x1
o meglio, , infinitesima del 1° ordine0Xdud→
Spostamenti relativi (4/4)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 6
Stato di deformazione
12
Spostamenti relativi (1/2)
A noi però non interessa il comportamentodel singolo segmento, ma il comportamentodi tutti i segmenti infinitesimi originati dal
medesimo punto

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 7
13
dX3
dX1
dX2
Le componenti di :
PdP +Xd
du3
du1du2
ud
P
Xd
X2
X1
X3
Spostamenti relativi (2/2)
14
33
1 dXX
u
∂
∂
11
1 dXX
u
∂
∂2
2
1 dXXu
∂∂
Le componenti di :1du
du1
PX2
X1
X3
Tensore dei gradienti di spostamento (1/7)
du3
du1du2

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 8
15
33
2 dXX
u
∂
∂
11
2 dXX
u
∂
∂
22
2 dXXu∂∂
P
du3
du1 du2
Le componenti di :2du
X2
X1
X3
Tensore dei gradienti di spostamento (2/7)
16
33
3 dXX
u
∂
∂
11
3 dXX
u
∂
∂
22
3 dXXu∂∂
du3
du1 du2
Le componenti di :3du
PX2
X1
X3
Tensore dei gradienti di spostamento (3/7)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 9
17
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
3
3
2
3
1
33
2
2
2
1
23
1
2
1
1
1
3
2
1
dXdXdX
Xu
Xu
Xu
Xu
Xu
Xu
Xu
Xu
Xu
dududu
Tensore dei gradienti di spostamento (4/7)
matrice del tensore dei gradienti di spostamento …
Moto di P+dP relativo al punto di origine P (quindi a meno della traslazione di P):u
18
…dove ogni riga corrisponde ad una delle figure precedenti. In particolare ogni riga:
contiene gli elementi che compongono:
⎥⎦
⎤⎢⎣
⎡∂∂
∂∂
∂∂
3
1
2
1
1
1Xu
Xu
Xu
33
1 dXX
u
∂
∂
11
1 dXX
u
∂
∂2
2
1 dXXu
∂∂
P
Tensore dei gradienti di spostamento (5/7)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 10
19
Mentre per il significato, ad esempio, della seconda colonna si veda la seguente figura:
Tensore dei gradienti di spostamento (6/7)
P
22
3 dXXu∂∂
22
2 dXXu∂∂
22
1 dXXu
∂∂
X2
X1
X3
20
Tensore dei gradienti di spostamento (7/7)
{ } { }dXdXdu
dXdXdX
Xu
Xu
Xu
Xu
Xu
Xu
Xu
Xu
Xu
dududu
duk
i
3
2
1
3
3
2
3
1
33
2
2
2
1
23
1
2
1
1
1
3
2
1
⎥⎦
⎤⎢⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
implica che se ⇒ . Inoltre:1Xdud<<1
Xu
k
i <<∂∂
{ } { } { } [ ] { }dXXu
1dXXu
dXdxk
i
k
i ⋅⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡∂∂
+=⎥⎦
⎤⎢⎣
⎡∂∂
+=

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 11
21
I termini sulla diagonale principale rappresentanouna variazione di lunghezza; infatti, ad esempio, la lunghezza del segmentodiventa, dopo la trasformazione, la lunghezza di:
{ } { }T2T 0,dX,0dX =
2
2
32
2
2
1
2
3
3
2
3
1
33
2
2
2
1
23
1
2
1
1
1
2 dX
Xu
Xu
1
Xu
0dX0
Xu
Xu
Xu
Xu
Xu
Xu
Xu
Xu
Xu
0dX0
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+
∂∂
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
Allungamento (1/2)
22
…il cui modulo è:
P
22
3 dXXu∂∂
22
2 dXXu
1 ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+
22
1 dXXu
∂∂
⎥⎦
⎤⎢⎣
⎡∂∂
+⋅≅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+ ∑2
22
S.O.I
k
2
2
k
2
22 X
u1dX
Xu
Xu
21dX
X2X1
X3
Allungamento (2/2)
Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 12
Stato di deformazione
24
PX2
X1
X3
I termini fuori della diagonale principale rappresentano rotazioni; si definirà ora la rotazione rigida
Tensore della rotazione rigida (1/10)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 13
25
Condizioni:1 - affinché il moto sia rigido, segmenti presi su
una qualsiasi direzione uscente da un punto non devono cambiare lunghezza
2 - coppie di segmenti non devono cambiare l’angolo relativo, cosa che garantisce l’invarianza della distanza fra due punti qualsiasi presi nel volume
Tensore della rotazione rigida (2/10)
26
Condizione 1: nell’intorno del punto , i segmenti sui tre assi cartesiani devono subire spostamenti infinitesimi ortogonali agli assi
dX1 dX2
P321 X,X,X
dX3
P X2
X1
X3
Tensore della rotazione rigida (3/10)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 14
27
… quindi, ad esempio, il segmentosi trasforma tramite i soli spostamenti:
{ }T2 0,dX,0
dX1
dX2
dX3
P
22
3 dXXu∂∂
22
1 dXXu
∂∂
0dXXu
22
2 =∂∂
X2
X1
X3
Tensore della rotazione rigida (4/10)
28
In generale, i segmenti sui tre assi si trasformano come segue, indicando per semplicitàdi notazione gli angoli , con: ikϕ
iik
k
u
X
∂ϕ =
∂
dX1
dX2
dX3
P32 2dXϕ
12 2dXϕ
23 3dXϕ13 3dXϕ
21 1dXϕ
31 1dXϕ X2
X1
X3
Tensore della rotazione rigida (5/10)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 15
29
Il vettore iniziale: { } { }T321T dX,dX,dXdX =
diventa: { } { }T321T dx,dx,dxdx =
ovvero:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ϕϕϕϕϕϕ
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
3231
2321
1312
3
2
1
3
2
1
dXdXdX
00
0
dXdXdX
dxdxdx
Questo non definisce ancora una rotazione rigidaOccorre che (condizione 2) due direzioni qualsiasi ruotino senza cambiare l’angolo relativo
Tensore della rotazione rigida (6/10)
30
Affinché due direzioni qualsiasi ruotino senza cambiare l’angolo relativo, è necessario innanzitutto che segmenti posti sugli assi restino ortogonali dopo l’applicazione del campo degli spostamenti
{ } { } 1
31
211
1
1 dX1
dx00
dXdX ⋅
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ϕϕ=→
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
{ } { } 2
32
12
222 dX1dx0
dX0
dX ⋅⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ϕ
ϕ=→
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
Tensore della rotazione rigida (7/10)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 16
31
Ovvero:
E in generale:
{ } { } ( ) 21323121122T1 dXdXdxdx0 ⋅⋅ϕϕ+ϕ+ϕ==
( ) 212112 dXdXS.O.I ⋅⋅+ϕ+ϕ≅
2112 ϕ−=ϕ
kiik ϕ−=ϕ
L’ortogonalità implica nullità del prodotto scalare:
Tensore della rotazione rigida (8/10)
32
Tenendo conto delle convenzioni usuali sugli angoli, si assegnano i nomi:
321 ω=ϕ
213 ω=ϕ
132 ω=ϕ13ϕ
32ϕ
21ϕ
X2
X1
X3
Tensore della rotazione rigida (9/10)
P

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 17
33
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ωω−ω−ωωω−
+⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
12
13
23
3
2
1
dXdXdX
00
0
100010001
dxdxdx
la matrice a destra, antisimmetrica, contiene angoli che forniscono gli spostamenti della rotazione rigida dei tre assi cartesiani: tensore della rotazione rigida
Perciò:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ϕϕϕϕϕϕ
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
3231
2321
1312
3
2
1
3
2
1
dXdXdX
00
0
dXdXdX
dxdxdx
Tensore della rotazione rigida (10/10)
34
{ } { }21 dXedX
Si dimostra ora che ciò è sufficiente per la rotazione rigida di qualsiasi segmento per ; infatti dati due segmenti:
il prodotto scalare:
{ } [ ] [ ][ ] { }{ } [ ] [ ][ ] { }22
11
dX1dx
dX1dx
ω+=
ω+=
{ } { } { } [ ] [ ][ ] [ ] [ ][ ] { }
{ } [ ] [ ] [ ] [ ] [ ][ ]{ }
{ } { }1T2
1TTT
2
1TT
22T1
dXdX
dX1dX
dX11dXdxdx
=
=ωω+ω+ω+=
=ω+ω+=
0 I.O.S.
Rotazione rigida del volume locale (1/2)
P
Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 18
35
Il fatto che:
per qualsiasi scelta di implica che non è variato il modulo:
né è variato l’angolo:
{ } { } { } { }1T22
T1 dXdXdxdx =
{ } { }1T2 dXdX
{ } { } { } { } { } { }( )1T11
T112 dXdXdxdx,dXdXper ==
{ } { }( )12 dXdXprenderebasta =
Rotazione rigida del volume locale (2/2)
C.V.D
36
Due successive rotazioni rigide:
Calcoliamo questo prodotto trascurando gli infinitesimi di ordine superiore:
[ ] [ ]'1 ω+[ ] [ ]''1 ω+
Prima:Seconda:Ovvero:
[ ] [ ] [ ][ ] { }dX'''1 ω+ω+
[ ] [ ][ ] [ ] [ ][ ] { }dX'1''1 ω+⋅ω+
La rotazione è un vettore (1/5)
Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 19
37
valida per le rotazioni infinitesime, e quindi, dividendoper il tempo, anche per le velocità angolari
In conclusione, l’applicazione delle due rotazioni successive è commutativa, e a meno di infinitesimi di ordine superiore, le rotazioni sono additive; la:
[ ] [ ] [ ]'''1 ω+ω+
è la matrice della rotazione rigida complessiva
Allora vale la proprietà commutativa:
[ ] [ ][ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ][ ]''1'1'1''1 ω+ω+=ω+ω+
La rotazione è un vettore (2/5)
38
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ωωω
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
12
13
23
3
2
1
0dXdXdX0dXdXdX0
dududu
Questo suggerisce il carattere vettoriale di ω⎡ ⎤⎣ ⎦
Si noti che al posto di:
si potrebbe anche scrivere:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ωω−ω−ωωω−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
12
13
23
3
2
1
dXdXdX
00
0
dududu
La rotazione è un vettore (3/5)
Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 20
39
La rotazione è un vettore (4/5)
{ } [ ]{ } [ ]{ } ω∧−≡ω−=∧ω≡ω= XddXXddXdu
{ } { }{ }
{ }du prodottotrasformazionedu "esterno" tensoriale
dx dX ω dX dx dX ω dX− = ⇒ − = ∧⎡ ⎤⎣ ⎦
In conclusione, la commutatività, l’additività e il fatto che nella matrice di rotazione rigida compaiano solo tre componenti angolari, consentono di dare al tensore della rotazione rigida un carattere vettoriale. Da qui nasce il vettore della rotazione , che trasforma un segmento fornendo gli spostamenti relativi alla sua origine:
{ } XddX ≡ω
40
13ϕ
32ϕ
21ϕ
X2
X1
X3
1ω 2ω
3ω
La rotazione è un vettore (5/5)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 21
41
Il prodotto scalare di su è:, ovvero:
Direzione dello spostamento (1/4)
{ } [ ]{ }dXdu ω= { }dX{ } [ ]{ }dXdX T ω
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ωω−ω−ωωω−
⎭⎬⎫
⎩⎨⎧
ω−
ω
ω+
+ω−
ω−
−ω
00
0
dX
dX
dX
dX
dX
dX
12
13
23
21
12
31
13
32
23{ }321 dXdXdX
42
Direzione dello spostamento (2/4)
quindi ortogonalità!
⎭⎬⎫
⎩⎨⎧
ω−
ω
ω+
+ω−
ω−
−ω
21
12
31
13
32
23
dX
dX
dX
dX
dX
dX
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
dXdXdX
( )0
Cioè si ritrova che lo spostamento di è ortogonale a . Più in generale,il prodotto è ortogonale a
{ }dX{ }Xd{ } [ ]{ }dXdu ω=
[ ]{ }dXω { }dX

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 22
43
Il prodotto scalare di su è:; il prodotto :
{ } [ ]{ }dXdu ω= { }ω{ } [ ]{ }dXT ωω
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ωω−ω−ωωω−
⎭⎬⎫
⎩⎨⎧
ωω−
ωω
ωω+
+ωω−
ωω−
−ωω
00
0
12
13
23
21
12
31
13
32
23{ }321 ωωω
{ } [ ]ωω T
cioè: . Pertanto , ovvero,è ortogonale a
{ }000 { } [ ]{ } 0dXT =ωω{ } [ ]{ }dXdu ω= { }ω
Direzione dello spostamento (3/4)
44
In conclusione:
è ortogonale a , [ ]{ }dXω { }dX
è ortogonale a ,
quindi è ortogonale al piano definito da e
[ ]{ }dXω { }ω
{ }dX { }ω
{ }ω
[ ]{ }dXω
{ }dXP
Direzione dello spostamento (4/4)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 23
45
Inoltre: si verifichi che , cioè che applicarela rotazione a un vettore parallelo a stessa:
[ ] { }( )ωλω[ ]ω { }ω[ ] { }( ) [ ]{ } { }0=ωωλ=ωλω
{ }ω
{ }dX{ }tdX
Quindi, nel piano ( , ) la componente di
ortogonale a , , è la sola a fornire prodotto
non nullo,
{ }dX { }ω { }dX
{ }ω { }tdX
[ ]{ } [ ] { } { }( ) [ ]{ }tt dXdXdXdX ω=+ω=ω ω
{ }ωdX
Valore dello spostamento (1/3)
46
In assi (a,b,c), tali che stia su “a” e su “b”:{ }ω { }tdX
{ }ω
{ }dX { }tdX
a
b
[ ]{ }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ωω−=ω
t
tdX00
0dX0
0000
000dX
Valore dello spostamento (2/3)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 24
47
{ }ω
{ }t
0dX 0
dX
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎡ ⎤ = ⎨ ⎬⎣ ⎦ ⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
ωω{ }dX
P { }tdXa
b
c
In vista assonometrica:
Valore dello spostamento (3/3)
Stato di deformazione
Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 25
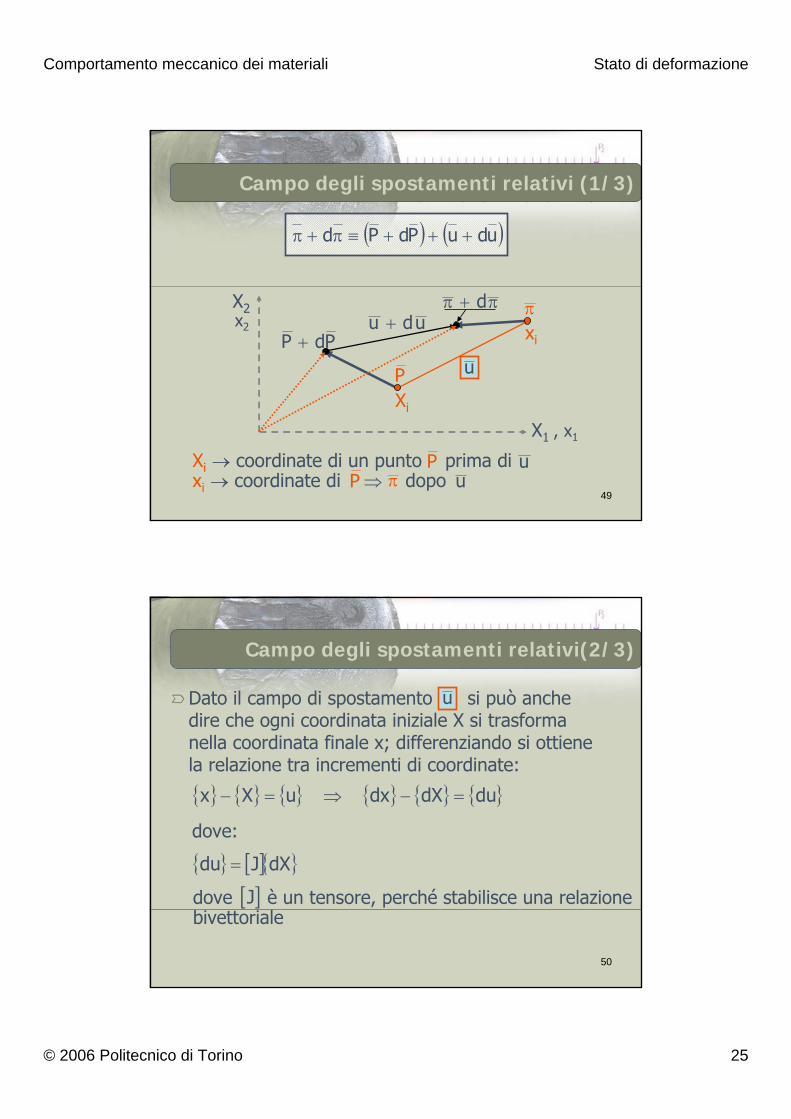
49
Xi → coordinate di un punto prima di xi → coordinate di ⇒ dopo
Pπ
uuP
Campo degli spostamenti relativi (1/3)
X2
Xi
x2
X1 , x1
xiPdP +
P
udu +π+π d
u
π
( ) ( )uduPdPd +++≡π+π
50
{ } { } { } { } { } { }dudXdxuXx =−⇒=−
Dato il campo di spostamento si può anche dire che ogni coordinata iniziale X si trasforma nella coordinata finale x; differenziando si ottiene la relazione tra incrementi di coordinate:
u
{ } [ ]{ }dXJdu =
dove è un tensore, perché stabilisce una relazionebivettoriale
[ ]J
dove:
Campo degli spostamenti relativi(2/3)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 26
51
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
3
3
2
3
1
33
2
2
2
1
23
1
2
1
1
1
3
2
1
dXdXdX
Xu
Xu
Xu
Xu
Xu
Xu
Xu
Xu
Xu
dududu
Campo degli spostamenti relativi(3/3)
matrice del tensore dei gradienti di spostamento
: moto di P+dP relativo al punto di P (quindi a meno della traslazione di P):u{ }du
52
È sempre possibile assoggettare un tensore alla seguente trasformazione:
(salvo naturalmente interrogarsi sul suo significato fisico)
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ]
[ ] [ ][ ]antisimm
T
simm
T
TT
J21J
21J
21J
21
J21
J21
J21
J21
J
−++
=−++=
0
Decomposizione del campo

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 27
53
Dove la parte antisimmetrica:
ha la struttura della matrice di rotazione rigida; viene indicata con il simbolo …
1 2
2 1
2 1
1 2
1 u u0 ......
2 X X
1 u uantisimm 0 ......
2 X X
...... ...... 0
⎡ ⎤⎛ ⎞∂ ∂ ⎟⎜⎢ ⎥− ⎟⎜ ⎟⎢ ⎥⎟⎜ ∂ ∂⎝ ⎠⎢ ⎥⎢ ⎥⎛ ⎞∂ ∂⎢ ⎥⎟⎜⎡ ⎤ = − ⎟⎜⎢ ⎥⎣ ⎦ ⎟⎟⎜ ∂ ∂⎝ ⎠⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
[ ]ω
Rotazione rigida (1/3)
54
dX1
dX2
dX3
P
12
2
udX
X∂∂
X2
X1
X3
21
1
udX
X∂∂
… in quanto, ad esempio, le componenti sul piano 1-2 nascono da:
Rotazione rigida (2/3)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 28
55
3ω
… e in:producono la componente della rotazione rigida
[ ] { }dXω
dX1
dX2
dX3
PX2
X1
X3
1
2
u(
X∂
−∂
2
1
u)
X∂∂ 2dX
21
2
1
u(
X∂
−∂
1
2
u)
X∂∂ 1dX
21
3ω
Rotazione rigida (3/3)
56
La parte antisimmetrica ci è, quindi, già nota.La parte simmetrica:
viene indicata con il simbolo:
1 1 2
1 2 1
1 2 2
2 1 2
3
3
u 1 u u......
X 2 X X
1 u u usimm ......
2 X X X
u...... ......
X
⎡ ⎤⎛ ⎞∂ ∂ ∂ ⎟⎜⎢ ⎥+ ⎟⎜ ⎟⎢ ⎥⎟⎜∂ ∂ ∂⎝ ⎠⎢ ⎥⎢ ⎥⎛ ⎞∂ ∂ ∂⎢ ⎥⎟⎜⎡ ⎤ = + ⎟⎜⎢ ⎥⎣ ⎦ ⎟⎟⎜ ∂ ∂ ∂⎝ ⎠⎢ ⎥⎢ ⎥
∂⎢ ⎥⎢ ⎥
∂⎢ ⎥⎣ ⎦
Deformazione (1/3)
[ ]ε
Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 29
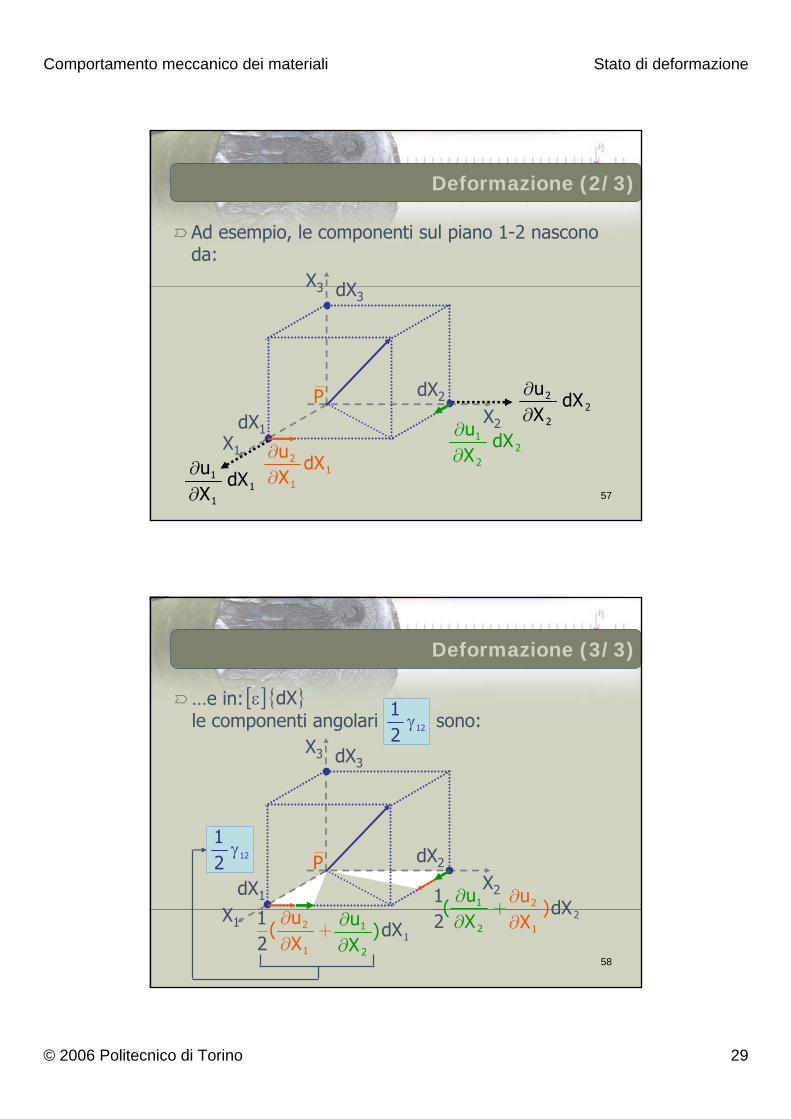
57
dX1
dX2
dX3
P 22
2
udX
X∂∂X2
X1
X3
Ad esempio, le componenti sul piano 1-2 nascono da:
12
2
udX
X∂∂2
11
udX
X∂∂1
11
udX
X∂∂
Deformazione (2/3)
58
…e in:le componenti angolari sono:
[ ] { }dXε
dX1
dX2
dX3
PX2
X1
X3
1
2
u(
X∂
+∂
2
1
u)
X∂∂ 2dX
21
2
1
u(
X∂
+∂
1
2
u)
X∂∂ 1dX
21
Deformazione (3/3)
12
12γ
12
12γ

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 30
Stato di deformazione
60
La teoria viene sviluppata per ⇒1Xdud<< 1
Xu
k
i <<∂∂
Riassumendo
essendo antisimmetrica rappresenta la “rotazione rigida”
[ ]ω
per differenza rappresenta una “deformazione pura”
[ ]ε
Sintesi di rotazione e deformazione (1/3)
La “deformazione pura”, o semplicemente deformazione” significa una variazione di forma senza una rotazione rigida “media”

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 31
61
Osservando, per semplicità il solo piano ( ),il moto locale più generale è sempre somma di una rotazione rigida e una deformazione:
21 X,X
X2x2
X1 , x1
3ω
= + P P P
Sintesi di rotazione e deformazione (2/3)
12
12γ
62
11 12 13
12 22 23
13 23 33
1 12 2
1 12 21 12 2
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤ = ⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
ε γ γ
ε γ ε γ
γ γ ε
Riassumendo, il tensore della deformazione pura
iii
i
j kjk
k j
dudXdu dudX dX
=
= +
ε
γ
perché si vuole dare rilievo alla variazione totale dell’angolo interno
21
Sintesi di rotazione e deformazione (3/3)
..90 γ−
.... 21γ=ϕ

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 32
63X1
Nota 1
I moti di rotazione e deformazione sono moti (assunti ora come infinitesimi) relativi al punto P, che può essere dotato di uno spostamentoqualsiasi, infinitesimo o finito:
{ }u
O
X3
X2
P
{ }u
P
64
Se si assume che i gradienti:
Nota 2
1Xu
k
i <<∂∂
i moti di rotazione e deformazione sono ambeduemoti infinitesimi relativi al punto P; si possono però avere rotazioni finite e deformazioni infinitesime:X2x2
X1 , x1P P P
= +

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 33
Stato di deformazione
66
Rispetto a un osservatore che trasli di con il punto P, e che ruoti rigidamente di con l’elemento infinitesimo dei materia, la parte di spostamento relativo determinato dalla sola deformazione pura:
ha, data la simmetria del tensore , sempre tre direzioni principali…
{ } [ ] { }dXdu ⋅ε=
u[ ]ω
[ ]ε
Esistenza delle direzioni principali (1/4)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 34
67
Xd
ud
X2x2
P
X1 , x1
{ } [ ] { } { }dXdXdu λ=⋅ε=
[ ] [ ][ ]{ } { }0dX1 =λ−ε
…che si trovano imponendo il parallelismo tra e :
udXd
Esistenza delle direzioni principali (2/4)
68
che ammette tre autovalori reali e tre autovettori fra loro ortogonali per via della simmetria di [ ]εEsiste allora una terna cartesiana i cui segmenti materiali posti sugli assi si limitano a cambiare di lunghezza, ma non si spostano(Ecco il senso della “rotazione rigida nulla”)
Questi assi sono gli assi principali delladeformazione
[ ] [ ][ ] 01det =λ−ε…e da quest’ultima:
Esistenza delle direzioni principali (3/4)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 35
69
X2x2
X1 , x1
1
2
In assi principali (1,2):
Esistenza delle direzioni principali (4/4)
Stato di deformazione

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 36
71
Indipendentemente dagli assi di riferimento, indicato con il versore che dà la direzione del segmento :
dXnε
dXnϕ≅
xd
Xd
ud
n
n
in un piano individuato dai vettori e : xdXdXd
nϕ
P
Allungamento e rotazione: definizioni
72
dXnε
dXnϕ≅
xd
Xd
n
nϕ
( )
( ) .S.O.IdimenoadXdX
)1(dX
tg)1(dX
nnnn
nn
nn
ϕ≅ϕε+ϕ=
=ϕε+≅
=ϕε+=
P
Approssimazioni della rotazione

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 37
73
dXnε
dXnϕ
xd
Xd
ud
n
{ } [ ] { } { } [ ] { }nnndX
dX TT
n ε=⋅ε=ε
A) { } { } { } [ ] { }ndXndunuddX TTn ε==⋅=ε
P
Calcolo di allungamento e rotazione(1/3)
74
dXnε
dXnϕ
xd
Xd
ud
n
B) ( ) ( ) 22n
2n uddXdX =⋅ϕ+⋅ε
{ } [ ] [ ] { }
{ } [ ] [ ] { }nn
dX
dXdX
dX
ud
T
2
T
2
22
n2
n
εε=
=εε
==ϕ+ε
P
Calcolo di allungamento e rotazione(2/3)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 38
75
La struttura è uguale a quella vista per le tensioni in coordinate principali:nn,,t τσ
233
222
211n nnn ⋅ε+⋅ε+⋅ε=ε
233
222
211
2n
2n nnn ⋅ε+⋅ε+⋅ε=ϕ+ε
23
22
21 nnn1 ++=
da cui, come più in generale per tutte le forme quadratiche, si deducono le proprietà già studiate e visualizzate tramite i cerchi di Mohr
Calcolo di allungamento e rotazione(3/3)
Stato di deformazione

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 39
77
dX1
dX2
dX3
P
2122
3 dXdXXu
ω=∂∂
X2
=ω=∂∂
12
3Xu
costante
Se il corpo è tutto rigido, le rette ruotano rigidamente, le rotazioni locali sono costanti e uguali ovunque:
Rotazione del corpo rigido (1/2)
78
…allora:
cioè basta ingrandire tutto proporzionalmente epassare al finito:
{ } { } [ ]{ } 'PPX;XXx =∆∆ω=∆−∆
{ }X∆
{ }ω
[ ]{ }X∆ω
P
P’
21X
21X
21X
22
3 XdXdXdXXu
∆ω=ω=ω≡∂∂
∫∫∫∆∆∆
Rotazione del corpo rigido (2/2)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 40
79
Quando succede che un vettore resti parallelo a se stesso?
implica: [ ] [ ][ ] { } [ ]{ }X1X1 ∆λ=∆⋅ω+
( ) ( ) ( )[ ] 011 23
22
21
2 =ω+ω+ω+λ−λ−
01
11
det
12
13
23=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
λ−ωω−ω−λ−ωωω−λ−
ovvero:
{ } { } [ ]{ } { }XXXx ∆λ=∆ω+∆=∆
Autovalori della rotazione rigida (1/3)
80
quindi , unica radice reale,
perché:
non ammette mai radici reali; per questa:
⇒=λ− 01 λ=1
( ) ( )23
22
21
21 ω+ω+ω−=λ−
…la cui soluzione è ovviamente:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∆∆∆
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ωω−ω−ωωω−
000
XXX
00
0
3
2
1
12
13
23
Autovalori della rotazione rigida (2/3)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 41
81
Che è soddisfatta solo quando è parallelo a { }X∆ { }ω
{ }X∆{ }ω [ ]{ } 0X =∆ωP
P’
Autovalori della rotazione rigida (3/3)
82
Se le rotazioni infinitesime in vengono diviseper il tempo dt in cui hanno luogo, assume ilsignificato di velocità angolare, e il significato di velocità lineare
{ }ω{ }ω
{ }{ }X∆ω
Procedendo in questo modo si ritrovano perl’applicazione di a tutte le proprietàcinematiche del prodotto vettoriale cioè la cinematica del corpo rigido
[ ]ω { }X∆X∆∧ω
Spostamenti e velocità angolari
Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 42
Stato di deformazione
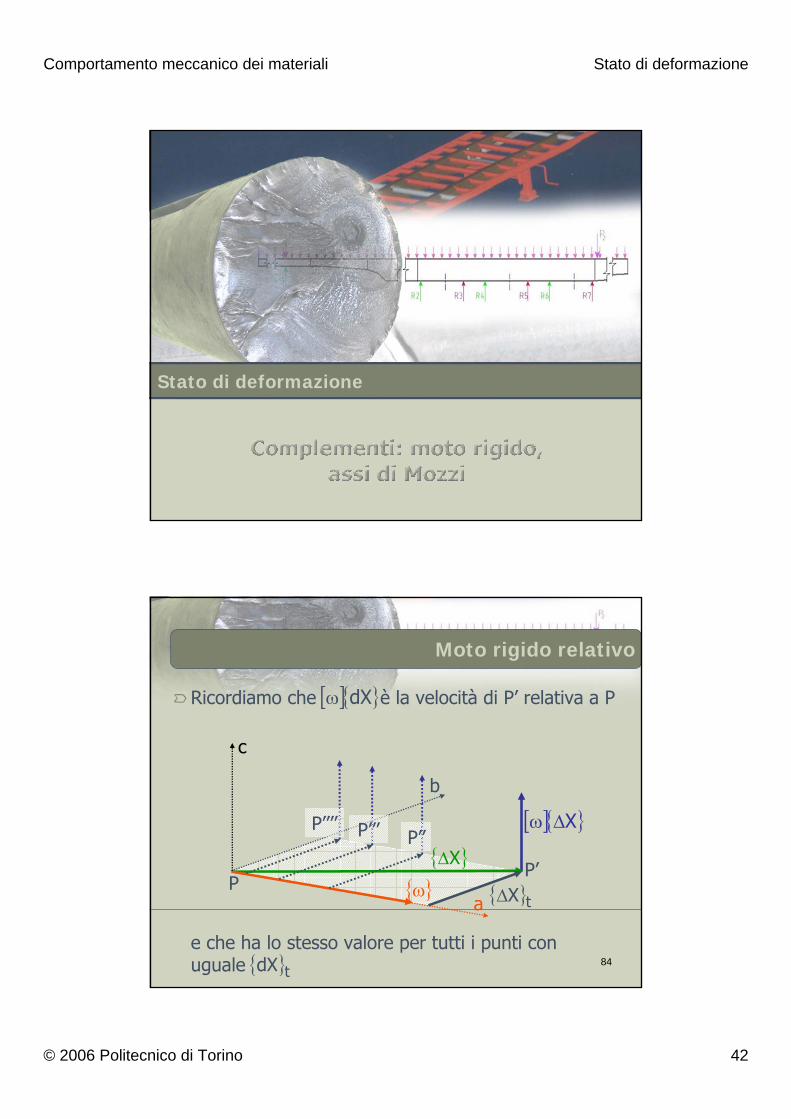
84
Ricordiamo che è la velocità di P’ relativa a P
e che ha lo stesso valore per tutti i punti con uguale
[ ]{ }dXω
{ }ω
[ ]{ }X∆ω
{ }X∆P { }tX∆a
b
c
P’
P’’P’’’P’’’’
{ }tdX
Moto rigido relativo

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 43
85
Se è data anche la velocità di P, , di componentesecondo l’asse e sul piano (b,c):
Pv
[ ]{ }X∆ω
{ }X∆P { }tX∆
b
c
P’
Pv
il moto totale di P’ è: [ ]{ }Xvv P'P ∆ω+=
a,Pv
bc,Pv
a,Pv { }ω bc,Pv
{ }ωa
Moto rigido totale
86
c
bbc,Pv
{ }tX∆
In vista sul piano parallelo al piano (b,c) e passante per P’:
P’
[ ]{ }X∆ω [ ]{ }tX∆ω=
Determinazione dell’asse di Mozzi (1/4)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 44
87
{ }tX∆
Tutti i punti P’’ a distanzacostante da P hanno
uguale modulo della velocità
c
bP’{ }tX∆P
p
p
P’’
{ }tX∆
[ ]{ }X∆ω [ ]{ }tX∆ω=
[ ]{ }tX∆ω
pp asse di PP’’
Determinazione dell’asse di Mozzi (2/4)
88
Tutti i punti di un asse per M, e parallelo all’asse “a” di , hanno nulla la velocità parallela al piano (b,c):
ω
+− bc,Pv bc,Pv
c
b
bc,Pv
P’
bc,Pv−
bc,Pv
{ }tX∆
M
{ }MX∆
P
m
m
mm ⊥ bc,Pv
Determinazione dell’asse di Mozzi (3/4)
=0

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 45
89
cωω
P
b
a,Pv
{ }ωa
M
{ }MX∆a,Pv
ωM’
M’’M’’’
Ogni corpo rigido ruota attorno a un asse per M e parallelo a che contemporaneamente trasla lungo se stesso con velocità : asse di Mozzi
{ }ωa,Pv
Determinazione dell’asse di Mozzi (4/4)
Stato di deformazione

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 46
91
dXnε
dXnϕ
xd
Xd
ud
n
{ } [ ] { }nn Tn ε=ε
xd Xd
dXedXdx n=−
I dispositivi che misurano gli allungamenti sono solidali alla materia e perciò seguono il segmento
. Perciò l’allungamento misurato vale:dxdX →
P
Misura di allungamento
92
Quale relazione esiste tra ed ?ne nε
{ } { } [ ]{ }{ }du
dXdXdx ε+=
{ } { } { } { } { } { }dX
TTT
n
dundXndxn⋅ε
+=
{ } { } { } { }n
TTdXdXn
dXdxn ε+=
{ } { } { }( )n
TdX
dXdxn ε=
−
equazione vettoriale
proiettata su
divisa per
da elaborare ulteriormente
{ }n
dX
Relazione tra misura e deformazione(1/2)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 47
93
{ } { } ( ) dx....1dxcosdxdxn 2n
T ≅+ϕ−⋅≅ϕ⋅=
nn edX
dXdx=
−≅ε⇒
al primo ordine; mentre:
{ } { } dXdXn T =
dXnε
dXnϕ
xd
Xd
ud
n
nϕ
P
Relazione tra misura e deformazione(2/2)
94
Se si misurano le su tre direzioni (a, b, c) giacenti sulla superficie di un componente meccanico (ortogonale all’asse z)
nne ε≅
x
z
y
a b
c
{ }an { }bn
{ }cn
Risoluzione della deformazione piana (1/3)

Comportamento meccanico dei materiali Stato di deformazione
© 2006 Politecnico di Torino 48
95
{ }
i,yi,xxy2
i,yyy2
i,xxx
i
y
x
zzyzxz
yzyyxy
xzxyxx
iyxi,n
nnnn
0nn
21
21
21
21
21
21
0nn
⋅⋅γ+⋅ε+⋅ε=
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⋅
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
εγγ
γεγ
γγε
⋅=ε
Per ciascuna delle i=(a, b, c):
Risoluzione della deformazione piana (2/3)
96
dove ovviamente gli sono noti a priorii,yi,x n,nQuindi, si risolve rispetto a xyyyxx ,, γεε
Quindi per le tre misure:
Risoluzione della deformazione piana (3/3)
⎪⎪⎩
⎪⎪⎨
⎧
⋅⋅γ+⋅ε+⋅ε=
⋅⋅γ+⋅ε+⋅ε=
⋅⋅γ+⋅ε+⋅ε=
c,yc,xxy2
c,yyy2
c,xxxc,n
b,yb,xxy2
b,yyy2
b,xxxb,n
a,ya,xxy2
a,yyy2
a,xxxa,n
nnnne
nnnne
nnnne