spring 2007approximation algorithms1. spring 2007approximation algorithms2 outline and reading...
TRANSCRIPT
Spring 2007 Approximation Algorithms 1
Approximation Algorithms
Spring 2007 Approximation Algorithms 2
Outline and ReadingApproximation Algorithms for NP-Complete Problems (§13.4) Approximation ratios Polynomial-Time Approximation Schemes
(§13.4.1) PTAS for 0/1 Knapsack 2-Approximation for Vertex Cover (§13.4.2) 2-Approximation for TSP special case (§13.4.3) Log n-Approximation for Set Cover (§13.4.4)
Spring 2007 Approximation Algorithms 3
Approximation RatiosOptimization Problems We have some problem instance x that has
many feasible “solutions”. We are trying to minimize (or maximize) some
cost function c(S) for a “solution” S to x. For example, Finding a minimum spanning tree of a graph Finding a smallest vertex cover of a graph Finding a smallest traveling salesperson tour in a
graph
Spring 2007 Approximation Algorithms 4
Approximation RatiosAn approximation produces a solution T T is a δ-approximation to the optimal solution
if c(T) ≤ δ OPT (assuming a minimization problem). OPT ≤ δ c(T) for a maximization problem In both cases we assume δ>1
Spring 2007 Approximation Algorithms 5
Polynomial-Time Approximation Schemes
A problem L has a polynomial-time approximation scheme (PTAS) if for any fixed >0 it has a (1+)-approximation algorithm that runs in polynomial time Polynomial time based on input size n, though
may also appear in the expression for run time.
A problem has a fully polynomial-time approximation scheme (FPTAS) if the run time is polynomial in both n and 1/0/1 Knapsack has a FPTAS, with a running time that is O(n3/ ).
Spring 2007 Approximation Algorithms 6
PTAS for 0/1 Knapsack
Problem: Set S of items numbered 1,…,n. Constraint (total size limit) s Item i has size si and worth wi
Want to find subset T that maximizes the worth
sswwTi
iTi
i ≤= ∑∑∈∈
satisfying while
Spring 2007 Approximation Algorithms 7
PTAS for 0/1 Knapsack
Want: PTAS that produces a (1+)-approximation for any given fixed positive constant That is, if OPT is the value (total worth) of the optimal solution to S, then our algorithm should find subset T’ satisfying the size constraint and such that if we define
then OPT ≤ (1 + )w
∑∈
=Ti
iww
Spring 2007 Approximation Algorithms 8
PTAS for 0/1 Knapsack
Actually show that w’ ≥ (1 - /2)OPTOk, since for 0< <1, we have 1/(1 - /2) < 1+ So w’≥ (1 - /2)OPT implies
wwOPT +<−
≤ )1(11
2
Spring 2007 Approximation Algorithms 9
PTAS for 0/1 Knapsack
We leverage the rescalability of the problemAssume: size of each item in S is at most s (otherwise it can be thrown out without changing the solution)Let wmax denote the maximum worth of the items in S
Clearly wmax ≤ OPT ≤ n wmax
Let M = wmax / 2n.
Round each worth wi down to wi’, the nearest smaller multiple of M. Let S’ denote rounded version of S, and OPT’ the optimal solution to S’
Spring 2007 Approximation Algorithms 10
PTAS for 0/1 Knapsack
Note: OPT ≤ n wmax = n (2nM / ) = 2n2M/
Also: OPT’ ≤ OPT, since we rounded all worth values down without changing the sizesThus: OPT’ ≤ 2n2M/ So, look at solution to S’Every item worth in S’ is a multiple of M, so any achievable worth is a multiple of MThere are no more than N = 2n2/ of these to consider.
Spring 2007 Approximation Algorithms 11
PTAS for 0/1 Knapsack
We now use dynamic programming to solve S’Let s[i,j] = the size of the smallest set of items in {1,2,…j} worth iM
Note that j tells us which set we are choosing from, and i tells us the multiple of M)
Key observation: For i=1,2,…N and j = 1,2,…n,
Why? Item j either will or will not contribute to the smallest way of achieving worth iM from items in {1,2,…j}
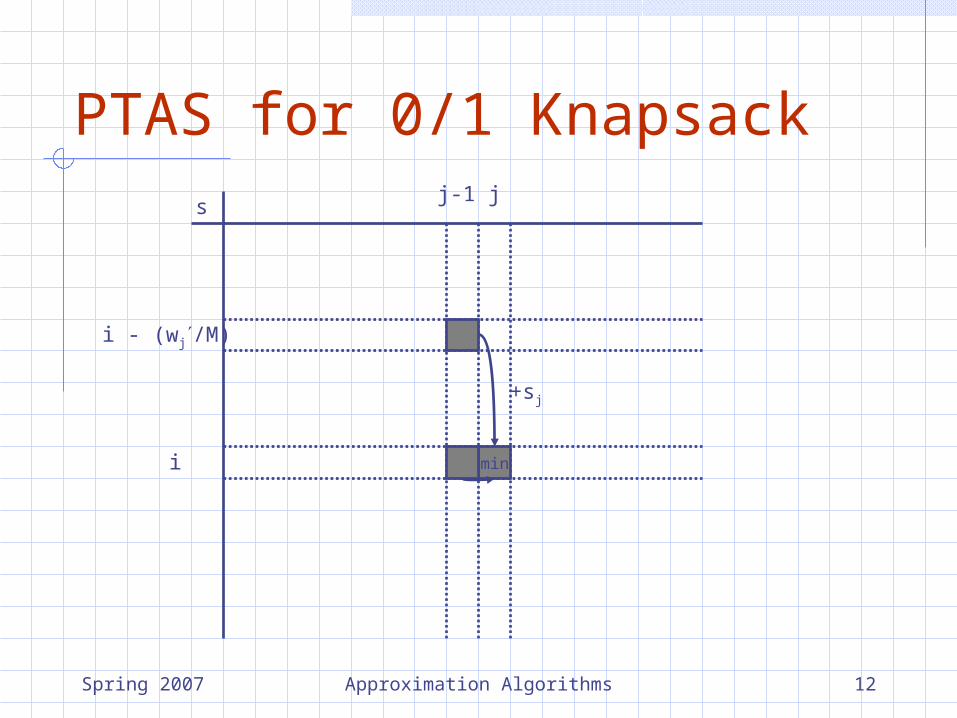
]}1),/'([],1,[min{],[ −−+−= jMwissjisjis jj
Spring 2007 Approximation Algorithms 12
PTAS for 0/1 Knapsack
min
j-1 js
i - (wj/M)
i
+sj
Spring 2007 Approximation Algorithms 13
PTAS for 0/1 Knapsack
Define s[i,0]=+ for i = 1,2,…N Roughly, no items implies we need infinitely many of
them to achieve worth iM
Define s[0,j]=0 for j = 1,2,…n
Optimal value OPT’ = max{iM: s[i,n]≤s}
Cost of the algorithm O(nN) = O(n3/ )
Spring 2007 Approximation Algorithms 14
PTAS for 0/1 Knapsack
How good an estimate is OPT’?Well, we reduced worth of each item by at most M, so OPT’ ≥ OPT – nM = OPT - wmax/2, since the optimal solution can contain at most n items.
But, OPT ≥ wmax so
OPT’ ≥ OPT - OPT/2 = (1- /2)OPT
which is what we needed to prove.
Spring 2007 Approximation Algorithms 15
Vertex Cover
A vertex cover of graph G=(V,E) is a subset W of V, such that, for every (a,b) in E, a is in W or b is in W. OPT-VERTEX-COVER: Given an graph G, find a vertex cover of G with smallest size.OPT-VERTEX-COVER is NP-hard.
Spring 2007 Approximation Algorithms 16
A 2-Approximation for Vertex Cover
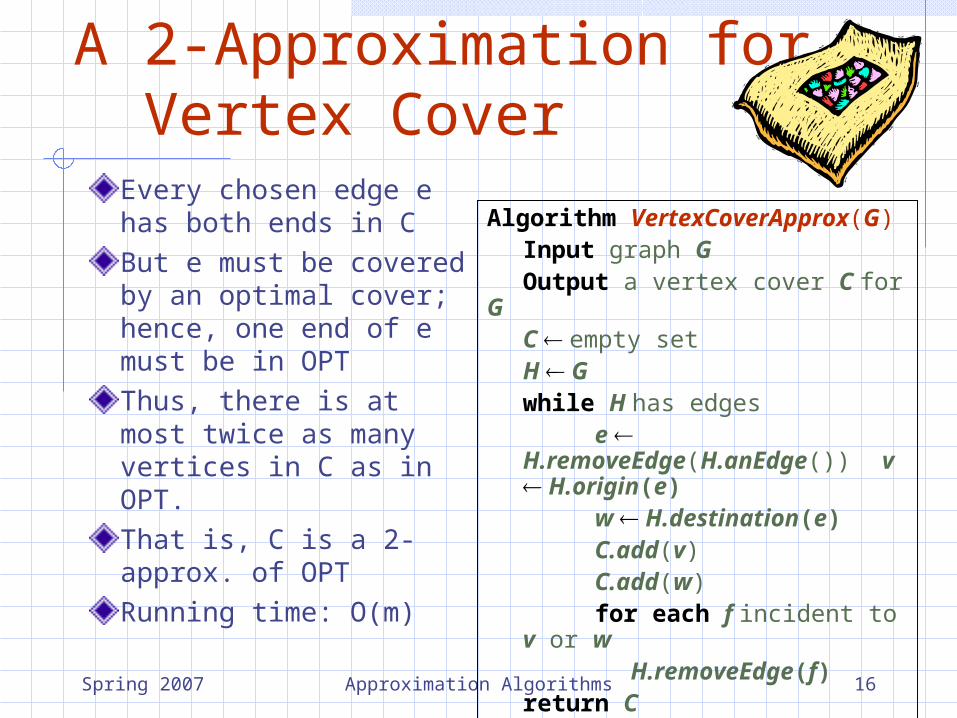
Every chosen edge e has both ends in CBut e must be covered by an optimal cover; hence, one end of e must be in OPTThus, there is at most twice as many vertices in C as in OPT.That is, C is a 2-approx. of OPTRunning time: O(m)
Algorithm VertexCoverApprox(G)Input graph GOutput a vertex cover C for GC empty setH Gwhile H has edges
e H.removeEdge(H.anEdge()) v H.origin(e)
w H.destination(e)C.add(v)C.add(w)for each f incident to v or w
H.removeEdge(f)return C
Spring 2007 Approximation Algorithms 17
Special Case of the Traveling Salesperson Problem
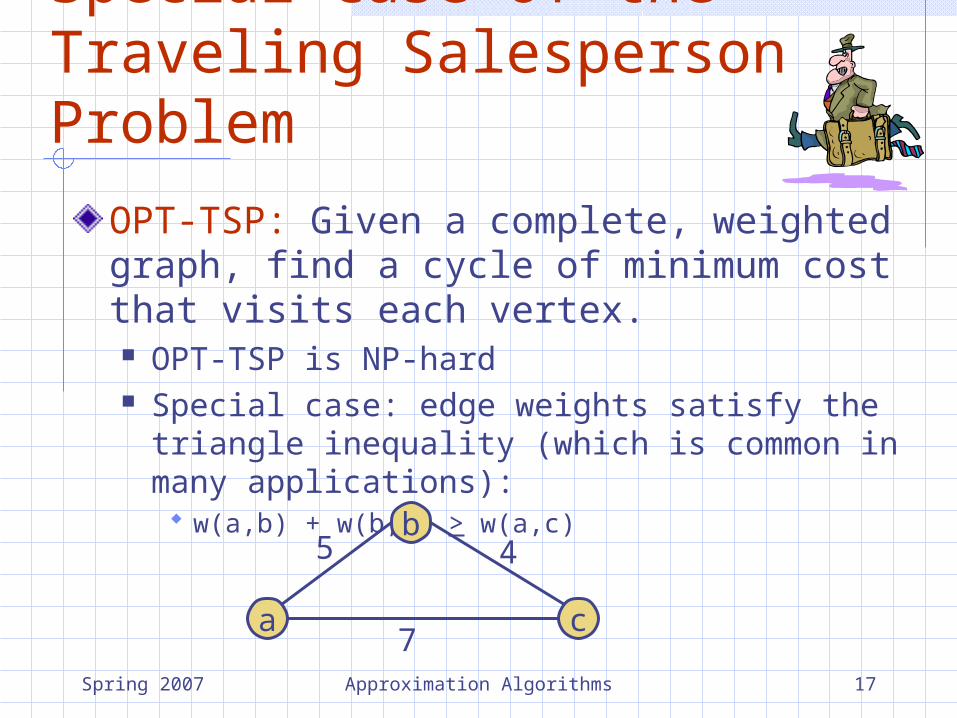
OPT-TSP: Given a complete, weighted graph, find a cycle of minimum cost that visits each vertex. OPT-TSP is NP-hard Special case: edge weights satisfy the triangle
inequality (which is common in many applications): w(a,b) + w(b,c) > w(a,c)
a
b
c
5 4
7
Spring 2007 Approximation Algorithms 18
Special Case of the Traveling Salesperson Problem
Algorithm has three steps Construct a minimum spanning tree M for G Construct an Euler tour traversal E of T (walk
around T always keeping edges to our left) Construct tour T from E by marching around E
but: Each time we have (u,v) and (v,w) in E such
that v has already been visited, we replace these two edges by the edge (u,w)
Spring 2007 Approximation Algorithms 19
A 2-Approximation for TSP Special Case
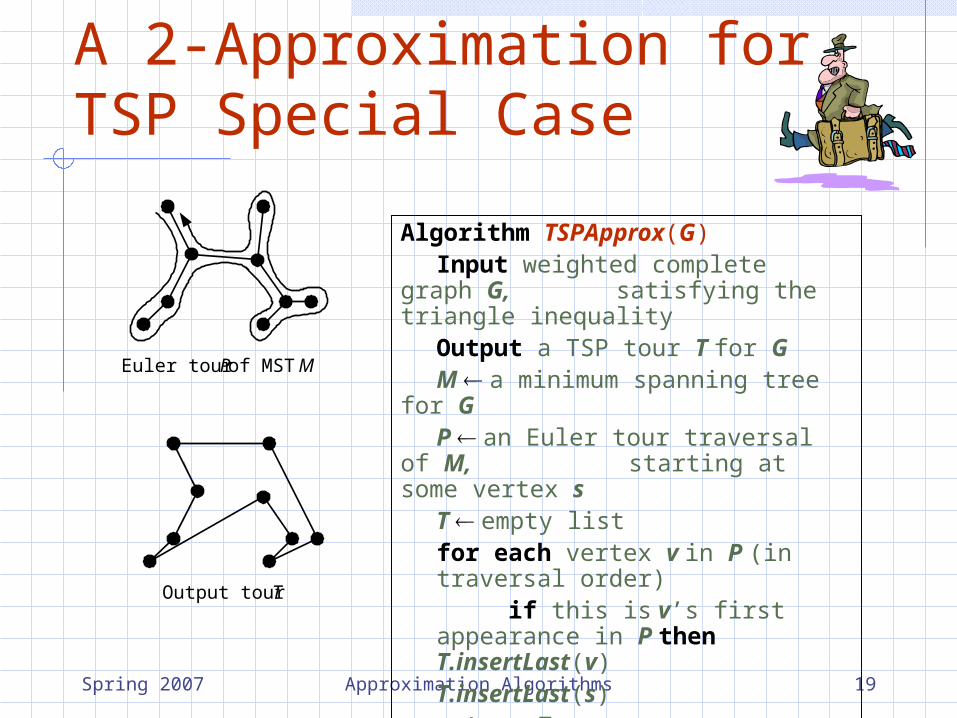
Output tour T
Euler tour P of MST M
Algorithm TSPApprox(G)Input weighted complete graph G, satisfying the triangle inequalityOutput a TSP tour T for GM a minimum spanning tree for GP an Euler tour traversal of M, starting at some vertex sT empty listfor each vertex v in P (in traversal order)
if this is v’s first appearance in P then T.insertLast(v)T.insertLast(s)return T

Spring 2007 Approximation Algorithms 20
A 2-Approximation for TSP Special Case - Proof
Euler tour P of MST MOutput tour T Optimal tour OPT (twice the cost of M) (at least the cost of MST M)(at most the cost of P)
The optimal tour is a spanning tour; hence |M|<|OPT|.Optimal tour minus one edge is spanning tree
The Euler tour P visits each edge of M twice; hence |P|=2|M|Each time we shortcut a vertex in the Euler Tour we will not increase the total length, by the triangle inequality (w(a,b) + w(b,c) > w(a,c)); hence, |T|<|P|.Therefore, |T|<|P|=2|M|<2|OPT|
Spring 2007 Approximation Algorithms 21
Set Cover
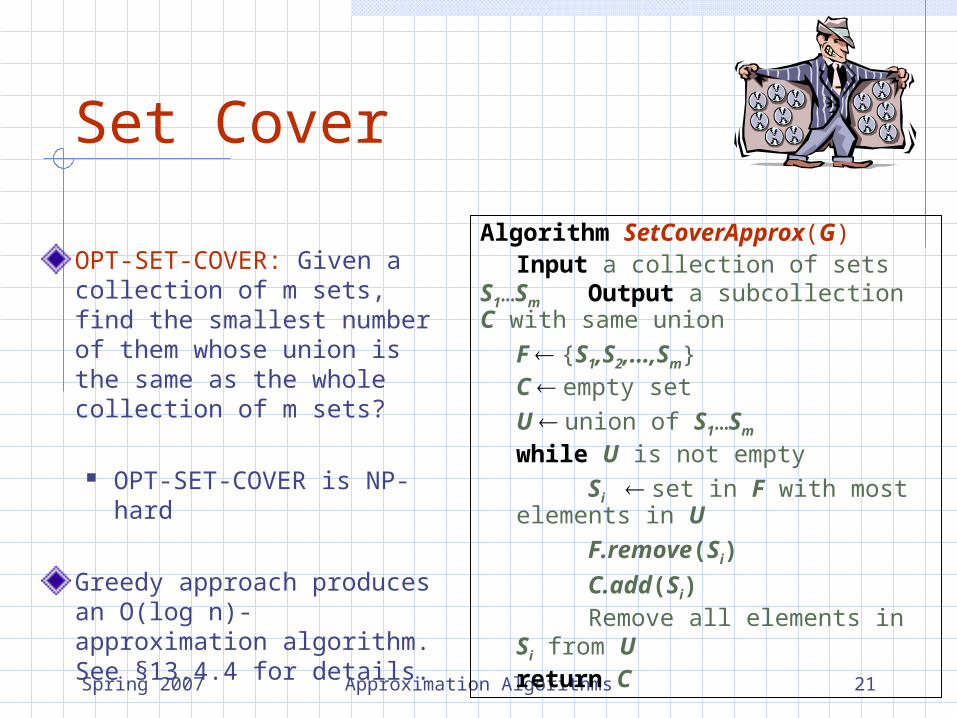
OPT-SET-COVER: Given a collection of m sets, find the smallest number of them whose union is the same as the whole collection of m sets?
OPT-SET-COVER is NP-hard
Greedy approach produces an O(log n)-approximation algorithm. See §13.4.4 for details.
Algorithm SetCoverApprox(G)
Input a collection of sets S1…Sm Output a subcollection C with same union
F {S1,S2,…,Sm}C empty set
U union of S1…Sm while U is not empty
Si set in F with most elements in U
F.remove(Si)
C.add(Si)
Remove all elements in Si from Ureturn C
Spring 2007 Approximation Algorithms 22
Backtracking and Branch-and-Bound
Spring 2007 Approximation Algorithms 23
Back to NP-Completeness
Many hard problems are NP-Complete But we still need solutions to them, even if
they take a long time to generate
Backtracking and Branch-and-Bound are two design techniques that have proven promising for dealing with NP-Complete problems And often these find ``good enough’’
solutions in a reasonable amount of time
Spring 2007 Approximation Algorithms 24
Backtracking
A backtracking algorithm searches through a large set of possibilities in a systematic way Typically optimized to avoid symmetries in
problem instances (think, e.g., TSP) Traverses search space in manner such that
``easy’’ solution is found if one exists.
Technique takes advantage of an inherent structure possessed by many NP-Complete problems
Spring 2007 Approximation Algorithms 25
NP-Complete Problem Structure
Recall: acceptance of solution for instance x of NP-complete problem can be verified in polynomial timeVerification typically involves checking a set of choices (the output of the choice function) to see whether they satisfy a formula or demonstrate a successful configuration E.g., Values assigned to Boolean variables,
vertices of graph to include in special set, items to go in knapsack
Spring 2007 Approximation Algorithms 26
Backtracking
Systematically searches for a solution to problemTraverses through possible ``search paths’’ to locate solutions or dead endsConfiguration at end of such a path consists of a pair (x,y) x is the remaining problem to be solved y is the set of choices that have been made
to get to this subproblem from the original problem instance
Spring 2007 Approximation Algorithms 27
Backtracking
Start search with the pair (x,), where x is the original problem instanceAny time that backtracking algorithm discovers a configuration (x,y) that cannot lead to a valid solution, it cuts off all future searches from this configuration and backtracks to another configuration.
Spring 2007 Approximation Algorithms 28
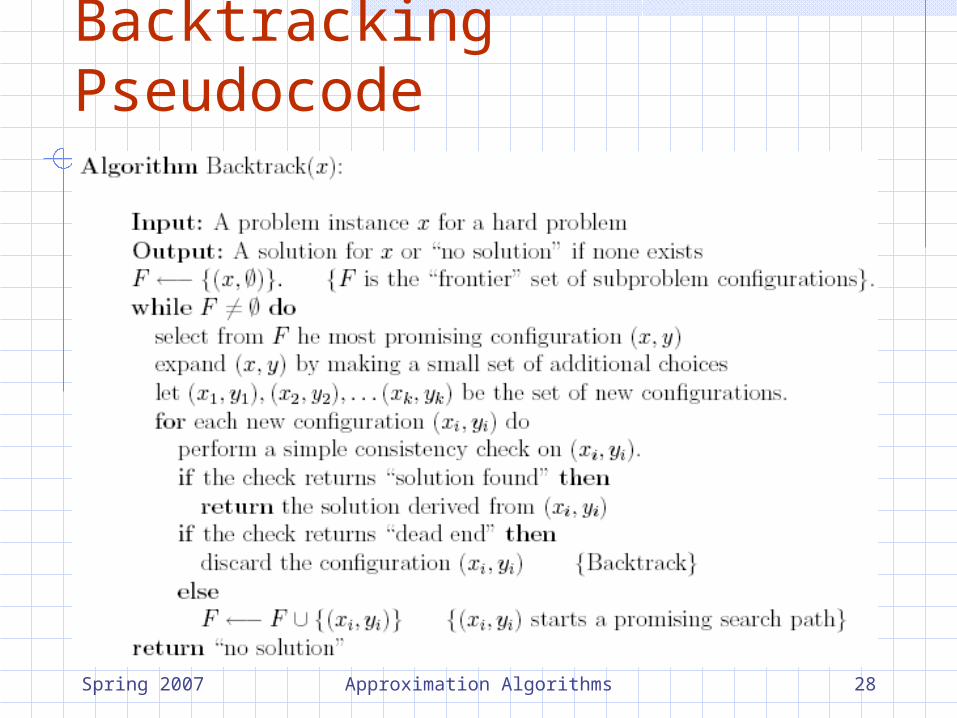
Backtracking Pseudocode
Spring 2007 Approximation Algorithms 29
Backtracking: Required Details
Define way of selecting the most promising candidate configuration from frontier set F. If F is a stack, get depth-first search of solution space.
F a queue gives a breadth-first search, etc.
Specify way of expanding a configuration (x,y) into subproblem configurations This process should, in principle, be able to generate
all feasible configurations, starting from (x,)
Describe how to perform a simple consistency check for configuration (x,y) that returns ``solution found’’, ``dead end’’, or ``continue’’
Spring 2007 Approximation Algorithms 30
Example: CNF-SAT
Problem: Given Boolean formula S in CNF, we want to know if S is satisfiableHigh level algorithm:
Systematically make tentative assignments to variables in S
Check whether assignments make S evaluate immediately to 0 or 1, or yield a new formula S’ for which we can continue making tentative value assignments
Configuration in our algorithm is a pair (S’,y) where S’ is a Boolean formula in CNF y is assignment of values to variables NOT in S’ such that
making these assignments to S yields the formula S’
Spring 2007 Approximation Algorithms 31
Example: CNF-SAT (details)
Given frontier F of configurations, the most promising subproblem S’ is the one with the smallest clause This formula would be the most constrained of
all formulas in F, so we expect it to hit a dead end most quickly (if it’s going to hit a dead end)
To generate new subproblem from S’, locate smallest clause in S’, pick a variable xi that appears in that clause, and create two new subproblems associated with assigning xi=0 and xi=1 respectively
Spring 2007 Approximation Algorithms 32
Example: CNF-SAT (details)
Processing S’ for consistency check for assignment of a variable xi in S’
First, reduce any clauses containing xi based on the value assigned to xi
If this reduction results in new single literal clause (xj or ~xj) we assign value to xj to make single literal clause satisfied. Repeat process until no single literal clauses
If we discover a contradiction (clauses xi and ~xi , or an empty clause) we return ``dead end’’
If we reduce S’ all the way to constant 1, return ``solution found’’ along with assignments made to reach this
Else, derive new subformula S’’ such that each clause has at least two literals, along with value assignments that lead from S to S’’ (this is the reduce operation)
Spring 2007 Approximation Algorithms 33
Example: CNF-SAT (details)
Placing this in backtracking template results in algorithm that has exponential worst case run time, but usually does OKIn fact, if each clause has no more than two literals, this algorithm runs in polynomial time.
Spring 2007 Approximation Algorithms 34
Branch-and-Bound
Backtracking not designed for optimization problems, where in addition to having some feasibility condition that must be satisfied, we also have a cost f(x) to be optimized
We’ll assume minimized
Can extend backtracking to work with optimization problems (result is Branch-and-Bound)
When a solution is found, we continue processing to find the best solution
Add a scoring mechanism to always choose most promising configuration to explore in each iteration (best-first search)

Spring 2007 Approximation Algorithms 35
Branch-and-Bound
In addition to the details required for the backtracking design pattern, we add one more to handle optimization:For any configuration (x,y) we assume we have a lower bound function, lb(x,y), that returns a lower bound on the cost of any solution that is derived from this configuration.
Only requirement for lb(x,y) is that it must be less than or equal to the cost of any derived solution.
Of course, a more accurate lower bound function results in a more efficient algorithm.
Spring 2007 Approximation Algorithms 36
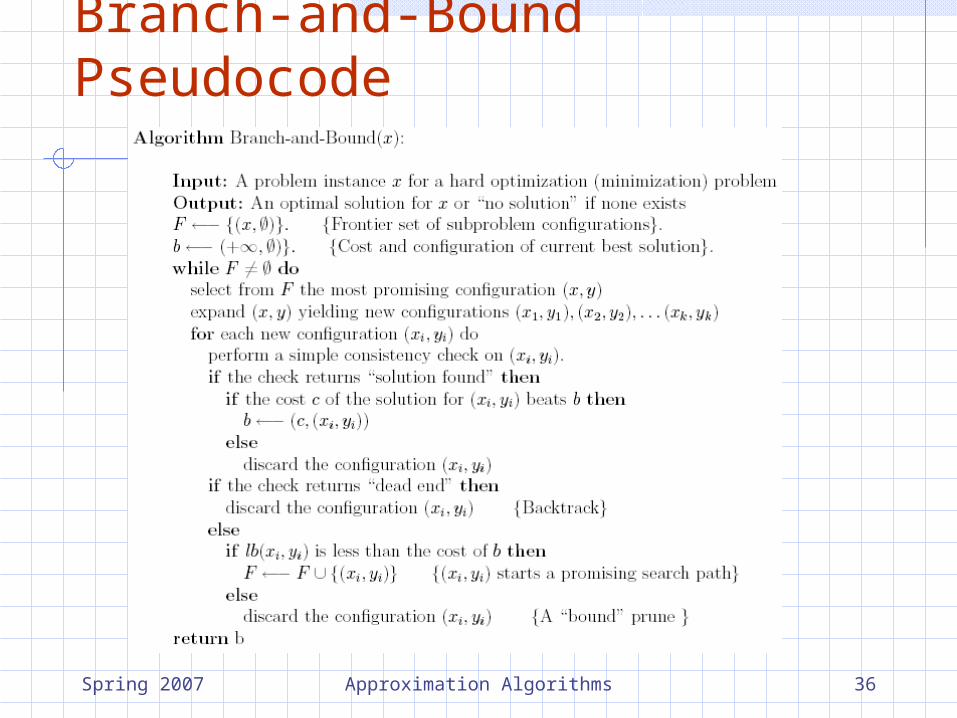
Branch-and-Bound Pseudocode

Spring 2007 Approximation Algorithms 37
Branch-and-Bound Alg. for TSP
Problem: optimization version of TSP Given weighted graph G, want least cost tour For edge e, let c(e) be the weight (cost) of
edge e
We compute, for each edge e = (v,w) in G, the minimum cost path that begins at v and ends at w while visiting all other vertices of G along the wayWe generate the path from v to w in G – {e} by augmenting a current path by one vertex in each loop of the branch-and-bound algorithm
Spring 2007 Approximation Algorithms 38
Branch-and-Bound Alg. for TSP
After having built a partial path P, starting, say, at v, we only consider augmenting P with vertices not in PWe can classify a partial path P as a ``dead end’’ if the vertices not in P are disconnected in G – {e}We define the lower bound function to be the total cost of the edges in P plus c(e). Certainly a lower bound for any tour built
from e and P

Spring 2007 Approximation Algorithms 39
Branch-and-Bound Alg. for TSP
After having run the algorithm to completion for one edge of G, we can use the best path found so far over all tested edges, rather than restarting the current best solution b at +Run time can still be exponential, but we eliminate a considerable amount of redundancyThere are other heuristics for approximating TSP. We won’t discuss them here.