spatiotemporal information processing no.4 3 components of virtual reality-3 display system
DESCRIPTION
Spatiotemporal Information Processing No.4 3 components of Virtual Reality-3 Display System. Kazuhiko HAMAMOTO Dept. of Information Media Technology, School of Information and Telecommunication Eng., Tokai University, Japan. Today’s Contents. Somatic sense Skin sense Deep sense - PowerPoint PPT PresentationTRANSCRIPT
Spatiotemporal Information ProcessingNo.43 components of Virtual Reality-3Display System
Kazuhiko HAMAMOTO
Dept. of Information Media Technology,
School of Information and Telecommunication Eng.,
Tokai University, Japan
Today’s Contents
Somatic sense Skin sense Deep sense Haptic sense
Display system – skin sense The principle of tactile primary color
Display system – deep sense Display system – haptic sense

The relationship among 3 components (review)
Person
real space virtual space
Simulation system
Display system
Sensing system
computer
Somatic sense (1/4)
Cutaneous sense (or sense of touch or skin sense) A sense by some sensory receptors
which lie beneath the surface of the skin
tactile sense, temperature sense, pain sense

Somatic sense (2/4)
Deep sense (or proprioceptive sense) A sense of the relative position of
neighboring parts of the body, whose receptors are found in muscles, tendons and joints
kinetic sense, postural sense

Somatic sense (3/4)
How can “iron ball” be felt by human sense ? Shape ?
Skin sense or deep sense Surface pattern (texture) ?
Skin sense or deep sense Recognition of “iron” ?
Somatic sense (4/4)
Recognition of shape If we wear gloves…. We can feel -> deep sense
Recognition of pattern If we wear gloves…. We cannot feel -> skin sense
Recognition of “iron” Temperature sense
Haptic sense
“Active touch” can improve the precision of the recognition
Haptic sense Active touch sense, which is
integrated sense of skin sense and deep sense with action of the body

Skin sense and receptors
Tactile sense Merkel disk
displacement Meissner corpuscle
velocity Ruffini corpuscle
displacement
Sense of contact force (pressure) Ruffine corpuscle
displacement Pacinian corpuscle
acceleration
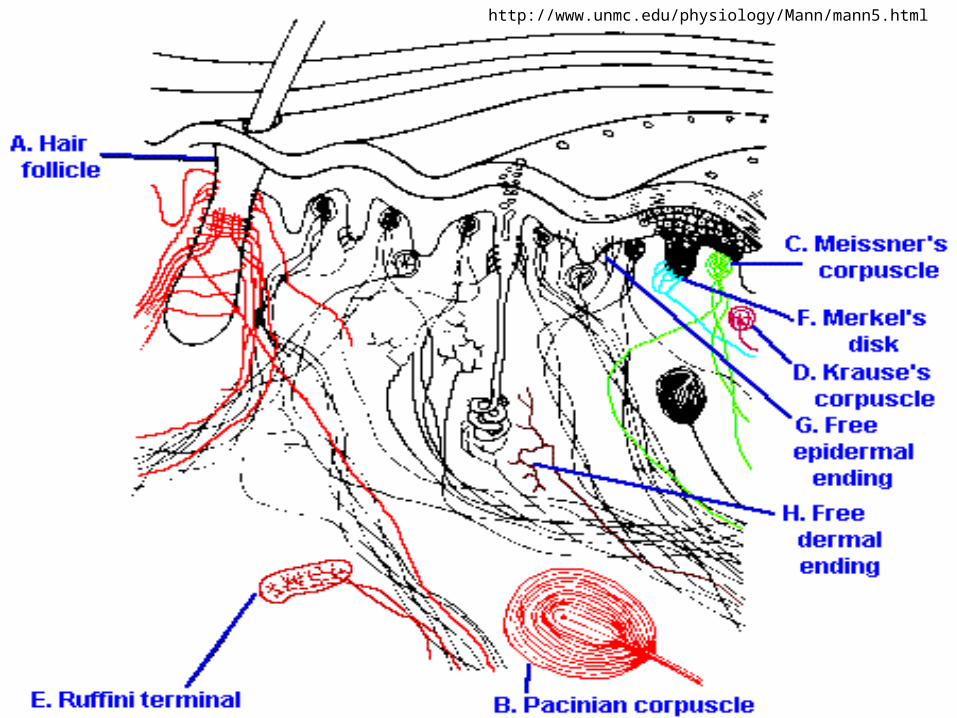
Skin sense and receptors
http://www.unmc.edu/physiology/Mann/mann5.html

Deep sense and receptors
Receptor in muscle Muscle spindle Stretch receptor, which sends muscle’s
length information to CNS Receptor in tendon (joint)
Golgi tendon organ Another type of receptor, which provides
information about changes in muscle tenstion

Muscle spindle
http://www.ucl.ac.uk/~sjjgsca/MuscleControl.html
CNS : Central nervous system
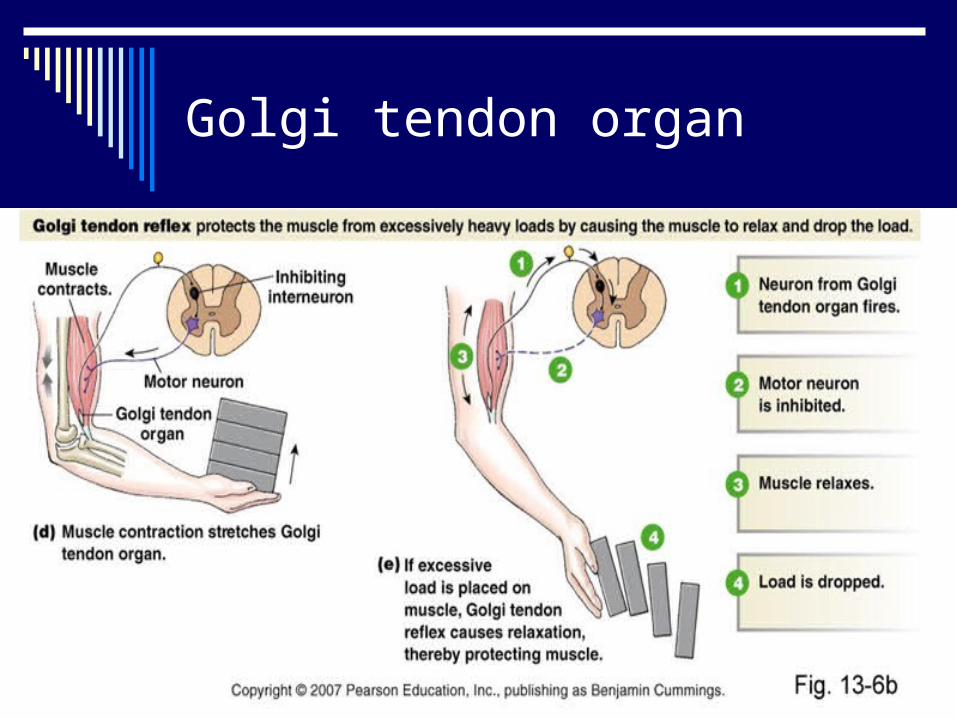
Golgi tendon organ

Display system – skin sense
Virtual sandpaper (M.Minsky, MIT, 1995) Recognition of “type of Texture” Fine uneven surface
Vibration of small amplitude, high frequency
Rough uneven surface Vibration of large amplitude, low frequency

Virtual Sandpaper Margaret Minsky, MIT, 1995
Experimental setup
Screen image
http://dspace.mit.edu/handle/1721.1/29094
Display system – skin sense
The principle of tactile primary colors A kind of functional electrical stimulation
(FES) Each receptor is stimulated electrically and
independently 3 receptors can be stimulated
independently by the differences of how deep seated or singularity of feature along axone.
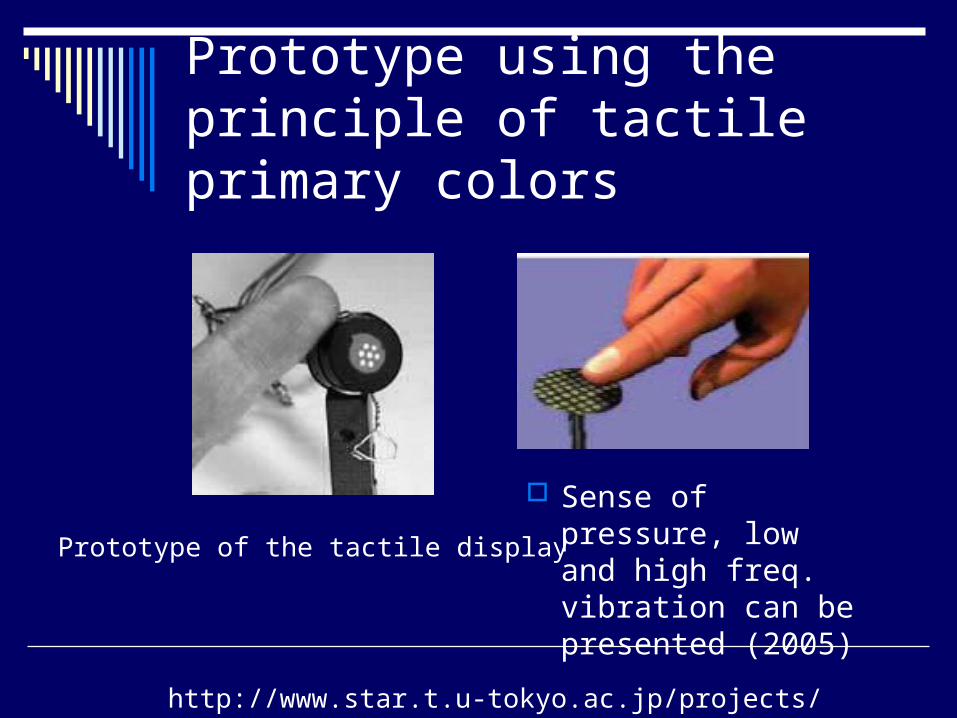
Prototype using the principle of tactile primary colors
Sense of pressure, low and high freq. vibration can be presented (2005)
Prototype of the tactile display
http://www.star.t.u-tokyo.ac.jp/projects/tactile-display/index-j.html

Display system – deep sense
Equipment type A display device is equipped on
hand or fingers. Action of hand or fingers is restricted
by the display device. The restriction causes a feeling of
“existence of an object”

Display system – deep sense
Cyber Grasp

SPIDAR 8 wires and 8 motors
detect the position and the direction of the ball
User controls the ball in 6DOF
Sense of touch or collision is transformed to tension of the wires
http://www.ddd.co.jp/product/spidar/
Display system – deep sense

Display system – Haptic sense
Haptic display Present tactile information Stimulus of tactile organ Force feedback system Shape, hardness, softness,
smoothness, friction and gravity are perceived in virtual space.
Display system – Haptic sense
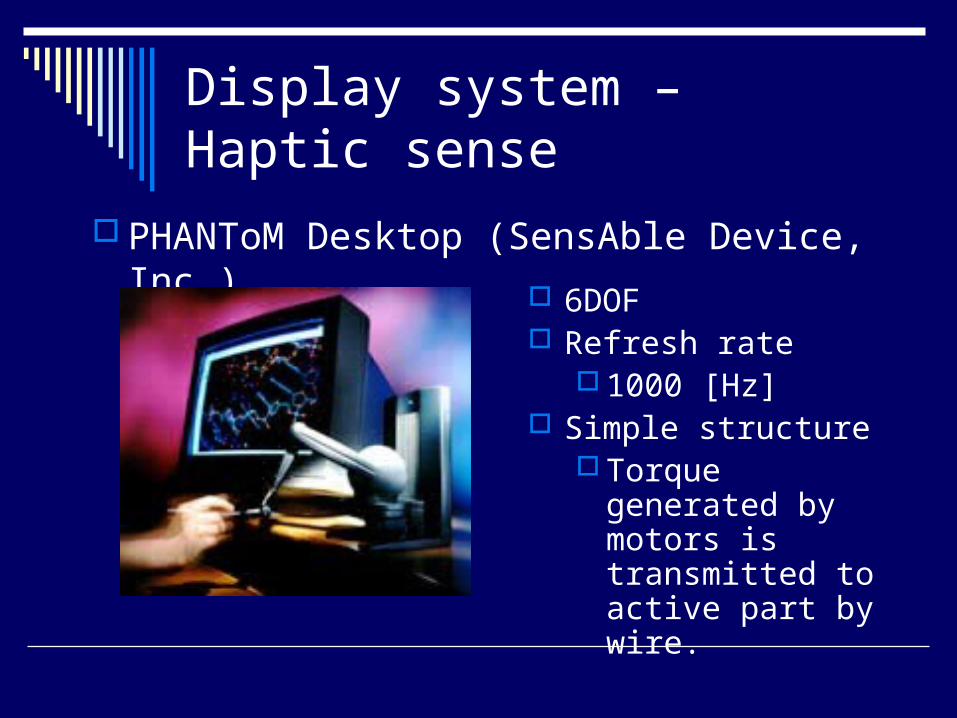
PHANToM Desktop (SensAble Device, Inc.)
6DOF Refresh rate
1000 [Hz] Simple structure
Torque generated by motors is transmitted to active part by wire.

Display system – deep sense
Problems Always feel a display’s weight
and movement Difficult to create “we don’t touch
anything” Response of a motor (actuator)
Deep sense Artificial muscle is
used as switching device
Skin sense Uneven feeling
can be realized by MR fluid
Haptic interfaceActuated withMagnetorheological fluid andArtificial muscleHAMA デバイス
Novel Development in my Lab.

Novel Development in my Lab.
Power supply
New haptic device
Electric circuit for drive
Artificial muscle switch for deep sense
MR fluid for sense of cutaneous

New device for deep sense with Artificial muscle
movable part
Lock by BMX Unlock by BMX
Restricted finger Released finger
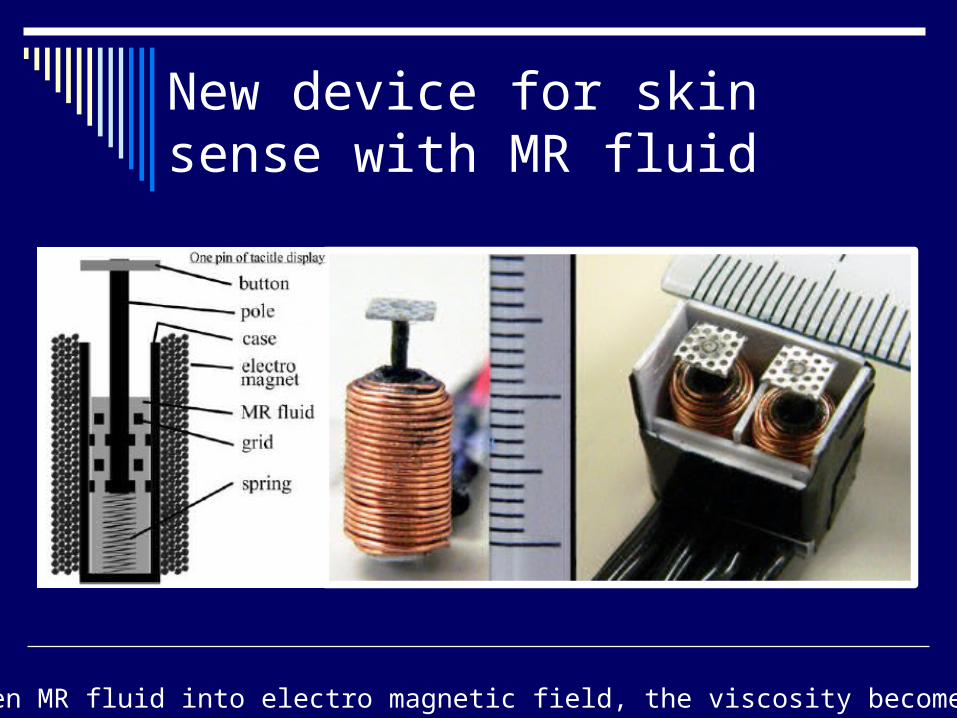
New device for skin sense with MR fluid
When MR fluid into electro magnetic field, the viscosity becomes higher