spatial descriptions and transformations sebastian van delden usc upstate [email protected]
TRANSCRIPT

Notation… Lowercase variables are scalars Uppercase variables are vectors or matrices Leading sub- and super-scripts: identify which coordinate
system a quantity is defined in: AP
A position vector in system {A}
Rotation matrix that rotates from system {B} into system {A} Trailing superscript: inverse A-1 or transpose AT
Trailing subscript: vector component (XA) or description (APBORIG)
Given angle θ1: cos θ1 == cθ1 == c1
RAB
Position Vectors
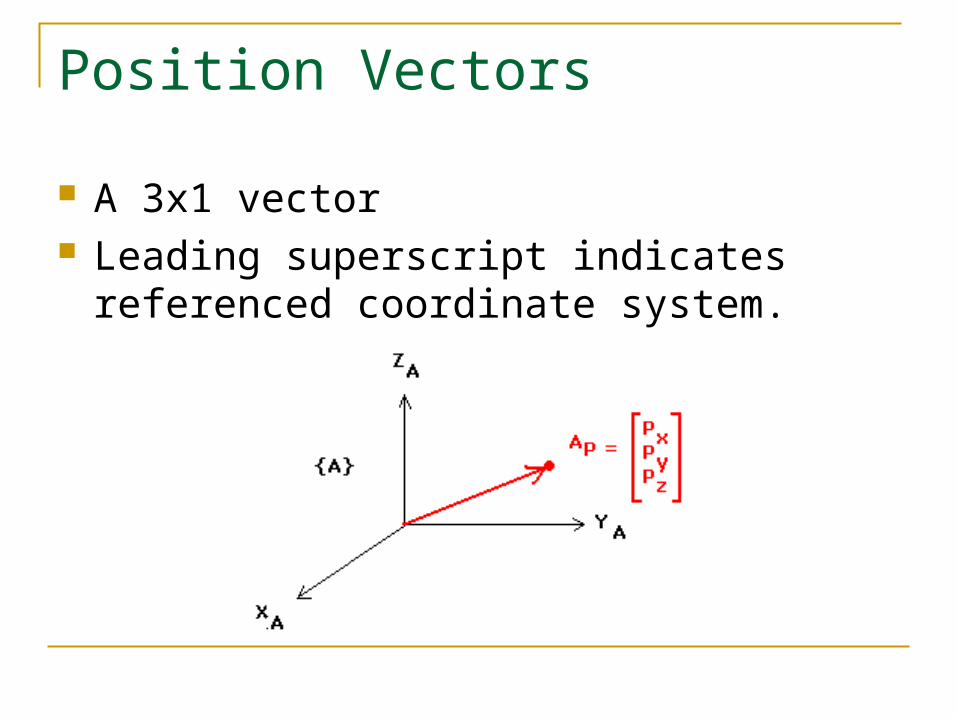
A 3x1 vector Leading superscript indicates referenced
coordinate system.
Orientation
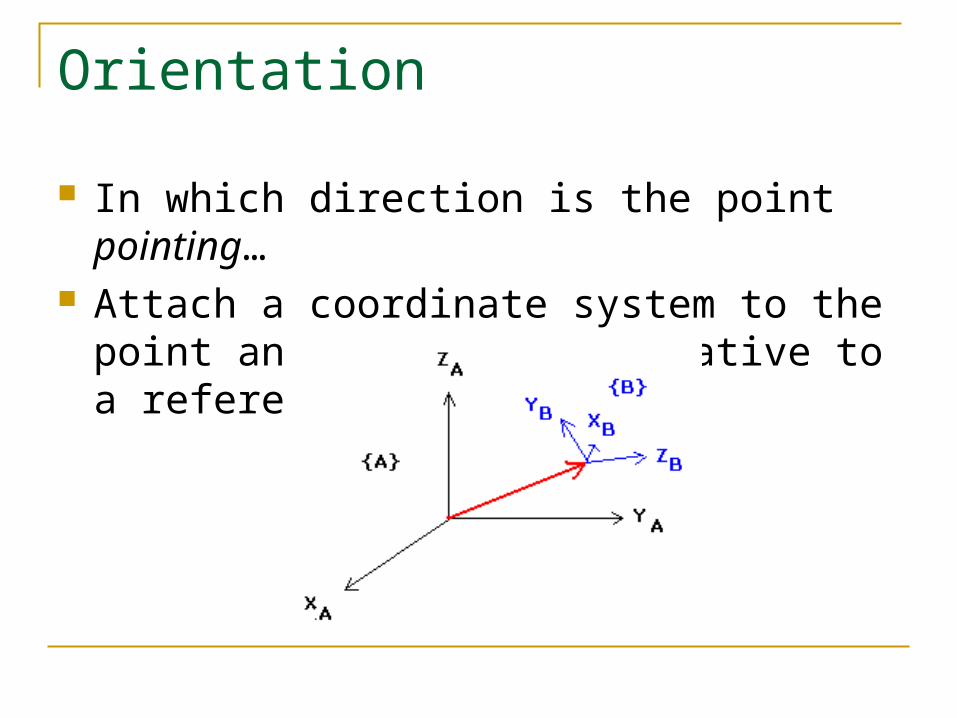
In which direction is the point pointing… Attach a coordinate system to the point and
describe it relative to a reference system.
Orientation cont…
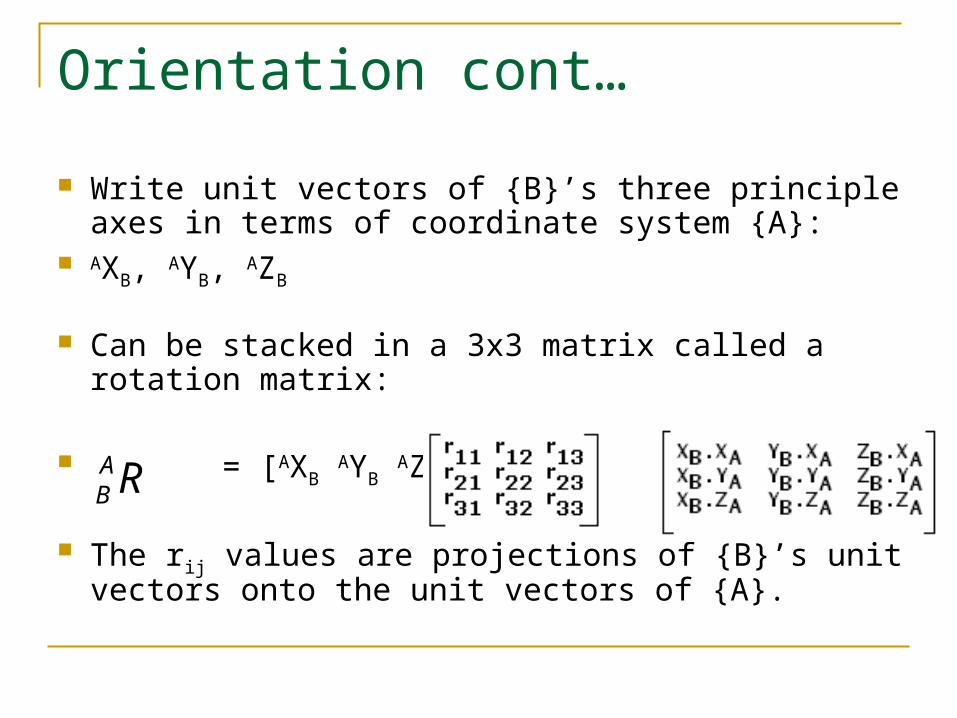
Write unit vectors of {B}’s three principle axes in terms of coordinate system {A}:
AXB, AYB, AZB
Can be stacked in a 3x3 matrix called a rotation matrix:
= [AXB AYB AZB] = =
The rij values are projections of {B}’s unit vectors onto the unit vectors of {A}.
RAB
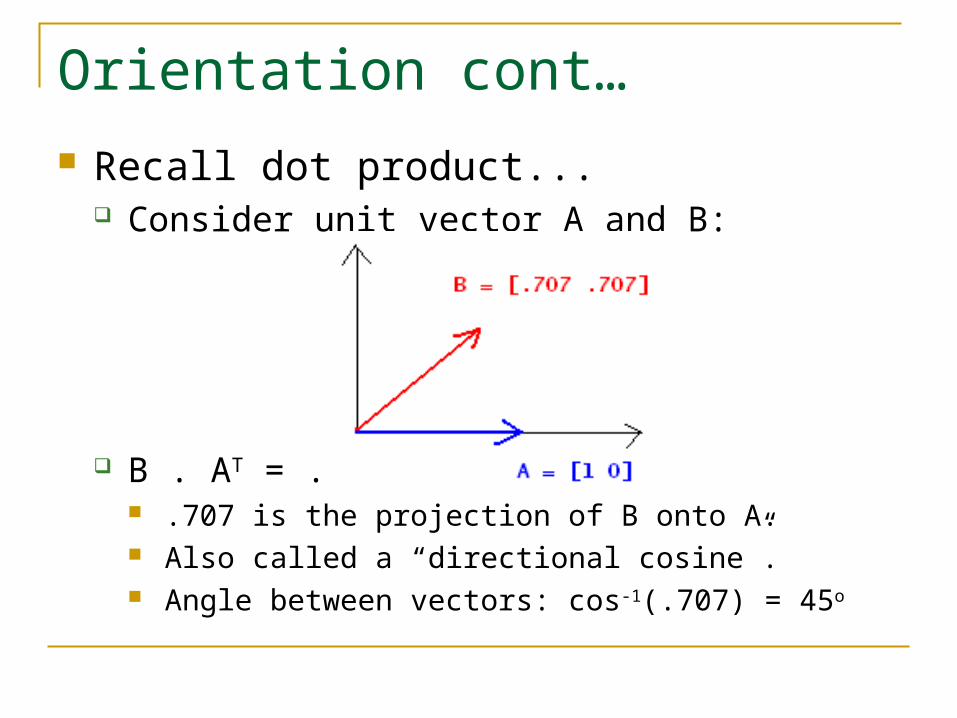
Orientation cont… Recall dot product...
Consider unit vector A and B:
B . AT = .707 .707 is the projection of B onto A. Also called a “directional cosine”. Angle between vectors: cos-1(.707) = 45o
Orientation cont…
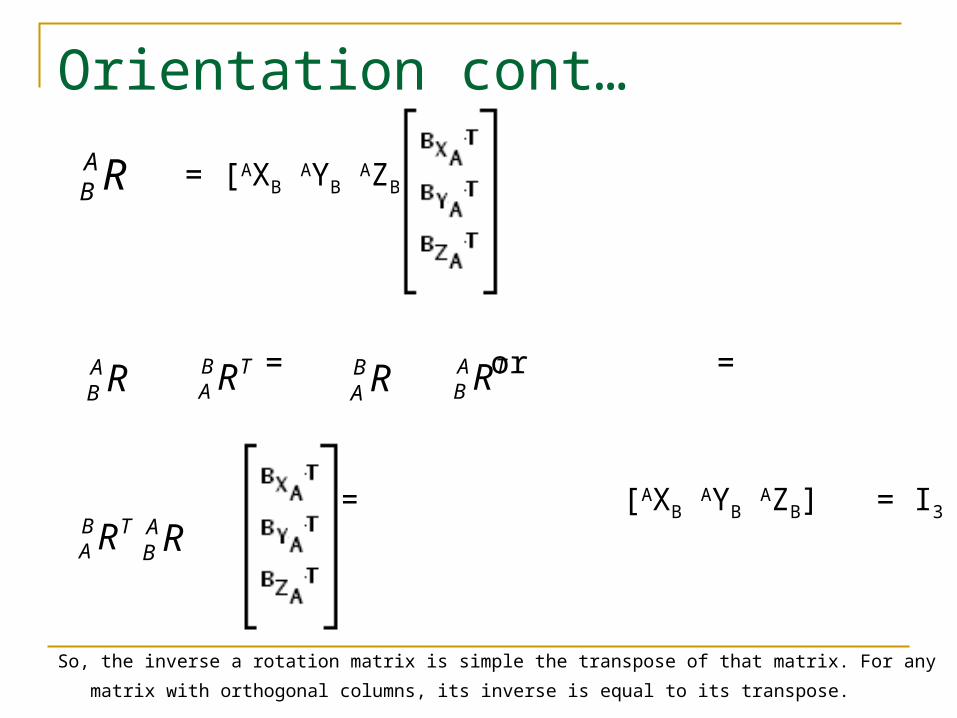
= [AXB AYB AZB] =
= or =
= [AXB AYB AZB] = I3
So, the inverse a rotation matrix is simple the transpose of that matrix. For any matrix with orthogonal
columns, its inverse is equal to its transpose.
RAB
TBARRAB RBA
TABR
RABTB
AR
Orientation cont…
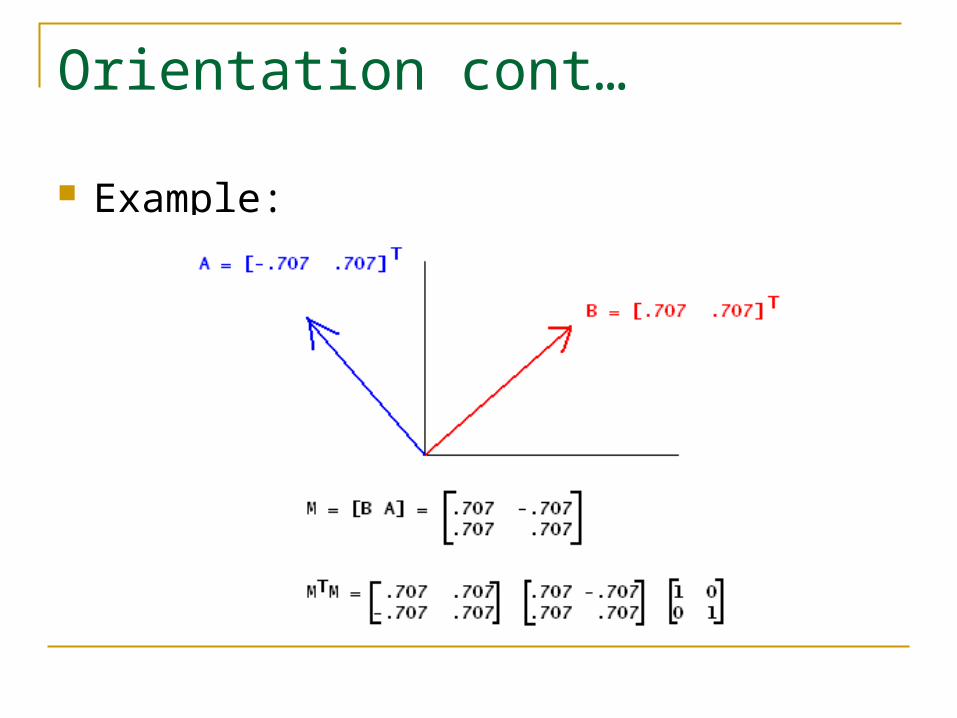
Example:
“Frames”
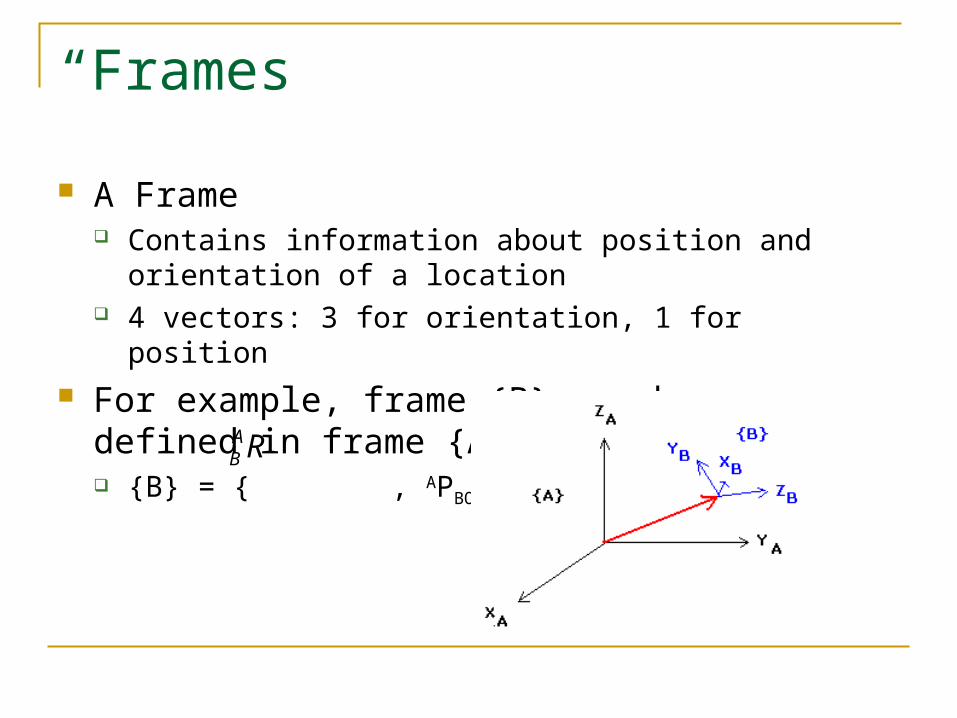
A Frame Contains information about position and orientation of a
location 4 vectors: 3 for orientation, 1 for position
For example, frame {B} can be defined in frame {A} as: {B} = { , APBORG}RAB
Mappings
Need to express one coordinate system in terms of another.
Changing the description (position and orientation) from one frame to another is called a mapping.

Mappings: Pure Translations If the two frames different by only a position
vector (orientation is the same) then only a translation is needed.
AP = BP + APBORG
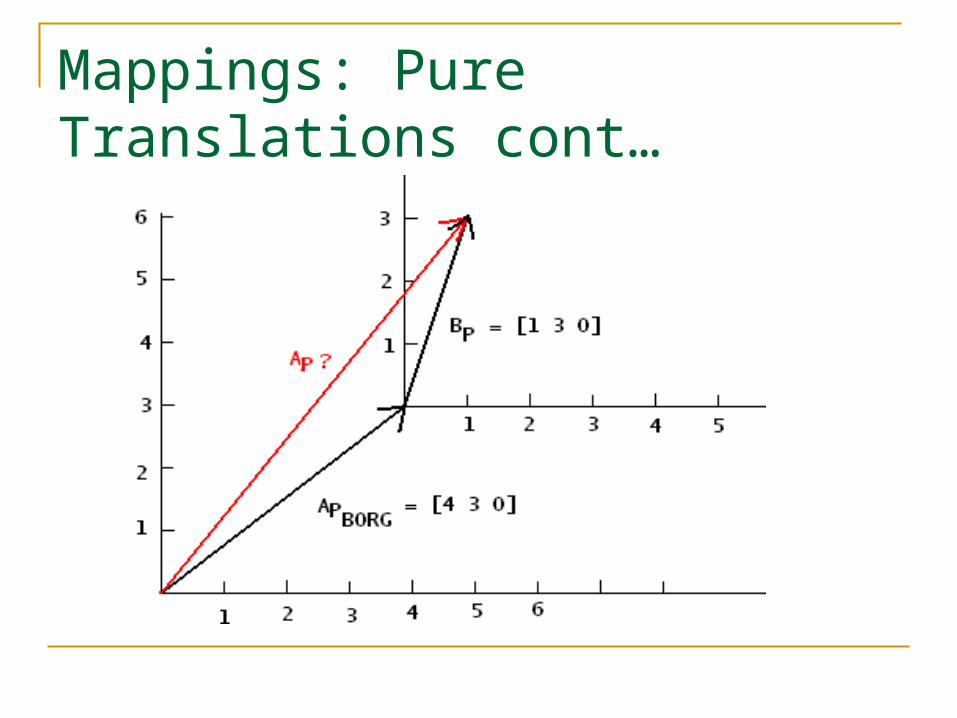
Mappings: Pure Translations cont…
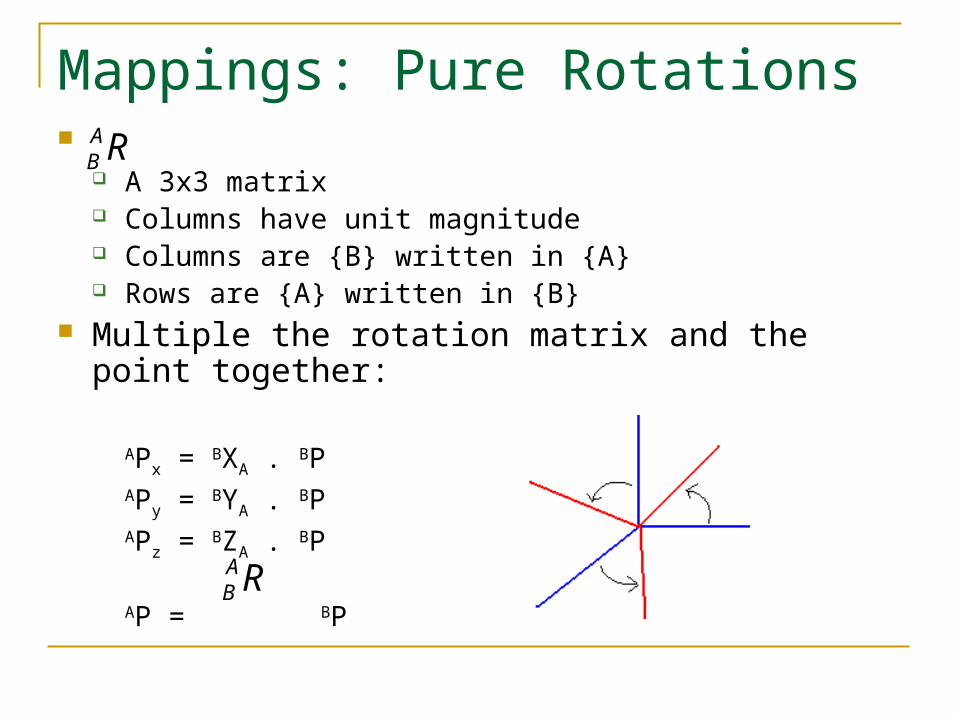
Mappings: Pure Rotations
A 3x3 matrix Columns have unit magnitude Columns are {B} written in {A} Rows are {A} written in {B}
Multiple the rotation matrix and the point together:
APx = BXA . BPAPy = BYA . BPAPz = BZA . BP
AP = BPRAB
RAB
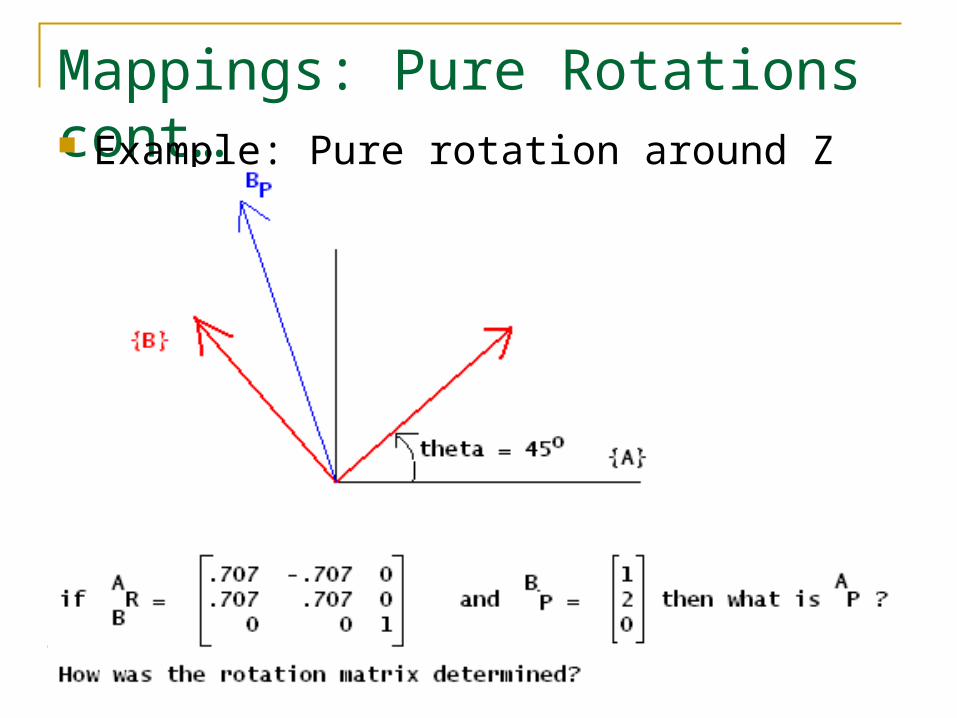
Mappings: Pure Rotations cont… Example: Pure rotation around Z
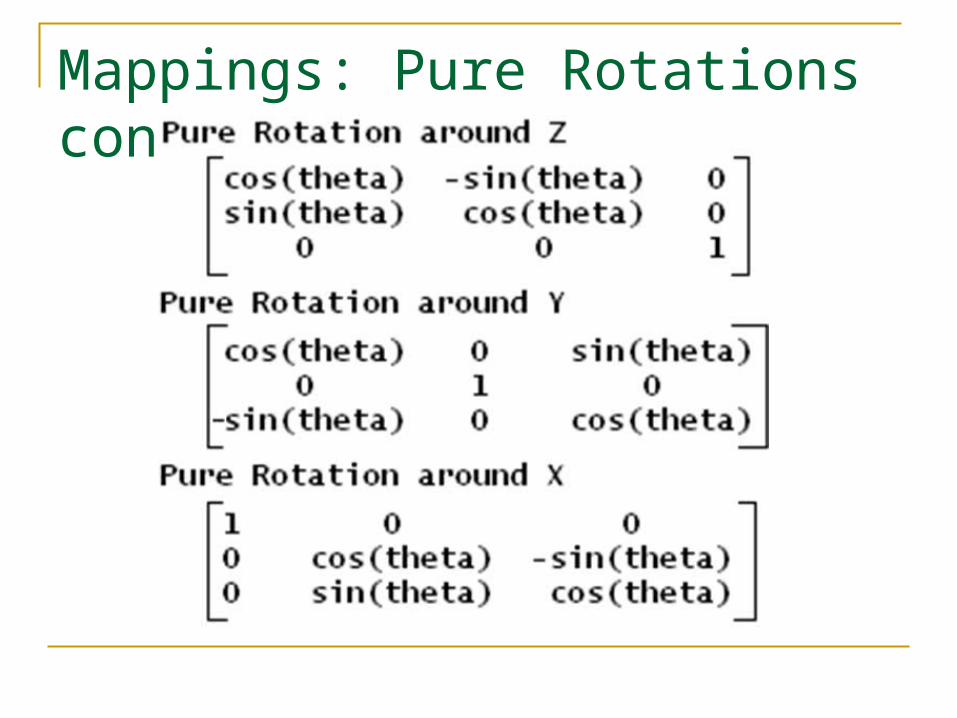
Mappings: Pure Rotations cont…
General Mappings
The two frames differ by both a translation and rotation.
AP = BP + APBORG
Example: A point BP is located at position [2 1 0]T in {B}. Frame {B} is rotated relative to frame {A} by 60o
around the Z axis. Frame {B}’s origin is translated by [3 4 0]T. What are the coordinates of the point AP in frame {A}.
RAB
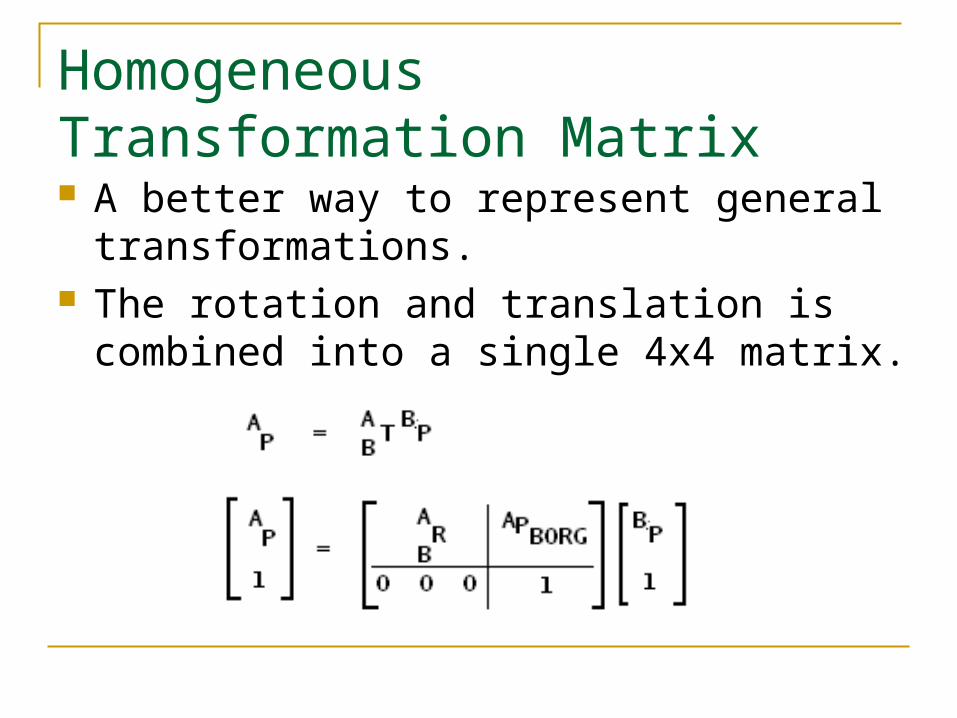
Homogeneous Transformation Matrix A better way to represent general
transformations. The rotation and translation is combined into a
single 4x4 matrix.
Homogeneous Transformation Matrices cont… A 4x4 matrix is better for writing compact
equations. The bottom row is always [0 0 0 1]
These values can be modified to represent scaling and perspective factors.
Homogeneous transformations are used to represent a coordinate system or a movement.
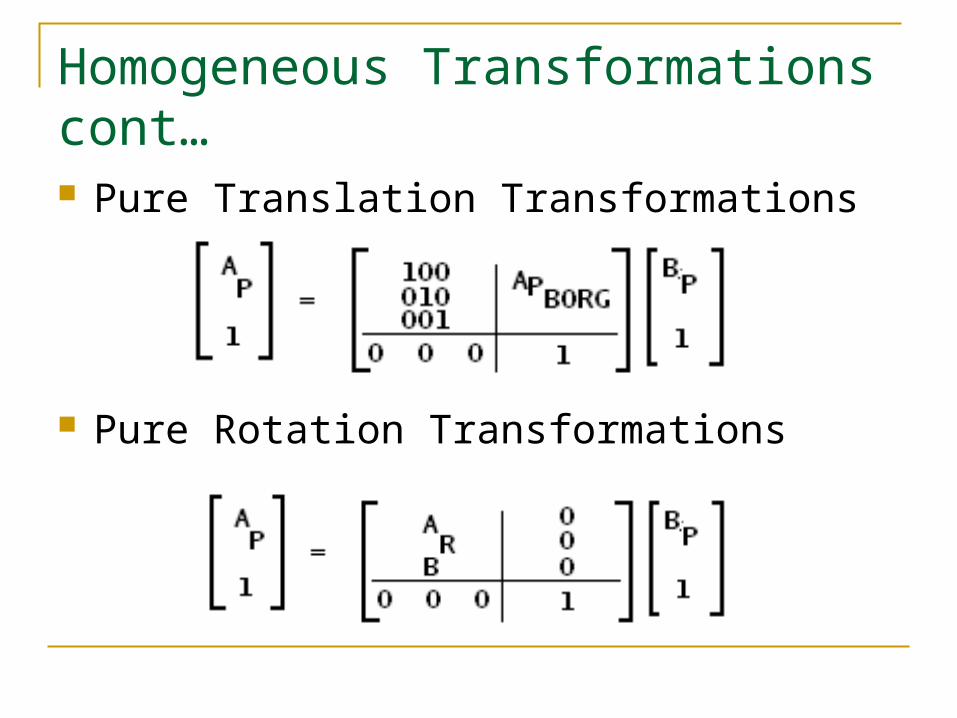
Homogeneous Transformations cont… Pure Translation Transformations
Pure Rotation Transformations
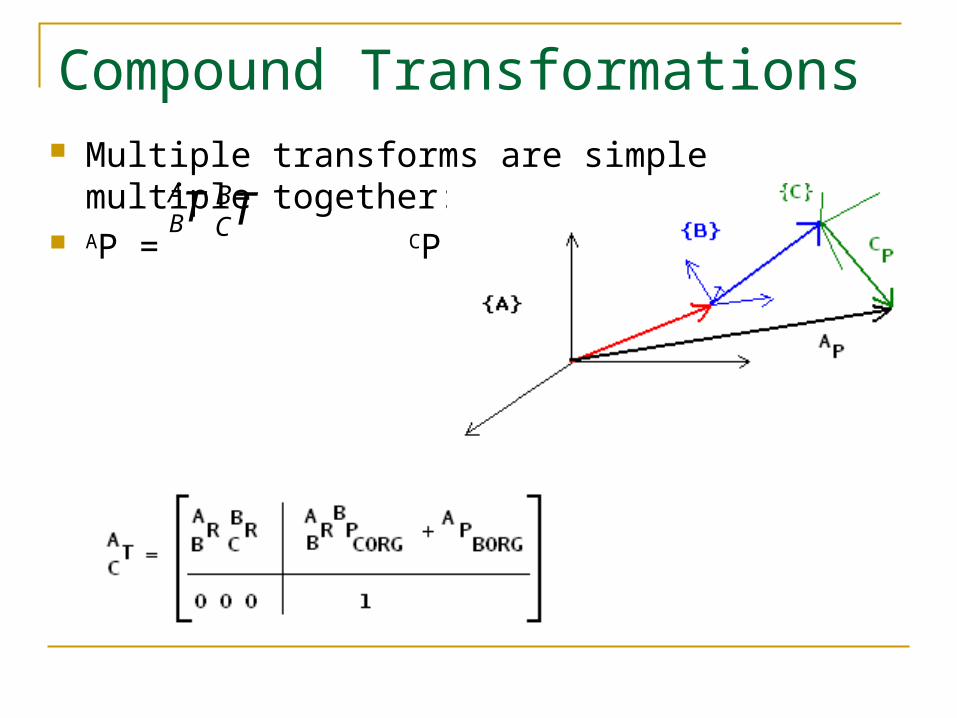
Compound Transformations Multiple transforms are simple multiple together: AP = CPTBCT
AB

Inverse of a Homogenous Transform Given need to find :
Need to find and BPAORG from and APBORG
Rotation Part: = T
Translation Part: B(APBORG) = APBORG + BPAORG
0 = APBORG + BPAORG
BPAORG = - T APBORG
TAB TBA
RBA RAB
RBA RAB
RBARBARAB
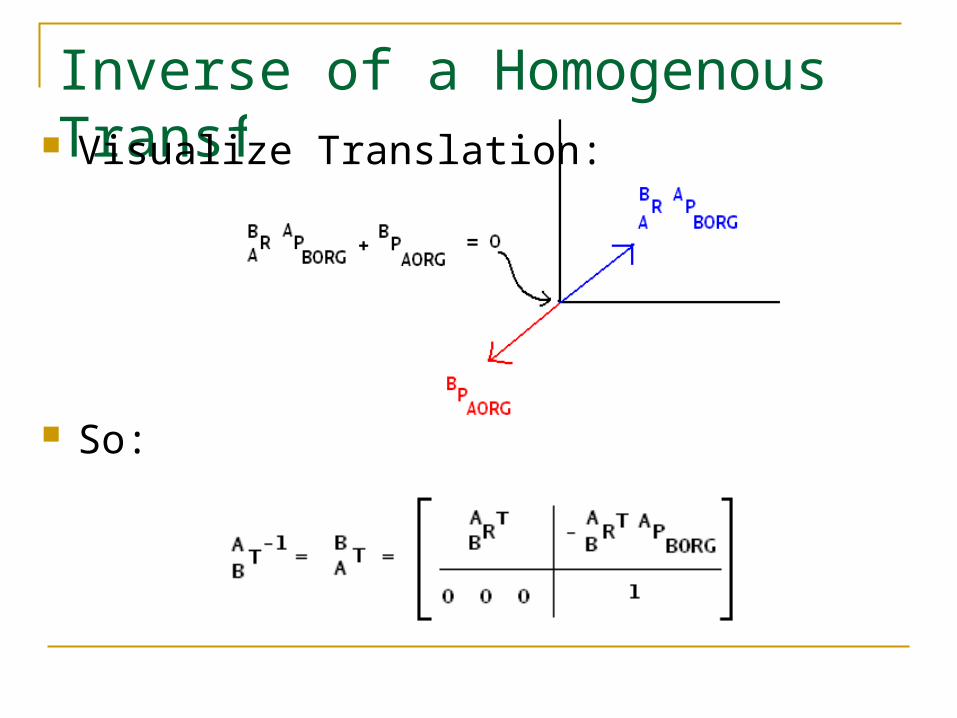
Inverse of a Homogenous Transform Visualize Translation:
So: