software multiagent systems: lecture 13 milind tambe university of southern california [email protected]
TRANSCRIPT
Teamwork
When agents act together
Understanding Teamwork
Ordinary traffic
Driving in a convoy
Two friends A & B together drive in a convoy B is secretly following A
Pass play in Soccer
Contracting with a software company
Orchestra
Understanding Teamwork
• Not just a union of simultaneous coordinated actions• Different from contracting
Together
Joint Goal
Co-labor Collaborate
Why Teamwork?Why not: Master-Slave? Contracts?
Why Teams
Robust organizations
Responsibility to substitute
Mutual assistance
Information communicated to peers
Still capable of structure (not necessarily flat)
Subteams, subsubteams
Variations in capabilities and limitations
Approach
Theory
Practical teamwork architectures
Taking a step back…
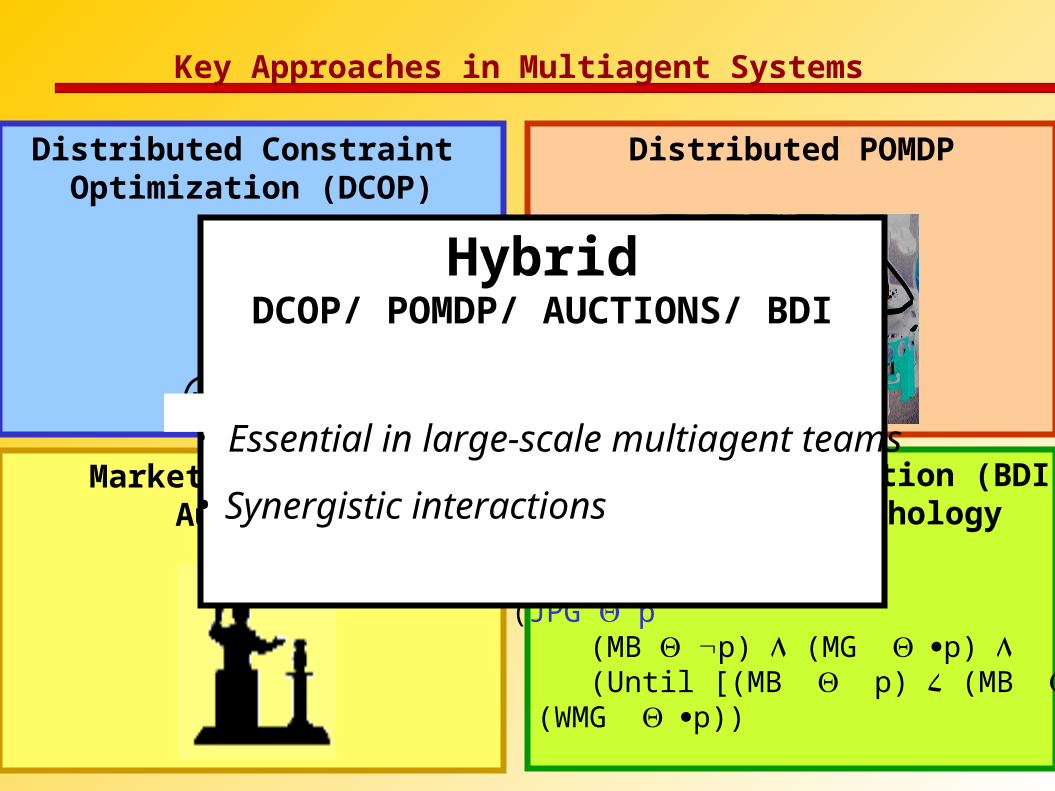
Key Approaches in Multiagent Systems
Market mechanismsAuctions
Distributed Constraint Optimization (DCOP)
x1
x2
x3 x4
Belief-Desire-Intention (BDI) Logics and Psychology
(JPG p (MB p) ۸ (MG p) ۸ (Until [(MB p) ۷ (MB p)] (WMG p))
Distributed POMDP
HybridDCOP/ POMDP/ AUCTIONS/ BDI
• Essential in large-scale multiagent teams
• Synergistic interactions
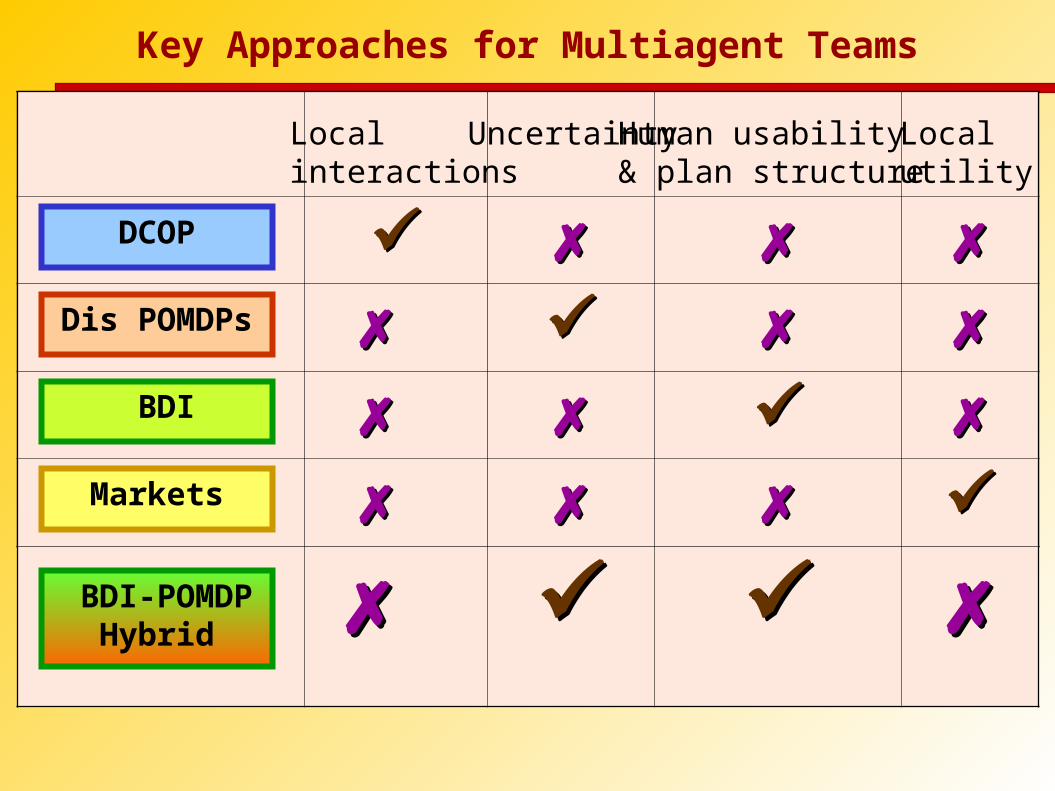
Key Approaches for Multiagent Teams
Markets
BDI
Dis POMDPs
Local interactions
Uncertainty Localutility
Human usability& plan structure
DCOP
Markets
BDI
Dis POMDPs
Local interactions
Uncertainty Localutility
Human usability& plan structure
DCOP
BDI-POMDPHybrid
Distributed POMDPs
Three papers on the web pages:What to read:
Ignore all the proofsIgnore complexity resultsJAIR article: the model and the results at the endUnderstand fundamental principles

Domain: Teamwork for Disaster Response
Multiagent Team Decision Problem (MTDP)
MTDP: < S, A, P, R>
S: s1, s2, s3…
Single global world state, one per epoch
A: domain-level actions; A = {A1, A2, A3,…An}
Ai is a set of actions for each agent i
Joint action
MTDP
P: Transition function:
P(s’ | s, a1, a2, …an)
RA: Reward
R(s, a1, a2,…an)
One common reward; not separate
Central to teamwork
MTDP (cont’d)
: observations
Each agent: different finite sets of possible observations
O: probability of observation
O(destination-state, joint-action, joint-observation)
P(o1,o2..om | a1, a2,…am, s’)
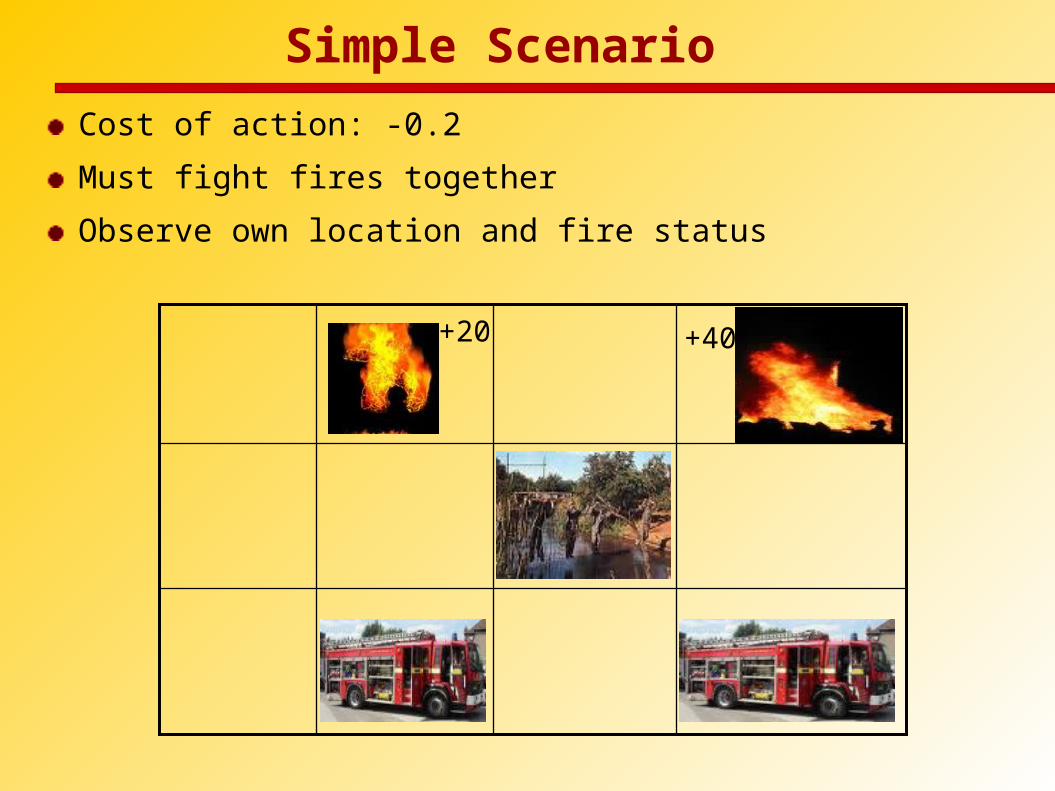
Simple Scenario
Cost of action: -0.2
Must fight fires together
Observe own location and fire status
+20 +40
MTDP Policy
he problem: Find optimal JOINT policies
One policy for each agent
i: Action policy
Maps belief state into domain actions
(Bi A) for each agent
Belief state: sequence of observations
MTDP Domain Types
Collectively partially observable: general case, no assumptions
Collectively observable: Team (as a whole) observes state
For all joint observations, there is a state s, such that, for all other states s’ not equal to s, Pr (o1,o2…on | s’) = 0
Pr (o1, o2, …on | s ) = ?
Pr (s | o1,o2..on) = ?
Individually observable: each agent observes the state
For all individual observations, there is a state s, such that for all other states s’ not equal to s, Pr (oi | s’) = 0
From MTDP to COM-MTDP
Two separate actions: communication vs domain actions
Two separate reward types:
Communication rewards and domain rewards
Total reward: sum two rewards
Explicit treatment of communication
Analysis
Communicative MTDPs(COM-MTDPs)
: communication capabilities, possible “speech acts”
e.g., “I am moving to fire1.”
R: communication cost (over messages)
e.g., saying, “I am moving to fire1,” has a cost
RWhy ever communicate?
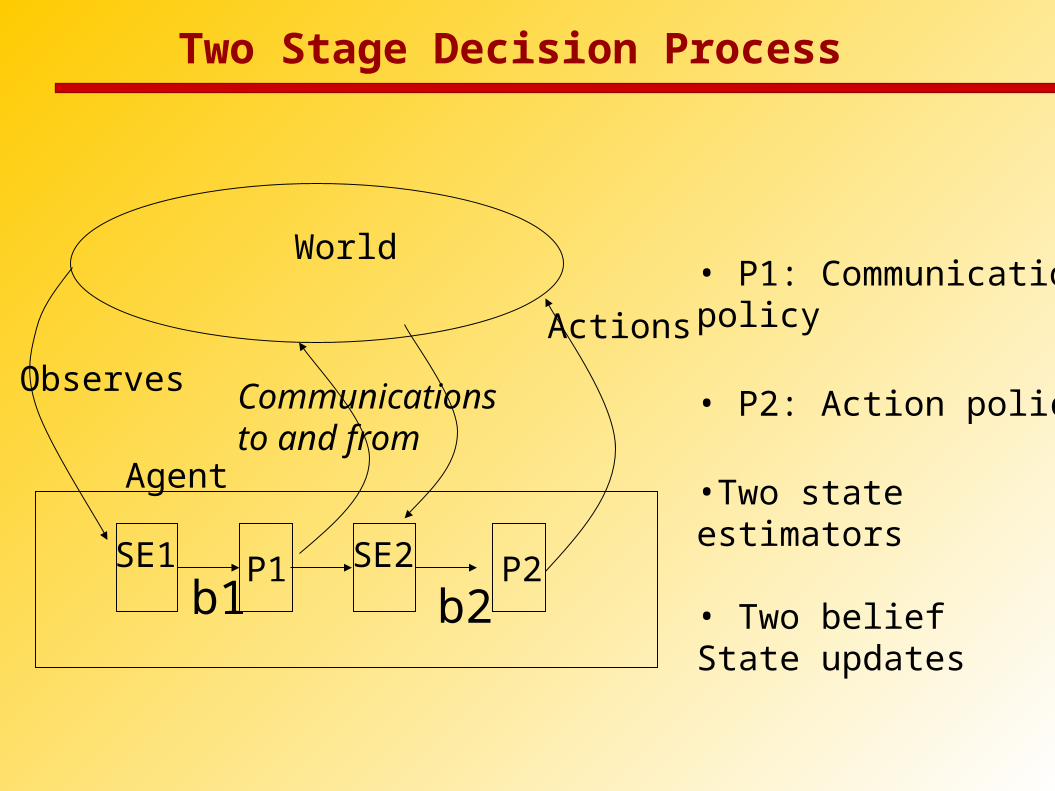
Two Stage Decision Process
Agent
World
Observes
Actions
SE1 P1b1
P2SE2
b2
Communicationsto and from
• P1: Communicationpolicy
• P2: Action policy
•Two state estimators
• Two beliefState updates
COM-MTDP Continued
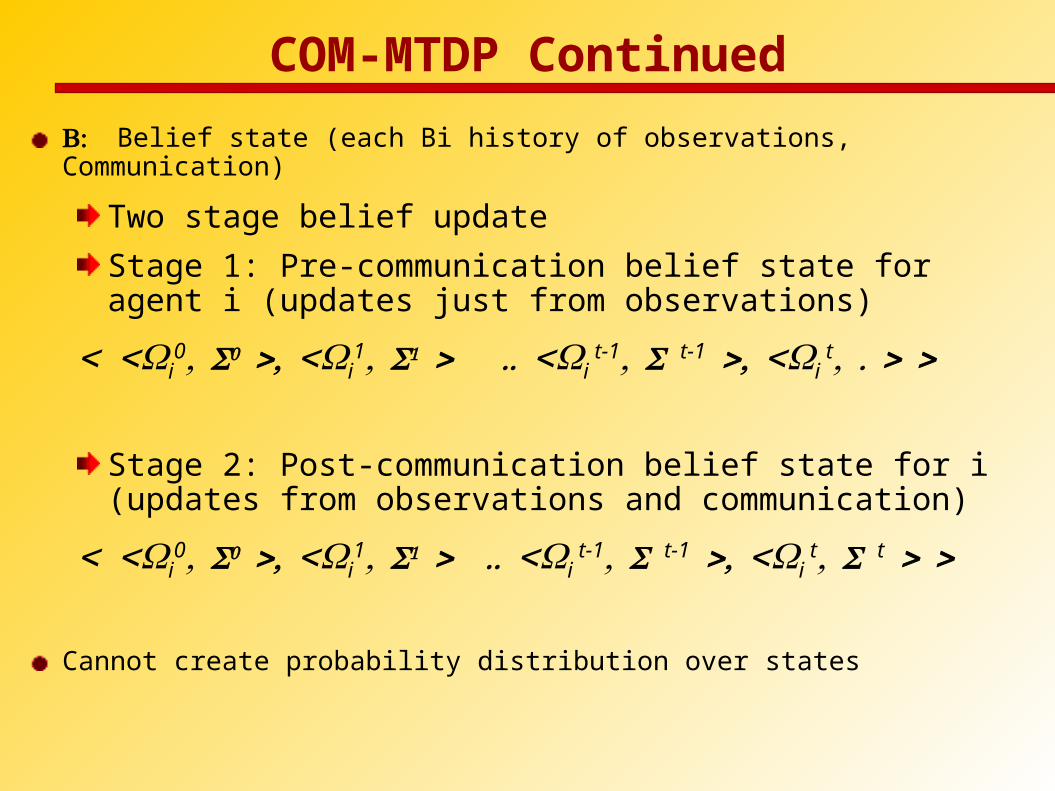
Belief state (each Bi history of observations, Communication)
Two stage belief update
Stage 1: Pre-communication belief state for agent i (updates just from observations)
i0i
1i t-1t-1i
t
Stage 2: Post-communication belief state for i (updates from observations and communication)
i0i
1i t-1t-1i
tt
Cannot create probability distribution over states
COM-MTDP Continued
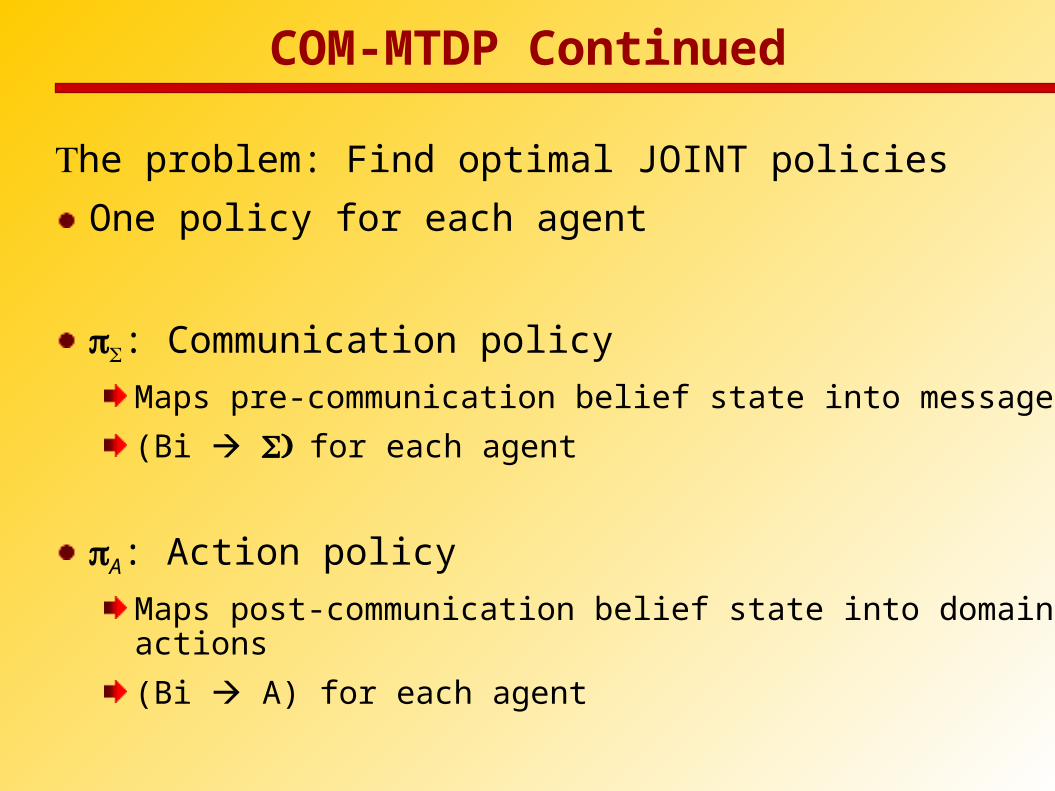
he problem: Find optimal JOINT policies
One policy for each agent
: Communication policy
Maps pre-communication belief state into message
(Bi for each agent
A: Action policy
Maps post-communication belief state into domain actions
(Bi A) for each agent
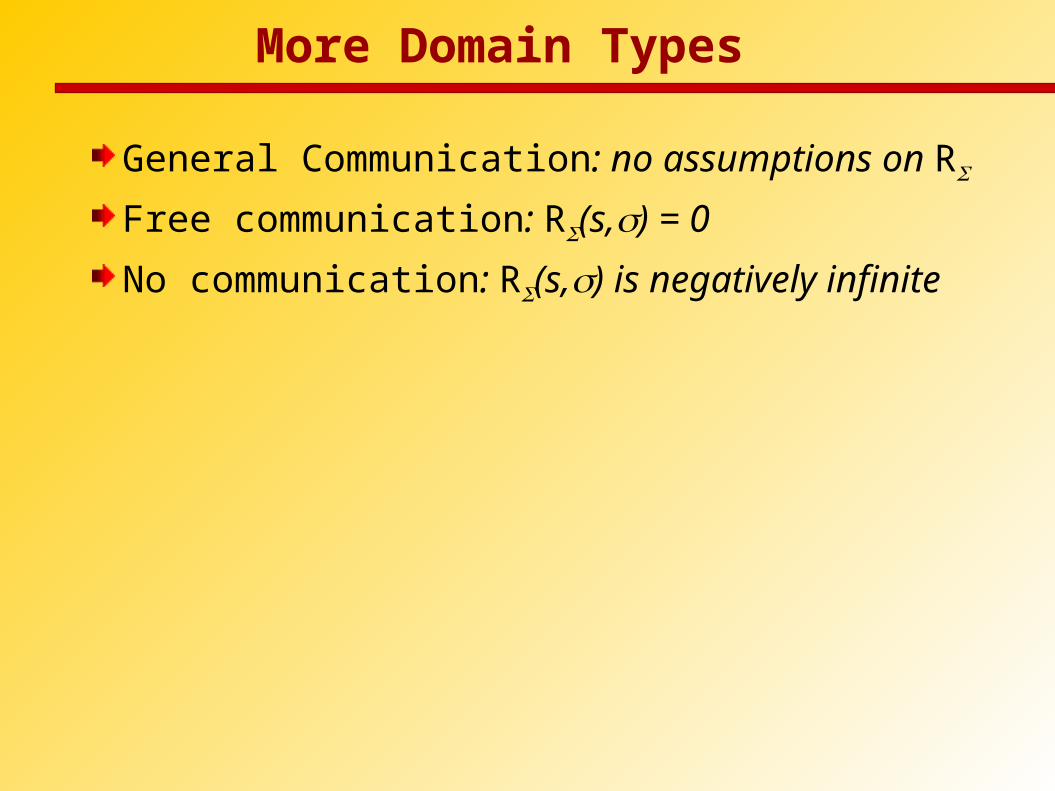
More Domain Types
General Communication: no assumptions on R
Free communication: R(s,) = 0
No communication: R(s,) is negatively infinite
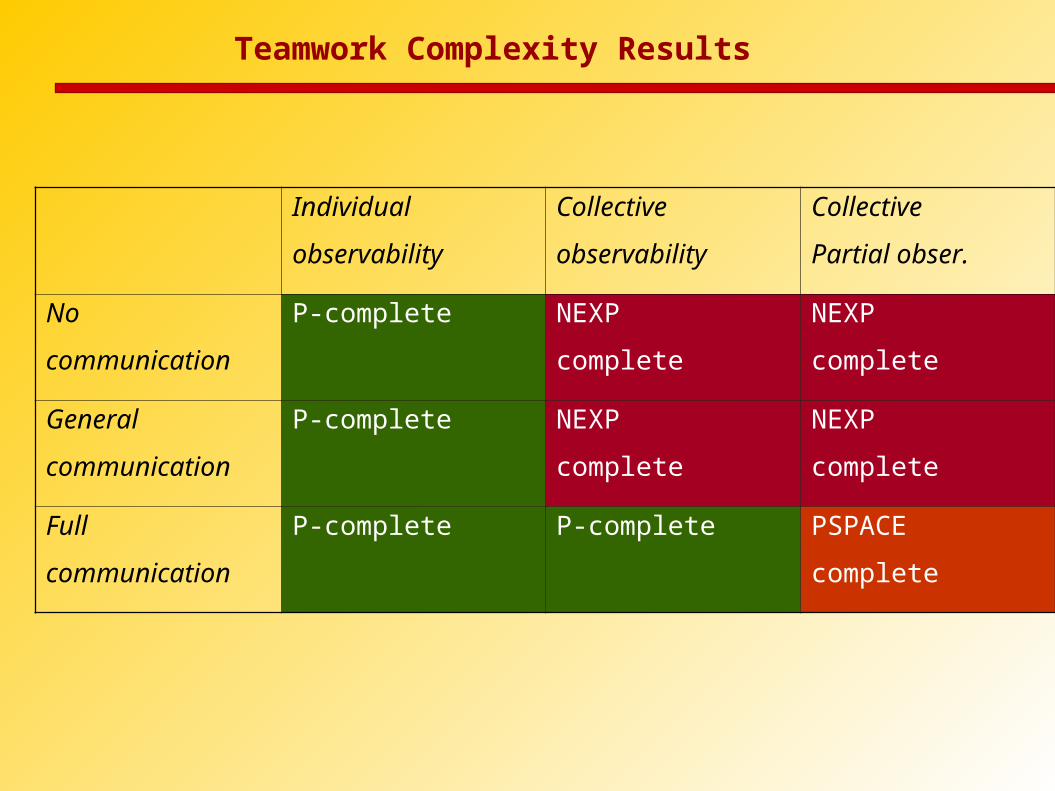
Teamwork Complexity Results
Individual
observability
Collective
observability
Collective
Partial obser.
No
communication
P-complete NEXP
complete
NEXP
complete
General
communication
P-complete NEXP
complete
NEXP
complete
Full
communication
P-complete P-complete PSPACE
complete
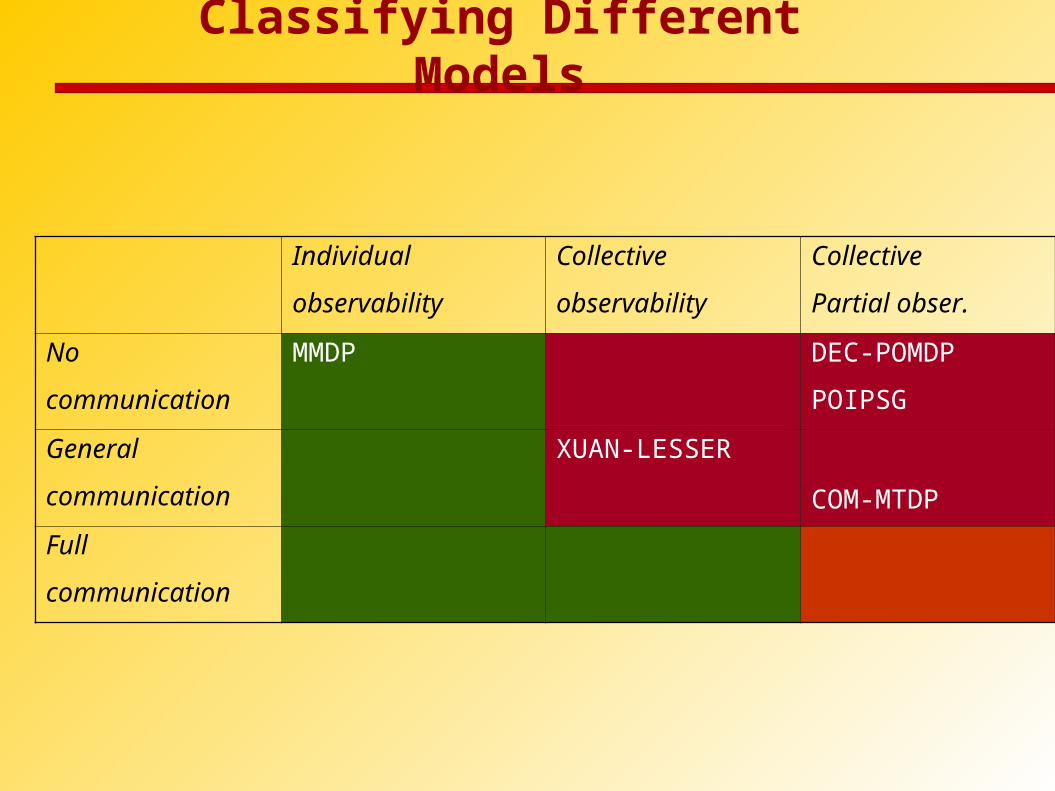
Classifying Different Models
Individual
observability
Collective
observability
Collective
Partial obser.
No
communication
MMDP DEC-POMDP
POIPSG
General
communication
XUAN-LESSER
COM-MTDP
Full
communication
True or False
If agents communicated all their observations at each step then the distributed POMDP would be essentially a single agent POMDP
In distributed POMDPs, each agent plans its own policy
Solving Distributed POMDPs with two agents is of same complexity
as solving two separate individual POMDPs
Algorithms
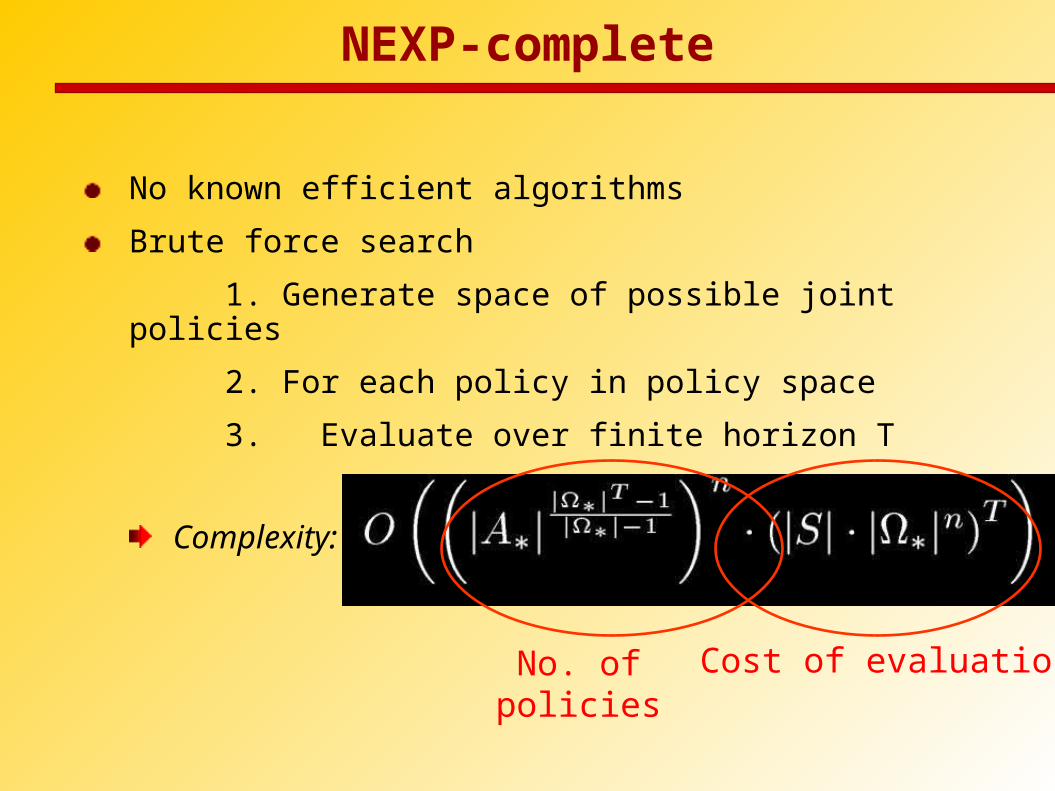
NEXP-complete
No known efficient algorithms
Brute force search
1. Generate space of possible joint policies
2. For each policy in policy space
3. Evaluate over finite horizon T
Complexity:
No. of policies Cost of evaluation
Locally optimal search
Joint equilibrium based search for policiesJESP
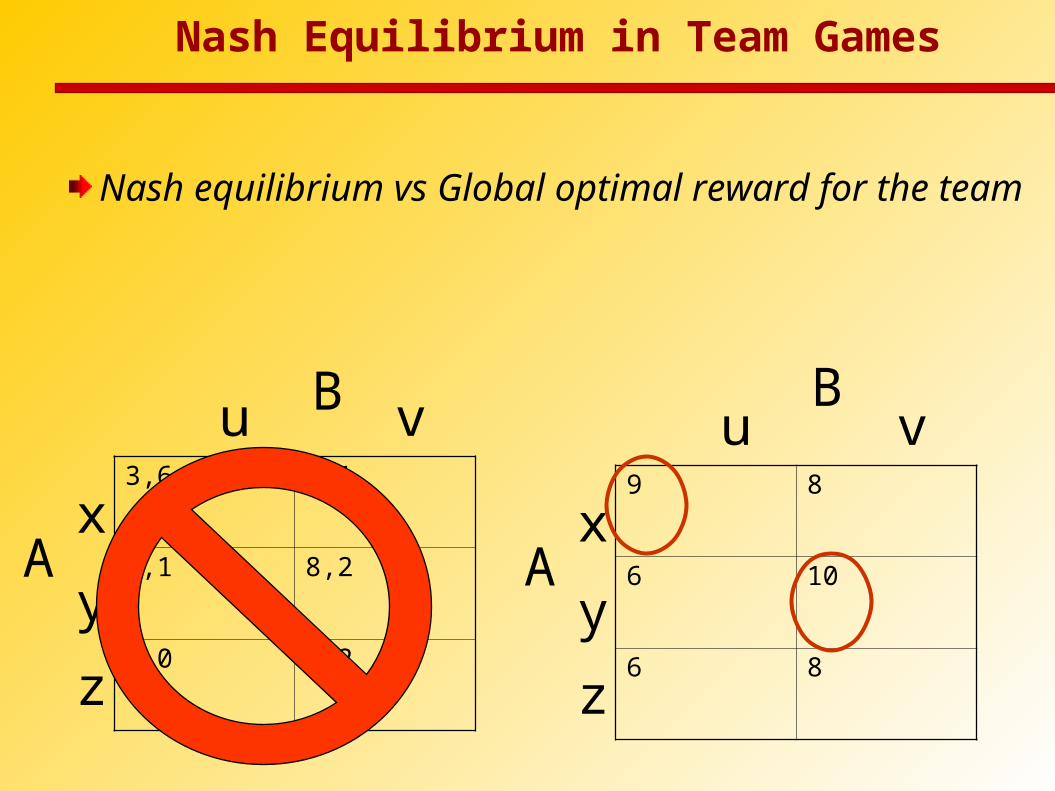
Nash Equilibrium in Team Games
Nash equilibrium vs Global optimal reward for the team
3,6 7,1
5,1 8,2
6,0 6,2
x
y
z
u v
A
B
9 8
6 10
6 8
x
y
z
u v
A
B
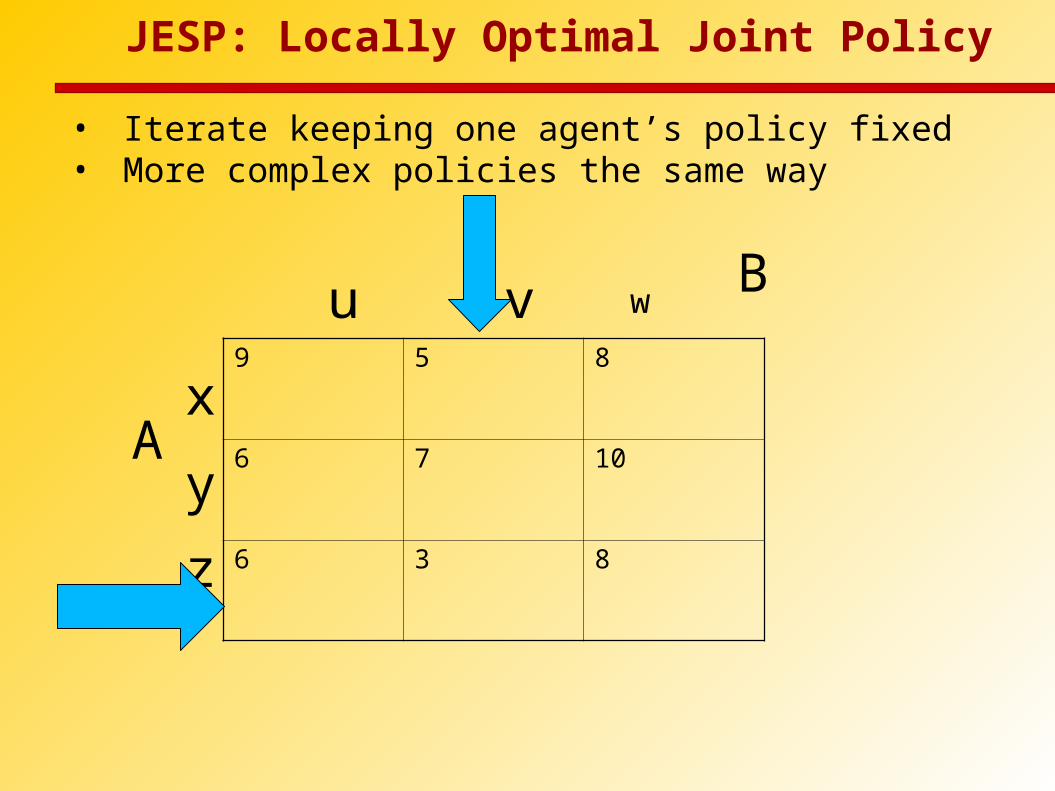
JESP: Locally Optimal Joint Policy
9 5 8
6 7 10
6 3 8
x
y
z
u v
A
Bw
• Iterate keeping one agent’s policy fixed• More complex policies the same way
Joint Equilibrium-based Search
Description of algorithm:
1. Repeat until convergence
2. For each agent i
3. Fix policy of all agents apart from i
4. Find policy for i that maximizes joint reward
Exhaustive-JESP:
brute force search in policy space of agent I
Expensive
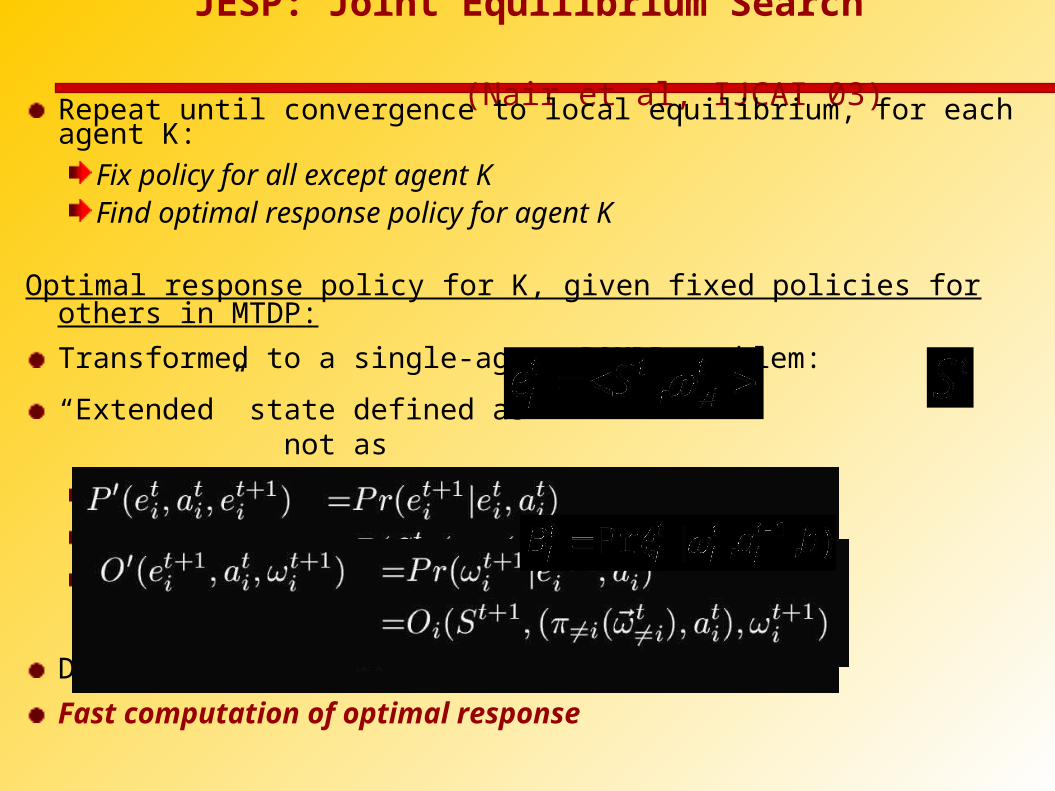
JESP: Joint Equilibrium Search (Nair et al, IJCAI 03)
Repeat until convergence to local equilibrium, for each agent K:
Fix policy for all except agent KFind optimal response policy for agent K
Optimal response policy for K, given fixed policies for others in MTDP:
Transformed to a single-agent POMDP problem:
“Extended” state defined as not as
Define new transition function
Define new observation function
Define multiagent belief state
Dynamic programming over belief states
Fast computation of optimal response
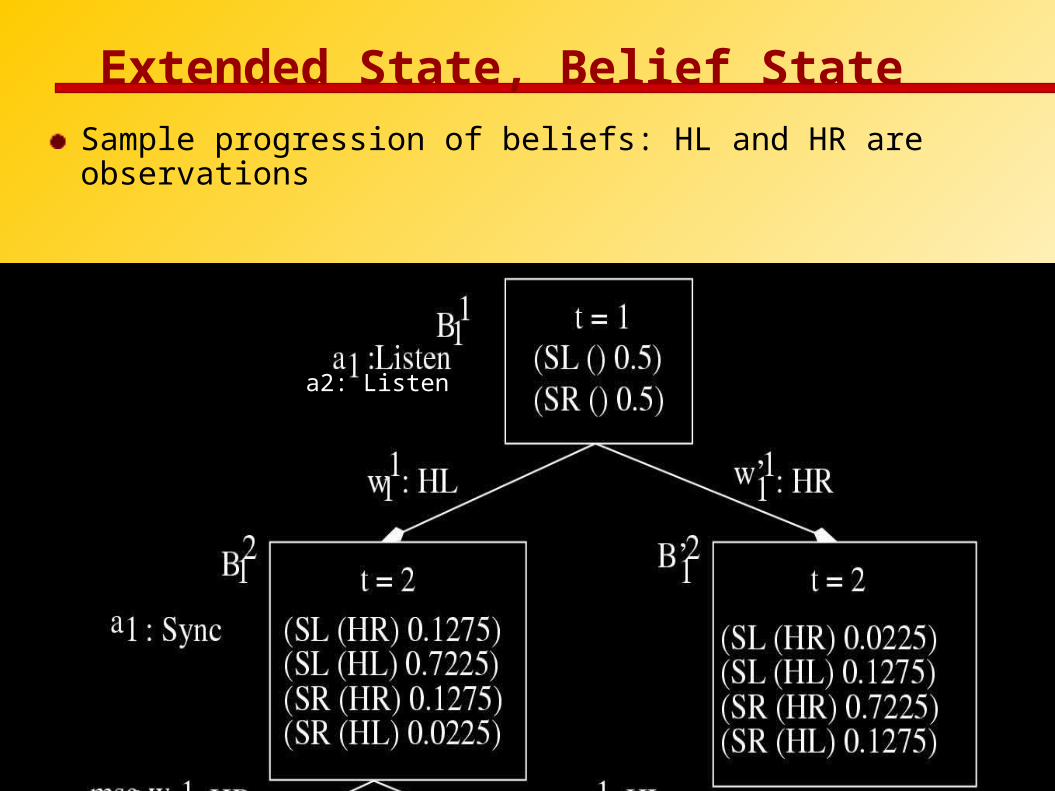
Extended State, Belief StateSample progression of beliefs: HL and HR are observations
a2: Listen
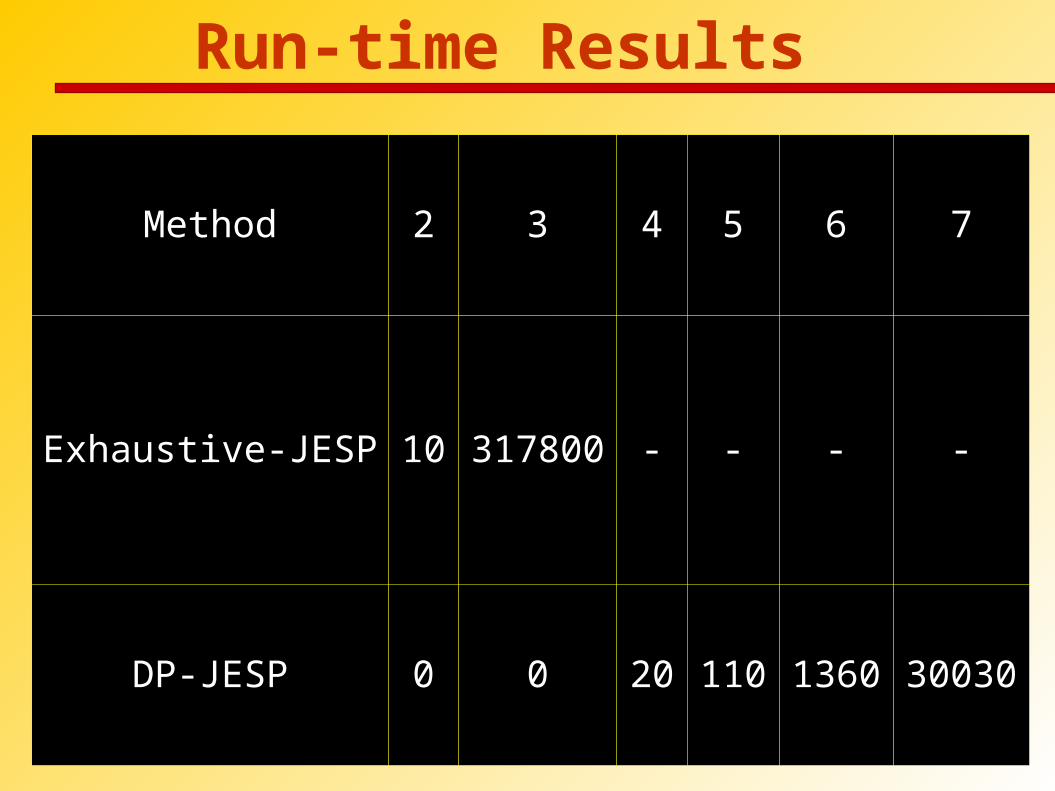
Run-time Results
Method 2 3 4 5 6 7
Exhaustive-JESP 10 317800 - - - -
DP-JESP 0 0 20 110 1360 30030

Is JESP guaranteed to find the global optimal?
Random restarts
9 5 8
6 7 10
6 3 8
Not All Agents are Equal
Scaling up Distributed POMDPs for Agent Networks
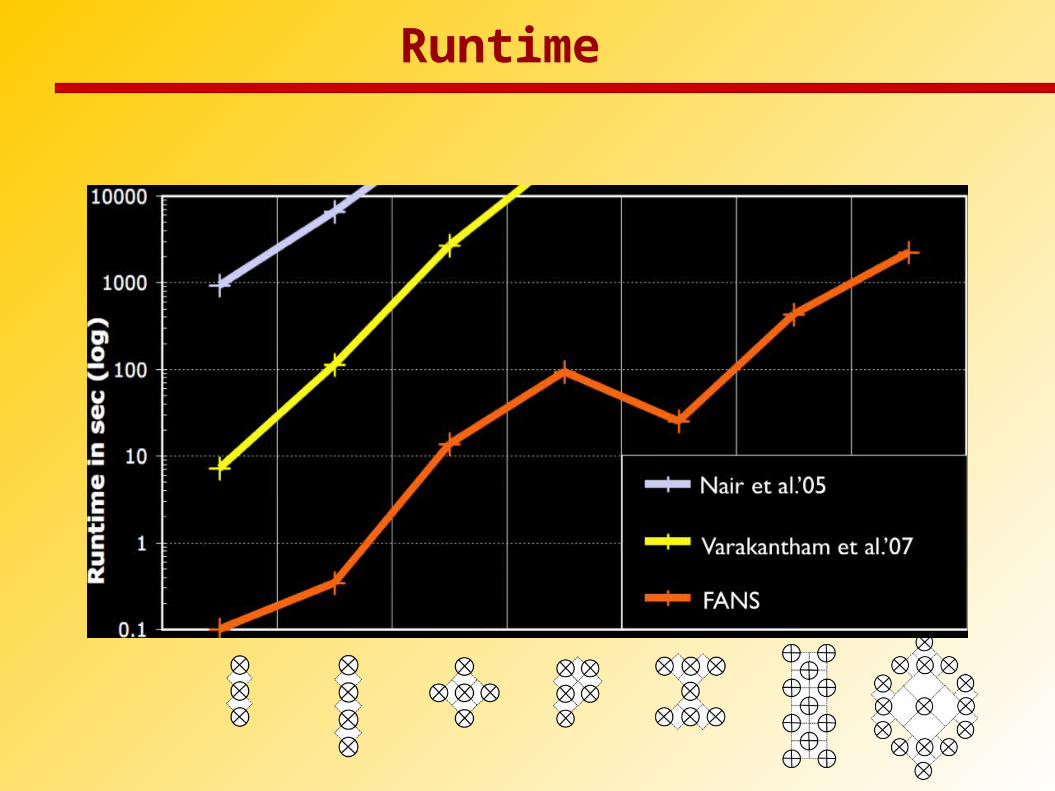
Runtime
POMDP vs. distributed POMDP
Distributed POMDPs more complex
Joint transition and observation functions
Better policy
Free communication = POMDP
Less dependency = lower complexity
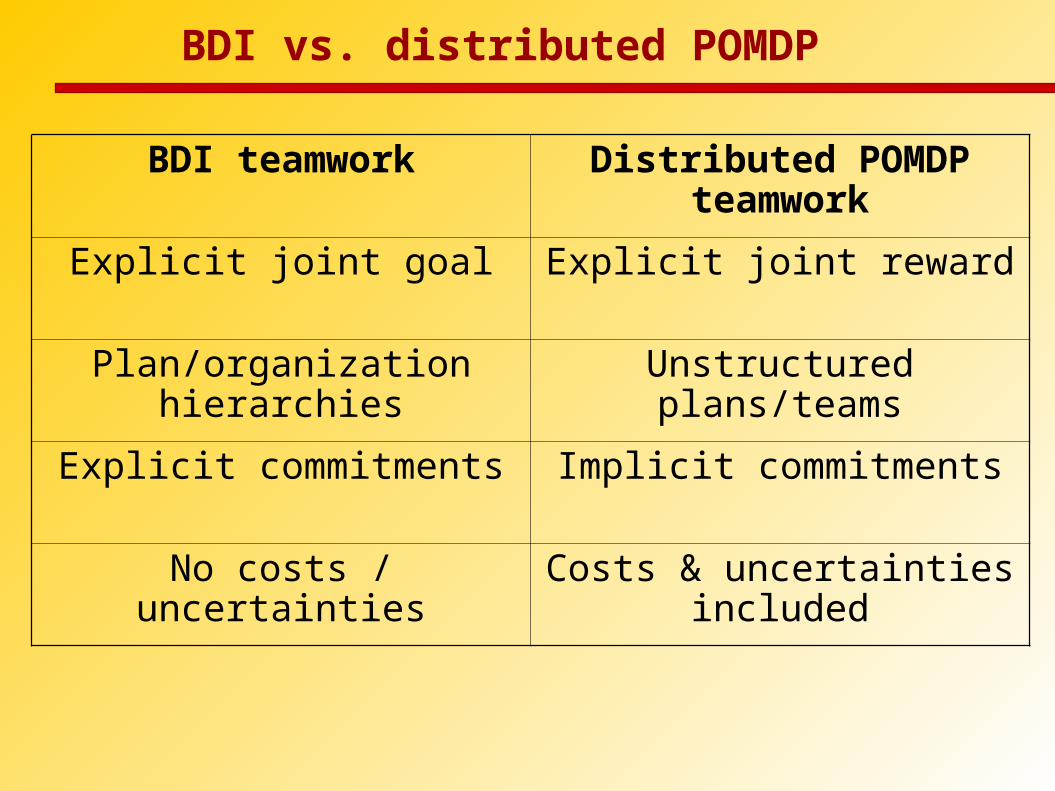
BDI vs. distributed POMDP
BDI teamwork Distributed POMDP teamwork
Explicit joint goal Explicit joint reward
Plan/organization hierarchies Unstructured plans/teams
Explicit commitments Implicit commitments
No costs / uncertainties Costs & uncertainties included