software enablement blue box v2.0: adas sensor …
TRANSCRIPT

NXP and the NXP logo are trademarks of NXP B.V. All other product or service names are the property
of their respective owners. © 2017 NXP B.V.
PUBLIC
FIELD SOFTWARE SOLUTIONS
REV 0.5
MARK DOUGLAS
SOFTWARE ENABLEMENT
BLUE BOX V2.0: ADAS SENSOR
FUSION PLATFORM
AMF-AUT-T2666 | JUNE 2017

PUBLIC 1
AGENDA
• ADAS sensor fusion needs
• The Blue Box v2.0
• Linux enablement
• Discussion of middleware
• Level 2/3 ADAS Proof of Concept (POC)
• Forthcoming NXP ADAS development kit

PUBLIC 2
Goals of this session:
• Understanding of ADAS sensor fusion needs
• What the Blue Box v2.0 can support
• Linux enablement for this ADAS platform
• What Middleware/HALs run on it
• 3rd Party and NXP POC running level 2+
• Forthcoming NXP ADAS development kit

PUBLIC 3
Access/ Door/.. Control
PUBLIC 4
ADAS Sensor Fusion needs
01.

PUBLIC 5
Levels of Autonomy
Responsibility for safe operation Control of complete vehicle Control of steering Control of vehicle speed
LEVEL 1
Driver Assistance
LEVEL 2
Partial Automation
LEVEL 3
Conditional
Automation
• Adaptive cruise control
• Automatic braking
• Lane keeping
• Partial automated parking
• Traffic jam assistance
• Emergency brake with steer
• Semi autonomous:
−Highway chauffeur
−Self parking
• Human driver can regain
control
ADAS
Driver
Vehicle or
Driver
Vehicle
Driver
Vehicle
LEVEL 4
High Automation
• Autonomous driving in
some driving modes
• Human driver may not
respond to request to
intervene
Driver
Vehicle
Safe Autonomous System
LEVEL 5
Full Automation
• Fully autonomous under
all driving modes
• Human driver not
expected to respond to
request to intervene
Driver
Vehicle
SAE. (2014). AUTOMATED DRIVING LEVELS OF DRIVING AUTOMATION. SAE INTERNATIONAL STANDARD J3016.
Feet Off
Hands Off
Eyes Off
Brain Off
Here is where we are going
to focus in this presentation

PUBLIC 6
Typically what is needed for ADAS
What is ADAS? –“Advanced Driver Assist System” that includes
− Level 2/3 autonomy or what we are calling “Level 2+”
Examples are highway autonomy:
lane detection lane centering intelligent lane change
intelligent cruise emergency breaking
− Forward facing type applications
− Intelligent sensors pre-processed data (the data seen is not raw)
− Combines mostly: Radar and Camera data (can support LiDAR)
− Not that complex in the sensor fusion domain due to pre-processed data

PUBLIC 7
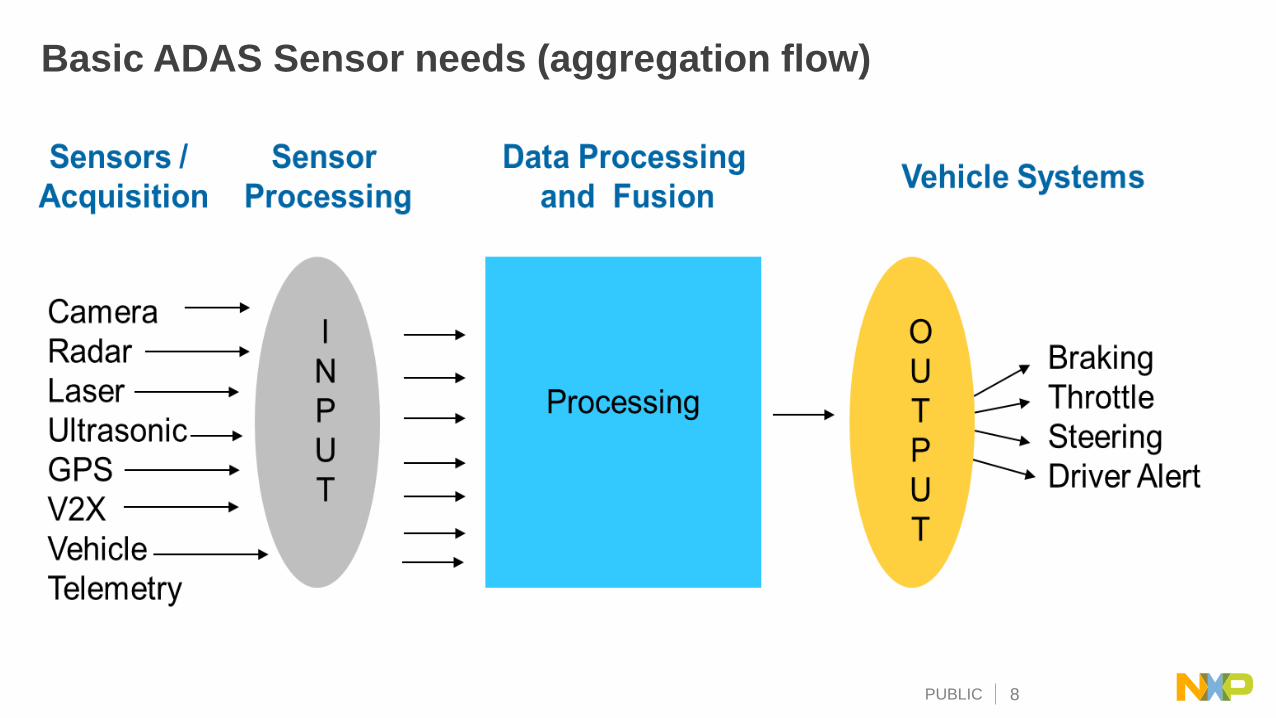
ADAS Sensor needsOur focus is on the forward-facing
Camera and RADAR sensors
PUBLIC 8
Basic ADAS Sensor needs (aggregation flow)

PUBLIC 9
Typical ADAS software Sensor needs
• hw/sw platform to accommodate Level 2/3 type autonomy
− Network (Ethernet), MIPI, CAN and other interfaces
− Functionally Safe + high performance fusion processing
• Operating System enablement for I/O
• HAL middleware to isolate your fusion layers from the O/S and other target
specifics
− bringing in messaging and other features
• Sensor hander nodes and fusion
• Connection to the drive by wire or vehicle domain interface(s)

PUBLIC 10
The Blue Box Mini: ADAS Dev Platform
02.

PUBLIC 11
BlueBox v2.0 – standard case, sheet metal with fan

PUBLIC 12
NXP BlueBox 2.0 (Mini)
• A prototyping platform for Level 2/3 ADAS applications
• Covers scaled software support and processing needs
− High performance compute with 16GB DDR4 and 250GB SSD
− ASIL-B compute, automotive interfaces, with vision acceleration
− ASIL-D subsystem, with dedicated interfaces
• Numerous interfaces
− Ethernet 100M/1G/10G, SFP+, 8*100BASE-T1,
• Ships with near desktop Linux for ease of use
− Allows for ease of porting from PC platforms
− Also Ubuntu-like environment for the LS2084A (possibly for the S32V)
PUBLIC 13
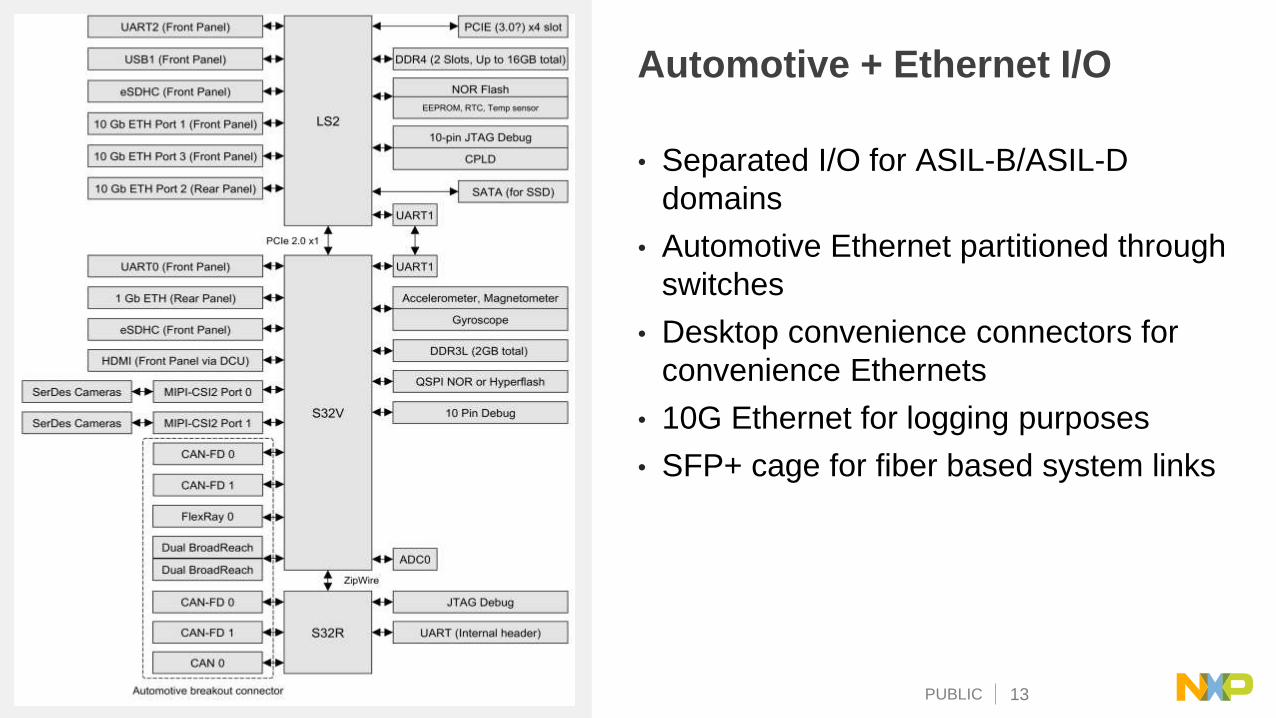
Automotive + Ethernet I/O
• Separated I/O for ASIL-B/ASIL-D
domains
• Automotive Ethernet partitioned through
switches
• Desktop convenience connectors for
convenience Ethernets
• 10G Ethernet for logging purposes
• SFP+ cage for fiber based system links

PUBLIC 14
Infrastructure
• Large Boot Flashes
• Standard JTAG debug accessibility
• Slots for PCIe x4 and MIPI signals
• Console UARTs available on front panel
• MicroSD cards in latching slots
• Convenience connectors for prototyping

PUBLIC 15
Classic SDKs + ADAS support SW
03.
PUBLIC 16
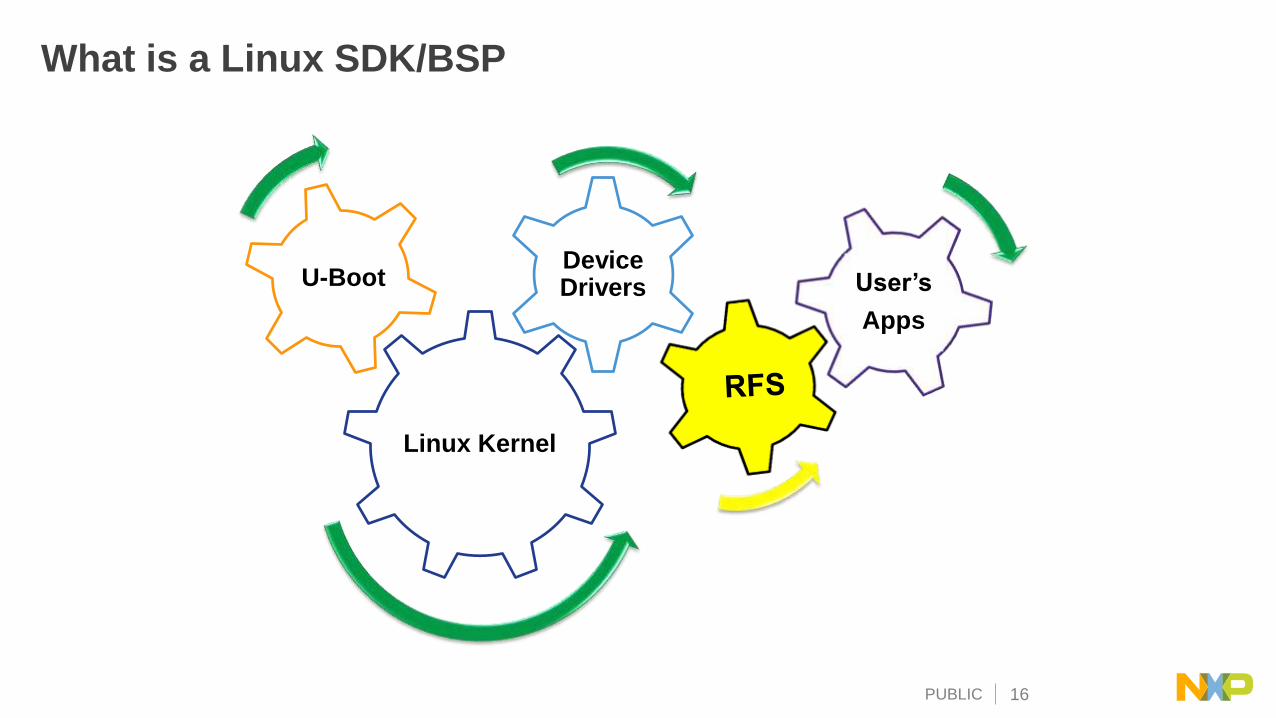
What is a Linux SDK/BSP
Device DriversU-Boot
Linux Kernel
User’s
Apps

PUBLIC 17
Overview of sensor fusion software stack ADAS
• What is needed for a software platform to get started?
COMMUNICATION
UART
ENET
CAN
PCIEXPRESS
I2C
DSPI
STORAGE
SD
EMMC
QSPI
GRAPHICS
DCU
FRAMEBUFFER
GPU
VIU
ENCODERS
SECURITY
CRYPTO
SECUREBOOT
BLUEBOX Mini (LS2084A and S32V)
SOC
TIMERS
PINMUX
GPIO
CLOCKS
INTERRUPTS
WDG
MIDDLEWARE
ROS or 3rd Party Middleware
TOOLS
Sensor Fusion SAMPLES3rd party and NXP APPLICATIONS
ICC
ROOTFS (Ubuntu rootfs) UTILITIES
LIBRARIES
DOCUMENTATION
BOOTLOADERSUBOOT
UEFI

PUBLIC 18
ADAS Middleware Services
04.

PUBLIC 19
Why are these middleware stacks needed for ADAS?
Operating Systems do not usually include these features:
• Sensor node messaging
− Communication bridge between sensor hander nodes
− Inter-node or process communications
• Time synchronization
− Relative sensor timing
• Distributed and coordinated functionality
• Addition sensor data synchronization with algorithm development tools
• (key feature) Application Hardware Abstraction Layer (HAL) which allows for fusion mobility

PUBLIC 20
Robot Operating System (ROS) Features
Node 1
Laser Scanning
Node 2:
Map Building
Node 3:
Planning
(C) File-system level: ROS Tools for managing source code, build instructions,
and message definitions.
Node 4 (B) Computation Graph: Peer-to-Peer Network of
ROS nodes (processes).
Node 5
Node 6Node7
Carnegie Mellon
(A) ROS Community: ROS Distributions, Repositories

PUBLIC 21
Key ROS Features (continued)
• publish/subscribe anonymous message passing
− communication between distributed nodes via the anonymous publish/subscribe mechanism
− message interfaces is defined in the message IDL (Interface Description Language)
• recording and playback of messages
− publish/subscribe system is anonymous and asynchronous
− the data can be easily captured and replayed without any changes to code
• request/response remote procedure calls
− synchronous request/response interactions between processes
• distributed parameter system
− share configuration information

PUBLIC 22
LEVEL 2+ AUTONOMY POC
05.

PUBLIC 23
Access/ Door/.. Control
NXP/3rd Party POC - Demo
Highway Level 2+
Features:
highway speeds: Lane centering, Adaptive cruise, Traffic jam assist & Intelligent lane
change
All processing done on the A72 cores NXP LS2084ARDB target under 8-way SMP Linux
Sensors: ESR 2.5, Mobileye 660, and the Vehicle DBW interface
All processed data was sent from the 2088 to the PC via Ethernet

PUBLIC 24
NXP & 3rd Party: software stack & demo
3rd party ARMv8-based sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
LS2084ARDB Target
ROS Kinetic (Master)
NovaTel
ProPak 6
EthernetEthernetEthernet
ROS Kinetic (Slave)
PC for displays (HMI) Ethernet EthernetUSB
ROS_MASTER_URI
multi machine
connection over Ethernet
3rd party ROS sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
Kvaser single
CAN
USB to CAN
Vehicle Drive by Wire interface
Delphi ESR 2.5
Radar
Mobileye
660
USB Hub
Kvaser Single CAN
channel device for each
USB to CAN
Delphi SRR2 Radars
NOTE: Integrated
into the Vehicle
Ethernet
Delphi SRR2 Radars
NOTE: Integrated
into the Vehicle
Displays

PUBLIC 25
NXP Blue Box Mini
Moving the Highway Software to the Blue Box Mini
LS2084A
3rd party ARMv8-based sensor fusion nodes
SMP Linux + Ubuntu root file system +
HAL support packages
ROS Kinetic
USB
Ethernet
P0
Ethernet
P2
Ethernet
P3
PCIe Host
S32V SoC on BBM Target PCIe End Point seen as
a network interface
Single
Camera MIPI
(replacing
MobileEye
Virtual Ethernet
Interface (PCIe0)
Ubuntu Linux
User-Space
Ubuntu Linux kernel-space
MIPI
Driver
3rd party ADAS
ROS Kinetic
3rd party ARMv8-based camera nodeVirtual Ethernet
Interface (PCIe0)
NovaTel
ProPak 6
USB Hub Kvaser USB to
CAN
Drive by wire RADAR
3rd party ADAS APIs accessed to
3rd party nodes for lane and
vehicle detection
ROS multi-machine messaging is
used to share camera node results
vEthernet provides
standard API

PUBLIC 26
Virtual Ethernet – Use Case
• BlueBox v2.0
• Communication between LS2
and S32V inside BlueBox
• Standard endpoint
configuration: “ifconfig”
• Ping test
• ROS multi-machine test
$ ifconfig pcie0 192.168.1.1 $ ifconfig pcie0 192.168.1.2
LS2 S32V
Linux LinuxPCIe
Communication
$ ping 192.168.1.2
PING 192.168.1.2 56(84) bytes of data.
64 bytes from 192.168.1.2: time=0.34 ms
64 bytes from 192.168.1.2: time=0.35 ms

PUBLIC 27
Virtual Ethernet
• Standard API
• Simplify the inter-communication
specification
• Ease of use using standard
network socket
• No difference than standard
ETH interfaceIPFC
ARM/
PowerPC
Data-link abstraction layer
USB SPIUARTShared
mem
MCAPIVirtual ETH
TCP/IP stack
ETH
vSomeIP/ OpenSSL
Applications

PUBLIC 28
Future Integration of the research
development platform: possible
use-case options
06.

PUBLIC 29
Distributive Use Cases Multi-SoC sensor handlers controlled across networked SoCs
3rd party ARMv8-based
Master sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
LS2/LS1 Target/other ARM-64
USB
USB to CAN
Vehicle Drive by Wire interface
PCIe
middleware (Master)
Ethernet Ethernet
3rd party ARMv8-based
Slave sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
USBPCIe
middleware (Slave)
Ethernet Ethernet
3rd party ARMv8-based
Slave sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
USBPCIe
middleware (Slave)
Ethernet Ethernet
3rd party ARMv8-based
Slave sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
USBPCIe
middleware (Slave)
Ethernet Ethernet
LS2/LS1 Target/other ARM-64 LS2/LS1 Target/other ARM-64 LS2/LS1 Target/other ARM-64
3rd party sensor node management across the SoC-based ECUs
Key #1 management of sensor handlers across networked
ECUs: management node can enable/disable selective
monitors
sensors sensors sensors sensors
USB to CAN USB to CAN USB to CAN
Key #2: multi-monitoring sensor nodes for maximum up-
time and collaboration
Key #3 field up-grade management with
max up-time: monitor node manages
application upgrades

PUBLIC 30
Redundant sensor monitor exampleTwo independent modules operating on the single Ethernet sensor data
Vehicle Drive by Wire interface
3rd party ARMv8-based
Master sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
USBPCIe
ROS 2.0 (Master)
Ethernet Ethernet
3rd party ARMv8-based
Slave sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
USBPCIe
ROS 2.0 (slave)
Ethernet Ethernet
LS2/LS1 Target LS2/LS1 Target
sensorUSB to CAN USB to CAN
Sensor X module instance 1 Sensor X module instance 2
Sensor X module
fusion/manager
Taskset = 1 on physical
cpu 1 on target 1
One logical or
physical interface
One of two
(2) sensor
modules
Taskset = 3 on physical
cpu 3 on target 2QoS Messaging
Other 3rd party
and ROS v2.0 can
support this

PUBLIC 31
Production Use Case Platform: Key stack software replaced with auto qualify-able stacks
3rd party ARMv8-based
Master sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
LS2/LS1 Target/other ARM-64
USB
USB to CAN
Vehicle Drive by Wire interface
PCIe
middleware (Master)
Ethernet Ethernet
3rd party ARMv8-based
Slave sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
USBPCIe
middleware (Slave)
Ethernet Ethernet
3rd party ARMv8-based
Slave sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
USBPCIe
Middleware (Slave)
Ethernet Ethernet
3rd party ARMv8-based
Slave sensor nodes
SMP Linux + Ubuntu root file system + HAL support packages
USBPCIe
Middleware (Slave)
Ethernet Ethernet
LS2/LS1 Target/other ARM-64 LS2/LS1 Target/other ARM-64 LS2/LS1 Target/other ARM-64
sensor node management across the SoC-based devices
sensors sensors sensors sensors
USB to CAN USB to CAN USB to CAN
Key: Linux replaced by an Auto Qualified O/S

PUBLIC 32
ADAS Development Kit
07.

PUBLIC 33
Fully Integrated SW/HW Platform: Research to Production
Autonomous Solutions
Comprehensive NXP Platform
Key Value Points:
Start Fusion Development Immediately
Complete Software Solutions
No Domain Limitations
Sensors Used in Fusion
Integrated Middleware and Stacks
Optimized BSP Components
Production Grade Commercial Software
Customer Focus on Fusion Integration
Leveraging Examples and Tools
One Stop Shop!
Reducin
g D
evelo
pm
en
t T
ime a
nd C
ost
Accele
rate
d R
esearc
h to
Pro
ductio
n
Customer Development Fusion
Drivers
AV Application Tools
Autonomous HAL
AV IPC Build Tools
Kernel Boot Firmware User Land
Example Fusion Applications
PUBLIC 34
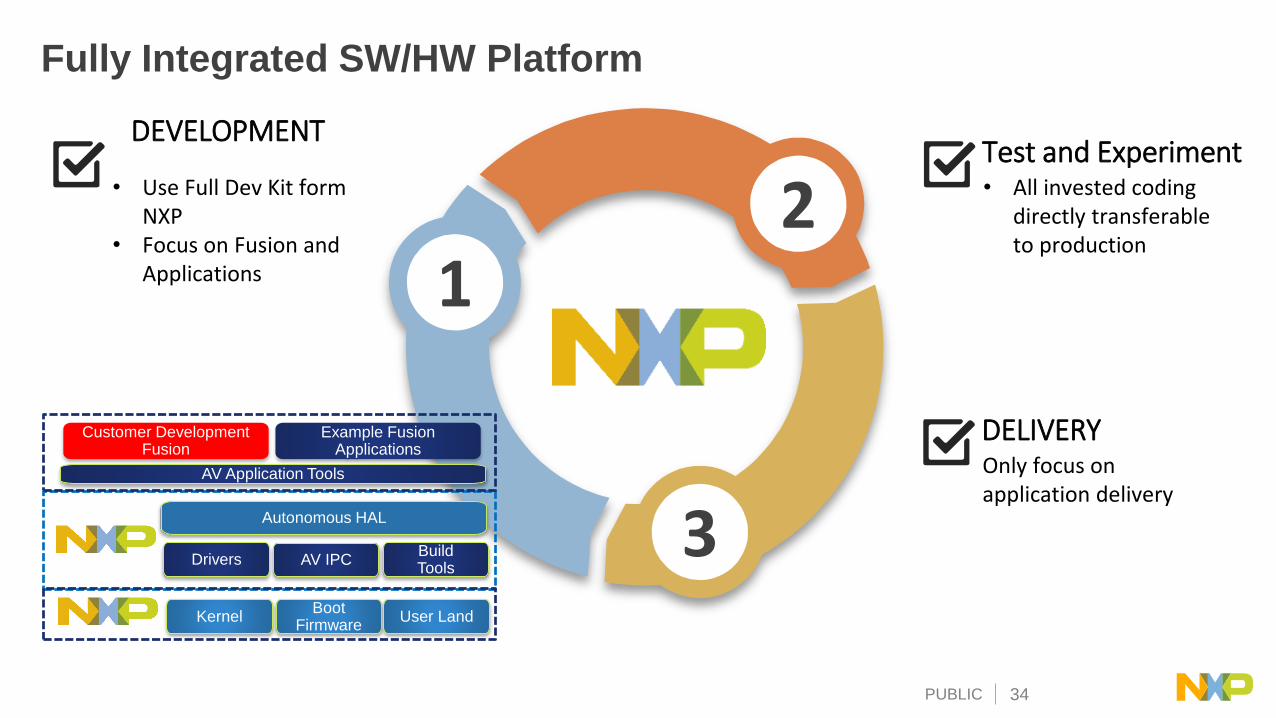
Fully Integrated SW/HW Platform
12
3
DEVELOPMENT
• Use Full Dev Kit form NXP
• Focus on Fusion and Applications
Test and Experiment • All invested coding
directly transferable to production
DELIVERYOnly focus on application delivery
Drivers
AV Application Tools
Autonomous HAL
AV IPCBuild Tools
KernelBoot
FirmwareUser Land
Customer Development Fusion
Example Fusion Applications

PUBLIC 35
Access/ Door/.. Control
NXP Autonomous Development Platform: goals
• Deliver a complete ADAS Stack on the NXP target
• Get the customer up and running in under 2 hours
• Deliver in Phases with a usable “roll-out” offering
− Provide a hardware/software platform with O/S, middleware and example code for sensor
development.
• All that is needed to get a potential sensor integrator and ADAS system going.
• Based on an actual demo running in an actual vehicle
• 3 sensors with driver-by-wire actuation interface
− RADAR, Camera and LiDAR

PUBLIC 36
F A
B
CD
E
Start Immediately with Sensor Fusion Kit
Experiment with Sensor Domains on the Bench
Move your Software to Vehicle Swap non-production SW to Production SW!
Keep ALL work including HAL
Test with Production
Platform
Deliver to Production!
Au
ton
om
ou
s Deve
lop
me
nt P
roce
ss

PUBLIC 37
For more information please contact:
Fernanda Prata
Account Manager
(408) 613 5355
Adrian Koh, PhD
(408) 821 5469
NXP and the NXP logo are trademarks of NXP B.V. All other product or service names are the property of their respective owners. © 2017 NXP B.V.

PUBLIC 39
Back-Up Slides
08.

PUBLIC 40
ADAS Sensor needs (external)

PUBLIC 41
NXP Solution for OS
Prototype or POC - OS Production OS
Purpose Reference/Prototyping/Fast
Enablement
Runs in the car
Target Disty Market, Tier1s or Research Tier 1s
Development Internal External (through partnership)
Pricing Free Commercial
Certification N/A ISO26262 Safety
Automotive SPICE
Examples Linux QNX
GHS

PUBLIC 42
72-b
it D
DR
4
Me
mo
ry
Co
ntr
oll
er
1 M
B
Pla
tfo
rm
Ca
ch
e
Performance
• ARM A72 x 8 @ 2.0 GHz
• 72K DMIPS
• SpecInt2k6 – 14, Rate -84
• Neon SIMD in all CPUs
• 2x72b (including ECC) DDR4 up to 2.1GT/s
• 33GB/s memory BW
• High Speed IO
• Multiple PCIe Gen3 controllers
• Multiple Ethernet MACs (up to 10G)
Auto quality
• AEC Q100 Grade 3 (105C Tj)
• 15 years product longevity
• ZD-like approach to reduce risk of DPPM or Life failures
• Expected Operating Life fail rate <10 FIT
• Mission Profile: 10 years, 90C Tj-effective
Security
• 20Gbps Crypto Acceleration
• MACSEC, IPsec, SSL
• Trust Architecture
• Secure Boot
• Secure Debug
• Secure Storage
• Tamper Detection
• HW Enforced Partitioning
• ARM Trust Zone
Functional Safety
• Target ASIL-B
• ECC protected memories
• Fault localization, containment and recovery
• Soft lockstep with determinism
• Excellent support for virtualization, containerization
1MB Banked L2
ARM
A72
ARM
A72
Interconnect
72-b
it D
DR
4
Me
mo
ry
Co
ntr
oll
er
SA
TA
3S
AT
A3
x8 G
en3 P
EX
x4 G
en3 P
EX
x4 G
en3 P
EX
x8 G
en3 P
EX
Queue Manager
Buffer Manager
SEC – 20G
DCE – 20G
Secure Boot
Trust Zone
Power Mgt
SD/eMMC
2x DUART
4x I2C
SPI, GPIO, JTAG
2x USB3.0 + PHY
SERDES 16 lanes @ up to 10GHz
Wire Rate IO Processor
2MB Packet Buffer
8x1/10 + 8x1 Ethernet MACs
L2 Switching
Process & Package• 28HPM, ~40W Thermal Max @ 105C
• 37.5 x 37.5 mm, lidded FCBGA, 1mm pitch, 1292 pins
1MB Banked L2
ARM
A72
ARM
A72
1MB Banked L2
ARM
A72
ARM
A72
1MB Banked L2
ARM
A72
ARM
A72
PME – 10G
Samples: Now
Telecom Production: Q3 2017
AEC-Q100 Grade 3 Qual: Q1 2018
Auto Production: Q1 2018
QorIQ Layerscape LS2084A
PUBLIC 43
Some Hardware Abstraction Layers (HALs) “middleware” and
Highly Automated Driving (HAD) Frameworks
• Robot Operating System: ROS
• PolySync run-time
• Intempora: RTmaps run-time
• Elektrobit: EB-robinos
PUBLIC 44
Access/ Door/.. Control
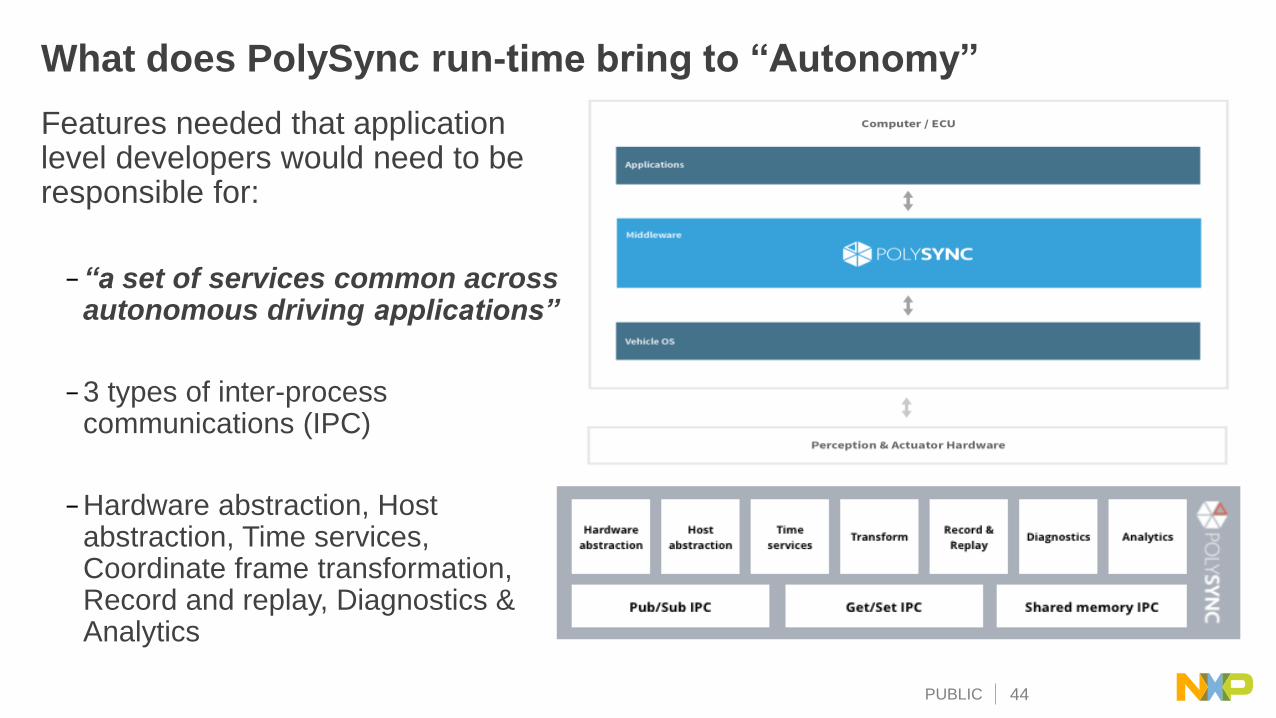
What does PolySync run-time bring to “Autonomy”
Features needed that application level developers would need to be responsible for:
− “a set of services common across autonomous driving applications”
− 3 types of inter-process communications (IPC)
− Hardware abstraction, Host abstraction, Time services, Coordinate frame transformation, Record and replay, Diagnostics & Analytics

PUBLIC 45
Access/ Door/.. Control
ROS features Vs. PolySync
• How does ROS compare to PolySync?
− does much of the same thing
IPC, recording/playback, request/response remote calls and distributive
system
Differences
− Open Source project
− BSD licensed
− alternative to a propriety middleware like PolySync and IP licensing
− large community of shared example code

PUBLIC 46
dSPACE + Intempora RTMaps
• Recording, synchronization
and playback of data from
numerous sensors and
communication buses
• Prototyping, testing and
benchmarking of perception
and data fusion algorithms
Leading producer of
engineering tools for developing
and testing mechatronic control
systems.

PUBLIC 47
Trajectory Control
Longitudinal Control
Lateral Control
Positioning
Object Fusion
Grid Fusion
Behavior
Road and Lane Fusion
Vehicle Database
Fun
ctio
n S
pe
cifi
c V
iew
s
Ve
hic
le A
bst
ract
ion
-Se
nso
rs
Ve
hic
le A
bst
ract
ion
-A
ctu
ato
rs
MotionManagement
Safety Management
Behavior
Behavior
Situative Behavior ArbitrationSensorData Fusion
HMI Management
SituationAnalysis
SituationAnalysis
SituationAnalysis
PathPlanning
PathPlanning
PathPlanning
EB robinos - DNA for automated driving
Key Features:
• architecture for ADAS up to SAE
level 5
• runs on AUTOSAR
• central ECU as well as distributed
systems
• incorporates existing or new,
customer or third party subsystems
Open robinos
• specifies a reference platform for
automated driving up to Level 5
(SAE)• architecture
• interfaces
• data flow
• control mechanisms
• software modules
• functional safety aspects
• freely available and licensed as
Creative Commons
• Available for download on
www.eb-robinos.com
EB robinos
• Lean on to the open robinos
specification
• provides software modules• for prototyping
in EB Assist ADTF
• for rapid embedding
on AUTOSAR / Linux for NXP
BlueBox
• for production
on vehicle ECU
• Prepared for functional safety
relevant systems
• EB robinos: EB‘s Autonomous Driving Software Components

PUBLIC 48
Access/ Door/.. Control
NXP Autonomous Development Platform: goals continued
• Customer will receive all components from AutonomouStuff in one package
• Evaluation support within the provided SW blocks will be provided by NXP
− Beyond demonstrator platform customization will need 3rd party involvement
• 30-60 evaluation with follow-up status
• 3rd party involvement

NXP and the NXP logo are trademarks of NXP B.V. All other product or service names are the property of their respective owners. © 2017 NXP B.V.