software control systems for smart antenna
TRANSCRIPT
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 164
SOFTWARE CONTROL SYSTEMS FOR SMART ANTENNA
Aatish Gandotra1 , Tejaswi Singh
2
1Student, Electronics and Communication Engineering, Guru Tegh Bahadur Institute of Technology, Delhi, India
2Student, Computer Science Engineering, Guru Tegh Bahadur Institute of Technology, Delhi, India
Abstract A PCB containing microcontroller provides suitable DC voltages to the phase shifters and generates the smart antenna array
beam steering. The detected WiFi signals are transferred into a mobile device through a WiFi adapter. This chapter will focus
on the software design to automatically control the complete smart antenna array system. Since two microcontrollers
PIC18F4550 and LPC1768 are used to build control PCBs. There are also two specifically designed software programs
developed in order to configure the individual PCB. For the PIC18F4550, a graphical user interface (GUI) was developed to
communicate between a laptop and the control PCB. The GUI sends commands to a Microchip compiler called MPLAB and
transfers the control C code into a Hexadecimal (Hex) document. Through the Bootloader program, this Hex code will be
copied into the microchip PIC18F4550 and then configures the digital potentiometers to generate variable output voltages. A
script using VB is made to link all of the control steps automatically.
Key Words: Software Control System, Smart Antenna, Manual Control, Switching Control, Automatic Control.
--------------------------------------------------------------------***----------------------------------------------------------------------
1. INTRODUCTION
Several improved versions of the GUI are investigated for
the LPC1768 control PCB. By utilizing the microcontroller
LPC1768, it is able to achieve the real time control, which
means there is no need for the Bootloader program again
after initialization. Due to the advantage of LPC1768, two
advanced GUIs have been implemented. Both of the GUIs
allow the user to detect service set identity (SSID) and
received signal strength indicator (RSSI) of WiFi signals
surrounding the mobile device. The basic GUI is able to
manually configure the digital potentiometers and display
the WiFi information. The control signals are transformed
from GUI to a virtual COM port, which is established by the
FT232RL, and directly go into the microcontroller. By
varying the phase shifter, the beam direction of the antenna
array could be changed in order to analyze and optimize the
signal strength of the received WiFi signals. Moreover, this
chapter provides beta version of an advanced software
package, which performs a basic smart antenna adaptive
beamforming.
There are mainly four sections in this chapter. Section 1.1
presents the software implementation introduction. GUI
designs for PIC18F4550 and LPC1768 are demonstrated in
Section 1.2 and Section 1.3, respectively. Finally, Section
1.4 summarizes this chapter.
1.1 Software Implementation for P1C18F4550
Control System
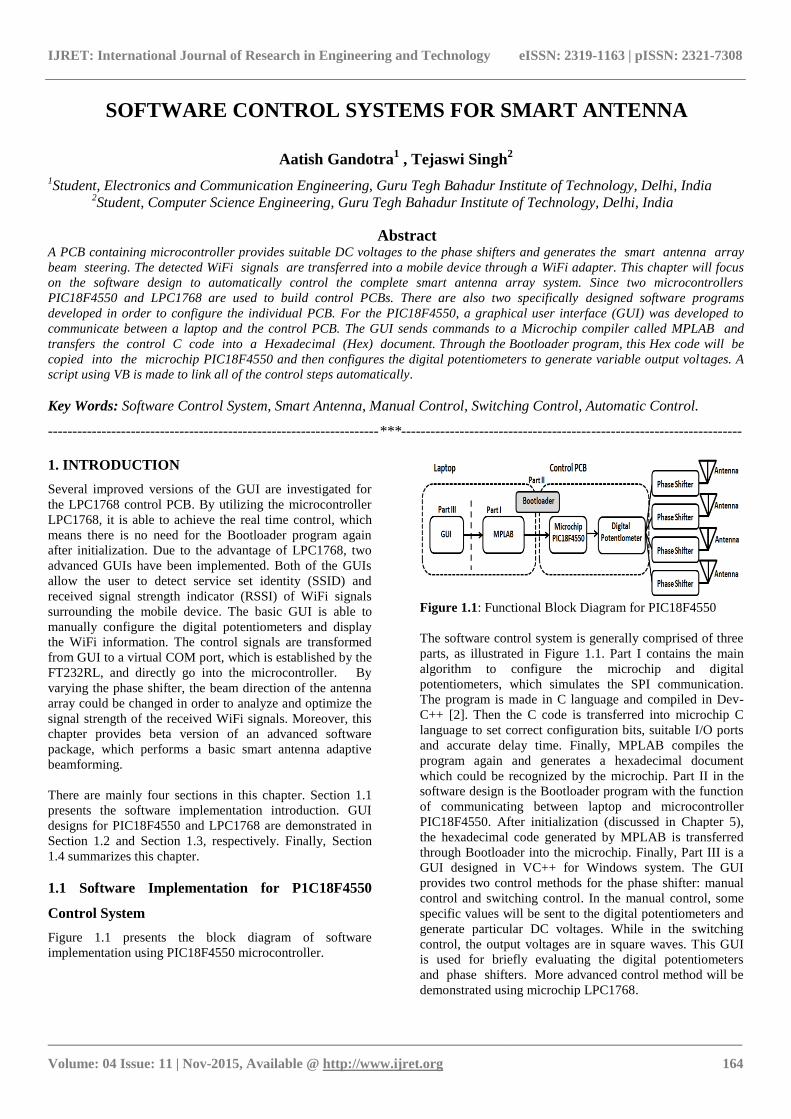
Figure 1.1 presents the block diagram of software
implementation using PIC18F4550 microcontroller.
Figure 1.1: Functional Block Diagram for PIC18F4550
The software control system is generally comprised of three
parts, as illustrated in Figure 1.1. Part I contains the main
algorithm to configure the microchip and digital
potentiometers, which simulates the SPI communication.
The program is made in C language and compiled in Dev-
C++ [2]. Then the C code is transferred into microchip C
language to set correct configuration bits, suitable I/O ports
and accurate delay time. Finally, MPLAB compiles the
program again and generates a hexadecimal document
which could be recognized by the microchip. Part II in the
software design is the Bootloader program with the function
of communicating between laptop and microcontroller
PIC18F4550. After initialization (discussed in Chapter 5),
the hexadecimal code generated by MPLAB is transferred
through Bootloader into the microchip. Finally, Part III is a
GUI designed in VC++ for Windows system. The GUI
provides two control methods for the phase shifter: manual
control and switching control. In the manual control, some
specific values will be sent to the digital potentiometers and
generate particular DC voltages. While in the switching
control, the output voltages are in square waves. This GUI
is used for briefly evaluating the digital potentiometers
and phase shifters. More advanced control method will be
demonstrated using microchip LPC1768.

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 165
1.1.1 Programed PIC18F4550
There are three programs in PIC18F4550: SPI
communication, manual control and switching control.
These C codes have been evaluated in Dev- C++. Dev-
C++ is an integrated development environment (IDE)
distributed under the GNU general public license for
programming in C and C++. It is bundled with MinGW, a
free compiler. The IDE is written in Delphi.
1.1.1.1 SPI Communication
A virtual SPI communication has been established between
microcontroller PIC18F4550 and digital potentiometer
AD5290. The algorithm is based on the potentiometer’s
timing diagram.
Figure 1.2: Digital Potentiometer AD5290 Timing Diagram
[132]
PIC18F4550 controls three signal lines for these digital
potentiometers: CLK, and SDI. Clean transitions are needed
by the positive edge sensitive CLK input to avoid clocking
incorrect data into the serial input register. When is low,
the potentiometer loads data into the serial register on each
positive clock edge and the MSB of the 8-bit serial is loaded
first. The data setup and data hold times determine the valid
timing requirements. After eight clock cycles, the 8-bit
serial input data register transfer the words to the internal
RDAC register and the line returns to logic high. Extra
MSB bits will be ignored.
There are two methods to configure the potentiometers:
manual control and switching control.
1.1.1.2. Manual Control
In manual control, it is able to control digital potentiometer
to generate specific voltage levels to the phase shifter. An
example code showing configure only one potentiometer
using C in Dev- C++ is as follows:
#include <conio.h>
void init();
void write_byte(uchar data);
int CLK, dout[8], cs_bar;
void init()
{ cs_bar=1;
CLK=0; }
{ uint i,t;
for (i=1;i>0;i--)
{ init();
write_byte(0xfb);//11111011,251
}
for(t=0;t<8;t++)
{ printf("%d",dout[t]); }
getch();
return 0; }
void write_byte(uchar data)
{ uint i;
uchar temp;
cs_bar=0;
for (i=0;i<8;i++)
{
CLK=0;
temp=data&0x80;
if (temp==0x80)
dout[i]=1;
else
dout[i]=0;
CLK=1;
}
data=data<<1; }
cs_bar=1; }
This program is exactly following the timing diagram
provided in Figure 1.2. The purpose of this code is to write
an 8-bit data into the microcontroller and then transfer the
data into a digital potentiometer bit by bit on positive clock
cycle. The delay time is ignored to simplify the program. If
a number 251 is written into the microchip PIC18F4550, its
output to the digital potentiometer should be “11111011”. A
Printf function is added into the C code, so the result of
1111011 is showing on the screen, as presented in Figure
1.3.
Figure 1.3: C Code Result for SPI Communication
From the results in Figure 1.3, the virtual SPI
communication has been successfully established between
PIC18F4550 and the digital potentiometers. The algorithm
is fully matching the timing diagram. Then, the C code is re-
written in MPLAB to configure the microchip I/O ports.
MPLAB integrated development environment (IDE) is an
integrated toolset for development of embedded applications
employing Microchip's PIC and dsPIC microcontrollers [1].

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 166
The following example demonstrates using PIC18F4550
configure only one potentiometer in MPLAB.
#include<p18f4550.h>
// Include the 18f4550 head file
#define REMAPPED_RESET_VECTOR_ADDRESS
0x1000 // Memory from 0x1000
#define cs_bar LATCbits.LATC1 // Set PIN RC1 as
#define dout LATAbits.LATA0 // Set PIN RA0 as output
data
#define CLK LATCbits.LATC2 // Set PIN RC2 as CLK
extern void _startup (void); // Set start up
#pragma code REMAPPED_RESET_VECTOR =
REMAPPED_RESET_VECTOR_ADDRESS
void _reset (void)
{ _asm goto _startup _endasm }
#pragma code // Set the suitable
configuration bits
void delay(uint x);
void init();
void write_byte(uchar data);
void delay(uint x) // Make a delay function
{ uint a,b;
for(a=x;a>0;a--)
for(b=275;b>0;b--); } // After simulation, x represent x
milliseconds
void init()
{ TRISAbits.TRISA0=0; // Set PIN RA0 as an
output, for the output data TRISCbits.TRISC1=0; // Set
PIN RC1 as an output, for TRISCbits.TRISC2=0; // Set
PIN RC2 as an output, for CLK
cs_bar=1; // Before data transfers, should be
logic high
CLK=0; } // Initialise the clock signal
void main()
{ uint i;
for (i=1;i>0;i--) // Run the main function once
init();
write_byte(0x84);//10000100,132 }//Write 132 into the
microcontroller’s memory
void write_byte(uchar data)
{ uint i;
uchar temp;
cs_bar=0; // Data starts to transfer, should be
logic low
Nop(); // Make a delay for
for (i=8;i>0;i--) // 8-bit data needs the transfer
function 8 times
{ CLK=0; // CLK goes to low to simulate a
clock signal
temp=data&0x80; // Check this bit is 0 or 1
if (temp==0x80) // If this bit is 1
dout=1; // The output data should be set as logic high
else // If this bit is 0
dout=0; // The output data should be set as logic low
Nop(); // Wait for the data processing
CLK=1; // CLK returns to high to finish a clock
cycle
Nop(); // Wait for the clock signal
data=data<<1; } // Left shift the data to write next bit into
the memory
CLK=0; // After data transfers, CLK
returns to 0
cs_bar=1; //After the function runs for
eight times,
// all of the eight bits have been
// transferred into the memory,
} // returns to high and finish the write_byte
function
Some I/O ports of PIC18F4550 are utilized as , CLK, and
SDI signals to simulate the SPI communication. In the code,
data 132 is transferred into the digital potentiometer.
In MPLAB, after compiling, the code is translated into a
hexadecimal document. Bootloader program is used to send
the “.hex” file into PIC18F4550. After resetting the control
PCB, a voltage of 15.47V is measured at the terminal W of
the digital potentiometer, which could configure the phase
shifters in the smart antenna array.
Figure 1.4: Measurement Result of PIC18F4550 Manual Control
Figure 1.4 illustrates the measurement of PIC18F4550
manual control for single digital potentiometer, which
matches the calculation. Then the algorithm is extended to
configure all of the sixteen digital potentiometers together
on the control PCB. Finally the PIC18F4550 manual
control program will work with the manual control GUI to
control the smart antenna array beam steering.
1.1.1.2. Switching Control
In switching control, the target is to generate square
waveforms from the digital potentiometers, as presented in
Figure 1.5.
Figure 1.5: Square Waveforms from Switching Control
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 167
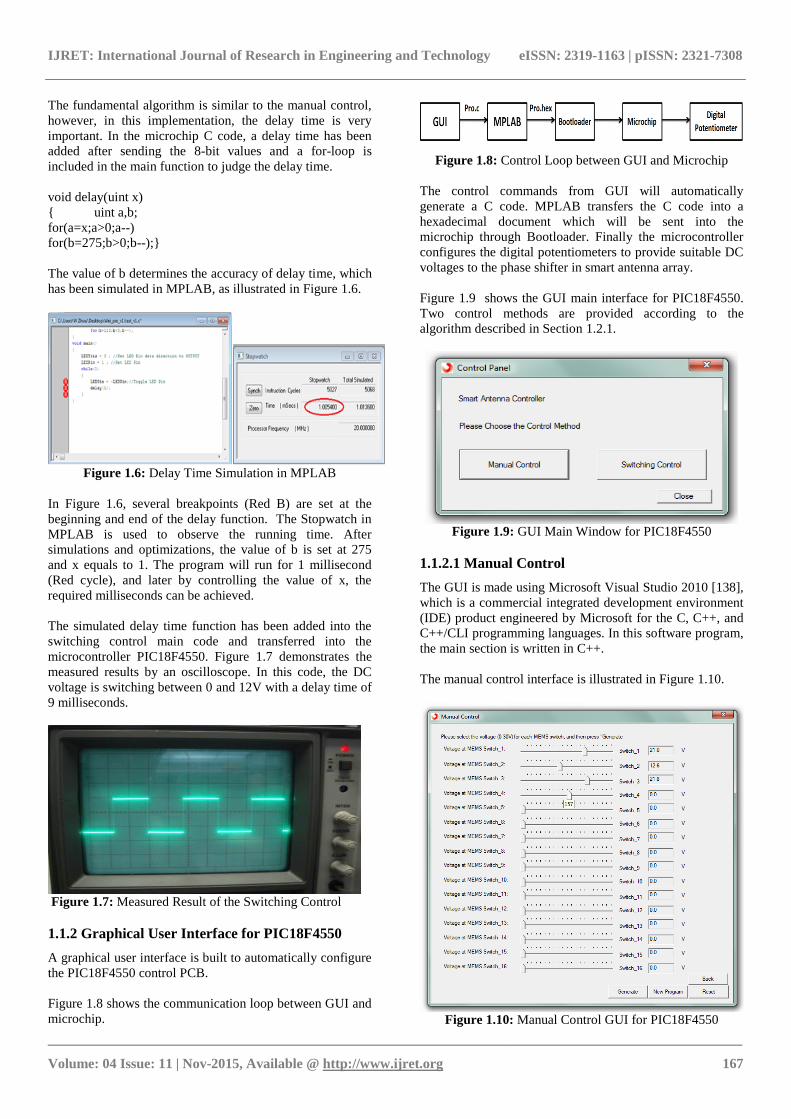
The fundamental algorithm is similar to the manual control,
however, in this implementation, the delay time is very
important. In the microchip C code, a delay time has been
added after sending the 8-bit values and a for-loop is
included in the main function to judge the delay time.
void delay(uint x)
{ uint a,b;
for(a=x;a>0;a--)
for(b=275;b>0;b--);}
The value of b determines the accuracy of delay time, which
has been simulated in MPLAB, as illustrated in Figure 1.6.
Figure 1.6: Delay Time Simulation in MPLAB
In Figure 1.6, several breakpoints (Red B) are set at the
beginning and end of the delay function. The Stopwatch in
MPLAB is used to observe the running time. After
simulations and optimizations, the value of b is set at 275
and x equals to 1. The program will run for 1 millisecond
(Red cycle), and later by controlling the value of x, the
required milliseconds can be achieved.
The simulated delay time function has been added into the
switching control main code and transferred into the
microcontroller PIC18F4550. Figure 1.7 demonstrates the
measured results by an oscilloscope. In this code, the DC
voltage is switching between 0 and 12V with a delay time of
9 milliseconds.
Figure 1.7: Measured Result of the Switching Control
1.1.2 Graphical User Interface for PIC18F4550
A graphical user interface is built to automatically configure
the PIC18F4550 control PCB.
Figure 1.8 shows the communication loop between GUI and
microchip.
Figure 1.8: Control Loop between GUI and Microchip
The control commands from GUI will automatically
generate a C code. MPLAB transfers the C code into a
hexadecimal document which will be sent into the
microchip through Bootloader. Finally the microcontroller
configures the digital potentiometers to provide suitable DC
voltages to the phase shifter in smart antenna array.
Figure 1.9 shows the GUI main interface for PIC18F4550.
Two control methods are provided according to the
algorithm described in Section 1.2.1.
Figure 1.9: GUI Main Window for PIC18F4550
1.1.2.1 Manual Control
The GUI is made using Microsoft Visual Studio 2010 [138],
which is a commercial integrated development environment
(IDE) product engineered by Microsoft for the C, C++, and
C++/CLI programming languages. In this software program,
the main section is written in C++.
The manual control interface is illustrated in Figure 1.10.
Figure 1.10: Manual Control GUI for PIC18F4550

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 168
In manual control GUI, there are sixteen sliders to control
the digital potentiometers, with the voltage level from 0V to
30V in the precision of 0.1V. The scale is above the slider
and there stands a number showing the position. By using
the scales and sliders, it is able to configure the digital
potentiometers quickly and accurately. The text boxes are on
the right demonstrating the output voltages. The required
voltage of the phase shifter is from 0V to 13V, which can be
fully covered by this implementation. After pressing the
Generate button, a script written in VB will send these
sixteen voltage values into a predefined C code. Then
MPLAB reads this C code, compiles the program and
transfers it into a hexadecimal file. Finally, Bootloader
burns the hex document into the microcontroller
PIC18F4550 and control the digital potentiometers. By
using the manual control GUI, it is able to manually
configure the phase shifters in the smart antenna array and
estimate the beam steering.
1.1.2.2 Switching Control
In switching control, the digital potentiometers will generate
square waveforms to the phase shifters and the main beam
of the smart antenna will switch just between two directions.
It is a basic evaluating method for the smart antenna array.
Figure 1.11 shows the output waveforms. The voltage levels
are different but they share an identical switching period.
The software interface is displayed in Figure 1.12.
Figure 1.11: Output Square Waveforms
Same as the manual control, for the square waveform, the
voltage range is from 0V to 30V with a precision of 0.1V.
There are scales and positions of the sliders added into the
GUI to achieve the accurate control. Furthermore, in this
switching control application, the delay time has been added
into the design to setup a switching period. Also, a script is
made to automatically link the GUI to MPLAB, Bootloader
and PIC18F4550.
Figure 1.12: Switching Control GUI for PIC18F4550
Based on research and investigation, it is noted that
PIC18F4550 is difficult to achieve the real time control,
which means the Bootloader program cannot be ignored
during the control loop. The script built in the GUI is able to
generate an automatic control but each command requires a
long data transfer period and the program is not stable. The
basic control methods (manual control and switching
control) have already made the algorithms complicated. So
the GUI of PIC18F4550 is only used to generally estimate
the digital potentiometers and the phase shifters. More
advanced software programs are developed using the
microcontroller LPC1768.
1.2 Software Implementation for LPC1768 Control
System
1.2.1 Programme LPC1768
Figure 1.13 shows the block diagram for programming
LPC1768. The microchip control code is written in C
language and compiled by an online compiler provided by
mbed, as illustrated in Figure 1.14. The compiler generates a
binary document. A DOS based program transfers the binary
file into a hexadecimal code. Flash Magic burns the .hex file
into the microcontroller LPC1768, as demonstrated in
Figure 1.15 and Figure 1.16. Flash Magic is a PC tool for
programming flash based microcontrollers from NXP
utilizing a serial protocol [3]. An ISP programmer is
communicating between laptop and control PCB.

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 169
Figure 1.13: LPC1768 Programming Block Diagram
Figure 1.14: LPC1768 Online Compiler
Figure 1.15: LPC1768 BIN to HEX Transformer
Figure 1.16: Flash Magic to Program LPC1768
Compared to PIC18F4550, the microchip LPC1768 is more
advanced. After initializing the microcontroller, as shown in
Figure 1.13, the compiler, transformer, flash magic and ISP
programmer are not required in the final communication.
When the configuration bits and algorithms have been setup
correctly, the LPC1768 will generate a virtual COM port (by
the FT232RL chip), which can be recognized by a terminal
emulator named Tera Term [140]. The GUI for LCP1768
can directly control the digital potentiometers through Tera
Term. It is able to achieve the real time control. The
communication block diagram for LPC1768 is presented in
Figure 1.17.
Figure 1.17: Real Time LPC1768 Communication Block
Diagram
Similar to PIC18F4550, the LPC1768 also controls the
digital potentiometers using virtual SPI communication, and
with the same algorithms in Section 1.2.1.
1.2.2 Graphical User Interface for LPC1768
There are also two GUI developed for LPC1768: Manual
Control and Automatic control. Both of the software
programs are able to detect service set identity (SSID) and
received signal strength indicator (RSSI) of WiFi signals
surrounding the laptop.
The GUI software can be installed on a computer with the
following minimum requirements:
• PC Compatible with Windows XP/7/Vista/ 8 – 32 or 64
bit
• At least 2 free USB Ports
Usually Windows 7 and later versions will recognize the
LPC1768 microcontroller automatically and there will be no
need to install the drivers. However, for previous Windows
version, two drivers for FT232RL microchip and the WiFi
adapter are required to be installed.
1.2.2.1 Driver Installation
The driver for LPC1768 has been written into FT232RL
microchip and the program will automatic start when the
USB port is connected to a PC running Windows. Figure
1.18 presents the steps to install the FT232RL.

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 170
(a) (b)
( c ) ( d )
( e ) ( f )
( g ) ( h )
Figure 1.18: FT232RL Diver Installation
FT232RL provides a USB serial port which can be
recognized by Windows system. The laptop communicates
to LPC1768 through FT232RL USB to UART.
The installation steps for WiFi adapter are illustrated in
Figure 1.19.
( a ) ( b )
( c ) ( d )
( e ) ( f )
( g ) ( h )
Figure 1.19: WiFi Adapter Driver Installation
After installation, the WiFi adapter will replace the laptop’s
original WiFi antenna and the smart antenna array will be
used to detect WiFi signals around the laptop. The following
sections will focus on the GUI design to configure the smart
antenna array beam steering.

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 171
1.2.2.2 Manual Control
As discussed in Section 1.3.1, the GUI sends the control
commands into Tera Term and then directly transfers to the
microprocessor LPC1768. Figure 1.20 presents the Tera
Term software which makes LPC1768 a virtual COM port
to the laptop.
( a ) ( b )
Figure 1.20: Tera Term Connection Setup
Figure 1.21: Manual Control GUI Start Screen for
LPC1768
Figure 1.21 presents the GUI start screen developed for
microprocessor LPC1768. This software program is written
in VC++ and C#. After clicking the Basic SmartWiFi
button, the main interface will appear, as displayed in Figure
1.22.
Figure 1.22: Manual Control GUI Main Screen for
LPC1768
In the upper right corner, there is a drop down menu item to
select the wireless adapter for evaluation. In the smart
antenna array system, an EDUP wireless adapter is used in
the implementation. So in the menu, “EDUP IEEE 802.11
b+g USB Adapter – Packet Scheduler Miniport” is
selected.
Figure 1.23: Wireless Adapter Selection for LPC1768
There are generally three sections in the software design. On
top is the main window showing MAC Address, SSID,
RSSI, Channel, Vendor, Privacy, Max Rate, Network Type
and Detected Time for all of the WiFi signals around a
laptop, as demonstrated in Figure 1.24.
Figure 1.24: WiFi Information of the GUI for LPC1768
On the bottom right, a window is drawing all of the real time
signal strength curves (in dBm) for the WiFi signals (as
shown in Figure 1.25(a)). Another tab in this window
illustrates the signal amplitudes in different channels.
( a ) ( b )
Figure 1.25: (a) WiFi Signal Strength Real Time Curve
(b) WiFi Signal Strength in Different Channels
On the bottom left, there exist eight real time sliders
controlling the eight Hittite analogue phase shifters on the
smart antenna board.
Figure 1.26: Real Time Control Slider for LPC1768

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 172
By changing the voltages to the phase shifters, the main
beam direction of the antenna array is rotated, which
generates a variation of the received RSSI in the manual
control GUI. Figure 1.27 shows the evaluated results.
Different voltage levels are provided to the antenna array
and the received WiFi signal strength curves are able to
reflect the diversity.
Figure 1.27: Manual Control Evaluating Results for
LPC1768
1.2.2.3 Automatic Control
An improved version of the GUI has been developed which
can provide the smart antenna array automatic control. The
main screen is illustrated in Figure 1.28.
Figure 1.28: Automatic Control GUI for LPC1768
Figure 1.29: Antenna Array and WiFi Adapter Selection
In the current smart antenna array implementation, the four-
element linear antenna array with Archimedean spiral slots
is used. In Figure 1.29, the “4 Element Linear Antenna
Array” and “EDUP 802.11 b+g USB adapter” should be
selected. This automatic GUI is also compatible with more
elements antenna arrays. By selecting the EDUP USB
adapter, the original WiFi card of the laptop will be
disabled. The smart antenna array will detect and monitor
the WiFi signals for the control laptop.
Figure 1.30: Current Connected WiFi Information
On the bottom left of the advanced GUI, the current WiFi
information is displayed, as shown in Figure 1.30.
Furthermore, in the software program, some information
windows help to describe RSSI and Link Quality, as
illustrated in Figure 1.31 and Figure 1.32, respectively.
Figure 1.31: RSSI Description
RSSI is the relative received signal strength in a wireless
environment, in arbitrary units.
Figure 1.32: Link Quality Description
Link Quality is calculated from the correlation value
obtained when code lock is achieved between the local PN
code and the incoming PN codes.
There are three functions included in the Advanced GUI for
LPC1768: Scanning, Best Signal and Choose WiFi.
1.2.2.3.1 Scanning Function
Scanning: In scanning mode, the program enables scanning
of the surrounding environmental for WiFi signals. This
takes place by steering the main beam of the smart antenna
array

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 173
Figure 1.33: Scanning Function of the GUI for LPC1768
In Figure 1.33, the scan interval and scan step can be
selected. Scan interval is the time between two sequential
scans. Scan step is the angle separation between two
sequential scans after steering the beam.
Figure 1.34: Scan Interval and Scan Step Definition
Two modes for the scanning are provided: Full scan and
Zone scan.
Figure 1.35: Scan Mode Selection
In Full Scan, this mode performs a full 360 degrees scanning
for all WiFi signals. The Scan Repeat is a parameter to
apply the rescanning for another round, up to 5 times,
default value is 1.
After clicking the Start button, the full scan will begin and a
bar shows the progress. While scanning, another window
near the “Reset” button is showing the current main beam
direction, as shown in Figure 1.36.
Figure 1.36: Status Bar and Current Main Beam Direction
When the scan finished, a popup table will show the WiFi
signals information in surrounding environment. For the
current four element linear antenna array, the main beam is
able to steer from -50º to +50º for WiFi application. The full
scan function has been modified to show only ±50º
directions.
Figure 1.37: Full Scan Results Using Four-Element Linear
Antenna Array
The table in Figure 1.37 presents the full scan results for the
four-element linear antenna array with the main beam
steering from -50º to +50º in the step of 10º. At each
direction, the table is displaying Main Beam Direction,
SSID, MAC Address, RSSI and Link Quality. It is clear that
along with the beam rotating, the RSSI and link quality are
showing different values.
In Zone Scan mode, it allows scanning a defined area or
zone by only steering the beam within this defined zone.
When the scan finishes, a popup table will show the WiFi
signals information within the selected area. The table
presented in Figure 1.38 shows the defined zone scan results
for the four-element linear antenna array with the main
beam steering from -
30º to +30º in the step of 10º.
Figure 1.38: Zone Scan Results Using Four-Element Linear
Antenna Array
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 174
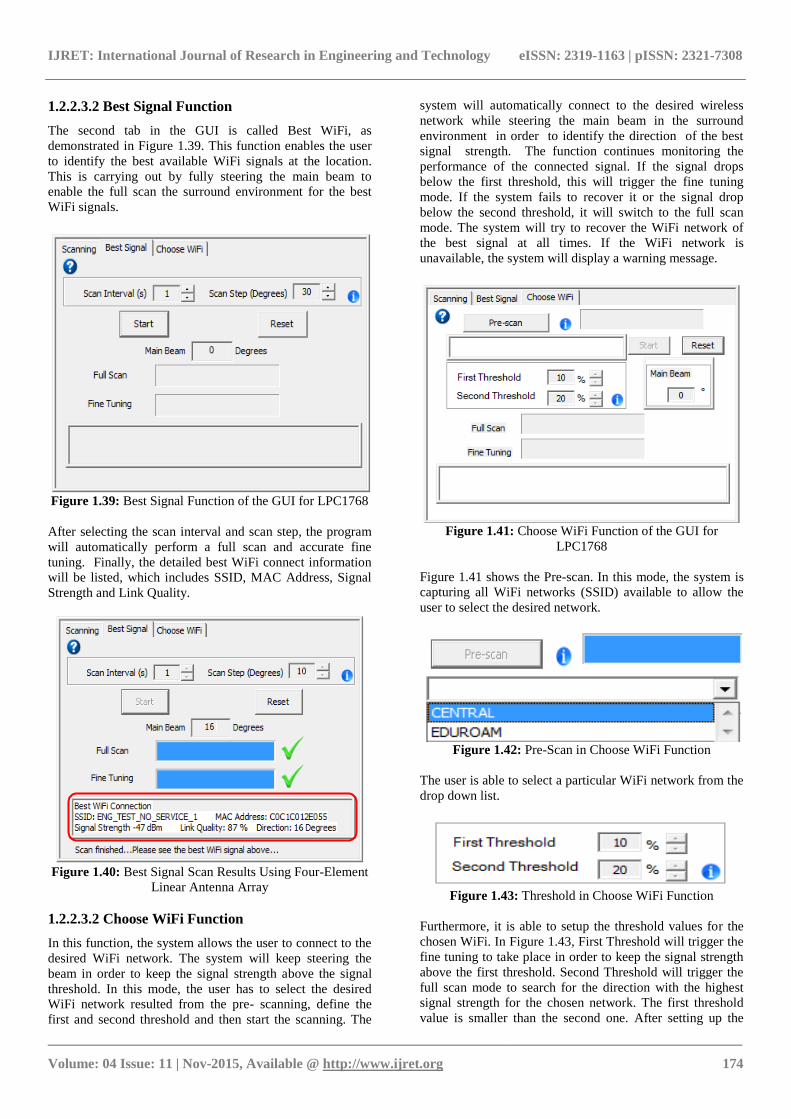
1.2.2.3.2 Best Signal Function
The second tab in the GUI is called Best WiFi, as
demonstrated in Figure 1.39. This function enables the user
to identify the best available WiFi signals at the location.
This is carrying out by fully steering the main beam to
enable the full scan the surround environment for the best
WiFi signals.
Figure 1.39: Best Signal Function of the GUI for LPC1768
After selecting the scan interval and scan step, the program
will automatically perform a full scan and accurate fine
tuning. Finally, the detailed best WiFi connect information
will be listed, which includes SSID, MAC Address, Signal
Strength and Link Quality.
Figure 1.40: Best Signal Scan Results Using Four-Element
Linear Antenna Array
1.2.2.3.2 Choose WiFi Function
In this function, the system allows the user to connect to the
desired WiFi network. The system will keep steering the
beam in order to keep the signal strength above the signal
threshold. In this mode, the user has to select the desired
WiFi network resulted from the pre- scanning, define the
first and second threshold and then start the scanning. The
system will automatically connect to the desired wireless
network while steering the main beam in the surround
environment in order to identify the direction of the best
signal strength. The function continues monitoring the
performance of the connected signal. If the signal drops below the first threshold, this will trigger the fine tuning
mode. If the system fails to recover it or the signal drop
below the second threshold, it will switch to the full scan
mode. The system will try to recover the WiFi network of
the best signal at all times. If the WiFi network is
unavailable, the system will display a warning message.
Figure 1.41: Choose WiFi Function of the GUI for
LPC1768
Figure 1.41 shows the Pre-scan. In this mode, the system is
capturing all WiFi networks (SSID) available to allow the
user to select the desired network.
Figure 1.42: Pre-Scan in Choose WiFi Function
The user is able to select a particular WiFi network from the
drop down list.
Figure 1.43: Threshold in Choose WiFi Function
Furthermore, it is able to setup the threshold values for the
chosen WiFi. In Figure 1.43, First Threshold will trigger the
fine tuning to take place in order to keep the signal strength
above the first threshold. Second Threshold will trigger the
full scan mode to search for the direction with the highest
signal strength for the chosen network. The first threshold
value is smaller than the second one. After setting up the

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 175
parameters, the software program automatically performs a
full scan and accurate fine tuning. Finally, the detailed
chosen WiFi information will be listed, which includes
SSID, MAC Address, Signal Strength and Link Quality.
The system continues monitoring the RSSI using threshold
values to maintaining the strongest WiFi signal.
Figure 1.44: Choose WiFi Scan Results Using Four-
Element Linear Antenna Array
In the above Scanning, Best WiFi and Choose WiFi
functions, all of the algorithms are able to cover the main
beam steering from 0º to 360º. However, limited by the four
elements linear antenna array characterization, only -50º to
50º beam rotating is performed. Further research will
produce a wider scanning range smart antenna array to
generate more accurate scanning results.
2. RESULTS
This paper presents the software implementation to
automatically configure the smart antenna array system.
Two series of control systems are developed for
microprocessor PIC18F4550 and LPC1768, respectively.
For microcontroller PIC18F4550, research begins with a
virtual SPI communication algorithm between the microchip
and digital potentiometers. A graphical user interface has
been proposed to control the microchip through a laptop.
After initializing PIC18F4550, the GUI transfers the control
signal into a Microchip compiler called MPLAB and
changes the C code into a Hexadecimal (Hex) document. By
utilizing the Bootloader program, this Hex code will be
delivered into the microchip PIC18F4550 and then
configures the phase shifters on the smart antenna array.
Two control methods: Manual Control and Switching
Control are provided to achieve particular DC voltage or
square waveforms from the digital potentiometers. The
PIC18F4550 software control system is able to generally
configure the smart antenna array but requires other
application to check the WiFi signal variations.
Two improved versions of the GUI are developed for
microcontroller LPC1768. This microchip provides real time
control between a laptop which makes the GUI more
advanced. Both of the GUIs allow the user to detect SSID,
RSSI, MAC Address and Link Quality of WiFi signals
surrounding the laptop. The basic GUI can manually
configure the phase shifters and display all of the WiFi
information. By changing the phase shifters, it is able to
rotate the antenna array main beam direction in order to
analyze and monitor the received WiFi signals. Furthermore,
this chapter proposes a beta version of an advanced software
package for LPC1768, which demonstrates full scanning
and basic adaptive beamforming for WiFi signals.
1. The software control system is compatible with
Windows XP/Vista/7 and 8, with stable performance.
2. The virtual SPI algorithm is able to accurately configure
the digital potentiometers.
3. The GUI for PIC18F4550 is able to generate particular
DC voltages and square waveforms for the digital
potentiometers to control the smart antenna array.
4. A VB script is developed for PIC18F4550 to
achieve an automatic control between the microcontroller
and laptop.
5. Real time control is obtained for microprocessor
LPC1768 with steady connections.
6. The GUI for LPC1768 demonstrates Manual Control and
Automatic Control. Both of the GUI illustrate detailed
received WiFi information based on the smart antenna array
system
7. The advanced GUI using LPC1768 is able to perform an
automatic antenna beam steering and select a best WiFi
signal around the control terminal.
3. CONCLUSIONS AND FUTURE WORK
Several preliminary software programs to configure the
adaptive beamforming are explored in this paper. In the
developed smart antenna, a laptop running Windows is used
as a processing device and WiFi signals (2.45GHz) are
detected and evaluated. Using a microchip PIC18F4550, the
developed graphical user interface is able to manually send
various DC voltages and square waveforms to the phase
shifters. Moreover, the software programs investigated for
the microprocessor LPC1768 can achieve both of manual
control and automatic steering. In manual control, it is able
to send particular control voltages to the phase shifters and
observe the variation of WiFi signals detected by the array.
For automatic steering, some basic algorithms are
implemented and the software program could perform a full
scan first and then select the strongest WiFi signal direction
in the environment. This work demonstrates that the fully
integrated smart antenna can be applied for future mobile
applications.
Overall, it is concluded that the required adaptive antenna
performance can be achieved using the fully integrated
smart antenna systems. Therefore, it is possible to embed the

IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 04 Issue: 11 | Nov-2015, Available @ http://www.ijret.org 176
complete smart antenna into future mobile devices in
wireless communication industry.
The future works of this research includes the transfer of
GUI into Android and IOS. This research presented several
prototype software programs to detect and analyze WiFi
signals using the proposed smart antenna in Windows.
Future work will continue to improve the control software
and also transfer the algorithms into Android and IOS
mobile operating systems.
4. REFERENCES
[1] http://www.microchip.com/.
[2] http://orwelldevcpp.blogspot.co.uk/.
[3] http://www.flashmagictool.com/.
[4] G. Wang, M. Romeo, C. Henderson, and J.
Papapolymerou, "Novel Reliable RF Capacitive MEMS
Switches With Photodefinable Metal-Oxide Dielectrics,"
Journal of Microelectromechanical Systems, vol. 16, pp.
550-555, 2007.
[5] HMC928LP5E Analog Phase Shifter, Hittite Microwave
Corporation.
[6] Y.-G. Kim, K. W. Kim, and Y.-K. Cho, "An ultra-
wideband microstrip-to-CPW transition," IEEE MTT-S
International Microwave Symposium Digest, pp. 1079-
1082, 15-20 June 2008.
[7] D. F. Filipovic, R. F. Bradley, and G. M. Rebeiz, "A
planar broadband balanced doubler using a novel balun
design," IEEE Microwave and Guided Wave Letters, vol. 4,
pp. 229-231, 1994.
[8] PIC18F4550 Data Sheet, Microchip Technology Inc,
2009. [131] LPC1768 Data Sheet, NXP Semiconductors,
2014.
[9] AD5290 Data Sheet, Analog Devices Inc. 2014.
[10] NJM2360 Data Sheet, New Japan Radio Co.Ltd. 2013.
[11] FT232R USB UART I.C. Data Sheet, Future
Technology Devices International Ltd. 2005.
BIOGRAPHIES
Aatish Gandotra, a student of Electronics
and Communication Engineering in his final
year with deep interest in telecommunication
and networking.
Publications :- 1. Replication of attacks in
wireless sensor network using NS2.
Tejaswi Singh, a student of computer
science engineering in his final year with a
knack for network security.
Publications :- 1. Replication of attacks in
wireless sensor network using NS2.