social transmission of migratory knowledge: quantifying
TRANSCRIPT

ORIGINAL PAPER
Social transmission of migratory knowledge: quantifyingthe risk of losing migratory behavior
Andrew Foss-Grant1 & Sharon Bewick1 & William F. Fagan1
Received: 11 May 2017 /Accepted: 21 December 2017 /Published online: 3 February 2018# Springer Science+Business Media B.V., part of Springer Nature 2018
AbstractWhen migration is a learned behavior, small populations have a significant problem of maintaining migratory knowledge acrossgenerations. These populations risk losing migratory behavior entirely, which may exacerbate existing stressors on populationsize. Here we investigated the success of various behavioral, demographic, and social factors towards maintaining migrationwithin small populations. Using a discrete-time probabilistic model to simulate repeated migrations, we found that migratorygroup size plays an important role in maintaining migratory knowledge within the population. Rare, large groups allow formigratory knowledge to be spread to many individuals at once. When a population learns migration information incrementally,the presence of individuals that can learn quickly, therefore transitioning rapidly into leaders, has a profound impact on migra-tional persistence. Furthermore, small populations are better able to maintain migratory behavior when groups rely on informedleaders as compared to using collective group knowledge, even when that collective knowledge is heavily weighted towardsknowledgeable individuals. Finally, we found that both species with short lifespans and species that migrate with fixed groupcompositions are at especially high risk of losing their migration behavior at small population sizes.
Keywords Migration . Social learning . Group composition . Leadership . Transmission of knowledge .Migratory loss
Introduction
Group migration occurs when individuals that share breed-ing (or non-breeding) habitats organize into smaller, sub-population level groups to complete their migratory jour-ney. This form of collective behavior presents a unique chal-lenge for persistence when the migratory behavior is partial-ly or completely learned from other individuals (Fagan et al.2012). In particular, successful navigation by a small migra-tory group hinges upon each group having at least one ex-perienced individual that is capable of navigating the migra-tory pathway. Such individual-level differences in naviga-tion ability can be achieved either through differences ininnate sensing and navigation of the environment (Pratt1954; Wiltschko and Wiltschko 2003) or differences in
learned migratory routes (Dodson 1988; Alerstam et al.2003; Couzin et al. 2005).
If individuals are innately programmed and can use envi-ronmental cues for migration without the need for learning,migratory behavior may persist independent of populationsize. However, small migratory populations may face strongAllee effects (Berdahl et al. 2016) and risk losing migratorybehavior (Fagan et al. 2012). If migratory behavior has alearned component, the persistence of migratory culture with-in a population may depend on the demography, the socialinteractions of individuals, and the mechanisms for learningmigratory pathways (Alerstam et al. 2003; Wilcove andWikelski 2008; Fagan et al. 2012). The impact of demographyand the learning process is highlighted in the case of speciesfor which individual migrational ability improves with repeat-ed migrations (Mueller et al. 2013). If migratory knowledgecan be acquired as a benefit of successful small group migra-tions, then the spread of migratory information within a pop-ulation will vary greatly. The rate of learning will also dependon grouping dynamics and the nature of decision-makingwithin a group. In the context of collective behavior, differentmodes of group decision-making include leader-following,quorum sensing, and environmental modification (Couzin
* Andrew [email protected]
1 Department of Biology, University of Maryland, CollegePark, MD 20742, USA
Theoretical Ecology (2018) 11:257–270https://doi.org/10.1007/s12080-017-0362-z

2009). Of particular interest is how these different kinds ofdecision-making behaviors may interact with processes ofgroup formation, dissolution, and reassembly (Conradt andRoper 2003) to impact migratory outcomes.
All populations face challenges when their numbers aredeclining. With migratory species that rely on learning, suchdeclines can be especially problematic because there is theadded risk of losing migratory culture. At the same time, pop-ulation declines can themselves result from loss of migratorybehavior (Bolger et al. 2008; Newmark 2008), setting up adevastating feedback cycle that exacerbates population losses.Thus, there are special challenges involved in maintaining amigratory culture that is either partially or completely learned.Nelson (1998) has explored this issue for white-tailed deer(Odocoileus virginianus), demonstrating that migratoryknowledge is not under rigid genetic control. Similarly, takingan experimental approach, Chernetsov et al. (2004) has usedwhite storks (Ciconia ciconia) to demonstrate that juvenilesisolated from adult migrants initiate their migrations in erraticdirections and suffer high levels of mortality en route.
The repeated successful transmission of knowledge re-quired for learned migration is highlighted by the Badopted-migrant hypothesis^ (McQuinn 1997), which is used in fish-eries to explain the transmission of breeding ground knowl-edge between generations for Atlantic herring (Clupeaharengus) and other fish species. According to this hypothe-sis, migration can be a fragile behavior to maintain becauseinformation about specific migratory locations is directlypassed from older generations to first-time migrants. For thisreason, much uncertainty exists regarding the stability of mi-gratory behavior within small populations of endangered spe-cies that rely on learned migratory routes, for example, thewhooping crane (Grus americana) or the southern right whale(Eubalaena australis) (Urbanek et al. 2010; Valenzuela et al.2009). From these perspectives, understanding what behavior-al and demographic conditions are favorable to the persistenceof migratory behavior can help to inform management deci-sions and better identify the biological scenarios under whichpartially or fully learned migratory behavior should beexpected.
Small group migration with a learned component can befound across a wide range of life histories. This includes short-lived species that migrate in large groups, such as Atlanticherring (Clupea harengus) (Huse et al. 2010) or greaterwhite-fronted geese (Anser albifrons) (Hayakawa andFuruhashi 2012); long-lived species that migrate in largegroups, like the Mexican free-tailed bat (Tadaridabrasiliensis) (Williams et al. 1973; McCracken and Gustin1991); and long-lived species that migrate in small groups,such as whooping cranes (Grus americana) (Mueller et al.2013), goitered gazelle (Gazella subgutturosa) (Blank et al.2012), and orcas (Orcinus orca) (Higdon et al. 2012). In con-trast, there is little evidence of short-lived species maintaining
learned, small-group migrations, but it is unclear if this is dueto biological limitations or biases in species studied.
Here we present a probabilistic model of small group mi-gration with which we explore how changes to grouping dy-namics, learning behavior, and population structure affect thepersistence of migratory cultural knowledge. We use thismodel to investigate which of these population characteristicsand grouping conditions alter the likelihood of persistenceversus loss of migratory culture. To better understand themechanisms behind these outcomes, we explore different sce-narios for transmission of migratory information within pop-ulations and identify the factors that most contribute to thepersistence of migratory knowledge. From heuristic argu-ments, we can formulate several hypotheses. First, learnedmigratory knowledge will be less likely to persist in short-lived species and those species prone tomigrate in the smallestgroups. Second, migration in small groups will not persistwithout decision-making that defers towards informedleaders. Third and last, species with partial learning states willmaintain migratory knowledge longer than species experienc-ing all-or-nothing learning due to the increased proportion ofindividuals with some capacity to successfully leadmigrations.
Methods
Model description
Herewe present a discrete-time probabilistic model describinglearned migration in a population that migrates in smallgroups. In this model, we make the reasonable assumptionthat migratory information (e.g., migratory routes, stopoversites) is learned during migration. In this context, individualsonly have the chance to learn from other, already knowledge-able individuals in their migratory group, and migratory infor-mation is equally available to all individuals in the group. Anexplanation of symbols used throughout is found in Table 1.
In our base model, at any time T, a population of N indi-viduals comprises LT individuals that have migratory knowl-edge (which we term learned individuals), and N − LT individ-uals that are naive. Eachmigratory time step of the model (oneround-trip migration) contains four stages (Fig. 1). These areas follows: Stage 1, formation of migratory groups; stage 2,determination of migratory success or failure; stage 3,updating of learning status of surviving individuals; and stage4, occurrence of births and non-migratory deaths.
We first consider two strategies for group formation (stage1). In strategy 1, the Probabilistic Strategy, individuals arerandomly assigned to equal-sized groups, which can differamong migrations. This random reassignment between migra-tions allows for horizontal transmission of migratory knowl-edge from learned individuals to naïve ones. In strategy 2, the
258 Theor Ecol (2018) 11:257–270

Fixed Association strategy, individuals are assigned to equal-sized groups, and group membership remains constant for life.This permanent assignment represents vertical transmission,where individuals learn from parents and relatives, ascontrasted with the horizontal transmission found in theProbabilistic Strategy. Later, we consider non-equal groupsizes by allowing for group sizes drawn from a probabilitydistribution (see the BGrouping dynamics^ section).
Migratory success (stage 2) is determined on a group-by-group basis and depends on the presence of a learned individ-ual. This migration is assumed as one round trip to and thenfrom non-breeding grounds for simplicity. In the base model,any group with at least one learned individual is deemed tohavemigrated successfully, whereas a group without a learnedindividual is deemed unsuccessful, resulting in the death of allgroup members. Initially, we do not consider any incrementalbenefit from having more than one learned individual. Later,however, we consider both age-structured populations, where
individuals have increasing abilities to successfully lead a mi-gratory group as they becomemore experienced (see the BAgestructure and incremental learning^ section) and group deci-sion-making, where the composition of the entire group isimportant tomigratory success (see the BSpontaneous learningand leadership^ section).
Naive individuals that complete the migration by migratingin the company of learned individuals may then transition tolearned status (stage 3) with a probability, σ. We calculate thistransition on an individual basis, where a successful migrationmay result in none, some, or all of the naive individuals in thegroup progressing to learned status. In the age-structuredmodel, this learning probability is replaced by a set of transi-tion matrices that span the range of possible learning types(see the BSpontaneous learning and leadership^ section).
Finally, our base model allows for the death of successfulmigrants (stage 4), where learned and naive individuals die ata rate δ, followed by a birth process, where any individuals
Table 1 List of variablesincluded in our model Symbol Name Description
N Population size Number of individuals in the population
LT Learned individuals Number of individuals knowledgeable of migration route at time T
σ Learningprobability
Probability a naive individual will become learned after a successfulmigration
δ Death probability Probability of death for an individual that has successfully migrated
G Group size Size of migratory groups when constant through the population
β(a,b) Beta distribution Beta distribution with shape parameter a and scale parameter b
μ Mean group size Mean size of migratory groups when variable though the population
γ Birth rate Birth rate per individual
λ Finite rate ofincrease
Average per-capita change in population over one time step
n Number ofexperience levels
The total number of experience levels present in our multi-level learningmodel, including extremes of naive and completely learned levels
i Level of experience The experience level of an individual in our multi-level learning model
l Learnedness value The probability, tied to experience level, that an individual can successfullylead a migratory group
lleader Leader learnedness The highest experience level of an individual in a given group
ω Spontaneouslearning
The probability of a group leader progressing to the next level of experience,given that the leader is not at the highest experience level
Individuals Form Migratory
Groups
Learned and naive individuals are
assigned randomly to groups
Migra�onOccurs
Groups that succeed survive, while
others are removed from the popula�on
Individuals Learn
Naive individuals that have
successfully migrated become
learned with probability σ
Deaths and Births Occur
Fig. 1 Figure describing model,showing steps of migratoryprocess
Theor Ecol (2018) 11:257–270 259

that have died during or after migration are replaced by new-born, naive individuals. In our first model formulations, thisstep, which acts outside of the migrational process, representsa precise balance between birth and death and ensures a con-stant, inter-seasonal group size. In the Fixed Association strat-egy, we do not model a mechanism for the creation of newgroups. However, we do subsequently explore the effects ofvariable birth processes where we allow population size toincrease or decrease through a separate birth step (see theBVariable birth processes^ section).
Considering the requirements of successful migration,learning, and survival, the probability of an unlearned individ-ual becoming learned and surviving in our base model is asfollows:
σ 1−δð Þ 1−N−LT−1ð Þ!N−LT−Gð Þ!
N−Gð Þ!N−1ð Þ!
� �
where σ is the probability of learning the migration, (1 − δ) isthe survival rate, and the final term represents the odds of anunlearned individual being in a group with a learned individ-ual and therefore migrating successfully. Here, G is groupsize.
Grouping dynamics
To consider variable group size, we also explore scenarios inwhich grouping can occur based on group size distributions.For each migration, group sizes are drawn from a beta distri-bution, β(a, b) with shape parameter a and scale parameter b,spanning the proportion of the population from 0 to 1.Samples of random group size are drawn from the distributionuntil the cumulative number of individuals equals the migrat-ing population. If a group is drawn whose size exceeds that ofthe total remaining population, the distribution is resampledfor the entire population. This is done instead of resamplingonly for the final group in order to greatly reduce skew to-wards small group sizes compared to other methods.Individuals are then randomly assigned as in ourProbabilistic Strategy in the base model. We initially set a =2 and b = 20.
Using this group size distribution, we explore migratorysuccess as functions of mean group size and expected lifespan.We vary the mean group size in stage 1 by adjusting b suchthat μ ¼ 1
1þbawhere μ is our distribution mean. We vary the
death probability, δ (stage 4) to vary our expected lifespan. Wemeasure the probability of maintaining migratory knowledgeover 200 migrations while varying our expected lifespan,measured in number of migrations, from 1 (death after onemigration) to 10, and varying mean group size from 1 to 10.Probability of maintaining migratory knowledge is defined asthe proportion of simulations that have one or more learnedindividuals remaining at the end of the simulation period.
To determine the effect of rare, large groups, we use ourbasemodel with fixed group sizes.Wemaintain group sizes offour individuals for all groups except one, which varies from 4to 40 individuals. In three separate simulations, we look at thislarge group occurring every one, two, or five migrations. Wesimulate this system across a variety of expected lifespans (byvarying the death probability, δ), ranging from two to fivemigrations. We then calculate the probability of migration lossor the proportion of simulations that had lost migratory knowl-edge within 200 migrations.
Variable birth processes
To test how the persistence of migratory behavior scales froma stable population to a growing population, we additionallyexplore the case where the birth and death terms are not equal,allowing for variation in population size. In this model, weintroduce a separate birth process before deaths, where γ rep-resents the birth rate per individual. This birth process occursbefore deaths in order to ensure that when γ = δ, the expecta-tion is a stable population size. For this model, we define thebirth rate per individual over the death rate as the finite rate ofincrease, λ = γ/δ. We explore the range from 0.95 ≤ λ ≤ 1.05 todetermine migration persistence as population dynamics varyfrom moderate population decline to stability to populationgrowth. In these scenarios, we use our variable group sizeprocess to formmigratory groups, as changing population sizeraises the possibility of different group sizes for eachmigration.
Age structure and incremental learning
To test our hypotheses regarding the success of incrementallearning, we create a model that allows for individuals to learnmigratory information in increasing experience levels overrepeated migrations.
We consider an age-structured model with n experiencelevels of migratory knowledge. Within this model, we consid-er multiple cases for gaining knowledge. First we considerone-step learning, where in any given migration, individualsmay only progress to the next level. In this case, the probabil-ity of learning, σ, is fixed at one, and an individual’s extent ofmigratory knowledge corresponds to its age. Alternatively, weconsider one-step stochastic learning (σ < 1). This representsdelayed learning, where individuals can successfully migrateand age but not increase in their migratory knowledge. Weexamine both of these cases for models with both two and fiveexperience levels.
For this age-structured model, each level of experience, i,has a learnedness values of l ¼ i−1
n−1 where the first experiencelevel, i = 1, corresponds to l = 0, or the complete inability tolead a successful migration, and the final level corresponds to
260 Theor Ecol (2018) 11:257–270

l = 1, a guaranteed ability to successfully lead a migration.Learnedness values are thus equally spaced within the range(0,1). Given this multi-level model, the probability of a naiveindividual successfully migrating, learning, and surviving be-comes
σ 1−δð Þ lleaderð Þwhere lleader represents the probability of successful migration,which is equal to the learnedness value of the Bleader^ of themigratory group (which we define as the individual with thehighest experience level in the group). Newborn individualsare introduced at the first experience level, i = 1.
To provide a legitimate comparison between the two- andfive-level models, we maintain the same expected lifespan andtime until full learning. This means that, in the two-level mod-el, an individual must successfully migrate four times beforemoving to the second experience level. This corresponds to afive-level model where l = 0 for the first four experience levelsand l = 1 for level 5. Alternatively, we also consider the two-level case of Bfast learners,^ where the expected time untillearning remains four migrations but is modeled stochastical-ly. Here, we allow the learning probability to maintain thesame expected time to full learning as in our five-level modelby setting σ = 0.25. This introduces variability in the learningability of individuals into the model.
We further explore our multi-level model through compar-ison of different learning capabilities. Specifically, using tran-sition matrices, we look at five types of learning. These are (a)one-step learning, (b) one-step stochastic learning, (c) stochas-tic multi-step learning, (d) jump-to-leader, and (e) jump-to-leader stochastic learning. One-step learning, as describedabove, models individuals progressing exactly one level whenthey successfully migrate in the same group as a more learnedindividual. In one-step stochastic learning, these same individ-uals fail to progress to the next level with some probability,which we set here as 0.5. Stochastic multi-step learning indi-cates that an individual will have an equal probability ofstaying in their level, i, moving to the leader’s level, j, ormoving to any level in-between with probability equal to
11þ j−i . Jump-to-leader and jump-to-leader stochastic learning
model scenarios where successfully migrating individualshave the potential to increase their learnedness to exactly thelevel of the leader of their group (respectively without or withsome probability of staying in their current state). These ma-trices are shown and described in detail in Appendix A.
Spontaneous learning and leadershipin age-structured populations
To explore the effects of learning in the absence of moreknowledgeable individuals, we introduce a parameter, ω,which controls the degree of spontaneous learning. When
ω = 0, individuals that are the most knowledgeable migrantsin their groups, or leaders, are unable to progress to the nextexperience level even after a successful migration (because noindividuals in their groups are more knowledgeable than theyare). In contrast, when ω = 1, surviving leaders can learn spon-taneously, progressing to the next experience level indepen-dent of the presence of a more knowledgeable individual. Weexplore how spontaneous learning affects the retention of mi-gratory knowledge in our five-level model by allowing theindividuals with the highest experience levels to move up alevel at a probability ofω = 0.5. This means that, if they are notalready in the highest experience level, half of the groupleaders will on average progress to the next level.
As a final complexity, we investigate the importance ofleaders, comparing leader-basedmigration (where the survivalof a group depends only on its most-knowledgeable individ-ual), with aggregate-decision migration (where each individ-ual contributes to the group’s ability to migrate successfully).For aggregate-decision migration, we calculate l, the probabil-ity of successful migration, in three ways: (1) the mean l of allindividuals in the group; (2) a weighted l, where individualcontributions scale arithmetically with experience level (1, 2,3…n); and (3) a weighted l, where individual contributionsscale quadratically with experience level (1, 4, 9…n2).
Parameter summary and comparisonagainst analytical solutions
All simulations were run using R programing language.Table 1 presents a summary of all parameters appearing inthe base model and scenarios, along with a description of theirpurpose. Results for the scenarios outlined above are, for themost part, determined through numerical simulations. Table 2gives the parameter values for each simulation. However, un-der the assumption of fixed population and fixed group sizes,we can obtain explicit mathematical formulae for the proba-bilities of migratory culture loss using combinatoric ap-proaches. These comparisons against analytical solutions ap-pear in Appendix B.
Results
In the base model with variable group sizes, long-lived popu-lations that aggregate in large groups best maintained migra-tory knowledge within small populations over many genera-tions (Fig. 2). For lifespans exceeding 4 years and group sizesexceeding three individuals, migratory culture consistentlypersisted over the simulation period of 200 migrations.Throughout our analyses, we will consider persistence for200 migrations as successfully maintaining migratory knowl-edge. In contrast, populations in which individuals wereshorter-lived or in which migration occurred in smaller groups
Theor Ecol (2018) 11:257–270 261

consistently lost migratory behavior within this same timeperiod.
The Fixed Association strategy, where individuals remainin the same migratory group for life, caused migratory persis-tence to decline rapidly compared with the ProbabilisticStrategy, where groups re-formed after each migration(Fig. 3). We view these two strategies as bounds on what
could be expected in real populations and assume that mostreal species are likely to have a group association that fallsbetween these two extremes. Rare, large groups increased theprobability of migratory persistence, even if they only occurevery five migrations (Fig. 4). The size of the rare, largegroups required to maintain migratory behavior becomesgreater as its occurrence becomes more infrequent (Fig. 4).
The finite rate of increase for the population did not greatlyaffect the probability of migration loss at small perturbationsfrom steady state (λ = 0.99, 1.01) (Fig. 5). With rapid popula-tion growth (λ = 1.05), the migratory behavior was stable over100 years. However, with rapid population decline (λ = 0.95),the probability of retaining migratory behavior steadily de-clined over time. This loss of migratory behavior in the λ =0.95 model is in the same timeframe as we would expect thepopulation to become lost through decline: a population withλ = 0.95 is expected to be under 1% of its original size after100 time steps.
Of our multi-level models, our two-level model with fastlearners showed the best retention of migratory culture, withno migratory loss over 200 migrations (Fig. 6). Of the popu-lations undergoing five-level gradual learning, those with
1 2 3 4 5 6 7 8 9
10
Expected Lifespan (Migrations)
10
9
8
7
6
5
4
3
2
1
Me
an
Gro
up
Siz
e
0 0.2 0.4 0.6 0.8 1.0
Migration loss probability
Fig. 2 The probability of migratory culture loss depends on an interactionbetween mean group size and expected lifespan. Populations with eithersmall group sizes or short-lived individuals are most at risk. Parametersfor this simulation wereN = 200; L0 = 100; σ = 0.2; l = {0, 1}; ω = 0 whileδ and γ varying with our x-axis. Mean group size is controlled by the betadistribution, where the first shape parameter, a, is 2 and the second shapeparameter, b, is changed according to μ ¼ 1
1þba
Table 2 List of simulation parameter values. N/A indicates a parameterthat is not applicable to a given simulation. Parameters varying within asubset are given by brackets, while ranges are indicated by a dash. Group
sizes for Fig. 2 are determined by a beta distribution with a different shapeparameter, b, for each mean group size
Description N0 L0 σ δ G γ Experience levels l ω
Fig. 2 Group size vs. expected lifespan 200 100 0.2 0.1–1 beta(2,var.) 1–10 2 {0,1} 0
Fig. 3 Fixed vs. random group association 12 3 0.2 0.1 4 N/A 2 {0,1} 0
Fig. 4 Effect of rare, large groups 200 100 0.1 0.2–0.5 4+ N/A 2 {0,1} 0
Fig. 5 Effect of the finite rate of increase 200 100 0.1 0.5 beta(2,20) 0.95–1.05 2 {0,1} 0
Fig. 6 Age structure and spont. learning 200 N/A 0.25–1 0.1–0.9 beta(2,50) 1 2–5 0–1 0–0.5
Fig. 7 Comparison of learning mechanisms 100 N/A 0.5 0.1–0.9 beta(2,80) 1 5 0–1 0
Fig. 8 Leadership and decision-making 250 N/A 1 0.1–0.9 beta(2,20) 1 5 0–1 0
Fig. 3 Strategies for group formation (fixed association versus randomassociation) differ greatly in their predicted influences on the probabilityof culture loss across successivemigrations. Plotted are results for σ = 0.2,δ = 0.1, with N = 12 individuals in three groups of four individuals.Initially, there were three learned individuals (L0 = 3) with one learnedindividual in each group. Other parameters used in this simulation arel = {0, 1}; ω = 0.
262 Theor Ecol (2018) 11:257–270

Spontaneous Learning (i.e., individuals could progress to thenext experience level after a successful migration without thepresence of a more learned individual) were the most success-ful at maintaining migratory culture, but less so than the two-level model with fast learners. Furthermore, we found thatthose learning processes that allowed for non-zero probabili-ties of skipping experience levels (i.e., the stochastic multi-step, jump-to-leader stochastic learning, and jump-to-leadermodels of learning) all maintained migratory culture moresuccessfully than those that only allowed incremental progres-sion (Fig. 7).
Leader-based migration, where migratory success was de-termined by the knowledge status of the most experiencedindividual in a migratory group, greatly outperformed the oth-er decision-making mechanisms (i.e., averaged decision-
making, arithmetic weights and quadratic weights; Fig. 8).Arithmetic and quadratic weights offered only modest im-provements in the persistence of migration compared to aver-aged decision-making.
Discussion
The persistence or loss of migratory behavior in species withgroup migration and social learning is not solely determinedby population-specific factors, grouping dynamics, or learningprocesses. Rather, the summation of all three of these factorscan contribute to migratory loss. We will address each of thesecauses in turn to better understand their importance in main-taining migration in small populations.
2
2.5 3
3.5 4
4.5 5
Expected Lifespan (Migrations)
40
36
32
28
24
20
16
12
8
4
La
rg
est
Gro
up
Siz
e
Large Group Every Year
2
2.5 3
3.5 4
4.5 5
Expected Lifespan (Migrations)
40
36
32
28
24
20
16
12
8
4
Larg
est
Gro
up
Siz
e
Large Group in Alternating Years
2
2.5 3
3.5 4
4.5 5
Expected Lifespan (Migrations)
40
36
32
28
24
20
16
12
8
4
La
rg
est
Gro
up
Siz
e
Large Group Every 5 Years
0 0.2 0.4 0.6 0.8 1.0
Migration loss probability
Fig. 4 Migratory persistence as afunction of variation in lifespan(x-axes) and the largest group inthe population (y-axes). Onegroup in each population is fixedat this largest size, and all othergroups are of size 4. These largestgroups occur every year (panel 1),every other year (panel 2), andevery 5 years (panel 3).Parameters for this simulationwere N = 200; L0 = 100; σ = 0.1;l = {0, 1}; ω = 0 while δ variesalong the x-axis
Theor Ecol (2018) 11:257–270 263

The size of migratory groups affects how well informationcan be spread within a population. Similarly, average lifespandetermines the number of migrations an individual will per-form. Consequently, both group size and species lifespan arekey variables determining how well a small population willmaintain migratory behavior. We found that populations withthe most persistent migratory behavior were those with longlifespans and relatively large group sizes (Fig. 2). In popula-tions with a longer average lifespan, the average learned indi-vidual is able to share knowledge with naive individuals overrepeated migrations. Likewise, in populations with larger
migratory groups, a single learned individual can, on average,spread migratory knowledge to more individuals per migra-tion. Conversely, ourmodel predicts lowmigratory success forpopulations inwhich individuals are short-lived andmigrate insmall groups. We believe that this corresponds with the dearthof examples of animals that fall into this category, as short-lived species would likely require very large population sizesto maintain learned migration due to low individual transmis-sion rates. This fits with the expectation that species with asocially learned migratory behavior are likely to be long-lived with highly social behavior (Bauer et al. 2011). Speciesexhibiting partially or completely learned migration tend to belong-lived (Higdon et al. 2012; Blank et al. 2012), have largegroup sizes (Huse et al. 2010; Hayakawa and Furuhashi 2012),or both (Nelson 1998; Chernetsov et al. 2004).
Migratory success also varies based on the importance ofleaders and the role of knowledgeable individuals during themigratory process. As expected, we found leader-based
0 50 100 150 200
0.0
0.2
0.4
0.6
0.8
1.0
Number of Migrations
Probability o
f M
igra
tory K
now
ledge L
oss
2−level delayed learning
5−level learning
5−level with spontaneous learning
2−level learning with quick learners
Fig. 6 The loss of migratory culture as a function of age-structuredlearning. Learning models are defined in the Methods subsection “Agestructure and incremental learning.”Here,N = 200 with equal numbers ofindividuals initially in each experience level. δ ∈ {0.1, 0.3, 0.5, 0.7, 0.9}for sequential experience levels in all cases except for 2-level learningwith quick learners, where δ ∈ {0.1, 0.9}. σ = 1 for all learning modelsexcept for two-level learning with quick learners, where σ = 0.25,meaning that all models have an expected time until completeknowledge of four migrations. Ability to successfully lead a migratorygroup ranged from complete (l = 1) at the highest experience level toabsent (l = 0) at the lowest experience level, with intermediate levelsbeing distributed evenly in that range. ω = 0.5 for the five-level withspontaneous learning simulation, while ω = 0 for all others. γ = 1 for allsimulations
Fig. 5 How the finite rate of increase (λ) influences the loss of migratoryculture when migration occurs in groups. This figure presents results froma two-level learning model where a naive individual can progress to thelearned state with probability σ = 0.1 after successfully completing amigration. Individuals die with δ = 0.5, and initial populations consist ofN0 = 200 with L0 = 100. Further parameters for this simulation werel = {0, 1}; ω = 0.
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
Number of Migrations
Pro
ba
bility o
f M
igra
tory K
now
led
ge
Lo
ss
average decision
arithmetic weights
quadratic weights
leader−based decision
Fig. 8 Effects of different kinds of decision-making on the loss ofmigratory knowledge. Leader-based decision-making holds a clearadvantage against other kinds of group decision-making, where allindividuals in the migratory group contribute regardless of theirexperience levels. This comparison uses the five-level model. Here,N = 250 with equal numbers of individuals initially in each experiencelevel. δ ∈ {0.1, 0.3, 0.5, 0.7, 0.9}, σ = 1, and γ = 1.
0 20 40 60 80
0.0
0.2
0.4
0.6
0.8
1.0
Number of Migrations
Pro
ba
bility o
f M
igra
tory K
now
led
ge
Lo
ss
1−step stochastic learning
1−step learning
Stochastic multi−step
Jump−to−leader stochastic learning
Jump−to−leader
Fig. 7 How different learning mechanisms affect the loss of migratoryculture. All results are for a population size of N = 100 individuals and alearning model with five experience levels each initially containing 20individuals. Learning probabilities are described in the BAge Structureand Incremental Learning^ and Appendix A. δ ∈ {0.1, 0.3, 0.5, 0.7, 0.9}and γ = 1.
264 Theor Ecol (2018) 11:257–270

migratory behavior to produce the highest persistence of mi-gratory knowledge (Fig. 7), as this behavior relies on the bestinformation present in eachmigratory group. Interestingly, notonly did average decision-making perform poorly, but weight-ed decision-making also produced rapid decline of migratoryculture, even when quadratically weighted, which made moreexperienced individuals disproportionately important. In somespecies, for example, whooping cranes (Mueller et al. 2013),migratory efficiency is closely linked to the presence of older,more experienced individuals, and is relatively insensitive tothe composition of the rest of the group, including variation ingroup size. In some fish, the level of experience in an envi-ronment, independent of age, determines individuals to befollowed (Reebs 2000). However, quorum sensing, or collec-tive behavior that follows the preference of the majority, sug-gests an alternative to leader-based movement that can im-prove movement accuracy (Ward et al. 2008). As quorumsensing necessitates large group sizes for accurate consen-sus-making, smaller groups would therefore be unusually re-liant on leader-based decision-making in comparison. Indeed,with even a moderately higher cost for leading than following,models have suggested that small groups will rely on fewindividuals to lead, a proportion that decreases with group size(Guttal and Couzin 2011). Conversely, the notion that largergroups necessitate a higher number of individuals capable ofleading would make a single-leader strategy less viable atlarge group sizes.
The manner in which migratory groups are formed in asmall population can greatly restrict or permit the transfer ofmigratory information within the population. We found thatfixed group association, similar to vertical transmission ofknowledge, severely underperformed random association interms of migratory persistence (Fig. 3). The gap in successbetween these two strategies only widens as the number ofgroups increases (not shown), as this increases the potentialbenefit of group mixing. This is not surprising, because deter-ministic group associations can be thought of as a metapopu-lation model with no connectivity. That is, once a migratorygroup loses its last learned individual, the group is unable tobe rescued by any other group. By contrast, random associa-tion provides mixing similar to increased connectivity inmetapopulations. Although true group formation is likely tolie somewhere between fixed group associations and fullyrandom associations, these two scenarios set limiting boundson the rate of migratory culture loss. Social aggregations canbe determined by relatedness for some species (Richard et al.1996), whereas others form independently of kinship (Muelleret al. 2013). In bottlenose dolphins, these strategies are bothpresent, causing some social groupings to be fixed and othersmore liable to change (Krützen et al. 2003). Furthermore,fixed group associations may only exist in one life stage, suchas mother humpback whales migrating with their calves,where further migratory groups are unrelated (Valsecchi
et al. 2002). Despite the lower performance of fixed groupstrategies at low population levels (Fig. 3), these strategiescan be found in real species with larger populations, whereother benefits, such as kin altruism, may make the strategyfavorable.
Furthermore, we found that the relative sizes of the migra-tory groups within a population greatly influenced whetherthat population remained migratory (Fig. 4). Given constantpopulation size, persistence of migratory behavior increases asthe largest group size increases. From a learning perspective,mass migration, or having the entire population migrate in onegroup, would permit the greatest spread of information, as oneindividual could teach the entire population under our as-sumed dynamics. Indeed, we can see the importance of rare,large groups in Fig. 4, as few simulations of groups of fourindividuals maintained migratory behavior over 200 migra-tions. In contrast, having a slightly larger group every migra-tion or a rare, large group increased the probability of migra-tory persistence for many lifespans. This might be of particu-lar importance in species such as herring, where individualsexhibit partially learned migration in large groups varyingfrom hundreds to millions of individuals (Misund 1993;Huse et al. 2010). As it is theorized that these herring requirea certain percentage of learned individuals to successfully tar-get their destination (Huse et al. 2002), smaller groups sizesmight be prohibited by a low ability to learn or other factors(such as information exchange) that would slow the spread ofmigratory knowledge.
The mechanisms by which individuals learn are empirical-ly harder to measure than group size or longevity, but suchmechanisms nevertheless greatly influence the persistence ofmigratory culture. Some species, including some fish (Kiefferand Colgan 1992) and whooping cranes (Mueller et al. 2013),have incremental learning whereas others, such as goldenshiners (Reebs 2000), ravens (Foley et al. 2008), and ele-phants (Wright et al. 2003) have defined leaders andBfollowers^ (King and Cowlishaw 2009). We found that apopulation with five levels in which learning occurred incre-mentally was able to maintain its migratory culture far longerthan a population with leaders that learn all at once (stepwise)after four migrations (two-level delayed learning) (Fig. 6). Incontrast, when we leveled the playing field so that groups hadequal expected times until complete learning, a leader andfollower behavior with variation in how quickly individualslearn (two-level learning with quick learners) more success-fully maintained migration in a small population as comparedto incremental learning. To expand on this, even though apopulation with two-level learningmay havemore completelynaive individuals than a population of equivalent size in whichlearning occurs gradually over five experience levels, the pos-sibility that a small number of individuals can becomecompletely informed after the first or second migration canprevent the loss of migratory culture. In contrast, populations
Theor Ecol (2018) 11:257–270 265

experiencing two-level delayed learning have neither a bufferof partially learned individuals nor quick learners, making thisstrategy much less successful.
Spontaneous learning was another learning behaviorthat provided a mechanism for the persistence of migra-tory behavior. In our five-level model of incrementallearners, allowing for spontaneous learning (where suc-cessfully migrating individuals could progress to thenext experience level without having joined a groupwith a more knowledgeable individual) provided a sub-stantial buffer against the loss of migratory culture (Fig.6). To conceptualize spontaneous learning, we can thinkof a populations where groups are migrating with someelement of randomness. Of those moving randomly, in-dividuals in groups that succeed retain the ability tocomplete this journey in future migrations, in effectcausing them to learn without being taught by otherindividuals in the group. In our model, adding sponta-neous learning allowed a parameterization that had pre-viously seen complete loss of migratory behavior within100 migrations to improve to roughly a 50% chance ofpersisting through 200 migrations (Fig. 6). In a migrat-ing population, this would represent the difference be-tween less-informed migratory groups failing to becomebetter leaders and the more successful strategy of thesegroups learning by trail-and-error.
In general, the ability to skip experience levels (wheth-er by the stochastic multi-step mechanism or the jump-to-leader mechanism) proved far more successful than incre-mental learning as a means of maintaining migratory be-havior. Indeed, allowing individuals to skip experiencelevels had a far greater effect than removing the possibil-ity of not learning (Fig. 7). Again, this implies that quicklearners provide great benefit in small migratory popula-tions. This is contrary to the observed concept of rein-forcement learning, where satisfactory outcomes reinforcebehaviors over time (Sutton et al. 1992). However, rein-forcement learning is computationally simple (Suttonet al. 1992), and slower learning may provide a mecha-nism to deal with variable quality of migratory knowl-edge. Given limited capacity for memory, the ability toreinforce and maintain the most current information al-lows individuals to update route information as environ-mental conditions change (Fagan et al. 2013). It is worthnoting that, given time and stability, a population under-going the Bjump-to-leader^ behavior will eventually loseintermediate experience levels and become a two-levelstructured population, independent of the probability ofjumping. Therefore, this population would seem to onlypersist with a multiple-level learning behavior in changingenvironmental conditions, where the information beingpassed among individuals has some varied utility, suchas changing migratory routes.
Conclusions
Our results highlight the importance of experienced indi-viduals to migration persistence. In some cases, experi-ence will vary directly with age, whereas in other cases,experience derives from particularly fortuitous social in-teractions. In either case, these models emphasize that asmall number of individuals with particular trait values(here, experience level) can have outsized conservationrelevance. These results are intriguing because they paral-lel findings from other systems of conservation interest.For example, a few robust, mature males may contributedifferentially to the reproductive health of wildlife popu-lations, but these same males are desired as hunting tro-phies (Coltman et al. 2003). Likewise, in marine fisheries,a few females of extraordinary size may have massivelydisproportional impacts on recruitment rates on when re-productive potential scales nonlinearly with size (Trippel1995; Baskett et al. 2005).
One limitation of our model is that we generally assumethat uniformed migrants die because they fail to migrate suc-cessfully to the correct destination. While migratory pathwaysfor obligate species may remain consistent over long periodsof time, straying (i.e., deviating from an established migratoryroute) is certainly not an exclusively fatal behavior. Indeed,within the framework of the Badopted-migrant hypothesis^(McQuinn 1997), novel breeding grounds may arise in yearsof high reproductive output where many naive individualsmigrate without learned individuals but nonetheless arrive insuitable habitats (Huse et al. 2002; Huse et al. 2010).However, in the context of our model, reducing the penaltiesfor uninformed movement should not qualitatively alter ourconclusions. Overall, our findings suggest that rare, large mi-gratory groups and regular mixing between groups are key tothe persistence of learned migratory behavior in small popu-lations. The opportunity for Bquick learners,^ even if rare, canprovide a vital mechanism for sustaining migratory behaviorin small populations. Species with short lifespans appear to beat particular risk of migratory loss when faced with decliningnumbers.
Funding information The US government supported this research viaNational Science Foundation grant ABI-1458748 (WF) and aDepartment of Education GAANN Fellowship (AFG).
Appendix A – Derivation of transitionmatrices for different learning mechanisms
Below are the transition matrices that describe the differentlearning mechanisms described in our multi-level model.These examples use a four-level model but can be generalizedfor any number of levels. Rows represent the current andpotential experience levels of the individual, columns
266 Theor Ecol (2018) 11:257–270
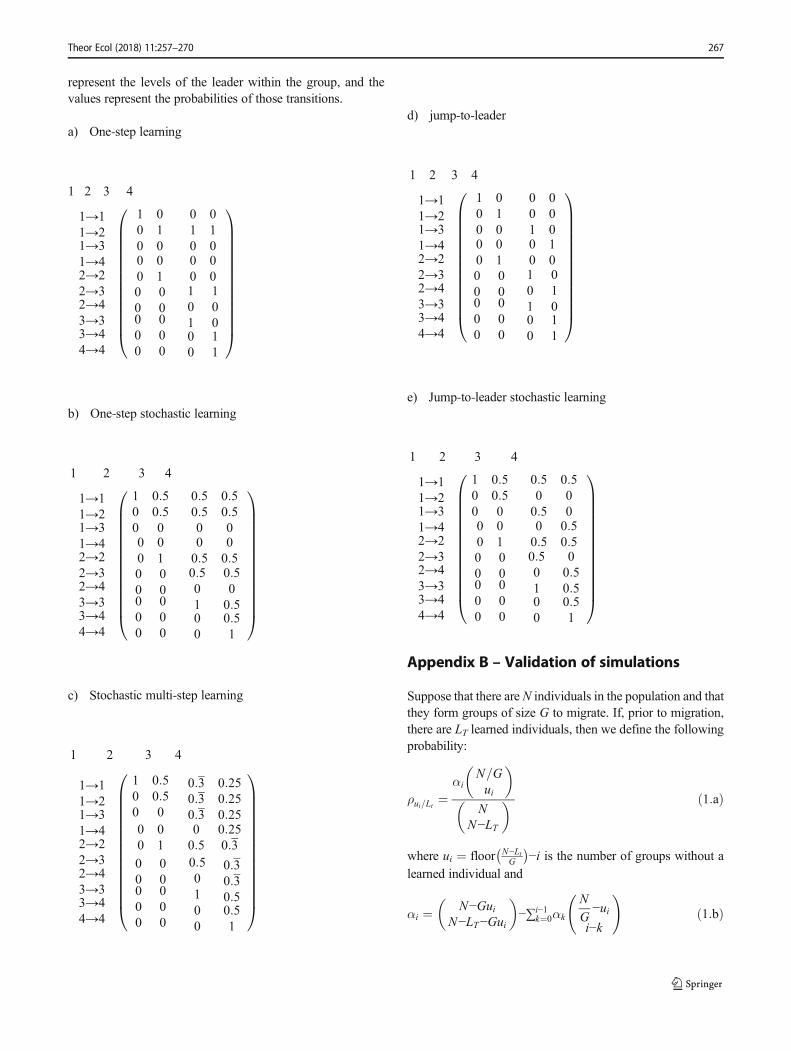
represent the levels of the leader within the group, and thevalues represent the probabilities of those transitions.
a) One-step learning
1 2 3 4
1→11→21→31→42→22→32→43→33→44→4
1 00 10 0
0 01 10 0
0 00 1
0 00 0
0 00 0000
000
101
100
0 10 1
0BBBBBBBBBBBBB@
1CCCCCCCCCCCCCA
b) One-step stochastic learning
1 2 3 4
1→11→21→31→42→22→32→43→33→44→4
1 0:50 0:50 0
0:5 0:50:5 0:50 0
0 00 1
0 00:5 0:5
0 00 0000
000
0:501
0:500:5
0 0:50 1
0BBBBBBBBBBBBB@
1CCCCCCCCCCCCCA
c) Stochastic multi-step learning
1 2 3 4
1→11→21→31→42→22→32→43→33→44→4
1 0:50 0:50 0
0:3 0:250:3 0:250:3 0:25
0 00 1
0 0:250:5 0:3
0 00 0000
000
0:501
0:30:30:5
0 0:50 1
0BBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCA
d) jump-to-leader
1 2 3 4
1→11→21→31→42→22→32→43→33→44→4
1 00 10 0
0 00 01 0
0 00 1
0 10 0
0 00 0000
000
101
010
0 10 1
0BBBBBBBBBBBBB@
1CCCCCCCCCCCCCA
e) Jump-to-leader stochastic learning
1 2 3 4
1→11→21→31→42→22→32→43→33→44→4
1 0:50 0:50 0
0:5 0:50 00:5 0
0 00 1
0 0:50:5 0:5
0 00 0000
000
0:501
00:50:5
0 0:50 1
0BBBBBBBBBBBBB@
1CCCCCCCCCCCCCA
Appendix B – Validation of simulations
Suppose that there are N individuals in the population and thatthey form groups of size G to migrate. If, prior to migration,there are LT learned individuals, then we define the followingprobability:
ρui=Lt ¼αi
N=Gui
� �N
N−LT
� � ð1:aÞ
where ui ¼ floor N−LtG
� �−i is the number of groups without a
learned individual and
αi ¼ N−GuiN−LT−Gui
� �−∑i−1
k¼0αk
NG−ui
i−k
!ð1:bÞ
Theor Ecol (2018) 11:257–270 267

In (1.a, 1.b), ρui=Lt is the probability that there will be uigroups without a learned individual, given that there were atotal of Lt learned individuals in the population. If there are uigroups without a learned individual, then Ui =Gui individualsdid not have an opportunity to learn and
Si ¼ N−Ui−Lt ¼ N−G floorN−LTG
� �−i
� �−LT ð2Þ
individuals were newly exposed to the route. Consequently,ρui=Lt ¼ ΩSi=Lt where ΩSi=Lt is the probability of having Sinewly exposed individuals, given that there were Lt learnedindividuals prior to migration. However, not all exposed
individuals will learn the route. If the probability of learningis σ, then we define the following probability
pA=Si ¼SiA
� �σA 1−σð ÞSi−A ð3Þ
where pA=Si is the probability of having A newly learned indi-
viduals given that Si individuals were exposed. From (1.a, 1.b,2 and 3), we define the probability of having Lt + 1 learned
Fig. 9 Probability of culture loss for three different population sizes andassuming random grouping. Red lines are simulations (average of 5000trials); black lines are exact results (color figure online)
Fig. 10 Probability of culture loss for four different group sizes andassuming random grouping. Red lines are simulations (average of 5000trials); black lines are exact results (color figure online)
Fig. 11 Probability of culture loss for four different learning probabilitiesand assuming random groupings. Red lines are simulations (average of5000 trials); black lines are exact results (color figure online)
Fig. 12 Probability of culture loss for random vs. fixed associationgroupings. Red lines are simulations (average of 5000 trials); blacklines are exact results. One would expect that associations between fullyrandom and fully fixed would lie between these two curves (color figureonline)
268 Theor Ecol (2018) 11:257–270

individuals after migration, given that there were Lt learnedindividuals before migration as
PLTþ1=LT ¼ ∑floor
N−LTGð Þ
i¼0 pLTþ1−LT=SiΩSi=LT ð4Þ
PLTþ1=LT ¼ ∑floor
N−LTGð Þ
i¼0N−G floor
N−LTG
� �−i
� �−Lt
LTþ1−LT
0@
1A
σLTþ1−LT 1−σð ÞN−G floorN−LTGð Þ−ið Þ−LTþ1
αi
N=G
floorN−LTG
� �−i
0@
1A
NN−LT
� �ð5Þ
This defines the transition matrix for the migration step.Suppose that death happens after migration. If the proba-
bility of dying after migration is δ and keeping the total pop-ulation fixed, the probability that there are Lt + 2 learned indi-viduals after death given that there were Lt + 1 learned individ-uals prior to death is
dLTþ2=LTþ1¼ LTþ1
LTþ1−LTþ2
� �δLTþ1−LTþ2 1−δð ÞLTþ2 ð6Þ
This defines the transition matrix for the death step.The probability of having a specific number of learned
individuals after T time steps is then given by
CT ¼ dPð ÞTC0 ð7Þwhere C0 is a vector defining the probability of having a cer-tain number of learned individuals at the initial time and CT isa vector defining the probability of having a certain number oflearned individuals at time t = T.
The previous derivation assumed that groups formedcompletely at random. At the other extreme, there may beperfect affinity to a single group (i.e., individuals are born intoa group and remain with the group until death). To model thisscenario, we can use the previous derivation, modified slight-ly. For N individuals that form groups of size G, we cancalculate the probability of having a certain number of learnedindividuals, assuming perfect affinity to a group, as
CT ¼ CT ;N=G
� �N=G ð8Þ
where CT,N/G is CT calculated for a population of size N/Gassuming evenly distributed learned individuals, i.e., L0/Glearned individuals per group.
Next we present results:
References
Alerstam T, Hedenström A, Åkesson S (2003) Long-distance migration:evolution and determinants. Oikos 103(2):247–260. https://doi.org/10.1034/j.1600-0706.2003.12559.x
Baskett ML, Levin SA, Gaines SD, Dushoff J (2005) Marine reservedesign and the evolution of size at maturation in harvested fish.Ecol Appl 15(3):882–901. https://doi.org/10.1890/04-0723
Bauer S, Nolet BA, Giske J, Chapman JW, Åkesson S, Hedenström Aand Fryxell JM (2011) Cues and decision rules in animal migration.Animal migration: a synthesis. Oxford University Press, Oxford, pp68–87
Berdahl A, van Leeuwen A, Levin SA, Torney CJ (2016) Collectivebehavior as a driver of critical transitions in migratory populations.Mov Ecol 4(1):18. https://doi.org/10.1186/s40462-016-0083-8
Blank D, Yang W, Xia C, Xu W (2012) Grouping pattern of the goiteredgazelle, Gazella subgutturosa (Cetartiodactyla: Bovidae) inKazakhstan. Mammalia 76(2):149–155
Bolger DT, Newmark WD, Morrison TA, Doak DF (2008) The need forintegrative approaches to understand and conserve migratory ungu-lates. Ecol Lett 11(1):63–77. https://doi.org/10.1111/j.1461-0248.2007.01109.x
Chernetsov N, Berthold P, Querner U (2004) Migratory orientation offirst-year white storks (Ciconia ciconia): inherited information andsocial interactions. J Exp Biol 207(6):937–943. https://doi.org/10.1242/jeb.00853
Coltman DW, O'Donoghue P, Jorgenson JT, Hogg JT (2003) Undesirableevolutionary consequences of trophy hunting. Nature 426(6967):655–658. https://doi.org/10.1038/nature02177
Conradt L, Roper TJ (2003) Group decision-making in animals. Nature421(6919):155–158. https://doi.org/10.1038/nature01294
Couzin ID (2009) Collective cognition in animal groups. Trends CognSci 13(1):36–43. https://doi.org/10.1016/j.tics.2008.10.002
Couzin ID, Krause J, Franks NR, Levin SA (2005) Effective leadershipand decision-making in animal groups on the move. Nature433(7025):513–516. https://doi.org/10.1038/nature03236
Dodson JJ (1988) The nature and role of learning in the orientation andmigratory behavior of fishes. Environ Biol Fish 23(3):161–182.https://doi.org/10.1007/BF00004908
Fagan WF, Cantrell RS, Cosner C, Mueller T, Noble AE (2012)Leadership, social learning, and the maintenance (or collapse) ofmigratory populations. Theor Ecol 5(2):253–264. https://doi.org/10.1007/s12080-011-0124-2
Fagan WF, Lewis MA, Auger-Méthé M, Avgar T, Benhamou S, Breedet al (2013) Spatial memory and animal movement. Ecol Lett16(10):1316–1329. https://doi.org/10.1111/ele.12165
Foley C, Pettorelli N, Foley L (2008) Severe drought and calf survival inelephants. Biol Lett 4(5):541–544. https://doi.org/10.1098/rsbl.2008.0370
Guttal V, Couzin ID (2011) Leadership, collective motion and the evolu-tion of migratory strategies. Commun Integr Biol 4(3):294–298.https://doi.org/10.4161/cib.4.3.14887
Hayakawa Y, Furuhashi S (2012) Group-size distribution of skeins ofwild geese. Phys Rev E 86(3):031924. https://doi.org/10.1103/PhysRevE.86.031924
Higdon JW, Hauser DDW, Ferguson SH (2012) Killer whales (Orcinusorca) in the Canadian Arctic: distribution, prey items, group sizes,and seasonality. Mar Mammal Sci 28(2):E93–E109. https://doi.org/10.1111/j.1748-7692.2011.00489.x
Huse G, Railsback S, Fernö A (2002) Modelling changes in migrationpattern of herring: collective behaviour and numerical domination. JFish Biol 60(3):571–582. https://doi.org/10.1111/j.1095-8649.2002.tb01685.x
Huse G, Fernö A, Holst JC (2010) Establishment of new wintering areasin herring co-occurs with peaks in the ‘first time/repeat spawner’
Theor Ecol (2018) 11:257–270 269

ratio. Mar Ecol Prog Ser 409:189–198. https://doi.org/10.3354/meps08620
Kieffer JD, Colgan PW (1992) The role of learning in fish behaviour. RevFish Biol Fish 2(2):125–143. https://doi.org/10.1007/BF00042881
King AJ, Cowlishaw G (2009) Leaders, followers, and group decision-making. Commun Integr Biol 2(2):147–150. https://doi.org/10.4161/cib.7562
Krützen M, Sherwin WB, Connor RC, Barré LM, Van de Casteele T,Mann J, Brooks R (2003) Contrasting relatedness patterns inbottlenose dolphins (Tursiops sp.) with different alliance strategies.Proc R Soc Lond B Biol Sci 270(1514):497–502. https://doi.org/10.1098/rspb.2002.2229
McCracken GF, Gustin MK (1991) Nursing behavior in Mexican free-tailed bat maternity colonies. Ethology 89(4):305–321
McQuinn IH (1997) Metapopulations and the Atlantic herring. Rev FishBiol Fish 7(3):297–329. https://doi.org/10.1023/A:1018491828875
Misund OA (1993) Dynamics of moving masses: variability in packingdensity, shape, and size among herring, sprat, and saithe schools.ICES J Mar Sci 50(2):145–160. https://doi.org/10.1006/jmsc.1993.1016
Mueller T, O’Hara RB, Converse SJ, Urbanek RP, Fagan WF (2013)Social learning of migratory performance. Science 341(6149):999–1002. https://doi.org/10.1126/science.1237139
Nelson ME (1998) Development of migratory behavior in northernwhite-tailed deer. Can J Zool 76(3):426–432. https://doi.org/10.1139/z97-207
Newmark WD (2008) Isolation of African protected areas. Front EcolEnviron 6(6):321–328. https://doi.org/10.1890/070003
Pratt JG (1954) An investigation of homing ability in pigeons withoutprevious homing ability. J Exp Biol 32:70–83
Reebs SG (2000) Can a minority of informed leaders determine the for-aging movements of a fish shoal? Anim Behav 59(2):403–409.https://doi.org/10.1006/anbe.1999.1314
Richard KR, Dillon MC, Whitehead H, Wright JM (1996) Patterns ofkinship in groups of free-living sperm whales (Physetermacrocephalus) revealed by multiple molecular genetic analyses.
Proc Natl Acad Sci 93(16):8792–8795. https://doi.org/10.1073/pnas.93.16.8792
Sutton RS, Barto AG, Williams RJ (1992) Reinforcement learning isdirect adaptive optimal control. IEEE Control Syst 12(2):19–22.https://doi.org/10.1109/37.126844
Trippel EA (1995) Age at maturity as a stress indicator in fisheries.Bioscience 45(11):759–771. https://doi.org/10.2307/1312628
Urbanek RP, Fondow LE and Zimorksi SE (2010) Survival, reproduction,and movements of migratory whooping cranes during the first sevenyears of reintroduction. North American Crane WorkshopProceedings. Paper #142
Valenzuela LO, Sironi M, Rowntree VJ, Seger J (2009) Isotopic andgenetic evidence for culturally inherited site fidelity to feedinggrounds in southern right whales (Eubalaena australis). Mol Ecol18(5):782–791. https://doi.org/10.1111/j.1365-294X.2008.04069.x
Valsecchi E, Hale P, Corkeron P, Amos W (2002) Social structure inmigrating humpback whales (Megaptera novaeangliae). Mol Ecol11(3):507–518. https://doi.org/10.1046/j.0962-1083.2001.01459.x
Ward AJ, Sumpter DJ, Couzin ID, Hart PJ, Krause J (2008) Quorumdecision-making facilitates information transfer in fish shoals. ProcNatl Acad Sci 105(19):6948–6953. https://doi.org/10.1073/pnas.0710344105
Wilcove DS, Wikelski M (2008) Going, going, gone: is animal migrationdisappearing. PLoS Biol 6(7):e188. https://doi.org/10.1371/journal.pbio.0060188
Williams TC, Ireland LC,Williams JM (1973) High altitude flights of thefree-tailed bat, Tadarida brasiliensis, observed with radar. JMammal 54(4):807–821. https://doi.org/10.2307/1379076
Wiltschko R, Wiltschko W (2003) Avian navigation: from historical tomodern concepts. Anim Behav 65(2):257–272. https://doi.org/10.1006/anbe.2003.2054
Wright J, Stone RE, Brown N (2003) Communal roosts as structuredinformation centres in the raven, Corvus corax. J Anim Ecol72(6):1003–1014. https://doi.org/10.1046/j.1365-2656.2003.00771.x
270 Theor Ecol (2018) 11:257–270