small sample performance of dynamic panel data estimators...
TRANSCRIPT

Small Sample Performance of Dynamic Panel DataEstimators: A Monte Carlo Study on the Basis of
Growth Data
Nazrul IslamDepartment of Economics
Emory University
Current Draft: August, 1998
---------------------------------------------------------------------Initial versions of this paper were presented in seminars at Harvard University and
Emory University. I would like to thank the participants of these seminars whose commentshelped improve this paper. All remaining errors are mine.

1
Small Sample Performance of Dynamic Panel DataEstimators: A Monte Carlo Study on the Basis of Growth
Data
1. Introduction
This paper investigates the small sample properties of dynamic panel data estimators
as applied for estimation of growth-convergence equation using Summers-Heston (1988,
1991) data set. It shows that, among various estimators used for this purpose, the ones not
using lagged dependent variable as instrument perform better than the ones that do. This is
an important result, which is useful in assessing the results on convergence equation
presented recently by different authors using different dynamic panel data estimators.
One of the issues around which new growth literature has evolved is that of
convergence. Statistically, convergence has been interpreted as a negative correlation
between initial level of income and subsequent growth rate. Hence, the popular method for
testing convergence hypothesis has been to conduct growth-initial level regressions. For a
long time, these regressions were estimated using cross-section data only. However, in the
early nineties, it was observed that the cross-section approach suffers from certain important
limitations in this regard. This led to the panel approach, and since then use of panel data in
estimating the convergence equation has become quite common
Close scrutiny show that the growth-initial level regression is actually a dynamic
panel data model. This provides the rationale for using dynamic panel data estimators. The
resulting panel estimates generally differ from the cross-section estimates. However, they
also differ among themselves. This poses a problem because the properties of the dynamic
panel data estimators are mostly asymptotic, and hence, their small sample properties are a-
priori not known. It is therefore difficult to judge which of the different panel estimates are
more reasonable.
The Monte Carlo study presented in this paper is a response to this difficulty. It is
customized to the data set and specification that are generally used in growth and
convergence studies. The estimators included in this study are the instrumental variable (IV)
estimators of Anderson and Hsiao (1981, 1982), the multivariate estimators, including the
Minimum Distance estimator, suggested by Chamberlain (1982, 1983), and the generalized

2
method of moments (GMM) estimators proposed by Arellano (1989a, 1989b) and Arellano
and Bond (1991). In addition, we also include conventional estimators like the ordinary least
squares (OLS), least squares with dummy variable (LSDV), and a few other simultaneous
equations estimators.
Two things emerge from this exercise. First, wide variation is actually observed in
the results from different dynamic panel estimators. Second, estimators that rely on further
lagged values of the dependent variable as instruments perform worse than the estimators
that do not rely on them as instruments. These two results together suggest that significant
caution should accompany presentation of results from specific panel estimator. In fact, it
seems desirable that researchers check out the reliability of their panel results by conducting
their own Monte Carlo experiments.
2. Previous Monte Carlo Studies
The issue of small sample properties of dynamic panel data estimators is not entirely
new. There have been earlier attempts to investigate it. For example, Nerlove (1967)
considers a simple auto-regressive model with no exogenous variable, and compares the
performance of OLS, LSDV, MLE, and several variants of GLS in estimating the model. In
Nerlove (1971), the dynamic panel data model is extended to have exogenous variable. This
allows consideration of instrumental variable (IV) estimator with lagged values of the
exogenous variable as instrument. It also allows having another variant of two-stage GLS.
Overall, Nerlove’s Monte Carlo results favor GLS estimators over other estimators.
Since Nerlove’s work, there have been significant developments in the field of
dynamic panel data estimators. Among these has been introduction of Anderson and Hsiao
IV estimators which use further lagged values of the dependent variable as instruments.
Arellano has carried this idea forward and has proposed using all possible further lagged
variables as instruments within a GMM framework. Arellano and Bond (1991) perform a
Monte Carlo study to compare primarily the small sample properties of their GMM
estimators with the corresponding properties of Anderson-Hsiao estimators. According to
their results, the GMM estimators perform better than Anderson-Hsiao IV estimators though
not so much in terms of bias as in terms of dispersion.

3
3. Objectives of the Present Study
Given these earlier studies, what can be the motivation for the Monte Carlo study
presented in this paper? There are several of them. First, Monte Carlo results have been
generally found to be more useful when these are customized to the particular model, data
set, and range of parameter values that pertain to the actual problem to which application of
panel data estimators is being considered. Thus, in view of the controversy regarding
convergence parameter estimates, it is useful to have Monte Carlo results that are specific to
the growth-convergence equation, specific to the Summers-Heston growth data set, and
specific to the pertinent range of parameter values. This is exactly what is done in this
exercise. This also leads to the following second motivation. The previous Monte Carlo
studies have generally focussed on panel data models with random individual effects.
However, the individual effect that arises in the growth-convergence equation is of
correlated nature. There have been no Monte Carlo results, as far as we know, on models
with correlated effects. The third motivation for this study arises from the fact that several
important dynamic panel estimators do not find place in the earlier Monte Carlo studies.
Among these are the estimators that use the multivariate approach, like the three stage least
squares (3SLS) and generalized three stage least squares (G3SLS). In addition,
Chamberlain’s MD estimator also remains outside the purview of the previous Monte Carlo
studies. The MD estimator using optimal weighting matrix, sometimes referred to as
Optimal Minimum Distance Estimator (OMDE), has been used as the benchmark for
judging theoretical efficiency of many of the GMM estimators proposed by Arellano. So it is
of some interest that Monte Carlo study covered these estimators as well. The present study
takes a comprehensive view and includes almost all the known dynamic panel data
estimators for evaluation. Fourth, the present study does not limit itself to only one
particular generating mechanism of the transitory error term. Instead, it considers three
different generating schemes are considered, namely uncorrelated, autoregressive, and
moving average. Finally, the study also investigates the impact of sample size on relative
performance of the estimators. This is very relevant for the problem at hand. The
convergence equation has generally been estimated in the context of two different samples
of countries, one being small and the other, large. It is therefore necessary to see how
different estimators perform in these samples of different size.

4
Model and Parameter Values
The Model
The dynamic panel data model that arises in the convergence literature is as follows:
(1) ittititiit xyy νηµβα ++++= −− 1,1, .
Here ity represents log of per capita GDP of country i at time t, 1, −tiy is the same
lagged by one period, and 1, −tix is the difference in the log of investment and population
growth variables of country i at time t-1. Finally, iµ and tη are the individual and time
effect terms, and itν is the transitory error which varies across both individual and time.
The most important issue for a panel model is specification of the individual effect
term iµ . Growth theory implies that iµ is correlated with the included explanatory variable
1, −tix . This means that the random-effects assumption is not appropriate for this model. The
most appropriate model is that of correlated effects. However, there are different ways to
specify this correlation. Of the linear specifications, the simplest is the one proposed by
Mundlak (1971), whereby the individual effect term is assumed to be a linear function of the
mean (over time) of the exogenous variable for the individual concerned.1 Chamberlain
suggests a more general specification whereby the individual effect term is a linear function
of the exogenous variable for all the time periods with varying coefficients. This still leaves
out the possibility for specification to be non-linear, but interpreted as linear predictor, this
does not involve any restriction. According to this more general specification, we have
(2) iTTiii xxx ωλλλλµ +++++= − 112010 Λ ,
with iω distributed as ),0( 2ωσN .2
Parameter Values
1 However, if the transitory error term itν is serially uncorrelated, then this specification of the individualeffect renders the random-effects model to be equivalent to the fixed effects model.2 Another issue that arises here is that of dealing with the time effect term tη . One possible approach in thisregard is running residual regression, which in this case would mean subtracting out the cross-section meansfrom the variables included in the equation. The other approach is to include appropriate set of time dummies.

5
Considered in full, the model presented in equation (1) and (2) has three sets of
parameters. Of foremost importance is, of course, the auto-regressive parameter α ,
followed by the slope parameter β , attached to the exogenous variable 1, −tix . The other
group consists of Tλλλ ,,, 10 Κ , parameters that arise from specification of the individual
effect term iµ . Finally, the third set of parameters are those governing the error terms itν
and iω . Their number further increases when itν is considered to be serially correlated. For
itν , the following three processes are considered:
1. Serially uncorrelated with ),0(~ 2νσν Nit .
2. MA (1) process: 1, −+= tiitit εθεν , with ),0(~ 2εσε N .
3. AR (1) process: ittiit ενϕν += − 1, , with ),0(~ 2εσε N .
The values of these parameters for simulation are chosen in a data-dependent
manner. A three-step procedure is employed for this purpose. In the first, we obtain
consistent estimates of α and β using itx ’s as instruments. These are used to compute the
composite residual )( itit νµη ++ . These residuals are then regressed on itx ’s to get
estimates of λ’s and of the time dummies. The residuals from this second regression are
then used to get the parameters of different generating mechanisms of itν .3 Table-1 gives the
values of those parameters of the model that stay the same under all different generating
schemes of itν .
In growth-convergence studies, three different samples have been frequently used.
Following Mankiw et al. (1992), these may be named as NONOIL, INTER, and OECD. Of
these, OECD is the smallest and consists of 22 OECD countries. NONOIL is the largest and
consists of most of the sizable countries of the world for which oil extraction is not the
dominant economic activity. This sample consists of 96 countries. Finally, INTER is an
intermediate sample comprised of all those countries included in NONOIL except those for
which data quality is not that satisfactory. This sample has 74 countries.
3 Details regarding these steps can be obtained from the author upon request.
6
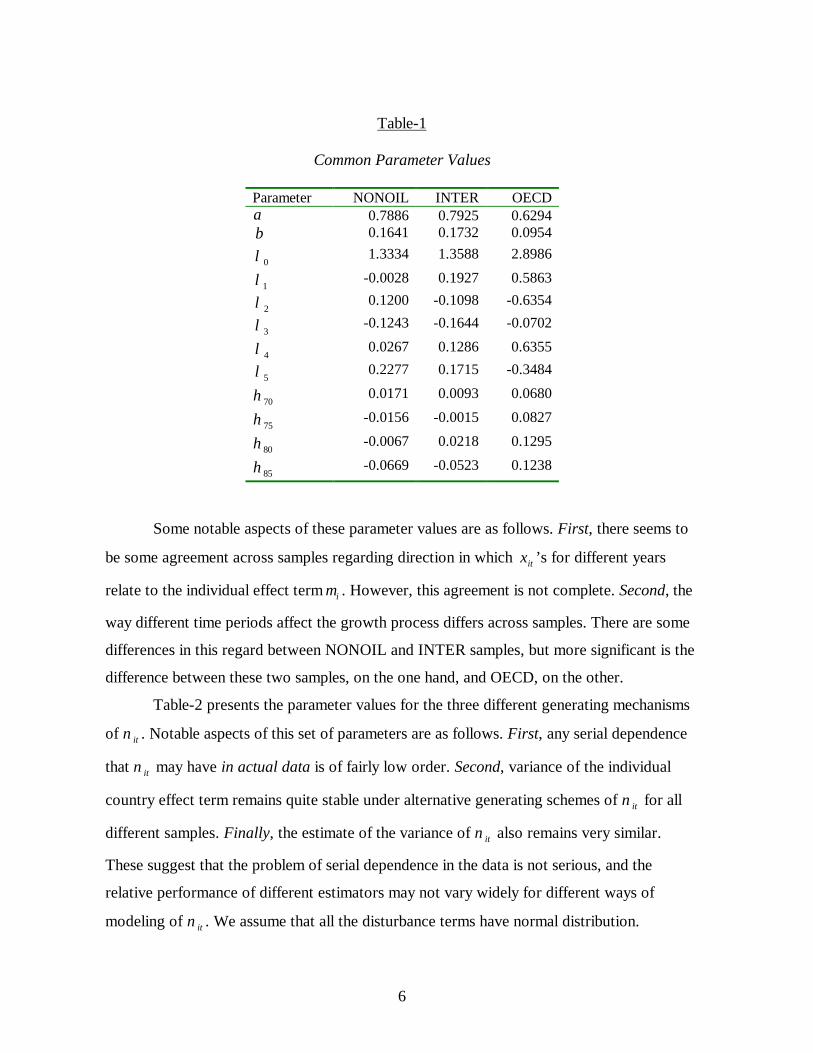
Table-1
Common Parameter Values
Parameter NONOIL INTER OECDα 0.7886 0.7925 0.6294β 0.1641 0.1732 0.0954
0λ 1.3334 1.3588 2.8986
1λ -0.0028 0.1927 0.5863
2λ 0.1200 -0.1098 -0.6354
3λ -0.1243 -0.1644 -0.0702
4λ 0.0267 0.1286 0.6355
5λ 0.2277 0.1715 -0.3484
70η 0.0171 0.0093 0.0680
75η -0.0156 -0.0015 0.0827
80η -0.0067 0.0218 0.1295
85η -0.0669 -0.0523 0.1238
Some notable aspects of these parameter values are as follows. First, there seems to
be some agreement across samples regarding direction in which itx ’s for different years
relate to the individual effect term iµ . However, this agreement is not complete. Second, the
way different time periods affect the growth process differs across samples. There are some
differences in this regard between NONOIL and INTER samples, but more significant is the
difference between these two samples, on the one hand, and OECD, on the other.
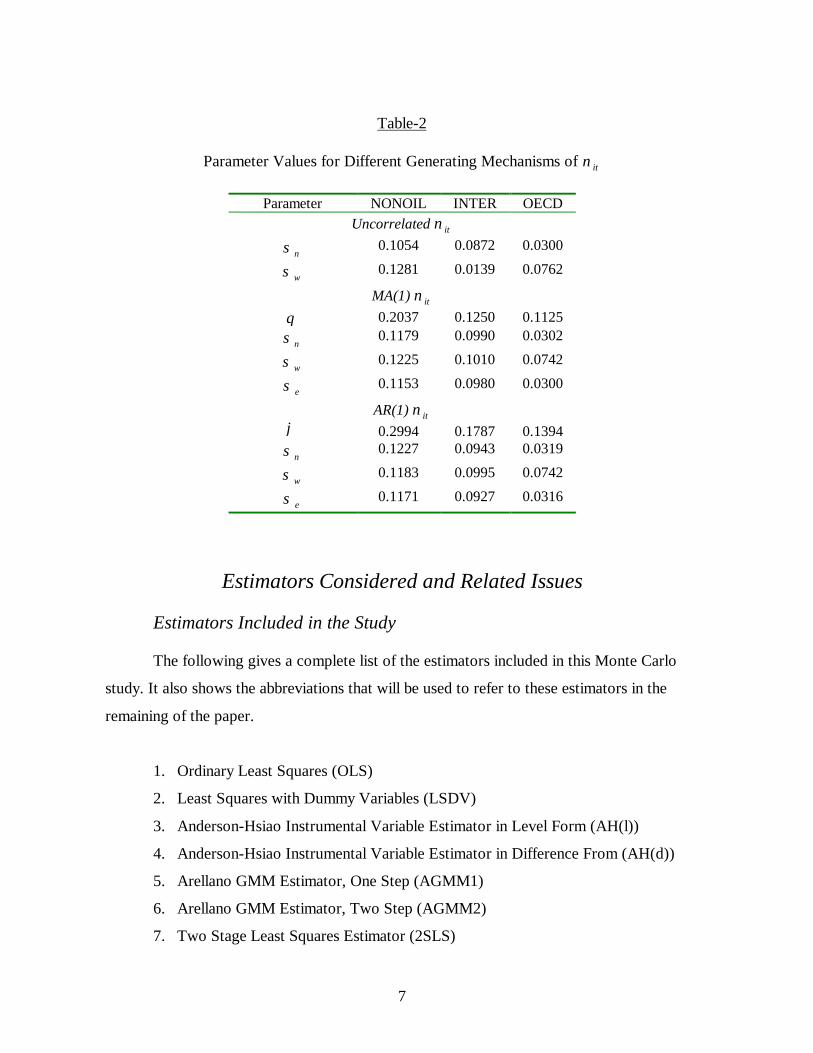
Table-2 presents the parameter values for the three different generating mechanisms
of itν . Notable aspects of this set of parameters are as follows. First, any serial dependence
that itν may have in actual data is of fairly low order. Second, variance of the individual
country effect term remains quite stable under alternative generating schemes of itν for all
different samples. Finally, the estimate of the variance of itν also remains very similar.
These suggest that the problem of serial dependence in the data is not serious, and the
relative performance of different estimators may not vary widely for different ways of
modeling of itν . We assume that all the disturbance terms have normal distribution.
7
Table-2
Parameter Values for Different Generating Mechanisms of itν
Parameter NONOIL INTER OECDUncorrelated itν
νσ 0.1054 0.0872 0.0300
ωσ 0.1281 0.0139 0.0762
MA(1) itνθ 0.2037 0.1250 0.1125
νσ 0.1179 0.0990 0.0302
ωσ 0.1225 0.1010 0.0742
εσ 0.1153 0.0980 0.0300
AR(1) itνϕ 0.2994 0.1787 0.1394
νσ 0.1227 0.0943 0.0319
ωσ 0.1183 0.0995 0.0742
εσ 0.1171 0.0927 0.0316
Estimators Considered and Related Issues
Estimators Included in the Study
The following gives a complete list of the estimators included in this Monte Carlo
study. It also shows the abbreviations that will be used to refer to these estimators in the
remaining of the paper.
1. Ordinary Least Squares (OLS)
2. Least Squares with Dummy Variables (LSDV)
3. Anderson-Hsiao Instrumental Variable Estimator in Level Form (AH(l))
4. Anderson-Hsiao Instrumental Variable Estimator in Difference From (AH(d))
5. Arellano GMM Estimator, One Step (AGMM1)
6. Arellano GMM Estimator, Two Step (AGMM2)
7. Two Stage Least Squares Estimator (2SLS)

8
8. Three Stage Least Squares Estimator (3SLS)
9. Generalized Three Stage Least Squares Estimator (G3SLS)
10. Minimum Distance Estimator (MD)
Brief description of these estimators, as applied to the model considered in this
study, is provided in Appendix. We can, therefore, directly proceed to presentation of the
Monte Carlo work.
Sample Size and Related Issues:
Given a certain number of cross-sections available (i.e., given T), different panel data
estimators can make use of different numbers of these in the final stage of estimation. In
simulation, therefore, it is possible to adopt two different approaches. First, it is possible to
keep the actual number of cross-sections used by the estimators the same by generating
varying number of cross-sections for different estimators. Second, the number of cross-
sections generated may be kept the same, and the number of actual cross-sections used in the
final stage of estimation by different estimators may be allowed to vary. It is the second
situation that a researcher faces in actual practice. She confronts a given data set and then
has to choose from among different estimators depending on their relative merits. In order to
conform to this real situation, this study adopts the second approach. This also conforms to
the fact that this Monte Carlo study is based on a given data set, namely Summers-Heston
growth data set. The panel based on this data set is considered at five-year intervals. Thus,
the data available are for 1960, 1965, 1970, 1975, 1980, and 1985. Since this is a dynamic
model as given by equation (1), the effective T equals to five.
Issues Particular to Individual Estimators
OLS:
OLS, the simplest of all estimators considered, is applied to the equation in the level
form. Since initial values of ity (i.e., of 1960) are known, OLS can use in actual estimation
all of the T cross-sections. OLS, however, is not geared to providing estimates of either tλ’s
or iµ ’s. It gives an estimate of the composite error term itu but cannot provide its further
9
decomposition into the component parts, iµ and itν . Also, OLS is inconsistent even with T
going to infinity.
LSDV:
LSDV is also applied to the equation in level form and, for the same reasons as with
OLS, all of the T cross-sections can be used in actual estimation. It can provide estimates of
iµ ’s (viewed as parameters to be estimated) and hence of tλ’s, from a subsequent
regression of the estimated iµ on the itx s. Also, it can give estimates of variances of the
two error components separately. The between-group variations or, more directly, variance
of the estimated iµ ’s, can be used to get an estimate of 2µσ . On the other hand, 2
vσ may be
obtained from the within-group variations. LSDV estimator, though not consistent in the
direction of N, is consistent when T goes to infinity.
AH(l) and AH(d):
Both these IV estimators apply to the model in first-differenced form. This results in
the ‘loss’ of one cross-section from the actual estimation exercise. Furthermore, since in
AH(l) 2, −tiy is used as instrument for )( 2,1, −− − titi yy , one more cross-section is lost in the
process. Thus, if T cross-sections are available, the number of cross-sections actually used is
(T-2). AH(l) is mainly geared to consistent estimation of the slope parameters α and β . It
can also provide an estimate of 2νσ . However, other parameters of the model cannot be
recovered using this estimator. AH(d) has similar features as those of AH(l). However, since
AH(d) uses )( 3,2, −− − titi yy as instrument for )( 2,1, −− − titi yy , two cross-sections are lost in
the process. Hence with T cross-sections available, only (T-3) are used. When T is small, this
may be an important consideration.
AGMM(1) and AGMM(2):
Like the AH estimators, both AGMM(1) and AGMM(2) work with the model in first
differenced form. This results in loss of one cross-section from the actual estimation process.
AGMM(1) is based on arbitrary weighting matrix, whereas in AGMM(2) the weighting
matrix is appropriately constructed using residuals from AGMM1 estimation. The details of

10
the construction of the instrument matrix have been sketched in Appendix. Like AH
estimators, these estimators are also geared to estimation of α and β , and do not provide
estimates of the remaining parameters.
2SLS, 3SLS, and G3SLS:
This set of estimators may be commonly referred to as Simultaneous Equation (SE)
estimators. All of them apply to the model in first differenced form. Thus, if T is the number
of cross-sections available, the number of equations used in estimation is (T-1). These
estimators are also geared to estimation of α and β .4 One issue in G3SLS estimation is
which residuals to use for construction of the covariance matrix. The residuals can be
obtained from either 2SLS or 3SLS or even from a generalized 2SLS. However, this does
not change the asymptotic properties of the estimator. In this study residuals from 2SLS are
used for both 3SLS and G3SLS.
MD:
In contrast with AH, AGMM, and SE estimators, MD works with the model in
levels. Hence, all the cross-sections available can be used in estimation. Instead of
eliminating iµ through first differencing, as other estimators do, MD specifies iµ in terms
of its correlation with itx ’s, and uses this specification to substitute for iµ . Hence, his
estimator can provide estimates not only of the slope parameters of the main dynamic
equation but also of the tλ’s. However, this also makes MD a non-linear estimation
procedure. An important issue in MD estimation, therefore, is of setting initial values of the
parameters for non-linear iteration to proceed. The task is made difficult by the fact that, in
case of a simulation exercise, the true parameter values are known! A related question is
whether to use the same set of initial values to start the iteration for each replication or to
change it over replications. In this study, we resolve these issues in the following manner.
4 However, in principle it is possible to add the equation for iµ to the system. This raises the number of
equations to T and allows having estimates of tλ ’s. However, inclusion of the equation for iµ into the system
does not affect the asymptotic properties of the estimates of α and β because there are no across-equation
restrictions between the equation for iµ and those for ty ’s.
11
It is impossible to set ‘arbitrary’ initial values that are free from prior knowledge of
the true parameter values because they are known! Hence, it is preferable to have these
initial values result from a routine, for example, from a preliminary estimation procedure.
This also resolves the other question and allows the initial values to be data-dependent and
hence be different across replications. However, the question that arises is, which particular
estimator to use for generating the initial parameter values? It is clear that LSDV is the most
likely candidate because it is the only estimator other than MD that provides estimates of not
onlyα and β but also of the tλ s.
In MD estimation, there is also the issue of choosing the weighting matrix. There are
several options in this regard and the optimality of the estimates depends on the choice. This
study uses the optimal weighting matrix, which takes full account of possible
heteroskedasticity across individuals.
Simulation Results and Discussion
It is apparent from the discussion above that not all the panel estimators are geared to
provide estimate all the parameters of the model. Because of this and also in order not to
clutter the presentation with too many numerical results, we focus here on results concerning
only α and β , the main parameters of the model.5 The simulation results presented in this
paper are on the basis of one thousand replications. In most cases, Monte Carlo distributions
stabilized already with one hundred replications. Hence increasing the number of
replications by any further was not necessary.
The detailed results regarding the Monte Carlo distributions obtained from the study
are provided in three sets of tables in the Appendix for three different generating
mechanisms of itν . Tables A1 to A3 show results for different samples when itν is serially
uncorrelated. Similarly, Tables A4 to A6 give results when itν follows an MR(1) process.
Finally, Tables A7 to A9 give results when itν obeys an AR(1) scheme.
The two criteria that are usually used in judging performance of an estimator are bias
and mean square error (MSE). In order to make assessment of performance of the estimators
5 Hence, we do not report the results regarding the error variances.
12
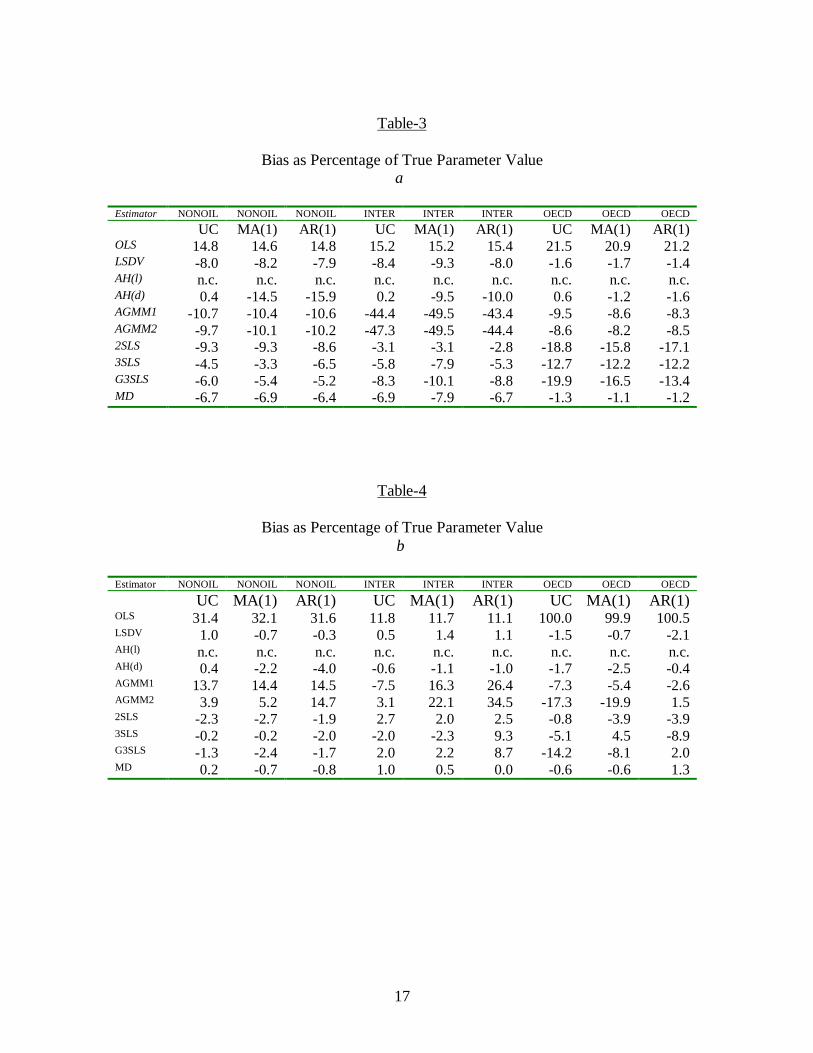
easier, we present tables showing relative bias and relative magnitude of root mean square
error. Tables 3 and 4 provide relative magnitudes of bias, and Tables 5 and 6 show relative
magnitudes of root mean square error for the estimates of α and β , respectively. The
following general features emerge from the simulation results.
First, a notable aspect of the results is the unsatisfactory performance of AH(l). The
point estimates produced by this estimator fluctuate very widely. This finds expression in
large standard deviations of Monte Carlo distributions obtained for this estimator. The
unsatisfactory performance of AH (l) contrasts sharply with better performance of AH(d).
Both these estimators rely on the assumption of orthogonality of lagged ty with itν . This
assumption holds only when itν is serially uncorrelated. Therefore, one would expect both
these estimators to perform well when itν is serially uncorrelated, and both of them to
perform poorly when itν is either AR(1) or MA(1). However, as can be seen from the
relevant tables, AH(d) performs relatively well under all different generation mechanisms of
itν and for all samples, while the performance of AH(l) is found to be unsatisfactory under
all different generation mechanisms of itν , and particularly for NONOIL and INTER
samples. The explanation, as it turns out, lies in the difference in the degree to which
instruments are correlated with the explanatory variable. It is found that )( 3,2, −− − titi yy , the
instrument used by AH(d), is strongly correlated with the explanatory variable
)( 2,1, −− − titi yy , while 2, −tiy , the instrument used by AH(l), is very poorly correlated with
)( 2,1, −− − titi yy . This poor correlation finds reflection in astronomically large values of
standard error estimates for AH(l).6 These results testify to the general rule that, in order to
be successful, it is not sufficient for an instrument to be just uncorrelated with the error term,
it also has to be adequately correlated with the explanatory variable for which it acts as an
instrument.
Second, as we noticed, the degree of serial correlation in itν is very mild. As
suspected on the basis of a-priori reasoning, this mildness of serial correlation imparts a
general pattern to the simulation results. For most of the estimators, the performance does
6 Computation of these standard errors involves the inverse of this correlation matrix.

13
not vary to a great extent with respect to the alternative generating scheme of itν . We have
already seen this in the context of the AH estimators. Going by the results on α , this is true
even for AGMM1 and AGMM2. This is somewhat surprising because these estimators
depend rather heavily for their validity on orthogonality of lagged values of ity to itν , and
this orthogonality is violated when itν follows either an AR or a MA scheme.7
Third, performance of many of the estimators shows considerable variation with
respect to the sample considered. However, it is difficult to establish a single pattern in this
regard. For example, going by the results on bias of estimated α , performance of OLS
deteriorates for OECD when compared with that for either NONOIL or INTER samples.
However, in case of LSDV and MD, the opposite is true. The AGMM and SEM estimators
show yet a different kind of contrast. The performance of the AGMM estimators deteriorates
for INTER sample in comparison with that for either NONOIL or OECD. In case of SEM
estimators, the opposite is true. The contrasting performance of AGMM and SEM estimators
may not be entirely surprising in view of the fact that while the former depends on lagged
ity ’s as instruments, SEM estimators rely entirely on itx ’s.
Fourth, comparison of the performance of 3SLS and G3SLS with that of 2SLS
yields mixed results. In the NONOIL sample, regardless of generating mechanism for itν ,
results from 3SLS and G3SLS estimators seem to be better than that from 2SLS. For INTER
sample, however, 2SLS seems to perform better than either 3SLS or G3SLS. In case of the
OECD sample, the situation is less clear cut. In terms of mean of the Monte Carlo
distribution, 3SLS and G3SLS fare better than 2SLS, though not in terms of dispersion. On
the other hand, in the OECD sample, the Monte Carlo distributions for 2SLS have very large
standard deviation.
One reason for deterioration of performance of 3SLS and G3SLS estimators in
INTER and OECD samples, when compared to that in NONOIL sample, may lie in sample-
size. The sizes of INTER and OECD samples are smaller that that of NONOIL. Since the
7 To be accurate, it needs to be mentioned that AH(d) does show some expected sensitivity with respect to thegeneration scheme of itν . Why similar sensitivity is not found in the performance of the AGMM estimators isan interesting question.
14
superiority of 3SLS and G3SLS over 2SLS is an asymptotic result, a larger sample size may
help this result to surface.
Fifth, the MD estimator performs better in comparison with AGMM estimators. With
regard to α , this is particularly true for INTER and OECD samples. For β this is true for
all different samples. In terms of bias, some of the SEM estimators perform slightly better
than MD in some of the samples. Thus, for example, with regard to α , 3SLS and G3SLS
show less bias than MD in NONOIL and INTER samples. However, in case of OECD, the
bias involved with the former estimators is much larger than with the latter. Regarding β ,
MD estimator shows less bias than by SEM estimators for INTER sample as well. Even for
the NONOIL sample, the bias involved with the MD is similar to and sometimes less than
that with SEM estimators.
Bias of the Monte Carlo distributions needs to be evaluated in conjunction with
corresponding dispersion. Mean Square Error (MSE) is the popular measure that is used to
take into account the possible trade-off between bias and variance. Looking at the values of
root MSE (presented in Tables 5 and 6) of Monte Carlo distribution of the parameter
estimates, we see that the MD estimator proves to be uniformly superior to AGMM and
SEM estimators. The only exception in this regard is the performance of 2SLS in estimating
β in the INTER sample. We earlier noted somewhat erratic performance of AH(d). In terms
of bias, it performs better than MD in some isolated cases. However, in terms of root MSE,
except for one lone exception, MD outperforms AH(d).
Thus, overall, among the N-consistent estimators, MD appears to be a more
dependable estimator for estimating the growth convergence equation using Summers-
Heston data set. One problem noticed with MD estimator for the problem at hand is its
sensitivity with respect to the starting values of iteration procedure. However, in case of a
single estimation exercise, it is possible to explore this sensitivity by looking at the
minimum distance statistic of the converged results obtained from different starting values.
Applying this procedure, it can be ensured that a global maximum is reached, and not a local
one.
One surprising aspect of the results was the relatively better performance of LSDV.
In terms of both bias and root MSE, and in estimation of both α and β , LSDV proves to be
a relatively superior estimator for the problem at hand. This is somewhat surprising given

15
that theoretically LSDV is consistent only in the direction of T, and the data used in this
study has a small T. What this shows is that small sample properties of estimators may be
very specific to the model and data considered.
From another point of view, it is also interesting to note that simpler estimators such
as LSDV and 2SLS (and in some cases, AH(d)) outperform more sophisticated estimators
such as AGMM2 and some of the SEM estimators. This helps draw attention to the
following important fact. The optimal properties of sophisticated estimators often depend on
use of optimal weighting matrix. Unfortunately however, these weighting matrices have to
be estimated, and as a result, they pick up, along with signal, noise present in the data. This
noise gets transmitted to the final parameter estimates when these are produced using the
estimated weighting matrices. To the extent that simpler estimators do not have to use
estimated weighting matrices, they are spared of this potential source of additional noise.
This explains why sophisticated estimators may actually perform worse than simpler
estimators, though this does not necessarily have to be the case.
Conclusions
Two kinds of results emerge from this investigation of small sample properties of
dynamic panel estimators in the context of the growth convergence equation and Summers-
Heston data. On the one hand, there are specific results concerning the problem at hand. On
the other hand, there are more general aspects of these specific results. Among the specific
results, the following stand out. First, parameter estimates produced by different dynamic
panel data estimators are indeed found to vary widely. This should act as a caution for
researchers who are increasingly turning to panel data methods in investigating growth and
convergence issues. Use of panel data presents advantages that are not available within the
confines of cross-section data. However, these advantages come with some problems. The
possibility of small sample bias is one of them. It seems desirable that researchers using
panel estimators tried to check into the small sample properties of the estimators in
respective particular contexts. Second, for estimation of the convergence equation using
Summers-Heston data, it seems that, in general, estimators not relying of further lagged
dependent variable as instrument perform better than those which do rely on them. Third,

16
the least squares with dummy variables prove very satisfactory for this particular model and
particular data set.
Among the general aspects of these concrete results, the following may be noted.
First, asymptotic equivalence of properties may indeed be misleading. Monte Carlo
investigations are helpful to have some idea about the small sample behavior of the
estimators. Second, sometimes, small sample property may be quite at variance from that
suggested by the theoretical properties. This is exemplified by the performance of LSDV in
this exercise. Third, although sophisticated estimators generally have more desirable
theoretical properties, in practice their implementation requires use of estimated weighting
matrices. Sampling variability and other noise picked up in estimating the weighting
matrices may often cause the sophisticated estimators perform worse than their simpler
counterparts. Fourth, the results confirm the general rule that to be successful instruments
should not only be uncorrelated with the error term but also sufficiently correlated with the
variables for which they are working as instrument.
17
Table-3
Bias as Percentage of True Parameter Valueα
Estimator NONOIL NONOIL NONOIL INTER INTER INTER OECD OECD OECD
UC MA(1) AR(1) UC MA(1) AR(1) UC MA(1) AR(1)OLS 14.8 14.6 14.8 15.2 15.2 15.4 21.5 20.9 21.2LSDV -8.0 -8.2 -7.9 -8.4 -9.3 -8.0 -1.6 -1.7 -1.4AH(l) n.c. n.c. n.c. n.c. n.c. n.c. n.c. n.c. n.c.AH(d) 0.4 -14.5 -15.9 0.2 -9.5 -10.0 0.6 -1.2 -1.6AGMM1 -10.7 -10.4 -10.6 -44.4 -49.5 -43.4 -9.5 -8.6 -8.3AGMM2 -9.7 -10.1 -10.2 -47.3 -49.5 -44.4 -8.6 -8.2 -8.52SLS -9.3 -9.3 -8.6 -3.1 -3.1 -2.8 -18.8 -15.8 -17.13SLS -4.5 -3.3 -6.5 -5.8 -7.9 -5.3 -12.7 -12.2 -12.2G3SLS -6.0 -5.4 -5.2 -8.3 -10.1 -8.8 -19.9 -16.5 -13.4MD -6.7 -6.9 -6.4 -6.9 -7.9 -6.7 -1.3 -1.1 -1.2
Table-4
Bias as Percentage of True Parameter Valueβ
Estimator NONOIL NONOIL NONOIL INTER INTER INTER OECD OECD OECD
UC MA(1) AR(1) UC MA(1) AR(1) UC MA(1) AR(1)OLS 31.4 32.1 31.6 11.8 11.7 11.1 100.0 99.9 100.5LSDV 1.0 -0.7 -0.3 0.5 1.4 1.1 -1.5 -0.7 -2.1AH(l) n.c. n.c. n.c. n.c. n.c. n.c. n.c. n.c. n.c.AH(d) 0.4 -2.2 -4.0 -0.6 -1.1 -1.0 -1.7 -2.5 -0.4AGMM1 13.7 14.4 14.5 -7.5 16.3 26.4 -7.3 -5.4 -2.6AGMM2 3.9 5.2 14.7 3.1 22.1 34.5 -17.3 -19.9 1.52SLS -2.3 -2.7 -1.9 2.7 2.0 2.5 -0.8 -3.9 -3.93SLS -0.2 -0.2 -2.0 -2.0 -2.3 9.3 -5.1 4.5 -8.9G3SLS -1.3 -2.4 -1.7 2.0 2.2 8.7 -14.2 -8.1 2.0MD 0.2 -0.7 -0.8 1.0 0.5 0.0 -0.6 -0.6 1.3

18
Table-5
Root MSE as Percentage of True Parameter Valueα
Estimator NONOIL NONOIL NONOIL INTER INTER INTER OECD OECD OECD
UC MA(1) AR(1) UC MA(1) AR(1) UC MA(1) AR(1)OLS 15.0 14.8 14.9 15.3 15.3 15.3 22.3 21.7 22.0LSDV 8.5 8.7 8.5 8.9 9.9 8.7 3.5 3.6 3.6AH(l) n.c. n.c. n.c. n.c. n.c. n.c. n.c. n.c. n.c.AH(d) 8.3 16.6 17.6 5.4 13.9 13.3 7.3 7.2 7.5AGMM1 27.7 27.5 26.7 64.8 70.4 65.9 24.3 21.9 23.7AGMM2 29.6 29.3 28.9 79.7 84.9 77.1 32.9 29.1 31.02SLS 12.1 12.6 12.0 5.1 5.4 5.0 24.3 21.3 23.03SLS 8.5 14.7 10.4 9.6 11.1 8.9 28.4 28.4 23.6G3SLS 10.0 18.1 8.7 11.9 13.8 12.6 40.9 37.6 29.3MD 7.4 7.8 7.4 7.6 8.7 7.6 3.0 3.1 3.2
Table-6
Root MSE as Percentage of True Parameter Valueβ
Estimator NONOIL NONOIL NONOIL INTER INTER INTER OECD OECD OECD
UC MA(1) AR(1) UC MA(1) AR(1) UC MA(1) AR(1)OLS 34.6 35.2 34.7 18.8 18.1 17.7 117.4 116.6 116.0LSDV 12.8 15.3 15.4 12.4 14.5 14.3 40.1 44.9 43.8AH(l) n.c. n.c. n.c. n.c. n.c. n.c. n.c. n.c. n.c.AH(d) 19.9 20.1 19.1 20.3 21.2 18.1 64.9 60.2 62.1AGMM1 147.0 151.9 145.3 148.0 153.8 143.6 243.5 237.9 226.5AGMM2 169.6 169.7 165.1 187.7 205.2 181.9 306.8 284.6 284.12SLS 17.1 18.4 17.5 19.5 20.8 19.3 58.3 54.7 57.93SLS 13.7 21.9 16.1 16.5 15.6 17.8 67.2 64.9 82.5G3SLS 17.5 28.2 15.4 17.8 18.5 23.5 119.4 111.1 149.6MD 13.3 15.4 15.8 12.6 15.1 14.4 40.5 44.6 45.6

19
Appendix on the Estimators
The Appendix provides brief description of the estimators included in the Monte
Carlo study presented in this paper. The details can be found in the appropriate references.
In the following, we ignore the time effects, iη , which can be dealt with in fairly
straightforward manner, as described earlier in the paper.
OLS
In OLS estimation, the unobserved individual effect term is completely ignored and
estimation is carried out on the basis of the equation in levels. Let
y y y y yN iT NT= ′( , , , , , , )11 1Λ Λ Λ ,
y y y y yN i T N T− − −= ′1 10 0 1 1( , , , , , , ), ,Λ Λ Λ , and
),,,,,,( 1,1,010 ′= −− TNTiN xxxxx ΛΛΛ .
Also, let W y x= −[ ]1 . Then the OLS estimator of the parameter vector ( )α β γ′= is given
by
∃ ( )γ= ′ ′−W W W y1 .
The standard errors under homoskedasticity are obtained from Var ( ∃) ( )γ = ′ −s W W2 1 ,
with s e e NT2 2= ′ −/ ( ) , where e y W= −( ∃)γ . The general heteroskedasticity consistent
standard errors are obtained from ( ) ( ) ( )′ ′ ′ ′− −W W W diag ee W W W1 1 . Since Cov y i t i( , ), − ≠1 0µ ,
OLS estimator is biased. It is also inconsistent in the direction of both N and T.
LSDV
In LSDV, the assumption is that the individual effects are fixed. Hence the
straightforward way of implementing LSDV is through insertion of appropriate dummies
and then application of OLS on the enlarged model, hence the name Least Squares with
Dummy Variables. However, computationally, it is simpler to obtain LSDV through within

20
estimation. Averaging equation (1) over time and subtracting it from the original equation
yields
)()()( 1,1,1, iititiitiiit vvxxyyyy −+−+−=− −−− βα ,
where ∑∑∑∑=
−
=−
−
=−−
=====
T
titi
T
ttii
T
ttii
T
titi v
Tvx
Txy
Tyy
Ty
1
1
01,
1
01,1,
1
1and,
1,
1,
1. LSDV
estimation of the original model is equivalent to OLS estimation of the above equation.
Denote )(~and),(~),(~1,1,1,1,1, ititiititiiitit xxxyyyyyy −=−=−= −−−−− . Also, denote
~ (~ , , ~ , , ~ , , ~ )y y y y yN T NT= ′11 1 1Λ Λ Λ ,
~ (~ , , ~ , , ~ , , ~ ), ,y y y y yN T N T− − −= ′1 10 0 1 1 1Λ Λ Λ , and
)~,,~,,~,,~(~1,1,1010 ′= −− TNTN xxxxx ΛΛΛ .
Now, if ~ [~ ~]W y x= − 1 , then the LSDV estimator is given by
∃ ( ~ ~) ~γ= ′ ′−W W W y1 .
Clearly, Cov y y v vi t i it i[( ), ( )], ,− −− −1 1 is not equal to zero. This makes LSDV estimator
biased. It is also inconsistent in the direction of N. However, Amemiya (1967) shows that
LSDV for this model is consistent as ∞→T , and, if the errors are normally distributed,
LSDV is asymptotically equivalent to MLE. The standard errors of the LSDV estimates
under the assumption of homoskedasticity are obtained from Var s W W( ∃) ~ ( ~ ~)γ = ′ −2 1 , with
~ ~ ~ / ( )s e e NT N2 2= ′ − − , where ~ (~ ~ ∃)e y W= − γ .
Anderson and Hsiao Instrumental Variable (IV) Estimators
The two IV estimators proposed by Anderson and Hsiao (1981, 1982) both start by
differencing equation (1) to eliminate the individual effect term iµ . This yields
)()()( 1,2,1,2,1,1, −−−−−− −+−+−=− tiittititititiit vvxxyyyy βα

21
Because of correlation between 1, −tiy and 1, −tiv , instruments are needed. Provided itv is
serially uncorrelated, further lagged values of ity can act as necessary instruments.
AH(l)
Anderson and Hsiao (level) estimator uses yi t, − 2 as instrument. Denote
1,2,1,1,2,1,1,~)(and,~)(,~)( −−−−−−− =−=−=− titititititiittiit xxxyyyyyy . Further, let
vec y y y y yit l N T NT(~ ) [~ , , ~ , , ~ , ~ ]= ′12 2 1Λ Λ Λ
]~,~,,~,,~[)~( 1,1,1111 ′= −− TNTNlit xxxxxvec ΛΛΛ
vec y y y y yi t l N T N T(~ ) [~ , , ~ , , ~ , ~ ], , ,− − −= ′1 11 1 1 1 1Λ Λ Λ
vec y y y y yl N T N T( ) [~ , , ~ , , ~ , ~ ], ,− − −= ′2 10 0 1 2 2Λ Λ Λ .
Define ])~()([and],)~()~([ 1,21,1, ltilltiltil xvecyvecZxvecyvecW −−−− == . Then AH(l)
estimator of γ is given by
∃ ( ) (~ )γ= ′ ′−Z W Z vec yl l l it l1 .
The asymptotic standard error under the assumption of homoskedasticity are obtained from
the formula, Var s Z W Z Z W Zl l l l l l l( ∃) ( ) ( )γ = ′ ′ ′− −2 1 1 , where s e e N Tl l l2 1 2= ′ − −( ) / [ ( ) ] with
e vec y Wl it l l= −(~ ) ∃γ. The general heteroskedasticity consistent standard errors are obtained
from ( ) ( ) ( )′ ′ ′ ′− −Z W Z diag e e Z W Zl l l l l l l l1 1 .
AH (d)
In AH(d), the proposed instrument is )( 3,2, −− − titi yy instead of 2, −tiy . Continuing
with the notations above, let
vec y y y y yit d N T NT(~ ) [~ , , ~ , , ~ , ~ ]= ′13 3 1Λ Λ Λ
]~,~,,~,,~[)~( 1,1,12121, ′= −−− TNTNdti xxxxxvec ΛΛΛ
vec y y y y yi t d N T N T(~ ) [~ , , ~ , , ~ , ~ ], , ,− − −= ′1 12 2 1 1 1Λ Λ Λ

22
vec y y y y yi t d N T N T(~ ) [~ , , ~ , , ~ , ~ ], , ,− − −= ′2 11 1 1 2 2Λ Λ Λ , and
vec y y y y yi t d N T N T(~ ) [~ , , ~ , , ~ , ~ ], , ,− − −= ′3 10 0 1 3 3Λ Λ Λ .
Define ])~())~()~([(and],)~()~([ 1,3,2,1,1, ltidtidtiddtidtid xvecyvecyvecZxvecyvecW −−−−− −== .
Then the AH(d) estimator of γ is given by
∃ ( ) (~ )γ= ′ ′−Z W Z vec yd d d it d1 .
The asymptotic standard errors under the assumption of homoskedasticity are obtained from
Var s Z W Z Z W Zd d d d d d d( ∃) ( ) ( )γ = ′ ′ ′− −2 1 1 where s e e N Td d d2 2 2= ′ − −( ) / [ ( ) ] with
e vec y Wd it d d= −(~ ) ∃γ. The general heteroskedasticity consistent standard errors are obtained
from ( ) ( ) ( )′ ′ ′ ′− −Z W Z diag e e Z W Zd d d d d d d d1 1 .
It is apparent from the above details of construction of instrument matrices that if the
total number of available cross-sections is T, and the initial values of the dependent variable
are known or can be estimated, then the numbers of cross-sections actually used by AH(l)
and AH(d) are (T-2) and (T-3) respectively. Thus one cross-section is ‘lost’ when AH(d) is
chosen over AH(l). When the number of available cross-sections is small, this may be an
important issue.
Anderson and Hsiao show that both these IV estimators have desirable asymptotic
properties in the directions of both ∞→N and ∞→T . If itv is normally distributed, then
these estimators are asymptotically equivalent to the ML estimators. Further, these desirable
asymptotic properties of the AH estimators do not depend on the assumptions regarding the
initial values of ity .
3SLS and G3SLS
Dynamic panel data models can be viewed as a simultaneous system of T equations
with equations distinguished by t. Thus, conventional simultaneous equations estimators can
be applied to the model, and Chamberlain (1982, 1983) suggests use of a generalized
version of 3SLS. Like Anderson-Hsiao estimators, simultaneous equations estimators also
23
begin by first differencing the model to eliminate the individual effect term iµ . The system
therefore looks as follows.
)()()( 1,2,1,2,1,1, −−−−−− −+−+−=− TiiTTiTiTiTiTiiT vvxxyyyy βα Μ )()()( 12010112 iiiiiiii vvxxyyyy −+−+−=− βα
However, unlike AH and Arellano estimators, simultaneous equations estimators use only
itx ’s as instruments. If observations on 0iy ’s are not available, then the system may be
completed by adding a specification of 0iy in terms of itx ’s as follows.
iTiTii xxy υφφφ ++++= − 1,0100 Λ
3SLS estimation can proceed the usual way with the weighting variance-covariance
matrix estimated from the residuals from initial 2SLS estimation. For generalized 3SLS, the
required weighting matrix is given by E v v x xi i i i( )0 0′⊗ ′ , where 0iv ’s are residuals obtained
using true values of the parameters. In actual implementation, this is approximated by its
sample analog N v v x xi i i ii
N−
=′⊗ ′∑1
1( ∃∃ ) , where iv ’s are residuals from initial 2SLS or 3SLS
estimation. Thus, G3SLS estimator makes a heteroskedasticity correction to the
conventional 3SLS estimator.
Minimum Distance (Chamberlain)
Most of the dynamic panel data estimators begin by eliminating iµ through first
differencing the model. In this regard, MD estimator is distinctive because instead of
eliminating or ignoring, it tries to specify iµ . This allows MD estimator to work with the
model in its level form.
One simple specification of iµ is that suggested by Mundlak (1971), whereby iµ is
taken to be a linear function of ix , the mean of the exogenous variable for individual i. The
purpose of Mundlak’s specification was however to show that under this specification of iµ ,

24
the GLS estimator under random effects assumption becomes equivalent to the LSDV
estimator under fixed effects assumption.
Noting that Mundlak’s suggested specification is overly restrictive, Chamberlain
suggests a more general specification whereby iµ depends linearly on itx for all time
periods for individual i with varying coefficients. According to this specification,
iTiTiii xxx ωλλλλµ +++++= − 1,12010 Κ ,
with iw being the uncorrelated error term. If the initial values, 0iy ’s, are not available, a
similar specification, as the following, can be used for these as well.
iTiTiii xxxy υφφφφ +++++= − 1,120100 Λ
The procedure starts by recursive substitution for the lagged dependent variable, 1, −tiy . With
T = 5, as is the case with the concrete problem studied in this paper, this results into the
following system of equations:
1001 vyxy +++= µαβ)()( 120
2102 vvyxxy ααµµαβαβ ++++++=
)()( 12
232
03
2102
3 vvvyxxxy ααµααµµαβαββα +++++++++=
)(
)(
13
22
34
320
4321
20
34
vvvv
yxxxxy
αααµαµααµµαβαββαβα
++++++++++++=
)()( 14
23
32
45432
05
4322
13
04
5
vvvvv
yxxxxxy
ααααµαµαµααµµαβαββαβαβα
+++++++++++++++=
In matrix form, this system of equations may be expressed as follows:
25
+
+++++++++
++
+
=
5
4
3
2
1
432
32
2
0
5
4
3
2
4
3
2
1
0
23
2
4
3
2
5
4
3
2
1
1
11
11
0000
000000
uuuuu
y
xxxxx
yyyyy
µ
ααααααααα
α
ααααα
βαββ
βααβ
βαβα
βαβα
βαββαβαβ
β
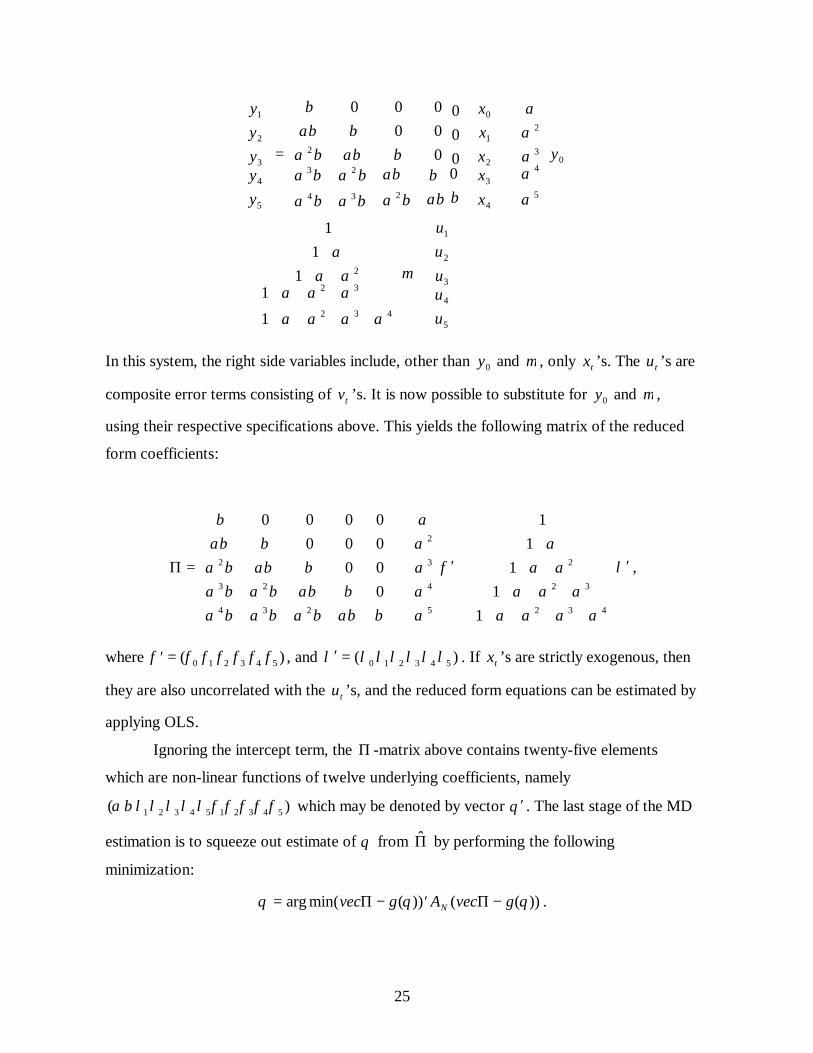
In this system, the right side variables include, other than 0y and µ , only tx ’s. The tu ’s are
composite error terms consisting of tv ’s. It is now possible to substitute for 0y and µ ,
using their respective specifications above. This yields the following matrix of the reduced
form coefficients:
λ
ααααααα
ααα
φ
ααααα
βαββαβαβαβαββαβα
βαββαβαβ
β
′
+++++++
+++
+′
+
=Π
432
32
2
5
4
3
2
234
23
2
11
11
1
0000000000
,
where ′=φ φ φφ φ φ φ( )0 1 2 3 4 5 , and )( 543210 λλλλλλλ =′ . If tx ’s are strictly exogenous, then
they are also uncorrelated with the tu ’s, and the reduced form equations can be estimated by
applying OLS.
Ignoring the intercept term, the Π -matrix above contains twenty-five elements
which are non-linear functions of twelve underlying coefficients, namely
)( 5432154321 φφφφφλλλλλβα which may be denoted by vector θ′. The last stage of the MD
estimation is to squeeze out estimate of θ from Π by performing the following
minimization:
∃ arg min( ∃ ( )) ( ∃ ( ))θ θ θ= − ′ −vec g A vec gNΠ Π .

26
Here )(θg is the vector-valued function mapping the elements of θ into )(Πvec .
Chamberlain shows that the optimal choice for the weighting matrix 1−NA is the inverse of
Ω Π Π Φ Φ= − − ′⊗ ′− −E y x y x x xi i i i x i i x[( )( ) ( ) ]0 0 1 1 ,
where 0Π is the matrix of true coefficients, and Φ x i iE x x= ′( ) . It may be noted that Ω is a
heteroskedasticity consistent weighting matrix. In actual implementation, it is replaced by its
consistent sample analog
∃ [( ∃ )( ∃ ) ( ) ]Ω Π Π= − − ′⊗ ′− − −∑N y x y x S x x Si ii
N
i i x i i x1 1 1 ,
where S x x Nx i ii
N
= ′=∑ /
1. Minimization can be conducted through an iterative routine. In the
current study, the modified Gauss-Newton algorithm was used for the purpose. Note that if
0iy ’s are known then the φ’s do not appear in the system, and the dimensions of the
estimation problem decreases.
AGMM1 and AGMM2
Extending Anderson-Hsiao’s idea, Arellano proposes using as instruments all further
lagged values of ity that qualify as instruments in view of serial uncorrelatedness of itv . The
number of instruments then differs depending on the time period for which the equation is
considered. Arellano uses the GMM framework to adopt a multi-equation approach and use
all the qualified instruments for each equation. The resulting block diagonal matrix of
instruments, iZ , can be seen as follows:
−
−−−
=
−−− 2,1,2,2
23
12
01
10
210
10
0
|
|00|00|00
00
0000000000
0000
00000000
TiTiTii
ii
ii
ii
ii
iii
ii
i
i
xxyy
xxxxxx
yy
yyyyy
y
ZΜΜ
ΛΟΜΛΛΛ
ΜΜΜΜΜΜΜΜ

27
Let v denote the 1)1( ×−TN stacked vector of differenced error term )( 1, −− tiit vv , and Z
denote the mTN ×− )1( stacked matrix of the instrument matrices iZ ’s, where m is the
number of columns in the instrument matrix iZ . Then the GMM estimator is given by
∃ arg min( ) ( )γ= ′ ′v Z A Z vN ,
where NA is an appropriate weighting matrix. If y denotes the stacked vector )( 1, −− tiit yy ,
and W denotes the stacked matrix )]()[( 2,1,2,1, −−−− −− titititi xxyy , then the formula for the
GMM estimator from the above minimization is given by
∃ ( )γ= ′ ′ ′ ′−W ZA Z W W ZA Z yN N1 .
The one-step GMM estimator (AGMM1) is obtained by setting A N Z HZN i ii
= ′− −∑( )1 1 ,
where H is an arbitrary square matrix of dimension (T-2).8 In AGMM2, the weighting
matrix NA is replaced by ∃ ( ∃∃ )V N Z v v ZN ii
i i i11 1= ′ ′− −∑ , where iv are residuals from AGMM1
estimation. Thus AGMM2 introduces heteroskedasticity correction to the weighting matrix.
The general heteroskedasticity consistent standard errors of the estimates are obtained from
( ∃ )′ ′ −W ZV Z WN1 , where NV is estimated from the corresponding residuals. The standard
errors for the AGMM1 estiamtes under the assumption of homoskedasticity are given by
( ) ( ∃ )( )′ ′ ′ ′ ′ ′− − −W ZA Z W W ZA V A Z W W ZA Z WN N N N N1
11 1 , where 1NV is estimated using residuals
from AGMM1 estimation.
8 Arellano suggests a H which has 2’s in the main diagonal and –1 in the first sub-diagonals and zeroselsewhere. Note that (T-2), the dimension of this matrix, is the number of time periods for which the equationcan be estimated.
28
Appendix
Tables Showing Details of the Monte Carlo Distributions
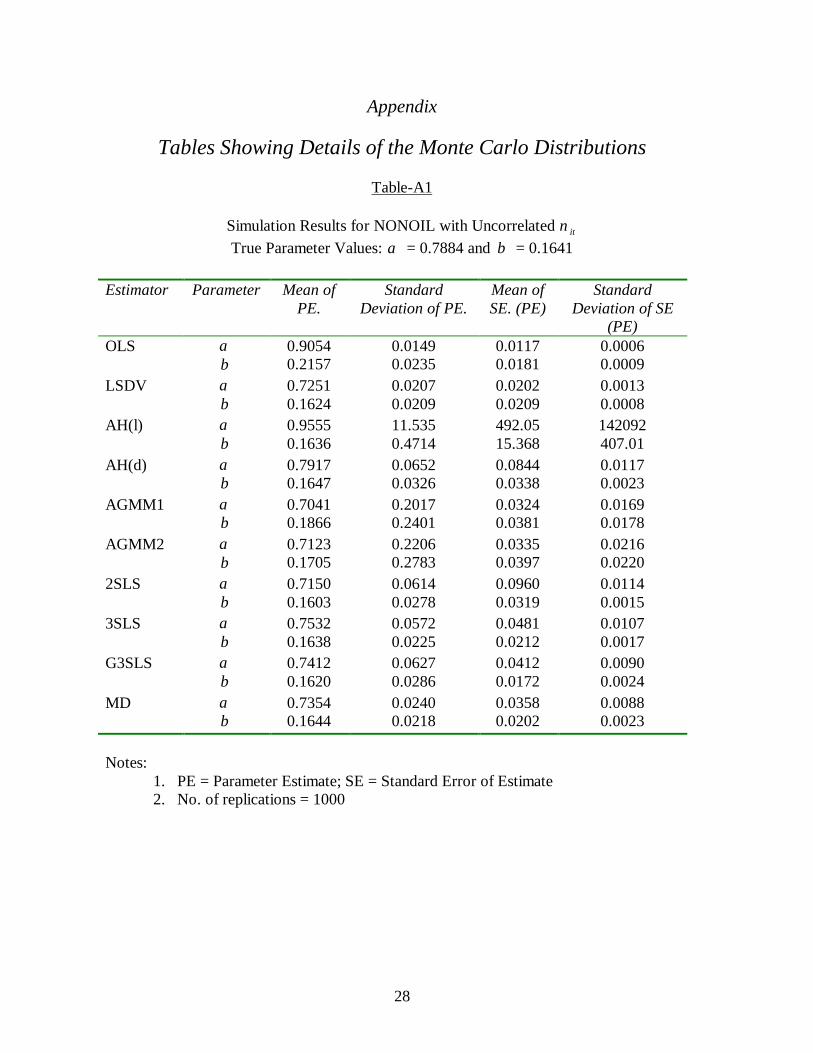
Table-A1
Simulation Results for NONOIL with Uncorrelated itνTrue Parameter Values: α = 0.7884 and β = 0.1641
Estimator Parameter Mean ofPE.
StandardDeviation of PE.
Mean ofSE. (PE)
StandardDeviation of SE
(PE)OLS α
β0.90540.2157
0.01490.0235
0.01170.0181
0.00060.0009
LSDV αβ
0.72510.1624
0.02070.0209
0.02020.0209
0.00130.0008
AH(l) αβ
0.95550.1636
11.5350.4714
492.0515.368
142092407.01
AH(d) αβ
0.79170.1647
0.06520.0326
0.08440.0338
0.01170.0023
AGMM1 αβ
0.70410.1866
0.20170.2401
0.03240.0381
0.01690.0178
AGMM2 αβ
0.71230.1705
0.22060.2783
0.03350.0397
0.02160.0220
2SLS αβ
0.71500.1603
0.06140.0278
0.09600.0319
0.01140.0015
3SLS αβ
0.75320.1638
0.05720.0225
0.04810.0212
0.01070.0017
G3SLS αβ
0.74120.1620
0.06270.0286
0.04120.0172
0.00900.0024
MD αβ
0.73540.1644
0.02400.0218
0.03580.0202
0.00880.0023
Notes:1. PE = Parameter Estimate; SE = Standard Error of Estimate2. No. of replications = 1000

29
Table-A2
Simulation Results for INTER with Uncorrelated itνTrue Parameter Values: α = 0.7925 and β = 0.1732
Estimator Parameter Mean ofPE.
StandardDeviation of PE.
Mean ofSE. (PE)
StandardDeviation of SE
(PE)OLS α
β0.91310.1936
0.01610.0253
0.01140.0184
0.00070.0019
LSDV αβ
0.72620.1741
0.02450.0215
0.02310.0215
0.00170.0009
AH(l) αβ
0.20010.1405
10.5760.4778
492.0410.086
7704.5167.80
AH(d) αβ
0.79420.1721
0.04280.0351
0.05840.0356
0.00600.0023
AGMM1 αβ
0.44060.1603
0.37410.2560
0.05680.0340
0.03410.0169
AGMM2 αβ
0.41790.1785
0.50810.3251
0.06500.0382
0.05810.0325
2SLS αβ
0.76800.1778
0.03240.0334
0.05250.0346
0.00420.0016
3SLS αβ
0.74640.1766
0.06060.0283
0.05320.0217
0.00980.0022
G3SLS αβ
0.72690.1766
0.06770.0307
0.04250.0165
0.00950.0030
MD αβ
0.73800.1749
0.02470.0217
0.03180.0189
0.00910.0027
Notes:1. PE = Parameter Estimate; SE = Standard Error of Estimate2. No. of replications = 1000

30
Table-A3
Simulation Results for OECD with Uncorrelated itνTrue Parameter Values: α = 0.6294 and β = 0.0954
Estimator Parameter Mean ofPE.
StandardDeviation of PE.
Mean ofSE. (PE)
StandardDeviation of SE
(PE)OLS α
β0.76440.1908
0.03770.0587
0.02230.0350
0.00280.0045
LSDV αβ
0.61950.0940
0.01930.0382
0.01880.0389
0.00220.0030
AH(l) αβ
0.62810.0927
0.03300.0573
0.05670.0581
0.00930.0052
AH(d) αβ
0.63290.0938
0.04560.0619
0.06730.0648
0.01060.0069
AGMM1 αβ
0.56590.0884
0.14050.2322
0.03580.0455
0.02160.0280
AGMM2 αβ
0.57550.0789
0.19980.2922
0.03990.0510
0.02820.0394
2SLS αβ
0.51100.0946
0.09660.0556
0.20890.1104
0.04960.0094
3SLS αβ
0.54920.0905
0.16010.0639
0.07310.0432
0.03430.0077
G3SLS αβ
0.50440.0818
0.22540.1131
0.02760.0153
0.01790.0071
MD αβ
0.62140.0948
0.01720.0384
0.01140.0184
0.01670.0134
Notes:1. PE = Parameter Estimate; SE = Standard Error of Estimate2. No. of replications = 1000

31
Table-A4
Simulation Results for NONOIL with MA(1) itνTrue Parameter Values: α = 0.7884 and β = 0.1641
Estimator Parameter Mean ofPE.
StandardDeviation of PE.
Mean ofSE. (PE)
StandardDeviation of SE
(PE)OLS α
β0.90380.2167
0.01560.0239
0.01200.0186
0.00060.0009
LSDV αβ
0.72410.1630
0.02410.0251
0.02150.0224
0.00130.0009
AH(l) αβ
0.27830.0918
5.16620.3746
41.2472.3581
184.5514.054
AH(d) αβ
0.67430.1605
0.06360.0328
0.07760.0322
0.00930.0017
AGMM1 αβ
0.70680.1878
0.20110.2481
0.03100.0389
0.01370.0209
AGMM2 αβ
0.70850.1727
0.21640.2783
0.03170.0404
0.01440.0279
2SLS αβ
0.71500.1597
0.06630.0299
0.09900.0329
0.01250.0015
3SLS αβ
0.76210.1638
0.05620.0249
0.05430.0238
0.01030.0018
G3SLS αβ
0.74560.1601
0.06840.0264
0.04610.0189
0.00910.0023
MD αβ
0.73410.1630
0.02800.0253
0.04150.0225
0.00980.0026
Notes:1. 1.PE = Parameter Estimate; SE = Standard Error of Estimate2. No. of replications = 1000

32
Table-A5
Simulation Results for INTER with MA(1) itνTrue Parameter Values: α = 0.7925 and β = 0.1732
Estimator Parameter Mean ofPE.
StandardDeviation of PE.
Mean ofSE. (PE)
StandardDeviation of SE
(PE)OLS α
β0.91290.1935
0.01610.0253
0.01140.0184
0.00070.0019
LSDV αβ
0.71920.1756
0.02450.0215
0.02310.0215
0.00170.0009
AH(l) αβ
0.97030.1717
1.86580.0945
8.76330.4108
24.0201.1130
AH(d) αβ
0.71690.1713
0.08050.0367
0.09810.0360
0.01520.0023
AGMM1 αβ
0.39990.2015
0.39680.2649
0.06350.0417
0.04040.0255
AGMM2 αβ
0.40000.2114
0.54660.3534
0.07340.0479
0.06720.0426
2SLS αβ
0.76790.1767
0.03570.0358
0.05510.0363
0.00450.0018
3SLS αβ
0.72950.1771
0.06170.0268
0.06060.0245
0.01250.0022
G3SLS αβ
0.71280.1770
0.07500.0318
0.04960.0185
0.01200.0028
MD αβ
0.72960.1740
0.02830.0262
0.03790.0215
0.01120.0030
Notes:1. PE = Parameter Estimate; SE = Standard Error of Estimate2. No. of replications = 1000
33
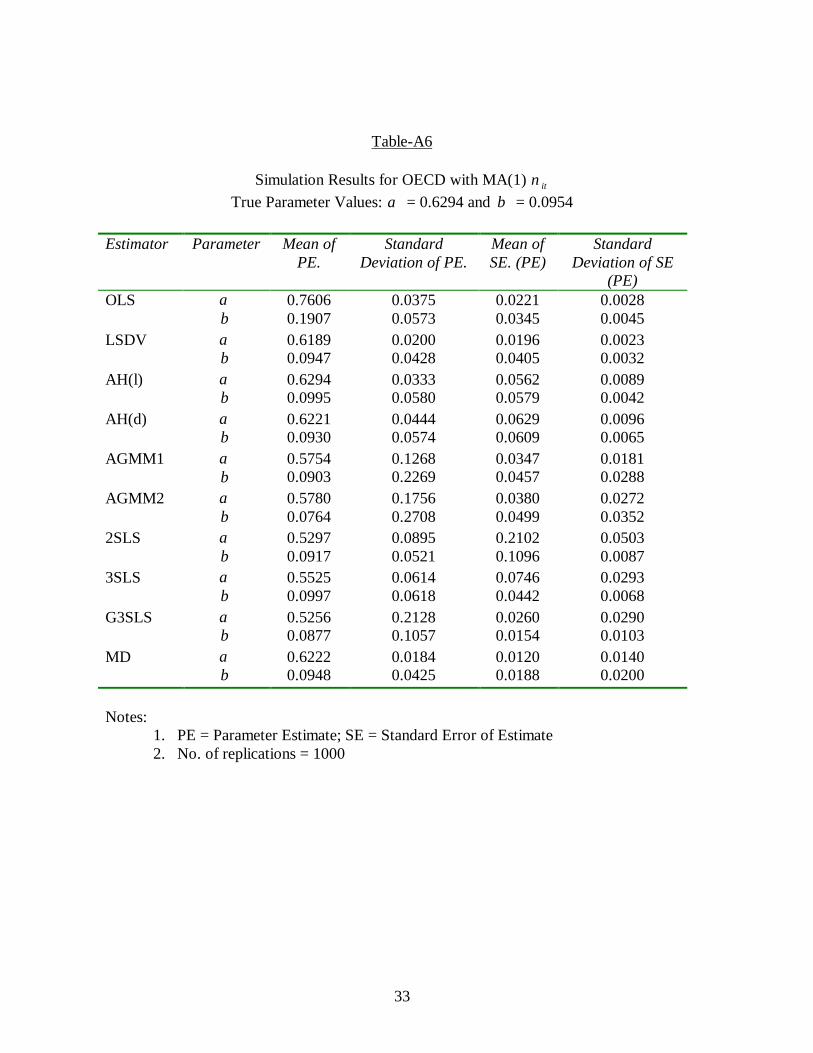
Table-A6
Simulation Results for OECD with MA(1) itνTrue Parameter Values: α = 0.6294 and β = 0.0954
Estimator Parameter Mean ofPE.
StandardDeviation of PE.
Mean ofSE. (PE)
StandardDeviation of SE
(PE)OLS α
β0.76060.1907
0.03750.0573
0.02210.0345
0.00280.0045
LSDV αβ
0.61890.0947
0.02000.0428
0.01960.0405
0.00230.0032
AH(l) αβ
0.62940.0995
0.03330.0580
0.05620.0579
0.00890.0042
AH(d) αβ
0.62210.0930
0.04440.0574
0.06290.0609
0.00960.0065
AGMM1 αβ
0.57540.0903
0.12680.2269
0.03470.0457
0.01810.0288
AGMM2 αβ
0.57800.0764
0.17560.2708
0.03800.0499
0.02720.0352
2SLS αβ
0.52970.0917
0.08950.0521
0.21020.1096
0.05030.0087
3SLS αβ
0.55250.0997
0.06140.0618
0.07460.0442
0.02930.0068
G3SLS αβ
0.52560.0877
0.21280.1057
0.02600.0154
0.02900.0103
MD αβ
0.62220.0948
0.01840.0425
0.01200.0188
0.01400.0200
Notes:1. PE = Parameter Estimate; SE = Standard Error of Estimate2. No. of replications = 1000
34
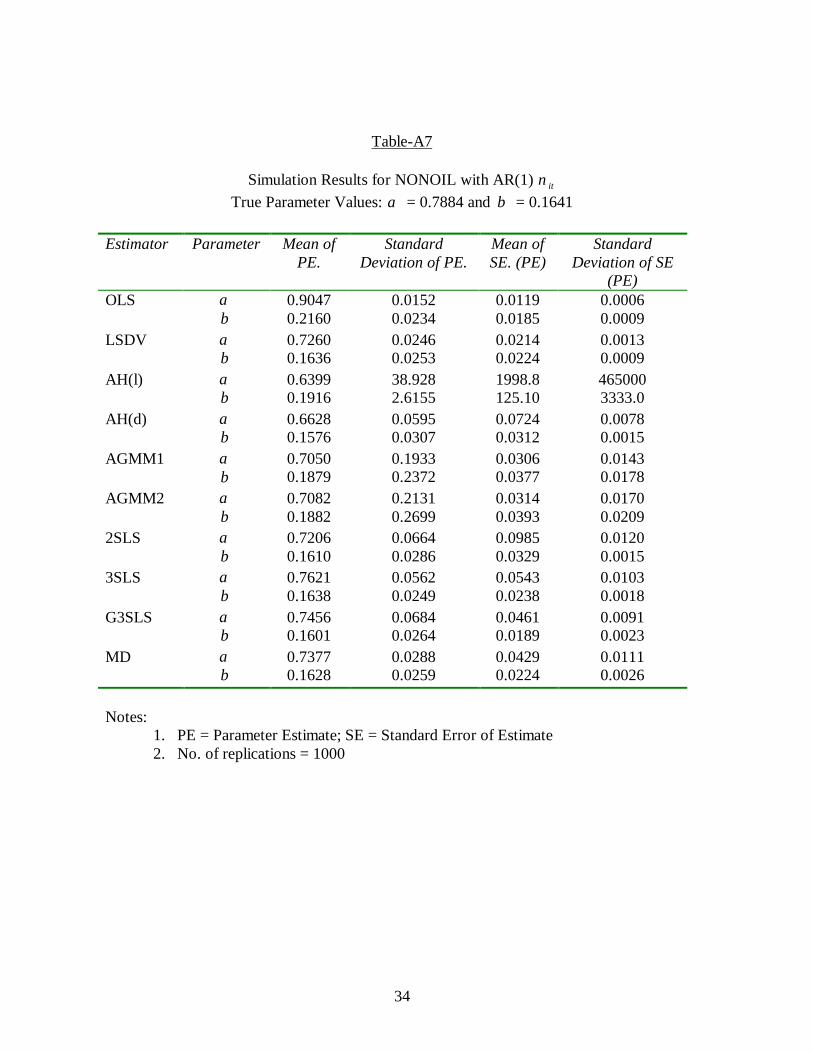
Table-A7
Simulation Results for NONOIL with AR(1) itνTrue Parameter Values: α = 0.7884 and β = 0.1641
Estimator Parameter Mean ofPE.
StandardDeviation of PE.
Mean ofSE. (PE)
StandardDeviation of SE
(PE)OLS α
β0.90470.2160
0.01520.0234
0.01190.0185
0.00060.0009
LSDV αβ
0.72600.1636
0.02460.0253
0.02140.0224
0.00130.0009
AH(l) αβ
0.63990.1916
38.9282.6155
1998.8125.10
4650003333.0
AH(d) αβ
0.66280.1576
0.05950.0307
0.07240.0312
0.00780.0015
AGMM1 αβ
0.70500.1879
0.19330.2372
0.03060.0377
0.01430.0178
AGMM2 αβ
0.70820.1882
0.21310.2699
0.03140.0393
0.01700.0209
2SLS αβ
0.72060.1610
0.06640.0286
0.09850.0329
0.01200.0015
3SLS αβ
0.76210.1638
0.05620.0249
0.05430.0238
0.01030.0018
G3SLS αβ
0.74560.1601
0.06840.0264
0.04610.0189
0.00910.0023
MD αβ
0.73770.1628
0.02880.0259
0.04290.0224
0.01110.0026
Notes:1. PE = Parameter Estimate; SE = Standard Error of Estimate2. No. of replications = 1000
35
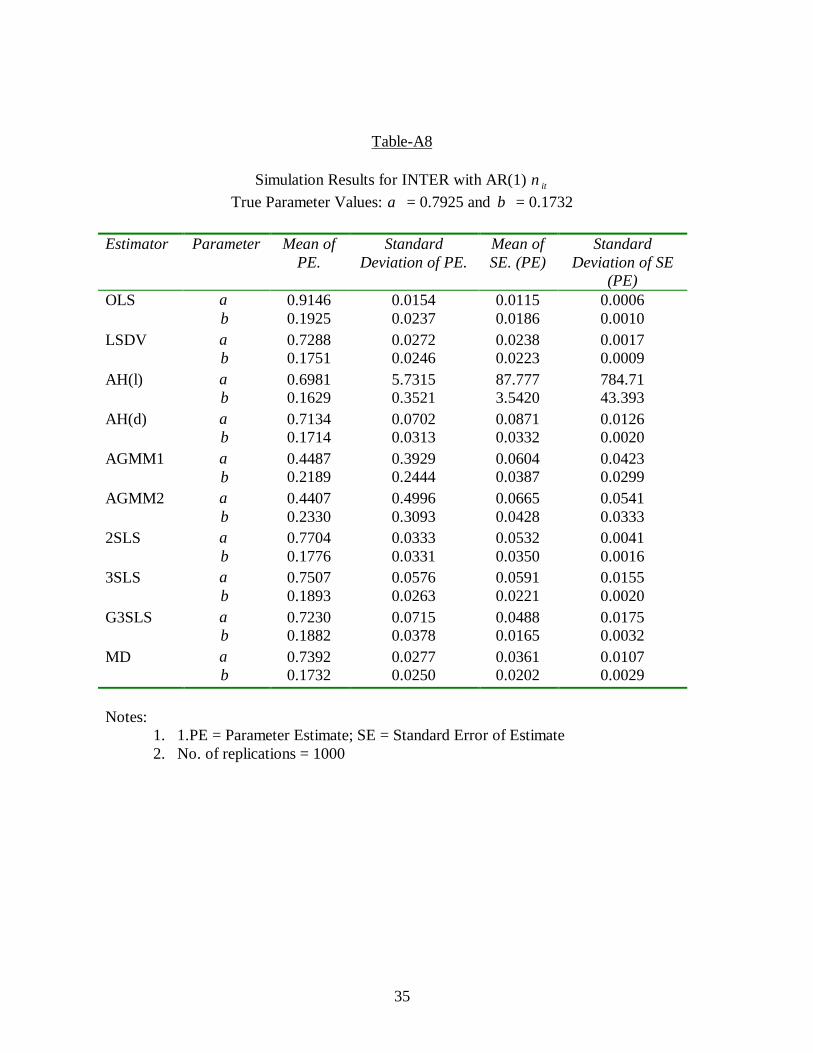
Table-A8
Simulation Results for INTER with AR(1) itνTrue Parameter Values: α = 0.7925 and β = 0.1732
Estimator Parameter Mean ofPE.
StandardDeviation of PE.
Mean ofSE. (PE)
StandardDeviation of SE
(PE)OLS α
β0.91460.1925
0.01540.0237
0.01150.0186
0.00060.0010
LSDV αβ
0.72880.1751
0.02720.0246
0.02380.0223
0.00170.0009
AH(l) αβ
0.69810.1629
5.73150.3521
87.7773.5420
784.7143.393
AH(d) αβ
0.71340.1714
0.07020.0313
0.08710.0332
0.01260.0020
AGMM1 αβ
0.44870.2189
0.39290.2444
0.06040.0387
0.04230.0299
AGMM2 αβ
0.44070.2330
0.49960.3093
0.06650.0428
0.05410.0333
2SLS αβ
0.77040.1776
0.03330.0331
0.05320.0350
0.00410.0016
3SLS αβ
0.75070.1893
0.05760.0263
0.05910.0221
0.01550.0020
G3SLS αβ
0.72300.1882
0.07150.0378
0.04880.0165
0.01750.0032
MD αβ
0.73920.1732
0.02770.0250
0.03610.0202
0.01070.0029
Notes:1. 1.PE = Parameter Estimate; SE = Standard Error of Estimate2. No. of replications = 1000

36
Table-A9
Simulation Results for OECD with AR(1) itνTrue Parameter Values: α = 0.6294 and β = 0.0954
Estimator Parameter Mean ofPE.
StandardDeviation of PE.
Mean ofSE. (PE)
StandardDeviation of SE
(PE)OLS α
β0.76290.1913
0.03780.0553
0.02210.0346
0.00280.0044
LSDV αβ
0.62080.0934
0.02080.0417
0.01920.0400
0.00220.0032
AH(l) αβ
0.63190.0965
0.03370.0586
0.05550.0571
0.00870.0049
AH(d) αβ
0.61920.0950
0.04590.0593
0.06490.0630
0.00950.0061
AGMM1 αβ
0.57700.0929
0.13990.2161
0.03500.0453
0.02000.0288
AGMM2 αβ
0.57620.0968
0.18770.2710
0.03780.0495
0.02510.0384
2SLS αβ
0.52150.0917
0.09640.0551
0.21360.1105
0.05250.0090
3SLS αβ
0.55290.0869
0.12750.0782
0.07780.0446
0.03370.0061
G3SLS αβ
0.54490.0973
0.16430.1427
0.02740.0165
0.01570.0079
MD αβ
0.62190.0966
0.01850.0435
0.01200.0191
0.02380.0161
Notes:1. PE = Parameter Estimate; SE = Standard Error of Estimate2. No. of replications = 1000

37
References
Amemiya, T. (1967), “A Note on the Estimation of Balestra-Nerlove Models,” Technical
Report No. 4, Institute of Mathematical Studies in Social Sciences, Stanford
University.
Amemiya, T. (1971), “Estimation of the Variance in a Variance-Component Model,”
International Economic Review, 12:1-13.
Anderson, T. W. and C. Hsiao (1981), “Estimation of Dynamic Models with Error
Components,” Journal of American Statistical Association, 76:598-606.
Anderson, T. W. and C. Hsiao (1982), “Formulation and Estimation of Dynamic Models
Using Panel Data,” Journal of Econometrics, 18:47-82.
Arellano, M. (1989a), “On the Efficient Estimation of Simultaneous Equations with
Covariance Restrictions,” Journal of Econometrics, 42:247-265.
Arellano, M. (1989b), “An Efficient GLS Estimation of Triangular Models with
Covariance Restrictions,” Journal of Econometrics, 42:267-273.
Arellano, M. and S. Bond (1991), “Some Tests of Specification for Panel Data: Monte
Carlo Evidence and an Application to Employment Equations,” The Review of
Economic Studies, 58:277-297.
Balestra, P. and M. Nerlove (1966), “Pooling Cross-section and Time Series Data in the
Estimation of a Dynamic Model: The Demand of Natural Gas,” Econometrica,
34:585-612.
Bhargava, A. and J. D. Sargan (1983), “Estimating Dynamic Random Effects Models
from Panel Data Covering Short Time Periods,” Econometrica, 51:1635-1659.
38
Chamberlain, G. (1982), “Multivariate Regression Models for Panel Data,” Journal of
Econometrics, 18:5-46.
Chamberlain, G. (1983), “Panel Data,” in Z. Griliches and M. Intrilligator (editors),
Handbook of Econometrics, Vol. II., 1247-1318.
Mankiw, N. G., D. Romer, and D. Weil (1992), “A Contribution to the Empirics of
Growth,” Quarterly Journal of Economics, CVII: 407-437.
Nerlove, M. (1967), “Experimental Evidence on the Estimation of Dynamic Economic
Relations from a Time Series of Cross-sections, Economic Studies Quarterly,
18:42-74.
Nerlove, M. (1971), “Further Evidence on the Estimation of Dynamic Economic
Relations from a Time Series of Cross-sections,” Econometrica, 39:383-396.
Nickel, S. (1979), “Biases in Dynamic Models with Fixed Effects,” Econometrica,
49:1399-1416.
Sevestre, P. and Trognon, A. (1982), “A Note on Autoregressive Error Components
Models,” 8209, Ecole Nationale de la Statistique et de l’Administration
Economique et Unite de Recherche.
Summers, R. and A. Heston (1988), “A New Set of International Comparisons of Real
Product and Price Levels Estimates for 130 Countries, 1950-85,” Review of
Income and Wealth, XXXIV: 1-26.
Summers, R. and A. Heston (1991), “The Penn World Table (Mark 5): An Expanded Set
of International Comparisons, 1950-1988,” Quarterly Journal of Economics,
106: 327-368.

39
Abstract
This paper investigates the small sample properties of dynamic panel data estimators
as applied for estimation of growth convergence equation using Summers-Heston data set.
The Monte Carlo results show that estimates from different estimators do vary. Second,
those dynamic panel estimators which do not use further lagged dependent variable as
instruments perform better than the ones which do. These results together suggest that
investigators using panel estimators should try to check into the possible small sample bias
of their results. (JEL classification: C3, O4)