simplification of force systemskisi.deu.edu.tr/emine.cinar/statics/spring18...
TRANSCRIPT

Simplification of Force Systems =
Resultants
If two force systems are creating the same external
effect on the rigid body they are exerted on, they are said
to be “equivalent”. The resultant of a force system is the
simplest combination that forces can be reduced without
altering the external effect they produce on the body.
Equilibrium of a body is the condition in which the resultant
of all the forces acting on the body is zero. This condition
is studies in Statics.
When the resultant of all forces acting on a body is not
zero, the acceleration of the body is obtained by equating
the force resultant to the product of the mass and
acceleration of the body ( ). This condition is
studied in Dynamics. Thus, the determination of resultants
is basic to both Statics and Dynamics.
For some systems the resultant will only be a force, for
others it will only be a couple, but in general the resultant
will comprise both a force and a couple.
amF
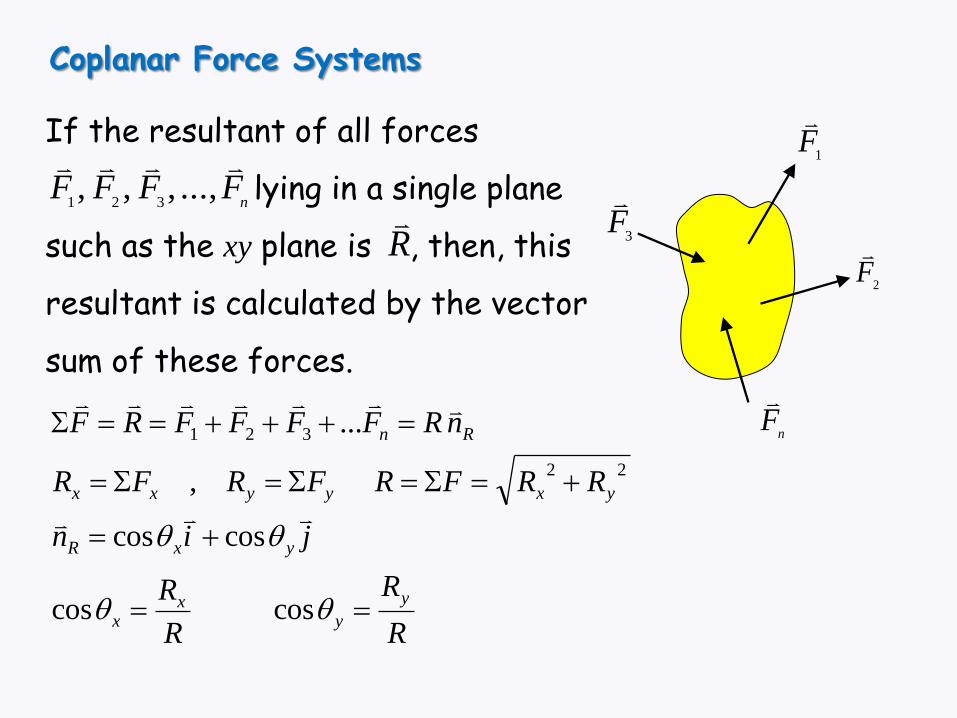
Coplanar Force Systems
If the resultant of all forces
lying in a single plane
such as the xy plane is , then, this
resultant is calculated by the vector
sum of these forces.
nFFFF
..., , , ,321
R
R
R
R
R
jin
RRFRFRFR
nRFFFFRF
y
yx
x
yxR
yxyyxx
Rn
cos cos
coscos
,
...
22
321
2F
1F
3F
nF
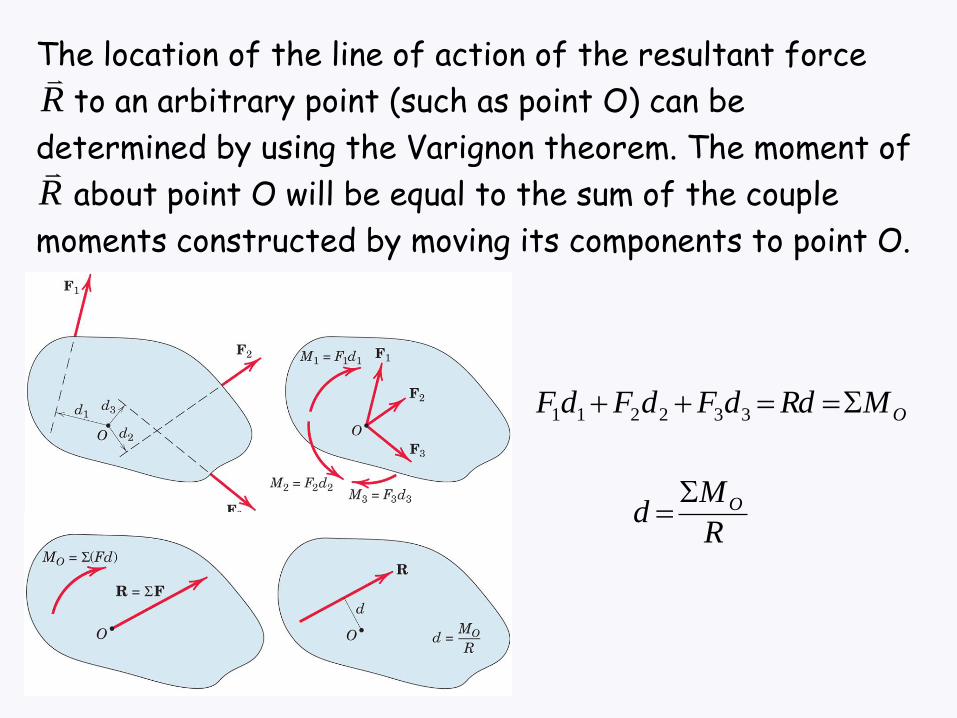
The location of the line of action of the resultant force
to an arbitrary point (such as point O) can be
determined by using the Varignon theorem. The moment of
about point O will be equal to the sum of the couple
moments constructed by moving its components to point O.
R
R
R
Md
MRddFdFdF
O
O
332211
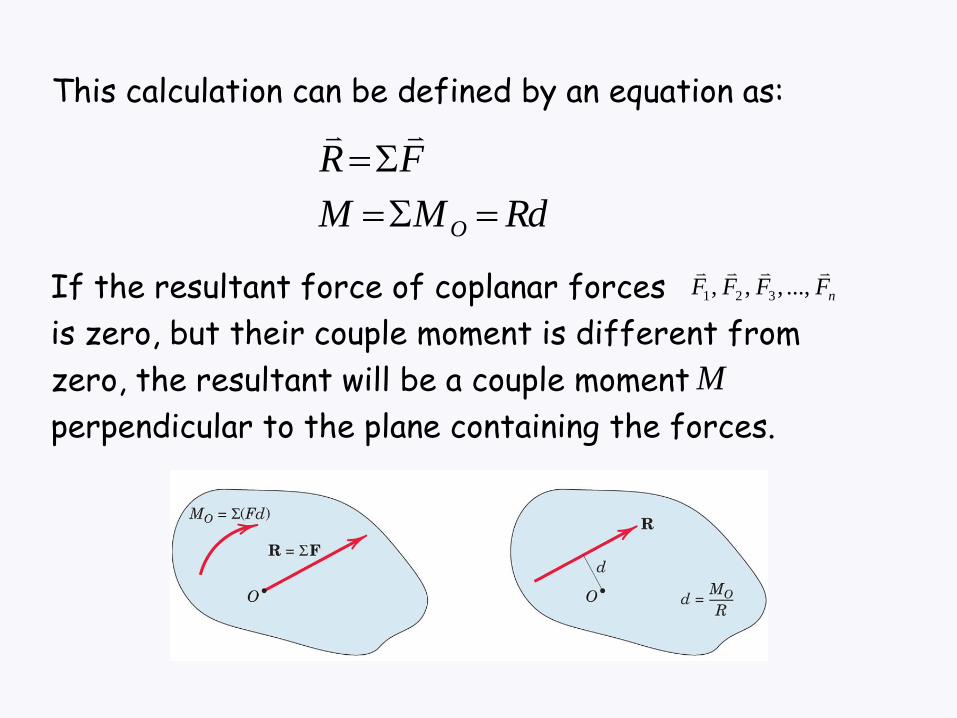
This calculation can be defined by an equation as:
If the resultant force of coplanar forces
is zero, but their couple moment is different from
zero, the resultant will be a couple moment
perpendicular to the plane containing the forces.
RdMM
FR
O
nFFFF
..., , , , 321
M
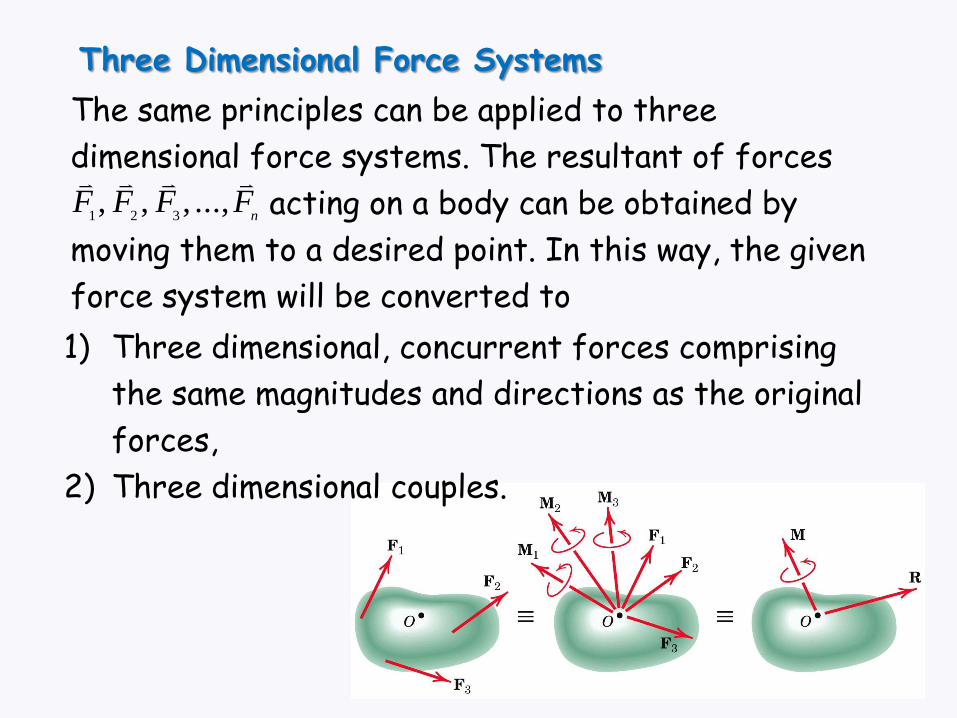
The same principles can be applied to three
dimensional force systems. The resultant of forces
acting on a body can be obtained by
moving them to a desired point. In this way, the given
force system will be converted to
Three Dimensional Force Systems
nFFFF
..., , , ,321
1) Three dimensional, concurrent forces comprising
the same magnitudes and directions as the original
forces,
2) Three dimensional couples.
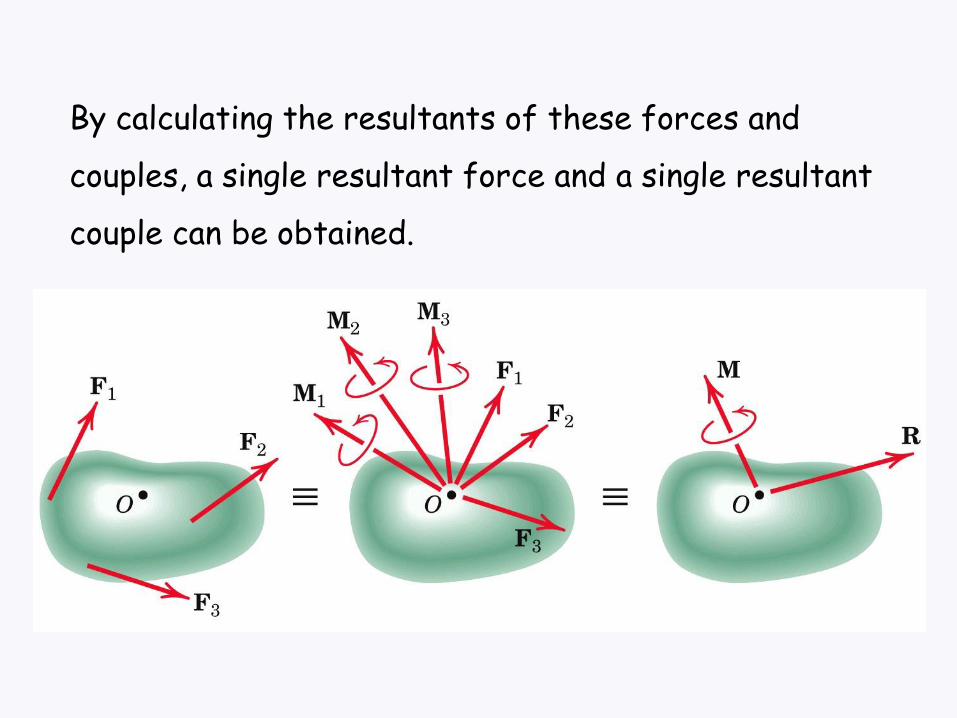
By calculating the resultants of these forces and
couples, a single resultant force and a single resultant
couple can be obtained.
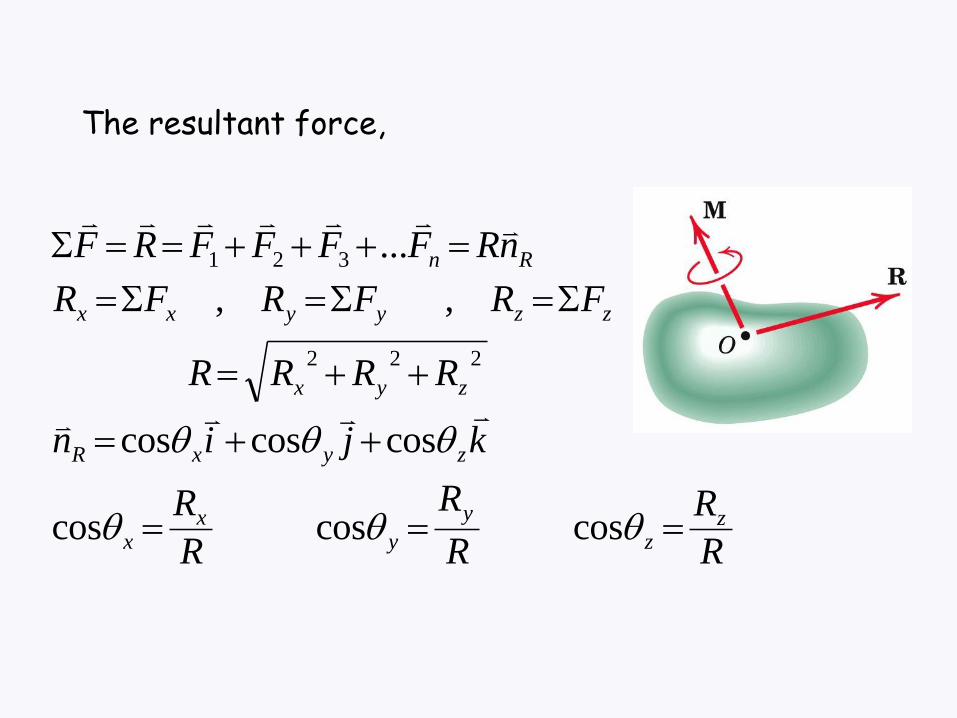
The resultant force,
R
R
R
R
R
R
kjin
RRRR
FRFRFR
nRFFFFRF
zz
y
yx
x
zyxR
zyx
zzyyxx
Rn
cos cos cos
coscoscos
, ,
...
222
321

The resultant couple moment,
M
M
M
M
M
M
kjin
MMMM
FrMFrMFrM
nMMMMMM
zz
y
yx
x
zyxM
zyx
zyyxx
Mn
cos cos cos
coscoscos
, ,
...
222
z
321
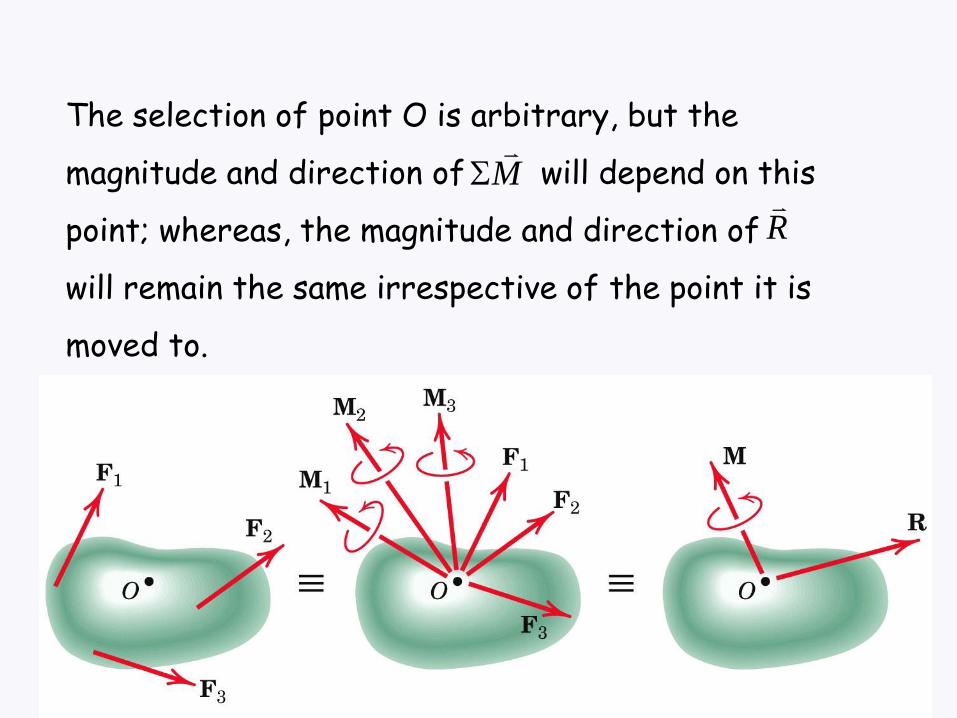
The selection of point O is arbitrary, but the
magnitude and direction of will depend on this
point; whereas, the magnitude and direction of
will remain the same irrespective of the point it is
moved to.
M
R
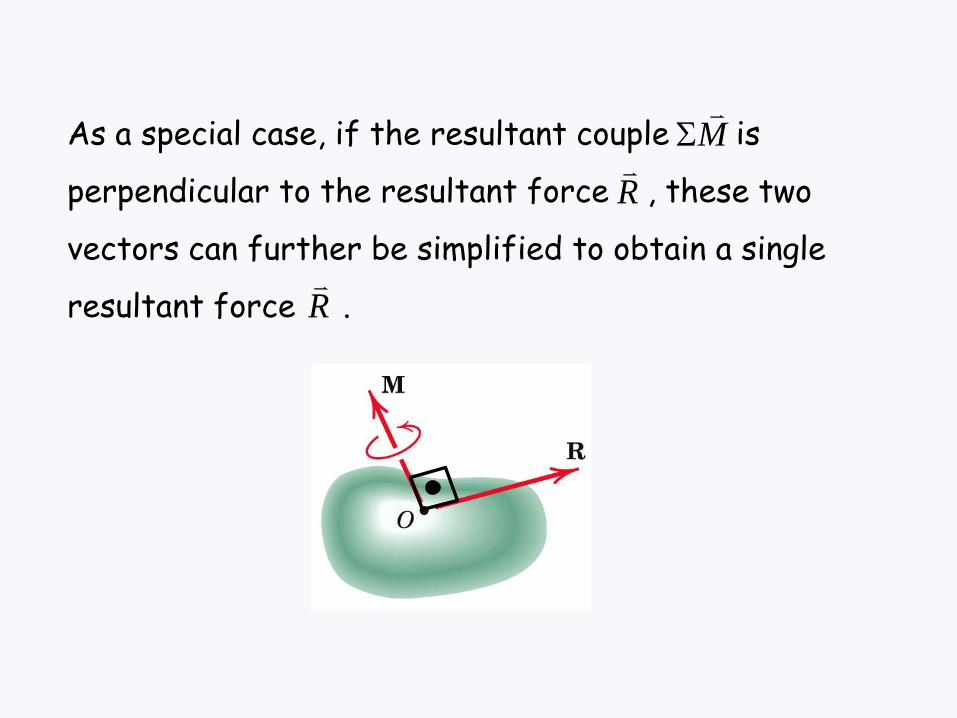
As a special case, if the resultant couple is
perpendicular to the resultant force , these two
vectors can further be simplified to obtain a single
resultant force .
M
R
R
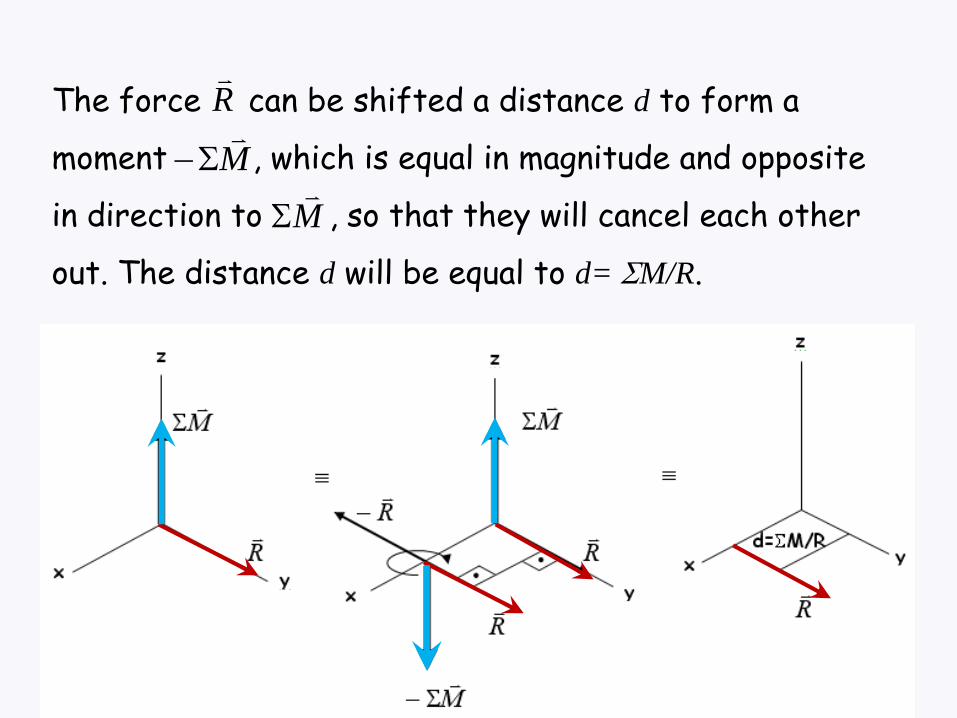
The force can be shifted a distance d to form a
moment , which is equal in magnitude and opposite
in direction to , so that they will cancel each other
out. The distance d will be equal to d= M/R.
M
R
M
Wrench Resultants
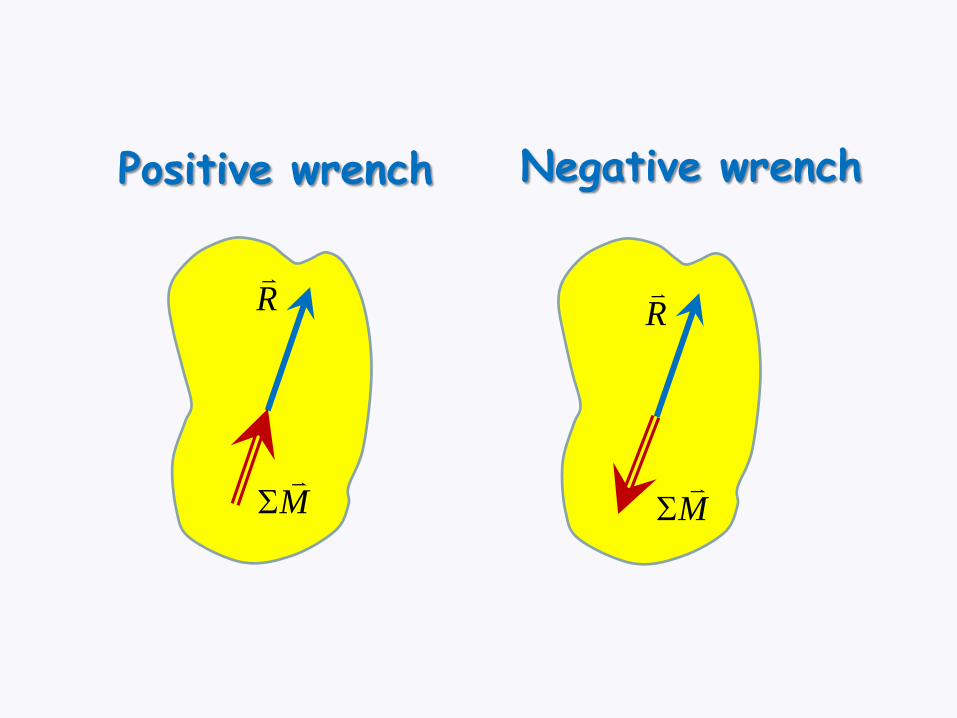
When the resultant couple vector is parallel to
the resultant force , the resultant is called a
“wrench”. The wrench is the simplest form in which
the resultant of a general force system may be
expressed.
M
R
By definition, a wrench is positive if the couple and
force vectors point in the same direction, and negative
if they point in opposite directions. A common example
of a positive wrench is found with the application of a
screwdriver. All force systems can be reduced to a
wrench acting at a particular line of action.
M
R
M
R
Positive wrench Negative wrench
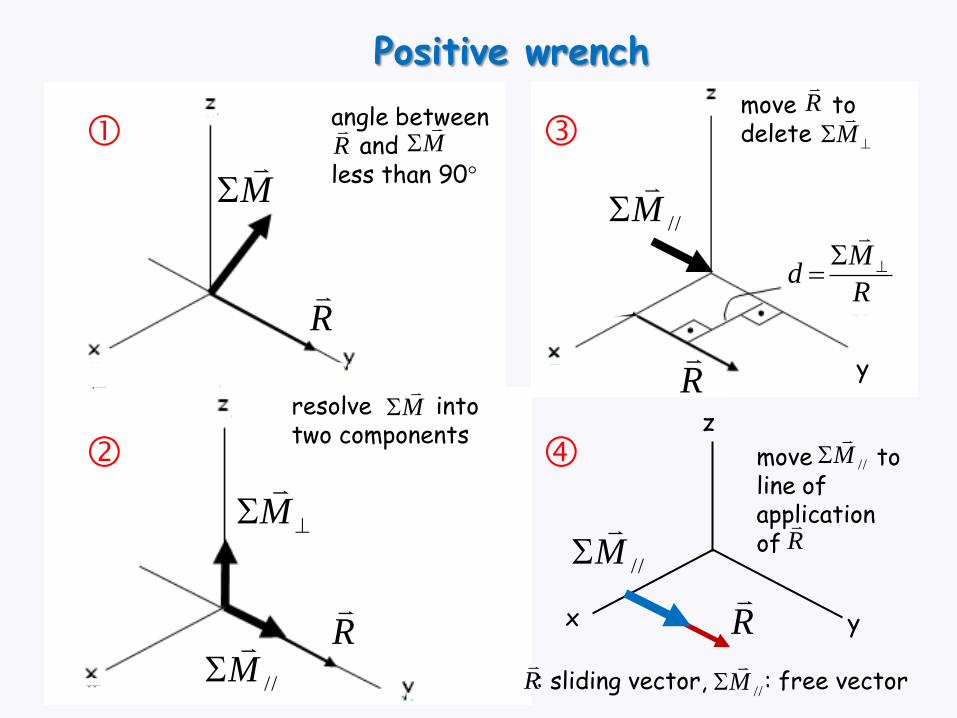
Positive wrench
//M
R
x y
z
y
//M
//M
M
R
Md
R
R
R
resolve into two components
M
move to delete
R
M
move to line of application of R
//M
angle between and less than 90° R
M
M
: sliding vector, : free vector R
//M
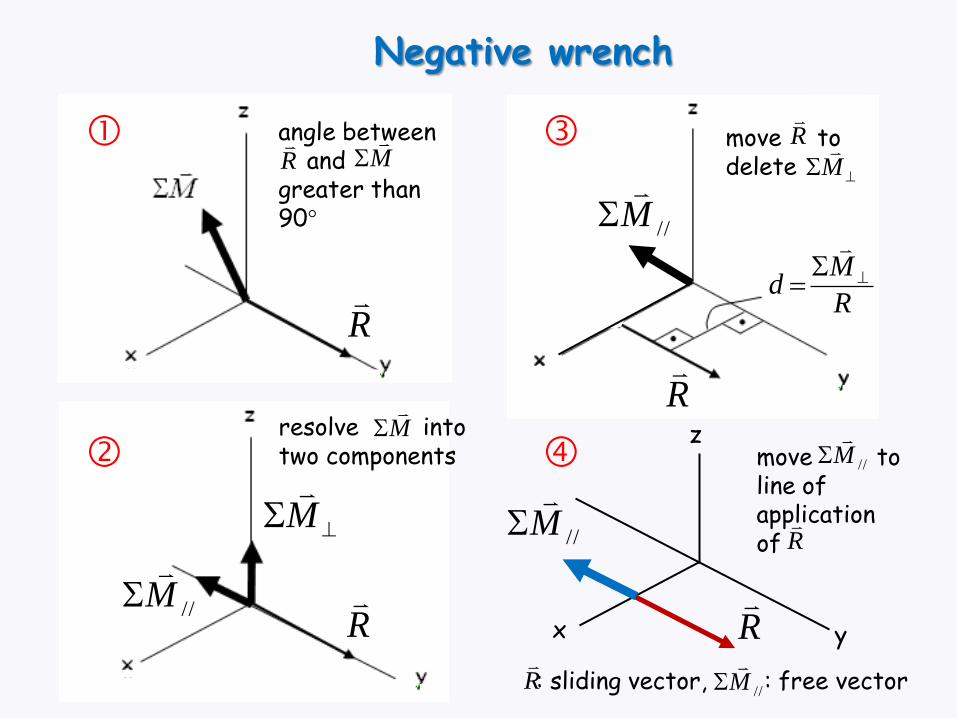
Negative wrench
//M
R
x y
z
//M
//M
M
R
Md
R
R
R
//M
resolve into two components
M
move to delete
R
M
move to line of application of R
//M
angle between and greater than 90°
R
M
: sliding vector, : free vector R
//M