simatic s7 step 7 - · pdf filesimatic s7 – step7 ∙ praxistraining 3 kapitel 2.5.2...
TRANSCRIPT
Ludwig Wenzl
SIMATIC S7® – STEP 7
®
PRAXISTRAINING
Lösungen
Simatic S7 – Step7 ∙ Praxistraining 2
Kapitel 1.3 Seite 8
Aufgabe 1:
a) Produktionsprozesse/Herstellung von Teilen in mehreren Arbeitsschritten
b) Transportvorgänge mit einem festgelegten Weg
c) Reinigungsvorgänge (Waschmaschine, Geschirrspülmaschine)
Aufgabe 2:
a) unterschiedliche Beschaffenheit des Werkstoffs (weich-hart)
b) nachlassende Schärfe der Bohrerschneiden
c) Extremfall: Bruch des Bohrers
Aufgabe 3:
Im Gegensatz zu Verbindungsprogrammierten Steuerungen (VPS) können die Akto-ren (z. B. Schütze) bei SPS-Anwendungen durch speichernde Softwarebefehle („Speicherung“) dauerhaft auf Ein-Zustand geschaltet werden.
Aufgabe 4:
a) Sensoren: Tastschalter, Rastschalter, induktive Sensoren, kapazitive Sensoren, Grenztaster, Lichtschranken …
b) Aktoren:
– elektromagnetische Schütze, steuern Verbraucher an
– pneumatische oder hydraulische Ventile die dann wiederum Zylinder ansteuern
– Stellmotore …
Aufgabe 5:
SPS-Geräte bieten die Möglichkeit, entweder
– direkt am Gerät entsprechende Anzeigegeräte (Monitore, Panels) anzuschließen oder
– sie lassen sich per Buskabel an andere Systeme (z. B. Rechnernetze) ankoppeln, die dann die Visualisierung (= Anzeige) übernehmen. Zudem lassen sich die an-gezeigten Betriebsdaten dann auch speichern, weiterleiten usw.
Derartige Möglichkeiten bieten konventionelle Steuerung (VPS) kaum, meist ist hier die Anzeige auf einzelne Lämpchen beschränkt.
3 Simatic S7 – Step7 ∙ Praxistraining
Kapitel 2.5.2 Seite 21
Aufgabe 1:
– Rack 300 = Systemschiene
– PS 300 = Power-Supply, Netzteil
– CPU 315 = Zentralbaugruppe
– DI 300 = Digitaleingabebaugruppe SM 321 (Signal-Modul)
– DO 300 = Digitalausgabebaugruppe SM 322 (Signal-Modul)
Aufgabe 2:
Die PS-300 Baugruppen geben 24 V DC (Gleichspannung) an die CPU-Baugruppe ab. Diese Spannung ist deren Versorgungsspannung.
Aufgabe 3:
Die Zentralbaugruppe arbeitet das Anwenderprogramm ab, das in ihrem Programm-speicher abgelegt ist. Deshalb spricht man ja von „Speicherprogrammierbarer Steue-rung“.
Daneben kommuniziert sie über den internen Bus mit den anderen SPS-Komponen-ten. Beispielsweise liest sie die Eingangssignale der DI-Baugruppen ein und steuert die Ausgänge der DO-Baugruppen.
Funktionselemente:
– Prozessor
– Speicher mit Betriebssystem und Anwenderprogr.
– interner Bus zwischen CPU, Speichern und anderen Baugruppen der SPS
– Interface (Schnittstelle) zur Kommunikation mit dem PC/PG (= Programmiergerät)
Bedien- und Anzeigeelemente:
– Betriebsartenschalter (RUN, STOP, Urlöschen)
– Status- und Kontroll-LEDs
– MPI-Schnittstelle, evtl. Profibus/Profinet-Anschl.
– Aufnahmeschacht für Memory-Card
Aufgabe 4:
Das Programm wird nach Spannungswiederkehr aus dem Ladespeicher, also der Memory-Card (= EEPROM, nicht-flüchtiger Speicher) wieder in den Arbeitsspeicher (= RAM) geladen. Bei älteren Zentralbaugruppen wird der RAM-Speicher mit Hilfe einer Pufferbatterie vor Datenverlusten geschützt.
Aufgabe 5:
MPI-Schnittstelle (MPI = Multi-Point-Interface). Zwischen PC und Zentralbaugruppe wird eine entsprechende Anschlussleitung mit Pegelanpassung gesteckt. Es gibt auch MPI-Karten für PCs.
Simatic S7 – Step7 ∙ Praxistraining 4
Die Kommunikation ist auch über Profi-Bus oder Profi-Net (= TCPI-basiert) möglich, sofern Zentralbaugruppe und PC/PG über diese Schnittstellen verfügen.
Aufgabe 6:
24 V DC und 120/230 V AC. Letztere Spannung ermöglicht es, dass die Netzspan-nung direkt als Signalspannung (ohne Netzteil) verwendet werden kann. Und zwar sowohl in Europa (230 V) als auch in außereuropäischen Ländern (z. B. USA) mit 120 V Netzspannung.
Aufgabe 7:
In den meisten Fällen werden DO-Signalmodule mit 24 V DC/ 0,5 A eingesetzt. Der maximale Ausgangsstrom von 0,5 A reicht aus, um Motorschütze anzusteuern oder um Meldelampen, Hupen usw. zu betreiben.
Aufgabe 8:
Der Steckplatz 3 ist im Aufbau für die so genannten Anschaltbaugruppen IM36x re-serviert. Diese werden benötigt, wenn große Automatisierungsgeräte mehrzeilig auf-gebaut werden. Der Steckplatz 3 darf nicht für andere Baugruppen verwendet wer-den und bleibt deshalb auch in der Hardwarekonfiguration frei.
Aufgabe 9:
Derzeit ist bei der S7-300 maximal ein vierzeiliger Aufbau (Grundgerät Rack 0 und drei Erweiterungsgeräte Rack 1, 2, 3 möglich.
In jedem Rack sind maximal 8 Signalmodule möglich.
Somit ergeben sich 4 x 8 Module = 32 Baugruppen.
Wenn man für jede verwendete Baugruppe 32 Ein-/Ausgänge nutzt, so ergeben sich insgesamt 32 Baugr. x 32 DI/DO = 1024 DI/DO
Im maximalen Ausbau einer S7-300 sind also 1024 digitale Bitadressen möglich, die – je nach verwendeten Baugruppen – als Digital-Eingänge (DI) oder Digitalausgänge (DO) verwendet werden können.
Allerdings können dann in die SPS keine anderen Baugruppen (z. B. CPs = Kommu-nikationsprozessoren) mehr eingebaut werden, da ja durch die 32 Module alle Steckplätze belegt sind.
Reicht diese große Anzahl von digitalen Adressen immer noch nicht aus, so müssten mehrere SPS-Geräte per Bus miteinander vernetzt werden.
Dies dürfte allein schon deshalb sinnvoll sein, weil das Programm umso größer wird, je mehr Ein-/Ausgänge benutz werden. Umfangreich Programme benötigen erfah-rungsgemäß auch eine längere Programmbearbeitungszeit und die SPS würde evtl. zu langsam arbeiten.
Deshalb macht es Sinn, umfangreiche Steuerungsaufgaben auf mehrere, vernetzte SPS-Geräte aufzuteilen.
Aufgabe 10:
Die Speichermodule heißen Micro-Memory-Cards. Sie sind von der äußeren Form her mit den SD-Karten von Fotoapparaten etc. gleich.

5 Simatic S7 – Step7 ∙ Praxistraining
Es handelt sich um EEPROM-Speicher (Flash-Speicher), die sowohl elektrisch ge-löscht als auch immer wieder neu programmiert werden können.
Da die MMCs eine spezielle Software-Kennung tragen, kann nicht jede handels-übliche SD-Karte für die S7 verwendet werden.
Achtung: Wird eine MMC formatiert, verliert sie ihre spezielle Kennung und wird dann von der S7-CPU nicht mehr erkannt, deshalb die MMC nicht formatieren, son-dern nur neu programmieren!
Aufgabe 11:
Beim Arbeitsspeicher in der CPU-Baugruppe handelt es sich um RAM (Random Ac-cess Memory, wahlfreier Zugriff für Lesen und Schreiben)
Der RAM ist – je nach CPU-Baugruppe – unterschiedlich groß und nicht durch zu-sätzliche Steckmodule erweiterbar. Deshalb sollte bei der Auswahl der CPU-Baugruppe darauf geachtet werden, dass diese ausreichend Speicherplatz bereithält. Andernfalls müsste diese Baugruppe evtl. später ausgetauscht werden, was kosten-intensiv ist.
Simatic S7 – Step7 ∙ Praxistraining 6
Kapitel 3.4 Seite 32
Aufgabe 1:
KOP – Kontaktplan, FUP – Funktionsplan, AWL – Anweisungsliste
Der Programmierer wird die Darstellungsart entweder aufgrund der Kundenanforde-rungen oder – falls ihm die Darstellungsart freigestellt ist – nach der persönlichen Erfahrung wählen.
Einige bestimmte, aufwändige Befehle können nur in AWL dargestellt werden. Des-halb kann es sein, dass einzelne Netzwerke oder komplette Programme in AWL dar-gestellt werden müssen.
Aufgabe 2:
Die AWL (Anweisungsliste) ist die mächtigste Darstellungsart. In ihr gibt es Befehle, die in den grafischen Darstellungsarten KOP und FUP nicht darstellbar sind.
Aufgabe 3: Befehl: O E 2.5
O = Operation, also was soll getan werden (hier den Eingang E 2.5 mit anderen Operanden nach ODER verknüpfen
E = Operandenkennzeichen (hier steht E für Eingang)
2.5 = Adresse des Operanden (Byte 2, Bit 5)
Das Operandenkennzeichen und die Adressen bilden zusammen den Operanden (hier ist der Eingang E 2.5 der Operand).
Aufgabe 4:
Die Drahtbruchsicherheit wird gewährleistet, indem AUS-Befehle von Öffner-Kontakten und EIN-Befehle von Schließer-Kontakten gegeben werden.
Wird die Leitung zwischen AUS-Befehlsgeber und SPS unterbrochen, so erhält die SPS den Signalpegel „0“ und deutet dies als AUS-Befehl. Die Anlage wird selbststä-tig ausgeschaltet und geht damit in einen sicheren Zustand.
Wird die Leitung zwischen EIN-Befehlsgeber und SPS unterbrochen, so erhält die SPS keinen Signalpegel „1“ und schaltet nicht ein. Die Anlage bleibt ausgeschaltet und bleibt damit im sicheren AUS-Zustand.
Aufgabe 5:
OB = Organisationsbausteine (wichtig: OB 1!)
FC = Funktionen, dies sind Codebausteine ohne Gedächtnis
FB = Funktionsbausteine, dies sind parametrierbare Bausteine, die innerhalb eines Programms mehrfach (mit unterschiedl.) Parametern verwendet werden kön-nen.
SFB und SFC = vorprogrammierte und getestete Bausteine, die ins Betriebssystem integriert sind und nicht geändert werden können.
DB = Datenbausteine, enthalten nur Daten jedoch keine Befehle. In ihnen werden Daten für andere Bausteine und für den Datenaustausch mit anderen Syste-men (PC, Datenbanken, Visualisierungssysteme usw.) gespeichert und über-geben.
7 Simatic S7 – Step7 ∙ Praxistraining
Aufgabe 6:
Es ist mindestens ein Codebaustein z. B. FC (Funktion) und der Organisiationsbau-stein OB 1 erforderlich. In OB1 muss der zuletzt genannte Codebaustein FC aufgeru-fen werden.
Aufgabe 7:
OB1 ist ein Baustein, der vom Betriebssystem bei jedem Programm-Durchlauf zyk-lisch aufgerufen wird. Aus OB1 wird dann auf andere Bausteine weiter gesprungen.
OB100 wird im Falle eines Neustarts (z. B. durch Umschalten des Betriebsarten-schalters von STOP auf RUN, nach Netzausfall usw.) aufgerufen. Dort können dann bestimmte Aktionen veranlasst werden. Beispielsweise könnte von OB100 aus ein Codebaustein FC… angesprungen werden, in dem eine Grundstellungsfahrt, Refe-renzfahrt etc. der Anlage oder Maschine veranlasst wird.
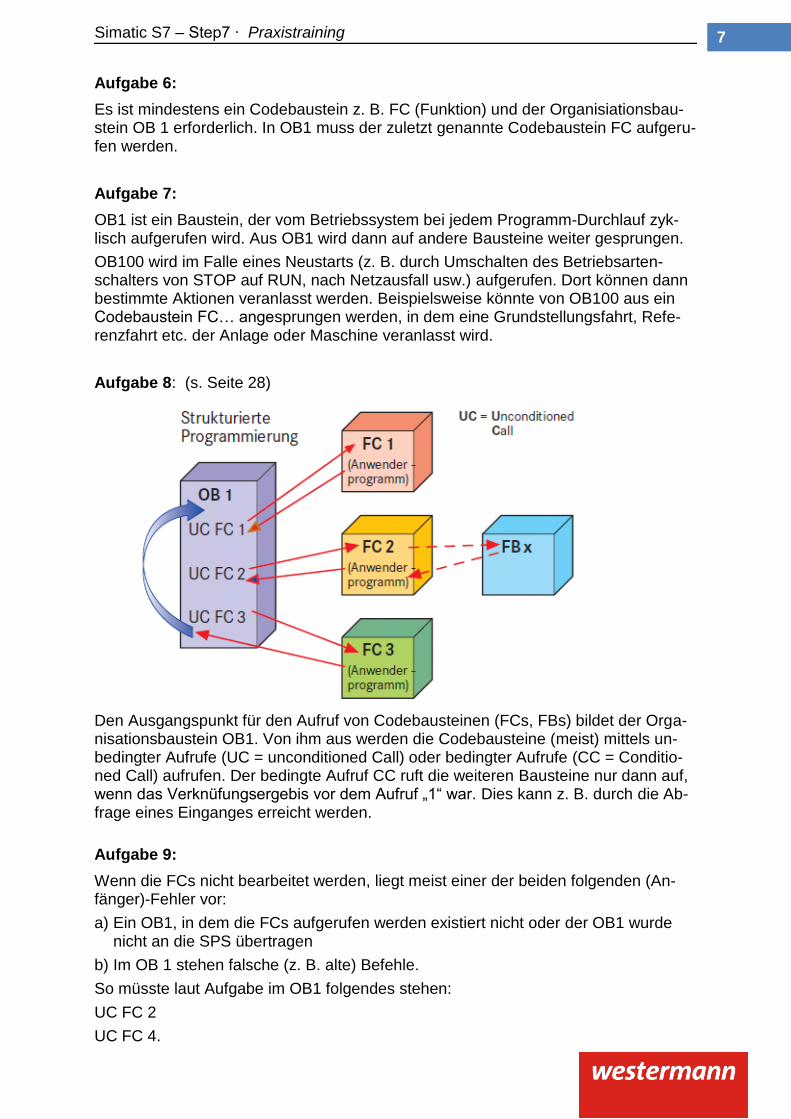
Aufgabe 8: (s. Seite 28)
Den Ausgangspunkt für den Aufruf von Codebausteinen (FCs, FBs) bildet der Orga-nisationsbaustein OB1. Von ihm aus werden die Codebausteine (meist) mittels un-bedingter Aufrufe (UC = unconditioned Call) oder bedingter Aufrufe (CC = Conditio-ned Call) aufrufen. Der bedingte Aufruf CC ruft die weiteren Bausteine nur dann auf, wenn das Verknüfungsergebis vor dem Aufruf „1“ war. Dies kann z. B. durch die Ab-frage eines Einganges erreicht werden.
Aufgabe 9:
Wenn die FCs nicht bearbeitet werden, liegt meist einer der beiden folgenden (An-fänger)-Fehler vor:
a) Ein OB1, in dem die FCs aufgerufen werden existiert nicht oder der OB1 wurde nicht an die SPS übertragen
b) Im OB 1 stehen falsche (z. B. alte) Befehle.
So müsste laut Aufgabe im OB1 folgendes stehen:
UC FC 2
UC FC 4.
Simatic S7 – Step7 ∙ Praxistraining 8
Befindet sich statt dessen ein OB1 mit anderen, nicht mehr aktuellen Aufrufen (z. B. UC FC 5, UC FC 6) in der SPS, so können die beiden Bausteine FC 2 und FC 4 nicht aufgerufen werden. Sie „liegen“ nutzlos im Speicher der SPS.
Aufgabe 10:
Mögliche Datentypen in DBs:
BOOL, Byte, Word,
DWord (Doppelwort = 32 bit),
Char (Chraracter, z. B. Buchstaben „A“, „B“ …),
INT (Integer = Ganzzahl zwischen -32768 und + 32767)
S5Time (Zeitwert für Timerbausteine)
Aufgabe 11:
Würden Eingangszustände nicht zwischengespeichert, könnten diese nicht für den gesamten, einmaligen Programmdurchlauf konstant gehalten werden. Dann könnten Eingänge innerhalb des Programms an verschiedenen Programmstellen unterschied-liche Zustände haben (z. B. am Anfang „0“, weil ein bestimmter Schalter nicht ge-drückt war, später „1“, weil dann der Schalter eingeschaltet wurde).
Dies würde zu Fehlfunktionen innerhalb des Programms führen.
Aufgabe 12:
Lange Programmlaufzeiten führen dazu, dass die SPS – und damit auch die Aktoren der Anlage/Maschine - verzögert auf Befehle, Ereignisse usw. reagieren. Dies kann zu verspäteten, unpräzisen Reaktionen der Anlage führen. Sehr schnelle Produkti-onsvorgänge wären dann nicht mehr möglich, weil die „Echtzeitfähigkeit“ nicht mehr gegeben ist. Beispielsweise könnte es dann passieren, dass Teile, die am Lichtstrahl eines optischen Sensors anhalten sollen über die vorgesehene Position hinaus fah-ren. Daraufhin könnte es zu Fehlern, hohen Fertigungstoleranzen usw. am Teil kommen.
Aufgabe 13:
Um lange Zykluszeiten zu vermeiden, können folgende Maßnahmen getroffen wer-den:
a) Programme sinnvoll strukturieren, um die Anzahl an Befehlen gering zu halten.
b) Zentralbaugruppen (CPUs) mit schnellen Prozessoren verwenden. Je leistungsfä-higer (und damit teurer) eine Zentralbaugruppe ist, desto rascher arbeitet sie die Programme ab.
c) In umfangreichen Anlagen werden meist mehrere Automatisierungssysteme (SPS-Geräte) verwendet. Jede SPS ist für einen bestimmten Anlagenteil zuständig. Damit hat jede SPS weniger Ein-/Ausgänge und Programmumfang. Dies ermög-licht eine schnellere Programmbearbeitung. Wichtige Informationen können per Busleitungen direkt zwischen der vernetzten SPS-Geräten ausgetauscht werden
9 Simatic S7 – Step7 ∙ Praxistraining
Kapitel 5 Seite 46
Die Aufgaben 1 bis 12
dienen dazu, Vertrautheit im Umgang mit dem Programm zu erlangen.
Gehen Sie entsprechend den Abbildungen der jeweiligen Aufgabenstellung vor. Achten Sie darauf, dass Ihre Ergebnisse mit den abgebildeten Screenshots überein-stimmen. Selbstverständlich können auf Grund der Ihnen zur Verfügung stehenden S7-Hardware auch andere Konfigurationen vorgenommen werden.
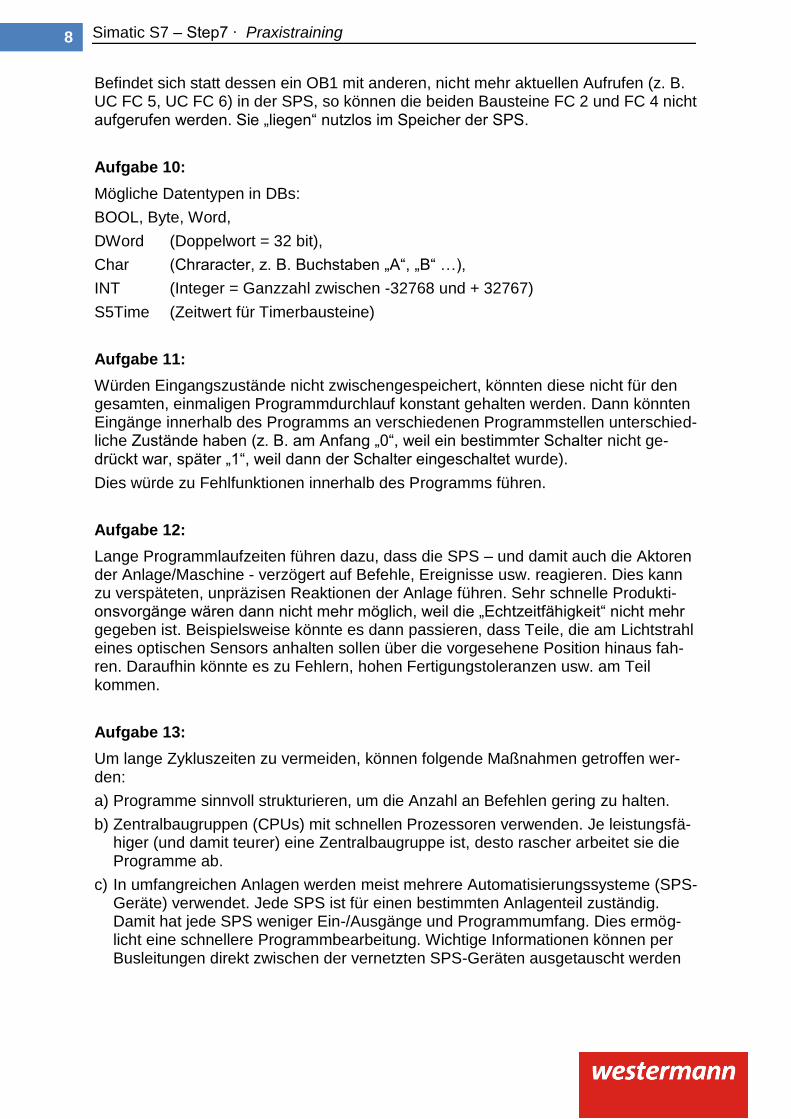
Kapitel 7 Seite 53
Aufgabe 1 und 2:
Simatic S7 – Step7 ∙ Praxistraining 10
Kapitel 8 Seite 54
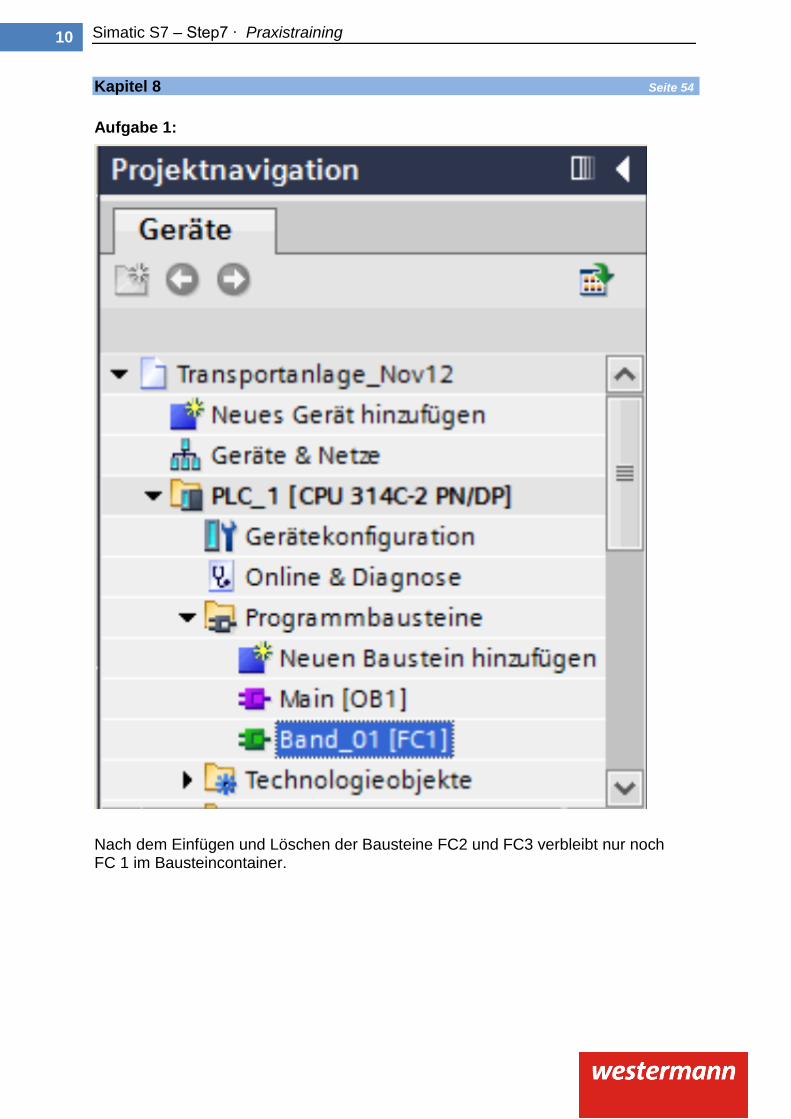
Aufgabe 1:
Nach dem Einfügen und Löschen der Bausteine FC2 und FC3 verbleibt nur noch FC 1 im Bausteincontainer.
11 Simatic S7 – Step7 ∙ Praxistraining
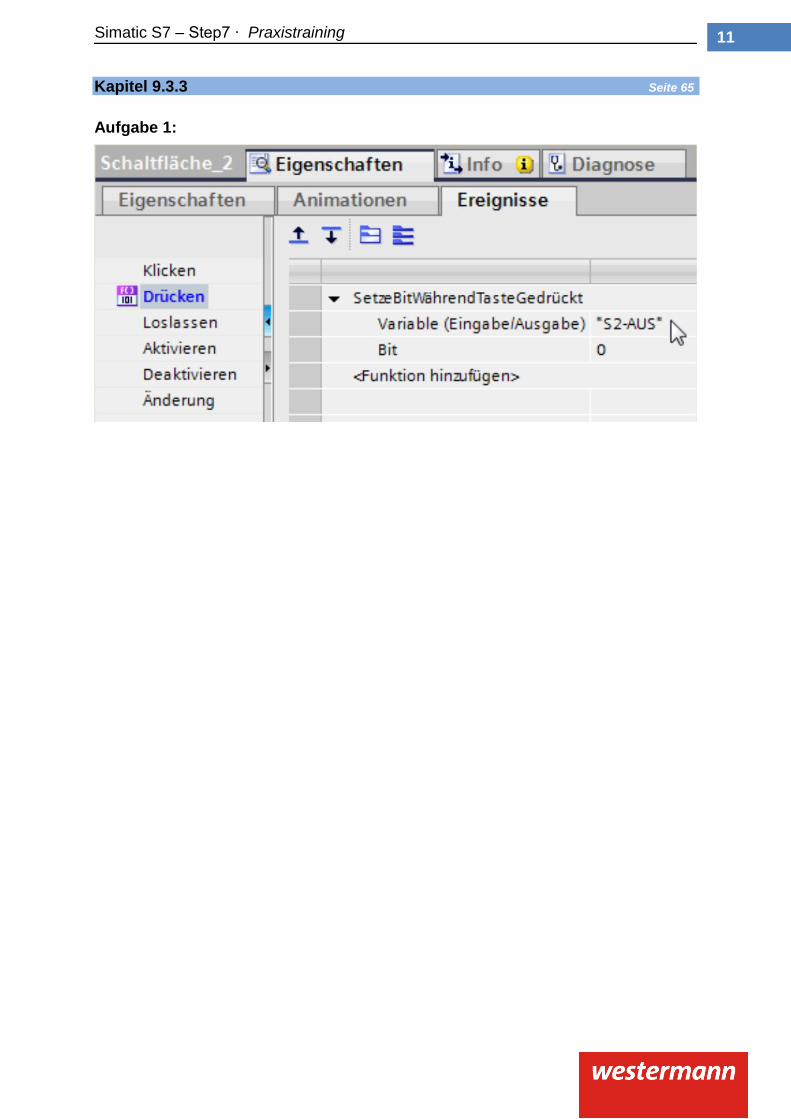
Kapitel 9.3.3 Seite 65
Aufgabe 1:
Simatic S7 – Step7 ∙ Praxistraining 12
Kapitel 12.1 Seite 90
Aufgabe 1:
a) Bei einer Steuerung zur Drehrichtungsumkehr („Wendeschützschaltung“ bei VPS) werden zwei Motorschütze so angesteuert, dass immer nur einer von beiden an-gezogen sein kann. Ein Schütz ist für die Drehrichtung „rechts“, der andere für die gegensinnige Drehrichtung zuständig. Ein gleichzeitiges Einschalten beider Schütze muss schaltungstechnisch verhindert werden.
Um die Drehrichtung von Drehstrommotoren zu ändern, wird mittels der Schütze die Anschlussreihenfolge der Außenleiter (Phasen) geändert (=Vertauschen zwei-er Außenleiter). Siehe folgendes Beispiel:
Schütz Q1: L1 −>U, L2 −>V, L3 −>W Schütz Q2: L1−>U, L2 −>W, L3 −>V
b) = PS 300 Powersupply (Netzteil), das an 230 V AC angeschlossen wird und 24 V DC an die Zentralbaugruppe, die Geber (Sensoren) und an die Frontstecker der Digital-Ausgabebaugruppen liefert.
= Zentralbaugruppe (CPU). Sie enthält den Prozessor und die Speicher. In ihr wird das Programm abgearbeitet, sie hält mittels Busverbindung Kontakt zu den Ein-/Ausgabebaugruppen.
Anschlüsse: 24 V DC-Versorgung (kommt vom Netzteil) und Busleitung (über steckbare Verbindungskämme)
= Digitaleingabebaugruppe (DI-300). Sie ist mittels Busverbindern an die CPU gekoppelt. An der Frontseite werden die digitalen Eingangssignale (z. B. 24 V DC oder 120/230 V AC) angeschlossen. Diese Signale sind mit Hilfe von Optokopp-lern galvanisch vom internen Bus getrennt.
= Digitalausgabebaugruppe (DO-300). Sie ist über Busverbinder an die CPU gekoppelt. An der Frontseite werden die digitalen Ausgangssignale (z. B. 24 V DC oder 120/230 V AC) abgegeben. Diese Signale sind mit Hilfe von Optokopplern galvanisch vom internen Bus getrennt. Damit ein entsprechender Ausgangsstrom (z. B. 0,5 A bei 24 V-Baugruppen) ausgegeben werden kann, müssen diese Bau-gruppen an der Frontseite mit der entsprechenden Ausgangsspannung versorgt werden.
c) Die Öffnerkontakte (= Hilfskontakte) dienen dazu, die beiden Motorschütze gegen-einander zu verriegeln. Das bedeutet, wenn einer der beiden Schütze angezogen ist, verhindert dessen Verriegelungskontakt das Anziehen des zweiten Schützes.
Diese Verriegelung ist bei VPS als Schutz gegen gleichzeitiges Anziehen anzu-wenden. Aber auch bei SPS-Aufbauten macht die Maßnahme Sinn, auch wenn die beiden Ausgänge sowieso softwaremäßig verriegelt werden. Bleibt nämlich ei-nes der Schütze mechanisch „kleben“ (z. B. wegen Festschmoren), so würde dies von der Software u. U. nicht erkannt. Die Verriegelungskontakte verhindern aber auch in diesem Fall ein gleichzeitiges Einschalten beider Schütze.
d) die beiden Öffner B3 und B4 stellen die Endschalter des Rolltores in der oberen bzw. unteren Position dar.
e) B1 ist ein Kontakt mir thermischer Auslösung (z. B. Bimetall oder Heißleiter). Er hat die Aufgabe, den Motor vor Überlastung zu schützen. Er könnte direkt am Mo-tor montiert sein, um die Temperatur direkt zu erfassen (= Motorvollschutz). In den meisten Fällen wird jedoch die Motortemperatur indirekt erfasst, indem man so genannte Motorschutzrelais in den Laststromkreis einbaut. Sie erfassen den Last-strom und lösen bei zu großen Strömen einen Hilfskontakt (hier B1) aus.
13 Simatic S7 – Step7 ∙ Praxistraining
f) Drahtbruchsicherheit bedeutet, dass im Falle einer Unterbrechung der Steuer-stromkreise die Anlage einen sicheren Zustand einnimmt.
– EIN-Geber (hier S1 und S2) sind als Schließer (NO) ausgeführt. Wird eine Steuerleitung unterbrochen, kommen die Ein-Signale nicht mehr an der SPS an. Die Anlage bleibt aus = sicherer Zustand.
– AUS-Geber (hier S0, B3 und B4) sind als Öffner (NC) ausgeführt. Wird eine Steuerleitung unterbrochen, hat dies die gleiche Funktion, als würde der ent-sprechende Geber betätigt, es kommt ein „0“-Signal an der SPS an. Die Anla-ge wird ausgeschaltet = sicherer Zustand.
Aufgabe 2:
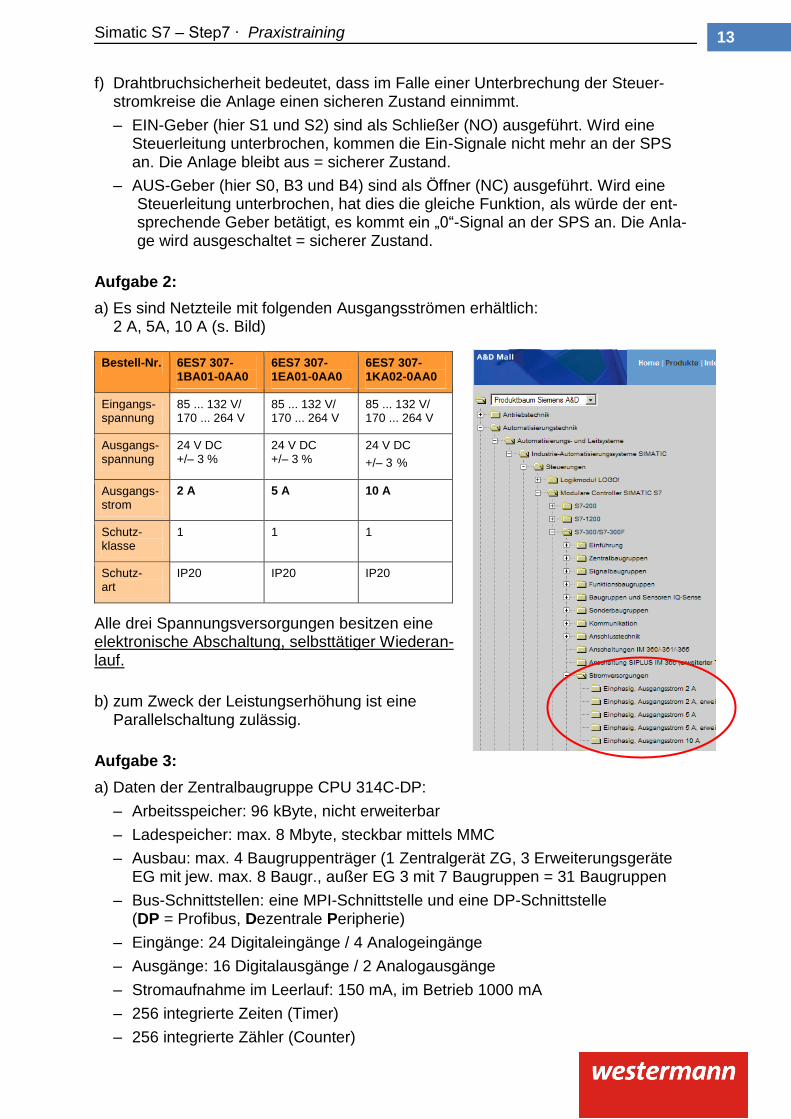
a) Es sind Netzteile mit folgenden Ausgangsströmen erhältlich: 2 A, 5A, 10 A (s. Bild)
Bestell-Nr. 6ES7 307- 1BA01-0AA0
6ES7 307- 1EA01-0AA0
6ES7 307- 1KA02-0AA0
Eingangs- spannung
85 ... 132 V/ 170 ... 264 V
85 ... 132 V/ 170 ... 264 V
85 ... 132 V/ 170 ... 264 V
Ausgangs- spannung
24 V DC +/– 3 %
24 V DC +/– 3 %
24 V DC
+/– 3 %
Ausgangs- strom
2 A 5 A 10 A
Schutz- klasse
1 1 1
Schutz- art
IP20 IP20 IP20
Alle drei Spannungsversorgungen besitzen eine elektronische Abschaltung, selbsttätiger Wiederan-lauf.
b) zum Zweck der Leistungserhöhung ist eine Parallelschaltung zulässig.
Aufgabe 3:
a) Daten der Zentralbaugruppe CPU 314C-DP:
– Arbeitsspeicher: 96 kByte, nicht erweiterbar
– Ladespeicher: max. 8 Mbyte, steckbar mittels MMC
– Ausbau: max. 4 Baugruppenträger (1 Zentralgerät ZG, 3 Erweiterungsgeräte EG mit jew. max. 8 Baugr., außer EG 3 mit 7 Baugruppen = 31 Baugruppen
– Bus-Schnittstellen: eine MPI-Schnittstelle und eine DP-Schnittstelle (DP = Profibus, Dezentrale Peripherie)
– Eingänge: 24 Digitaleingänge / 4 Analogeingänge
– Ausgänge: 16 Digitalausgänge / 2 Analogausgänge
– Stromaufnahme im Leerlauf: 150 mA, im Betrieb 1000 mA
– 256 integrierte Zeiten (Timer)
– 256 integrierte Zähler (Counter)
Simatic S7 – Step7 ∙ Praxistraining 14
b) Der Ladespeicher befindet sich auf den steckbaren MMCs (Micro Memory Card). Es handelt sich dabei um Flash-EPROMs, die man auch als EEPROMs bezeich-net. (Electrically Erasable Programmable Read Only Memory).
Diese Art von Speichern sind nicht-flüchtig, sie behalten das Programm auch nach dem Trennen von der Versorgungsspannung. Technische Anwendungen sind –neben der SPS – beispielsweise die Speicher-Karten von Digitalkameras, USB-Speichersticks usw.
Im Ladespeicher wird das gesamte Programm ( Codebausteine, Datenbausteine und Systemprogramme) abgelegt. Beim Starten der SPS wird das ablauffähige Anwenderprogramm von der MMC in den internen RAM-Speicher der CPU gela-den.
c) Im Hinblick auf die Steuerungsaufgabe sind vor allem folgende, technischen Daten der Zentralbaugruppe zu beachten:
– Verarbeitungsgeschwindigkeit: der Befehle. Hier gilt die Faustregel: Je höher die Zahl, desto schneller. Beispiel: Die CPU 312 arbeitet eine Operati-on in 0,2 µs wesentlich langsamer ab als die weitaus leistungsfähigere CPU 319. Diese benötigt für eine Operation nur 0,01 µs und ist damit zwanzigmal so schnell.
– Speicherplatz: Hier ist vor allem der interne RAM-Arbeitsspeicher von Bedeu-tung, da dieser nicht erweitert werden kann. Ebenso wie in der Verarbeitungs-geschwindigkeit haben die leistungsfähigeren CPUs auch hier wesentlich mehr Speicherplatz integriert.
– Zeiten, Zähler: Auch die Anzahl der integrierten Zeiten und Zähler spielt bei um-fangreichen Anwendungen eine Rolle. Falls also in der beabsichtigten Anwen-dung viele Zeiten oder Zähler erforderlich sind, eine leistungsfähige Zentralbau-gruppe auszuwählen, die diese Funktionen bereit hält.
– Erweiterbarkeit: Da nicht alle Zentralbaugruppen die Möglichkeit des mehrzeili-gen Aufbaus unterstützen (z. B. die Kompakt-SPS S7-312C) verbaut man sich mit solchen CPU-Baugruppen die Möglichkeit, später noch ein Erweiterungsge-rät anzuschließen.
– Kommunikationsmöglichkeiten: In einigen, leistungsfähige CPU-Baugruppen sind Bus-Schnittstellen (z. B. Profi-Bus, Profi-Net) bereits integriert. Damit spart man sich das Stecken eines so genannten Kommunikationsprozessors (CP). Neben den Kosten und dem Konfigurationsaufwand nimmt dieser auch noch ei-nen Steckplatz in Anspruch, der dann für andere Baugruppen fehlt.
– Umweltbedingungen: Es gibt so genannten SIPLUS-CPU-Baugruppen für einen erweiterten Temperaturbereich von – 25°C bis 60°C
Aufgabe 4:
a) Eingangsspannungen von Digitaleingabebaugruppen SM 321: – 24 V DC – 24 V oder 48 V UC (= AC oder DC)* – 48 V – 125 V DC – 120 V AC – 120 V oder 230 V AC*
* Diese Baugruppen arbeiten in einem Spannungsbereich, so dass z. B. die letzte Baugruppe (120V AC oder 230 V AC) sowohl in USA als auch Europa genutzt werden kann.
15 Simatic S7 – Step7 ∙ Praxistraining
b) Üblicherweise haben DI-300 Baugruppen
– 16 oder 32 Eingänge.
– Es gibt eine Baugruppe mit 64 Eingängen (Eingangsspannung hier nur 24 V DC)
– Aus Gründen der Potentialtrennung gibt es bei höheren Eingangsspannungen auch Baugruppen, die nur 8 Eingänge haben.
Aufgabe 5:
a) Ausgangsspannungen von Digitalausgabebaugruppen SM 322: – 24 V DC – 48 V – 125 V DC – 120 V bis 230 V AC – Relaiskontakt-Ausgänge mit 120 V DC oder 230 V AC maximal
b) Üblicherweise haben DO-300 Baugruppen
– 16 oder 32 Ausgänge.
– Es gibt eine Baugruppe mit 64 Ausgängen (Ausgangsspannung hier nur 24 V DC)
– Aus Gründen der Potentialtrennung gibt es bei höheren Ausgangsspannungen auch Baugruppen, die nur 8 Ausgänge haben.
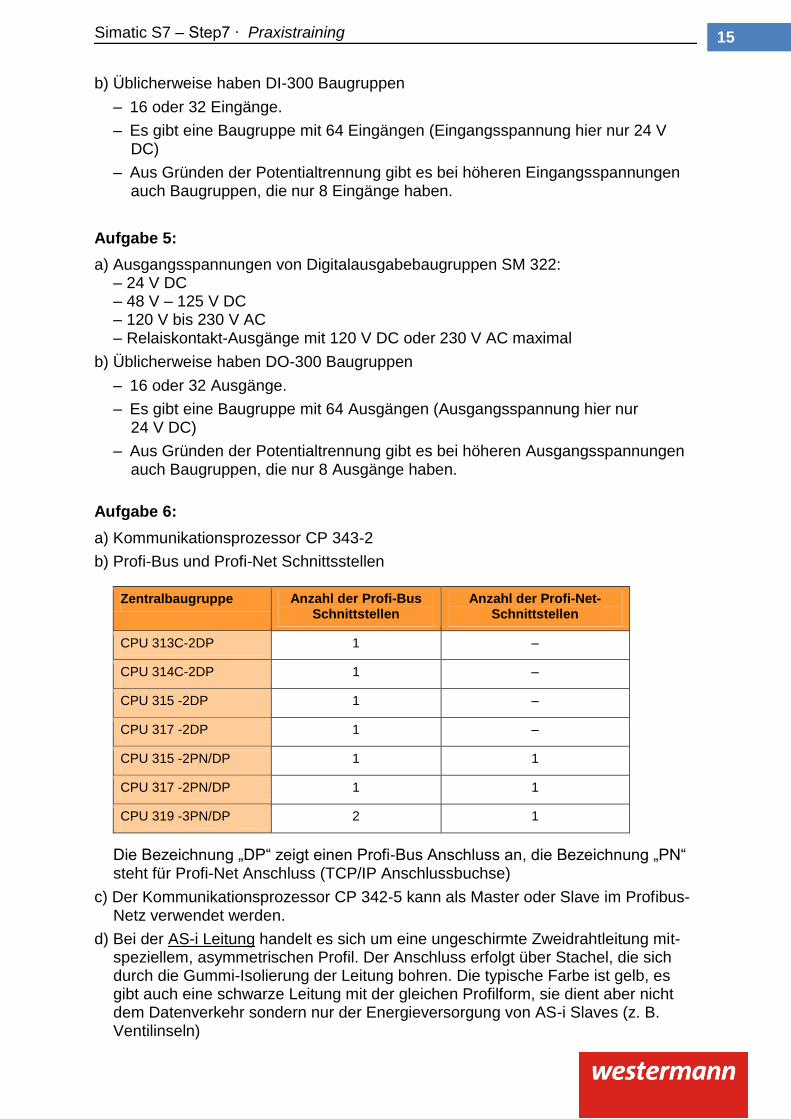
Aufgabe 6:
a) Kommunikationsprozessor CP 343-2
b) Profi-Bus und Profi-Net Schnittsstellen
Zentralbaugruppe Anzahl der Profi-Bus Schnittstellen
Anzahl der Profi-Net-Schnittstellen
CPU 313C-2DP 1 –
CPU 314C-2DP 1 –
CPU 315 -2DP 1 –
CPU 317 -2DP 1 –
CPU 315 -2PN/DP 1 1
CPU 317 -2PN/DP 1 1
CPU 319 -3PN/DP 2 1
Die Bezeichnung „DP“ zeigt einen Profi-Bus Anschluss an, die Bezeichnung „PN“ steht für Profi-Net Anschluss (TCP/IP Anschlussbuchse)
c) Der Kommunikationsprozessor CP 342-5 kann als Master oder Slave im Profibus-Netz verwendet werden.
d) Bei der AS-i Leitung handelt es sich um eine ungeschirmte Zweidrahtleitung mit-speziellem, asymmetrischen Profil. Der Anschluss erfolgt über Stachel, die sich durch die Gummi-Isolierung der Leitung bohren. Die typische Farbe ist gelb, es gibt auch eine schwarze Leitung mit der gleichen Profilform, sie dient aber nicht dem Datenverkehr sondern nur der Energieversorgung von AS-i Slaves (z. B. Ventilinseln)

Simatic S7 – Step7 ∙ Praxistraining 16
Bild: AS-i Leitung
Bei der Profi-Leitung handelt es sich um eine geschirmte Zweidrahtleitung. Die Adern sind rot und grün.
Der Anschluss erfolgt normalerweise über einen neunpoligen SubD Stecker oder über Rundstecker.
Bild: Profibus-Leitungen
17 Simatic S7 – Step7 ∙ Praxistraining
Kapitel 12.2 Seite 91
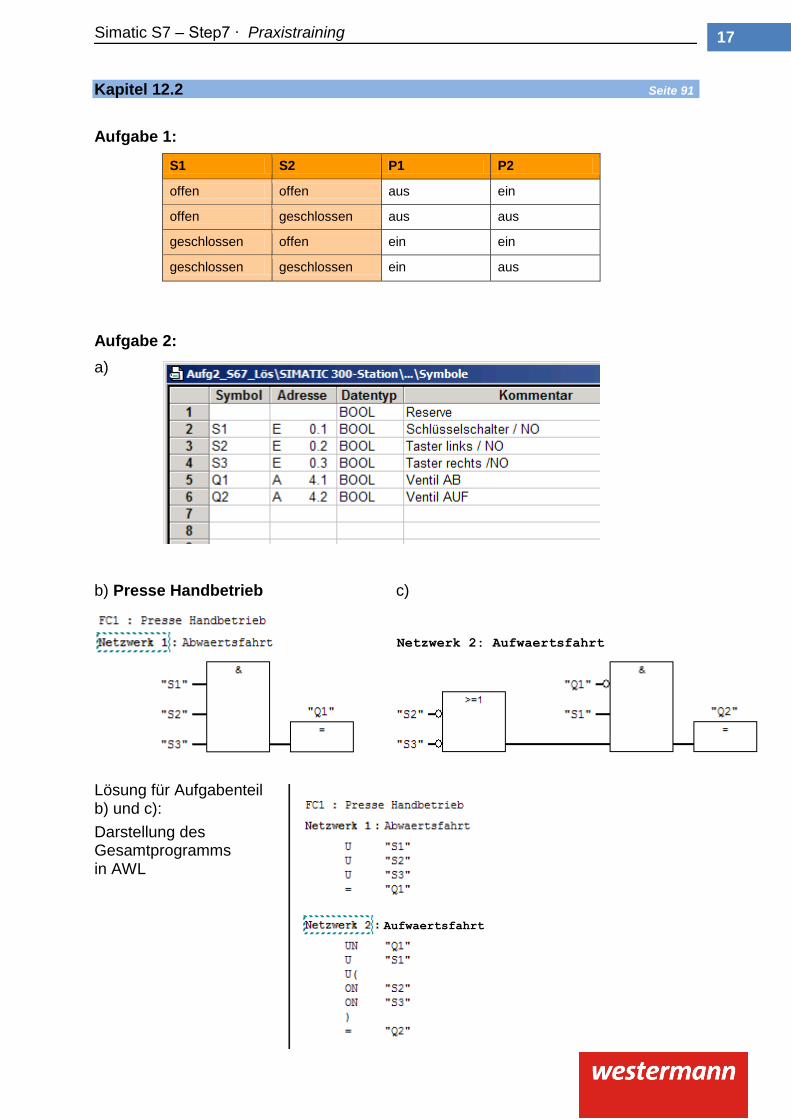
Aufgabe 1:
S1 S2 P1 P2
offen offen aus ein
offen geschlossen aus aus
geschlossen offen ein ein
geschlossen geschlossen ein aus
Aufgabe 2:
a)
b) Presse Handbetrieb c)
Lösung für Aufgabenteil b) und c):
Darstellung des Gesamtprogramms in AWL
Netzwerk 2: Aufwaertsfahrt
Aufwaertsfahrt
Simatic S7 – Step7 ∙ Praxistraining 18
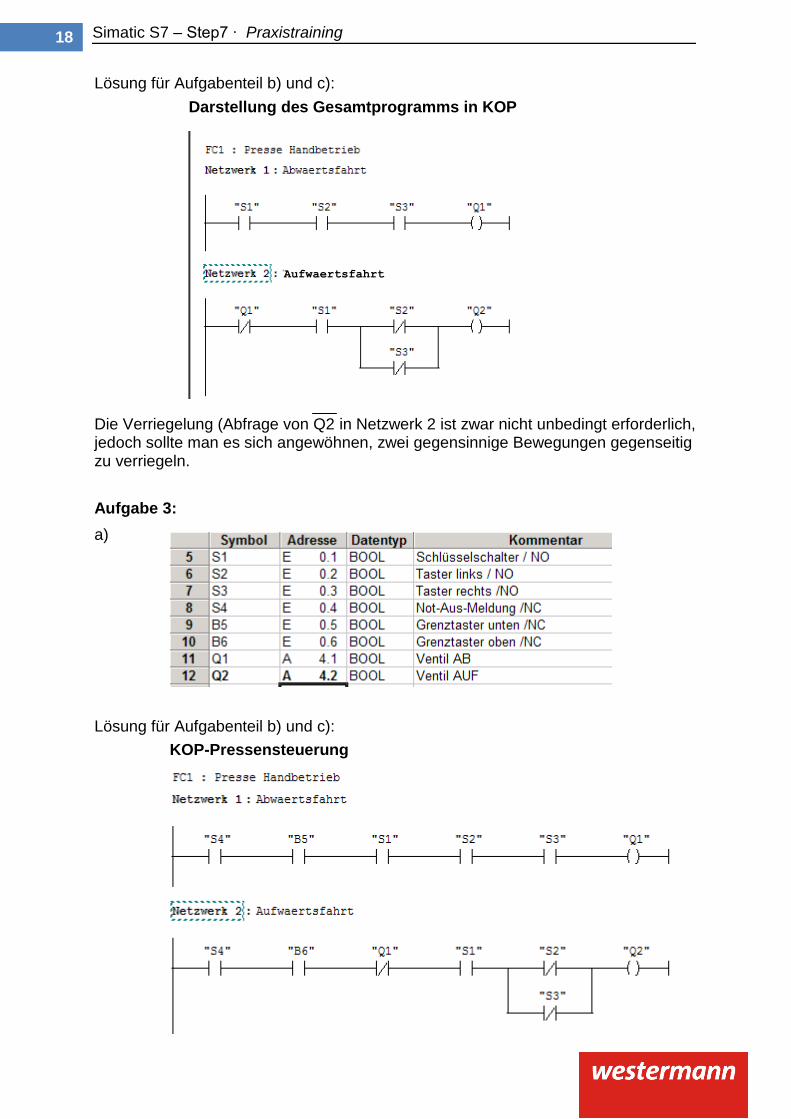
Lösung für Aufgabenteil b) und c):
Darstellung des Gesamtprogramms in KOP
Die Verriegelung (Abfrage von Q2 in Netzwerk 2 ist zwar nicht unbedingt erforderlich, jedoch sollte man es sich angewöhnen, zwei gegensinnige Bewegungen gegenseitig zu verriegeln.
Aufgabe 3:
a)
Lösung für Aufgabenteil b) und c):
KOP-Pressensteuerung
Aufwaertsfahrt
19 Simatic S7 – Step7 ∙ Praxistraining
Lösung für Aufgabenteil b) und c):
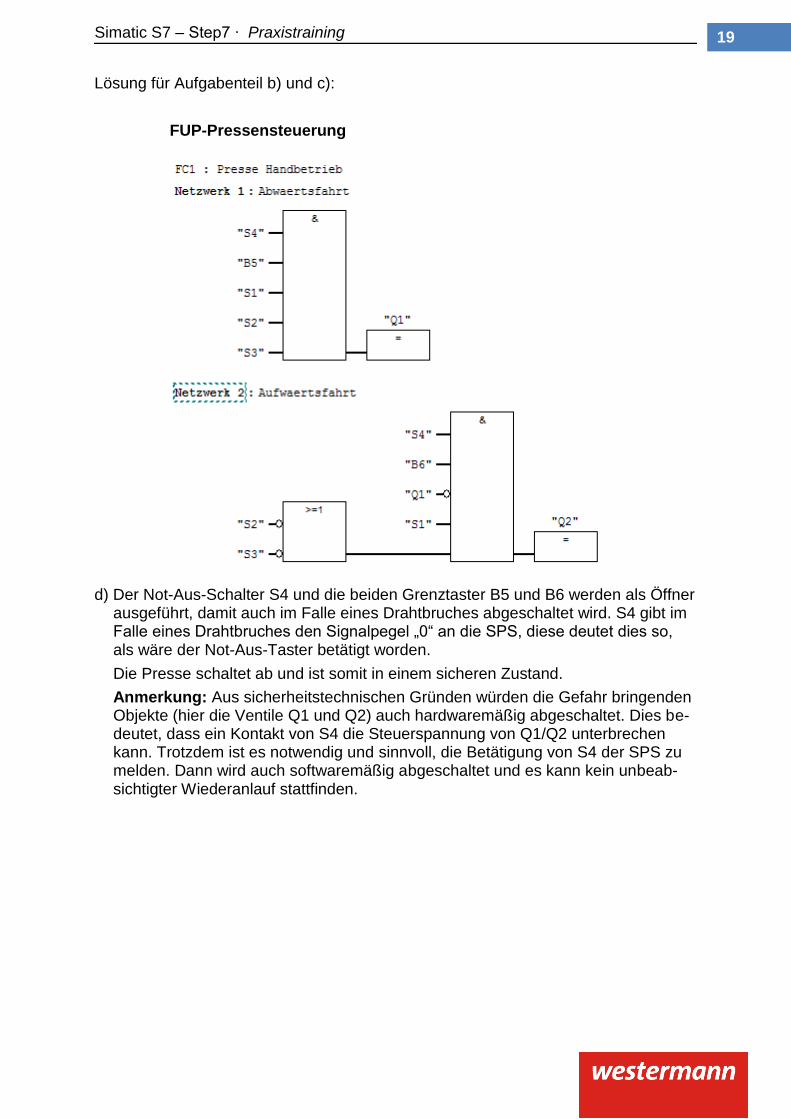
FUP-Pressensteuerung
d) Der Not-Aus-Schalter S4 und die beiden Grenztaster B5 und B6 werden als Öffner ausgeführt, damit auch im Falle eines Drahtbruches abgeschaltet wird. S4 gibt im Falle eines Drahtbruches den Signalpegel „0“ an die SPS, diese deutet dies so, als wäre der Not-Aus-Taster betätigt worden.
Die Presse schaltet ab und ist somit in einem sicheren Zustand.
Anmerkung: Aus sicherheitstechnischen Gründen würden die Gefahr bringenden Objekte (hier die Ventile Q1 und Q2) auch hardwaremäßig abgeschaltet. Dies be-deutet, dass ein Kontakt von S4 die Steuerspannung von Q1/Q2 unterbrechen kann. Trotzdem ist es notwendig und sinnvoll, die Betätigung von S4 der SPS zu melden. Dann wird auch softwaremäßig abgeschaltet und es kann kein unbeab-sichtigter Wiederanlauf stattfinden.
Simatic S7 – Step7 ∙ Praxistraining 20
Kapitel 12.2 Seite 92
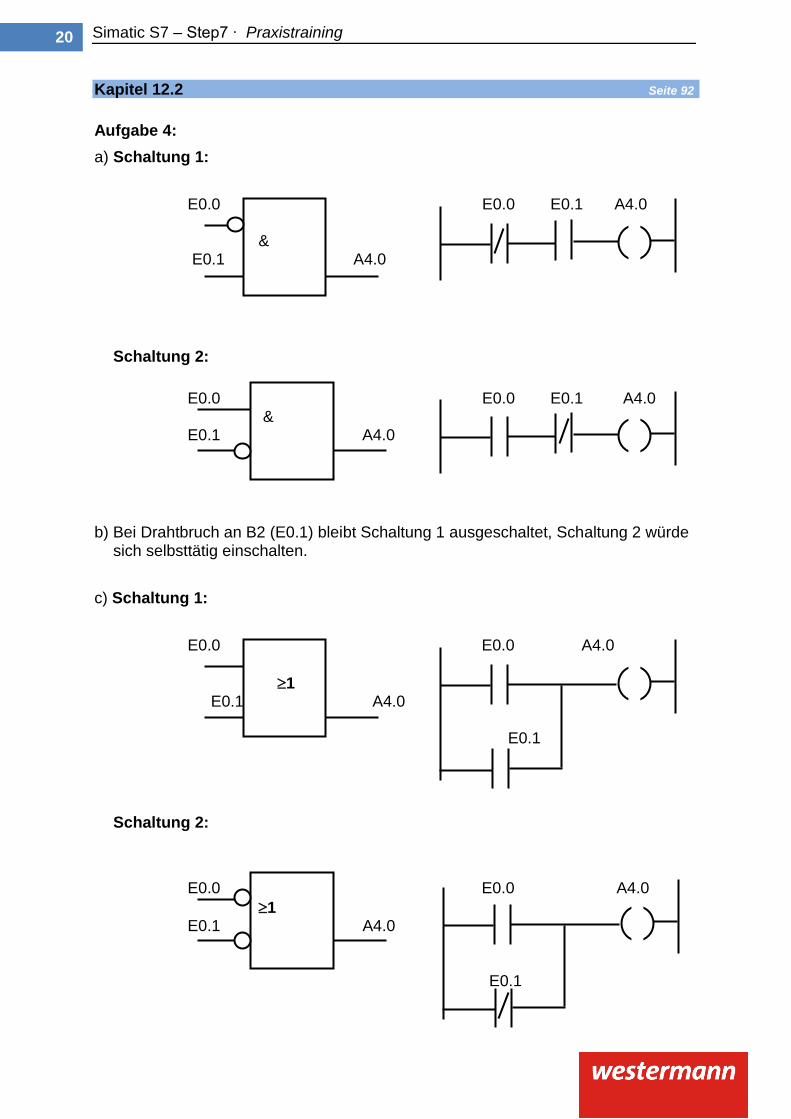
Aufgabe 4:
a) Schaltung 1:
E0.0 E0.0 E0.1 A4.0 & E0.1 A4.0
Schaltung 2:
E0.0 E0.0 E0.1 A4.0 & E0.1 A4.0
b) Bei Drahtbruch an B2 (E0.1) bleibt Schaltung 1 ausgeschaltet, Schaltung 2 würde sich selbsttätig einschalten.
c) Schaltung 1:
E0.0 E0.0 A4.0
1 E0.1 A4.0 E0.1
Schaltung 2:
E0.0 E0.0 A4.0
1 E0.1 A4.0 E0.1
21 Simatic S7 – Step7 ∙ Praxistraining
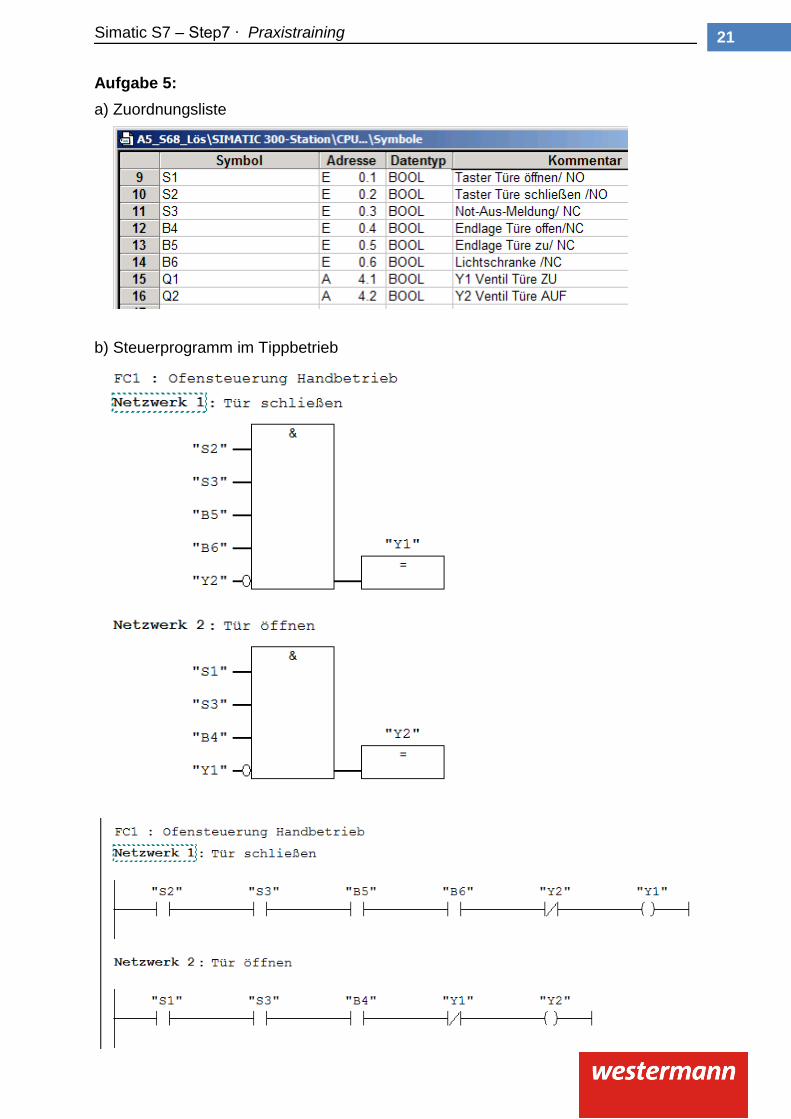
Aufgabe 5:
a) Zuordnungsliste
b) Steuerprogramm im Tippbetrieb
Simatic S7 – Step7 ∙ Praxistraining 22
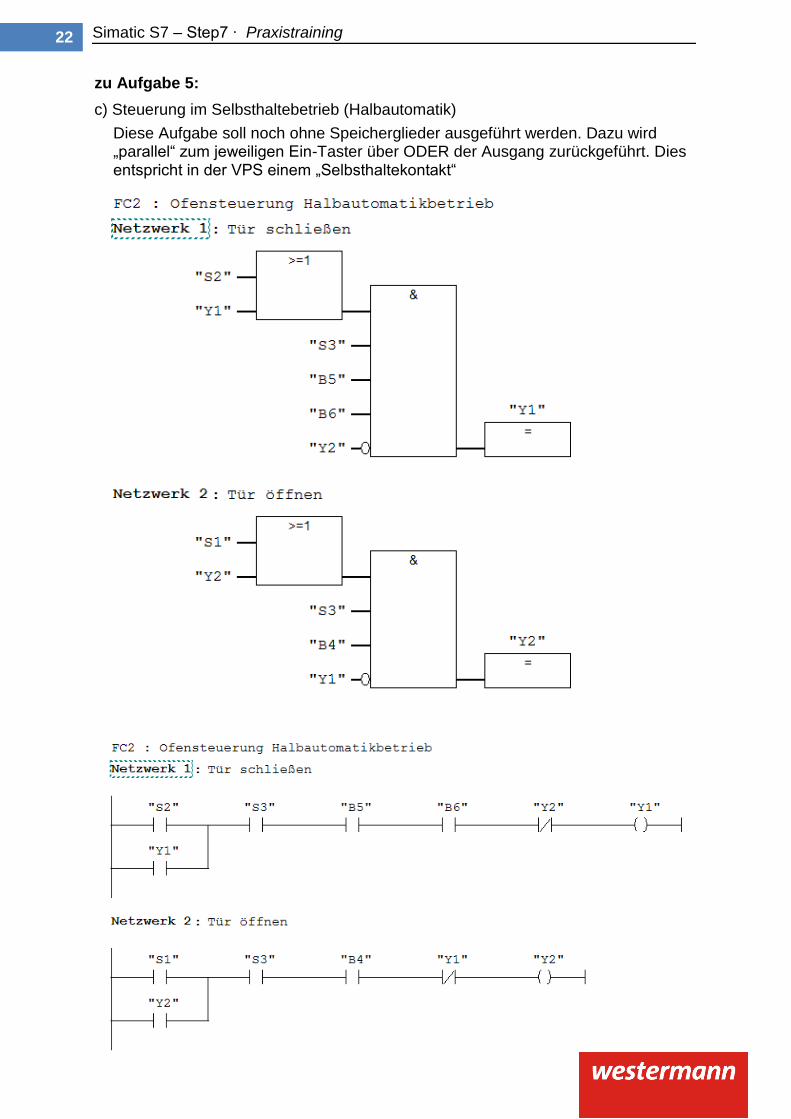
zu Aufgabe 5:
c) Steuerung im Selbsthaltebetrieb (Halbautomatik)
Diese Aufgabe soll noch ohne Speicherglieder ausgeführt werden. Dazu wird „parallel“ zum jeweiligen Ein-Taster über ODER der Ausgang zurückgeführt. Dies entspricht in der VPS einem „Selbsthaltekontakt“
23 Simatic S7 – Step7 ∙ Praxistraining
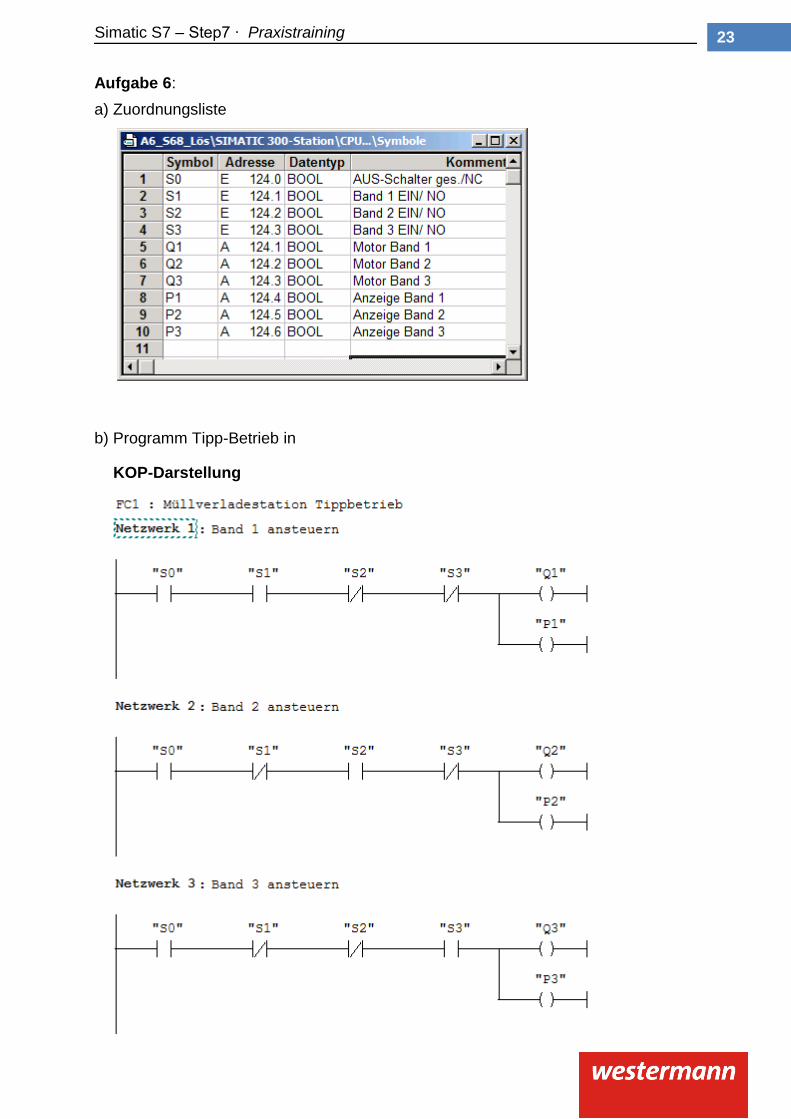
Aufgabe 6:
a) Zuordnungsliste
b) Programm Tipp-Betrieb in
KOP-Darstellung
Simatic S7 – Step7 ∙ Praxistraining 24
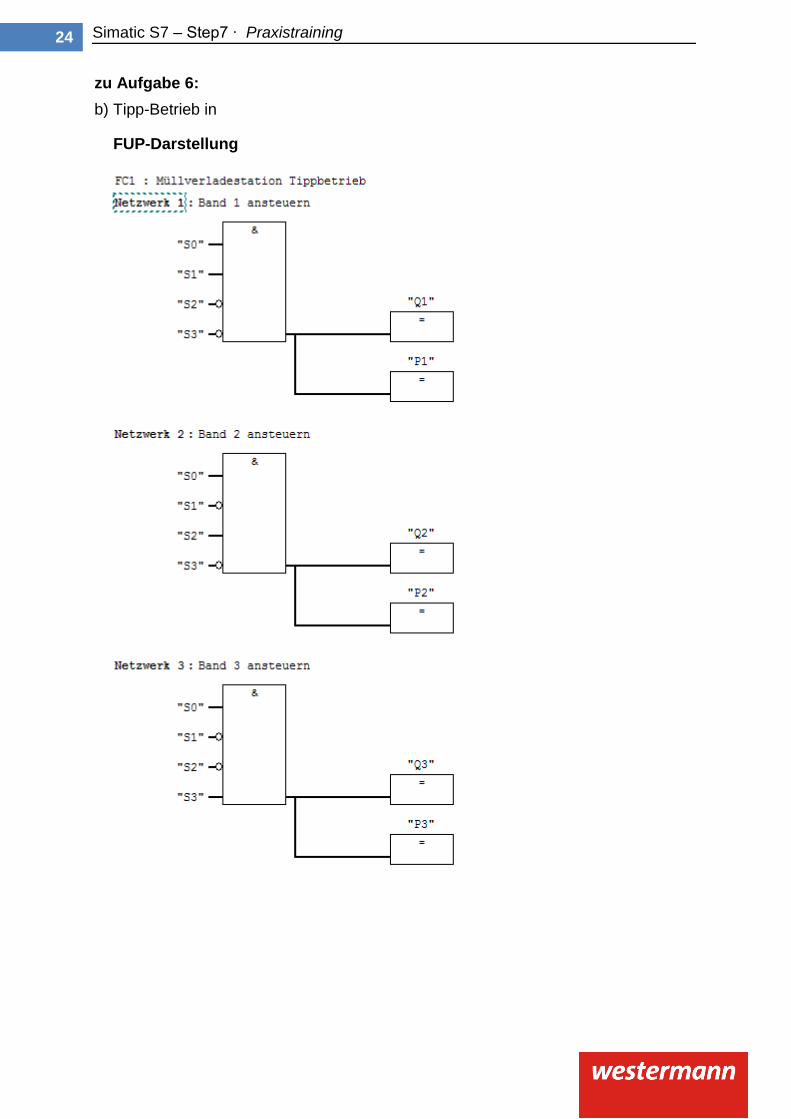
zu Aufgabe 6:
b) Tipp-Betrieb in
FUP-Darstellung
25 Simatic S7 – Step7 ∙ Praxistraining
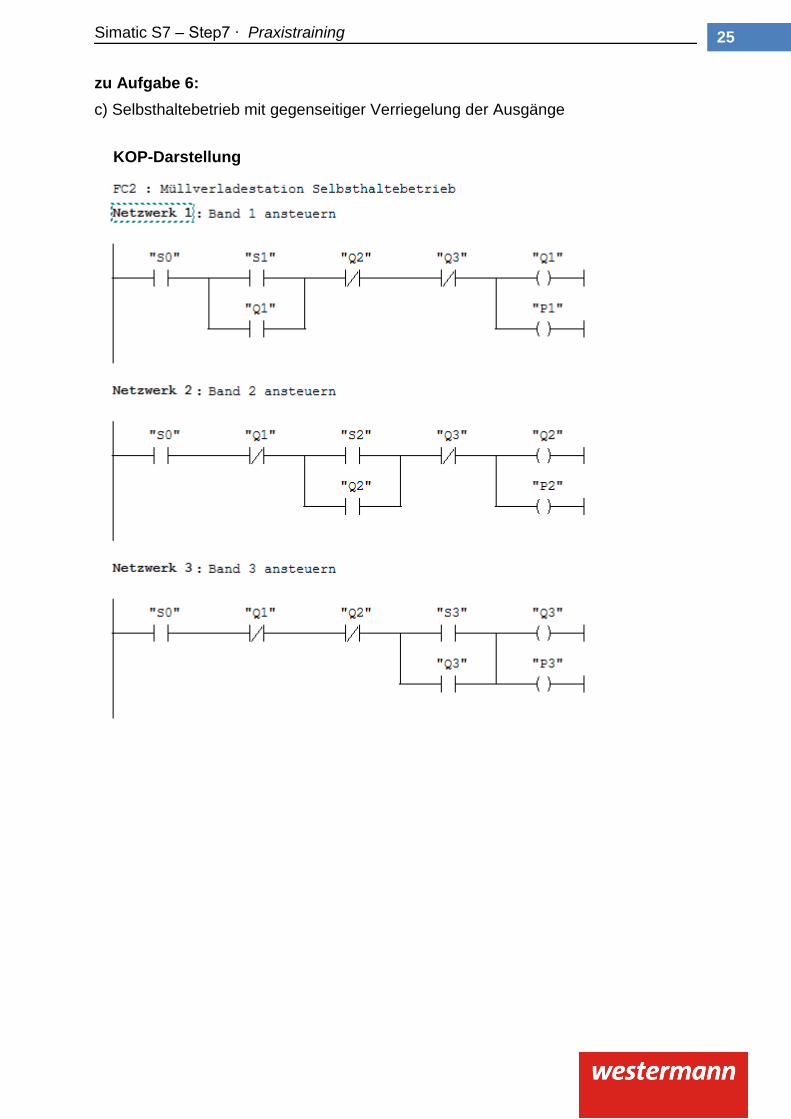
zu Aufgabe 6:
c) Selbsthaltebetrieb mit gegenseitiger Verriegelung der Ausgänge
KOP-Darstellung
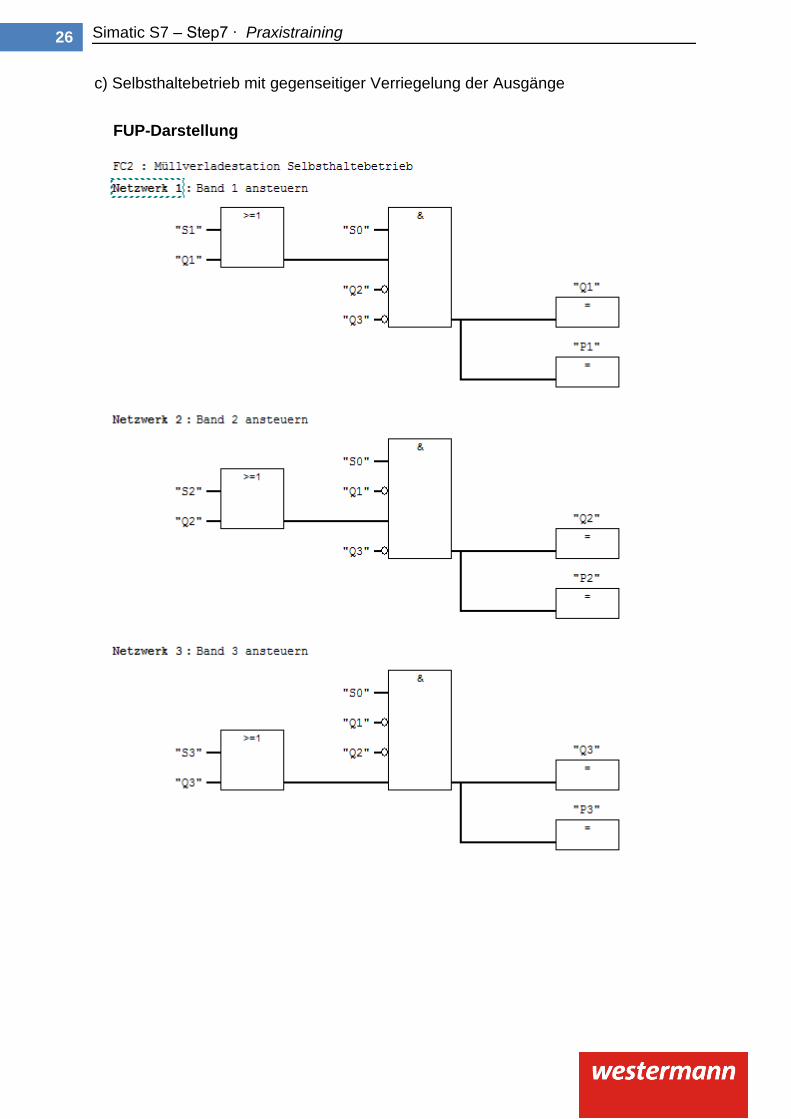
Simatic S7 – Step7 ∙ Praxistraining 26
c) Selbsthaltebetrieb mit gegenseitiger Verriegelung der Ausgänge
FUP-Darstellung
27 Simatic S7 – Step7 ∙ Praxistraining
Kapitel 12.3 Seite 93
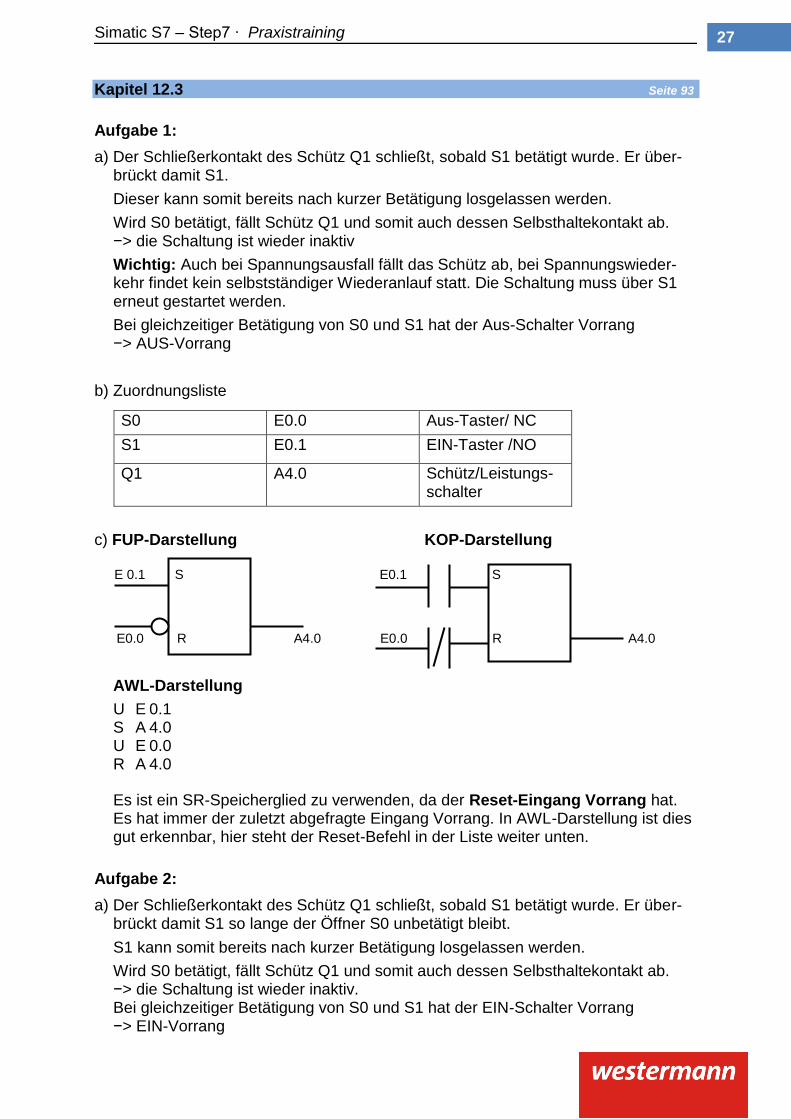
Aufgabe 1:
a) Der Schließerkontakt des Schütz Q1 schließt, sobald S1 betätigt wurde. Er über-brückt damit S1.
Dieser kann somit bereits nach kurzer Betätigung losgelassen werden.
Wird S0 betätigt, fällt Schütz Q1 und somit auch dessen Selbsthaltekontakt ab. −> die Schaltung ist wieder inaktiv
Wichtig: Auch bei Spannungsausfall fällt das Schütz ab, bei Spannungswieder-kehr findet kein selbstständiger Wiederanlauf statt. Die Schaltung muss über S1 erneut gestartet werden.
Bei gleichzeitiger Betätigung von S0 und S1 hat der Aus-Schalter Vorrang −> AUS-Vorrang
b) Zuordnungsliste
S0 E0.0 Aus-Taster/ NC
S1 E0.1 EIN-Taster /NO
Q1 A4.0 Schütz/Leistungs- schalter
c) FUP-Darstellung KOP-Darstellung
E 0.1 S E0.1 S
E0.0 R A4.0 E0.0 R A4.0
AWL-Darstellung
U E 0.1 S A 4.0 U E 0.0 R A 4.0
Es ist ein SR-Speicherglied zu verwenden, da der Reset-Eingang Vorrang hat. Es hat immer der zuletzt abgefragte Eingang Vorrang. In AWL-Darstellung ist dies gut erkennbar, hier steht der Reset-Befehl in der Liste weiter unten.
Aufgabe 2:
a) Der Schließerkontakt des Schütz Q1 schließt, sobald S1 betätigt wurde. Er über-brückt damit S1 so lange der Öffner S0 unbetätigt bleibt.
S1 kann somit bereits nach kurzer Betätigung losgelassen werden.
Wird S0 betätigt, fällt Schütz Q1 und somit auch dessen Selbsthaltekontakt ab. −> die Schaltung ist wieder inaktiv. Bei gleichzeitiger Betätigung von S0 und S1 hat der EIN-Schalter Vorrang −> EIN-Vorrang
Simatic S7 – Step7 ∙ Praxistraining 28
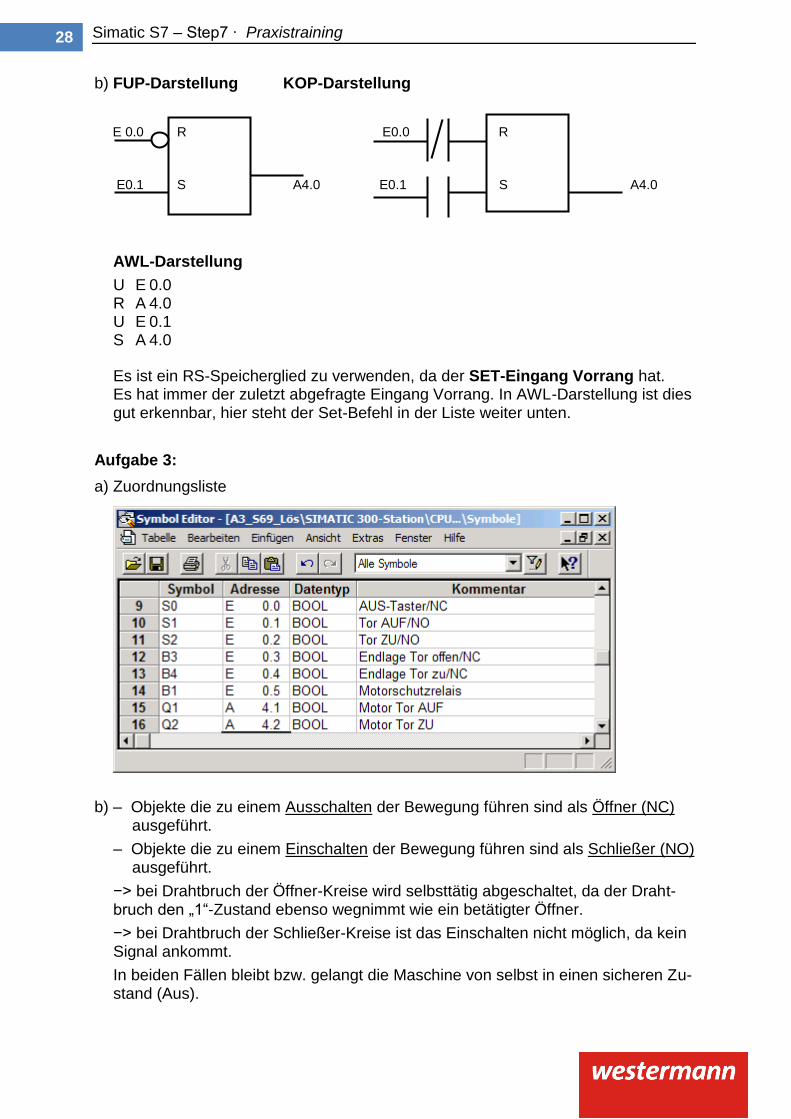
b) FUP-Darstellung KOP-Darstellung
E 0.0 R E0.0 R
E0.1 S A4.0 E0.1 S A4.0
AWL-Darstellung
U E 0.0 R A 4.0 U E 0.1 S A 4.0
Es ist ein RS-Speicherglied zu verwenden, da der SET-Eingang Vorrang hat. Es hat immer der zuletzt abgefragte Eingang Vorrang. In AWL-Darstellung ist dies gut erkennbar, hier steht der Set-Befehl in der Liste weiter unten.
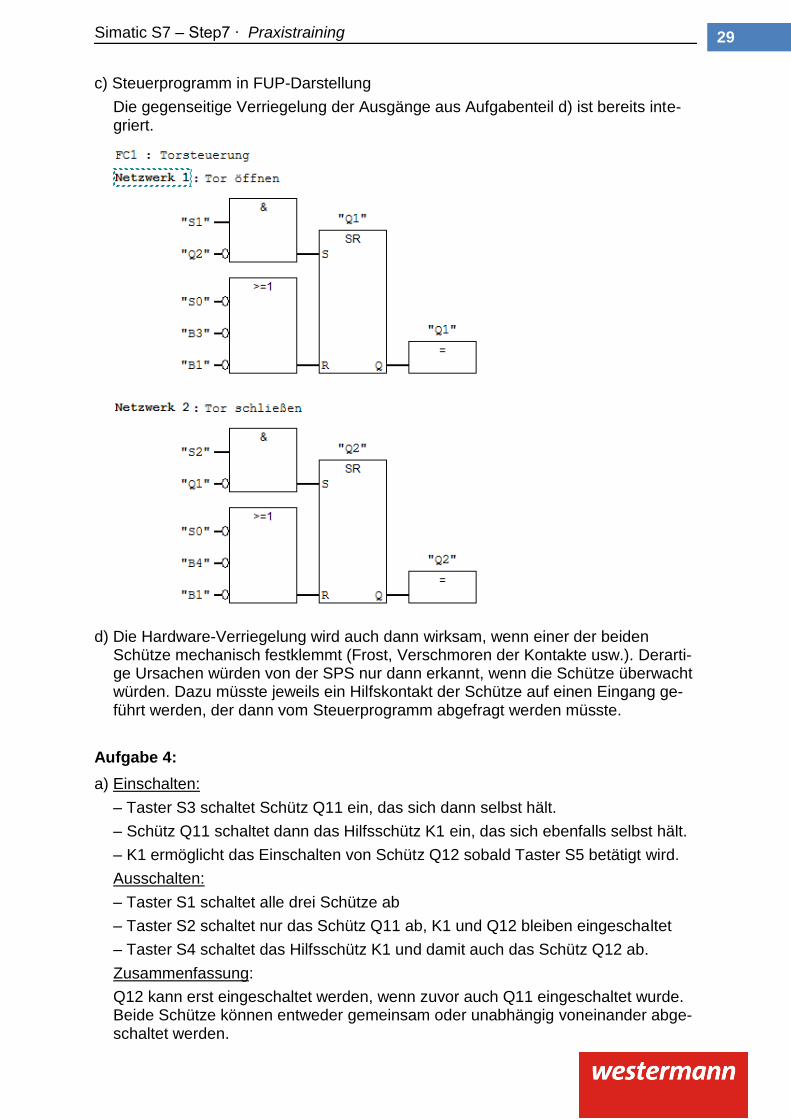
Aufgabe 3:
a) Zuordnungsliste
b) – Objekte die zu einem Ausschalten der Bewegung führen sind als Öffner (NC) ausgeführt.
– Objekte die zu einem Einschalten der Bewegung führen sind als Schließer (NO) ausgeführt.
−> bei Drahtbruch der Öffner-Kreise wird selbsttätig abgeschaltet, da der Draht-bruch den „1“-Zustand ebenso wegnimmt wie ein betätigter Öffner.
−> bei Drahtbruch der Schließer-Kreise ist das Einschalten nicht möglich, da kein Signal ankommt.
In beiden Fällen bleibt bzw. gelangt die Maschine von selbst in einen sicheren Zu-stand (Aus).
29 Simatic S7 – Step7 ∙ Praxistraining
c) Steuerprogramm in FUP-Darstellung
Die gegenseitige Verriegelung der Ausgänge aus Aufgabenteil d) ist bereits inte-griert.
d) Die Hardware-Verriegelung wird auch dann wirksam, wenn einer der beiden Schütze mechanisch festklemmt (Frost, Verschmoren der Kontakte usw.). Derarti-ge Ursachen würden von der SPS nur dann erkannt, wenn die Schütze überwacht würden. Dazu müsste jeweils ein Hilfskontakt der Schütze auf einen Eingang ge-führt werden, der dann vom Steuerprogramm abgefragt werden müsste.
Aufgabe 4:
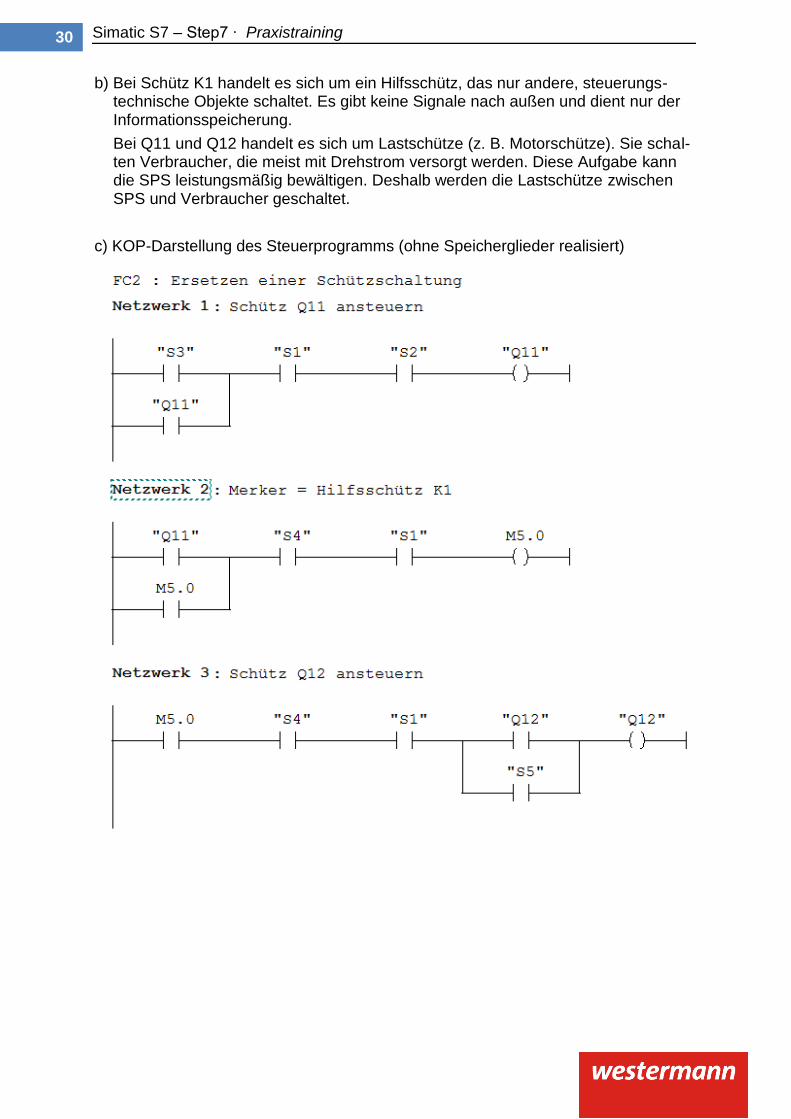
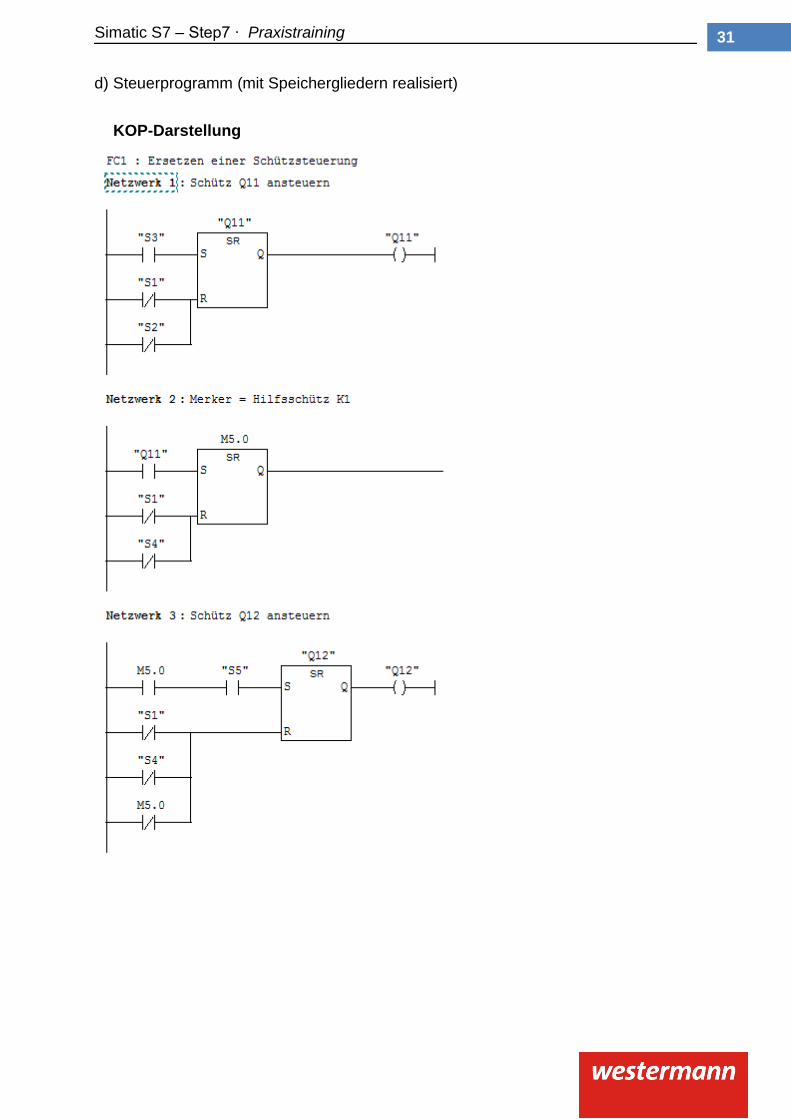
a) Einschalten:
– Taster S3 schaltet Schütz Q11 ein, das sich dann selbst hält.
– Schütz Q11 schaltet dann das Hilfsschütz K1 ein, das sich ebenfalls selbst hält.
– K1 ermöglicht das Einschalten von Schütz Q12 sobald Taster S5 betätigt wird.
Ausschalten:
– Taster S1 schaltet alle drei Schütze ab
– Taster S2 schaltet nur das Schütz Q11 ab, K1 und Q12 bleiben eingeschaltet
– Taster S4 schaltet das Hilfsschütz K1 und damit auch das Schütz Q12 ab.
Zusammenfassung:
Q12 kann erst eingeschaltet werden, wenn zuvor auch Q11 eingeschaltet wurde. Beide Schütze können entweder gemeinsam oder unabhängig voneinander abge-schaltet werden.
Simatic S7 – Step7 ∙ Praxistraining 30
b) Bei Schütz K1 handelt es sich um ein Hilfsschütz, das nur andere, steuerungs-technische Objekte schaltet. Es gibt keine Signale nach außen und dient nur der Informationsspeicherung.
Bei Q11 und Q12 handelt es sich um Lastschütze (z. B. Motorschütze). Sie schal-ten Verbraucher, die meist mit Drehstrom versorgt werden. Diese Aufgabe kann die SPS leistungsmäßig bewältigen. Deshalb werden die Lastschütze zwischen SPS und Verbraucher geschaltet.
c) KOP-Darstellung des Steuerprogramms (ohne Speicherglieder realisiert)
31 Simatic S7 – Step7 ∙ Praxistraining
d) Steuerprogramm (mit Speichergliedern realisiert)
KOP-Darstellung
Simatic S7 – Step7 ∙ Praxistraining 32
zu Aufgabe 4:
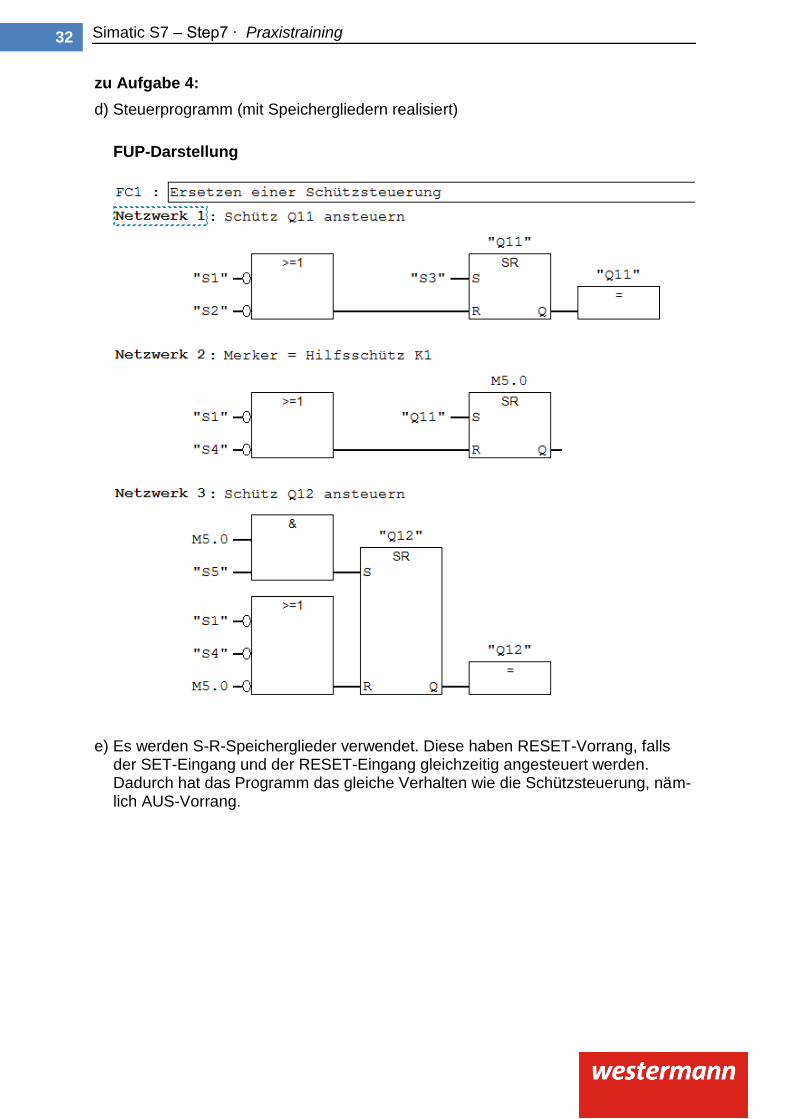
d) Steuerprogramm (mit Speichergliedern realisiert)
FUP-Darstellung
e) Es werden S-R-Speicherglieder verwendet. Diese haben RESET-Vorrang, falls der SET-Eingang und der RESET-Eingang gleichzeitig angesteuert werden. Dadurch hat das Programm das gleiche Verhalten wie die Schützsteuerung, näm-lich AUS-Vorrang.
33 Simatic S7 – Step7 ∙ Praxistraining
Kapitel 12.4 Seite 94
Aufgabe 1: Timeranschlüsse
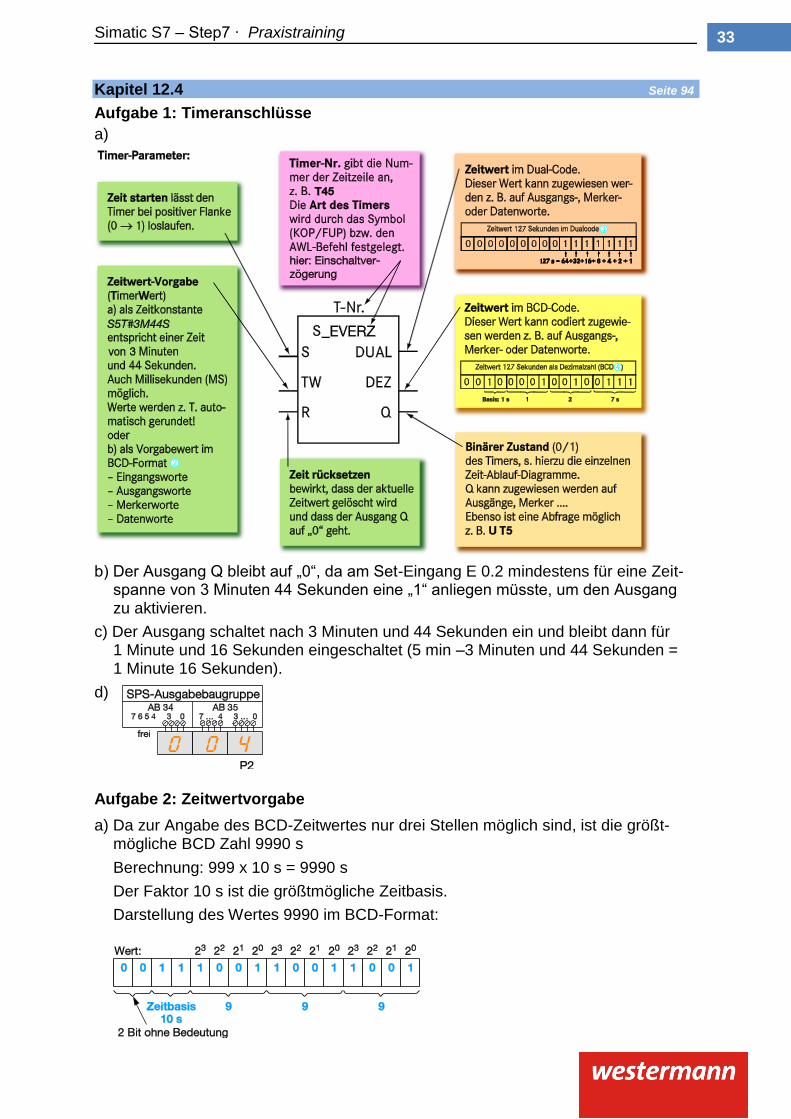
a)
b) Der Ausgang Q bleibt auf „0“, da am Set-Eingang E 0.2 mindestens für eine Zeit-spanne von 3 Minuten 44 Sekunden eine „1“ anliegen müsste, um den Ausgang zu aktivieren.
c) Der Ausgang schaltet nach 3 Minuten und 44 Sekunden ein und bleibt dann für 1 Minute und 16 Sekunden eingeschaltet (5 min –3 Minuten und 44 Sekunden = 1 Minute 16 Sekunden).
d)
Aufgabe 2: Zeitwertvorgabe
a) Da zur Angabe des BCD-Zeitwertes nur drei Stellen möglich sind, ist die größt-mögliche BCD Zahl 9990 s
Berechnung: 999 x 10 s = 9990 s
Der Faktor 10 s ist die größtmögliche Zeitbasis.
Darstellung des Wertes 9990 im BCD-Format:
Simatic S7 – Step7 ∙ Praxistraining 34
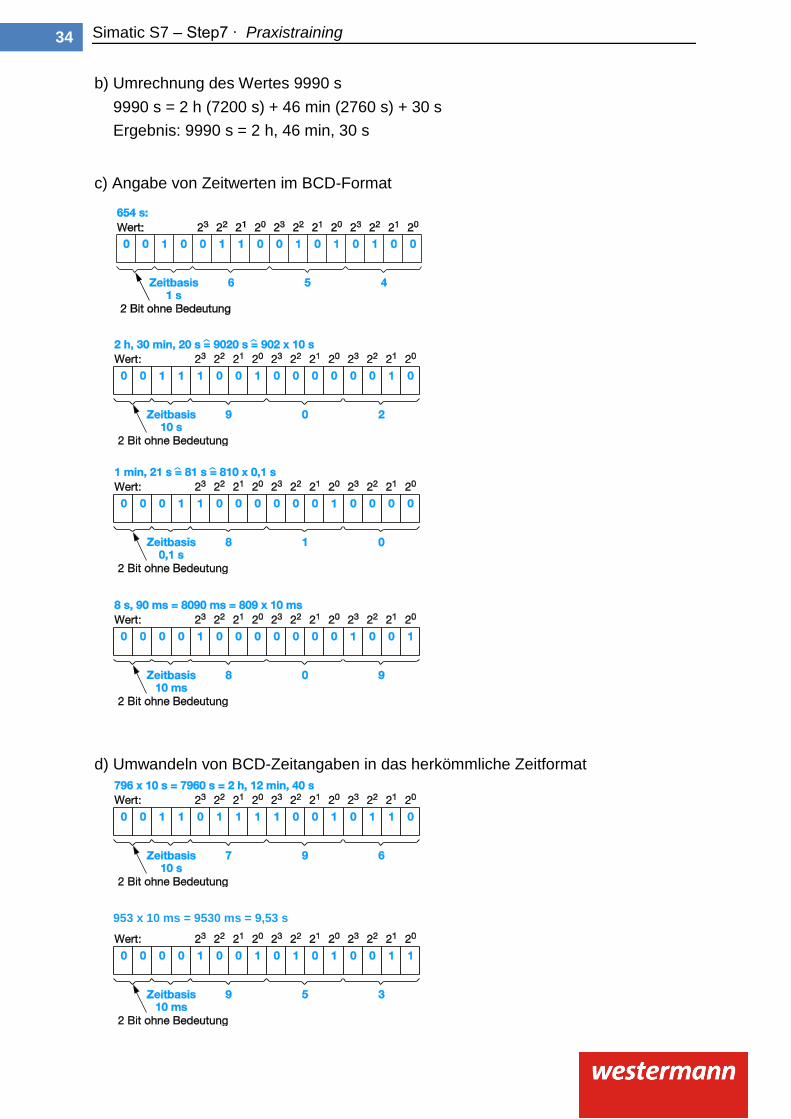
b) Umrechnung des Wertes 9990 s
9990 s = 2 h (7200 s) + 46 min (2760 s) + 30 s
Ergebnis: 9990 s = 2 h, 46 min, 30 s
c) Angabe von Zeitwerten im BCD-Format
d) Umwandeln von BCD-Zeitangaben in das herkömmliche Zeitformat
953 x 10 ms = 9530 ms = 9,53 s
35 Simatic S7 – Step7 ∙ Praxistraining
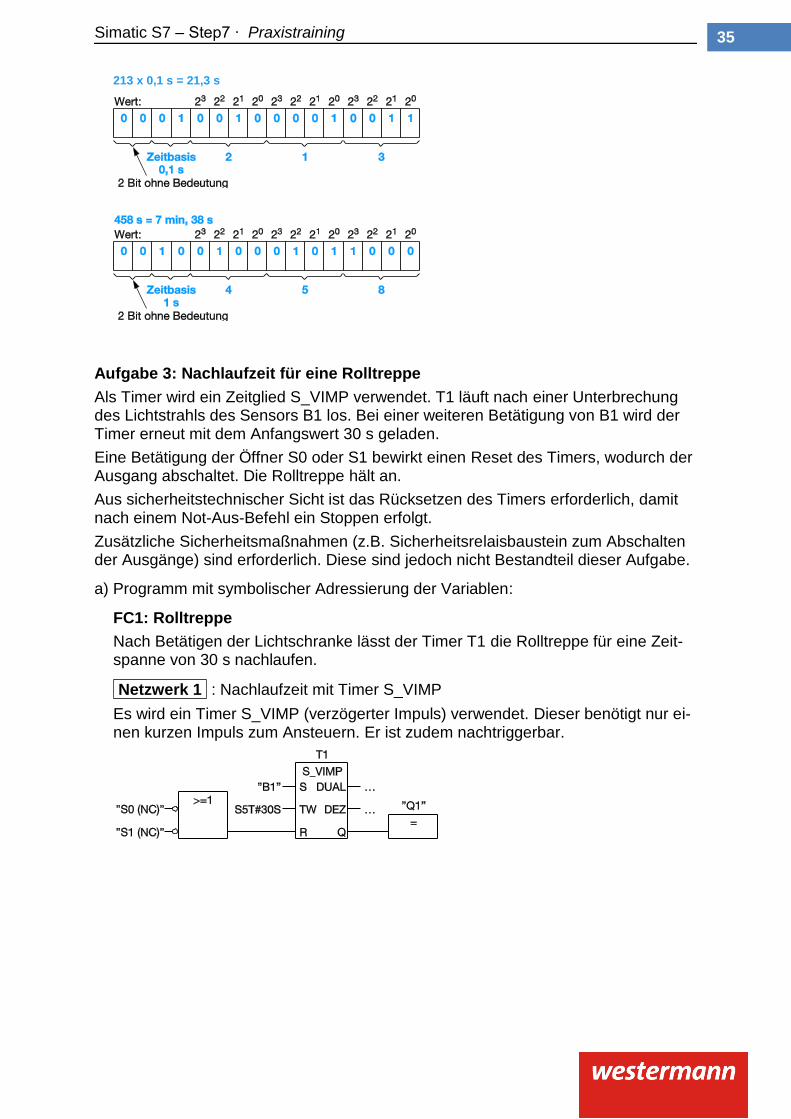
213 x 0,1 s = 21,3 s
Aufgabe 3: Nachlaufzeit für eine Rolltreppe
Als Timer wird ein Zeitglied S_VIMP verwendet. T1 läuft nach einer Unterbrechung des Lichtstrahls des Sensors B1 los. Bei einer weiteren Betätigung von B1 wird der Timer erneut mit dem Anfangswert 30 s geladen.
Eine Betätigung der Öffner S0 oder S1 bewirkt einen Reset des Timers, wodurch der Ausgang abschaltet. Die Rolltreppe hält an.
Aus sicherheitstechnischer Sicht ist das Rücksetzen des Timers erforderlich, damit nach einem Not-Aus-Befehl ein Stoppen erfolgt.
Zusätzliche Sicherheitsmaßnahmen (z.B. Sicherheitsrelaisbaustein zum Abschalten der Ausgänge) sind erforderlich. Diese sind jedoch nicht Bestandteil dieser Aufgabe.
a) Programm mit symbolischer Adressierung der Variablen:
FC1: Rolltreppe
Nach Betätigen der Lichtschranke lässt der Timer T1 die Rolltreppe für eine Zeit-spanne von 30 s nachlaufen.
Netzwerk 1 : Nachlaufzeit mit Timer S_VIMP
Es wird ein Timer S_VIMP (verzögerter Impuls) verwendet. Dieser benötigt nur ei-nen kurzen Impuls zum Ansteuern. Er ist zudem nachtriggerbar.
Simatic S7 – Step7 ∙ Praxistraining 36
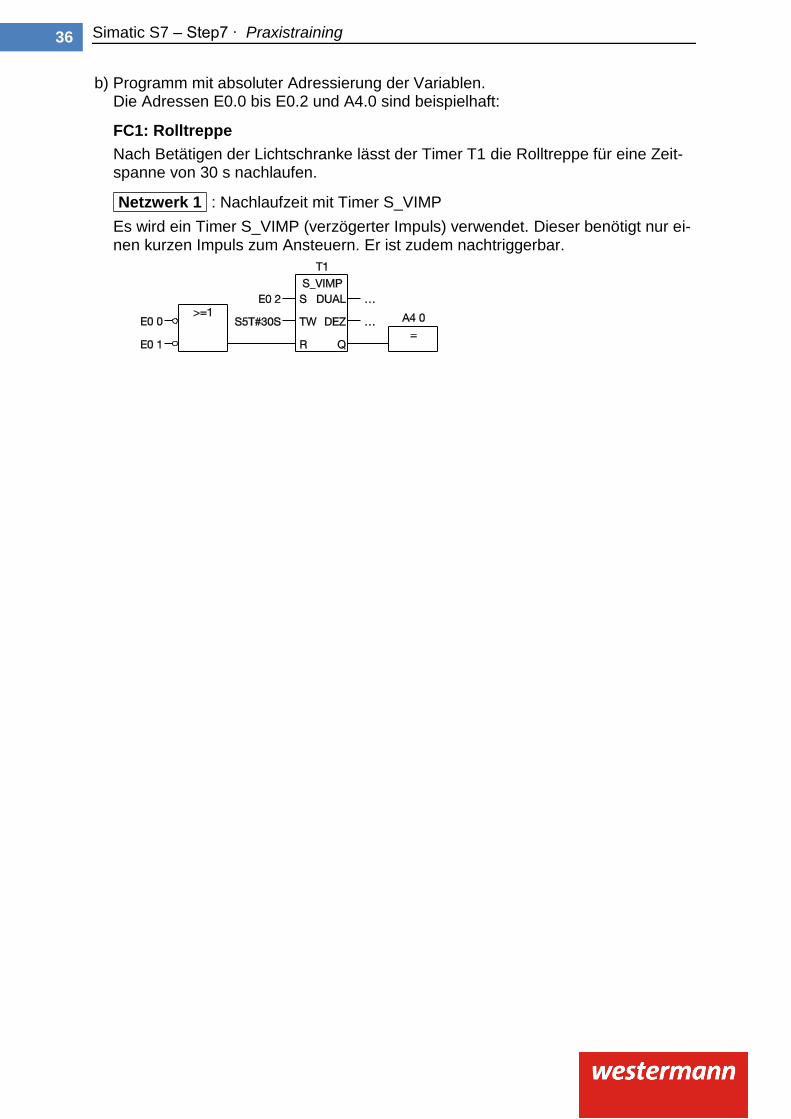
b) Programm mit absoluter Adressierung der Variablen. Die Adressen E0.0 bis E0.2 und A4.0 sind beispielhaft:
FC1: Rolltreppe
Nach Betätigen der Lichtschranke lässt der Timer T1 die Rolltreppe für eine Zeit-spanne von 30 s nachlaufen.
Netzwerk 1 : Nachlaufzeit mit Timer S_VIMP
Es wird ein Timer S_VIMP (verzögerter Impuls) verwendet. Dieser benötigt nur ei-nen kurzen Impuls zum Ansteuern. Er ist zudem nachtriggerbar.
37 Simatic S7 – Step7 ∙ Praxistraining
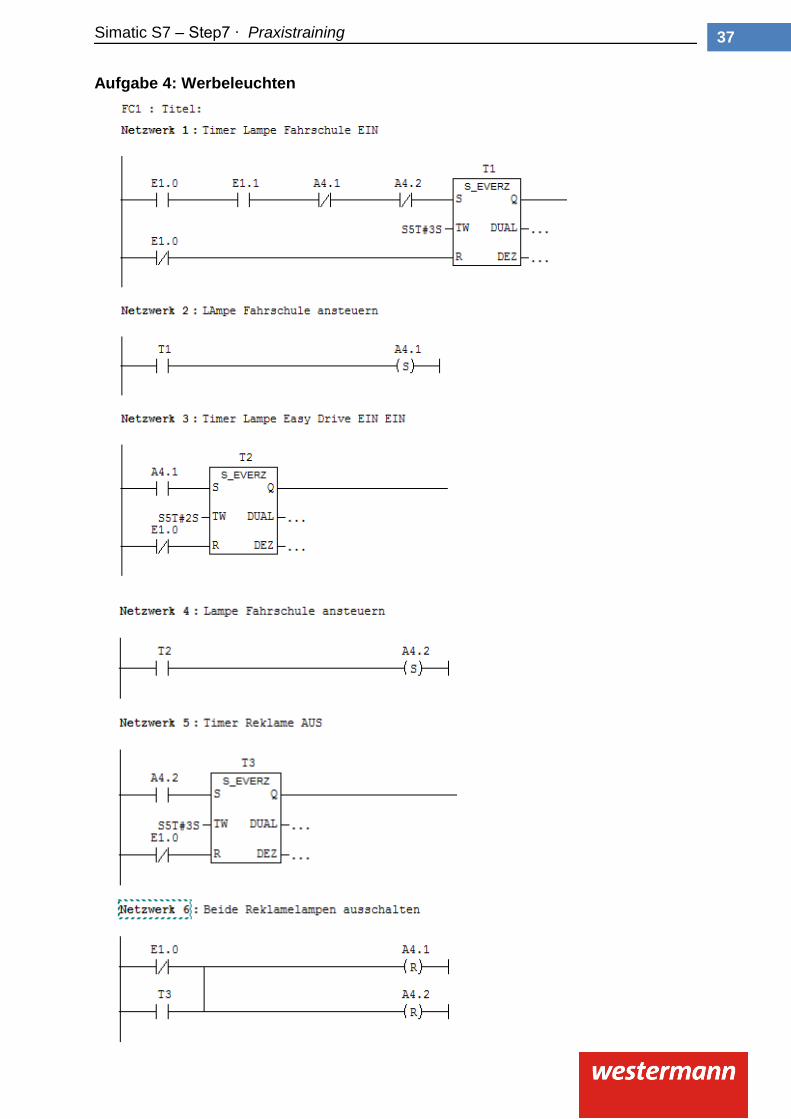
Aufgabe 4: Werbeleuchten
Simatic S7 – Step7 ∙ Praxistraining 38
Kapitel 12.4 Seite 95
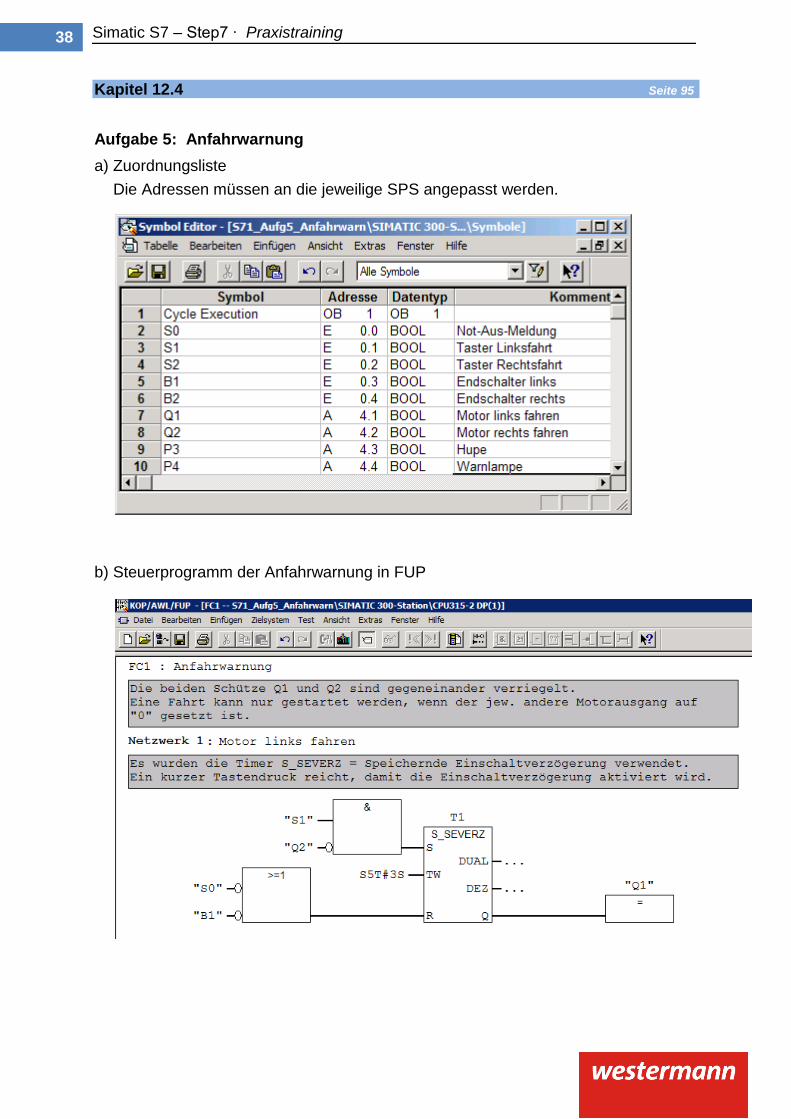
Aufgabe 5: Anfahrwarnung
a) Zuordnungsliste
Die Adressen müssen an die jeweilige SPS angepasst werden.
b) Steuerprogramm der Anfahrwarnung in FUP
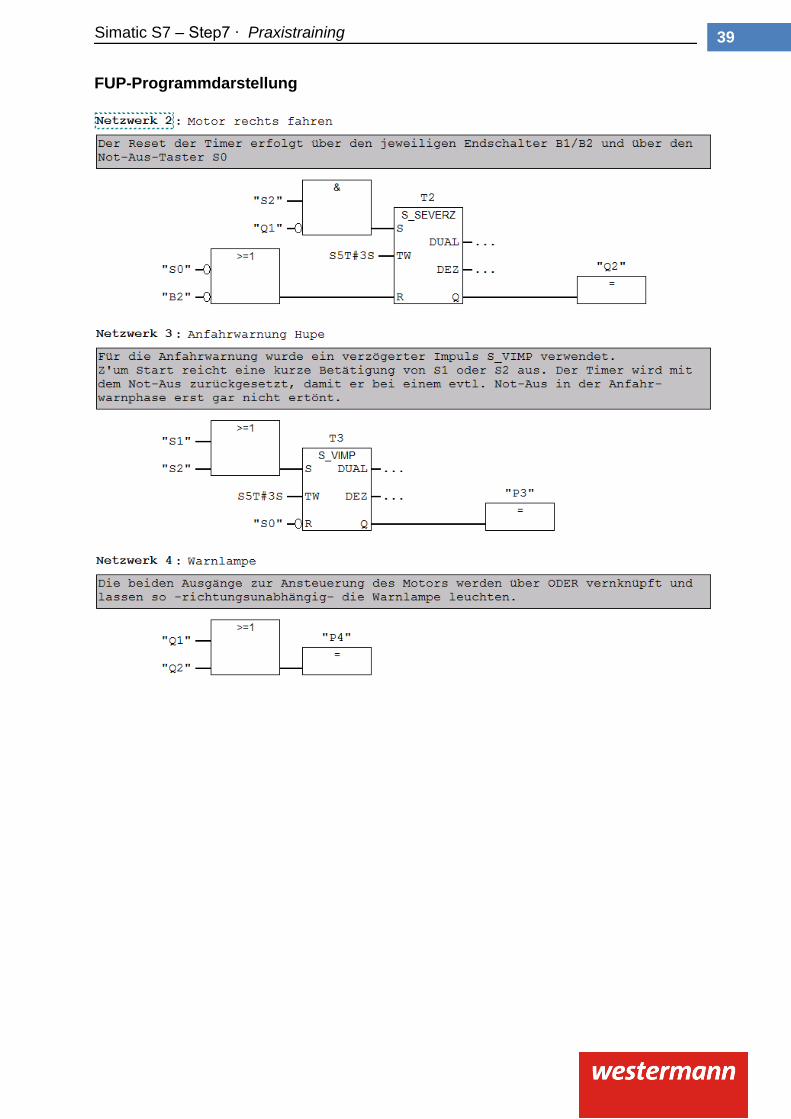
39 Simatic S7 – Step7 ∙ Praxistraining
FUP-Programmdarstellung
Simatic S7 – Step7 ∙ Praxistraining 40
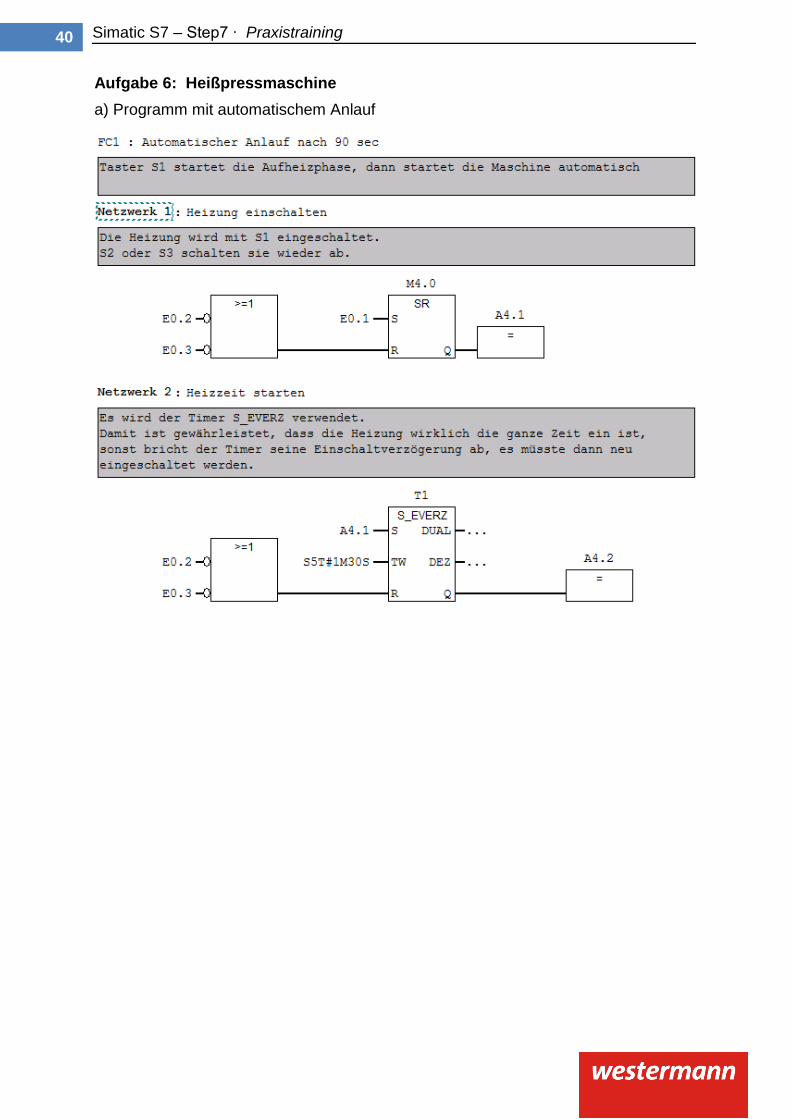
Aufgabe 6: Heißpressmaschine
a) Programm mit automatischem Anlauf
41 Simatic S7 – Step7 ∙ Praxistraining
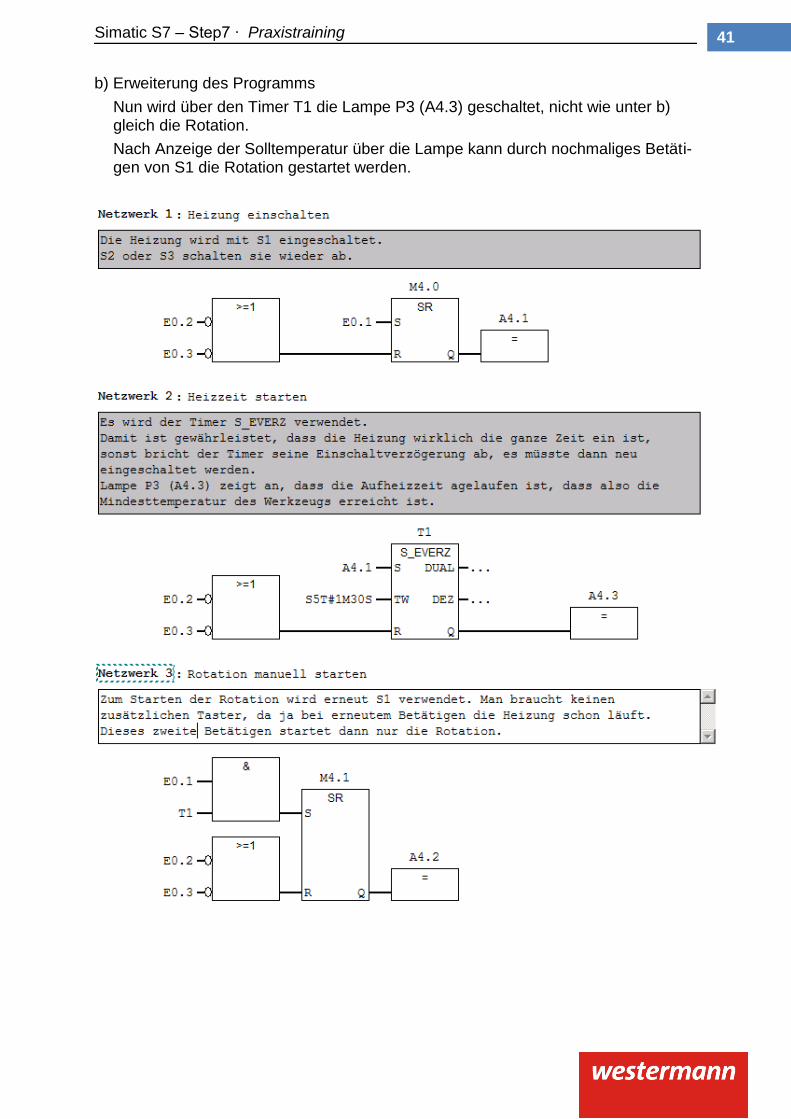
b) Erweiterung des Programms
Nun wird über den Timer T1 die Lampe P3 (A4.3) geschaltet, nicht wie unter b) gleich die Rotation.
Nach Anzeige der Solltemperatur über die Lampe kann durch nochmaliges Betäti-gen von S1 die Rotation gestartet werden.
Simatic S7 – Step7 ∙ Praxistraining 42
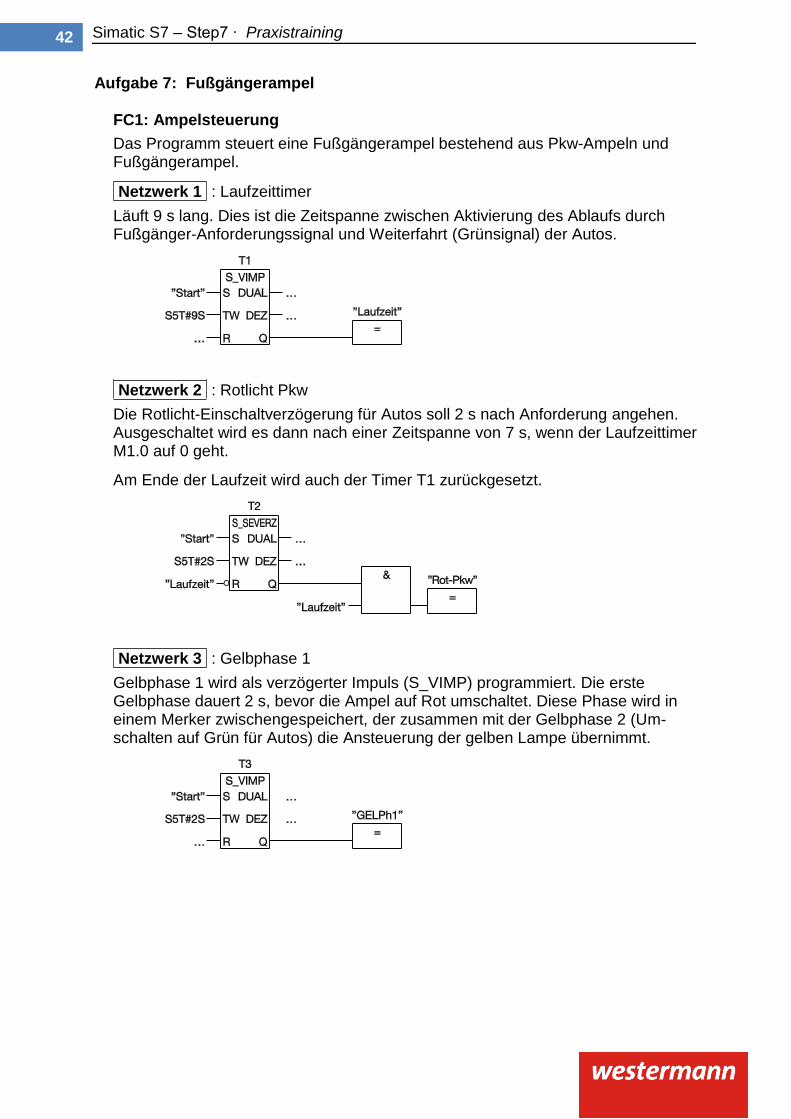
Aufgabe 7: Fußgängerampel
FC1: Ampelsteuerung
Das Programm steuert eine Fußgängerampel bestehend aus Pkw-Ampeln und Fußgängerampel.
Netzwerk 1 : Laufzeittimer
Läuft 9 s lang. Dies ist die Zeitspanne zwischen Aktivierung des Ablaufs durch Fußgänger-Anforderungssignal und Weiterfahrt (Grünsignal) der Autos.
Netzwerk 2 : Rotlicht Pkw
Die Rotlicht-Einschaltverzögerung für Autos soll 2 s nach Anforderung angehen. Ausgeschaltet wird es dann nach einer Zeitspanne von 7 s, wenn der Laufzeittimer M1.0 auf 0 geht.
Am Ende der Laufzeit wird auch der Timer T1 zurückgesetzt.
Netzwerk 3 : Gelbphase 1
Gelbphase 1 wird als verzögerter Impuls (S_VIMP) programmiert. Die erste Gelbphase dauert 2 s, bevor die Ampel auf Rot umschaltet. Diese Phase wird in einem Merker zwischengespeichert, der zusammen mit der Gelbphase 2 (Um-schalten auf Grün für Autos) die Ansteuerung der gelben Lampe übernimmt.
43 Simatic S7 – Step7 ∙ Praxistraining
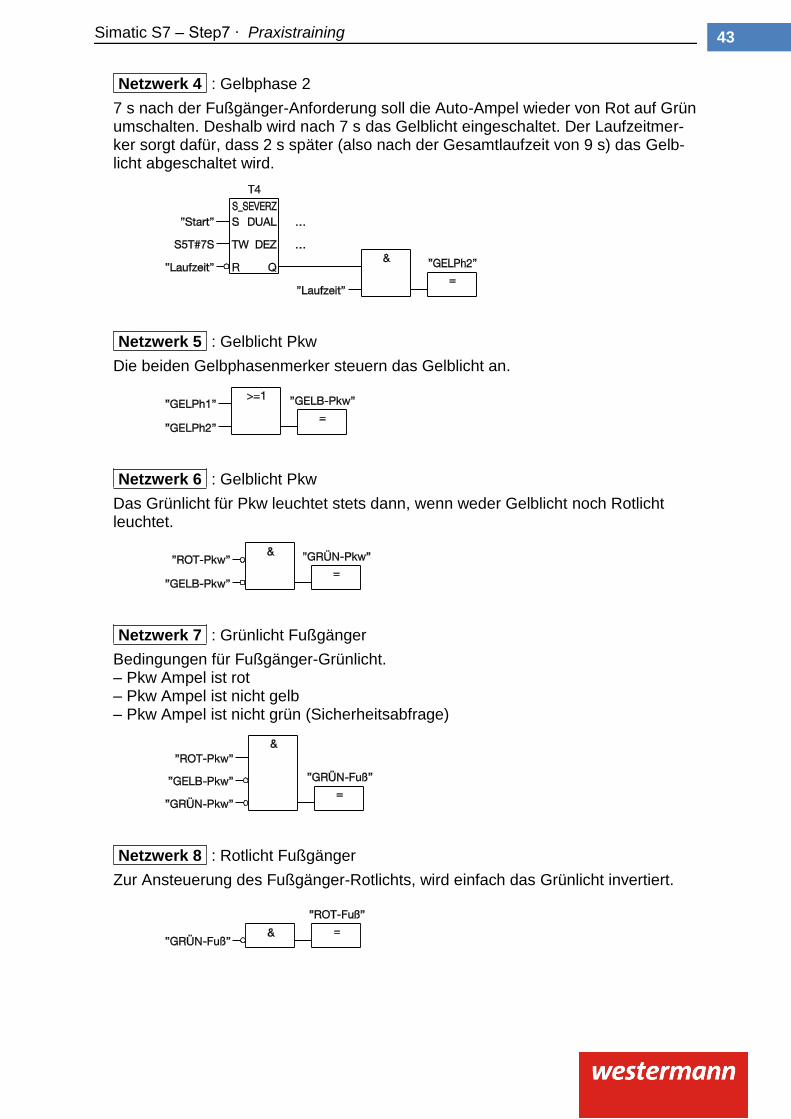
Netzwerk 4 : Gelbphase 2
7 s nach der Fußgänger-Anforderung soll die Auto-Ampel wieder von Rot auf Grün umschalten. Deshalb wird nach 7 s das Gelblicht eingeschaltet. Der Laufzeitmer-ker sorgt dafür, dass 2 s später (also nach der Gesamtlaufzeit von 9 s) das Gelb-licht abgeschaltet wird.
Netzwerk 5 : Gelblicht Pkw
Die beiden Gelbphasenmerker steuern das Gelblicht an.
Netzwerk 6 : Gelblicht Pkw
Das Grünlicht für Pkw leuchtet stets dann, wenn weder Gelblicht noch Rotlicht leuchtet.
Netzwerk 7 : Grünlicht Fußgänger
Bedingungen für Fußgänger-Grünlicht. – Pkw Ampel ist rot – Pkw Ampel ist nicht gelb – Pkw Ampel ist nicht grün (Sicherheitsabfrage)
Netzwerk 8 : Rotlicht Fußgänger
Zur Ansteuerung des Fußgänger-Rotlichts, wird einfach das Grünlicht invertiert.
Simatic S7 – Step7 ∙ Praxistraining 44
Kapitel 12.5 Seite 96
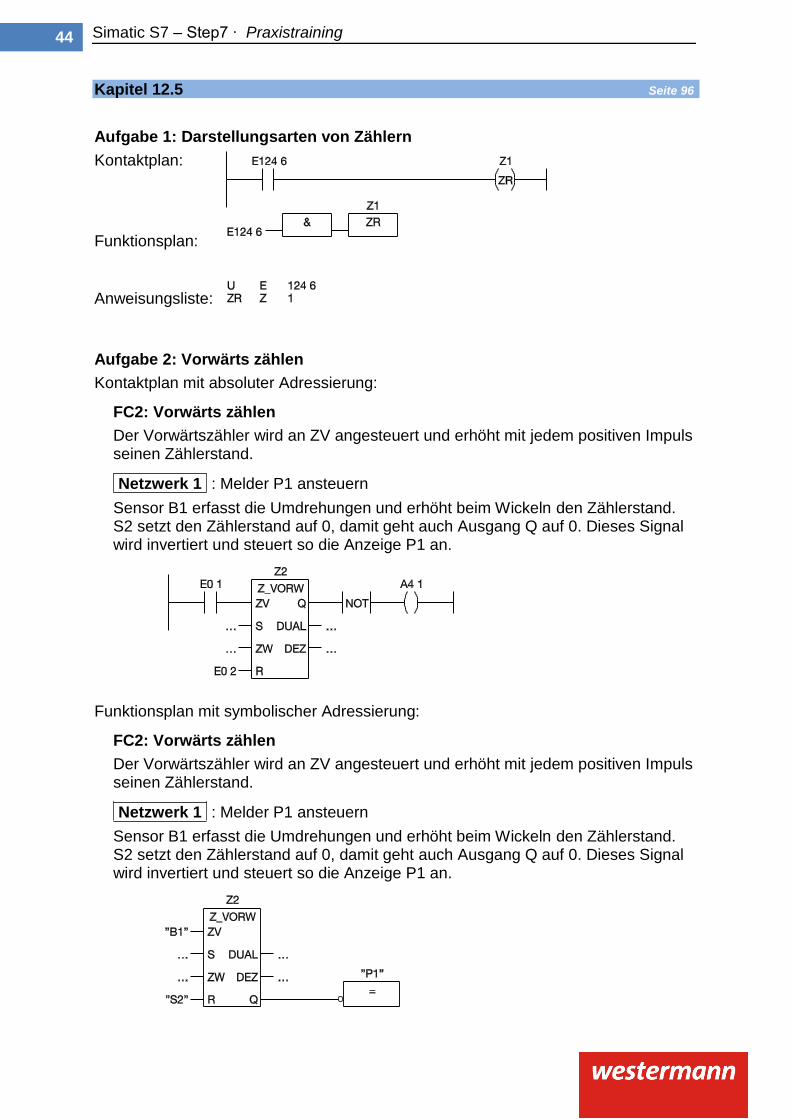
Aufgabe 1: Darstellungsarten von Zählern
Kontaktplan:
Funktionsplan:
Anweisungsliste:
Aufgabe 2: Vorwärts zählen
Kontaktplan mit absoluter Adressierung:
FC2: Vorwärts zählen
Der Vorwärtszähler wird an ZV angesteuert und erhöht mit jedem positiven Impuls seinen Zählerstand.
Netzwerk 1 : Melder P1 ansteuern
Sensor B1 erfasst die Umdrehungen und erhöht beim Wickeln den Zählerstand. S2 setzt den Zählerstand auf 0, damit geht auch Ausgang Q auf 0. Dieses Signal wird invertiert und steuert so die Anzeige P1 an.
Funktionsplan mit symbolischer Adressierung:
FC2: Vorwärts zählen
Der Vorwärtszähler wird an ZV angesteuert und erhöht mit jedem positiven Impuls seinen Zählerstand.
Netzwerk 1 : Melder P1 ansteuern
Sensor B1 erfasst die Umdrehungen und erhöht beim Wickeln den Zählerstand. S2 setzt den Zählerstand auf 0, damit geht auch Ausgang Q auf 0. Dieses Signal wird invertiert und steuert so die Anzeige P1 an.
45 Simatic S7 – Step7 ∙ Praxistraining
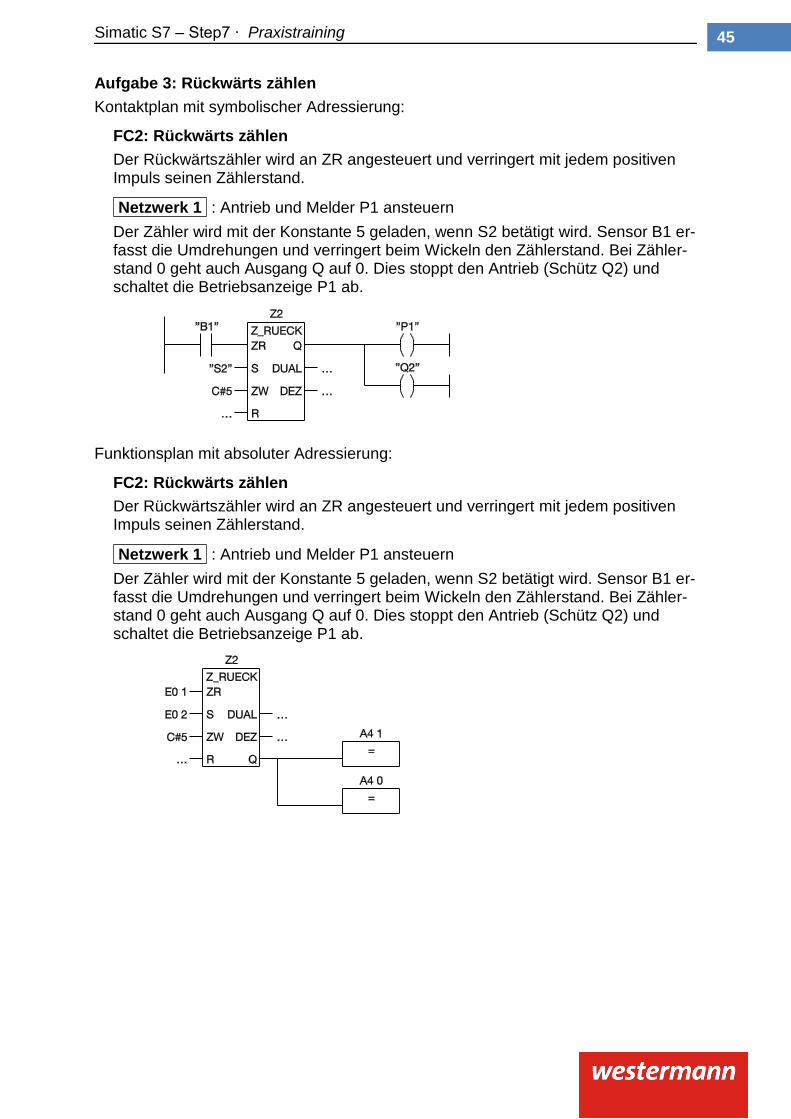
Aufgabe 3: Rückwärts zählen
Kontaktplan mit symbolischer Adressierung:
FC2: Rückwärts zählen
Der Rückwärtszähler wird an ZR angesteuert und verringert mit jedem positiven Impuls seinen Zählerstand.
Netzwerk 1 : Antrieb und Melder P1 ansteuern
Der Zähler wird mit der Konstante 5 geladen, wenn S2 betätigt wird. Sensor B1 er-fasst die Umdrehungen und verringert beim Wickeln den Zählerstand. Bei Zähler-stand 0 geht auch Ausgang Q auf 0. Dies stoppt den Antrieb (Schütz Q2) und schaltet die Betriebsanzeige P1 ab.
Funktionsplan mit absoluter Adressierung:
FC2: Rückwärts zählen
Der Rückwärtszähler wird an ZR angesteuert und verringert mit jedem positiven Impuls seinen Zählerstand.
Netzwerk 1 : Antrieb und Melder P1 ansteuern
Der Zähler wird mit der Konstante 5 geladen, wenn S2 betätigt wird. Sensor B1 er-fasst die Umdrehungen und verringert beim Wickeln den Zählerstand. Bei Zähler-stand 0 geht auch Ausgang Q auf 0. Dies stoppt den Antrieb (Schütz Q2) und schaltet die Betriebsanzeige P1 ab.
Simatic S7 – Step7 ∙ Praxistraining 46
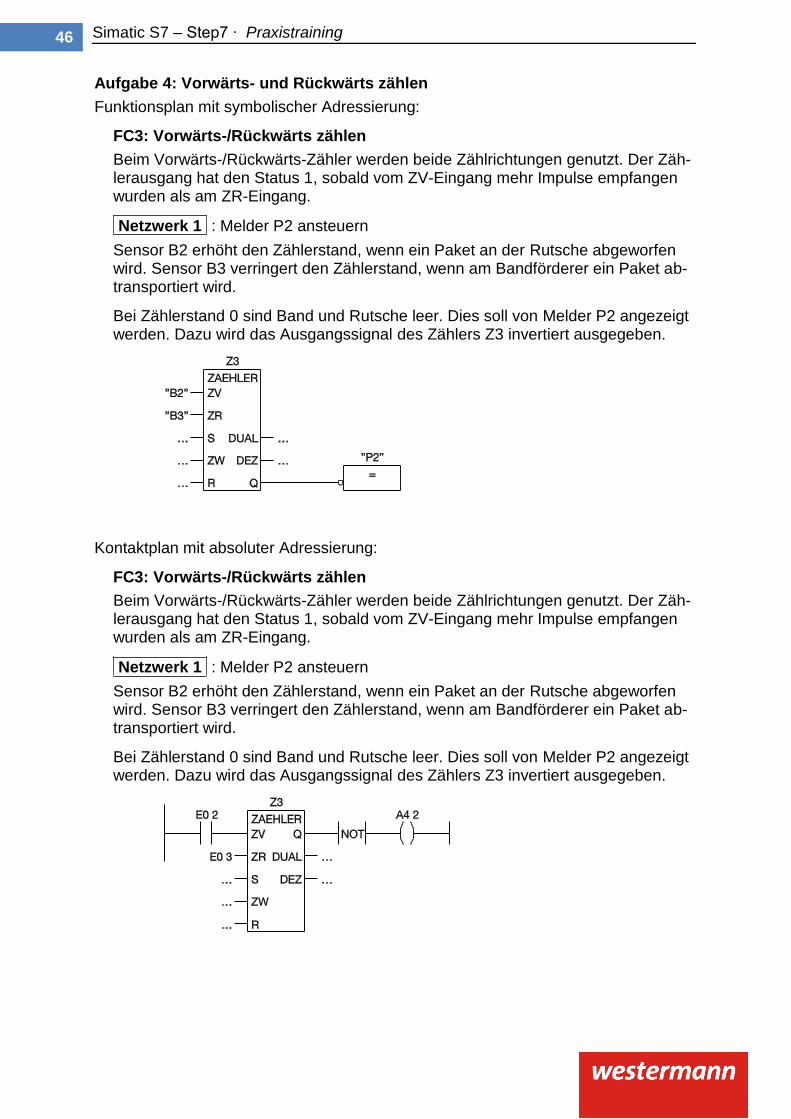
Aufgabe 4: Vorwärts- und Rückwärts zählen
Funktionsplan mit symbolischer Adressierung:
FC3: Vorwärts-/Rückwärts zählen
Beim Vorwärts-/Rückwärts-Zähler werden beide Zählrichtungen genutzt. Der Zäh-lerausgang hat den Status 1, sobald vom ZV-Eingang mehr Impulse empfangen wurden als am ZR-Eingang.
Netzwerk 1 : Melder P2 ansteuern
Sensor B2 erhöht den Zählerstand, wenn ein Paket an der Rutsche abgeworfen wird. Sensor B3 verringert den Zählerstand, wenn am Bandförderer ein Paket ab-transportiert wird.
Bei Zählerstand 0 sind Band und Rutsche leer. Dies soll von Melder P2 angezeigt werden. Dazu wird das Ausgangssignal des Zählers Z3 invertiert ausgegeben.
Kontaktplan mit absoluter Adressierung:
FC3: Vorwärts-/Rückwärts zählen
Beim Vorwärts-/Rückwärts-Zähler werden beide Zählrichtungen genutzt. Der Zäh-lerausgang hat den Status 1, sobald vom ZV-Eingang mehr Impulse empfangen wurden als am ZR-Eingang.
Netzwerk 1 : Melder P2 ansteuern
Sensor B2 erhöht den Zählerstand, wenn ein Paket an der Rutsche abgeworfen wird. Sensor B3 verringert den Zählerstand, wenn am Bandförderer ein Paket ab-transportiert wird.
Bei Zählerstand 0 sind Band und Rutsche leer. Dies soll von Melder P2 angezeigt werden. Dazu wird das Ausgangssignal des Zählers Z3 invertiert ausgegeben.
47 Simatic S7 – Step7 ∙ Praxistraining
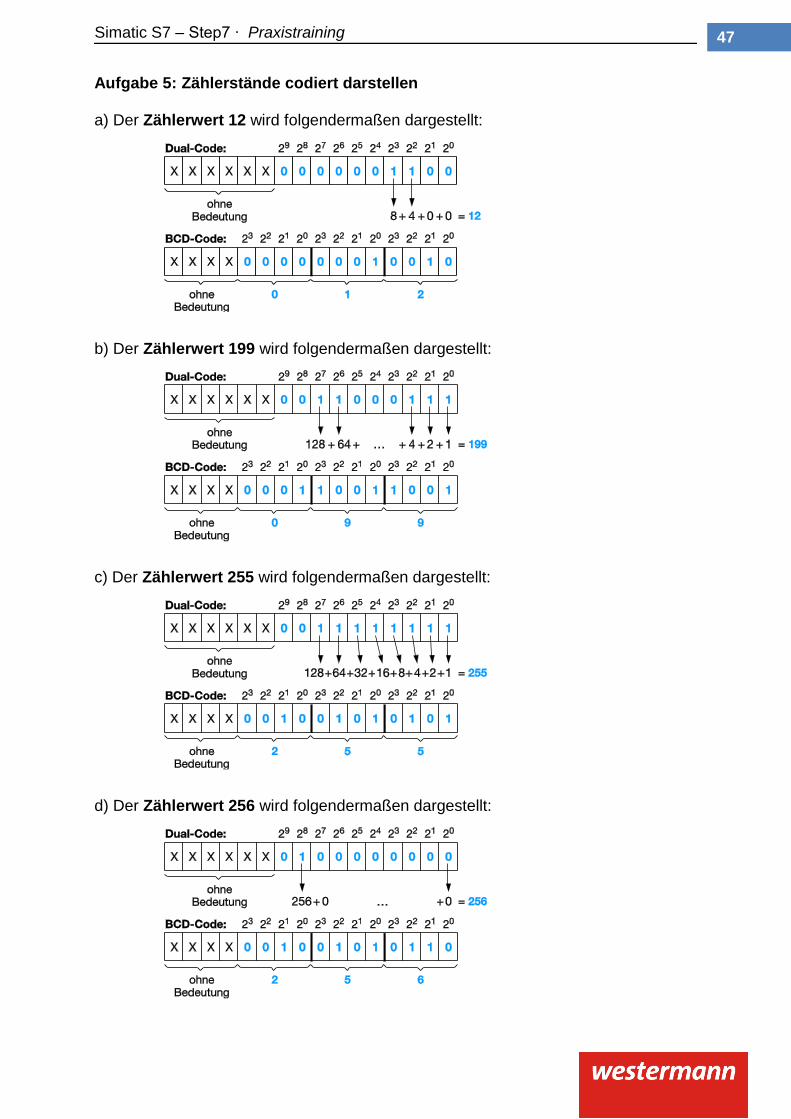
Aufgabe 5: Zählerstände codiert darstellen
a) Der Zählerwert 12 wird folgendermaßen dargestellt:
b) Der Zählerwert 199 wird folgendermaßen dargestellt:
c) Der Zählerwert 255 wird folgendermaßen dargestellt:
d) Der Zählerwert 256 wird folgendermaßen dargestellt:
Simatic S7 – Step7 ∙ Praxistraining 48
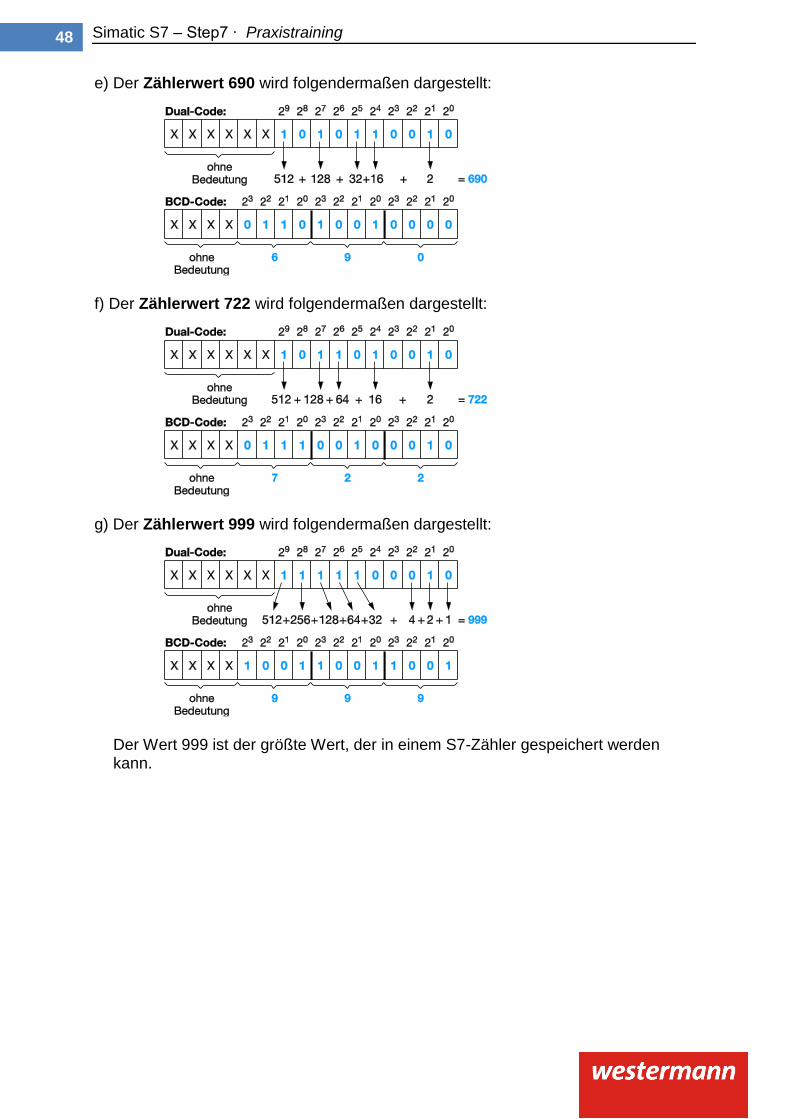
e) Der Zählerwert 690 wird folgendermaßen dargestellt:
f) Der Zählerwert 722 wird folgendermaßen dargestellt:
g) Der Zählerwert 999 wird folgendermaßen dargestellt:
Der Wert 999 ist der größte Wert, der in einem S7-Zähler gespeichert werden kann.
49 Simatic S7 – Step7 ∙ Praxistraining
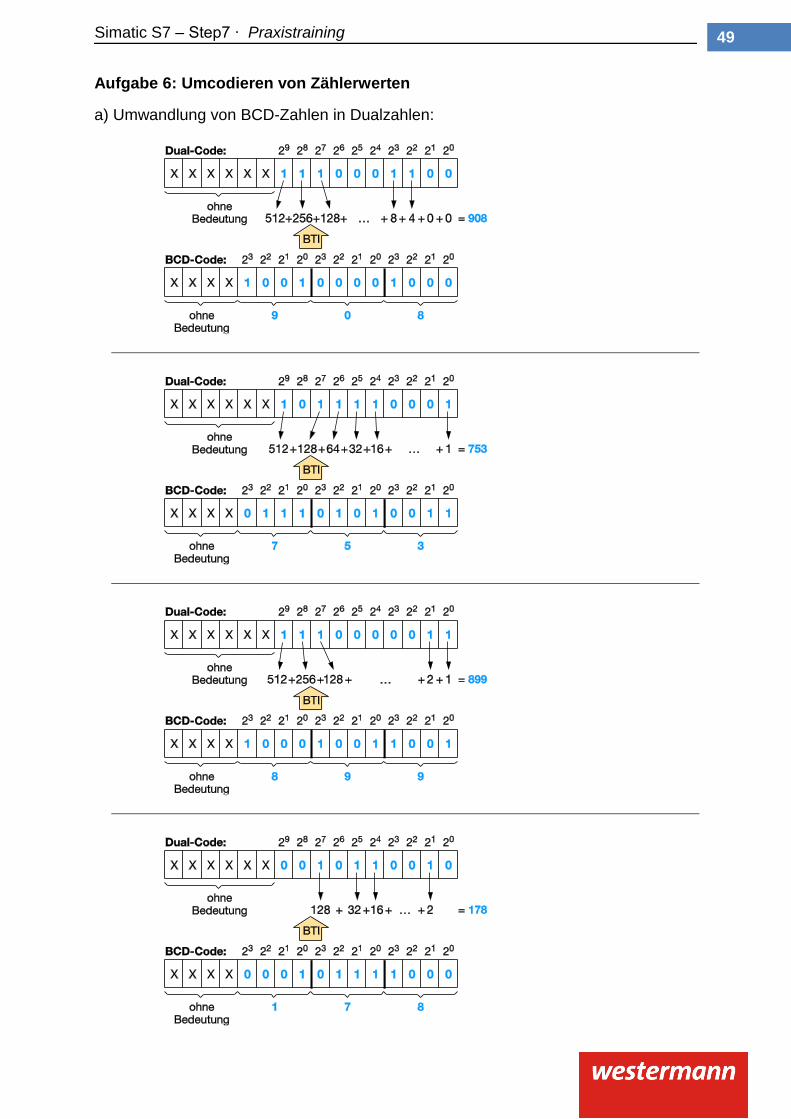
Aufgabe 6: Umcodieren von Zählerwerten
a) Umwandlung von BCD-Zahlen in Dualzahlen:
Simatic S7 – Step7 ∙ Praxistraining 50
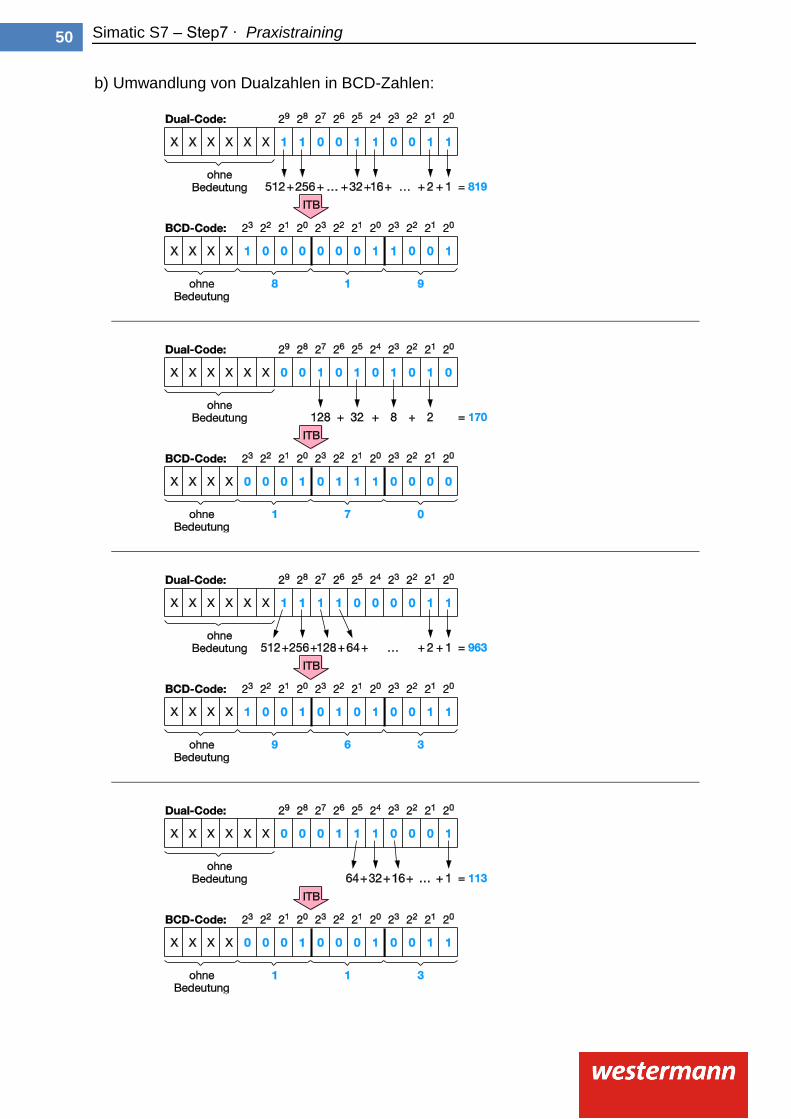
b) Umwandlung von Dualzahlen in BCD-Zahlen:
51 Simatic S7 – Step7 ∙ Praxistraining
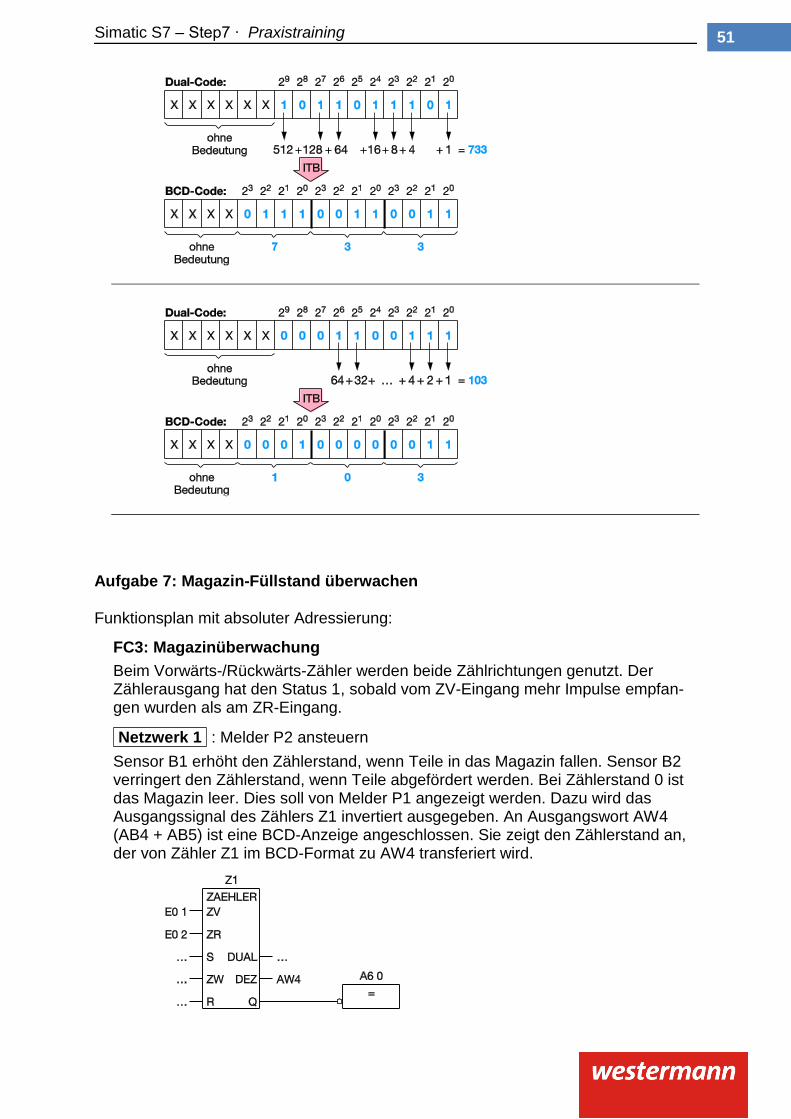
Aufgabe 7: Magazin-Füllstand überwachen
Funktionsplan mit absoluter Adressierung:
FC3: Magazinüberwachung
Beim Vorwärts-/Rückwärts-Zähler werden beide Zählrichtungen genutzt. Der Zählerausgang hat den Status 1, sobald vom ZV-Eingang mehr Impulse empfan-gen wurden als am ZR-Eingang.
Netzwerk 1 : Melder P2 ansteuern
Sensor B1 erhöht den Zählerstand, wenn Teile in das Magazin fallen. Sensor B2 verringert den Zählerstand, wenn Teile abgefördert werden. Bei Zählerstand 0 ist das Magazin leer. Dies soll von Melder P1 angezeigt werden. Dazu wird das Ausgangssignal des Zählers Z1 invertiert ausgegeben. An Ausgangswort AW4 (AB4 + AB5) ist eine BCD-Anzeige angeschlossen. Sie zeigt den Zählerstand an, der von Zähler Z1 im BCD-Format zu AW4 transferiert wird.
Simatic S7 – Step7 ∙ Praxistraining 52
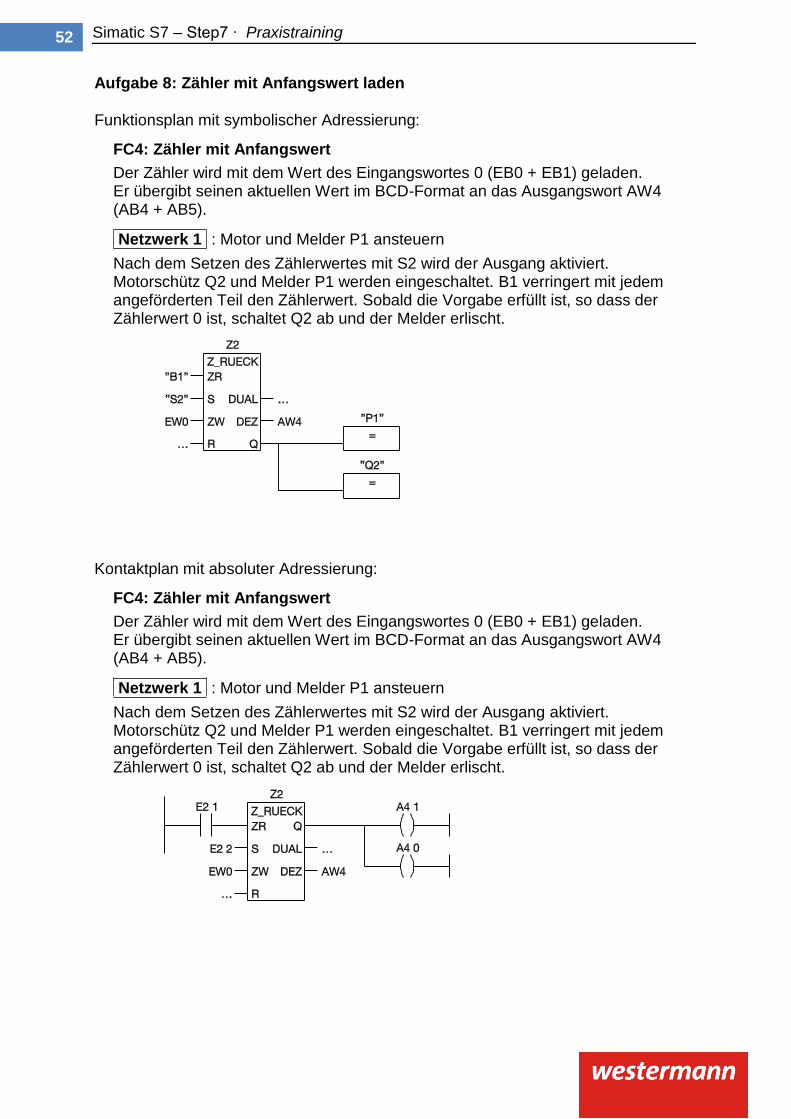
Aufgabe 8: Zähler mit Anfangswert laden
Funktionsplan mit symbolischer Adressierung:
FC4: Zähler mit Anfangswert
Der Zähler wird mit dem Wert des Eingangswortes 0 (EB0 + EB1) geladen. Er übergibt seinen aktuellen Wert im BCD-Format an das Ausgangswort AW4 (AB4 + AB5).
Netzwerk 1 : Motor und Melder P1 ansteuern
Nach dem Setzen des Zählerwertes mit S2 wird der Ausgang aktiviert. Motorschütz Q2 und Melder P1 werden eingeschaltet. B1 verringert mit jedem angeförderten Teil den Zählerwert. Sobald die Vorgabe erfüllt ist, so dass der Zählerwert 0 ist, schaltet Q2 ab und der Melder erlischt.
Kontaktplan mit absoluter Adressierung:
FC4: Zähler mit Anfangswert
Der Zähler wird mit dem Wert des Eingangswortes 0 (EB0 + EB1) geladen. Er übergibt seinen aktuellen Wert im BCD-Format an das Ausgangswort AW4 (AB4 + AB5).
Netzwerk 1 : Motor und Melder P1 ansteuern
Nach dem Setzen des Zählerwertes mit S2 wird der Ausgang aktiviert. Motorschütz Q2 und Melder P1 werden eingeschaltet. B1 verringert mit jedem angeförderten Teil den Zählerwert. Sobald die Vorgabe erfüllt ist, so dass der Zählerwert 0 ist, schaltet Q2 ab und der Melder erlischt.
53 Simatic S7 – Step7 ∙ Praxistraining
Kapitel 12.6 Seite 98
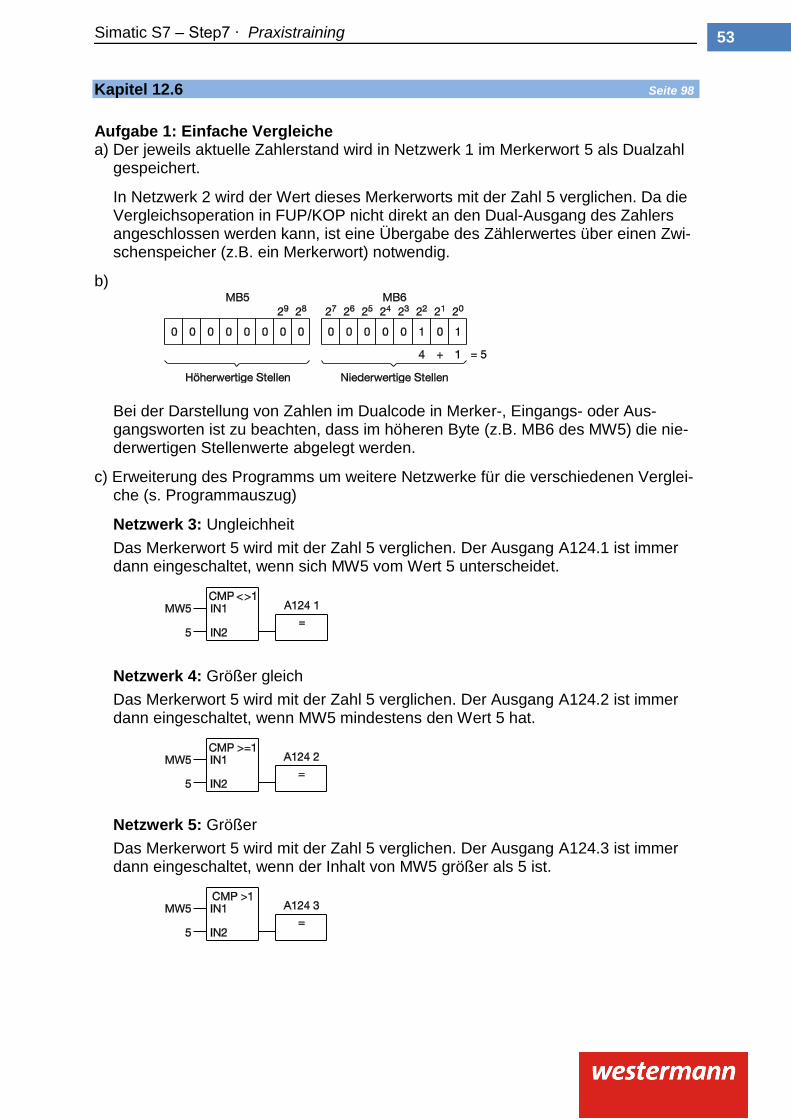
Aufgabe 1: Einfache Vergleiche a) Der jeweils aktuelle Zahlerstand wird in Netzwerk 1 im Merkerwort 5 als Dualzahl
gespeichert.
In Netzwerk 2 wird der Wert dieses Merkerworts mit der Zahl 5 verglichen. Da die Vergleichsoperation in FUP/KOP nicht direkt an den Dual-Ausgang des Zahlers angeschlossen werden kann, ist eine Übergabe des Zählerwertes über einen Zwi-schenspeicher (z.B. ein Merkerwort) notwendig.
b)
Bei der Darstellung von Zahlen im Dualcode in Merker-, Eingangs- oder Aus-gangsworten ist zu beachten, dass im höheren Byte (z.B. MB6 des MW5) die nie-derwertigen Stellenwerte abgelegt werden.
c) Erweiterung des Programms um weitere Netzwerke für die verschiedenen Verglei-che (s. Programmauszug)
Netzwerk 3: Ungleichheit
Das Merkerwort 5 wird mit der Zahl 5 verglichen. Der Ausgang A124.1 ist immer dann eingeschaltet, wenn sich MW5 vom Wert 5 unterscheidet.
Netzwerk 4: Größer gleich
Das Merkerwort 5 wird mit der Zahl 5 verglichen. Der Ausgang A124.2 ist immer dann eingeschaltet, wenn MW5 mindestens den Wert 5 hat.
Netzwerk 5: Größer
Das Merkerwort 5 wird mit der Zahl 5 verglichen. Der Ausgang A124.3 ist immer dann eingeschaltet, wenn der Inhalt von MW5 größer als 5 ist.
Simatic S7 – Step7 ∙ Praxistraining 54
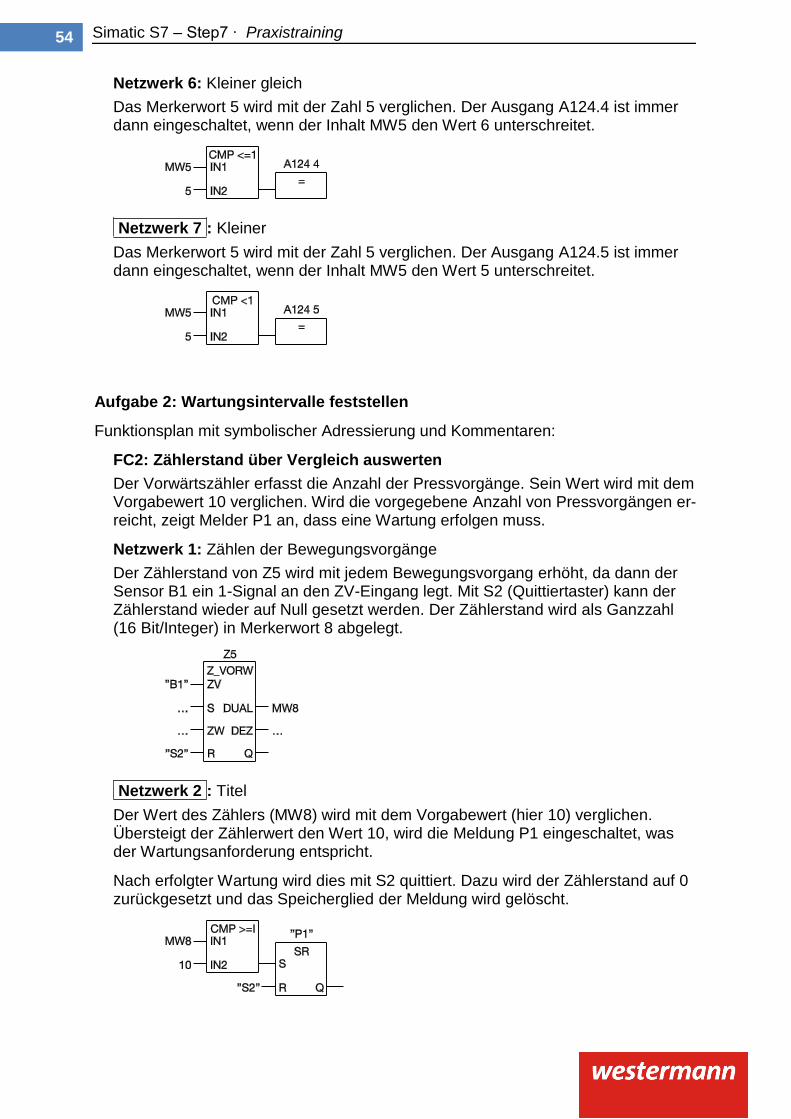
Netzwerk 6: Kleiner gleich
Das Merkerwort 5 wird mit der Zahl 5 verglichen. Der Ausgang A124.4 ist immer dann eingeschaltet, wenn der Inhalt MW5 den Wert 6 unterschreitet.
Netzwerk 7 : Kleiner
Das Merkerwort 5 wird mit der Zahl 5 verglichen. Der Ausgang A124.5 ist immer dann eingeschaltet, wenn der Inhalt MW5 den Wert 5 unterschreitet.
Aufgabe 2: Wartungsintervalle feststellen
Funktionsplan mit symbolischer Adressierung und Kommentaren:
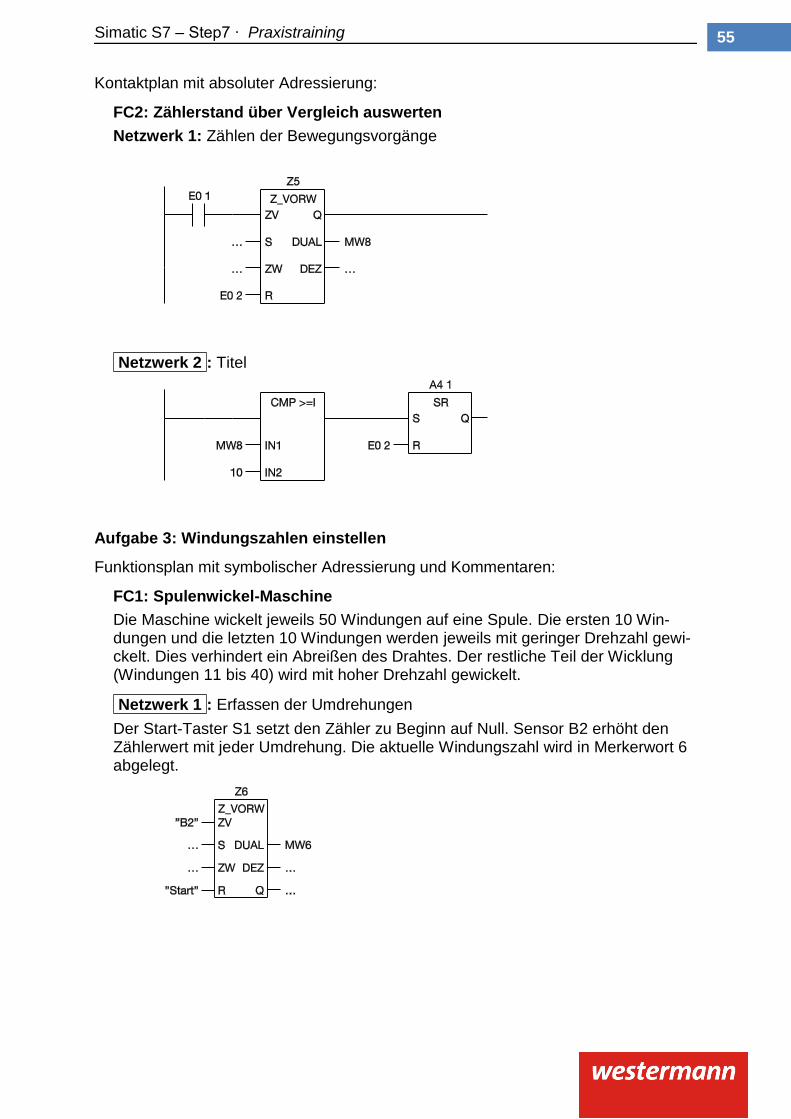
FC2: Zählerstand über Vergleich auswerten
Der Vorwärtszähler erfasst die Anzahl der Pressvorgänge. Sein Wert wird mit dem Vorgabewert 10 verglichen. Wird die vorgegebene Anzahl von Pressvorgängen er-reicht, zeigt Melder P1 an, dass eine Wartung erfolgen muss.
Netzwerk 1: Zählen der Bewegungsvorgänge
Der Zählerstand von Z5 wird mit jedem Bewegungsvorgang erhöht, da dann der Sensor B1 ein 1-Signal an den ZV-Eingang legt. Mit S2 (Quittiertaster) kann der Zählerstand wieder auf Null gesetzt werden. Der Zählerstand wird als Ganzzahl (16 Bit/Integer) in Merkerwort 8 abgelegt.
Netzwerk 2 : Titel
Der Wert des Zählers (MW8) wird mit dem Vorgabewert (hier 10) verglichen. Übersteigt der Zählerwert den Wert 10, wird die Meldung P1 eingeschaltet, was der Wartungsanforderung entspricht.
Nach erfolgter Wartung wird dies mit S2 quittiert. Dazu wird der Zählerstand auf 0 zurückgesetzt und das Speicherglied der Meldung wird gelöscht.
55 Simatic S7 – Step7 ∙ Praxistraining
Kontaktplan mit absoluter Adressierung:
FC2: Zählerstand über Vergleich auswerten
Netzwerk 1: Zählen der Bewegungsvorgänge
Netzwerk 2 : Titel
Aufgabe 3: Windungszahlen einstellen
Funktionsplan mit symbolischer Adressierung und Kommentaren:
FC1: Spulenwickel-Maschine
Die Maschine wickelt jeweils 50 Windungen auf eine Spule. Die ersten 10 Win-dungen und die letzten 10 Windungen werden jeweils mit geringer Drehzahl gewi-ckelt. Dies verhindert ein Abreißen des Drahtes. Der restliche Teil der Wicklung (Windungen 11 bis 40) wird mit hoher Drehzahl gewickelt.
Netzwerk 1 : Erfassen der Umdrehungen
Der Start-Taster S1 setzt den Zähler zu Beginn auf Null. Sensor B2 erhöht den Zählerwert mit jeder Umdrehung. Die aktuelle Windungszahl wird in Merkerwort 6 abgelegt.
Simatic S7 – Step7 ∙ Praxistraining 56
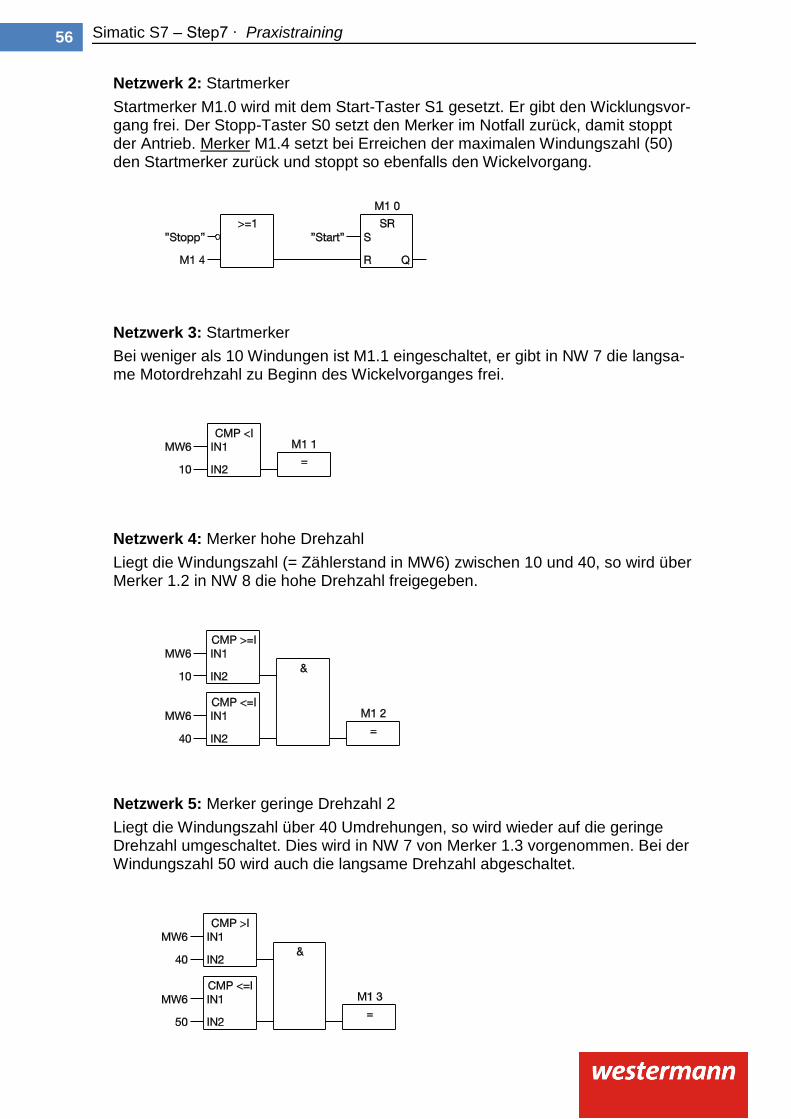
Netzwerk 2: Startmerker
Startmerker M1.0 wird mit dem Start-Taster S1 gesetzt. Er gibt den Wicklungsvor-gang frei. Der Stopp-Taster S0 setzt den Merker im Notfall zurück, damit stoppt der Antrieb. Merker M1.4 setzt bei Erreichen der maximalen Windungszahl (50) den Startmerker zurück und stoppt so ebenfalls den Wickelvorgang.
Netzwerk 3: Startmerker
Bei weniger als 10 Windungen ist M1.1 eingeschaltet, er gibt in NW 7 die langsa-me Motordrehzahl zu Beginn des Wickelvorganges frei.
Netzwerk 4: Merker hohe Drehzahl
Liegt die Windungszahl (= Zählerstand in MW6) zwischen 10 und 40, so wird über Merker 1.2 in NW 8 die hohe Drehzahl freigegeben.
Netzwerk 5: Merker geringe Drehzahl 2
Liegt die Windungszahl über 40 Umdrehungen, so wird wieder auf die geringe Drehzahl umgeschaltet. Dies wird in NW 7 von Merker 1.3 vorgenommen. Bei der Windungszahl 50 wird auch die langsame Drehzahl abgeschaltet.
57 Simatic S7 – Step7 ∙ Praxistraining
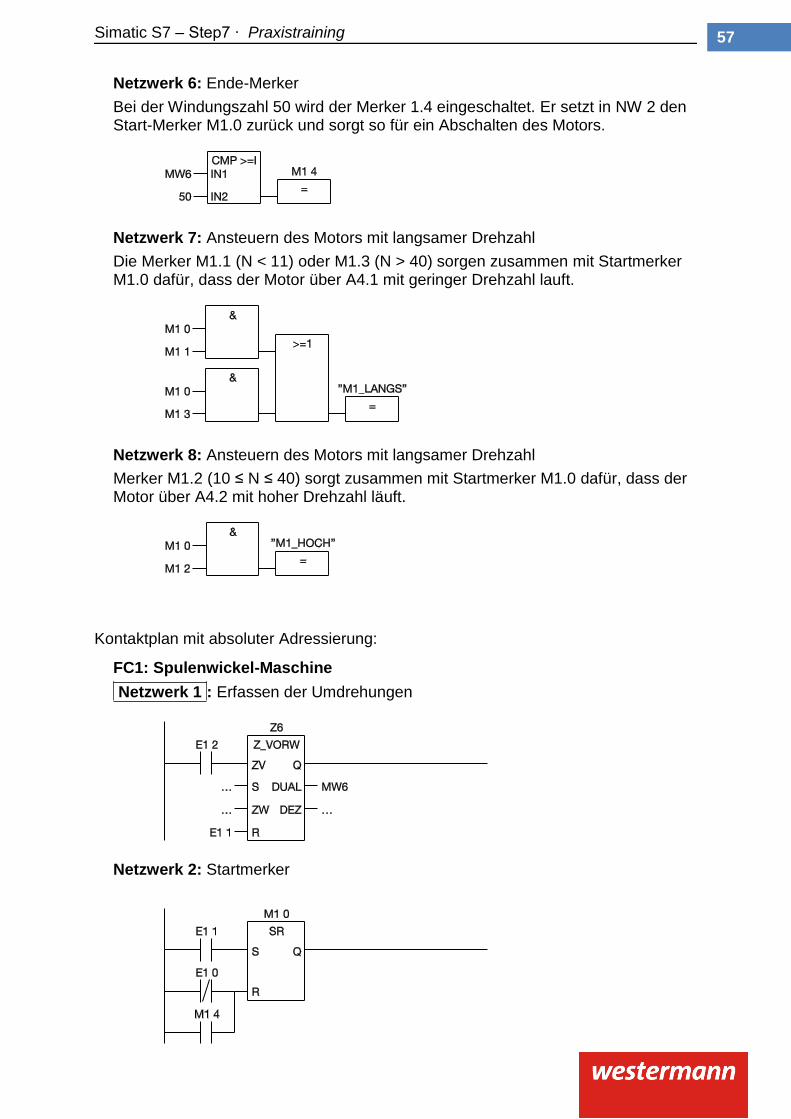
Netzwerk 6: Ende-Merker
Bei der Windungszahl 50 wird der Merker 1.4 eingeschaltet. Er setzt in NW 2 den Start-Merker M1.0 zurück und sorgt so für ein Abschalten des Motors.
Netzwerk 7: Ansteuern des Motors mit langsamer Drehzahl
Die Merker M1.1 (N < 11) oder M1.3 (N > 40) sorgen zusammen mit Startmerker M1.0 dafür, dass der Motor über A4.1 mit geringer Drehzahl lauft.
Netzwerk 8: Ansteuern des Motors mit langsamer Drehzahl
Merker M1.2 (10 ≤ N ≤ 40) sorgt zusammen mit Startmerker M1.0 dafür, dass der Motor über A4.2 mit hoher Drehzahl läuft.
Kontaktplan mit absoluter Adressierung:
FC1: Spulenwickel-Maschine
Netzwerk 1 : Erfassen der Umdrehungen
Netzwerk 2: Startmerker
Simatic S7 – Step7 ∙ Praxistraining 58
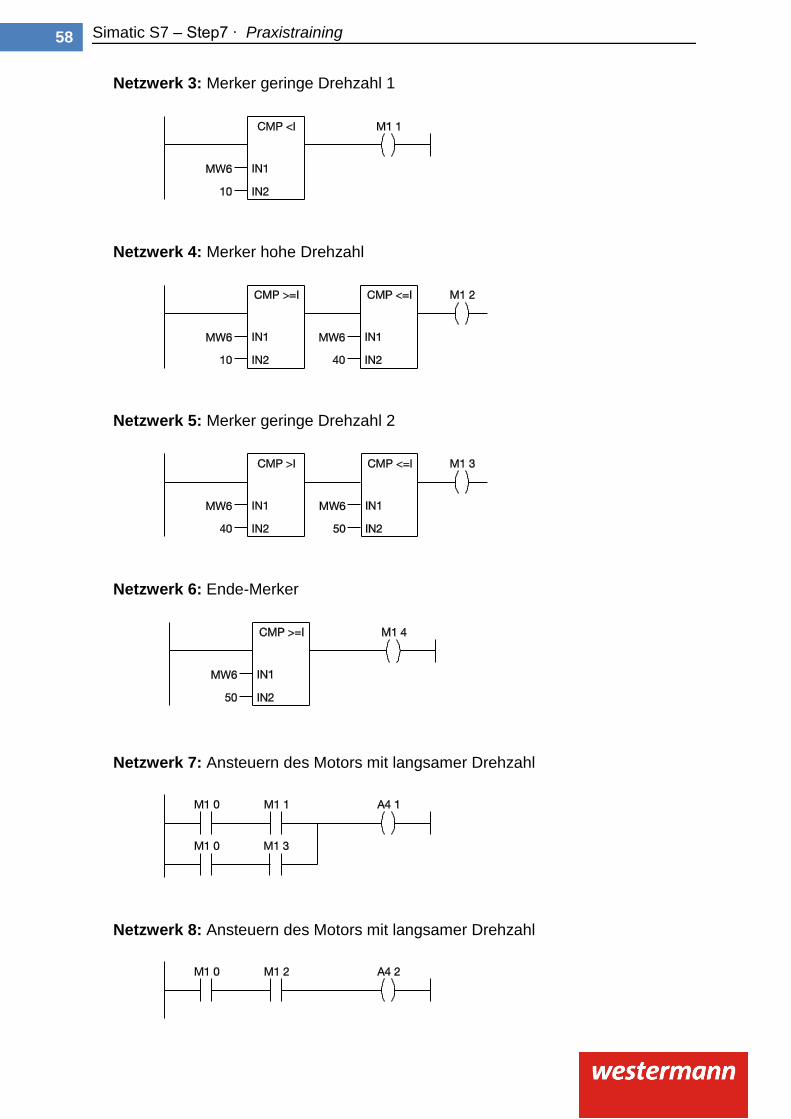
Netzwerk 3: Merker geringe Drehzahl 1
Netzwerk 4: Merker hohe Drehzahl
Netzwerk 5: Merker geringe Drehzahl 2
Netzwerk 6: Ende-Merker
Netzwerk 7: Ansteuern des Motors mit langsamer Drehzahl
Netzwerk 8: Ansteuern des Motors mit langsamer Drehzahl
59 Simatic S7 – Step7 ∙ Praxistraining
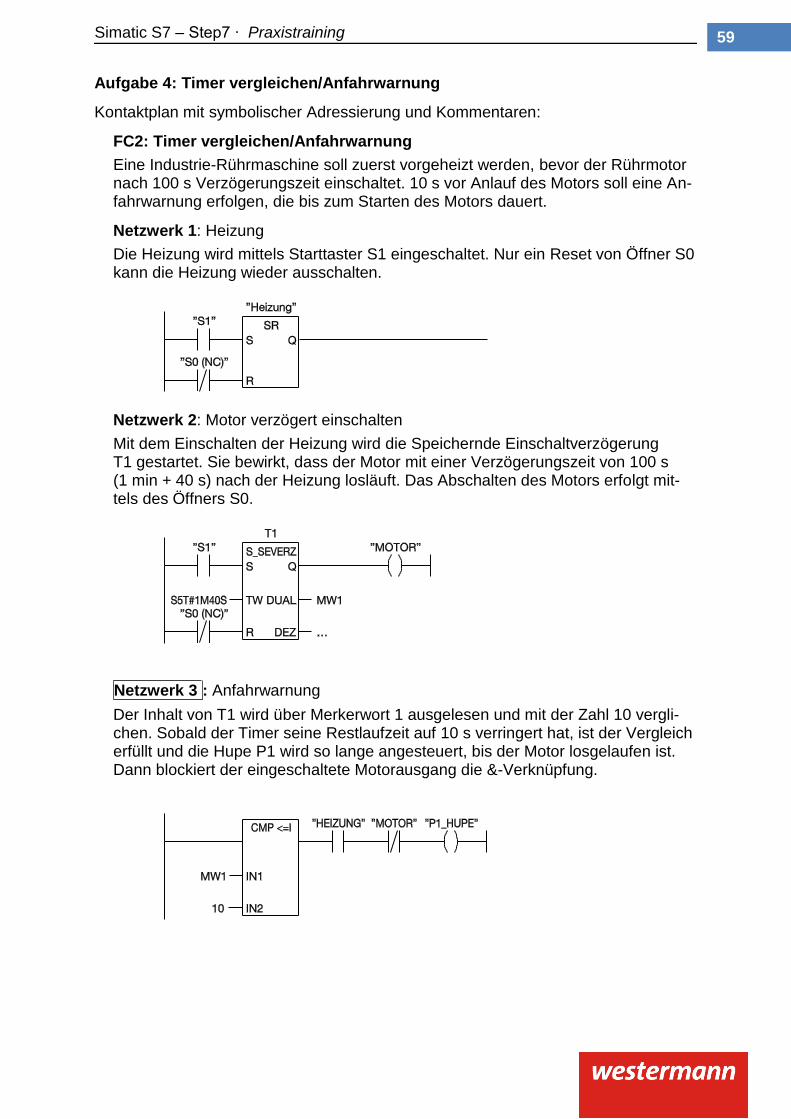
Aufgabe 4: Timer vergleichen/Anfahrwarnung
Kontaktplan mit symbolischer Adressierung und Kommentaren:
FC2: Timer vergleichen/Anfahrwarnung
Eine Industrie-Rührmaschine soll zuerst vorgeheizt werden, bevor der Rührmotor nach 100 s Verzögerungszeit einschaltet. 10 s vor Anlauf des Motors soll eine An-fahrwarnung erfolgen, die bis zum Starten des Motors dauert.
Netzwerk 1: Heizung
Die Heizung wird mittels Starttaster S1 eingeschaltet. Nur ein Reset von Öffner S0 kann die Heizung wieder ausschalten.
Netzwerk 2: Motor verzögert einschalten
Mit dem Einschalten der Heizung wird die Speichernde Einschaltverzögerung T1 gestartet. Sie bewirkt, dass der Motor mit einer Verzögerungszeit von 100 s (1 min + 40 s) nach der Heizung losläuft. Das Abschalten des Motors erfolgt mit-tels des Öffners S0.
Netzwerk 3 : Anfahrwarnung
Der Inhalt von T1 wird über Merkerwort 1 ausgelesen und mit der Zahl 10 vergli-chen. Sobald der Timer seine Restlaufzeit auf 10 s verringert hat, ist der Vergleich erfüllt und die Hupe P1 wird so lange angesteuert, bis der Motor losgelaufen ist. Dann blockiert der eingeschaltete Motorausgang die &-Verknüpfung.
Simatic S7 – Step7 ∙ Praxistraining 60
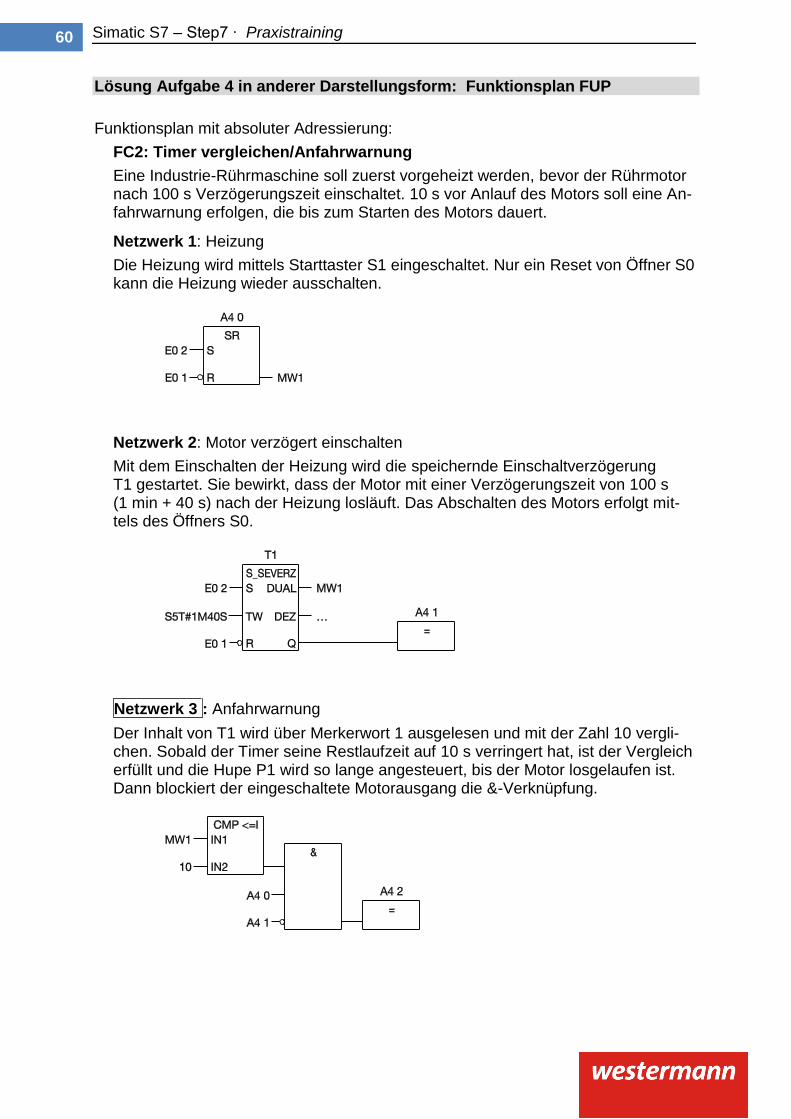
Lösung Aufgabe 4 in anderer Darstellungsform: Funktionsplan FUP
Funktionsplan mit absoluter Adressierung:
FC2: Timer vergleichen/Anfahrwarnung
Eine Industrie-Rührmaschine soll zuerst vorgeheizt werden, bevor der Rührmotor nach 100 s Verzögerungszeit einschaltet. 10 s vor Anlauf des Motors soll eine An-fahrwarnung erfolgen, die bis zum Starten des Motors dauert.
Netzwerk 1: Heizung
Die Heizung wird mittels Starttaster S1 eingeschaltet. Nur ein Reset von Öffner S0 kann die Heizung wieder ausschalten.
Netzwerk 2: Motor verzögert einschalten
Mit dem Einschalten der Heizung wird die speichernde Einschaltverzögerung T1 gestartet. Sie bewirkt, dass der Motor mit einer Verzögerungszeit von 100 s (1 min + 40 s) nach der Heizung losläuft. Das Abschalten des Motors erfolgt mit-tels des Öffners S0.
Netzwerk 3 : Anfahrwarnung
Der Inhalt von T1 wird über Merkerwort 1 ausgelesen und mit der Zahl 10 vergli-chen. Sobald der Timer seine Restlaufzeit auf 10 s verringert hat, ist der Vergleich erfüllt und die Hupe P1 wird so lange angesteuert, bis der Motor losgelaufen ist. Dann blockiert der eingeschaltete Motorausgang die &-Verknüpfung.
61 Simatic S7 – Step7 ∙ Praxistraining
Kapitel 12.7 Seite 99
Aufgabe 1:
a) Beschreibung der Funktion:
NW1: Mittels des EIN-Tasters S2 wird der Merker M5.0 „Betriebsbereit“ gesetzt. Der AUS-Taster S1 soll ihn wieder zurücksetzen.
NW2: Wenn Merker 5.0 (s. NW1) anzeigt, dass Betriebsbereitschaft gegeben ist kann mit Taster S3 die Linksfahrt gestartet werden. Dies erfolgt speichernd mit Merker M5.1
Der Stopp (Reset) erfolgt wahlweise wenn: – die Endlage links, B6 erreicht ist – der AUS-Taster, S1 betätigt wird – der Not-Aus-Taster S5 betätigt wird.
b) Fehler im Programm:
NW1: Der AUS-Taster S1 (E0.0) muss negiert abgefragt werden. Er bringt als Öffner im unbetätigten Zustand das Signal „1“ an den Eingang, was perma-nent den Merker M5.0 rücksetzen würde.
NW2: Statt E0.6 (= B7, Endlage rechts) muss E0.5 (= B6, Endlage links) an den Reset-Eingang von Merker M5.1 geführt werden.
Aufgabe 2:
• mögliche Geberfehler:
– einer der Öffner-Kontakte (S1, B5, B6, B7) hat einen Wackelkontakt, so dass Unterbrechungen den gleichen Effekt wie das Betätigen der Geber hätten. −> das Band wird abgeschaltet. Der Wackelkontakt kann im Schaltelement selbst oder auf der Zuleitung sein.
• wenn das Starten nicht möglich ist, könnte es daran liegen, dass der AUS-Taster S1 klemmt (z. B. wegen mechanischen Verschleiß, Verschmutzung, Frost etc.) Es könnte auch sein, dass die Kontakte von S1 abgenutzt sind, so dass ein einwand-freies Durchschalten nicht gegeben ist. In diesen Fällen reagiert das Programm so, als wäre der AUS-Schalter betätigt und verhindert ein Anlaufen des Bandes.
• wenn das Starten nach links nicht möglich ist, könnten folgende Fehler vorliegen:
– S3 ist nicht korrekt an den Eingang der SPS angeschlossen (Wackelkontakt, Drahtbruch, Verwechslung mit anderen Eingängen …)
– Endlagengeber B6 ist nicht korrekt an die SPS angeschlossen (Wackelkontakt, Drahtbruch, Verwechslung mit anderen Eingängen.
– für Endlagengeber wurde statt eines Öffners (NC) ein Schließer (NO) verwendet. Dies ist eine häufige Fehlerursache, da Geber teilweise sowohl Schließer- als auch Öffner-Funktion bereitstellen. Das Programm deutet dann den Schließer als betätigten Öffner und stoppt/verhindert die Linksfahrt.
– die Verbindungvon SPS zu Schütz Q1 ist unterbrochen, evtl. fehlt der zugehöri-gen Ausgabebaugruppe der SPS die Versorgungsspannung (Anschluss fehlt, Sicherung …)
– Schütz Q1 ist mechanisch defekt, klemmt beispielsweise
Simatic S7 – Step7 ∙ Praxistraining 62
– es könnte auch ein Fehler im Anwenderprogramm vorliegen (falscher oder kein Ausgang programmiert)
• wenn die Bewegungsrichtung des Motors falsch ist, könnten folgende Ursachen vorliegen:
– das Drehfeld des Motors ist falsch (Linksdrehfeld). Abhilfe: Prüfen des Drehfeldes mit Drehfeldmessgerät, falls ein Linksdrehfeld vorliegt, Vertauschen zweier Außenleiter am Klemmbrett des Motors.
– die Eingangssignale sind vertauscht (S3 liegt an E0.3, S4 liegt an E0.2) Abhilfe: Umklemmen der Geber an der Eingabebaugruppe bzw. Klemmenleiste
– die Ausgänge sind vertauscht an die Schütze angeschlossen (Q1 liegt an A4.1, Q2 liegt an A4.0) Abhilfe: Umklemmen der Schütze an der Ausgabebaugruppe bzw. Klemmleiste
– Softwarefehler: die Adressen die Eingänge oder der Ausgänge wurden im Pro-gramm an den falschen Stellen verwendet. Abhilfe: Überprüfung und Verbesserung des Programms im Online-Mode
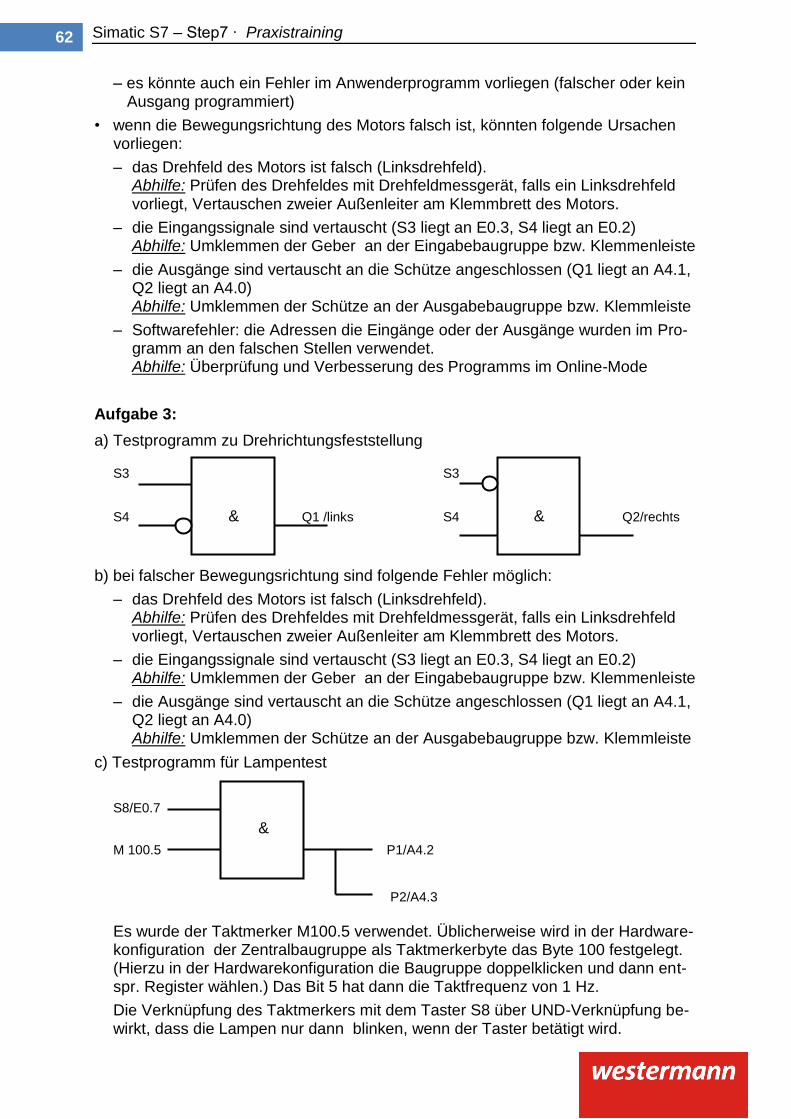
Aufgabe 3:
a) Testprogramm zu Drehrichtungsfeststellung
S3 S3
S4 & Q1 /links S4 & Q2/rechts
b) bei falscher Bewegungsrichtung sind folgende Fehler möglich:
– das Drehfeld des Motors ist falsch (Linksdrehfeld). Abhilfe: Prüfen des Drehfeldes mit Drehfeldmessgerät, falls ein Linksdrehfeld vorliegt, Vertauschen zweier Außenleiter am Klemmbrett des Motors.
– die Eingangssignale sind vertauscht (S3 liegt an E0.3, S4 liegt an E0.2) Abhilfe: Umklemmen der Geber an der Eingabebaugruppe bzw. Klemmenleiste
– die Ausgänge sind vertauscht an die Schütze angeschlossen (Q1 liegt an A4.1, Q2 liegt an A4.0) Abhilfe: Umklemmen der Schütze an der Ausgabebaugruppe bzw. Klemmleiste
c) Testprogramm für Lampentest
S8/E0.7
&
M 100.5 P1/A4.2
P2/A4.3
Es wurde der Taktmerker M100.5 verwendet. Üblicherweise wird in der Hardware-konfiguration der Zentralbaugruppe als Taktmerkerbyte das Byte 100 festgelegt. (Hierzu in der Hardwarekonfiguration die Baugruppe doppelklicken und dann ent-spr. Register wählen.) Das Bit 5 hat dann die Taktfrequenz von 1 Hz.
Die Verknüpfung des Taktmerkers mit dem Taster S8 über UND-Verknüpfung be-wirkt, dass die Lampen nur dann blinken, wenn der Taster betätigt wird.
63 Simatic S7 – Step7 ∙ Praxistraining
Kapitel 12.8 Seite 100
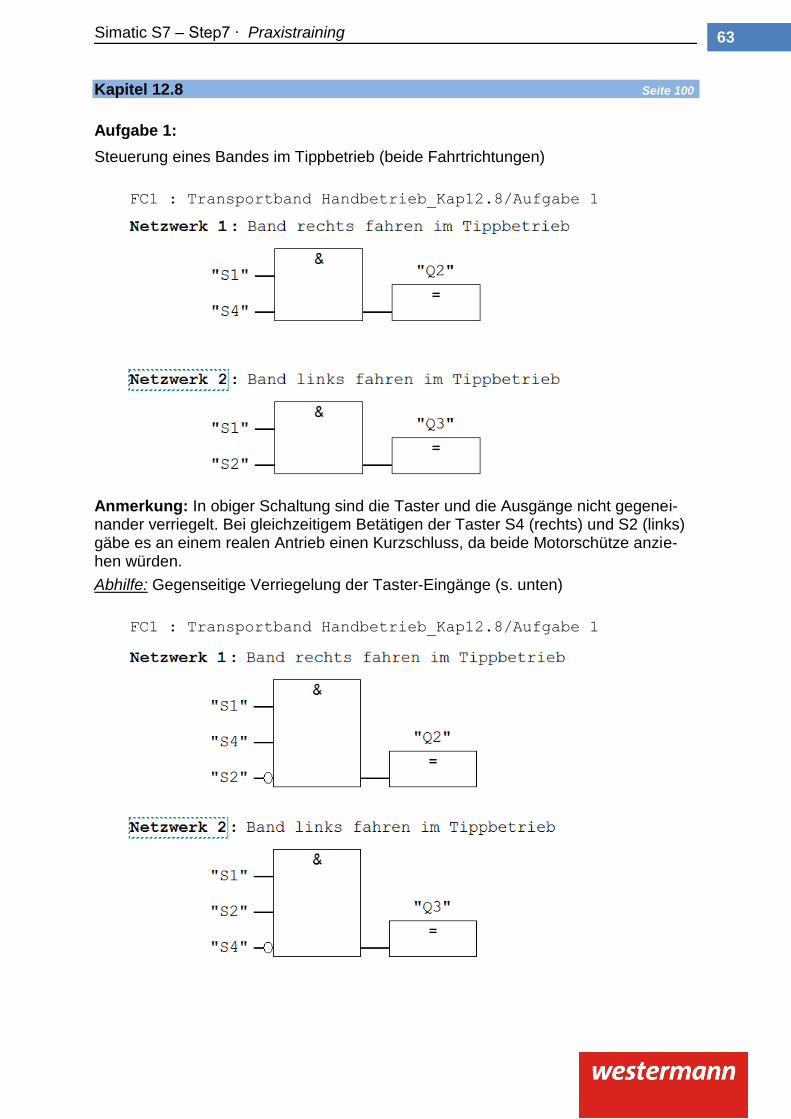
Aufgabe 1:
Steuerung eines Bandes im Tippbetrieb (beide Fahrtrichtungen)
FC1 : Transportband Handbetrieb_Kap12.8/Aufgabe 1
Anmerkung: In obiger Schaltung sind die Taster und die Ausgänge nicht gegenei-nander verriegelt. Bei gleichzeitigem Betätigen der Taster S4 (rechts) und S2 (links) gäbe es an einem realen Antrieb einen Kurzschluss, da beide Motorschütze anzie-hen würden.
Abhilfe: Gegenseitige Verriegelung der Taster-Eingänge (s. unten)
FC1 : Transportband Handbetrieb_Kap12.8/Aufgabe 1
Simatic S7 – Step7 ∙ Praxistraining 64
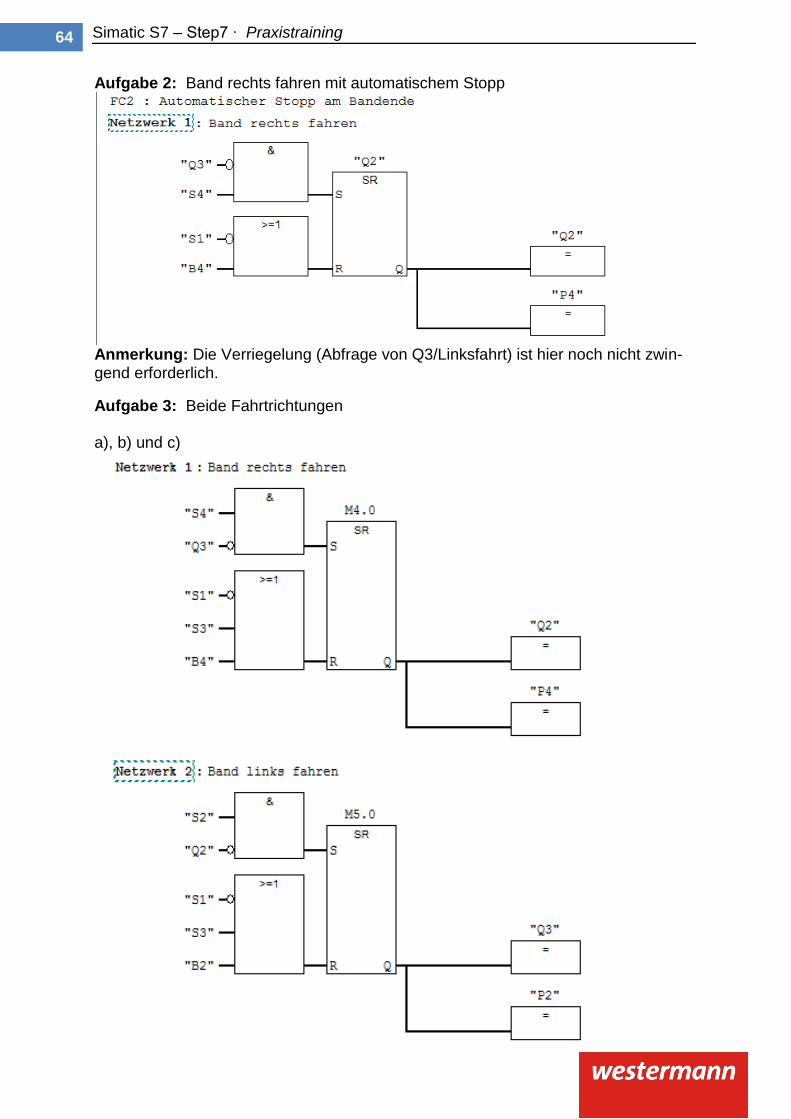
Aufgabe 2: Band rechts fahren mit automatischem Stopp
Anmerkung: Die Verriegelung (Abfrage von Q3/Linksfahrt) ist hier noch nicht zwin-gend erforderlich.
Aufgabe 3: Beide Fahrtrichtungen
a), b) und c)
65 Simatic S7 – Step7 ∙ Praxistraining
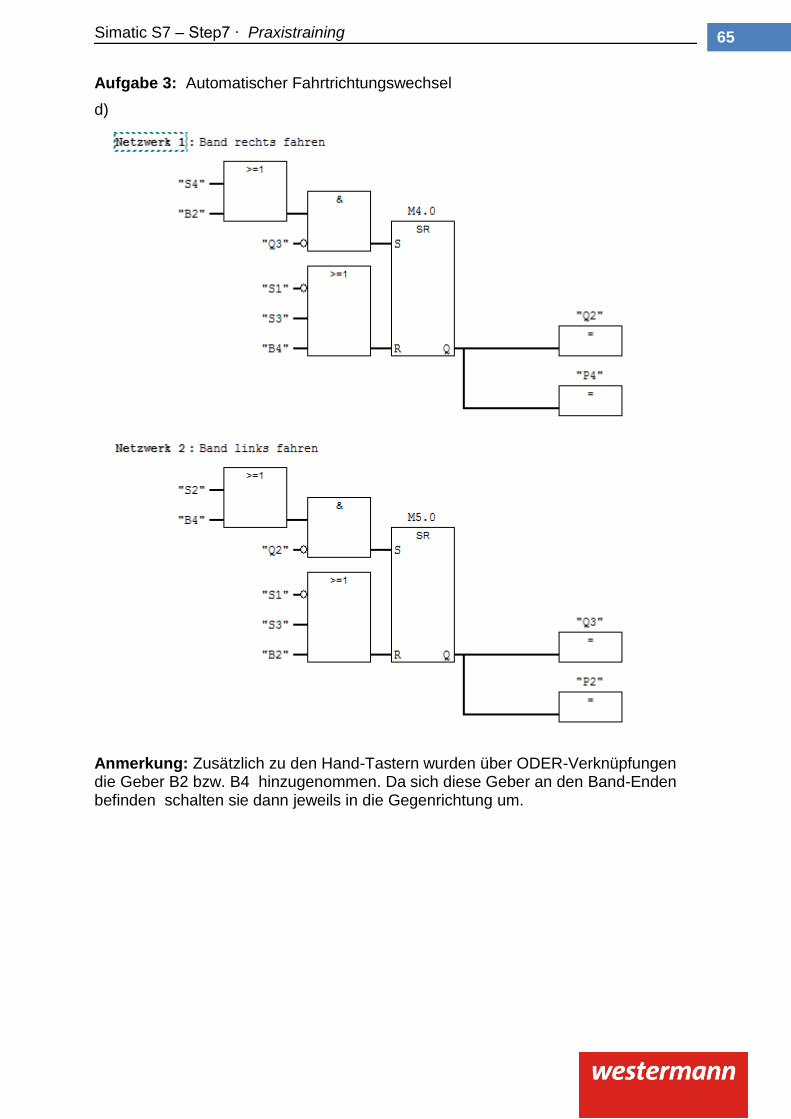
Aufgabe 3: Automatischer Fahrtrichtungswechsel
d)
Anmerkung: Zusätzlich zu den Hand-Tastern wurden über ODER-Verknüpfungen die Geber B2 bzw. B4 hinzugenommen. Da sich diese Geber an den Band-Enden befinden schalten sie dann jeweils in die Gegenrichtung um.
Simatic S7 – Step7 ∙ Praxistraining 66
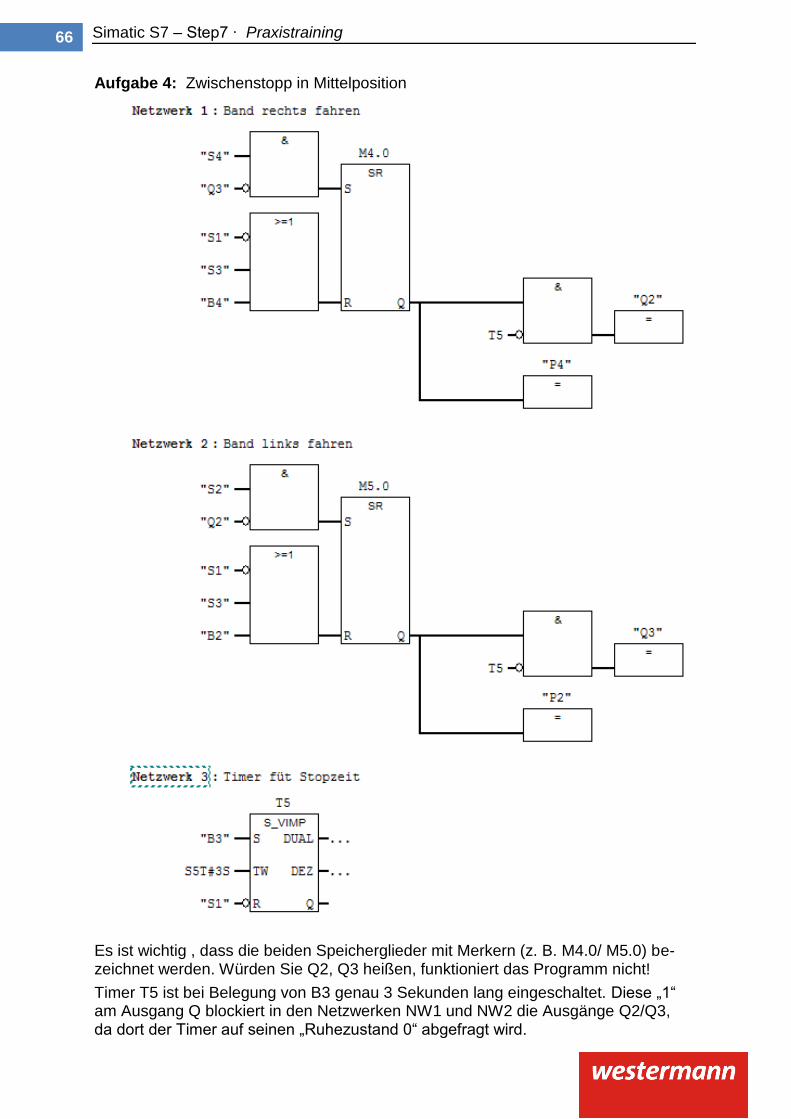
Aufgabe 4: Zwischenstopp in Mittelposition
Es ist wichtig , dass die beiden Speicherglieder mit Merkern (z. B. M4.0/ M5.0) be-zeichnet werden. Würden Sie Q2, Q3 heißen, funktioniert das Programm nicht!
Timer T5 ist bei Belegung von B3 genau 3 Sekunden lang eingeschaltet. Diese „1“ am Ausgang Q blockiert in den Netzwerken NW1 und NW2 die Ausgänge Q2/Q3, da dort der Timer auf seinen „Ruhezustand 0“ abgefragt wird.