signal processing by neural agenda networks - uncini · dmlp with internal memory aseveral...
TRANSCRIPT

1
Signal Processing by Neural Networks
Aurelio Uncini
INFOCOM Dept.
University of Rome “La Sapienza”
e-mail: [email protected]
International Joint Conference on Neural Networks, Washington, DC USA, July 18 2001
2
Agenda
Neural architectures for real-time DSP Non-linear generalizations of FIR-IIR filters by Dynamic Multilayer Perceptron (DMLP) neural networks;Fast adaptive spline neural model for signal processing
Some Applications
2
3
linear DSP: it's enough ?
major classical DSP techniques are based on linear models
in the real world the processes are non-linear
linear structures could not be able to model them adequately
3
4
specific non-linear architectures
particular class of problemsefficient but specific
e.g.median and bilinear filterssome spectral analysis techniques…
generic non-linear architectures
large class of problemgeneral but complex
e.g.Volterra filtersnon-linear state equationspolynomial filtersfunctional links…
non-linear DSP: classical approaches
4
specific or generic?
5
non-linear DSP: desired approaches
"standard" architecture with scalable complexity;
capability to approximate any non-linear (dynamic) behaviour;
"standard" design algorithms;
good implementation efficiency
use of the available know-how on linear filters;use of the available DSP processors for real-time audio applications.
5
generic and efficient
6
non-linear DSP: a different approach
dynamic = capability of processing temporal sequences
⌧how to get dynamic behaviours from an ANN;⌧non-linear FIR/IIR architectures;⌧design methods or learning process.
6
Dynamic Artificial Neural Networks (discrete time ANN)

7
ANN: Multi-Layer model
sgm
sgm
sgm
x
x
1
2
Nw1N
y2
.
.
.
x
+x
x
1
2
N w N
x1w
w2
s
sgmy
.
.
.
sgm
sgm
.
.
.
.
.
.
w2M
w11 21w y
1
My
(b)
(a)
”Artificial neurons" arranged in layers Multi-Layer Perceptron (MLP)
feedforward structure without delaysno dynamics
approximation of any non-linearityCibenko ‘88, Hornik et al. ‘89non-linear universal approximator
sgm
7
8
Dynamic Multilayer Networks (DMLP)
External memorythe non-linear filter is built using a static MLP inside a FIR/IIR framework
external delay lines ("buffers")Narendra-Partharasarathy 1990
Internal memorythe non-linear filter is built using a MLP with neurons containing FIR/IIR filters
internal delay lines ("dynamic neuron")Waibel et al. 1989, Back-Tsoi1991/94, Frasconi et al. 1992, Campolucci et al. 1999, etc.
Delay lines (memory elements) put dynamic in the multilayer model
8
9
DMLP with external memory FIR scheme
allows to use the classical multilayer model;
straightforward generalization of the linear FIR filters: linear filter ≡ DMLP with one neuron + (f(.) = identity)
x[k]
x[k-1]
x[k-M+1]
y[k]Output
Signal
MLP
z -1
Input Signal
z -1
z -1
9Universal Functional Approximator
10
DMLP with external memory IIR scheme
allows to use the classical multilayer model;
straightforward generalization of the linear IIR filters: linear filter ≡ DMLP with one neuron + f(.) = identity
y[k]OutputSignal
MLP
z -1
z -1
x[k]
x[k-1]
y[k-1]
y[k-2]
Input Signal
z -1
z -1
z -1
feedback
11
DMLP with internal memory
several different research contributions (already object of studies);
another generalization of the linear FIR/IIR filters: linear filter ≡ DMLP with one neuron + (f(.)=identity)
multilayer network composed by "dynamic" neurons
y[k]
Input Signals
OutputSignal
MLPD
D
D
D
D
D
D
D
D = dynamic neuron
11
12
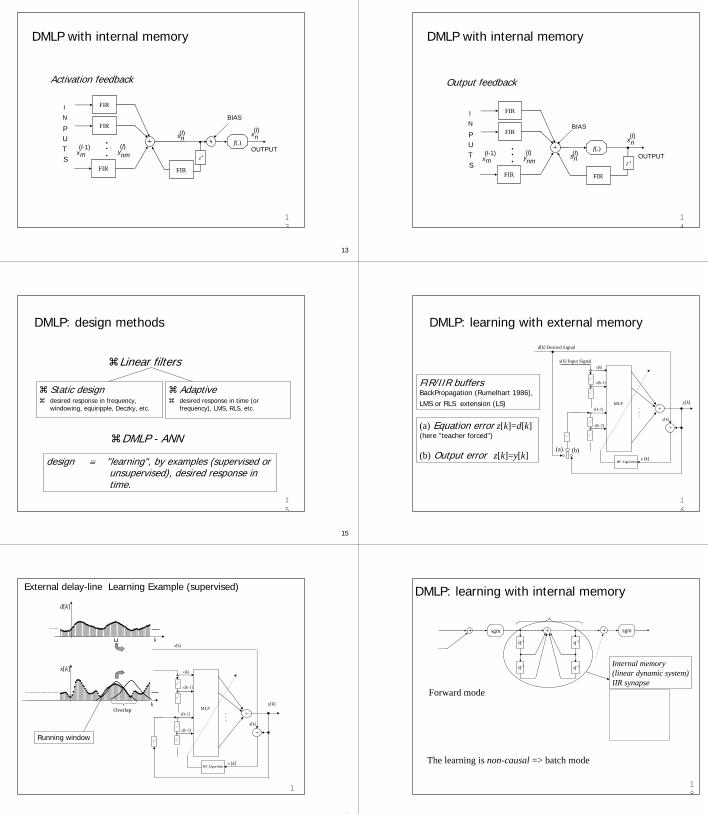
DMLP with internal memory
FIR/IIR synapses
... OUTPUT
BIAS
I
N
P UTS
x(l)
s(l)n
n
y(l)nmx
(l-1)m
f(.)
FIR/IIR
FIR/IIR
FIR/IIR
12
13
DMLP with internal memory
Activation feedback
...
BIASIN
P UTS
s(l)n
y(l)nmx
(l-1)m
FIR
FIR
FIR
OUTPUT
x(l)nf(.)
Z-1
FIR
13
14
DMLP with internal memory
Output feedback
...
BIAS
IN
P UTS
s(l)ny(l)nmx
(l-1)m
FIR
FIR
FIR
OUTPUT
x(l)nf(.)
Z-1
FIR
14
15
DMLP: design methods
Static designdesired response in frequency, windowing, equiripple, Deczky, etc.
Adaptivedesired response in time (or frequency), LMS, RLS, etc.
Linear filters
design ≡ "learning", by examples (supervised or unsupervised), desired response intime.
DMLP - ANN
15
16
DMLP: learning with external memory
z-1
z-1
z-1
z-1
x[k] Input Signalx[k]
x[k-1]
•••
MLPz[k-1]
z[k-2]
y[k]
(a) (b)
z-1
BP Algorithm
d[k]
ε [k]
FIR/IIR buffersBackPropagation (Rumelhart 1986), LMS or RLS extension (LS)
(a) Equation error z[k]=d[k](here "teacher forced")
(b) Output error z[k]=y[k]
d[k] Desired Signal
16
17
External delay-line Learning Example (supervised)
1
x[k]
k
d[k]
k
z-1
z-1
z-1
z-1
x[k]
x[k-1]
•••
MLPz[k-1]
z[k-2]
y[k]
z-1
BP Algorithm
d[k]
ε [k]
d[k]
Overlap
Running window
18
18
sgm(2)1 [ ]x t(2)
11(0)w
(2)11(2)v
(0)1 [ ]x t
(0)2 [ ]x t
(1)1 [ ]x t
1
1
( , ) 1 ( , )
B t qA t q
−
−−
(2)11(1)w
(2)11(2)w
(2)11(1)v
sgm(1)11w
(1)12w
(1)1 [ ]s t (2)
11 [ ]y t
DMLP: learning with internal memory
( )
1
1( ) ( ) ( 1) ( ) ( 1)
( ) ( )0 1
( ) ( )
0
( ) ( )
[ ] [ ] [ ];
[ ] [ ];
[ ] sgm [ ] ;
l lnm nm
l
L Il l l l l
nm nm p m nm p nmp p
Nl l
n nmm
l ln n
y t w x t p v y t p
s t y t
x t s t
−
−− −
= =
=
= − + −
=
=
∑ ∑
∑
Forward mode 1
1
11
1
11
( , ) [ ] ( )1 ( , )
( , ) [ ]
( , ) [ ]
Np
pp
Mp
pp o
B t qy t x tA t q
A t q v t q
B t q w t q
−
−
−− −
=
−− −
=
⎛ ⎞= ⎜ ⎟−⎝ ⎠
=
=
∑
∑
Internal memory (linear dynamic system)IIR synapse
The learning is non-causal => batch mode ( )2( )
1[ ] [ ] ;
TM
n nt
J d t x t=
= −∑
q-1
q-1
q-1
q-1
(1)2 [ ]s t

19
19
sgm
sgm’
1
1
( , ) 1 ( , )
B t qA t q
+
+−
(1)11 [ 1]w t∆ +
sgm’
1
1 1 ( , )A t q−−
(2)11(1)[ 1]v t∆ +
(2)11(2)[ 1]v t∆ +
-
d[t]
(2)1 [ ]x t
(2)11(0)w
(2)11(2)v
(0)1 [ ]x t
(0)2 [ ]x t
(1)1 [ ]x t
1
1
( , ) 1 ( , )
B t qA t q
−
−−
µ
(2)11(1)w
(2)11(2)w
(2)11(1)v
sgm(1)11w
(1)12w
(2)11(0)[ 1]w t∆ +
(2)11(1)[ 1]w t∆ +
µ
q-1
q-1
q-1
q-1
(1)1 [ ]s t (2)
11 [ ]y t
(1)12 [ 1]w t∆ +
RBP: General framework to derive several causalisedon-line approximations learning algorithms for DMLP
DMLP: Recursive Backpropagation (RBP)
(2)11(2)[ 1]w t∆ +
RBP signal flow graph
20
DMLP: complexity, implementation
Computational complexity(fast learning algorithms)
Structural complexity (in terms of number of interconnections)
A suitable activation function can increase the Neural Network representation property
Fewer neurons needed
• small structural complexity• small computational complexity 2
0
21
A New Neuron Architecture
Theoretical framework Extention of the Cybenko theorem : (Hornik, Stinchcombe, White, 1989)
neurons which present any "squashing" activation function maintain the universal approximation characteristics
GOALS FOR THE NEW NEURONA "more sophisticate" activation function;Retains the squashing property of the sigmoid;Necessary smoothing characteristic;Easy to implement both in hardware and in softwareFlexible (by the adaptation of few free parameters).
21
22
A New Neuron Architecture’s Activation Function
• Squashing characteristic
s
G
-G• Flexible shape
Two needed properties
New Neural Network Architecture with Flexible Adaptive Activation Function
22
23
Adaptive Spline Neural Network (ASNN)
x0 x1 xNxN-1xN-2xN-2x2 x3
i=0 i=1i=N-4 i=N-3
h(x)
Using Catmull-Rom or B-splines functions, with uniformly spaced control points, the shape of the activation function is controlled by few parameters (3rd degree: four control points).
x
Local shape adaptationSmooth characteristic: suitable for signal processing applications
2
24
ASNN: Spline Activation Function
iQ1iQ+
2iQ+ 3iQ+
0x
u x∆
x
( )h x( , )h u i
x∆
Catmull-Rom
B-Spline
Spline activation function is specified as the weighted average of the four equally spaced control points
( ) ( ),y h x h u i= =1 2 3, , ,i i i iQ Q Q Q+ + + 2
4
25
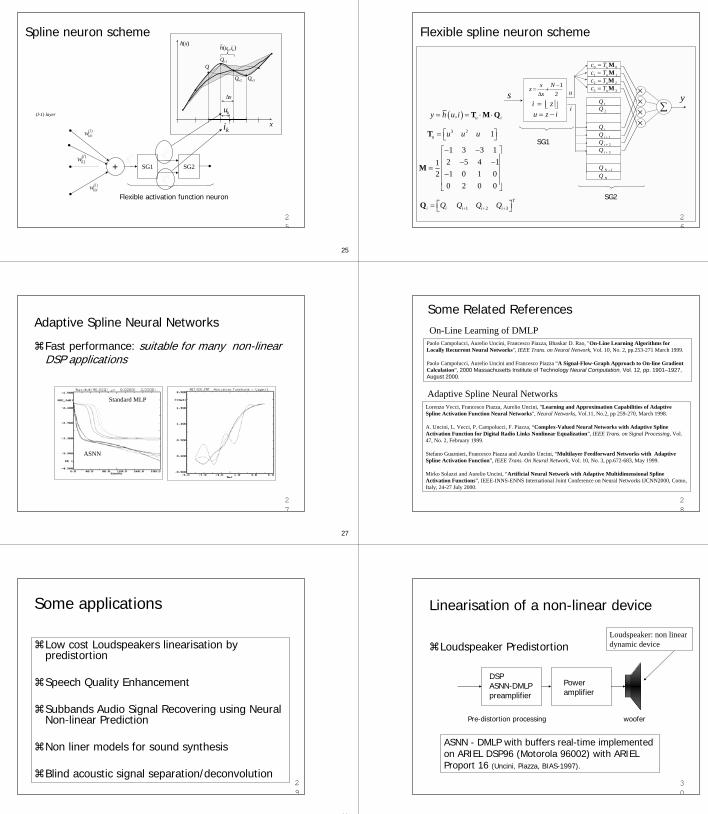
Spline neuron scheme
( 1)0lx −
( 1)1lx −
( 1)lix −
( 1)lNx −
( )0l
kw
( )1l
kw
( )lkNw
SG1 SG2
( )lks
( )lku
( )lki
( )lkx
(l-1) layer
+
Flexible activation function neuron
25
iQ1iQ+
2iQ+ 3iQ+
ku
x
( )h x( , )k kh u i
x∆
ik
26
Flexible spline neuron scheme
∑y
i
u ××××
iQ1iQ +
2iQ +
3iQ +
1Q
NQ1NQ −
s
0 0uc T= M1 1uc T= M
3 3uc T= M2 2uc T= M
2Qi z= ⎢ ⎥⎣ ⎦
12
x Nzx
−= +∆
u z i= −( ), u iy h u i= = ⋅ ⋅T M Q
3 2 1u u u u⎡ ⎤= ⎣ ⎦T
1 3 3 12 5 4 111 0 1 02
0 2 0 0
− −⎡ ⎤⎢ ⎥− −⎢ ⎥=−⎢ ⎥⎢ ⎥⎣ ⎦
M
1 2 3
T
i i i i iQ Q Q Q+ + +⎡ ⎤= ⎣ ⎦Q
SG1
SG2
26
27
Adaptive Spline Neural Networks
Fast performance: suitable for many non-linear DSP applications
27
Standard MLP
ASNN
28
Some Related References
28
Lorenzo Vecci, Francesco Piazza, Aurelio Uncini, "Learning and Approximation Capabilities of Adaptive Spline Activation Function Neural Networks", Neural Networks, Vol.11, No.2, pp 259-270, March 1998.
A. Uncini, L. Vecci, P. Campolucci, F. Piazza, “Complex-Valued Neural Networks with Adaptive Spline Activation Function for Digital Radio Links Nonlinear Equalization”, IEEE Trans. on Signal Processing, Vol. 47, No. 2, February 1999.
Stefano Guarnieri, Francesco Piazza and Aurelio Uncini, “Multilayer Feedforward Networks with Adaptive Spline Activation Function”, IEEE Trans. On Neural Network, Vol. 10, No. 3, pp.672-683, May 1999.
Mirko Solazzi and Aurelio Uncini, “Artificial Neural Network with Adaptive Multidimensional Spline Activation Functions”, IEEE-INNS-ENNS International Joint Conference on Neural Networks IJCNN2000, Como, Italy, 24-27 July 2000.
Paolo Campolucci, Aurelio Uncini, Francesco Piazza, Bhaskar D. Rao, "On-Line Learning Algorithms for Locally Recurrent Neural Networks", IEEE Trans. on Neural Network, Vol. 10, No. 2, pp.253-271 March 1999.
Paolo Campolucci, Aurelio Uncini and Francesco Piazza “A Signal-Flow-Graph Approach to On-line Gradient Calculation”, 2000 Massachusetts Institute of Technology Neural Computation, Vol. 12, pp. 1901–1927, August 2000.
On-Line Learning of DMLP
Adaptive Spline Neural Networks
29
Some applications
Low cost Loudspeakers linearisation by predistortion
Speech Quality Enhancement
Subbands Audio Signal Recovering using Neural Non-linear Prediction
Non liner models for sound synthesis
Blind acoustic signal separation/deconvolution29
30
Linearisation of a non-linear device
Loudspeaker Predistortion
ASNN - DMLP with buffers real-time implemented on ARIEL DSP96 (Motorola 96002) with ARIEL Proport 16 (Uncini, Piazza, BIAS-1997).
DSPASNN-DMLP preamplifier
woofer
Power amplifier
Pre-distortion processing
30
Loudspeaker: non linear dynamic device
31
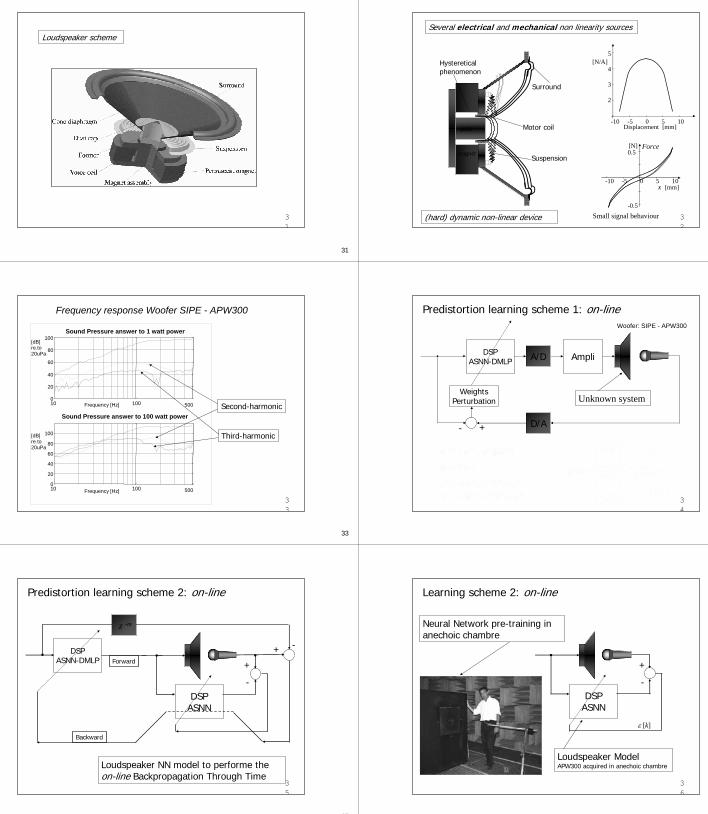
Loudspeaker scheme
31
32
Several electrical and mechanical non linearity sources
(hard) dynamic non-linear device
Displacement [mm]-10 -5 0 5 10
5
4
3
2
[N/A]l
dl∫B
32
Surround
Suspension
Motor coil
Hystereticalphenomenon
pole
magnet 0.5
-0.5
-10 -5 0 5 10
[N]
x [mm]
Force
Small signal behaviour
33
10 1000
20
40
60
80
100
Frequency [Hz]
[dB]re.to20uPa
Sound Pressure answer to 1 watt power
10 1000
20
40
60
80
100
Frequency [Hz]
[dB]re.to20uPa
Sound Pressure answer to 100 watt power
500
500
Second-harmonic
Third-harmonic
Frequency response Woofer SIPE - APW300
33
34
Predistortion learning scheme 1: on-line
DSPASNN-DMLP A/D Ampli
D/A
WeightsPerturbation
- +
( 1) ( ) ( ) ( )ˆˆ ˆ ˆ( )k k k kη+ = −w w g w
ˆ ( ) ( )J⋅ ≈ ∇ ⋅g
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
ˆ( )ˆ( )
k k k k k
k k k k k
z J c
z J c
ε
ε+ +
− −
= + ∆ +
= − ∆ +
w
w
( ) ( )
( ) ( )1( )1
1
( ) ( ) ( ) ( )1( ) ( ) ( )
( ) ( ) ( )
1( )( ) ( )
( ) ( )
2
ˆ ˆ( )2 2
2
k k
k kk
k k k kk k k
k k k jj
kk k n
k kn
z zc
z z z zc c
z zc
+ −
−
−+ − + −
−
+ −
⎡ ⎤−⎢ ⎥∆ ⎡ ⎤⎢ ⎥ ∆
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
− − ⎢ ⎥⎢ ⎥= = ∆⎢ ⎥⎢ ⎥∆⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ∆⎣ ⎦−⎢ ⎥
⎢ ⎥∆⎣ ⎦
g w
Woofer: SIPE - APW300
34
Unknown system
35
Predistortion learning scheme 2: on-line
DSPASNN
Loudspeaker NN model to performe the on-line Backpropagation Through Time
DSPASNN-DMLP
-+
z -m
Forward
Backward
-
+
35
36
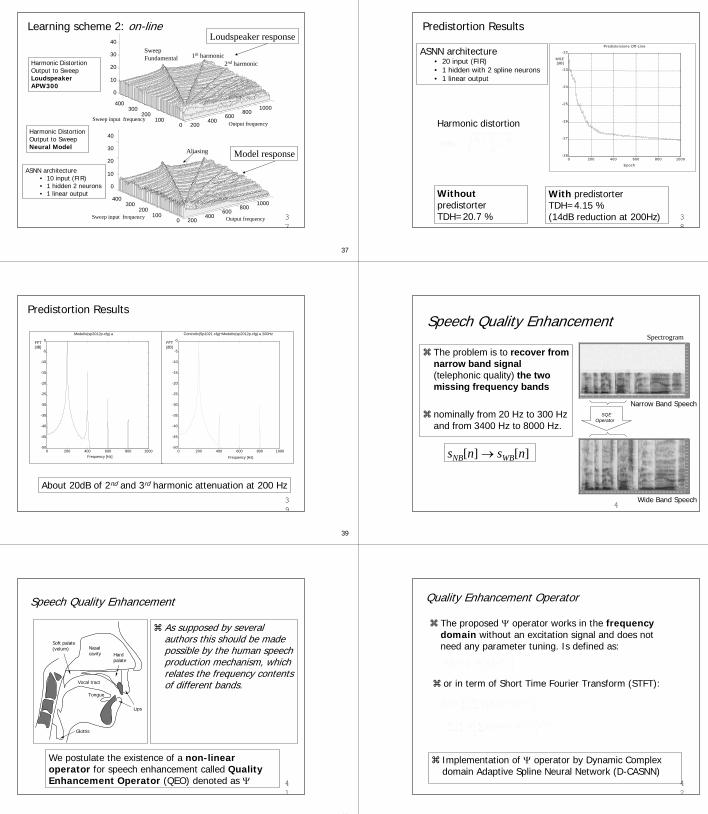
Learning scheme 2: on-line
Neural Network pre-training in anechoic chambre
DSPASNN
-
+
Loudspeaker ModelAPW300 acquired in anechoic chambre
36
ε [k]
37
Learning scheme 2: on-line
200400
600800
1000
0100
200300
400
0
10
20
30
40
Harmonic Distortion Output to Sweep Loudspeaker APW300
SweepFundamental 1th harmonic
2nd harmonic
Output frequencySweep input frequency
0
10
20
30
40
200400
600800
1000
0100
200300
400
Harmonic DistortionOutput to Sweep Neural Model Aliasing
ASNN architecture• 10 input (FIR)• 1 hidden 2 neurons• 1 linear output
Sweep input frequencyOutput frequency
37
Loudspeaker response
Model response
38
ASNN architecture• 20 input (FIR)• 1 hidden with 2 spline neurons• 1 linear output
Predistortion Results
2 2 2
IV 2II III IV
I
A A AA
+ +=THD
Harmonic distortion
0 200 400 600 800 1000-28
-27
-26
-25
-24
-23
-22
Epoch
MSE [dB]
Predistorsione Off-Line
WithoutpredistorterTDH=20.7 %
With predistorterTDH=4.15 % (14dB reduction at 200Hz) 3
8
39
About 20dB of 2nd and 3rd harmonic attenuation at 200 Hz
Predistortion Results
0 200 400 600 800 1000-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Frequency [Hz]
FFT[dB]
Modello(sp2012p.cfg) a
0 200 400 600 800 1000-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Frequency [Hz]
FFT[dB]
Controllo(Sp1021.cfg)+Modello(sp2012p.cfg) a 200Hz
39
40
Speech Quality Enhancement
The problem is to recover from narrow band signal (telephonic quality) the two missing frequency bands
nominally from 20 Hz to 300 Hz and from 3400 Hz to 8000 Hz.
SQEOperator
sNB[n] → sWB[n]
Narrow Band Speech
Wide Band Speech4
Spectrogram
41
Speech Quality Enhancement
As supposed by several authors this should be made possible by the human speech production mechanism, which relates the frequency contents of different bands.
We postulate the existence of a non-linear operator for speech enhancement called Quality Enhancement Operator (QEO) denoted as Ψ 4
1
Soft palate(velum)
Vocal tract
Tongue
Glottis
Nasalcavity Hard
palate
Lips
42
Quality Enhancement Operator
The proposed Ψ operator works in the frequency domain without an excitation signal and does not need any parameter tuning. Is defined as:
Implementation of Ψ operator by Dynamic Complex domain Adaptive Spline Neural Network (D-CASNN)
( ) ( )k kj jn nS e S eω ω⎡ ⎤= Ψ ⎣ ⎦
or in term of Short Time Fourier Transform (STFT):
( )[ ]
[ ] [ ]
k k
k k
j j nn
m k
j l j n
m k l
s n S e e
s l w m l e e
ω ω
ω ω−
⎡ ⎤⎡ ⎤= Ψ⎢ ⎥⎣ ⎦⎣ ⎦⎡ ⎤⎡ ⎤
= Ψ −⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦
∑ ∑
∑ ∑ ∑
42

43
Proposed Speech Quality Enhancement scheme 1
2 ↑ LPF FFTM
Ψ HF
Ψ LF
IFFTM
w[n]
Telephonic freq.
Reconstructed
High freq.
Reconstructed
Low freq.
sNB[n] sWB[n]
43
44
Proposed Speech Quality Enhancement scheme 2
2 ↑ LPF FFTM
Ψ HF
Ψ LF
IFFTM
w[n]
Telephonic freq.
Reconstructed
High freq.
Reconstructed
Low freq.
sNB[n] sWB[n]
V/UV
LPC Rectifier HPF
UV
V
Residual
Additional scheme for the recovery of high frequency unvoiced sounds 4
4
45
Speech Quality Enhancement set-up
64 points Hanning windows with an overlap of 32 points;
64 points complex FFT/IFFT;
a DCASNN1 with 12 inputs and 2 outputs, with ∆x=1 for each neuron for the recovery of the low band;
a DCASNN2 with 12 inputs and 19 outputs, with ∆x=1 for the recovery of the high band voiced sounds;
an LPC of order 8 for the recovery of the high band unvoiced sounds followed by a rectifier and a high-pass filter.
45Very small networks implemented in standard low costfloating-point DSP processor (Texas TMSC30)
46
Preliminary results (working on)
Narrow Band speech
Reconstructed Wide Band speech
46
47
Subbands Audio Signal Recovering using Neural Non-linear Prediction
Audio signal recovering is a common problem in digital audio restoration field. The reconstruction of L consecutive missing samples in an audio signal may be considered an extrapolation problem
0 500 1000 1500 2000-0.4
-0.2
0
0.2
0.4
Samples
Am
plitu
de
Ex. of 400 samples (8ms) of missing samples of music audio signal 47
48
Backward Cross-fade Gain
Backward prediction
Forward prediction
Forward Cross-fade Gain
Reconstructed signal
Missing audiosamples
METHOD: CROSS-FADE OF FORWARD AND BACKWARD PREDICTED SAMPLES
48
49
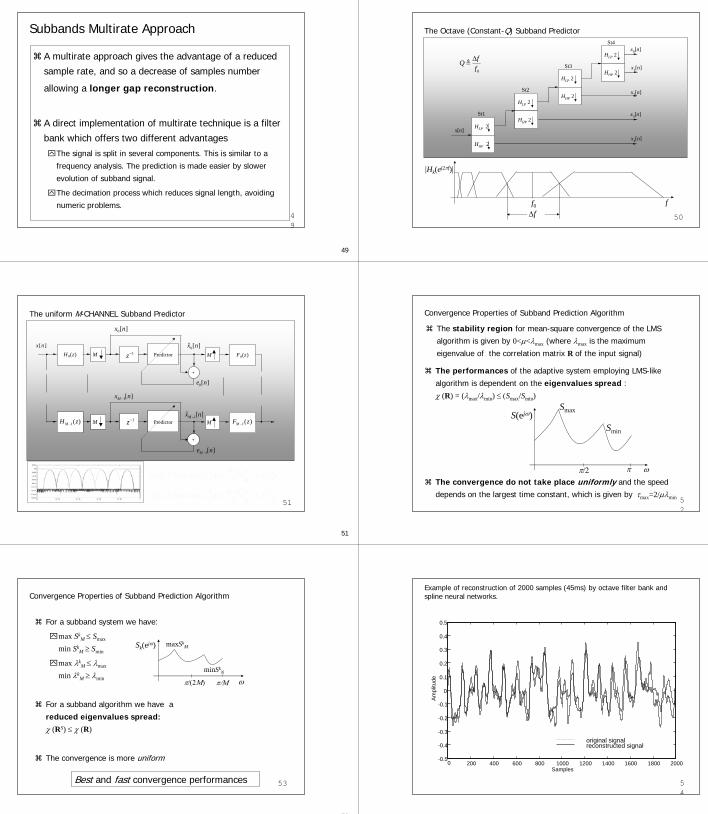
Subbands Multirate Approach
A multirate approach gives the advantage of a reduced
sample rate, and so a decrease of samples number
allowing a longer gap reconstruction.
A direct implementation of multirate technique is a filter
bank which offers two different advantagesThe signal is split in several components. This is similar to a
frequency analysis. The prediction is made easier by slower
evolution of subband signal.
The decimation process which reduces signal length, avoiding
numeric problems.49
50
The Octave (Constant-Q) Subband Predictor
50
HLP 2x[n]
HHP 2
HLP 2
HHP 2
HLP 2
HHP 2
HLP 2
HHP 2
x0[n]
x1[n]
x2[n]
x3[n]
x4[n]
St1
St2
St3
St4
0
fQf∆
∆ff0 f
|Hk(ej2πf)|
51
x [n]H0(z) M MPredictor
+
0[ ]x n
0ˆ [ ]x nF0(z)
0[ ]e n
M MPredictor
+
1[ ]Mx n−
1ˆ [ ]Mx n−
1( )MH z− 1( )MF z−
1[ ]Me n−
1z−
1z−
The uniform M-CHANNEL Subband Predictor
51
1 1[ ] 2 [ ] cos(( )[ ] ( 1) )2 2 4
ii
Nh n h n i nMπ π−
= ⋅ ⋅ + − + −
1 1[ ] 2 ( ) cos(( )[ ] ( 1) )2 2 4
ii
Nf n h n i nMπ π−
= ⋅ ⋅ + − − −
52
Convergence Properties of Subband Prediction Algorithm
The stability region for mean-square convergence of the LMS algorithm is given by 0<µ<λmax (where λmax is the maximum
eigenvalue of the correlation matrix R of the input signal)
The performances of the adaptive system employing LMS-like
algorithm is dependent on the eigenvalues spread : χ (R) = (λmax/λmin) ≤ (Smax/Smin)
The convergence do not take place uniformly and the speed depends on the largest time constant, which is given by τmax=2/µλmin
π/2 π ω
S(ejω)Smax
Smin
52
53
Convergence Properties of Subband Prediction Algorithm
For a subband system we have:
max SkM ≤ Smax
min SkM ≥ Smin
max λkM ≤ λmax
min λkM ≥ λmin
For a subband algorithm we have a
reduced eigenvalues spread:χ (RS) ≤ χ (R)
The convergence is more uniform
Best and fast convergence performances
π/(2Μ) π/Μ ω
Sk(ejω) maxSkM
minSkN
53
54
200 400 600 800 1000 1200 1400 1600 1800 2000-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Samples
Am
plitu
de
original signalreconstructed signal
0
Example of reconstruction of 2000 samples (45ms) by octave filter bank and spline neural networks.
54

55
The MAXERR and MSE vs signal reconstructed length
0 20 40 60 80 100 120ms
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22
0.24
Erro
r max
UFB+LPUFB+ASNNOFB+LPOFB+ASNN
0 20 40 60 80 100 120-36
-34
-32
-30
-28
-26
-24
-22
MS
E(d
B)
UFB+LPUFB+ASNNOFB+LPOFB+ASNN
ms
Best performances55
56
The subjective opinion vs signal reconstructed length
10 20 30 40 50 60 70 80 90 100 110 1202.5
3
3.5
4
4.5
5
ms
Sub
ject
ive
UFB+LPUFB+ASNNOFB+LPOFB+ASNN
Best performances56
57
Experimental Results
Signal with missing samples
57
Signal with recovered samples
58
Non liner models for sound synthesis
Natural extension of non-linear distortion synthesis technique (dynamic non linearity)
parametric control
DMLP-ASNN
signal input signal output
Feed forward scheme
Neural Networks can represent a generalization of several digital sound synthesis techniques
58
59
E.g. non linear musical oscillator (lumped circuit model)
Fairly idealized general musical oscillatorNon linear function + linear filter
⌧e(t) = f(y(t) , xE(t)) = excitation signal⌧xE(t) = external control
Energy source
e(t) y(t)
xE(t)
59
f(.)non linear active element
Resonatorlinear passive element
60
Example of a single-reed instrument
Mouthpressure
p+[n]
p-[n]
Reed
Bore Tone-hole lattice
p0[n]
REED -> External Exitation
BORE -> Resonator
BELL -> Acoustic impedance adaptation
TONE-HOLE -> Fingers control
Bell
60
61
p+[n]
p-[n]Bore Tone-hole lattice
p0[n]
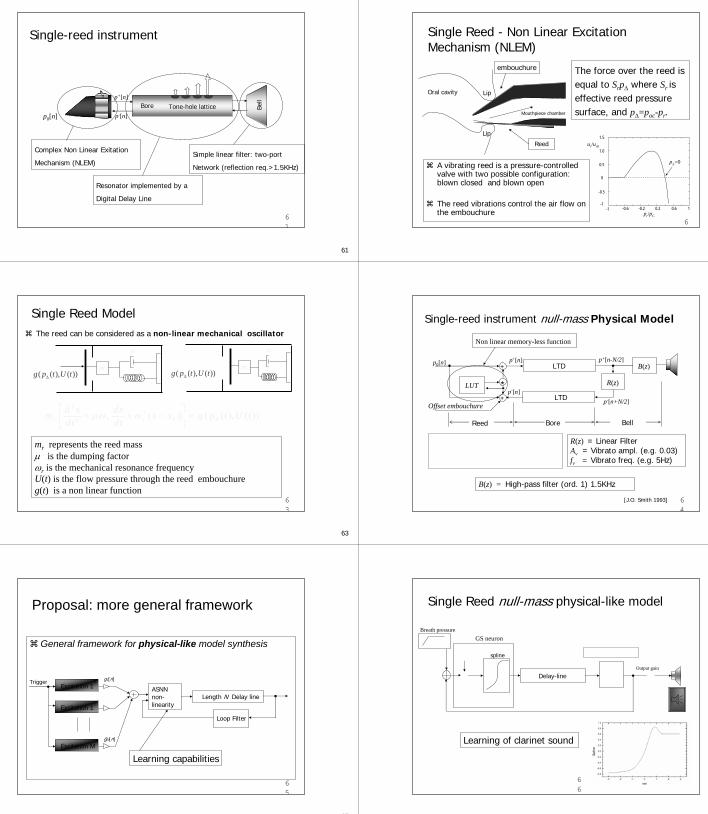
Complex Non Linear Exitation
Mechanism (NLEM)
Bell
Resonator implemented by a
Digital Delay Line
Simple linear filter: two-port
Network (reflection req.>1.5KHz)
Single-reed instrument
61
62
Single Reed - Non Linear Excitation Mechanism (NLEM)
A vibrating reed is a pressure-controlled valve with two possible configuration: blown closed and blown open
The reed vibrations control the air flow on the embouchure
Oral cavity
,r ru p
The force over the reed is equal to Srp∆ where Sr is effective reed pressure surface, and p∆=poc-pr.
Lip
Lip
Reed
embouchure
6
,oc ocu pMouthpiece chamber
-1 -0.6 -0.2 0.2 0.6 1-1
-0.5
0
0.5
1.0
1.5ur/ur0
pr/pC
p∆=0
63
The reed can be considered as a non-linear mechanical oscillator
22
02 ( ) ( ( ), ( ))r r rd x dxm x x g p t U tdt dt
µω ω ∆
⎡ ⎤+ + − =⎢ ⎥
⎣ ⎦
( ( ), ( ))g p t U t∆rm
µ
Single Reed Model
mr represents the reed massµ is the dumping factorωr is the mechanical resonance frequencyU(t) is the flow pressure through the reed embouchureg(t) is a non linear function
( ( ), ( ))g p t U t∆rm
µ
63
64
Single-reed instrument null-mass Physical Model
Offset embouchure
p+[n-N/2]p0[n]+
+
LUT
LTD
LTD
R(z)*
p+[n]
p-[n]
B(z)
p-[n+N/2]
Reed Bore Bell
1
1 ( )( ) ;1 ( )
( ) ( ) 0.642; ( ) sin(2 );v v
a tR za t z
a t v t v t A f tπ
−
+=
+= − =
R(z) = Linear FilterAv = Vibrato ampl. (e.g. 0.03)fv = Vibrato freq. (e.g. 5Hz)
B(z) = High-pass filter (ord. 1) 1.5KHz
[J.O. Smith 1993]
Non linear memory-less function
64
65
Excitation 1
Excitation M
Excitation 1
Proposal: more general framework
General framework for physical-like model synthesis
TriggerASNN non-linearity
Length N Delay line
Loop Filter
g1[n]
gM[n]
Learning capabilities
65
66
Single Reed null-mass physical-like model
⊕
Breath pressureGS neuron
Delay-line
0w
1w
Output gain
1−
spline
( )H z
1( ) 0.5(1 )H z z−= −
Learning of clarinet sound
66

67
w0
z-1
z-1
v2w1
v1
w2
z-1
z-1
w3
w4
DELAY LINEControl points
SPLINEActFunc
Breath Pressure
( )H z
IIR
FIR
One Time-Delay Spline Neuron
1 22 1
2 1 21 2
( )1a a z zH z
a z a z
− −
− −
+ +=
+ +
11( ) 0.5(1 )H z z−= −
Single Reed physical-like model
67
68
Preliminary results: Sax sound
Reed
Delay-line 1 Three-port scattering junction
( )R z
Null-mass model
Learning of clarinet and sax sounds
Sax
Three-port scattering junction
68
Delay-line 2 Delay-line 3
“Chaotic sound” behaviour
69
Preliminary results: Flute Soundembouchure
Control points
SPLINEActFunc
( )H z
Bore delay-line
mz−Breathpressure
Adaptation of the only non linear function spline parameters
69
70
Preliminary results: Trumpet sound
w0
z-1
z-1
v2w1
v1
Breathpressure
Lip filter
Delay line
α
non-linearity
Adaptable parametersα w0 w1 υ1 υ2
70
71
Another approach: additive synthesis controlled by ANN1
sgm
sgm
sgm
sgm
sgm
sgm
Loudness
F0
(1) D. Wessel, C. Drame, M. Wright, CNMAT, Berkeley
a1
a2
f1
f2
Osc.
Osc.
Osc.
Σ
Solo sax
Solo oct2
AOEUI
Suling
p1
p2
pN
fN
aN
The amplitudes and frequencies (ak ,fk) of the oscillators are controlled by a NN.
Additive SynthesizerNeural Controller
71
Note: reproduced sounds by record
72
Audio signal separationBlind separation of linear mixture
( ) = ( ) t t⋅x A s
A
s1(t)
s2(t)
sN(t)
W
x1(t)
x2(t)
xN(t)
u1(t)
u2(t)
uN(t)
g1(u1)
g2(u2)
gN(uN)
y1(t)
y2(t)
yN(t)
Unknown mixing matrix
Independent sources
Observed signals
Un-mixing matrix
Flexible activation function
Neural Network
72
Problem: estimate the un-mixing matrix W such that u(t) = s(t)(several algorithms exist).

73
73
Preliminary: signal separation of post non-linear mixture
post non-linear mixture model
A1,1
A1,2
A1,n
A2,1
A2,2
A2,n
An,1
An,2
An,n
s1(t)
s2(t)
sn(t)
u1(t)
u2(t)
un(t)
f1(.)
f2(.)
fn(.)
x1(t)
x2(t)
xn(t)
f(.)A
s(t) u(t) x(t)
W1,1
W1,2
W1,n
W2,1
W2,2
W2,n
Wn,1
Wn,2
Wn,n
v1(t)
v2(t)
vn(t)
y1(t)
y2(t)
yn(t)
W
v(t) y(t)
g1(.)
g2(.)
gn(.)
x1(t)
x2(t)
xn(t)
g(.)
x(t)
Non linear blind separation structure
,1
( ) = ( ) 1,2,...N
i i i j jj
x t f a s t i M=
⎛ ⎞=⎜ ⎟
⎝ ⎠∑
Flexible spline activation functions
74
Preliminary: signal separation of non-linear mixing
Separation of non-linear mixture
Non linear mixing model
Non linear blind separation structure
c1(t)
c2(t)
cN(t)
x1(t)
x2(t)
xN(t)
c(t) x(t)
f1(.)
f2(.)
fN(.)
u1(t)
u2(t)
uN(t)
f(.)
u(t)
BA
s1(t)
s2(t)
sN(t)
s(t)
v1(t)
v2(t)
vN(t)
y1(t)
y2(t)
yN(t)
v(t) y(t)
g1(.)
g2(.)
gn(.)
r1(t)
r2(t)
rN(t)
g(.)
r(t)
WZ
x1(t)
x2(t)
xN(t)
x(t)
, ,1 1
( ) = ( ) 1,2,...N N
k k i i i j ji j
x t b f a s t k M= =
⎛ ⎞=⎜ ⎟
⎝ ⎠∑ ∑
74
75
Preliminary Results: signal separation of post non-linear mixing
75
x1(t)
x2(t)
x3(t)
x4(t)
y1(t)
y3(t)
y4(t)
y2(t)
1 1
2 22
3 3 3
4 4
( ) = tanh( ( ))( ) = tanh( ( ))
( ) =0.8 ( ) ( )( ) = tanh(0.9 ( ))
x t u tx t u tx t u t u tx t u t
+
0.2811 0.2926 -0.1364 0.4080-0.4608 -0.1232 -0.2025 0.24920.3908 -0.3373 -0.3908 -0.2917-0.4621 -0.4660 -0.4438 -0.3846
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
AA1,1
A1,2
A1,n
A2,1
A2,2
A2,n
An,1
An,2
An,n
s1(t)
s2(t)
sn(t)
u1(t)
u2(t)
un(t)
f1(.)
f2(.)
fn(.)
x1(t)
x2(t)
xn(t)
f(.)A
s(t) u(t) x(t)
W1,1
W1,2
W1,nW2,1
W2,2W2,n
Wn,1
Wn,2
Wn,n
v1(t)
v2(t)
vn(t)
y1(t)
y2(t)
yn(t)
W
v(t) y(t)
g1(.)
g2(.)
gn(.)
x1(t)
x2(t)
xn(t)
g(.)
x(t)
Mixed inputs De-mixed outputs
76
Some conclusions
Dynamic Neural Networks represent a new class of non-liner DSP algorithms
Fast architectures allow real time applications at high throughput rate
Learning algorithms ensure consistent design methods
A huge application fields in audio/sound processing
Neural Networks: general framework for non linear digital sound analysis/synthesis methods
76