short course on aeroelasticity - emerald coast sfte · short course on aeroelasticity; ... ref....
TRANSCRIPT

Short Course on
Aeroelasticity; Theory and PracticePresented at SFTE 2017 International SymposiumThe Henderson Beach ResortDestin, Florida30 October 2017
Vin Sharma, PhD.
Material presented here is extracted from the Aeroelasticity course offered at the University of Florida Inertial Forces
Static:Deformation,Divergence, &
Control ReversalDynamic Instability:
FlutterDynamic Response:
Gust, Buffet;Aeroservoelasticity with
Flight Control System

Topics of Discussion
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 2
Static AeroelasticityWing divergenceAileron reversal & Control surface effectiveness
Dynamic aeroelasticity Flutter
Commercial Software ZAERO and ZEUS; ZONA TechnologyNASTRAN
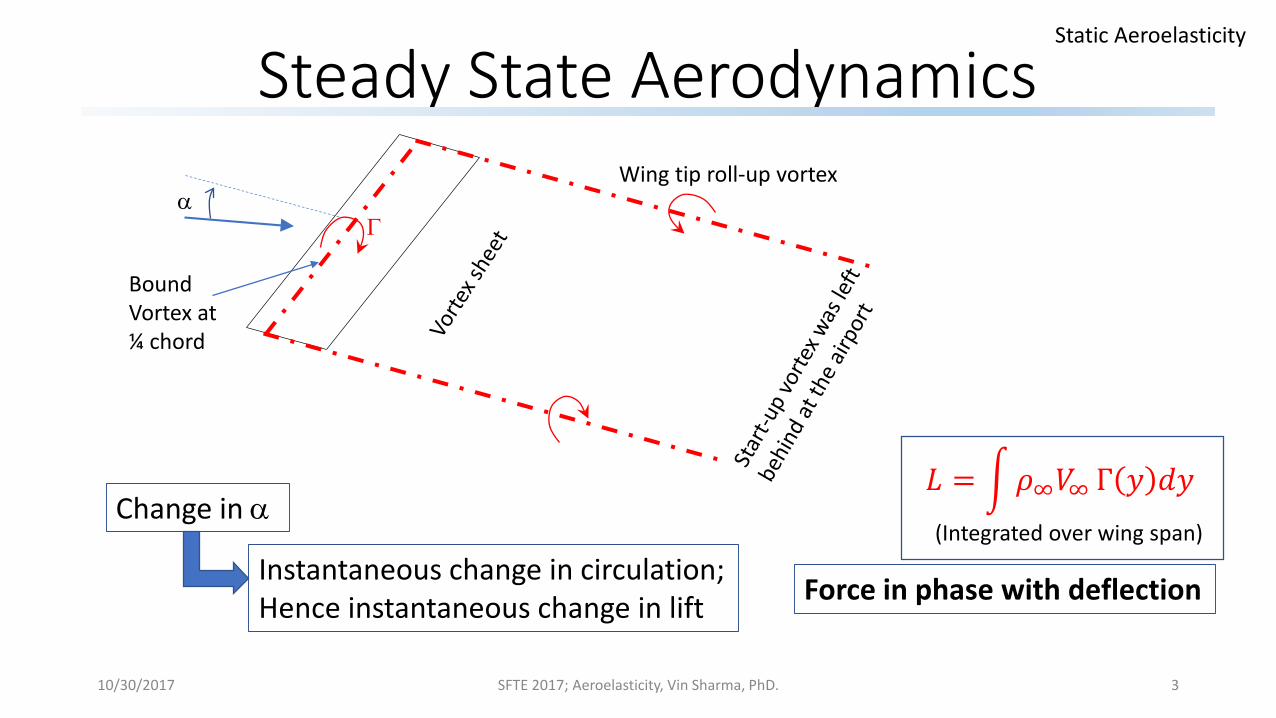
Steady State Aerodynamics
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 3
Force in phase with deflection
Change in α
Instantaneous change in circulation;Hence instantaneous change in lift
αWing tip roll-up vortex
Γ
Bound Vortex at ¼ chord
𝐿𝐿 = �𝜌𝜌∞𝑉𝑉∞ Γ 𝑦𝑦 𝑑𝑑𝑦𝑦(Integrated over wing span)
Static Aeroelasticity

Instability Versus Ineffectiveness
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 4
Divergence is an instability issue; The wing generates more lift due to elastic twist than the structure canresist; For a small input to 𝛼𝛼0, divergence leads to a large angle of twist.
Aileron effectiveness is where the control surface fails to develop the desired increment in lift; above the reversal speed, a control input 𝛿𝛿𝑎𝑎produces lift or moment opposite to that intended.
Study of two static aeroelastic phenomena

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 5
LiftMoment
Wind α0
α0+ψ
δψ
Stable
Divergent
Neutrally Stable
Understanding Wing DivergenceStatic Aeroelasticity

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 6
Wing Divergence SpeedStatic Aeroelasticity
Ref: Prof. Weisshaar’s Aeroelasticity Lecture notes

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 7
Static Aeroelasticity
Z
X
Wind Kα
KZ
L
M¼ chord
𝑧𝑧
ψ𝑧𝑧 + 𝑒𝑒
Elastic deformationat shear center
e
𝑎𝑎
𝛼𝛼0
𝐿𝐿 = 𝑞𝑞𝑞𝑞𝐶𝐶𝐿𝐿𝛼𝛼(𝛼𝛼0 + ψ)Aerodynamic Lift
; =−𝐾𝐾𝑧𝑧 𝑧𝑧 + 𝑒𝑒ψLinear Spring Resistance
𝑀𝑀𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜 = 𝑀𝑀1/4𝑐𝑐 + 𝐿𝐿aAerodynamic Moment Torsion Spring Resistance
= −𝐾𝐾𝛼𝛼ψ− 𝑒𝑒𝐾𝐾𝑧𝑧 𝑧𝑧 + 𝑒𝑒ψ;
2D Section Static Equilibrium

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 8
Static Aeroelasticity
Z
X
Wind Kα
KZ
L
M¼ chord
𝑧𝑧
ψ𝑧𝑧 + 𝑒𝑒ψ
Elastic deformationat shear center
e
𝑎𝑎
𝛼𝛼0
ψ =𝑎𝑎 − 𝑒𝑒 𝑞𝑞𝑞𝑞𝐶𝐶𝐿𝐿𝛼𝛼𝛼𝛼0 + 𝑀𝑀1/4𝑐𝑐
𝐾𝐾𝛼𝛼 − 𝑎𝑎 − 𝑒𝑒 𝑞𝑞𝑞𝑞𝐶𝐶𝐿𝐿𝛼𝛼=
𝐴𝐴𝑒𝑒𝐴𝐴𝐴𝐴𝑑𝑑𝑦𝑦𝐴𝐴𝑎𝑎𝐴𝐴𝐴𝐴𝐴𝐴 𝑇𝑇𝐴𝐴𝐴𝐴𝑞𝑞𝑇𝑇𝑒𝑒𝑅𝑅𝐴𝐴𝑅𝑅𝑎𝑎𝑅𝑅𝐴𝐴𝐴𝐴𝐴𝐴𝑎𝑎𝑅𝑅 𝑞𝑞𝑆𝑆𝐴𝐴𝐴𝐴𝐴𝐴𝑆𝑆 𝑅𝑅𝑎𝑎𝑅𝑅𝑒𝑒
𝑞𝑞𝑑𝑑 =𝐾𝐾𝛼𝛼
𝑎𝑎 − 𝑒𝑒 𝑞𝑞𝐶𝐶𝐿𝐿𝛼𝛼And the divergence dynamic pressure found by setting the denominator to zero:-
Small (a-e) high 𝑞𝑞𝑑𝑑 What happens at (a-e) =0 Can we afford (a-e) <0 ? Increase 𝐾𝐾𝛼𝛼
Elastic Twist & Divergence

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 9
Static Aeroelasticity
Extend 2D Section to 3D Wing
RHS Half wing
Y
X Z
••
Wing elastic axis divided into N element2D formulation extended to 3D: Static equilibrium in matrix form
𝑲𝑲𝒔𝒔�𝝍𝝍 − �𝒒𝒒𝑲𝑲𝑨𝑨�𝝍𝝍 = 𝜶𝜶𝟎𝟎+ 𝑪𝑪𝑴𝑴 �𝒄𝒄 𝟒𝟒
Structural restoring moment
Aerodynamicmoment
Eigenvalue problem for static stability: 𝑲𝑲𝒔𝒔 − �𝒒𝒒𝑲𝑲𝑨𝑨 �𝝍𝝍 =0
o Eigenvalues: 1/divergence pressures; 𝑞𝑞𝐷𝐷o Eigenvectors: Deformed shapes in divergence
𝑲𝑲𝒔𝒔−𝟏𝟏𝑲𝑲𝑨𝑨 −
𝟏𝟏�𝒒𝒒𝑲𝑲𝒔𝒔−𝟏𝟏𝑲𝑲𝒔𝒔 �𝝍𝝍 =0
�𝑲𝑲 − 𝝀𝝀𝑰𝑰 �𝝋𝝋 =0

Loss of Roll Control
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 10
Static Aeroelasticity
Z
Y
X
Decreased Lift
Increased Lift
Elastic wing twist in response to increased pitching moment
TE down aileron deflection increases the camber Increased lift Increased pitching down moment (negative) Supposed to generate the desired rolling moment about x-axis
At critical dynamic pressure, loss of lift due to wing twist counters any lift required due to aileron deflection

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 11
Static Aeroelasticity
Trailing Edge Control Surface
•
𝐿𝐿𝑤𝑤 = 𝑞𝑞𝑞𝑞𝑪𝑪𝑳𝑳𝜶𝜶 𝛼𝛼0 + 𝜑𝜑𝑀𝑀𝑤𝑤 �𝑐𝑐 4
= 𝑞𝑞𝑞𝑞𝐴𝐴𝐶𝐶𝑀𝑀 �𝑐𝑐 4
Note: 𝑀𝑀𝛿𝛿 �𝑐𝑐 4is about the
aerodynamic center of the wing
𝐶𝐶𝐿𝐿𝛿𝛿 =𝜕𝜕𝐶𝐶𝐿𝐿𝜕𝜕𝛿𝛿 𝐶𝐶𝑀𝑀𝛿𝛿 =
𝜕𝜕𝐶𝐶𝑀𝑀𝛿𝛿 �𝑐𝑐 4
𝜕𝜕𝛿𝛿Here
+
•
𝐿𝐿𝑎𝑎 = 𝑞𝑞𝑞𝑞𝐶𝐶𝐿𝐿𝛿𝛿𝛿𝛿𝑎𝑎 𝑀𝑀𝛿𝛿 �𝑐𝑐 4= 𝑞𝑞𝑞𝑞𝐴𝐴𝐶𝐶𝑀𝑀𝛿𝛿𝛿𝛿𝑎𝑎
Increased camber•𝛿𝛿𝑎𝑎

Loss of Aileron Effectiveness
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 12
Static Aeroelasticity
Rate of change of elastic wing lift due to aileron deflection: 𝜕𝜕𝐿𝐿
𝜕𝜕𝛿𝛿𝑎𝑎= 𝑞𝑞𝑞𝑞𝐶𝐶𝐿𝐿𝛿𝛿
1 + 𝑞𝑞𝑞𝑞𝐷𝐷
𝐴𝐴𝑎𝑎𝐶𝐶𝑀𝑀𝛿𝛿𝐶𝐶𝐿𝐿𝛿𝛿
1 − 𝑞𝑞𝑞𝑞𝐷𝐷
Aileron effectiveness is lost when lift becomes insensitive to the aileron
1 +𝑞𝑞𝑞𝑞𝐷𝐷
𝐴𝐴𝑎𝑎𝐶𝐶𝑀𝑀𝛿𝛿𝐶𝐶𝐿𝐿𝛿𝛿
= 0 𝑞𝑞𝑅𝑅 = −𝑞𝑞𝐷𝐷𝑎𝑎𝐶𝐶𝐿𝐿𝛿𝛿𝐴𝐴𝐶𝐶𝑀𝑀𝛿𝛿
𝜕𝜕𝐿𝐿𝑒𝑒𝑒𝑒𝑎𝑎𝑒𝑒𝑒𝑒𝑜𝑜𝑐𝑐𝜕𝜕𝛿𝛿𝑎𝑎
= 𝑞𝑞𝑞𝑞𝐶𝐶𝐿𝐿𝛿𝛿1 − 𝑞𝑞
𝑞𝑞𝑅𝑅1 − 𝑞𝑞
𝑞𝑞𝐷𝐷
𝜂𝜂 =1 − 𝑞𝑞
𝑞𝑞𝑅𝑅1 − 𝑞𝑞
𝑞𝑞𝐷𝐷
Aileron Efficiency

�𝑞𝑞 =𝑞𝑞𝑞𝑞𝐷𝐷
𝑅𝑅 =𝑞𝑞𝑅𝑅𝑞𝑞𝐷𝐷
Let:
&
Aileron Efficiency
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 13
𝜂𝜂 =1 − �𝑞𝑞
𝑅𝑅1 − �𝑞𝑞
R=0.1
R=2.0
R=1.0
Aileron Effectiveness is lost at 𝜂𝜂 =0
Aileron Reversal Zone
Where does aileron reversal occur? R<1 𝜂𝜂 <0
What R to choose for a new wing?
Passively safe design: 𝑅𝑅 > ?Active control design: 𝑅𝑅 < 1
Ref: Problem 6., Chapter 3, ‘Intro to Struc. Dyn. And Aeroelasticity’, Hodges and Pierce
Static Aeroelasticity

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 14
Taking Advantage of Wing TwistActive Aeroelastic Wing (AAW) Program; X-53; Modified F-18
e
Static Aeroelasticity

Tailored Composite Wing
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 15

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 16
Stability of a Dynamic System𝑞𝑞(𝑅𝑅) = 𝐴𝐴1𝑒𝑒𝑒𝑒1𝑒𝑒 + 𝐴𝐴2𝑒𝑒𝑒𝑒2𝑒𝑒General solution: = 𝐴𝐴1𝑒𝑒(𝛼𝛼+𝑜𝑜𝛽𝛽)𝑒𝑒 + 𝐴𝐴2𝑒𝑒(𝛼𝛼−𝑜𝑜𝛽𝛽)𝑒𝑒
Complex conjugate pair of root, 𝑠𝑠1,2 = 𝛼𝛼 ± 𝐴𝐴𝛽𝛽
Re(s)
Im(s)
StableLeft HalfPlane
UnstableRight Half Plane
•
NeutrallyStable𝛼𝛼=0; Zero
Damping
𝛼𝛼 >0
𝛼𝛼 <0𝐴𝐴𝑒𝑒𝛼𝛼𝑒𝑒
•
Divergent 𝛼𝛼>0 and𝛽𝛽=0
Reference: Section 3.3 of ‘Fundamentals of Structural Dynamics’, Roy R. Craig Jr., Andrew J. Kurdila, John Wiley & Sons, INC. 2nd Edition
Dynamic Aeroelasticity

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 17
2 DOF Wing Section Dynamics
𝑀𝑀 −𝑒𝑒𝑀𝑀−𝑒𝑒𝑀𝑀 𝐼𝐼𝑐𝑐𝑜𝑜 + 𝑒𝑒2𝑀𝑀
��𝑞1��𝑞2
+𝐾𝐾𝑧𝑧 −𝐴𝐴𝐾𝐾𝑧𝑧−𝐴𝐴𝐾𝐾𝑧𝑧 𝐾𝐾𝜑𝜑 + 𝐴𝐴2𝐾𝐾𝑧𝑧
𝑞𝑞1𝑞𝑞2 = 0
0
e = cg offset from the y-axis; positive along x-axisc = elastic axis offset from the y-axis; positive along x-axis
M��𝑞 + 𝐾𝐾𝑞𝑞 = 0Free response equations:
•
Z
X
𝑞𝑞2𝑞𝑞1
Net deformation at Elastic Center= (𝑞𝑞1 −𝐴𝐴𝑞𝑞2)
Net deformationat cg = (𝑞𝑞1 −𝑒𝑒𝑞𝑞2);velocity = ��𝑞1 −𝑒𝑒��𝑞2)
Z
X
Kϕ
KZb
𝑀𝑀, 𝐼𝐼𝑐𝑐𝑜𝑜c
e
•
Dynamic equations of motionfor free vibration:
Dynamic Aeroelasticity

Modal Domain Forced EOM
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 18
𝑀𝑀 �𝑞𝑞 + 𝐶𝐶 �𝑞𝑞 + 𝐾𝐾 �𝑞𝑞 = 𝑓𝑓 𝑅𝑅
Dynamic equations of motion of a damped system:
Using modal superposition : �𝑞𝑞 𝑅𝑅 = �𝑜𝑜−1
𝑜𝑜
𝜙𝜙𝑜𝑜𝜂𝜂𝑜𝑜 𝑅𝑅 = 𝝓𝝓𝝓𝝓 𝑅𝑅
(n x 1) (n x n) (n x 1)
𝜙𝜙𝑇𝑇 𝐴𝐴 𝜙𝜙��𝜂 𝑅𝑅 + 𝜙𝜙𝑇𝑇 𝐴𝐴 𝜙𝜙��𝜂 𝑅𝑅 + 𝜙𝜙𝑇𝑇 𝑘𝑘 𝜙𝜙𝜂𝜂 𝑅𝑅 = 𝜙𝜙𝑇𝑇 𝑓𝑓 𝑅𝑅
𝐺𝐺𝑀𝑀 ��𝜂 + 𝐺𝐺𝐶𝐶 ��𝜂 + 𝐺𝐺𝐾𝐾 𝜂𝜂 = 𝐺𝐺𝐺𝐺
Unsteady aerodynamics will be introduced via generalized force (GF)
Dynamic Aeroelasticity

Unsteady Aerodynamics
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 19
α(t)
Γ+∆Γ∆Γ
Oscillatory change in circulation
Oscillatory lift
Phase delay in lift due to: Induced AOA due to
normal velocity and angular velocity
downwash from shed vortices
Dynamic Aeroelasticity
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 20
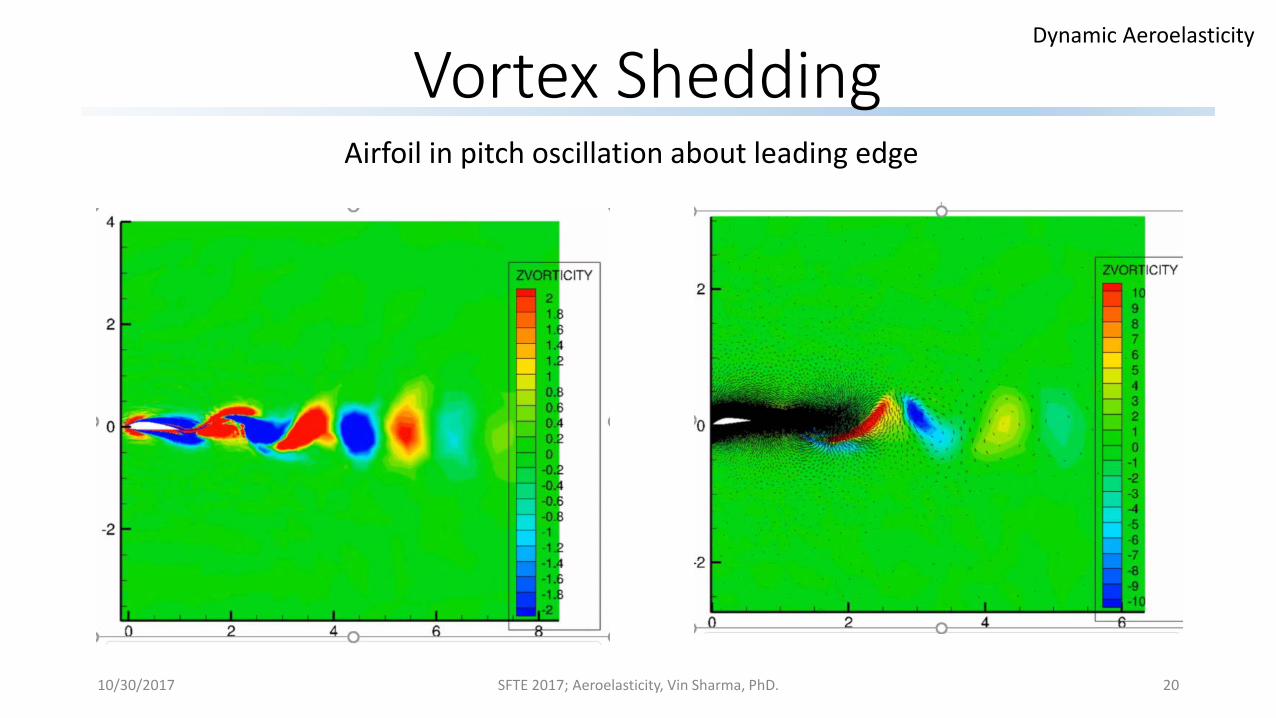
Vortex SheddingAirfoil in pitch oscillation about leading edge
Dynamic Aeroelasticity

Quasi-Steady Aero
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 21
VX
Z
zα••
𝐶𝐶𝐿𝐿 =𝜕𝜕𝐶𝐶𝐿𝐿𝜕𝜕α
α +1𝑉𝑉𝑑𝑑𝑧𝑧𝑑𝑑𝑅𝑅
+𝑏𝑏2𝑉𝑉
𝑑𝑑α𝑑𝑑𝑅𝑅
𝐶𝐶𝑀𝑀 𝐿𝐿.𝐸𝐸. = −𝐴𝐴𝜋𝜋8𝑉𝑉
𝑑𝑑α𝑑𝑑𝑅𝑅
−𝐴𝐴4𝐶𝐶𝐿𝐿
Ref. Section 6, ‘An introduction to the theory of aeroelasticity’, Y.C. Fung
Lift attributed to circulation or vorticity; No effect of shed vortices in Quasi-Steady Aero
Dynamic Aeroelasticity

Quasi-steady Aero and SHM
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 22
𝑧𝑧 = 𝑧𝑧0𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒
α = α0𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒
𝐶𝐶𝐿𝐿 =𝜕𝜕𝐶𝐶𝐿𝐿𝜕𝜕𝛼𝛼
α +1𝑉𝑉𝑑𝑑𝑧𝑧𝑑𝑑𝑅𝑅
+𝑏𝑏2𝑉𝑉
𝑑𝑑α𝑑𝑑𝑅𝑅
��𝑧 = 𝐴𝐴𝜔𝜔𝑧𝑧0𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒
α = 𝐴𝐴𝜔𝜔α0𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒
𝐶𝐶𝐿𝐿 =𝜕𝜕𝐶𝐶𝐿𝐿𝜕𝜕α
α0 + 𝐴𝐴𝜔𝜔𝑏𝑏𝑉𝑉𝑏𝑏
𝑧𝑧0 + 𝐴𝐴𝜔𝜔𝑏𝑏2𝑉𝑉
α0 𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒
𝐶𝐶𝐿𝐿 =𝜕𝜕𝐶𝐶𝐿𝐿𝜕𝜕α
α0 + 𝐴𝐴𝑘𝑘𝑏𝑏𝑧𝑧0 + 𝐴𝐴
𝑘𝑘2α0 𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒
𝑘𝑘 =𝜔𝜔𝑏𝑏𝑉𝑉
Introducing reduced frequency
�𝛼𝛼 𝑅𝑅 = α0 + 𝐴𝐴𝑘𝑘𝑏𝑏𝑧𝑧0 + 𝐴𝐴
𝑘𝑘2α0 𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒Net induced angle of
attack at ¾ chord:
Dynamic Aeroelasticity
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 23
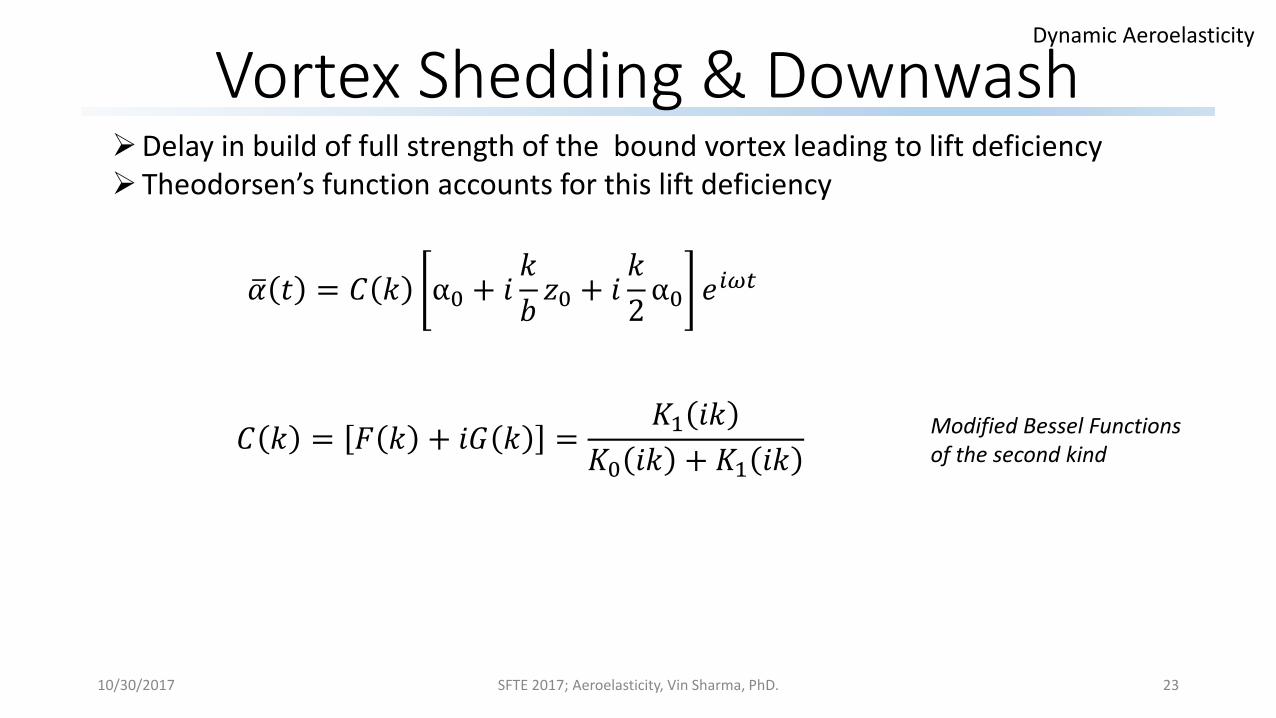
Vortex Shedding & DownwashDelay in build of full strength of the bound vortex leading to lift deficiencyTheodorsen’s function accounts for this lift deficiency
�𝛼𝛼 𝑅𝑅 = 𝐶𝐶 𝑘𝑘 α0 + 𝐴𝐴𝑘𝑘𝑏𝑏𝑧𝑧0 + 𝐴𝐴
𝑘𝑘2α0 𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒
𝐶𝐶 𝑘𝑘 = 𝐺𝐺 𝑘𝑘 + 𝐴𝐴𝐺𝐺 𝑘𝑘 =𝐾𝐾1 𝐴𝐴𝑘𝑘
𝐾𝐾0 𝐴𝐴𝑘𝑘 + 𝐾𝐾1 𝐴𝐴𝑘𝑘Modified Bessel Functions of the second kind
Dynamic Aeroelasticity

Theodorsen’s Funct. Mag & Phase
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 24
𝐶𝐶 𝑘𝑘 = 𝐺𝐺 𝑘𝑘 + 𝐴𝐴𝐺𝐺 𝑘𝑘 =𝐾𝐾1 𝐴𝐴𝑘𝑘
𝐾𝐾0 𝐴𝐴𝑘𝑘 + 𝐾𝐾1 𝐴𝐴𝑘𝑘
Dynamic Aeroelasticity
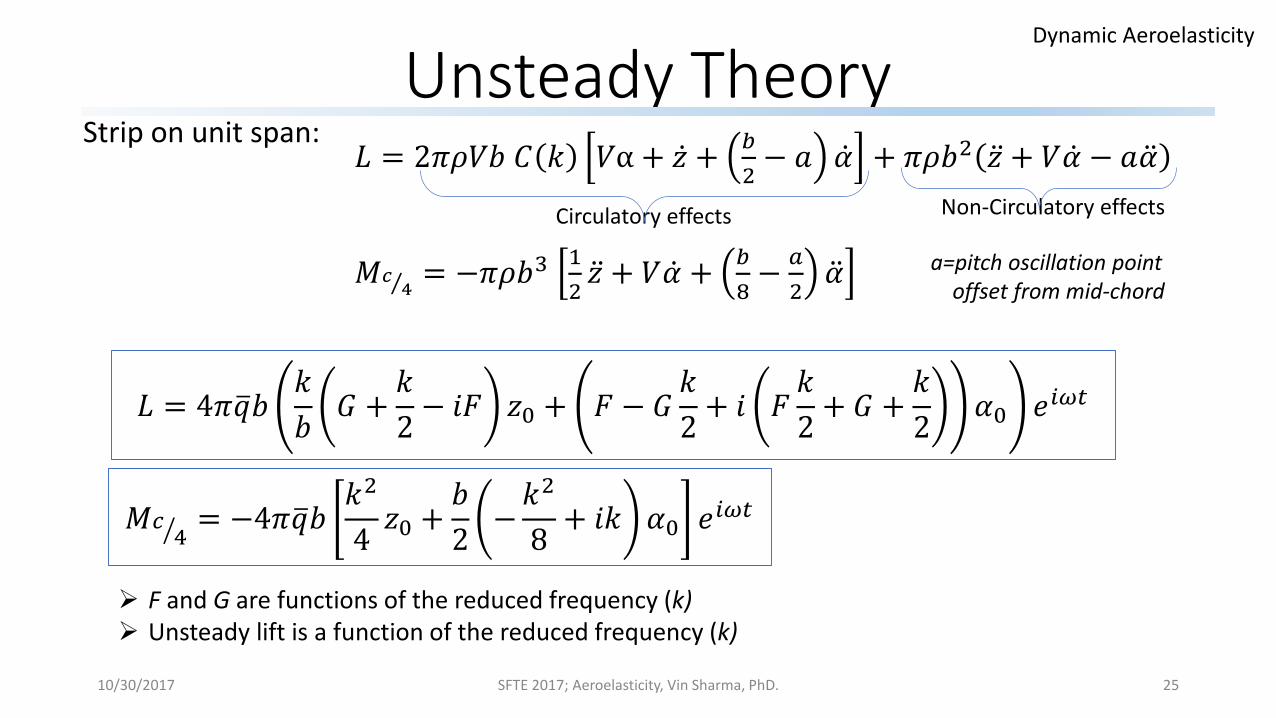
Unsteady Theory
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 25
𝐿𝐿 = 2𝜋𝜋𝜌𝜌𝑉𝑉𝑏𝑏 𝐶𝐶 𝑘𝑘 𝑉𝑉α + ��𝑧 + 𝑏𝑏2− 𝑎𝑎 ��𝛼 + 𝜋𝜋𝜌𝜌𝑏𝑏2 ��𝑧 + 𝑉𝑉��𝛼 − 𝑎𝑎��𝛼
𝑀𝑀 ⁄𝑐𝑐 4 = −𝜋𝜋𝜌𝜌𝑏𝑏3 12��𝑧 + 𝑉𝑉��𝛼 + 𝑏𝑏
8− 𝑎𝑎
2��𝛼
Circulatory effects Non-Circulatory effects
a=pitch oscillation pointoffset from mid-chord
Strip on unit span:
𝑀𝑀 �𝑐𝑐 4= −4𝜋𝜋�𝑞𝑞𝑏𝑏
𝑘𝑘2
4𝑧𝑧0 +
𝑏𝑏2
−𝑘𝑘2
8+ 𝐴𝐴𝑘𝑘 𝛼𝛼0 𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒
𝐿𝐿 = 4𝜋𝜋�𝑞𝑞𝑏𝑏𝑘𝑘𝑏𝑏
𝐺𝐺 +𝑘𝑘2− 𝐴𝐴𝐺𝐺 𝑧𝑧0 + 𝐺𝐺 − 𝐺𝐺
𝑘𝑘2
+ 𝐴𝐴 𝐺𝐺𝑘𝑘2
+ 𝐺𝐺 +𝑘𝑘2
𝛼𝛼0 𝑒𝑒𝑜𝑜𝜔𝜔𝑒𝑒
F and G are functions of the reduced frequency (k) Unsteady lift is a function of the reduced frequency (k)
Dynamic Aeroelasticity

Unsteady Force in Matrix Form
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 26
𝑓𝑓 = 𝐿𝐿𝑀𝑀 = 4𝜋𝜋�𝑞𝑞𝑏𝑏
𝑘𝑘𝑏𝑏
𝐺𝐺 +𝑘𝑘2− 𝐴𝐴𝐺𝐺 𝐺𝐺 − 𝐺𝐺
𝑘𝑘2
+ 𝐴𝐴 𝐺𝐺𝑘𝑘2
+ 𝐺𝐺 +𝑘𝑘2
−𝑘𝑘2
4−𝑏𝑏2
−𝑘𝑘2
8+ 𝐴𝐴𝑘𝑘
𝑧𝑧𝛼𝛼
𝑓𝑓 = 𝐿𝐿𝑀𝑀 = 4𝜋𝜋�𝑞𝑞𝑏𝑏 𝐴𝐴𝐼𝐼𝐶𝐶 𝑧𝑧
𝛼𝛼
AIC(1,1) = 𝜕𝜕𝐿𝐿𝜕𝜕𝑧𝑧
AIC(1,2) = 𝜕𝜕𝐿𝐿𝜕𝜕𝛼𝛼
AIC(2,1) = 𝜕𝜕𝑀𝑀𝜕𝜕𝑧𝑧
AIC(2,2) = 𝜕𝜕𝑀𝑀𝜕𝜕𝛼𝛼
The coefficients of AIC represent aerodynamic force or moment derivatives with respect to the deflection of the airfoil
Dynamic Aeroelasticity
Flutter EOM & Solution
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 27
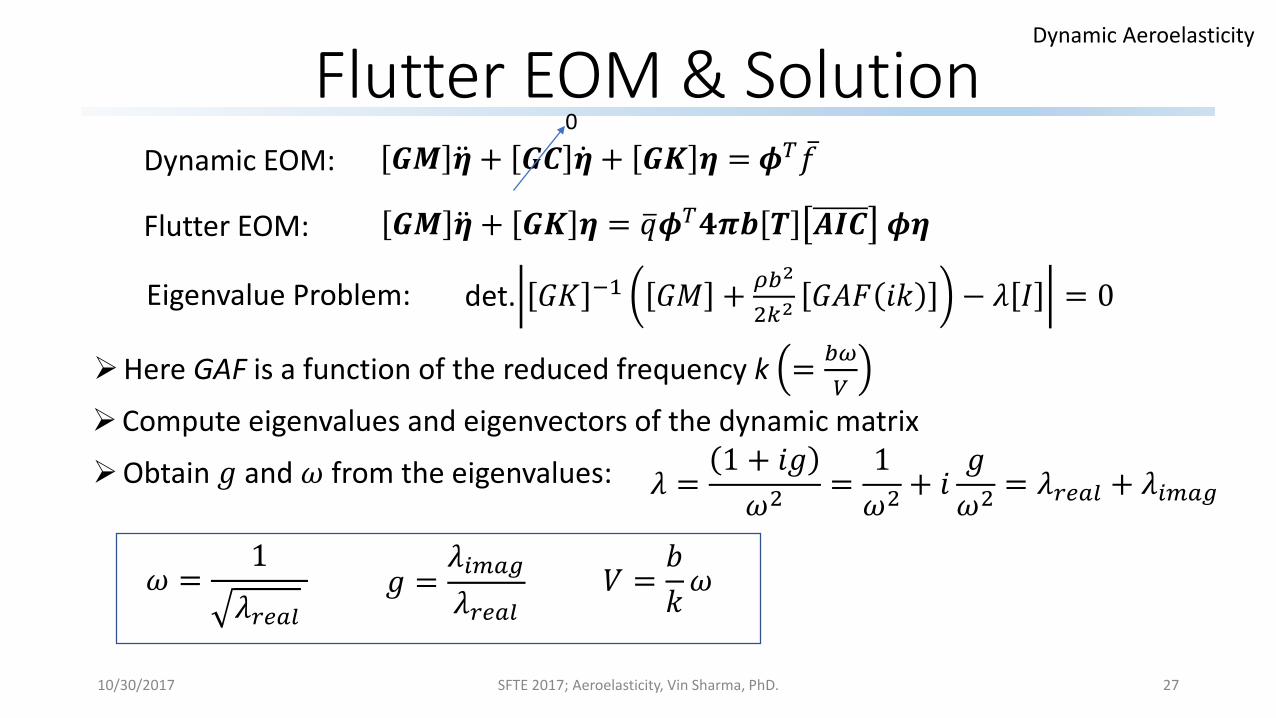
𝑮𝑮𝑴𝑴 ��𝝓 + 𝑮𝑮𝑲𝑲 𝝓𝝓 = �𝑞𝑞𝝓𝝓𝑇𝑇𝟒𝟒𝝅𝝅𝝅𝝅 𝑻𝑻 𝑨𝑨𝑰𝑰𝑪𝑪 𝝓𝝓𝝓𝝓
𝑮𝑮𝑴𝑴 ��𝝓 + 𝑮𝑮𝑪𝑪 ��𝝓 + 𝑮𝑮𝑲𝑲 𝝓𝝓 = 𝝓𝝓𝑇𝑇 𝑓𝑓0
Dynamic Aeroelasticity
det. 𝐺𝐺𝐾𝐾 −1 𝐺𝐺𝑀𝑀 + 𝜌𝜌𝑏𝑏2
2𝑘𝑘2𝐺𝐺𝐴𝐴𝐺𝐺 𝐴𝐴𝑘𝑘 − 𝜆𝜆 𝐼𝐼 = 0
Dynamic EOM:
Flutter EOM:
Eigenvalue Problem:
Here GAF is a function of the reduced frequency k = 𝑏𝑏𝜔𝜔𝑉𝑉
Obtain 𝑆𝑆 and 𝜔𝜔 from the eigenvalues: 𝜆𝜆 =1 + 𝐴𝐴𝑆𝑆𝜔𝜔2 =
1𝜔𝜔2 + 𝐴𝐴
𝑆𝑆𝜔𝜔2 = 𝜆𝜆𝑜𝑜𝑒𝑒𝑎𝑎𝑒𝑒 + 𝜆𝜆𝑜𝑜𝑖𝑖𝑎𝑎𝑜𝑜
Compute eigenvalues and eigenvectors of the dynamic matrix
𝜔𝜔 =1𝜆𝜆𝑜𝑜𝑒𝑒𝑎𝑎𝑒𝑒
𝑆𝑆 =𝜆𝜆𝑜𝑜𝑖𝑖𝑎𝑎𝑜𝑜𝜆𝜆𝑜𝑜𝑒𝑒𝑎𝑎𝑒𝑒
𝑉𝑉 =𝑏𝑏𝑘𝑘𝜔𝜔
Flutter Equation of Motion
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 28
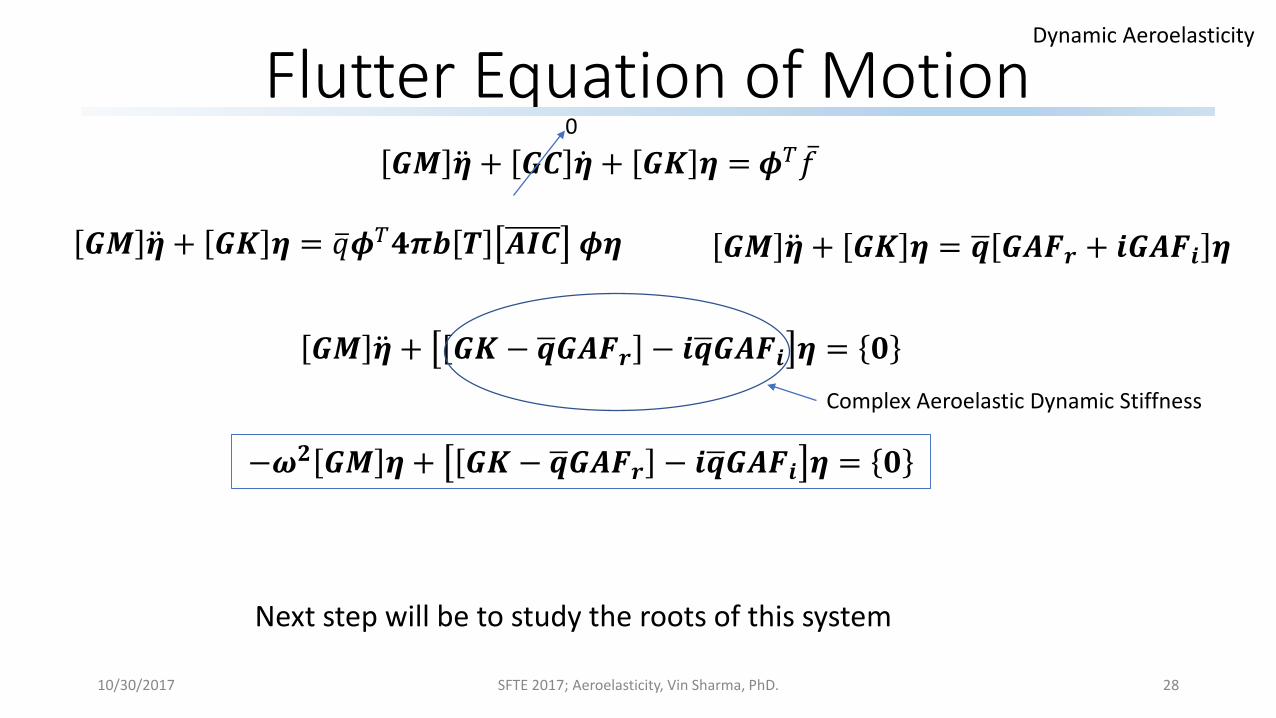
𝑮𝑮𝑴𝑴 ��𝝓 + 𝑮𝑮𝑲𝑲 𝝓𝝓 = �𝑞𝑞𝝓𝝓𝑇𝑇𝟒𝟒𝝅𝝅𝝅𝝅 𝑻𝑻 𝑨𝑨𝑰𝑰𝑪𝑪 𝝓𝝓𝝓𝝓
𝑮𝑮𝑴𝑴 ��𝝓 + 𝑮𝑮𝑪𝑪 ��𝝓 + 𝑮𝑮𝑲𝑲 𝝓𝝓 = 𝝓𝝓𝑇𝑇 𝑓𝑓0
𝑮𝑮𝑴𝑴 ��𝝓 + 𝑮𝑮𝑲𝑲 𝝓𝝓 = �𝒒𝒒 𝑮𝑮𝑨𝑨𝑮𝑮𝒓𝒓 + 𝒊𝒊𝑮𝑮𝑨𝑨𝑮𝑮𝒊𝒊 𝝓𝝓
Complex Aeroelastic Dynamic Stiffness
𝑮𝑮𝑴𝑴 ��𝝓 + 𝑮𝑮𝑲𝑲 − �𝒒𝒒𝑮𝑮𝑨𝑨𝑮𝑮𝒓𝒓 − 𝒊𝒊�𝒒𝒒𝑮𝑮𝑨𝑨𝑮𝑮𝒊𝒊 𝝓𝝓 = 𝟎𝟎
Next step will be to study the roots of this system
Dynamic Aeroelasticity
−𝝎𝝎𝟐𝟐 𝑮𝑮𝑴𝑴 𝝓𝝓 + 𝑮𝑮𝑲𝑲 − �𝒒𝒒𝑮𝑮𝑨𝑨𝑮𝑮𝒓𝒓 − 𝒊𝒊�𝒒𝒒𝑮𝑮𝑨𝑨𝑮𝑮𝒊𝒊 𝝓𝝓 = 𝟎𝟎

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 29
Unsteady aero force vector provides the forcing function o An airfoil of flat plate typeo Strip theory; each strip independent of the others (aerodynamically)o Simple harmonic motiono Two degrees of freedom model; plunge and pitcho Origin at mid-chord
Dynamic equations of motion in generalized modal coordinate systemGeneralize the forcing function Formulate a new eigenvalue problem with complex coefficients Solve for complex eigenvalues and eigenvectorsObtain the frequencies and associated damping ratios as a function of velocityDetermine the flutter instability by observing damping going from negative to
positive at the flutter speedCompute the complex flutter mode shape
Big Picture of Flutter AnalysisDynamic Aeroelasticity

10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 30
Dynamic Aeroelasticity
Flutter Analysis ExampleZ
X
Kϕ
KZ
2-D Wing Section Model of unit span
b
𝑀𝑀, 𝐼𝐼𝑐𝑐𝑜𝑜c
e
•
M= 4.0/386 lb-sec^2/in of unit spanIcg = 0.3454 lb-sec^2-in about cg, per unit spanc_bar = 20 inches chordc = -0.35, fraction of semi-chord b; elastic axis locatione = -0.35, fraction of semi-chord; cg of the sectionKz=2.0 lbf/in; vertical spring rateKrot= 300.0 in-lb/rad; rotation spring raterho_SL = 1.146E-7 lbs-sec^2/in^4, Air mass density at sea level
Mode Shapes

Flutter Analysis
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 31
Dynamic Aeroelasticity
2nd mode becomes unstable
What is thesignificanceof the frequency
dropping to zero?

Flutter Analysis Results
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 32
Dynamic Aeroelasticity

Aeroelastic System Excitation
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 33
Dynamic Aeroelasticity
𝑮𝑮𝑴𝑴 ��𝝓 + 𝑮𝑮𝑲𝑲 𝝓𝝓 = �𝑞𝑞 𝑮𝑮𝑨𝑨𝑮𝑮 𝝓𝝓 + 𝝓𝝓𝑇𝑇 𝑻𝑻𝑮𝑮 𝑮𝑮 External Force
−𝜔𝜔2 𝐺𝐺𝑀𝑀 + 𝐺𝐺𝐾𝐾 − �𝑞𝑞 𝐺𝐺𝐴𝐴𝐺𝐺 𝐴𝐴𝑘𝑘 𝜂𝜂 = 𝝓𝝓𝑇𝑇 𝑻𝑻𝑮𝑮 𝑩𝑩 𝐺𝐺0
𝑀𝑀𝐾𝐾𝐴𝐴 𝜂𝜂 = 𝝓𝝓𝑇𝑇 𝑻𝑻𝑮𝑮 𝑩𝑩 𝐺𝐺0
𝜂𝜂𝐺𝐺0
= 𝑀𝑀𝐾𝐾𝐴𝐴 −𝟏𝟏𝝓𝝓𝑇𝑇 𝑻𝑻𝑮𝑮 𝑩𝑩200
0
Velocity (Knots)
1 150
2
Frequency (Hz.)
3
4
5
2
1006
Mag
(Fre
q R
esp)
4
6
Vertical deformation at mid-chord of the 2D wing section
Transform From modal to physical domain using modal superposition

Flutter Determinant Approach
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 34
Dynamic Aeroelasticity
𝑆𝑆2 𝐺𝐺𝑀𝑀 + 𝐺𝐺𝐾𝐾 − �𝑞𝑞 𝐺𝐺𝐴𝐴𝐺𝐺 𝜂𝜂 = 0
𝐺𝐺𝑀𝑀 ��𝜂 + 𝐺𝐺𝐾𝐾 𝜂𝜂 = �𝑞𝑞 𝐺𝐺𝐴𝐴𝐺𝐺 𝜂𝜂
𝑆𝑆 ≡𝑑𝑑𝑑𝑑𝑅𝑅 ��𝝓 = 𝑆𝑆2 𝝓𝝓
Non-trivial solution: det 𝑆𝑆2 𝐺𝐺𝑀𝑀 + 𝐺𝐺𝐾𝐾 − �𝑞𝑞 𝐺𝐺𝐴𝐴𝐺𝐺 = 0
p is of the form 𝑆𝑆 = 𝛾𝛾𝜔𝜔 + 𝐴𝐴𝜔𝜔

Zeros of Flutter Determinant
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 35
Dynamic Aeroelasticity
VV
Root Locus Plot
Commercial Software
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 36
Aeroelasticity
NASTRAN Doublet Lattice Unsteady Aero K-method P-K Method Flutter Analysis
ZONA Technologies ZAERO and ZEUS Flutter Solution Frequency Response Analysis Aeroservoelastic Analysis
References
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 37
Aeroelasticity
‘Introduction to Aircraft Aeroelasticity and Loads’, Jan Wright and Jonathan Cooper, John Wiley & Sons
‘Introduction to Structural Dynamics and Aeroelasticity’, Hodges & Pierce; Cambridge University Press
‘An Introduction to the Theory of Aeroelasticity’, YC Fung; Dover Publications ‘Aeroelasticity’, Bisplinghoff, Ashley, & Halfman; Addison Wesley Publishing Company ‘Introduction to the study of Aircraft Vibration and Flutter’, Scanlan and Rosenbaum; The
McMillan Company ‘Theoretical and Computational Aeroelasticity’, Rodden ‘Fundamentals of Structural Dynamics’, Roy Craig, Andrew Kurdila; John Wiley & Sons Prof. Weisshaar’s Aeroelasticity class notes

Backup Slides
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 38
Aeroelasticity
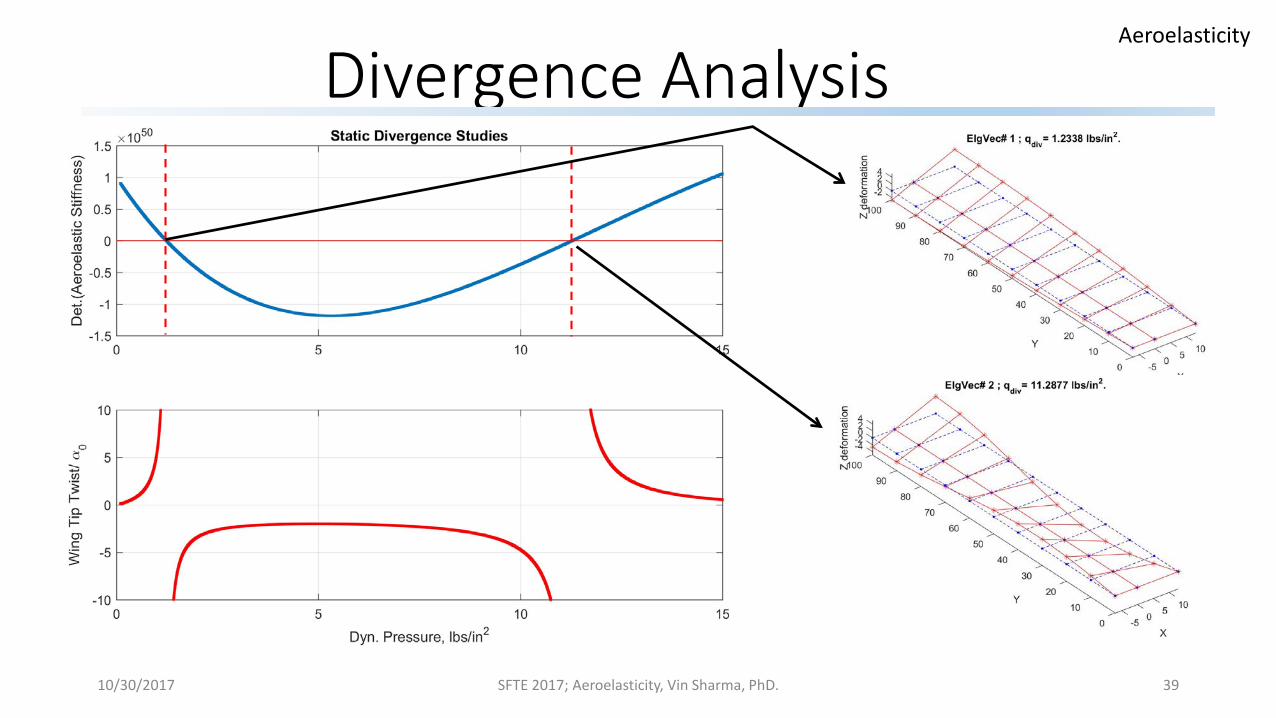
Divergence Analysis
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 39
Aeroelasticity

Backup Slides
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 40
Aeroelasticity
Backup Slides
10/30/2017 SFTE 2017; Aeroelasticity, Vin Sharma, PhD. 41
Aeroelasticity