sampling dynamic ocean fields - uc3magolaya/download/papers/joe-12.pdf · sampling dynamic ocean...
TRANSCRIPT

1
An On-line Utility based Approach for
Sampling Dynamic Ocean Fields
Angel Garcıa-Olaya, Frederic Py, Jnaneshwar Das, Kanna Rajan
Abstract
The coastal ocean is a dynamic and complex environment due to the confluence of atmospheric,
oceanographic, estuarine/riverine, and land-sea interactions. Yet it continues to be under-sampled result-
ing in poor understanding of dynamic, episodic and complex phenomena such as harmful algal blooms,
anoxic zones, coastal plumes, thin layers and frontal zones. Often these phenomena have no viable
biological or computational models which can provide guidance for sampling. Returning targeted water
samples for analysis, becomes critical for biologists to assimilate data for model synthesis. In our work,
Garcıa-Olaya’s work was partially funded by the Spanish Government (MICIIN) under project TIN2008-06701-C03-03. The
work of J. Das was supported in part by the National Oceanic and Atmospheric Administration (NOAA) Monitoring and Event
Response for Harmful Algal Blooms (MERHAB) program under Grant NA05NOS4781228, by the National Science Foundation
(NSF) as part of the Center for Embedded Networked Sensing (CENS) under Grant CCR-0120778, by the NSF under Grants
CNS-0520305 and CNS-0540420, by the Ofce of Naval Research (ONR) Multidisciplinary University Research Initiative (MURI)
program under Grants N00014-09-1-1031 and N00014-08-1-0693. Py and Rajan are funded by a block grant from the Packard
Foundation to MBARI.
A. Garcıa-Olaya is with the Department of Computer Science, Universidad Carlos III de Madrid, Leganes 28911 Spain (email:
F. Py and K. Rajan are with the Monterey Bay Aquarium Research Institute, Moss Landing, CA 95039 USA (email: {fpy,
kanna.rajan}@mbari.org)
J. Das is with the Dept. of Computer Science, Univ. of Southern California, Los Angeles, CA 90089 USA
(email:[email protected])
August 23, 2012 DRAFT

2the scientific emphasis on building a species distribution model necessitates spatially distributed sample
collection from within hot-spots in a large volume of a dynamic field of interest. To do so, we propose
an autonomous approach to sample acquisition based on an on-line calculation of sample utility. A series
of reward functions provide a balance between temporal and spatial scales of oceanographic sampling
and does so in such a way that science preferences or evolving knowledge about the feature of interest
can be incorporated in the decision process. This utility calculation is undertaken onboard a powered
autonomous underwater vehicle (AUV) with specialized water samplers for the upper water-column. For
validation, we provide experimental results using archival AUV data along with an at-sea demonstration
in Monterey Bay, California.
Index Terms
Sampling, Autonomy, Autonomous Underwater Vehicles.
I. INTRODUCTION
Many of the complex multi-disciplinary phenomena in the ocean that scientists seek to un-
derstand, such as algal or phytoplankton blooms, sediment transport processes and riverine and
estuarine plumes, have uncertain spatial and temporal expressions. Recently, novel approaches to
sampling have explored using cost-effective and capable robotic platforms such as autonomous
underwater vehicles (AUVs) [41]. These vehicles can support a diverse array of sensors to resolve
interacting physical, chemical and biological phenomena. To get an informed view of this world,
scientists need to obtain water samples from within targeted features of interest for shore-side
analysis. Traditionally this has been undertaken using ship-based approaches. At the Monterey
Bay Aquarium Research Institute (MBARI) our Dorado AUV platform has been outfitted with
a number of water samplers [5] (Fig. 1), with each canister used at most once during the course
of a mission. While this has provided the required capability to return water samples, it poses
the additional challenge of ensuring that water samples returned are taken within these features
August 23, 2012 DRAFT

3
Fig. 1: MBARIs Dorado AUV (left) with its Gulper water samplers (right)
of interest. Doing so enables biologists to construct species distribution models where potential
genetic variations can be captured.
The challenge we address in this paper is to return water samples effectively from locations
near the centroid or boundary of the feature, or control samples from the ambient environment.
And to do so with a limited number of samplers while respecting spatial sampling constraints.
The scientific intent of such sample return is to build models for microorganism species distri-
bution and abundance. Returning water samples provides the necessary molecular methods with
appropriate data. This is the first of many stages in understanding the distribution, community
structure and the phylogenesis of marine phyto and zoo plankton, which are often at the bottom
of the food chain [42], [14], [44]. The technical challenge is further amplified by the fact that
we have no a priori models to guide our robotic sampling, in missions that last hours and cover
several km2.
The field to be sampled is dynamic and unknown a priori and the need to balance competing
demands of maximizing science return with sampling constraints often forms the core of how one
measures utility in this domain. For instance, triggering a water sampler early in the mission might
have less utility given the future promise of a stronger feature signal. Conversely, attempting to
postpone sample acquisition towards the end of the mission might result in over-sampling or
August 23, 2012 DRAFT

4alternatively returning with unused samplers; spatially distributed samples are therefore highly
desirable. Often these sampling goals are soft constraints [2], [6] reflecting an ’intent’ rather
than a hard requirement; for example oceanographers would prefer that samples be returned even
when sensors detect a weak feature signal over the course of the mission.
The novelty of our work, is in providing a framework based on the calculation of sample utility
by capturing preferences and constraints, which provide a balance between temporal and spatial
scales of oceanographic sampling. Our approach integrates available information a priori and does
so in such a way that science preferences or evolving knowledge about the feature of interest can
be incorporated easily. The resulting techniques can be applied to any sequential sampling schema
with any level of information about the feature; from having substantial information in real-time,
to having only an approximate model description, allowing an oceanographer to choose from a
variety of utility functions depending on scientific needs and expected oceanographic conditions.
The chosen functions are then installed into our onboard deliberative control system T-REX [31],
[30], [36] to make effective use of AUV sampling missions. Details of the T-REX system and its
interface to the utility functions are outside the scope of this paper. Utility impacts deliberation
and not vice-versa.
Our paper is structured in the following manner. Section II presents the specific scientific
problem we are addressing and the challenges it poses. Section III lays out the problem descrip-
tion. Section IV highlights related work and places our work in the context of past efforts in the
fields of Robotics and Artificial Intelligence. Section V describes metrics for sampling quality
that we use to show the impact of using this approach. The core of the paper in Section VI deals
with the overall techniques. Section VII describes the experimental results in simulation using
historical AUV field data as well as at sea. We conclude with Section VIII.
August 23, 2012 DRAFT

5II. KEY CHALLENGES
Intermediate nepheloid layers (INLs) are fluid sheets of suspended particulate matter that
originate from the sea floor [32]. They develop episodically from transport of the turbid bottom
boundary layer [43], [44] and have a potentially significant role in the population connectivity of
benthic species having pelagic larval stages. In doing so, INLs potentially play an important role
in our understanding of the hydrodynamic and biological processes affecting the connectivity
of natural populations. They impact not only our scientific understanding of coastal community
structure, but challenge policy making for coastal ocean management, marine protected areas
and sustainable fisheries regulation [27]. INLs are characterized by high optical backscattering
and low chlorophyll fluorescence.
Predicting when and where key oceanic processes that impact INLs will be encountered is
problematic in dynamic coastal waters where diverse physical, chemical and biological factors
interact in varied and rapidly changing ways. Wind and buoyancy driven forcing, flushing due
to land drainage, bathymetric variations, presence of fronts and large tidal variations together
combine to drive variability in this coastal domain. Pilot surveys and returning to sample dense
feature signals previously observed are usually not viable in such an environment. Additionally,
operational and scientific constraints driven by the need to make the most of stored energy on
AUVs and to obtain coverage in this dynamic environment define the problem domain in which
we are to sample.
Further, with no a priori bio-geochemical model defining these processes, it is often a pre-
requisite in coastal ocean studies to sample water masses efficiently with prompt sample return
for analyses. Ship-based sampling methods with periodic deployments of water samplers require
fewer restrictions on number of samples. However, sampling is less precise, more taxing on the
vessel and crew with repeated stops potentially in adverse weather conditions and is ultimately
August 23, 2012 DRAFT

6not cost-effective in comparison to deployments with robotic platforms.
Sampling with robots such as AUVs comes with its own challenges. In trying to solve a slice
of the adaptive sampling problem for robotic sample acquisition in our problem domain, we
encounter the following difficulties:
• The primary scientific drivers for our surveys are biologists who are interested in con-
structing species abundance and distribution models. Shore side analysis of captured micro-
organisms using molecular probes and sandwich-hybridization assays [45], [17], [16] allows
detection of crustaceans, polychaetes and mollusks. Scientific constraints driven by the need
to understand genetic variability and community structure in these micro-organisms forces
spatial constraints between individual sampling locations. Consequently, returned water
samples which provide sufficient sampling coverage of the targeted volume are desirable.
• With no a priori model of a feature, our primary challenge is to fly ’blind’, detect the
feature of interest (INLs are the focus of this paper) and appropriately trigger our water
samplers. Feature recognition based on unsupervised clustering approaches [12] and Hidden
Markov Models using semi-supervised approaches [21] have shown to be viable. In this
paper our emphasis is on showing how a utility based multi-criteria technique can provide
a more refined use of limited water samplers. Sample acquisition is at local environmental
hot-spots, where a measurement exceeds a pre-defined threshold [33], [25], characterizing
dense feature signals in the upper water column.
• Our sampling approach is constrained operationally; the feature must be sampled in one
volume survey with the primary objective of taking water samples at hot-spots. Battery
limitations together with high temporal variability of the studied feature phenomena prohibits
the robot to perform a pilot survey as in [40], [39] or constrained local exploration [11]
within the confines of a volume. No synoptic views are available a priori.
August 23, 2012 DRAFT

7• Onboard the robot, we have a limited energy source restricting missions to a maximum of
18 hours and with 10 gulper water samplers (Fig. 1), with each sampler to be used once
during the mission to avoid contamination.
To overcome these constraints, we propose an approach to autonomous sample acquisition
based on an on-line calculation of sample utility. A series of reward functions provide a balance
between temporal and spatial scales of oceanographic sampling and we do so in a way that
science preferences or evolving knowledge about the feature of interest can be incorporated in
the decision process.
III. PROBLEM DESCRIPTION
The problem we address is in effectively returning water samples with an AUV, while re-
specting spatial and resource constraints. We are constrained to following a lawn-mower pattern
within a predefined volume since it provides biologists a simple way in which to reconstruct
the transects of the AUV. This provides the basis for understanding how to visualize the spatial
structure of the INL and the context of where the water samples have been acquired. The objective
is to take water samples within local maxima of the feature of interest, usually near hot-spots.
These hot-spots are often patchy with a significant spatial extent horizontally (in kilometers) and
with small vertical scales (in meters) [32]. Fig. 2 shows an example of an INL reconstructed
based on a traditional AUV survey. As noted in Section II, spatial constraints between samples
to be acquired are imposed (e.g ≥ 500m, often with a limit of two samples per transect) to
ensure biological diversity of the specimens collected within the volume sampled.
We call the volumetric distribution of a certain oceanic phenomena a Field of Interest (FOI).
Let Z ′ : R3 → R represent a scalar FOI such that y = Z ′(v), is the value of the FOI at a
geographic location v ∈ R3. In our experiments, the FOI is an INL. We obtain the value of
August 23, 2012 DRAFT

8
Fig. 2: An Intermediate Nepheloid Layer (INL) detected by an AUV mission in the Monterey Bay in August 2005,
showing the location of the AUV transect in the bay (left) and optical backscatter image at the 420 Nm frequency
showing the INLs patchy nature (right). Courtesy: John Ryan/MBARI
Z ′ for the current traversed point by means of a mapping from multivariate measurements, like
optical backscattering and fluorescence, described in our earlier work in [12] and [29]. For a
location vi, we obtain a value Z ′(vi) = yvi in the interval [0, 1] indicative of the strength of the
INL at that point. During a mission, the robot’s goal is to decide autonomously whether to take
a water sample at a location. At the end of the mission a number of samples would have been
taken, represented by the vector:
G ={< v1, yv1 >, ..., < vg, yvg >
}(1)
where vj represents the location where the sample is taken and yvj represents the value for
the FOI at that location. g represents the index of samples and M defines the total number of
available water samplers (10) on the robot, with g ≤M.
We define Q as a post-facto quality metric computed after all samples Gj =< vj, yvj > have
been collected and one that provides us with a qualitative score for the set G taken sequentially
as the robot moves through the water-column.
August 23, 2012 DRAFT

9We consider three sampling strategies driven by available information, that are a combination
of on-line and a priori approaches.
• Weakly Informed strategies use reactive near term values, including current and past values
of the FOI, sampling locations thus far in the mission, the number of samples taken and
mission elapsed time. In other words, they do not rely on spatially or temporally contextual
data available beyond AUV sensor data.
• Mission Aware strategies are more cognizant with additional knowledge such as the total
estimated survey time and, in the case of AUV surveys, survey geometry including the
number of AUV transects and/or the spatial resolution (or width) of the transects.
• Feature Aware strategies can be used when substantial information is available a priori. For
instance, if the volumetric distribution of a FOI is known, it could potentially lead to a
sample acquisition strategy with additional contextual information, such as a synoptic view
which can aid in the sampling decision. Ways in which such information would be available
include past missions data, theoretical or synthetic ocean models of feature distribution,
satellite imagery, data from a recent low (spatial) resolution survey or extrapolated real-
time data from moorings and drifters.
In this paper, we focus on Weakly Informed and Mission Aware strategies and the description
of:
1) a quality metric Q to evaluate the resulting samples G taken by a robot (Eqn. 1). The
metric targets spatial coverage, patchiness and feature intensity; and
2) a framework to integrate the available information, scientific and operational preferences
to decide whether to take a water sample at a given location.
August 23, 2012 DRAFT

10IV. RELATED WORK
Work on sampling design to monitor spatial phenomena spans the fields of Ecology, Earth
Science, Statistics, Diagnosis and Robotics. In Ecology and Earth Science the general aim is
to determine the minimum set of sampling locations to characterize certain phenomenon (e.g
concentration of pollutants or spatial distribution of a biological species). Most of these efforts
either have a priori knowledge of the FOI or can make assumptions about feature strength; our
work however, is driven by discovery of this field as the mission progresses with no quantitative
expectation of the FOI.
In the simplest cases random or geometrical sampling designs are sufficient to specify the
places where samples have to be taken to reconstruct Z ′(v). Usually tools from environmental
or spatial statistics are used to choose the spatial sampling design. The FOI to characterize can
be static or dynamic (characterized by Z ′(v, t)); most literature, such as [20], assumes a static
field.
Sampling strategies can be model-based or model-free. Many assume a spatial model of the
phenomena being observed. Often Z ′ can be modeled as a random process with a joint Gaussian
probability distribution over the measurable locations as in [20], [22], [10]. In other cases,
sampling design is based on descriptive statistics of the field being observed; for example, in
[37], observed variance of the field within gridded regions is used to adapt sampling criteria.
Given the existence of a probabilistic model for Z ′, most efforts derive a priori selection of
sampling points, based for example on the maximization of Shannon Entropy [55], of mutual
information among samples [20], [4] or on spatial patterns [8]. Once selected, samples are used
to improve the model of Z ′. In cases where the parameters of the random variable are not
fully known or have a high degree of uncertainty, refinement of parameter estimation occurs as
samples are taken [18]; past samples are therefore taken into account to decide future sampling
August 23, 2012 DRAFT

11locations. This is often known in the literature as adaptive sampling.
Adaptive Sampling has been widely explored in the robotics literature. Approaches have
targeted applications such as static sensor placement [3], [19], [13], [53] and path-planning
for mobile sampling platforms [4], [52], [26]. Usually the sampling approach is targeted at field
reconstruction, where the goal is to be able to estimate the field at unobserved locations over a
wide area. But it can also be focused on observing hot-spots of Z ′[54], or on following a given
spatial pattern [26], [47]. In [37], model-free approaches were used to guide a cable-guided
robot to sample environmental fields. In [52], a pilot experiment with static nodes provided a
sparse sample of an environmental field, from which a non-parametric spatial model of the field
was computed. The task is then formulated as an orienteering problem and the solution path
results in maximum reduction in reconstruction error with a bound on the energy consumption
of the robot. In [20], given an initial sparse sample of a scalar field, a Gaussian Process model
is computed and a mutual information criterion is used to compute optimal sensor locations. In
[4], the mutual information criteria is used to obtain informative paths for AUVs.
Most related work, as above, focuses on field reconstruction leveraging oceanographic or
statistical models. Using these models, the trajectories of AUVs or gliders can be planned, often
on-line [11], [15], [23], [51], to improve the quality of the estimates. The metric used is the
field reconstruction error for the estimated field. However, many scientific applications require
retrieval of samples from the field for lab analysis. [12] and [29] use an unsupervised clustering
approach for sampling the water column. Learning data are unlabeled and the identification
outcome ignores signal history so that it depends only on the data sensed at an instant. [21]
extends this work to include a temporal component using Hidden Markov Models. In [54] special
characteristics of the feature to be sampled, in this case horizontal distribution of an oceanic
feature, are used to predict close future values for water sample acquisition. While looking at
August 23, 2012 DRAFT

12peak chlorophyll values, thin layer structure decisively drives the sampling methodology which is
distinctly constrained by vertical structure. This is not only unlike the features we discuss in our
work, spatial coverage for them, is tangential to their approach. In [53], Empirical Orthogonal
Function (EOF) analysis is performed on historical data and sensors are placed such that the EOFs
show large magnitudes at sensor locations and cross-product between EOFs is small between
selected locations.
Previous efforts like [23], [24], [48], [39] reduce model uncertainty via assimilation of newly
acquired data into an a priori model. Given the background covariance function learned from
past data, new data obtained from vehicle deployment estimate the field at unobserved locations
using methods similar to Gaussian Process Regression (GPR) and Kriging [28], [38]. As in
Kriging and GPR, the uncertainty estimate of prediction is dependent only on the location and
time and not on the actual field value. Hence a priori design is possible. Additionally in [23],
[24], using an a posteriori error, near optimal glider trajectories are computed. The existence of
a prior and field reconstruction needs, distinctively diverge from the drivers of our efforts.
In the Diagnosis community the placement of sensors has been explored widely as a means
to drive the minimal set of probes for fault detection and isolation [34], [7]. The key idea is to
find a minimum number of probes and yet be able to reasonably identify anomalies in systems,
including networked traffic and electronic chips, being monitored. These probes are used to
discriminate a discrete and finite set of signals quite unlike the continuous and complex fields
in the coastal ocean.
August 23, 2012 DRAFT
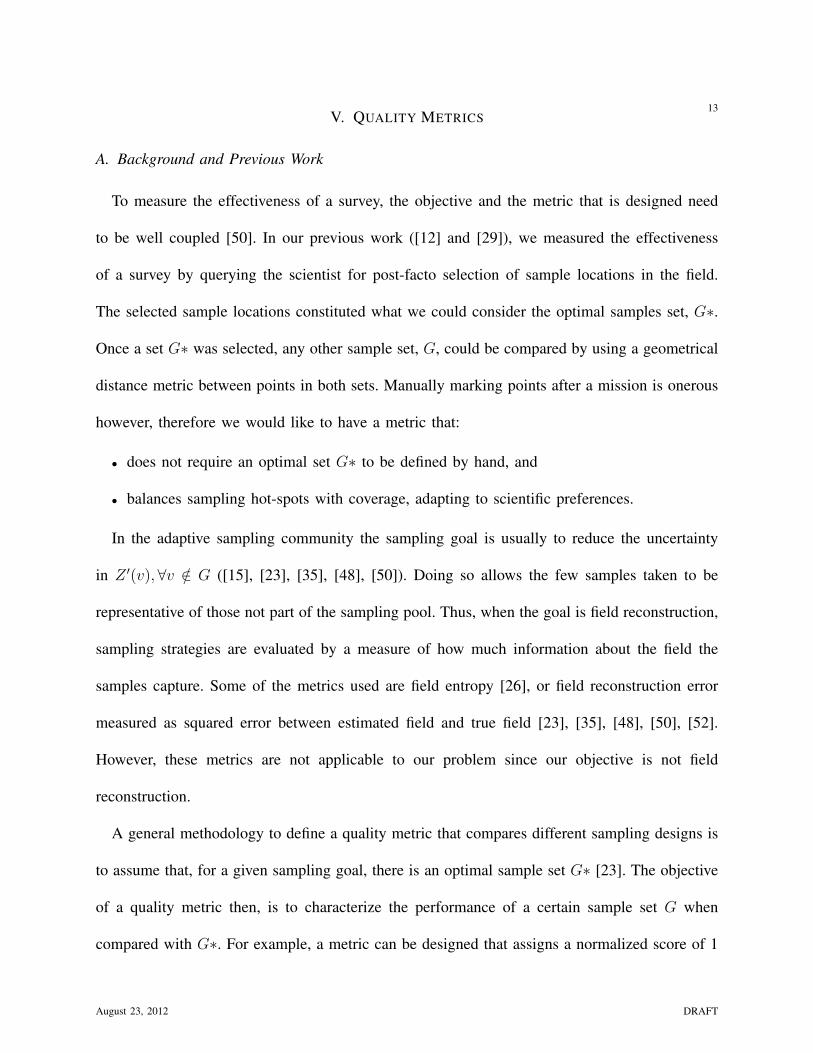
13V. QUALITY METRICS
A. Background and Previous Work
To measure the effectiveness of a survey, the objective and the metric that is designed need
to be well coupled [50]. In our previous work ([12] and [29]), we measured the effectiveness
of a survey by querying the scientist for post-facto selection of sample locations in the field.
The selected sample locations constituted what we could consider the optimal samples set, G∗.
Once a set G∗ was selected, any other sample set, G, could be compared by using a geometrical
distance metric between points in both sets. Manually marking points after a mission is onerous
however, therefore we would like to have a metric that:
• does not require an optimal set G∗ to be defined by hand, and
• balances sampling hot-spots with coverage, adapting to scientific preferences.
In the adaptive sampling community the sampling goal is usually to reduce the uncertainty
in Z ′(v),∀v /∈ G ([15], [23], [35], [48], [50]). Doing so allows the few samples taken to be
representative of those not part of the sampling pool. Thus, when the goal is field reconstruction,
sampling strategies are evaluated by a measure of how much information about the field the
samples capture. Some of the metrics used are field entropy [26], or field reconstruction error
measured as squared error between estimated field and true field [23], [35], [48], [50], [52].
However, these metrics are not applicable to our problem since our objective is not field
reconstruction.
A general methodology to define a quality metric that compares different sampling designs is
to assume that, for a given sampling goal, there is an optimal sample set G∗ [23]. The objective
of a quality metric then, is to characterize the performance of a certain sample set G when
compared with G∗. For example, a metric can be designed that assigns a normalized score of 1
August 23, 2012 DRAFT

14
Easting
Nor
thin
g
597 598 599 600 601
4075
4075.5
4076
4076.5
4077
4077.5
4078
4078.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Fig. 3: An example of an INL. Figure shows a horizontal interpolated slice of the intensity at 55 meters depth of
the INL detected on June 26th, 2008. Dark red regions show high concentration of hot-spots; the color bar shows
the estimated INL intensity in the range [0, 1], of being within an INL, with 0 implying no INL detected. White
circles show samples distributed uniformly in space; squares show an ideal sample set that is aimed at hot-spot
coverage. X and Y axis are easting and northing (in km) respectively.
to the optimum sample set G∗. A certain choice of sampling points will produce a sample set
G with score s ≤ 1. We can now use this score to compare how different sampling strategies
perform. Alternatively a distance measure can be designed to rank any G. The closer to G∗
a certain G is, the better. It is also possible to design a metric that does not need an optimal
solution G∗ to be set a priori. In those approaches, a metric is not calculated as a distance to a
certain optimal solution, but is intrinsic to each solution.
Consider a 2D field depicting a horizontal1 slice of an INL as shown in Fig. 3 from an AUV
survey on June 26th, 2008 (mission 2008-06-26). Suppose that our goal is to retrieve water
1In our experiments at sea, the AUV saw-tooth yo-yo patterns were up to a maximum depth of 200 meters, with a maximum
depth-envelope of 150m. The horizontal scales of sampling were on the order of kilometers. Hence, from a spatial sampling
and coverage perspective, the z component is negligible.
August 23, 2012 DRAFT

15samples from within patches of high intensity signal. A baseline case is where we perform
uniform sampling, i.e., spread over all discrete samples in space resulting in a sample set marked
by circles in the figure. The squares on the other hand, would represent what would ideally rate
as a ”good” sample set given the scientific intent of sampling in hot-spots while maintaining
spatial coverage. The question to be posed then is, what metric would rate the uniform sample
set low, and the selective sample high, given field Z ′ as shown in the figure. If we use a metric
based on finding an optimal sample set, G∗ could be defined as the set of the n points with
higher yvi . This set would be given a metric value of 1 corresponding to dense points around
“good” samples (or squares in the above figure). For any other G the metric value could then
be∑Gi∈G
yvi∑Gj∈G∗
yvj. Alternatively if we do not want to explicitly define the optimal set G*, we could
use as a metric the mean value of yvi ,∀vi ∈ G. Given two sample sets, G1 and G2, G1 would
be better than G2 if the mean value of the FOI for samples in G1 is higher than the mean value
for G2. A similar approach is taken in [54], where the goal is to take samples in fluorescence
hot-spots and the metrics are based on the difference between the actual fluorescence peak level
and the fluorescence level at the trigger point. However, defining G∗ in any such manner could
result in poor spatial coverage with the consequence, that samples would end up being taken in
close proximity. Usually the two goals, sampling hot-spots and maintaining spatial coverage, are
conflicting, especially for oceanographic biological features that are patchy and concentrated.
B. Voronoi Partitions
To take into account spatial sample distribution, we derive a metric from Voronoi partitions
[1]. These take a volume V and a discrete set of points P within this volume, partitioned into
regions, one for each pi ∈ P , such that any point in a region is closer to a point pi than to any
other point pj ∈ P . The set of points is the set of samples G. So the studied field is divided
August 23, 2012 DRAFT

16into regions according to the sampling point Gi closest to each location.
We have designed three different metrics leveraging Voronoi partitions, each focusing on one
aspect of the hot-spot versus coverage trade-off. For each, the closer to a zero value they are for a
given sample set, qualitatively better the set is. The first, cvA, is centered on spatial coverage and
measures how the samples taken cover the survey area (with z abstracted out). A drawback of
this metric is that dense areas can be under-sampled. The second metric, cvΣ, is biased towards
hot-spot rich areas. As a result, partitioning is done in such a way that areas with lower FOI
intensity are larger than dense FOI areas. This could lead to poor spatial coverage, having, for
example, large areas represented by one sample. Consequently, the third metric, cvµ, balances
both. Selection of the metric criteria then depends on mission needs and scientific intent. The
definitions of the three metrics follow:
• cvA: is the coefficient of variation (standard deviation divided by the mean) of the area of
the Voronoi regions. Only the size of the regions is taken into account; a low cvA implies
the Voronoi areas are similar and therefore the degree of spatial coverage of the individual
samples is high.
• cvΣ: accounts for the variations in the accumulated signal value of the feature between
regions. For each Voronoi region∑
Z ′(v) is computed and the coefficient of variation of
the resulting values is calculated. In other words, cvΣ accounts for the similarities of the
accumulated value of Z ′(v) in each region; a low cvΣ therefore indicates that all the Voronoi
regions are qualitatively similar in feature distribution. Regions with high variability in size
can encapsulate the same feature coverage. Ideally, accumulated values would be the same
for all the regions, with the intuition that samples have been taken representing regions that
capture the same signal intensity.
• cvµ: is the coefficient of variation of the mean value of Z ′(v) for each Voronoi region. This
August 23, 2012 DRAFT

17measure balances the two metrics above: like cvΣ it accounts for the values of the feature
within each region, but unlike it, the size of the regions matters. For example, two regions,
one large with low feature strength and one small with high feature strength will yield a
low value for cvΣ, a high value for cvA and an intermediate value for cvµ. If all the regions
were equal in area, cvµ = cvΣ; if all encapsulated the same feature signal, cvµ = cvA.
The best theoretical value for cvA is obtained when all the areas of the Voronoi partitions are
equal, so cvA = 0 and the selected sampling points partition the survey area in equal sub-areas.
The worst case is when all the sub-areas are zero except one, which occupies all the survey. In
that case, the standard deviation is a/√n, where a is the total survey area and n the number of
samples. As the mean area of the Voronoi partitions is always a/n, the worst case value for cvA
is√n. Consequently, the range for cvA is cvA → [0,
√n ]. The same applies for cvΣ; in theory
the worst case is when one of the partitions has all the concentrated FOI while other partitions
have none, so cvΣ → [0,√n ] also. It is not difficult to calculate that cvµ → [0,
√n ]. These
ranges are an upper-bound, depending on the spatial distribution of hot-spots.
Fig. 4 and Fig. 5, graphically show maximum and minimum values for each of the metrics
for the 2008-06-26 and 2009-11-09 AUV missions. In each, in subfigures a), c), e), sampling is
marked at hot-spots maximizing the metric (i.e., lower values), given the hot-spots detected and
the survey geometry. The squares represent where the samples are taken, the triangles represent
all the possible hot-spots for that mission. In subfigures b), d), f), the worst case values for the
metric, and the hot-spots yielding this value are shown. In both figures the Voronoi partitions
resulting from sampling at these hot-spots are also shown. Note that all the six sample sets
shown in each figure address our primary scientific goal: returning water samples from hot-spots
of an FOI, an INL. The difference lies in how obtaining samples at those locations partitions
the survey area, which is our secondary goal.
August 23, 2012 DRAFT

18
596.5 597 597.5 598 598.5 599 599.5 600 600.5 601
4075
4075.5
4076
4076.5
4077
4077.5
4078
4078.5
cvA: 0.01
Nor
thin
g
Easting
(a) Best possible value for cvA
596.5 597 597.5 598 598.5 599 599.5 600 600.5 601
4075
4075.5
4076
4076.5
4077
4077.5
4078
4078.5
cvA: 2
Nor
thin
g
Easting
(b) Worse possible value for cvA
596.5 597 597.5 598 598.5 599 599.5 600 600.5 601
4075
4075.5
4076
4076.5
4077
4077.5
4078
4078.5
cvΣ: 0.0057
Nor
thin
g
Easting
(c) Best possible value for cvΣ
596.5 597 597.5 598 598.5 599 599.5 600 600.5 601
4075
4075.5
4076
4076.5
4077
4077.5
4078
4078.5
cvΣ: 2
Nor
thin
g
Easting
(d) Worse possible value for cvΣ
596.5 597 597.5 598 598.5 599 599.5 600 600.5 601
4075
4075.5
4076
4076.5
4077
4077.5
4078
4078.5
cvµ: 0.068
Nor
thin
g
Easting
(e) Best possible value for cvµ
596.5 597 597.5 598 598.5 599 599.5 600 600.5 601
4075
4075.5
4076
4076.5
4077
4077.5
4078
4078.5
cvµ: 0.86
Nor
thin
g
Easting
(f) Worse possible value for cvµ
Fig. 4: Best and worst case values for each of the three metrics, for an AUV mission on June 26th 2008. On theleft, samples have been taken at hot-spots maximizing the metric; for those hot-spots the metric value is as low(better) as it can be for that mission. The squares represent where the samples are acquired, the triangles representall the other possible hot-spots for that mission. On the right panel, the worst case values for the metric and thehot-spots yielding this value, are shown. The Voronoi partitions resulting from sampling at these hot-spots are alsorepresented. Y and X axis are northing and easting (in km).
Evaluating these metrics on-line effectively is challenging. Not only is computing Voronoi
partitions computationally intensive, but knowledge of all sample location points a priori, is
necessary. As a result, we focus on locally available information in situ, augmented by science-
August 23, 2012 DRAFT

19
592 592.5 593 593.5 594 594.5 595 595.5 596 596.5
4069
4069.5
4070
4070.5
4071
4071.5
4072
4072.5
cvA: 0.069
Nor
thin
g
Easting
(a) Best possible value for cvA
592 592.5 593 593.5 594 594.5 595 595.5 596 596.5
4069
4069.5
4070
4070.5
4071
4071.5
4072
4072.5
cvA: 1.4
Nor
thin
g
Easting
(b) Worse possible value for cvA
592 592.5 593 593.5 594 594.5 595 595.5 596 596.5
4069
4069.5
4070
4070.5
4071
4071.5
4072
4072.5
cvΣ: 0.036
Nor
thin
g
Easting
(c) Best possible value for cvΣ
592 592.5 593 593.5 594 594.5 595 595.5 596 596.5
4069
4069.5
4070
4070.5
4071
4071.5
4072
4072.5
cvΣ: 1.6
Nor
thin
g
Easting
(d) Worse possible value for cvΣ
592 592.5 593 593.5 594 594.5 595 595.5 596 596.5
4069
4069.5
4070
4070.5
4071
4071.5
4072
4072.5
cvµ: 0.12
Nor
thin
g
Easting
(e) Best possible value for cvµ
592 592.5 593 593.5 594 594.5 595 595.5 596 596.5
4069
4069.5
4070
4070.5
4071
4071.5
4072
4072.5
cvµ: 0.45
Nor
thin
g
Easting
(f) Worse possible value for cvµ
Fig. 5: Best and worst case values for each of the three metrics, for an AUV mission on November 9th, 2009.On the left, samples have been taken at hot-spots maximizing the metric; for those hot-spots the metric valueis as low (better) as it can be for that mission. The squares represent where samples are acquired, the trianglesrepresent all the other possible hot-spots for that mission. On the right, the worst case values for the metric, andthe hot-spots yielding this value, are shown. The Voronoi partitions resulting from sampling at these hot-spots arealso represented. Y and X axis are northing and easting (in km).
driven intent and FOI estimates to drive our sampling. In Section VII, we compare the above
metrics.
August 23, 2012 DRAFT
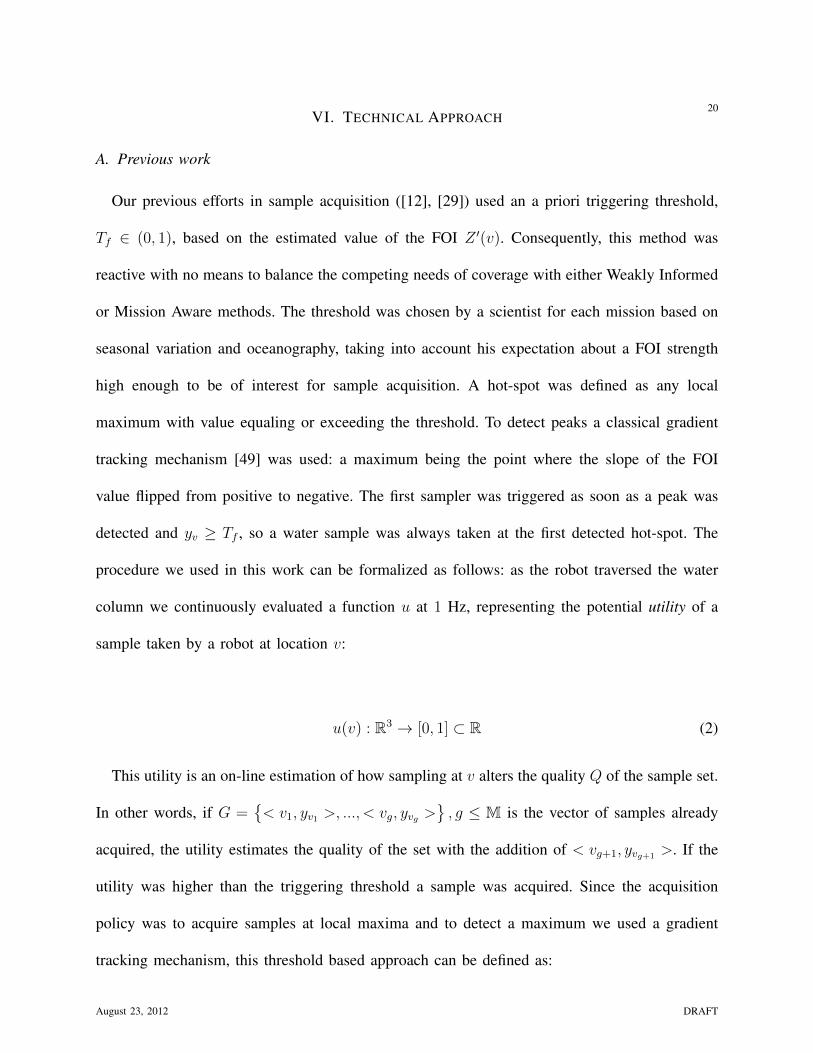
20VI. TECHNICAL APPROACH
A. Previous work
Our previous efforts in sample acquisition ([12], [29]) used an a priori triggering threshold,
Tf ∈ (0, 1), based on the estimated value of the FOI Z ′(v). Consequently, this method was
reactive with no means to balance the competing needs of coverage with either Weakly Informed
or Mission Aware methods. The threshold was chosen by a scientist for each mission based on
seasonal variation and oceanography, taking into account his expectation about a FOI strength
high enough to be of interest for sample acquisition. A hot-spot was defined as any local
maximum with value equaling or exceeding the threshold. To detect peaks a classical gradient
tracking mechanism [49] was used: a maximum being the point where the slope of the FOI
value flipped from positive to negative. The first sampler was triggered as soon as a peak was
detected and yv ≥ Tf , so a water sample was always taken at the first detected hot-spot. The
procedure we used in this work can be formalized as follows: as the robot traversed the water
column we continuously evaluated a function u at 1 Hz, representing the potential utility of a
sample taken by a robot at location v:
u(v) : R3 → [0, 1] ⊂ R (2)
This utility is an on-line estimation of how sampling at v alters the quality Q of the sample set.
In other words, if G ={< v1, yv1 >, ..., < vg, yvg >
}, g ≤ M is the vector of samples already
acquired, the utility estimates the quality of the set with the addition of < vg+1, yvg+1 >. If the
utility was higher than the triggering threshold a sample was acquired. Since the acquisition
policy was to acquire samples at local maxima and to detect a maximum we used a gradient
tracking mechanism, this threshold based approach can be defined as:
August 23, 2012 DRAFT

21
F = {uv ≥ Tf ∧ uv < uv−1} (3)
where F depicts whether a sample should be acquired, Tf ∈ (0, 1) is the trigger threshold and
uv−1 is the utility at the previous location. Science needs also dictated a minimum separation
distance between samples, dmin; so given a possible sample location v and the set of previous
samples acquired G, the utility was given by:
u(v,G) =
0 ∃ i ∈ {1..g} : dist(v, vi) ≤ dmin
yv otherwise
(4)
where g is the number of samples already acquired, vi is the location of the sample Gi =<
vi, yvi >, and dist(v, vi) is the Euclidean distance between locations v and vi.
This approach has the following drawbacks:
• The sampling policy is myopic [18]. For patchy fields where hot-spots are distributed
spatially, the policy results in greedy sample acquisition as long as the minimum separation
constraint dmin is satisfied. This can potentially result in all samples being acquired early
in a mission.
• The spatial constraint dmin is a hard constraint. Not only is it enforced irrespective of signal
strength, it is also challenging to find a “good” value in the first place. What is desirable
instead is the expression of scientific “intent” such that the constraint can be relaxed in cases
where potential samples with high information gain can be closer than a dmin specified for
the mission.
• Finally, such a policy is also constrained by the threshold Tf chosen a priori. This is a
significant drawback in situations where acquiring a sample with low utility is considerably
August 23, 2012 DRAFT

22better than no acquisition. And this is especially true if towards the end of a mission samplers
are still available.
To address these drawbacks we show a general framework with the goal of integrating science
preferences with information about the FOI to calculate utility during the course of a mission.
By doing so we add contextual information to the policy presented in [12] and [29]. Sample
utility is now a function of time and space, in addition to being dependent on the signal strength.
B. Utility Calculation in Sequential Sampling
Generalizing our previous work we define a sampling utility function u as:
u : R3 → [0, 1] ⊂ R = fgoal × f2 × ...fn (5)
where, fi is a reward function representing a specific constraint or ’behavior’ that should affect
the total sample utility while targeting desired properties of the sampling policy. fgoal represents
the key science goal of acquiring samples at hot-spots; for our application fgoal(v) = yv.
Using this framework, new parameters or ’behaviors’ can be included in the utility calculation,
making it configurable and adaptable to changing scientific goals. The multiplicative utility has
the effect of allowing any of the objective functions to act as hard constraints. Additionally,
since each reward function addresses a different property or requirement for the overall sampling
task, they can be decoupled and modeled in isolation one from another allowing for a flexible
experiment design.
We focus on Weakly Informed and Mission Aware strategies where u is only known for
present and past locations, using:
• Weakly Informed rewards
– distance to previous samples (fdist)
August 23, 2012 DRAFT

23– number of samplers used (fsamplers)
• Mission Aware rewards
– remaining time and number of remaining transects in a volume survey (fratio)
Scientists can decide whether to include a reward function when the corresponding behavior
is desired in the sampling strategy. In our current implementation utility is defined as:
u(v,G, t) = yv × fdist × fsamplers × fratio (6)
A suitable function profile encapsulating science preferences has to be designed for each
of the reward functions above. Each reward function has a series of parameters in order to
fine tune the desired behavior. For example, fdist is the reward function bringing in spatial
constraints between samples into the utility calculation. Its parameters allow these constraints to
be more relaxed or strict depending on science needs. To ease the scientist’s effort, a series of
predefined, ready to use, function profiles have been generated. These profiles are combinations
of function parameters that encapsulate typical cases the scientist would be interested in, with
new profiles synthesized as needed. Fig. 6 shows the six predefined profiles implemented for
fdist → [0, 1] ⊂ R. This reward function modifies the utility taking into account the distance
to the nearest previous sample. If this distance is more than a certain dmin, the utility is not
modified (i.e the reward is equal to 1). If it is lower, a reward ∈ [0, 1) is returned. Doing so,
it dynamically reduces the utility of taking a water sample at a location when it is closer than
dmin to any previous sample.
Formally, fdist evaluated at location v is:
August 23, 2012 DRAFT
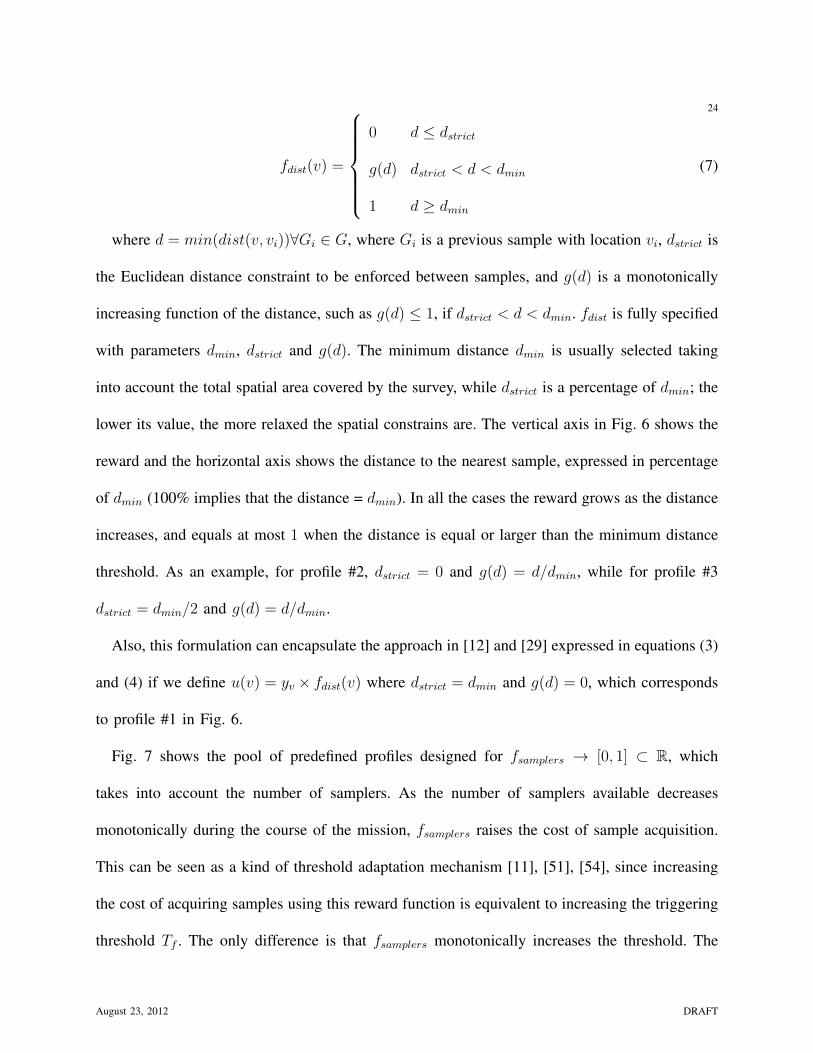
24
fdist(v) =
0 d ≤ dstrict
g(d) dstrict < d < dmin
1 d ≥ dmin
(7)
where d = min(dist(v, vi))∀Gi ∈ G, where Gi is a previous sample with location vi, dstrict is
the Euclidean distance constraint to be enforced between samples, and g(d) is a monotonically
increasing function of the distance, such as g(d) ≤ 1, if dstrict < d < dmin. fdist is fully specified
with parameters dmin, dstrict and g(d). The minimum distance dmin is usually selected taking
into account the total spatial area covered by the survey, while dstrict is a percentage of dmin; the
lower its value, the more relaxed the spatial constrains are. The vertical axis in Fig. 6 shows the
reward and the horizontal axis shows the distance to the nearest sample, expressed in percentage
of dmin (100% implies that the distance = dmin). In all the cases the reward grows as the distance
increases, and equals at most 1 when the distance is equal or larger than the minimum distance
threshold. As an example, for profile #2, dstrict = 0 and g(d) = d/dmin, while for profile #3
dstrict = dmin/2 and g(d) = d/dmin.
Also, this formulation can encapsulate the approach in [12] and [29] expressed in equations (3)
and (4) if we define u(v) = yv × fdist(v) where dstrict = dmin and g(d) = 0, which corresponds
to profile #1 in Fig. 6.
Fig. 7 shows the pool of predefined profiles designed for fsamplers → [0, 1] ⊂ R, which
takes into account the number of samplers. As the number of samplers available decreases
monotonically during the course of the mission, fsamplers raises the cost of sample acquisition.
This can be seen as a kind of threshold adaptation mechanism [11], [51], [54], since increasing
the cost of acquiring samples using this reward function is equivalent to increasing the triggering
threshold Tf . The only difference is that fsamplers monotonically increases the threshold. The
August 23, 2012 DRAFT

25formal specification of this function is:
fsamplers(g) =
1 g < gmin
1− k × g/M g ≥ gmin
(8)
with g being the number of samples already acquired, M the total number of onboard samplers,
gmin the number of samples taken before the threshold is increased, and k ∈ (0, 1] the rate of
change of the increase. Higher the k, the more the threshold is increased from one sample to
the next. For example in Fig. 7, for profile #7 gmin = 1 and k = 0.2, while for profile #10
gmin = M/2 and k = 0.2.
Mission Aware utility functions integrate knowledge about the specific mission. In the context
of AUVs, remaining time and number of pending transects are taken into account to define a
reward function, fratio. Usually both parameters are balanced, allowing a mission to be completed
in the available time. Coastal conditions, especially currents, can make AUV speed and routing
unpredictable. In addition, the onboard planning module adapts the sampling area resolution
dynamically, increasing it in areas with high FOI signature and vice-versa in areas of low
signature [30]. With the onset of mission end, fratio has the effect of increasing the utility
of sample acquisition and is complementary to fsamplers; the first ensures balance in acquiring
too many samples early in the mission, while the latter reduces the threshold of the signal
strength required towards mission end for acquisition. Formally:
fratio(Q,R) =
R/Q R > Q ∧R ≥ at ∧Q > 0
1 otherwise
(9)
where Q = g/M, R = max(ti/ttotal, d/e), ttotal is the maximum mission time, ti the current
time, d the distance already traveled, e the total estimated distance to be traveled, g the number
of samplers used and M the total number of samplers. at is the activation threshold and is the
August 23, 2012 DRAFT

26
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
% of dmin
rew
ard
(a) Profile #1
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
% of dmin
rew
ard
(b) Profile #2
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
% of dmin
rew
ard
(c) Profile #3
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
% of dmin
rew
ard
(d) Profile #4
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
% of dmin
rew
ard
(e) Profile #5
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
% of dmin
rew
ard
(f) Profile #6
Fig. 6: Implemented ready-to-use function profiles
for fdist. The vertical axis is the reward. The hori-
zontal axis is the ratio (expressed as a percentage)
between the distance to the nearest previous sample
and dmin.
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
# of used gulpers
rew
ard
(a) Profile #7
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
# of used gulpers
rew
ard
(b) Profile #8
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
# of used gulpers
rew
ard
(c) Profile #9
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
# of used gulpers
rew
ard
(d) Profile #10
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
# of used gulpers
rew
ard
(e) Profile #11
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
# of used gulpers
rew
ard
(f) Profile #12
Fig. 7: Implemented ready-to-use function profiles
for fsamplers. The vertical axis is the reward. The
horizontal axis represents the number of water sam-
ples already acquired. The total number of samplers
is ten.
only parameter of this function; fratio is not activated until at is reached. For example, in our
current implementation fratio is 1 until at least 40% of the mission is covered (at = 0.4) and
the first sample has been acquired (Q > 0). R balances competing terminating conditions due to
August 23, 2012 DRAFT

27distance covered or time expended. The percentage of mission completed, in terms of time and
distance, is calculated and compared to the percentage of samplers used thus far. If the former
is larger it increases acquisition likelihood by increasing utility. The aim of this reward function
is to force all the samplers to be activated by the end of the mission even if the FOI intensity
is low. Both fdist and fsamplers quantitatively reduce utility, as their range is [0, 1]. In contrast,
fratio → [1, 10)2(when using fratio results in u > 1, u is truncated to 1) making the overall
utility more permissive as we get closer to mission end.
The rationale for how these functions were designed is based on a mix of our knowledge of
FOIs and operational and scientific constraints in our domain of operating the AUV. However the
methodology of their use is general (in Section VIII we cover a number of ways to synthesize
these functions, some automatically to overcome some limitations). fdist originated from the
need to relax the hard distance constraints in [29] (Eqn 4). fsamplers resulted from the need to
conserve samplers: the more samples one had acquired during the course of the mission, the
larger the FOI value of Z ′ was needed to acquire the next set of samples. This could lead to
some samplers not being used and is compensated by fratio, which modifies the utility so lower
values of Z ′ are appropriate when closer to mission end. Both fratio and fsamplers play the role
of threshold adaptation, the former decreases it at the end of the mission while the later increases
it each time a sample is taken. They could be combined in a single function, similar to that of
[54], but we have opted to decouple them, allowing a scientist to make the selection.
An Illustrative Example: Suppose we want to adapt the threshold so each time
a sample is taken, the threshold is increased. For such a case the utility would be
u(v,G) = yv × fsamplers, to take into account the remaining samplers. One can use
2To calculate the range of fratio the maximum value of R/Q has to be calculated. Note that R → [0, 1) and the minimum
value of Q is 1/M, when only one sample has been taken. In our case M = 10, so the range of the function is [1, 10).
August 23, 2012 DRAFT

28profile #7 from Fig. 7 to evaluate on-line a discrete function of the form f(g) = 1−0.2×
g/M, where M = 10 and g is the number of samples previously acquired. This ensures
that towards the end of the mission, Z ′ has to be substantially over the trigger threshold
Tf for sample acquisition. For instance, if Tf is set to 0.5 and for the current location
the FOI yv is 0.51, then for the first sampler to be triggered fsamplers(0) = 1 and
u = 0.51. Subsequently in the mission, if yv continues to be 0.51, with only 9 samplers
remaining, fsamplers(1) = 0.98 and u = 0.4998 with no samples being acquired. To
trigger a second sampler, a stronger signal with yv > 0.50/0.98 = 0.5102 will need
to be observed. Therefore, for the 10th sampler to be triggered, fsamplers(9) = 0.82 so
yv > 0.50/0.82 = 0.61. One challenge of using this reward function is in determining
the choice of k; a high k will make it difficult to acquire samples late in the mission,
while a low value will have almost no impact.
C. Discussion
Given lack of a priori information about the FOI, the use of reward functions allows incor-
poration of user preferences (as in the case of fdist) or available knowledge about the mission,
for sample acquisition. The knowledge can be gathered on-line (as in fsamplers), a priori, or as
a mixture of both (as in fratio). In our case, survey geometry and total mission time, already
embedded in fratio are the only pieces of information available prior to an AUV mission.
The primary advantage of our approach is that it can be easily adapted to available knowledge
or a scientist’s preferences. Further, it allows activating or deactivating specific rewards according
to the mission at hand. If in the example above, the scientist would also like to enforce spatial
constraints or to decrease the threshold toward the end, it can be implemented by activating
fdist and fratio respectively. Or if a model of the feature were available, a reward function
August 23, 2012 DRAFT

29encapsulating this model could be added.
We face two primary challenges in our approach: the a priori definition of the triggering
threshold for hot-spot detection and the function profile selection. Variance in the threshold
value will result in premature use or empty sampler return. However, we overcome this potential
short-coming by using the threshold adaptation mechanisms implemented by fsamplers and fratio.
And to understand this variation and its impact, we undertake threshold sensitivity analysis in
Section VII-B. To aid the selection of reward functions, in Section VII we compare performance
of different parameterizations with the metrics defined in Section V, in addition to comparing
with our previous work in [12] and [29]. We also show whether different parameterizations for
the same function behave differently and which parameters are better suited for a given mission
or family of missions.
VII. EXPERIMENTAL RESULTS
Using previous AUV data from missions in the Monterey Bay, we provide a comparison
between samples taken by means of a nominal non-utility based approach, and those taken
using utilities computed out of a set of reward functions. And we show the results of applying
our methodology [44] in a single field trial onboard MBARI’s Dorado AUV, carried out in July
2010 and applied to the science goal of sampling INLs.
Table I is a qualitative synopsis of missions used for this analysis. All but July 2010 (2010-07-
01) are based on the approach shown in [12] and [29]. The table includes the triggering threshold
selected by an oceanographer, the number of hot-spots found given that threshold, the number
of water samples taken, the duration of the mission, the absolute distance constraint imposed
between samples, as well as a brief description of the FOI and the spatial distribution of the
samples. For each mission, the threshold was chosen by a scientist according to expectations
August 23, 2012 DRAFT

30about FOI strength based on prior experience. A sensitivity analysis on the impact of this
threshold in the number of hot-spots is presented in Section VII-B. In all missions except that
of July 2010, each sample involved the triggering of two samplers simultaneously to satisfy
the need for the sample volume required for lab analysis. Hence, for these missions, 5 samples
depict triggering of all 10 samplers onboard the AUV.
Our historical data analysis involves simulating the AUV using past runs and following the
same mission structure deterministically with identical sensor inputs for the FOI. Instead of
triggering sample acquisition using the technique in [29], we use reward functions. Since there
are 6 different predefined distance profiles, 7 sampler profiles and an on/off for fratio, a total of
84 different sampling profiles, including the nominal approach, were generated for each mission.
These 84 profiles are compared in terms of the three defined metrics cvA, cvΣ and cvµ.
A. Analysis of results
Table II shows the quality metrics for each non-utility based approach cited in [29]. For
comparative analysis, experiments were run with a set of parameters highlighting a set of
predefined reward function profiles for the same data set. For each metric, the best values are
highlighted in bold. Lower cvΣ, cvA and cvµ (Section V) imply the sampling policy is capturing
both hotspotedness [26] and spatial coverage of the FOI Z ′. In some missions (e.g 2009-11-04),
a combination of reward function profiles exists which gives better values than the non-utility
version for all three metrics.
From the above experiments and as shown in Table II, we determined empirically that for
fdist profiles #2 and #3 generated almost identical results. Also performance of profiles #1 and
#5 is almost equal, and the same applies for #4 and #6. This is true for all 10 missions for
profiles #2 and #3, for 8 out of 10 for profiles #1 and #5, and for 9 out of 10 for #4 and
August 23, 2012 DRAFT

31Mission Trigger # of # of Mission Distance FOI Description Sample
threshold hot-spots samples Duration constraint Distribution2008-05-12 0.52 26 5/5 5h 19min 1000 m feature intensive, many peaks
above threshold
within 2/3
of mission2008-06-26 0.52 54 5/5 4h 35min 1000 m feature intensive, two high
peaks along with others slightly
above the threshold
within 1/2
of mission
2008-11-10 0.45 39 5/5 6h 40min 700 m feature intensive, concentrated
within first 2/3 of mission
within 1/3
of mission2009-11-04 0.45 6 2/5 7h 00min 1000 m poor INL, concentrated within
first 1/5 of mission
within 1/7
of the mis-
sion2009-11-09 0.45 14 5/5 5h 17min 1000 m feature intensive, several peaks
slightly above threshold and
homogeneously distributed
homogeneous
2009-11-10 0.45 13 3/5 1h 57min 1000 m feature intensive, several peaks
slightly above threshold and
homogeneously distributed
homogeneous
2009-11-13 0.68 13 5/5 7h 11min 1000 m feature intensive, one peak at
the beginning, most peaks at
the end, small peaks in the mid-
dle
homogeneous
2009-12-08 0.45 12 3/5 2h 36min 1000 m poor, peaks slightly above the
threshold within first 1/2
within 1/2
of mission2010-03-23 0.45 3 2/5 6h 43min 1000 m poor, only one peak at the
beginning with another toward
the end
at the be-
ginning and
the end2010-07-01 0.21 1 2/10 6h 02min 2500 m poor, none to weak feature sig-
nal except for two peaks to-
wards the end
—
TABLE I: Sampling parameters and qualitative description of AUV missions in the Monterey Bay. Sample
distribution is based on using [12] and [29], except for 2010-07-01, where the utility based approach was used.
#6. Profile #2 when used in near proximity with a previously sampled location generates an
absolute utility which is not substantially different had #3 being used, irrespective of signal
strength. Similarly for #1; unless the threshold is equal or lower than 0.5, it resolves identically
to #5 again irrespective of signal strength. As most of the missions have a threshold of at least
0.45, #5 resolves identically to #1 except for peaks where Z ′(v) > 0.9 which appear rarely in
our experiments. The conclusion then, has been to merge some of these profiles keeping only
#1, #2 and #4 and thus reducing the burden of choice for the scientist before planning a mission.
August 23, 2012 DRAFT

32Mission Criterion samples fdist fsamplers fratio cvΣ cvA cvµ
2008-05-12
historical data 5 – – – 0.73 0.50 0.43cvΣ 5 2,3,4,6 8 on/off 0.38 0.54 0.31cvA 5 1,4,5,6 none on/off 0.73 0.50 0.43cvµ 5 1,5 8 on/off 0.61 0.54 0.27
2008-06-26
historical data 5 – – – 0.59 0.70 0.47cvΣ 5 1,5 7 on/off 0.50 0.89 0.52cvA 5 1,5 none on/off 0.59 0.70 0.47cvµ 5 1,5 8 on/off 0.54 0.91 0.41
2008-11-10
historical data 5 – – – 0.93 0.97 0.30cvΣ 5 2,3 none on/off 0.91 0.85 0.41cvA 5 2,3 none on/off 0.91 0.85 0.41cvµ 5 1,4,5,6 none on/off 0.93 0.97 0.30
2009-11-04historical data 2 – – – 1.78 2.03 1.49all 3 2,3 none,10,11,12 on/off 1.62 1.90 1.05
2009-11-09historical data 5 – – – 0.45 0.59 0.23all 5 1,5 8 on 0.37 0.19 0.19
2009-11-10historical data 3 – – – 0.94 1.04 0.92all 4 2,3,4,6 none,10,11 on 0.72 0.76 0.64
2009-11-13
historical data 5 – – – 0.48 0.37 0.49cvΣ 5 4,6 8,11 on 0.20 0.27 0.60cvA 5 1,5 8,11 on 0.20 0.24 0.54cvµ 5 2,3,4,6 8 off 0.49 0.45 0.35
2009-12-08
historical data 3 – – – 1.04 0.98 0.94cvΣ 4 1 none on 0.64 0.66 0.59cvA 4 1 none on 0.64 0.66 0.59cvµ 4 2,3,4,6 none on/off 0.75 0.67 0.57
2010-03-23historical data 2 – – – 1.38 1.45 1.37all 4 1,2,3,4,5,6 none on 0.58 0.65 0.56
2010-07-01 all 2 2,3,4,5,6 any on 2.52 2.73 2.11
TABLE II: Comparative values of quality metrics for non-utility and utility based approaches for AUV missions
in the Monterey Bay, CA. For each mission, the first row shows the values of the nominal, non utility based
approach. The next rows show the best possible values for each metric using reward functions and which functions
combination produces it. Best values for each metric and mission are highlighted in bold.
For fsamplers, #9 does not appear in experiments in Table II. Our intuition is that it is too
aggressive, requiring a strong signal to take the last sample (it multiplies the value of yv by 0.5).
A less aggressive equivalent, #12, appears in one result in the table; this appears only because
it starts reducing the utility after at least half of the samplers have been used; thus its value is
always 1 in this mission, as less than half of the samplers were used. So except for missions
with a very low threshold, our results do not support the use of those two profiles for fsamplers
August 23, 2012 DRAFT

33and therefore have been removed from the list of predefined parameterizations.
From all the missions in Table I, we consider two with different FOI characteristics to highlight
our approach. Fig. 8 shows the samples taken during mission 2008-06-26 using the predefined
reward functions fdist #1 and fsamplers #8 from Fig. 6 and Fig. 7. It also depicts the total utility
based on function choices and FOI values. As shown in the figure, the AUV encountered a feature
intensive FOI, with a total of 54 hot-spots, leading to the use of almost all samplers early within
the first 30% of the mission. This however resulted in missing a more promising sampling location
(with feature signature in excess of 0.9) towards the middle of the mission. Analysis with utility
function combinations shows no choice of functions could obtain quantitatively better values than
the mission as sampled originally for all the three metrics (cvΣ, cvA and cvµ) simultaneously;
24 reward function profiles combinations improve cvΣ and 12 cvµ. None improves cvA but four
combinations improve the other two metrics. In this context, the use of fratio has no impact.
Fig. 9 shows utilities based on fdist #1 and fsamplers #8 for mission 2009-11-09, where all
the samplers were utilized. The feature was homogeneously distributed, with 14 hot-spots that
were only slightly above the triggering threshold. Therefore, the use in isolation of any fsamplers
reward function results in less than 5 samples taken. But if we use fsamplers in combination
with fratio we are able to take 5 samples in hot-spots where all the metrics largely improve the
non-utility original mission ones.
Table II shows absolute values for various metrics. However, these provide only a facet of
how well a certain combination of reward functions perform for a given mission. First, as noted
in Section V, the [min,max] range of a metric depends on the actual spatial distribution of
hot-spots within the field. Second, metric values within the [min,max] interval are not equally
distributed as shown in Fig. 10 and also depend on the spatial spread of hot-spots.
Some measure of an a posteriori comparison gives us an idea of how well our metrics behave.
August 23, 2012 DRAFT

34
Start
End
Fig. 8: A consolidated plot of INL value, threshold, and normalized utility values using fdist = #1 and fsamplers =
#8 for the experiment on 2008-06-26. Dots represent where samples were taken in the non-utility based historical
mission. Squares show where samples would have been taken using reward functions. The value of the reward
functions is also shown. Value for fratio is not shown as it is always one for this mission. Distance to closest
sample is expressed in km. The inset shows the transect and where the samples were taken.
Let H be the set of all the hot-spots found in a given mission, M the number of samplers and
C the set containing all the combinations of M elements of H . C represents all the possible
sample sets. Let Ci ∈ C be a member of C and cv(Ci) the value of one of the metrics for the
sample set Ci. Similarly, if G ∈ C is the set of M samples taken using a certain reward function
selection, cv(G) will be its metric value. One way to assess how cv(G) performs as against any
other cv(Ci) is by the use of a percentile analysis for cv values. This tells us how many Ci have
worse metric value than G.
As an example, Fig. 10 represents all possible values for cvΣ associated with all combinations
of samples that can be formed with the 54 hot-spots found in mission 2008-06-26. Similarly,
Fig. 11 shows all cvA values for the 14 hot-spots detected in mission 2009-11-09. Vertical lines
show where the non-utility and reward function values lie. In both figures, the distribution is
August 23, 2012 DRAFT

35
Start
End
Fig. 9: A consolidated plot of INL value, threshold, and normalized utility values using fdist = #1 and fsamplers =
#8 for the experiment on 2009-11-09. Dots represent where samples were taken in the non-utility based historical
mission. Squares show where samples would have been taken using reward functions. The value of the reward
functions is also shown. Distance to closest sample is expressed in km. The inset shows the transect and where the
samples were taken.
biased towards a qualitatively better metric to the left of the lines.
Table III shows the percentile (the larger the better) for both the nominal and the utility based
approach for all the three metrics. For example, the value of 13 for cvΣ for the original non-
utility based approach in mission 2008-05-12 implies that cvΣ(G) is better than only 13% of the
possible cv(Ci) values, where G is the set of samples taken by the nominal, non-utility based,
approach. Conversely, the utility based approach yields better values for cvΣ(G) than 71% of all
possible sample sets.
As the table shows, in many cases the reward functions exceed the nominal approach per-
formance and also get good percentile values. No values are given for the last two missions as
there were less than 5 hot-spots in the field. In 4 missions the results of both approaches are
unsatisfactory. In 3 missions not all the samplers were triggered, even if there were more than
August 23, 2012 DRAFT

36
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
2000
4000
6000
8000
10000
12000
← previous work
← reward functions
num
ber
of v
alue
s
cvΣ
Fig. 10: A histogram showing the distribution of cvΣ values for all the possible five-sample sets in mission 2008-06-
26. To build the histogram, 1,000 equally spaced categories have been created in the interval (min(cvΣ),max(cvΣ)),
represented by X axis. Y axis shows the number of sample sets in each category. Vertical lines represent where
the original non-utility and the utility based approaches lie. The more the area of the figure on the right of these
lines, the more sample sets have worse cvΣ value than the set resulting from our previous work or the utility based
approach, respectively.
5 hot-spots. Two of these missions were cut short due to technical problems with the AUV and
since a premature end cannot be predicted by fratio it is not able to reduce the threshold to
exhaust all the samplers. In the case of 2009-11-04, the FOI was poor and concentrated within
the first 1/5th of the field. A maximum of three samples can be taken in this volume given spatial
constraints. Note however, no INL was found in the remaining 4/5th of the mission, so despite
the reward functions used, the AUV returned with 2 unused samplers. In the case of mission
2008-11-10, there was a high number of hot-spots, but their magnitude was only slightly above
August 23, 2012 DRAFT

37
0 0.2 0.4 0.6 0.8 1 1.2 1.40
2
4
6
8
10
12
14
16
18
20
← previous work← reward functions
num
ber
of v
alue
s
cvA
Fig. 11: A histogram showing the distribution of cvA values for all the possible five-sample sets for mission
2009-11-09. Naively, the total number of elements is 2,002. To build the histogram, 1,000 equally spaced categories
have been created in the interval (min(cvA),max(cvA)), represented by X axis. Y axis shows the number of
sample sets in each category. Vertical lines represent where the original non-utility and the utility based approaches
lie. The more the area of the figure on the right of these lines, the more sample sets have worse cvA value than
the set resulting from our previous work or the utility based approach, respectively.
the threshold. Most of them were also concentrated in the first half of the mission. In this case,
using any fsamplers results in some samplers not being utilized, which cannot be compensated by
fratio as it only actuates after almost half of the mission. Conversely, not using fsamplers results
in all samplers being utilized. An earlier activation of fratio would be a possible solution for this
kind of missions.
Table IV further summarizes results obtained from Table II, indicating the number of times
August 23, 2012 DRAFT

38# of # of Percentile
Mission hot- sample Metric Previous Rewardspots sets Approach Function
2008-05-12 26 65,780cvΣ 13 71cvA 68 68cvµ 25 82
2008-06-26 54 3,162,510cvΣ 42 59cvA 43 43cvµ 26 52
2008-11-10 39 575,757cvΣ 6 7cvA 12 23cvµ 19 19
2009-11-04 6 6cvΣ 0 0cvA 0 0cvµ 0 0
2009-11-09 14 2,002cvΣ 50 68cvA 27 95cvµ 48 81
2009-11-10 13 1,287cvΣ 1 10cvA 1 14cvµ 0 1
2009-11-13 13 1,287cvΣ 75 99cvA 95 99cvµ 41 84
2009-12-08 12 792cvΣ 2 29cvA 5 28cvµ 0 1
2010-03-23 3 1cvΣ – –cvA – –cvµ – –
2010-07-011
1cvΣ – –cvA – –cvµ – –
TABLE III: Previous work [12], [29] and best reward function percentiles for each of the three metrics with
respect to all the possible sample sets. Values for the two last missions are omitted as they have less than 5 hot-spots.
using a given profile results in the best value of the metric. While the data sets are not statistically
expansive, we do have some preliminary lessons learned from these experiments. As the table
shows, #2 gives the best results overall for two of the three metrics; therefore if no Feature
Aware strategies are implemented it should be the default choice. Performance for #4 is quite
close to that of #2, so it is also a good choice. #4 is slightly more restrictive than #2, so it should
be used when there is a strong indication of dispersed hot-spots. In addition, #4, prevents taking
samples unless at least half of the imposed distance constraint is met, so it is especially useful
August 23, 2012 DRAFT

39fdistance fsamplers
Metric #1 #2 #4 #7 #8 #10 #11 nonecvΣ 4 6 5 1 3 2 3 4cvA 6 5 4 0 2 2 3 7cvµ 5 6 6 0 4 2 2 5
TABLE IV: Summary of Table II indicating the number of times using a utility function profile results in the
best combination also highlighted in bold in that table.
when the field is rich and hot-spots are quite close to one another. #1 performs better than #2
when spatial coverage (cvA) is a factor, but for the remainder two metrics their use does not
yield appreciably better results. Therefore #1 is relevant when spatial coverage is to be factored.
In the case of sampler functions, not using any appears appropriate. This is specially true in
missions with low feature signal or with high triggering threshold. In feature rich situations, #8
performs quite well.
Except for cvµ in 2009-11-13, using fratio gives better or equivalent results for all the metrics
than not using it. In that mission, except for a peak at the beginning, the feature is concentrated
towards the end of the mission. Use of fratio produces a sample to be taken in a small peak in
the middle of the mission, wasting one sampler that could have been more useful towards the
end. Therefore unless the feature is expected to be concentrated at the end and spatial coverage
is not the primary concern, use of fratio is recommended.
In addition to testing our utility based approach on past missions, we ran an at-sea experiment
on July 1st, 2010. A low FOI was expected, so the triggering threshold was set at 0.21. To avoid
exhausting samples early in the mission, the spatial sampling constraint was set for a distance
of 2.5 km and fdist was set to #4, to ensure that at least half of this distance constraint would be
enforced between two samples. Further, to acquire some samples at the beginning of the mission
to counteract the expected weak FOI, fsamplers #10 was chosen. The aim was not to increase
August 23, 2012 DRAFT

40the threshold until at least half of the samples were taken. At sea, not only was the FOI low
with 99% of the time under a threshold of 0.1, post-mission analysis indicated that the feature
characteristics were unusual and not foreseen by the model in [29], which was used to obtain the
Z ′(v) FOI estimate. Despite this, the utility based approach was able to trigger two samplers, at
the only two hot-spots detected, whereas the nominal non-utility approach would have triggered
only one, while missing the second peak, which was less than 2.5 km away from the first.
B. Triggering Threshold Sensitivity Analysis
One short-coming of our approach is the need to establish a triggering threshold before the
mission. The lower the threshold, the more local maxima will be considered as hot-spots, thereby
increasing possible locations for sampling.
Fig. 12 shows the variations in the number of hot-spots for all the 10 missions when the
threshold is increased by 0.01 steps in the interval [0.01, 0.99]. In all cases, hot-spots found
within a 60 second temporal window are grouped together and considered to represent the same
hot-spot (the AUV ground speed is about 1.36 m/s, the distance is less than 90 meters and
therefore not significant for capturing biological diversity). As the figure shows, number of hot-
spots increases almost exponentially as the threshold is lowered. Even a small reduction on the
triggering threshold increases the number of hot-spots in almost all missions.
From the figure, one can distinguish two types of missions; those where the number of hot-
spots vary smoothly and those which are piecewise linear. If we compare Fig. 12 with tables II
and III, we can see that our approach behaves better in missions where the number of hot-spots
varies without many granular steps. This is also the case for missions where the threshold is not
set high; so not only are several hot-spots found, but a small threshold increase assures a wide
range of locations to sample, leaving the combined work of fsamplers and fratio to provide for
August 23, 2012 DRAFT

41
0 0.2 0.4 0.6 0.8 10
50
100
150
200
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(a) 2008-05-12
0 0.2 0.4 0.6 0.8 10
50
100
150
200
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(b) 2008-06-26
0 0.2 0.4 0.6 0.8 10
50
100
150
200
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(c) 2008-11-10
0 0.2 0.4 0.6 0.8 10
50
100
150
200
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(d) 2009-11-04
0 0.2 0.4 0.6 0.8 10
50
100
150
200
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(e) 2009-11-09
0 0.2 0.4 0.6 0.8 10
20
40
60
80
100
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(f) 2009-11-10
0 0.2 0.4 0.6 0.8 10
50
100
150
200
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(g) 2009-11-13
0 0.2 0.4 0.6 0.8 10
20
40
60
80
100
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(h) 2009-12-08
0 0.2 0.4 0.6 0.8 10
50
100
150
200
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(i) 2010-03-23
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
3
3.5
4
Sampling Threshold
Num
ber
of h
ot−
spot
s de
tect
ed
(j) 2010-07-01
Fig. 12: Variation of the number of found hot-spots with respect to the sampling threshold Tf , for the 10 missions.The vertical line represents the actual threshold chosen for each mission.
desired spatial coverage.
To evaluate the robustness of our approach we have repeated the calculations shown in Table
III for 10 different thresholds, resulting from altering the original threshold in steps of 5% in
August 23, 2012 DRAFT

42the interval [-25%,25%]. Reductions over 25% are known to generate hot-spots with a very low
value of yv. In reality, for 7 out of the 10 missions a 10% increase yields no hot-spots. As an
example, Fig. 13 shows the variations of percentiles for the three metrics for mission 2009-11-
09. cvµ percentiles are the most stable, with little dependence on the threshold. Conversely, the
values for cvA change substantially as the threshold is reduced. There are two reasons for this;
for low thresholds the poor spatial coverage is due to an early utilization of samplers, which
cannot be compensated by fsamplers. A more steep profile, as in #9, would probably improve the
performance. For thresholds closer to the original, most hot-spots discovered have values only
slightly higher than the threshold. As noted previously for 2008-11-10, not using fsamplers quickly
uses up the samplers, while using it results in empty samplers returned. An earlier activation of
fratio, for example automatically driven by the values of the hot-spots found, would solve the
problem.
VIII. CONCLUSION
We present a utility based technique for discrete adaptive sampling. The principal aim is to
integrate available information including science and operational constraints to decide where a
set of samples can be taken. To do so, a utility is computed based on a priori knowledge and
presumed scientific intent; our current work deals with Weakly Informed and Mission Aware
strategies with the expectation of inclusion of feature aware strategies in the future using the
existing framework. The utility based approach is especially useful in sequential sampling; new
information obtained with previous samples can be integrated to acquire further samples. We
show how the approach compares against a previously published technique using historical AUV
data. The target application is in sampling Intermediate Nepheloid Layers (INL); however the
techniques are general and can be applied to sample most oceanic scalar fields when no a priori
August 23, 2012 DRAFT

43
−25 −20 −15 −10 −5 010
20
30
40
50
60
70
80
90
100
Percentage of threshold variation
Per
cent
ile
cvΣcv
Acvµ
Fig. 13: Variation of the reward function percentiles for the three metrics when the threshold is reduced down by25% in steps of 5%, for November 9th, 2009 mission. No hot-spots are found when the threshold is increased. Xaxis represents the threshold changes in percentage. Y axis shows the percentiles. Values for x = 0 are those oftable III.
model of the feature is available.
We also provide guidance on the appropriate choice of optimization metrics depending on sci-
entific preference for spatial coverage, hot-spot capture or a mix between the two. Experimental
results have shown that, even with Weakly Informed utility functions, our approach performs
better using all the three metrics in comparison to the approach suggested in [29].
This initial effort in sampling has been promising and is likely to lead our work in a number
of different directions. First, we plan to investigate the synthesis of utility functions applying
Machine Learning techniques to historical data; using clustering techniques for mission clas-
sification as a means to learn suitable utilities as reward functions is one approach. The idea
behind this is to explore whether there are ’typical’ mission types: with the FOI concentrated
August 23, 2012 DRAFT

44at the beginning/end, patchy, with many/few hot-spots, etc. The scientist could have a general
idea of what kind of feature distribution to expect, so the parameterization of functions could
be automated. This will require more historical data than what is currently available, both for
clustering and for the automatic selection of parameters for each cluster.
The long term goal is to experiment with Feature Aware strategies where some a priori
knowledge of the field is available. We plan to build a probabilistic model of the feature of
interest as the AUV makes in situ measurements. One approach is by using Gaussian Process
Regression [18] or Kriging as used in spatial statistics. This allows us to estimate the signal and
its uncertainty at unobserved points, and the utility can be altered depending on their proximity
to high-value sample points. Such a model could also be used to predict peaks of the feature of
interest [8]. Given the temporal variability of oceanic features even in very short time periods,
the accuracy of such models for oceanographic phenomena needs study, especially for those
learned offline. Also, using such models, de-correlation scales of features of interest from past
data can be learned. From the models we can obtain a kernel function or variogram that defines
the spatial variability of the data. This can directly be used as an utility function.
A model of the field can also potentially be available using synthetic ocean models such
as [46]; however the inclusion of dynamic features to be modeled within such systems is still
tentative since there is poor to little understanding of such coastal features. Limited skill at the
meso-scale in of itself poses a substantial challenge in the use of such techniques.
A more empirical approach to incorporate feature awareness is to potentially observe the
survey area rapidly with the AUV and in the process build an approximate “map” of the field.
This allows in situ inference to determine the overall characteristics of the survey area and have
the vehicle revisit the vicinity of those locations that have FOI peaks. Having a map of the feature
of interest will allow planning ahead for possible observations with better information. However,
August 23, 2012 DRAFT

45this approach is strongly dependent on the rates of feature evolution and the survey volume. In
a large survey, returning back to location(s) of potential interest which may be impacted by
tides, might not be scientifically interesting. Surveys could also be augmented with shore-side
support from a skilled oceanographer guiding the AUV with targeted commands with support
from remote-sensing data or other synoptic views of the coastal ocean. Our efforts to date are
focused more on the latter as a means to augment on-board situational awareness on the AUV
[9]. Finally, having an a priori estimation of a FOI by any of the former techniques will also
allow in situ estimation of the quality metrics to be included in utility calculations.
IX. ACKNOWLEDGMENT
We thank our colleagues Thom Maughan, Tom O’Reilly, John Ryan, Julio Harvey, Hans
Thomas, Bob Vrijenhoek and the crew of the R/V Zephyr for their valuable support. We thank
Timothy Chung of NPS and Rishi Graham of MBARI for their valuable comments on an early
draft of this paper. Finally, we wish to thank the three anonymous reviewers for their helpful
suggestions in revising the manuscript.
REFERENCES
[1] AURENHAMMER, F. Voronoi diagrams - a survey of a fundamental geometric data structure. ACM Comput. Surv. 23, 3
(1991), 345–405.
[2] BARTAK, R. Modelling soft constraints: a survey. Neural Network World 12, 5 (2002), 421–431.
[3] BARTH, N., AND WUNSCH, C. Oceanographic experiment design by Simulated Annealing. Journal of Physical
Oceanography 20, 9 (1990), 1249–1263.
[4] BINNEY, J., KRAUSE, A., AND SUKHATME, G. S. Informative path planning for an autonomous underwater vehicle. In
Intnl. Conf. on Robotics & Automation (2010).
[5] BIRD, L., SHERMAN, A., AND RYAN, J. P. Development of an active, large volume, discrete seawater sampler for
autonomous underwater vehicles. In Proc Oceans MTS/IEEE Conference (Vancouver, Canada, 2007).
August 23, 2012 DRAFT

46[6] BISTARELLI, S., MONTANARI, U., ROSSI, F., SCHIEX, T., VERFAILLIE, G., AND FARGIER, H. Semiring-based csps and
valued csps: Frameworks, properties, and comparison. Constraints 4 (1999), 199–240.
[7] BRODIE, M., RISH, I., AND MA, S. Optimizing probe selection for fault localization. 12th Intnl. Workshop on Distributed
Systems Operation and Maintenance (DSOM) (October 2001).
[8] COX, D., COX, L. H., AND ENSOR, K. B. Spatial sampling and the environment: some issues and directions. Environmental
and Ecological Statistics 4 (1997), 219–233.
[9] DAS, J., MAUGHAN, T., MCCANN, M., GODIN, M., O’REILLY, T., MESSIE, M., BAHR, F., GOMES, K., PY, F.,
BELLINGHAM, J., SUKHATME, G., AND RAJAN, K. Towards mixed-initiative, multi-robot field experiments: Design,
deployment, and lessons learned. In Proc. Intelligent Robots and Systems (IROS) (San Francisco, California, 2011).
[10] DESHPANDE, A., GUESTRIN, C., MADDEN, S., HELLERSTEIN, J., AND HONG, W. Model-driven data acquisition in
sensor networks. In International Conference on Very Large Data Bases (2004), pp. 588–599.
[11] FERRI, G., JAKUBA, M., AND YOERGER, D. A novel method for hydrothermal vents prospecting using an autonomous
underwater robot. In IEEE International Conference on Robotics and Automation (may 2008), pp. 1055–1060.
[12] FOX, M., LONG, D., PY, F., RAJAN, K., AND RYAN, J. P. In situ analysis for intelligent control. In Proc. of IEEE/OES
OCEANS Conference (2007), IEEE.
[13] FROLOV, S., BAPTISTA, A., AND WILKIN, M. Optimizing fixed observational assets in a coastal observatory. Continental
Shelf Research 28, 19 (2008), 2644 – 2658.
[14] HARVEY, J. B. J., AND GOFF, L. J. A reassessment of species boundaries in cystoseira and halidrys (fucales, phaeophyceae)
along the north american west coast. Journal of Phycology 42 (2006), 707–720.
[15] INCZE, M. L. Optimized deployment of autonomous underwater vehicles for characterization of coastal waters. Journal
of Marine Systems 78, Supplement 1 (2009), S415 – S424. Coastal Processes: Challenges for Monitoring and Prediction.
[16] JONES, W. J., PRESTON, C. M., III, R. M., SCHOLIN, C. A., AND VRIJENHOEK, R. C. A robotic molecular method for
in situ detection of marine invertebrate larvae. Molecular Ecology Resources 8 (2008), 540–550.
[17] K., G. S., JONES, W. J., SCHOLIN, C. A., MARIN, R., AND VRIJENHOEK, R. C. Molecular detection of marine
invertebrate larvae. Marine Biotechnology 8 (2006), 149–160.
[18] KRAUSE, A., AND GUESTRIN, C. Nonmyopic active learning of Gaussian Processes: an exploration-exploitation approach.
In Intnl. Conf. on Machine Learning (New York, NY, USA, 2007), ACM, pp. 449–456.
[19] KRAUSE, A., LESKOVEC, J., GUESTRIN, C., VANBRIESEN, J., AND FALOUTSOS, C. Efficient sensor placement
optimization for securing large water distribution networks. Journal of Water Resources Planning and Management 134,
6 (2008), 516–526.
[20] KRAUSE, A., SINGH, A., AND GUESTRIN, C. Near-Optimal sensor placements in Gaussian Processes: Theory, efficient
August 23, 2012 DRAFT

47algorithms and empirical studies. J. Mach. Learn. Res. 9 (2008), 235–284.
[21] KUMAR, S., CELORRIO, S., PY, F., KHEMANI, D., AND RAJAN, K. Optimizing Hidden Markov Models for Ocean Feature
Detection. In Proceedings 24th Intnl. Florida AI Research Society (FLAIRS) (Palm Beach, FL, 2011), pp. 39–44.
[22] LEGENDRE, P., DALE, M., FORTIN, M., GUREVITCH, J., AND HOHN, M. The consequences of spatial structure for the
design and analysis of ecological field surveys. Ecography 25 (2002), 601–615.
[23] LEONARD, N., PALEY, D., LEKIEN, F., SEPULCHRE, R., FRATANTONI, D., AND DAVIS, R. Collective motion, sensor
networks, and ocean sampling. Proceedings of the IEEE 95, 1 (January 2007), 48–74.
[24] LEONARD, N. E., PALEY, D. A., DAVIS, R. E., FRATANTONI, D. M., LEKIEN, F., AND ZHANG, F. Coordinated control
of an underwater glider fleet in an adaptive ocean sampling field experiment in monterey bay. Journal of Field Robotics
27, 6 (2010), 718–740.
[25] LONG, E., AND WILSON, C. On the identification of toxic hot spots using measures of sediment quality triad. Marine
Pollution Bulletin 34 (1997), 373–374.
[26] LOW, K. H. Multi-Robot Adaptive Exploration and Mapping for Environmental Sensing Applications. PhD thesis, Carnegie
Institute of Technology, Carnegie Melon University, 2009.
[27] MARINONE, S. G., ULLOA, M. J., PARES-SIERRA, A., LAVIN, M. F., AND CUDNEY-BUENO, R. Connectivity in the
northern gulf of california from particle tracking in a three-dimensional numerical model. Journal of Marine Systems 71
(2008), 149–158.
[28] MATHERON, G. Principles of geostatistics. Economic Geology 58 (1963), 1246–1266.
[29] MCGANN, C., PY, F., RAJAN, K., RYAN, J., THOMAS, H., HENTHORN, R., AND MCEWEN, R. Preliminary results for
model-based adaptive control of an autonomous underwater vehicle. In Experimental Robotics, O. Khatib, V. Kumar, and
G. Pappas, Eds., vol. 54 of Springer Tracts in Advanced Robotics. Springer Berlin / Heidelberg, 2009, pp. 395–405.
[30] MCGANN, C., PY, F., RAJAN, K., RYAN, J. P., AND HENTHORN, R. Adaptive control for autonomous underwater vehicles.
In Assoc. for the Advancement of Artificial Intelligence (AAAI) (Chicago, IL, 2008), vol. 3, pp. 1319–1324.
[31] MCGANN, C., PY, F., RAJAN, K., THOMAS, H., HENTHORN, R., AND MCEWEN, R. A Deliberative Architecture for
AUV Control. In Intnl. Conf. on Robotics and Automation (ICRA) (Pasadena, May 2008).
[32] MCPHEE-SHAW, E. Boundary-interior exchange. reviewing the idea that internal-wave mixing enhances lateral dispersal
near continental margins. Deep-Sea Research II 53 (Jan 2006), 45–49.
[33] OLIVEIRA, V. D., AND ECKER, M. D. Bayesian hot spot detection in the presence of a spatial trend: application to total
nitrogen concentration in Chesapeake Bay. Environmetrics 13 (2002), 85–101.
[34] OZMUTLU, H., GAUTAM, N., AND BARTON, R. Managing end-to-end network performance via optimized monitoring
strategies. Journal of Network and Systems Management 10 (2002).
August 23, 2012 DRAFT

48[35] POPA, D., SANDERSON, A., HOMBAL, V., KOMERSKA, R., MUPPARAPU, S., BLIDBERG, R., AND CHAPPEL, S. Optimal
sampling using singular value decomposition of the parameter variance space. In Intelligent Robots and Systems, 2005.
(IROS 2005). 2005 IEEE/RSJ International Conference on (August 2005), pp. 3131 – 3136.
[36] PY, F., RAJAN, K., AND MCGANN, C. A Systematic agent framework for situated autonomous systems. In 9th
International Conf. on Autonomous Agents and Multiagent Systems (Toronto, Canada, May 2010), International Foundation
for Autonomous Agents and Multiagent Systems, pp. 583–590.
[37] RAHIMI, M., PON, R., KAISER, W. J., SUKHATME, G. S., ESTRIN, D., AND SRIVASTAVA, M. Adaptive sampling for
environmental robotics. In IEEE International Conference on Robotics and Automation (2003), pp. 3537–3544.
[38] RASMUSSEN, C. E., AND WILLIAMS, C. Gaussian processes for machine learning. MIT Press, Cambridge, 2006.
[39] RIGBY, P., PIZARRO, O., AND WILLIAMS, S. B. Toward adaptive benthic habitat mapping using gaussian process
classification. Journal of Field Robotics (2010), 741–758.
[40] RIGBY, P., WILLIAMS, S. B., PIZARRO, O., AND COLQUHOUN, J. Effective benthic surveying with autonomous
underwater vehicles. In MTS/IEEE Oceans (Vancouver, Canada, september 2007).
[41] RUDNICK, D., AND PERRY, M. ALPS: Autonomous and Lagrangian Platforms and Sensors, Workshop Report. Tech. rep.,
www.geo-prose.com/ALPS, 2003.
[42] RYAN, J., YODER, J., AND TOWNSEND, D. Influence of a gulf stream warm-core ring on water mass and chlorophyll
distributions along the southern flank of georges bank. Deep-Sea Research II 48 (2001), 159–178.
[43] RYAN, J. P., CHAVEZ, F. P., AND BELLINGHAM, J. G. Physical-biological coupling in monterey bay, california:
Topographic influences on phytoplankton ecology. Marine Ecology Progress Series 287 (2005), 23–32.
[44] RYAN, J. P., JOHNSON, S., SHERMAN, A., RAJAN, K., PY, F., THOMAS, H., HARVEY, J., BIRD, L., PADUAN, J.,
AND VRIJENHOEK, R. Mobile autonomous process sampling within coastal ocean observing systems. Limnology &
Oceanograhy: Methods 8 (2010), 394–402.
[45] SCHOLIN, C. A., MARIN, R., MILLER, P. E., DOUCETTE, G., POWELL, C., HOWARD, J., HAYDOCK, P., AND RAY, J.
Application of dna probes and a receptor binding assay for detection of pseudo-nitzschia (bacillariophyceae) species and
domoic acid activity in cultured and natural samples. Journal of Phycology 35 (1999), 1356–1367.
[46] SHCHEPETKIN, A. F., AND MCWILLIAMS, J. C. The regional oceanic modeling system (ROMS): a split-
explicit, free-surface, topography-following-coordinate oceanic model. Ocean Modeling 9 (2005), 347–404.
doi:10.1016/j.ocemod.2004.08.002.
[47] SINGH, A., BATALIN, M., STEALEY, M., CHEN, V., HANSEN, M., HARMON, T., SUKHATME, G., AND KAISER, W.
Mobile robot sensing for environmental applications. In Field and Service Robotics, C. Laugier and R. Siegwart, Eds.,
vol. 42 of Springer Tracts in Advanced Robotics. Springer Berlin / Heidelberg, 2008, pp. 125–135.
August 23, 2012 DRAFT

49[48] SUN, F., XU, W., JIN, L., AND LI, J. Path planning of autonomous underwater vehicles for optimal environmental
sampling. In OCEANS 2010 IEEE - Sydney (may 2010), pp. 1–4.
[49] VIV-TRUYOLS, G., TORRES-LAPASI, J., VAN NEDERKASSEL, A., HEYDEN, Y. V., AND MASSART, D. Automatic
program for peak detection and deconvolution of multi-overlapped chromatographic signals: Part i: Peak detection. Journal
of Chromatography A 1096, 1-2 (2005), 133 – 145. Chemical Separations and Chemometrics.
[50] WILLCOX, J. S., BELLINGHAM, J. G., ZHANG, Y., AND BAGGEROER, A. B. Performance metrics for oceanographic
surveys with autonomous underwater vehicles. IEEE J. Oceanic Engineering 26 (2001), 711–725.
[51] YOERGER, D. R., JAKUBA, M., BRADLEY, A. M., AND BINGHAM, B. Techniques for deep sea near bottom survey using
an autonomous underwater vehicle. The International Journal of Robotics Research 26, 1 (January 2007), 41–54.
[52] ZHANG, B. Adaptive Sampling with a Robotic Sensor Network. PhD thesis, University of Southern California, 2008.
[53] ZHANG, Y., AND BELLINGHAM, J. G. An efficient method of selecting ocean observing locations for capturing the leading
modes and reconstructing the full field. Journal of Geophysical Research 113 (2008).
[54] ZHANG, Y., MCEWEN, R., RYAN, J., AND BELLINGHAM, J. Design and tests of an adaptive triggering method for
capturing peak samples in a thin phytoplankton layer by an autonomous underwater vehicle. IEEE Journal of Oceanic
Engineering 35, 4 (Oct 2010), 785–796.
[55] ZHU, Z., AND STEIN, M. Spatial sampling design for prediction with estimated parameters. Journal of Agricultural,
Biological, and Environmental Statistics 11, 1 (March 2006), 24–44.
August 23, 2012 DRAFT