rpas application and research activities in lithuania · 9/29/2015 rpas application and research...
TRANSCRIPT
RPAS Application and Research Activities in Lithuania
Antanas Gustaitis Aviation Institute Deputy Director,
Dr. Darius Rudinskas
9/29/2015
Content
• RPAS Applications;
• RPAS Research Activities;
• Future air navigation system: sharing HNIT-Balticand Lithuania Unmanned Aircraft Operators Association (LBONA) practice.
RPAS Application and Research Activities in Lithuania 29/29/2015
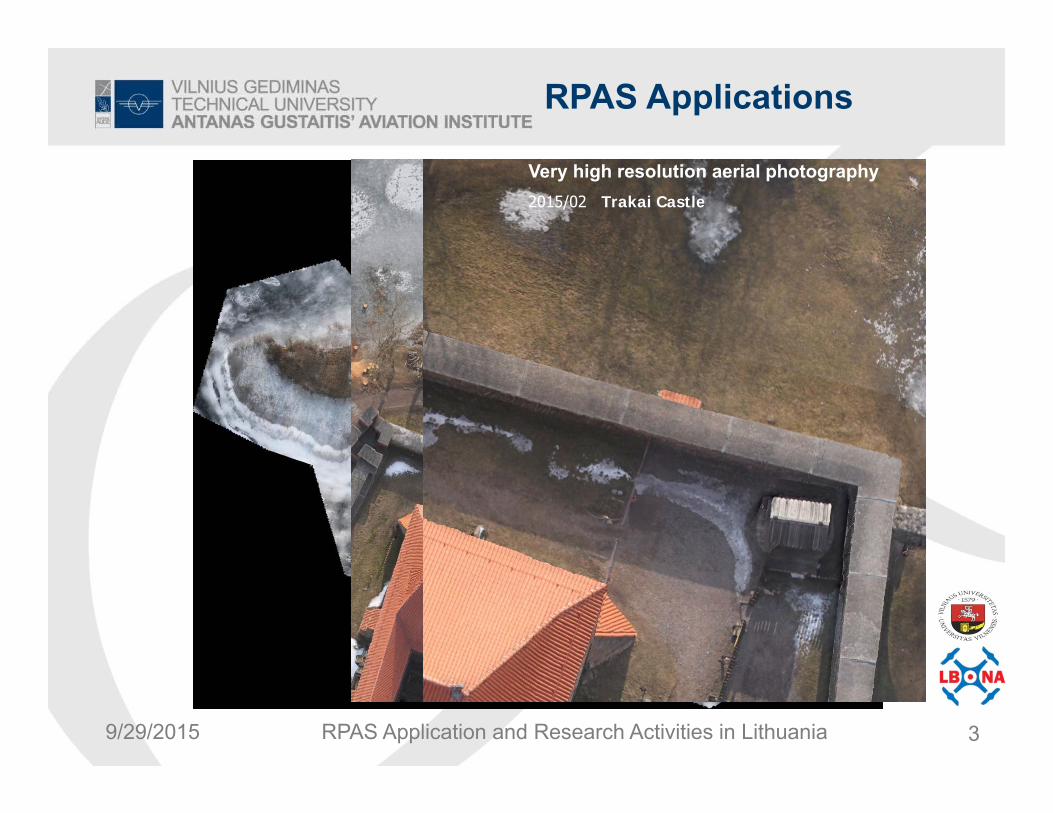
RPAS Applications
Very high resolution aerial photography2015/02 Trakai Castle
RPAS Application and Research Activities in Lithuania 39/29/2015

RPAS Applications
Very high resolution aerial photography2014 – 2015 m. period (Zarasai distr.)
Vasaknų Islands fishing pond movement monitoring
Vasaknos (Zarasų raj.)
2014
RPAS Application and Research Activities in Lithuania 49/29/2015

RPAS Applications
UAV place in to the system of agrarian technology
RPAS Application and Research Activities in Lithuania 59/29/2015

A.To use photographic invisible spectrum.
B. To use photographicin normal infraredspectrum.
Analysis of landed property with UAV applicable in several technological directions:
RPAS Applications
6RPAS Application and Research Activities in Lithuania 69/29/2015
Potencial analysis of landed property using UAV:
1.Fundamental (basic) analysis of agrarian landed property:Purpose: Formation of particular territory soil surface picture (soil type
indentification). Periodicity: often one-time, rarely two or three- time periods.
Result: It is fundamental basis, determinative tipe of household, intensivity and valids complex of economical tools.
2. Diagnostic analysis of agrarian landed propertyPurpose: Getting operational information about feature on landed
property. Periodicity: Often multiplex short-time or long-time analysis, rarely one-
time analysis.
Result: It is operational data on landed property (soil surface, biological production) condition and its qualitative variation in analysing area.
RPAS Applications
7RPAS Application and Research Activities in Lithuania 79/29/2015

2014.10.21 Tabokinės k. Biržai distr.2014.10.09
Tabokinės k. Biržai distr.
Comparison of applicable crop survey methods
RPAS Applications
8RPAS Application and Research Activities in Lithuania 89/29/2015

Simple assessment of natural fauna spoliation in the croplands
RPAS Applications
RPAS Application and Research Activities in Lithuania 99/29/2015

RPAS Applications
10
Detailed assessment of natural fauna spoliation in the croplands
RPAS Application and Research Activities in Lithuania 109/29/2015

RPAS Applications
11
Identification of melioration system and fixing condition (Kaišadoriai distr. (2015 04)
RPAS Application and Research Activities in Lithuania 119/29/2015

RPAS Research Activities
• Design of UAV guidance and control algorithm and analysis;
• Design of UAV integrated system health management methods;
• UAV HIL testing;
UAV control process analysis
, ė
, š ė
_ _ š
_ š ė
_ ė
Hardware in the loop
0 100 200 300 400 500 600 700 80012.26
12.28
12.3
12.32
12.34
12.36
12.38
12.4
12.42
12.44
12.46
Laikas, s
Gre
itis,
m/s
vGPSvPitot
vBJvjungtinis
Apdorojimas jungtiniu Kalmano filtru
Valdiklis
Valdy-mo
paskirs-tymas
Orlaivis
Valdymo sistema
Prieš skrydį nustatyti taškai ir neskraidymo
zonos
Skrydžio metu nustatytos
neskraidymo zonos
Stebėjimo modulis
FDI sistema
Sugedusios pavarosnuokrypis
Pavaros gedimo tikimybė
, ė
, š ė
_ _ š
_ š ė
_ ė
• Flight tests;• Post flight analysis.
RPAS Application and Research Activities in Lithuania 129/29/2015

RPAS Research Activities
• UAV airfoils characteristics (XFOIL, RFOIL, MSES, Eppler-program)
• UAV wing and plane 3-D configuration (PSW, KK-Aero, XFLR5)
• UAV stability and control (VLA)• Aerodynamic, structural, and control-
response analysisof aircraft with flexible wings and fuselages (ASWING)
Aerodynamic design of high performance UAV
RPAS Application and Research Activities in Lithuania 139/29/2015

RPAS Research Activities
Air Traffic Control Simulator
RPAS Application and Research Activities in Lithuania 149/29/2015

RPAS Research Activities
Kyviškės airfield
RPAS Application and Research Activities in Lithuania 159/29/2015

RPAS Research Activities
RPAS Application and Research Activities in Lithuania 169/29/2015

Future air navigation system: sharing HNIT-Baltic and Lithuania
Unmanned Aircraft Operators Association (LBONA) practice
Audrius Kryžanauskas (HNIT-Baltic)Antanas Gedvilas (LBONA)

HNIT-Baltic and LBONA
• HNIT-Baltic – IT company, provides geospatial solutions.• LBONA – Lithuanian Unmanned Aircraft Users
Association. Coordinating, licensing, certifying, consulting pilots.
• We united our experience for drone real-time tracking experiment
RPAS Application and Research Activities in Lithuania 189/29/2015
Regulations and restrictions to drones
• Unmanned aircraft in Lithuania must be used in accordance with rules on the use of unmanned aircraft, approved by the Director of Civil Aviation Administration in 23 January 2014.
• There are restrictons in the rules, that are applied to alldrones
– Over 400 feet (~ 120 meters) flight is prohibited– Flight must be made in visible zone, not further than 1000
from drone operator• There are restrictions, based on specific place
– Airports– Obstacles
• Some zones are restricted by local municipalities– Dangerous objects– Harazdous materials– Prisons– ...
www.nydaylynews.com
In order to fly in restricted zone, drone operatormust obtain permission from Civil AviationAdministration
RPAS Application and Research Activities in Lithuania 199/29/2015

Future
• Civil Aviation Administration investigating possibilitiesto track drones outside “visible” range of the flight – To control situation in the sky (Civil Aviation
Administration)– Drone must be tracked during the flight, declaring
its position to Civil Aviation Administration– Permission to flight if such function is implemented– To avoid crossing of restricted zones and inform
users– To control own drones– To find lost drone– Best currently available network for signal
transmission is GSM
RPAS Application and Research Activities in Lithuania 209/29/2015

The Problem
• Real-time drone tracking (near real time) is needed– Drone must be tracked during the flight and
coordinates transmitted to independent centralorganization (CAA)
• This is not usual tracking system– Information must be sent to data center at regular
time interval. Usual tracking systems are sending position via SMS on demand.
– SMS is not acceptable, because required tracking interval is 1-5 seconds.
• Size and weight of tracking device. It influences size of drone.
RPAS Application and Research Activities in Lithuania 219/29/2015
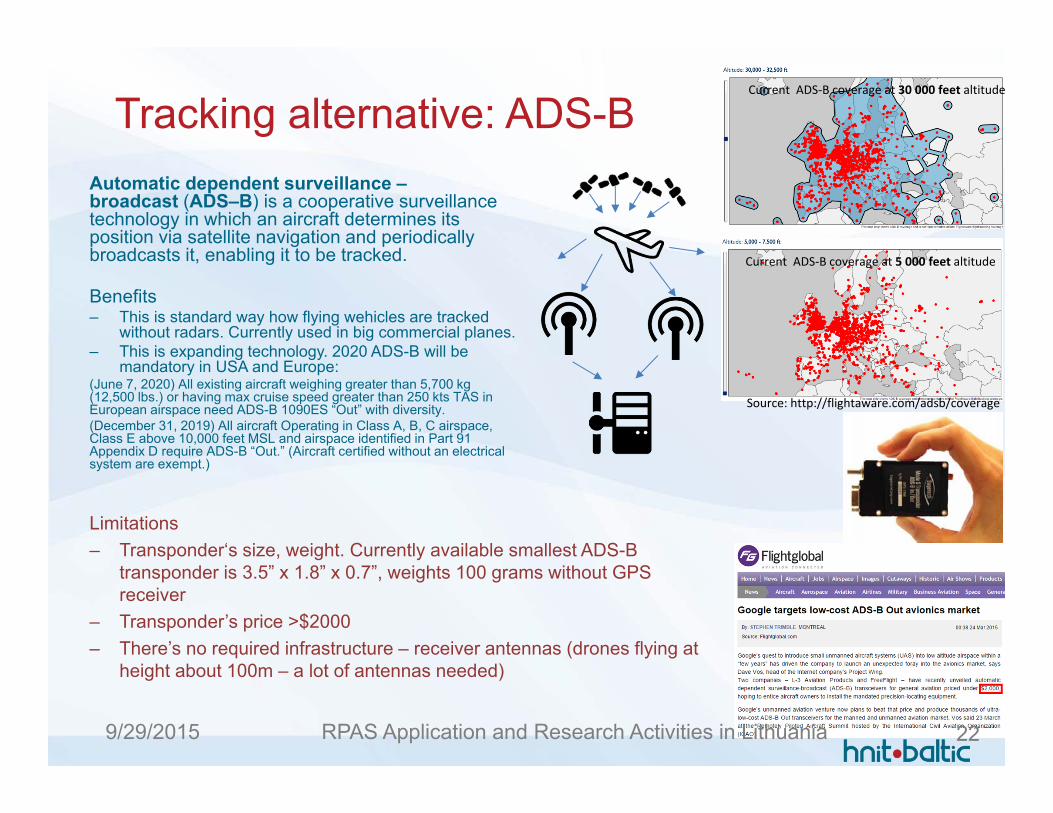
Tracking alternative: ADS-B
Limitations– Transponder‘s size, weight. Currently available smallest ADS-B
transponder is 3.5” x 1.8” x 0.7”, weights 100 grams without GPS receiver
– Transponder’s price >$2000– There’s no required infrastructure – receiver antennas (drones flying at
height about 100m – a lot of antennas needed)
Source: http://flightaware.com/adsb/coverage
Current ADS‐B coverage at 5 000 feet altitude
Current ADS‐B coverage at 30 000 feet altitude
Automatic dependent surveillance –broadcast (ADS–B) is a cooperative surveillance technology in which an aircraft determines its position via satellite navigation and periodically broadcasts it, enabling it to be tracked.
Benefits– This is standard way how flying wehicles are tracked
without radars. Currently used in big commercial planes.– This is expanding technology. 2020 ADS-B will be
mandatory in USA and Europe:(June 7, 2020) All existing aircraft weighing greater than 5,700 kg (12,500 lbs.) or having max cruise speed greater than 250 kts TAS in European airspace need ADS-B 1090ES “Out” with diversity.(December 31, 2019) All aircraft Operating in Class A, B, C airspace, Class E above 10,000 feet MSL and airspace identified in Part 91 Appendix D require ADS-B “Out.” (Aircraft certified without an electrical system are exempt.)
RPAS Application and Research Activities in Lithuania 229/29/2015
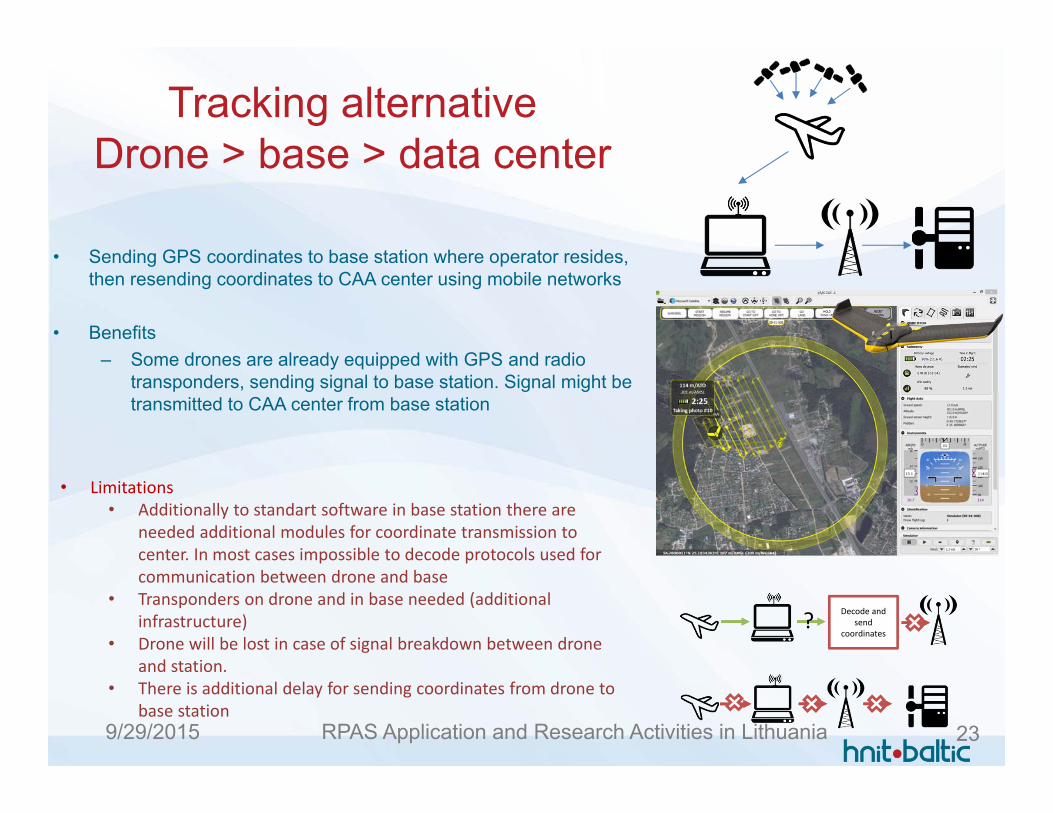
Tracking alternativeDrone > base > data center
• Sending GPS coordinates to base station where operator resides, then resending coordinates to CAA center using mobile networks
• Benefits– Some drones are already equipped with GPS and radio
transponders, sending signal to base station. Signal might be transmitted to CAA center from base station
• Limitations• Additionally to standart software in base station there are
needed additional modules for coordinate transmission to center. In most cases impossible to decode protocols used for communication between drone and base
• Transponders on drone and in base needed (additional infrastructure)
• Drone will be lost in case of signal breakdown between drone and station.
• There is additional delay for sending coordinates from drone to base station
Decode andsend
coordinates?
RPAS Application and Research Activities in Lithuania 239/29/2015

Tracking alternative:Drone > data center
• Sending GPS coordinates from drone directly to independent center(Civil Aviation administration), using mobile networks
• Benefits– Smartphones as transponders might be used– Ready to use mobile network infrastructure– Independent from drone operator
• Limitations– GSM device on the drone – additional weight– Weight of smartphone – there are unused parts and sensors– Flying to high may influence loss of GSM coverage, because
the most GSM antennas are oriented to the ground
Image: www.cellular‐expert.com
RPAS Application and Research Activities in Lithuania 249/29/2015
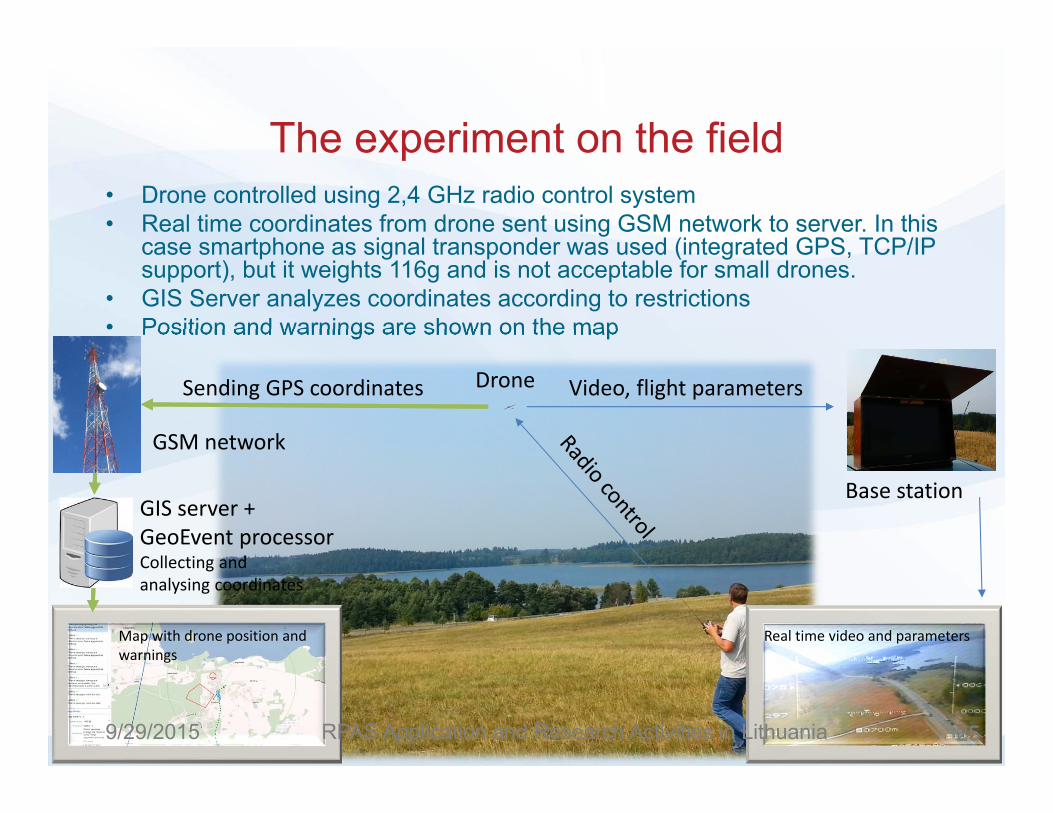
The experiment on the field• Drone controlled using 2,4 GHz radio control system• Real time coordinates from drone sent using GSM network to server. In this
case smartphone as signal transponder was used (integrated GPS, TCP/IP support), but it weights 116g and is not acceptable for small drones.
• GIS Server analyzes coordinates according to restrictions• Position and warnings are shown on the map
Sending GPS coordinates Video, flight parameters
Map with drone position and warnings
Drone
Base station
Real time video and parameters
GSM network
GIS server +GeoEvent processorCollecting and analysing coordinates
RPAS Application and Research Activities in Lithuania 259/29/2015

Tracking infrastructure
• Drone Kolibris (constructed by A.Gedvilaslength:150cm, width: 180cm, weight: 2 kg). Equipedwith camera, telemetric sensors.
• Mobile phone (Samsung Galaxy S2, weight: 116g). Sending coordinates using UDP protocol every2 seconds
• Bite GSM mobile network (2G for sending coordinates, 3G for live map application)
• ArcGIS Server with GeoEventprocessor extension – receives signal, analyzes coordinates
• Map Application – displaying droneposition and warnings in real time
RPAS Application and Research Activities in Lithuania 269/29/2015

Processing coordinates• ArcGIS Server
– Storing GIS data – restricted zones– Collecting coordinates– Displaying map application
• Server extension GeoEvent processor– Analysing coordinates– Fixing critical events (flight limitation, crossing restricted zone)– Sending warning information to server and displaying on the map
Input drone coordinates
Position on the map & warnings
Height warning
Approaching restricted zone
Crossing restricted zoneLeaving „visible“ range
RPAS Application and Research Activities in Lithuania 279/29/2015
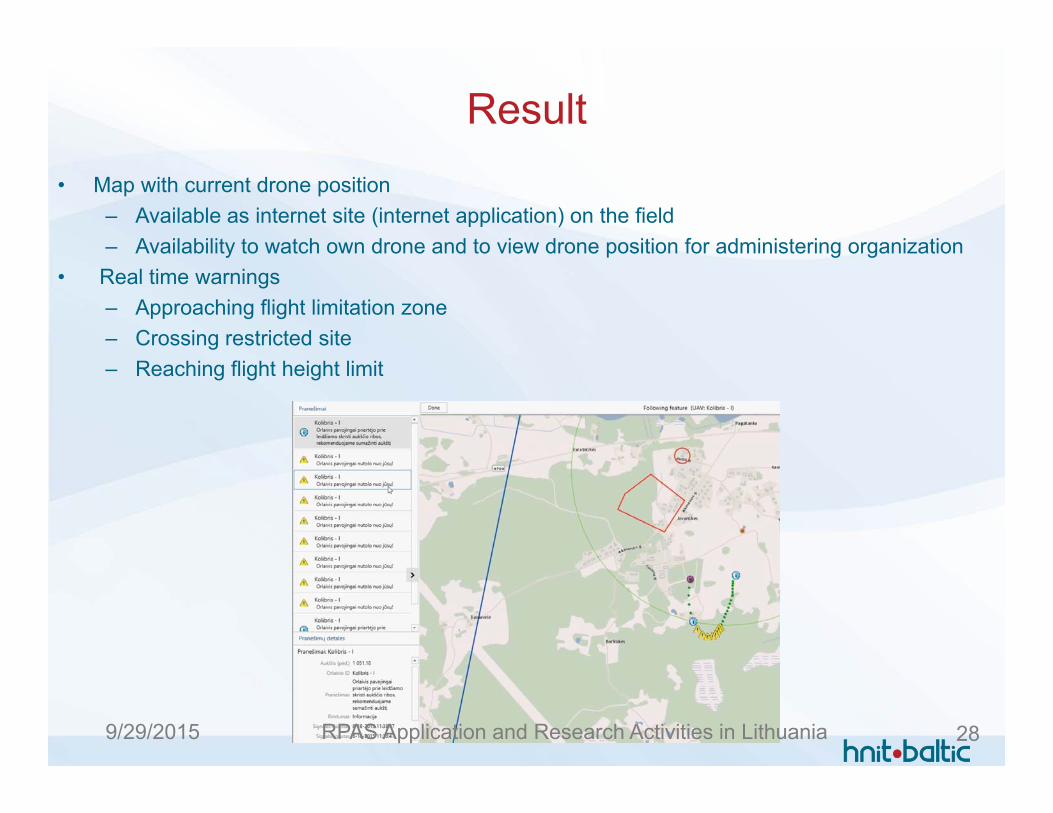
Result• Map with current drone position
– Available as internet site (internet application) on the field– Availability to watch own drone and to view drone position for administering organization
• Real time warnings– Approaching flight limitation zone– Crossing restricted site– Reaching flight height limit
RPAS Application and Research Activities in Lithuania 289/29/2015

Video of field experiment
RPAS Application and Research Activities in Lithuania 299/29/2015

Dr. Darius Rudinskas
Audrius Kryžanauskas
Phd Ričardas Skorupskas
Antanas Gedvilas
VILNIUS UNIVERSITY(Department of Geographyand Land Management)
Lithuania Unmanned Aircraft Operators Association (LBONA)
IT company, provides geospatial solutions
Thank you for your attention
RPAS Application and Research Activities in Lithuania 309/29/2015