rock physics modeling of unconsolidated sands: accounting for
TRANSCRIPT

Rnm
R
lbitia
©
GEOPHYSICS, VOL. 73, NO. 6 �NOVEMBER-DECEMBER 2008�; P. E197–E209, 9 FIGS.10.1190/1.2985821
ock physics modeling of unconsolidated sands: Accounting foronuniform contacts and heterogeneous stress fields in the effectiveedia approximation with applications to hydrocarbon exploration
an Bachrach1 and Per Avseth2
gt�nlWesstsOmaeidl
ni�mtgesttflbds
receiveslb.com
ABSTRACT
By treating contact stiffness as a variable, one can extendthe effective medium approximation used to obtain elasticstiffness of a random pack of spherical grains. More specifi-cally, we suggest calibrating effective media approximationbased on contact mechanics by incorporating nonuniformcontact models. The simple extension of the theory providesa better fit for many laboratory and field experiments and canprovide insight into the micromechanical bonds associatedwith unconsolidated sediments. This approach is motivatedby repeated observations of shear-wave measurements in un-consolidated sands where observed shear-wave velocities arelower than predicted by the Hertz-Mindlin contact theory. Wepresent the calibration process for well-log data from a NorthSea well penetrating a shallow-gas discovery and a deepwa-ter well in the Gulf of Mexico. Finally, we demonstrate thebenefit of using this model for amplitude variation with angle�AVA� analysis of shallow sand targets in exploration and res-ervoir studies.
INTRODUCTION
The effective properties of sphere packs have been used as an ana-og for the behavior of unconsolidated sands for many years. Contactetween two spheres has been well characterized for different load-ng paths, boundary conditions, and grain radii �Johnson, 1985�, andhe forces acting on a two-particle arrangement have been character-zed using normal and tangential stiffness �Winkler, 1983; Norrisnd Johnson, 1997; Mavko et al., 1998�.
Manuscript received by the Editor 18 December 2007; revised manuscript1WesternGeco/Schlumberger, Houston, Texas, U.S.A. E-mail: rbachrach@2Rock Physics TechnologyAS, Bergen, Norway. E-mail: [email protected] Society of Exploration Geophysicists.All rights reserved.
E197
Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to
The effective medium approximation �EMA� associated withranular media attempts to average two-grain contacts into the effec-ive behavior of a pack of aggregates with many contacts. Gassmann1951� calculates the effective elastic properties of a dense hexago-al pack of spheres and compares the results to those of seismic ve-ocity measurements in unconsolidated sands. Digby �1981� and
alton �1987� develop effective-medium-averaging techniques tostimate the effective properties of a random sphere pack while con-idering contact laws for adhesive contacts, rough contacts, andmooth contacts. Winkler �1983� shows that for Hertz-Mindlin con-act stiffness, the simple volumetric averaging of Digby can be pre-ented in terms of normal to tangential stiffness ratios. Muhlhaus andka �1996� analyze dispersion and wave propagation in granularedia using homogenization of discrete equations of motion. Norris
nd Johnson �1997� rederive the EMA of Walton and Digby usingnergy density functions for different contact models and show that,n general, because the contact force between the grain is path depen-ent �i.e., relates to the history of loading�, the EMAwill relate to theoading path.
With the advancement of computer power, the use of granular dy-amic models has improved the understanding of the elastic behav-or of a random pack of spheres and associated force distributionsMakse et al., 1999, 2004�. These studies show that although bulkodulus is predicted well using EMAtheory, shear-modulus predic-
ions do not follow conventional EMA predictions because therains tend to relax from the affine, macroscopic deformation �i.e.,ach grain translates according to the direction of the macroscopictrain� or rotate. The effect of rotation of grain is also studied by Pas-ernak et al. �2006�. The assumption of affinity given by the EMAheory is approximately valid for the bulk modulus but seriouslyawed for the shear modulus. Thus, the uniform strain assumptionreaks down, causing the EMA approximation for granular pack toiffer considerably from observed values. Several experimentaltudies demonstrate significant differences between the shear modu-
d 11April 2008; published online 18 November 2008.; [email protected].
SEG license or copyright; see Terms of Use at http://segdl.org/

lce
siHrtitVcpw
rpfscaswpn
oicaep2
C
Jwc
m1
watel
abv
w
ius
wfiSc
lmgzg
ntk
Ds
idstcc
T�
E198 Bachrach andAvseth
i predicted by Hertz-Mindlin effective medium models and empiri-al results, including Winkler �1983�, Goddard �1990�, and Zimmert al. �2007�.
One consequence of the inadequacies of using EMA to describehear behavior is in the prediction of Poisson’s ratio and VP/VS ration unconsolidated sands �e.g., Avseth and Bachrach, 2005; Sava andardage, 2006�. Manificat and Guéguen �1998� show that a contact
oughness model can explain the higher-than-expected Poisson’s ra-io observed in sands. Bachrach et al. �2000� show that while analyz-ng P- and S-wave velocities in unconsolidated sands, different con-act curvatures of grains can be accounted for and will not change the
P/VS ratio. In near-surface sediments, the observed Poisson’s ratioan be used to determine the fraction of slipping contacts to nonslip-ing contacts by simple averaging of two representative media: oneith and one without tangential contact stiffness.We address two dependent problems that often appear when using
ock-physics models in granular media. The first problem is the ex-ansion of the EMA theory of Norris and Johnson �1997� to accountor variable contact models in granular systems. Specifically, wehow that choosing a binary model where tangential stiffness of aontact can be zero, or following Hertz-Mindlin, enables us to deriven EMA for granular pack where all contacts are not the same. Theecond problem we address is applying the theory to real data, wheree show the calibration process depends on additional granularroperties such as effective contact ratio, not just the coordinationumber.
The paper is organized as follows: We first provide a short reviewf the basic theory associated with EMAof granular media. Next, wentroduce the binary contact model that accounts for nonuniformontacts in EMA. We follow with a detailed discussion of the stepsssociated with model calibration for real data. Finally, we presentxamples of how the theory is applied to well-log data and rock-hysics template analysis �Ødegaard andAvseth, 2004; Avseth et al.,005�.
THEORETICAL BACKGROUND
ontact stiffness
In this section, we closely follow the derivation of Norris andohnson �1997�. All detailed derivation is given in their paper. Here,e only repeat relevant equations associated with nonuniform grain-
ontact forces.Asingle contact between two spheres can be characterized by nor-al and tangential stiffness, defined as �Winkler, 1983; Mavko et al.,
998�
Sn ��Fn
��, S� �
�Ft
��, �1�
here Fn,Ft are the normal and tangential components of the forcecting on the contact and where � and � are the normal and tangen-ial displacements, respectively, resulting from such a force. In gen-ral, the behavior of a single contact between spheres depends on theoading path and additional parameters such as friction, cement, and
Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to
dhesions �Norris and Johnson, 1997�. The actual normal stiffnessetween two elastic spheres has been modeled and experimentallyerified �Johnson, 1985� using the Hertzian contact model:
Sn �4aG
1 � �, �2�
here
a � �R̄� � �3 3FnR̄�1 � ��/8G �3�
s the radius of contact area between two spheres, G is the shear mod-lus, and � is Poisson’s ratio of the sphere material, which is as-umed to be isotropic.
The effective contact radius R̄ is defined as
R̄ � 0.5� 1
R1�
1
R2��1
, �4�
here R1 and R2 are the radii of the two grains in contact, as shownrst by Hertz in his 1882 seminal paper, “On the Contacts of Elasticolids” �Love, 1927; Johnson, 1985�. Note that R̄ is related to theurvature of the actual contact surface.
To derive the tangential stiffness, one needs to assume a specificoading path and boundary conditions. One choice of the tangential
odel is the perfectly smooth case �Walton, 1987�, where the tan-ential stiffness is zero.Another typical choice associated with Hert-ian contact and friction is the Hertz-Mindlin model, where the tan-ential stiffness is given by �Mindlin, 1949�
St �8aG
2 � �. �5�
As discussed by Norris and Johnson �1997�, the tangential stiff-ess depends on the boundary conditions and loading path. In prac-ice, for most poorly consolidated sediments, these are often not wellnown. This subject will be discussed further.
erivation of effective bulk modulus for a dry pack ofpherical grains under hydrostatic loading
To illustrate how the effective bulk modulus of a random pack ofdentical spheres can be obtained, we present the following simpleerivation. The pressure is defined as force/area. If we consider theolid fraction of a spherical volume of radius R with porosity �hrough which the forces are transmitted and we consider n points ofontacts per spheres �also known as the coordination number�, wean write the hydrostatic pressure as
�P� �Fn�1 � ��n
4�R2 . �6�
his equation is identical to equation 71 in Norris and Johnson1997�. Note that in equation 6 the normal contact force, which is a
SEG license or copyright; see Terms of Use at http://segdl.org/

led
Bm
w�
starsdrted
Es
ddcwrd
wv
rv
U
�
os
M
lwnw
B
pwgnhm1pi
i
w�
ss
a1
Tsm
Modeling unconsolidated sands E199
ocal point, is averaged along a spherical radius R, which is associat-d with the representative volume of the grain. This point will be ad-ressed later. The effective volumetric increment is defined as
�e� �dV
V�
4�R2dR
4�R3/3�
3dR
R. �7�
ulk modulus relates the pressure increment to the volume incre-ent; therefore,
Keff �d�P��e�
��1 � ��n
12�R
dFn
dR�
�1 � ��n12�R
Sn, �8�
hich is identical to the formulas derived by Norris and Johnson1997� and Walton �1987�.
In the simple derivation above, equation 6 is the EMA for hydro-tatic state of stress. EMAassumes that because the forces are not in-eracting with each other, on average the pressure can be representeds the force times the contact number that acts on the solid part of aeference sphere. Equation 7 is the EMA for strain, where it is as-umed that the volumetric deformation can be related to the normalisplacement dR. We also distinguish between the effective contactadius R̄ and the volumetric averaging radius R. Although R̄ affectshe contact stiffness of a two-grain configuration, the volumetric av-raging radius R is the volume over which EMA is performed. Thisistinction is discussed later.
ffective elastic modulus with normal and tangentialtiffness
The derivation of effective bulk modulus is very simple, but theerivation of effective shear modulus for hydrostatic loading and theerivation of elastic modulus for nonhydrostatic loading are moreomplicated.An elegant derivation of the effective media associatedith granular packs is given by Norris and Johnson �1997�, who de-
ive the effective elastic moduli by differentiating the strain energyensity per unit volume U, defined as
U �1
V�
contacts F · du , �9�
here F ·du � Fnd� � Ft ·d� with respect to strain and V is theolume associated with EMAaveraging.
The assumption made by Digby �1981�, Walton �1987�, and Nor-is and Johnson �1997� is that all contacts are the same and that theolumetric average associated with equation 9 is
�1
V�
contacts F · du
n�1 � ��V0
� F · du� �10�
Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to
equation 20 in Norris and Johnson �1997��, where V0 is the volumef a single grain. Note that the EMAaveraging rule is also used in theimple form of equation 8.
EXTENSION OF EMA FORNONUNIFORM CONTACTS
otivation
As discussed in the introduction, the stress distribution on granu-ar packs is nonuniform. The tangential contact stiffness associatedith two grains is path dependent, so it is clear that equation 10 willot capture such heterogeneities. In the next section, we discuss oneay to accommodate stress-field heterogeneities.
inary scheme
We now consider a case where all contacts are not the same.Asim-le way to introduce different contacts is to assume a binary mixhere some contacts may behave as smooth contacts with zero tan-ential stiffness and other contacts may have finite tangential stiff-ess, as given by equation 5. This assumption tries to account for theeterogeneities in stress chains as observed in laboratory measure-ents and numerical simulations �Ammi et al., 1987; Mueth et al.,
998; Geng et al., 2001; Makse et al., 2004�. The binary model, sim-lified from the true grain pack, can be viewed as a specific probabil-ty distribution of nonuniform contacts.
Given the binary model assumption, and because the strain energys linear, we can rewrite equation 10 as
U � Usmooth � Uno-slip �smooth contacts
F · du
� �no-slip contacts
F · du �n�1 � ��
V0� fs� F · du�
� f t� F · du�� , �11�
here f s is the fraction of smooth contacts in the system and f t � 1f s is the fraction of no-slip contacts. Equation 11 says that the
train energy density for unit volume can be related to more than apecific type of boundary condition.
The macroscopic stress-strain relations are derived by differenti-ting equation 11 with respect to the strain �Norris and Johnson,997, their equation 30�:
� ij ��U
�eij�
�Usmooth
�eij�
�Uno-slip
�eij. �12�
he effective elastic modulus is then given by the combination ofmooth and no-slip contacts, which is a simple average of elasticoduli formulas derived by Walton �1987� and Norris and Johnson
SEG license or copyright; see Terms of Use at http://segdl.org/

�o
tea
wdacc
ai
eptfat
m
K
Tc
Fc
wWroPtal
�
bsas
S
adAcprteliglst
pftsifrmvX
Ft
E200 Bachrach andAvseth
1997�. Similar conclusions can be reached using the forces actingn the contacts as derived by Walton �1987�.
For a homogeneous system �i.e., a granular pack where all con-acts are the same�, one can write the stress-strain relations associat-d with equation 12 as �e.g., Muhlhaus and Oka, 1996; Pasternak etl., 2006�
� ij � Cijkl* �Sn,St�ekl, �13�
hich is the effective medium approximation of the elastic moduluserived from equation 12 for identical contacts with given normalnd tangential stiffness. Then, from the linearity of equation 12, wean write the macroscopic stress-strain relations for nonuniformontacts as
� ij � �fsCijkl* �Sn,St � 0� � f tCijkl
* �Sn,St � 0��ekl �14�
nd the overall effective stiffness as Cijkl* �Sn,St�. The case of f t � 0.5
s similar to the case investigated by Manificat and Guéguen �1998�.It is also interesting to note that equation 14 suggests the Voigt av-
rage, which implies isostrain �Mavko et al., 1998�, is the one appro-riate isostrain condition to the binary contact problem. Recall thathe macroscopic stress-strain relationships were derived in this caserom a general energy density function. Equation 12 assumes that anveraged macroscopic strain can be defined over the volume. Thus,he isostrain interpretation is consistent with equation 14.
For the specific case of hydrostatic loading, the bulk and shearoduli for Hertz-Mindlin contacts are given by
eff �n�1 � ��
12�RSn, Geff �
n�1 � ��20�R
�Sn �3
2St� . �15�
he effective shear modulus in terms of volume fraction of no-slipontacts f t is given by
Keff �n�1 � ��
12�RSn, Geff �
n�1 � ��20�R
�Sn � f t3
2St� .
�16�
0.25
0.2
0.15
0.1
0.05
00 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Poi
sson
'sra
tio
Fraction of no-slip contacts
igure 1. Effective dry Poisson’s ratio as a function of volume frac-ion of no-slip contacts.
Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to
ollowing Bachrach et al. �2000�, using equations 2, 3, and 14, wean write the effective Poisson’s ratio in terms of f t as
� eff �Sn � f tSt
4Sn � f tSt�
�2 � ��4�2 � �� � 2f t�1 � ��
�2f t�1 � ��
4�2 � �� � 2f t�1 � ��, �17�
hich clearly shows that for f t � 0, � eff � 1/4, as first derived byalton �1987�. Equation 17 also shows that the effective Poisson’s
atio is only a function of the mineral Poisson’s ratio and the fractionf no-slip contacts, where an increase in no-slip contacts will reduceoisson’s ratio. In Figure 1, we present the result of applying equa-
ion 17 to quartz spheres.Asimilar result is produced by Bachrach etl. �2000�, which is derived using the Hashin-Shtrikman upper andower bounds.
It is important to bear in mind that the maximum value of � eff
1/4 is a dry value. The presence of pore fluid in the system shoulde addressed separately. �One approach is to use Gassman’s relation-hips, following Gassman’s �1951� example.� The theory does notccount for surface processes that may occur in the presence of re-idual water saturation or for cement.
mooth contacts and slip during wave propagation
Seismic waves possess very small strain amplitudes, so one maysk if slippage occurs when a shear wave passes. The mathematicalerivation of EMAin the previous section uses a given state of stress.s sediments are compacted, pressure increases and porosity de-
reases. When mapping elastic moduli versus burial depth, as aroxy to elastic moduli versus increasing stress, it is clear that as po-osity reduces in a nonreversible way, grains slip and rotate duringhe compaction process. However, at a given burial depth with a giv-n state of stress and porosity, when one probes the formation with aow-strain-amplitude seismic wave, does zero tangential stiffnessmply that grains must slip? Winkler �1979, 1983� points out that, ineneral, for seismic waves with small strain amplitudes, frictionalosses are not observed, which can be interpreted as either there is nolip at the grain contacts or there is no friction between grain con-acts.
At first, these two explanations seem to be at odds. However, ex-erimental and numerical simulation of granular packs shows thatorce distribution is not homogeneous and, in general, not all con-acts are stressed. Moreover, analysis of photoelastic images oftress chains �Majmudar and Behringer, 2005� has shown that undersotropic loading, the normal forces are larger than the tangentialorces in granular packs. In addition, stress anisotropy imposes di-ection-dependent elastic behavior of grain contacts. Thus, the seis-ic velocities as described by Hertzian contact theory will likely di-
erge farther from observed values because of stress anisotropy �seeu, 2002 and Vega, 2003, among others�.
SEG license or copyright; see Terms of Use at http://segdl.org/

wTintps
Em
s
Hbwkp
R̄
w
R̄acr
dsntfgccd
w
wacen�
llvcmlbc
P
fa
klS
1
2
3
Fl
Modeling unconsolidated sands E201
From equation 16, it is clear that shear waves will propagate evenhen all grains are smooth �or if all tangential forces are zero�.herefore, one way to understand the granular pack is by determin-
ng what fraction of the low-strain shear load is supported only byormal forces, relative to the fraction supported by both normal andangential forces. We also note that, in general, f t may be stress de-endent. We revisit this issue in the well-log example and discussionections.
ffective contact curvature, coordination number, andodel calibration in reservoir settings
From equations 2–6 and 16, we can write the effective bulk andhear moduli for hydrostatic loading explicitly as
Keff � � �1 � ��2G2
18�2�1 � ��2�1/3�n2 R̄
R�1/3
P1/3
Geff � 1
10�12�1 � ��2G2
�2�1 � ��2 �1/3�n2 R̄
R�1/3
P1/3�� 3
10�12�1 � ��2G2�1 � ��
�2�2 � ��3 �1/3
��n2 R̄
R�1/3
P1/3� f t. �18�
ere, P is the effective pressure at grain contacts. When predictingulk and shear moduli for sands at given depth using this equation,e normally assume mineralogy, porosity, and overburden stress asnown parameters. However, as shown in equation 18, calibrationarameters are related to both coordination number n and the ratio
/R, unless the granular aggregate is made out of identical spheres
here R̄/R � 1. We note, as shown schematically in Figure 2, that
/R can be larger or smaller than one. The ratio R̄/R captures somespects of grain angularity and sorting, and it can be viewed as a me-hanical parameter that characterizes the averaged effective contactadii and general grain-size distribution.
Another issue with model calibration is that, in general, the coor-ination number changes with the porosity of the sediment and withtress. Murphy �1982� establishes the relationship between coordi-ation number and porosity from theory and observations for porosi-y ranges between 0.2 and 0.6, where for 20% porosity n � 14 andor 60% porosity n � 4.78. Makse et al. �1999� shows that in theirranular dynamic simulation, for low-effective-stress ranges, theoordination number can change without a porosity change but willhange with a pressure change. Their coordination number/pressureependency is formulated as
n�P� � 6 � � P
P0�1/3
, �19�
Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to
here P0 is an empirical-fitting parameter.It is interesting to note that for random pack at low effective stress
ith porosity of 36%, Murphy’s �1982� coordination number isbout nine, but Makse et al. �1999� predict a coordination numberlose to six. In natural materials, stress and compaction are related toach other. In our opinion, it is beneficial to look at the coordinationumber as a function of porosity and stress. If we follow Bowers’1995� definition of the virgin compaction curve, it is possible to re-ate the coordination number to porosity and stress in a fashion simi-ar to the way stress and porosity are related to each other along theirgin compaction curve. Thus, the choice of relating porosity to theoordination number �Murphy, 1982� is a statement that the sedi-entary pack is following a specific compaction curve, such as the
oading curve �Bowers, 1995�. One way to reconcile the numbers ofoth Murphy �1982� and Makse et al. �1999� is to consider differentompaction/stress history associated with sediment burial.
roposed workflow for parameter calibration
From the above discussion, it is clear that to calibrate a model to,or instance, well-log data, we must account for porosity, pressure,nd effective contact curvature radius. However, without specific
nowledge of either coordination number or R̄/R, we suggest the fol-owing steps to calibrate sedimentary characteristics from P-wave,-wave, and density data.
� Derive dry Poisson’s ratio �using the Gassmann theory; seeMavko et al. �1998�� and estimate f t from Poisson’s ratio �orVP/VS ratio� using equation 17.
� Derive effective stress from Terzaghi’s principle, P � Pover
� PP, where Pover is the overburden stress and PP is the porepressure. �Because we are dealing with unconsolidated sedi-ment, we assume that Biot’s coefficient of effective stress isclose to unity.�
� Use equation 18 to fit functional dependence for effective dry
shear modulus such that a constant c � �n2R̄/R� is estimatedwhen fitting the data. For hydrostatic pore pressure under nor-mal loading situations, we recommend using the coordinationnumber/porosity relation compiled by Murphy �1982� and giv-en in Mavko et al. �1998�, and we neglect pressure dependen-cies. If the reservoir has gone through changes in pore pressurebecause of production, one must define a different dependencybecause stress path affects the seismic response and compac-tion of sediments �Sayers, 2006�. This may be done by the cali-brating equation 19 through laboratory experiments.
igure 2. Illustration of three contact scenarios where R̄/R can bearger or smaller than one.
SEG license or copyright; see Terms of Use at http://segdl.org/

45
bccssp
W
g
VtuTzt
rltaoup
R̄btni
FPz
E202 Bachrach andAvseth
� Use equation 18 to derive dry bulk modulus for the system.� Use Gassmann’s equation �see Mavko et al., 1998� to correct
for in situ saturations.
The calibration parameter f t is a characteristic of the sedimentaryed. For a single well log with different sand beds, one may have toalibrate this constant for each individual bed. This calibration pro-edure does not affect dry Poisson’s ratio �or VP/VS ratio� and micro-tructure parameter f t because they are independent of c. Micro-tructure parameter c provides insight into the general texture andacking of the sediment.
APPLICATION FOR HYDROCARBONEXPLORATION
ell-log observations
Figure 3 shows well-log data from Avseth et al. �2007� �a shallow-as reservoir offshore Norway�, including sonic velocities �VP and
Dep
th(m
)
b)a) c) d)
P-velocity(km/s)
S-velocity(km/s)
Density(g/cm3)
igure 3. Well-log observations of shallow unconsolidated sands emoisson’s ratio � , �e� porosity, �f� gamma ray �GR�, and �g� water saone of laminated sands between 605 and 615 m �data fromAvseth et
Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to
S�, density, Poisson’s ratio, porosity, gamma-ray data, and satura-ion. Note the large drop in P-wave velocity and Poisson’s ratio in thepper thick sand interval �i.e., zone with low gamma-ray values�.his unit is filled with gas. A thinner sand unit lies below the gasone, which is water saturated. Here, the Poisson’s ratio is higherhan the background Poisson’s ratio of the shale.
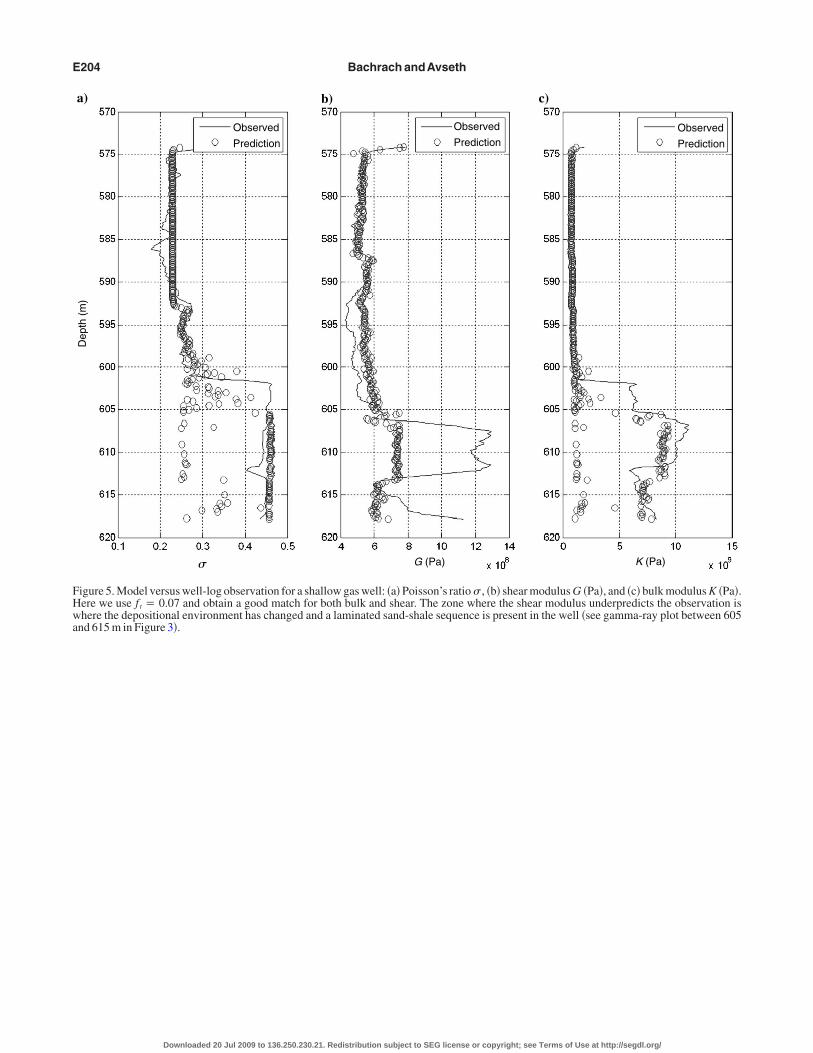
We apply the five-step procedure described above and derive theesults shown in Figures 4 and 5. If we use the original Hertz-Mind-in contact theory with only no-slip grain contacts �f t � 1�, we ob-ain a poor match between predicted and observed shear modulusnd Poisson’s ratio �Figure 4�. However, using the estimated valuef f t � 0.07, we obtain a good match for all the elastic moduli. If wese the coordination number as a function of porosity from Mur-hy’s �1982� approximation, we can derive the averaged ratio of
/R � 2/3. The shear modulus is still predicted wrong in the zoneetween 605 and 615 m. A closer look at the well-log data showshat, in this zone, the depositional environment changes and a lami-ated sand-shale sequence is present, a geologic characteristic notncluded in our modeling.
e) f) g)
Porosity GR Sw
d in shales: �a� P-wave velocity, �b� S-wave velocity, �c� density, �d�n SW. The dashed line embraces the zone of interest. Note the small07�.
�
beddeturatioal., 20
SEG license or copyright; see Terms of Use at http://segdl.org/

FW
Modeling unconsolidated sands E203
Depth
(m)
a) b) c)
G (Pa) K (Pa)�
Observed
Prediction
Observed
PredictionObserved
Prediction
igure 4. Model versus well-log observation for a shallow-gas well: �a� Poisson’s ratio � , �b� shear modulus G �Pa�, and �c� bulk modulus K �Pa�.
e use f t � 1 and obtain a good match for bulk but poor for shear.Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to SEG license or copyright; see Terms of Use at http://segdl.org/
FHwa
E204 Bachrach andAvseth
a) b) c)D
epth
(m)
Observed
Prediction
Observed
PredictionObserved
Prediction
� G (Pa) K (Pa)
igure 5. Model versus well-log observation for a shallow gas well: �a� Poisson’s ratio � , �b� shear modulus G �Pa�, and �c� bulk modulus K �Pa�.ere we use f t � 0.07 and obtain a good match for both bulk and shear. The zone where the shear modulus underpredicts the observation ishere the depositional environment has changed and a laminated sand-shale sequence is present in the well �see gamma-ray plot between 605
nd 615 m in Figure 3�.
Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to SEG license or copyright; see Terms of Use at http://segdl.org/
M�
sscsWul
n0
tpb
p
s
st
RIe
Atrois
Fs
Modeling unconsolidated sands E205
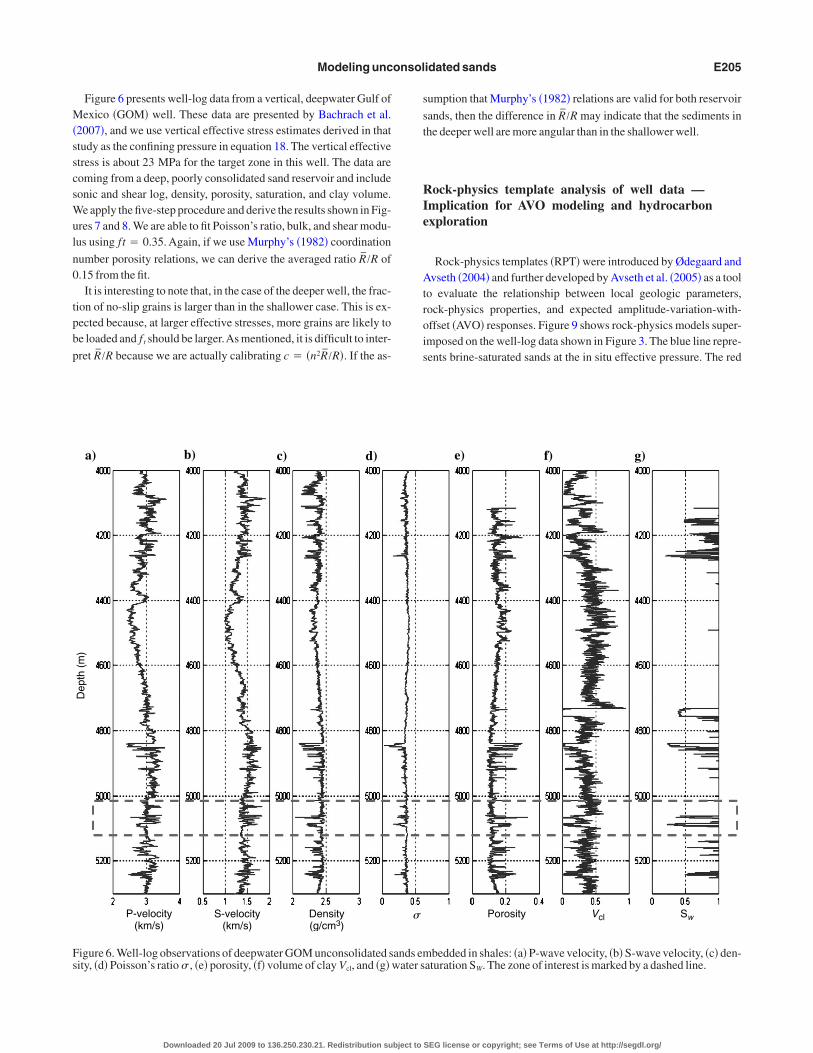
Figure 6 presents well-log data from a vertical, deepwater Gulf ofexico �GOM� well. These data are presented by Bachrach et al.
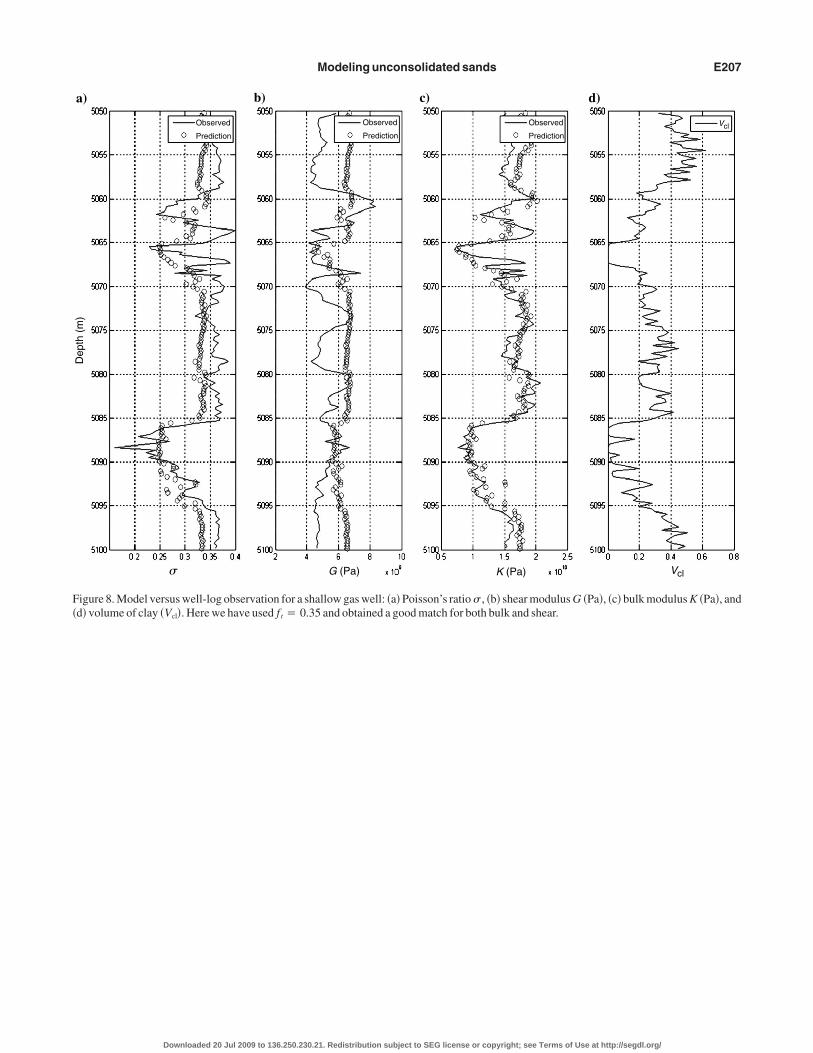
2007�, and we use vertical effective stress estimates derived in thattudy as the confining pressure in equation 18. The vertical effectivetress is about 23 MPa for the target zone in this well. The data areoming from a deep, poorly consolidated sand reservoir and includeonic and shear log, density, porosity, saturation, and clay volume.e apply the five-step procedure and derive the results shown in Fig-
res 7 and 8. We are able to fit Poisson’s ratio, bulk, and shear modu-us using ft � 0.35. Again, if we use Murphy’s �1982� coordination
umber porosity relations, we can derive the averaged ratio R̄/R of.15 from the fit.
It is interesting to note that, in the case of the deeper well, the frac-ion of no-slip grains is larger than in the shallower case. This is ex-ected because, at larger effective stresses, more grains are likely toe loaded and f t should be larger.As mentioned, it is difficult to inter-
ret R̄/R because we are actually calibrating c � �n2R̄/R�. If the as-
a)
Dep
th(m
)
S-velocity(km/s)
Density(g/cm3)
P-velocity(km/s)
b) c) d)
igure 6. Well-log observations of deepwater GOM unconsolidated sity, �d� Poisson’s ratio � , �e� porosity, �f� volume of clay V , and �g�
clDownloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to
umption that Murphy’s �1982� relations are valid for both reservoir
ands, then the difference in R̄/R may indicate that the sediments inhe deeper well are more angular than in the shallower well.
ock-physics template analysis of well data —mplication for AVO modeling and hydrocarbonxploration
Rock-physics templates �RPT� were introduced by Ødegaard andvseth �2004� and further developed by Avseth et al. �2005� as a tool
o evaluate the relationship between local geologic parameters,ock-physics properties, and expected amplitude-variation-with-ffset �AVO� responses. Figure 9 shows rock-physics models super-mposed on the well-log data shown in Figure 3. The blue line repre-ents brine-saturated sands at the in situ effective pressure. The red
Porosity V Sw
e) f) g)
cl
bedded in shales: �a� P-wave velocity, �b� S-wave velocity, �c� den-aturation S . The zone of interest is marked by a dashed line.
�
ands emwater s
WSEG license or copyright; see Terms of Use at http://segdl.org/

F�
E206 Bachrach andAvseth
a)Dep
th(m
)
G (Pa) K (Pa) Vcl
Observed
Prediction
Observed
Prediction
Observed
Prediction
Vcl
b) c) d)
�
igure 7. Model versus well-log observation for a deepwater GOM well: �a� Poisson’s ratio � , �b� shear modulus G �Pa�, �c� bulk modulus KPa�, and �d� volume of clay �V �. We have used f � 1 and obtained a good match for bulk, but poor for shear.
cl tDownloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to SEG license or copyright; see Terms of Use at http://segdl.org/
F�
Modeling unconsolidated sands E207
a)
Dep
th(m
)
b) c) d)
� G (Pa) K (Pa) Vcl
VclObserved
Prediction
Observed
Prediction
Observed
Prediction
igure 8. Model versus well-log observation for a shallow gas well: �a� Poisson’s ratio � , �b� shear modulus G �Pa�, �c� bulk modulus K �Pa�, andd� volume of clay �V �. Here we have used f � 0.35 and obtained a good match for both bulk and shear.
cl tDownloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to SEG license or copyright; see Terms of Use at http://segdl.org/

lsums
undamudnkaApl
c
sPnees
pfiwgtdc�icdTtgmarL
bwmabmuswvis
uaSGs
A
A
A
F��t
E208 Bachrach andAvseth
ine represents the 100% gas-saturated sands. The green line repre-ents a best-fit shale model. In Figure 9a, we assume no slip for thenconsolidated sand model, whereas in Figure 9b, we use the esti-ated value of f t � 0.07 and obtain a very good match between the
and models and the sand-rich data points.The RPT analysis indicates that the shallow sands are completely
nconsolidated and the sand grains are packed loosely with close too friction at the contacts. The dry and wet VP/VS ratios are affectedrastically by this reduced shear effect; the acoustic impedances areffected relatively weakly by this effect. The improved rock-physicsodels for unconsolidated sands demonstrated in this study can help
s better predict expected AVO signatures at very shallow burialepths. In particular, this reduced shear effect can cause an otherwiseo- or low-impedance contrast with negative AVA gradient, alsonown as class II or class III AVO response, to turn into low imped-nce with positive AVO gradient �class IV AVO response� �seevseth and Bachrach, 2005 for details�. Hence, this effect may ex-lain why class IV AVO signatures are commonly observed in shal-ow, unconsolidated sediments.
DISCUSSION
We have shown how we can describe the seismic properties of un-onsolidated sands, taking into account reduced tangential shear
5
4.5
4
3.5
3
2.5
2
1.5
1
VP
/VS
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Sha
leV
olum
e
1000 2000 3000 4000 5000 6000 7000 8000
a)
Acoustic impendance (g/m2s)
b)5
4.5
4
3.5
3
2.5
2
1.5
1
VP
/VS
1000 2000 3000 4000 5000 6000 7000 8000Acoustic impendance (g/m2s)
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Sha
leV
olum
e
igure 9. RPT analysis of well-log data from a shallow gas reservoir:a� no-slip �i.e., Hertz-Mindlin formulation� and �b� slip factor f t
0.07. We obtain an improved match with the well-log data usinghe reduced shear model.
Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to
tiffness during wave propagation. The parameter f t, derived fromoisson’s ratio, can be interpreted as the accommodation of EMA toonuniform contact properties. In our two examples, f t for the deep-r sands was larger than the value for the shallow well. In general, wexpect that as stresses increase, more contacts get locked and thus f t
hould be stress dependent.When we use two parameters, we will always be able to fit com-
ressional and shear data such as well logs. However, our goal is tond a model that can be used in predicting AVO responses and withhich we can gain physical insight into the microstructure of theranular aggregate. We have defined the two important microstruc-ure parameters as f t and c � �n2R̄/R�. We have shown that the coor-ination number should not be considered independently from theontact radius of curvature. In the literature, expressions for n
n��� or n � n�P� are found. However, a more general approachs to have n � n��,P�. Because porosity depends on pressure �orompaction process� as well as sorting, we do not think that the coor-ination number by itself is a good parameter for model calibration.he parameter c � �n2R̄/R� can capture information about compac-
ion and provide some idea about the general contact stiffness. For aiven unconsolidated sand layer, where pressure is not changinguch, it is reasonable to relate the coordination number to porosity
nd to derive R̄/R from the fitting process, as demonstrated. This pa-ameter should correlate with the geometric aspects of the contact.aboratory tests can verify if this is indeed the case.
CONCLUSIONS
The seismic properties of unconsolidated sands can be describedy taking into account reduced tangential shear stiffness duringave propagation. We have extended EMA by introducing a binaryodel for grain contacts and a parameter f t, which represents the
mount of nonslipping contacts in the mixture. The parameter f t cane derived from Poisson’s ratio and can be interpreted as the accom-odation of EMA to nonuniform contact properties. We apply the
pdated contact models to a shallow hydrocarbon discovery off-hore Norway and a poorly consolidated sand reservoir in the deep-ater GOM and obtain an improved match between well-log obser-ations and rock-physics models. This modeling approach can helpmprove our understanding of AVO signatures in unconsolidatedands.
ACKNOWLEDGMENTS
The authors thank StatoilHydro for permission to publish the datased in this study. Thanks also to Torbjørn Fristad, Erik Ødegaard,nd Aart-Jan van Wijngaarden at StatoilHydro, and Gary Mavko attanford University for valuable discussions. We thank Yvesuéguen, Boris Gurevich, and three anonymous reviewers for con-
tructive comments that improved this manuscript.
REFERENCES
mmi, B., D. Bideau, and J. P. Troadec, 1987, Geometrical structure of disor-dered packing of regular polygons, comparison with disc packing struc-ture: Journal of Physics D—Applied Physics, 20, 424–428.
vseth, P., and R. Bachrach, 2005, Seismic properties of unconsolidatedsands: Tangential stiffness, VP/VS ratios and diagenesis: 75thAnnual Inter-national Meeting, SEG, ExpandedAbstracts, 1473–1476.
vseth, P., R. Bachrach, A.-J. van Wijngaarden, T. Fristad, and E. Ødegaard,2007, Application of contact mechanics to hydrocarbon prediction in shal-
SEG license or copyright; see Terms of Use at http://segdl.org/

A
B
B
B
D
G
G
G
JL
M
M
—
M
M
M
M
M
M
N
Ø
P
S
S
V
W
W
X
Z
Modeling unconsolidated sands E209
low sediments: 69th Conference & Technical Exhibition, EAGE, Extend-edAbstracts, F024.
vseth, P., T. Mukerji, and G. Mavko, 2005, Quantitative seismic interpreta-tion: Applying rock physics tools to reduce interpretation risk: CambridgeUniversity Press.
achrach, R., J. Dvorkin, and A. Nur, 2000, Seismic velocities and Poisson’sratio of shallow unconsolidated sands: Geophysics, 65, 559–564.
achrach, R., S. Noeth, N. Banick, M. Sengupta, G. Bunge, B. Flack, R.Utech, C. Sayers, P. Hooyman, L. den Boer, L. Leu, W. Troyer, and J.Moore, 2007, From pore-pressure prediction to reservoir characterization:A combined geomechanics-seismic inversion workflow using trend-krig-ing techniques in a deepwater basin: The Leading Edge, 26, 590–595.
owers, G. L., 1995, Pore pressure estimation from velocity data: Account-ing for overpressure mechanisms beside undercompaction: Society of Pe-troleum Engineers Drilling & Completion paper 27488.
igby, P. J., 1981, The effective elastic moduli of porous granular rocks:Journal ofApplied Mechanics, 48, 803–808.
assmann, F., 1951, Elastic wave through a packing of spheres: Geophysics,16, 673–685.
eng, J., D. Howell, R. P. Behringer, G. Reydellet, L. Vanel, and E. Clement,2001, Footprints in the sands: The response of granular material to localperturbations: Physical Review Letters, 87, 035506.
oddard, J. D., 1990, Nonlinear elasticity and pressure-dependent wavespeeds in granular media: Proceedings of the Royal Society of London, Se-riesA, Mathematical and Physical Sciences, 430, 105–131.
ohnson, K. L., 1985, Contact mechanics: Cambridge University Press.ove, A. E. H, 1927, Atreatise on the mathematical theory of elasticity: Cam-bridge University Press.ajmaudar, T. S., and R. P. Behringer, 2005, Contact force measurementsand stress-induced anisotropy in granular materials: Nature, 23,1079–1082.akse, H. A., N. Gland, D. L. Johnson, and L. Schwartz, 1999, Why effec-tive medium theory fails in granular materials: Physical Review Letters,83, 5070–5073.—–, 2004, Granular packings: Nonlinear elasticity, sound propagation andcollective relaxation dynamics: Physical Review E, 70, 061302.anificat, G., and Y. Guéguen, 1998, What does control VP/VS in granularrocks?: Geophysical Research Letters, 25, no. 3, 381–384.
Downloaded 20 Jul 2009 to 136.250.230.21. Redistribution subject to
avko, G., T. Mukerji, and J. Dvorkin, 1998, The rock physics handbook:Cambridge University Press.indlin, R. D., 1949, Compliance of bodies in contact: Journal of AppliedMechanics, 16, 259–268.ueth, M. D., H. M. Jaeger, and S. R. Nagel, 1998, Force distribution ingranular medium: Physical Review E, 57, 3164–3169.uhlhaus, H. B., and F. Oka, 1996, Dispersion and wave propagation in dis-crete and continuous models for granular materials: International Journalof Solids and Structures, 33, 2841–2858.urphy, W. F., 1982, Effect of microstructure and pore fluids on the acousticproperties of granular sedimentary materials: Ph.D. dissertation, StanfordUniversity.
orris, A. N., and D. L. Johnson, 1997, Non-linear elasticity of granular me-dia: Journal ofApplied Mechanics, 64, 39–49.
degaard, E., and P. Avseth, 2004, Well log and seismic data analysis usingrock physics templates: First Break, 22, 37–43.
asternak, E., H. B. Muhlhaus, and A. V. Dyskin, 2006, Finite deformationmodel of simple shear of fault with microrotations: Apparent strain locali-sation and en-echelon fracture pattern: Philosophical Magazine, 86, 3339–3371.
ava, D., and B. Hardage, 2006, Rock physics models of gas hydrates fromdeepwater, unconsolidated sediments: 76thAnnual International Meeting,SEG, ExpandedAbstracts, 1913–1917.
ayers, C. M., 2006, Sensitivity of time lapse seismic to reservoir stress path:Geophysical Prospecting, 54, 369–380.
ega, S., 2003, Intrinsic and stress-induced velocity anisotropy in unconsoli-dated sands: Ph.D. dissertation, Stanford University.alton, K., 1987, The effective moduli of a random packing of spheres: Jour-nal of the Mechanics and Physics of Solids, 33, 213–226.inkler, K. W., 1983, Contact stiffness in granular and porous materials:Comparison between theory and experiment: Geophysical Research Let-ters, 10, 1073–1076.
u, S., 2002, Stress-induced anisotropy in unconsolidated sands and its ef-fect on AVO analysis: 72nd Annual International Meeting, SEG, Expand-edAbstracts, 105–108.
immer, M., M. Prasad, G. Mavko, and A. Nur, 2007, Seismic velocities inunconsolidated sands: Part 1—Pressure trends from 0.1 to 20 MPa: Geo-physics, 72, no. 6, E1-E13.
SEG license or copyright; see Terms of Use at http://segdl.org/