robustness of input shaping to nonlinear drive dynamics 29 november 2004
DESCRIPTION
Robustness of Input Shaping to Nonlinear Drive Dynamics 29 November 2004. J. Atwood & A. Reich Professor W. Singhose GTA: J. Lawrence. Outline. Project Description and Justification Results Future Research Questions. Input Shaping Theory. ZV Shaper:. UM-ZV Shaper:. - PowerPoint PPT PresentationTRANSCRIPT

Robustness of Input Shaping to Nonlinear Drive
Dynamics
29 November 2004
J. Atwood & A. ReichProfessor W. Singhose
GTA: J. Lawrence

Outline
Project Description and Justification
Results Future Research Questions

Input Shaping Theory
UM-ZV
Shaper:
ZV Shaper:

Problem Statement Current input shapers assume linear dynamics

Problem Statement Unequal Rise/Fall Times inhibit shaper effectiveness

Goal
Characterize non-linear performance of current input shapers
Evaluate new, robust input shaper
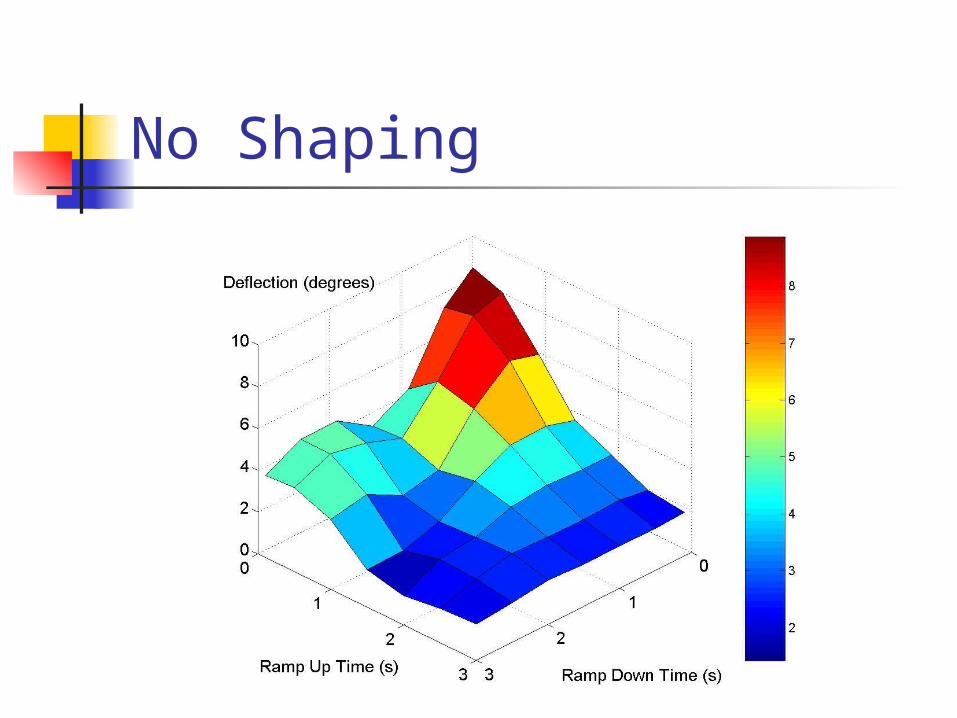
No Shaping

ZV Shaping

UMZV Shaping

Modified UMZV Shaper

Comparison With No Shaping

Comparison with ZV Shaper

Comparison with UMZV Shaper
0
20
40
60
80
100
Time
Vel
ocity
(% o
f Max
)
Linear Rise, rise time=tr Exponential Rise, time constant=τ

Future Work
Retest modified UM-ZV shaper under exponential motor drive.
Expand space to investigate faster rise and fall times.

Questions??