robustification de lois de commande prédictive - … · introduction avantages de la commande...
TRANSCRIPT

École d’été francophone CA’NTI 23/2017
Cristina Stoica [email protected]
Robustification de lois de commande prédictive

Robustification de lois de commande prédictive2 24/05/2017
Applications

Plan du cours
Introduction
Concepts de la commande prédictive
Mise en œuvre : approche MPC
Introduction sur les LMIs
Robustification via la parametrisation de Youla
Conclusion
Quelques références
3 24/05/2017Robustification de lois de commande prédictive
Plan du cours
Introduction
Concepts de la commande prédictive
Mise en œuvre : approche MPC
Introduction sur les LMIs
Robustification via la parametrisation de Youla
Conclusion
Quelques références
4 24/05/2017Robustification de lois de commande prédictive
IntroductionAvantages de la commande prédictive Facilité de mise en œuvre (bonnes performances et simplicité
d’implémentation)
Effet anticipatif : par utilisation explicite de la trajectoire à suivre dans lefutur
Technique bien adaptée pour commande des systèmes complexes : systèmes multivariables, systèmes
soumis aux contraintes, systèmes non linéaires, systèmes hybrides,systèmes à retard, systèmes Multi-Agent…
problèmes de suivi de trajectoire sans/sous contraintes (entrées, sorties,états), pour lesquels la trajectoire à suivre est parfaitement connue àl’avance et planifiée
différents objectifsparmi les commandes avancées les plus utilisées dans le milieu industriel
5 24/05/2017Robustification de lois de commande prédictive

IntroductionApplications industrielles 1979 Dynamic Matrix Control (DCM) : industrie pétrolière
Plus de 1000 applications répertoriées (Qin&Badgwell’03) Robots, machines-outils, industrie chimique ou biochimique, aéronautique,
thermique, l’industrie du ciment, bâtiment intelligent … Exemple : régulation de vitesse des ascenseurs de la tour Eiffel
surtout pour des systèmes avec une trajectoire à suivre connue à l’avance
Historique Début à la fin des années ’70 (Richalet et al., Cutler&Ramaker)
Améliorations dans les années ’90 : faisabilité, stabilité en boucle fermée
Maturité depuis le début des années 2000 : commande prédictive robuste (Mayne etal.), solutions explicites, commande prédictive des systèmes hybrides et non-linéaires,applications aux systèmes rapides
2010 : commande prédictive stochastique, distribuée, décentralisée, économique
6 24/05/2017Robustification de lois de commande prédictive

IntroductionPrincipe de fonctionnement Effet anticipatif
Trajectoire connue et planifiée
Horizon glissant
Prise en compte des contraintes
7
Horizon de prédiction
Temps TempsNkkk 1 Nkkkk )1(11
y y
ry
u u
ry
Principe de l’horizon fuyant
PrésentPassé
Horizon de prédiction
24/05/2017Robustification de lois de commande prédictive

Plan du cours
Introduction
Concepts de la commande prédictive Principes de base
Choix du modèle du processus
Paramètres de réglage
Mise en œuvre : approche MPC
Introduction sur les LMIs
Robustification via la parametrisation de Youla
Conclusion
Quelques références
8 24/05/2017Robustification de lois de commande prédictive

Concepts de la commande prédictive
Principes de base Elaboration (choix) du modèle numérique du système sur lequel est fondée
la prédiction de la sortie
Spécification de la trajectoire que doit suivre la sortie
Minimisation d’un critère quadratique à horizon fini élaborant uneséquence de commandes futures
Application du premier élément de la séquence de commande au systèmeet au modèle
Répétition à chaque période
d’échantillonnage
(principe de l’horizon fuyant)
caractère anticipatif9 24/05/2017Robustification de lois de commande prédictive

Concepts de la commande prédictive
Choix du modèle du processus Un bon modèle = le plus simple possible, mais malgré tout suffisamment
significatif et adapté aux besoins, en offrant des prédictions suffisammentprécises une connaissance appropriée du système
Un modèle résultant souvent d’une phase d’identification
Un modèle capable de prédire le comportement du système
Souvent un modèle linéaire
Généralement un modèle à temps discret
Procédure Modèle initial premier essai de commande prédictive
Modèle retouché nouvelle loi de commande prédictive
Remarque Simplicité du modèle l’intérêt de l’utilisation en milieu industriel
10 24/05/2017Robustification de lois de commande prédictive

Concepts de la commande prédictive
Paramètres de réglage (cas sans contraintes) Fonction de coût Structure du critère Facteurs de pondérations
sur l’erreur de poursuite ( ) sur l’effort de commande ( )
Horizons de prédiction Horizon inférieur ( ) de prédiction sur la sortie Horizon supérieur ( ) de prédiction sur la sortie Horizon de prédiction sur la commande ( )
Choix de la période d’échantillonnage
Remarque MIMO : généralement les mêmes horizons de prédiction sur toutes les
sorties, ainsi que les mêmes horizons de commande11
1N2N
uN
JQJR
1ou / 11 NTdN e
er TtN /2 uu NN ou 1
IQJ
1
0
2
)(
2
)()()()(ˆ
2
1
u
JJ
N
iiR
N
NiiQr ikikikJ uyy
24/05/2017Robustification de lois de commande prédictive

Plan du cours Introduction Concepts de la commande prédictive Mise en œuvre : approche MPC
Modèle sous forme d’état Prédiction de la sortie Minimisation du critère Tableau récapitulatif Exemple
Introduction sur les LMIs Robustification via la parametrisation de Youla Conclusion Quelques références
12 24/05/2017Robustification de lois de commande prédictive

Mise en œuvre : approche MPC Modèle sous forme d’état : système MIMO (m entrées, p sorties)
Ajout d’une action intégrale pour annuler les erreurs statiques
Représentation d’état étendue
Prédiction de la sortie
13
111 ,,,,,où ,)()(
)()()1(
pmnnpmnnn
kkkkk
RRRRRR yuxCBAxCy
uBxAx
)()1()( kkk uuu
mpem
emnm
eeee
eeee
kkk
kkkkk
,,
,,,)1()()(où ,
)()()()()1(
0CCIBBI0
BAAuxx
xCyuBxAx
1
0
)(
0
1 )()1()()/(ˆ)(ˆi
j
jk
j
l
jii lkkkkikik
u
uuBACxACyy
24/05/2017Robustification de lois de commande prédictive

Mise en œuvre : approche MPC Minimisation du critère pour l’élaboration de la loi de commande
Forme matricielle du critère
avec
et
14
1
0
2
)(
2
)()()()(ˆ
2
1
u
JJ
N
ii
N
Niir ikikikJ
RQuyy
2222 )()()()()()(JJJJ
kkkkkkJ r RQRQ UΘUΦUYY
)1()(ˆ)()()()1()(ˆ)(
kkkkkkkk
r uΦxΨYΘUΦuΦxΨY
)(kU
Commandes futuresEtat étendu et
consignes futures
)()()( T1T kk JJJ ΘQΦΦQΦRU
i
j
jii
NNNNNNN
N
N
N
N
N
u011
01
1
1
,00
,,212122
1
2
1
2
1
BACΣΣΣΣΣ
ΣΣΦ
Σ
ΣΦ
CA
CAΨ
,)1(
)()(,
)(
)()(,
)(ˆ
)(ˆ)(
2
1
2
1
ur
r
rNk
kk
Nk
Nkk
Nk
Nkk
u
uU
y
yY
y
yY
))(())((
idiagidiag
JJ
JJ
QQRR
0)(
kJ
U
24/05/2017Robustification de lois de commande prédictive

JJJNmmm uQΦΦQΦR0Iμ T1T
)1(, )(
Mise en œuvre : approche MPC Loi de commande Séquence de commandes futures obtenue par minimisation du critère J Par application du principe de l’horizon fuyant, seule la première valeur de
cette séquence est appliquée au système
où
et
15
)(ky
0CBA)( 2Nkr y )(ku )(ku
)(kex
Modèle étendu
L
FrFr
FrFr
DCBA )(kFry
rF
)()()( 2 kNkk err LxyFu μΦμΨLLL 21avec
)1(21
)( 12,,, NNpmmmnmmnm RRRR μLLL
1
21
),1(
)1(,
)1(),1(
12
12
12
12
1212
NNFr
NNFr
p
pNNpFr
NNppp
NNppNNpFr
μD
μμμC
I0
B
00I0
A
24/05/2017Robustification de lois de commande prédictive

Mise en œuvre : approche MPC Tableau récapitulatif Définition de la consigne
Choix du modèle sous la forme d’une représentation d’état (matrices A, B, C), choix d’une période d’échantillonnage
Choix des paramètres de réglage de la fonction de coût
Calcul direct des matrices nécessaires pour la mise sous forme matricielle du critère J
Dans le cas où l’état est mesurable, synthèse de la matrice L (« retour d’état ») du correcteur équivalent
16 24/05/2017Robustification de lois de commande prédictive

Mise en œuvre : approche MPC Exemple : commande MPC d’un réacteur
Discrétisation avec
Représentation d’état avec
Ajout d’action intégrale système étendu
Paramètres de réglage MPC :
17
1y
2u
2y
1u
)()(
4,012
5,011
3,015
7,011
)()(
2
1
2
1sUsU
ss
sssYsY
Débit d’alimentation
Débit de refroidissement
TempératureConcentration
min03,0eT2,2,4 pmn
2890,002329,0009516,001678,0,
5,005,00
025,0025,0
,
9277,000009048,000009418,000009580,0
CBA
pJmJuNNN IQIR ,05,0,2,3,1 21
24/05/2017Robustification de lois de commande prédictive
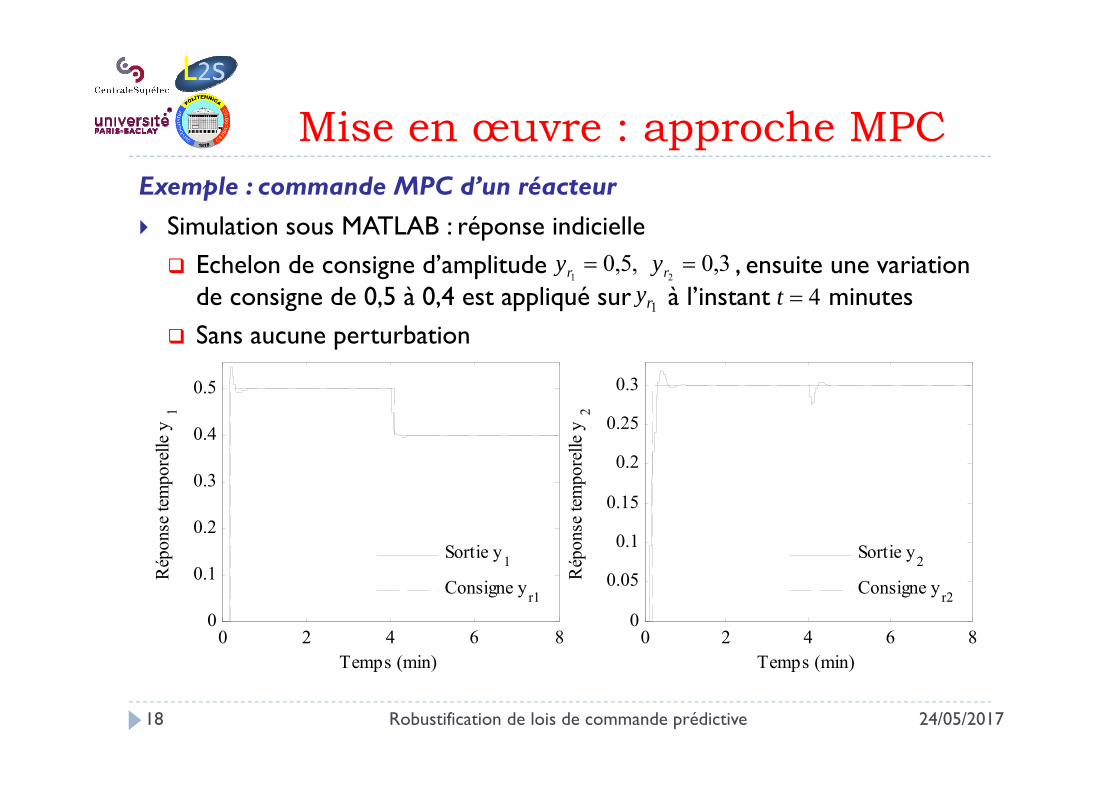
Mise en œuvre : approche MPC Exemple : commande MPC d’un réacteur Simulation sous MATLAB : réponse indicielle Echelon de consigne d’amplitude , ensuite une variation
de consigne de 0,5 à 0,4 est appliqué sur à l’instant minutes Sans aucune perturbation
18
0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
Temps (min)
Rép
onse
tem
pore
lle y
1
Sortie y1
Consigne yr1
0 2 4 6 80
0.05
0.1
0.15
0.2
0.25
0.3
Temps (min)
Rép
onse
tem
pore
lle y
2
Sortie y2
Consigne yr2
1ry 4t3,0,5,0
21 rr yy
24/05/2017Robustification de lois de commande prédictive
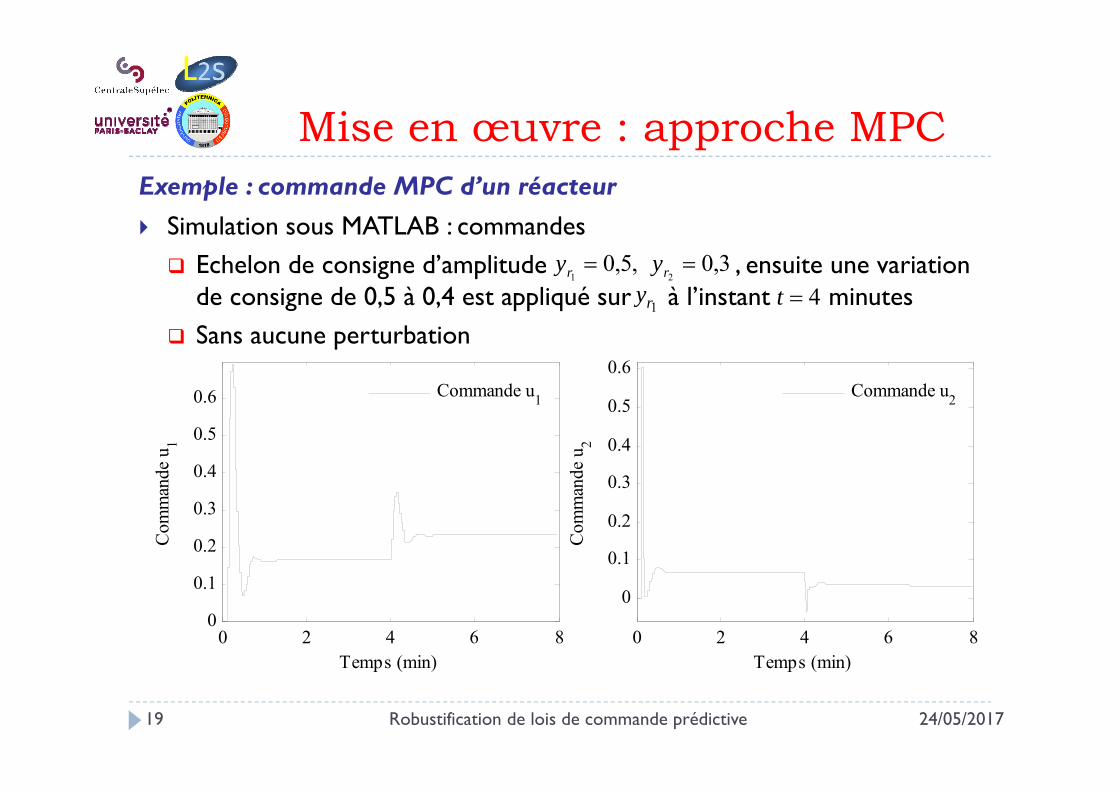
Mise en œuvre : approche MPC Exemple : commande MPC d’un réacteur Simulation sous MATLAB : commandes Echelon de consigne d’amplitude , ensuite une variation
de consigne de 0,5 à 0,4 est appliqué sur à l’instant minutes Sans aucune perturbation
19
0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
0.6
Temps (min)
Com
man
de u
1
Commande u1
0 2 4 6 8
0
0.1
0.2
0.3
0.4
0.5
0.6
Temps (min)
Com
man
de u
2
Commande u2
3,0,5,021 rr yy
1ry 4t
24/05/2017Robustification de lois de commande prédictive

Plan du cours
Introduction
Concepts de la commande prédictive
Mise en œuvre : approche MPC
Introduction sur les LMIs
Robustification via la parametrisation de Youla
Conclusion
Quelques références
20 24/05/2017Robustification de lois de commande prédictive
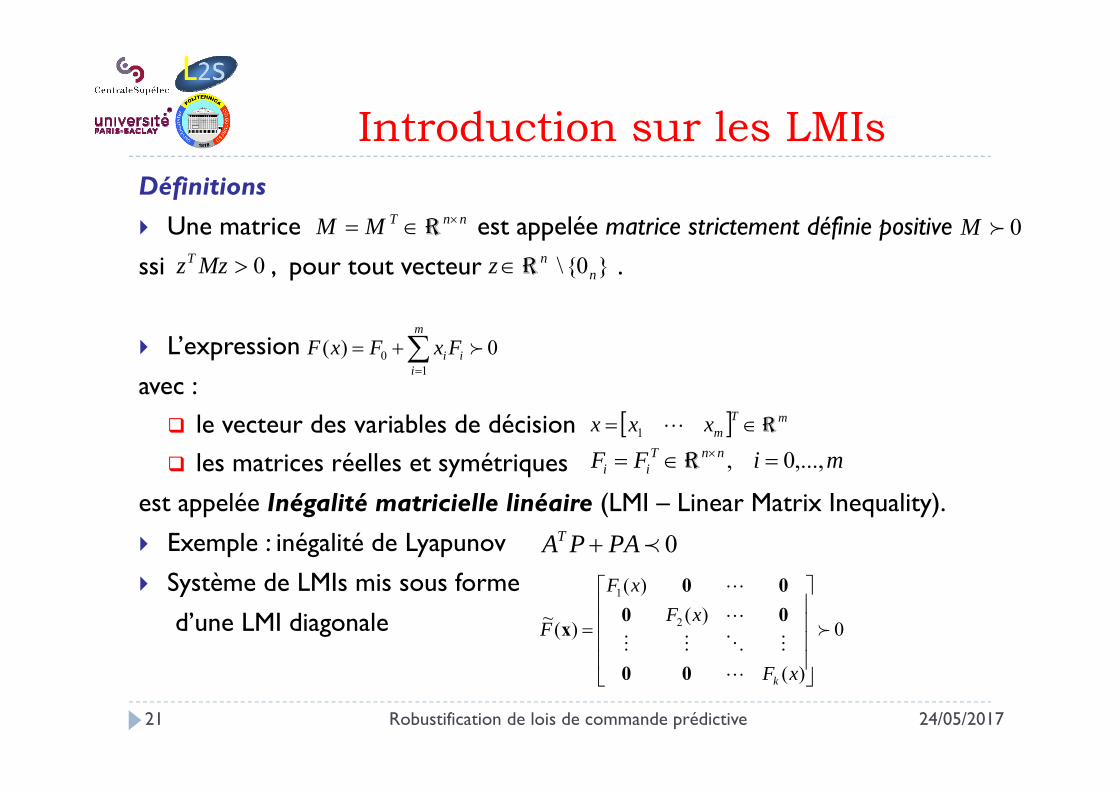
Introduction sur les LMIsDéfinitions Une matrice est appelée matrice strictement définie positivessi , pour tout vecteur .
L’expression
avec : le vecteur des variables de décision les matrices réelles et symétriques
est appelée Inégalité matricielle linéaire (LMI – Linear Matrix Inequality).
Exemple : inégalité de Lyapunov
Système de LMIs mis sous forme
d’une LMI diagonale
21 24/05/2017Robustification de lois de commande prédictive
0MnnTMM R
0MzzT }0{\ nnz R
0)(1
0
m
iiiFxFxF
mTmxxx R 1
miFF nnTii ,...,0, R
0PAPAT
0
)(
)()(
)(~ 2
1
xF
xFxF
F
k00
0000
x

Introduction sur les LMIsType de problèmes LMIs Problème de faisabilité : « Existe-t-il une solution t. q. le LMI
est faisable ?
Problème d’optimisation :
Lemme de Schur (complément de Schur)Soit et des fonctions affines en . Alors,
ssi et
Ssi et
22 24/05/2017Robustification de lois de commande prédictive
mx R 0)( xF
xcT
xF 0)(min
)()( xQxQ T )()( xRxR T x
0)()()()(
xRxSxSxQ
T
0)( xR 0)()()()( 1 xSxRxSxQ T
0)()()()( 1 xSxQxSxR T 0)( xQ
Plan du cours
Introduction Concepts de la commande prédictive Mise en œuvre : approche MPC Introduction sur les LMIs Robustification via la parametrisation de Youla
Mise sous forme retour d’état et observateur Calcule d’un paramètre de Youla
Robustesse en stabilité Performance nominale
Conclusion Quelques références
23 24/05/2017Robustification de lois de commande prédictive

Mise sous forme retour d’état et observateur
But : technique hors-ligne de robustification de lois MPC
Scenario : commande MPC initiale stabilisante (retour d’état + observateur) robustification via la parametrisation de Youla
)(ˆ)()( 2 kNkk err xLyFu
)(ky
0CBA)( 2Nkr y
)(ku
rF )(ku
)(ˆ ky
)(ˆ kexObservateur
0I
KBKCA eeeeC
L
n+m états
24 24/05/2017Robustification de lois de commande prédictive

QsK
Ensemble des correcteurs stabilisateurs :
Dépendance affine en Q
u y
Robustification via la paramètrisation de Youla
MIMO Système
0K
w z
yu
w z
Q
0T
TT
zw
zwzw
21
1211
yu
zwzwzwQTTTTzw 211211
0K sK HQ
spécifications convexes en B.F.
24/05/2017Robustification de lois de commande prédictive25

Solution sous optimale : polynôme ou filtre FIR pour chaque paire
avec
Représentation d’état
paire fixe
paire variable
HQ ?Q),( jiijQ
pjmiqqQQn
l
lijl
ij ,1,,1,0
degré du Q Paramètres inconnus
mpmjm
ipiji
pj
QQQ
QQQ
QQQ
1
1
1111
Q
)()()(
)()()1(
kkk
kkk
QQQ
QQQQ
yDxCu
yBxAx ),( QQ BA),( QQ DC
étatsQpn
24/05/2017Robustification de lois de commande prédictive26
Robustification via la paramètrisation de Youla

Choix du paramètre de Youla (stable !)
avec
24/05/2017Robustification de lois de commande prédictive27
Robustification via la paramètrisation de Youla
mpQ
mQ
mpQ
mQ
pQQ
pQQ
dd
dd
11
111111
cc
ccb0a0
0b0a
DCBA
ijijQ
ijn
ijijQ
nQ
nn
nQ qdqq
QQQQ
Q01
1,11,11
1,1 ,,1
,0
c0b0I
0a
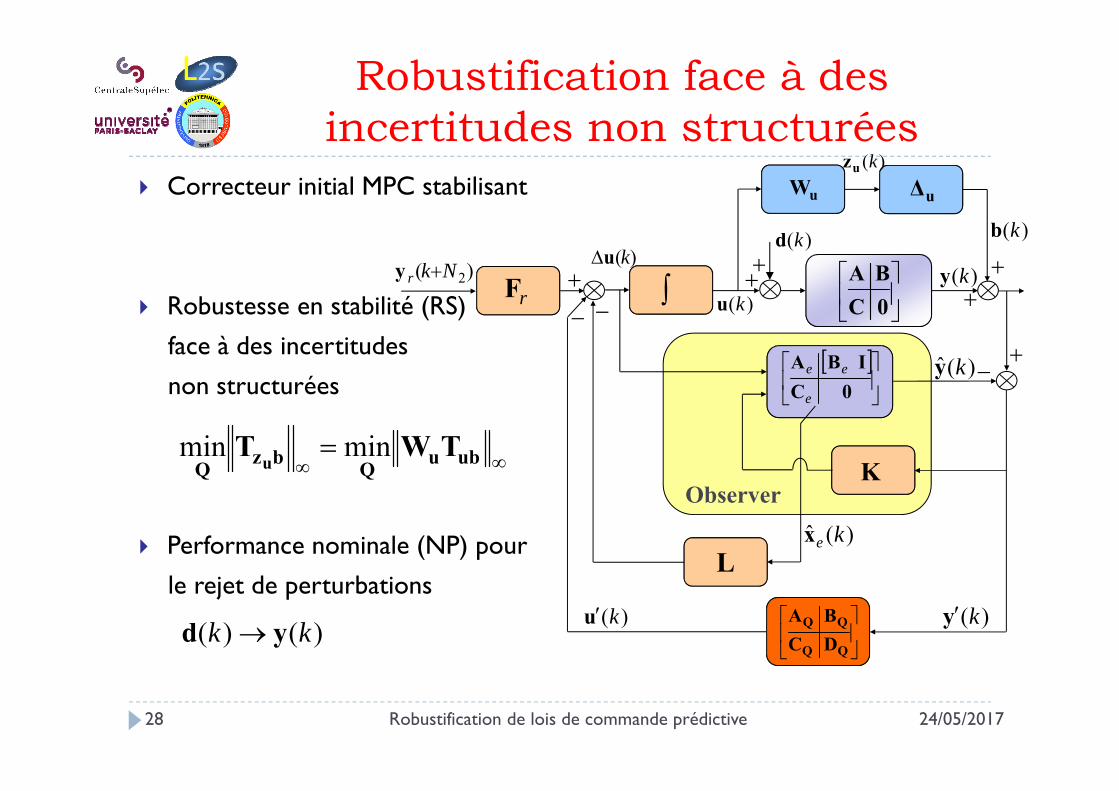
Correcteur initial MPC stabilisant
Robustesse en stabilité (RS)
face à des incertitudes
non structurées
Performance nominale (NP) pour
le rejet de perturbations
)()( kk yd
ubuQbzQ
TWTu
minmin
DCBA
)( 2Nkr y )(ky)(ku
rF )(ku
)(kd
)(kuz
uΔ
0CBA
)(kb
0C
IBA
e
ee )(ˆ ky
K
)(ˆ kexL
)(ky)(ku
uW
Observer
24/05/2017Robustification de lois de commande prédictive28
Robustification face à des incertitudes non structurées
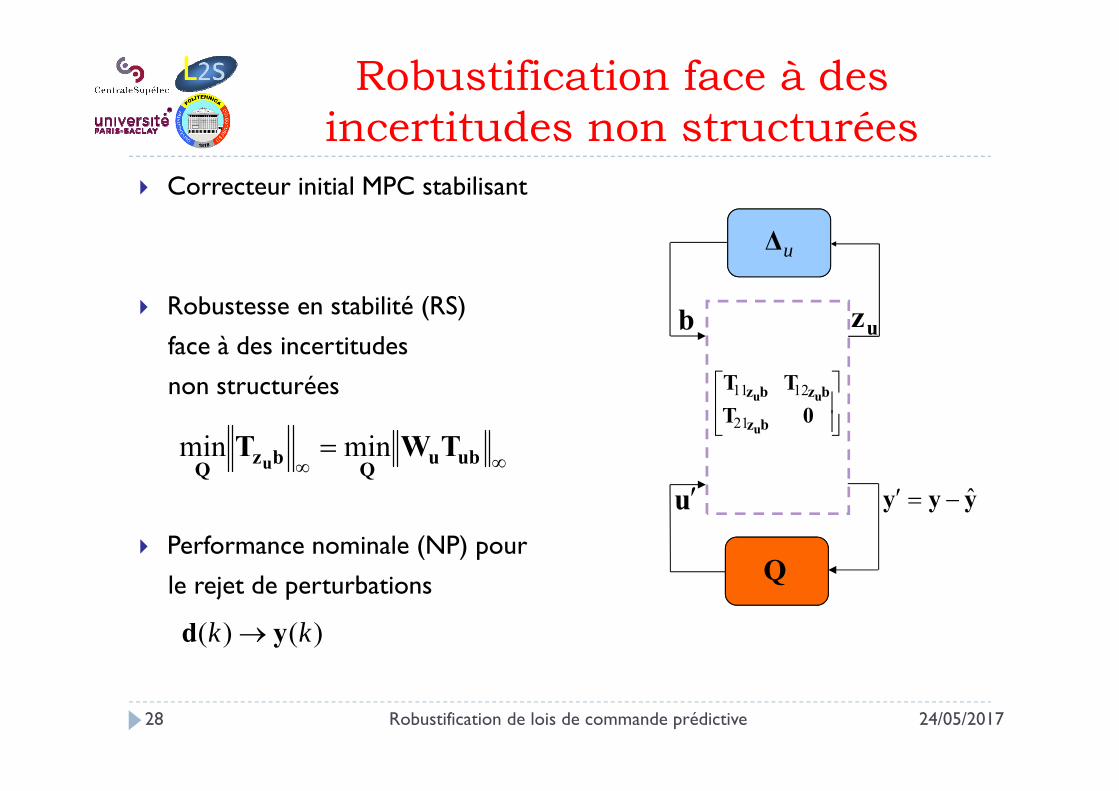
Correcteur initial MPC stabilisant
Robustesse en stabilité (RS)
face à des incertitudes
non structurées
Performance nominale (NP) pour
le rejet de perturbations
)()( kk yd
ubuQbzQ
TWTu
minmin
24/05/2017Robustification de lois de commande prédictive28
Robustification face à des incertitudes non structurées
b uz
Q
0T
TT
bz
bzbz
u
uu
21
1211
u
uΔ
yyy ˆ
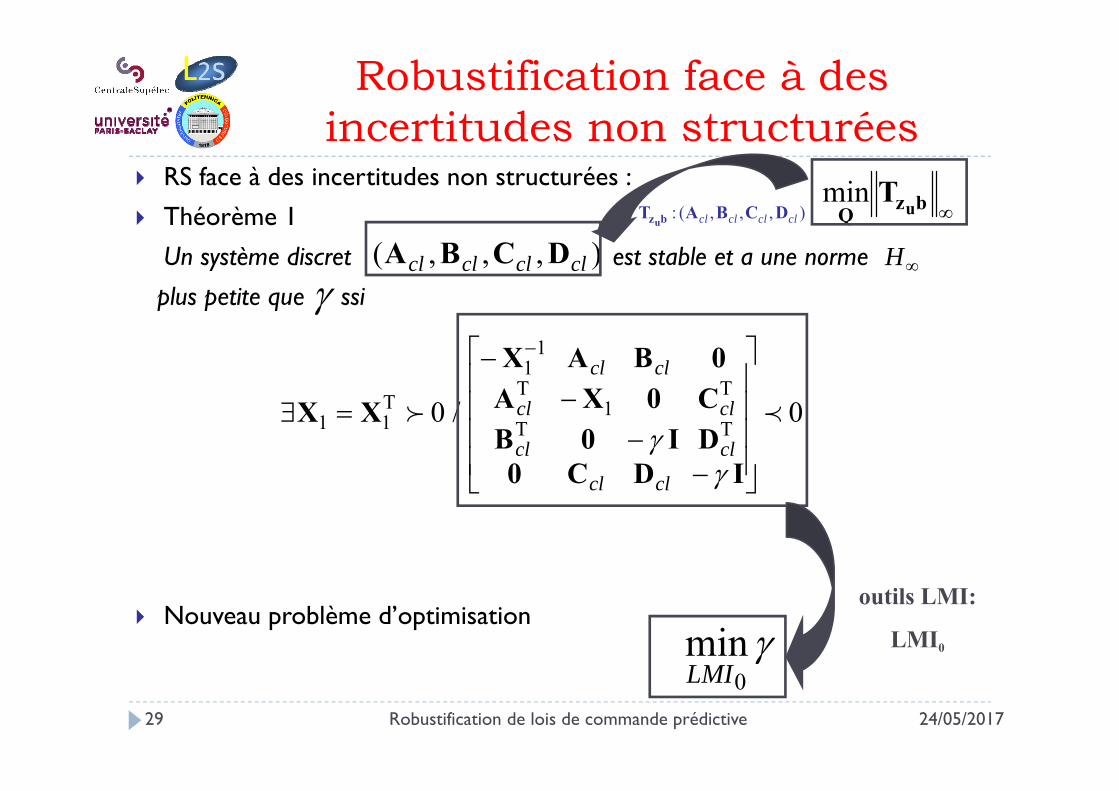
RS face à des incertitudes non structurées :
Théorème 1
Un système discret est stable et a une norme plus petite que ssi
Nouveau problème d’optimisation
),,,( clclclcl DCBA H
0/0TT
T1
T
11
T11
IDC0DI0BC0XA0BAX
XX
clcl
clcl
clcl
clcl
0
minLMI
outils LMI:
LMI0
bzQ uTmin
),,,(: clclclcl DCBAT bzu
24/05/2017Robustification de lois de commande prédictive29
Robustification face à des incertitudes non structurées

24/05/2017Robustification de lois de commande prédictive30
Robustification face à des incertitudes non structurées
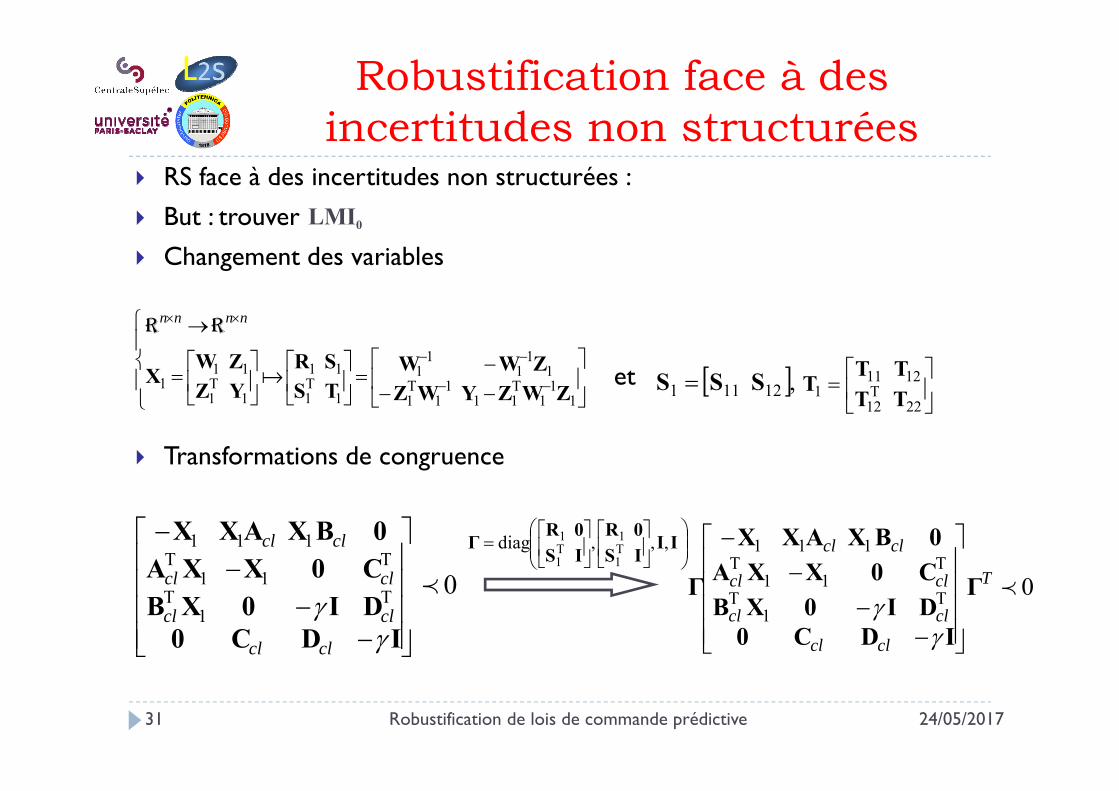
RS face à des incertitudes non structurées :
But : trouver
Théorème
QwQweQw
QQeQ
QuQueQu
clcl
clcl
DDCDCDDCCBACB0
K0A0DBCBCDBAA
DCBA
21
2
31 111
)()( kk uzb
0TT
T1
T
11
IDC0DI0BC0XA0BAX
clcl
clcl
clcl
clcl ),,,(diag 1 IIIXΠ 0T
TT
T1
T
11
Π
IDC0DI0BC0XA0BAX
Π
clcl
clcl
clcl
clcl
LMI0

24/05/2017Robustification de lois de commande prédictive30
Robustification face à des incertitudes non structurées
RS face à des incertitudes non structurées :
But : trouver
Théorème
QwQweQw
QQeQ
QuQueQu
clcl
clcl
DDCDCDDCCBACB0
K0A0DBCBCDBAA
DCBA
21
2
31 111
)()( kk uzb
0TT
T1
T
11
IDC0DI0BC0XA0BAX
clcl
clcl
clcl
clcl ),,,(diag 1 IIIXΠ
LMI0
0T1
T
T11
T111
IDC0DI0XBC0XXA0BXAXX
clcl
clcl
clcl
clcl
24/05/2017Robustification de lois de commande prédictive31
Robustification face à des incertitudes non structurées
RS face à des incertitudes non structurées :
But : trouver
Changement des variables
et
Transformations de congruence
11
1T11
11
T1
11
11
1
1T1
11
1T1
111 ZWZYWZ
ZWWTSSR
YZZW
X
nnnn RR
,12111 SSS
22T
12
12111 TT
TTT
0T1
T
T11
T111
IDC0DI0XBC0XXA0BXAXX
clcl
clcl
clcl
clcl
II
IS0R
IS0R
Γ ,,,diag T1
1T1
1
0T1
T
T11
T111
T
clcl
clcl
clcl
clcl
Γ
IDC0DI0XBC0XXA0BXAXX
Γ
LMI0

24/05/2017Robustification de lois de commande prédictive32
Robustification face à des incertitudes non structurées
RS face à des incertitudes non structurées :
But : trouver LMI0
0
*************
*********
*****
*
TT
TTT1
T1222
TT2
T1
T111211
T111
22T
1222222T
1222
121112122111211
121112121312211111111 111
IDDI
DCCS0TDDCCCS0TT
CR000R0BTKTATCBTAT0T0BTKTATCBTAT0TT0BSKSDBCBASSACDBACBSASSARA00R
wQ
wQ
wTQ
Te
QQeQ
QQeQ
QQuQuQeQueQ
LMI0

NP : gabarits temporels de sortie pour le rejet des perturbations
Nouveau problème d’optimisation
tNkkkkk 0/),()()( maxmin yyy
Time
Gabarit temporel pour le rejet de perturbation
Tim
e re
spon
se
10 ,
minLMILMI
outils LMI: LMI1
24/05/2017Robustification de lois de commande prédictive33
Robustification face à des incertitudes non structurées

24/05/2017Robustification de lois de commande prédictive34
Robustification face à des incertitudes non structurées
NP : gabarits temporels de sortie pour le rejet des perturbations
But : trouver
Pour
LMI1
yQu
ud
0TTT
yy
yd
ydyd
21
1211
tNkkkk ,0),()()( 211211 dQTTdTyydydyd
p
l
m
h
jl
hlih
jii ksQsksky
1 1,2,1
,0 )()()(
Qn
v
vjiv
ji qqQ1
p
l
m
hhln
hl
hl
Qtjilht
jilht
jilh
jilh
jilh
jilh
tji
ji
ji
ti
i
i
nNsNsNs
sss
Ns
ss
Ny
yy
1 1
1
0
,,
,,
,,
,,
,,
,,
,0
,0
,0
)()1()(
0)0()1(00)0(
)(
)1()0(
)(
)1()0(
tNk ,...,1

24/05/2017Robustification de lois de commande prédictive35
Robustification face à des incertitudes non structurées
NP : gabarits temporels de sortie pour le rejet des perturbations
But : trouver
Etapes
Gabarit maximal
Gabarit minimal
LMI1
p
l
m
h
ThlQ
jilh
hlQ
jilh
jip
l
m
hThl
Q
hlQji
lhjilh
jii d
d
1 1
,,
,,
,0
1 1
,,
,,
,0 )(
)(csss
csssy
CDCD
Th
TQ
m
h
jiph
jih
Th
TQ
m
h
jiph
jih
jii ee CssDsssy
CCDD
1
,,
,1,
1
,,
,1,
,0
0max,1
,
1
,,0
i
Th
TQ
m
h
jih
Th
TQ
m
h
jih
ji ee yCSDSsCD
0min,1
,
1
,,0
i
Th
TQ
m
h
jih
Th
TQ
m
h
jih
ji ee yCSDSsCD
LMI1

Application à un réacteur Paramètres de réglage du MPC initial
Pondérations
ww
ww
DCBA
pJmJ
u
ii
NNN
IQIR
)(~,05.0)(~2,3,1 21
3.0/)7.01( 12
qIWu2wn
24/05/2017Robustification de lois de commande prédictive36
1y
2u
2y
1u
Robustification face à des incertitudes non structurées
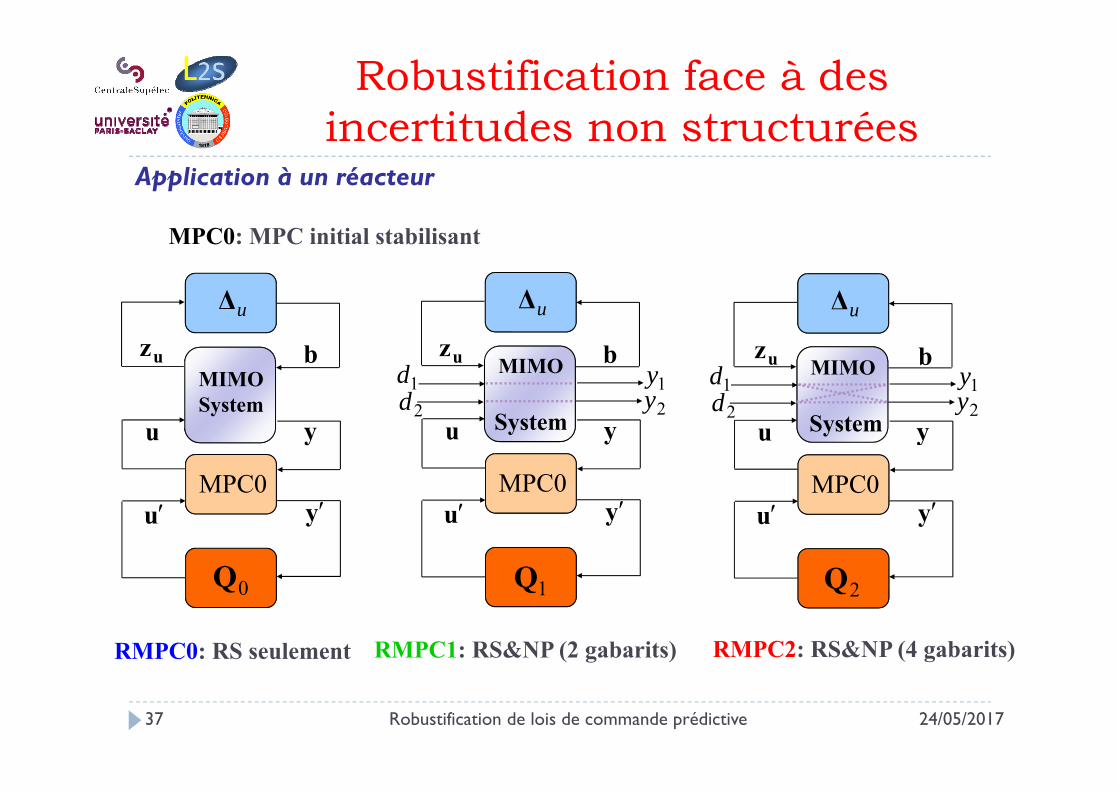
Application à un réacteur
RMPC0: RS seulement
MIMO System
0Q
yu0MPC
yu
uΔ
buz buz
RMPC1: RS&NP (2 gabarits)
Système MIMOMIMO
System
1Q
yu0MPC
1d 1y
yu
uΔ
2d 2y
buz
RMPC2: RS&NP (4 gabarits)
2Q
yu
MIMO
System
0MPC
yu
uΔ
1d 1y2d 2y
MPC0: MPC initial stabilisant
24/05/2017Robustification de lois de commande prédictive37
Robustification face à des incertitudes non structurées

Application à un réacteur Ordre du paramètre de Youla :
Décroitre la norme H du Tubaugmente la RS vis-à-vis
des incertitudes additives
Ajouter des gabarits temporels pourla NP diminue la RS
compromis
40Qn
Singular values of ubT
10-1 100 101 102
-40
-20
0
20
Frequency (rad/min)
Sing
ular
val
ues
(dB
)
MPC0
RMPC0
RMPC1RMPC2
24/05/2017Robustification de lois de commande prédictive38
Robustification face à des incertitudes non structurées
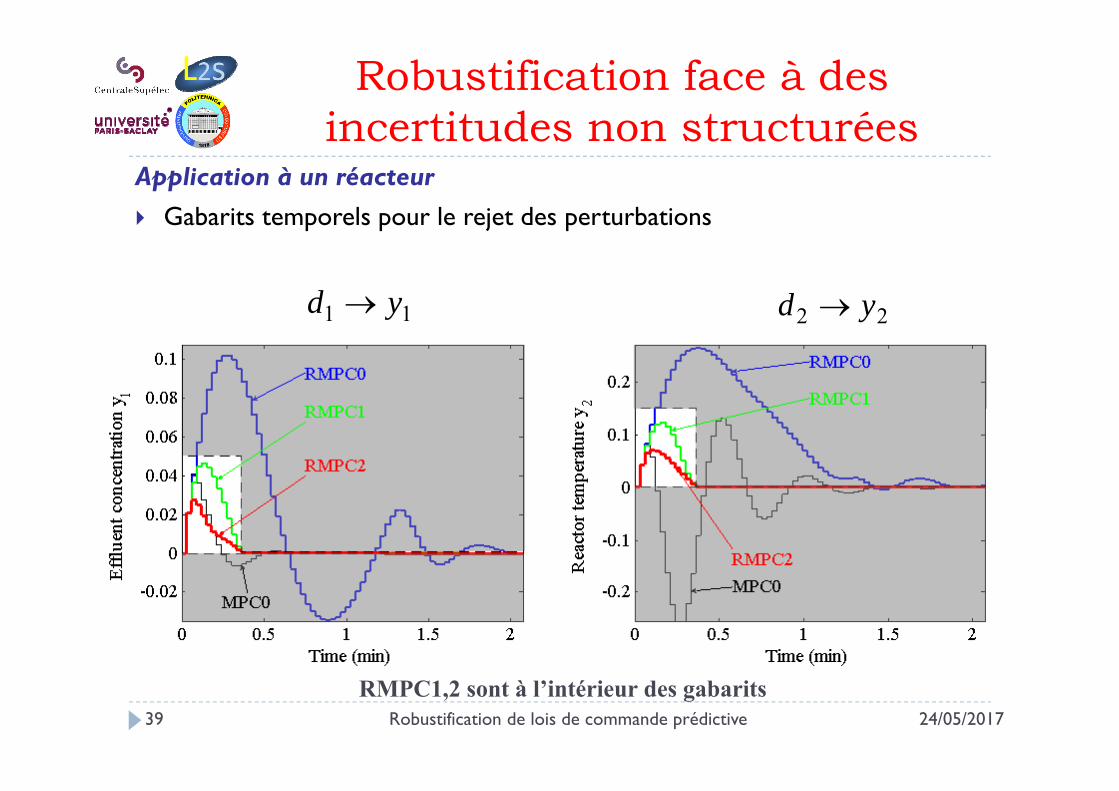
Application à un réacteur Gabarits temporels pour le rejet des perturbations
RMPC1,2 sont à l’intérieur des gabarits
11 yd 22 yd
24/05/2017Robustification de lois de commande prédictive39
Robustification face à des incertitudes non structurées

Application à un réacteur Gabarits temporels pour le rejet des perturbations
Seul RMPC2 reste à l’intérieur réduire l’influence du couplage
12 yd 21 yd
24/05/2017Robustification de lois de commande prédictive40
Robustification face à des incertitudes non structurées
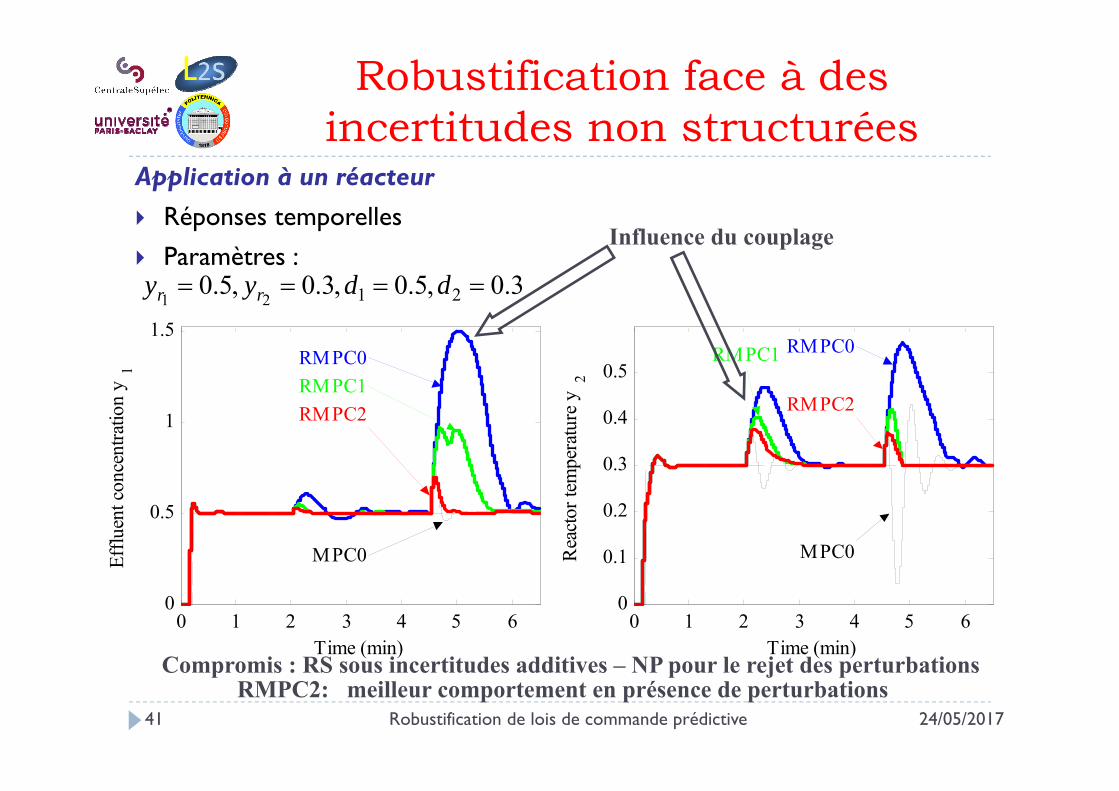
Application à un réacteur Réponses temporelles
Paramètres :3.0,5.0,3.0,5.0 2121
ddyy rr
0 1 2 3 4 5 60
0.5
1
1.5
Time (min)
Efflu
ent c
once
ntra
tion
y1
MPC0
RMPC0RMPC1RMPC2
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
Time (min)
Rea
ctor
tem
pera
ture
y2
MPC0
RMPC0RMPC1
RMPC2
Influence du couplage
Compromis : RS sous incertitudes additives – NP pour le rejet des perturbationsRMPC2: meilleur comportement en présence de perturbations
24/05/2017Robustification de lois de commande prédictive41
Robustification face à des incertitudes non structurées

0 2 4 6
-0.2
0
0.2
0.4
0.6
Time (min)
Coo
lant
flow
u2
MPC0
RMPC0
RMPC1
RMPC2
0 2 4 6
-1.5
-1
-0.5
0
0.5
1
Time (min)
Feed
flow
rate
u1
MPC0
RMPC0
RMPC1
RMPC2
Influence du couplage
Application à un réacteur Commandes
24/05/2017Robustification de lois de commande prédictive42
Robustification face à des incertitudes non structurées
Compromis : RS sous incertitudes additives – NP pour le rejet des perturbationsRMPC2: meilleur comportement en présence de perturbations

Application à un réacteur Validation du RS face à une dynamique négligée de , i.e.
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
Time (min)
Efflu
ent c
once
ntra
tion
y1
MPC0RMPC2Setpoint yr1
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
Time (min)
Rea
ctor
tem
pera
ture
y2
MPC0RMPC2Setpoint yr2
)]07.01)(7.01/[(111
ssuy T
1u
RMPC2 – stable face à cette incertitude
Influence du couplage
24/05/2017Robustification de lois de commande prédictive43
Robustification face à des incertitudes non structurées

Application à un réacteur Réduction de l’ordre du paramètre de Youla
états états
Réponses fréquentielles bien approximées
Singular values of ubTYoula parameter
240 6
10-1 100 101 102
0
10
20
30
Frequency (rad/min)
Sing
ular
val
ues
(dB
)
RMPC2RMPC2r
10-1 100 101 102-15
-10
-5
0
5
10
15
Frequency (rad/min)
Sing
ular
val
ues
(dB
)
RMPC2
RMPC2r
24/05/2017Robustification de lois de commande prédictive44
Robustification face à des incertitudes non structurées

Application à un réacteur Réponses temporelles avec le paramètre de Youla réduit
0 1 2 3 4 5 60
0.2
0.4
0.6
Time (min)
Efflu
ent c
once
ntra
tion
y1
RMPC2RMPC2rSetpoint yr1
0 1 2 3 4 5 60
0.1
0.2
0.3
Time (min)
Rea
ctor
tem
pera
ture
y2
RMPC2RMPC2rSetpoint yr2
24/05/2017Robustification de lois de commande prédictive45
Robustification face à des incertitudes non structurées
Réponses temporelles bien approximées

Plan du cours
Introduction
Concepts de la commande prédictive
Mise en œuvre : approche MPC
Introduction sur les LMIs
Robustification via la parametrisation de Youla
Conclusion
Quelques références
48 24/05/2017Robustification de lois de commande prédictive

Conclusion Commande prédictive : beaucoup utilisée dans l’industrie
Etapes à suivre en vue de l’élaboration d’un commande prédictive (modèle,trajectoire, critère quadratique, séquence de commande)
Application possible à plusieurs classes de systèmes (SISO, MIMO, systèmes avec contraintes)
Approche d’état (MPC) Commande par retour d’état
Robustification Mise sous forme d’un retour d’état + un observateur Trouver un paramètre deYoula stable qui permet de robustifier
RS par rapport aux incertitudes non structurées NP par rapport au rejet des perturbations
Atout MPC : prise en compte des contraintes directement dans la synthèse
Conclusion
49 24/05/2017Robustification de lois de commande prédictive
Plan du cours
Introduction
Concepts de la commande prédictive
Mise en œuvre : approche MPC
Introduction sur les LMIs
Robustification via la parametrisation de Youla
Conclusion
Quelques références
50 24/05/2017Robustification de lois de commande prédictive

P. Boucher, D. Dumur, “La commande prédictive”, Collection Méthodes et pratiquesde l’ingénieur, Editions Technip, Paris, 1996.
E.F. Camacho, C. Bordons, “Model predictive control”, Ed. Springer-Verlag, 2nd ed.,London, 2004.
J. M. Maciejowski, “Predictive control with constraints”, Ed. Prentice Hall, PearsonEducation Limited, Harlow, 2002.
J.A. Rossiter, “Model based predictive control. A practical approach”, CRC Press LLC,2003.
S. Boyd, L. El Ghaoui, E. Fero, V. Balakrishnan, “Linear matrix inequalities in system andcontrol theory”, SIAM Publications, Philadelphia, 1994.
C.W. Scherer, S.Weiland,“Linear matrix inequalities in control”, Notes de cours, 2005.
D. Henrion, “Course on LMI optimization with application in control”, Notes de cours,2008.
C. Stoica, “Robustification de lois de commande prédictive multivariables”, thèse dedoctorat, Université Paris XI, Orsay, 2008.
Quelques références
51 24/05/2017Robustification de lois de commande prédictive