robotics introduction-chapter 1
TRANSCRIPT

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 1/98
Introduction to Robotics
8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 2/98
• Robotics is the stud of the desi n
construction and use of robots.
• Artificial intelligence is the branch of
computer science that deals with writingcompu er programs a can so ve pro emscreatively; "workers in AI hope to imitate or
”

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 3/98
The term robot derives from the Czech word
robota, meaning forced work or compulsoryservice.
fictional 1920s play called Rossum’s
Universal RobotsUniversal Robots Capek.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 4/98
Terms and definitions
Definition: “What is a robot?”
• ,
• a reprogrammable, multifunctional handling tool for
manipulating objects along any paths for a number of
tasks.
• a machine that can move itself and / or objects in space

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 5/98
The Robotics Institute of America [RIA]
"A reprogrammable, multifunctional manipulator designed to
move material, parts, tools, or specialized devices through
various ro rammed motions for the erformance of a variet of
tasks”
T e Br t s Ro ot Assoc at on BRA
"A reprogrammable device with a minimum of four de ree of freedom desi ned to bothmanipulate and transport parts. Tools orspecialized manufacturing implements through
var a e programme mot ons or per ormance othe specific manufacturing task.”

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 6/98
Computer Aided Manufacturers International [CAM‐I]
“A device that performs as functions ordinary ascribed to
human
being
or
operates
with
what
appear
to
be
almost
human intelligence.”
Industrial robots are universal, automatic motion devices with
[DIN]
severa axes w ose mot ons are ree y programma e n terms
of sequence of motions, paths and angles, and which may be
sensor‐controlled.
They may be equipped with grippers, tools, or other
production devices (generally referred to as effectors)
tasks.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 7/98
Law Zero -A robot may not injure humanity, or,,
harm. First Law- A robot may not injure a human being,
or, through inaction, allow a human being tocome to harm.
Second Law-Second Law- by human beings, except where such orderswould conflict with the First Law.
Third Law- A robot must protect its ownexistence as long as such protection does notconflict with the First or Second Law.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 8/98
• e eve opmen o e curren n us r a ro o s no s ar e ore e m -20th century.• In 1946, the American G. C. Devol developed a controlling device that wasca able of recordin electrical si nals on ma netic media. These could beplayed back in order to control a mechanical device.• The development of remote-controlled devices (manipulators) for handling
radioactive materials started in 1951.
1952. The related programming language, APT, was published in 1961.• In 1954, C. W. Kenward from the U.K. filed a patent application for a robotdevelopment. At the same time, the American George C. Devol was working on
the “programmed article transfer”.It was rewarded with a US patent in 1961.• The first commercial robot was presented by Planet Corp. in 1959. It wascontrolled mechanically by cam
.• The first industrial robot (“Unimate”) was introduced in 1960. It was based onDevol’s research work. This robot had a hydraulic drive. It was controlled by a
computer that used the principles of numerically-controlled machine tools.• In 1961, a robot of the Unimation type was installed in the Ford MotorCompany.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 9/98
• A mobile robot (“Shakey”) was developed at the Stanford Research Institute(SRI) in 1968. It was equipped with a number of sensors, such as a camera, touchsensors, etc.• The first robot programming language (WAVE) was developed at the SRI in
1973. It was succeeded by the AL language in 1974. Some elements of thislan ua e were used later on in Unimation’s VAL ro rammin lan ua e. Around the same time, the first robots with fully electric drives emerged.• The PUMA robot (programmable universal machine for assembly) wasintroduced by Unimation in 1978. It had an electric drive and was based on draftsrom enera o ors.
• The SCARA type of robot (Selective Compliance Arm for Robotic Assembly) wasinvented on 1979 at yamanashi University in Japan for assembly.• In 1981, A “direct-drive robot develo ed at Carne ie-Mellon Universit . It usedelectric motors• In 1982, IBM introduces the RS-1 robot assembly.• In 1984, several offline systems developed at the robots 8 show.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 10/98
Robots can be programmed to perform a particular task .
Robots is not limited to one set of motions i.e it is reprogrammable, thismeans when a specific operation is no longer needed, the robot can be
moved to a different operation and programmed for it.
Robot is multifunctional i.e different tasks can be carried out. Eg. The robot might move workpiece to a m/c and load in into the machine,then insert a cutting tool and control the cutting of the workpiece. Finally unload
the piece and store it in an appropriate area.
Robot providing increasing productivity, and they take over the hazardous,tedious tasks that people have had to perform.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 11/98
Human Robot
The human will remain superiorsin arts, music, medicine and
Robots are well suited to avariety of tasks, particular those
o er en eavors a canno e
expressed in purelymathematical terms.
as s a are repe ve.
senses of sight, smell, hearingand touch.
tasks that are artistic or creative
The combination of these senses Sensor ca acities of robots gives human capability of processing large amount of information simultaneously.
continue to improve astechnology improves.
Human brain is able to makedecisions on experiences andstored information.
Although robot computer canstore quanties of information, itcan can’t make decisions based
make intuitive judgments based
on stored information and pastexperiences

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 12/98
Robots are used for the following reasons:
Repetitive tasks that robots can do 24/7.
Robots never get sick or need time off.
Robots can do tasks considered too dangerous for humans.
Robots can operate equipment to much precision than humans.
May be able to perform tasks that are impossible for humans
Dirty Tasks
Robots are also used for the following tasks:
Repetitive tasks

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 13/98
Flexibility
High productivity
Better quality and products
Im roved ualit of human life b erformin the undesirable obs.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 14/98
n an env ronmen a s azar ous or umans o opera e
in or in a environments where human being are hazardous
to the roduct clean rooms
Industrial robots for tasks that are repetitive(assembly of automobiles, electronic goods)
In manufacture of consumer products in small and varying
batch sizeser app ca ons suc as en er a nmen , oys og o
from sony), Humanoid robot P3 and Asimo from Honda for
advertisin Da Vinci for brain and heart sur eries
For every day home applications

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 15/98
Loading and unloading
Spot welding Spray painting
Arc welding Inspection
Die casting and forging operations. Machining (Lathe, milling , drilling etc)
Non- Industrial applications
Shearing wool from sheep Medicine Education
nterta nment Research Etc.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 16/98
1st Generation: (programmable manipulators, 1960 - 1975)Small computing power, only fixed halts (point-to-point programming with Teach-
Box), hardly any sensor support (therefore only pick-and-place activities)
2nd Generation: (adaptive robots, 1976-1982)More sensors (e.g. cameras), more ”disorder” allowed in work environments,own programming languages (e.g. VAL), implicit programming (the robot wasthe object to be programmed, not the task), low robot intelligence (adaptiveperformance of tasks)
High computing power (multi-processor systems), task-oriented programming,call for (machine) autonomy

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 17/98
Types
Fixed robots ‐ Industrial robots used for tending a machine or other operations
Mobile robots ‐ Wheeled, Legged, Tracked, Flying, Hybrid, etc
Classification• Structure & Works ace ‐ Cartesian C lindrical Polar S herical
Articulated, SCARA, Humanoids, Parallel platforms, etc
• Kinematic chain‐ Open and Closed
• Arrangement of drives ‐ Serial and Parallel• ontro system – Ve oc ty, Force, Hy r
• Trajectory Control ‐ Point To Point & Continuous Path
• Operation – Tele‐operated, Autonomous
‐ , , , , , Medicine, Marine, Personal, Land and Surface, Submersible, Educational, Research, etc

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 18/98
Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 19/98
Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 20/98
Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 21/98
Fixed robots (Manipulators)
Mobile robots
Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 22/98
Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 23/98
Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 24/98
Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 25/98
Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 26/98
Structured environments can be identified and modeled easily It is
easy o wor n ruc ure env ronmen s

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 27/98
n a vance materia ‐ an ing or conveying system t at invo ves
a driverless vehicle which follows a guide path and is controlled by an off ‐board computer or microprocessor
• Guided by an
electrical wire
installed
in
the
floor
• It can also leave the
wire to avoid

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 28/98
BR
700http://www.kaercher.de
Its navigation system comprises of a sophisticated sonar system and a gyro

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 29/98
• Used for underwater archaeology in deep‐sea research
• v u u v u
operator
• Teleo erated

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 30/98
gripper or on board camera sophisticated navigation
SRIhttp://www. activmedia.com/robots

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 31/98
Used to explore the

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 32/98
http://diwww.epfl.ch/lami/robots/K‐family/
• Small mobile robot ‐ 60 mm dia
• Modules with grippers, cameras, etc

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 33/98
• F rst n ustr a wa ng ro ot• Designed for moving wood
•
• Navigation
controlled
by
a
human
operator
http://www.plustech.fi/

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 34/98
Inspection and repair of sewage
Fully teleoperated
p p gtubeVentilation inspection
Fully teleoperated
Air duct inspection robot
A pan‐tilt camera with zoom and sensors for
automatic
inclination
control,
wall following, and intersection detection
(http://asl.epfl.ch). © Sedirep / EPFL.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 35/98
•
mission to explore the
Mars in 1997
• Teleoperated from earth
• Obstacle detection assisted
by on board sensors
. . . . _ .

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 36/98
8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 37/98
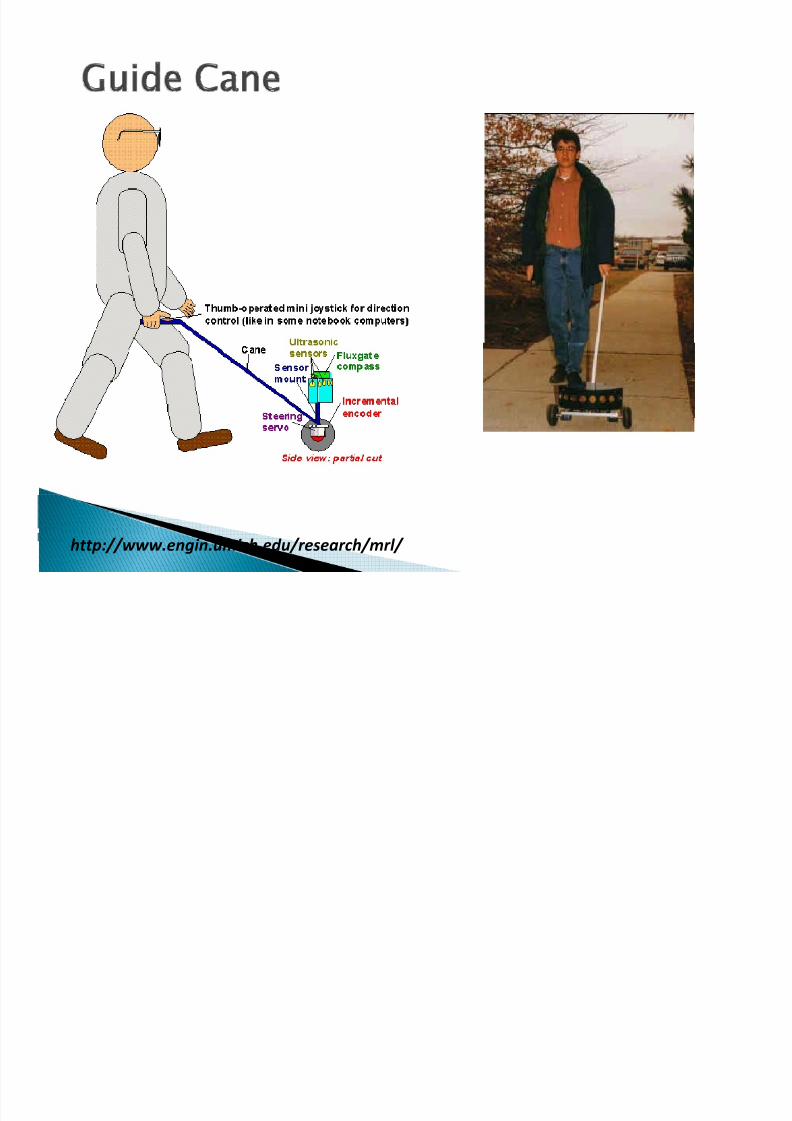
http://www.engin.umich.edu/research/mrl/

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 38/98
Also used in Volcanic eru tions
NOMAD - Carnegie Mellon / NASAhttp://img.arc.nasa.gov/Nomad

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 39/98
• Size: 25 cm length
• Sensors
Color camera
Stereo microphone
Aibo from Sony

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 40/98
Cye
Dyson

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 41/98
Two‐wheeled differential drive robot
Controlled by a remote PC

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 42/98
interact and present exhibitions
EPFL @ expo.02

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 43/98
P2 from Honda, Japan
Max Speed: 2 km/h
Weight : 210 kg
Height : 1.82 m
Leg DOF : 2*6
AMI & AMIETAMI & AMIETP2 from Honda, Japan
Arm DOF : 2*7

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 44/98
Communication modes ‐
facial, oral, gesture, emotional

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 45/98
TV Programs
KBS ‐ Quiz
Daehannminguk,
2003

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 46/98
industrial productionprocesses. For thisreason, it is referred toas an ”industrial robot”.
Industrial robots aredesigned for high
flexibility.
An industrial robot is not a human being but rather a machine. It does notthink, it just acts. Only its mechanics resemble that of a human arm.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 47/98
Industrial robots work together with machine tools, automatic
systems. For this purpose, they need devices that supplyand identify the workpieces - andremove an s ore em a er process ng, e c. ur ermore,
machining tools and grippers on the robots have to beexchanged. These devices tailor-made for industrial robotsare called peripherals. The peripherals areextremely important for the performance, cost and
. ,an industrial robot becomes a ”robot station” for practicaluse.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 48/98
The Manipulator or the arm (The“mechanical unit”
One or more sensors
A controller (the “brain”)
A power supply

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 49/98
Elements
• an pu a or- mov ng mec an ca s ruc ure• Drives – actuates the joints of manipulator
• Computer – Controller and storer of taskprograms
• End effectors – Gripper, Tool, Camera, etc
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 50/98
”Industrial robots are universal, automatic motion devices with several
axes whose motions are freely programmable in terms of sequence ofmotions, paths and angles, and which may be sensor-controlled. They
, ,capable of performing handling and / or production tasks”.
In practice, industrial robots are made of mechanical, electronic, as wellas open- and closed-loop control elements. Industrial robots haveemerged from numerically controlled machine tools. Their different type ofconstruction mainly serves for free motion in space. The motion
se uences have been ro rammed and are erformed automaticall i.e. in the fields of:• handling of tools,e.g. spot welding, painting, burr removal, grinding
• an ng o wor p eces,
e.g. loading and unloading of machine tools, assembly, palletizing, andpackaging
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 51/98
Mechanics
The mechanical construction of an industrial robot has been derived froma human arm with hands and fingers. Therefore, it is referred to as a
”robot arm”. The imitated hands and fingers are called the ”gripper”. A
tool (e.g. paint sprayer, welding gun, etc.) may be fitted instead of thegripper.
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 52/98
The industrial Robot is a programmable Mechanical manipulator capable
o mov ng a ong severa rec ons equ ppe a s en w a wor ev ce
called the end effector (or tool) and capable of performing factory workordinarily done by human being.
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 53/98

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 54/98
Many similarities between a robotic system and a humanmanipulator system have both advantages and
sa vantages.
Robot anatomy concerned with the physical construction ofthe bod arm and wrist. Most robots used in the plants are mounted on a basewhich is fastened to the floor, assembly is attached to the
.components to allow variety of positions. The body, arm and wrist assembly is known as Manipulator. e en e ectors s not cons ere as part o ro otanatomy. The arm and body joints of the manipulator areused to osition the end effector.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 55/98
Mani ulator
Mechanical skeleton serves as a rigid structuralframework to support the arm.
e arm move oo s roug var ous mo ons so
that perform the operations required.Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 56/98
Actuators
Like human body requires muscles, the robot arm requires actuators to movethe mani ulator.
The actuator are the devices that exerts force to drive the manipulator into apredetermined position or series of position and hold the joints rigidly once the
.
There are two types of actuators 1) Angular 2) linear.
The actuators use i) Electric power ii) Hydraulic power iii) Pneumatic power
D t

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 57/98
Dc motor
Hydraulic motor
Pneumatic cylinder
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 58/98
Grippers and Other End effector
•Gripper is similar to the human hand, i.e hand.
•The shape of the gripper is determined by the.
•Two pronged gripper are used to pick-up
ob ects.
•Three pronged gripper are used to onspherical objects
•Specialized grippers can be designed forunique tasks.
Copyright © 2007 David Vernon (www.vernon.eu)

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 59/98
The control unit is like human brain which coordinates the muscles of the body.
It track of time , the position of the joints and movements of the manipulator.
It does this in accordance with a list of instructions. The instructions are stored.
Unlike the human being, the CU is incapable of the creative thinking required
for adaptive behavior.
Bosch Rexroth Manual
8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 60/98
Power Supply
As the digestive system converts food into usable energy, the robot power supply
function.
Eg – if the actuators are hydraulic and work place uses electric power available,then power supply must convert electric energy into hydraulic energy ie drivinghydraulic pump with an electric motor.
Data Distibution System
In the human body, the neurons receives message from the brain and passthese message on to the muscles.
In the same way, the data distribution system receives message from CU and.
This process takes through I/O ports or interfaces. These interfaces areneeded because the CU runs on with very low voltage and current. Theactuators current and voltage that would not destroy the CU.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 61/98
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 62/98
8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 63/98
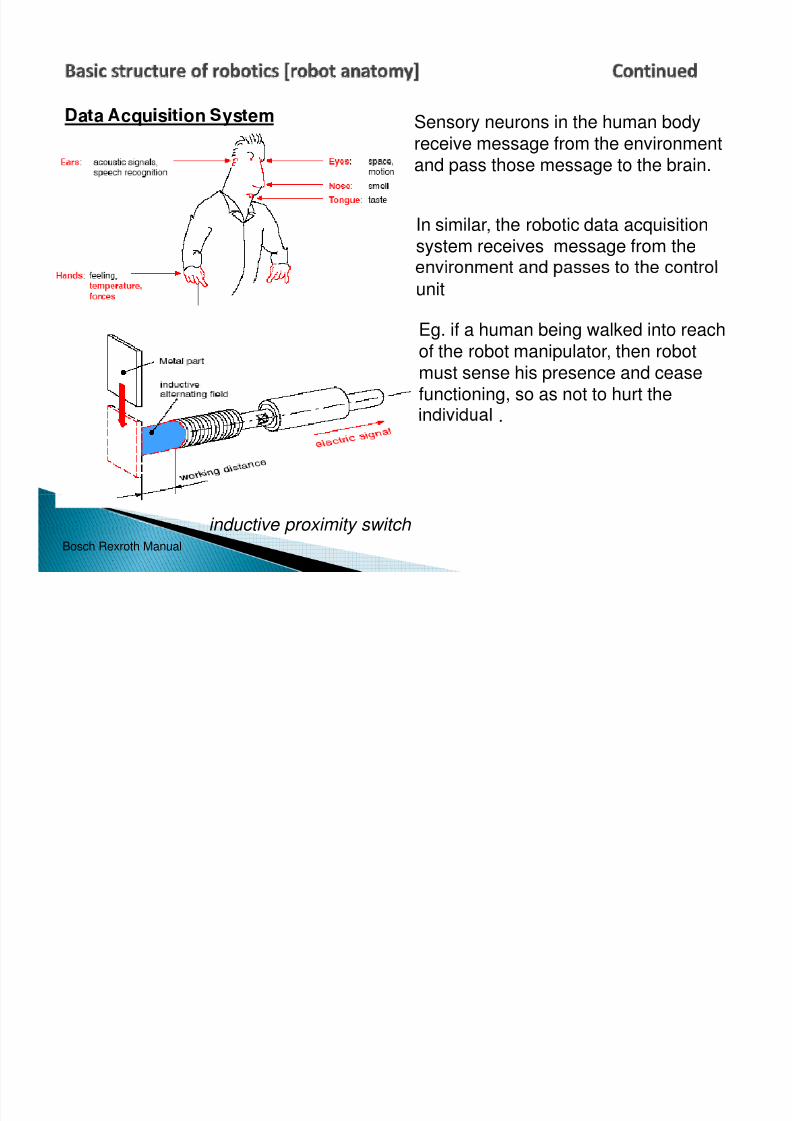
a a cqu s on ys em Sensory neurons in the human bodyreceive message from the environmentand pass those message to the brain.
In similar, the robotic data acquisitionsystem receives message from the
unit
Eg. if a human being walked into reachof the robot manipulator, then robotmust sense his presence and ceasefunctioning, so as not to hurt the
.
Bosch Rexroth Manual
inductive proximity switch

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 64/98
ay oa
The Maximum load that the manipulator can handle effectively is the payload.
The payload depends on strength of the arm. Eg for high-weight payload, the
actuators and mechanical structures must be stronger.
the rate of acceleration and deceleration required.
Speed
The speed is the rate the gripper moves, this is measured in mm/sec.
Heavy payloads must be moved at lower speeds and lighter payloads may be
moved at higher speed.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 65/98
epea a y an ccuracy
The ability of the robot to return its manipulator to a particular specified point isre eatabilit or accurac .
This is measurement is determined while the robot is repeating a cycle.
.
Teach Pendent
,angles of the axes and paths of motion of the gripper for each process.While doing so, use of elaborate mathematical formulae.
By using teach pendent, it is a remote control box that allows the operator tomanually move the end effector or gripper. The control unit is in passive
monitoring mode is stores those movements in the memory of CU.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 66/98
Robot Configurations
Robots possess following configurations. Cartesian coordinate confi uration (Three liner axes) Polar coordinate configuration (Two linear and one rotary axis)
Cylindrical/spherical coordinate configuration (Two linear and one rotaryaxis)
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 67/98
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 68/98
Polar
cylindrical

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 69/98
Robot Motions
Industrial Robot are designed to perform productive work. The work isaccom lished b enablin the robot to move its bod arm and wrist throu h aseries of motions and positions.
The movements can be divided into 1) Body motions 2) Wrist motions
The joints used in the design of industrial robot involve a relative motion of
the adjoining links that is either linear or rotational.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 70/98
The degree of freedom associated with the arm and body of the robot asshown in fig
The wrist movement are shown in fig

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 71/98
e space w n w c e ro o can man pu a e s wr s en . e spacewithin which the robot operates.The work volume is determined by the physical characteristics of the robot
1) Robot’s physical configuration2) Size of the body, arm and wrist component
3) The limits of the robot’s joint movementsLike a human arm, which is limited in reach, the range of a robot arm is limited toits so-called ”work envelope”. This area is determined by the mechanical
construction of the industrial robot and its kinematics.
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 72/98

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 73/98
r ve sys em s use o power e ro o . e r ve sys em e erm nes espeed of the arm movements, the strength of the robot and its dynamicperformance.
Types of Drive Systems
Electric drive
Hydraulic drive
Pneumatic drive

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 74/98
ectr c r ve ystemUsed medium robotic applications, provides higher speed or power ashydraulics systems.
Precise, accuracy and repeatability is better.
Electric drive robots are actuated by dc stepping motors or dc servomotors.
os o e ec r c mo or s ess compare o y rau c r ve.
Dc motor

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 75/98
• It is the precondition for the operation of hydraulic and pneumatic drives.
Benefits
•
• Largely maintenance-free drive
• High efficiency• Good positioning accuracy, low slip• Lower energy costs than for hydraulic and pneumatic systems• Relatively high safety if all standards are complied with and equipment is properlyprotected
Disadvantages
Very difficult to store, and only in small quantities (rechargeable/simple battery)
Speed regulators and controllers are expensiveVery high energy loss if transmitted across long distancesFire hazard due to spark formationExtra cooling necessary

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 76/98
Fields of application drives for vehicles (AC current locomotives, ship propulsion,multisystem locomotives, etc.)
drives in the textile industry drives in power plants (including nuclear power plants) drives for mechanisms and transfer devices loading and unloading machine drives pump drives, hoist drives
machine tool drives (reversing drives) drives for toys
H draulic Drive S stem

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 77/98
Hydraulic drives are used for larger robots, it provides greater speed andstrength.
Benefits Possibility of transmitting high forces and powers Sensitive, continuous adjustment of speed (rpm) and feed rate
High transmission ratio Easy reversal of the direction of rotation/motion quick reversal of direction of motion high operating accuracy and uniform movementsJerk- and chatter-free motion and protected against overload Power transmission possible over long distances (up to 100m)
Easy monitoring and testing Long life and low maintenance requirements
H draulic Drive S stem

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 78/98
Disadvantages
Viscosity changes of oil and power loss through fluid friction
Leakage problems and high manufacturing accuracy Inaccurate operation due to heat accumulation Tendency to oscillate, generation of noise and technology for
generatinghydraulic energy is expensive
Fields of application
Automobile construction and transport machinery Hydraulic steering mechanisms and vehicle and ship hydraulics Control en ineerin
Pneumatics Drive S stem

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 79/98
Pneumatic drives are used for smaller robots, limited to pick and place
Pneumatics (Greek ”pneuma”: breath) refers to all applications of pneumatics stems.
Pneumatic systems are machines and devices working with compressed or
aspirated air. The combination of pneumatic devices and electric devices(solenoids, etc.) is referred to as electropneumatics
Bosch Rexroth Manual
Pneumatics Drive S stem

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 80/98
Benefits quantity: air is available practically anywhere in unlimited quantities
ransport: a r can e transporte w t out osses n p pe nes over ong stances
storage: can be stored in and tapped from a pressure vessel (including gas cylinder)
emperature: a most nsens t ve to temperature var at ons, guarantee operat on un erextreme conditions
safety: no risk with respect to fire or explosion hazards
Clean medium: unless mixed with oil, compressed air does not cause environmental pollution
Construction: working elements are easy in construction and thus available at low cost
Speed: quick working medium, high piston speeds and short operating response times canbe achieved
ver oa pro ec on: e emen s can e opera e un s an s an are ere ore sa e aga nsoverloads
Pneumatics Drive S stem

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 81/98
Disadvantageso conditioning: very expensive, otherwise wear of pneumatic components by dirt particles andcondensed water
o compression: it is not possible to achieve uniform, constant piston speeds using
compressed air
o - ,between 20 to 30 kN
o exhaust air: high noise development, silencers and sound-absorbing materials required
Fields of application Clamping, feeding, assembly processes
Metal working, cutting and non-cutting forming processes and woodworking
Plastic materials working and measuring and testing
Construction industry and transport industry
Control Systems and Dynamic Performance

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 82/98
systems are;1) Limited sequence robots2) Playback robots with point –to-point control3) Playback robots with continuous path control4) Intelligent robots
m e sequence ro o sLimited sequence robots, controlled by setting limit switches or mechanical
stops to establish the end points of travel for each of their joint.
E . Sim le motions such as ick-and- lacePlayback robots
Playback robots, which a series of positions or motions are “taught” to the
,
Playback robots classified as 1) point –to-point (PTP) 2) continuous path (CP)
Playback robots with point –to-point control

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 83/98
the next.
Eg. Spot welding, drilling, pick-and-place
Playback robots with continuous control
CP robots are capable of performing motion cyclesin which the path followed by the robot iscontrolled.
This is achieved by providing a series of closely
spaced points which describe the desired path
Eg. Arc welding, spray painting
Bosch Rexroth Manual

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 84/98
Intelligent Robots
,

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 85/98
interact with its environment.
Intelligent robots, can alter their programmed cycle in response to conditionsthat occur in the workplace.
They can make logical decision based on sensor data received from the.
Intelligent robots, communicate during the work cycle with humans orcomputer based systems.
Dynamic Performance

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 86/98
The speed of response is capability of the robot to move to the next position ina short amount of time. The response time is related to robots motion speed.
The stability measured of the oscillations which occur in the arm during
movement from one position to the next.
A robot with good stability will exhibit little or no oscillations.
A robot should have good stability and a fast response time.
The stability can be controlled by incorporating damping elements in thedesign. The problem with high damping reduces the speed of response.
Precision of Movement
A

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 87/98
Accuracy Repeatability
The smallest step the robot can take.
inaccuracies.
The controller ability to divide the total range of movements into individual
.stored in the control memory.
Eg. One DOF robot with motion range of 1.0m and robot control memoryas 12- t storage, eterm ne contro reso ut on
No of increments = 2n = 212 = 4096
Control Resolution = 1.0/4096 = 0.00024m or 0.244mm
The control resolution are depends on mechanical inaccuracies like
d fl ti (b di ) i th t t l b b kl h t t hi f

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 88/98
deflection(bending) in the structural member, gear backlash, stretching ofthe pulley cords, leakage of hydraulic oil and other imperfections.
Resolution can be improved by increasing the bit capacity of the control
memory and mechanical inaccuracies of the system.
Accuracy

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 89/98
Accuracy of the robot is ability to position its wrist at a desiredposition within the work volume..
programmed(target) position, it is depends on control resolution.
Repeatability
Will th b t l t t th i t d th

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 90/98
Will the robot always return to the same point under thesame control conditions
End Effector

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 91/98
End Effector is the hand or tool that is attached to the wrist
End effector can be 1) Gripper 2) Tools
Gripper are used to grasp the objects, the gripping method may be, , , ,
Robotic Sensors
. ,
position velocity acceleration pressure etc

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 92/98
position, velocity, acceleration, pressure, etc.
The value measured is transmitted in the form of electric signalsto the controller.
The sensors are similar to the human sensing organs.
Robotic Sensors
E

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 93/98
Frequently measured
values are:
ErrorInputdata
Temperature
Pressure/Force
ProcessOuput
data
Flow
Humidity
h-value
Actuator Sensor
Revolutions perminute (speed)
Actual value
rocess
computer Controlinput
Robotic Sensors cont’d
The sensors used in robotics are

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 94/98
The sensors used in robotics are
1) Tactile (touch) sensors – These sensors with respond to contact.
Eg. Limit switches, pressure switches etc, these sensors used to
measuring the level of force and position.
2) Proximity and range sensors
Proximity sensors
,close to another but beforecontact has been made.
When the distance betweenthe objects can be sensed ,the device is known asrange sensors.
Robotic Sensors cont’d
3) Miscellaneous Sensors – Measurement of Temperature pressure andother variable

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 95/98
3) Miscellaneous Sensors Measurement of Temperature, pressure andother variable
4 Machine Vision
A Machine vision system iscapa e o v ew ng e worspace and interpreting whatit observes, these systems
perform inspection, partreorganization etc.
Robot Programming

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 96/98
1) Lead through programming
2) Textual programming
Lead throu h ro rammin
Lead through programming consists of forcing the robot arm to move through
Textual programming
Use English like language to establish the logic and the

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 97/98
Use English like language to establish the logic and thesequence of the work cycle.
MOVE P1 Move gripper to P1
CLOSE 40MM Close opening of 40mmWAIT 1SEC Wait for 1 secDEPART 60MM Departing from P1 by distance of 60mm
above the point
Advanta e of this method is ro rammin withouttaking the robot out of production.
Mechanical ro rammin
Robots are programmed by setting limit switches, mechanical stops etc.

8/7/2019 Robotics introduction-Chapter 1
http://slidepdf.com/reader/full/robotics-introduction-chapter-1 98/98
End of chapter 1