robot substrate handling system corrugated board (full auto) … · 2018-03-06 · robot substrate...
TRANSCRIPT
Robot Substrate Handling SystemCorrugated Board (Full Auto) (Dual Robot)
Why choose a Robot Substrate Handling System?
�� Range of Load & Unload Options
z Load1 - From a single stack to 1, 2, or 3 up on the vacuum table using the load robot.
z Unload - From the vacuum table to an uncollated stack using the unload robot.
�� Reduced Handling Time & Faster Changeover
z Robot Substrate Handling Systems reduce the overall cycle time of Onset X printers, offering users improved productivity.
z Load and unload pallets can be changed quickly, with printed sheets released to post-print finishing with minimal delay.
�� Supports a Range of Corrugated Board & Grades
z Head effectors designed and manufactured by Inca feature a number of suction cups that can be arranged in a variety of configurations, catering to a wide range of corrugated substrate sizes and flute grades.
z Distorted (bowed) substrate can be handled2 and comprehensive control of table vacuum level and zoning always ensures a flat surface for maximum print quality.
1 2 and 3 up only available with multi-pick configuration.2 Subject to limitations.
�� Reliability & Accuracy of Substrate Placement
z ABB robots have outstanding position repeatability and excellent path accuracy, permitting accurate and repeatable sheet loading on the vacuum table. This means images can be consistently printed in the same position on the substrate, making post-print finishing easier and more efficient.
�� Multiple Standard Layout Configurations with the Option to Customise
z Standard layout configurations offer a reduced footprint over traditional automation systems. If required, robot positioning and safety systems can be customised (subject to extra cost, delivery and installation time) to further maximise space utilisation.
�� Ease of Use
z Robot Substrate Handling Systems are fully integrated within the Inca GUI, making operation simple with minimal training requirements.
�� Supported by all Onset X Printers
z Robot Substrate Handling Systems are supported from the entry level Onset X1 through to the ultra-high productivity Onset X3.
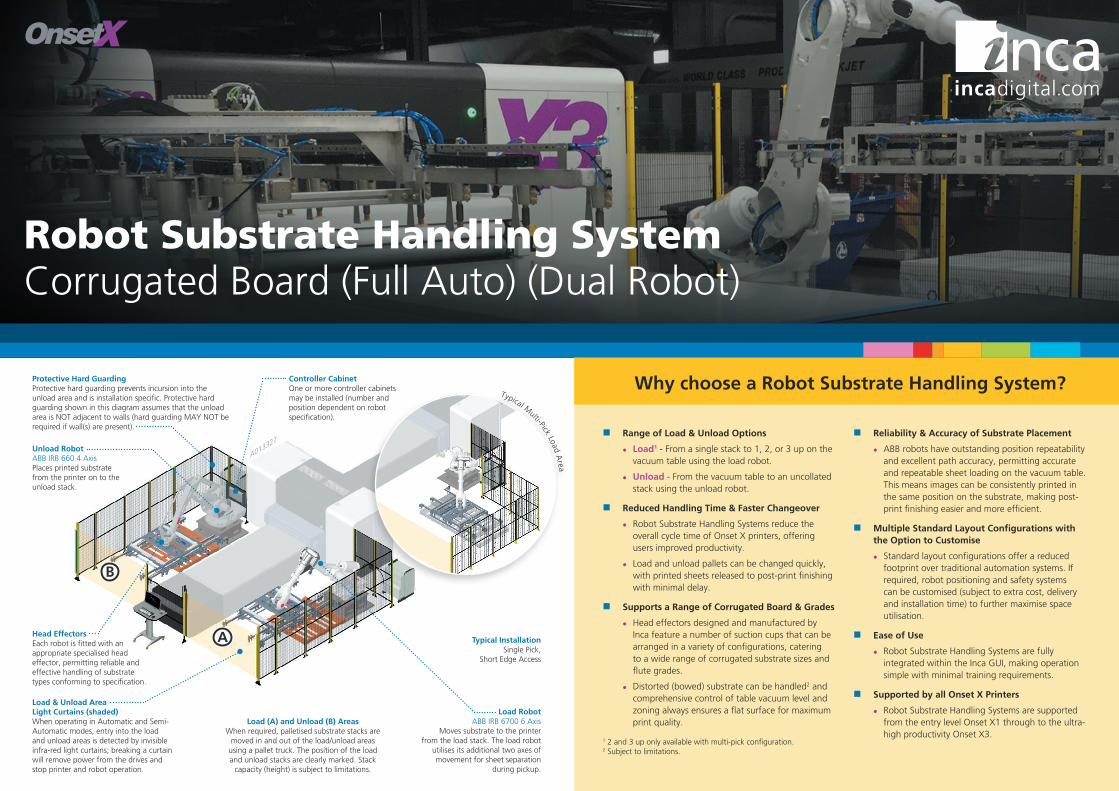
Load RobotABB IRB 6700 6 Axis
Moves substrate to the printer from the load stack. The load robot
utilises its additional two axes of movement for sheet separation
during pickup.
Unload RobotABB IRB 660 4 AxisPlaces printed substrate from the printer on to the unload stack.
Load (A) and Unload (B) AreasWhen required, palletised substrate stacks are
moved in and out of the load/unload areas using a pallet truck. The position of the load and unload stacks are clearly marked. Stack
capacity (height) is subject to limitations.
Load & Unload AreaLight Curtains (shaded)When operating in Automatic and Semi-Automatic modes, entry into the load and unload areas is detected by invisible infra-red light curtains; breaking a curtain will remove power from the drives and stop printer and robot operation.
A
B
Head EffectorsEach robot is fitted with an appropriate specialised head effector, permitting reliable and effective handling of substrate types conforming to specification.
Protective Hard GuardingProtective hard guarding prevents incursion into the unload area and is installation specific. Protective hard guarding shown in this diagram assumes that the unload area is NOT adjacent to walls (hard guarding MAY NOT be required if wall(s) are present).
Controller CabinetOne or more controller cabinets may be installed (number and position dependent on robot specification).
Typical InstallationSingle Pick,
Short Edge Access
Typical Multi-Pick Load A
rea
A013327
I © 2018 Inca Digital Printers Ltd. I
Robots1 Load Unload
Manufacturer ABB Asea Brown Boveri Ltd.
Model / # Axis IRB 6700 / 6 Axis IRB 660 / 4 Axis
Max. Height2 2.962 m (116.6 in) 2.957 m (116.4 in)
Supply 400-480 V; 3-phase and Protective Earth/Ground; 25 A per phase
Energy Consumption ISO-Cube: 2.85 kW ISO-Cube: 2.7 kW; Normal movements: 3.2 kW
1 Refer to manufacturer’s instructions for full specification including but not limited to dimensions, weight, service requirements (electrical, compressed air, etc.), environmental effects and safety systems.
2 Maximum operational height when installed to recommended specification using 500 mm plinth or base.
Inca Digital Printers Ltd. Head Effectors
Quantity 1 x Load; 1 x Unload
Suction Cups 36 per effector (12 adjustable)
Vacuum Bars 3 per effector (2 adjustable)
Smart Camera System Load effector only Ultrasonic Sensor 1 per effector
Compressed Air (per effector)
Pressure 6 bar (88 psi) Volume (at 6 bar) 1.3 m3/minute
Supply 20 mm diameter push fitting
Media & Handling - Full Automatic Operation
Supported Media Types1 Corrugated Board Flute Grades2 Micro, E, S, B, C, EB, BC
Number of Sheets3 Single Pick Configuration Single sheet load & unload
Multi-Pick Configuration Up to 3 sheets load & unload
Maximum Sheet Size Length (X): 3,220 mm (126.8 in); Width (Y): 1,600 mm (63 in)
Minimum Sheet Size Length (X): 805mm (31.7 in); Width (Y): 800 mm (31.5 in)
Gauge (Thickness)4 Minimum: 2 mm (0.078 in); Maximum 50 mm (2 in)
Maximum Weight5 10 kg (22 lb) Distortion6 25 mm (1 in) Distribution 125-300 gsm
Maximum Stack Capacity (Height)7
Load 1,300 mm (51.2 in)
Unload8 1,300 mm (51.2 in)
Table Loading Accuracy Accurate to ± 1 mm (0.039 in)
Configurations Short Edge Access Long Edge Access
Single Pick Footprint1 13.08 m x 8.12 m (514.8 in x 319.8 in) 13.08 m x 9.31 m (514.8 in x 366.6 in)
Multi-Pick Footprint1 13.08 m x 11.20 m (514.8 in x 441.1 in) 13.08 m x 12.08 m (514.8 in x 475.6 in)
Min. Ceiling Height2 3.2 m (126 in)
1 Machine + Robots + Hard Guarding; customisation may affect footprint; access space required.2 Provides necessary clearance for unimpeded robotic operation.
Safety System Components and specification are installation specific
Load & Unload Area Light Curtains1
Entry into load and unload areas is detected by invisible infra-red light curtains; breaking a curtain stops printer and robot operation
Programmable Laser Scanning System2
Configured with multiple exclusion (or safety) zones and controlled by multiple safety scanners to monitor equipment area for presence of (unprogrammed) obstacles and motion
Protective Hard Guarding Protective hard guarding prevents incursion into the load/unload areas
1 Active in Automatic and Semi-Automatic modes only.2 Incursions will stop printer when operating (robots non-operational in Manual mode).
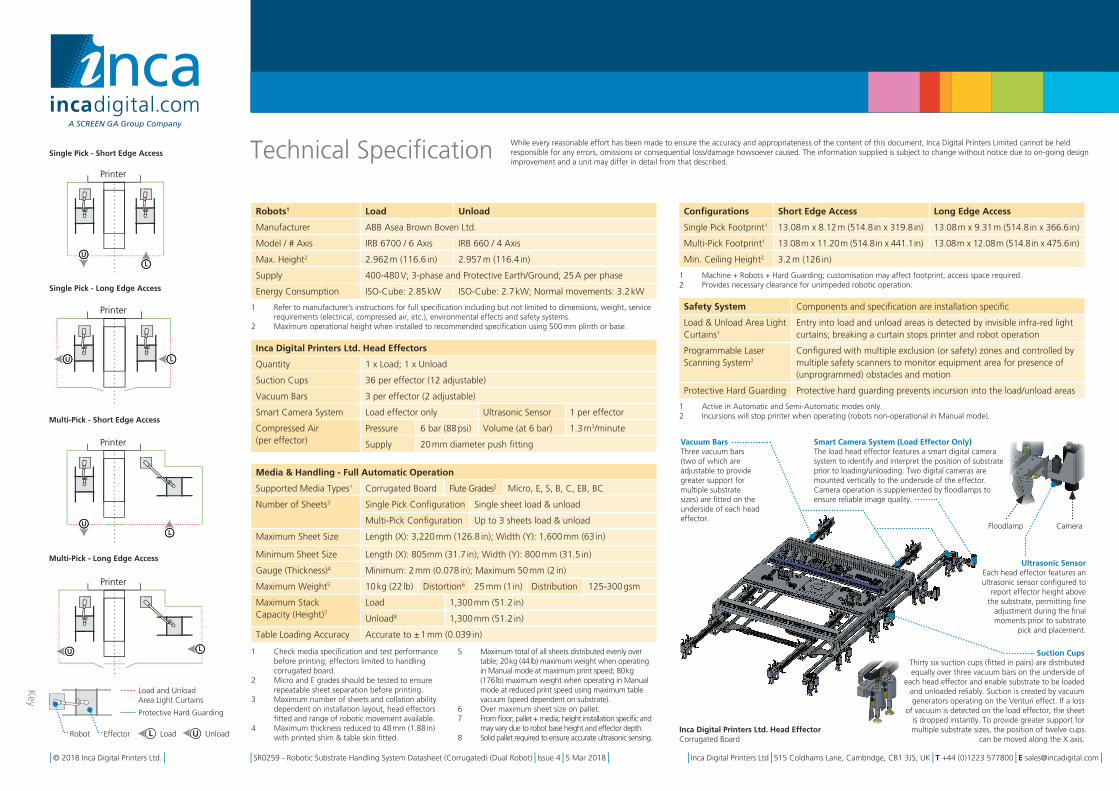
Vacuum BarsThree vacuum bars (two of which are adjustable to provide greater support for multiple substrate sizes) are fitted on the underside of each head effector.
Ultrasonic SensorEach head effector features an ultrasonic sensor configured to
report effector height above the substrate, permitting fine
adjustment during the final moments prior to substrate
pick and placement.
Suction Cups Thirty six suction cups (fitted in pairs) are distributed equally over three vacuum bars on the underside of
each head effector and enable substrate to be loaded and unloaded reliably. Suction is created by vacuum generators operating on the Venturi effect. If a loss
of vacuum is detected on the load effector, the sheet is dropped instantly. To provide greater support for multiple substrate sizes, the position of twelve cups
can be moved along the X axis.
Smart Camera System (Load Effector Only)The load head effector features a smart digital camera system to identify and interpret the position of substrate prior to loading/unloading. Two digital cameras are mounted vertically to the underside of the effector. Camera operation is supplemented by floodlamps to ensure reliable image quality.
Inca Digital Printers Ltd. Head Effector Corrugated Board
CameraFloodlamp
While every reasonable effort has been made to ensure the accuracy and appropriateness of the content of this document, Inca Digital Printers Limited cannot be held responsible for any errors, omissions or consequential loss/damage howsoever caused. The information supplied is subject to change without notice due to on-going design improvement and a unit may differ in detail from that described.
Technical Specification
1 Check media specification and test performance before printing; effectors limited to handling corrugated board.
2 Micro and E grades should be tested to ensure repeatable sheet separation before printing.
3 Maximum number of sheets and collation ability dependent on installation layout, head effectors fitted and range of robotic movement available.
4 Maximum thickness reduced to 48 mm (1.88 in) with printed shim & table skin fitted.
5 Maximum total of all sheets distributed evenly over table; 20 kg (44 lb) maximum weight when operating in Manual mode at maximum print speed; 80 kg (176 lb) maximum weight when operating in Manual mode at reduced print speed using maximum table vacuum (speed dependent on substrate).
6 Over maximum sheet size on pallet.7 From floor; pallet + media; height installation specific and
may vary due to robot base height and effector depth.8 Solid pallet required to ensure accurate ultrasonic sensing.
Printer
LU
Single Pick - Short Edge Access
Printer
U L
Single Pick - Long Edge Access
Printer
LU
Multi-Pick - Short Edge Access
Printer
LU
Multi-Pick - Long Edge Access
L Load U Unload
Load and Unload Area Light Curtains
Protective Hard Guarding
Robot Effector
Key
I SR0259 - Robotic Substrate Handling System Datasheet (Corrugated) (Dual Robot) I Issue 4 I 5 Mar 2018 I I Inca Digital Printers Ltd I 515 Coldhams Lane, Cambridge, CB1 3JS, UK I T +44 (0)1223 577800 I E [email protected] I
A SCREEN GA Group Company