robot crowd navigation using predictive position fields in the potential function framework ninad...
TRANSCRIPT
Robot Crowd Navigation using Predictive Position Fields in the Potential Function
Framework
Ninad Pradhan, Timothy Burg, and Stan Birchfield
Electrical and Computer Engineering,
Clemson University
ACC 2011

Motivation
Some examples of potential field navigation in recent literature:
• Ge and Cui (2002) include velocity information in addition to position to account for dynamic obstacles.
• Melchior et al. (2004, 2009) use fractional potential fields to represent ‘danger’ posed by an obstacle to robot’s motion.
• Huang et al. (2006) combined potential functions with knowledge about human visual navigation to propose a vision-guided navigation method for robots.
• Takahashi et al. (2010) propose a hierarchical potential function based design for a mobile robot for hospital applications.

Motivation
• To use the compact framework of potential function based navigation for indoor mobile robots.
• To allow potential fields to incorporate obstacle motion information and predicted obstacle path within the potential function framework.
• To use a computer vision-guided mobile robot system for– Map-based navigation for static goals
– Person-following or crowd navigation for dynamic goal positions.

Motivation

Background of potential functions
• Khatib (1986) proposed that the workspace be represented in terms of attractive and repulsive forces experienced by the mobile robot.
• The destination would be an attractor and obstacles in the field would provide repulsive forces, thus creating a potential field.
• Force experienced by the robot for its motion would be a vector sum of attractive and repulsive forces.
Image Source: http://www.cs.mcgill.ca/~hsafad/robotics/index.html

Background of potential function based navigation
• The problem with this approach was the existence of local minima – places in the potential field where attractive and repulsive forces balance out.
• Rimon and Koditschek proposed a modified potential function called a navigation function to ensure a single global minimum at the goal.
Image Source: Rimon and Koditschek, 1992.

Navigation in the sense of Rimon-Koditschek
• The Rimon-Koditschek formulation is the mathematical basis of this paper.
• Broadly, the navigation function requires the following terms to be defined:– Definition of the goal position or configuration for the robot.
– A boundary function which repels the robot from workspace boundary.
– An obstacle beta function for each obstacle, which repels the robot from obstacles.
• We modify the obstacle beta function so that the repulsion takes obstacle motion into account.

Application of Rimon-Koditschek: Chen (2005)
• Chen (2005) proposed a multiple robot navigation method based on the Rimon-Koditschek navigation model.
Multiple robot navigation in Chen et al (2005)
Application of Rimon-Koditschek: Chen (2005)
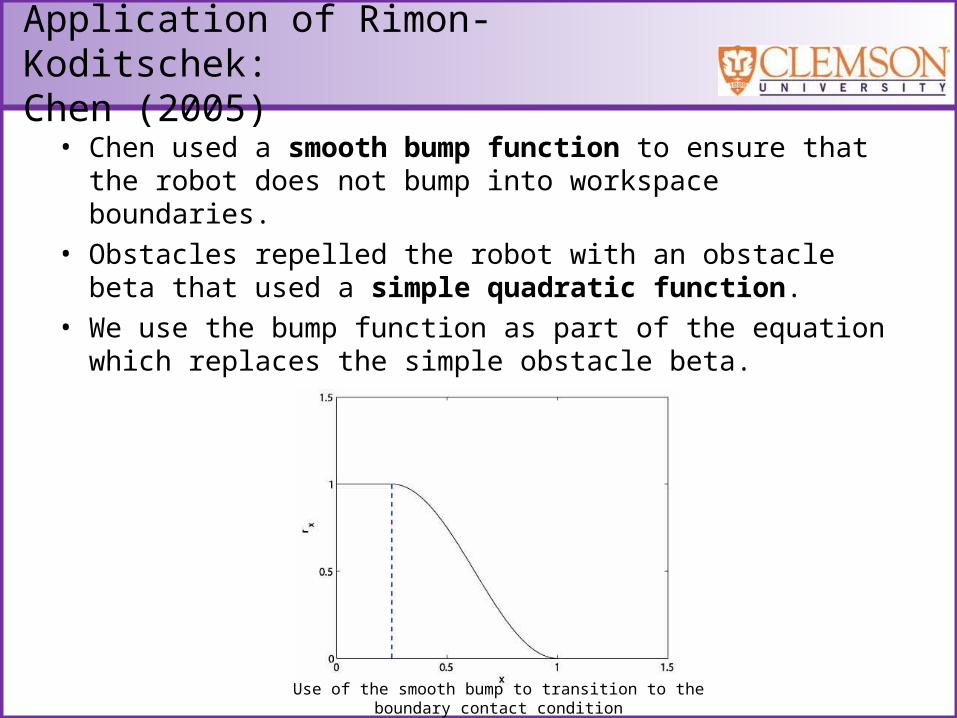
• Chen used a smooth bump function to ensure that the robot does not bump into workspace boundaries.
• Obstacles repelled the robot with an obstacle beta that used a simple quadratic function.
• We use the bump function as part of the equation which replaces the simple obstacle beta.
Use of the smooth bump to transition to the boundary contact condition

Contribution
• Identify that using knowledge of obstacle motion can inform the path traced by the robot to the goal and steer the robot clear of a collision course to the obstacle.
• None of the previous potential field papers capitalize on predictive information.
• Encode this knowledge in the Rimon-Koditschek framework, which has well-defined mathematical properties.
• Generate qualitative results which show the advantage of this formulation.
• Identify a clear path to future efforts which will improve on the proposed method.

The position field
• The isotropic obstacle beta used in previous work is changed to an anisotropic beta function.
• An elliptical position field is generated around the obstacle, such that– It encompasses the obstacle completely.
– It is skewed in the predicted direction of motion of the obstacle.
• The position field skews the gradient of the navigation function such that the path of the robot avoids the expected position of the obstacle.

Significance of the ellipse
• When nothing is known about obstacle motion, position field remains isotropic, the same as its original formulation.
• As more information becomes available about obstacle motion, circular field begins to skew in the direction of motion.
• Direction of major axis corresponds to the direction of motion.
• Length of major axis corresponds to speed of the obstacle.
Ellipse transition with growing knowledge

The obstacle beta function
• There are two simple constraints on the obstacle beta– Should go to zero at the point of contact between robot and
obstacle
– Should be a positive function of distance at all other points.
• The obstacle beta analytically switches between two terms– Robot outside the ellipse: high gradient away from the position
field.
– Robot inside the ellipse leading to contact with the obstacle: bump function used to repel the robot from the obstacle boundary.
• The curve for obstacle beta should be continuous and differentiable for it to fit the Rimon-Koditschek framework.

The obstacle beta function

Navigation function
Results
Navigation with and without position fields
Results
Navigation with and without position fields

Future Work
• Use predictive algorithms to provide parameters for the elliptical field.
• Best adapt the constraint of circular/spherical workspaces which is part of the Rimon-Koditschek framework to be able to use the method in realistic environments.
• Detect moving obstacles, including people, using vision and use this information in the predictive algorithms.
• Explore other geometries for the position field.
• Does the position field also optimize the path? Investigate.

Questions?