reuse-centric programming system support of machine learning
TRANSCRIPT

ABSTRACT
GUAN, HUI. Reuse-Centric Programming System Support of Machine Learning. (Under the directionof Xipeng Shen and Hamid Krim.)
Modern machine learning, especially deep learning, has shown dramatic progress. Its effective
adoption, however, faces a fundamental question: how to create models that efficiently deliver
reliable predictions to meet the requirements of diverse applications running on various systems.
This thesis introduces reuse-centric optimization, a novel direction for addressing the fundamental
question. Reuse-centric optimization centers around harnessing reuse opportunities for enhancing
computing efficiency. It generalizes the reuse principle in traditional compilers to a higher level and
a larger scope through innovations in both programming systems and machine learning algorithms
and their synergy. Its exploitation of computation reuse spans across the boundaries of machine
learning algorithms, implementations, and infrastructures; the types of reuse it covers range from
pre-trained Neural Network building blocks to preprocessed results for model training and even
memory bits; the scopes of reuse it leverages go from training pipelines of deep learning to variants
of Neural Networks in ensembles; the benefits it generates include (1) up to 9X faster k-means
configurations, (2) up to 186X speedup for finding a good smaller Convolution Neural Network
(CNN), (3) up to 2X faster ensemble training with data sharing, (4) the elimination of all space cost
in protecting parameters of CNNs.

© Copyright 2020 by Hui Guan
All Rights Reserved

Reuse-Centric Programming System Support of Machine Learning
byHui Guan
A dissertation submitted to the Graduate Faculty ofNorth Carolina State University
in partial fulfillment of therequirements for the Degree of
Doctor of Philosophy
Electrical Engineering
Raleigh, North Carolina
2020
APPROVED BY:
Huiyang Zhou Andrew Rindos
Xipeng ShenCo-chair of Advisory Committee
Hamid KrimCo-chair of Advisory Committee

ACKNOWLEDGEMENTS
I would like to thank my Ph.D. advisor Dr. Xipeng Shen. I am very fortunate to work on my thesis
under his guidance for the last four years of my Ph.D. I have learned a lot from him including how
to find and solve a research problem, how to present the work to audiences, and how to expand the
discovery to a broader scope. I am very grateful for his visionary advice, constructive discussion,
insightful feedback, and generous support. His passion to conduct impactful research and solve
challenging problems has greatly motivated me during my Ph.D. journey and will continue to have
a profound influence on my academic career. I could not have imagined having a better advisor for
my Ph.D. study.
I would also thank my co-advisor, Dr. Hamid Krim. I received his guidance since I joined his
research lab in 2014. During the past six years, Hamid offered me invaluable advice and uncountable
comments that guide me through challenging problems. He gave me the freedom to explore various
projects. He believed in me and gave me endless support. He convinced me to take numerous math
courses for a solid math background. He mentored me with his professional expertise, brilliant
thinking, and vast patience. I feel so fortunate to have Hamid as my co-advisor.
Besides my advisors, I would like to thank the rest of my dissertation committee members
(Dr. Huiyang Zhou, Dr. Min Chi, and Dr. Andrew Rindos) for their great support and valuable
suggestions. I am thankful to Dr. Huiyang Zhou, an expert in Computer Architecture and Systems,
for his tremendous contributions to many of my research projects. I am also grateful to Dr. Min Chi
for her insightful comments on writing good research proposals and identifying promising research
topics. I also appreciate the many internship opportunities provided by Dr. Andrew Rindos at IBM
and his generous support for funding my research projects.
I would like to thank my friends and lab mates for their continued support. This dissertation
would not be possible without the intellectual contribution of Yufei Ding, Lin Ning, Randall Pittman,
Laxmikant Mokadam, and Zhen Lin. Moreover, I am thankful to Guoyang Chen, Yue Zhao, Weijie
Zhou, Zifan Nan, Guoqiang Zhang, Yuanchao Xu, Chencheng Ye, Weiqi Sun, Shuai Yang, Dong Xu,
Jou-An Chen, Lei Zhang for making my experience in the PICTure Research Group and graduate
school exciting and fun. It was a pleasure working together with them all. I would also like to thank
Xing Pan for his long-lasting support, my roommate Jie Wang for her accompany, and many other
friends for making my Ph.D. life a memorable and enjoyable experience.
It has been an honor to work with many great researchers outside of NCSU. I would like to thank
Dr. Seung-Hwan Lim and Dr. Robert Patton from Oak Ridge National Labs. I have been collaborating
with them since 2017 and was given the great opportunity to work on large-scale systems, TITAN
and SummitDev supercomputers. The collaborations result in numerous exciting ideas and fruitful
publications. I also appreciate the great help from my recommendation letter writers, Dr. Chen Ding
and Dr. Michael Carbin for my faculty job search. I am grateful of the enjoyable discussions with
them, their valuable suggestions on both research and job search, and their huge efforts in realizing
my academic dreams.
ii

Finally, I would like to give my sincere thanks to my family: Mom, Dad, and my brother. Their
encouragement went through thousands of miles from home to the US to give me courage. I could
not accomplish what I did without their love and support.
iii

TABLE OF CONTENTS
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Chapter 1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Contribution and Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Chapter 2 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1 K-Means Clustering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Convolutional Neural Networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 CNN Architectures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.2 CNN Pruning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 DNN Training . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3.1 DNN Training Pipeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3.2 Data-Parallel DNN Training . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Chapter 3 Reuse-Centric K-Means Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2 Proposed Techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.1 Overview of K-Means Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.2 Overview of the Acceleration Techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2.3 Reuse-Based Filtering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2.4 Center Reuse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.2.5 Two-Phase Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3 Evaluations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.3.1 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.3.2 Speedups on Heuristic Search . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3.3 Speedups on the Attainment of Error Surfaces . . . . . . . . . . . . . . . . . . . . . . . 283.3.4 Quality Influence of Center Reuse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.3.5 Sensitivity Analysis and Insights . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Chapter 4 Composability-Based Fast CNN Pruning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.2 Composability-Based CNN Pruning: Idea and Challenges . . . . . . . . . . . . . . . . . . . . 414.3 Overview of Wootz Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.4 Hierarchical Tuning Block Identifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.4.1 Optimal Tuning Block Definition Problem . . . . . . . . . . . . . . . . . . . . . . . . . . 444.4.2 Hierarchical Compression-Based Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.5 Composability-Based Pruning and Wootz Compiler . . . . . . . . . . . . . . . . . . . . . . . . . 474.5.1 Mechanisms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.5.2 Wootz Compiler and Scripts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.6 Evaluations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.6.1 Experiment Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
iv

4.6.2 Validation of the Composability Hypothesis . . . . . . . . . . . . . . . . . . . . . . . . . 544.6.3 Results of Wootz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.7 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.8 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Chapter 5 Efficient Ensemble Training with Data Sharing . . . . . . . . . . . . . . . . . . . . . . . . 625.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.2 Overview of FLEET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 645.3 Resource Allocation Algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.3.1 Problem Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.3.2 Complexity Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.3.3 Greedy Allocation Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.4 Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 735.5 Evaluations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.5.1 Experiment Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755.5.2 End-to-End Speedups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785.5.3 Overhead . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.6 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 805.7 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Chapter 6 In-Place Zero-Space Memory Protection for CNN . . . . . . . . . . . . . . . . . . . . . . 836.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 836.2 Premises and Scopes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 846.3 In-Place Zero-Space ECC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
6.3.1 WOT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 866.3.2 Full Design of In-Place Zero-Space ECC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
6.4 Evaluations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 896.4.1 Experiment Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 896.4.2 WOT results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 906.4.3 Fault injection results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.5 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 916.6 Future Directions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 926.7 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Chapter 7 Conclusions and Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
BIBLIOGRAPHY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
v

LIST OF TABLES
Table 3.1 Data statistics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Table 3.2 Speedups on stochastic hill climbing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Table 3.3 Speedups on the attainment of error surfaces. . . . . . . . . . . . . . . . . . . . . . . . 28Table 3.4 Speedup in parallel settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Table 3.5 Speedups of center reuse across k with different k s t e p . . . . . . . . . . . . . . . . 34Table 3.6 Speedups of center reuse across k with different d s t e p . . . . . . . . . . . . . . . . 35Table 3.7 Speedups and distance savings for the first iteration of k-means with reuse-
based filtering across k . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Table 4.1 Dataset statistics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Table 4.2 Median accuracies of default networks (init, final) and block-trained networks
(init+, final+). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55Table 4.3 Speedups and configuration savings for ResNet-50 by composability-based
pruning (when 1, 4, or 16 machines are used for both baseline and composability-based methods as "#nodes" column indicates). Notations are at the tablebottom. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Table 4.4 Speedups and configuration savings for Inception-V3 by composability-basedpruning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Table 4.5 Speedups by composability-based pruning with different subspace sizes. . . . 59Table 4.6 Extra speedups brought by improved tuning block definitions. . . . . . . . . . . . 60
Table 5.1 The job of different processes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64Table 5.2 Notations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66Table 5.3 Mean and standard deviation of the running length of DNNs in seconds. (80
GPUs, 100 DNNs) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80Table 5.4 Scheduling and checkpointing overhead. . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Table 6.1 Accuracy and weight distribution of 8-bit quantized CNN models on Ima-geNet. The percentage rows use absolute values. . . . . . . . . . . . . . . . . . . . . . 85
Table 6.2 Accuracy drop of VGG16, ResNet-16, and SqueezeNet under different memoryfault rates. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
vi

LIST OF FIGURES
Figure 1.1 Overview of the reuse scopes, types, and benefits of reuse-centric optimization. 2Figure 1.2 Reuse is a principle for code optimizations in compilers. . . . . . . . . . . . . . . . 2
Figure 2.1 CNN and CNN Pruning. Conv1 and Conv2 are the first two consecutiveconvolutional layers in the CNN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 2.2 A DNN training pipeline [Pit18]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Figure 2.3 An illustration of data-parallel DNN training [Ser18]. . . . . . . . . . . . . . . . . . 11
Figure 3.1 Overview of k-means–based applications and where our three accelerationtechniques are applied. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 3.2 Illustration of how upper bound and lower bound can help avoid distancecomputation to some center c . Circles and double circles represent centersin current and previous iteration respectively, and b (x ) is the so-far nearestcenter of point x . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 3.3 Illustration of how the configuration with k = k1 can help save distancecomputation in the first iteration of another configuration with k = k2. b ′(x )is the closest center of point x when k = k1; c1, c2, c3 are the initial centersand b (x ) is the so-far nearest center of point x when k = k2. . . . . . . . . . . . . 19
Figure 3.4 Illustration of how the configuration with F1 can help save distance compu-tation in the first iteration of another configuration with F2, where b ′(x ) iscomputed from the closest center of point x in feature space F1, while c1, c2,... ck2
and b (x ) are the initial centers and the so-far nearest center of point xin feature space F2 respectively. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Figure 3.5 Illustration of center reuse across k . The two graphs represent the k-meanson two configurations with k equaling three (left) and two (right) respectively.The double circles in the left graph show the three centers attained in theexploration of that configuration. These centers are grouped to get two groupcenters c ′1, c ′2, which are then used as the initial centers (marked as circles inthe right picture) for exploring the latter configuration. . . . . . . . . . . . . . . . . 22
Figure 3.6 An example of an error curve and the illustration of curve segmentation. . . . 23
vii

Figure 3.7 Approximated classification error curves from the first phase for two datasets. 24Figure 3.8 Classification error curves for two datasets. . . . . . . . . . . . . . . . . . . . . . . . . 31Figure 3.9 Center reuse across k with inc/dec k on dataset connect. acc. is short for
accumulated. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Figure 3.10 Center reuse across feature sets with inc/dec d . . . . . . . . . . . . . . . . . . . . . . 34Figure 3.11 Reuse-based filtering performance on different k and different numbers of
landmarks (#lms) on adult (dim=11). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Figure 3.12 Reuse-based filtering performance on different k and different numbers of
landmarks (#lms) on adult (dim=59). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 4.1 Complementary relation with prior work for CNN pruning. Prior workshave designed heuristic criteria to quickly determine the importance of afilter [Li16; Hu16; Mol16; Luo17a], or to combine with reinforcement learn-ing for selecting the set of promising configurations [He18; Ash17]. Thiswork tries to accelerate the explorations of the remaining promising config-urations through computation reuse via composability (block pre-training)supported with a compiler-based framework. . . . . . . . . . . . . . . . . . . . . . . . 40
Figure 4.2 Overview of Wootz framework. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Figure 4.3 Formats for the specifications of promising subspaces (a) and pruning ob-
jectives (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Figure 4.4 Sequitur applies to a concatenated sequence of layers of four networks
pruned at rates: 0%, 30%, 50%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Figure 4.5 Illustration of composability-based network pruning. Eclipses are pruned
tuning blocks; rectangles are original tuning blocks; diamonds refer to theactivation map reconstruction error. Different colors of pruned tuning blockscorrespond to different pruning options. . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Figure 4.6 Accuracy curves of the default and block-trained networks on dataset CUB200.Each network has 70% least important filters pruned at all convolution mod-ules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Figure 4.7 Accuracies of pruned networks of ResNet-50 after training. The model sizeof full ResNet-50 is 25.6 million. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Figure 5.1 An illustration of the ensemble training pipeline in FLEET. P1 and P2 arepreprocessors and T1-T8 are trainers. There are four training groups, (T1),(T2, T3), (T4), (T5, T6, T7, T8), which train the four DNNs D1-D4 respectively.Edges indicate transfers of preprocessed images. . . . . . . . . . . . . . . . . . . . . 64
Figure 5.2 Illustration of the dataflow implementation. Two DNNs, D 1 and D 2, aretrained using four GPUs (Ranks 0-3) by two training groups, (T 1)and (T 2, T 3, T 4).T 1 and T 2 are training group masters. Sizes of QP , QT and QD are 2048 im-ages, 2048 images and 10 batches respectively. . . . . . . . . . . . . . . . . . . . . . . 74
Figure 5.3 Correlations between model size of a DNN and the training rate and thenumber of epochs until convergence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Figure 5.4 The profiled training rates (images/sec) of 100 DNNs in an ensemble withImagenet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Figure 5.5 The averaged speedups over the baseline in terms of the end-to-end timefor training a 100-DNN ensemble. The error bars show the variations. . . . . . 78
Figure 5.6 Waiting time per GPU. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
viii
Figure 6.1 Large weight (beyond [−64, 63]) distributions in 8-byte (64-bit data) blocksfor SqueezeNet on ImageNet. For instance, the first bar in (a) shows that ofall the 8-byte data blocks storing weights, around 380 have a large weight atthe first byte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Figure 6.2 Hardware design for in-place zero-space ECC protection. . . . . . . . . . . . . . . 89Figure 6.3 Changes of the total number of large values (beyond [−64, 63]) in the first 7
positions of 8-byte (64-bit data) blocks before the throttling step during theWOT training process. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Figure 6.4 Accuracy curves before and after the throttling step during the WOT trainingprocess. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Figure 7.1 Summary of the thesis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
ix

CHAPTER
1
INTRODUCTION
The performance of machine learning (ML) is improving rapidly in recent years. Convolutional
Neural Networks (CNNs) can surpass human performance on the ImageNet image recognition
competition [He15]; Transformer-based models can achieve state-of-the-art performance on many
natural language processing tasks [Dev18]; AlphaGo Zero can master the game of Go without human
knowledge [Sil17]. A wave of excitement about ML and deep learning has proliferated from academia
to industry, transforming prototypes in research labs to valid solutions to real-world problems.
The effective adoption of ML, however, faces a fundamental question: how to create models
that efficiently deliver reliable predictions to meet the requirements of diverse applications running
on various systems. On the one hand, ML techniques are increasingly adopted in a diverse range
of applications such as self-driving cars [Boj16], personalized recommendation [Par18], customer
assistance [Rah17], manufacturing [Zho17], healthcare [Mio18], and drug discovery [Che18a]. It is yet
to understand how to quickly and automatically discover models that best fit the specific task. On the
other hand, given the various hardware systems to support (e.g., supercomputers, clusters, personal
computers, phones, robotics, smartwatches, and embedded devices), it remains an open question
how to design and implement ML software systems that meet the various hardware constraints.
This thesis introduces reuse-centric optimization, a novel direction for addressing the funda-
mental question. It pioneers the systematic explorations of reuse in High-Performance Machine
Learning. Reuse-centric optimization centers around harnessing reuse opportunities for enhancing
computing efficiency. Computation/data/memory reuse has been one of the primary schemes in
programming systems for low-level code optimizations. Reuse-centric optimization generalizes the
principle to a higher level and a larger scope through innovations in both programming systems and
ML algorithms and their synergy. Its exploitation of computation reuse spans across the boundaries
1

Programming Systems
Machine Learning
Pre-trained neural networkbuilding blocks
Preprocessed results formodel training
Memory bits
Similar computation results
Types of Reuse
…
Scopes of Reuse
Algorithms
Implementations
Infrastructures
Up to 186X faster CNN pruning [Guan et al. PLDI’19] (Chapter 4)
Zero space cost memory fault protection for CNN [Guan et al.NeurIPS’19] (Chapter 6)
Up to 2X faster ensemble training with data sharing [Guan et al.MLSys’20] (Chapter 5)
5-9X faster k-means configuration [Guan et al. ICDE’18] (Chapter 3)
More … (Chapter 7)
Benefits of Reuse
Compiler
Figure 1.1: Overview of the reuse scopes, types, and benefits of reuse-centric optimization.
1. aß b + c2. bß a - d3. cß b + c4. dß a - d
Original block
1. aß b + c2. bß a - d3. cß b + c4. dß b
Rewritten block
Figure 1.2: Reuse is a principle for code optimizations in compilers.
of ML algorithms, implementations, and infrastructures; the types of reuse it covers range from pre-
trained Neural Network building blocks to preprocessed results and even memory bits; the scopes
of reuse it leverages go from training pipelines of deep learning to variants of Neural Networks in
ensembles; the benefits it generates extend from orders of magnitude faster search for a good smaller
Convolution Neural Network (CNN) to the elimination of all space cost in protecting parameters of
CNNs. An overview of the reuse scopes, types, and benefits of reuse-centric optimization is shown
in Figure 1.1.
1.1 Motivation
Reuse has been an effective approach in programming systems for improving the performance and
reliability of programs. Consider the four-statement basic block shown in Figure 1.2. The occurrence
of a – d in the fourth operation is redundant because a and d are not redefined. The compiler can
rewrite this block so that it computes a – d only once. The second evaluation of a – d is replaced
with a copy from b. Although the kind of optimization can be applied generally to any programs,
this instruction-level semantic-preserving program transformations have produced only limited
speedups.
Reuse-centric optimization aims to generalize the reuse principle to a higher level for larger
benefits. It expands the scopes of reuse to from low-level instructions to high-level algorithms and
workflows; it exploits more types of reuse that comes with the larger scope; it relaxes the semantic
constraints strictly followed in traditional compilers; it leverages domain knowledge and demands
2

new types of analysis and transformations; the benefits it generates are usually 10-100X speedups
instead of 5-20% as often seen in traditional optimizing compilers.
A few prior studies [Din15a; Din15b] have shown the dramatic performance improvements of
reuse-based algorithm-level optimization in distance-related data analysis algorithms. This thesis
aims to provide a more systematic exploration of reuse-centric optimization. As a general paradigm,
reuse-centric optimization can be applied to many domains. This thesis has been mainly focused
on its development in the ML domain due to the remarkable popularity and enormous impact of
ML techniques. Specifically, a set of simple yet effective reuse-centric optimization techniques are
developed for efficient model discovery and reliable model inference.
Motivation for Efficient Model Discovery. The broad range of ML applications leads to the di-
verse needs of ML models and deployment environments. Some applications require large-scale
models running on supercomputers to meet accuracy requirements while others need small models
deployed on resource-limited devices for energy efficiency or latency constraints. However, cre-
ating models for a specific task, called model discovery, is a time-consuming process due to the
enormous configuration space and the slowness of learning algorithms. One example is k-means
configuration, which is to find a configuration of k-means (e.g., #clusters, feature sets) that maximize
some objectives. It is a time-consuming process due to the iterative nature of k-means. A more
notorious example is CNN pruning, which tries to find a smaller CNN architecture by removing some
components from the network. It is an important method to adapt a large CNN model attained on
general datasets to a more specialized task or to fit a device with stricter space or power constraints.
Finding the best-pruned network is time-consuming due to the combinatorial problem space and
the day-long model training time. Efficient model discovery has been a major challenge to customize
ML techniques to fit the requirements of various applications and deployment contexts.
Motivation for Reliable Model Inference. ML algorithms are being actively explored for safety-
critical applications such as autonomous vehicles and aerospace, where it is essential to ensure
the reliability of inference results. The prediction results from a deployed ML model could cause
catastrophic consequences such as car accidents and life-threatening operations. One of the key
threats to reliable inference is memory faults. Traditional methods such as error correction codes
(ECC) and Triple Modular Redundancy (TMR) usually incur substantial memory overhead and
energy costs. The costs worsen the limit on model size and capacity and increase the cost of the
overall solution. Other threats to reliable inference include new fault models resulting from novel
hardware design, incorrect training sets, software implementation errors and even bad model
choices and algorithm design.
1.2 Contribution and Thesis Outline
This thesis reports our systematic explorations of reuse-centric optimization for improving the
efficiency and reliability of ML through innovations in algorithms and programming systems. The
contributions of this thesis are:
3

• A set of reuse-centric approaches to accelerate k-means configuration by promoting multi-
level computation reuse across the explorations of different configurations. The approaches
produce 5-9X speedups.
• A compiler-based framework called Wootz that, for the first time, enables composability-based
CNN pruning by generalizing Teacher-Student Network training for pre-training common
convolutional layers. Wootz produces up to 186X speedups for CNN pruning.
• A flexible ensemble Deep Neural Network (DNN) training framework called FLEET that effi-
ciently trains a heterogeneous set of DNNs with data sharing. FLEET produces up to 1.97X
speedups over the state-of-the-art framework that was designed for homogeneous DNN
ensemble training.
• In-place zero-space cost ECC assisted with a new training scheme called weight distribution-
oriented training that can provide the first known zero space cost memory protection for
CNNs.
All these techniques center around exploiting reuse opportunities with the first three contribut-
ing to efficient model discovery while the last one focusing on reliable model inference. As shown
in Figure 1.1, reuse-centric k-means configuration shows the power of reuse-centric optimization
for efficient model discovery at the implementation level; Wootz at the algorithm and compiler
level; FLEET at the infrastructure level. In-place zero-space cost ECC further demonstrates the
power of reuse-centric optimization for reliable inference by memory reuse — that is, reusing the
highest-order bit in CNN parameters.
The outline of the rest of the thesis is as follows:
Chapter 2 provides the background of several ML algorithms (k-means, DNNs) and model
training pipelines that are important for following the rest of the thesis.
Chapter 3 describes reuse-centric k-means configuration, which consists of a set of reuse-centric
approaches for faster k-means configuration. We propose reuse-based filtering, center reuse, and a
two-phase design to capitalize on the reuse opportunities on three levels: validation, k , and feature
sets. We meanwhile provide some important insights on how to effectively apply the acceleration
techniques to tap into full potential.
Chapter 4 describes a compiler-based framework named Wootz for faster CNN pruning. The
framework includes a compression-based algorithm to efficiently identify reuse opportunities when
training a collection of pruned CNN models, a new training scheme called composability-based
CNN pruning for pre-training reusable neural network building blocks, and a compiler and scripts
to automate the optimization.
Chapter 5 describes a flexible ensemble training framework called FLEET that efficiently trains
a heterogeneous set of DNNs. We theoretically prove that optimal resource allocation is NP-hard
and propose a greedy algorithm to efficiently allocate resources for training each DNN with data
sharing. We integrate data-parallel DNN training into ensemble training to mitigate the differences
4

in training rates and introduce checkpointing into this context to address the issue of different
convergence speeds.
Chapter 6 presents zero-space cost memory fault protection for CNN. The work, for the first
time, enables CNN memory fault protection with zero space cost through bit-level memory reuse.
The design capitalizes on the bit-level reuse opportunities by embedding the error correction codes
into non-informative bits. It further amplifies the opportunities by introducing a novel training
scheme, Weight Distribution-Oriented Training (WOT), to regularize the weight distributions of
CNNs such that they become more amenable for zero-space protection.
Chapter 7 summarizes the thesis and discusses future work for building efficient and reliable
ML systems.
5

CHAPTER
2
BACKGROUND
In this chapter, we provide some background on some machine learning (ML) models (k-means
clustering and DNNs) and model training pipelines used in the thesis.
ML is the study of algorithms that make computers learn to perform a specific task without
using explicit instructions. ML builds mathematical models based on sampled data (also called
training data) to make predictions or decisions. It has been used in a wide range of applications
including computer vision [Kri12], recommender systems [Par18], manufacturing [Zho17], health
care [Mio18], and many others.
ML can be classified into several broadly-defined categories. Supervised learning builds mathe-
matical models based on training data that contain both inputs and desired outputs. The desired
outputs are also called labels. For example, when we want to build a classifier to recognize whether
a dog is in an image, the training data should contain both images with and without dogs and
the label for each image. Both classification and regression algorithms are supervised learning.
Classification algorithms are used when the outputs have a limited set of values while regression
algorithms fit the situations where the outputs are continuous such as price, length, weights and
conversion rate. When an algorithm has to learn from training data where only part of the data
has labels, the algorithm falls into the category of semi-supervised learning. Unsupervised learning
builds mathematical models based on only inputs and is typically used to discover patterns or
structures in the data such as clustering of data points or a distribution that generates the training
data. K-means clustering is an unsupervised learning algorithm while k-nearest neighbor (KNN)
and CNNs are supervised learning algorithms. Other types of ML learning algorithms include active
learning, reinforcement learning, and meta learning.
6

An essential step to perform ML is to train a mathematical model on some training data and then
make predictions based on the trained model. Next, we explain two types of ML models, k-means
clustering and Convolutional Neural Networks (CNNs), we experiment with in the thesis.
2.1 K-Means Clustering
K-means clustering is an unsupervised ML algorithm that aims to partition training data into k
clusters where each data point belongs to its nearest cluster. The distance between a data point and
a cluster is calculated as the distance between the data point and the center of the cluster called
cluster center. Each cluster has one cluster center and is calculated as the mean of data points that
belong to the cluster. K-means clustering partitions training data by minimizing within-cluster
variances measured by squared Euclidean distances. The optimization problem is NP-hard. The
most commonly used heuristic algorithm to solve the problem is Lloyd’s algorithm. There are faster
alternatives such as Yinyang k-means [Din15b].
Lloyd’s algorithm works in the following way. Given an initial set of K cluster centers, c (0)1 , · · · , c (0)K
and N data points x1, · · · , xN , the algorithm alternates between two steps until the convergence
criteria is met:
1. Assignment step: Assign each data point to the nearest cluster such that each cluster contain a
set of data points S (t )i = {xn : ||xn−c (t−1)i ||2 ≤ ||xn−c (t−1)
k ||2, n = 1, 2, · · · , N }, where i = 1, 2, · · · , K
in the t step.
2. Update step: Update each cluster center based on the equation c (t )i = 1
|S (t )i |
∑
xn∈S (t )ixn for
i = 1, 2, · · · , K .
The algorithm converges when the assignments do not change or a maximum number of steps is
reached.
As one of the most popular data mining algorithms [Wu08], k-means clustering has been used
in many applications. Its uses go far beyond simple clustering. An important use of k-means, for
instance, is for model-free classifier construction. After clustering some training data in the feature
space, the method may use the labels of each cluster to classify any new data item falling into that
cluster [Fri01]. Another example is to use k-means for feature learning by using the centroids of the
clusters to produce features [Coa12].
We experiment with k-means clustering to evaluate our reuse-centric optimization in Chapter 3.
2.2 Convolutional Neural Networks
Neural networks are a class of ML models that consists of neurons and connections. A neuron
receives many inputs from the preceding neurons and produces one output. It calculates the output
as a weighted sum of the inputs followed by a non-linear activation function. A connection wires
two neurons with a weight, transforming the output of the predecessor neuron as the input of the
7

… …… …Filter 1: 𝑊1 = [𝑤11, 𝑤12, 𝑤13];
Filter 2: 𝑊2 = [𝑤21, 𝑤22, 𝑤23];
Filter 3: 𝑊3 = [𝑤31, 𝑤32, 𝑤33].
Weight
Conv 2
Conv 1
… …… …Prune Filter 2
𝑊1 𝑊1 𝑊2 𝑊2 𝑊3 𝑊3 𝑊3 𝑊3𝑊1 𝑊1
(a) (b)
Figure 2.1: CNN and CNN Pruning. Conv1 and Conv2 are the first two consecutive convolutionallayers in the CNN.
successor neuron. The successor neuron uses the connection’s weight to multiply the input. A layer
contains a collection of neurons. Two layers can have their neurons connected in various patterns
but neurons within a layer are not connected.
A Deep Neural Network (DNN) is a neural network that contains many layers. Modern DNNs can
contain up to thousands of layers. The weights inside a DNN can be adjusted to learn the mapping
between the inputs and the desired outputs through a learning process called training. After training,
one can use the well-trained DNN to make predictions based on given inputs. This process involves
only a forward pass from the first layer to the last layer and is referred to as inference. Recent years
have witnessed rapid progress in the development of DNNs and their successful applications to the
understanding of images, texts, and other data from sciences to industry [Pat18; Mat18; Rat12].
Convolutional Neural Networks (CNN) is a major class of DNN models. The core of a CNN
consists of many convolutional layers, and most computations at a layer are convolutions between
its neuron values and a set of filters on that layer. A filter consists of a number of weights on input
connections, as Figure 2.1 (a) illustrates. CNNs are important for a broad range of learning tasks,
from face recognition [Law97], to image classification [Kri12], object detection [Ren15], human pose
estimation [Tom14], sentence classification [Kim14], and even speech recognition and time series
data analysis [LeC95].
We next enumerate several popular CNN architectures and then give some background on CNN
pruning that is important to understand Chapter 4 of the thesis.
2.2.1 CNN Architectures
Many CNN architectures are proposed in recent years. We list the CNN architectures used in our
experiments.
AlexNet [Kri12] is proposed in 2012 and has had a large impact in the field of ML. The model
significantly decreased the error rate of image classification compared with previous ML-based
approaches. It contains five convolutional layers and three fully connected layers. The total number
of parameters is 61 million.
VGG16 [Sim14] improves AlexNet by replacing large kernel-sized filters with a multiple of 3x3
kernel-sized filters and stacking more convolutional layers. It has 13 convolutional layers and three
fully connected layers. The total number of parameters is 138 million. VGG16 has many variants such
as VGG11, VGG19. These variants have a different number of layers. Due to the strong generalization
8

ability, VGG16 and its variants are also widely used in many other computer vision tasks (e.g., image
segmentation).
Inceptions are a class of parameter-efficient CNNs featured by a novel modular design [Sze15;
Iof15; Sze16]. Inception-V1 (also called GoogleNet) [Sze15] has 7 million parameters. It contains nine
inception modules and each module contains a set of convolutional layers structured in a certain
way. There are two auxiliary loss layers connected to intermediate layers to provide additional
regularization during training. Inception-V2 [Iof15] and Inception-V3 [Sze16] further improve the
accuracy of Inception-V1 on ImageNet by incorporating many tweaks such as factorizing NxN
convolutions into 1xN or Nx1 asymmetric convolutions and adding batch normalization layers.
These tweaks help reduce the number of parameters or improve model accuracy.
ResNets [He16] are a class of CNNs featured by bypass layers. A bypass layer connects two
convolutional layers by skipping the convolutional layers between them. It allows gradients to flow
more easily backward to alleviate vanishing gradient problem. Similar to Inceptions, ResNets also
follow a modular design. One example of ResNets family is ResNet-50, which contains 16 residual
modules and one fully connected layer. Each residual modules have 3 convolutional layers. The
model has 25 million parameters and a total of 50 convolutional layers.
DenseNets [Hua17] build on dense blocks. A dense block connects each layer to all the preceding
layers inside the block. This means each layer will take the activation maps from all preceding layers
directly and its output activation map will also be used as inputs to all the subsequent layers. This
kind of connectivity pattern can achieve similar accuracy as ResNet on ImageNet with half amount
of parameters.
SqueezeNet [Ian16b] is a compact model designed for mobile applications. It can achieve an
similar accuracy as AlexNet but has only 1.2 million parameters. SqueezeNet contains eight Fire
modules (similar to inception modules or residual modules) and has a total of 26 convolutional
layers.
We experiment with the above CNN models to evaluate our reuse-centric optimization in Chap-
ters 4, 5, and 6. Recent advance in DNNs has led to the emergence of many open-source frame-
works including TensforFlow [Aba15], PyTorch [Pas19], Caffe [Jia14], TVM [Che18b], CNTK [Sei16],
Keras [Cho15] and many others. We use TensorFlow and PyTorch to train CNNs in our experiments.
Details of DNN training pipelines are elaborated in Section 2.3
2.2.2 CNN Pruning
CNN pruning is a method that reduces the size and complexity of a CNN model by removing some
parts, such as weights or filters, of the CNN model and then retraining the reduced model, as
Figure 2.1 (b) illustrates. It is an important approach to adapting large CNNs trained on general
datasets to meet the needs of more specialized tasks [Tia17; Ye18]. An example is to adapt a general
image recognition network trained on a general image set (e.g., ImageNet [Rus15]) such that the
smaller CNN (after retraining) can accurately distinguish different bird species, dog breeds, or car
models [Luo17a; Mol16; Liu17a; Ye18]. Compared to designing a CNN from scratch for each specific
9

Operation
State of DataStorage Data Access
PreprocessingTraining
Raw data
PreprocessedData
Figure 2.2: A DNN training pipeline [Pit18].
task, CNN pruning is an easier and more effective way to achieve a high-quality network [Mol16;
Gor18; O’K18; Liu17a; Tia17]. Moreover, CNN pruning is an important method for fitting a CNN
model on a device with limited storage or computing power [Han15a; Yan17].
For a CNN with L convolutional layers, let Wi = {Wj
i } represent the set of filters on its i -th
convolutional layer, and W denote the entire set of filters (i.e., W = ∪Li=1Wi .) For a given training
dataset D , a typical objective of CNN pruning is to find the smallest subset of W , denoted as W ′, such
that the accuracy reachable by the pruned network f (W ′, D ) (after being re-trained) has a tolerable
loss (a predefined constant α) from the accuracy by the original network f (W , D ). Besides space,
the pruning may seek for some other objectives, such as maximizing the inference speed [Yu17], or
minimizing the amount of computations [He18] or energy consumption [Yan17].
The optimization problem is challenging because the entire network configuration space is as
large as 2|W | and it is time-consuming to evaluate a configuration, which involves the re-training
of the pruned CNN. Previous work simplifies the problem as identifying and removing the least
important filters. Many efficient methods of finding out the importance of a filter have been pro-
posed [Liu17b; Hu16; Li16; Mol16; Luo17a; He17].
The pruning problem then becomes to determine how many least important filters to remove
from each convolutional layer. Let γi be the number of filters removed from the i -th layer in a
pruned CNN and γ = (γ1, · · · ,γL ). Each γ specifies a configuration. The size of the configuration
space is still combinatorial, as large as∏L
i=1 |Γi |, where Γi is the number of choices γi can take.
Prior efforts have concentrated on how to reduce the configuration space to a promising sub-
space [Hoo11; He18; Ash17]. But CNN training is slow and the reduced space still often takes days to
explore. Our work introduced in Chapter 4 focuses on a complementary direction, accelerating the
examinations of the promising configurations.
2.3 DNN Training
This section provides the necessary background of DNN training pipeline and data-parallel DNN
training.
10

Data Storage
Model Gradients AveragedGradients
Model Gradients AveragedGradients
Model Gradients AveragedGradients
Red
uce
Ope
ratio
n
Every processreads different
data
Preprocessor
Preprocessor
Preprocessor
Figure 2.3: An illustration of data-parallel DNN training [Ser18].
2.3.1 DNN Training Pipeline
DNNs are commonly trained using stochastic gradient descent (SGD) [Bot10]. To train a DNN, an
objective function is required to evaluate the model’s prediction compared with the desired outputs
for given inputs. An objective function is also called loss function or cost function if we want to
minimize the value calculated by the function. The output of a loss function is simply referred to
as loss. The gradient in gradient descent means error gradient of loss over variables to train. The
weights in a DNN is trained by moving their value in the negative direction of the gradients so that
the loss is reduced. A learning rate is used to control how much change we make to each weight. It
usually takes hundreds of thousands of iterations to train a DNN.
A typical DNN training pipeline is an iterative process containing three main stages: data fetching,
preprocessing, and training, as shown in Figure 2.2. In each iteration, data is fetched to the main
memory and then run through a sequence of preprocessing operations such as decoding, rotation,
cropping, and scaling. The preprocessed data is arranged into batches and consumed by the training
stage. The batch size is the number of data samples used simultaneously per step.
The modern computing clusters and data centers have evolved into a hybrid structure that con-
tains both CPUs and GPUs on each node. These heterogeneous CPU-GPU clusters are particularly
useful for DNN training as CPUs and GPUs can work together to accelerate the training pipeline.
Compared to the training stage, preprocessing is usually less computation-intensive. To pipeline
the preprocessing and DNN training, typically preprocessing is performed on CPUs while training
on another batch of data happens simultaneously on GPUs.
2.3.2 Data-Parallel DNN Training
Data-parallel DNN training trains a single DNN using multiple training pipelines where each pipeline
handles a different subset of data. As illustrated in Figure 2.3, each pipeline fetches a different subset
11

of data from storage and prepossesses data independently. In the training stage, gradients are
calculated by each pipeline and are reduced so that every pipeline has the same averaged gradients.
The averaged gradients are used to update the model to make sure each pipeline has the same copy
of model parameters.
Pipelines in data-parallel DNN training can run either on the same computing node using
intra-node communication (single node multiple GPU training) or different nodes using inter-node
communication (multiple-node multiple-GPU training). For the existing communication interfaces
(e.g., MPI), intra-node communication is usually more efficient than inter-node communication.
Thus, it is preferred to allocate pipelines on the same computing node rather than on different
nodes. As it is common to run only one pipeline on a single GPU, the number of GPUs available
to train a DNN model practically limits the maximum number of pipelines that can be created in
data-parallel DNN training. Data-parallel DNN training is used to train CNNs in Chapter 5.
12

CHAPTER
3
REUSE-CENTRIC K-MEANS
CONFIGURATION
3.1 Introduction
The effectiveness of k-means in applications depends on many factors, such as the features used for
clustering and the resulting number of clusters. As a result, algorithm configuration is essential for
k-means–based data mining [Kal12; Ber12]. On the other hand, as an iterative algorithm, k-means is
very time-consuming to run on large datasets. The configuration of k-means for a dataset requires
many runs of k-means in various settings. The time-consuming nature of k-means and the required
repeated runs of k-means in its configuration make k-means–based data mining a time-consuming
process, a problem being continuously exacerbated by the rapid growth of data in this era.
There are some general methods proposed for speeding up the configuration process of algo-
rithms [Hol12]. They have mostly focused on how to reduce the number of trial configurations. How
to accelerate the examination of the remaining configurations through historical information reuse
is a complementary direction that has not received sufficient explorations. And how to effectively
accomplish it for k-means is yet a largely unexplored problem.
This chapter presents a systematic exploration in that direction. It introduces the concept of
reuse-centric k-means configuration, which promotes information reuse across the explorations of
different configurations of k-means. The motivating observation is that the explorations of different
configurations of k-means share lots of common and similar computations. Effectively reusing the
computations could largely cut the configuration time with little or no effect on the quality of the
final results.
13

To materialize the idea, this work strives to answer three main research questions:
• What historical information is essentially useful for k-means configuration?
• How to efficiently reuse the information to maximize the reuse benefits?
• Whether and how much the reuse-based optimizations affect the final results?
Specifically, we have designed two techniques, called reuse-based filtering and center reuse, to
promote computation reuse across trials of different configurations.
Reuse-based filtering takes advantage of the clusters and the distance between a point and
its nearest center unveiled in a previous trial of k-means. Through the reuse, it is able to leverage
triangle inequality to avoid some distance calculations–that is, using computationally efficient lower
bounds of the distances between a point and potential centers to filter out some centers that are
unlikely to be the nearest to a point, and avoid calculating the distances to those centers. (§ 3.2.3)
Center reuse is to use the clustering results of some earlier trials to initialize cluster centers for
some later trials on different configurations. The reuse helps make the later trials converge faster
and hence saves configuration time. (§ 3.2.4)
For both types of reuse, we have explored the opportunities in multiple levels: across validations,
across k , and across feature sets. Besides their effectiveness in drastically cutting configuration
time, an appealing property of these techniques is their simplicity. They are designed to be simple
to implement and deploy to ensure their applicability in general data mining applications.
In addition to the two techniques, we have also explored the use of a two-phase design to
speed up the configuration process when a full error surface is needed for meeting various desired
trade-offs among multiple quality metrics (e.g., different weights of the classification errors over the
classification time). (§ 3.2.5)
We evaluate the efficiency and effectiveness of these techniques by way of both the configuration
speed and quality of the final results, in both sequential and parallel settings. Our results show that
these techniques can work together in synergy, speeding up a heuristic search-based configuration
process by up to 5.8X. When they are used to speed up the attainment of the error surface of k-
means–based classifiers, they shorten the process by a factor of 9.1. All the optimization techniques
we propose cause no change to the final k-means results except for the center reuse technique. We
conduct a focused study on its influence, which concludes that the caused disparity is negligible
(less than 3%). We further provide some sensitivity study to reveal how the optimization techniques
perform in various settings, and point out some important insights—such as, the directions of
configuration explorations—on how to deploy them to tap into a full potential. (§ 3.3)
Overall, this work makes the following major contributions:
• It provides the first systematic study on how historical information reuse may help speed up
the k-means configuration process.
• It proposes a set of novel techniques to effectively promote information reuse across explo-
rations of different k-means configurations.
14

• Through sensitivity studies, it reports the performance of the techniques in various settings,
and sheds some important insights on the suitable ways to deploy these techniques.
• It demonstrates large (5–9X) speed benefits from these techniques, and confirms only little
disparity they may cause to the quality of k-means results.
3.2 Proposed Techniques
We describe, in this section, our proposed techniques. Before then, we first discuss the factors and
objectives necessary to consider in k-means configuration.
3.2.1 Overview of K-Means Configuration
Understanding the usage of k-means in real applications helps understand the purpose and objec-
tives of k-means configuration.
Even though k-means is a clustering tool, it is often used as a module for a purpose beyond
simple clustering. In k-means–based data classification, for example, through k-means, training
data are grouped into clusters, which are then used for classifying test data: The cluster centers are
used as compact representations of the data, and each center has an associated class label decided
by its data-point members. The classification of a testing data point is then made to the class of its
closest cluster center.
Figure 3.1a outlines a general structure of applications that use k-means. Data are first projected
onto some feature space. K-means clustering subsequently runs on the projected data to form some
clusters, which are then used by the application for some follow-up purposes (e.g., classification).
K-means configuration is a process of finding the configuration (e.g., the number of clusters k
and feature sets) that can maximize certain objectives. The objectives are often aimed at maximizing
the quality of the ultimate results of the application (e.g., classification accuracy); some internal
metrics of clustering (e.g., within and across cluster distances) could be relevant but are usually
secondary to the application-level objectives. Cross-validation (e.g., on data classification) is often
used in the process to help assess the quality of a configuration.
Figure 3.1a also illustrates two important factors of k-means to configure and to impact the
applications in some way. The first is the set of features to extract or select from the raw data, and
the second is k , the number of clusters to form. Although the configuration involves only two
factors, even with the fast Yinyang k-means algorithm [Din15b], on a dataset of modest size, the
configuration is still computationally intensive (days) when exploring all combinations of k and
feature sets. There are some other factors that could also be worth tuning, such as the definitions of
distance, the ways to do feature extraction. However, the two factors (k and feature sets) have the
largest numbers of variants and hence dominate the configuration space. Our discussion in this
work focuses on them; thanks to the combinatorial nature of the space, the speedups attained for
their configurations directly translate to the overall speedups of the whole configuration process
despite the presence of other secondary factors one may wish to tune.
15

(a) A general structure of k-means–based applicationswith k-means configuration.
(b) The overview of the acceleration techniques.
Figure 3.1: Overview of k-means–based applications and where our three acceleration techniquesare applied.
Our acceleration techniques pertain to the most time-consuming k-means clustering step,
circled with a dash-lined rectangle in Figure 3.1a.
3.2.2 Overview of the Acceleration Techniques
Our acceleration techniques consist of three stages: reuse-based filtering, center reuse, and a two-
phase design. The first two materialize the idea of reuse-centric k-means configuration, which saves
computations in the configuration process through promoting the reuse of computation results from
the trials of some earlier configurations. The last technique uses a two-phase design to first quickly
get an estimated surface of classification errors, and then uses it to help focus the explorations on
valuable configurations. The first two are generally applicable for all k-means–based data mining
tasks, while the last one is especially useful when a detailed relation between configurations and
the final results of the application (e.g., classification accuracy) is needed.
The techniques work at different aspects of the problem and can function in synergy. The
dash-lined boxes in Figure 3.1b illustrate the scopes they each work on.
Reuse-based filtering reuses the clusters obtained in the trial of one configuration (with feature
set S and k value) to speed up the first iteration of k-means in a later trial of some other configuration.
It concentrates on the first iteration of k-means because in modern k-means (e.g., Yinyang K-
means [Din15b]), the later iterations are already highly optimized, and each takes a much shorter
time than the first iteration does. For instance, in our experiments with nine datasets of different
sizes and dimensions (Listed in Table 3.1), the first iteration of Yinyang K-means takes 10-40% of
the entire k-means time.
16

Center reuse sets good initial centers for k-means by leveraging the centers from earlier trials. It
works across all three levels: across the iterations in feature selection, iterations of k value exploration,
and cross-validations. It significantly helps shorten the time for k-means to converge in the algorithm
configuration.
The two-phase design aims at reducing the number of configurations to explore for each set of
features. It hence contributes to the computational savings within, rather than across the explo-
rations of a given set of feature.
Reuse-based filtering and the two-phase design do not alter the clustering results. Center reuse
could lead to clustering results different from the ones attained by using random centers. However,
later in Section 3.3.4, we will show that the influence causes negligible impact on the results of
algorithm configurations.
We next explain each of the three techniques in detail.
3.2.3 Reuse-Based Filtering
K-means is time consuming primarily because of its calculations of the distances from data points to
potential cluster centers. In the standard k-means, each iteration needs to compute n ×k distances
(n is the number of points, k is the number of cluster centers), from every data point to every cluster
center in order to identify which cluster center is the closest to the data point. Modern k-means
algorithms (e.g., Yingyang k-means [Din15b]) successfully avoid many distance calculations in later
iterations of a k-means, but they all still need the n ×k distance calculations in the first iteration
of k-means. In our experiments, we observe that the first iteration weights up to 40% of the entire
k-means time. We call it the first iteration problem. Algorithm configuration of k-means needs many
runs of k-means; every one of them suffers from the first iteration problem.
To alleviate the issue, we propose reuse-based filtering. It is based on the well-known geometric
property of Triangle Inequality (TI).
3.2.3.1 TI and Its Prior Use for K-Means
We provide the formal definition of TI and landmark as follows.
Theorem 3.2.1. Triangle Inequality (TI): Let q , p , L be three points in a metric space (e.g. Euclidean
space) and d (x , y ) be the distance between the any two points x , y in the space. Triangle Inequality
states that d (q , p )≤ d (q , L ) +d (p , L ). Point L is called a landmark.
TI has been used by previous work [Din15b; Dra12; Ham10; Elk03] to avoid unnecessary distance
calculations in k-means, except for its first iteration. The basic idea in those works is to use the
cluster centers in the previous iteration as landmarks to help quickly attain the lower bounds and
upper bounds between each data point and the new centers in the current iteration. If the lower
bound between a point x and a center c is even larger than the upper bound between x and its
so-far nearest center b (x ) (in this current iteration), there is no need to calculate d (x , c ). Figure 3.2
17

Figure 3.2: Illustration of how upper bound and lower bound can help avoid distance computationto some center c . Circles and double circles represent centers in current and previous iterationrespectively, and b (x ) is the so-far nearest center of point x .
illustrates this procedure. The idea has not been applied to the first iteration of k-means because
there is no previous iteration that it can leverage.
3.2.3.2 Basic Idea of Reuse-Based Filtering
Our reuse-based filtering is inspired by the prior use of TI in k-means. Its basic approach is to
leverage the results from the exploration of an earlier configuration to help produce the lower/upper
bounds of distances for the exploration of later configurations, whereby, TI can then be applied to
identify and avoid the unnecessary distance computations.
The nature of algorithm configuration poses several special challenges for materializing the idea
that do not appear in the prior use of TI for accelerating a single run of k-means.
• In different iterations of a single k-means, distances are all based on the same set of data fea-
tures, and the number of cluster centers is also identical. But in algorithm configuration, these
factors could all differ in the exploration of different configurations. That causes complexities
in how to reuse distances, and how to effectively define landmarks.
• How to ensure that the acceleration to the first iteration does not interfere with the acceleration
of the later iterations of k-means. When modern k-means algorithms apply TI to later iterations
to avoid unnecessary distance calculations, they leverage the n ×k distances from the first
iteration to help attain some tight distance bounds for TI to work effectively [Din15b; Dra12;
Ham10; Elk03]. If reuse-based filtering avoids computing many of the distances in the first
iteration, it could pose risks for the acceleration of the later iterations to work properly.
We next explain how our design of reuse-based filtering, and how the design addresses the two
special concerns.
3.2.3.3 Detailed Design of Reuse-Based Filtering
We explain the design of reuse-based filtering in two levels: across k and across feature sets.
18

Figure 3.3: Illustration of how the configuration with k = k1 can help save distance computation inthe first iteration of another configuration with k = k2. b ′(x ) is the closest center of point x whenk = k1; c1, c2, c3 are the initial centers and b (x ) is the so-far nearest center of point x when k = k2.
Reuse across k . This reuse happens among the configurations that share the same set of features,
with different k values. Suppose that the reuse is from one configuration with k = k1 to another with
k = k2. Compared to the previous usage of triangle inequality to eliminate unnecessary distance
computations, as shown in Figure 3.2, we cannot build that one-to-one previous-center relationship
between two configurations with different k . Instead, we could use the closest center b ′(x ) for each
point x in the configuration with k = k1 as the landmark for all the initial centers in the configuration
with k = k2. Figure 3.3 provides the illustration. Note that the distance from x to b ′(x ) can be directly
reused from the trial with k = k1, the only extra distance computations we need to carry out are
those from the centers in k = k1 to the initial centers in k = k2. In total, there are k1×k2 distance
computations, which is negligible in comparison to the cost of distance computations from every
point to every center (i.e. n ×k2), where n is the total number of points. Similarly to the previous
usage of triangle inequality [Din15b; Elk03], this optimization does not change the final cluster
results, as distance computations to some center c will be eliminated only when c can not be the
closest center to the point x .
Reuse across feature sets. This reuse happens among the configurations that have the same
number of clusters k , but use different sets of features. As our optimization is based on triangle
inequality, which requires the distance to be defined in the same metric space, we need to be con-
servative about distance reuses across different feature sets. Before we give the detailed explanation
about how reuse across feature sets is applied, we first introduce a theorem on distances defined in
two different, but highly related, metric spaces.
Theorem 3.2.2. For any two pairs of points (x F1 , c F1 ) and (x F2 , c F2 ), where x F1 and c F1 are in feature
space F1 with the feature set S1, while x F2 and c F2 are in feature space F2 with the feature set S2. If
x F2 and c F2 have only a subset dimensions of x F1 and c F1 respectively, i.e., S2 ⊂ S1, then the distance
between x F2 and c F2 must be no larger that between x F1 and c F1 in any p-norm space. That is to say,
d (x F2 , c F2 )≤ d (x F1 , c F1 ).
19

Figure 3.4: Illustration of how the configuration with F1 can help save distance computation in thefirst iteration of another configuration with F2, where b ′(x ) is computed from the closest center ofpoint x in feature space F1, while c1, c2, ... ck2
and b (x ) are the initial centers and the so-far nearestcenter of point x in feature space F2 respectively.
The theorem directly follows the distance definition in any p-norm space, in that the distance
function monotonically increases with the number of dimensions.
For distance reuse across feature sets, a distance computed in feature space F1 can be used for
bound computations in feature space F2 without affecting the final clustering result as long as S2
is a subset of S1. In particular, for each center c ′F1 obtained in feature space F1, we remove those
dimensions that are not used in F2 to build a corresponding center c ′F2 in feature space F2.
Figure 3.4 gives the illustration of how distance reuse can help eliminate unnecessary distance
computations to some center c across feature sets. Compared to the reuse across k shown in
Figure 3.3, our lower bound computation directly uses d (x F1 , b ′F1 (x )) calculated in feature space F1,
which themselves are the upper bounds of d (x , b ′(x )) in feature space F2. These bound computations
are a simple extension of the traditional triangle inequality, and as a consequence, our method will
remove the distance computation to some center c , only if it is impossible to be the closest center
to the point x .
Further, our accelerations based on both reuse across k and reuse across feature space can easily
be combined with previous accelerations focusing on the later iterations of k-means [Din15b; Elk03].
Instead of using the exact distance results for bound computation as shown in Figure 3.2, we can
easily replace the exact distance with corresponding bounds obtained in our optimized first iteration.
Although our optimization may theoretically affect the efficiency of the optimization applied in the
later iteration of k-means, our empirical experience shows that these two accelerations are mostly
orthogonal to each other. (Details in Section 3.3.5.3.)
3.2.4 Center Reuse
The second technique we propose for accelerating configuration of k-means is called center reuse.
The idea is simple. As is well known, the convergence speed of k-means is highly sensitive to the qual-
20

ity of the initial centers. Some initial centers can make k-means converge in much fewer iterations
than others. The basic idea of center reuse is to use the cluster centers attained in the exploration of
some earlier configuration as the initial centers for the explorations of later configurations.
Center reuse is based on the following hypothesis:
Hypothesis 3.2.3. In algorithmic configuration, effectively using centers from an earlier run of k-
means to initialize later runs of k-means could shorten the convergence process while causing negligi-
ble effects on the result of the algorithm configuration.
Specifically, we consider center reuse in three scenarios, corresponding to the different levels of
the explorations of k-means configurations shown in Figure 3.1b.
Reuse across validations. This reuse is among the different folds in cross validations in the
exploration of a certain configuration. As aforementioned, recall that when exploring a given k
and a set of input features, cross-validation is often used to examine the quality of the final results
when that configuration is used. Take k-means–based classification as an example: cross-validation
computes the errors of the classifier produced through k-means in that configuration. A V -fold cross
validation builds V classifiers with each on a slightly different training dataset. The center reuse at
this level is to use the cluster centers attained during the training of the first of the V classifiers as
the initial centers for the k-means in the constructions of the other V −1 classifiers.
Reuse across k . This reuse happens among the configurations that share the same set of features,
but different k values. Because of the difference in k , the centers may not be directly reusable. Our
empirical investigation shows that the problem can be handled through a simple design. Suppose
that the reuse is from one configuration with k = k1 to another with k = k2. If k2 > k1, in addition to
using the centers attained in exploring the earlier configuration, we add k2−k1 randomly generated
centers as needed. If k2 < k1, we cluster the k1 centers into k2 groups and then take the group centers
as the initial centers for the exploration of the latter configuration. Figure 3.5 illustrates this case.
Reuse across feature sets. This reuse happens among the configurations that use different sets
of features. Suppose that the reuse is from configuration C1 with feature set S1 to configuration C2
with feature set S2. The differences in the feature sets make direct center reuse difficult. Our design
is to reuse the values of overlapped features between S1 and S2, and generate the values of the other
features of S2 (if there are any). Our experiments show that the generation can be as simple as using
the mean value of each feature.
When two configurations differ in both k and feature sets, center reuse first applies the reuse
across feature sets to handle the dimension differences in the features, and then applies the reuse
across k to set the initial cluster centers.
Our empirical investigation shows that center reuse is beneficial for accelerating k-means
configuration—that is, Hypothesis 3.2.3 holds—when the following principles are followed:
• Reuse cross validations should be always applied. Even though the training datasets of different
validations differ, the datasets come from the same source and share the same distributions.
21

Figure 3.5: Illustration of center reuse across k . The two graphs represent the k-means on twoconfigurations with k equaling three (left) and two (right) respectively. The double circles in the leftgraph show the three centers attained in the exploration of that configuration. These centers aregrouped to get two group centers c ′1, c ′2, which are then used as the initial centers (marked as circlesin the right picture) for exploring the latter configuration.
Their cluster centers are hence similar. The reuse can always shorten the convergence process
significantly.
• Reuse across k can be applied to either direction: from a smaller k to a larger one or from a
larger k to a smaller one. In the case of increasing k values, as the extra centers are added
randomly, the complexity is the same compared with the random initialization. In the case
of decreasing k values, we group centers to get initial centers using k-means with only one
iteration. The overhead is also negligible. Even if the two k values differ a lot, center reuse-
based initialization degrades to random initialization and won’t bring extra costs. Specifically,
in our experiments, we notice that center-reuse always give substantial benefits even when
the two k values differ up to 25% of the maximum k value (e.g. the difference is 200 and the
maximum k is 1000). Thus, reuse across k can always be applied.
• Reuse across feature sets are applied to a different set of features. Since we randomly generate
the values for dimensions that are not overlapped between the two feature sets, reuse across
feature sets degrades to random initialization in the worse case (i.e., two features sets are
completely different). If PCA-based step-wise feature selection is used, there is always overlap
between two features sets. Thus reuse across feature sets can always be applied. We observed
that reuse across feature sets can give substantial benefits even when the two features sets
differ in 15% of the maximum dimension (e.g. the difference is 8 and the maximum dimension
is 60).
Section 3.3 will provide the details of our empirical experiments on the effectiveness of center
reuse in saving computations, and on the effects it has on the quality of k-means configuration.
3.2.5 Two-Phase Design
The two techniques presented so far form the basis for our reuse-centric k-means configuration. In
this part, we introduce another complementary technique named two-phase design.
22

0 200 400 600 800 1000k
0.1
0.2
0.3
0.4
0.5
class
ifica
tion
erro
r
elbow
Defaultkl:70, kr:490
Figure 3.6: An example of an error curve and the illustration of curve segmentation.
This technique is particularly useful when the error surface of the target application is desired.
For k-means–based classification, for instance, the error surface indicates how the classification
error changes when k and feature sets change. The surface is composed of a set of error curves, with
each corresponding to one set of input features. The black curve in Figure 3.6 illustrates such an
error curve when a particular feature set is considered while k changes.
The error surface is useful when the criterion for the best configuration varies. For instance,
k-means–based classifier tends to give a higher classification accuracy when k gets larger. But at the
same time, the classification time also gets longer. In some situations, a user may want different
trade-offs between the accuracy and the time in different scenarios. Having the error surface in
hand can help meet the needs without rerunning the algorithm configuration every time the desired
trade-off changes.
The two-phase design is based on the observation that some points on an error surface more
critically affect the accuracy of the error surface than some other points do. For instance, on the
curve shown in Figure 3.6, the parts outside the elbow area are close to straight lines, and are hence
easy to approximate through curve interpolation on only several sampling points, but the elbow area
is more subtle in shape, and would require more sampling points to get a reasonable interpolation
result. Meanwhile, the elbow point is often selected as the desired configuration for its good balance
between the increase of time overhead and the decrease of classification errors.
The idea of the two-phase design is to first quickly obtain an estimated shape of the error surface,
based on which, it then conducts a focused exploration of the configurations (e.g., those fall into the
elbow area) that are most important for the accuracy of the final error surface. The two phases in the
design happen during the exploration of each given set of input features. To ease the understanding,
we explain the technique and how it works by drawing on k-means–based classification as an
example use of k-means.
The first phase in the design, specifically, tries to quickly get the approximate classification errors
at a small number of sampled k values. It employs both the reuse-based filtering and center reuse
for speed. At the same time, it adopts two approximation methods. The first is to use only the first
fold of cross-validation; the second is to replace k-means clustering with only a one-step clustering.
23

0 200 400 600 800 1000k
0.1
0.2
0.3
0.4
0.5cla
ssifi
catio
n er
ror Default
FirstPhase
(a) sensorless
0 200 400 600 800 1000k
0.18
0.19
0.20
0.21
class
ifica
tion
erro
r DefaultFirstPhase
(b) adult
Figure 3.7: Approximated classification error curves from the first phase for two datasets.
The one-step clustering assigns points to clusters based on their distances to the centers produced
from our center reuse scheme; no center updates or point reassignments are done. The rationale of
our first phase approximation method comes from the statistical similarity across different folds of
a dataset, and the reasonable quality of the cluster centers produced from the center reuse.
These two approximation methods could incur some deviation from the exact classification
errors, but as we observed, their Pearson correlation coefficient with the errors from Yinyang k-mean
are always higher than 0.95 for all datasets we tested. Figure 3.7 shows approximated classification
error curves from the first phase for two example datasets with ten k values sampled from the range
[20, 1010]. “Default” here refers to the default k-means with random initialization while “FirstPhase”
refers to our first phase approximation method. Even though the errors from the the first phase are
higher than the errors from standard k-means, the trends of the error curves are well approximated.
Based on that shape of curve, the second phase identifies the critical sections (i.e., the elbow
section) of the curve and selects some important configurations to conduct more focused and
detailed explorations to subsequently get the precise accuracy at those points. Through interpolation
across those points, it finally obtains the error curve. Compared to uniform sampling, this two-phase
design allows better error curves to be attained with detailed explorations of fewer configurations.
Two notes are worth making about the second phase. The first is how to identify the critical
sections. We call it also curve segmentation. Given the range of k , [kmi n , kma x ], the way we segment
the curve and do non-uniform sampling is as follows:
1. Find the elbow point on the curve. ke l b o w is the corresponding k value;
2. For the two sub-ranges [kmi n , ke l b o w ] and [ke l b o w , kma x ], find the elbow point for each partial
curve in the range. The corresponding k values are kl and kr ;
3. Then the range is split into three parts: [kmi n , kl ], [kl , kr ], and [kr , kma x ]. Different stepsizes
can be used when exploring the three sub-ranges.
24

Let s1, s2 and s3 be the stepsize for sampling the range [kmi n , kl ], [kl , kr ], and [kr , kma x ] respec-
tively. We set the step sizes of the sampling as follows:
s2 =m2(kl −kmi n ) +m1m2(kr −kl ) +m1(kma x −kr )
m1m2(nk −1), (3.1)
s1 =m1s2, (3.2)
s3 =m2s2, (3.3)
where nk is the total number of k values to sample, while m1 and m2 are parameters determining
the degree of discrimination in sampling to the different segments; we set them to 0.5 and 2.
The second note is about elbow point detection. While the notation of elbow points is well-
known, there are no broadly accepted definitions. Various techniques [Zha08; Sat11] have been
proposed to detect the knee point of a curve. We adopt a lightweight approach similar to [Sat11].
The idea is to draw a line from the first to the last point of the curve, and then find the data point
that is farthest away from that line. The dots on the curve in Figure 3.6 illustrates the boundaries of
the curve segments obtained through the method.
3.3 Evaluations
We conduct a series of experiments to evaluate the proposed techniques. Specifically, we focus on
the following questions:
• Q1: How much computation can the optimizations save? How much can they speed up k-
means configuration, in both sequential and parallel settings?
• Q2: Do the optimizations degrade the configuration results?
• Q3: How are the benefits affected by dataset attributes and problem settings (e.g., k , data
dimensions, landmarks)?
• Q4: How to deploy the optimizations (e.g., reuse from smaller k or from larger k, smaller feature
sets or larger feature sets) to maximize the benefits?
This section answers the first question by reporting the overall computation savings and
speedups brought by the techniques in § 3.3.2 and § 3.3.3, answers the second question in § 3.3.4,
answers the third and fourth ones through some sensitivity studies in § 3.3.5.
3.3.1 Methodology
Our experiments use k-means–based classification as a concrete usage scenario of k-means config-
urations. It is worth noting that the techniques are general, applicable to other usage of k-means.
All the experiments run on an HPE Apollo 2000 server with two Intel Haswell CPUs (14 cores/CPU,
2.3-3.3GHz) and 128GB RAM. We use nine large, real-world data sets taken from the UCI machine
25

Table 3.1: Data statistics.
Dataset size(B) n #attr #c #d d s t e p k s t e p
gamma 1.2e6 1.9e4 10 2 8 1 10sensorless 4.4e6 5.8e4 49 11 10 1 10credit [Yeh09] 3.0e6 3.0e4 24 2 13 1 10gassensor [Hue16] 1.7e6 1.4e4 11 2 16 1 10miniboone 3.4e7 1.3e5 50 2 34 2 20adult 2.0e7 4.5e4 14 2 59 2 10connect 3.1e7 6.8e4 42 2 61 2 10activity [Ang13] 1.1e7 1.0e5 561 6 157 8 10census 2.0e8 1.4e5 68 2 186 8 20
learning repository [Asu07]. The statistics of the datasets including data size (size), the number of
instances (n), the number of attributes (#attr) and the number of classes (#c) are listed in Table
3.1. We used PCA as the feature projection method to extract features from attributes and adopted
the step-wise feature selection method to select feature sets. We retained a maximum number of
components that cumulatively explain 99% of variation. The minimum number of dimensions
is two. The overall range of feature dimensions to consider in the configuration explorations is
shown in the “#d” column. “d s t e p ” and “k s t e p ” columns show the default step size to increase
or decrease the dimension and the number of clusters respectively.
Yinyang k-means [Din15b] is used in the baseline implementations of the algorithm configura-
tion to minimize time. Yinyang k-means is one of the state-of-the-art algorithms proposed by Ding
and others recently. The algorithm filters unnecessary distance calculations by using continuously
maintained lower bounds on the distances of each point to the cluster centers as well as an upper
bound to the cluster center to which it was assigned. Even though the bounds yield a significant
speedup compared to the standard k-means (over 9X on average) [Din15b], the algorithm needs
to compute one full iteration of k-means to initialize bounds in the beginning, which requires the
computation of all distances to the centers.
K-means++ [Art07] is a commonly used initialization method for better approximation to
the optimal k-means solution (i.e., minimizing the within-cluster sum of squares). However, our
experiment shows that for configuring k-means–based data classification, it does not outperform
random-based center initialization in either the speed or the quality of the produced classifier.
Random initialization is hence used in our baseline.
Euclidean distance is used in all the experiments as selections of various distance metrics are
not a focus of this work. Our acceleration techniques apply to various metric spaces, except that
cross-feature reuse-based filtering requires p-norm spaces as stated in Theorem 3.2.2.
3.3.2 Speedups on Heuristic Search
This part reports the speedups brought to the k-means configuration process by our reuse-based fil-
tering and center reuse. Algorithm configurations typically employ some heuristic search algorithms
26

Table 3.2: Speedups on stochastic hill climbing.
Dataset time(s)*reuse-basedfiltering
center reuseacrossvalidations
across k andfeature sets
gamma 2808.1 3.09 3.58 2.05sensorless 10730.6 3.22 3.40 1.73credit 5713.5 3.30 4.05 2.04gassensor 1901.9 4.37 4.39 2.33miniboone 56636.8 1.56 3.73 1.83adult 9904.4 4.30 5.80 2.18connect 23621.7 1.54 4.42 1.63activity 6569.6 1.11 2.76 1.91census 79872.7 2.30 4.14 1.68
* time(s) refers to k-means clustering time in seconds for all 200 configurations without our opti-mizations.
to explore the configuration space. Our optimizations are largely orthogonal to what search algo-
rithms are used. Our experiments use stochastic hill climbing. Hill climbing is an iterative algorithm
that starts with an arbitrary solution and then attempts to find a better solution by changing the
solution in some way. If the change produces a better solution, then it is taken as the new solution.
Otherwise, a new change is examined. The process is repeated until no further improvements can
be found or some stopping criterion is met. Stochastic hill climbing makes the change at random.
The tuning objective is set to consider both the classification accuracy and the response time
of the built classifier. Specifically, it is to find the smallest k (hence giving the fastest classification
response) that can achieve a classification accuracy over a given threshold (90%). The stopping
criterion is that the maximum number of configurations (200) is tested. The baseline method repeats
the following process until it meets the stop criterion:
1. Choose the number of dimensions d and the number of clusters k from the search space
randomly;
2. Run k-means–based classification with the specified configuration and get the average classi-
fication error through 10-fold cross-validation;
3. If the average classification error reaches a predefined error threshold and the k value is
smaller than that in the current best configuration, then take it as the current best solution.
Our computation reuse techniques accelerate the second step. Each randomly generated con-
figuration could have different d and/or k than what a previous trial uses. We design the following
reuse strategy to select a historic trial for computation reuse:
• If there are previous trials of k-means that use the same d as the current one, then we reuse
the distances from the trial with the largest k for reuse-based filtering and the cluster centers
from the trial with the nearest k for center reuse.
27

Table 3.3: Speedups on the attainment of error surfaces.
DatasetSpeedup by Computation Reuse (#k=32) Percentage of k Saving Overall Speedupreuse-based filtering center reuse two-phase design
#k=8 #k=16 #k=32accross k
acrossfeature sets
acrossvalidataions
across kacrossfeature sets
#k=8 #k=16 #k=32
gamma 3.42 3.12 4.81 2.78 1.44 11.51% 29.52% 16.81% 4.57 6.30 5.70sensorless 3.61 3.80 4.50 2.37 1.59 21.41% 31.00% 24.21% 5.34 6.73 6.94credit 3.65 3.70 5.31 2.81 1.82 6.69% 23.82% 15.09% 4.98 6.64 6.77gassensor 4.31 4.34 5.75 3.32 3.19 26.54% 38.77% 11.95% 6.54 8.59 6.74miniboone 1.91 1.97 4.56 2.57 2.02 3.85% 49.24% 48.98% 4.50 8.24 9.17adult 4.65 5.05 6.43 3.86 3.88 12.99% 24.64% 22.71% 6.76 8.27 9.07connect 1.59 1.74 4.13 2.91 2.28 11.19% 13.88% 5.89% 4.58 5.07 4.98activity 1.21 1.23 2.77 1.84 2.07 15.25% 17.36% 13.79% 3.02 3.49 3.34census 2.71 2.78 4.89 2.63 2.61 16.57% 33.12% 28.91% 5.34 7.32 7.64
• Otherwise, we reuse the distances from the trial whose d is larger but has the least difference
than the current one for reuse-based filtering and the cluster centers from the trial with the
least difference on d (can be smaller or larger) for center reuse.
To enable the above reuse strategy, the cluster centers from previous trials of k-means in the first
fold of cross-validation have to be stored. Also, the point-to-center distances from previous trials of
k-means needs to be updated whenever a configuration with a larger k and the same d is tested.
The speedups from each technique are listed in Table 3.2. For reuse-based filtering, we observe
that it has only minor effects on the speeds of the later iterations of Yinyang k-means (Details in
Section 3.3.5.3). So we report the speedup of reuse-based filtering for the first iteration. The speedup
comes from the distance computation saved by TI-based filtering. Center reuse affects the entire
k-means clustering and thus has the dominant influence on the overall speedup. It confirms that
our simple design for center reuse across k and features sets works well. The next subsection reports
the overall effects when all the techniques are used together in attaining error surfaces.
3.3.3 Speedups on the Attainment of Error Surfaces
Our second experiment studies the benefits of our techniques on the attainment of classification
error surfaces. As Section 3.2.5 has mentioned, error surfaces capture the relations between config-
urations and the errors of the corresponding classifiers. They could be helpful when the criterion
for the best configuration varies. In this experiment, we apply all three techniques that Section 3.2
proposes to accelerate the attainment of the error surfaces.
Uniform search of the configuration space is a simple but frequently used method to attain error
surfaces. It is used in the baseline implementation. Uniform search evaluates every combination of
all the d values and several uniformly sampled k values.
Our proposed method is to use two-phase design to reduce the number of k to be evaluated
for building a classification error curve. Computation reuse techniques are applied to save the
clustering time for each sampled configuration. Since the configurations for uniform search to be
28

tested are already known, our method starts with the largest d and the largest k and apply reuse to
smaller d values and k values.
We first apply all the three techniques to speed up sequential uniform search, and then apply
them to parallel uniform search on the 28-core parallel machine.
3.3.3.1 Sequential
In this setting, only one thread is used for the configuration process. The range of dimensions to
search is listed in Table 3.1 and the range of k values is [20,1010]. The number of sampled k is
8, 16, 32.
The speedups from all three techniques are listed in Table 3.3. With our two-phase design, we
could reduce the number of k to be evaluated for recovering the error curve without affecting the
benefits from the computation reuse. As a consequence, the overall speedup is up to 9.17X.
The overall speedup on the dataset activity is not as high as on the other datasets. Specifically,
the dominated acceleration factor, center reuse across validations, produces a smaller speedup
compared with that on the other datasets. In contrast, the results from the dataset census, which has
the same large dimensions but about 14 times larger data size, shows much larger speedups for reuse-
based filtering and center reuse across all three levels. This is because when a dataset is relatively
small but has a large size of feature sets, training sets are likely to follow different distributions and
thus the centers resulting from one fold of training set is not as good for another fold of training set.
3.3.3.2 Parallel
The parallel results are interesting to examine because our techniques, especially the computation
reuses, bring data dependences to the exploration of different configurations: for a configuration to
reuse results from another, it has to wait for the results to be produced. They hence could hamper
the parallel search.
Table 3.4 presents results of our algorithms in parallel settings when the two computation reuse
techniques are applied. In order to run our algorithms in parallel, some dependencies incurred
by the computation reuse have to be removed. When scheduling the task to each thread, we use
the following strategy to break dependencies: if the number of threads supported is no larger than
the number of feature sets to be evaluated, then only remove dependencies caused by reuse across
feature sets. Each thread examines a subset of feature sets and the entire sampled k values. The larger
the dimension is, the longer the k-means clustering time is. To balance the workload among the
threads, we assign each thread feature sets in an alternating manner. For example, if the dimensions
are from two to five and the number of threads is two, then the first thread runs dimensions two and
four while the second thread runs dimensions three and five. When the thread supported is larger
than the number of feature sets, some dependencies caused by reuse across k are also removed.
As shown in Table 3.4, we have good speedups with various numbers of threads and numbers
of sampled k . The larger the number of sampled k is, the larger the speedup is. This is because we
have a larger ratio of reusable distance computation for a larger set of sampled k .
29

Table 3.4: Speedup in parallel settings.
Dataset #threadsSpeedup#k=5 #k=10 #k=20 #k=30
gamma
24816
3.663.593.262.91
4.064.133.703.18
4.534.354.133.23
4.604.524.193.29
sensorless
24816
3.852.231.691.40
4.233.163.723.46
4.334.083.843.84
4.584.584.023.67
credit
24816
3.733.963.713.69
4.014.494.404.02
4.774.894.604.30
5.125.084.884.75
gassensor
24816
4.324.273.692.55
4.874.694.473.95
5.265.024.664.06
5.425.634.904.75
miniboone
24816
3.923.863.703.97
4.124.143.874.29
4.384.164.224.54
4.574.274.224.71
adult
24816
5.655.484.872.41
6.015.325.643.06
6.455.986.065.77
6.686.676.315.94
connect
24816
4.014.013.783.68
4.114.244.003.68
4.344.394.314.15
4.404.514.343.13
activity
24816
2.372.322.152.15
2.452.422.242.27
2.582.512.392.44
2.642.582.422.50
30

0 200 400 600 800 1000k
0.1
0.2
0.3cla
ssifi
catio
n er
ror Default
CtrReuse
(a) sensorless
0 200 400 600 800 1000k
0.175
0.180
0.185
0.190
0.195
class
ifica
tion
erro
r DefaultCtrReuse
(b) adult
Figure 3.8: Classification error curves for two datasets.
3.3.4 Quality Influence of Center Reuse
Recall that among all the three optimizations we introduce, only center reuse might affect the quality
of the resulting classifiers due to the sensitivity of k-means on initial centers. In this part, we provide
the details of our empirical measurements of the effects of center reuse on the quality of both
classification and clustering results.
Since k-means is sensitive to initialization, we perform 100 runs of k-means–based classification
with different random seeds for each configuration. The classification error is averaged over the 100
runs. The metrics we use to measure the discrepancy between the error curve from the baseline
and that from our center-reuse based technique are Mean Absolute Error (MAE) and Mean Percent
Error (MPE).
Given a list of values [a1, a2, ..., an ] and its approximation [a1, · · · , an ], MAE and MPE are defined
as follows:
MAE=
∑ni=1 |ai − ai |
n(3.4)
MPE= 100%×∑n
i=1 |(ai − ai )/ai |n
(3.5)
For the datasets in Table 3.1, the range of MAE is from 2.67E −04 to 1.75E −03 and the range
of MPE is from 0.15% to 2.63%. Figure 3.8 shows the classification error curves from two datasets.
“Default” here refers to the Yinyang k-means with random initialization while “CtrReuse” refers to
the Yinyang k-means with center-reuse initialization. Even though center reuse yields a different
error curve, the MAE is lower than 0.002 and the MPE is lower than 3%, indicating the little influence
of center reuse on classification quality.
We also validated the minor influence of center reuse on clustering quality through traditional
internal metrics including Davies-Bouldin index [Dav79], Dunn index [Dun74], and Silhouette
coefficient [Rou87]. Since the objective of k-means is to minimize the within-cluster sum of squares
31

(WCSS), we also included WCSS as a metric. We used Pearson correlation coefficient (PCC) to
measure the correlation of k -metric value curves with center-reuse initialization and those with
random initialization. For the datasets in Table 3.1, the PCCs are higher than 0.969 for all the indexes
and higher than 0.9997 for WCSS. The MPE for all the indexes and WCSS are mostly within 5%. The
results indicate that center reuse also has negligible influence on clustering quality.
3.3.5 Sensitivity Analysis and Insights
Experiments on heuristic search and the attainment of error surfaces have shown the efficacy of our
acceleration techniques. To better take advantage of reuse-based optimization, we provide some
insights by answering the following questions:
• For center reuse across k , should we reuse centers resulting from a smaller k or a larger k ?
• For center reuse across feature sets, should we reuse centers resulting from a smaller feature
set or a larger feature set?
• For reuse-based filtering, how does the number of landmarks affect the speedup? How does
the optimization affect later iterations of k-means? How is the speedup related with k and the
size of feature sets?
We next answer the questions in detail. We report the detailed measurements with four representa-
tives of all the datasets.
3.3.5.1 Insights for Center Reuse across k
To compare the speedup of reusing centers from a smaller k with that from a larger k , we compare
two methods: CtrReuseK-inc, which uses k centers to initialize k + k s t e p centers by randomly
adding k s t e p centers, and CtrReuseK-dec, which uses k centers to initialize k −k s t e p centers by
merging centers through one iteration of k-means. The range of k values is 20 to 1020. The d s t e p
is one. The baseline method is the default method for k-means configuration.
Experiment results show that center reuse by merging centers from a larger k generally gives
larger speedups than that by randomly adding centers from a smaller k . Figures 3.9a and 3.9b
show the detailed results on datasets adult and connect: CtrReuseK-dec gives much larger speedups
than CtrReuseK-inc especially when the dimensions are larger than eight. It is worth noting that
because CtrReuseK-dec starts from the largest k , it has a longer startup time. However, its larger
speedups on other k values lead to much shorter overall configuration time. It is confirmed by the
accumulated time of the configuration process as Figures 9c-f show with dimensions 10 and 58.
Table 3.5 shows the speedups of center reuse across k with different step size. Because decreasing
k gives better speedups, we listed only speedups from the method CenterReuseK-dec except for
the column ‘10‘, where the speedups from CenterReuseK-inc are listed in parentheses. According
to the table, the larger the k s t e p , the smaller the speedup. When the k s t e p is less than 500,
32

0 20 40 60dim
2.75
3.00
3.25
3.50
3.75
4.00
spee
dup
(X)
CtrReuseK-incCtrReuseK-dec
(a) adult: overall speedups.
0 20 40 60dim
3
4
5
6
spee
dup
(X)
CtrReuseK-incCtrReuseK-dec
(b) connect: overall speedups.
0 200 400 600 800 1000k
0
50
100
150
200
250
time
(s)
DefaultCtrReuseK-incCtrReuseK-dec
(c) adult: acc. time (d i m=10).
0 200 400 600 800 1000k
0
200
400
600
time
(s)
DefaultCtrReuseK-incCtrReuseK-dec
(d) connect: acc. time (d i m=10).
0 200 400 600 800 1000k
0
200
400
600
800
time
(s)
DefaultCtrReuseK-incCtrReuseK-dec
(e) adult: acc. time (d i m=58).
0 200 400 600 800 1000k
0200400600800
10001200
time
(s)
DefaultCtrReuseK-incCtrReuseK-dec
(f) connect: acc. time (d i m=58).
Figure 3.9: Center reuse across k with inc/dec k on dataset connect. acc. is short for accumulated.
33

Table 3.5: Speedups of center reuse across k with different k s t e p .
k s t e p 10 20 50 100 200 500
sensorless 4.11(3.96) 3.08 1.88 1.71 1.72 1.13miniboone 4.31(4.06) 3.22 2.20 1.68 1.32 1.15adult 4.26(3.85) 3.10 2.13 2.06 1.46 1.23connect 4.95(4.20) 3.49 2.26 1.93 1.56 1.16
0 200 400 600 800 1000k
2.4
2.6
2.8
3.0
spee
dup
(X)
CtrReuseDim-incCtrReuseDim-dec
(a) adult: overall speedups.
0 10 20 30 40 50 60dim
0200400600800
100012001400
time
(s)
DefaultCtrReuseDim-incCtrReuseDim-dec
(b) adult: accumulated time.
0 200 400 600 800 1000k
1.8
2.0
2.2
2.4
2.6
2.8
spee
dup
(X)
CtrReuseDim-incCtrReuseDim-dec
(c) connect: overall speedups.
0 10 20 30 40 50 60dim
0500
1000150020002500300035004000
time
(s)
DefaultCtrReuseDim-incCtrReuseDim-dec
(d) connect: accumulated time.
Figure 3.10: Center reuse across feature sets with inc/dec d .
which means the change is less than 50% of the maximum k value, center reuse gives significant
speedups.
3.3.5.2 Insights for Center Reuse across Feature Sets
We conduct similar experiments to examine the influence of reuse directions across feature sets.
We use CtrReuseDim-inc and CtrReuseDim-dec for the increasing and decreasing directions, and
d s t e p for the step size. CtrReuseDim-inc fills extra dimensions with the mean value of each di-
mension, and CtrReuseDim-dec just removes the extra dimensions. The range of k values is from
20 to 1020 and k s t e p is 200. The range of d values is from 2 to 59 and d s t e p is one. The baseline
method is the default method.
Experiment results show that center reuse by removing dimensions from centers with a larger
d generally performs better than center reuse by adding dimensions to centers a smaller k . Fig-
ure 3.10 shows the detailed results on datasets adult and connect.
34

Table 3.6: Speedups of center reuse across k with different d s t e p .
d s t e p 1 2 4 8 16 32
sensorless 1.82(1.26) 1.14 1.03 1.0 - -adult 2.62(2.36) 2.10 1.67 1.31 1.22 1.07connect 2.43(1.94) 2.15 2.06 1.27 1.08 1.01activity 4.19(3.32) 3.36 2.70 2.20 1.62 1.28
Table 3.7: Speedups and distance savings for the first iteration of k-means with reuse-based filteringacross k .
#landmarks 200 500 1000 2000 3000 4000 5000
sensorless 2.77(89.7%) 3.07(92.5%) 3.20(93.4%) 3.14(92.9%) 3.06(91.5%) 2.95(90.1%) 2.71(85.3%)miniboone 1.26(50.5%) 1.29(54.8%) 1.37(57.6%) 1.39(60.0%) 1.41(61.1%) 1.47(61.8%) 1.47(62.1%)adult 2.52(74.9%) 2.96(81.6%) 3.47(84.9%) 3.62(86.1%) 3.58(85.4%) 3.45(84.0%) 3.29(82.4%)activity 1.05(16.7%) 1.03(16.7%) 1.01(15.3%) 0.97(12.3%) 0.95(9.9%) 0.94(7.4%) 0.93(5.7%)
Table 3.6 shows the speedups of center reuse across feature sets with different step size. Since
decreasing d gives similar or even better speedups, we listed only speedups from the method
CenterReuseDim-dec except for the column ‘1‘, where the speedups from CenterReuseDim-inc are
listed in parentheses. According to the table, the larger the d s t e p , the smaller the speedup. When
the d s t e p is less than 50% of the maximum size of the feature set, the speedups from center
reuse are significant.
3.3.5.3 Insights for Reuse-Based Filtering
This part investigates the influence of the number of landmarks for reuse-based filtering, and the
impact of the filtering on later iterations of k-means.
The number of landmarks determines the number of distance pruned through reuse-based
filtering. As the number of landmarks is larger, the lower bounds of distance from each point to
cluster centers are tighter and thus more exact distance calculations could be pruned; however, the
overhead of calculating the lower bounds also becomes significant.
Table 3.7 shows the speedups and corresponding distance savings for the first iteration of k-
means with reuse-based filtering across k . According to the results, decent speedups manifest
when the number of landmarks is aroundp
n . The observation is consistent with previous studies
on fast knn with triangle inequality [Wan11; Lu12; Din15a].
As mentioned in Section 3.2.3, reuse-based filtering helps with the first iteration of k-means, but
could possibly degrade the efficiency of the later iterations of k-means. The results in Section 3.3.2
and 3.3.3 have already shown that the overall effects are positive, leading to large speedups. Fig-
ures 3.11 and 3.12 show the detailed results of adult on three numbers of landmarks (#l m s ) to shed
some insights in further depth when d = 11 and d = 59. Figures 3.11d and 3.12d report that the
looser bounds due to the use of reuse-based filtering in the first iteration cause about 0-20% extra
distance calculations in later iterations. However, the large savings in the first iteration (reflected by
35

the up to 5.1X speedups in Figure 3.11b and up to 3.4X speedups in Figure 3.12b) still lead to 10-60%
overall distance savings as Figures 3.11f and 3.12f reports. A Similar positive results are observed on
other d values.
3.4 Related Work
Our work falls in the category of algorithm configuration. Algorithm configuration or tuning is to find
the configuration of a given algorithm that maximizes some performance metric. As a combinatorial
problem, algorithm configuration space is often enormous, and the tuning is notoriously time-
consuming.
Many studies have attempted to help shorten the process. Most of these prior methods fall into
three categories [Hol12]: (1) using racing procedures to help eliminate candidate configurations
that are significantly outperformed by other configurations [Bir10; Bal07; Bir02], (2) using stochastic
local search (SLS) methods to intelligently search the configuration space [LI10; Hut07; Hoo04],
(3) using sequential model-based optimization methods to build models to help quickly identify
promising configurations [Hut11; Hut09]. These methods mainly aim at reducing the number of
configurations needed to try to find appropriate configurations. In this work, we tackle the k-means
configuration problem from the angle of computation reuse that is complementary to previous
methods.
Reuse-centric optimization, especially center reuse, at a high level, shares a spirit with that of
transfer learning, which stores the knowledge gained in solving the source task and apply it to other
problems with similar properties. Both concepts are motivated by the fact that knowledge learned
previously can help solve new problems faster or with better solutions [Pan10]. This work materializes
the high-level concept by answering some open questions on what knowledge is beneficial to reuse
for k-means configuration, and how to reuse the knowledge effectively. The set of novel techniques
it proposes are designed to leverage the specific properties of k-means configurations to address
those open challenges.
3.5 Conclusions
This chapter introduced the concept of reuse-centric k-means configurations to promote informa-
tion reuse across the explorations of different configurations of k-means. It was shown that our
computation-reuse promotion techniques, reuse-based filtering and center reuse, could largely
cut the configuration time of k-means–based data classification. We also introduced a two-phase
design, which when working in synergy with the other two techniques, reduced the uniform-search–
based attainment of classification error surfaces by a factor of 9. In addition, through a series of
sensitivity study and in-depth analysis, we provided some important insights on how to tap into the
full potential of the techniques.
36

0 200 400 600 800 1000k
0.05
0.10
0.15
0.20
0.25
first
iter
atio
n ra
tio
IndKmeansTr#lms=500#lms=2000#lms=5000
(a) First iteration ratio over k .
0 200 400 600 800 1000k
2
3
4
5
spee
dup
(X)
#lms=500#lms=2000#lms=5000
(b) First iteration speedups.
0 200 400 600 800 1000k
75
80
85
90
95
savi
ng (%
)
#lms=500#lms=2000#lms=5000
(c) First iteration distance savings.
0 200 400 600 800 1000k
0
5
10
15
20
25
extra
dist
ance
s (%
)
#lms=500#lms=2000#lms=5000
(d) Extra distances in other iterations.
0 200 400 600 800 1000k
10
0
10
20
30
clust
erin
g tim
e sp
eedu
p(%
)
#lms=500#lms=2000#lms=5000
(e) Clustering speedup over k .
0 200 400 600 800 1000k
10
20
30
40
50
dist
ance
savi
ng (%
)
#lms=500#lms=2000#lms=5000
(f) Overall distance savings.
Figure 3.11: Reuse-based filtering performance on different k and different numbers of landmarks(#lms) on adult (dim=11).
37

0 200 400 600 800 1000k
0.10
0.15
0.20
0.25
first
iter
atio
n ra
tio
IndKmeansTr#lms=500#lms=2000#lms=5000
(a) First iteration ratio over k .
0 200 400 600 800 1000k
1.5
2.0
2.5
3.0
spee
dup
(X)
#lms=500#lms=2000#lms=5000
(b) First iteration speedups.
0 200 400 600 800 1000k
40
50
60
70
80
savi
ng (%
)
#lms=500#lms=2000#lms=5000
(c) First iteration distance savings.
0 200 400 600 800 1000k
0.0
2.5
5.0
7.5
10.0
12.5
15.0
extra
dist
ance
s (%
)
#lms=500#lms=2000#lms=5000
(d) Extra distances in other iterations.
0 200 400 600 800 1000k
2.5
5.0
7.5
10.0
12.5
15.0
17.5
clust
erin
g tim
e sp
eedu
p(%
)
#lms=500#lms=2000#lms=5000
(e) Clustering speedup over k .
0 200 400 600 800 1000k
5.0
7.5
10.0
12.5
15.0
17.5
20.0
dist
ance
savi
ng (%
)
#lms=500#lms=2000#lms=5000
(f) Overall distance savings.
Figure 3.12: Reuse-based filtering performance on different k and different numbers of landmarks(#lms) on adult (dim=59).
38

CHAPTER
4
COMPOSABILITY-BASED FAST CNN
PRUNING
4.1 Introduction
CNN pruning is an important method to adapt a large CNN model trained on general datasets to
fit a more specialized task or a smaller device. The key challenge is on deciding which filters to
remove in order to maximize the quality of the pruned networks while satisfying the constraints. It
is time-consuming due to the enormous configuration space and the slowness of CNN training. The
long CNN pruning process is a major barrier for timely solution delivery in Artificial Intelligence
(AI) product development.
The prior efforts have been, however, mostly from the machine learning community [Li16; Hu16;
Mol16; Luo17a; He18]. They leverage DNN algorithm-level knowledge to reduce the enormous
configuration space to a smaller space (called promising subspace) that is likely to contain a good
solution, and then evaluate these remaining configurations to find the best, as Figure 4.1 illustrates.
Although these prior methods help mitigate the problem, network pruning remains a time-
consuming process. One reason is that, despite their effectiveness, no prior techniques can guarantee
the inclusion of the desirable configuration in a much reduced subspace. As a result, to decrease
the risk of missing the desirable configuration, practitioners often end up with a still quite large
subspace of network configurations that takes days for many machines to explore. It is also quite
often true that modifications need to make to the CNN models, datasets, or hardware settings
throughout the development process of an AI product; each of the changes could make the result
of a CNN pruning obsolete and call for a rerun of the entire pruning process. Our conversations
39

2|W| config. space Promising subspace
Prior work This work
Accelerate via block pre-training
Identifypromisingsubspace.
Train & evaluateremaining
configurations.
Bestconfiguration
Improve
Figure 4.1: Complementary relation with prior work for CNN pruning. Prior works have designedheuristic criteria to quickly determine the importance of a filter [Li16; Hu16; Mol16; Luo17a], orto combine with reinforcement learning for selecting the set of promising configurations [He18;Ash17]. This work tries to accelerate the explorations of the remaining promising configurationsthrough computation reuse via composability (block pre-training) supported with a compiler-basedframework.
with AI product developers indicate that the long pruning process is one of the major hurdles for
shortening the time to market AI products.
This study distinctively examines the problem from the programming systems perspective.
Specifically, rather than improving the attainment of promising subspace as all prior work focuses
on, we try to drastically speed up the evaluations of the remaining configurations in the promising
subspace through cross-network computation reuse via a compiler-based framework, a direction
complementary to prior solutions. We achieve the goal through three-fold innovations.
First, we empirically uncover the existence of composability in the training of a collection of
pruned CNN models, and reveal the opportunity that the composability creates for saving computa-
tions in CNN pruning. The basic observation that leads to this finding is that two CNN networks
in the promising subspace often differ in only some layers. In the current CNN pruning methods,
the two networks are both trained from scratch and then tested for accuracy. A question we ask
is whether the training results of the common layers can be reused across networks to save some
training time. More generally, we view the networks in a promising subspace as compositions of a
set of building blocks (a block is a sequence of CNN layers). The question is if we first pre-train (some
of) these building blocks and then assemble them into the to-be-explored networks, can we shorten
the evaluations of these networks and the overall pruning process? Through a set of experiments,
we empirically validate the hypothesis, based on which, we propose composability-based CNN
pruning to capture the idea of reusing pre-trained blocks for pruning (§ 4.2).
Second, we propose a novel hierarchical compression-based algorithm, which, for a given CNN
and promising subspace, efficiently identifies the set of blocks to pre-train to maximize the benefits
of computation reuse. We prove that identifying the optimal set of blocks to pre-train is NP-hard.
Our proposed algorithm provides a linear-time heuristic solution by applying Sequitur [NM97], a
hierarchical compression algorithm, to the CNN configurations in the promising subspace (§ 4.4).
40

Finally, based on all those findings, we developed Wootz1, the first compiler-based framework
that, for an arbitrary CNN (in Caffe Prototxt format) and other inputs, automatically generates
TensorFlow code to build Teacher-Student learning structures to materialize composability-based
CNN pruning (§ 4.3,§ 4.5).
We evaluate the technique on a set of CNNs and datasets with various target accuracies. For
ResNet-50 and Inception-V3, it shortens the pruning process by up to 186.7X and 30.2X respectively.
Meanwhile, the models it finds are significantly more compact (up to 70% smaller) than those by
the default pruning scheme for the same target accuracy (§ 4.6).
4.2 Composability-Based CNN Pruning: Idea and Challenges
The fundamental reason for Wootz to produce large speedups for CNN pruning is its effective
capitalization of computation reuse in CNN pruning, which is built on the composability in CNN
pruning empirically unveiled in this study. Two pruned networks in a promising subspace often
differ in only some of the layers. The basic idea of composability-based CNN pruning is to reuse
the training results of the common layers across the pruned networks. Although the idea may look
straightforward, to our best knowledge, no prior CNN pruning work has employed such reuse,
probably due to a series of open questions and challenges:
• First, there are bi-directional data dependencies among the layers of a CNN. In CNN training,
for an input image, there is a forward propagation that uses a lower layer’s output, which is
called activation maps, to compute the activation maps of a higher layer; it is followed by a
backward propagation, which updates the weights of a lower layer based on the errors com-
puted with the higher layer’s activation maps. As a result of the bi-directional dependencies,
even just one-layer differences between two networks could cause very different weights to
be produced for a common (either higher or lower) layer in the two networks. Therefore, it
remains unclear whether the training results of a common layer could help with the training
of different networks.
• Second, if a pre-trained layer could help, it is an open question how to maximize the benefits. A
pre-trained sequence of consecutive layers may have a larger impact than a single pre-trained
layer does on the whole network, but it may also take more time to produce and has fewer
chances to be reused. How to determine which sets of layers or sequences of layers to pre-train
to maximize the gains has not been explored before.
• Third, how to pre-train just a piece of a CNN? The standard CNN back propagation training
algorithm uses input labels as the ground truth to compute errors of the current network
configurations and adjust the weights. If we just want to train a piece of a CNN, what ground
1The name is after Wootz steel, the legendary pioneering steel alloy developed in the 6th century BC; Wootz bladesgive the sharpest cuts.
41

Hierarchicaltuning blockidentifier
Pre-trainingscripts
Wootzcompiler
Explorationscripts
Definitionsof tuningblocks
Promisingsubspace
A CNN toprune
Datasets &meta data
Objectivesof pruning
The bestnetworkfound
Wootz Framework
exec.
exec.Multiplexingmodel
Pre-trainedtuning blocks
Figure 4.2: Overview of Wootz framework.
truth should we use? What software architecture should be built to do the pre-training and do
it efficiently?
• Fourth, existing DNN frameworks support only the standard DNN training and inference.
Users have to write code to do CNN pruning themselves, which is already complicated for
general programmers. It would add even more challenges to ask them to additionally write
the code to pre-train CNN pieces, and then reuse the results during the evaluations of the
networks.
For the first question, we conduct a series of experiments on 16 large CNNs (four popular
CNN models trained on four datasets). Section 4.6.2 reports the details; here we just state the
key observations. Pre-trained layers bring a network to a much improved starting setting, making
the initial accuracies of the network 50-90% higher than the network without pre-trained layers.
That leads to 30-100% savings of the training time of the network. Moreover, it helps the network
converge to a significantly higher level of accuracy (by 1%-4%). These findings empirically confirm
the potential of composability-based CNN pruning.
To effectively materialize the potential, we have to address the other three challenges. Wootz
offers the solution.
4.3 Overview of Wootz Framework
This section gives an overview of Wootz. Wootz is a software framework that automatically enables
composability-based CNN pruning. As Figure 4.2 shows, its input has four parts:
• The to-be-pruned CNN model, written in Caffe Prototxt (with a minor extension), which is a
user-friendly text format (from Caffe) for CNN model specifications [Jia14].
• The promising subspace that contains the set of pruned networks configurations worth
exploring, following the format in Figure 4.3 (a). The subspace may come from the user or
42

''' An example of a promising subspace specification that contains twoconfigurations. Each number is a pruning rate for a convolutionallayer. For example, the first configuration means the first and thirdlayers are pruned with pruning rate 0.3, the second and fourth layersare not pruned. '''configs=[[0.3, 0, 0.3, 0], [0.5, 0, 0.3, 0]] ''' The configurations should be either a Numpy array or a python listthat can be serialized using Pickle as below. Users only need toprovide configs_path to the compiler. '''pickle.dump(configs, open(configs_path, "wb"))
(a) Promising subspace specifications.
# Format:[min, max] [ModelSize, Accuracy]constraint [ModelSize, Accuracy] [<, >, <=, <=] [Value] # Example:min ModelSizeconstraint Accuracy > 0.8
(b) Pruning objectives specifications.
Figure 4.3: Formats for the specifications of promising subspaces (a) and pruning objectives (b).
some third-party tools that reduce the configuration space for CNN pruning [Hoo11; He18;
Ash17].
• The dataset for training and testing, along with some meta data on the training (e.g., learning
rates, maximum training steps), following the format used in Caffe Solver Prototxt [Caf].
• The objectives of the CNN pruning, including the constraints on model size or accuracy,
following the format shown in Figure 4.3 (b).
The Wootz framework consists of four main components as shown in Figure 4.2. (1) The hierar-
chical tuning block identifier tries to define the set of tuning blocks. A tuning block is a sequence of
pruned consecutive CNN layers taken as a unit for pre-training. Suitable definitions of tuning blocks
help maximize reuse while minimizing the pre-training overhead. (2) From the given CNN model
specified in Prototxt, the Wootz compiler generates a multiplexing model, which is a function written
in TensorFlow that, when invoked, specifies the structure of the full to-be-pruned CNN model, the
network structure—which implements a Teacher-Student scheme—for pre-training tuning blocks,
or pruned networks assembled with pre-trained tuning blocks, depending on the arguments the
function receives. (3) The pre-training scripts are some generic Python functions that, when run,
pre-train each tuning block based on the outputs from the first two components of Wootz. (4) The
final component, exploration scripts, explores the promising pruned networks assembled with the
pre-trained tuning blocks. The exploration of a network includes first fine-tuning the entire network
and then testing it for accuracy. The exploration order is automatically picked by the exploration
scripts based on the pruning objectives to produce the best network as early as possible. Both the
43

pre-training scripts and the exploration scripts can run on one machine or multiple machines in a
distributed environment through MPI.
Wootz is designed to help pruning methods that have their promising subspace known at
front. There are methods that do not provide the subspace explicitly [Zha18d]. They, however, still
need to tune the pruning rate for each layer and the exploration could also contain potentially
avoidable computations. Extending Wootz to harvest those opportunities is a direction worth future
exploration.
Next, we explain the hierarchical tuning block identifier in § 4.4, and the other components in
§ 4.5.
4.4 Hierarchical Tuning Block Identifier
Composability-based CNN pruning faces a trade-off between the pre-training cost and the time
savings the pre-training results bring. The tradeoff depends on the definitions of the unit for pre-
training, that is, the definition of tuning blocks. A tuning block is a unit for pre-training; it consists of
a sequence of consecutive CNN layers pruned at certain rates. It can have various sizes, depending
on the number of CNN layers it contains. The smaller it is, the less pre-training time it takes and the
more reuses it tends to have across networks, but at the same time, its impact to the training time of
a network tends to be smaller.
So for a given promising subspace of networks, a question for composability-based CNN pruning
is how to define the best sets of tuning blocks. The solution depends on the appearing frequencies of
each sequence of layers in the subspace, their pre-training times, and the impact of the pre-training
results on the training of the networks. For a clear understanding of the problem and its complexity,
we define optimal tuning block definition problem as follows.
4.4.1 Optimal Tuning Block Definition Problem
Let A be a CNN consisting of L layers, represented as A1 · A2 · A3 · . . . · AL , where · stands for layer
stacking and Ai stands for the i -th layer (counting from input layer). C = {A(1), A(2), . . . , A(N )} is a
set of N networks that are derived from filter pruning of A, where A(n ) represents the n-th derived
network from A, and Ai(n ) stands for the i -th layer of A(n ), i = 1, 2, . . . , L .
Optimal tuning block definition problem is to identify a set of tuning blocks B = {B1, B2, . . . , BK }such that the following two conditions are met:
1. Every Bk , k = 1,2, · · · , K , is part of a network in C —that is, ∀ Bk , ∃ A(n ), n ∈ {1,2, · · · , N }, such
that Bk = Al(n ) · Al+1
(n ) · . . . · Al+bk−1(n ),1 ≤ l ≤ L − bk + 1, where bk is the number of layers
contained in Bk .
44

2. B is an optimal choice—that is, arg minB
(∑K
k=1 T (Bk )+∑N
n=1 T (A(n ,B ))), where, T (Bk ) is the time
taken to pre-train block Bk , and T (A(n ,B )) is the time taken to train A(n ,B ) to reach the accuracy
objective2; A(n ,B ) is the blocked-trained version of A(n ) with B as the tuning blocks.
A restricted version of the problem is that only a predefined set of pruning rates (e.g., {30%, 50%,
70%}) are used when pruning a layer in A to produce the set of pruned networks in C —which is a
common practice in filter pruning.
Even this restricted version is NP-hard, provable through a reduction of the problem to the
classic knapsack problem [Hoc95] (detailed proof omitted for sake of space.) A polynomial-time
solution is hence in general hard to find, if ever possible. The NP-hardness motivates our design of a
heuristic algorithm, which does not aim to find the optimal solution but to come up with a suitable
solution efficiently. The algorithm does not use the training time as an explicit objective to optimize
but focuses on layer reuse. It is a hierarchical compression-based algorithm, described next.
4.4.2 Hierarchical Compression-Based Algorithm
Our algorithm leverages Sequitur [NM97] to efficiently identify the frequent sequences of pruned
layers in the network collection C . As a linear-time hierarchical compression algorithm, Sequitur
infers a hierarchical structure from a sequence of discrete symbols. For a given sequence of symbols,
it derives a context-free grammar (CFG), with each rule in the CFG reducing a repeatedly appearing
string into a single rule ID. Figure 4.4 gives an example. Its top part shows the concatenated sequence
of layers of four networks pruned at various rates; the subscripts of the numbers indicate the pruning
rate, that is, the fraction of the least important filters of a layer that are removed. The lower part in
Figure 4.4 shows the CFG produced by Sequitur on the string. A full expansion of rule r 0 would give
the original string. The result can also be represented as a Directed Acyclic Graph (DAG) as the right
graph in Figure 4.4 shows with each node corresponding to one rule.
Applying Sequitur to the concatenated sequence of all networks in the promising subspace,
our hierarchical compression-based algorithm gets the corresponding CFG and the DAG. Let R be
the collection of all the rules in the CFG, and S be the solution to the tuning block identification
problem which is initially empty. Our algorithm then heuristically fills S with subsequences of CNN
layers (represented as rules in the CFG) that are worth pre-training.
It does it based on the appearing frequencies of the rules in the promising subspace and their
sizes (i.e., the number of layers a rule contains). It employs two heuristics: (1) A rule cannot be put
into S if it appears in only one network (i.e., its appearing frequency is one); (2) a rule is preferred
over its children rules only if that rule appears as often as its most frequently appearing descendant.
The first heuristic is to ensure that the pre-training result of the sequence can benefit more than
one network. The second heuristic is based on the following observation: A pre-trained sequence
typically has a larger impact than its subsequences all together have on the quality of a network;
2In our framework, T (x ) is not statically known or approximated, but instead explicitly computed (via training) foreach x (i. e, Bk or A(n ,B )).
45

1(.3)2(.3)3(.3)4(.5)5(0) ❶ 1(.3)2(.3)3(.5)4(.5)5(0) ❷ 1(.5)2(.3)3(.3)4(.5)5(0) ❸ 1(0)2(.3)3(.5)4(.5)5(0) ❹
r0 ! r1 r2 ❶ r1 r3 ❷ r6 r8 r2 ❸ r7 r8 r3 ❹ r1 ! r5 r8 r2 ! r9 r4 r3 ! r10 r4 r4 ! r11 r12r5 ! 1(.3)r6 ! 1(.5)r7 ! 1(0)r8 ! 2(.3)r9 ! 3(.3)r10 ! 3(.5)r11 ! 4(.5)r12 ! 5(0)
Freq. Rule ID Rule body
Four networks concatenated into a string
CFG by Sequitur on the above string
1222421142244
Notations:N(d) : the Nth convolution module pruned by a d fraction of filters ❶ : the ending marker of the first network sequence
r0
r1 r2
r8 r9r5r4
r11r12
r3
r10
r6
r7
1(.3) 2(.3) 3(.3) 4(.5)5(0)
3(.5)
1(.5)
1(0)
❶ ❷
❸
❹DAG
2 4 2
2 2
4
44
2
2
11
1
Figure 4.4: Sequitur applies to a concatenated sequence of layers of four networks pruned at rates:0%, 30%, 50%.
46

however, the extra benefits are usually modest. For instance, a ResNet CNN network assembled
from 4-block long pre-trained sequences has an initial accuracy of 0.716, 3.1% higher than the same
network but assembled from 1-block long pre-trained sequences. The higher initial accuracy helps
save extra training steps (epochs) for the network, but the saving is limited (up to 20% of the overall
training time). Moreover, a longer sequence usually has a lower chance to be reused. For these
reasons, we employ the aforementioned heuristics to help keep S small and hence the pre-training
overhead low while still achieving a good number of reuses.
Specifically, the algorithm takes a post-order (children before parent) traversal of the DAG that
Sequitur produces. (Before that, all edges between two nodes on the DAG are combined into one
edge.) At a node, it checks its frequency. If it is greater than one, it checks whether its frequency
equals the largest frequency of its children. If so, it marks itself as a potential tuning block, unmarks
its children, and continues the traversal. Otherwise, it puts a "dead-end" mark on itself, indicating
that it is not worth going further up in the DAG from this node. When the traversal reaches the root
of the DAG or has no path to continue, the algorithm puts all the potential tuning blocks into S as
the solution and terminates.
Note that a side product from the process is a composite vector for each network in the promising
subspace. As a tuning block is put into S , the algorithm, by referencing the CFG produced by Sequitur,
records the ID of the tuning block in the composite vectors of the networks that can use the block.
Composite vectors will be used in the global fine-tuning phase as described in the next section.
The hierarchical compression-based algorithm is designed to be simple and efficient. More
detailed modeling of the time savings and pre-training cost of each sequence for various CNNs could
potentially help yield better definitions of tuning blocks, but it would add significant complexities
and runtime overhead. Our exploration in § 4.6.3 shows that the hierarchical compression-based
algorithm gives a reasonable trade-off.
4.5 Composability-Based Pruning and Wootz Compiler
The core operations in Composability-based CNN pruning includes pre-training of tuning blocks,
and global fine-tuning of networks assembled with the pre-trained blocks. This section first explains
the mechanisms we have designed to support these operations efficiently, and then describes the
implementation of Wootz compiler and scripts that automatically materializes the mechanisms for
an arbitrary CNN.
4.5.1 Mechanisms
4.5.1.1 Pre-Training of Tuning Blocks
The standard CNN back propagation training algorithm uses input labels as the ground truth to
compute errors of the current network and adjusts the weights iteratively. To train a tuning block,
the first question is what ground truth to use to compute errors. Inspired by Teacher-Student
47

networks [Buc06; Ba14; Hin15], we adopt a similar Teacher-Student mechanism to address the
problem.
We construct a network structure that contains both the pruned block to pre-train and the
original full CNN model. They are put side by side as shown in Figure 4.5 (a) with the input to the
counterpart of the tuning block in the full model also flowing into the pruned tuning block as its
input, and the output activation map of the counterpart block flowing into the pruned tuning block
as the "ground truth" of its output. When the standard back propagation algorithm is applied to the
tuning block in this network structure, it effectively minimizes the reconstruction error between the
output activation maps from the pruned tuning block and the ones from its unpruned counterpart
in the full network. (In CNN pruning, the full model has typically already been trained beforehand to
perform well on the datasets of interest.) This design essentially uses the full model as the "teacher"
to train the pruned tuning blocks. Let Ok and O ′k be the vectorized output activation maps from
the unpruned and pruned tuning block, and W ′k be the weights in the pruned tuning block. The
optimization objective in this design is: minW ′k
1|Ok |‖Ok −O ′k‖
22. Only the parameters in the pruned
tuning block are updated in this phase to ensure the pre-trained blocks are reusable.
This Teacher-Student design has three appealing properties. First, it addresses the missing
“ground truth” problem for tuning block pre-training. Second, as the full CNN model runs along with
the pre-training of the tuning blocks, it provides the inputs and "ground truth" for the tuning blocks
on the fly; there is no need to save to storage the activation maps which can be space-consuming
considering the large number of input images for training a CNN. Third, the structure is friendly
for concurrently pre-training multiple tuning blocks. As Figure 4.5 (b) shows, connections can be
added between the full model and multiple pruned blocks; the pre-training of these blocks can then
happen in one run, and the activation maps produced by a block in the full model can be seamlessly
reused across the pre-training of multiple pruned blocks.
4.5.1.2 Global Fine-Tuning
The local training phase outputs a bag of pre-trained pruned tuning blocks, as shown in Figure 4.5
(c) (tuning blocks in the original network could also be included). At the beginning of the global
fine-tuning phase is an assembly step, which, logically, assembles these training blocks into each
of the networks in the promising subspace. Physically, this step just needs to initialize the pruned
networks in the promising subspace with the weights in the corresponding tuning blocks. We call
the resulting network a block-trained network. Recall that one of the side products of the tuning
block identification step is a composite vector for each network which records the tuning blocks
the network can use; these vectors are used in this assembly step. Figure 4.5 (d) gives a conceptual
illustration; three networks are assembled with different sets of pre-trained tuning blocks.
As a pruned block with only a subset of parameters has a smaller model capacity, a global fine-
tuning step is required to further recover the accuracy performance of a block-trained network.
This step runs the standard CNN training on the block-trained networks. All the parameters in
the networks are updated during the training. Compared with training a default pruned network,
48

Block 1
Block 2
Block 3
Block 1
Block 2
Block 3
Block 2
Block 3
Block 1
Block 3Block 3
Block 2Block 2
Block 1Block 1 Block 1
Block 2
Block 3 Block 3
Block 2 Block 2
Block 1Block 1
Block 3
Global Fine-TuningPre-Trained Blocks
Block 1
Block 2
Block 3
Pre-Training
Block 2
Concurrent Pre-Training
(a) (b) (c) (d)
Figure 4.5: Illustration of composability-based network pruning. Eclipses are pruned tuning blocks;rectangles are original tuning blocks; diamonds refer to the activation map reconstruction error.Different colors of pruned tuning blocks correspond to different pruning options.
fine-tuning a block-trained network usually takes much less training time as the network starts with
a much better set of parameter values as shown in § 4.6.
4.5.2 Wootz Compiler and Scripts
Wootz compiler and scripts offer an automatic way to materialize the mechanisms for an arbitrary
CNN model. The proposed method is not restricted to a particular DNN framework, though we
demonstrate its ability using TensorFlow.
We first provide brief background on TensorFlow [Aba15] that is closely relevant to this part.
TensorFlow offers a set of APIs for defining, training, and evaluating a CNN. To specify the structure
of a CNN, one needs to call APIs in a Python script, which arranges a series of operations into a
computational graph. In a TensorFlow computational graph, nodes are operations that consume and
produce tensors, and edges are tensors that represent values flowing through the graph. CNN model
parameters are held in TensorFlow variables, which represent tensors whose values can be changed
by operations. Because a CNN model can have hundreds of variables, it is a common practice to
name variables in a hierarchical way using variable scopes to avoid name clashes. A popular option
to store and reuse the parameters of CNN model is TensorFlow checkpoints. Checkpoints are binary
files that map variable names to tensor values. The tensor value of a variable can be restored from a
checkpoint by matching the variable name.
TensorFlow APIs with other assistant libraries (e.g., Slim [Sil16]) offer conveniences for standard
CNN model training and testing, but not for CNN pruning, let alone composability-based pruning.
Asking a general programmer to implement composability-based pruning in TensorFlow for each
CNN model would add tremendous burdens on the programmer. She would need to write code to
identify tuning blocks, create TensorFlow code to implement the customized CNN structures to
49

pre-train each tuning block, generate checkpoints, and use them when creating the block-trained
CNN networks for global fine-tuning.
Wootz compiler and scripts mitigate the difficulty by automating the process. The fundamental
motivating observation is that the codes for two different CNN models follow the same pattern.
Differences are mostly on the code specifying the structure of the CNN models (both the original
and the extended for pre-training and global fine tuning). The idea is to build code templates and
use the compiler to automatically adapt the templates based on the specifications of the models.
4.5.2.1 Multiplexing Model
An important decision in our design of Wootz is to take Prototxt as the format of an input to-be-
pruned CNN model. Because our tool has to derive code for pre-training and fine-tuning of the
pruned models, our compiler would need to analyze the TensorFlow code from users, which could
be written in various ways and complex to analyze. Prototxt has a clean fixed format. It is easy for
programmers to write and simple for our compiler to analyze.
Given a to-be-pruned CNN model specified in Prototxt, the compiler first generates the multi-
plexing model, which is a piece of TensorFlow code defined as a Python function. It is multiplexing
in the sense that an invocation of the code specifies the structure of the original CNN model, or the
structure for pre-training, or the global fine tuning model; which of the three modes is used at an
invocation of the multiplexing model is determined by one of its input arguments, mode_to_use.
The multiplexing design allows easy code reuse as the three modes share much common code
for model specifications. Another argument, prune_info, conveys to the multiplexing model the
pruning information, including the set of tuning blocks to pre-train in this invocation and their
pruning rates.
The compiler-based code generation needs to provide mainly two-fold support. It needs to
map CNN model specifications in Prototxt to TensorFlow APIs. Our implementation, specifically,
generates calls to TensorFlow-Slim API [SG16] to add various CNN layers based on the parsing
results of the Prototxt specifications. The other support is to generate the code to also specify the
derived network structure for pre-training each tuning block contained in prune_info. Note that
the layers contained in a tuning block are the same as a section of the full model except for the
number of filters in the layers and the connections flowing into the block. The compiler hence
emits code for specifying each of the CNN layers again, but with connections flowing from the full
network, and sets the "depth" argument of the layer-adding API call (a TensorFlow-Slim API [SG16])
with the info retrieved from prune_info such that the layer’s filters can change with prune_info at
different calls of the multiplexing model. In addition, the compiler encloses the code with condition
checks to determine, based on prune_info, at an invocation of the multiplexing model whether the
layer should be actually added into the network for pre-training. The code generation for the global
fine-tuning is similar but simpler. In such a form, the generated multiplexing model is adaptive to
the needs of different modes and the various pruning settings.
50

Once the multiplexing model is generated, it is registered at the nets factory in Slim Model
Library [Sil16]with its unique model name. The nets factory is part of the functional programming
Slim Model Library is based on. It contains a dictionary mapping a model name to its corresponding
model function for easy retrieval and use of the models in other programs.
4.5.2.2 Pre-Training Scripts
The pre-training scripts contain a generic pre-training Python code and a wrapper that is adapted
from a Python template by the Wootz Compiler to the to-be-pruned CNN model and meta data. The
pre-training Python code retrieves the multiplexing model from nets factory based on the registered
name, and repeatedly invokes the model function with the appropriate arguments, with each call
generating one of the pre-train networks. After defining the loss function, it launches a TensorFlow
session to run the pre-training process.
The wrapper calls the pre-training Python code with required arguments such as model name
and the set of tuning blocks to train. As the tuning blocks coexisting in a pruned network cannot
have overlapping layers, one pruned network can only enable the training of a limited set of tuning
blocks. We design a simple algorithm to partition the entire set of tuning blocks returned by the
Hierarchical Tuning Block Identifier into groups. The pre-training Python script is called to train
only one group at a time. The partition algorithm is as follows:
1: Inputs: B // the entire set of tuning blocks2: Outputs: G // the set of groups of tuning blocks3: B .sort() // sort by the contained lowest conv layers4: G = {{B [0]}}5: for b ∈ B [1 :] do6: for g ∈G do7: any([overlap(b , e ) for e in g ])? G .add({b }):g .add(b )
The meta data contains the training configurations such as dataset name, dataset directory,
learning rate, maximum training steps and batch size for pre-training of tuning blocks. The set of
options to configure are predefined, similar to the Caffe Solver Prototxt [Caf]. The compiler parses
the meta data and specifies those configurations in the wrapper.
Executing the wrapper produces pre-trained tuning blocks that are stored as TensorFlow check-
points. The mapping between the checkpoint files and trained tuning blocks are also recorded for
the model variable initialization in the global fine-tuning phase. The pre-training script can run on
a single node or multiple nodes in parallel to concurrently train multiple groups through MPI.
51

4.5.2.3 Exploration Scripts
Exploration scripts contain a generic global fine-tuning Python code and a Python-based wrapper.
The global fine-tuning code invokes the multiplexing model to generate the pruned network ac-
cording to the configuration to evaluate. It then initializes the network through the checkpoints
produced in the pre-train process and launches a TensorFlow session to train the network.
In addition to feeding the global fine-tuning Python code with required arguments (e.g. the con-
figuration to evaluate), the Python-based wrapper provides code to efficiently explore the promising
subspace. The order of the exploration is dynamically determined by the objective function.
The compiler first parses the file that specifies the objective of pruning to get the metric that
needs to be minimized or maximized. The order of explorations is determined by the corresponding
MetricName. In case the MetricName is ModelSize, the best exploration order is to start from the
smallest model and proceed to larger ones. If the MetricName is Accuracy, the best exploration order
is the opposite order as a larger model tends to give a higher accuracy.
To facilitate concurrent explorations on multiple machines, the compiler generates a task as-
signment file based on the order of explorations and the number of machines to use specified by
the user in the meta data. Let c be the number of configurations to evaluate and p be the number
of machines available, the i -th node will evaluate the i +p ∗ j -th smallest (or largest) model, where
0≤ j ≤ bc /p c.
4.6 Evaluations
We conduct a set of experiments to examine the efficacy of Wootz. Our experiments are designed to
answer the following major questions: 1) Whether pre-training the tuning blocks of a CNN helps the
training of that CNN reach a given accuracy sooner? We refer to it as the composability hypothesis
as its validity is the prerequisite for the composability-based CNN pruning to work. 2) How much
benefits we could get from composability-based CNN pruning on both the speed and the quality of
network pruning while counting the pre-training overhead? 3) How much extra benefits we could
get from hierarchical tuning block identifier?
We first describe the experiment settings (datasets, learning rates, machines, etc.) in § 4.6.1,
then report our experiment results in § 4.6.2 and § 4.6.3 to answer each of the three questions.
4.6.1 Experiment Settings
4.6.1.1 Models and Datasets
Our experiments use four popular CNN models: ResNet-50 and ResNet-101, as representatives of
the Residual Network family [He16], and Inception-V2 and Inception-V3, as representatives of the
Inception family [Sze15]. They have 50, 101, 34, 48 layers respectively. These models represent a
structural trend in CNN designs, in which, several layers are encapsulated into a generic module of
a fixed structure—which we call convolution module—and a network is built by stacking many such
52

Table 4.1: Dataset statistics.
DatasetSize
ClassesAccuracy
Total Train Test ResNet-50 ResNet-101 Inception-V2 Inception-V3
General ImageNet [Rus15] 1,250,000 1,200,000 50,000 1000 0.752 0.764 0.739 0.780
Special
Flowers102 [Nil08] 8,189 6,149 2,040 102 0.973 0.975 0.972 0.968CUB200 [Wel10] 11,788 5,994 5,794 200 0.770 0.789 0.746 0.760Cars [Kra13] 16,185 8,144 8,041 196 0.822 0.845 0.789 0.801Dogs [Kho11] 20,580 12,000 8,580 120 0.850 0.864 0.841 0.835
modules together. Such CNN models are holding the state-of-the-art accuracy in many challenging
deep learning tasks. The structures of these models are described in input Caffe Prototxt3 files and
converted to the multiplexing models by the Wootz compiler.
For preparation, we adapt the four CNN models trained on ImageNet [Rus15] (ILSVRC 2012) to
each of four specific image classification tasks with the domain-specific datasets, Flowers102 [Nil08],
CUB200 [Wel10], Cars [Kra13], and Dogs [Kho11]. It gives us 16 trained full CNN models. The accuracy
of the trained ResNets and Inceptions on the test datasets are listed in columns Accuracy in Table 4.1.
The four datasets for CNN pruning are commonly used in fine-grained recognition [Kra16; Fu17;
Mol16; How17; Zha17], which is a typical usage scenario of CNN pruning. Table 4.1 reports the
statistics of the four datasets, including the data size for training (Train), the data size for testing
(Test), and the number of classes (Classes). For all experiments, network training is performed on
the training sets while accuracy results are reported on the testing sets.
4.6.1.2 Baseline for Comparison
In CNN pruning, the full CNN model to prune has typically been already trained on the datasets
of interest. When filters in the CNN are pruned, a new model with fewer filters is created, which
inherits the remaining parameters of the affected layers and the unaffected layers in the full model.
The promising subspace consists of such models. The baseline approach trains these models as they
are. Although there are prior studies on accelerating CNN pruning, what they propose are all various
ways to reduce the configuration space to a promising subspace. To the best of our knowledge, when
exploring the configurations in the promising subspace, they all use the baseline approach. As our
method is the first for speeding up the exploration of the promising space, we compare our results
with those from the baseline approach.
We refer to a pruned network in the baseline approach a default network while the one initialized
with pre-trained tuning blocks in our method a block-trained network.
4.6.1.3 Promising Subspace
The 16 trained CNNs contain up to hundreds of convolutional layers. A typical practice is to use
the same pruning rate for the convolutional layers in one convolution module. We adopt the same
strategy. The importance of a filter is determined by its `1 norm as previous work [Li16] proposes.
3We add to Prototxt a new construct "module" for specifying the boundaries of convolution modules.
53

Following prior CNN pruning practice [Li16; Luo17a], the top layer of a convolution module is kept
unpruned; it helps ensure the dimension compatibility of the module.
There are many ways to select the promising subspace, i.e., the set of promising configurations
worth evaluating. Previous works select configurations either manually [Li16; Luo17a] or based on
reinforcement learning with various rewards or algorithm design [He18; Ash17]. As that is orthogo-
nal to the focus of this work, to avoid bias from that factor, our experiment forms the promising
spaces through random sampling [Ber12] of the entire pruning space. A promising space contains
500 pruned networks, whose sizes follow a close-to-uniform distribution. In the experiments, the
pruning rate for a layer can be one of Γ = {30%, 50%, 70%}.
4.6.1.4 Objective of Pruning
There are different pruning objectives including minimizing model size, computational cost, mem-
ory footprint or energy consumption. Even though an objective of pruning affects the choice of the
best configuration, all objectives require the evaluation of the set of promising configurations. Our
composability-based CNN pruning aims at accelerating the training of a set of pruned networks
and thus can work with any objective of pruning.
For the demonstration purpose, we set the objective of pruning as finding the smallest network
(min ModelSize) that meets a given accuracy threshold (Accuracy <= thr_acc). We get a spectrum of
thr_acc values by varying the accuracy drop rate α from that of the full model from -0.02 to 0.08. We
include negative drop rates because it is possible that pruning makes the model more accurate.
4.6.1.5 Meta Data on Training
The meta data on the training in both the baseline approach and our composability-based approach
are as follows. Pre-training of tuning blocks takes 10,000 steps for all ResNets, with a batch size 32,
a fixed learning rate 0.2, and a weight decay 0.0001; it takes 20,000 steps for all Inceptions, with
batch size 32, a fixed learning rate 0.08, and a weight decay 0.0001. The global fine-tuning in the
composability-based approach and the network training in the baseline approach uses the same
training configurations: max number of steps 30,000, batch size 32, weight decay 0.00001, fixed
learning rate 0.0014.
All the experiments are performed with TensorFlow 1.3.0 on machines each equipped with a
16-core 2.2GHz AMD Opteron 6274 (Interlagos) processor, 32 GB of RAM and an NVIDIA K20X GPU
with 6 GB of DDR5 memory. One network is trained on one GPU.
4.6.2 Validation of the Composability Hypothesis
We first present empirical validations of the composability hypothesis (i.e., pre-training tuning blocks
helps CNN reach an accuracy sooner) as its validity is the prerequisite for the composability-based
CNN pruning to work.
4We experimented with other learning rates and dynamic decay schemes. No single choice works best for all networks.We decided on 0.001 as it gives the overall best results for the baseline approach.
54

0 5 10 15 20 25 30#steps (k)
0.00.10.20.30.40.50.60.7
accu
racy
init
finalfinal+
init+
defaultblock-trained
(a) ResNet-50
0 5 10 15 20 25 30#steps (k)
0.00.10.20.30.40.50.60.7
accu
racy
init
finalfinal+
init+
defaultblock-trained
(b) Inception-V3
Figure 4.6: Accuracy curves of the default and block-trained networks on dataset CUB200. Eachnetwork has 70% least important filters pruned at all convolution modules.
Table 4.2: Median accuracies of default networks (init, final) and block-trained networks (init+,final+).
ModelsAccuracyType
Flowers102 CUB200 Cars Dogs
ResNet-50
init 0.035 0.012 0.012 0.010init+ 0.926 0.662 0.690 0.735final 0.962 0.707 0.800 0.754final+ 0.970 0.746 0.821 0.791
ResNet-101
init 0.048 0.021 0.009 0.028init+ 0.932 0.698 0.663 0.733final 0.968 0.741 0.832 0.785final+ 0.977 0.767 0.844 0.814
Inception-V2
init 0.030 0.011 0.011 0.010init+ 0.881 0.567 0.552 0.630final 0.960 0.705 0.785 0.732final+ 0.966 0.725 0.806 0.771
Inception-V3
init 0.029 0.011 0.009 0.012init+ 0.866 0.571 0.542 0.563final 0.959 0.711 0.796 0.728final+ 0.965 0.735 0.811 0.755
30 35 40 45 50 55 60model size (%)
0.9500.9550.9600.9650.9700.975
accu
racy
defaultblock-trained
full model
(a) Flowers102
30 35 40 45 50 55 60model size (%)
0.760.770.780.790.800.810.820.83
accu
racy
defaultblock-trained
full model
(b) Cars
Figure 4.7: Accuracies of pruned networks of ResNet-50 after training. The model size of full ResNet-50 is 25.6 million.
55

Table 4.2 reports the median of the initial and final accuracies of all 500 block-trained networks
and their default counterparts for each of the models on every dataset. The mean is very close (less
than 1%) to the median in all the settings. In this experiment, the tuning blocks are simply the CNN
modules in each network. Overall, block-trained networks yield better final accuracies than default
networks do with one-third less training time.
To show details, the two graphs in Figure 4.6 give accuracy curves attained during the trainings
of one of the pruned networks in ResNet-50 and Inception-V3 respectively. Dataset CUB200 is used.
The initial accuracies (init) are close to zero for the default version, while 53.4% and 40.5% for
the block-trained version (init+). Moreover, the default version gets only 65.3% and 67.3% final
accuracies (final) respectively, while the block-trained version achieves 72.5% and 70.5% after only
two-thirds of the training time. Results on other pruned networks show a similar trend.
The results offer strong evidence for the composability hypothesis, showing that pre-training the
tuning blocks of a CNN can indeed help the training of that CNN reach a given accuracy sooner.
The benefits do not come for free; overhead is incurred by the pre-training of the tuning blocks. We
next report the performance of Wootz as a whole.
4.6.3 Results of Wootz
We first evaluate the performance of composability-based network pruning and then report the
extra benefits from the hierarchical tuning blocks identifier.
4.6.3.1 Basic Benefits
To measure the basic benefits from the
composability-based method, these experiments use every convolution module in these networks
as a tuning block. The extra benefits from hierarchical tuning block identification are reported later.
Figure 4.7 shows the final accuracies of all the 500 ResNet-50 variants trained with or without
leveraging composability on the Flower102 and CUB200 datasets. For reference, we also plot the
accuracies of the well-trained full ResNet-50 on the two datasets. The block-trained network gives a
clearly better final accuracy overall, which echoes the results reported in the previous subsection.
Tables 4.3 and 4.4 report the comparisons between the block-trained version and the default
version, in both speeds and network sizes, at various levels of tolerable accuracy drop rates α
(negative means higher accuracy than the large network gives). The results are collected when 1, 4,
or 16 machines are used for concurrent training for both the baseline and our method (indicated by
the "#nodes" column). The time of the block-trained version already takes the pre-training time of
tuning blocks into account ("overhead" in Tables 4.3 and 4.4 show the percentage in overall time).
For the objective of pruning, the exploration order Wootz adopts is to start from the smallest models
and proceed to larger ones.
The results show that the composability-based method avoids up to 99.6% of trial configurations
and reduces the evaluation time by up to 186X for ResNet-50; up to 96.7% reduction and 30X
speedups for Inception-V3. The reduction of trial configurations is because the method improves
56

the accuracy of the pruned networks as Figure 4.7 shows. As a result, the exploration meets a desirable
configuration sooner. For instance, in Flower102 (α = 0), the third smallest network can already
reach the target accuracy in the block-trained version while the 297th network meets the target in
the default version. This not only shortens the exploration time, but also yields more compact (up
to 70% smaller) networks as the “model size” columns in Tables 4.3 and 4.4 show. Another reason for
the speedup is that the training of a block-trained network takes fewer iterations to reach its final
accuracy level than the default version, as Figure 4.6 has illustrated. Even when configurations are
not reduced (e.g., Flower102, α=−1), the block-trained exploration finishes sooner.
Table 4.5 shows the speedups by composability-based pruning with different subspace sizes.
The speedups are higher as the number of configurations to explore increases. It is because the
time for pre-training tuning blocks weights less as the total time increases and the reduction of
configurations becomes more significant for a larger set. Another observation is that, when the
number of configurations is only four, there is still a significant speedup in most of cases. The block
training time is the time spent on pre-training all the tuning block variants (48 for ResNet-50 and 27
for Inception-V3). The speedup could be higher if tuning block identifier is applied, as shown next.
4.6.3.2 Extra Benefits from Tuning Blocks Identification
Hierarchical tuning block identifier balances the overhead of training tuning blocks and the time
savings they bring to the fine-tuning of pruned networks. Table 4.6 reports the extra speedups
brought when it is used.
For datasets Flowers102 and CUB200, we experiment with two types of collections of configu-
rations with N = 8. The first type, “collection-1”, is a randomly sampled collection as mentioned
earlier, and the second type, “collection-2”, is attained by setting one pruning rate for a sequence
of convolution modules, similar to the prior work [Li16] to reduce module-wise meta-parameters.
For each type, we repeat the experiments five times with a new collection created each time. Each
tuning block identified from the first collection tends to contain only one convolution module due
to the independence in choosing the pruning rate for each module. But the average number of
tuning blocks is less than the total number of possible pruned convolution modules (41 versus 48
for ResNet-50 and 27 versus 33 for Inception-V3) because of the small collection size. The latter
one has tuning blocks that contain a sequence of convolution modules as they are set to use one
pruning rate.
The extra speedups from the algorithm are substantial for both, but more on the latter one for
the opportunities that some larger popular tuning blocks have for benefiting the networks in that
collection. Because some tuning blocks selected by the algorithm are a sequence of convolution
modules that frequently appear in the collections, the total number of tuning blocks becomes
smaller (e.g., 27 versus 23 on Inception-V3.)
57

Table 4.3: Speedups and configuration savings for ResNet-50 by composability-based pruning(when 1, 4, or 16 machines are used for both baseline and composability-based methods as "#nodes"column indicates). Notations are at the table bottom.
Dataset α #nodesResNet-50
thr_acc#configs time (h) model size speedup
(X)overhead
base comp base comp base comp
Flowers102-1%
1416
0.983500500500
500500500
2858.7718.1184.9
1912.7481.0125.5
100% 100%1.51.51.5
0.4%0.5%1.8%
0%1416
0.973297300304
3416
1639.4412.6103.3
16.95.24.7
45.4% 29.3%97.079.322.0
40.4%43.5%48.3%
1%1416
0.9636816
1416
31.010.45.2
8.33.22.9
29.6% 27.6%3.73.31.8
82.8%70.6%78.3%
CUB2004%
1416
0.739323324336
2416
1807.3454.0118.7
12.73.13.1
46.6% 28.5%142.3146.538.3
53.7%74.4%74.4%
5%1416
0.731297300304
1416
1654.7418.8105.5
8.92.82.7
45.4% 27.6%185.9149.639.1
77.1%81.4%83.7%
6%1416
0.724154156160
1416
840.1214.253.8
8.32.62.5
38.0% 27.6%101.282.421.5
82.6%86.7%89.7%
Cars-1%
1416
0.830500500500
100100112
2864.9720.4185.3
362.490.927.1
100% 35.7%7.97.96.8
1.9%2.5%8.4%
0%1416
0.822332332336
111216
1848.6461.4115.9
44.412.15.2
46.9% 30.4%41.638.122.3
15.4%18.8%44.0%
1%1416
0.814189192192
246
1026.4259.765.5
12.84.94.1
40.4% 28.5%80.253.016.0
53.4%46.7%55.7%
Dogs6%
1416
0.799500500500
123124128
2848.1709.8178.0
441.1111.228.3
60.0% 36.9%6.56.46.3
1.6%2.0%8.1%
7%1416
0.791434436448
707280
2445.4606.2149.3
251.863.918.0
51.9% 34.2%9.79.58.3
2.7%3.6%12.7%
8%1416
0.782297300304
111216
1632.8411.7102.4
42.310.13.2
45.4% 30.4%38.640.832.0
16.2%22.7%71.6%
* thr_acc: accuracy corresponding to an accuracy drop rate α. base: baseline approach. comp: composability-based approach.speedup: T i meb a s e /T i mec o mp ; overhead counted in T i mec o mp . overhead: block training time over the total time of comp.
58

Table 4.4: Speedups and configuration savings for Inception-V3 by composability-based pruning.
Dataset α #nodesInception-V3
thr_acc#configs time (h) model size speedup
(X)overhead
base comp base comp base comp
Flowers102-1%
1416
0.978500500500
500500500
3018.8756.7194.8
2023.5508.1133.6
100% 100%1.51.51.5
0.5%0.7%2.7%
0%1416
0.968244244256
101216
1428.6358.294.8
47.313.96.5
43.2% 32.4%30.225.814.6
23.3%26.4%56.4%
1%1416
0.958272832
1416
152.639.611.2
13.95.85.6
33.9% 31.0%11.06.82.2
79.0%63.3%71.0%
CUB2004%
1416
0.720747680
3416
420.2106.427.6
21.96.76.0
41.4% 33.7%19.215.94.6
49.8%54.5%60.6%
5%1416
0.710444448
1416
247.861.716.4
14.15.45.2
38.5% 31.5%17.611.43.2
77.5%67.6%70.6%
6%1416
0.700293232
1416
162.544.510.8
12.85.35.1
35.9% 31.0%12.78.42.1
85.1%68.7%71.9%
Cars-1%
1416
0.811271272272
202032
1586.8398.199.4
85.622.411.1
40.1% 33.5%18.517.89.0
12.8%16.3%32.8%
0%1416
0.801848496
3416
480.3120.533.8
21.87.26.7
36.9% 31.3%22.016.75.0
50.2%50.6%54.7%
1%1416
0.791333648
1416
186.450.716.4
14.26.86.2
34.4% 31.0%13.17.52.6
77.0%54.0%59.1%
Dogs6%
1416
0.776416416416
201204208
2470.7618.2153.2
786.0199.352.7
100% 47.9%3.13.12.9
1.4%1.8%6.9%
7%1416
0.766311312320
129132144
1822.2456.1116.2
503.2128.036.4
56.0% 41.4%3.63.63.2
2.2%2.8%10.0%
8%1416
0.756201204208
828496
1164.1294.875.0
322.983.126.1
47.9% 39.0%3.63.52.9
3.4%4.4%13.9%
Table 4.5: Speedups by composability-based pruning with different subspace sizes.
Dataset alphasubspacesize
ResNet-50 Inception-V3basetime (h)
comptime (h)
speedup(X)
basetime (h)
comptime (h)
speedup(X)
Flowers102 0%
4 22.7 13.4 1.7 20.3 16.8 1.216 90.9 12.8 7.1 76.7 20.6 3.764 364.8 21 17.4 224.7 25.4 8.8256 1460.7 13.5 108.2 809.4 40.7 19.9
CUB200 3%
4 22.8 11 2.1 23.6 26 0.916 93.8 11.4 8.2 83.5 30 2.864 369.6 15.5 23.8 292.5 29.2 10256 1472.9 20.7 71.2 1128.9 18.1 62.4
59

Table 4.6: Extra speedups brought by improved tuning block definitions.
Dataset αResNet-50 Inception-V3
thr_accextra speedup (X)
thr_accextra speedup (X)
collection-1 collection-2 collection-1 collection-2
Flowers1020% 0.973 1.05 0.98 0.968 1.12 1.141% 0.963 1.19 1.21 0.958 1.08 1.152% 0.953 1.06 1.14 0.949 1.15 1.23
CUB2003% 0.747 1.04 1.08 0.737 1.00 1.034% 0.739 1.04 1.20 0.729 1.08 1.095% 0.731 1.11 1.15 0.722 1.03 1.04
geometric mean 1.08 1.12 1.08 1.11
4.7 Related Work
Recent years have seen many studies on speeding up the training and inference of CNN, both in
software and hardware. For the large volume, it is hard to list all; some examples are work on software
optimizations [Han15a; Zhu18; Luo18; Iof15] and work on special hardware designs [Buc18; Fow18;
Ovt15; Sha18; Mos18; Eck18; Luo17b]. These studies are orthogonal to CNN pruning. Although they
can potentially apply to the training of pruned CNNs, they are not specifically designed for CNN
pruning. They focus on speeding up the computations within one CNN network. In contrast, our
work exploits cross-network computation reuse, exploiting the special properties of CNN pruning—
many configurations to explore, common layers shared among them, and most importantly, the
composability unveiled in this work. We next concentrate on prior work closely related to CNN
pruning.
Deep neural networks are known to have many redundant parameters and thus could be pruned
to more compact architectures. Network pruning can work at different granularity levels such as
weights/connections [Han15b; LeC90; Agh17], kernels [Wen16] and filters/channels [Li16; Mol16;
Luo17a]. Filter-level pruning is a naturally structured way of pruning without introducing sparsity,
avoiding creating the need for sparse libraries or specialized hardware. Given a well-trained network,
different metrics to evaluate filters importance are proposed such as Taylor expansion [Mol16], `1
norm of neuron weights [Li16], Average Percentage of Zeros [Hu16], feature maps’ reconstruction
errors [Luo17a; He17], and scaling factors of batch normalization layers [Liu17b]. These techniques,
along with general algorithm configuration techniques [Hoo11; Ber12; Sno12] and recent reinforce-
ment learning-based methods [He18; Ash17], show promise in reducing the configuration space
worth exploring. Our work distinctively aims at reducing the evaluation time of the remaining
configurations by eliminating redundant training.
Another line of work in network pruning conducts pruning dynamically at runtime [Fig17;
McG17; Lin17]. Instead of finding the best small network, they try to generate networks that can
adaptively activate only part of the network for inference on a given input. Because each part of the
generated network may be needed for some inputs, the overall size of the generated network could
be still large. They are not designed to make the network meet the limited resource constraints on a
system.
60

Sequitur [NM97] has been applied to various tasks, including program and data pattern analy-
sis [Lau05; Chi01; Lar99; Law03; Chi02; Wal10]. We have not seen its use in CNN pruning.
Several studies train student networks to mimic the output of a teacher network [Buc06; Ba14;
Hin15]. Our method of pre-training tuning blocks is inspired by these work, but works at a different
level: rather than for training an entire network, we need to train pieces of a network. We are not
aware of the prior use of such a scheme at this level.
4.8 Conclusions
This chapter described a novel composability-based approach to accelerating CNN pruning via
computation reuse. We designed a hierarchical compression-based algorithm to efficiently identify
tuning blocks for pre-training and effective reuse. We further developed Wootz, the first compiler-
based software framework that automates the application of the composability-based approach to
an arbitrary CNN model. Experiments show that network pruning enabled by Wootz shortens the
state-of-the-art pruning process by up to 186X while producing significantly better pruned networks.
The long exploration time of CNN pruning has been a major barrier for timely delivery of many AI
products. The promising results of Wootz indicate its potential for significantly lowering the barrier,
and hence reducing the time to market AI products.
61

CHAPTER
5
EFFICIENT ENSEMBLE TRAINING WITH
DATA SHARING
5.1 Introduction
An essential step to apply DNNs to a new data set is hyper-parameter tuning—that is, the selection of
an appropriate network architecture and hyper-parameters (e.g., the number of layers, the number
of filters at each layer, and the learning rate scheduling). It is called Neural Architecture Search
(NAS) when the tuned parameters determine a DNN’s architecture. Many different search strategies
have been proposed such as random search [Ber12; Li19], reinforcement learning [Zop16; Zop18],
evolutionary methods [Sal17], and Bayesian Optimization [Kan18]. Most existing methods used
today need to train a large set of DNN candidates with different architectures (e.g. 450 networks
being trained concurrently in [Zop18]) to identify the best model for a particular task.
An effective strategy for shortening the process of hyperparameter tuning and NAS is to con-
currently train a set of DNNs on a cluster of nodes1, which is referred to as ensemble training of
DNNs. We refer to an ensemble of DNNs with the same architecture as a homogeneous ensemble.
Otherwise, the ensemble is called heterogeneous ensemble.
A common ensemble training strategy is to duplicate a training pipeline on multiple nodes to
train DNNs in parallel. A typical DNN training pipeline is an iterative process including data fetching,
preprocessing, and training. For the ease of description, we refer to data fetching and preprocessing
together as preprocessing. In ensemble training, training steps are not identical because we train
1A “node” in this chapter refers to a machine in a cluster; one node may contain one or more CPUs and GPUs
62

models with different architectures and configurations. However, preprocessing is redundant across
the pipelines, resulting in unnecessary CPU usage and even poor pipeline performance.
To eliminate the redundancies, Pittman et al. [Pit18] proposed data sharing where the common
preprocessing operations are shared across training pipelines of all DNNs in an ensemble. They
demonstrated that data sharing is an effective strategy to reduce computational resource utilization
and improve pipeline efficiency. Their solution, however, assumes relatively homogeneous compu-
tational needs for DNNs in an ensemble. It may perform poorly for an heterogeneous ensemble due
to the variance of DNN model training from two algorithmic characteristics.
The first algorithmic characteristic is varying training rate. Training rate of a DNN is the compute
throughput of processing units (e.g., CPUs and GPUs) used for training the DNN. Each DNN in an
heterogeneous ensemble could have varying computational needs and thus different training rates
with the same computing resources [Can16; Sze17]. If a DNN consumes preprocessed data slower
than other DNNs, others will have to wait for the slower one before evicting current set of cached
batches when we employ synchronized data fetching for data sharing to ensure that each DNN is
trained using the entire dataset. This waiting lowers the utilization of computing resources in the
cluster and delays the overall training time of the ensemble.
The second one is varying convergence speed. Due to the differences in network architecture
or hyper-parameter settings, some DNNs may require a larger number of epochs (one epoch goes
through all data samples once) to converge than others [Kri12; He16; Hua17; Zag16]. There can
be scenarios where a subset of DNNs in the ensemble have already converged while the shared
preprocessing operations have to keep prepossessed data for the remaining DNNs. Resources
allocated to these converged DNNs will be under-utilized until the training of all the DNNs is
completed.
To address the issues, we propose FLEET, a flexible ensemble training framework for efficiently
training a heterogeneous set of DNNs. We build FLEET via several technical innovations. First, we
formalize the essence of the problem into an optimal resource allocation problem. We analyze the
computational complexity of the problem and present an efficient greedy algorithm that groups a
subset of DNNs into a unit (named flotilla) and effectively maps DNNs to GPUs in a flotilla on the
fly. The algorithm incurs marginal runtime overhead while balancing the progressing pace of DNNs.
Second, we develop a set of techniques to seamlessly integrate distributed data-parallel training of
DNN, preprocessing sharing, and runtime DNN-to-GPU assignments together into FLEET, the first
ensemble DNN training framework for heterogeneous DNNs. We introduce checkpointing into this
context to address the issue of different convergence speeds. FLEET features flexible and efficient
communications and effective runtime resource allocations.
Experiments on 100 heterogeneous DNNs on SummitDev, the Oak Ridge Leadership Computing
Facility (Sec 5.5.1), demonstrate that FLEET can speed up the ensemble training by 1.12-1.92X over
the default training method, and 1.23-1.97X over the state-of-the-art framework that was designed
for homogeneous ensemble training.
63

Table 5.1: The job of different processes.
Process Type Job Description
Preprocesserfetch data from storage, preprocess the data, and sendthe preprocessed data to its paired training group master.
Training Group Master
receive the preprocessed data from its paired preprocesser,scatter it within its training group, broadcast the data toother training group masters, and train the DNN usingthe assigned batch of data.
Training Workerreceive the assigned batch of data from its traininggroup master and use it to train the DNN.
P1
P2
T1 (D1)
T2 (D2)
T3 (D2)
T4 (D3)
T5 (D4)
T6 (D4)
T7 (D4)
T8 (D4)
Figure 5.1: An illustration of the ensemble training pipeline in FLEET. P1 and P2 are preprocessorsand T1-T8 are trainers. There are four training groups, (T1), (T2, T3), (T4), (T5, T6, T7, T8), whichtrain the four DNNs D1-D4 respectively. Edges indicate transfers of preprocessed images.
5.2 Overview of FLEET
This section gives an overview of FLEET. FLEET is a flexible pipeline software architecture for efficient
ensemble training of heterogeneous DNNs. It provides flexibility for configuring the scheduling of
DNNs on nodes and GPUs via separation of preprocessing and training into different processes and
a collection of communication schemes. It creates efficiency via heterogeneity-conscious runtime
resource allocation and scheduling, plus sharing of preprocessing results among DNNs.
FLEET uses two types of processes, called preprocessor and trainer, to perform preprocessing
and training separately. A trainer group contains at least one trainer processes and is responsible
for training one DNN in the ensemble. A trainer process uses one GPU for training. When a trainer
group contains more than one trainer process, they perform data-parallel DNN training for one
DNN. Each trainer group has a trainer as the training group master and zero or more trainers as
the training workers. The preprocessors communicate directly with only some master trainers, and
those master trainers forward the preprocessed data to other trainers. Figure 5.1 illustrates the
ensemble training pipeline in FLEET. The job of each process is summarized in Table 5.1.
Efficiency and Flexibility. Two important features of FLEET are its efficiency and flexibility.
The efficiency of FLEET comes from its novel resource allocation strategy developed for DNN
ensemble training. The strategy is powered by some fundamental understanding of this resource
allocation problem, and a greedy scheduling algorithm designed specifically to heterogeneous
64

ensemble training. The algorithm seamlessly integrates data-parallel distributed training with
ensemble training. As illustrated in Figure 5.1, different number of GPUs can be allocated to each
DNN so that the DNNs can reach a similar training rate, avoiding the pipeline inefficiency caused
by the slowest DNNs. It overcomes the NP-hardness of the resource allocation problem through a
greedy design, grouping DNNs into multiple flotillas and periodically (re)allocate GPUs to remaining
DNNs in a global efficient manner. It further leverages check-pointing to mitigate the issue of varying
convergence speeds among DNNs. Together, FLEET is able to achieve efficient ensemble training
while enabling data sharing to save CPU usage.
The flexibility of FLEET is in two aspects. First, decoupling preprocessing and training using
different processes2 provides the flexibility in configuring the number of preprocessors such that
the preprocessing throughput can match the trainers’ throughput without creating too many pre-
processors that may waste computing resource and power. Second, as each trainer is associated
with one GPU, resources for training can be allocated in the granularity of GPUs (rather than nodes
as in prior work [Pit18]). Each GPU in a node can be assigned independently to DNNs. Each DNN
in an ensemble can be trained using different numbers of GPUs concurrently, giving flexibility for
handling the heterogeneity in DNNs.
Two-fold Enabling Techniques. The key technical contributions that make FLEET possible
are two-fold. The first is theoretical, consisting of a deep understanding of the resource allocation
problem and some novel algorithms for assigning DNNs to GPUs. The second is empirical, consisting
of a set of solutions to the various challenges for implementing FLEET above the array of complex
software components (TensorFlow, Horovod, Python, MPI, etc.) on a heterogeneous Multi-GPU
supercomputer like SummitDev [Sum]. We present the two-fold contributions in the next two
sections respectively.
5.3 Resource Allocation Algorithms
Efficient ensemble training is essentially an optimal resource allocation problem. The resources
involve CPUs and GPUs in the modern heterogeneous computing clusters. Under the context of data
sharing, an optimal CPU allocation sets the number of preprocessors to be the one that just meets
the computing requirement of training DNNs. GPU allocation, however, is much more complex
and determines the pipeline efficiency. We formalize it as an optimal resource allocation problem
and analyze its computational complexity; the understanding motivates our later designs of the
practical algorithms and the FLEET architecture. We next start with the problem definition.
5.3.1 Problem Definition
There are two possible paradigms for scheduling DNNs on GPUs. A local paradigm assigns a DNN
to a GPU immediately when the GPU becomes vacant. A global paradigm periodically examines
2The reason we used processes instead of threads is due to the Global Interpreter Lock in Python. As FLEET is built onTensorFlow which is in Python, multi-processing brings maximum parallelism into the training pipeline.
65

Table 5.2: Notations.
Notation DescriptionN the number of DNNs in an ensemble.M the number of GPUs available in a cluster.K the number of DNN flotillas.D the list of DNNs in an ensemble,D = [D1, · · · , DN ].F the list of flotillas of DNNs,F = [F1, · · · ,FK ].Fk the k -th flotilla of DNNs,Fk = [D
(k )1 , · · · , D (k )Nk
].
D (k )i the i -th DNN in the k -th flotilla.Nk the number of DNNs in the k -th flotilla.A the list of GPU allocations,A = [A1, · · · , AK ]Ak a Nk -by-M matrix, the GPU allocations for the k -th flotilla of DNNs.
a (k )i , j whether the j -th GPU is assigned to D (k )i .
m (k )i
∑Mj=1 a (k )i , j , the number of GPUs assigned to D (k )i .
r (k )i (m ) the training rate of D (k )i trained with m GPUs.
the remaining DNNs and does a global (re)assignment of the DNNs to all GPUs. The local paradigm
is relatively easy to understand; the global paradigm has the potential to avoid the local optimal
but is more difficult to design. Particularly, to effectively realize the global paradigm, several open
questions must be answered: Is an optimal scheduling algorithm feasible? If so, what is it? If not,
how to efficiently approximate it? This section focuses on the global paradigm and explores these
open questions. For easy reference, we put into Table 5.2 the important notations used in the rest of
this chapter.
In this scheduling problem, the entire execution trains N DNNs on M GPUs in K rounds. The
beginning of a round is the time for globally (re)scheduling remaining DNNs on GPUs. The set of
DNNs being trained in each round is called a flotilla. So there are K flotillas being trained in the
execution, one flotilla a round.
Theoretically, a round can be a time period of an arbitrary length. We first focus on a simple
case where a round finishes when and only when the training of all the DNNs in a flotilla finishes
(e.g., converges or the maximum training epochs reached). In this setting, the GPUs that are done
with its work in the current flotilla earlier than other GPUs would have some idle waiting time. The
simplicity of this setting, however, makes the analysis easy to understand. We will briefly discuss the
complexities of the more general settings at the end of Section 5.3.2.
We now give a formal definition of the resource allocation problem in the focused setting. Each
DNN in the ensemble are placed into at least one of the flotillas Fk , k = 1, · · · , K such that a list
of K flotillasF = [F1, · · · ,FK ] cover all the DNNs. Each flotilla,Fk = [D(k )
1 , · · · , D (k )Nk], contains no
more than M DNNs (i.e., Nk ≤M ) such that each DNN in the flotilla can have at least one GPU.
LetA = [A1, · · · , AK ] be the GPU assignment for the K flotillas of DNNs. Each assignment Ak is a
66

Nk -by-M matrix (a (k )i , j )with:
a (k )i , j =
1, if the j -th GPU is assigned to the model D (k )i ,
0, otherwise,
s .t .Nk∑
i=1
a (k )i , j ≤ 1 ( j = 1, 2, · · · , M ),
M∑
j=1
a (k )i , j ≥ 1 (i = 1, 2, · · · , Nk ).
An optimal resource allocation is an allocation strategy of available GPUs in a cluster to DNNs
in an ensemble such that the end-to-end training time of the DNNs is minimized. The definition is
as follows:
Definition 5.3.1. Optimal Resource Allocation. Given a DNN ensemble D and a cluster of nodes
with totally M GPUs, let T (D|F ,A ) be the end-to-end time to finish the training of all the DNNs
according to the listF and the corresponding GPU assignmentA . The optimal resource allocation
problem is to find a schedule (F ∗,A ∗) such that
F ∗,A ∗ =arg minF ,A
T (D|F ,A ) (5.1)
=arg minF ,A
K∑
k=1
T (Fk |Ak ), (5.2)
where, T (Fk |Ak ) is the time spent on training the DNNs in theFk with the assignment Ak for some
epochs.
5.3.2 Complexity Analysis
In this part, we argue that the Optimal Resource Allocation problem is NP-hard in general. The
argument comes from the classic results in Parallel Task System Scheduling. As Du and Leung have
proved [Du89], finding an optimal non-preemptive schedule for a Parallel Task System with the
precedence constraints consisting of chains is strongly NP-hard for each n > 2 (n is the number
of processors). And, when the precedence constraints are empty, the problem is strongly NP-hard
for each n ≥ 5. The Optimal Resource Allocation problem can be viewed as a parallel task system
scheduling problem with each DNN as a task and each GPU as a parallel processor. One subtle
aspect is that even though the DNNs are independent, to leverage shared preprocessing data among
DNNs, a newly freed GPU does not take on a new DNN until the new round starts. It could be viewed
as there are some pseudo precedence constraints between the DNNs in two adjacent rounds. So in
general, the optimal solution is unlikely to be found in polynomial time. Recall that our discussion
has been assuming that a new round starts only when the training of the DNNs in the previous
67

Algorithm 1 Greedy Algorithm
Input: D, M //DNN ensemble and the number of GPUsOutput: F ,A // A list of flotillas and GPU assignments
1: R = p r o f i l e (D) // Profile training rates of each DNN trained using m = 1, · · · , M number of GPUs.2: F ,A , c a nd s , k = [], [],D, 13: while |c a nd s |> 0 do4: Fk , mk = createFlotilla(c a nd s , R , M ) // Step 1: Create a new flotilla from candidate DNNs; return the
flotilla of DNNs (Fk ) and GPU count vector (mk)5: Ak = getGPUAssignment(Fk , mk) // Step 2: Figure out a GPU assignment for the flotilla6: d e l s = train(Fk , Ak ) // Step 3: Load the latest checkpoint if available; train DNNs in the flotilla for
some epochs; return converged models (d e l s ).7: c a nd s−= d e l s // Remove converged models from candidates (c a nd s )8: F .append(Fk );A .append(Ak ); k+= 1
round is all done. If the condition is relaxed such that a round can be a time period of an arbitrary
length, the problem becomes even more complex to solve.
5.3.3 Greedy Allocation Algorithm
Motivated by the complexity in finding optimal solutions to the problem, we have designed a
greedy algorithm for FLEET to assign DNNs to GPUs efficiently. It is worth noting that, even though
the Optimal Resource Allocation problem connects with the classic Parallel Task System Scheduling,
several special aspects of it make it unique and demand new algorithm designs. First, unlike what
is often assumed in the classic scheduling problems, the length of a task (DNN training) is hard
if ever possible to predict: There is no known method that can accurately predict the number of
epochs (and hence the time) needed for a DNN to converge. Second, the relations among tasks
(DNNs) are “fluid”. The training of two DNNs are theoretically independent: One does not depend
on another’s data or control. But when they are put into the same flotilla, they become related: They
would share the same preprocessed data and hence need to keep a similar progressing pace. These
special aspects make the problem different from prior problems and call for new algorithms to be
designed.
This section describes our algorithm. It first introduces four principles we followed in developing
the solution and then elaborates our greedy algorithm. We will explain the solution in the context of
the global paradigm and discuss how it is also applicable to the local paradigm at the end of this
section.
5.3.3.1 Principles
A resource allocation strategy involves grouping the DNNs into flotillas and assigning the DNNs in
each flotilla to the GPUs. We develop our solution by following four principles. The core of these
principles is to organize tasks with less variation and dependencies at the flotilla level (Principles 1
and 2) and at the node level (Principles 3 and 4).
68

Principle 1. DNNs in the same flotilla should be able to reach a similar training rate (e.g., images per
sec) if a proper number of GPUs are assigned to each of the DNNs.
This principle helps ensure a balanced pace of all GPUs, which helps the DNNs in consuming
the shared preprocessed data in a similar rate to minimize the waiting time of certain GPUs. This
may result in multiple flotillas to be created if not all DNNs in the ensemble are similar.
Principle 2. Packing into one flotilla as many DNNs as possible.
The reason for this principle is two-fold. First, the throughput of multi-GPU training scales
sublinearly3 with the number of GPUs due to the communication overhead of exchanging gradients.
The principle is to help maintain good efficiency of the DNNs. Second, it allows more DNNs to share
preprocessed data.
Principle 3. When assigning multiple GPUs to a DNN, try to use GPUs in the same node.
This principle is to reduce the variation in communication latency: inter-node communications
are slower and have more variations than intra-node communications.
Principle 4. Try to assign DNNs that need a small number of GPUs to the same node.
This principle is similar to Principle 2 but at the node level. The rationale is that, although it
is hard to reduce the communication overhead of DNNs that need to be trained using multiple
nodes, we can minimize the communication overhead of DNNs that need a small number of GPUs
by assigning them to the GPUs in the same node.
Based on the four principles, we propose a greedy algorithm to solve the resource allocation
problem, as described below.
5.3.3.2 Algorithm
The greedy algorithm is shown in Algorithm 1. It uses training rates of the DNNs, R = {ri (m )}, i =
1, · · · , N , m = 1, · · · , M , which are attained through a short profiling process (line 1). We propose
profiling of fewer than 50 batches of training for each DNN. We defer the detailed profiling process
to Section 5.5.1.
The greedy algorithm dynamically determines the grouping of the DNNs in an ensemble based
on whether the DNN is converged or not and the training rate of each DNN. Once a flotilla is created,
an optimal GPU assignment can be derived. Initially, all DNNs are considered as candidates (cands)
when a new flotilla needs to be created (line 2). The greedy algorithm then iterates over three main
steps, flotilla creation (line 4), GPU allocation (line 5), and training (line 6), until all the DNNs in the
ensemble are converged (i, e, cands are empty).
We next describe the three steps in detail.
3If all DNNs in an ensemble has a perfect linear scaling in throughput, training the DNNs one after another wouldbe the optimal strategy. It is however often not the case in our observation. Another practical reason for concurrentlytraining multiple DNNs is hyperparameter tuning. By checking the intermediate training results of those DNNs, theunpromising ones can be discarded.
69

Algorithm 2 createFlotilla
Input: c a nd s , R , M // The indices of DNNs that are not converged, the training rates of the DNNs, and thenumber of GPUs available
Output: Fk , mk // the k -th flotilla and the GPU count vector1: Df a s t , r f a s t = fastestDNN(c a nd s , R ) // Find the DNN with the largest training rate with a single GPU2: Fk , Mk , mk = [Df a s t ], 1, [1]3: while |Fk |< |c a nd s | do4: Db e s t , rb e s t , Mb e s t = findNext(r f a s t , R , c a nd s ,Fk , M −Mk ) // Find the next DNN, its training rate and
required GPU count5: if Db e s t ==−1 then6: break7: Fk .append(Db e s t )8: mk.append(Mb e s t )9: Mk+=Mb e s t
10: while Mk <M do11: Ds l o w = s l o w e s t D N N (Fk , mk , R ) // in terms of speed on the currently assigned GPUs12: mk[s l o w ]+ = 113: Mk+= 1
5.3.3.2.1 Flotilla Creation
This first step selects a set of DNNs from candidates to create a new flotilla whose DNNs are trained
concurrently with data sharing, following Principles 1 and 2. The algorithm first identifies the largest
training rate with a single GPU, r f a s t = max{r1(1), · · · , r|c a nd s |(1)}, and the corresponding DNN,
Df a s t , from the candidate set of DNNs. Then r f a s t is used as the reference training rate to search
for other DNNs that can be placed in the same flotilla. Mathematically, the algorithm searches for
the next DNN that can be placed into the flotilla by solving the following optimization problem:
minDi∈c a nd s−Fk ,
m=1,··· ,M
|ri (m )− r f a s t |,
s .t . |ri (m )− r f a s t | ≤δ,
m ≤M −Mk , (5.3)
where δ is the threshold that determines if two training rates are close, and Mk is the total number
of GPUs that are already assigned to DNNs. In our experiments, δ is set to 20 (images/sec). The
algorithm stops adding DNNs to a flotilla if no solution exists to Eq. 5.3.
After a flotilla is formed, if there are still GPUs available, we assign the next GPU to the DNN in
the flotilla that has the smallest training rate iteratively until all the GPUs are assigned. The DNN
with the smallest training rate determines the pipeline efficiency. Assigning extra GPUs to the slowest
DNN can improve pipeline efficiency.
Algorithm 2 shows the flotilla creation algorithm. Flotilla creation first searches for the reference
training rate (line 1, time complexity O (N )), then iteratively finds the best candidate DNN to add in
the flotilla (lines 3-11, time complexity O (Nk ×N ×M ), and finally assigns all the remaining GPUs
70

Algorithm 3 getGPUAssignment
Input: Fk , mk // The k -th flotilla and the GPU count vectorOutput: Ak
1: j = 1 // The current available GPU with the smallest index.2: Ak = 0Nk ,M // The GPU assignment matrix of dimension Nk ×M3: r e ma i ni ng = {1, · · · , N } // The indices of DNNs to allocate GPUs4: a s s i g ne d = {} // The indices of DNNs that have assigned GPUs5: for all i ∈ r e ma i ni ng do6: if m (k )
i %G PU s P e r N o d e == 0 then7: a s s i g ne d .add(i )8: j = assignGPUs(Ak , i , j , m (k )
i )9: r e ma i ni ng -= a s s i g ne d
10: memo, assigned = {}, {}11: for all i ∈ r e ma i ni ng do12: if −m (k )
i %G PU s P e r N o d e not in me mo then
13: me mo [m (k )i %G PU s P e r N o d e ] = i
14: else15: for i i ∈ {i , me mo [−m (k )
i %G PU s P e r N o d e ]} do16: a s s i g ne d .add(ii)17: j = assignGPUs(Ak , i i , j , m (k )
i i )
18: del me mo [m (k )i %G PU s P e r N o d e ]
19: r e ma i ni ng -= a s s i g ne d20: if |r e ma i ni ng |> 0 then21: m(k ), b e s t S c o r e , b e s t A, jc o p y , Ac o p y = [],∞, j , c l o ne (Ak )22: for all i ∈ r e ma i ni ng do23: m(k ).append((i , m (k )
i ))24: for p e r m u t a t i o n in allPermutations(m(k )) do25: j , Ak = jc o p y , c l o ne (Ac o p y )26: for i , m (k )
i in p e r m u t a t i o n do
27: j = assignGPUs(Ak , i , j , m (k )i )
28: s c o r e = calculateScore(Ak ) // Score is calculated based on the loss function in Eq. 729: if s c o r e < b e s t S c o r e then30: b e s t S c o r e , b e s t A = s c o r e , Ak
31: Ak = b e s t A
Algorithm 4 assignGPUs
Input: Ak , i , j , m (k )i
Output: j // The index of the next available GPU to assign1: while m (k )
i > 0 do
2: a ki , j = 1; j+= 1; m (k )
i −= 1
71

available to the DNNs in the flotilla (lines 12- 15, time complexityO (Nk×M )). So the time complexity
of flotilla creation is O (Nk ×N ×M ).
The flotilla creation step produces a flotilla of DNNs as well as the GPU count vector that specifies
the number of GPUs assigned to each DNN. We next explain how to properly assign GPUs to each
DNN based on the GPU count vector and considering GPU locality.
5.3.3.2.2 GPU Assignment
This procedure assigns GPUs to DNNs in a flotilla, following Principles 3 and 4. The goal of this
procedure is to find an assignment Ak to minimize the number of nodes involved in training each
DNN. Let c (.) be the function that counts the number of nodes involved in training a DNN given its
GPU assignment a(k )i , which is the i -th row of the assignment matrix Ak , the GPU assignment is an
optimization problem:
minAk
Nk∑
i=1
c (a(k )i )
m (k )i
,
s .t .M∑
j=1
a ki , j =m (k )
i , i = 1, · · · , N , (5.4)
wherec (a(k )i )
m (k )i
is the number of nodes involved to train the i -th DNN, scaled by m (k )i , the number of
GPUs assigned. The solution space is as large as M !∏Nk
i=1(m(k )i !)
.
Instead of exhaustively searching for an optimal solution in the space, we propose a greedy
approach that assigns GPUs to each DNN in an incremental fashion. For example, if the j -th GPU is
already assigned to a DNN, then the next GPU to be assigned to the DNN is the j +1-th GPU. The
solution space is reduced to the space of possible permutations of the GPU count vector (Nk !).
The algorithm is shown in Algorithm 3. This algorithm assumes the number of GPUs per node is
the same among nodes (GPUsPerNode), which holds in major supercomputers. It first prunes the
factorial solution space by identifying and assigning GPUs to the DNNs whose training rate meets
certain requirements in O (Nk ) time complexity. It then searches for the optimal GPU assignment
strategy for the remaining DNNs. It assigns GPUs to DNNs in the following order:
1. the DNNs whose required number of GPUs is a multiple of the number of GPUs per node;
(lines 5-11)
2. the pairs of DNNs whose sum of the required number of GPUs is a multiple of the number of
GPUs per node; (lines 12-24)
3. the remaining DNNs by searching for an optimal assignment of GPUs. (lines 25-39)
Let N ′k be the number of remaining DNNs. The solution space is N ′
k !. Most of the time, N ′k is
a small number less than five. However, enumerating all the possible solutions is still in factorial
72

time complexity. We set the maximum number of solutions to explore as 1024, reducing the time
complexity to O (1). The time complexity of GPU assignment is thus O (Nk ).
The flotilla creation and GPU assignment steps ensure that DNNs in the same flotilla can achieve
similar training rate to improve GPU utilization. We next describe how the training step addresses
the varying convergence speed issue via check-pointing.
5.3.3.2.3 Training
The training step trains the DNNs on their assigned GPUs concurrently with data sharing. Due to
the architectural difference of DNNs in a heterogeneous ensemble, these DNNs require a different
number of epochs to converge. With data sharing, converged models need to wait for the un-
converged models to complete, leading to the waste of computing resources. We leverage check-
pointing to address the varying convergence speed issue. Specifically, each flotilla is trained until
only α ·M GPUs remain active for training. α is set to 0.8 in all our experiments. We monitor whether
a model is converged at the end of each epoch. Once a model is converged, it is marked as complete
and its GPUs are released. If the total number of GPUs that are not released falls below α ·M , the
training of all the DNNs in the flotilla stops. The parameters, loss history, and epoch count of all the
DNNs are check-pointed for recovering their training later. A DNN marked as complete will not be
packed into any of the following flotillas.
5.3.3.3 Application in the Local Paradigm
Although the discussion has been assuming the global paradigm, the greedy algorithm applies the
local paradigm of resource allocation as well. The training proceeds as follows: (1) At the beginning,
the algorithm forms the first flotilla of DNNs and starts training them. (2) Whenever a DNN is done,
the algorithm fills the released GPUs with new DNNs. If no DNN remains untrained, terminate when
all current training is done.
5.4 Implementation
This section describes an efficient training pipeline implementation of FLEET. We focus on the
following two main implementation challenges:
Challenge 1: Recall that FLEET has two types of processes, preprocessor and trainer. The number
of preprocessors needs to be set to meet the requirement of trainers’ throughput. Thus, it is necessary
for FLEET to support creating a different number of processes per node on a cluster and also enable
flexible communications between preprocessors and trainers.
Challenge 2: With data-parallel DNN training, preprocessed data from a processor is received
by its paired training group master, scattered to trainers within the group (including the training
group master), and broadcasted to the other training group masters. How do we build the dataflow
to enable efficient training pipeline?
We next describe the solutions and the implementation details.
73
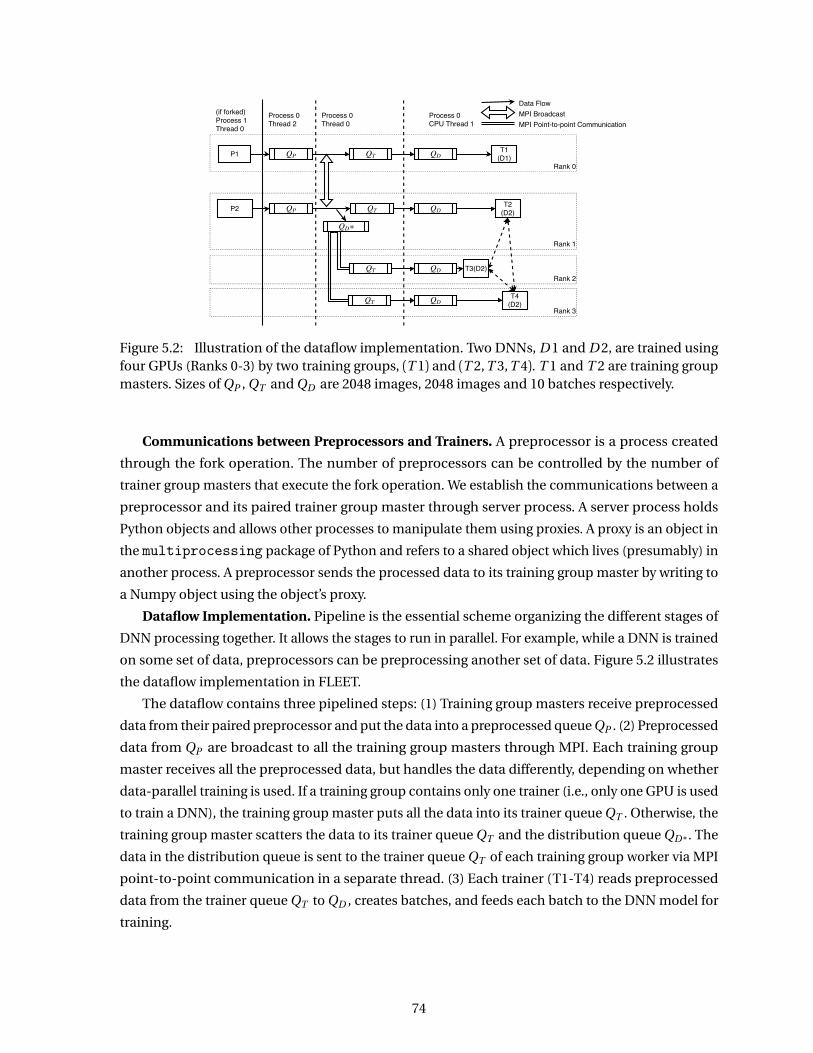
Rank 3
Rank 2
Rank 1
Rank 0P1
P2
QP QT
QP QT
QD
QD
QT QD
QT
QD
∗QD
T1 (D1)
T2 (D2)
T3(D2)
T4 (D2)
Process 0 CPU Thread 1
(if forked) Process 1 Thread 0
Process 0 Thread 0
Process 0 Thread 2
Data Flow MPI Broadcast MPI Point-to-point Communication
Figure 5.2: Illustration of the dataflow implementation. Two DNNs, D 1 and D 2, are trained usingfour GPUs (Ranks 0-3) by two training groups, (T 1) and (T 2, T 3, T 4). T 1 and T 2 are training groupmasters. Sizes of QP , QT and QD are 2048 images, 2048 images and 10 batches respectively.
Communications between Preprocessors and Trainers. A preprocessor is a process created
through the fork operation. The number of preprocessors can be controlled by the number of
trainer group masters that execute the fork operation. We establish the communications between a
preprocessor and its paired trainer group master through server process. A server process holds
Python objects and allows other processes to manipulate them using proxies. A proxy is an object in
the multiprocessing package of Python and refers to a shared object which lives (presumably) in
another process. A preprocessor sends the processed data to its training group master by writing to
a Numpy object using the object’s proxy.
Dataflow Implementation. Pipeline is the essential scheme organizing the different stages of
DNN processing together. It allows the stages to run in parallel. For example, while a DNN is trained
on some set of data, preprocessors can be preprocessing another set of data. Figure 5.2 illustrates
the dataflow implementation in FLEET.
The dataflow contains three pipelined steps: (1) Training group masters receive preprocessed
data from their paired preprocessor and put the data into a preprocessed queue QP . (2) Preprocessed
data from QP are broadcast to all the training group masters through MPI. Each training group
master receives all the preprocessed data, but handles the data differently, depending on whether
data-parallel training is used. If a training group contains only one trainer (i.e., only one GPU is used
to train a DNN), the training group master puts all the data into its trainer queue QT . Otherwise, the
training group master scatters the data to its trainer queue QT and the distribution queue QD ∗ . The
data in the distribution queue is sent to the trainer queue QT of each training group worker via MPI
point-to-point communication in a separate thread. (3) Each trainer (T1-T4) reads preprocessed
data from the trainer queue QT to QD , creates batches, and feeds each batch to the DNN model for
training.
74

Model Size
Trai
ning
Rat
e (#
GPU
=1)
Epoc
hs
0
50
100
150
200
0
5
10
15
20
25
250 500 750 1000
Training Rate Epochs
Figure 5.3: Correlations between model size of a DNN and the training rate and the number ofepochs until convergence.
5.5 Evaluations
We conduct a set of experiments to examine the efficacy of FLEET by answering the following
questions: (1) How much speedup can FLEET bring to ensemble training of heterogeneous DNNs?
(2) How do the pros and cons of the two paradigms in FLEET designs, local and global, play out in
handling the variations among DNNs? More specifically, does the greedy scheduling algorithm in
FLEET produce favorable schedules? How much waiting time does the round-by-round scheme in
FLEET cause, compared to eager scheduling schemes? (3) What is the overhead of runtime profiling,
scheduling, and checkpointing in FLEET?
We first describe the experiment settings (machines, baselines, etc.) in Section 5.5.1 and then
report our experiment results in Sections 5.5.2 and 5.5.3 to answer the questions.
5.5.1 Experiment Settings
5.5.1.1 DNNs
The DNNs used in this experiment are derived from DenseNets [Hua17] and ResNets [He16]. Both
models are the state-of-the-art network architectures that achieve high performance in various
learning tasks. We select these networks as the basis because, as structural DNNs, they are composed
of many Convolutional blocks, which have a standard interface making a block ready to be connected
with any other blocks. As a result, it is easy to derive new DNNs from them—one just needs to remove
or insert some Convolutional blocks.
We derive 100 experimental DNNs from six popular DNNs: DenseNet-121/169/201 and ResNet-
50/101/152. The first three are variations of DenseNets [Hua17]. The three variations share the same
75

structure, but differ in the number of DNN layers, indicated by their suffixes. The latter three are
variations of ResNets [He16].
The sizes of the DNN models vary from 232MB to 1.19GB. The distribution of their training
rates on a single GPU which vary from 21 to 176 images/sec. Different DNNs have different GPU
memory requirements and thus require different batch sizes to maximize GPU utilization. For
each, we use the maximum batch size that can fit into GPU’s memory. Figure 5.3 outlines the
relations between the training rates and model sizes of the DNNs, as well as the relations between
convergence rates (i.e., the number of epochs needed for the DNNs to converge) and their model
sizes. As model size increases, the training rate tends to drop as more computations are involved
in the DNN, but there are no clear correlations with the convergence rate. It is the reason that the
resource allocation algorithm in FLEET primarily considers training rate explicitly, and relies on the
periodical (re)scheduling to indirectly adapt to the variations of DNNs in the converging rates.
5.5.1.2 System
All experiments are conducted on SummitDev [Sum], a development machine for Summit super-
computer at Oak Ridge National Lab. Each node is equipped with two IBM POWER8 CPUs and
256GB DRAM, and four NVIDIA Tesla P100 GPUs. Each POWER8 CPU has 10 cores with 8 HW threads
each. The default SMT level is set to one unless noted otherwise. The number of cores allocated per
GPU is five in all the experiments. NVLink 1.0 is the connection among all GPUs and between CPUs
and GPUs within a node. EDR InfiniBand connects different nodes in a full fat-tree. The file system
is an IBM Spectrum Scale file system, which provides 2.5 TB/s for sequential I/O and 2.2 TB/s for
random I/O. Our experiments show that thanks to the large I/O throughput of the file system, I/O is
not the bottleneck of DNN training. The used CUDA version is 9.2.
FLEET is built on Tensorflow 1.12 (as the core training engine), Horovod v0.15.2 [Ser18] (as
the basis for distributed DNN training), and mpi4py v3.0.0 (for the pipeline construction). We set
inter_op_parallelism_threads and intra_op_parallelism_threads to # logical cores
for parallel TensorFlow operaitons on CPU. The used CUDA version is 9.2.
5.5.1.3 Profiling
To minimize the overhead of profiling, we only profile the training rates of each DNN in the ensemble
with the number of GPUs varying from one to Mt (Mt <M ), where Mt is determined based on the
training rates of each DNN on a single GPU. For profiling on m (m = 1, · · · , Mt ) GPUs, we train a
DNN for a maximum of 48 batches and use the training time of the last 20 batches to calculate the
exact training rate: ri (m ), i = 1, · · · , N . Based on the profiled training rates, we estimate the training
rates of each DNN when m >Mt .
Specifically, the profiling has three steps:
1. Collect the training rates of each DNN on a single GPU, R (1) = {ri (1)}, i = 1, · · · , N .
76

1 2 3 4 5 6 7 8Number of GPUs
0
200
400
600
800
1000
Trai
ning
Rat
e
Figure 5.4: The profiled training rates (images/sec) of 100 DNNs in an ensemble with Imagenet.
2. Estimate the number of GPUs required to make the DNN that has the smallest training rate
on a single GPU achieve the largest single-GPU training rate, Ma =�max(R (1))
min(R (1))
�
.
3. Collect the training rates of each DNN with the number of GPUs varying from two to Mt =
max(Ma , Mb ), where Mb = 2×G PU s P e r N o d e .
Note that steps 1 and 3 can be done in parallel because the trainings of different DNNs with
different number of GPUs are independent. The training rate of the i -th DNN with the number of
GPUs higher than Mt is estimated via the following equation:
ri (m ) =m ×ri (Mb )
Mb� ri (Mb )
ri (Mb −1)×
Mb −1
Mb
�m−Mb. (5.5)
The formula for Mb and Equation 5.5 are the result of performance modeling on our observations
on the DNN performance trend as illustrated in Figure 5.4. It achieves a good tradeoff between the
profiling cost and the performance prediction accuracy.
The profiling process also measures the throughput of a range of preprocessors (#cores=1, 2, 4,
8, 16, 32) in the pipeline. This step is quick since preprocessing does not exhibit large variations.
Based on the profiled information, FLEET calculates the minimum number of preprocessors that
can meet the demands of an arbitrary M DNNs (with one running on one GPU), and uses it to set
the number of preprocessors.
5.5.1.4 Counterparts for Comparisons
• Baseline The baseline uses the default TensorFlow to train each DNN on one GPU indepen-
dently. Each DNN trainer has a preprocessor that preprocesses data for itself independently. A
GPU randomly picks one yet-to-be-trained DNN whenever it becomes free until there are no
DNN left.
• Homogeneous Training This is the state-of-the-art framework recently published [Pit18] for
ensemble DNN training. This framework allows the DNNs that get trained at the same time to
77

0
0.5
1
1.5
2
2.5
(20,100) (40,100) (60,100) (80,100) (100,100) (120,100) (140,100) (160,100)
Sp
ee
du
p
(#GPUs, #DNNs)
Homogeneous[24]FLEET-L
FLEET-G
Figure 5.5: The averaged speedups over the baseline in terms of the end-to-end time for training a100-DNN ensemble. The error bars show the variations.
share the preprocessed data. But it is designed for homogeneous DNN training, assuming no
variations among DNNs or the situation where the number of DNNs is no greater than the
number of GPUs. In our experiments, when there are more DNNs than GPUs, the framework
randomly picks a subset of the remaining DNNs to train, one DNN per GPU with shared
preprocessed data. After that subset is done, it picks another subset and repeats the process
until all DNNs are done.
• FLEET-G This is FLEET in the global paradigm.
• FLEET-L This is FLEET in the local paradigm as described in Section 5.3.3.3. Its difference
from FLEET-G is that as soon as a DNN is done, the released GPUs are immediately used to
train some remaining DNNs; which DNNs are picked is determined by the greedy algorithm
as in FLEET-G, but only locally (for the newly released GPUs) rather than globally.
5.5.2 End-to-End Speedups
Figure 5.5 reports the speedups of the three methods over the baseline method, in terms of the
end-to-end ensemble training time of the 100 DNNs. All runtime overhead for FLEET is included.
We repeat each measurement multiple times and report the average and error bars.
It shows the results in eight settings. The prior homogeneous framework shows large slowdowns
in the first four settings where the number of GPUs is less than the number of DNNs. The slowdowns
78

Wai
t tim
e/#G
PU in
sec
onds
5.0
10.0
50.0
100.0
20 GPU 100 DNN
40 GPU 100 DNN
60 GPU 100 DNN
80 GPU 100 DNN
100 GPU 100 DNN
120 GPU 100 DNN
140 GPU 100 DNN
160 GPU 100 DNN
Homogeneous[24] FLEET-L FLEET-G
Figure 5.6: Waiting time per GPU.
are due to the waiting of other GPUs for the slowest DNN to finish in each round, shown in Figure 5.6.
In the other four settings, the homogeneous framework performs similarly as the baseline does: As
there are more GPUs than DNNs, there is only one round, in which, the two methods use resource
similarly. The sharing of preprocessing in the homogeneous framework does not generate speedups
for these DNN trainings because the preprocessing is not the bottleneck for them.
FLEET-G gives the best overall performance, producing 1.12-1.92X speedups over the baseline.
The primary reason for the speedups come from its better resource allocation to the DNNs. The
bottom of Table 5.3 reports the mean and standard deviations of the running lengths of DNNs in
the first five flotillas in FLEET-G (80GPU,100DNN). In comparison to the data in the baseline and
FLEET-L (top rows in Table 5.3), the DNNs show much smaller variations in length, which indicate
the effectiveness of the GPU allocations in FLEET-G in evening out the differences among DNNs. At
the beginning, we thought that the catch to FLEET-G is the waiting time of some GPUs after they are
done with their work in a round. Our experiments, however, show the opposite effects. As Figure
5.6 shows, the average waiting time per GPU is smallest for FLEET-G. The reason is that the other
methods all suffer long waiting time at the end; because of their suboptimal resource allocation,
some GPUs have to work long after others to finish up the last few DNNs. FLEET-L gives notable but
fewer speedups for its less favorable decisions at resource allocation due to the local view.
Overall, FLEET gives larger speedups when #GPU > #DNN. It is worth noting that in such a
setting, there are still many flotillas to schedule and FLEET scheduler plays an important role.
The reason is that in many cases, the FLEET scheduler assigns multiple GPUs to one DNN. For
instance, 20 flotillas were created when training 100 DNN on 120 GPUs and 22 flotillas were created
when training 100 DNNs on 160 GPUs. When #GPU<#DNN, the speedups from FLEET are not that
significant but still substantial: 113–120% for three out of the four such settings in Figure 5.5.
79

Table 5.3: Mean and standard deviation of the running length of DNNs in seconds. (80 GPUs, 100DNNs)
Technique Flotilla ID Mean Std. Dev.
Baseline - 10372.2 4178.9FLEET-L - 6213 3580.0
0 2067.9 54.71 335.6 48.42 2291.9 26.0
FLEET-G 3 415.5 51.94 1072.2 364.05 2322.3 216.0
Table 5.4: Scheduling and checkpointing overhead.
(#GPU,#DNN)
Total TrainingTime (in sec)
SchedulingOverhead
CheckpointingOverhead
in sec in % in sec in %(20,100) 55200.1 20.1 0.037 1496.0 2.7(40,100) 30204.8 15.8 0.054 1156.0 3.8(60,100) 24495.0 14.0 0.060 986.0 4.0(80,100) 21891.0 12.0 0.057 816.0 3.7(100,100) 18359.1 10.1 0.058 782.0 4.3(120,100) 15323.9 9.9 0.068 680.0 4.4(140,100) 13366.3 9.3 0.073 680.0 5.1(160,100) 11825.2 10.2 0.092 748.0 6.3
5.5.3 Overhead
Table 5.4 reports the breakdown of the runtime overhead of FLEET-G. The overhead of scheduling
and checkpointing is at most 0.1% and 6.3% of the end-to-end training time in all the settings. Recall
that, due to wall-clock-time limitation of SummitDev, we have used the small Caltech256 dataset.
For large datasets (e.g., ImageNet), the overhead would become negligible. The profiling overhead
is independent of dataset size and solely depends on ensemble size. Recall that, profiling needs
the DNN to train for only a few steps in parallel. Its overhead is marginal for typical DNN trainings
on large datasets that take hours or days to train. On recent GPUs, a feature called Multi-Process
Services (MPS) could potentially allow multiple DNNs to be co-scheduled to a single GPU and
run concurrently. It is not considered in the current FLEET. To consider it, some co-run predictive
models could help, which could quickly predict the performance of a DNN when it co-runs with a
set of other DNNs on one GPU. The predictive performance can then be combined with the existing
performance models in FLEET to guide the scheduling of DNNs.
5.6 Related Work
Much research has been done to accelerate the training of a single DNN over distributed sys-
tems, such as Tensorflow from Google [Dea12; Aba15], Project Adams from Microsoft [Chi14], Fire-
Caffe [Ian16a], PipeDream [Har18], and GPipe [Hua18]. All those studies have focused on improving
the training speed of an individual DNN rather than ensemble training.
80

Recently, ensemble training starts drawing more attention. Besides the work by Pittman et
al. [Pit18], there are some other efforts [Gar18; Los16] on ensemble training, but they focus on
designing lightweight methods to form high-performing ensembles instead of improving pipeline
efficiency of ensemble training. HiveMind [Nar18] is a system designed for accelerating the training
of multiple DNNs on a single GPU by fusing common operations (e.g., preprocessing) across models.
It, however, lacks the essential support for distributed DNN training.
Another line of research that is relevant to this work is task scheduling on clusters or workflow
management systems. The scheduling of a set of tasks or workloads on clusters or multiproces-
sor systems has been extensively studied in the literature [Tur92; Shm95; Urg02; Aug11; Zah08;
Gra15; Cho16; Xu18; Ous13; Che16; Del14; Fei97]. Recent work including Gandiva [Xia18] and Tire-
sias [Gu19] design GPU cluster managers tailored for DNN workloads. They, however, lack the
flexibility supported in FLEET. First, they treat different jobs as independent black boxes. With-
out the MPI communication mechanisms we put into FLEET to enable flexible data exchanges of
TensorFlow-based workers and preprocessors, these schedulers cannot flexibly adjust the number of
workers for a DNN training. Second, as they treat the DNNs as separate jobs, they cannot support the
coordinations across DNNs in an ensemble, such as, the sharing of preprocessed data, cooperated
checkpointing at the appropriate times.
Load balancing techniques for parallel computers such as nearest neighbor assignment to
dynamically distribute workloads have been studied in [Kum94]. The way FLEET distributes DNN
training workloads are fundamentally different because an initial task assignment is not set at the
beginning but dynamically determined based on both the convergence status and the training rate
of each DNN.
HPC schedulers or workflow management systems schedule batch jobs on HPC systems. They
however cannot work directly with DNN ensembles. First, they treat different jobs as independent
black boxes. Without the MPI communication mechanisms we put into FLEET to enable flexible data
exchanges of TensorFlow-based workers and preprocessors, these schedulers cannot flexibly adjust
the number of workers for a DNN training. Second, as they treat the DNNs as separate jobs, they
cannot support the coordinations across DNNs in an ensemble, such as, the sharing of preprocessed
data, cooperated checkpointing at the appropriate times.
5.7 Conclusions
This chapter presented a systematic exploration on enabling flexible efficient ensemble training
for heterogeneous DNNs. It addressed two-fold challenges. First, it formalized the essence of the
problem into an optimal resource allocation problem, analyzes its computational complexity, and
presented an efficient greedy algorithm to effectively map DNNs to GPUs on the fly. Second, it
developed a set of techniques to seamlessly integrate distributed data-parallel training of DNN,
preprocessing sharing, and runtime DNN-to-GPU assignments together into a software framework,
FLEET. Experiments on 100 heterogeneous DNNs on SummitDev demonstrated that FLEET can
81

speed up the ensemble training by 1.12-1.92X over the default training method, and 1.23-1.97X over
the state-of-the-art framework that was designed for homogeneous ensemble training.
82

CHAPTER
6
IN-PLACE ZERO-SPACE MEMORY
PROTECTION FOR CNN
6.1 Introduction
As CNNs are increasingly explored for safety-critical applications such as autonomous vehicles and
aerospace, reliability of CNN inference is becoming an important concern. A key threat is memory
faults (e.g., bit flips in memory), which may result from environment perturbations, temperature
variations, voltage scaling, manufacturing defects, wear-out, and radiation-induced soft errors.
These faults change the stored data (e.g., CNN parameters), which may cause large deviations of
the inference results [Li17; Rea18; Rea16]. In this work, fault rate is defined as the ratio between the
number of bit flips experienced before correction is applied and the total number of bits.
Existing solutions have resorted to general memory fault protection mechanisms, such as Error
Correction Codes (ECC) hardware [Sri15], spatial redundancy, and radiation hardening [Yu10].
Being CNN-oblivious, these protections incur large costs. ECC, for instance, uses eight extra bits
in protecting 64-bit memory; spatial redundancy requires at least two copies of CNN parameters
to correct one error (called Triple Modular Redundancy (TMR) [Lyo62]); radiation hardening is
subject to substantial area overhead and hardware cost. The spatial, energy, and hardware costs
are especially concerning for safety-critical CNN inferences; as they often execute on resource-
constrained (mobile) devices, the costs worsen the limit on model size and capacity, and increase
the cost of the overall AI solution.
To address the fundamental tension between the needs for reliability and the needs for space/en-
ergy/cost efficiency, this work proposes the first zero space cost memory protection for CNNs. The
83

design capitalizes on the opportunities brought by the distinctive properties of CNNs. It further am-
plifies the opportunities by introducing a novel training scheme, Weight Distribution-Oriented Train-
ing (WOT), to regularize the weight distributions of CNNs such that they become more amenable
for zero-space protection. It then introduces a novel protection method, in-place zero-space ECC,
which removes all space cost of ECC protection while preserving protection guarantees.
Experiments on VGG16, ResNet-18, and SqueezeNet validate the effectiveness of the proposed
solution. Across all tested scenarios, the method provides protections consistently comparable
to those offered by existing hardware ECC logic, while removing all space costs. It hence offers a
promising replacement of existing protection schemes for CNNs.
6.2 Premises and Scopes
This work focuses on protections of 8-bit quantized CNN models. On the one hand, although the
optimal bit width for a network depends on its weight distribution and might be lower than 8, we
have observed that 8-bit quantization is a prevalent, robust, and general choice to reduce model
size and latency while preserving accuracy. In our experiments, both activations and weights are
quantized to 8-bit. Existing libraries that support quantized CNNs (e.g. NVIDIA TensorRT [Mig17],
Intel MKL-DNN [Mkl], Google’s GEMMLOWP [Jac17], Facebook’s QNNPACK [Qnn]) mainly target for
fast operators using 8-bit instead of lower bit width. On the other hand, previous studies [Li17; Rea18]
have suggested that CNNs should use data types that provide just-enough numeric value range and
precision to increase its fault tolerance. Our explorations on using higher precision including float32
for representing CNN parameters also show that 8-bit quantized models are the most resilient to
memory faults.
The quantization algorithm we used is symmetric range-based linear quantization that is well-
supported by major CNN frameworks (e.g. Tensorflow [Jac18], Pytorch [Zmo18]). Specifically, let
X be a floating-point tensor and X q be the 8-bit quantized version. X can be either weights or
activations from a CNN. The quantization is based on the following formula:
X q = r o und (X2n−1−1
max{|X |}), (6.1)
where n is the number of bits used for quantization. In our case, n = 8. The number of bits used for
accumulation is 32. Biases, if exist, are quantized to 32 bit integer.
Our work protects only weights for two reasons. Firstly, weights are usually kept in the mem-
ory. The longer they are kept, the higher the number of bit flips they will suffer from. This easily
results in a high fault rate (e.g. 1e-3) for weights. Activations, however, are useful only during an
inference process. Given the slight chance of having a bit flip during an inference process (usually
in milliseconds), protecting activations is not as pressing as protecting weights. Secondly, previous
work [Rea18] has shown that activations are much less sensitive to faults compared with weights.
84

Table 6.1: Accuracy and weight distribution of 8-bit quantized CNN models on ImageNet. Thepercentage rows use absolute values.
Model AlexNet VGG16 VGG16_bn Inception-V3 ResNet-18 ResNet-34 ResNet-50 ResNet-152 SqueezeNet#weights 61.1M 138.4M 138.4M 27.1M 11.7M 21.8M 25.5M 60.1M 1.2M
Accuracy(%)
Float32 56.52 71.59 73.36 69.54 69.76 73.31 76.13 78.31 58.09Int8 55.8 71.51 72.01 68.07 69.07 72.83 75.33 77.79 57.01
Percentage(%)
[0, 32) 95.09 97.69 98.83 97.98 99.66 99.76 99.65 99.49 95.16[32, 64) 4.88 2.27 1.16 1.96 0.32 0.23 0.34 0.49 4.62[64, 128] 0.03 0.04 0.01 0.06 0.02 0.01 0.01 0.01 0.22
1 2 3 4 5 6 7 8position
050
100150200250300350400
coun
t
Figure 6.1: Large weight (beyond [−64,63]) distributions in 8-byte (64-bit data) blocks forSqueezeNet on ImageNet. For instance, the first bar in (a) shows that of all the 8-byte data blocksstoring weights, around 380 have a large weight at the first byte.
Error Correction Codes (ECC) is commonly used in computer systems to correct memory faults.
They are usually described as (k , d , t ) code for length k code word, length d data, and t -bit error
correction. The number of required check bits is k −d .
6.3 In-Place Zero-Space ECC
Our proposed method, in-place zero-space ECC, builds on the following observation:Weights of a
well-trained CNN are mostly small values. The Percentage rows in Table 6.1 show the distributions
of the absolute values of weights in some popular 8-bit quantized CNN models. The absolute values
of more than 99% of the weights are less than 64. Even though eight bits are used to represent each
weight, if we already know that the absolute value of a weight is less than 64, the number of effective
bits to represent the value would be at most seven, and the remaining bit could be possibly used for
other purposes—such as error correction. We call it a non-informative bit.
The core idea of in-place zero-space ECC is to use non-informative bits in CNN parameters to
store error check bits. For example, the commonly used SEC-DED (64, 57, 1) code uses seven check
85

bits to protect 57 data bits for single error correction; they together form a 64-bit code word. If seven
out of eight consecutive weights are in range [−64,63], we can then have seven non-informative
bits, one per small weight. The essential idea of in-place ECC is to use these non-informative bits to
store the error check bits for the eight weights. By embedding the check bits into the data, it can
hence avoid all space cost.
For the in-place ECC to work, there cannot be more than one large weight in every 8 consecutive
weights. And the implementation has to record the locations of the large weights such that the
decoding step can find the error check bits from the data. It is, however, important to note that the
requirement of recording the locations of large weights would disappear if the large weights are
regularly distributed in data—an example is that the only place in which a large weight could appear
is the last byte of an 8-byte block. However, the distributions of large weights in CNNs are close to
uniform, as Figure 6.1 shows.
6.3.1 WOT
To eliminate the need of storing large weight locations in in-place ECC, we enhance our design
by introducing a new training scheme, namely weight-distribution oriented training (WOT). WOT
aims to regularize the spatial distribution of large weights such that large values can appear only at
specific places. We first formalize the WOT problem and then elaborate our regularized training
process.
Let Wl be the float32 parameters (including both weights and biases) in the l -th convolutional
layer and Wq
l be their values after quantization. Note that WOT applies to fully-connected layers as
well even though our discussion focuses on convolutional layers. WOT minimizes the sum of the
standard cross entropy loss ( f ({W ql }
Ll=1)) and weighted weight regularization loss (Frobenius norm
with the hyperparameter λ) subject to some weight distribution constraints on the weights:
min{W q
l }f ({W q
l }Ll=1) +λ
L∑
l=1
‖W ql ‖
2F , (6.2)
s .t . Wq
l ∈ Sl , l = 1, · · · , L . (6.3)
The weights are a four-dimensional tensor. If flattened, it is a vector of length Nl ×Cl ×Hl ×Wl ,
where Nl , Cl , Hl and Wl are respectively the number of filters, the number of channels in a filter, the
height of the filter, and the width of the filter, in the l -th convolutional layer. WOT adds constraints to
each 64-bit data block in the flattened weight vectors. Recall that, for in-place ECC to protect a 64-bit
data block, we need seven non-informative bits (i.e., seven small weights in the range [−64, 63]) to
store the seven check bits. To regularize the positions of large values in weights, the constraint on
the weights in the l -th convolutional layer can be given by Sl = {X | the first seven values in every
64-bit data block can have a value in only the range of [−64, 63]}.We next describe two potential solutions to the optimization problems.
86

6.3.1.1 ADMM-based Training
The above optimization problem can be formulated in the Alternating Direction Method of Multi-
pliers (ADMM) framework and solved in a way similar to an earlier work [Zha18c]. The optimization
problem (Eq. 6.2) is equivalent to:
min{W q
l }}f ({W q
l }Ll=1) +λ
L∑
l=1
‖W ql ‖
2F +
L∑
l=1
g l (Wq
l ), (6.4)
where g l (Wq
l ) =
0, if Wq
l ∈ Sl
+∞, otherwise.. Rewriting Eq. 6.4 in the ADMM framework leads to:
min{W q
l }f ({W q
l }Ll=1) +λ
L∑
l=1
‖W ql ‖
2F +
L∑
l=1
g l (Zl ), (6.5)
s .t . Wq
l = Zl , l = 1, · · · , L (6.6)
ADMM alternates between the optimization of model parameters ({W ql }
Ll=1 and the auxiliary
variables {Zl }Ll=1 by repeating the following three steps for k = 1, 2, · · · :
{W q ,k+1l }Ll=1 =arg min
{W ql }
Ll=1
f ({W ql }
Ll=1) +λ
L∑
l=1
‖W ql ‖
2F +γ
L∑
l=1
‖W ql −Zl +U k
l ‖2F , (6.7)
{Z k+1l }Ll=1 =arg min
{Zl }Ll=1
N∑
l=1
g l (Zl ) +L∑
l=1
λ
2‖W q ,k+1
l −Zl +U kl ‖
2F , (6.8)
U k+1l =U k
l +Wq ,k+1
l −Z k+1l . (6.9)
until the two conditions are met: ‖W q ,k+1l −Z k+1
l ‖2F ≤ ε and ‖Z k+1
l −Z kl ‖
2F ≤ ε.
Problem 6.7 can be solved using stochastic gradient descent (SGD) as the objective function is
differentiable. The optimal solution to the problem 6.8 is the projection of Wq ,k+1
l +U kl to set Sl . In
the implementation, we set a value in a 64-data block to 63 or -64 if the value is not in the eighth
position and is larger than 63 or smaller than -64.
Previous work has successfully applied the ADMM framework to CNN weight pruning [Zha18c]
and CNN weight quantization [Ren19] and shown remarkable compression results. But when it
is applied to our problem, experiments show that ADMM-based training cannot help reduce the
number of large values in the first seven positions of a 64-bit data block. Moreover, as the ADMM-
based training cannot guarantee that the constrain in Eq. 6.3 is satisfied, it is necessary to bound
the reamining large quantized values in the first 7 positions to 63 or -64 after the training, resulting
in large accuracy drops. Instead of ADMM-based training, WOT adopts an alternative approach
described below.
87

6.3.1.2 QAT with Throttling (QATT)
Our empirical explorations indicate that a simple quantization-aware training (QAT) procedure
combined with weight throttling can make the weights meet the constraint without jeopardising
the accuracy of a 8-bit quantized model. The training process iterates the following major steps for
each batch:
1. QAT: It involves forward-propagation using quantized parameters ({W ql }
Ll=1 and {b q
l }Ll=1) to
get the loss defined in Equation 6.2, back-propagation using quantized parameters, a update
step that applies float32 gradients to update float32 parameters ({Wl }Ll=1 and {bl }Ll=1), and a
quantization step that gets the new quantized parameters from their float32 version.
2. Throttling: It forces the quantized weights to meet the constraints defined in Eq. 6.3: If any
value in the first seven bytes of a 64-bit data block is larger than 63 (or less than -64), set the
value to 63 (or -64). The float32 versions are updated accordingly.
After the training, all of the values in the first seven positions of a 64-bit data block are ensured to
be within the range of [−64, 63], eliminating the need of storing large value positions for the in-place
ECC. It is worth noting that with WOT, all tested CNNs converge without noticeable accuracy loss
compared to the 8-bit quantized versions as Section 6.4 shows.
6.3.2 Full Design of In-Place Zero-Space ECC
In this part, we provide the full design of in-place zero-space ECC. For a given CNN, it first applies
WOT to regularize the CNN. After that, it conducts in-place error check encoding. The encoding uses
the same encoding algorithm as the standard error-correction encoding methods do; the difference
lies only in where the error check bits are placed.
There are various error-correction encoding algorithms. In principle, our proposed in-place
ECC could be generalized to various codes; we focus our implementation on SEC-DED codes for its
popularity in existing hardware-based memory protections for CNN.
Our in-place ECC features the same protection guarantees as the popular SEC-DED (72,64,1)
code but at zero-space cost. The in-place ECC uses the SEC-DED (64, 57, 1) code instead of (72, 64, 1)
to protect a 64-bit data block with the same protection strength. It distributes the seven error check
bits into the non-informative bits in the first seven weights.
As the ECC check bits are stored in-place, a minor extension to the existing ECC hardware is
required to support ECC decoding. As shown in Figure 6.2, the in-place ECC check bits and data
bits are swizzled to the right inputs to the standard ECC logic. The output of the ECC logic is then
used to recover the original weights: for each small weight (first seven bytes in a 8-byte data block),
simply copy the sign bit to its non-informative bit. As only additional wiring is needed to implement
this copy operation, no latency overhead is incurred to the standard ECC logic.
88

S W W W W W W
(Existing) ECC Logic with (64, 57) SEC-DED Hamming Code
P0
P0 P1…
…
… P6
S W W W W W WP6 S W W W W W WW
S W W W W WW S W W W W WW S W W W W W WW
7 check bits
8-weight (64-bit) block
57 data bits
S W W W W W WW … S W W W W W WW S W W W W W WW
8-weight (64-bit) block
Figure 6.2: Hardware design for in-place zero-space ECC protection.
6.4 Evaluations
We conducted a set of experiments to examine the efficacy of the proposed techniques in fault
protection and overhead. We first describe our experiment settings in Section 6.4.1 and then report
the effects of WOT and the proposed fault protection technique in Sections 6.4.2 and 6.4.3.
6.4.1 Experiment Settings
6.4.1.1 Models, Datasets, and Machines
The models we used in the fault injection experiments include VGG16 [Sim14], ResNet-18 [He16],
and SqueezeNet [Ian16b]. We choose these CNN models as representatives because: 1) VGG is a
typical CNN with stacked convolutional layers and widely used in transfer learning because of its
robustness. 2) ResNets are representatives of CNNs with modular structure (e.g. Residual Module)
and are widely used in advanced computer vision tasks such as object detection. 3) SqueezeNet
has much fewer parameters and represents CNNs that are designed for mobile applications. The
accuracies of these models are listed in Table 6.1. By default, We use the ImageNet dataset [Den09]
(ILSVRC 2012) for model training and evaluation. All the experiments are performed with PyTorch
1.0.1 on machines equipped with a 40-core 2.2GHz Intel Xeon Silver 4114 processor, 128GB of RAM,
and an NVIDIA TITAN Xp GPU with 12GB memory. Distiller [Zmo18] is used for 8-bit quantization.
The CUDA version is 10.1.
6.4.1.2 Counterparts for Comparisons
We compare our method (denoted as in-place) with the following three counterparts:
• No Protection (faulty): The CNN has no memory protection.
89

• Parity Zero (zero): It adds one parity bit to detect single bit errors in an eight-bit data block
(e.g. a single weight parameter). Once errors are detected, the weight is set to zero1.
• SEC-DED (ecc) It is the traditional SEC-DED [72,64,1] code-based protection in computer
systems [Sri15].
There are some previous proposals [Rea16; Azi18] of memory protections, which are however
designed for special CNN accelerators and provide without protection guarantees. The parity and
ECC represent the state of the art in the industry for memory protection that work generally across
processors and offer protection guarantees, hence the counterparts for our comparison.
6.4.2 WOT results
We evaluate the efficiency of WOT using the CNNs shown in Table 6.1. All the models are pre-trained
on ImageNet (downloaded from TorchVision2). We set λ to 0.0001 for all of the CNNs. Model training
uses stochastic gradient descent with a constant learning rate 0.0001 and momentum 0.9. Batch size
is 32 for VGG16_bn and ResNet-152, 64 for ResNet-50 and VGG16, and 128 for the remaining models.
Training stops as long as the model accuracy after weight throttling reaches its 8-bit quantized
version.
Figure 6.3 shows the changes of the total number of large values that are beyond [−64,63] in
the first seven positions of 8-byte blocks during the training on six of the CNNs. WOT successfully
reduces this number from more than 3,500–80,000 to near 0 for the models before throttling during
the training process. The remaining few large values in non-eighth positions are set to -64 or 63 at
the end of WOT. Note that VGG16_bn has around 10000 large values in the non eighth positions
after 8k iterations. Although more iterations further reduce this number, VGG16_bn can already
reach its original accuracy after weight throttling.
The accuracy curves of the models in the WOT training are shown in Figure 6.4. Overall, after
WOT training, the original accuracy of all the six networks are fully recovered. During the training,
the gap between the accuracy before throttling and after throttling is gradually reduced. For example,
the top-1 accuracy of SqueezeNet after 8-bit quantization is 57.01%. After the first iteration of WOT,
the accuracy before weight throttling is 31.38% and drops to 11.54% after throttling. WOT increases
the accuracy to 57.11% after 46k iterations with batch size 128 (around 4 epochs). All the other CNNs
are able to recover their original accuracy in only a few thousands of iterations. An exception is
VGG16, which reaches an accuracy of 71.50% (only 0.01% accuracy loss) after 20 epochs of training.
6.4.3 Fault injection results
In this set of experiments, we inject faults to CNN models and report the accuracy drops of CNN
models protected using different strategies. The fault model is random bit flip. Faults are injected to
1We have tried to set a detected faulty weight to the average of its neighbors but found it has worse performance thanParity Zero.
2https://pytorch.org/docs/master/torchvision/
90

Table 6.2: Accuracy drop of VGG16, ResNet-16, and SqueezeNet under different memory fault rates.
Model StrategyECC HW(Y/N)
SpaceOverhead (%)
Accuracy drop (%) under different fault rate1e-06 1e-05 1e-04 1e-03
VGG16
faulty N 0 0.31 ± 0.08 0.47 ± 0.09 1.35 ± 0.2 21.93 ± 5.7zero N 12.5 0.27 ± 0.05 0.36 ± 0.08 0.43 ± 0.13 1.04 ± 0.31ecc Y 12.5 0.0 ± 0.0 0.02 ± 0.02 0.35 ± 0.06 0.96 ± 0.14in-place Y 0 0.0 ± 0.0 0.02 ± 0.02 0.37 ± 0.07 0.93 ± 0.23
ResNet-18
faulty N 0 -0.09 ± 0.1 0.35 ± 0.23 4.35 ± 1.12 72.96 ± 1.48zero N 12.5 -0.06 ± 0.08 -0.08 ± 0.13 0.59 ± 0.3 4.35 ± 1.21ecc Y 12.5 0.0 ± 0.0 0.0 ± 0.01 -0.03 ± 0.08 2.8 ± 0.31in-place Y 0 0.0 ± 0.0 0.0 ± 0.01 -0.08 ± 0.09 2.96 ± 0.81
SqueezeNet
faulty N 0 0.12 ± 0.13 0.69 ± 0.31 9.39 ± 2.37 64.83 ± 0.5zero N 12.5 0.09 ± 0.12 0.11 ± 0.2 0.66 ± 0.29 8.16 ± 2.4ecc Y 12.5 0.0 ± 0.0 0.0 ± 0.0 0.12 ± 0.09 5.37 ± 0.66in-place Y 0 0.0 ± 0.0 0.0 ± 0.0 0.12 ± 0.09 5.19 ± 1.08
the weights of CNNs with memory fault rates varying from 10−9 to 0.001. The number of faulty bits
is the product of the number of bits used to represent weights of a CNN and the memory fault rate.
We repeated each fault injection experiment ten times.
Table 6.2 shows the mean accuracy drops with standard deviations under different memory fault
rates and the overheads introduced by the protection strategies for each model. Overall, the in-place
ECC protection and standard SEC-DED show similar accuracy drop patterns under various fault
rate settings as expected because they provide the same error correction capability, i.e., correcting a
single bit error and detecting double bit errors in a 64-bit data block. Both of the methods provide
stronger fault protection compared with the Parity Zero method. The space overhead is the ratio
between the extra number of bytes introduced by a protection strategy and the number of bytes
required to store weights. Parity Zero and SEC-DED encode 8-byte data with extra eight check bits
on average, making their space overhead 12.5%. In contrast, in-place ECC has zero space cost.
The fault injection experiments give the following insights on memory fault protection for CNNs.
First, larger models tend to suffer less from memory faults. For example, when fault rate is 0.0001
and no protection is applied, the accuracy drops of VGG16, ResNet-18, SqueezeNet (less than 2%,
8%, and 16% respectively) are increasing while the model size is decreasing (number of parameters
are 138M, 12M, and 1.2M respectively). Second, when the fault rate is small (e.g. less than 1e-05),
in-place ECC and standard SEC-DED can almost guarantee the same accuracy as the fault-free
model. Overall, the experiments confirm the potential of in-place zero-space ECC as an efficient
replacement of the standard ECC without compromising the protection quality.
6.5 Related Work
There are some early studies on fault tolerance of earlier neural networks (NN) [Pha95; Pro93; TH17];
they examined the performance degradation of NNs with various fault models on networks that
differ from modern CNNs in both network topologies and and model complexities.
Fault tolerance of deep neural networks (DNN) has recently drawn increasing attentions. Li et
al. [Li17] studied the soft error propagation in DNN accelerators and proposed to leverage symptom-
91

based error detectors for detecting errors and a hardware-based technique, selective latch hardening,
for detecting and correcting data-path faults. A recent work [Rea18; Are18] conducted some empirical
studies to quantify the fault tolerance of DNNs to memory faults and revealed that DNN fault
tolerance varies with respect to model, layer type, and structure. Zhang et al. [Zha18b] proposed
fault-aware pruning with retraining to mitigate the impact of permanent faults for systolic array-
based CNN accelerators (e.g., TPUs). They focused only on faults in the data-path and ignored
faults in the memory. Qin et al. [Qin17] studied the performance degradation of 16-bit quantized
CNNs under different bit flip rates and proposed to set values of detected erroneous weights as
zeros to mitigate the impact of faults. These prior works focused mainly on the characterization
of DNN’s fault tolerance with respect to various data types and network topologies. While several
software-based protection solutions were explored, they are preliminary. Some can only detect but
not correct errors (e.g. detecting extreme values [Li17]), others have limited protection capability
(e.g. setting faulty weights to zero [Qin17]).
Some prior work proposes designs of energy-efficient DNN accelerators by exploiting fault
tolerance of DNNs [Tem12; Kim18; Zha18a]. An accelerator design [Rea16] optimizes SRAM power
by reducing the supply voltage. It leverages active hardware fault detection coupled with bit masking
that shifts data towards zero to mitigate the impact of bit flips on DNNs’ model accuracy without
the need of re-training. Similar hardware faults detection techniques are later exploited in [Wha17;
Sal18; Zha18a; Hac19] to improve fault tolerance of DNNs. Azizimazreah et al. [Azi18] proposed
a novel memory cell designed to eliminate soft errors while achieving a low power consumption.
These designs are for some special accelerators rather than general DNN reliability protection. They
are still subject to various costs and offer no protection guarantees as existing ECC protections do.
This current work aims to reducing the space cost of protection to zero without compromising the
reliability of existing protections.
6.6 Future Directions
Besides 8-bit quantizations, there are proposals of even fewer-bit quantizations for CNN, in which,
there may be fewer non-informative bits in weight values. It is however worth noting that 8-bit
quantization is the de facto in most existing CNN frameworks; it has repeatedly shown in practice as
a robust choice that offers an excellent balance in model size and accuracy. Improving the reliability
of such models is hence essential. With that said, creating zero-space protections that works well
with other model quantizations is a direction worth future explorations.
A second direction worth exploring is to extend the in-place zero-space protection to other
error encoding methods (e.g., BCH [Cos83]). Some of them require more parity bits, for which, the
regularized training may need to be extended to create more free bits in data.
Finally, in-place zero-space ECC is in principle applicable to neural networks beyond CNN.
Empirically assessing the efficacy is left to future studies.
92

6.7 Conclusions
This chapter presented in-place zero-space ECC assisted with a new training scheme named WOT
to protect CNN memory. The protection scheme removes all space cost of ECC without compromis-
ing the reliability offered by ECC, opening new opportunities for enhancing the accuracy, energy
efficiency, reliability, and cost effectiveness of CNN-driven AI solutions.
93

0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0iterations(k)
05000
100001500020000250003000035000
coun
t
(a) AlexNet
0 1 2 3 4 5 6 7 8iterations(k)
1000020000300004000050000600007000080000
coun
t
(b) VGG16_bn
0.000.250.500.751.001.251.501.752.00iterations(k)
0
1000
2000
3000
4000
5000
coun
t
(c) ResNet-18
0 1 2 3 4 5 6 7 8iterations(k)
2000
4000
6000
8000
coun
t
(d) ResNet-34
0.0 2.5 5.0 7.5 10.012.515.017.520.0iterations(k)
0
2000
4000
6000
8000
10000
12000
coun
t
(e) ResNet-50
0 10 20 30 40iterations(k)
0500
100015002000250030003500
coun
t
(f) SqueezeNet
Figure 6.3: Changes of the total number of large values (beyond [−64, 63]) in the first 7 positions of8-byte (64-bit data) blocks before the throttling step during the WOT training process.
94

0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0iterations(k)
50515253545556
accu
racy
(%)
WOT: Before ThrottlingWOT: After ThrottlingOriginal Accuracy
(a) AlexNet
0 1 2 3 4 5 6 7 8iterations(k)
52.555.057.560.062.565.067.570.072.5
accu
racy
(%)
WOT: Before ThrottlingWOT: After ThrottlingOriginal Accuracy
(b) VGG16_bn
0.000.250.500.751.001.251.501.752.00iterations(k)
60
62
64
66
68
accu
racy
(%)
WOT: Before ThrottlingWOT: After ThrottlingOriginal Accuracy
(c) ResNet-18
0 1 2 3 4 5 6 7 8iterations(k)
64
66
68
70
72
accu
racy
(%)
WOT: Before ThrottlingWOT: After ThrottlingOriginal Accuracy
(d) ResNet-34
0.0 2.5 5.0 7.5 10.012.515.017.520.0iterations(k)
55
60
65
70
75
accu
racy
(%)
WOT: Before ThrottlingWOT: After ThrottlingOriginal Accuracy
(e) ResNet-50
0 10 20 30 40iterations(k)
10
20
30
40
50
accu
racy
(%)
WOT: Before ThrottlingWOT: After ThrottlingOriginal Accuracy
(f) SqueezeNet
Figure 6.4: Accuracy curves before and after the throttling step during the WOT training process.
95

CHAPTER
7
CONCLUSIONS AND FUTURE WORK
Technical advances in machine learning (ML) have changed ML from a bespoke solution for special
tasks to a practical technology that can be deployed almost everywhere. This thesis focuses on
resolving challenges in adopting ML in real-world applications running on various systems. It
demonstrates the benefits of reuse-centric optimization for (1) efficient model discovery via reuse-
centric k-mean configuration in Chapter 3, composability-based fast CNN pruning in Chapter 4,
and ensemble training with data sharing in Chapter 5, and (2) reliable model inference via in-place
zero-space memory protection for CNN in Chapter 6. All of these optimizations share the common
reuse principle and the semantic-changing optimization philosophy. A high-level summary of the
thesis and research scope is shown in Figure 7.1.
Efficient Model Discovery. We start with k-means clustering and demonstrate implementation-
level reuse opportunities can be leveraged to accelerate k-means algorithm configuration by up
to 9X in Chapter 3. We then focus on efficient CNN model discovery, which is notoriously slow
and one of the major hurdles for shortening the time to market AI products. Chapter 4 presents a
compiler-based framework that speeds up CNN pruning by up to 186X via algorithm-level reuse.
We empirically uncover the existence of composability in the training of a collection of pruned CNN
models, design a compression-based algorithm to identify reuse opportunities, and propose a new
training scheme called composability-based CNN pruning to get benefits from reuse. Chapter 5
studies resource allocation problems when training a heterogeneous set of DNNs and presents a
flexible ensemble training framework called FLEET that achieves up to 2X speedup in ensemble
training. The framework integrates data-parallel distributed training, checkpointing, sharing of
preprocessed data, and efficient DNNs-to-GPUs mapping to best exploit infrastructure-level reuse
opportunities.
96

Semantic-PreservingOptimization in traditional
optimizing compilers
Reuse-CentricOptimization
Semantic-ChangingProgram Optimization
New Paradigm
K-Means Configuration (Chap. 3)
CNN Pruning (Chap. 4)
Ensemble Training (Chap. 5)
Memory Faults (Chap. 6)
Model Discovery
… …
Model Inference
… …
Figure 7.1: Summary of the thesis.
Reliable Model Inference. As CNNs are increasingly adopted in safety-critical applications,
making CNN a reliable solution becomes a matter of urgency. Chapter 6 presents in-place zero-
space ECC assisted with a new training scheme weight distribution-oriented training to improve
reliability of CNN inference. The new method provides the first known zero space cost memory
protection for CNNs without compromising the reliability offered by traditional ECC.
Future Work. This thesis has shed some light on how reuse opportunities can be leveraged to
ensure the efficiency and reliability of ML via innovations in both algorithms and programming
systems. Many fundamental questions on reuse-centric optimization remain for future exploration.
An immediate direction is on generalizing the success in efficient CNN pruning to a much
broader range of ML models (e.g. Recurrent Neural Networks), other search strategies (e.g., re-
inforcement learning and evolutionary algorithms), and other search objectives (e.g., accuracy).
The recent progress on neural architecture search (NAS) has shown some promising results on
automated model discovery. NAS helps eliminate the tedious and error-prone manual design ef-
forts. However, due to the lack of understanding of fundamental properties in trading off accuracy
for performance, it requires large-scale search which is too costly for many users. To reduce the
search cost, it is necessary to develop more efficient model search and training algorithms and then
automate them via novel programming system designs.
A more fundamental direction is to answer the many open questions lying at the foundation
level of reuse-centric optimization. What is the full taxonomy of reuse opportunities? Is it possible
to automatically uncover the hidden reuse opportunities in an arbitrary ML algorithm? Is there a
principled way to create and leverage reuse opportunities? How can we characterize the tradeoffs
between reuse benefits and the myriad other objectives (accuracy, size, energy, security, reliability,
interpretability, etc.) of ML? Are reuse-centric optimizations composable? How can we make them
work synergistically and avoid conflicts? What are the connections with other optimizations (in
97

both software and hardware) of deep learning? Answers to these questions will build the theoreti-
cal foundation for reuse-centric optimizations for deep learning. They will also pave the way for
generalizing the optimization to problems even beyond ML.
The achievements in improving CNN reliability elucidate the importance of a comprehensive
characterization of ML systems. Just as the small-weight observation motivates our in-place zero-
cost protection strategy, a comprehensive characterization of ML systems could expose more opti-
mization opportunities for improving system reliability and achieving the ultimate goal of making
AI dependable. The characterization should consider all layers from domain-specific requirements
(How much reliability is required? Is the application accuracy-critical or performance-critical?),
the choice of ML models (How robust is the model to adversarial attacks or faults?), and the relia-
bility of software stacks (Is the kernel implementation bug-free?) and computing hardware (Does
the hardware exhibit a relatively high fault rate?). The potential optimizations can go beyond the
reuse-centric approaches and requires the software-hardware co-design.
These explorations are just the beginning of the journey to the development of a new optimiza-
tion paradigm called semantic-changing program optimization, shown in Figure 7.1. Programming
systems work has long followed the contract that the program to be compiled and the program to
be executed should be equivalent. In other words, we conduct semantic-preserving optimization
for our programs. Now, with the wide adoption of ML in real applications, ML has become part
of our program and software. It is seemingly that ML has opened an opportunity to develop the
new optimization paradigm, semantic-changing program optimization. In this new paradigm, we
change the semantics or intentions of our program by optimizing our algorithms or workflows
instead of just instructions to obtain larger performance gain. And reuse-centric optimization is
only the tip of an iceberg. The new paradigm grows out of the principles in optimizing compiler. It
is inspired by the influence of approximate computing. As this thesis has shown, the new paradigm
has many potentials. And there are many open questions to answer: Are there principled ways to
characterize the nature of applicable situations? What is the set of techniques to develop to best
leverage these opportunities? What are the connections to modern programming language designs?
How to go beyond ML? What are the relations to other aspects of software (e.g., reliability, security)?
98
BIBLIOGRAPHY
[Aba15] Abadi, M. et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems.Software available from tensorflow.org. 2015.
[Agh17] Aghasi, A. et al. “Net-Trim: Convex Pruning of Deep Neural Networks with PerformanceGuarantee”. Advances in Neural Information Processing Systems. 2017, pp. 3180–3189.
[Ang13] Anguita, D. et al. “A Public Domain Dataset for Human Activity Recognition usingSmartphones.” ESANN. 2013.
[Are18] Arechiga, A. P. & Michaels, A. J. “The Effect of Weight Errors on Neural Networks”. 2018IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC).IEEE. 2018.
[Art07] Arthur, D. & Vassilvitskii, S. “k-means++: The advantages of careful seeding”. Proceed-ings of the eighteenth annual ACM-SIAM symposium on Discrete algorithms. Societyfor Industrial and Applied Mathematics. 2007, pp. 1027–1035.
[Ash17] Ashok, A. et al. “N2N Learning: Network to Network Compression via Policy GradientReinforcement Learning”. arXiv preprint arXiv:1709.06030 (2017).
[Asu07] Asuncion, A. & Newman, D. UCI machine learning repository. 2007.
[Aug11] Augonnet, C. et al. “StarPU: a unified platform for task scheduling on heterogeneousmulticore architectures”. Concurrency and Computation: Practice and Experience 23.2(2011), pp. 187–198.
[Azi18] Azizimazreah, A. et al. “Tolerating Soft Errors in Deep Learning Accelerators with Reli-able On-Chip Memory Designs”. 2018 IEEE International Conference on Networking,Architecture and Storage (NAS). IEEE. 2018, pp. 1–10.
[Ba14] Ba, J. & Caruana, R. “Do deep nets really need to be deep?” Advances in neural informa-tion processing systems. 2014, pp. 2654–2662.
[Bal07] Balaprakash, P. et al. “Improvement strategies for the F-Race algorithm: Sampling designand iterative refinement”. International Workshop on Hybrid Metaheuristics. Springer.2007, pp. 108–122.
[Ber12] Bergstra, J. & Bengio, Y. “Random search for hyper-parameter optimization”. Journal ofMachine Learning Research 13.Feb (2012), pp. 281–305.
[Bir02] Birattari, M. et al. “A racing algorithm for configuring metaheuristics”. Proceedings of the4th Annual Conference on Genetic and Evolutionary Computation. Morgan KaufmannPublishers Inc. 2002, pp. 11–18.
[Bir10] Birattari, M. et al. “F-Race and iterated F-Race: An overview”. Experimental methods forthe analysis of optimization algorithms. Springer, 2010, pp. 311–336.
99

[Boj16] Bojarski, M. et al. “End to end learning for self-driving cars”. preprint arXiv:1604.07316(2016).
[Bot10] Bottou, L. “Large-scale machine learning with stochastic gradient descent”. Proceedingsof COMPSTAT’2010. Springer, 2010, pp. 177–186.
[Buc06] Bucilua, C. et al. “Model compression”. Proceedings of the 12th ACM SIGKDD inter-national conference on Knowledge discovery and data mining. ACM. 2006, pp. 535–541.
[Buc18] Buckler, M. et al. “EVA2: Exploiting Temporal Redundancy in Live Computer Vision”.arXiv preprint arXiv:1803.06312 (2018).
[Caf] Caffe Solver Prototxt.https://github.com/BVLC/caffe/wiki/Solver-Prototxt.
[Can16] Canziani, A. et al. “An analysis of deep neural network models for practical applications”.arXiv preprint arXiv:1605.07678 (2016).
[Che18a] Chen, H. et al. “The rise of deep learning in drug discovery”. Drug discovery today 23.6(2018), pp. 1241–1250.
[Che18b] Chen, T. et al. “{TVM}: An automated end-to-end optimizing compiler for deep learning”.13th {USENIX} Symposium on Operating Systems Design and Implementation ({OSDI}18). 2018, pp. 578–594.
[Che16] Cheng, D. et al. “Improving performance of heterogeneous mapreduce clusters withadaptive task tuning”. IEEE Transactions on Parallel and Distributed Systems 28.3 (2016),pp. 774–786.
[Chi14] Chilimbi, T. et al. “Project adam: Building an efficient and scalable deep learning trainingsystem”. 11th {USENIX} Symposium on Operating Systems Design and Implementation(OSDI). 2014, pp. 571–582.
[Chi01] Chilimbi, T. M. “Efficient representations and abstractions for quantifying and exploitingdata reference locality”. ACM SIGPLAN Notices. Vol. 36. 5. ACM. 2001, pp. 191–202.
[Chi02] Chilimbi, T. M. & Hirzel, M. “Dynamic hot data stream prefetching for general-purposeprograms”. ACM SIGPLAN Notices. Vol. 37. 5. ACM. 2002, pp. 199–209.
[Cho15] Chollet, F. et al. Keras. https://keras.io. 2015.
[Cho16] Chowdhury, M. et al. “{HUG}: Multi-Resource Fairness for Correlated and Elastic De-mands”. 13th {USENIX} Symposium on Networked Systems Design and Implementation({NSDI} 16). 2016, pp. 407–424.
[Coa12] Coates, A. & Ng, A. Y. “Learning feature representations with k-means”. Neural networks:Tricks of the trade. Springer, 2012, pp. 561–580.
[Cos83] Costello, D. J. Error Control Coding: Fundamentals and Applications. prentice Hall, 1983.
100

[Dav79] Davies, D. L. & Bouldin, D. W. “A cluster separation measure”. IEEE transactions onpattern analysis and machine intelligence 2 (1979), pp. 224–227.
[Dea12] Dean, J. et al. “Large scale distributed deep networks”. Advances in neural informationprocessing systems. 2012, pp. 1223–1231.
[Del14] Delimitrou, C. & Kozyrakis, C. “Quasar: resource-efficient and QoS-aware cluster man-agement”. ACM SIGARCH Computer Architecture News. Vol. 42. 1. ACM. 2014, pp. 127–144.
[Den09] Deng, J. et al. “Imagenet: A large-scale hierarchical image database”. 2009 IEEE confer-ence on computer vision and pattern recognition. Ieee. 2009, pp. 248–255.
[Dev18] Devlin, J. et al. “Bert: Pre-training of deep bidirectional transformers for language un-derstanding”. arXiv preprint arXiv:1810.04805 (2018).
[Din15a] Ding, Y. et al. “Top: A framework for enabling algorithmic optimizations for distance-related problems”. Proceedings of the VLDB Endowment 8.10 (2015), pp. 1046–1057.
[Din15b] Ding, Y. et al. “Yinyang k-means: A drop-in replacement of the classic k-means withconsistent speedup”. Proceedings of the 32nd International Conference on MachineLearning (ICML-15). 2015, pp. 579–587.
[Dra12] Drake, J. & Hamerly, G. “Accelerated k-means with adaptive distance bounds”. 5th NIPSworkshop on optimization for machine learning. 2012, pp. 42–53.
[Du89] Du, J. & Leung, J. Y.-T. “Complexity of scheduling parallel task systems”. SIAM Journalon Discrete Mathematics 2.4 (1989), pp. 473–487.
[Dun74] Dunn, J. C. “Well-separated clusters and optimal fuzzy partitions”. Journal of cybernetics4.1 (1974), pp. 95–104.
[Eck18] Eckert, C. et al. “Neural Cache: Bit-Serial In-Cache Acceleration of Deep Neural Net-works”. arXiv preprint arXiv:1805.03718 (2018).
[Elk03] Elkan, C. “Using the triangle inequality to accelerate k-means”. ICML. Vol. 3. 2003,pp. 147–153.
[Fei97] Feitelson, D. G. et al. “Theory and practice in parallel job scheduling”. Workshop on JobScheduling Strategies for Parallel Processing. Springer. 1997, pp. 1–34.
[Fig17] Figurnov, M. et al. “Spatially adaptive computation time for residual networks”. arXivpreprint (2017).
[Fow18] Fowers, J. et al. A Configurable Cloud-Scale DNN Processor for Real-Time AI. IEEE, 2018.
[Fri01] Friedman, J. et al. The elements of statistical learning. Vol. 1. Springer series in statisticsSpringer, Berlin, 2001.
101

[Fu17] Fu, J. et al. “Look closer to see better: Recurrent attention convolutional neural networkfor fine-grained image recognition”. Conf. on Computer Vision and Pattern Recognition.2017.
[Gar18] Garipov, T. et al. “Loss surfaces, mode connectivity, and fast ensembling of dnns”. Ad-vances in Neural Information Processing Systems. 2018, pp. 8789–8798.
[Gor18] Gordon, A. et al. “Morphnet: Fast & simple resource-constrained structure learning ofdeep networks”. IEEE Conference on Computer Vision and Pattern Recognition (CVPR).2018.
[Gra15] Grandl, R. et al. “Multi-resource packing for cluster schedulers”. ACM SIGCOMM Com-puter Communication Review 44.4 (2015), pp. 455–466.
[Gu19] Gu, J. et al. “Tiresias: A {GPU} cluster manager for distributed deep learning”. 16th{USENIX} Symposium on Networked Systems Design and Implementation ({NSDI} 19).2019, pp. 485–500.
[Hac19] Hacene, G. B. et al. “Training Modern Deep Neural Networks for Memory-Fault Robust-ness” (2019).
[Ham10] Hamerly, G. “Making k-means even faster”. Proceedings of the 2010 SIAM internationalconference on data mining. SIAM. 2010, pp. 130–140.
[Han15a] Han, S. et al. “Deep compression: Compressing deep neural networks with pruning,trained quantization and huffman coding”. arXiv preprint arXiv:1510.00149 (2015).
[Han15b] Han, S. et al. “Learning both weights and connections for efficient neural network”.Advances in neural information processing systems. 2015, pp. 1135–1143.
[Har18] Harlap, A. et al. “Pipedream: Fast and efficient pipeline parallel dnn training”. arXivpreprint arXiv:1806.03377 (2018).
[He15] He, K. et al. “Delving deep into rectifiers: Surpassing human-level performance onimagenet classification”. Proceedings of the IEEE international conference on computervision. 2015, pp. 1026–1034.
[He16] He, K. et al. “Deep residual learning for image recognition”. Proceedings of the IEEEconference on computer vision and pattern recognition. 2016, pp. 770–778.
[He18] He, Y. & Han, S. “ADC: Automated Deep Compression and Acceleration with Reinforce-ment Learning”. arXiv preprint arXiv:1802.03494 (2018).
[He17] He, Y. et al. “Channel pruning for accelerating very deep neural networks”. InternationalConference on Computer Vision (ICCV). Vol. 2. 2017, p. 6.
[Hin15] Hinton, G. et al. “Distilling the knowledge in a neural network”. preprint arXiv:1503.02531(2015).
102

[Hoc95] Hochbaum, D. S. Approximation Algorithms for NP-Hard Problems. PWS PublishingCompany, 1995.
[Hol12] Holger H. Hoos. Automated Algorithm Configuration and Parameter Tuning. Vol. 3.(Edited by Y. Hamadi, E. Monfroy, and F. Saubion) Springer Berlin Heidelberg, 2012.
[Hoo11] Hoos, H. H. “Automated algorithm configuration and parameter tuning”. Autonomoussearch. Springer, 2011, pp. 37–71.
[Hoo04] Hoos, H. H. & Stützle, T. Stochastic local search: Foundations and applications. Elsevier,2004.
[How17] Howard, A. G. et al. “Mobilenets: Efficient convolutional neural networks for mobilevision applications”. arXiv preprint arXiv:1704.04861 (2017).
[Hu16] Hu, H. et al. “Network trimming: A data-driven neuron pruning approach towardsefficient deep architectures”. arXiv preprint arXiv:1607.03250 (2016).
[Hua17] Huang, G. et al. “Densely connected convolutional networks”. Proceedings of the IEEEconference on computer vision and pattern recognition. 2017, pp. 4700–4708.
[Hua18] Huang, Y. et al. “Gpipe: Efficient training of giant neural networks using pipeline paral-lelism”. arXiv preprint arXiv:1811.06965 (2018).
[Hue16] Huerta, R. et al. “Online decorrelation of humidity and temperature in chemical sensorsfor continuous monitoring”. Chemometrics and Intelligent Laboratory Systems 157(2016), pp. 169–176.
[Hut07] Hutter, F. et al. “Automatic algorithm configuration based on local search”. AAAI. Vol. 7.2007, pp. 1152–1157.
[Hut09] Hutter, F. et al. “An experimental investigation of model-based parameter optimisa-tion: SPO and beyond”. Proceedings of the 11th Annual conference on Genetic andevolutionary computation. ACM. 2009, pp. 271–278.
[Hut11] Hutter, F. et al. “Sequential model-based optimization for general algorithm configu-ration”. International Conference on Learning and Intelligent Optimization. Springer.2011, pp. 507–523.
[Ian16a] Iandola, F. N. et al. “Firecaffe: near-linear acceleration of deep neural network trainingon compute clusters”. Proceedings of the IEEE Conference on Computer Vision andPattern Recognition. 2016, pp. 2592–2600.
[Ian16b] Iandola, F. N. et al. “SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and<0.5 MB model size”. arXiv preprint arXiv:1602.07360 (2016).
[Mkl] Intel(R) Math Kernel Library for Deep Neural Networks (Intel(R) MKL-DNN). https://intel.github.io/mkl-dnn/. Accessed: 2019-08-16.
103

[Iof15] Ioffe, S. & Szegedy, C. “Batch normalization: Accelerating deep network training byreducing internal covariate shift”. International conference on machine learning. 2015,pp. 448–456.
[Jac17] Jacob, B. et al. gemmlowp: a small self-contained low-precision GEMM library. 2017.
[Jac18] Jacob, B. et al. “Quantization and training of neural networks for efficient integer-arithmetic-only inference”. Proceedings of the IEEE Conference on Computer Visionand Pattern Recognition. 2018, pp. 2704–2713.
[Jia14] Jia, Y. et al. “Caffe: Convolutional Architecture for Fast Feature Embedding”. arXivpreprint arXiv:1408.5093 (2014).
[Kal12] Kalogeratos, A. & Likas, A. “Dip-means: an incremental clustering method for estimatingthe number of clusters”. Advances in neural information processing systems. 2012,pp. 2393–2401.
[Kan18] Kandasamy, K. et al. “Neural architecture search with bayesian optimisation and optimaltransport”. Advances in Neural Information Processing Systems. 2018, pp. 2016–2025.
[Kho11] Khosla, A. et al. “Novel dataset for fine-grained image categorization: Stanford dogs”.Proc. CVPR Workshop on Fine-Grained Visual Categorization (FGVC). Vol. 2. 2011, p. 1.
[Kim18] Kim, S. et al. “Energy-efficient neural network acceleration in the presence of bit-levelmemory errors”. IEEE Transactions on Circuits and Systems I: Regular Papers 99 (2018),pp. 1–14.
[Kim14] Kim, Y. “Convolutional neural networks for sentence classification”. arXiv preprintarXiv:1408.5882 (2014).
[Kra13] Krause, J. et al. “3d object representations for fine-grained categorization”. ComputerVision Workshops (ICCVW), 2013 IEEE International Conference on. IEEE. 2013, pp. 554–561.
[Kra16] Krause, J. et al. “The unreasonable effectiveness of noisy data for fine-grained recogni-tion”. European Conference on Computer Vision. Springer. 2016, pp. 301–320.
[Kri12] Krizhevsky, A. et al. “Imagenet classification with deep convolutional neural networks”.Advances in neural information processing systems. 2012, pp. 1097–1105.
[Kum94] Kumar, V. et al. “Scalable load balancing techniques for parallel computers”. Journal ofParallel and Distributed computing 22.1 (1994), pp. 60–79.
[Lar99] Larus, J. R. “Whole program paths”. ACM SIGPLAN Notices. Vol. 34. 5. ACM. 1999, pp. 259–269.
[Lau05] Lau, J. et al. “Motivation for variable length intervals and hierarchical phase behavior”.IEEE International Symposium on Performance Analysis of Systems and Software, 2005.ISPASS 2005. IEEE. 2005, pp. 135–146.
104

[Law03] Law, J. & Rothermel, G. “Whole program path-based dynamic impact analysis”. SoftwareEngineering, 2003. Proceedings. 25th International Conference on. IEEE. 2003, pp. 308–318.
[Law97] Lawrence, S. et al. “Face recognition: A convolutional neural-network approach”. IEEEtransactions on neural networks 8.1 (1997), pp. 98–113.
[LeC95] LeCun, Y. & Bengio, Y. “Convolutional networks for images, speech, and time series”.The handbook of brain theory and neural networks 3361.10 (1995), p. 1995.
[LeC90] LeCun, Y. et al. “Optimal brain damage”. Advances in neural information processingsystems. 1990, pp. 598–605.
[Li17] Li, G. et al. “Understanding error propagation in deep learning neural network (DNN)accelerators and applications”. Proceedings of the International Conference for HighPerformance Computing, Networking, Storage and Analysis. ACM. 2017, p. 8.
[Li16] Li, H. et al. “Pruning filters for efficient convnets”. arXiv preprint arXiv:1608.08710 (2016).
[Li19] Li, L. & Talwalkar, A. “Random search and reproducibility for neural architecture search”.arXiv preprint arXiv:1902.07638 (2019).
[Lin17] Lin, J. et al. “Runtime Neural Pruning”. Advances in Neural Information ProcessingSystems. 2017, pp. 2178–2188.
[Liu17a] Liu, J. et al. “Sparse Deep Transfer Learning for Convolutional Neural Network.” AAAI.2017, pp. 2245–2251.
[Liu17b] Liu, Z. et al. “Learning efficient convolutional networks through network slimming”.2017 IEEE International Conference on Computer Vision (ICCV). IEEE. 2017, pp. 2755–2763.
[LI10] López-Ibánez, M. et al. “Exploratory analysis of stochastic local search algorithms inbiobjective optimization”. Experimental methods for the analysis of optimization algo-rithms. Springer, 2010, pp. 209–222.
[Los16] Loshchilov, I. & Hutter, F. “Sgdr: Stochastic gradient descent with warm restarts”. arXivpreprint arXiv:1608.03983 (2016).
[Lu12] Lu, W. et al. “Efficient processing of k nearest neighbor joins using mapreduce”. Pro-ceedings of the VLDB Endowment 5.10 (2012), pp. 1016–1027.
[Luo17a] Luo, J.-H. et al. “ThiNet: A Filter Level Pruning Method for Deep Neural Network Com-pression”. arXiv preprint arXiv:1707.06342 (2017).
[Luo18] Luo, L. et al. “Parameter Hub: High Performance Parameter Servers for Efficient Dis-tributed Deep Neural Network Training”. arXiv preprint arXiv:1801.09805 (2018).
[Luo17b] Luo, T. et al. “Dadiannao: A neural network supercomputer”. IEEE Transactions onComputers 66.1 (2017), pp. 73–88.
105

[Lyo62] Lyons, R. E. & Vanderkulk, W. “The use of triple-modular redundancy to improve com-puter reliability”. IBM journal of research and development 6.2 (1962), pp. 200–209.
[Mat18] Mathuriya, A. et al. “CosmoFlow: using deep learning to learn the universe at scale”.SC18: International Conference for High Performance Computing, Networking, Storageand Analysis. IEEE. 2018, pp. 819–829.
[McG17] McGill, M. & Perona, P. “Deciding how to decide: Dynamic routing in artificial neuralnetworks”. arXiv preprint arXiv:1703.06217 (2017).
[Mig17] Migacz, S. “8-bit inference with tensorrt”. GPU technology conference. Vol. 2. 2017, p. 7.
[Mio18] Miotto, R. et al. “Deep learning for healthcare: review, opportunities and challenges”.Briefings in bioinformatics 19.6 (2018), pp. 1236–1246.
[Mol16] Molchanov, P. et al. “Pruning convolutional neural networks for resource efficient transferlearning”. arXiv preprint arXiv:1611.06440 (2016).
[Mos18] Moshovos, A. et al. “Value-Based Deep-Learning Acceleration”. IEEE Micro 38.1 (2018),pp. 41–55.
[Nar18] Narayanan, D. et al. “Accelerating deep learning workloads through efficient multi-model execution”. NIPS Workshop on Systems for Machine Learning (December 2018).2018.
[NM97] Nevill-Manning, C. G. & Witten, I. H. “Identifying hierarchical structure in sequences: Alinear-time algorithm”. J. Artif. Intell. Res.(JAIR) 7 (1997), pp. 67–82.
[Nil08] Nilsback, M.-E. & Zisserman, A. “Automated flower classification over a large number ofclasses”. Computer Vision, Graphics & Image Processing, 2008. ICVGIP’08. Sixth IndianConference on. IEEE. 2008, pp. 722–729.
[O’K18] O’Keeffe, S. & Villing, R. “Evaluating pruned object detection networks for real-timerobot vision”. Autonomous Robot Systems and Competitions (ICARSC), 2018 IEEEInternational Conference on. IEEE. 2018, pp. 91–96.
[Ous13] Ousterhout, K. et al. “Sparrow: distributed, low latency scheduling”. Proceedings of theTwenty-Fourth ACM Symposium on Operating Systems Principles. ACM. 2013, pp. 69–84.
[Ovt15] Ovtcharov, K. et al. “Accelerating deep convolutional neural networks using specializedhardware”. Microsoft Research Whitepaper 2.11 (2015).
[Pan10] Pan, S. J. & Yang, Q. “A survey on transfer learning”. IEEE Transactions on knowledgeand data engineering 22.10 (2010), pp. 1345–1359.
[Par18] Park, J. et al. “Deep learning inference in facebook data centers: Characterization, per-formance optimizations and hardware implications”. arXiv preprint arXiv:1811.09886(2018).
106

[Pas19] Paszke, A. et al. “PyTorch: An Imperative Style, High-Performance Deep Learning Li-brary”. Advances in Neural Information Processing Systems 32. Ed. by Wallach, H. et al.Curran Associates, Inc., 2019, pp. 8024–8035.
[Pat18] Patton, R. M. et al. “167-PFlops deep learning for electron microscopy: from learningphysics to atomic manipulation”. Proceedings of the International Conference for HighPerformance Computing, Networking, Storage, and Analysis. IEEE Press. 2018, p. 50.
[Pha95] Phatak, D. S. & Koren, I. “Complete and partial fault tolerance of feedforward neuralnets”. IEEE Transactions on Neural Networks 6.2 (1995), pp. 446–456.
[Pit18] Pittman, R. et al. “Exploring flexible communications for streamlining DNN ensembletraining pipelines”. SC18: International Conference for High Performance Computing,Networking, Storage and Analysis. IEEE. 2018, pp. 807–818.
[Pro93] Protzel, P. W. et al. “Performance and fault-tolerance of neural networks for optimization”.IEEE transactions on Neural Networks 4.4 (1993), pp. 600–614.
[Qin17] Qin, M. et al. “Robustness of neural networks against storage media errors”. arXivpreprint arXiv:1709.06173 (2017).
[Qnn] QNNPACK: Open source library for optimized mobile deep learning. https://code.fb.com/ml-applications/qnnpack/. Accessed: 2019-08-16.
[Rah17] Rahman, A. et al. “Programming challenges of chatbot: Current and future prospective”.2017 IEEE Region 10 Humanitarian Technology Conference (R10-HTC). IEEE. 2017,pp. 75–78.
[Rat12] Ratnaparkhi, A. A. & Pilli, E. “Networks”. 2016 International Conference on EmergingTrends in Communication Technologies (ETCT) (2012), pp. 1–6.
[Rea16] Reagen, B. et al. “Minerva: Enabling low-power, highly-accurate deep neural networkaccelerators”. 2016 ACM/IEEE 43rd Annual International Symposium on ComputerArchitecture (ISCA). IEEE. 2016, pp. 267–278.
[Rea18] Reagen, B. et al. “Ares: A framework for quantifying the resilience of deep neural net-works”. 2018 55th ACM/ESDA/IEEE Design Automation Conference (DAC). IEEE. 2018,pp. 1–6.
[Ren19] Ren, A. et al. “ADMM-NN: An Algorithm-Hardware Co-Design Framework of DNNsUsing Alternating Direction Methods of Multipliers”. Proceedings of the Twenty-FourthInternational Conference on Architectural Support for Programming Languages andOperating Systems. ACM. 2019, pp. 925–938.
[Ren15] Ren, S. et al. “Faster r-cnn: Towards real-time object detection with region proposalnetworks”. Advances in neural information processing systems. 2015, pp. 91–99.
[Rou87] Rousseeuw, P. J. “Silhouettes: a graphical aid to the interpretation and validation ofcluster analysis”. Journal of computational and applied mathematics 20 (1987), pp. 53–65.
107

[Rus15] Russakovsky, O. et al. “Imagenet large scale visual recognition challenge”. InternationalJournal of Computer Vision (IJCV) 115.3 (2015), pp. 211–252.
[SG16] S. Guadarrama, N. S. TensorFlow-Slim: a lightweight library for defining, training andevaluating complex models in TensorFlow. https://github.com/tensorflow/tensorflow/tree/master/tensorflow/contrib/slim. 2016.
[Sal18] Salami, B. et al. “On the Resilience of RTL NN Accelerators: Fault Characterization andMitigation”. 2018 30th International Symposium on Computer Architecture and HighPerformance Computing (SBAC-PAD). IEEE. 2018, pp. 322–329.
[Sal17] Salimans, T. et al. “Evolution strategies as a scalable alternative to reinforcement learn-ing”. arXiv preprint arXiv:1703.03864 (2017).
[Sat11] Satopaa, V. et al. “Finding a" kneedle" in a haystack: Detecting knee points in system be-havior”. Distributed Computing Systems Workshops (ICDCSW), 2011 31st InternationalConference on. IEEE. 2011, pp. 166–171.
[Sei16] Seide, F. & Agarwal, A. “CNTK: Microsoft’s open-source deep-learning toolkit”. Proceed-ings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery andData Mining. 2016, pp. 2135–2135.
[Ser18] Sergeev, A. & Del Balso, M. “Horovod: fast and easy distributed deep learning in Tensor-Flow”. arXiv preprint arXiv:1802.05799 (2018).
[Sha18] Sharma, H. et al. “Bit Fusion: Bit-Level Dynamically Composable Architecture for Accel-erating Deep Neural Network”. 2018 ACM/IEEE 45th Annual International Symposiumon Computer Architecture (ISCA). IEEE. 2018.
[Shm95] Shmoys, D. B. et al. “Scheduling Parallel Machines On-line”. SIAM J. Comput. 24.6 (1995),pp. 1313–1331.
[Sil16] Silberman, N. & Guadarrama, S. TensorFlow-Slim image classification model library.https://github.com/tensorflow/models/tree/master/research/slim.2016.
[Sil17] Silver, D. et al. “Mastering the game of go without human knowledge”. Nature 550.7676(2017), pp. 354–359.
[Sim14] Simonyan, K. & Zisserman, A. “Very deep convolutional networks for large-scale imagerecognition”. arXiv preprint arXiv:1409.1556 (2014).
[Sno12] Snoek, J. et al. “Practical bayesian optimization of machine learning algorithms”. Ad-vances in neural information processing systems. 2012, pp. 2951–2959.
[Sri15] Sridharan, V. et al. “Memory errors in modern systems: The good, the bad, and the ugly”.ACM SIGPLAN Notices 50.4 (2015), pp. 297–310.
108

[Sum] Summit User Guide Oak Ridge Leadership Computing Facility. https://www.olcf.ornl.gov/for-users/system-user-guides/summitdev-quickstart-guide/.Accessed 3/3/2019. 2019.
[Sze17] Sze, V. et al. “Efficient processing of deep neural networks: A tutorial and survey”. Pro-ceedings of the IEEE 105.12 (2017), pp. 2295–2329.
[Sze15] Szegedy, C. et al. “Going deeper with convolutions”. Proceedings of the IEEE conferenceon computer vision and pattern recognition. 2015, pp. 1–9.
[Sze16] Szegedy, C. et al. “Rethinking the inception architecture for computer vision”. Pro-ceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2016,pp. 2818–2826.
[Tem12] Temam, O. “A defect-tolerant accelerator for emerging high-performance applications”.ACM SIGARCH Computer Architecture News. Vol. 40. 3. IEEE Computer Society. 2012,pp. 356–367.
[Tia17] Tian, Q. et al. “Deep lda-pruned nets for efficient facial gender classification”. ComputerVision and Pattern Recognition Workshops (CVPRW), 2017 IEEE Conference on. IEEE.2017, pp. 512–521.
[Tom14] Tompson, J. J. et al. “Joint training of a convolutional network and a graphical modelfor human pose estimation”. Advances in neural information processing systems. 2014,pp. 1799–1807.
[TH17] Torres-Huitzil, C. & Girau, B. “Fault and error tolerance in neural networks: A review”.IEEE Access 5 (2017), pp. 17322–17341.
[Tur92] Turek, J. et al. “Scheduling parallelizable tasks: Putting it all on the shelf”. ACM SIGMET-RICS Performance Evaluation Review. Vol. 20. 1. ACM. 1992, pp. 225–236.
[Urg02] Urgaonkar, B. et al. “Resource overbooking and application profiling in shared hostingplatforms”. ACM SIGOPS Operating Systems Review 36.SI (2002), pp. 239–254.
[Wal10] Walkinshaw, N. et al. “Using compression algorithms to support the comprehensionof program traces”. Proceedings of the Eighth International Workshop on DynamicAnalysis. ACM. 2010, pp. 8–13.
[Wan11] Wang, X. “A fast exact k-nearest neighbors algorithm for high dimensional search us-ing k-means clustering and triangle inequality”. Neural Networks (IJCNN), The 2011International Joint Conference on. IEEE. 2011, pp. 1293–1299.
[Wel10] Welinder, P. et al. “Caltech-UCSD birds 200” (2010).
[Wen16] Wen, W. et al. “Learning structured sparsity in deep neural networks”. Advances inNeural Information Processing Systems. 2016, pp. 2074–2082.
109

[Wha17] Whatmough, P. N. et al. “14.3 A 28nm SoC with a 1.2 GHz 568nJ/prediction sparse deep-neural-network engine with> 0.1 timing error rate tolerance for IoT applications”. 2017IEEE International Solid-State Circuits Conference (ISSCC). IEEE. 2017, pp. 242–243.
[Wu08] Wu, X. et al. “Top 10 algorithms in data mining”. Knowledge and information systems14.1 (2008), pp. 1–37.
[Xia18] Xiao, W. et al. “Gandiva: Introspective cluster scheduling for deep learning”. 13th USENIXSymposium on Operating Systems Design and Implementation (OSDI 18). 2018, pp. 595–610.
[Xu18] Xu, L. et al. “A heterogeneity-aware task scheduler for spark”. 2018 IEEE InternationalConference on Cluster Computing (CLUSTER). IEEE. 2018, pp. 245–256.
[Yan17] Yang, T.-J. et al. “Designing energy-efficient convolutional neural networks using energy-aware pruning”. IEEE Conference on Computer Vision and Pattern Recognition (CVPR).2017.
[Ye18] Ye, J. et al. “Rethinking the Smaller-Norm-Less-Informative Assumption in ChannelPruning of Convolution Layers”. arXiv preprint arXiv:1802.00124 (2018).
[Yeh09] Yeh, I.-C. & Lien, C.-h. “The comparisons of data mining techniques for the predictiveaccuracy of probability of default of credit card clients”. Expert Systems with Applications36.2 (2009), pp. 2473–2480.
[Yu10] Yu, F.-X. et al. “Overview of Radiation Hardening Techniques for IC Design”. InformationTechnology Journal 9.6 (2010), pp. 1068–1080.
[Yu17] Yu, J. et al. “Scalpel: Customizing dnn pruning to the underlying hardware parallelism”.ACM SIGARCH Computer Architecture News. Vol. 45. 2. ACM. 2017, pp. 548–560.
[Zag16] Zagoruyko, S. & Komodakis, N. “Wide residual networks”. arXiv preprint arXiv:1605.07146(2016).
[Zah08] Zaharia, M. et al. “Improving MapReduce performance in heterogeneous environments.”Osdi. Vol. 8. 4. 2008, p. 7.
[Zha18a] Zhang, J. et al. “Thundervolt: enabling aggressive voltage underscaling and timing er-ror resilience for energy efficient deep learning accelerators”. Proceedings of the 55thAnnual Design Automation Conference. ACM. 2018, p. 19.
[Zha18b] Zhang, J. J. et al. “Analyzing and mitigating the impact of permanent faults on a systolicarray based neural network accelerator”. 2018 IEEE 36th VLSI Test Symposium (VTS).IEEE. 2018, pp. 1–6.
[Zha18c] Zhang, T. et al. “A systematic dnn weight pruning framework using alternating directionmethod of multipliers”. Proceedings of the European Conference on Computer Vision(ECCV). 2018, pp. 184–199.
110

[Zha18d] Zhang, T. et al. “Adam-admm: A unified, systematic framework of structured weightpruning for dnns”. arXiv preprint arXiv:1807.11091 (2018).
[Zha17] Zhao, B. et al. “Diversified visual attention networks for fine-grained object classifica-tion”. IEEE Transactions on Multimedia 19.6 (2017), pp. 1245–1256.
[Zha08] Zhao, Q. et al. “Knee point detection in BIC for detecting the number of clusters”. In-ternational Conference on Advanced Concepts for Intelligent Vision Systems. Springer.2008, pp. 664–673.
[Zho17] Zhong, R. Y. et al. “Intelligent manufacturing in the context of industry 4.0: a review”.Engineering 3.5 (2017), pp. 616–630.
[Zhu18] Zhu, H. et al. “TBD: Benchmarking and Analyzing Deep Neural Network Training”. arXivpreprint arXiv:1803.06905 (2018).
[Zmo18] Zmora, N. et al. Neural Network Distiller. https://doi.org/10.5281/zenodo.1297430. 2018.
[Zop16] Zoph, B. & Le, Q. V. “Neural architecture search with reinforcement learning”. arXivpreprint arXiv:1611.01578 (2016).
[Zop18] Zoph, B. et al. “Learning transferable architectures for scalable image recognition”.Proceedings of the IEEE conference on computer vision and pattern recognition. 2018,pp. 8697–8710.
111