resumen dinámica estructural - césar pérez (13259)
DESCRIPTION
dfsTRANSCRIPT

UNIVERSIDAD DEL VALLE DE GUATEMALA
Facultad de Ingeniería
Resumen – Dinámica Estructural
Trabajo presentado por:
César Pérez - 13259
Análisis Estructural II
Guatemala 2015

Sistemas de 1 Grado de Libertad: Las vibraciones son libres cuando no existen fuerzas o acciones exteriores directamente aplicadas al sistema a lo largo del tiempo. Las vibraciones son forzadas cuando existen acciones o excitaciones directamente aplicadas al sistema a lo largo del tiempo, además de las fuerzas o momentos internos. Tanto las vibraciones libres como las forzadas pueden subdividirse, dependiendo de la existencia o no de fuerzas resistentes que amortiguan el movimiento vibratorio, en: �
Sin amortiguamiento: No existe resistencia pasiva al movimiento del sistema. �
Con amortiguamiento: Existen resistencias pasivas al movimiento del sistema, es decir, fuerzas o momentos disipativos que amortiguan el movimiento vibracional.
Vibración Sin Amortiguamiento:
La ecuación diferencial del movimiento es m´´+kx=0 en donde su solución es donde la solución general es donde la amplitud y la fase son constantes que se pueden determinar con condiciones iniciales. La frecuencia natural de vibración y el período son: En este tipo de vibraciones se cumple el principio de la conservación de la energía mecánica, es decir, la suma de la energía cinética y el potencial elástico es constante e igual a la energía total comunicada inicialmente al sistema, por lo que se verifica la ecuación: Donde el factor de amortiguamiento se define como:
Vibraciones Con Amortiguamiento: En todos los movimientos oscilantes reales, se disipa energía mecánica debido a algún tipo de fricción o rozamiento, de forma que dejado libremente a sí mismo, un muelle o péndulo finalmente deja de oscilar. Este movimiento se denomina amortiguado y se caracteriza porque tanto la amplitud como la energía mecánica disminuyen con el tiempo.

Vibración Subamortiguada: Corresponde al caso real en donde las estructuras verdaderamente vibran con 0<ξ<1 donde las raíces son:
Esta solución es aproximadamente armónica, es decir, existe una cierta periodicidad en el movimiento con intervalos temporales medidos por el pseudoperiodo T ' , que se puede expresar en función del periodo T correspondiente a la vibración no amortiguada a través de la relación. En las vibraciones amortiguadas, por ser un movimiento aperiódico no se cumple el principio de conservación de la energía mecánica, pero si el de la energía total, de forma que la suma de la energía cinética, el potencial elástico y la energía disipada en forma de calor, debido a la existencia de amortiguamiento, se mantiene constante,
los dos primeros términos disminuyen con el tiempo y la energía disipada tiende a alcanzar el valor máximo, es decir, existe transformación de energía mecánica en calorífica. Donde la solución es:

Vibración Amortiguada: El amortiguamiento crítico tiene una importancia especial porque separa los movimientos aperiódicos (no oscilatorios) de los oscilatorios amortiguados. Es decir, el valor crítico es la menor cantidad de amortiguamiento para que el sistema no oscile. En muchas aplicaciones prácticas se utiliza un amortiguamiento crítico, o próximo al crítico, para evitar vibraciones y conseguir que el sistema alcance el equilibrio rápidamente.
Vibración Sobreamortiguada: El sistema no oscila, simplemente vuelve a la posición de equilibrio, cuanto mayor es el amortiguamiento, más tiempo tarda el sistema en alcanzar la posición de equilibrio. Corresponde al caso en el que ξ es mayor que la unidad donde la respuesta que depende del tiempo es igual a:
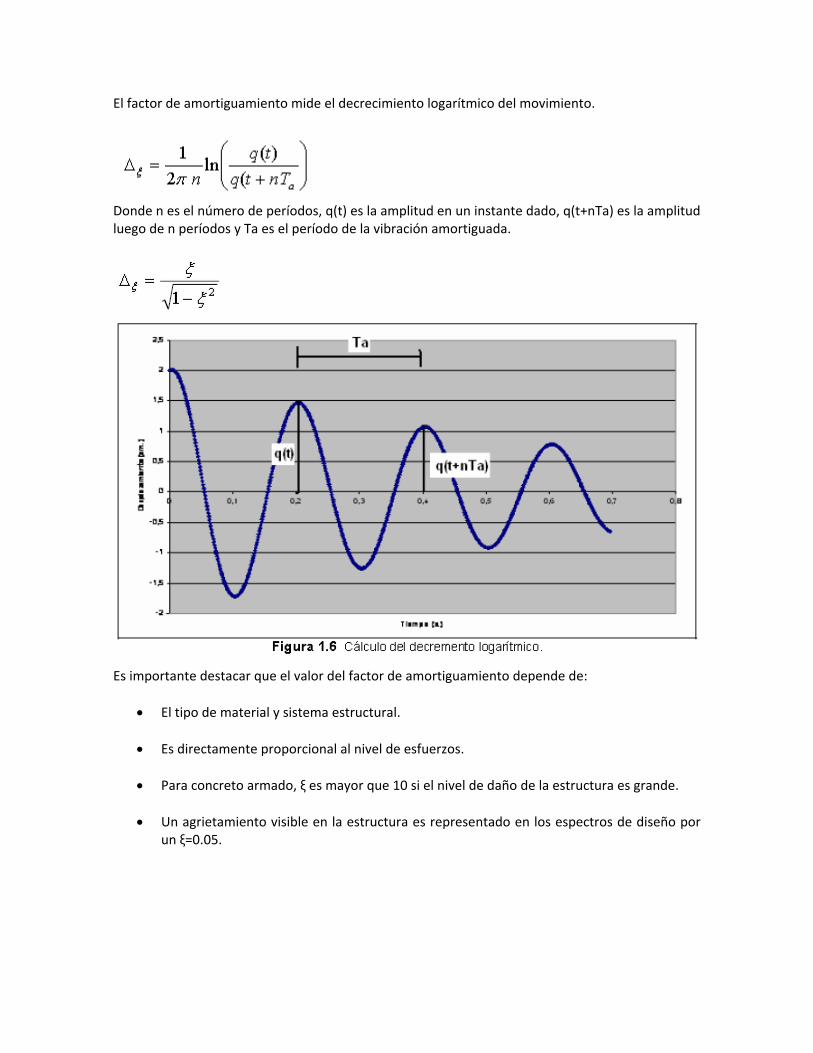
El factor de amortiguamiento mide el decrecimiento logarítmico del movimiento.
Donde n es el número de períodos, q(t) es la amplitud en un instante dado, q(t+nTa) es la amplitud luego de n períodos y Ta es el período de la vibración amortiguada.
Es importante destacar que el valor del factor de amortiguamiento depende de:
El tipo de material y sistema estructural.
Es directamente proporcional al nivel de esfuerzos.
Para concreto armado, ξ es mayor que 10 si el nivel de daño de la estructura es grande.
Un agrietamiento visible en la estructura es representado en los espectros de diseño por un ξ=0.05.

Vibraciones Forzadas: Sin Amortiguamiento: Para mantener un sistema oscilando es necesario suministrar energía al sistema, cuando esto se lleva a cabo se dice que la vibración es forzada. Si se introduce energía en el sistema a un ritmo mayor del que se disipa, la energía aumenta con el tiempo, lo que se manifiesta por un aumento de la amplitud del movimiento. Si la energía se proporciona al mismo ritmo que se disipa, la amplitud permanece constante con el tiempo. La ecuación diferencial del movimiento, teniendo en cuenta que la fuerza es de tipo periódico, es
Donde Fo es la amplitud y w es la frecuencia de la fuerza excitante. Así la solución general tiene por expresión:
Una característica muy significativa del movimiento oscilatorio tiene lugar cuando la fuerza excitadora de las vibraciones tiene unas frecuencias particulares, para cada sistema dado, produciéndose cambios de configuración de los sistemas mecánicos que alcanzan amplitudes notables, y generalmente, ocasionan un fallo estructural del material sometido a esfuerzos de rotura: efectos resonantes. Este riesgo se produce incluso con fuerzas excitadoras muy pequeñas ya que depende de las características del material sometido a vibración. Cuando la frecuencia de la fuerza exterior es igual a la frecuencia natural del sistema (w=wn), la ecuación se torna en:

Con Amortiguamiento: Es el mismo procedimiento que las que no tienen amortiguamiento pero agregándole esa fuerza excitatoria que la amortigue por lo que la nueva ecuación se vería de la siguiente manera:
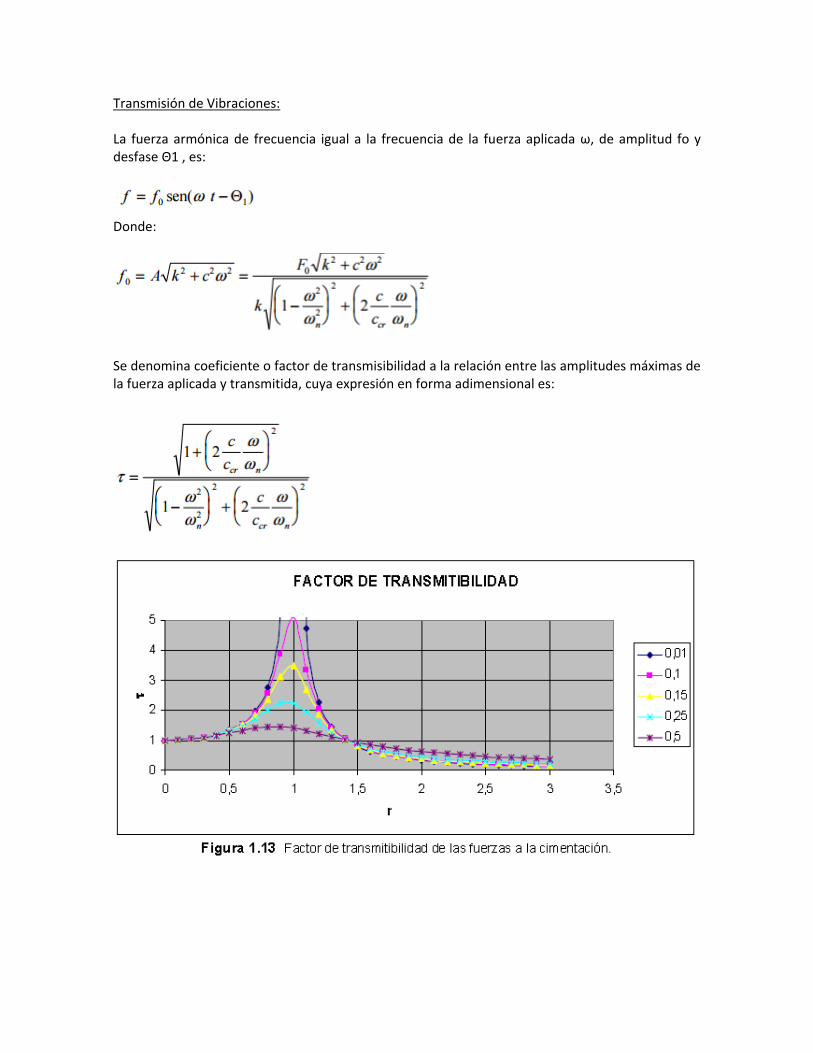
Transmisión de Vibraciones: La fuerza armónica de frecuencia igual a la frecuencia de la fuerza aplicada ω, de amplitud fo y desfase Θ1 , es:
Donde:
Se denomina coeficiente o factor de transmisibilidad a la relación entre las amplitudes máximas de la fuerza aplicada y transmitida, cuya expresión en forma adimensional es:

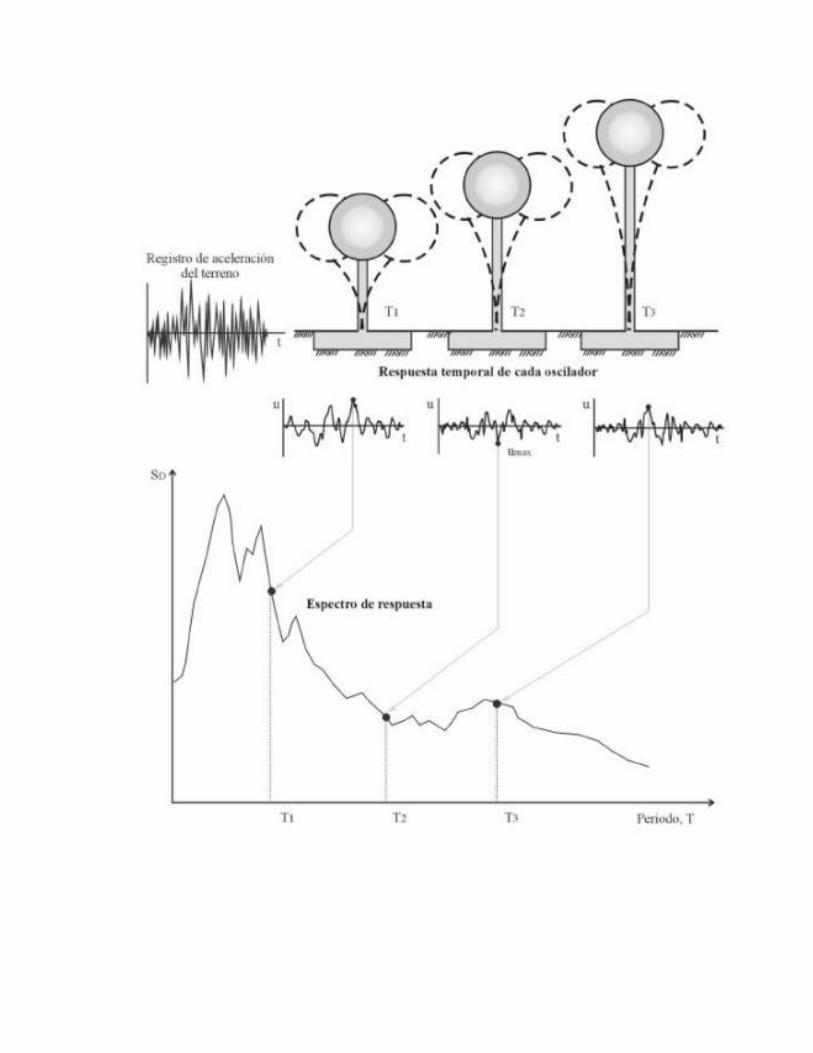
Espectros de Respuesta: El espectro de respuesta es la respuesta máxima de un conjunto de osciladores de 1gdl con el mismo amortiguamiento sometidas a una serie de aceleraciones dadas.
Es importante destacar que al graficar T-Sd se obtiene el espectro de desplazamientos, T-Sv el de velocidades y T-Sa el de aceleraciones. Donde:

Los espectros de respuesta proporcionan información muy valiosa ya que gracias a ellos se puede inferir cuáles serán las estructuras que se verán sometidas a mayores fuerzas sísmicas.
Las fuerzas a las que se ve sometido un edificio relacionan el peso de este con la aceleración que se produce en el terremoto. Los espectros son unas curvas que le permiten al ingeniero calcular esa fuerza sísmica. Las construcciones civiles generalmente poseen niveles de amortiguamiento en el rango de 2 a 7% y para edificaciones normales, se asume que es de 5%. De esta manera, la forma de los espectros de diseño está íntimamente ligada a la zona sísmica y el tipo de suelo donde se ubican las construcciones. Uno de los principales usos de los datos acelerográficos es precisamente para calcular dichos espectros y en este caso se presentan los mismos para cada estación acelerográfica solo en la componente NS para el 0% y 5% de amortiguamiento.
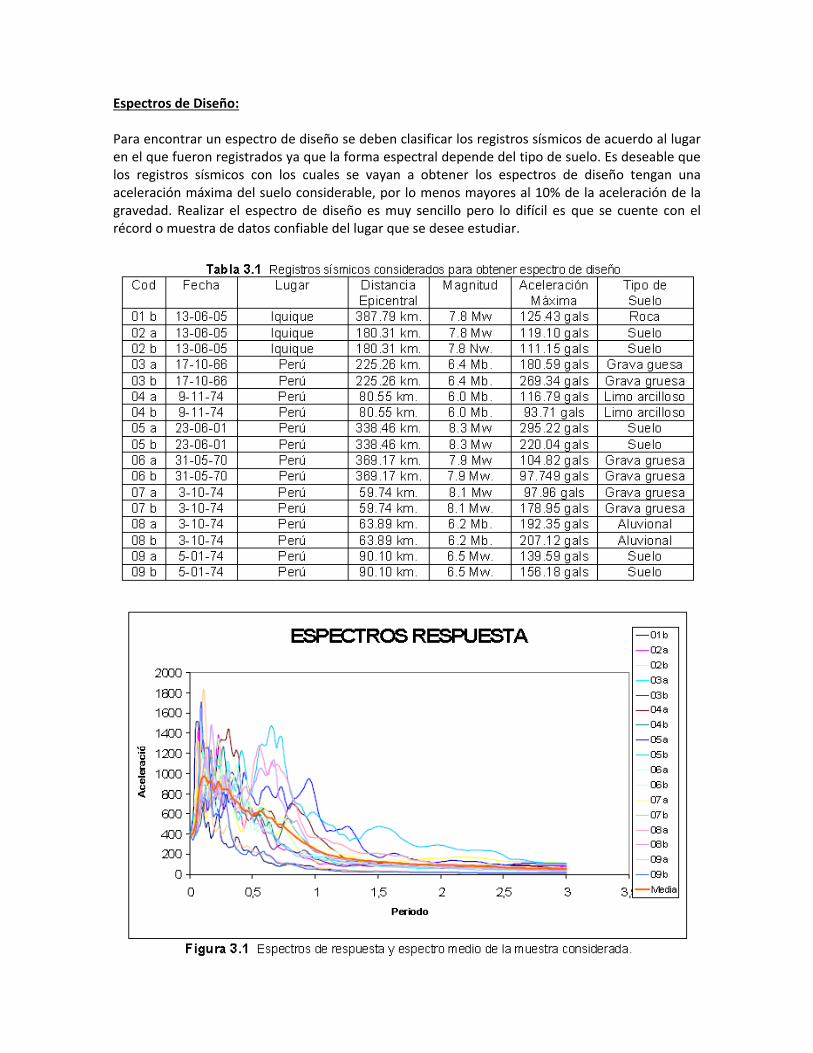
Espectros de Diseño: Para encontrar un espectro de diseño se deben clasificar los registros sísmicos de acuerdo al lugar en el que fueron registrados ya que la forma espectral depende del tipo de suelo. Es deseable que los registros sísmicos con los cuales se vayan a obtener los espectros de diseño tengan una aceleración máxima del suelo considerable, por lo menos mayores al 10% de la aceleración de la gravedad. Realizar el espectro de diseño es muy sencillo pero lo difícil es que se cuente con el récord o muestra de datos confiable del lugar que se desee estudiar.


Las construcciones no pueden diseñarse para resistir un terremoto en particular en una zona dada, puesto que el próximo terremoto probablemente presentará características diferentes. Por lo tanto, los espectros de respuesta elástica o inelástica, descriptos previamente, no pueden utilizarse para el diseño sismorresistente. Es por ello que el diseño se realiza a partir de espectros que son suavizados (no tienen variaciones bruscas) y que consideran el efecto de varios terremotos, es decir que representan una envolvente de los espectros de respuesta de los terremotos típicos de una zona. Los espectros de diseño se obtienen generalmente mediante procedimientos estadísticos, cuya descripción detallada escapa al alcance de este trabajo. Es muy importante que distingamos entre espectros de respuesta, que se obtienen para un terremoto dado, y espectros de diseño, los cuales se aplican al cálculo y verificación de estructuras y representan la sismicidad probable del lugar. A los efectos del diseño resulta conveniente que las curvas espectrales se suavicen con líneas envolventes para evitar los valles o variaciones bruscas que surgen de las formas complejas que presentan los espectros de respuesta. Es por ello que los espectros de diseño que definen los códigos están formados por una serie de líneas o curvas, las cuales pueden expresarse mediante ecuaciones simples. Los espectros de diseño de aceleración suelen presentar una rama lineal creciente luego una zona de aceleración constante, o plafón, con un valor 2 a 3 veces superior a la aceleración máxima del terreno y finalmente una o más curvas decrecientes. El Código de Construcciones Sismorresistentes de Mendoza, 1987 (vigente en algunos municipios de la provincia) no presenta en forma explícita un espectro de aceleraciones sino un factor de influencia del terreno. Para el caso de análisis dinámico este código plantea la determinación de la aceleración espectral mediante la siguiente expresión:
donde Co es el coeficiente sísmico, γd un factor de destino y s el coeficiente de influencia de suelo, que es función del periodo de vibración. Dicho coeficiente representa en forma implícita el espectro de respuesta. En la Figura 15 se grafican los valores de Co s, lo cual puede interpretarse como una la aceleración espectral básica expresada en unidades de g.
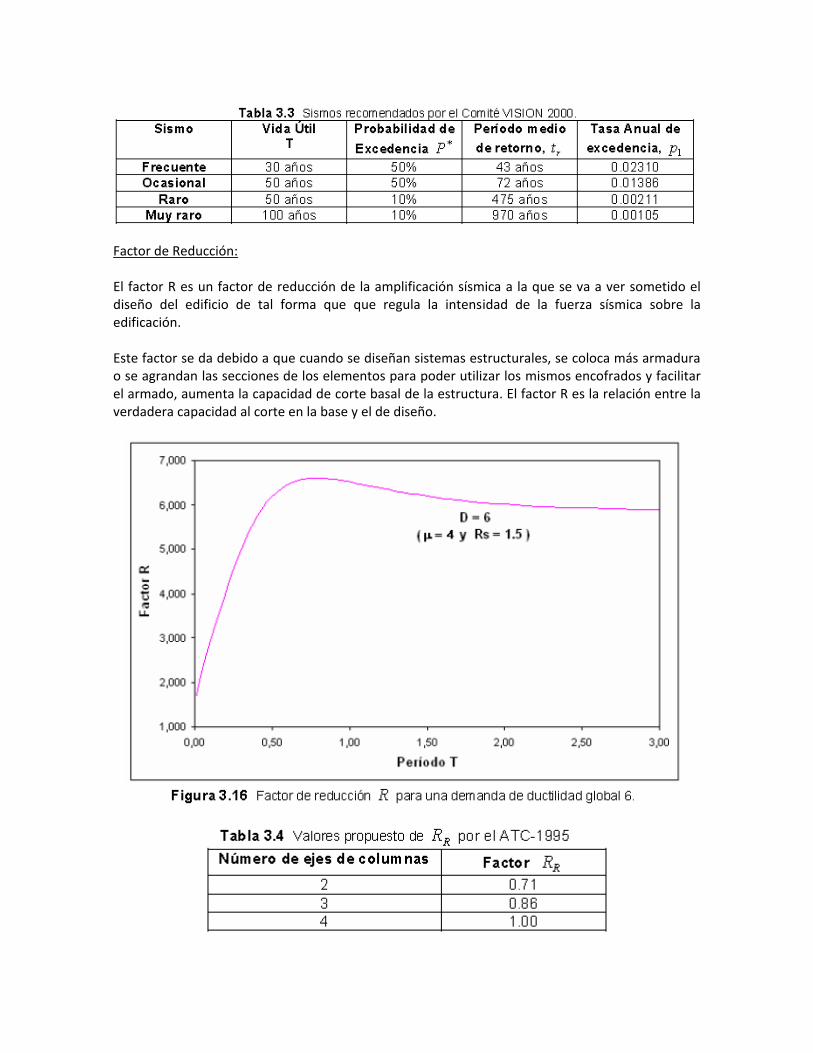
Factor de Reducción: El factor R es un factor de reducción de la amplificación sísmica a la que se va a ver sometido el diseño del edificio de tal forma que que regula la intensidad de la fuerza sísmica sobre la edificación. Este factor se da debido a que cuando se diseñan sistemas estructurales, se coloca más armadura o se agrandan las secciones de los elementos para poder utilizar los mismos encofrados y facilitar el armado, aumenta la capacidad de corte basal de la estructura. El factor R es la relación entre la verdadera capacidad al corte en la base y el de diseño.

Matriz de Rigidez: En análisis lineal se considera que la rigidez a flexión es constante por lo que la matriz de rigidez tanto de un elemento como de toda la estructura también lo es. El objetivo del análisis estructural es determinar los elementos mecánicos, (fuerzas y momentos) de los elementos estructurales para proceder al diseño de acuerdo al tipo de material usado y revisar la estabilidad general de la estructura. Por lo general los materiales estructurales más frecuentemente usados son el concreto reforzado y el acero estructural, existen reglamentos aplicables al diseño de esos tipos de materiales siendo la entrada de datos las fuerzas y momentos obtenidos del análisis estructural. Los desplazamientos relativos entre los elementos estructurales deben de considerarse también en el diseño, porque si estos son muy grandes, entonces ya no se estaría cumpliendo con la teoría de elasticidad, la cual indica que las deformaciones en el material deben ser menores al límite elástico del mismo. Al analizar una estructura mediante un programa de computadora, este no nos avisara cuando el material a salido del rango elástico por la aplicación de una fuerza excesiva, a menos que sea un análisis en donde la fuerza se aplica a pasos y en cada paso se revisa el nivel de esfuerzos para cada elemento estructural dando aviso cuando se sobrepasa el limite elástico del material. También debe considerarse las cargas de pandeo de los elementos estructurales para no afectar la estabilidad general de la estructura. En caso de que la estructura esté sujeta a cargas dinámicas se deberá determinar la aceleración máxima para diferentes partes de la estructura, así como los desplazamientos máximos, algunas veces es necesario determinar los histogramas de respuesta de aceleración y desplazamiento.
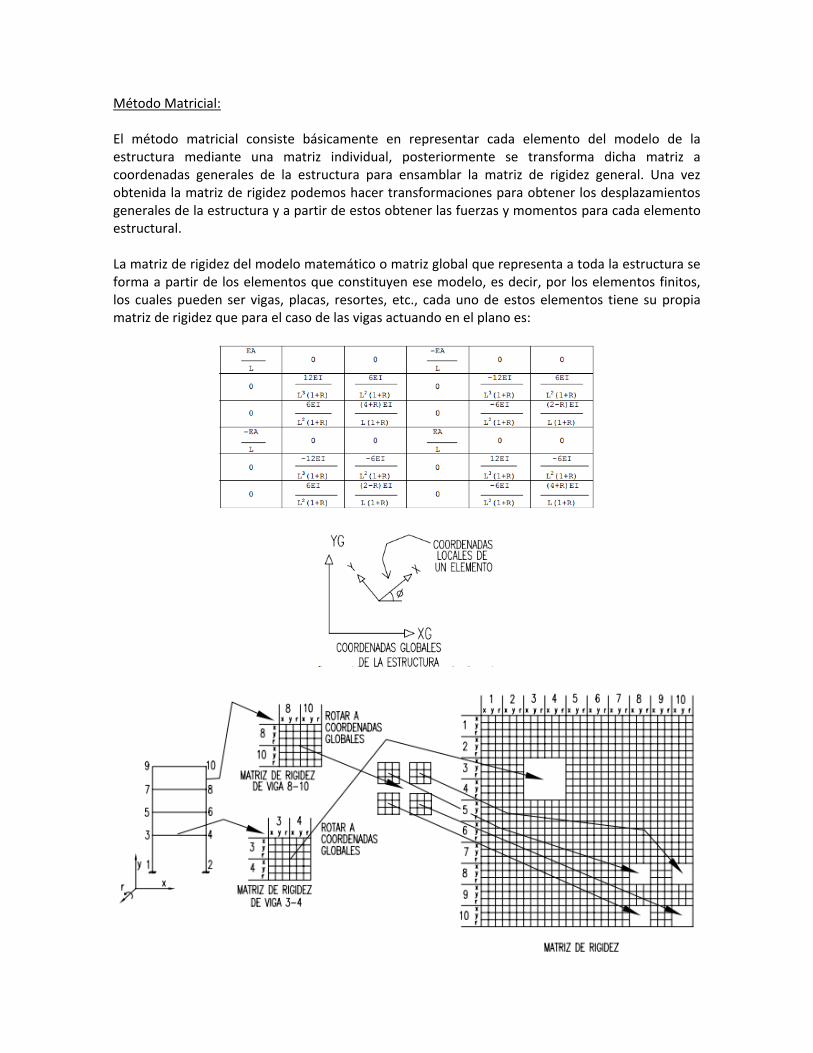
Método Matricial: El método matricial consiste básicamente en representar cada elemento del modelo de la estructura mediante una matriz individual, posteriormente se transforma dicha matriz a coordenadas generales de la estructura para ensamblar la matriz de rigidez general. Una vez obtenida la matriz de rigidez podemos hacer transformaciones para obtener los desplazamientos generales de la estructura y a partir de estos obtener las fuerzas y momentos para cada elemento estructural. La matriz de rigidez del modelo matemático o matriz global que representa a toda la estructura se forma a partir de los elementos que constituyen ese modelo, es decir, por los elementos finitos, los cuales pueden ser vigas, placas, resortes, etc., cada uno de estos elementos tiene su propia matriz de rigidez que para el caso de las vigas actuando en el plano es:

Matriz de Masas: Los nudos interiores tienen tres grados de libertad, de ahí el primer producto. Se destaca que las coordenadas principales son aquellas que se necesitan para definir la posición de las masas. El centro de masas se halla en L/2 debido a que el elemento es de sección constante y la masa está uniforme distribuida. Por lo tanto, se debe hallar los desplazamientos y giros en L/2 , para el efecto es conveniente dibujar una deformada general y obtener los corrimientos y giros en el centro de masa.
La matriz de masa se forma de acuerdo a los grados de libertad dinámico que se requiera considerar, por lo general, los modelos matemáticos son del tipo de vigas y masas concentradas que para el caso de un edificio se concentra la masa en las losas de piso, de acuerdo a la distribución de la masa en la losa de piso se debe considerar la inercia rotacional de la masa, siendo esta la masa por la distancia al cuadrado. Lo anterior da como resultado una matriz diagonal.

En el análisis dinámico de estructuras por lo general es conveniente únicamente considerar los grados de libertad dinámicos suficientes para determinar la respuesta estructural porque de lo contrario se requeriría mucho tiempo y memoria de máquina para resolver un problema determinado.

Modos de Vibración: En realidad, las estructuras son tridimensionales y pueden desplazarse o deformarse en las 3 direcciones del espacio (grados de libertad), además de poder girar respecto a sí mismas con varios ejes de rotación diferentes.
Existen varios “modos” o “formas “en los que una estructura puede vibrar u oscilar frente a una excitación sísmica determinada. Cada modo tiene además una deformada característica y una frecuencia de vibración asociada diferente. En realidad, una estructura sometida a un sismo vibrará según una combinación de diferentes modos de vibración. La extinta norma NCSE-94 solo estudiaba los 3 modos de vibración “fundamentales” de una estructura, pues consideraba que son los más destructivos y que los restantes no tienen influencia practica ninguna. De hecho, el primer modo de vibración coincide con la frecuencia natural o propia del edificio, es decir, aquella a la que se supone que responderá de forma prioritaria. Eso ha cambiado con la actual NCSE-2002 que obliga al menos a estudiar 3 modos de vibración por planta del edificio, siendo habitual superar los 9-12 o 15 para edificios de no demasiadas alturas. Además se estudiarán estos modos tanto en la dirección x como en la y. En general, no se estudian modos de vibración cuyos periodos difieran en menos del 10% respecto al periodo anterior considerado y, para cada uno de ellos, se obtendrán datos de la curva de espectro normalizado (aceleración de respuesta), introduciendo además parámetros adicionales como la “ductilidad “ (µ) de la estructura, factor de distribución de la masa, etc. De este modo, se puede obtener el desplazamiento de cada forjado (planta) frente a la acción sísmica en un determinado modo de vibración. Conocido ese desplazamiento, es fácil relacionarlo con las fuerzas (equivalentes), que “generaría” el seísmo sobre la misma, en cada modo de vibración especifico. Para el dimensionado de elementos estructurales, se obtiene una combinación de las fuerzas sísmicas obtenidas para cada modo de vibración. Al final, resultará una hipótesis de cálculo de sismo en dirección x y otra en dirección y, que se combinará con el resto de fuerzas actuantes en la estructura (gravitatorias, sobrecargas), para el cálculo de la estructura.

El análisis modal se utiliza para determinar los modos de vibración de una estructura. Estos modos son útiles para entender el comportamiento de la estructura. También se puede utilizar como la base para la superposición modal en respuesta al espectro y casos de análisis modal en la historia en el tiempo.
Un análisis modal se define mediante la creación de un caso de análisis y el establecimiento de su tipo "Modal". Se puede definir varios casos de análisis modal, resultando varios conjuntos de modos. Hay dos tipos de análisis modal para elegir , a la hora de definirun caso de análisis modal: Análisis de Vector Propio: Determina las vibraciones no amortiguadas libres formas modales y frecuencias del sistema. Estos modos naturales proporcionan una excelente visión sobre el comportamiento de la estructura. Análisis del vector Ritz: Trata de encontrar modos que son movidos por una carga en particular. Los Vectores Ritz pueden proporcionar una mejor base que los vectores propios cuando se utiliza para respuesta del espectro o el análisis de historia en el tiempo que se basan en la superposición modal. El análisis del vector propio involucra la solución de los valores propios generados en el problema:
Donde K es la matriz de rigidez, M es la matriz de masa diagonal, Ω es la diagonal matriz de valores propios, y Φ es la matriz de vectores propios. Cada par de valores del vector propio se denomina modo natural de vibración de la estructura. Los modos son identificados por números de 1 a n en el orden en que los modos se encuentran en el programa. El valor propio es el cuadrado de la frecuencia angular de ese modo.

Bibliografía:
Clough, R. W. y Penzien, J., Dynamics of Structures. Mc Graw Hill Inc. Second Edition, 1993.
Chopra, A., Dynamics of Structures: Theory and Applications to Earthquake Engineer. Prentice Hall, Inc., 1995
The EERI Oral History Series: Georges W. Housner. Earthquake Engineering Research Institute. 1997.
Kramer, S. L., Geotechnical Earthquake Engineering. Prentice Hall, 1996
Libros proporcionados en clase: o Dinámica Estructural Simplificada, Guillermo Díaz o Dinámica de Estructuras con Matlab, Roberto Aguilar o Normas de Seguridad Estructural y Obras de Infraestructura para la República de
Guatemala, AGIES NSE 3-10