research article lqg control of networked control systems...
TRANSCRIPT
Research ArticleLQG Control of Networked Control Systems withLimited Information
Qing-Quan Liu12 and Fang Jin1
1 College of Equipment Engineering Shenyang Ligong University Shenyang 110168 China2 Shenyang Institute of Automation Chinese Academy of Sciences Shenyang 110016 China
Correspondence should be addressed to Qing-Quan Liu lqqneu163com
Received 1 August 2014 Accepted 26 October 2014 Published 13 November 2014
Academic Editor Hak-Keung Lam
Copyright copy 2014 Q-Q Liu and F JinThis is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper addresses linear quadraticGaussian (LQG) control problems formulti-inputmultioutput (MIMO) linear time-invariant(LTI) systems where the sensors and controllers are geographically separated and connected via a digital communication channelwith limited data rates An observer-based quantized state feedback control scheme is employed in order to achieve the minimumdata rate for mean square stabilization of the unstable plant An explicit expression is presented to state the tradeoff between theLQ cost and the data rate Sufficient conditions on the data rate for mean square stabilization are derived An illustrative exampleis given to demonstrate the effectiveness of the proposed scheme
1 Introduction
In recent years networked control systems have attractedunprecedented attention of the control community in view oftheir wide applications in many fields such as vehicle controlsystems large-scale printers and aerospace applications Insuch systems the sensors actuators and controllers are geo-graphically separated and connected via digital wireless chan-nels such as the Internet or bus lines Using networked controloffers many advantages such as increased system flexibilityease of installation and maintenance and decreased wiringand cost However the presence of digital communicationchannels brings up many challenges Communication con-straints often make traditional control approaches inefficient[1 2]
In particular the problem of control under data-ratelimitations has been the focus of many researches A high-water mark in the study of quantized feedback using data ratelimited feedback channels is known as the data rate theoremthat states that the larger the magnitude of the unstable polesthe larger the required data rate through the feedback loop[3 4]
There has been a lot of research on quantized feedbackcontrol It was shown in [5] that there exists a dynamicadjustment of the quantizer sensitivity and a quantized state
feedback that stabilizes linear time-invariant systems withoutdisturbances The problem of LQG control under communi-cation constraints was addressed in [6] There they looked atstable systems and noiseless digital channels and introducedthe new coding scheme Tatikonda at al [7] examined the rolecommunication has on the classical LQG control problemand designed the encoder decoder and controller to satisfysome given control objective Imer and Basar [8] consideredoptimal LQG control of a scalar system with limited controlactions Schenato et al [9] considered the problem of LQGcontrol over a packet-dropping network Furthermore Bom-mannavar and Basar [10] addressed optimal LQG controlof higher-order systems with limited control actions Itwas shown that the optimal control is a threshold policyFurthermore in [11] the LQG control problem for stochasticlinear control systems was addressed In particular thesequential rate distortion framework was presented and theinherent tradeoffs between control and communication costswas shown in [7] The optimal LQ cost is decomposedinto two terms a full knowledge cost and a sequential ratedistortion cost However the second term still depends onthe steady state estimation error covariance Differently fromthe existing ones it is shown in our results that the steadystate estimation error depends on the disturbances and a fullknowledge LQ cost is presented Furthermore Georges et al
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 206391 12 pageshttpdxdoiorg1011552014206391
2 Mathematical Problems in Engineering
Plant Sensor Encoder
Channel
DecoderController
Figure 1 Networked control systems
[12] gave the design of a decentralized optimal batch LQ stateobserver for state estimation of large-scale interconnectedsystems and Wang and Han [13] was concerned with mod-elling and controller design for a discrete-time networkedcontrol system with limited channels and data drift
This paper considers a class of networked control prob-lems which arises in the coordinated motion control ofautonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)The controller often lies in such unmanned vehicles but somesensors (such as automatic radar measuring equipment) areon the ground and are connected with the controllers vianoisy bandwidth-limited wireless communication channelsHowever as the data rate of the channel is reduced to the crit-ical value the plant states must always become unboundedThen in engineering systems it is of importance to presenta lower bound of the data rate above which there exists aquantization coding and control scheme to guarantee somegiven control performances
The aforementioned results considered the fully observedsystems This paper considers a partially observed lineartime-invariant system and employs an observer-based quan-tized state feedback control scheme in order to achievethe minimum data rate for mean square stabilization ofthe unstable plant Furthermore LQG control problems arefurther addressed under data-rate limitations It is shown thatthere exists the tradeoff between the LQ cost and the data rateThen an explicit expression on the tradeoff is presented in ourresults
The rest of the paper is organized as follows In Section 2the problem formulation is presented Section 3 deals withLQG control problems under data-rate limitations Theresults of numerical simulation are presented in Section 4Conclusions are stated in Section 5
2 Problem Formulation
Consider the following discrete linear time-invariant systemin Figure 1 The system dynamics is given by
119883(119896 + 1) = 119860119883 (119896) + 119861119880 (119896) + 119865119882 (119896)
119884 (119896) = 119862119883 (119896)
(1)
where 119883(119896) isin 119877119899 denotes the plant state 119880(119896) isin 119877
119898 denotesthe control input 119884(119896) isin 119877
119901 denotes the observation output
and 119882(119896) isin 119877119902 denotes the disturbance respectively The
initial position 119883(0) and 119882(119896) are mutually independentGaussian random variables with zero mean satisfying
119864 119883 (0)2
lt 1206010lt infin
119864 119882 (119896)2
lt 120601119882
lt infin
(2)
119860 119861 119862 and 119865 are known constant matrices with appropriatedimensions Without loss of generality assume that thepair (119860 119861) is a controllable pair and the pair (119860 119862) is anobservable pair
In the MIMO case it seems logical to try to implement aquantized output feedback control law of the form
119880 (119896) = 119870119902 (119884 (119896)) (3)
where 119902(sdot) denotes a quantizer and 119870 denotes the feedbackgain However it is difficult to find a bit-allocation algorithmwhich can regulate the transmission of information abouteach 119910
119894(119896) (119894 = 1 2 119901) since 119910
119894(119896) and 119910
119895(119896) (119894 = 119895) often
aremutually correlated Namely it leads to the larger data ratefor stabilization Thus this paper implements an observer-based quantized state feedback control law of the form
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896) + 119871 (119884 (119896) minus 119862119883
119900(119896))
119880 (119896) = 119870119883119900(119896)
(4)
where 119871 denotes the observer gain and 119883119900(119896) denotes the
estimate of119883119900(119896) at the decoder Here define
119863 (119896) = 119883 (119896) minus 119883119900(119896) (5)
Then it follows from (4) that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896) + 119871119862119863 (119896) (6)
By summing (1) and (6) obtain that
119863 (119896 + 1) = (119860 minus 119871119862)119863 (119896) + 119865119882 (119896) (7)
Here assume that there exists an observer gain 119871 such that alleigenvalues of 119860 minus 119871119862 lie inside the unit circle Then it holdsthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)] lt
1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882 (8)
In the literature many works were concerned withnetworked control over dropout channels or the channelswith time delays and presented many important resultsDifferently from the existing results this paper considersthe case where the sensors and the controller are connectedvia errorless digital communication channels without timedelays and focuses on the tradeoff between the LQ cost andthe data rate of the channel Furthermore assume that thechannel is memoryless Then the encoder and the decoderhave access to the control actions Considering this caseavoids extraneous complexity It makes our conclusions mosttransparent
Mathematical Problems in Engineering 3
This paper considers the MIMO system (1) under data-rate limitations and presents a quantization coding andcontrol scheme to stabilize the system (1) in the mean squaresense
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt infin (9)
Furthermore LQG control problems are also further dis-cussed under data-rate limitations and the role that com-munication has on the classical LQG control problem isexplicitly examined The main task here is to present anexplicit expression on the tradeoff between the LQ cost andthe data rate
3 LQG Control for MIMO Systems underData-Rate Limitations
This section considers the partially-observed unstable lineartime-invariant plant discusses the LQG control problemunder data-rate limitations derives the sufficient conditionon the data rate for stabilization and presents the relationshipbetween the control performance and the data rate
In order to achieve the minimum data rate for stabi-lization the existing bit-allocation scheme needs to finda real transformation matrix which can diagonalize thesystem matrix such that it can regulate the transmissionof information on the basis of the eigenvalues In manyapplications however there exists no transformation matrixthat can diagonalize any systemmatrix Furthermore puttingthe system matrix into Jordan canonical form often requiresa complex transformation matrix To solve the problem abit-allocation scheme on the basis of the singular valuesof system matrix and an adaptive differential quantization-coding scheme are employed in this paper
Notice that there must exist a real orthogonal matrix119867 isin
119877119899times119899 that diagonalizes
1198601015840
119860 = 1198671015840
Λ2
119867 (10)
where we define Λ = diag[1205901 120590
119899] Clearly 120590
119894is the
119894th singular value of 119860 (119894 = 1 2 119899) Here define theprediction value of119883
119900(119896) by
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1) (11)
Furthermore define
119883119900(119896) = 119867119883
119900(119896)
119883119900(119896) = 119867119883
119900(119896)
119900(119896) = 119867
119900(119896)
119885 (119896) = 119883119900(119896) minus
119900(119896)
(12)
Since the encoder and the decoder have access to theprevious control actions update their estimator and obtainthe same prediction value only 119885(119896) needs to be quantizedencoded and transmitted to the decoder Let 119885(119896) and 119881(119896)
denote the quantization value and quantization error of119885(119896)respectively Then it follows that
119885 (119896) = 119885 (119896) + 119881 (119896) (13)
Thus the estimate of119883119900(119896) is given by
119883119900(119896) = 119867
1015840
(119900(119896) + 119885 (119896)) (14)
Similar to that in [5] the quantization scheme is pre-sented Let 119885(119905) = [119911
1(119905) 119911
2(119905) sdot sdot sdot 119911
119899(119905)]1015840 Given a
positive integer119872119894and a nonnegative real number Δ
119894(119905) (119894 =
1 119899) define the quantizer 119902 119877 rarr 119885 with sensitivityΔ119894(119905) and saturation value119872
119894by the formula
119902 (119911119894(119905))
=
119872+
if 119911119894(119905) gt (119872
119894+
1
2)Δ119894(119905)
119872minus
if 119911119894(119905) le minus (119872
119894+
1
2)Δ119894(119905)
lfloor119911119894(119905)
Δ119894(119905)
+1
2rfloor if minus (119872
119894+
1
2)Δ119894(119905) lt 119911
119894(119905)
119911119894(119905) le (119872
119894+
1
2)Δ119894(119905)
(15)
where we define lfloor119911rfloor = max119896 isin 119885 = 119896 lt 119911 119911 isin 119877The indexes 119872
+ and 119872minus will be employed if the quantizer
saturates The scheme to be used here is based on thehypothesis that it is possible to change the sensitivity (butnot the saturation value) of the quantizer on the basisof available quantized measurements The quantizer maycounteract disturbances by switching repeatedly betweenldquozooming outrdquo and ldquozooming inrdquo
First a lemma from [14] is presented
Lemma 1 Let 119911 isin 119877 denote a Gaussian source and denote anestimate of 119911 Define 119877(119863) as the data rate distortion functionbetween and 119911The distortion constraint is defined as119863 isin 119877
+Let ℎ denote the sampling period Given 119863 ge 119864(119911 minus )
2 theremust exist a quantization and coding scheme if the informationrate 119877 of the channel satisfies
119877 gt1
ℎ119877 (119863) ge
1
2log2
1205902
(119911)
119863(119887119894119905119904119904119886119898119901119897119890) (16)
where one defines 1205902(119911) = 119864(119911 minus 119864119911)2
Proof The proof is given by [14]
In networked control systems with large communicationbandwidth communication and control are often viewed asindependent functions in order to simplify the analysis anddesign of the overall system However in many applicationsdata-rate limitations can introduce large quantization errorsand affect control performances significantly Thus thispaper is concerned with the relationship between the controlperformance and the data rate
Here the LQ cost is quantified by
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)] (17)
4 Mathematical Problems in Engineering
where 119876 isin 119877119899times119899 is symmetric positive definite Here this
paper is concernedwith how small the plant state can bemadeas 119896 rarr infin Then the following result holds
Theorem 2 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle Then thesystem (1) is stabilizable in themean square sense (9) if the datarate of the channel satisfies the following condition
119877 gt 119877min = sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816 (119887119894119905119904119904119886119898119901119897119890) (18)
with Ξ = 119894 isin 1 2 119899 |120590119894| gt 1 If one further assumes
that the magnitudes of all the singular values of system matrix119860 are larger than 1 the system (1) is stabilizable in the meansquare sense (9) if the data rate of the channel satisfies thefollowing condition
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (19)
Furthermore the LQ cost 1198691is obtained by
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(20)
Proof Notice that
119883(119896) = 119883119900(119896) + 119863 (119896) (21)
Then it holds that
119864 [1198831015840
(119896) 119876119883 (119896)] = 119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ 119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2119864 [1198831015840
119900(119896) 119876119863 (119896)]
(22)
Furthermore notice that
119883119900(119896) =
119900(119896) + 119867
1015840
119885 (119896) (23)
Then it follows that
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
= 119864 [( (119896) + 1198671015840
119885 (119896))1015840
119876( (119896) + 1198671015840
119885 (119896))]
= 119864 [1015840
119900(119896) 119876
119900(119896)] + 119864 [119885
1015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
(24)
Thus it follows that
119864 [1198831015840
(119896) 119876119883 (119896)]
= 119864 [1015840
119900(119896) 119876
119900(119896)] + 119864 [119885
1015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2119864 [119900(119896)119867119876119867
1015840
119885 (119896)] + 119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2119864 [1198831015840
119900(119896) 119876119863 (119896)]
(25)
Namely it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
(26)
Clearly it needs to compute all the terms in the equationabove
It follows from (4) and (6) that
119883119900(119896 + 1)
= 119860119883119900(119896) + 119861119870119883
119900(119896) + 119871119862119863 (119896)
= 119860 (119883119900(119896) minus 119883
119900(119896)) + (119860 + 119861119870)119883
119900(119896) + 119871119862119863 (119896)
= 1198601198671015840
119881 (119896) + 119900(119896 + 1) + 119871119862119863 (119896)
(27)
Mathematical Problems in Engineering 5
Namely it holds that
119885 (119896 + 1) = 1198671198601198671015840
119881 (119896) + 119867119871119862119863 (119896) (28)
Notice that119881(119896) and119863(119896) are mutually independent randomvariables Let119883 denote a vector Then define
Σ119883
= 119864 [1198831198831015840
] (29)
Then it follows that
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= tr (1198671198761198671015840
Λ2
Σ119881(119896)
) + 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(30)
Since 119885(119896) is unknown for the decoder it will be quantizedencoded and transmitted via a digital communication chan-nel with limited data rates If there exists a quantizationcoding scheme such that the following condition holds
119864 [1199112
119894(119896)] gt 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (31)
which is equivalent to
1205762
119864 [1199112
119894(119896)] = 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (32)
with 120576 isin (0 1) it holds that
1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] = tr (1198671198761198671015840
Λ2
Σ119881(119896)
) (33)
Substitute the equality above into (30) and obtain
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(34)
It means that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)]
lt1
1 minus 1205762lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(35)
Clearly the condition (31) must hold if the number of bitsneeded to the quantization value is large enough Let 119863
119894(119896)
denote the expected distortion constraint corresponding to119911119894(119896) at time 119896 Thus set
119863119894(119896) =
1205762
1205902
119894
119864 [1199112
119894(119896)] when 1003816100381610038161003816120590119894
1003816100381610038161003816 ge 1
0 when 10038161003816100381610038161205901198941003816100381610038161003816 lt 1
(36)
Then it follows from Lemma 1 that the data rate of thechannel is given by
119877 =1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
119863119894(119896)
=1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
(12057621205902
119894) 119864 [1199112
119894(119896)]
= sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816
120576(bitssample)
(37)
where we define Ξ = 119894 isin 1 2 119899 |120590119894| gt 1 A lower
bound on the data rate which ensures the condition (31) holdsis given by
119877min = sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816 (bitssample) (38)
If we assume that themagnitudes of all the singular valuesof system matrix 119860 are larger than 1 the data rate of thechannel is given by
119877 = log2
|119860|
120576119899(bitssample) (39)
and the lower bound on the data rate is given by
119877min = log2|119860| (bitssample) (40)
It may be also obtained that
120576 =119899
radic|119860|
2119877 (41)
Furthermore it follows from (6) that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119870119883
119900(119896) + 119871119862119863 (119896)
= (119860 + 119861119870)119883119900(119896) minus 119861119870119867
1015840
119881 (119896) + 119871119862119863 (119896)
(42)
By summing the equality above and (7) it follows that
119864 [1198831015840
119900(119896 + 1)119876119863 (119896 + 1)]
= 119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876 (119860 minus 119871119862)119863 (119896)]
+ 119864 [1198631015840
(119896) (119860 minus 119871119862)1015840
119876119871119862119863 (119896)]
(43)
6 Mathematical Problems in Engineering
Thus it follows that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(44)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876119871119862119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(45)
It follows from (31) that
1205762
[119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)]
= [119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
119864 [V2119894(119896)]
(46)
where [sdot]119894119895denotes an element of a matrix (119894 119895 = 1 2 119899)
This implies that
1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
(47)
Furthermore it follows from (28) that
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(48)
Substitute (47) into the equality above and obtain
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(49)
Then get
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(50)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(51)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
119876 (119860 + 119861119870)1198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(52)
Furthermore notice that
119900(119896) = 119867 (119860 + 119861119870) (119883
119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
119885 (119896) = 1198671198601198671015840
119881 (119896 minus 1) + 119867119871119862119863 (119896 minus 1)
(53)
Then it follows that
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
= 119864 [(119883119900(119896 minus 1) minus 119867
1015840
)1015840
(119860 + 119861119870)1015840
119876
times (1198601198671015840
119881 (119896 minus 1) + 119871119862119863 (119896 minus 1)) ]
= 119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
119876119871119862119863 (119896 minus 1)]
minus 119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896 minus 1)]
(54)
Substitute (45) and (51) into the previous equality and obtain
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
+
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(55)
Mathematical Problems in Engineering 7
Furthermore notice that
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1)
= (119860 + 119861119870) (119883119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
(56)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
times 119876 (119860 + 119861119870)119883119900(119896 minus 1) ]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896 minus 1)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896)]
(57)
Substitute (52) into the inequality above and obtain that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(58)
By summing (8) (26) (35) (41) (44) (55) and (58) obtainthat
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(59)
Now further consider the case with 119876 = 119868 where 119868
denotes an identity matrix Then the equality above mayreduce to
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
10038171003817100381710038171003817(119860 + 119861119870)119860
minus1
11987111986211986510038171003817100381710038171003817
2
+ 1198711198621198652
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119860minus1
11987111986211986510038171003817100381710038171003817)
8 Mathematical Problems in Engineering
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
(119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+ 1198652
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(60)
It means that the system (1) is stabilizable in the mean squaresense (9) if the data rate 119877 satisfies the following condition
119877 gt 119877min = log2|119860| (bitssample) (61)
Remark 3 (i) It is shown in Theorem 2 that the system (1) isstill stabilizable in the mean square sense (9) by employing abit-allocation scheme on the basis of not the eigenvalues butthe singular values of the systemmatrix Furthermore underthe special condition our result may reduce to the existingone in [1] and is not more conservative
(ii) No assumption that there exists a real transformationmatrix such that system matrix can be transformed to adiagonal matrix or a Jordan canonical form is made in thispaper Thus the bit-allocation scheme presented here doeswork for more general systems
Now consider the classical LQG control problem forMIMO linear time-invariant systems with data-rate limita-tions and discuss the effect of the data rate on the achievablecontrol performance Namely for a given data rate theproblem here is how to design the quantization codingand control scheme to achieve the optimal LQ cost Theperformance objective to be considered here is the averageinfinite horizon quadratic cost
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)] (62)
where119876 isin 119877119899times119899 and 119878 isin 119877
119898times119898 are symmetric positive definiteand (119860 119876
12
) is observable
Theorem 4 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle and themagnitudes of all the singular values of system matrix 119860 arelarger than 1The data rate of the channel satisfies the followinginequality
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (63)
Then the certainty equivalent control law of the form 119880(119905) =
119870119883119900(119905) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (64)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (65)
is optimal The corresponding optimal LQ cost 1198692is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(66)
Proof Notice that
119883119900(119896 + 1) = 119883
119900(119896 + 1) minus 119867
1015840
119881 (119896 + 1) (67)
Substitute (6) into the equality above and obtain that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896)
+ 119871119862119863 (119896) minus 1198671015840
119881 (119896 + 1)
= 119860119883119900(119896) + 119861119880 (119896) + 119871119862119863 (119896)
+ 1198601198671015840
119881 (119896) minus 1198671015840
119881 (119896 + 1)
(68)
Furthermore notice that
119883 (119896) = 119883119900(119896) + 119863 (119896) = 119883
119900(119896) + 119867
1015840
119881 (119896) + 119863 (119896) (69)
Then Tatikonda et al [7] addressed the classical LQG controlproblem under data-rate limitations and considered the samecase The optimal LQ cost decomposed into two terms afull knowledge cost and a sequential rate distortion costHowever the second term still depends on the steady stateestimation error covariance This paper further discusses theLQG control problem and presents a full knowledge cost Asstated in [7] the optimal steady state control law is a lineargain of the form 119880(119896) = 119870119883
119900(119896) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (70)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (71)
Mathematical Problems in Engineering 9
The optimal cost is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119905) 119876119883
119900(119905) + 119880
1015840
(119905) 119878119880 (119905)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198601015840
1198751198601198671015840
sum
119881(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198751198671015840
sum
119881(119896+1)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[(119871119862)1015840
119875119871119862sum
119863(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
(72)
Then it needs to compute all the terms in the equation aboveIt follows from (31) that
1205762
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)] = [119867119876119867
1015840
]119894119894
119864 [V2119894(119896)] (73)
Then it holds that
1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
(74)
Furthermore it follows from (30) that
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896 + 1)]
= [1198671198761198671015840
]119894119894
119864 [V2119894(119896)] + [(119871119862)
1015840
119876119871119862]119894119894
119864 [1198892
119894(119896)]
(75)
Then it holds that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(76)
Substitute (74) into the equality above and obtain that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(77)
This implies that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt1
1 minus 12057621198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(78)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(79)
Using the same techniques in the proof above it can beshown that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
lt
12057621003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(80)
10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
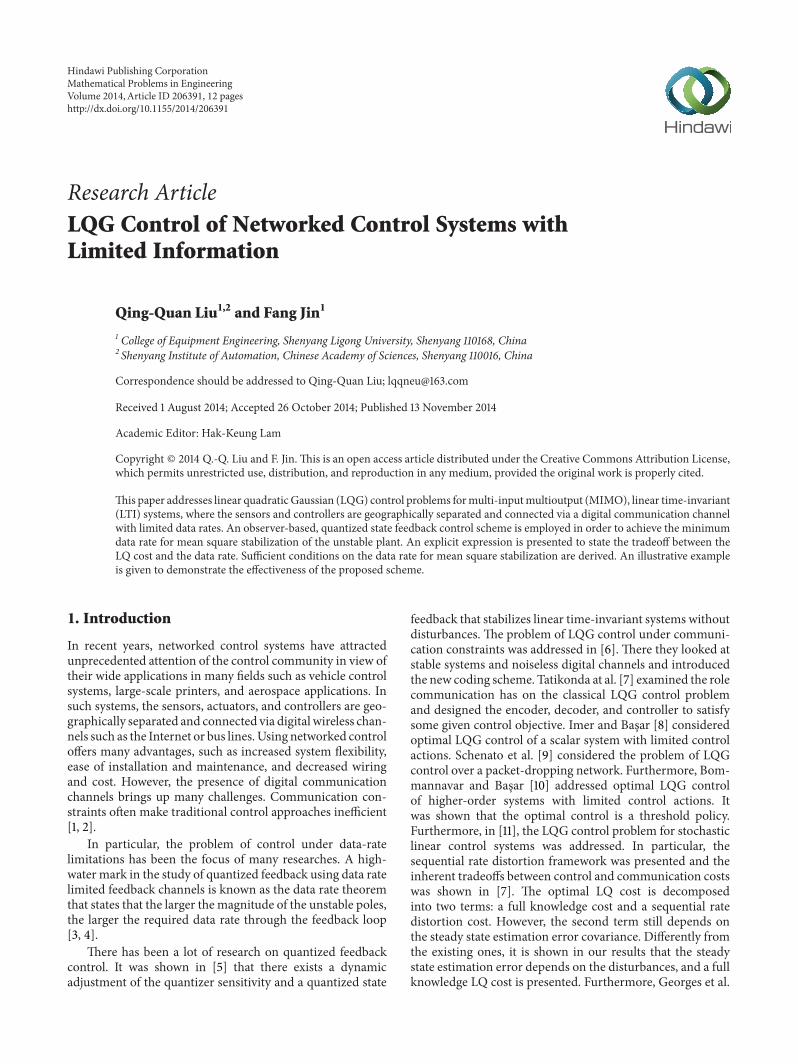
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Plant Sensor Encoder
Channel
DecoderController
Figure 1 Networked control systems
[12] gave the design of a decentralized optimal batch LQ stateobserver for state estimation of large-scale interconnectedsystems and Wang and Han [13] was concerned with mod-elling and controller design for a discrete-time networkedcontrol system with limited channels and data drift
This paper considers a class of networked control prob-lems which arises in the coordinated motion control ofautonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)The controller often lies in such unmanned vehicles but somesensors (such as automatic radar measuring equipment) areon the ground and are connected with the controllers vianoisy bandwidth-limited wireless communication channelsHowever as the data rate of the channel is reduced to the crit-ical value the plant states must always become unboundedThen in engineering systems it is of importance to presenta lower bound of the data rate above which there exists aquantization coding and control scheme to guarantee somegiven control performances
The aforementioned results considered the fully observedsystems This paper considers a partially observed lineartime-invariant system and employs an observer-based quan-tized state feedback control scheme in order to achievethe minimum data rate for mean square stabilization ofthe unstable plant Furthermore LQG control problems arefurther addressed under data-rate limitations It is shown thatthere exists the tradeoff between the LQ cost and the data rateThen an explicit expression on the tradeoff is presented in ourresults
The rest of the paper is organized as follows In Section 2the problem formulation is presented Section 3 deals withLQG control problems under data-rate limitations Theresults of numerical simulation are presented in Section 4Conclusions are stated in Section 5
2 Problem Formulation
Consider the following discrete linear time-invariant systemin Figure 1 The system dynamics is given by
119883(119896 + 1) = 119860119883 (119896) + 119861119880 (119896) + 119865119882 (119896)
119884 (119896) = 119862119883 (119896)
(1)
where 119883(119896) isin 119877119899 denotes the plant state 119880(119896) isin 119877
119898 denotesthe control input 119884(119896) isin 119877
119901 denotes the observation output
and 119882(119896) isin 119877119902 denotes the disturbance respectively The
initial position 119883(0) and 119882(119896) are mutually independentGaussian random variables with zero mean satisfying
119864 119883 (0)2
lt 1206010lt infin
119864 119882 (119896)2
lt 120601119882
lt infin
(2)
119860 119861 119862 and 119865 are known constant matrices with appropriatedimensions Without loss of generality assume that thepair (119860 119861) is a controllable pair and the pair (119860 119862) is anobservable pair
In the MIMO case it seems logical to try to implement aquantized output feedback control law of the form
119880 (119896) = 119870119902 (119884 (119896)) (3)
where 119902(sdot) denotes a quantizer and 119870 denotes the feedbackgain However it is difficult to find a bit-allocation algorithmwhich can regulate the transmission of information abouteach 119910
119894(119896) (119894 = 1 2 119901) since 119910
119894(119896) and 119910
119895(119896) (119894 = 119895) often
aremutually correlated Namely it leads to the larger data ratefor stabilization Thus this paper implements an observer-based quantized state feedback control law of the form
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896) + 119871 (119884 (119896) minus 119862119883
119900(119896))
119880 (119896) = 119870119883119900(119896)
(4)
where 119871 denotes the observer gain and 119883119900(119896) denotes the
estimate of119883119900(119896) at the decoder Here define
119863 (119896) = 119883 (119896) minus 119883119900(119896) (5)
Then it follows from (4) that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896) + 119871119862119863 (119896) (6)
By summing (1) and (6) obtain that
119863 (119896 + 1) = (119860 minus 119871119862)119863 (119896) + 119865119882 (119896) (7)
Here assume that there exists an observer gain 119871 such that alleigenvalues of 119860 minus 119871119862 lie inside the unit circle Then it holdsthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)] lt
1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882 (8)
In the literature many works were concerned withnetworked control over dropout channels or the channelswith time delays and presented many important resultsDifferently from the existing results this paper considersthe case where the sensors and the controller are connectedvia errorless digital communication channels without timedelays and focuses on the tradeoff between the LQ cost andthe data rate of the channel Furthermore assume that thechannel is memoryless Then the encoder and the decoderhave access to the control actions Considering this caseavoids extraneous complexity It makes our conclusions mosttransparent
Mathematical Problems in Engineering 3
This paper considers the MIMO system (1) under data-rate limitations and presents a quantization coding andcontrol scheme to stabilize the system (1) in the mean squaresense
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt infin (9)
Furthermore LQG control problems are also further dis-cussed under data-rate limitations and the role that com-munication has on the classical LQG control problem isexplicitly examined The main task here is to present anexplicit expression on the tradeoff between the LQ cost andthe data rate
3 LQG Control for MIMO Systems underData-Rate Limitations
This section considers the partially-observed unstable lineartime-invariant plant discusses the LQG control problemunder data-rate limitations derives the sufficient conditionon the data rate for stabilization and presents the relationshipbetween the control performance and the data rate
In order to achieve the minimum data rate for stabi-lization the existing bit-allocation scheme needs to finda real transformation matrix which can diagonalize thesystem matrix such that it can regulate the transmissionof information on the basis of the eigenvalues In manyapplications however there exists no transformation matrixthat can diagonalize any systemmatrix Furthermore puttingthe system matrix into Jordan canonical form often requiresa complex transformation matrix To solve the problem abit-allocation scheme on the basis of the singular valuesof system matrix and an adaptive differential quantization-coding scheme are employed in this paper
Notice that there must exist a real orthogonal matrix119867 isin
119877119899times119899 that diagonalizes
1198601015840
119860 = 1198671015840
Λ2
119867 (10)
where we define Λ = diag[1205901 120590
119899] Clearly 120590
119894is the
119894th singular value of 119860 (119894 = 1 2 119899) Here define theprediction value of119883
119900(119896) by
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1) (11)
Furthermore define
119883119900(119896) = 119867119883
119900(119896)
119883119900(119896) = 119867119883
119900(119896)
119900(119896) = 119867
119900(119896)
119885 (119896) = 119883119900(119896) minus
119900(119896)
(12)
Since the encoder and the decoder have access to theprevious control actions update their estimator and obtainthe same prediction value only 119885(119896) needs to be quantizedencoded and transmitted to the decoder Let 119885(119896) and 119881(119896)
denote the quantization value and quantization error of119885(119896)respectively Then it follows that
119885 (119896) = 119885 (119896) + 119881 (119896) (13)
Thus the estimate of119883119900(119896) is given by
119883119900(119896) = 119867
1015840
(119900(119896) + 119885 (119896)) (14)
Similar to that in [5] the quantization scheme is pre-sented Let 119885(119905) = [119911
1(119905) 119911
2(119905) sdot sdot sdot 119911
119899(119905)]1015840 Given a
positive integer119872119894and a nonnegative real number Δ
119894(119905) (119894 =
1 119899) define the quantizer 119902 119877 rarr 119885 with sensitivityΔ119894(119905) and saturation value119872
119894by the formula
119902 (119911119894(119905))
=
119872+
if 119911119894(119905) gt (119872
119894+
1
2)Δ119894(119905)
119872minus
if 119911119894(119905) le minus (119872
119894+
1
2)Δ119894(119905)
lfloor119911119894(119905)
Δ119894(119905)
+1
2rfloor if minus (119872
119894+
1
2)Δ119894(119905) lt 119911
119894(119905)
119911119894(119905) le (119872
119894+
1
2)Δ119894(119905)
(15)
where we define lfloor119911rfloor = max119896 isin 119885 = 119896 lt 119911 119911 isin 119877The indexes 119872
+ and 119872minus will be employed if the quantizer
saturates The scheme to be used here is based on thehypothesis that it is possible to change the sensitivity (butnot the saturation value) of the quantizer on the basisof available quantized measurements The quantizer maycounteract disturbances by switching repeatedly betweenldquozooming outrdquo and ldquozooming inrdquo
First a lemma from [14] is presented
Lemma 1 Let 119911 isin 119877 denote a Gaussian source and denote anestimate of 119911 Define 119877(119863) as the data rate distortion functionbetween and 119911The distortion constraint is defined as119863 isin 119877
+Let ℎ denote the sampling period Given 119863 ge 119864(119911 minus )
2 theremust exist a quantization and coding scheme if the informationrate 119877 of the channel satisfies
119877 gt1
ℎ119877 (119863) ge
1
2log2
1205902
(119911)
119863(119887119894119905119904119904119886119898119901119897119890) (16)
where one defines 1205902(119911) = 119864(119911 minus 119864119911)2
Proof The proof is given by [14]
In networked control systems with large communicationbandwidth communication and control are often viewed asindependent functions in order to simplify the analysis anddesign of the overall system However in many applicationsdata-rate limitations can introduce large quantization errorsand affect control performances significantly Thus thispaper is concerned with the relationship between the controlperformance and the data rate
Here the LQ cost is quantified by
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)] (17)
4 Mathematical Problems in Engineering
where 119876 isin 119877119899times119899 is symmetric positive definite Here this
paper is concernedwith how small the plant state can bemadeas 119896 rarr infin Then the following result holds
Theorem 2 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle Then thesystem (1) is stabilizable in themean square sense (9) if the datarate of the channel satisfies the following condition
119877 gt 119877min = sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816 (119887119894119905119904119904119886119898119901119897119890) (18)
with Ξ = 119894 isin 1 2 119899 |120590119894| gt 1 If one further assumes
that the magnitudes of all the singular values of system matrix119860 are larger than 1 the system (1) is stabilizable in the meansquare sense (9) if the data rate of the channel satisfies thefollowing condition
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (19)
Furthermore the LQ cost 1198691is obtained by
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(20)
Proof Notice that
119883(119896) = 119883119900(119896) + 119863 (119896) (21)
Then it holds that
119864 [1198831015840
(119896) 119876119883 (119896)] = 119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ 119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2119864 [1198831015840
119900(119896) 119876119863 (119896)]
(22)
Furthermore notice that
119883119900(119896) =
119900(119896) + 119867
1015840
119885 (119896) (23)
Then it follows that
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
= 119864 [( (119896) + 1198671015840
119885 (119896))1015840
119876( (119896) + 1198671015840
119885 (119896))]
= 119864 [1015840
119900(119896) 119876
119900(119896)] + 119864 [119885
1015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
(24)
Thus it follows that
119864 [1198831015840
(119896) 119876119883 (119896)]
= 119864 [1015840
119900(119896) 119876
119900(119896)] + 119864 [119885
1015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2119864 [119900(119896)119867119876119867
1015840
119885 (119896)] + 119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2119864 [1198831015840
119900(119896) 119876119863 (119896)]
(25)
Namely it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
(26)
Clearly it needs to compute all the terms in the equationabove
It follows from (4) and (6) that
119883119900(119896 + 1)
= 119860119883119900(119896) + 119861119870119883
119900(119896) + 119871119862119863 (119896)
= 119860 (119883119900(119896) minus 119883
119900(119896)) + (119860 + 119861119870)119883
119900(119896) + 119871119862119863 (119896)
= 1198601198671015840
119881 (119896) + 119900(119896 + 1) + 119871119862119863 (119896)
(27)
Mathematical Problems in Engineering 5
Namely it holds that
119885 (119896 + 1) = 1198671198601198671015840
119881 (119896) + 119867119871119862119863 (119896) (28)
Notice that119881(119896) and119863(119896) are mutually independent randomvariables Let119883 denote a vector Then define
Σ119883
= 119864 [1198831198831015840
] (29)
Then it follows that
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= tr (1198671198761198671015840
Λ2
Σ119881(119896)
) + 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(30)
Since 119885(119896) is unknown for the decoder it will be quantizedencoded and transmitted via a digital communication chan-nel with limited data rates If there exists a quantizationcoding scheme such that the following condition holds
119864 [1199112
119894(119896)] gt 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (31)
which is equivalent to
1205762
119864 [1199112
119894(119896)] = 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (32)
with 120576 isin (0 1) it holds that
1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] = tr (1198671198761198671015840
Λ2
Σ119881(119896)
) (33)
Substitute the equality above into (30) and obtain
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(34)
It means that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)]
lt1
1 minus 1205762lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(35)
Clearly the condition (31) must hold if the number of bitsneeded to the quantization value is large enough Let 119863
119894(119896)
denote the expected distortion constraint corresponding to119911119894(119896) at time 119896 Thus set
119863119894(119896) =
1205762
1205902
119894
119864 [1199112
119894(119896)] when 1003816100381610038161003816120590119894
1003816100381610038161003816 ge 1
0 when 10038161003816100381610038161205901198941003816100381610038161003816 lt 1
(36)
Then it follows from Lemma 1 that the data rate of thechannel is given by
119877 =1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
119863119894(119896)
=1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
(12057621205902
119894) 119864 [1199112
119894(119896)]
= sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816
120576(bitssample)
(37)
where we define Ξ = 119894 isin 1 2 119899 |120590119894| gt 1 A lower
bound on the data rate which ensures the condition (31) holdsis given by
119877min = sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816 (bitssample) (38)
If we assume that themagnitudes of all the singular valuesof system matrix 119860 are larger than 1 the data rate of thechannel is given by
119877 = log2
|119860|
120576119899(bitssample) (39)
and the lower bound on the data rate is given by
119877min = log2|119860| (bitssample) (40)
It may be also obtained that
120576 =119899
radic|119860|
2119877 (41)
Furthermore it follows from (6) that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119870119883
119900(119896) + 119871119862119863 (119896)
= (119860 + 119861119870)119883119900(119896) minus 119861119870119867
1015840
119881 (119896) + 119871119862119863 (119896)
(42)
By summing the equality above and (7) it follows that
119864 [1198831015840
119900(119896 + 1)119876119863 (119896 + 1)]
= 119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876 (119860 minus 119871119862)119863 (119896)]
+ 119864 [1198631015840
(119896) (119860 minus 119871119862)1015840
119876119871119862119863 (119896)]
(43)
6 Mathematical Problems in Engineering
Thus it follows that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(44)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876119871119862119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(45)
It follows from (31) that
1205762
[119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)]
= [119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
119864 [V2119894(119896)]
(46)
where [sdot]119894119895denotes an element of a matrix (119894 119895 = 1 2 119899)
This implies that
1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
(47)
Furthermore it follows from (28) that
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(48)
Substitute (47) into the equality above and obtain
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(49)
Then get
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(50)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(51)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
119876 (119860 + 119861119870)1198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(52)
Furthermore notice that
119900(119896) = 119867 (119860 + 119861119870) (119883
119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
119885 (119896) = 1198671198601198671015840
119881 (119896 minus 1) + 119867119871119862119863 (119896 minus 1)
(53)
Then it follows that
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
= 119864 [(119883119900(119896 minus 1) minus 119867
1015840
)1015840
(119860 + 119861119870)1015840
119876
times (1198601198671015840
119881 (119896 minus 1) + 119871119862119863 (119896 minus 1)) ]
= 119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
119876119871119862119863 (119896 minus 1)]
minus 119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896 minus 1)]
(54)
Substitute (45) and (51) into the previous equality and obtain
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
+
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(55)
Mathematical Problems in Engineering 7
Furthermore notice that
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1)
= (119860 + 119861119870) (119883119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
(56)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
times 119876 (119860 + 119861119870)119883119900(119896 minus 1) ]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896 minus 1)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896)]
(57)
Substitute (52) into the inequality above and obtain that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(58)
By summing (8) (26) (35) (41) (44) (55) and (58) obtainthat
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(59)
Now further consider the case with 119876 = 119868 where 119868
denotes an identity matrix Then the equality above mayreduce to
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
10038171003817100381710038171003817(119860 + 119861119870)119860
minus1
11987111986211986510038171003817100381710038171003817
2
+ 1198711198621198652
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119860minus1
11987111986211986510038171003817100381710038171003817)
8 Mathematical Problems in Engineering
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
(119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+ 1198652
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(60)
It means that the system (1) is stabilizable in the mean squaresense (9) if the data rate 119877 satisfies the following condition
119877 gt 119877min = log2|119860| (bitssample) (61)
Remark 3 (i) It is shown in Theorem 2 that the system (1) isstill stabilizable in the mean square sense (9) by employing abit-allocation scheme on the basis of not the eigenvalues butthe singular values of the systemmatrix Furthermore underthe special condition our result may reduce to the existingone in [1] and is not more conservative
(ii) No assumption that there exists a real transformationmatrix such that system matrix can be transformed to adiagonal matrix or a Jordan canonical form is made in thispaper Thus the bit-allocation scheme presented here doeswork for more general systems
Now consider the classical LQG control problem forMIMO linear time-invariant systems with data-rate limita-tions and discuss the effect of the data rate on the achievablecontrol performance Namely for a given data rate theproblem here is how to design the quantization codingand control scheme to achieve the optimal LQ cost Theperformance objective to be considered here is the averageinfinite horizon quadratic cost
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)] (62)
where119876 isin 119877119899times119899 and 119878 isin 119877
119898times119898 are symmetric positive definiteand (119860 119876
12
) is observable
Theorem 4 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle and themagnitudes of all the singular values of system matrix 119860 arelarger than 1The data rate of the channel satisfies the followinginequality
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (63)
Then the certainty equivalent control law of the form 119880(119905) =
119870119883119900(119905) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (64)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (65)
is optimal The corresponding optimal LQ cost 1198692is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(66)
Proof Notice that
119883119900(119896 + 1) = 119883
119900(119896 + 1) minus 119867
1015840
119881 (119896 + 1) (67)
Substitute (6) into the equality above and obtain that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896)
+ 119871119862119863 (119896) minus 1198671015840
119881 (119896 + 1)
= 119860119883119900(119896) + 119861119880 (119896) + 119871119862119863 (119896)
+ 1198601198671015840
119881 (119896) minus 1198671015840
119881 (119896 + 1)
(68)
Furthermore notice that
119883 (119896) = 119883119900(119896) + 119863 (119896) = 119883
119900(119896) + 119867
1015840
119881 (119896) + 119863 (119896) (69)
Then Tatikonda et al [7] addressed the classical LQG controlproblem under data-rate limitations and considered the samecase The optimal LQ cost decomposed into two terms afull knowledge cost and a sequential rate distortion costHowever the second term still depends on the steady stateestimation error covariance This paper further discusses theLQG control problem and presents a full knowledge cost Asstated in [7] the optimal steady state control law is a lineargain of the form 119880(119896) = 119870119883
119900(119896) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (70)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (71)
Mathematical Problems in Engineering 9
The optimal cost is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119905) 119876119883
119900(119905) + 119880
1015840
(119905) 119878119880 (119905)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198601015840
1198751198601198671015840
sum
119881(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198751198671015840
sum
119881(119896+1)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[(119871119862)1015840
119875119871119862sum
119863(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
(72)
Then it needs to compute all the terms in the equation aboveIt follows from (31) that
1205762
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)] = [119867119876119867
1015840
]119894119894
119864 [V2119894(119896)] (73)
Then it holds that
1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
(74)
Furthermore it follows from (30) that
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896 + 1)]
= [1198671198761198671015840
]119894119894
119864 [V2119894(119896)] + [(119871119862)
1015840
119876119871119862]119894119894
119864 [1198892
119894(119896)]
(75)
Then it holds that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(76)
Substitute (74) into the equality above and obtain that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(77)
This implies that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt1
1 minus 12057621198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(78)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(79)
Using the same techniques in the proof above it can beshown that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
lt
12057621003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(80)
10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
This paper considers the MIMO system (1) under data-rate limitations and presents a quantization coding andcontrol scheme to stabilize the system (1) in the mean squaresense
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt infin (9)
Furthermore LQG control problems are also further dis-cussed under data-rate limitations and the role that com-munication has on the classical LQG control problem isexplicitly examined The main task here is to present anexplicit expression on the tradeoff between the LQ cost andthe data rate
3 LQG Control for MIMO Systems underData-Rate Limitations
This section considers the partially-observed unstable lineartime-invariant plant discusses the LQG control problemunder data-rate limitations derives the sufficient conditionon the data rate for stabilization and presents the relationshipbetween the control performance and the data rate
In order to achieve the minimum data rate for stabi-lization the existing bit-allocation scheme needs to finda real transformation matrix which can diagonalize thesystem matrix such that it can regulate the transmissionof information on the basis of the eigenvalues In manyapplications however there exists no transformation matrixthat can diagonalize any systemmatrix Furthermore puttingthe system matrix into Jordan canonical form often requiresa complex transformation matrix To solve the problem abit-allocation scheme on the basis of the singular valuesof system matrix and an adaptive differential quantization-coding scheme are employed in this paper
Notice that there must exist a real orthogonal matrix119867 isin
119877119899times119899 that diagonalizes
1198601015840
119860 = 1198671015840
Λ2
119867 (10)
where we define Λ = diag[1205901 120590
119899] Clearly 120590
119894is the
119894th singular value of 119860 (119894 = 1 2 119899) Here define theprediction value of119883
119900(119896) by
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1) (11)
Furthermore define
119883119900(119896) = 119867119883
119900(119896)
119883119900(119896) = 119867119883
119900(119896)
119900(119896) = 119867
119900(119896)
119885 (119896) = 119883119900(119896) minus
119900(119896)
(12)
Since the encoder and the decoder have access to theprevious control actions update their estimator and obtainthe same prediction value only 119885(119896) needs to be quantizedencoded and transmitted to the decoder Let 119885(119896) and 119881(119896)
denote the quantization value and quantization error of119885(119896)respectively Then it follows that
119885 (119896) = 119885 (119896) + 119881 (119896) (13)
Thus the estimate of119883119900(119896) is given by
119883119900(119896) = 119867
1015840
(119900(119896) + 119885 (119896)) (14)
Similar to that in [5] the quantization scheme is pre-sented Let 119885(119905) = [119911
1(119905) 119911
2(119905) sdot sdot sdot 119911
119899(119905)]1015840 Given a
positive integer119872119894and a nonnegative real number Δ
119894(119905) (119894 =
1 119899) define the quantizer 119902 119877 rarr 119885 with sensitivityΔ119894(119905) and saturation value119872
119894by the formula
119902 (119911119894(119905))
=
119872+
if 119911119894(119905) gt (119872
119894+
1
2)Δ119894(119905)
119872minus
if 119911119894(119905) le minus (119872
119894+
1
2)Δ119894(119905)
lfloor119911119894(119905)
Δ119894(119905)
+1
2rfloor if minus (119872
119894+
1
2)Δ119894(119905) lt 119911
119894(119905)
119911119894(119905) le (119872
119894+
1
2)Δ119894(119905)
(15)
where we define lfloor119911rfloor = max119896 isin 119885 = 119896 lt 119911 119911 isin 119877The indexes 119872
+ and 119872minus will be employed if the quantizer
saturates The scheme to be used here is based on thehypothesis that it is possible to change the sensitivity (butnot the saturation value) of the quantizer on the basisof available quantized measurements The quantizer maycounteract disturbances by switching repeatedly betweenldquozooming outrdquo and ldquozooming inrdquo
First a lemma from [14] is presented
Lemma 1 Let 119911 isin 119877 denote a Gaussian source and denote anestimate of 119911 Define 119877(119863) as the data rate distortion functionbetween and 119911The distortion constraint is defined as119863 isin 119877
+Let ℎ denote the sampling period Given 119863 ge 119864(119911 minus )
2 theremust exist a quantization and coding scheme if the informationrate 119877 of the channel satisfies
119877 gt1
ℎ119877 (119863) ge
1
2log2
1205902
(119911)
119863(119887119894119905119904119904119886119898119901119897119890) (16)
where one defines 1205902(119911) = 119864(119911 minus 119864119911)2
Proof The proof is given by [14]
In networked control systems with large communicationbandwidth communication and control are often viewed asindependent functions in order to simplify the analysis anddesign of the overall system However in many applicationsdata-rate limitations can introduce large quantization errorsand affect control performances significantly Thus thispaper is concerned with the relationship between the controlperformance and the data rate
Here the LQ cost is quantified by
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)] (17)
4 Mathematical Problems in Engineering
where 119876 isin 119877119899times119899 is symmetric positive definite Here this
paper is concernedwith how small the plant state can bemadeas 119896 rarr infin Then the following result holds
Theorem 2 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle Then thesystem (1) is stabilizable in themean square sense (9) if the datarate of the channel satisfies the following condition
119877 gt 119877min = sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816 (119887119894119905119904119904119886119898119901119897119890) (18)
with Ξ = 119894 isin 1 2 119899 |120590119894| gt 1 If one further assumes
that the magnitudes of all the singular values of system matrix119860 are larger than 1 the system (1) is stabilizable in the meansquare sense (9) if the data rate of the channel satisfies thefollowing condition
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (19)
Furthermore the LQ cost 1198691is obtained by
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(20)
Proof Notice that
119883(119896) = 119883119900(119896) + 119863 (119896) (21)
Then it holds that
119864 [1198831015840
(119896) 119876119883 (119896)] = 119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ 119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2119864 [1198831015840
119900(119896) 119876119863 (119896)]
(22)
Furthermore notice that
119883119900(119896) =
119900(119896) + 119867
1015840
119885 (119896) (23)
Then it follows that
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
= 119864 [( (119896) + 1198671015840
119885 (119896))1015840
119876( (119896) + 1198671015840
119885 (119896))]
= 119864 [1015840
119900(119896) 119876
119900(119896)] + 119864 [119885
1015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
(24)
Thus it follows that
119864 [1198831015840
(119896) 119876119883 (119896)]
= 119864 [1015840
119900(119896) 119876
119900(119896)] + 119864 [119885
1015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2119864 [119900(119896)119867119876119867
1015840
119885 (119896)] + 119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2119864 [1198831015840
119900(119896) 119876119863 (119896)]
(25)
Namely it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
(26)
Clearly it needs to compute all the terms in the equationabove
It follows from (4) and (6) that
119883119900(119896 + 1)
= 119860119883119900(119896) + 119861119870119883
119900(119896) + 119871119862119863 (119896)
= 119860 (119883119900(119896) minus 119883
119900(119896)) + (119860 + 119861119870)119883
119900(119896) + 119871119862119863 (119896)
= 1198601198671015840
119881 (119896) + 119900(119896 + 1) + 119871119862119863 (119896)
(27)
Mathematical Problems in Engineering 5
Namely it holds that
119885 (119896 + 1) = 1198671198601198671015840
119881 (119896) + 119867119871119862119863 (119896) (28)
Notice that119881(119896) and119863(119896) are mutually independent randomvariables Let119883 denote a vector Then define
Σ119883
= 119864 [1198831198831015840
] (29)
Then it follows that
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= tr (1198671198761198671015840
Λ2
Σ119881(119896)
) + 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(30)
Since 119885(119896) is unknown for the decoder it will be quantizedencoded and transmitted via a digital communication chan-nel with limited data rates If there exists a quantizationcoding scheme such that the following condition holds
119864 [1199112
119894(119896)] gt 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (31)
which is equivalent to
1205762
119864 [1199112
119894(119896)] = 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (32)
with 120576 isin (0 1) it holds that
1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] = tr (1198671198761198671015840
Λ2
Σ119881(119896)
) (33)
Substitute the equality above into (30) and obtain
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(34)
It means that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)]
lt1
1 minus 1205762lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(35)
Clearly the condition (31) must hold if the number of bitsneeded to the quantization value is large enough Let 119863
119894(119896)
denote the expected distortion constraint corresponding to119911119894(119896) at time 119896 Thus set
119863119894(119896) =
1205762
1205902
119894
119864 [1199112
119894(119896)] when 1003816100381610038161003816120590119894
1003816100381610038161003816 ge 1
0 when 10038161003816100381610038161205901198941003816100381610038161003816 lt 1
(36)
Then it follows from Lemma 1 that the data rate of thechannel is given by
119877 =1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
119863119894(119896)
=1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
(12057621205902
119894) 119864 [1199112
119894(119896)]
= sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816
120576(bitssample)
(37)
where we define Ξ = 119894 isin 1 2 119899 |120590119894| gt 1 A lower
bound on the data rate which ensures the condition (31) holdsis given by
119877min = sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816 (bitssample) (38)
If we assume that themagnitudes of all the singular valuesof system matrix 119860 are larger than 1 the data rate of thechannel is given by
119877 = log2
|119860|
120576119899(bitssample) (39)
and the lower bound on the data rate is given by
119877min = log2|119860| (bitssample) (40)
It may be also obtained that
120576 =119899
radic|119860|
2119877 (41)
Furthermore it follows from (6) that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119870119883
119900(119896) + 119871119862119863 (119896)
= (119860 + 119861119870)119883119900(119896) minus 119861119870119867
1015840
119881 (119896) + 119871119862119863 (119896)
(42)
By summing the equality above and (7) it follows that
119864 [1198831015840
119900(119896 + 1)119876119863 (119896 + 1)]
= 119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876 (119860 minus 119871119862)119863 (119896)]
+ 119864 [1198631015840
(119896) (119860 minus 119871119862)1015840
119876119871119862119863 (119896)]
(43)
6 Mathematical Problems in Engineering
Thus it follows that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(44)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876119871119862119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(45)
It follows from (31) that
1205762
[119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)]
= [119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
119864 [V2119894(119896)]
(46)
where [sdot]119894119895denotes an element of a matrix (119894 119895 = 1 2 119899)
This implies that
1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
(47)
Furthermore it follows from (28) that
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(48)
Substitute (47) into the equality above and obtain
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(49)
Then get
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(50)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(51)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
119876 (119860 + 119861119870)1198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(52)
Furthermore notice that
119900(119896) = 119867 (119860 + 119861119870) (119883
119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
119885 (119896) = 1198671198601198671015840
119881 (119896 minus 1) + 119867119871119862119863 (119896 minus 1)
(53)
Then it follows that
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
= 119864 [(119883119900(119896 minus 1) minus 119867
1015840
)1015840
(119860 + 119861119870)1015840
119876
times (1198601198671015840
119881 (119896 minus 1) + 119871119862119863 (119896 minus 1)) ]
= 119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
119876119871119862119863 (119896 minus 1)]
minus 119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896 minus 1)]
(54)
Substitute (45) and (51) into the previous equality and obtain
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
+
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(55)
Mathematical Problems in Engineering 7
Furthermore notice that
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1)
= (119860 + 119861119870) (119883119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
(56)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
times 119876 (119860 + 119861119870)119883119900(119896 minus 1) ]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896 minus 1)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896)]
(57)
Substitute (52) into the inequality above and obtain that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(58)
By summing (8) (26) (35) (41) (44) (55) and (58) obtainthat
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(59)
Now further consider the case with 119876 = 119868 where 119868
denotes an identity matrix Then the equality above mayreduce to
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
10038171003817100381710038171003817(119860 + 119861119870)119860
minus1
11987111986211986510038171003817100381710038171003817
2
+ 1198711198621198652
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119860minus1
11987111986211986510038171003817100381710038171003817)
8 Mathematical Problems in Engineering
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
(119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+ 1198652
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(60)
It means that the system (1) is stabilizable in the mean squaresense (9) if the data rate 119877 satisfies the following condition
119877 gt 119877min = log2|119860| (bitssample) (61)
Remark 3 (i) It is shown in Theorem 2 that the system (1) isstill stabilizable in the mean square sense (9) by employing abit-allocation scheme on the basis of not the eigenvalues butthe singular values of the systemmatrix Furthermore underthe special condition our result may reduce to the existingone in [1] and is not more conservative
(ii) No assumption that there exists a real transformationmatrix such that system matrix can be transformed to adiagonal matrix or a Jordan canonical form is made in thispaper Thus the bit-allocation scheme presented here doeswork for more general systems
Now consider the classical LQG control problem forMIMO linear time-invariant systems with data-rate limita-tions and discuss the effect of the data rate on the achievablecontrol performance Namely for a given data rate theproblem here is how to design the quantization codingand control scheme to achieve the optimal LQ cost Theperformance objective to be considered here is the averageinfinite horizon quadratic cost
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)] (62)
where119876 isin 119877119899times119899 and 119878 isin 119877
119898times119898 are symmetric positive definiteand (119860 119876
12
) is observable
Theorem 4 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle and themagnitudes of all the singular values of system matrix 119860 arelarger than 1The data rate of the channel satisfies the followinginequality
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (63)
Then the certainty equivalent control law of the form 119880(119905) =
119870119883119900(119905) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (64)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (65)
is optimal The corresponding optimal LQ cost 1198692is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(66)
Proof Notice that
119883119900(119896 + 1) = 119883
119900(119896 + 1) minus 119867
1015840
119881 (119896 + 1) (67)
Substitute (6) into the equality above and obtain that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896)
+ 119871119862119863 (119896) minus 1198671015840
119881 (119896 + 1)
= 119860119883119900(119896) + 119861119880 (119896) + 119871119862119863 (119896)
+ 1198601198671015840
119881 (119896) minus 1198671015840
119881 (119896 + 1)
(68)
Furthermore notice that
119883 (119896) = 119883119900(119896) + 119863 (119896) = 119883
119900(119896) + 119867
1015840
119881 (119896) + 119863 (119896) (69)
Then Tatikonda et al [7] addressed the classical LQG controlproblem under data-rate limitations and considered the samecase The optimal LQ cost decomposed into two terms afull knowledge cost and a sequential rate distortion costHowever the second term still depends on the steady stateestimation error covariance This paper further discusses theLQG control problem and presents a full knowledge cost Asstated in [7] the optimal steady state control law is a lineargain of the form 119880(119896) = 119870119883
119900(119896) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (70)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (71)
Mathematical Problems in Engineering 9
The optimal cost is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119905) 119876119883
119900(119905) + 119880
1015840
(119905) 119878119880 (119905)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198601015840
1198751198601198671015840
sum
119881(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198751198671015840
sum
119881(119896+1)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[(119871119862)1015840
119875119871119862sum
119863(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
(72)
Then it needs to compute all the terms in the equation aboveIt follows from (31) that
1205762
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)] = [119867119876119867
1015840
]119894119894
119864 [V2119894(119896)] (73)
Then it holds that
1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
(74)
Furthermore it follows from (30) that
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896 + 1)]
= [1198671198761198671015840
]119894119894
119864 [V2119894(119896)] + [(119871119862)
1015840
119876119871119862]119894119894
119864 [1198892
119894(119896)]
(75)
Then it holds that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(76)
Substitute (74) into the equality above and obtain that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(77)
This implies that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt1
1 minus 12057621198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(78)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(79)
Using the same techniques in the proof above it can beshown that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
lt
12057621003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(80)
10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
where 119876 isin 119877119899times119899 is symmetric positive definite Here this
paper is concernedwith how small the plant state can bemadeas 119896 rarr infin Then the following result holds
Theorem 2 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle Then thesystem (1) is stabilizable in themean square sense (9) if the datarate of the channel satisfies the following condition
119877 gt 119877min = sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816 (119887119894119905119904119904119886119898119901119897119890) (18)
with Ξ = 119894 isin 1 2 119899 |120590119894| gt 1 If one further assumes
that the magnitudes of all the singular values of system matrix119860 are larger than 1 the system (1) is stabilizable in the meansquare sense (9) if the data rate of the channel satisfies thefollowing condition
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (19)
Furthermore the LQ cost 1198691is obtained by
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(20)
Proof Notice that
119883(119896) = 119883119900(119896) + 119863 (119896) (21)
Then it holds that
119864 [1198831015840
(119896) 119876119883 (119896)] = 119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ 119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2119864 [1198831015840
119900(119896) 119876119863 (119896)]
(22)
Furthermore notice that
119883119900(119896) =
119900(119896) + 119867
1015840
119885 (119896) (23)
Then it follows that
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
= 119864 [( (119896) + 1198671015840
119885 (119896))1015840
119876( (119896) + 1198671015840
119885 (119896))]
= 119864 [1015840
119900(119896) 119876
119900(119896)] + 119864 [119885
1015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
(24)
Thus it follows that
119864 [1198831015840
(119896) 119876119883 (119896)]
= 119864 [1015840
119900(119896) 119876
119900(119896)] + 119864 [119885
1015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2119864 [119900(119896)119867119876119867
1015840
119885 (119896)] + 119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2119864 [1198831015840
119900(119896) 119876119863 (119896)]
(25)
Namely it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)]
+ 2lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
+ 2lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
(26)
Clearly it needs to compute all the terms in the equationabove
It follows from (4) and (6) that
119883119900(119896 + 1)
= 119860119883119900(119896) + 119861119870119883
119900(119896) + 119871119862119863 (119896)
= 119860 (119883119900(119896) minus 119883
119900(119896)) + (119860 + 119861119870)119883
119900(119896) + 119871119862119863 (119896)
= 1198601198671015840
119881 (119896) + 119900(119896 + 1) + 119871119862119863 (119896)
(27)
Mathematical Problems in Engineering 5
Namely it holds that
119885 (119896 + 1) = 1198671198601198671015840
119881 (119896) + 119867119871119862119863 (119896) (28)
Notice that119881(119896) and119863(119896) are mutually independent randomvariables Let119883 denote a vector Then define
Σ119883
= 119864 [1198831198831015840
] (29)
Then it follows that
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= tr (1198671198761198671015840
Λ2
Σ119881(119896)
) + 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(30)
Since 119885(119896) is unknown for the decoder it will be quantizedencoded and transmitted via a digital communication chan-nel with limited data rates If there exists a quantizationcoding scheme such that the following condition holds
119864 [1199112
119894(119896)] gt 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (31)
which is equivalent to
1205762
119864 [1199112
119894(119896)] = 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (32)
with 120576 isin (0 1) it holds that
1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] = tr (1198671198761198671015840
Λ2
Σ119881(119896)
) (33)
Substitute the equality above into (30) and obtain
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(34)
It means that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)]
lt1
1 minus 1205762lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(35)
Clearly the condition (31) must hold if the number of bitsneeded to the quantization value is large enough Let 119863
119894(119896)
denote the expected distortion constraint corresponding to119911119894(119896) at time 119896 Thus set
119863119894(119896) =
1205762
1205902
119894
119864 [1199112
119894(119896)] when 1003816100381610038161003816120590119894
1003816100381610038161003816 ge 1
0 when 10038161003816100381610038161205901198941003816100381610038161003816 lt 1
(36)
Then it follows from Lemma 1 that the data rate of thechannel is given by
119877 =1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
119863119894(119896)
=1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
(12057621205902
119894) 119864 [1199112
119894(119896)]
= sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816
120576(bitssample)
(37)
where we define Ξ = 119894 isin 1 2 119899 |120590119894| gt 1 A lower
bound on the data rate which ensures the condition (31) holdsis given by
119877min = sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816 (bitssample) (38)
If we assume that themagnitudes of all the singular valuesof system matrix 119860 are larger than 1 the data rate of thechannel is given by
119877 = log2
|119860|
120576119899(bitssample) (39)
and the lower bound on the data rate is given by
119877min = log2|119860| (bitssample) (40)
It may be also obtained that
120576 =119899
radic|119860|
2119877 (41)
Furthermore it follows from (6) that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119870119883
119900(119896) + 119871119862119863 (119896)
= (119860 + 119861119870)119883119900(119896) minus 119861119870119867
1015840
119881 (119896) + 119871119862119863 (119896)
(42)
By summing the equality above and (7) it follows that
119864 [1198831015840
119900(119896 + 1)119876119863 (119896 + 1)]
= 119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876 (119860 minus 119871119862)119863 (119896)]
+ 119864 [1198631015840
(119896) (119860 minus 119871119862)1015840
119876119871119862119863 (119896)]
(43)
6 Mathematical Problems in Engineering
Thus it follows that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(44)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876119871119862119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(45)
It follows from (31) that
1205762
[119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)]
= [119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
119864 [V2119894(119896)]
(46)
where [sdot]119894119895denotes an element of a matrix (119894 119895 = 1 2 119899)
This implies that
1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
(47)
Furthermore it follows from (28) that
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(48)
Substitute (47) into the equality above and obtain
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(49)
Then get
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(50)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(51)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
119876 (119860 + 119861119870)1198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(52)
Furthermore notice that
119900(119896) = 119867 (119860 + 119861119870) (119883
119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
119885 (119896) = 1198671198601198671015840
119881 (119896 minus 1) + 119867119871119862119863 (119896 minus 1)
(53)
Then it follows that
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
= 119864 [(119883119900(119896 minus 1) minus 119867
1015840
)1015840
(119860 + 119861119870)1015840
119876
times (1198601198671015840
119881 (119896 minus 1) + 119871119862119863 (119896 minus 1)) ]
= 119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
119876119871119862119863 (119896 minus 1)]
minus 119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896 minus 1)]
(54)
Substitute (45) and (51) into the previous equality and obtain
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
+
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(55)
Mathematical Problems in Engineering 7
Furthermore notice that
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1)
= (119860 + 119861119870) (119883119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
(56)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
times 119876 (119860 + 119861119870)119883119900(119896 minus 1) ]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896 minus 1)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896)]
(57)
Substitute (52) into the inequality above and obtain that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(58)
By summing (8) (26) (35) (41) (44) (55) and (58) obtainthat
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(59)
Now further consider the case with 119876 = 119868 where 119868
denotes an identity matrix Then the equality above mayreduce to
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
10038171003817100381710038171003817(119860 + 119861119870)119860
minus1
11987111986211986510038171003817100381710038171003817
2
+ 1198711198621198652
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119860minus1
11987111986211986510038171003817100381710038171003817)
8 Mathematical Problems in Engineering
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
(119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+ 1198652
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(60)
It means that the system (1) is stabilizable in the mean squaresense (9) if the data rate 119877 satisfies the following condition
119877 gt 119877min = log2|119860| (bitssample) (61)
Remark 3 (i) It is shown in Theorem 2 that the system (1) isstill stabilizable in the mean square sense (9) by employing abit-allocation scheme on the basis of not the eigenvalues butthe singular values of the systemmatrix Furthermore underthe special condition our result may reduce to the existingone in [1] and is not more conservative
(ii) No assumption that there exists a real transformationmatrix such that system matrix can be transformed to adiagonal matrix or a Jordan canonical form is made in thispaper Thus the bit-allocation scheme presented here doeswork for more general systems
Now consider the classical LQG control problem forMIMO linear time-invariant systems with data-rate limita-tions and discuss the effect of the data rate on the achievablecontrol performance Namely for a given data rate theproblem here is how to design the quantization codingand control scheme to achieve the optimal LQ cost Theperformance objective to be considered here is the averageinfinite horizon quadratic cost
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)] (62)
where119876 isin 119877119899times119899 and 119878 isin 119877
119898times119898 are symmetric positive definiteand (119860 119876
12
) is observable
Theorem 4 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle and themagnitudes of all the singular values of system matrix 119860 arelarger than 1The data rate of the channel satisfies the followinginequality
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (63)
Then the certainty equivalent control law of the form 119880(119905) =
119870119883119900(119905) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (64)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (65)
is optimal The corresponding optimal LQ cost 1198692is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(66)
Proof Notice that
119883119900(119896 + 1) = 119883
119900(119896 + 1) minus 119867
1015840
119881 (119896 + 1) (67)
Substitute (6) into the equality above and obtain that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896)
+ 119871119862119863 (119896) minus 1198671015840
119881 (119896 + 1)
= 119860119883119900(119896) + 119861119880 (119896) + 119871119862119863 (119896)
+ 1198601198671015840
119881 (119896) minus 1198671015840
119881 (119896 + 1)
(68)
Furthermore notice that
119883 (119896) = 119883119900(119896) + 119863 (119896) = 119883
119900(119896) + 119867
1015840
119881 (119896) + 119863 (119896) (69)
Then Tatikonda et al [7] addressed the classical LQG controlproblem under data-rate limitations and considered the samecase The optimal LQ cost decomposed into two terms afull knowledge cost and a sequential rate distortion costHowever the second term still depends on the steady stateestimation error covariance This paper further discusses theLQG control problem and presents a full knowledge cost Asstated in [7] the optimal steady state control law is a lineargain of the form 119880(119896) = 119870119883
119900(119896) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (70)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (71)
Mathematical Problems in Engineering 9
The optimal cost is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119905) 119876119883
119900(119905) + 119880
1015840
(119905) 119878119880 (119905)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198601015840
1198751198601198671015840
sum
119881(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198751198671015840
sum
119881(119896+1)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[(119871119862)1015840
119875119871119862sum
119863(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
(72)
Then it needs to compute all the terms in the equation aboveIt follows from (31) that
1205762
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)] = [119867119876119867
1015840
]119894119894
119864 [V2119894(119896)] (73)
Then it holds that
1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
(74)
Furthermore it follows from (30) that
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896 + 1)]
= [1198671198761198671015840
]119894119894
119864 [V2119894(119896)] + [(119871119862)
1015840
119876119871119862]119894119894
119864 [1198892
119894(119896)]
(75)
Then it holds that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(76)
Substitute (74) into the equality above and obtain that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(77)
This implies that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt1
1 minus 12057621198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(78)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(79)
Using the same techniques in the proof above it can beshown that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
lt
12057621003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(80)
10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Namely it holds that
119885 (119896 + 1) = 1198671198601198671015840
119881 (119896) + 119867119871119862119863 (119896) (28)
Notice that119881(119896) and119863(119896) are mutually independent randomvariables Let119883 denote a vector Then define
Σ119883
= 119864 [1198831198831015840
] (29)
Then it follows that
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= tr (1198671198761198671015840
Λ2
Σ119881(119896)
) + 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(30)
Since 119885(119896) is unknown for the decoder it will be quantizedencoded and transmitted via a digital communication chan-nel with limited data rates If there exists a quantizationcoding scheme such that the following condition holds
119864 [1199112
119894(119896)] gt 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (31)
which is equivalent to
1205762
119864 [1199112
119894(119896)] = 120590
2
119894119864 [V2119894(119896)] (119894 = 1 2 119899) (32)
with 120576 isin (0 1) it holds that
1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] = tr (1198671198761198671015840
Λ2
Σ119881(119896)
) (33)
Substitute the equality above into (30) and obtain
119864 [1198851015840
(119896 + 1)1198671198761198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(34)
It means that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)1198671198761198671015840
119885 (119896)]
lt1
1 minus 1205762lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(35)
Clearly the condition (31) must hold if the number of bitsneeded to the quantization value is large enough Let 119863
119894(119896)
denote the expected distortion constraint corresponding to119911119894(119896) at time 119896 Thus set
119863119894(119896) =
1205762
1205902
119894
119864 [1199112
119894(119896)] when 1003816100381610038161003816120590119894
1003816100381610038161003816 ge 1
0 when 10038161003816100381610038161205901198941003816100381610038161003816 lt 1
(36)
Then it follows from Lemma 1 that the data rate of thechannel is given by
119877 =1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
119863119894(119896)
=1
2sum
119894isinΞ
log2
119864 [1199112
119894(119896)]
(12057621205902
119894) 119864 [1199112
119894(119896)]
= sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816
120576(bitssample)
(37)
where we define Ξ = 119894 isin 1 2 119899 |120590119894| gt 1 A lower
bound on the data rate which ensures the condition (31) holdsis given by
119877min = sum
119894isinΞ
log2
10038161003816100381610038161205901198941003816100381610038161003816 (bitssample) (38)
If we assume that themagnitudes of all the singular valuesof system matrix 119860 are larger than 1 the data rate of thechannel is given by
119877 = log2
|119860|
120576119899(bitssample) (39)
and the lower bound on the data rate is given by
119877min = log2|119860| (bitssample) (40)
It may be also obtained that
120576 =119899
radic|119860|
2119877 (41)
Furthermore it follows from (6) that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119870119883
119900(119896) + 119871119862119863 (119896)
= (119860 + 119861119870)119883119900(119896) minus 119861119870119867
1015840
119881 (119896) + 119871119862119863 (119896)
(42)
By summing the equality above and (7) it follows that
119864 [1198831015840
119900(119896 + 1)119876119863 (119896 + 1)]
= 119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876 (119860 minus 119871119862)119863 (119896)]
+ 119864 [1198631015840
(119896) (119860 minus 119871119862)1015840
119876119871119862119863 (119896)]
(43)
6 Mathematical Problems in Engineering
Thus it follows that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(44)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876119871119862119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(45)
It follows from (31) that
1205762
[119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)]
= [119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
119864 [V2119894(119896)]
(46)
where [sdot]119894119895denotes an element of a matrix (119894 119895 = 1 2 119899)
This implies that
1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
(47)
Furthermore it follows from (28) that
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(48)
Substitute (47) into the equality above and obtain
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(49)
Then get
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(50)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(51)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
119876 (119860 + 119861119870)1198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(52)
Furthermore notice that
119900(119896) = 119867 (119860 + 119861119870) (119883
119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
119885 (119896) = 1198671198601198671015840
119881 (119896 minus 1) + 119867119871119862119863 (119896 minus 1)
(53)
Then it follows that
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
= 119864 [(119883119900(119896 minus 1) minus 119867
1015840
)1015840
(119860 + 119861119870)1015840
119876
times (1198601198671015840
119881 (119896 minus 1) + 119871119862119863 (119896 minus 1)) ]
= 119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
119876119871119862119863 (119896 minus 1)]
minus 119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896 minus 1)]
(54)
Substitute (45) and (51) into the previous equality and obtain
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
+
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(55)
Mathematical Problems in Engineering 7
Furthermore notice that
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1)
= (119860 + 119861119870) (119883119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
(56)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
times 119876 (119860 + 119861119870)119883119900(119896 minus 1) ]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896 minus 1)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896)]
(57)
Substitute (52) into the inequality above and obtain that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(58)
By summing (8) (26) (35) (41) (44) (55) and (58) obtainthat
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(59)
Now further consider the case with 119876 = 119868 where 119868
denotes an identity matrix Then the equality above mayreduce to
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
10038171003817100381710038171003817(119860 + 119861119870)119860
minus1
11987111986211986510038171003817100381710038171003817
2
+ 1198711198621198652
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119860minus1
11987111986211986510038171003817100381710038171003817)
8 Mathematical Problems in Engineering
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
(119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+ 1198652
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(60)
It means that the system (1) is stabilizable in the mean squaresense (9) if the data rate 119877 satisfies the following condition
119877 gt 119877min = log2|119860| (bitssample) (61)
Remark 3 (i) It is shown in Theorem 2 that the system (1) isstill stabilizable in the mean square sense (9) by employing abit-allocation scheme on the basis of not the eigenvalues butthe singular values of the systemmatrix Furthermore underthe special condition our result may reduce to the existingone in [1] and is not more conservative
(ii) No assumption that there exists a real transformationmatrix such that system matrix can be transformed to adiagonal matrix or a Jordan canonical form is made in thispaper Thus the bit-allocation scheme presented here doeswork for more general systems
Now consider the classical LQG control problem forMIMO linear time-invariant systems with data-rate limita-tions and discuss the effect of the data rate on the achievablecontrol performance Namely for a given data rate theproblem here is how to design the quantization codingand control scheme to achieve the optimal LQ cost Theperformance objective to be considered here is the averageinfinite horizon quadratic cost
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)] (62)
where119876 isin 119877119899times119899 and 119878 isin 119877
119898times119898 are symmetric positive definiteand (119860 119876
12
) is observable
Theorem 4 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle and themagnitudes of all the singular values of system matrix 119860 arelarger than 1The data rate of the channel satisfies the followinginequality
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (63)
Then the certainty equivalent control law of the form 119880(119905) =
119870119883119900(119905) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (64)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (65)
is optimal The corresponding optimal LQ cost 1198692is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(66)
Proof Notice that
119883119900(119896 + 1) = 119883
119900(119896 + 1) minus 119867
1015840
119881 (119896 + 1) (67)
Substitute (6) into the equality above and obtain that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896)
+ 119871119862119863 (119896) minus 1198671015840
119881 (119896 + 1)
= 119860119883119900(119896) + 119861119880 (119896) + 119871119862119863 (119896)
+ 1198601198671015840
119881 (119896) minus 1198671015840
119881 (119896 + 1)
(68)
Furthermore notice that
119883 (119896) = 119883119900(119896) + 119863 (119896) = 119883
119900(119896) + 119867
1015840
119881 (119896) + 119863 (119896) (69)
Then Tatikonda et al [7] addressed the classical LQG controlproblem under data-rate limitations and considered the samecase The optimal LQ cost decomposed into two terms afull knowledge cost and a sequential rate distortion costHowever the second term still depends on the steady stateestimation error covariance This paper further discusses theLQG control problem and presents a full knowledge cost Asstated in [7] the optimal steady state control law is a lineargain of the form 119880(119896) = 119870119883
119900(119896) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (70)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (71)
Mathematical Problems in Engineering 9
The optimal cost is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119905) 119876119883
119900(119905) + 119880
1015840
(119905) 119878119880 (119905)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198601015840
1198751198601198671015840
sum
119881(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198751198671015840
sum
119881(119896+1)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[(119871119862)1015840
119875119871119862sum
119863(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
(72)
Then it needs to compute all the terms in the equation aboveIt follows from (31) that
1205762
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)] = [119867119876119867
1015840
]119894119894
119864 [V2119894(119896)] (73)
Then it holds that
1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
(74)
Furthermore it follows from (30) that
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896 + 1)]
= [1198671198761198671015840
]119894119894
119864 [V2119894(119896)] + [(119871119862)
1015840
119876119871119862]119894119894
119864 [1198892
119894(119896)]
(75)
Then it holds that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(76)
Substitute (74) into the equality above and obtain that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(77)
This implies that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt1
1 minus 12057621198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(78)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(79)
Using the same techniques in the proof above it can beshown that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
lt
12057621003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(80)
10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Thus it follows that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(44)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) (119860 + 119861119870)
1015840
119876119871119862119863 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(45)
It follows from (31) that
1205762
[119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)]
= [119867 (119860 + 119861119870)1015840
1198761198601198671015840
]119894119894
119864 [V2119894(119896)]
(46)
where [sdot]119894119895denotes an element of a matrix (119894 119895 = 1 2 119899)
This implies that
1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
(47)
Furthermore it follows from (28) that
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(48)
Substitute (47) into the equality above and obtain
119864 [1198851015840
(119896 + 1)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 119864 [1198631015840
(119896) (119871119862)1015840
119867(119860 + 119861119870)1015840
119876119860minus1
1198671015840
119871119862119863 (119896)]
(49)
Then get
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860 + 119861119870)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(50)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(51)
Using the same techniques in the proof above it can be shownthat
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
119876 (119860 + 119861119870)1198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(52)
Furthermore notice that
119900(119896) = 119867 (119860 + 119861119870) (119883
119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
119885 (119896) = 1198671198601198671015840
119881 (119896 minus 1) + 119867119871119862119863 (119896 minus 1)
(53)
Then it follows that
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
= 119864 [(119883119900(119896 minus 1) minus 119867
1015840
)1015840
(119860 + 119861119870)1015840
119876
times (1198601198671015840
119881 (119896 minus 1) + 119871119862119863 (119896 minus 1)) ]
= 119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
119876119871119862119863 (119896 minus 1)]
minus 119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
1198761198601198671015840
119881 (119896 minus 1)]
(54)
Substitute (45) and (51) into the previous equality and obtain
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [119900(119896)119867119876119867
1015840
119885 (119896)]
lt
1205762100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
+
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817) (1 minus 119860 minus 119871119862
2
)
120601119882
(55)
Mathematical Problems in Engineering 7
Furthermore notice that
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1)
= (119860 + 119861119870) (119883119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
(56)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
times 119876 (119860 + 119861119870)119883119900(119896 minus 1) ]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896 minus 1)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896)]
(57)
Substitute (52) into the inequality above and obtain that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(58)
By summing (8) (26) (35) (41) (44) (55) and (58) obtainthat
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(59)
Now further consider the case with 119876 = 119868 where 119868
denotes an identity matrix Then the equality above mayreduce to
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
10038171003817100381710038171003817(119860 + 119861119870)119860
minus1
11987111986211986510038171003817100381710038171003817
2
+ 1198711198621198652
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119860minus1
11987111986211986510038171003817100381710038171003817)
8 Mathematical Problems in Engineering
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
(119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+ 1198652
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(60)
It means that the system (1) is stabilizable in the mean squaresense (9) if the data rate 119877 satisfies the following condition
119877 gt 119877min = log2|119860| (bitssample) (61)
Remark 3 (i) It is shown in Theorem 2 that the system (1) isstill stabilizable in the mean square sense (9) by employing abit-allocation scheme on the basis of not the eigenvalues butthe singular values of the systemmatrix Furthermore underthe special condition our result may reduce to the existingone in [1] and is not more conservative
(ii) No assumption that there exists a real transformationmatrix such that system matrix can be transformed to adiagonal matrix or a Jordan canonical form is made in thispaper Thus the bit-allocation scheme presented here doeswork for more general systems
Now consider the classical LQG control problem forMIMO linear time-invariant systems with data-rate limita-tions and discuss the effect of the data rate on the achievablecontrol performance Namely for a given data rate theproblem here is how to design the quantization codingand control scheme to achieve the optimal LQ cost Theperformance objective to be considered here is the averageinfinite horizon quadratic cost
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)] (62)
where119876 isin 119877119899times119899 and 119878 isin 119877
119898times119898 are symmetric positive definiteand (119860 119876
12
) is observable
Theorem 4 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle and themagnitudes of all the singular values of system matrix 119860 arelarger than 1The data rate of the channel satisfies the followinginequality
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (63)
Then the certainty equivalent control law of the form 119880(119905) =
119870119883119900(119905) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (64)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (65)
is optimal The corresponding optimal LQ cost 1198692is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(66)
Proof Notice that
119883119900(119896 + 1) = 119883
119900(119896 + 1) minus 119867
1015840
119881 (119896 + 1) (67)
Substitute (6) into the equality above and obtain that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896)
+ 119871119862119863 (119896) minus 1198671015840
119881 (119896 + 1)
= 119860119883119900(119896) + 119861119880 (119896) + 119871119862119863 (119896)
+ 1198601198671015840
119881 (119896) minus 1198671015840
119881 (119896 + 1)
(68)
Furthermore notice that
119883 (119896) = 119883119900(119896) + 119863 (119896) = 119883
119900(119896) + 119867
1015840
119881 (119896) + 119863 (119896) (69)
Then Tatikonda et al [7] addressed the classical LQG controlproblem under data-rate limitations and considered the samecase The optimal LQ cost decomposed into two terms afull knowledge cost and a sequential rate distortion costHowever the second term still depends on the steady stateestimation error covariance This paper further discusses theLQG control problem and presents a full knowledge cost Asstated in [7] the optimal steady state control law is a lineargain of the form 119880(119896) = 119870119883
119900(119896) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (70)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (71)
Mathematical Problems in Engineering 9
The optimal cost is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119905) 119876119883
119900(119905) + 119880
1015840
(119905) 119878119880 (119905)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198601015840
1198751198601198671015840
sum
119881(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198751198671015840
sum
119881(119896+1)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[(119871119862)1015840
119875119871119862sum
119863(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
(72)
Then it needs to compute all the terms in the equation aboveIt follows from (31) that
1205762
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)] = [119867119876119867
1015840
]119894119894
119864 [V2119894(119896)] (73)
Then it holds that
1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
(74)
Furthermore it follows from (30) that
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896 + 1)]
= [1198671198761198671015840
]119894119894
119864 [V2119894(119896)] + [(119871119862)
1015840
119876119871119862]119894119894
119864 [1198892
119894(119896)]
(75)
Then it holds that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(76)
Substitute (74) into the equality above and obtain that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(77)
This implies that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt1
1 minus 12057621198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(78)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(79)
Using the same techniques in the proof above it can beshown that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
lt
12057621003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(80)
10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Furthermore notice that
119900(119896) = (119860 + 119861119870)119883
119900(119896 minus 1)
= (119860 + 119861119870) (119883119900(119896 minus 1) minus 119867
1015840
119881 (119896 minus 1))
(56)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896 minus 1) (119860 + 119861119870)
1015840
times 119876 (119860 + 119861119870)119883119900(119896 minus 1) ]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 minus 1)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896 minus 1)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)119867 (119860 + 119861119870)1015840
times 119876 (119860 + 119861119870)1198671015840
119881 (119896)]
(57)
Substitute (52) into the inequality above and obtain that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1015840
119900(119896) 119876
119900(119896)]
lt 119860 + 1198611198702 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119896) 119876119883
119900(119896)]
+
12057621003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(58)
By summing (8) (26) (35) (41) (44) (55) and (58) obtainthat
1198691= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896)]
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
1003817100381710038171003817100381711987612
(119860 + 119861119870)119860minus1
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
119876 (119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119876119860minus1
11987111986211986510038171003817100381710038171003817)
+1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987611987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(59)
Now further consider the case with 119876 = 119868 where 119868
denotes an identity matrix Then the equality above mayreduce to
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 119883 (119896)2
lt1
1 minus 119860 minus 1198711198622
times
[[[
[
1
(1 minus119899
radic|119860|2
4119877) (1 minus 119860 + 1198611198702
)
times (119899
radic|119860|2
4119877
10038171003817100381710038171003817(119860 + 119861119870)119860
minus1
11987111986211986510038171003817100381710038171003817
2
+ 1198711198621198652
+2119899
radic|119860|2
4119877
100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 + 119861119870)1015840
119860minus1
11987111986211986510038171003817100381710038171003817)
8 Mathematical Problems in Engineering
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
(119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+ 1198652
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(60)
It means that the system (1) is stabilizable in the mean squaresense (9) if the data rate 119877 satisfies the following condition
119877 gt 119877min = log2|119860| (bitssample) (61)
Remark 3 (i) It is shown in Theorem 2 that the system (1) isstill stabilizable in the mean square sense (9) by employing abit-allocation scheme on the basis of not the eigenvalues butthe singular values of the systemmatrix Furthermore underthe special condition our result may reduce to the existingone in [1] and is not more conservative
(ii) No assumption that there exists a real transformationmatrix such that system matrix can be transformed to adiagonal matrix or a Jordan canonical form is made in thispaper Thus the bit-allocation scheme presented here doeswork for more general systems
Now consider the classical LQG control problem forMIMO linear time-invariant systems with data-rate limita-tions and discuss the effect of the data rate on the achievablecontrol performance Namely for a given data rate theproblem here is how to design the quantization codingand control scheme to achieve the optimal LQ cost Theperformance objective to be considered here is the averageinfinite horizon quadratic cost
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)] (62)
where119876 isin 119877119899times119899 and 119878 isin 119877
119898times119898 are symmetric positive definiteand (119860 119876
12
) is observable
Theorem 4 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle and themagnitudes of all the singular values of system matrix 119860 arelarger than 1The data rate of the channel satisfies the followinginequality
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (63)
Then the certainty equivalent control law of the form 119880(119905) =
119870119883119900(119905) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (64)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (65)
is optimal The corresponding optimal LQ cost 1198692is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(66)
Proof Notice that
119883119900(119896 + 1) = 119883
119900(119896 + 1) minus 119867
1015840
119881 (119896 + 1) (67)
Substitute (6) into the equality above and obtain that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896)
+ 119871119862119863 (119896) minus 1198671015840
119881 (119896 + 1)
= 119860119883119900(119896) + 119861119880 (119896) + 119871119862119863 (119896)
+ 1198601198671015840
119881 (119896) minus 1198671015840
119881 (119896 + 1)
(68)
Furthermore notice that
119883 (119896) = 119883119900(119896) + 119863 (119896) = 119883
119900(119896) + 119867
1015840
119881 (119896) + 119863 (119896) (69)
Then Tatikonda et al [7] addressed the classical LQG controlproblem under data-rate limitations and considered the samecase The optimal LQ cost decomposed into two terms afull knowledge cost and a sequential rate distortion costHowever the second term still depends on the steady stateestimation error covariance This paper further discusses theLQG control problem and presents a full knowledge cost Asstated in [7] the optimal steady state control law is a lineargain of the form 119880(119896) = 119870119883
119900(119896) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (70)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (71)
Mathematical Problems in Engineering 9
The optimal cost is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119905) 119876119883
119900(119905) + 119880
1015840
(119905) 119878119880 (119905)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198601015840
1198751198601198671015840
sum
119881(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198751198671015840
sum
119881(119896+1)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[(119871119862)1015840
119875119871119862sum
119863(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
(72)
Then it needs to compute all the terms in the equation aboveIt follows from (31) that
1205762
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)] = [119867119876119867
1015840
]119894119894
119864 [V2119894(119896)] (73)
Then it holds that
1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
(74)
Furthermore it follows from (30) that
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896 + 1)]
= [1198671198761198671015840
]119894119894
119864 [V2119894(119896)] + [(119871119862)
1015840
119876119871119862]119894119894
119864 [1198892
119894(119896)]
(75)
Then it holds that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(76)
Substitute (74) into the equality above and obtain that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(77)
This implies that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt1
1 minus 12057621198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(78)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(79)
Using the same techniques in the proof above it can beshown that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
lt
12057621003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(80)
10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
+
2100381710038171003817100381710038171198651015840
(119871119862)1015840
(119860 minus 119871119862)1015840
(119860 + 119861119870) 11987111986211986510038171003817100381710038171003817
(1 minus 119860 + 1198611198702
) (1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817)
+ 1198652
+
2100381710038171003817100381710038171198651015840
(119860 minus 119871119862)1015840
11987111986211986510038171003817100381710038171003817
1 minus10038171003817100381710038171003817(119860 + 119861119870)
1015840
(119860 minus 119871119862)10038171003817100381710038171003817
]]]
]
120601119882
(60)
It means that the system (1) is stabilizable in the mean squaresense (9) if the data rate 119877 satisfies the following condition
119877 gt 119877min = log2|119860| (bitssample) (61)
Remark 3 (i) It is shown in Theorem 2 that the system (1) isstill stabilizable in the mean square sense (9) by employing abit-allocation scheme on the basis of not the eigenvalues butthe singular values of the systemmatrix Furthermore underthe special condition our result may reduce to the existingone in [1] and is not more conservative
(ii) No assumption that there exists a real transformationmatrix such that system matrix can be transformed to adiagonal matrix or a Jordan canonical form is made in thispaper Thus the bit-allocation scheme presented here doeswork for more general systems
Now consider the classical LQG control problem forMIMO linear time-invariant systems with data-rate limita-tions and discuss the effect of the data rate on the achievablecontrol performance Namely for a given data rate theproblem here is how to design the quantization codingand control scheme to achieve the optimal LQ cost Theperformance objective to be considered here is the averageinfinite horizon quadratic cost
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)] (62)
where119876 isin 119877119899times119899 and 119878 isin 119877
119898times119898 are symmetric positive definiteand (119860 119876
12
) is observable
Theorem 4 Consider the system (1) Assume that all eigenval-ues of 119860 + 119861119870 and 119860 minus 119871119862 lie inside the unit circle and themagnitudes of all the singular values of system matrix 119860 arelarger than 1The data rate of the channel satisfies the followinginequality
119877 gt 119877min = log2|119860| (119887119894119905119904119904119886119898119901119897119890) (63)
Then the certainty equivalent control law of the form 119880(119905) =
119870119883119900(119905) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (64)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (65)
is optimal The corresponding optimal LQ cost 1198692is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(66)
Proof Notice that
119883119900(119896 + 1) = 119883
119900(119896 + 1) minus 119867
1015840
119881 (119896 + 1) (67)
Substitute (6) into the equality above and obtain that
119883119900(119896 + 1) = 119860119883
119900(119896) + 119861119880 (119896)
+ 119871119862119863 (119896) minus 1198671015840
119881 (119896 + 1)
= 119860119883119900(119896) + 119861119880 (119896) + 119871119862119863 (119896)
+ 1198601198671015840
119881 (119896) minus 1198671015840
119881 (119896 + 1)
(68)
Furthermore notice that
119883 (119896) = 119883119900(119896) + 119863 (119896) = 119883
119900(119896) + 119867
1015840
119881 (119896) + 119863 (119896) (69)
Then Tatikonda et al [7] addressed the classical LQG controlproblem under data-rate limitations and considered the samecase The optimal LQ cost decomposed into two terms afull knowledge cost and a sequential rate distortion costHowever the second term still depends on the steady stateestimation error covariance This paper further discusses theLQG control problem and presents a full knowledge cost Asstated in [7] the optimal steady state control law is a lineargain of the form 119880(119896) = 119870119883
119900(119896) where
119870 = minus (1198611015840
119875119861 + 119878)minus1
1198611015840
119875119860 (70)
and 119875 satisfies the Riccati equation
119875 = 1198601015840
(119875 minus 119875119861 (1198611015840
119875119861 + 119878)minus1
1198611015840
119875)119860 + 119876 (71)
Mathematical Problems in Engineering 9
The optimal cost is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119905) 119876119883
119900(119905) + 119880
1015840
(119905) 119878119880 (119905)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198601015840
1198751198601198671015840
sum
119881(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198751198671015840
sum
119881(119896+1)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[(119871119862)1015840
119875119871119862sum
119863(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
(72)
Then it needs to compute all the terms in the equation aboveIt follows from (31) that
1205762
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)] = [119867119876119867
1015840
]119894119894
119864 [V2119894(119896)] (73)
Then it holds that
1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
(74)
Furthermore it follows from (30) that
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896 + 1)]
= [1198671198761198671015840
]119894119894
119864 [V2119894(119896)] + [(119871119862)
1015840
119876119871119862]119894119894
119864 [1198892
119894(119896)]
(75)
Then it holds that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(76)
Substitute (74) into the equality above and obtain that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(77)
This implies that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt1
1 minus 12057621198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(78)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(79)
Using the same techniques in the proof above it can beshown that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
lt
12057621003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(80)
10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
The optimal cost is given by
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
119900(119905) 119876119883
119900(119905) + 119880
1015840
(119905) 119878119880 (119905)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198601015840
1198751198601198671015840
sum
119881(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[1198671198751198671015840
sum
119881(119896+1)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
tr[(119871119862)1015840
119875119871119862sum
119863(119896)
]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
+ lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) 119876119863 (119896)]
(72)
Then it needs to compute all the terms in the equation aboveIt follows from (31) that
1205762
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896)] = [119867119876119867
1015840
]119894119894
119864 [V2119894(119896)] (73)
Then it holds that
1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
(74)
Furthermore it follows from (30) that
[1198671198761198671015840
]119894119894
120590minus2
119894119864 [1199112
119894(119896 + 1)]
= [1198671198761198671015840
]119894119894
119864 [V2119894(119896)] + [(119871119862)
1015840
119876119871119862]119894119894
119864 [1198892
119894(119896)]
(75)
Then it holds that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)] + 1198641003817100381710038171003817100381711987612
119871119862119863(119896)10038171003817100381710038171003817
2
(76)
Substitute (74) into the equality above and obtain that
119864 [1198851015840
(119896 + 1)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896 + 1)]
= 1205762
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
+ 1198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
(77)
This implies that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198851015840
(119896)119867 (119860minus1
)1015840
119876119860minus1
1198671015840
119885 (119896)]
lt1
1 minus 12057621198641003817100381710038171003817100381711987612
119871119862119863 (119896)10038171003817100381710038171003817
2
lt
1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(78)
Thus it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198761198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(79)
Using the same techniques in the proof above it can beshown that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896)1198671198601015840
1198751198601198671015840
119881 (119896)]
lt
12057621003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198811015840
(119896 + 1)1198671198751198671015840
119881 (119896 + 1)]
lt
12057621003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
(1 minus 1205762) (1 minus 119860 minus 1198711198622
)
120601119882
(80)
10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
Furthermore it follows from (7) that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896 + 1) (119871119862)1015840
119875119871119862119863 (119896 + 1)]
lt 119860 minus 1198711198622 lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
120601119882
(81)
Then it holds that
lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198631015840
(119896) (119871119862)1015840
119875119871119862119863 (119896)]
lt
1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
1 minus 119860 minus 1198711198622120601119882
(82)
Substitute (8) (41) (79) (80) and (82) and obtain that
1198692= lim sup119879rarrinfin
1
119879
119879minus1
sum
119896=0
119864 [1198831015840
(119896) 119876119883 (119896) + 1198801015840
(119896) 119878119880 (119896)]
lt1
1 minus 119860 minus 1198711198622
times[[
[
119899
radic|119860|2
22119877119899 minus119899
radic|119860|2
times (1003817100381710038171003817100381711987612
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11986011987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
)
+1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2 ]]
]
120601119882
(83)
Remark 5 (i) This section presents an explicit expression onthe tradeoff between the LQ cost and the data rate Namelyfor the given data rate it is possible to compute the achievableperformance and for the given LQ cost it is also possibleto compute the minimum data rate needed to achieve thecontrol performance
(ii) It also states in Theorem 4 that the larger data ratemay lead to the better control performance However thecontrol performance cannot becomebetterwhen the data rateis large enough For the casewith119877 rarr infin the correspondingoptimal LQ cost 119869
2is given by
lim119877rarrinfin
1198692lt
1
1 minus 119860 minus 1198711198622(1003817100381710038171003817100381711987512
11987111986211986510038171003817100381710038171003817
2
+1003817100381710038171003817100381711987612
11986510038171003817100381710038171003817
2
) 120601119882
(84)
4 Numerical Example
This paper investigates a class of networked control prob-lems which arises in the coordinated motion control of
0 2 4 6 8 10minus6
minus4
minus2
0
2
4
6
8
Time (s)
times104
X1
X2
X3
Figure 2 First let the data rate 119877 = 200 (bitss) which is smallerthan the lower bound on the data rate given by Theorem 4 Aquantization coding control scheme on the basis of such data rateis implemented The corresponding simulation is given in Figure 2It is shown that the system is unstable The system state responseswith 119877 = 200 (bitss)
autonomous and semiautonomous mobile agents for exam-ple unmanned air vehicles (UAVs) unmanned ground vehi-cles (UGVs) and unmanned underwater vehicles (UUVs)and addresses the LQG control under data-rate limitationsTo illustrate the effectiveness of the schemes presented in thispaper this section presents a practical example where threeof the states of an unmanned air vehicle evolve in discrete-time according to
119883(119896 + 1) = [
[
23153 24614 02125
03421 33312 03443
07328 02127 24575
]
]
119883 (119896)
+ [
[
11342 23412
11545 27612
02344 71251
]
]
119880 (119896)
+ [
[
56542
13432
07823
]
]
119882(119896)
119884 (119896) = [37834 18392 28934
16723 18924 37824]119883 (119896)
(85)
Here let the initial position 119883(0) = [5000 minus5000 1000]1015840
and 120601119882
= 50 The control performance will be examined infour cases
Secondly let the data rate 119877 = 400 (bitss) which is largerthan the lower bound on the data rate given by Theorem 4A quantization coding control scheme on the basis of suchdata rate is implemented to stabilize the unstable plant
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
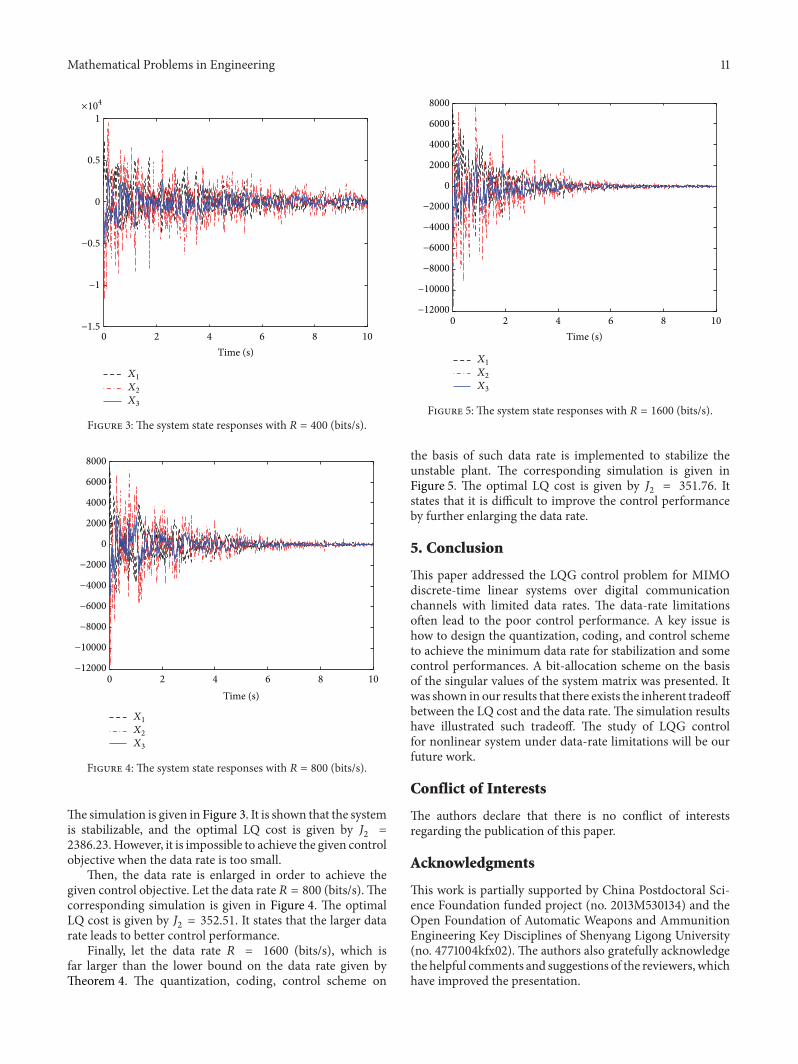
Mathematical Problems in Engineering 11
0 2 4 6 8 10minus15
minus1
minus05
0
05
1
Time (s)
times104
X1
X2
X3
Figure 3 The system state responses with 119877 = 400 (bitss)
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 4 The system state responses with 119877 = 800 (bitss)
The simulation is given in Figure 3 It is shown that the systemis stabilizable and the optimal LQ cost is given by 119869
2=
238623 However it is impossible to achieve the given controlobjective when the data rate is too small
Then the data rate is enlarged in order to achieve thegiven control objective Let the data rate 119877 = 800 (bitss)Thecorresponding simulation is given in Figure 4 The optimalLQ cost is given by 119869
2= 35251 It states that the larger data
rate leads to better control performanceFinally let the data rate 119877 = 1600 (bitss) which is
far larger than the lower bound on the data rate given byTheorem 4 The quantization coding control scheme on
0 2 4 6 8 10minus12000
minus10000
minus8000
minus6000
minus4000
minus2000
0
2000
4000
6000
8000
Time (s)
X1
X2
X3
Figure 5 The system state responses with 119877 = 1600 (bitss)
the basis of such data rate is implemented to stabilize theunstable plant The corresponding simulation is given inFigure 5 The optimal LQ cost is given by 119869
2= 35176 It
states that it is difficult to improve the control performanceby further enlarging the data rate
5 Conclusion
This paper addressed the LQG control problem for MIMOdiscrete-time linear systems over digital communicationchannels with limited data rates The data-rate limitationsoften lead to the poor control performance A key issue ishow to design the quantization coding and control schemeto achieve the minimum data rate for stabilization and somecontrol performances A bit-allocation scheme on the basisof the singular values of the system matrix was presented Itwas shown in our results that there exists the inherent tradeoffbetween the LQ cost and the data rate The simulation resultshave illustrated such tradeoff The study of LQG controlfor nonlinear system under data-rate limitations will be ourfuture work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by China Postdoctoral Sci-ence Foundation funded project (no 2013M530134) and theOpen Foundation of Automatic Weapons and AmmunitionEngineering Key Disciplines of Shenyang Ligong University(no 4771004kfx02) The authors also gratefully acknowledgethe helpful comments and suggestions of the reviewers whichhave improved the presentation
12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
References
[1] J Baillieul and P Antsaklis ldquoControl and communicationchallenges in networked real-time systemsrdquo Proceedings of theIEEE vol 95 no 1 pp 9ndash28 2007
[2] G N Nair F Fagnani S Zampieri and R J Evans ldquoFeedbackcontrol under data rate constraints an overviewrdquo Proceedings ofthe IEEE vol 95 no 1 pp 108ndash137 2007
[3] J Baillieul ldquoFeedback designs in information based controlrdquo inStochastic Theory and Control Proceedings of a Workshop Heldin Lawrence Kansas B Pasik-Duncan Ed pp 35ndash57 SpringerNew York NY USA 2001
[4] G N Nair and R J Evans ldquoStabilizability of stochastic linearsystems with finite feedback data ratesrdquo SIAM Journal onControl and Optimization vol 43 no 2 pp 413ndash436 2004
[5] R W Brockett and D Liberzon ldquoQuantized feedback stabiliza-tion of linear systemsrdquo IEEE Transactions on Automatic Controlvol 45 no 7 pp 1279ndash1289 2000
[6] V Borkar and S K Mitter ldquoLQG control with communicationconstraintsrdquo in Communications Computation Control andSignal Processing A Tribute to Thomas Kailath pp 1255ndash1261Kluwer Academic Publishers Norwell Mass USA 1997
[7] S Tatikonda A Sahai and S Mitter ldquoStochastic linear controlover a communication channelrdquo IEEE Transactions on Auto-matic Control vol 49 no 9 pp 1549ndash1561 2004
[8] O C Imer andT Basar ldquoOptimal control with limited controlsrdquoin Proceedings of the American Control Conference pp 298ndash303June 2006
[9] L Schenato B Sinopoli M Franceschetti K Poolla and SS Sastry ldquoFoundations of control and estimation over lossynetworksrdquo Proceedings of the IEEE vol 95 no 1 pp 163ndash1872007
[10] P Bommannavar and T Basar ldquoOptimal control with limitedcontrol actions and lossy transmissionsrdquo in Proceedings of the47th IEEE Conference on Decision and Control (CDC rsquo08) pp2032ndash2037 Cancun Mexico December 2008
[11] C D Charalambous and A Farhadi ldquoLQG optimality andseparation principle for general discrete time partially observedstochastic systems over finite capacity communication chan-nelsrdquo Automatica vol 44 no 12 pp 3181ndash3188 2008
[12] D Georges G Besancon and J-F Dulhoste ldquoA decentralizedoptimal LQ state observer based on an augmented Lagrangianapproachrdquo Automatica vol 50 no 5 pp 1451ndash1458 2014
[13] Y-LWang andQ-L Han ldquoModelling and controller design fordiscrete-time networked control systems with limited channelsand data driftrdquo Information Sciences vol 269 pp 332ndash348 2014
[14] T Cover and J Thomas Elements of InformationTheory WileyNew York NY USA 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of