reports - uppsagd · pdf fileabout prisma mission events news organisation contacts images ......
TRANSCRIPT
ABOUT PRISMA MISSION EVENTS NEWS ORGANISATION CONTACTS IMAGES
LATEST NEWS
The latest reports are published in this section. Please use the menu on the left to access all reports
regarding a specific event.
Reports:
ECAPS successfully completes HPGP firings on Prisma in the extended mission
Finally, all planned firings with the HPGP propulsion system on Prisma have been successfully been
completed. On Friday night, September 9th, a 75 sec continuous firing was performed; the longest
yet with a HPGP thruster in space, and the accumulated number of pulses exceeded 50,000. 363
sequences have been fired and 63% of the propellant has been consumed. 2 kg of the HPGP
propellant remains which will be used for providing ΔV for new mission objectives during the
remainder of the mission before decommissioning. After 15 months in space, with no indications of
degradation the flight demonstration is evolving into a space flight qualification.
Many thanks to you all for making this happen!!!
Signing off (for now)
Written by Kjell Anflo 2011-09-13 - 00:37:39
ECAPS HPGP firings on Prisma were demonstrated for invited guests
About twenty invited guests from three NASA Centers; Goddard Space Flight Center, Marshall Space
Flight Center, Ames Research Center, as well as ESA, Astrium, SSTL, ATK and Moog witnessed the
HPGP firings in situ at the PRISMA Mission Control Center during three days. All firings have been
nominal. The accumulated number of pulses is quickly approaching 50,000. More than 350 sequences
have been fired and 60% of the propellant has been consumed. HPGP-5 is the last planned
demonstration before decommissioning and will be concluded on September 12, 2011. Thereafter the
HPGP system will be used for providing ΔV to new mission objectives during the remainder of the
mission.
Written by Kjell Anflo 2011-09-08 - 22:51:59
ECAPS In-Space Demonstration of the High Performance Green Propulsion System
Continues in the Extended Prisma Mission
The fifth HPGP specific demonstration block (HPGP 5) has started after three months of Hibernation.
2000 pulses were fired during 4 sequences, all nominal. One of the goals for this block is to reach
50,000 pulses. Operations are now performed with a crew of only three personnel. HPGP 5 is planned
to be performed during 10 days. At the end of HPGP 5 invited guests from space agencies and major
space industries will participate in the operations at the Prisma mission control center in Solna.
Written by Kjell Anflo 2011-08-25 - 00:49:19
Prisma Re-Handover
Today, August 23, 2011 at 14:42:24 UTC, the control of Prisma was returned to Sweden after a five
month period at the German Space Operations Center (GSOC). During this period many different
ONGOING EVENTS
Latest News
PROX/FARM VBS
COMING EVENTS
PREVIOUS EVENTS
BLOG IN SWEDISH

experiments were performed in a responsive and agile way by GSOC, who also introduced several
ground stations by adding Weilheim and Inuvik antennas. Further, multiple and overlapping passages
within the same orbit was executed by GSOC, to achieve 30 minutes long contacts with the
spacecraft. Many thanks for the great work GSOC!
The transition of operational control went very smoothly and took only one passage, and tonight we
start preparing the wrap up of the original mission timeline.
The original timeline was divided in two parts, the first containing the primary misson objectives and
the second part containing the secondary, and only a few days remain which are split between more
HPGP experiments and completing FARM experiments.
The HPGP experiments start tomorrow and the spacecraft is being reconfigured right now. HPGP
Experiment programmes are being uploaded, ready to be released tomorrow.
After these days, which are fourteen to be exact, a new phase begins, where new (and some old)
Experimenters are introduced to perform their own experiments on Prisma. This new phase, called
Prisma Extension, entails new operational challenges where the time from experiment idea to
onboard execution will be shortened further, still following the nominal validation and simulation path.
Written by Thomas Karlsson 2011-08-23 - 21:25:20
View of Tango from 41km
As Mango returns home from its solo experiment (AOK), GSOC is activating the VBS every now and
then to take a look at the final destination: the Tango satellite. And it is a beautyfull view. The video
below is taken from 41km, and the GPS navigation has in the mean time been activated. The
intensity of the objects has been enhanced for better contrast. The VBS is observing the approach
from the passenger seat, and is apparantly getting good lighting conditions. During the ARV
experiment, the sun angle was such that 30km was the maximum distance for VBS observations, but
here at 41km and at this time of the year, there is still a large part of navigation data to be collected.
Mango is coming home!
Written by Ron Noteborn 2011-08-19 - 13:32:00
Fine control!
As we do not give any news about the AOK experiment since more than one week, one could think
that the experiment is ended or something got wrong. Nothing of this! We were silent but not absent
and always working hard. After the reference orbit reacquisition phase (Fig. 8) a 5 days control-
tuning phase took place. This means that the AOK controller’s degree of freedom has been kept
restricted (by limiting the allowed maneuver magnitude and setting long maneuver duty cycles) in
order to understand which are the main constraining factor for the control performance. In simpler
words, AOK was given the possibility to keep the real orbit close to the reference using only one
“shot” in long time periods. In the perfect world this single maneuver opportunity would be exactly
the right one to keep the orbit with a minimal fuel expense. In the real world there are elements as
the navigation accuracy or the orbital perturbations forces environment which limit the accuracy of
this single shot. Thus in the control-tuning phase despite of the degraded control performance I was
able to understand a lot in order to give the right control settings to AOK for the best control
accuracy performance. We are now since almost two weeks in the fine control phase in which AOK is
controlling the LAN with an accuracy of 10 m.

The piece of the action
And now, finally a new issue of our column “The piece of the action”!
Fig. 13 shows better than any explanation what I do intend for fine control. The red lines define the
±10 m control window. As always it is very interesting to observe the difference between what AOK
can see on-board and the reality (POD) and how this difference influences the control. It can be
noticed how AOK can keep the orbit not with a single shot but with some small corrections after a
main orbit maneuver.
Figure 13 Semi-major axis deviation (top), LAN deviation (middle), magnitude of along-track
maneuvers (bottom) computed by AOK during the guidance process as between the 5th and 8th of
August
Monitoring volcanoes Etna and Stromboli…
Now that MANGO is really locked on its reference orbit, DVS data-takes (pictures) can be planned
well in advance for long periods of time and with a high accuracy. In fact knowing the reference orbit
(stored on my laptop…) now means knowing in advance where the real satellite is at anytime. How
does the process of taking a picture with MANGO work? It is really simple.
First I run a little software I wrote to which I give the coordinates of a location on the planet and the
period of time in which I would like to take a picture. The program gives me as output a plot showing
the different possible tracks I could use in that period of time and when I should switch-on the DVS
camera. For example I want to take a picture of volcano Etna that right in the last weeks showed up
some activity. I give to the software the Etna’s coordinates and the time period 8th to 11th of August.
I have to consider that a single DVS data-take means 13 shots taken in 10 minutes over about 4000
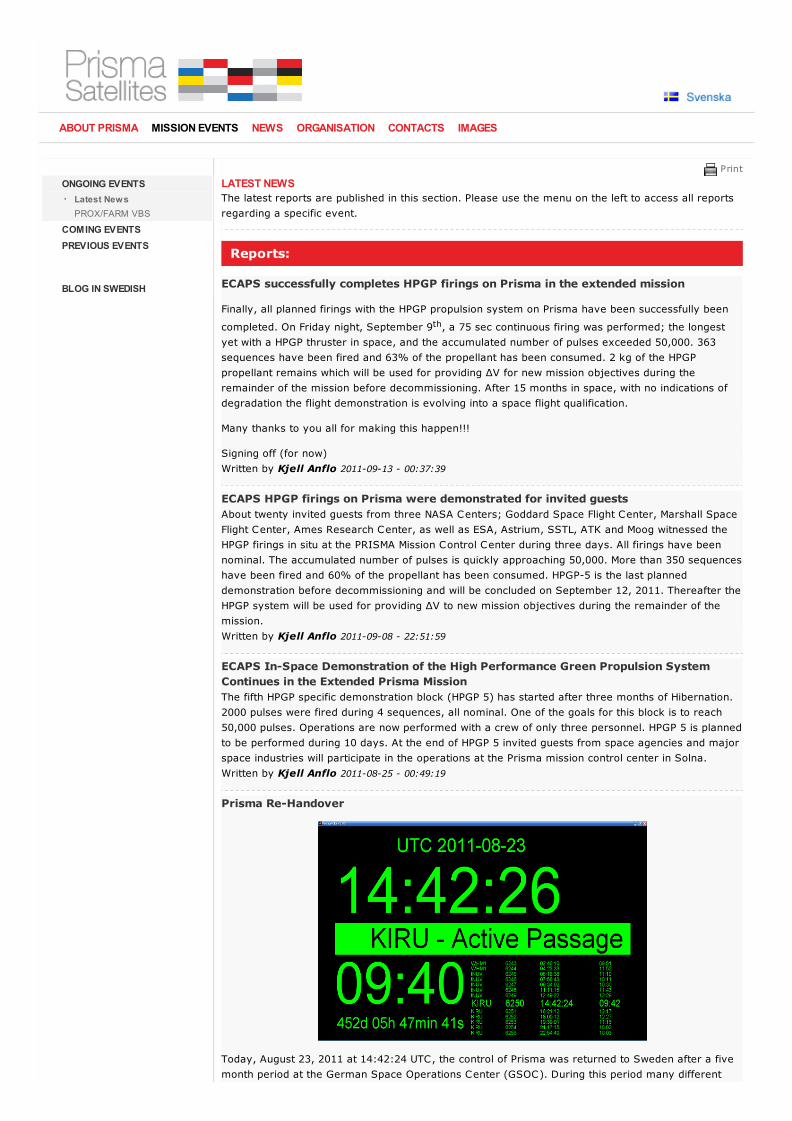
km on Earth. Fig. 14 shows one output of my software (red tracks are during the daylight). From the
plot it is evident which the ground track to be used is. I set up things in a way that the Etna picture
will be about in the middle of the 13 pictures sequence. From this consideration I schedule the start
of the data-takes (switch-on of the camera) during orbit 6064 at 16:52:00 UTC on the 10th of August
when MANGO is flying about over the city Riga.
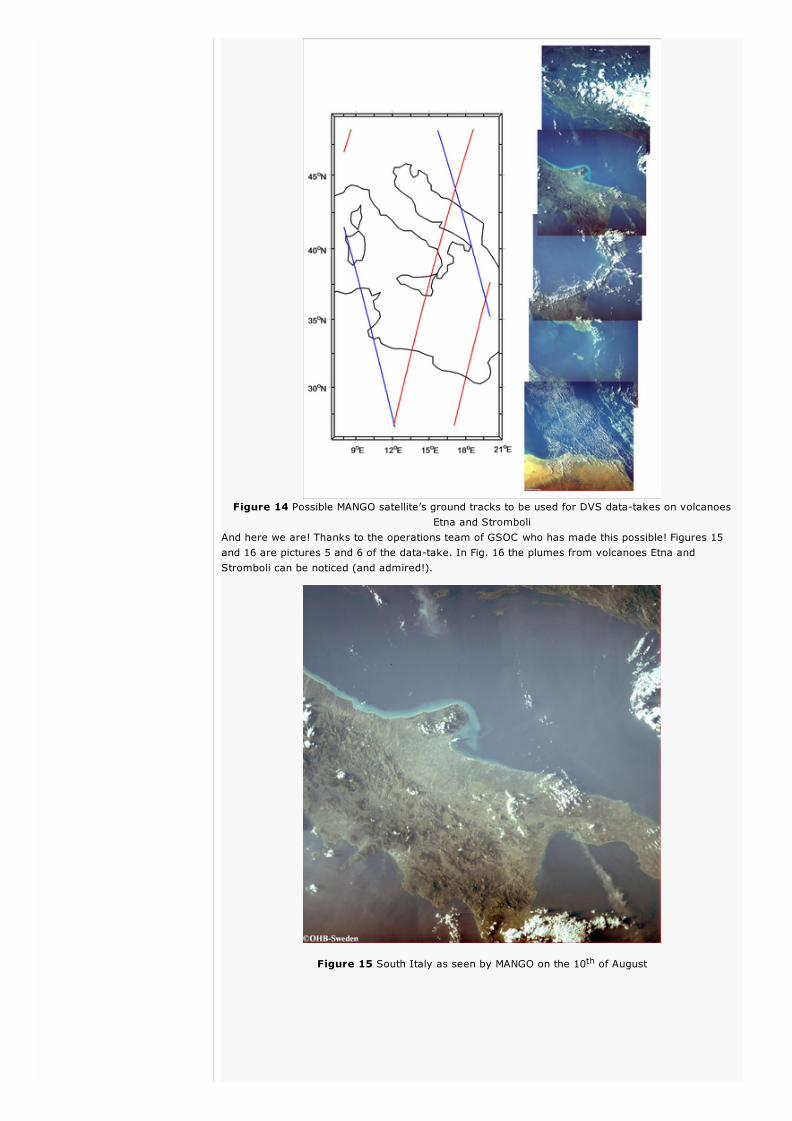
Figure 14 Possible MANGO satellite’s ground tracks to be used for DVS data-takes on volcanoes
Etna and Stromboli
And here we are! Thanks to the operations team of GSOC who has made this possible! Figures 15
and 16 are pictures 5 and 6 of the data-take. In Fig. 16 the plumes from volcanoes Etna and
Stromboli can be noticed (and admired!).
Figure 15 South Italy as seen by MANGO on the 10th of August
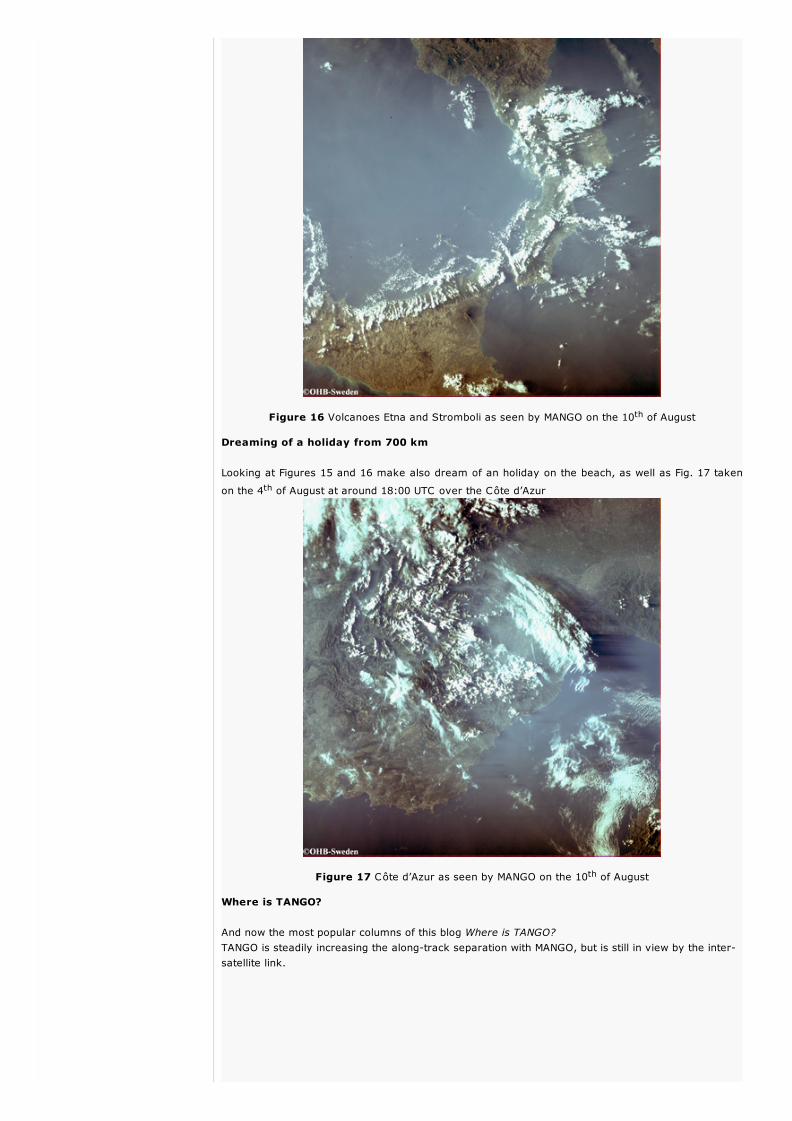
Figure 16 Volcanoes Etna and Stromboli as seen by MANGO on the 10th of August
Dreaming of a holiday from 700 km
Looking at Figures 15 and 16 make also dream of an holiday on the beach, as well as Fig. 17 taken
on the 4th of August at around 18:00 UTC over the Côte d’Azur
Figure 17 Côte d’Azur as seen by MANGO on the 10th of August
Where is TANGO?
And now the most popular columns of this blog Where is TANGO?
TANGO is steadily increasing the along-track separation with MANGO, but is still in view by the inter-
satellite link.

Figure 18 Relative position MANGO – TANGO in the RTN orbital frame as on the 9th of August
Written by Sergio De Florio 2011-08-12 - 05:35:00
Where is TANGO (August 3rd)
Some of our most enthusiastic readers wrote us declaring themselves literally addicted to our
popular column Where is TANGO? Here we are!
TANGO is now at 20 km from MANGO (Fig. 12), but the intersatellite-link keeps working!
Written by Sergio De Florio 2011-08-04 - 12:47:36
Taking Images of Earth from 700 km altitude
Yesterday a series of new images were taken by Mango, this time while AOK is in closed loop. Here
are some nice little details from the very latest pictures, enjoy the landscape!
Lake Powell and the Colorado River as it flows towards Grand Canyon (hidden beneath the clouds in
the lower left)

The Great Salt Lake and Desert, Utah
Written by Niklas Ahlgren 2011-07-28 - 16:30:37
Where is TANGO? (July 26th)
And now our most popular column Where is TANGO?
Figures 10 and 11 show the evolution of the relative position of MANGO with respect to TANGO in the
orbital frame RTN from the 18th to the 26th of July. The increased relative drift rate in the along-
track-direction after the beginning of the 1.5 days reacquisition maneuver can be appreciated in Fig.
10 as well as the return to a smaller drift rate after the execution of the counter-maneuver by AOK.
Fig. 11 gives a picture of the situation in the in-orbital-plane and out-of-orbital-plane.
Figure 10 Relative position MANGO – TANGO in the RTN orbital frame as on the 26th of July
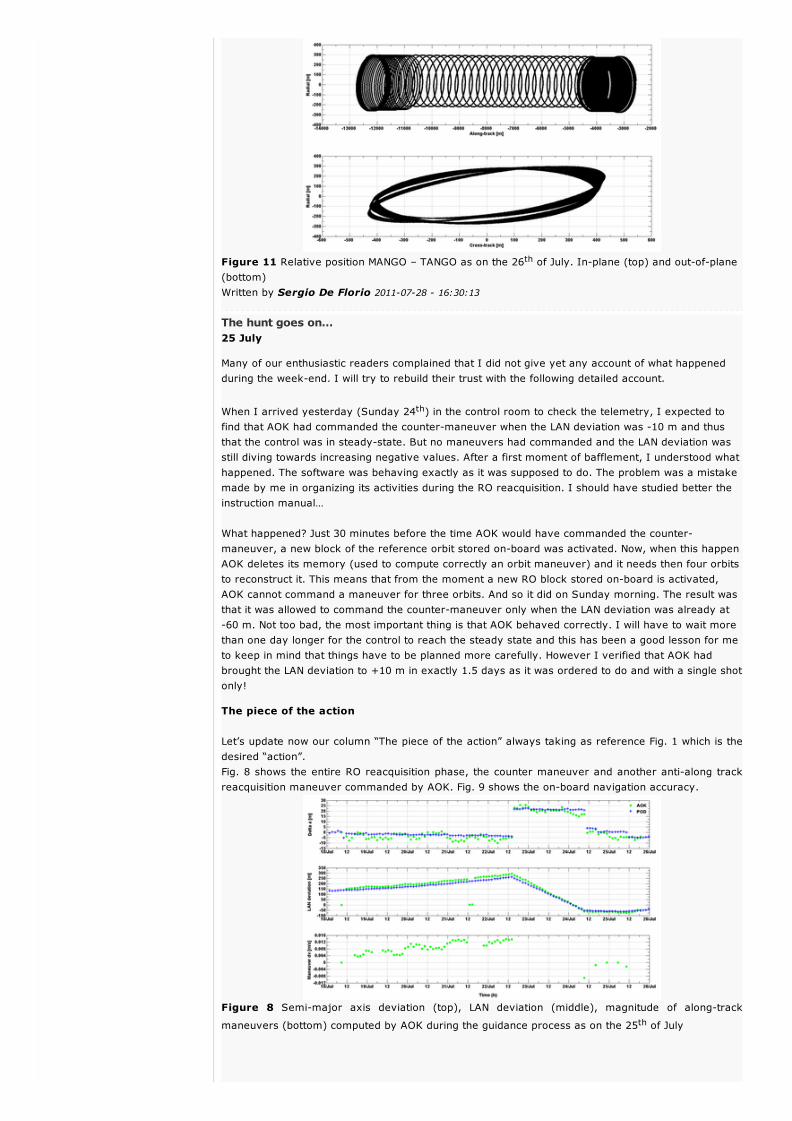
Figure 11 Relative position MANGO – TANGO as on the 26th of July. In-plane (top) and out-of-plane
(bottom)
Written by Sergio De Florio 2011-07-28 - 16:30:13
The hunt goes on…
25 July
Many of our enthusiastic readers complained that I did not give yet any account of what happened
during the week-end. I will try to rebuild their trust with the following detailed account.
When I arrived yesterday (Sunday 24th) in the control room to check the telemetry, I expected to
find that AOK had commanded the counter-maneuver when the LAN deviation was -10 m and thus
that the control was in steady-state. But no maneuvers had commanded and the LAN deviation was
still diving towards increasing negative values. After a first moment of bafflement, I understood what
happened. The software was behaving exactly as it was supposed to do. The problem was a mistake
made by me in organizing its activities during the RO reacquisition. I should have studied better the
instruction manual…
What happened? Just 30 minutes before the time AOK would have commanded the counter-
maneuver, a new block of the reference orbit stored on-board was activated. Now, when this happen
AOK deletes its memory (used to compute correctly an orbit maneuver) and it needs then four orbits
to reconstruct it. This means that from the moment a new RO block stored on-board is activated,
AOK cannot command a maneuver for three orbits. And so it did on Sunday morning. The result was
that it was allowed to command the counter-maneuver only when the LAN deviation was already at
-60 m. Not too bad, the most important thing is that AOK behaved correctly. I will have to wait more
than one day longer for the control to reach the steady state and this has been a good lesson for me
to keep in mind that things have to be planned more carefully. However I verified that AOK had
brought the LAN deviation to +10 m in exactly 1.5 days as it was ordered to do and with a single shot
only!
The piece of the action
Let’s update now our column “The piece of the action” always taking as reference Fig. 1 which is the
desired “action”.
Fig. 8 shows the entire RO reacquisition phase, the counter maneuver and another anti-along track
reacquisition maneuver commanded by AOK. Fig. 9 shows the on-board navigation accuracy.
Figure 8 Semi-major axis deviation (top), LAN deviation (middle), magnitude of along-track
maneuvers (bottom) computed by AOK during the guidance process as on the 25th of July

Figure 9 On board navigation accuracy – Position in RTN
Written by Sergio De Florio 2011-07-28 - 16:29:49
Closed-loop! At the hunt for the reference orbit
22 July
This morning I decided to put AOK in closed-loop one day earlier than scheduled as the first four
days of commissioning phase have been enough to verify that everything is working properly. As
soon as AOK will be put in closed-loop it will start the reference orbit reacquisition phase. This means
that it will have to bring the LAN deviation (Figures 1 and 6) back into the control window (±10 m)
starting from 300 m. This is one of the most delicate phases of the experiment as a large maneuver
is required and the dynamics is much faster than it is in steady-state. The problem was now deciding
how long was to be the re-acquisition phase. There is the possibility to tell to AOK by TC a time term
by which he has to accomplish the job. Larger will be the given time, slower will be the RO
reacquisition and thus smaller the maneuver commanded. Imposing a reacquisition time thus means
telling AOK to bring the LAN deviation to +10 m in that time if the LAN deviation is positive. After
that, when the LAN deviation diving towards always smaller (negative) values will reach -10 m, AOK
will command a counter-maneuver to let the LAN deviation within the control window and thus
bringing the control dynamics in steady-state.
The counter maneuver is the important event to be monitored and we will have to be at the control
centre for this event. Now, today is Friday…Monday would be too late. We have to decide if we prefer
working at the control centre on Saturday or on Sunday…We decide for Sunday. I will impose a
reacquisition time such that the counter-maneuver will take place on Sunday morning at around 10
o’clock (local time) that is a reasonable time for us to be there on Sunday morning. It’s like having a
date with a maneuver on Sunday morning, but so to say everyone with his own dates…
By the way, it is a strange law of space operations that if something important (expected or
unexpected) has to happen, it will be on Sunday and possibly in the early morning!
Then we are in the control room during the 10 minutes passage starting at 11.00 UTC (13.00 local).
I’m going to push the red button that will put MANGO’s orbit in AOK’s hands when the red telephone
rings: “Stop everything! If AOK will start now commanding maneuvers the collision probability with
debris IRIDIUM 33 DEB (ID 35295) will increase!”. The size of this debris is estimated to be around
10 cm and the minimum distance/radial distance foreseen with MANGO is about 518/69 m. (Of course
there were neither red buttons nor red telephones, but it was nice to say it…). We finally manage to
push the red button in pass 5788 at 12.35 UTC and AOK executed an along-track maneuver of
+0.0136 m/s.
Written by Sergio De Florio 2011-07-28 - 16:29:13
Where is TANGO?
By popular demand from our devoted readers we open today a new column of this blog: Where is
TANGO?
Before showing where TANGO is, some technical explanations are due.
From the start of the AOK experiment, TANGO’s on-board GPS receivers are switched-on for only
one orbit a day. In fact gaps in TANGO’s GPS data are likely to occur due to the weakening of the
inter-satellite link with the always increasing MANGO-TANGO along-track separation and its relatively
fast rotation (TANGO is in safe mode). These GPS data gaps can disturb the proper functioning of
MANGO’s on-board navigation filter working in the operating mode and with the settings optimal for
the AOK experiment. These one-orbit GPS data are anyway sufficient to perform a POD (with a much
degraded accuracy of course) and to know with an acceptable accuracy where TANGO is. Fig. 7
shows the evolution of the relative position of MANGO with respect to TANGO in the orbital frame RTN
from the 15th of July when the formation geometry reconfiguration started after I sent an e-mail
indicating the desired formation configuration at the start of the AOK experiment. The relative along-
track separation on 19th July was about 3.5 km. The constant drift of TANGO getting away from
MANGO can be appreciated in the middle plot.

Figure 7 Relative position MANGO – TANGO in the RTN orbital frame
Written by Sergio De Florio 2011-07-27 - 12:13:10
What’s going on
At the third day of commissioning phase, we have to point out which is the current situation and to
decide if put AOK in closed-loop already tomorrow or on Saturday as scheduled in the present plan.
This is what I could see this morning on the telemetry AOK page (Fig. 3) in the last pass:
Figure 3 AOK telemetry page
From the last TM data, it results that everything is OK! The present LAN deviation is around 238 m
and the computed maneuver is around 0.01 m/s.
Now some analyses on the longer period in order to check if there was any anomaly and in case to
explain it.
First of all the GPS navigation system has to be checked. I plot the trend of more than 50 TM
parameters and everything is OK. There is indeed some small anomaly but it is well clearly
explained.
Now let’s take a look to the GPS based on-board navigation accuracy. This check is performed by
comparing the position and velocity of the spacecraft estimated on-board with the position and
velocity estimated on-ground with the POD process. The orbit determination made on-ground is also
based on GPS data but it is far more accurate due also to the availability of better information about
the GPS satellites positions and to the far larger computational power available. The navigation
accuracy (Figures 4 and 5) is evaluated in local orbital frame (R axis radial, N anti-cross-track and T
along-track oriented). In a more “drinkable” (friendly) language, R is along the line joining the centre
of mass of the Earth with the centre of mass of the satellite, T is about along the velocity vector of
the satellite (this is rigorously true for a perfectly circular orbits) and N is perpendicular to the plane
formed by T and R.
The position of MANGO is estimated on-ground with the POD process with an accuracy of the sub-
centimetre level!!! We can thus state that the orbit estimated by the POD process represents very
well the real orbit.
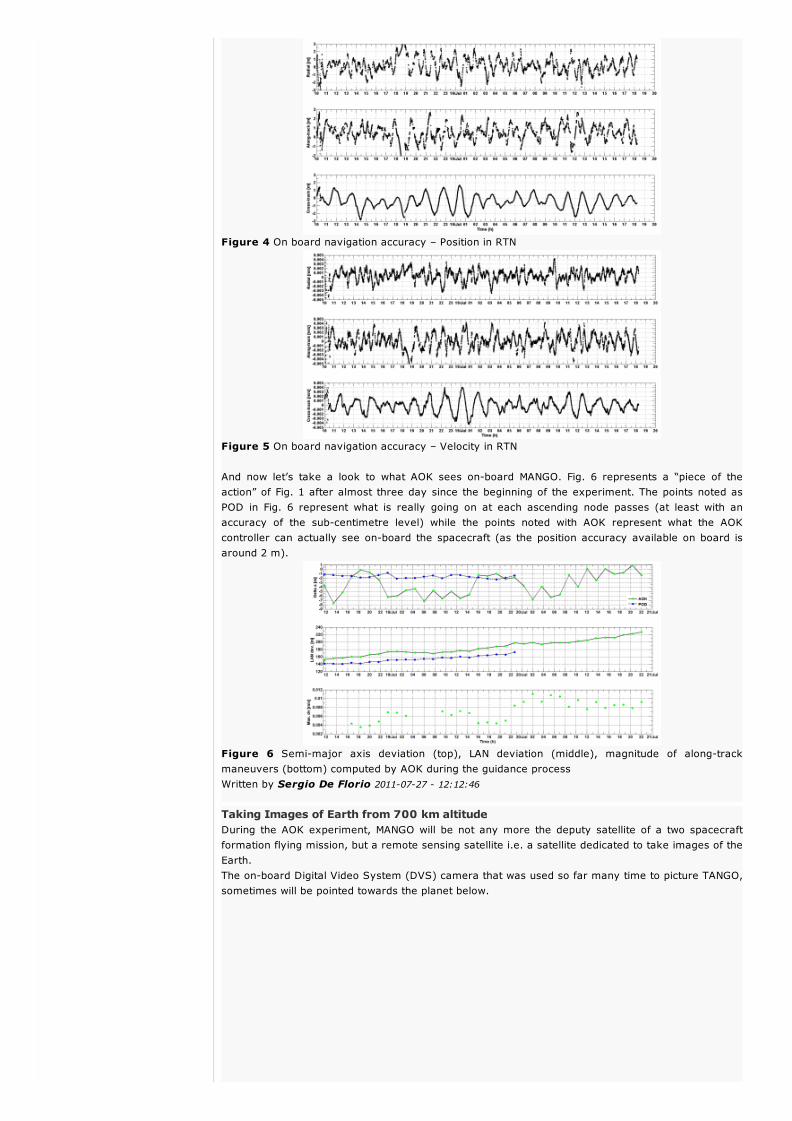
Figure 4 On board navigation accuracy – Position in RTN
Figure 5 On board navigation accuracy – Velocity in RTN
And now let’s take a look to what AOK sees on-board MANGO. Fig. 6 represents a “piece of the
action” of Fig. 1 after almost three day since the beginning of the experiment. The points noted as
POD in Fig. 6 represent what is really going on at each ascending node passes (at least with an
accuracy of the sub-centimetre level) while the points noted with AOK represent what the AOK
controller can actually see on-board the spacecraft (as the position accuracy available on board is
around 2 m).
Figure 6 Semi-major axis deviation (top), LAN deviation (middle), magnitude of along-track
maneuvers (bottom) computed by AOK during the guidance process
Written by Sergio De Florio 2011-07-27 - 12:12:46
Taking Images of Earth from 700 km altitude
During the AOK experiment, MANGO will be not any more the deputy satellite of a two spacecraft
formation flying mission, but a remote sensing satellite i.e. a satellite dedicated to take images of the
Earth.
The on-board Digital Video System (DVS) camera that was used so far many time to picture TANGO,
sometimes will be pointed towards the planet below.
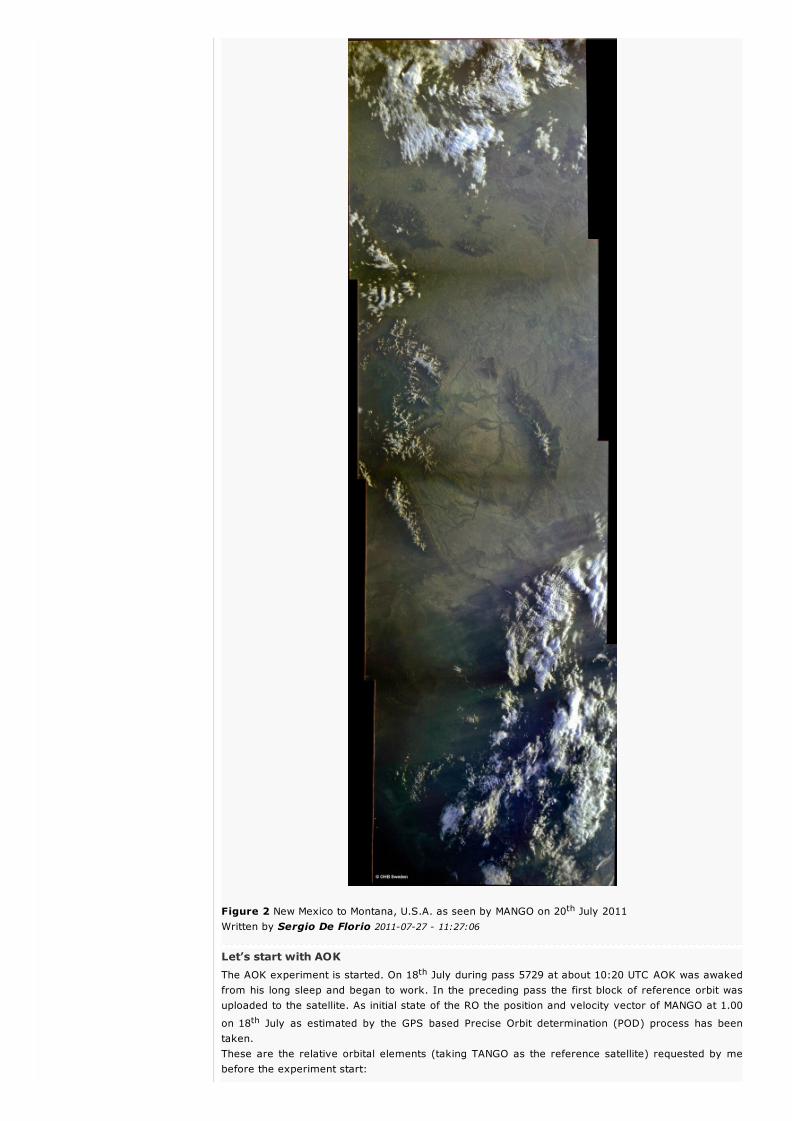
Figure 2 New Mexico to Montana, U.S.A. as seen by MANGO on 20th July 2011
Written by Sergio De Florio 2011-07-27 - 11:27:06
Let’s start with AOK
The AOK experiment is started. On 18th July during pass 5729 at about 10:20 UTC AOK was awaked
from his long sleep and began to work. In the preceding pass the first block of reference orbit was
uploaded to the satellite. As initial state of the RO the position and velocity vector of MANGO at 1.00
on 18th July as estimated by the GPS based Precise Orbit determination (POD) process has been
taken.
These are the relative orbital elements (taking TANGO as the reference satellite) requested by me
before the experiment start:

ada = 2 m, adex = 0, adey = -300 m
adix = 0, adiy = -400 m, adu = -3000 m
And just before the start of AOK the real relative orbital elements where:
ada = 2.9 m, adex = -58 m, adey = -272 m
adix = -36 m, adiy = -396 m, adu = -3205 m
Very good job! Many thanks to the personnel of the German Space Operations Center (GSOC)
involved.
These initial conditions where meant to have TANGO flying “in front” of MANGO at a safe distance and
drifting away thanks to the positive da (TANGO flying “below” and thus faster than MANGO). The
relative eccentricity and inclination vector parallel (collision avoidance criteria).
Some tension before receiving the first Telemetry (TM) data from the spacecraft. Sometimes a
glance to the Lego model of the PRISMA spacecraft in the control room, thinking that now we are not
playing with Lego but with the real stuff…But AOK is alive and working properly! The initial LAN error
of the spacecraft with respect to the RO was computed by AOK as about 152 m.
The first five days will be of commissioning phase. This means that AOK will be allowed only to
compute orbit correction maneuvers but not to command them to the propulsion system. The
commissioning phase is intended to verify that all the software functionalities are working correctly,
to evaluate the accuracy of the on-board navigation filter and the magnitude of the main perturbing
forces (atmospheric drag and lunar-solar gravity) by the evolution of the deviation of real semi-
major axis and LAN from their reference values. In this phase MANGO will be in free (uncontrolled)
motion, the LAN deviation will steadily increase and the negative value of the difference between the
real and the reference semi-major axis will steadily increase in magnitude due to the decay of the
real orbits’ semi-major axis caused by the atmospheric drag.
The reference orbit, propagated once for the entire experiment, will be uploaded to the satellite in
blocks every 3 days. Each uploaded block has a validity of about 3.2 days corresponding to the
available on-board buffer which contains the GPS time of the first reference LAN, 50 consecutive in
time reference LAN values and 50 semi-major axis values at the ascending node. The semi-major
axis values are used by the AOK software for atmospheric drag on-board estimation. Each block is
generated in a way to assure at least 5 hours time overlap with the contiguous ones. This RO upload
strategy allows the exploitation of 3 days of the available 3.2 of each block ensuring at the same
time the availability of two consecutive passes for the upload. The possibility of generating blocks
with different time overlaps gives a great flexibility in the scheduling and re-scheduling of RO
uploads.
Some planning and hopes
The TCs procedures that will be sent to the spacecraft for the AOK experiment are first validated in
DLR by means of a tool capable of a realistic simulation scenario involving DLR’s flight software
modules. Once it has been verified that the simulation output does not present an unexpected
behavior, the TCs procedure is validated in SSC by means of a simulation involving the entire
PRISMA flight software. The results are finally double checked at DLR. Fig. 1 shows a representative
plot of the validation of the TCs procedures that will be uploaded to the spacecraft during the AOK
experiment. The plots represent the first 20 days of the experiment. The deviation of the real semi-
major axis and the LAN with respect to the reference and the maneuvers executed by AOK are
shown. The red lines represent the LAN control window and the green cross the time at which AOK is
put in closed loop. A discontinuity can be noticed in the LAN deviation of Fig. 1 because of the delay
in the upload of the new RO during the commissioning phase. The expiration of the RO stored on-
board triggers the transition to on-board propagated RO and the LAN deviation starts again from a
null value as the on-board propagator uses as initial state the actual satellite state at the moment of
the mode change. The same event can be noticed four days before the end of the experiment, but
this time in closed-loop. A timed 1.5 days re-acquisition maneuver of 0.0113 m/s is executed at the
moment the closed-loop is commanded by TC.
Fig. 1 represents more or less what we hope to see in reality during the AOK experiment!

Figure 1 TCs validation - Semi-major axis deviation (top), LAN deviation (middle), magnitude of
along-track maneuvers (bottom) computed by AOK during the guidance process
Written by Sergio De Florio 2011-07-27 - 11:17:20
AOK - An Introduction
Main goal of the AOK experiment is demonstrating satellite autonomous orbit control using a
guidance law for the orbits’ Longitude of Ascending Node (LAN). Using GPS-based absolute navigation
data, AOK shall command thrusters activations in the orbital frame to autonomously control the orbit
within a predefined window. The main requirement of the experiment is to demonstrate a control
accuracy of the osculating ascending node of 10 m (1s). Main differences with respect to similar
experiments performed in the past are the extremely strict required control accuracy and the full
autonomy enhanced also by the possibility of on-board reference orbit propagation. This technology
is foreseen to be widely used in the area of remote sensing missions.
Just a moment, we are already lost in the strange language of scientists and engineers…
What’s LAN control?
OK, let’s make a step back, this is anyway a blog, not an handbook of space flight dynamics. What is
LAN control? No wait…what is a LAN?
It is simple. The MANGO satellite is flying at about 700 km and his orbital plane has an inclination of
about 97 deg with respect to the Equator. When he makes a complete revolution around the Earth
(about 15 revolutions per day), his ground track intersects the Equator two times. The LAN is the
longitude on Earth at which the satellite’s ground track intersects the Equator while flying from South
to North. Now, why controlling the LAN?
If one wants to observe with a satellite, the same location, for example at the Equator, once per
week always in the same day of the week and at the same time, a specialized orbit is required. This
orbit, a repeat track orbit, can be designed using the laws of orbital mechanics, but is in fact an ideal
trajectory. A real satellite put after launch into this ideal orbit, will soon get away from it because of
the perturbation forces (not only gravitational) influencing his real orbit. For example MANGO’s orbit
is mainly influenced by the atmospheric drag (Yes man! At 700 km the Earth’s atmosphere has still
something to say). Thus for this reason if we want to keep a satellite on an ideal repeat track orbit,
we have from time to time to correct his trajectory by means of orbital maneuvers.
OK, now it’s clear. But all this stuff is probably one of the first things that where implemented since
the first remote sensing satellites was launched. What’s new with AOK? Why the experiment?
So far, orbit keeping maneuvers have been computed on ground and sent by Telecommands (TCs)
to the satellite to be executed by the on-board thrusters.
With AOK is the satellite itself which autonomously estimates when an orbit keeping maneuver is
needed and give command to the on-board thrusters to execute the maneuver!!!
How does it work?
The LAN is controlled simply by giving a velocity increment or decrement in the direction of flight.
MANGO always knows its absolute position with the accuracy of 2 m by means of his GPS based on-
board navigation system realized by DLR. The ideal reference trajectory is stored on-board the
satellite’s mass memory so thus MANGO always knows at which longitude it is supposed to cross the
equator. At each revolution he has, so to say, a date at the Equator with an ideal satellite and he
knows exactly if he is in time or note. As we do (or better as punctual people do…), when MANGO is
in late it hurries up, when he is early he slows down (as anyway he has to get in time there but it will
not able to stop there), when he is in time he simply maintain its velocity. To hurry up MANGO has to
decrease his semi-major axis with a velocity decrement and vice-versa to slow down. It is not very
intuitive, but this is orbital mechanics.
But wasn’t PRISMA a formation flying mission? Where is TANGO?
TANGO is in holiday. The AOK experiment concerns only MANGO as it is an absolute orbit control
experiment. Just before the beginning of the experiment TANGO is put in a safe position and will drift

away until the end of the experiment. Information from TANGO will be received by MANGO until the
along-track separation will be large enough to render impossible the communication between the two
satellites.
Written by Sergio De Florio 2011-07-26 - 15:15:48
Successful first year in Orbit
On June 15, Prisma has been in orbit for one successful first year.
Looking back, it has been a remarkable year with many spectacular events and mission milestones,
some more difficult than others. Now only a few more experiments remains in the nominal timeline
(including the extended part of the nominal timeline) and then the Prisma timeline turns the page
over and starts from a new blank sheet. This new part, called Prisma extension, contains exciting
bonus experiments defined by new partners interested in formation flying or other instruments
onboard Prisma.
Written by Thomas 2011-06-23 - 15:35:45
Successful Closed Loop Experiment in PROX/VBS
During end of May and beginning of June, we conducted the first closed loop experiments with
PROX/VBS. The objective was to stabilise Mango on a point on the positive V-bar, 10m from Tango.
From here, the docking target can be observed. These experiments were highly successful, although
data processing is still ongoing.
The first experiment simply evaluated the functionality of PROX with VBS in closed loop. This meant
the commissioning of a new attitude controller, not used yet in the mission as it is dedicated to this
experiment. It also meant the use of the tunings developed for the VBS navigation filter, to which the
previous open loop tests were dedicated. Mango responded very well to this, and we immediately
observed a positioning quality of better then 5cm in cross track and 10cm in along track.
Experiments were not always concluded successfully due to absence of VBS sensor data, leading to
safe mode.
Further developments in the experiment were dedicated to new sensor software, and a successive
application of measures that were expected to increase the positioning performance, including control
box settings, control frequency and application of differential thrust. On June 9, the last experiment
(for now) was performed, were the positioning error had been reduced to better then 5cm along
track, and 3cm cross track. The standard deviations of the positioning error were 1.4, 0.9 and 1.3cm
(along, cross and radial).
The advantages of using VBS over GPS in this kind of forced motion experiments became very
apparant, as optical navigation is a much more direct measurement of relative spacecraft state. The
GPS navigation relies heavily on modelled dynamics to reduce the rather large raw measurement
errors to the 5cm level we are used to with GPS Navigation on Prisma. During forced motion (were
thrusts are applied once per minute to once per three minutes) the GPS navigation has a really hard
time, but still manages to give decimeter accuracy. The optical navigation improves this, as the
navigation filter relies less on the dynamics, and the measurement in itself is of higher quality then
GPS raw data. The result is less slowly varying biases, making it possible to position the spacecraft
center of mass within a large match box.
Below is a video made from the data from the VBS (candidates for LED positions are blue crosses,
with the Tango pose drawn in blue when it is available from the VBS. Grey is the reconstruction from
oboard GPS and Tango magnetometer/sun sensor based estimation). Initially the spacecraft is
controlled by GPS, but then transitions into PROX/VBS. The reorientation to account for camera
misalignment can be clearly seen, as well as that the VBS looses track due to the high rotation rate
at that moment. The spacecraft is then stationkeeping at 10m distance.

The PROX/VBS experiments took place in the spacecraft local orbit frame (SLO), but in the mean
time we have done the first experiments in the Tango body reference frame (SCB). These
experiments fix Mango on a point relative to the Tango spacecraft structure, meaning that if Tango
moves, Mango moves along. The first experiment placed Mango on 10cm on the -Y panel. This is
basically the same point as the SLO experiment, but since Tango has a misalignment with SLO of
some 10 degrees, the off positioning from the Vbar point was as large as 2m. Mango indeed
succeeded to arrive at this point, at which the FARM mode was activated. FARM has the same
functionality as PROX (it can control in Tango SCB frame) but it has extra guidance logic to have a
position dependant control box, and can autonomously move towards a predefined docking location.
The first experiment again commissioned the software: a new attitude guidance function was to be
checked out, which points the VBS camera to the docking target) and the capability of FARM to keep
the spacecraft in the Tango SCB was evaluated. The experiment was a success: Mango was over an
orbit in the Tango SCB frame, moving from 10m to 8.5m in 1500s and back again. The attitude
guidance worked well. We are now waiting for the next opportunity to test this further, and to
decrease the distance.
More to follow!
Written by Ron Noteborn 2011-06-13 - 09:58:34
Swedish National Space Board, tel +46 8 627 64 80 · OHB-Sweden, tel +46 8 627 64 40