referat 1
TRANSCRIPT

A NEW TENDON DRIVEN ROBOTIC ANTHROPOMORPHIC
HAND - CONSTRUCTION SIMULATIONS AND
FABRICATION
O NOUĂ MAcircNĂ ROBOTICĂANTROPOMORFĂ ACŢIONATĂ PRINTENDOANE - CONSTRUCŢIESIMULĂRI ŞI FABRICAŢIE
1 IntroductionIn the past 30 years a great number of artificial grippers have been developedfor industrial applications or as laboratory research products [1 2 3 4 5 6 and 7]In the industrial environment we find avast array of non anthropomorphicmechanical grippers used from the foodprocessing industry to the automotiveindustry The mechanical model of thesegrippers is often characterized by a small number of DOFs which leads to a reduced gripping potential and poorperformance [8] For the industry theircapabilities are satisfactory but inapplications where the array movement ofthe mechanical parts is complex theindustrial grippers are not the solutionFor example in the robotic ormedical prosthetic field the prerequisitesfor such products are force capabilitiesclose to those developed by the humanhand modern sensing devices aestheticsmass friendly control interface and exactmovement replication as the human handThe last condition can be solved only bydesigning a mechanical model withenough degrees of freedom Therefore themechanical model for such a device
1 IntroducereIcircn ultimii 30 ani un mare număr de sisteme mecanice de prehensiune au fost dezvoltate pentru mediul industrial sau ca şi produse de studiu icircn laboratoarele de cercetare [1 2 3 4 5 6 and 7] Icircn mediul industrial se poate observă ogamă foarte largă de sisteme mecanice de prehensiune neantropomorfe cu aplicaţii de la industria alimentară pacircnă la industria auto şi chiar militară Modelul mecanic al acestorsisteme de prehensiune este deseori caracterizat de un număr mic de grade de libertate care ducela o capacitate de prehensare redusă datoritănumărului mic de suprafeţe icircn contact cuobiectul şi deci performanţe limitate [8] Chiardacă pentru aplicaţiile industriale performanţeleacestora sunt mulţumitoare icircn domenii carereclamă o paletă cacirct mai largă de mişcări alepărţilor mecanice (bacuri degete etc) aceştigripperi industriali nu mai reprezintă o soluţieDe exemplu icircn domeniul roboticii sau alprotezării cerinţele optime pentru astfel deproduse sunt dezvoltarea de forţe de prehensare
should be developed by comparison withthe human hand which possesses only atthe phalanxes level 19 DOF [9]All around the word the scientist aretrying to solve one of the most complexproblems the replacement of a humanbody part The artificial device who willreplace the defective body part must beable to function a long period of timewithout servicing In particular aprosthetic device for the human hand orupper limb is mandatory to respect thefollowing prerequisites human friendly interms of general performance (forcecapabilities proprioceptive abilitiesmovement replication etc) aestheticsand of course it must be cost effectiveMany companies are producing suchdevices for patients in need but the costof a modern prosthetic device is highenough so only some wealthy patientsbenefit from these latest achievementsOne of these companies is TouchbionicsInc which produces the i-Limb prostheticdevice i-Limb is considered one of themost technological easy to live withprosthetic device ever created not only bythe patients who tried or used the i-Limbbut also by the medical staff This anthropomorphic handpossesses five fingers each with twophalanxes (the degree of freedom for themechanism of the hand is M = 11) Teactuation is made by five DC motorsplaced in the palm Working as prostheticdevice is enabled by two electrodesbonded to the patient skin which collectthe myoelectric signals from the musclesand transmit these signals together withthe information from the sensors to amicroprocessor Although modern by allmeans the i-Limb prosthetic device is avery expensive one This we consideredto be a major shortcoming and challenged
cacirct mai apropiate de cele ale macircinii umanesistem senzorial modern estetică masă redusăinterfaţă de comandă şi control simplă şiintuitivă şi replicarea cacirct mai fidelă a mişcărilormacircinii umane Ultima condiţie poate fiicircndeplinită doar prin conceperea unui modelmecanic cu suficiente grade de libertate modelmecanic construit prin similitudine cu modelulanatomic al macircinii umane De aceea modelulmecanic al unui asemenea produs trebuie săconţină doar la nivelul falangelor 19 grade delibertate [9]O problemă stringentă cu care se confruntăcercetătorii din icircntreaga lume este aceea aicircnlocuirii unei părti a corpului umanComponenta artificială care substituiecomponenta anatomică va trebui să fie proiectatăastfel icircncacirct să funcţioneze o lungă perioadă detimp fără alte intervenţii Icircn particular o protezăpentru macircnă sau membru superior trebuie sărespecte următoarele deziderate să aibăperformanţe funcţionale bune (forţe dezvoltategamă de mişcări sistem senzorial etc) să fieadaptabilă corpului pacientului să aibă o esteticăapropiată de aceea a macircinii umane şi să fieaccesibilă
the team of the Faculty of MechanicsCraiova to create a low cost modern easyto install and live prosthetic device 3 CAD model and simulationsIn the pursuit of constructing such acomplex product we have studied all thesimilar solutions in terms of designactuation systems sensors embeddedcontrol and materialsWe started by creating a threedimensionalmodel of the prosthesis using SolidWorks CAD software which allowedus to perform simulations with theclosingopening of the fingers with orwithout object grasping (see Figures 4 and5) The three-dimensional of the artificialhand which comprises 16 DOF wasdeveloped in relation to the actuationsystem and control system [11]The control system of a modernprosthetic device has to respect thefollowing goals1048633 To have in centre the computer1048633 To allow an easy integration ofthe sensors and actuators1048633 To permit prosthesis portability1048633 To be cost effectiveAfter a thorough study of the similarsolutions found in the control systems ofmany robotic or prosthetic hands wedecided to combine computer with anacquisition board equipped with amicrocontroller which commands the DCservomotors that drive the fingers Theoutput shaft of the five DC servomotorsthat actuate the fingers of the hand aremechanically connected with the distalphalanx (the tip of the finger) by means ofcable transmissions routed on the fingerspulleys [12 and 13] Proximity and forcesensors have been also included in thecontrol system of the prosthesis (seeFigures 2 and 3)
Multe companii produc la ora actualăasemenea produse pentru pacienţii cu amputaţiide macircnă sau membru superior icircnsă costul uneiproteze de ultimă generaţie este suficient deridicat astfel icircncacirct doar o mică parte a pacienţiloricircşi permit achiziţionarea acestui produs Unadintre companiile care produc proteze esteTouchbionics Inc Cel mai nou produs de acesttip al companiei (i-Limb) este considerat a fi unadintre cele mai avansate proteze pentru macircnă sau Proteza i-Limb posedă cinci degetefiecare cu cacircte două falange (gradul demobilitate al mecanismului protezei fiindM=11) Sistemul de acţionare cuprinde cincimotoare electrice de curent continuu plasate icircnpalmă şi cuplate cu transmisii prin cabluri şifuliiFuncţionarea ca şi proteză este permisă dedoi electrozi lipiţi pe pielea pacientului carecolectează semnalele mioelectrice ale muşchiloracestuia Deşi modernă din toate punctele devedere i-Limb este un produs inaccesibilmajorităţii pacienţilor cu amputaţii Preţul deachiziţie foarte ridicat reprezintă un maredezavantaj şi a determinat o echipă a Facultăţiide Mecanică din Craiova să demareze procesulde proiectare şi fabricare a unei proteze pentrumacircnă accesibile moderne şi performante3 Modelul CAD si simulăriS-a pornit de la crearea modeluluitridimensional al macircinii artificiale utilizacircndmediul de dezvoltare SolidWorks După aceastăetapă modelul tridimensional a fost importat icircnADAMS soft care a permis realizarea unorsimulări a comportamentului şi funcţionăriimacircinii artificiale cu sau fără obiectul de prehensat (vezi Figurile 4 si 5) Modelulmecanic al macircinii artificiale are 16 grade delibertate şi a fost creat studiind icircn paralelsistemul de acţionare sistemul senzorial şi cel decomandă şi control [11]Sistemul de comandă şi control al uneiproteze de ultimă generaţie trebuie să respecteurmătoarele condiţii1048633 Să aibă icircn centru computerul1048633 Să permită o integrare facilă a uneimari varietăţi de senzori şi actuatori1048633 Să permită portabilitatea protezei(funcţionarea independentă decomputer)1048633 Să aibă un preţ de cost competitiv
După un studiu complet al soluţiilorsimilare icircntacirclnite icircn cadrul sistemelor de controlale macircinilor robotice sau protezelor s-a deciscombinarea computerului cu o placă de achiziţieşi comandă dotată cu microprocesor care săcomande precis servomotoarele de curentcontinuu ale fiecărui deget Arborii de ieşire aicelor cinci servomotoare care acţioneazădegetele macircinii artificiale vor fi legaţi mecanicde falanga distală a fiecărui deget prinintermediul transmisiilor prin cabluridirecţionate pe fuliile fiecărei falange [12 si 13]Totodată sistemul de comandă şi controlal macircinii artificiale are rolul de a procesainformaţiile culese de senzori de proximitate şi de forţă (vezi Figurile 2 si 3)
Figura 2 ndash Modelul 3D rezultat schema cinematică şi acţionarea unui deget al macircinii artificiale Figure 2 ndash The resulted three-dimensional model of the hand the kinematic layout and the drivesystem of a finger
Control board Fingers actuators Wrist actuator Thumb actuator Proximity sensor
Figura 3 ndash Sistemul macircnă-antebraţ şi componentele sale Figure 3 ndash The hand-arm assembly and thecomponents
The system works according to a presetprogram implemented in the microcontrollerinternal memory The program is written in Cprogramming language into computer whichcommunicates with the acquisition board viaan USB A-B cable The prosthesis isequipped with five FSR sensors (one for eachphalange) for measuring the force betweenhand elements (phalanxes palm) and graspedobject The information from the FSR sensorsare used to limit or to augment the graspingforce in relation to the nature of the externalobject If the measured force exceeds athreshold value then the control systemcommands the fingers to loosen a bit theobject This control strategy may be appliedwhen the user manipulates soft or fragileobjects (for example eggs chips grapes etc)By contrast if the measured force is smallerthan the threshold value stored in the
Sistemul funcţionează conform unuialgoritm memorat de placa de comandă şicontrol Acest algoritm este scris icircn limbajulde programare CC++ pe computer şi icircncărcaticircn placa de achiziţie şi comandă prinintermediul unui cablu USB A-B Protezaeste echipată cu cinci senzori de fortă de tipFSR (Force Sesitive Resistor) cacircte unulpentru fiecare falangă distală a degetelorInformaţia culeasă de aceşti senzori estefolosită icircn scopul limitării sau augmentăriiforţei de stracircngere pe care o dezvoltăprehensorul asupra obiectului Dacă forţamăsurată depăşeşte o valoare prestabilităatunci sistemul de comandă şi control vaemite comenzi către actuatori astfel icircncacirctforţa de stracircngere a obiectului să sediminueze Această strategie de control poatefi aplicată atunci cacircnd utilizatorul manevrează obiecte fragile (de exemplu ouă
microcontroller memory then the controlsystem can command a tighter gripAnother sensor used for this prostheticdevice is an ultrasonic proximity sensorwhich measures the distance to the object thatis going to be grasped This sensor is locatedin the prosthesis palm If the distancebetween palm and object is smaller than forexample 3cm then if desired the hand willgrasp the object
chipsuri struguri roşii etc) Invers dacă forţamăsurată este mai mică decacirct valoareaprestabilită icircn algoritmul de control atuncisistemul de control va comanda o stracircngeremai fermăUn alt senzor utilizat are rolul de amăsura distanţa pacircnă la obiectul de prehensatAcest senzor este de tip ultrasonic şi estedispus icircn palma macircinii artificiale Dacădistanţa dintre palmă şi obiect este mai micădecacirct de exemplu 3 cm atunci macircnaartificială va prinde obiectul
Figura 5 ndash Simulări ale prizei de precizie (monedă stacircnga şi macircner dreapta) Precision graspsimulation (coin left and handle right)
4 FabricationThe execution drawings have beencreated from the CAD virtual models ofthe parts This is one of the majoradvantages of working with CADsoftware Afterwards the fabricationprocess of the parts has begun Thematerial chosen for this application is analuminum alloy The method of fabrication is based on traditional metalmachining stages such as lathing drillingetcThe fingers of the hand have amodular construction a finger assemblyhaving 12 parts 3 phalanxes 6 pulleysand 3 bolts as shown in Figure 6
4 Fabricaţia primului prototipDesenele de execuţie ale pieselor ceconstituie macircna artificială au fost create directdin softul de dezvoltare SolidWorks Acestareprezintă unul dintre marile avantaje alelucrului cu acest tip de softuri După aceastăetapă procesul de fabricaţie al pieselor a icircnceputMaterialul ales pentru primul prototip(aliaj de aluminiu) asigură o masă redusă şi rezistenţă mecanică adecvată aplicaţiei Metodade fabricaţie este una tradiţională prin aşchiere şicuprinde etape ca strunjire frezare alezarerectificare etcDegetele macircinii artificiale au construcţiemodulară un deget fiind compus din 12 piesetrei falange şase fulii şi trei bolţuri aşa cum esteilustrat in Figura 6
Figura 6 ndash Modelul virtual vs prototipul de deget Figure 6 ndash The virtual finger (left) vs fabricatedfinger (right)
The overall dimensions of the resultedhand prototype are very close to those of anaverage size human hand (see Figures 7 and8) Therefore the main characteristic of thisartificial hand is a high degree ofanthropomorphism
Dimensiunile rezultate pentru pieselecare compun prototipul de macircnă mecanicăsunt foarte apropiate de cele ale macirciniiumane Icircn Figurile 7 şi 8 se poate vizualizaprototipul de macircnă mecanică şi o comparaţieicircntre acesta şi o macircnă umană de dimensiunimedii
Figura 7 ndash Prototipul rezultat (vedere dorsală) Figura 8 ndash Comparaţie macircna artificială - macircna umanăFigure 7 ndash The assembled hand (dorsal view) Figure 8 ndash The assembled hand (palm view)
7 ConclusionsThe artificial hand presented in thispaper is the second one developedentirely at the Faculty of MechanicsUniversity of Craiova under the PhDprogramme calledrdquoAcknowledgementsregarding the mechanical prehensionsystemsrdquo The applications of this newdeveloped artificial hand can be found inrobotics (as an end-effector for industrialor humanoid robot) in medical prostheticfield (as a human hand or upper limbprosthesis) or in universities as anexperimental tool to study the graspingprocess
7 ConcluziiMacircna artificială prezentată icircnaceastă lucrare este a doua dezvoltatăintegral icircn cadrul Facultăţii de Mecanicădin Craiova icircn cadrul tezei de doctoratintitulate bdquoContribuţii la studiulsistemelor mecanice de prehensiunerdquoAplicaţiile acestei noi macircini mecaniceantropomorfe pot fi găsite icircn robotică (caşi end-effector pentru roboţii industrialisau humanoizi) icircn domeniul medical (caşi proteză pentru macircnă sau membrulsuperior uman) sau chiar icircn domeniuluniversitar ca şi instrument pentru studiulprocesului complex al prehensiunii
9 Bibliography1 Jacobsen S C Iversen E KKnutti DF Johnson RTBiggers KB ndash ldquoDesign of theUtah-MIT Dexterous Handrdquo ProcIEEE International Conference onRobotics and Automation April 7-10 19862 Kargov A Asfour T PylatiukC Oberle R Klosek HSchulz S Regenstein KBretthauer G - Development ofan Anthropomorphic Hand for aMobile Assistive Robot IEEE 9th
International Conference onRehabilitation Robotics Frontiersof the Human-Machine InterfaceChicago Illinois USA June 28-July 1 20053 Shadow Robot Company Designof a Dextrous Hand for AdvancedCLAWAR Applications Availablefromhttpwwwshadowrobotcomdownloadsdextrous_hand_finalpdf
4 Butterfass J Grebenstein MLiu H Hirzinger G - DLRHand II Next Generation of aDextrous Robot Hand In ProcIEEE Int Conf on Robotics andAutomation 01 ICRA 01SeoulKorea May 21-26 20015 Kawasaki H Shimomura HShimizu Y - Educationalindustrialcomplex development ofan anthropomorphic robot handGifu hand Advanced RoboticsVol 15 No3 pp 357-363 20016 Caffaz A Casalino GCannata G Panin G andMassucco E - ldquoThe DIST-HandAn Anthropomorphic FullySensorized Dexterous GripperrdquoIEEE Humanoids 2000 BostonSeptember 20007 Kaneko K Harada KKanehiro F - Development ofMulti-fingered Hand for Life-sizeHumanoid Robots Proceedings ofthe IEEE International Conferenceon Robotics and AutomationRoma Italy 10-14 April 20078 Sundar N ndash Dexterous RoboticHands Kinematics and ControlMIT Artificial IntelligenceLaboratory9 Stareţu I ndash Sisteme deprehensiune Editura Lux LibrisBraşov 199610 wwwtouchbionicscom11 Berceanu C Tarniţă D - Anew fabrication method for acomputer controlled artificialhand with electric actuatorsInternational Journal of ModernManufacturing Technologies(IJModTech) Vol I pp 13-17ISSN 2067-3604 200912 Berceanu C Tarnita DDumitru S Filip D - Forwardand Inverse KinematicsCalculation for anAnthropomorphic Robotic Finger
ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010

should be developed by comparison withthe human hand which possesses only atthe phalanxes level 19 DOF [9]All around the word the scientist aretrying to solve one of the most complexproblems the replacement of a humanbody part The artificial device who willreplace the defective body part must beable to function a long period of timewithout servicing In particular aprosthetic device for the human hand orupper limb is mandatory to respect thefollowing prerequisites human friendly interms of general performance (forcecapabilities proprioceptive abilitiesmovement replication etc) aestheticsand of course it must be cost effectiveMany companies are producing suchdevices for patients in need but the costof a modern prosthetic device is highenough so only some wealthy patientsbenefit from these latest achievementsOne of these companies is TouchbionicsInc which produces the i-Limb prostheticdevice i-Limb is considered one of themost technological easy to live withprosthetic device ever created not only bythe patients who tried or used the i-Limbbut also by the medical staff This anthropomorphic handpossesses five fingers each with twophalanxes (the degree of freedom for themechanism of the hand is M = 11) Teactuation is made by five DC motorsplaced in the palm Working as prostheticdevice is enabled by two electrodesbonded to the patient skin which collectthe myoelectric signals from the musclesand transmit these signals together withthe information from the sensors to amicroprocessor Although modern by allmeans the i-Limb prosthetic device is avery expensive one This we consideredto be a major shortcoming and challenged
cacirct mai apropiate de cele ale macircinii umanesistem senzorial modern estetică masă redusăinterfaţă de comandă şi control simplă şiintuitivă şi replicarea cacirct mai fidelă a mişcărilormacircinii umane Ultima condiţie poate fiicircndeplinită doar prin conceperea unui modelmecanic cu suficiente grade de libertate modelmecanic construit prin similitudine cu modelulanatomic al macircinii umane De aceea modelulmecanic al unui asemenea produs trebuie săconţină doar la nivelul falangelor 19 grade delibertate [9]O problemă stringentă cu care se confruntăcercetătorii din icircntreaga lume este aceea aicircnlocuirii unei părti a corpului umanComponenta artificială care substituiecomponenta anatomică va trebui să fie proiectatăastfel icircncacirct să funcţioneze o lungă perioadă detimp fără alte intervenţii Icircn particular o protezăpentru macircnă sau membru superior trebuie sărespecte următoarele deziderate să aibăperformanţe funcţionale bune (forţe dezvoltategamă de mişcări sistem senzorial etc) să fieadaptabilă corpului pacientului să aibă o esteticăapropiată de aceea a macircinii umane şi să fieaccesibilă
the team of the Faculty of MechanicsCraiova to create a low cost modern easyto install and live prosthetic device 3 CAD model and simulationsIn the pursuit of constructing such acomplex product we have studied all thesimilar solutions in terms of designactuation systems sensors embeddedcontrol and materialsWe started by creating a threedimensionalmodel of the prosthesis using SolidWorks CAD software which allowedus to perform simulations with theclosingopening of the fingers with orwithout object grasping (see Figures 4 and5) The three-dimensional of the artificialhand which comprises 16 DOF wasdeveloped in relation to the actuationsystem and control system [11]The control system of a modernprosthetic device has to respect thefollowing goals1048633 To have in centre the computer1048633 To allow an easy integration ofthe sensors and actuators1048633 To permit prosthesis portability1048633 To be cost effectiveAfter a thorough study of the similarsolutions found in the control systems ofmany robotic or prosthetic hands wedecided to combine computer with anacquisition board equipped with amicrocontroller which commands the DCservomotors that drive the fingers Theoutput shaft of the five DC servomotorsthat actuate the fingers of the hand aremechanically connected with the distalphalanx (the tip of the finger) by means ofcable transmissions routed on the fingerspulleys [12 and 13] Proximity and forcesensors have been also included in thecontrol system of the prosthesis (seeFigures 2 and 3)
Multe companii produc la ora actualăasemenea produse pentru pacienţii cu amputaţiide macircnă sau membru superior icircnsă costul uneiproteze de ultimă generaţie este suficient deridicat astfel icircncacirct doar o mică parte a pacienţiloricircşi permit achiziţionarea acestui produs Unadintre companiile care produc proteze esteTouchbionics Inc Cel mai nou produs de acesttip al companiei (i-Limb) este considerat a fi unadintre cele mai avansate proteze pentru macircnă sau Proteza i-Limb posedă cinci degetefiecare cu cacircte două falange (gradul demobilitate al mecanismului protezei fiindM=11) Sistemul de acţionare cuprinde cincimotoare electrice de curent continuu plasate icircnpalmă şi cuplate cu transmisii prin cabluri şifuliiFuncţionarea ca şi proteză este permisă dedoi electrozi lipiţi pe pielea pacientului carecolectează semnalele mioelectrice ale muşchiloracestuia Deşi modernă din toate punctele devedere i-Limb este un produs inaccesibilmajorităţii pacienţilor cu amputaţii Preţul deachiziţie foarte ridicat reprezintă un maredezavantaj şi a determinat o echipă a Facultăţiide Mecanică din Craiova să demareze procesulde proiectare şi fabricare a unei proteze pentrumacircnă accesibile moderne şi performante3 Modelul CAD si simulăriS-a pornit de la crearea modeluluitridimensional al macircinii artificiale utilizacircndmediul de dezvoltare SolidWorks După aceastăetapă modelul tridimensional a fost importat icircnADAMS soft care a permis realizarea unorsimulări a comportamentului şi funcţionăriimacircinii artificiale cu sau fără obiectul de prehensat (vezi Figurile 4 si 5) Modelulmecanic al macircinii artificiale are 16 grade delibertate şi a fost creat studiind icircn paralelsistemul de acţionare sistemul senzorial şi cel decomandă şi control [11]Sistemul de comandă şi control al uneiproteze de ultimă generaţie trebuie să respecteurmătoarele condiţii1048633 Să aibă icircn centru computerul1048633 Să permită o integrare facilă a uneimari varietăţi de senzori şi actuatori1048633 Să permită portabilitatea protezei(funcţionarea independentă decomputer)1048633 Să aibă un preţ de cost competitiv
După un studiu complet al soluţiilorsimilare icircntacirclnite icircn cadrul sistemelor de controlale macircinilor robotice sau protezelor s-a deciscombinarea computerului cu o placă de achiziţieşi comandă dotată cu microprocesor care săcomande precis servomotoarele de curentcontinuu ale fiecărui deget Arborii de ieşire aicelor cinci servomotoare care acţioneazădegetele macircinii artificiale vor fi legaţi mecanicde falanga distală a fiecărui deget prinintermediul transmisiilor prin cabluridirecţionate pe fuliile fiecărei falange [12 si 13]Totodată sistemul de comandă şi controlal macircinii artificiale are rolul de a procesainformaţiile culese de senzori de proximitate şi de forţă (vezi Figurile 2 si 3)
Figura 2 ndash Modelul 3D rezultat schema cinematică şi acţionarea unui deget al macircinii artificiale Figure 2 ndash The resulted three-dimensional model of the hand the kinematic layout and the drivesystem of a finger
Control board Fingers actuators Wrist actuator Thumb actuator Proximity sensor
Figura 3 ndash Sistemul macircnă-antebraţ şi componentele sale Figure 3 ndash The hand-arm assembly and thecomponents
The system works according to a presetprogram implemented in the microcontrollerinternal memory The program is written in Cprogramming language into computer whichcommunicates with the acquisition board viaan USB A-B cable The prosthesis isequipped with five FSR sensors (one for eachphalange) for measuring the force betweenhand elements (phalanxes palm) and graspedobject The information from the FSR sensorsare used to limit or to augment the graspingforce in relation to the nature of the externalobject If the measured force exceeds athreshold value then the control systemcommands the fingers to loosen a bit theobject This control strategy may be appliedwhen the user manipulates soft or fragileobjects (for example eggs chips grapes etc)By contrast if the measured force is smallerthan the threshold value stored in the
Sistemul funcţionează conform unuialgoritm memorat de placa de comandă şicontrol Acest algoritm este scris icircn limbajulde programare CC++ pe computer şi icircncărcaticircn placa de achiziţie şi comandă prinintermediul unui cablu USB A-B Protezaeste echipată cu cinci senzori de fortă de tipFSR (Force Sesitive Resistor) cacircte unulpentru fiecare falangă distală a degetelorInformaţia culeasă de aceşti senzori estefolosită icircn scopul limitării sau augmentăriiforţei de stracircngere pe care o dezvoltăprehensorul asupra obiectului Dacă forţamăsurată depăşeşte o valoare prestabilităatunci sistemul de comandă şi control vaemite comenzi către actuatori astfel icircncacirctforţa de stracircngere a obiectului să sediminueze Această strategie de control poatefi aplicată atunci cacircnd utilizatorul manevrează obiecte fragile (de exemplu ouă
microcontroller memory then the controlsystem can command a tighter gripAnother sensor used for this prostheticdevice is an ultrasonic proximity sensorwhich measures the distance to the object thatis going to be grasped This sensor is locatedin the prosthesis palm If the distancebetween palm and object is smaller than forexample 3cm then if desired the hand willgrasp the object
chipsuri struguri roşii etc) Invers dacă forţamăsurată este mai mică decacirct valoareaprestabilită icircn algoritmul de control atuncisistemul de control va comanda o stracircngeremai fermăUn alt senzor utilizat are rolul de amăsura distanţa pacircnă la obiectul de prehensatAcest senzor este de tip ultrasonic şi estedispus icircn palma macircinii artificiale Dacădistanţa dintre palmă şi obiect este mai micădecacirct de exemplu 3 cm atunci macircnaartificială va prinde obiectul
Figura 5 ndash Simulări ale prizei de precizie (monedă stacircnga şi macircner dreapta) Precision graspsimulation (coin left and handle right)
4 FabricationThe execution drawings have beencreated from the CAD virtual models ofthe parts This is one of the majoradvantages of working with CADsoftware Afterwards the fabricationprocess of the parts has begun Thematerial chosen for this application is analuminum alloy The method of fabrication is based on traditional metalmachining stages such as lathing drillingetcThe fingers of the hand have amodular construction a finger assemblyhaving 12 parts 3 phalanxes 6 pulleysand 3 bolts as shown in Figure 6
4 Fabricaţia primului prototipDesenele de execuţie ale pieselor ceconstituie macircna artificială au fost create directdin softul de dezvoltare SolidWorks Acestareprezintă unul dintre marile avantaje alelucrului cu acest tip de softuri După aceastăetapă procesul de fabricaţie al pieselor a icircnceputMaterialul ales pentru primul prototip(aliaj de aluminiu) asigură o masă redusă şi rezistenţă mecanică adecvată aplicaţiei Metodade fabricaţie este una tradiţională prin aşchiere şicuprinde etape ca strunjire frezare alezarerectificare etcDegetele macircinii artificiale au construcţiemodulară un deget fiind compus din 12 piesetrei falange şase fulii şi trei bolţuri aşa cum esteilustrat in Figura 6
Figura 6 ndash Modelul virtual vs prototipul de deget Figure 6 ndash The virtual finger (left) vs fabricatedfinger (right)
The overall dimensions of the resultedhand prototype are very close to those of anaverage size human hand (see Figures 7 and8) Therefore the main characteristic of thisartificial hand is a high degree ofanthropomorphism
Dimensiunile rezultate pentru pieselecare compun prototipul de macircnă mecanicăsunt foarte apropiate de cele ale macirciniiumane Icircn Figurile 7 şi 8 se poate vizualizaprototipul de macircnă mecanică şi o comparaţieicircntre acesta şi o macircnă umană de dimensiunimedii
Figura 7 ndash Prototipul rezultat (vedere dorsală) Figura 8 ndash Comparaţie macircna artificială - macircna umanăFigure 7 ndash The assembled hand (dorsal view) Figure 8 ndash The assembled hand (palm view)
7 ConclusionsThe artificial hand presented in thispaper is the second one developedentirely at the Faculty of MechanicsUniversity of Craiova under the PhDprogramme calledrdquoAcknowledgementsregarding the mechanical prehensionsystemsrdquo The applications of this newdeveloped artificial hand can be found inrobotics (as an end-effector for industrialor humanoid robot) in medical prostheticfield (as a human hand or upper limbprosthesis) or in universities as anexperimental tool to study the graspingprocess
7 ConcluziiMacircna artificială prezentată icircnaceastă lucrare este a doua dezvoltatăintegral icircn cadrul Facultăţii de Mecanicădin Craiova icircn cadrul tezei de doctoratintitulate bdquoContribuţii la studiulsistemelor mecanice de prehensiunerdquoAplicaţiile acestei noi macircini mecaniceantropomorfe pot fi găsite icircn robotică (caşi end-effector pentru roboţii industrialisau humanoizi) icircn domeniul medical (caşi proteză pentru macircnă sau membrulsuperior uman) sau chiar icircn domeniuluniversitar ca şi instrument pentru studiulprocesului complex al prehensiunii
9 Bibliography1 Jacobsen S C Iversen E KKnutti DF Johnson RTBiggers KB ndash ldquoDesign of theUtah-MIT Dexterous Handrdquo ProcIEEE International Conference onRobotics and Automation April 7-10 19862 Kargov A Asfour T PylatiukC Oberle R Klosek HSchulz S Regenstein KBretthauer G - Development ofan Anthropomorphic Hand for aMobile Assistive Robot IEEE 9th
International Conference onRehabilitation Robotics Frontiersof the Human-Machine InterfaceChicago Illinois USA June 28-July 1 20053 Shadow Robot Company Designof a Dextrous Hand for AdvancedCLAWAR Applications Availablefromhttpwwwshadowrobotcomdownloadsdextrous_hand_finalpdf
4 Butterfass J Grebenstein MLiu H Hirzinger G - DLRHand II Next Generation of aDextrous Robot Hand In ProcIEEE Int Conf on Robotics andAutomation 01 ICRA 01SeoulKorea May 21-26 20015 Kawasaki H Shimomura HShimizu Y - Educationalindustrialcomplex development ofan anthropomorphic robot handGifu hand Advanced RoboticsVol 15 No3 pp 357-363 20016 Caffaz A Casalino GCannata G Panin G andMassucco E - ldquoThe DIST-HandAn Anthropomorphic FullySensorized Dexterous GripperrdquoIEEE Humanoids 2000 BostonSeptember 20007 Kaneko K Harada KKanehiro F - Development ofMulti-fingered Hand for Life-sizeHumanoid Robots Proceedings ofthe IEEE International Conferenceon Robotics and AutomationRoma Italy 10-14 April 20078 Sundar N ndash Dexterous RoboticHands Kinematics and ControlMIT Artificial IntelligenceLaboratory9 Stareţu I ndash Sisteme deprehensiune Editura Lux LibrisBraşov 199610 wwwtouchbionicscom11 Berceanu C Tarniţă D - Anew fabrication method for acomputer controlled artificialhand with electric actuatorsInternational Journal of ModernManufacturing Technologies(IJModTech) Vol I pp 13-17ISSN 2067-3604 200912 Berceanu C Tarnita DDumitru S Filip D - Forwardand Inverse KinematicsCalculation for anAnthropomorphic Robotic Finger
ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010

the team of the Faculty of MechanicsCraiova to create a low cost modern easyto install and live prosthetic device 3 CAD model and simulationsIn the pursuit of constructing such acomplex product we have studied all thesimilar solutions in terms of designactuation systems sensors embeddedcontrol and materialsWe started by creating a threedimensionalmodel of the prosthesis using SolidWorks CAD software which allowedus to perform simulations with theclosingopening of the fingers with orwithout object grasping (see Figures 4 and5) The three-dimensional of the artificialhand which comprises 16 DOF wasdeveloped in relation to the actuationsystem and control system [11]The control system of a modernprosthetic device has to respect thefollowing goals1048633 To have in centre the computer1048633 To allow an easy integration ofthe sensors and actuators1048633 To permit prosthesis portability1048633 To be cost effectiveAfter a thorough study of the similarsolutions found in the control systems ofmany robotic or prosthetic hands wedecided to combine computer with anacquisition board equipped with amicrocontroller which commands the DCservomotors that drive the fingers Theoutput shaft of the five DC servomotorsthat actuate the fingers of the hand aremechanically connected with the distalphalanx (the tip of the finger) by means ofcable transmissions routed on the fingerspulleys [12 and 13] Proximity and forcesensors have been also included in thecontrol system of the prosthesis (seeFigures 2 and 3)
Multe companii produc la ora actualăasemenea produse pentru pacienţii cu amputaţiide macircnă sau membru superior icircnsă costul uneiproteze de ultimă generaţie este suficient deridicat astfel icircncacirct doar o mică parte a pacienţiloricircşi permit achiziţionarea acestui produs Unadintre companiile care produc proteze esteTouchbionics Inc Cel mai nou produs de acesttip al companiei (i-Limb) este considerat a fi unadintre cele mai avansate proteze pentru macircnă sau Proteza i-Limb posedă cinci degetefiecare cu cacircte două falange (gradul demobilitate al mecanismului protezei fiindM=11) Sistemul de acţionare cuprinde cincimotoare electrice de curent continuu plasate icircnpalmă şi cuplate cu transmisii prin cabluri şifuliiFuncţionarea ca şi proteză este permisă dedoi electrozi lipiţi pe pielea pacientului carecolectează semnalele mioelectrice ale muşchiloracestuia Deşi modernă din toate punctele devedere i-Limb este un produs inaccesibilmajorităţii pacienţilor cu amputaţii Preţul deachiziţie foarte ridicat reprezintă un maredezavantaj şi a determinat o echipă a Facultăţiide Mecanică din Craiova să demareze procesulde proiectare şi fabricare a unei proteze pentrumacircnă accesibile moderne şi performante3 Modelul CAD si simulăriS-a pornit de la crearea modeluluitridimensional al macircinii artificiale utilizacircndmediul de dezvoltare SolidWorks După aceastăetapă modelul tridimensional a fost importat icircnADAMS soft care a permis realizarea unorsimulări a comportamentului şi funcţionăriimacircinii artificiale cu sau fără obiectul de prehensat (vezi Figurile 4 si 5) Modelulmecanic al macircinii artificiale are 16 grade delibertate şi a fost creat studiind icircn paralelsistemul de acţionare sistemul senzorial şi cel decomandă şi control [11]Sistemul de comandă şi control al uneiproteze de ultimă generaţie trebuie să respecteurmătoarele condiţii1048633 Să aibă icircn centru computerul1048633 Să permită o integrare facilă a uneimari varietăţi de senzori şi actuatori1048633 Să permită portabilitatea protezei(funcţionarea independentă decomputer)1048633 Să aibă un preţ de cost competitiv
După un studiu complet al soluţiilorsimilare icircntacirclnite icircn cadrul sistemelor de controlale macircinilor robotice sau protezelor s-a deciscombinarea computerului cu o placă de achiziţieşi comandă dotată cu microprocesor care săcomande precis servomotoarele de curentcontinuu ale fiecărui deget Arborii de ieşire aicelor cinci servomotoare care acţioneazădegetele macircinii artificiale vor fi legaţi mecanicde falanga distală a fiecărui deget prinintermediul transmisiilor prin cabluridirecţionate pe fuliile fiecărei falange [12 si 13]Totodată sistemul de comandă şi controlal macircinii artificiale are rolul de a procesainformaţiile culese de senzori de proximitate şi de forţă (vezi Figurile 2 si 3)
Figura 2 ndash Modelul 3D rezultat schema cinematică şi acţionarea unui deget al macircinii artificiale Figure 2 ndash The resulted three-dimensional model of the hand the kinematic layout and the drivesystem of a finger
Control board Fingers actuators Wrist actuator Thumb actuator Proximity sensor
Figura 3 ndash Sistemul macircnă-antebraţ şi componentele sale Figure 3 ndash The hand-arm assembly and thecomponents
The system works according to a presetprogram implemented in the microcontrollerinternal memory The program is written in Cprogramming language into computer whichcommunicates with the acquisition board viaan USB A-B cable The prosthesis isequipped with five FSR sensors (one for eachphalange) for measuring the force betweenhand elements (phalanxes palm) and graspedobject The information from the FSR sensorsare used to limit or to augment the graspingforce in relation to the nature of the externalobject If the measured force exceeds athreshold value then the control systemcommands the fingers to loosen a bit theobject This control strategy may be appliedwhen the user manipulates soft or fragileobjects (for example eggs chips grapes etc)By contrast if the measured force is smallerthan the threshold value stored in the
Sistemul funcţionează conform unuialgoritm memorat de placa de comandă şicontrol Acest algoritm este scris icircn limbajulde programare CC++ pe computer şi icircncărcaticircn placa de achiziţie şi comandă prinintermediul unui cablu USB A-B Protezaeste echipată cu cinci senzori de fortă de tipFSR (Force Sesitive Resistor) cacircte unulpentru fiecare falangă distală a degetelorInformaţia culeasă de aceşti senzori estefolosită icircn scopul limitării sau augmentăriiforţei de stracircngere pe care o dezvoltăprehensorul asupra obiectului Dacă forţamăsurată depăşeşte o valoare prestabilităatunci sistemul de comandă şi control vaemite comenzi către actuatori astfel icircncacirctforţa de stracircngere a obiectului să sediminueze Această strategie de control poatefi aplicată atunci cacircnd utilizatorul manevrează obiecte fragile (de exemplu ouă
microcontroller memory then the controlsystem can command a tighter gripAnother sensor used for this prostheticdevice is an ultrasonic proximity sensorwhich measures the distance to the object thatis going to be grasped This sensor is locatedin the prosthesis palm If the distancebetween palm and object is smaller than forexample 3cm then if desired the hand willgrasp the object
chipsuri struguri roşii etc) Invers dacă forţamăsurată este mai mică decacirct valoareaprestabilită icircn algoritmul de control atuncisistemul de control va comanda o stracircngeremai fermăUn alt senzor utilizat are rolul de amăsura distanţa pacircnă la obiectul de prehensatAcest senzor este de tip ultrasonic şi estedispus icircn palma macircinii artificiale Dacădistanţa dintre palmă şi obiect este mai micădecacirct de exemplu 3 cm atunci macircnaartificială va prinde obiectul
Figura 5 ndash Simulări ale prizei de precizie (monedă stacircnga şi macircner dreapta) Precision graspsimulation (coin left and handle right)
4 FabricationThe execution drawings have beencreated from the CAD virtual models ofthe parts This is one of the majoradvantages of working with CADsoftware Afterwards the fabricationprocess of the parts has begun Thematerial chosen for this application is analuminum alloy The method of fabrication is based on traditional metalmachining stages such as lathing drillingetcThe fingers of the hand have amodular construction a finger assemblyhaving 12 parts 3 phalanxes 6 pulleysand 3 bolts as shown in Figure 6
4 Fabricaţia primului prototipDesenele de execuţie ale pieselor ceconstituie macircna artificială au fost create directdin softul de dezvoltare SolidWorks Acestareprezintă unul dintre marile avantaje alelucrului cu acest tip de softuri După aceastăetapă procesul de fabricaţie al pieselor a icircnceputMaterialul ales pentru primul prototip(aliaj de aluminiu) asigură o masă redusă şi rezistenţă mecanică adecvată aplicaţiei Metodade fabricaţie este una tradiţională prin aşchiere şicuprinde etape ca strunjire frezare alezarerectificare etcDegetele macircinii artificiale au construcţiemodulară un deget fiind compus din 12 piesetrei falange şase fulii şi trei bolţuri aşa cum esteilustrat in Figura 6
Figura 6 ndash Modelul virtual vs prototipul de deget Figure 6 ndash The virtual finger (left) vs fabricatedfinger (right)
The overall dimensions of the resultedhand prototype are very close to those of anaverage size human hand (see Figures 7 and8) Therefore the main characteristic of thisartificial hand is a high degree ofanthropomorphism
Dimensiunile rezultate pentru pieselecare compun prototipul de macircnă mecanicăsunt foarte apropiate de cele ale macirciniiumane Icircn Figurile 7 şi 8 se poate vizualizaprototipul de macircnă mecanică şi o comparaţieicircntre acesta şi o macircnă umană de dimensiunimedii
Figura 7 ndash Prototipul rezultat (vedere dorsală) Figura 8 ndash Comparaţie macircna artificială - macircna umanăFigure 7 ndash The assembled hand (dorsal view) Figure 8 ndash The assembled hand (palm view)
7 ConclusionsThe artificial hand presented in thispaper is the second one developedentirely at the Faculty of MechanicsUniversity of Craiova under the PhDprogramme calledrdquoAcknowledgementsregarding the mechanical prehensionsystemsrdquo The applications of this newdeveloped artificial hand can be found inrobotics (as an end-effector for industrialor humanoid robot) in medical prostheticfield (as a human hand or upper limbprosthesis) or in universities as anexperimental tool to study the graspingprocess
7 ConcluziiMacircna artificială prezentată icircnaceastă lucrare este a doua dezvoltatăintegral icircn cadrul Facultăţii de Mecanicădin Craiova icircn cadrul tezei de doctoratintitulate bdquoContribuţii la studiulsistemelor mecanice de prehensiunerdquoAplicaţiile acestei noi macircini mecaniceantropomorfe pot fi găsite icircn robotică (caşi end-effector pentru roboţii industrialisau humanoizi) icircn domeniul medical (caşi proteză pentru macircnă sau membrulsuperior uman) sau chiar icircn domeniuluniversitar ca şi instrument pentru studiulprocesului complex al prehensiunii
9 Bibliography1 Jacobsen S C Iversen E KKnutti DF Johnson RTBiggers KB ndash ldquoDesign of theUtah-MIT Dexterous Handrdquo ProcIEEE International Conference onRobotics and Automation April 7-10 19862 Kargov A Asfour T PylatiukC Oberle R Klosek HSchulz S Regenstein KBretthauer G - Development ofan Anthropomorphic Hand for aMobile Assistive Robot IEEE 9th
International Conference onRehabilitation Robotics Frontiersof the Human-Machine InterfaceChicago Illinois USA June 28-July 1 20053 Shadow Robot Company Designof a Dextrous Hand for AdvancedCLAWAR Applications Availablefromhttpwwwshadowrobotcomdownloadsdextrous_hand_finalpdf
4 Butterfass J Grebenstein MLiu H Hirzinger G - DLRHand II Next Generation of aDextrous Robot Hand In ProcIEEE Int Conf on Robotics andAutomation 01 ICRA 01SeoulKorea May 21-26 20015 Kawasaki H Shimomura HShimizu Y - Educationalindustrialcomplex development ofan anthropomorphic robot handGifu hand Advanced RoboticsVol 15 No3 pp 357-363 20016 Caffaz A Casalino GCannata G Panin G andMassucco E - ldquoThe DIST-HandAn Anthropomorphic FullySensorized Dexterous GripperrdquoIEEE Humanoids 2000 BostonSeptember 20007 Kaneko K Harada KKanehiro F - Development ofMulti-fingered Hand for Life-sizeHumanoid Robots Proceedings ofthe IEEE International Conferenceon Robotics and AutomationRoma Italy 10-14 April 20078 Sundar N ndash Dexterous RoboticHands Kinematics and ControlMIT Artificial IntelligenceLaboratory9 Stareţu I ndash Sisteme deprehensiune Editura Lux LibrisBraşov 199610 wwwtouchbionicscom11 Berceanu C Tarniţă D - Anew fabrication method for acomputer controlled artificialhand with electric actuatorsInternational Journal of ModernManufacturing Technologies(IJModTech) Vol I pp 13-17ISSN 2067-3604 200912 Berceanu C Tarnita DDumitru S Filip D - Forwardand Inverse KinematicsCalculation for anAnthropomorphic Robotic Finger
ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010
După un studiu complet al soluţiilorsimilare icircntacirclnite icircn cadrul sistemelor de controlale macircinilor robotice sau protezelor s-a deciscombinarea computerului cu o placă de achiziţieşi comandă dotată cu microprocesor care săcomande precis servomotoarele de curentcontinuu ale fiecărui deget Arborii de ieşire aicelor cinci servomotoare care acţioneazădegetele macircinii artificiale vor fi legaţi mecanicde falanga distală a fiecărui deget prinintermediul transmisiilor prin cabluridirecţionate pe fuliile fiecărei falange [12 si 13]Totodată sistemul de comandă şi controlal macircinii artificiale are rolul de a procesainformaţiile culese de senzori de proximitate şi de forţă (vezi Figurile 2 si 3)
Figura 2 ndash Modelul 3D rezultat schema cinematică şi acţionarea unui deget al macircinii artificiale Figure 2 ndash The resulted three-dimensional model of the hand the kinematic layout and the drivesystem of a finger
Control board Fingers actuators Wrist actuator Thumb actuator Proximity sensor
Figura 3 ndash Sistemul macircnă-antebraţ şi componentele sale Figure 3 ndash The hand-arm assembly and thecomponents
The system works according to a presetprogram implemented in the microcontrollerinternal memory The program is written in Cprogramming language into computer whichcommunicates with the acquisition board viaan USB A-B cable The prosthesis isequipped with five FSR sensors (one for eachphalange) for measuring the force betweenhand elements (phalanxes palm) and graspedobject The information from the FSR sensorsare used to limit or to augment the graspingforce in relation to the nature of the externalobject If the measured force exceeds athreshold value then the control systemcommands the fingers to loosen a bit theobject This control strategy may be appliedwhen the user manipulates soft or fragileobjects (for example eggs chips grapes etc)By contrast if the measured force is smallerthan the threshold value stored in the
Sistemul funcţionează conform unuialgoritm memorat de placa de comandă şicontrol Acest algoritm este scris icircn limbajulde programare CC++ pe computer şi icircncărcaticircn placa de achiziţie şi comandă prinintermediul unui cablu USB A-B Protezaeste echipată cu cinci senzori de fortă de tipFSR (Force Sesitive Resistor) cacircte unulpentru fiecare falangă distală a degetelorInformaţia culeasă de aceşti senzori estefolosită icircn scopul limitării sau augmentăriiforţei de stracircngere pe care o dezvoltăprehensorul asupra obiectului Dacă forţamăsurată depăşeşte o valoare prestabilităatunci sistemul de comandă şi control vaemite comenzi către actuatori astfel icircncacirctforţa de stracircngere a obiectului să sediminueze Această strategie de control poatefi aplicată atunci cacircnd utilizatorul manevrează obiecte fragile (de exemplu ouă
microcontroller memory then the controlsystem can command a tighter gripAnother sensor used for this prostheticdevice is an ultrasonic proximity sensorwhich measures the distance to the object thatis going to be grasped This sensor is locatedin the prosthesis palm If the distancebetween palm and object is smaller than forexample 3cm then if desired the hand willgrasp the object
chipsuri struguri roşii etc) Invers dacă forţamăsurată este mai mică decacirct valoareaprestabilită icircn algoritmul de control atuncisistemul de control va comanda o stracircngeremai fermăUn alt senzor utilizat are rolul de amăsura distanţa pacircnă la obiectul de prehensatAcest senzor este de tip ultrasonic şi estedispus icircn palma macircinii artificiale Dacădistanţa dintre palmă şi obiect este mai micădecacirct de exemplu 3 cm atunci macircnaartificială va prinde obiectul
Figura 5 ndash Simulări ale prizei de precizie (monedă stacircnga şi macircner dreapta) Precision graspsimulation (coin left and handle right)
4 FabricationThe execution drawings have beencreated from the CAD virtual models ofthe parts This is one of the majoradvantages of working with CADsoftware Afterwards the fabricationprocess of the parts has begun Thematerial chosen for this application is analuminum alloy The method of fabrication is based on traditional metalmachining stages such as lathing drillingetcThe fingers of the hand have amodular construction a finger assemblyhaving 12 parts 3 phalanxes 6 pulleysand 3 bolts as shown in Figure 6
4 Fabricaţia primului prototipDesenele de execuţie ale pieselor ceconstituie macircna artificială au fost create directdin softul de dezvoltare SolidWorks Acestareprezintă unul dintre marile avantaje alelucrului cu acest tip de softuri După aceastăetapă procesul de fabricaţie al pieselor a icircnceputMaterialul ales pentru primul prototip(aliaj de aluminiu) asigură o masă redusă şi rezistenţă mecanică adecvată aplicaţiei Metodade fabricaţie este una tradiţională prin aşchiere şicuprinde etape ca strunjire frezare alezarerectificare etcDegetele macircinii artificiale au construcţiemodulară un deget fiind compus din 12 piesetrei falange şase fulii şi trei bolţuri aşa cum esteilustrat in Figura 6
Figura 6 ndash Modelul virtual vs prototipul de deget Figure 6 ndash The virtual finger (left) vs fabricatedfinger (right)
The overall dimensions of the resultedhand prototype are very close to those of anaverage size human hand (see Figures 7 and8) Therefore the main characteristic of thisartificial hand is a high degree ofanthropomorphism
Dimensiunile rezultate pentru pieselecare compun prototipul de macircnă mecanicăsunt foarte apropiate de cele ale macirciniiumane Icircn Figurile 7 şi 8 se poate vizualizaprototipul de macircnă mecanică şi o comparaţieicircntre acesta şi o macircnă umană de dimensiunimedii
Figura 7 ndash Prototipul rezultat (vedere dorsală) Figura 8 ndash Comparaţie macircna artificială - macircna umanăFigure 7 ndash The assembled hand (dorsal view) Figure 8 ndash The assembled hand (palm view)
7 ConclusionsThe artificial hand presented in thispaper is the second one developedentirely at the Faculty of MechanicsUniversity of Craiova under the PhDprogramme calledrdquoAcknowledgementsregarding the mechanical prehensionsystemsrdquo The applications of this newdeveloped artificial hand can be found inrobotics (as an end-effector for industrialor humanoid robot) in medical prostheticfield (as a human hand or upper limbprosthesis) or in universities as anexperimental tool to study the graspingprocess
7 ConcluziiMacircna artificială prezentată icircnaceastă lucrare este a doua dezvoltatăintegral icircn cadrul Facultăţii de Mecanicădin Craiova icircn cadrul tezei de doctoratintitulate bdquoContribuţii la studiulsistemelor mecanice de prehensiunerdquoAplicaţiile acestei noi macircini mecaniceantropomorfe pot fi găsite icircn robotică (caşi end-effector pentru roboţii industrialisau humanoizi) icircn domeniul medical (caşi proteză pentru macircnă sau membrulsuperior uman) sau chiar icircn domeniuluniversitar ca şi instrument pentru studiulprocesului complex al prehensiunii
9 Bibliography1 Jacobsen S C Iversen E KKnutti DF Johnson RTBiggers KB ndash ldquoDesign of theUtah-MIT Dexterous Handrdquo ProcIEEE International Conference onRobotics and Automation April 7-10 19862 Kargov A Asfour T PylatiukC Oberle R Klosek HSchulz S Regenstein KBretthauer G - Development ofan Anthropomorphic Hand for aMobile Assistive Robot IEEE 9th
International Conference onRehabilitation Robotics Frontiersof the Human-Machine InterfaceChicago Illinois USA June 28-July 1 20053 Shadow Robot Company Designof a Dextrous Hand for AdvancedCLAWAR Applications Availablefromhttpwwwshadowrobotcomdownloadsdextrous_hand_finalpdf
4 Butterfass J Grebenstein MLiu H Hirzinger G - DLRHand II Next Generation of aDextrous Robot Hand In ProcIEEE Int Conf on Robotics andAutomation 01 ICRA 01SeoulKorea May 21-26 20015 Kawasaki H Shimomura HShimizu Y - Educationalindustrialcomplex development ofan anthropomorphic robot handGifu hand Advanced RoboticsVol 15 No3 pp 357-363 20016 Caffaz A Casalino GCannata G Panin G andMassucco E - ldquoThe DIST-HandAn Anthropomorphic FullySensorized Dexterous GripperrdquoIEEE Humanoids 2000 BostonSeptember 20007 Kaneko K Harada KKanehiro F - Development ofMulti-fingered Hand for Life-sizeHumanoid Robots Proceedings ofthe IEEE International Conferenceon Robotics and AutomationRoma Italy 10-14 April 20078 Sundar N ndash Dexterous RoboticHands Kinematics and ControlMIT Artificial IntelligenceLaboratory9 Stareţu I ndash Sisteme deprehensiune Editura Lux LibrisBraşov 199610 wwwtouchbionicscom11 Berceanu C Tarniţă D - Anew fabrication method for acomputer controlled artificialhand with electric actuatorsInternational Journal of ModernManufacturing Technologies(IJModTech) Vol I pp 13-17ISSN 2067-3604 200912 Berceanu C Tarnita DDumitru S Filip D - Forwardand Inverse KinematicsCalculation for anAnthropomorphic Robotic Finger
ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010

Control board Fingers actuators Wrist actuator Thumb actuator Proximity sensor
Figura 3 ndash Sistemul macircnă-antebraţ şi componentele sale Figure 3 ndash The hand-arm assembly and thecomponents
The system works according to a presetprogram implemented in the microcontrollerinternal memory The program is written in Cprogramming language into computer whichcommunicates with the acquisition board viaan USB A-B cable The prosthesis isequipped with five FSR sensors (one for eachphalange) for measuring the force betweenhand elements (phalanxes palm) and graspedobject The information from the FSR sensorsare used to limit or to augment the graspingforce in relation to the nature of the externalobject If the measured force exceeds athreshold value then the control systemcommands the fingers to loosen a bit theobject This control strategy may be appliedwhen the user manipulates soft or fragileobjects (for example eggs chips grapes etc)By contrast if the measured force is smallerthan the threshold value stored in the
Sistemul funcţionează conform unuialgoritm memorat de placa de comandă şicontrol Acest algoritm este scris icircn limbajulde programare CC++ pe computer şi icircncărcaticircn placa de achiziţie şi comandă prinintermediul unui cablu USB A-B Protezaeste echipată cu cinci senzori de fortă de tipFSR (Force Sesitive Resistor) cacircte unulpentru fiecare falangă distală a degetelorInformaţia culeasă de aceşti senzori estefolosită icircn scopul limitării sau augmentăriiforţei de stracircngere pe care o dezvoltăprehensorul asupra obiectului Dacă forţamăsurată depăşeşte o valoare prestabilităatunci sistemul de comandă şi control vaemite comenzi către actuatori astfel icircncacirctforţa de stracircngere a obiectului să sediminueze Această strategie de control poatefi aplicată atunci cacircnd utilizatorul manevrează obiecte fragile (de exemplu ouă
microcontroller memory then the controlsystem can command a tighter gripAnother sensor used for this prostheticdevice is an ultrasonic proximity sensorwhich measures the distance to the object thatis going to be grasped This sensor is locatedin the prosthesis palm If the distancebetween palm and object is smaller than forexample 3cm then if desired the hand willgrasp the object
chipsuri struguri roşii etc) Invers dacă forţamăsurată este mai mică decacirct valoareaprestabilită icircn algoritmul de control atuncisistemul de control va comanda o stracircngeremai fermăUn alt senzor utilizat are rolul de amăsura distanţa pacircnă la obiectul de prehensatAcest senzor este de tip ultrasonic şi estedispus icircn palma macircinii artificiale Dacădistanţa dintre palmă şi obiect este mai micădecacirct de exemplu 3 cm atunci macircnaartificială va prinde obiectul
Figura 5 ndash Simulări ale prizei de precizie (monedă stacircnga şi macircner dreapta) Precision graspsimulation (coin left and handle right)
4 FabricationThe execution drawings have beencreated from the CAD virtual models ofthe parts This is one of the majoradvantages of working with CADsoftware Afterwards the fabricationprocess of the parts has begun Thematerial chosen for this application is analuminum alloy The method of fabrication is based on traditional metalmachining stages such as lathing drillingetcThe fingers of the hand have amodular construction a finger assemblyhaving 12 parts 3 phalanxes 6 pulleysand 3 bolts as shown in Figure 6
4 Fabricaţia primului prototipDesenele de execuţie ale pieselor ceconstituie macircna artificială au fost create directdin softul de dezvoltare SolidWorks Acestareprezintă unul dintre marile avantaje alelucrului cu acest tip de softuri După aceastăetapă procesul de fabricaţie al pieselor a icircnceputMaterialul ales pentru primul prototip(aliaj de aluminiu) asigură o masă redusă şi rezistenţă mecanică adecvată aplicaţiei Metodade fabricaţie este una tradiţională prin aşchiere şicuprinde etape ca strunjire frezare alezarerectificare etcDegetele macircinii artificiale au construcţiemodulară un deget fiind compus din 12 piesetrei falange şase fulii şi trei bolţuri aşa cum esteilustrat in Figura 6
Figura 6 ndash Modelul virtual vs prototipul de deget Figure 6 ndash The virtual finger (left) vs fabricatedfinger (right)
The overall dimensions of the resultedhand prototype are very close to those of anaverage size human hand (see Figures 7 and8) Therefore the main characteristic of thisartificial hand is a high degree ofanthropomorphism
Dimensiunile rezultate pentru pieselecare compun prototipul de macircnă mecanicăsunt foarte apropiate de cele ale macirciniiumane Icircn Figurile 7 şi 8 se poate vizualizaprototipul de macircnă mecanică şi o comparaţieicircntre acesta şi o macircnă umană de dimensiunimedii
Figura 7 ndash Prototipul rezultat (vedere dorsală) Figura 8 ndash Comparaţie macircna artificială - macircna umanăFigure 7 ndash The assembled hand (dorsal view) Figure 8 ndash The assembled hand (palm view)
7 ConclusionsThe artificial hand presented in thispaper is the second one developedentirely at the Faculty of MechanicsUniversity of Craiova under the PhDprogramme calledrdquoAcknowledgementsregarding the mechanical prehensionsystemsrdquo The applications of this newdeveloped artificial hand can be found inrobotics (as an end-effector for industrialor humanoid robot) in medical prostheticfield (as a human hand or upper limbprosthesis) or in universities as anexperimental tool to study the graspingprocess
7 ConcluziiMacircna artificială prezentată icircnaceastă lucrare este a doua dezvoltatăintegral icircn cadrul Facultăţii de Mecanicădin Craiova icircn cadrul tezei de doctoratintitulate bdquoContribuţii la studiulsistemelor mecanice de prehensiunerdquoAplicaţiile acestei noi macircini mecaniceantropomorfe pot fi găsite icircn robotică (caşi end-effector pentru roboţii industrialisau humanoizi) icircn domeniul medical (caşi proteză pentru macircnă sau membrulsuperior uman) sau chiar icircn domeniuluniversitar ca şi instrument pentru studiulprocesului complex al prehensiunii
9 Bibliography1 Jacobsen S C Iversen E KKnutti DF Johnson RTBiggers KB ndash ldquoDesign of theUtah-MIT Dexterous Handrdquo ProcIEEE International Conference onRobotics and Automation April 7-10 19862 Kargov A Asfour T PylatiukC Oberle R Klosek HSchulz S Regenstein KBretthauer G - Development ofan Anthropomorphic Hand for aMobile Assistive Robot IEEE 9th
International Conference onRehabilitation Robotics Frontiersof the Human-Machine InterfaceChicago Illinois USA June 28-July 1 20053 Shadow Robot Company Designof a Dextrous Hand for AdvancedCLAWAR Applications Availablefromhttpwwwshadowrobotcomdownloadsdextrous_hand_finalpdf
4 Butterfass J Grebenstein MLiu H Hirzinger G - DLRHand II Next Generation of aDextrous Robot Hand In ProcIEEE Int Conf on Robotics andAutomation 01 ICRA 01SeoulKorea May 21-26 20015 Kawasaki H Shimomura HShimizu Y - Educationalindustrialcomplex development ofan anthropomorphic robot handGifu hand Advanced RoboticsVol 15 No3 pp 357-363 20016 Caffaz A Casalino GCannata G Panin G andMassucco E - ldquoThe DIST-HandAn Anthropomorphic FullySensorized Dexterous GripperrdquoIEEE Humanoids 2000 BostonSeptember 20007 Kaneko K Harada KKanehiro F - Development ofMulti-fingered Hand for Life-sizeHumanoid Robots Proceedings ofthe IEEE International Conferenceon Robotics and AutomationRoma Italy 10-14 April 20078 Sundar N ndash Dexterous RoboticHands Kinematics and ControlMIT Artificial IntelligenceLaboratory9 Stareţu I ndash Sisteme deprehensiune Editura Lux LibrisBraşov 199610 wwwtouchbionicscom11 Berceanu C Tarniţă D - Anew fabrication method for acomputer controlled artificialhand with electric actuatorsInternational Journal of ModernManufacturing Technologies(IJModTech) Vol I pp 13-17ISSN 2067-3604 200912 Berceanu C Tarnita DDumitru S Filip D - Forwardand Inverse KinematicsCalculation for anAnthropomorphic Robotic Finger
ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010

microcontroller memory then the controlsystem can command a tighter gripAnother sensor used for this prostheticdevice is an ultrasonic proximity sensorwhich measures the distance to the object thatis going to be grasped This sensor is locatedin the prosthesis palm If the distancebetween palm and object is smaller than forexample 3cm then if desired the hand willgrasp the object
chipsuri struguri roşii etc) Invers dacă forţamăsurată este mai mică decacirct valoareaprestabilită icircn algoritmul de control atuncisistemul de control va comanda o stracircngeremai fermăUn alt senzor utilizat are rolul de amăsura distanţa pacircnă la obiectul de prehensatAcest senzor este de tip ultrasonic şi estedispus icircn palma macircinii artificiale Dacădistanţa dintre palmă şi obiect este mai micădecacirct de exemplu 3 cm atunci macircnaartificială va prinde obiectul
Figura 5 ndash Simulări ale prizei de precizie (monedă stacircnga şi macircner dreapta) Precision graspsimulation (coin left and handle right)
4 FabricationThe execution drawings have beencreated from the CAD virtual models ofthe parts This is one of the majoradvantages of working with CADsoftware Afterwards the fabricationprocess of the parts has begun Thematerial chosen for this application is analuminum alloy The method of fabrication is based on traditional metalmachining stages such as lathing drillingetcThe fingers of the hand have amodular construction a finger assemblyhaving 12 parts 3 phalanxes 6 pulleysand 3 bolts as shown in Figure 6
4 Fabricaţia primului prototipDesenele de execuţie ale pieselor ceconstituie macircna artificială au fost create directdin softul de dezvoltare SolidWorks Acestareprezintă unul dintre marile avantaje alelucrului cu acest tip de softuri După aceastăetapă procesul de fabricaţie al pieselor a icircnceputMaterialul ales pentru primul prototip(aliaj de aluminiu) asigură o masă redusă şi rezistenţă mecanică adecvată aplicaţiei Metodade fabricaţie este una tradiţională prin aşchiere şicuprinde etape ca strunjire frezare alezarerectificare etcDegetele macircinii artificiale au construcţiemodulară un deget fiind compus din 12 piesetrei falange şase fulii şi trei bolţuri aşa cum esteilustrat in Figura 6
Figura 6 ndash Modelul virtual vs prototipul de deget Figure 6 ndash The virtual finger (left) vs fabricatedfinger (right)
The overall dimensions of the resultedhand prototype are very close to those of anaverage size human hand (see Figures 7 and8) Therefore the main characteristic of thisartificial hand is a high degree ofanthropomorphism
Dimensiunile rezultate pentru pieselecare compun prototipul de macircnă mecanicăsunt foarte apropiate de cele ale macirciniiumane Icircn Figurile 7 şi 8 se poate vizualizaprototipul de macircnă mecanică şi o comparaţieicircntre acesta şi o macircnă umană de dimensiunimedii
Figura 7 ndash Prototipul rezultat (vedere dorsală) Figura 8 ndash Comparaţie macircna artificială - macircna umanăFigure 7 ndash The assembled hand (dorsal view) Figure 8 ndash The assembled hand (palm view)
7 ConclusionsThe artificial hand presented in thispaper is the second one developedentirely at the Faculty of MechanicsUniversity of Craiova under the PhDprogramme calledrdquoAcknowledgementsregarding the mechanical prehensionsystemsrdquo The applications of this newdeveloped artificial hand can be found inrobotics (as an end-effector for industrialor humanoid robot) in medical prostheticfield (as a human hand or upper limbprosthesis) or in universities as anexperimental tool to study the graspingprocess
7 ConcluziiMacircna artificială prezentată icircnaceastă lucrare este a doua dezvoltatăintegral icircn cadrul Facultăţii de Mecanicădin Craiova icircn cadrul tezei de doctoratintitulate bdquoContribuţii la studiulsistemelor mecanice de prehensiunerdquoAplicaţiile acestei noi macircini mecaniceantropomorfe pot fi găsite icircn robotică (caşi end-effector pentru roboţii industrialisau humanoizi) icircn domeniul medical (caşi proteză pentru macircnă sau membrulsuperior uman) sau chiar icircn domeniuluniversitar ca şi instrument pentru studiulprocesului complex al prehensiunii
9 Bibliography1 Jacobsen S C Iversen E KKnutti DF Johnson RTBiggers KB ndash ldquoDesign of theUtah-MIT Dexterous Handrdquo ProcIEEE International Conference onRobotics and Automation April 7-10 19862 Kargov A Asfour T PylatiukC Oberle R Klosek HSchulz S Regenstein KBretthauer G - Development ofan Anthropomorphic Hand for aMobile Assistive Robot IEEE 9th
International Conference onRehabilitation Robotics Frontiersof the Human-Machine InterfaceChicago Illinois USA June 28-July 1 20053 Shadow Robot Company Designof a Dextrous Hand for AdvancedCLAWAR Applications Availablefromhttpwwwshadowrobotcomdownloadsdextrous_hand_finalpdf
4 Butterfass J Grebenstein MLiu H Hirzinger G - DLRHand II Next Generation of aDextrous Robot Hand In ProcIEEE Int Conf on Robotics andAutomation 01 ICRA 01SeoulKorea May 21-26 20015 Kawasaki H Shimomura HShimizu Y - Educationalindustrialcomplex development ofan anthropomorphic robot handGifu hand Advanced RoboticsVol 15 No3 pp 357-363 20016 Caffaz A Casalino GCannata G Panin G andMassucco E - ldquoThe DIST-HandAn Anthropomorphic FullySensorized Dexterous GripperrdquoIEEE Humanoids 2000 BostonSeptember 20007 Kaneko K Harada KKanehiro F - Development ofMulti-fingered Hand for Life-sizeHumanoid Robots Proceedings ofthe IEEE International Conferenceon Robotics and AutomationRoma Italy 10-14 April 20078 Sundar N ndash Dexterous RoboticHands Kinematics and ControlMIT Artificial IntelligenceLaboratory9 Stareţu I ndash Sisteme deprehensiune Editura Lux LibrisBraşov 199610 wwwtouchbionicscom11 Berceanu C Tarniţă D - Anew fabrication method for acomputer controlled artificialhand with electric actuatorsInternational Journal of ModernManufacturing Technologies(IJModTech) Vol I pp 13-17ISSN 2067-3604 200912 Berceanu C Tarnita DDumitru S Filip D - Forwardand Inverse KinematicsCalculation for anAnthropomorphic Robotic Finger
ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010

Figura 6 ndash Modelul virtual vs prototipul de deget Figure 6 ndash The virtual finger (left) vs fabricatedfinger (right)
The overall dimensions of the resultedhand prototype are very close to those of anaverage size human hand (see Figures 7 and8) Therefore the main characteristic of thisartificial hand is a high degree ofanthropomorphism
Dimensiunile rezultate pentru pieselecare compun prototipul de macircnă mecanicăsunt foarte apropiate de cele ale macirciniiumane Icircn Figurile 7 şi 8 se poate vizualizaprototipul de macircnă mecanică şi o comparaţieicircntre acesta şi o macircnă umană de dimensiunimedii
Figura 7 ndash Prototipul rezultat (vedere dorsală) Figura 8 ndash Comparaţie macircna artificială - macircna umanăFigure 7 ndash The assembled hand (dorsal view) Figure 8 ndash The assembled hand (palm view)
7 ConclusionsThe artificial hand presented in thispaper is the second one developedentirely at the Faculty of MechanicsUniversity of Craiova under the PhDprogramme calledrdquoAcknowledgementsregarding the mechanical prehensionsystemsrdquo The applications of this newdeveloped artificial hand can be found inrobotics (as an end-effector for industrialor humanoid robot) in medical prostheticfield (as a human hand or upper limbprosthesis) or in universities as anexperimental tool to study the graspingprocess
7 ConcluziiMacircna artificială prezentată icircnaceastă lucrare este a doua dezvoltatăintegral icircn cadrul Facultăţii de Mecanicădin Craiova icircn cadrul tezei de doctoratintitulate bdquoContribuţii la studiulsistemelor mecanice de prehensiunerdquoAplicaţiile acestei noi macircini mecaniceantropomorfe pot fi găsite icircn robotică (caşi end-effector pentru roboţii industrialisau humanoizi) icircn domeniul medical (caşi proteză pentru macircnă sau membrulsuperior uman) sau chiar icircn domeniuluniversitar ca şi instrument pentru studiulprocesului complex al prehensiunii
9 Bibliography1 Jacobsen S C Iversen E KKnutti DF Johnson RTBiggers KB ndash ldquoDesign of theUtah-MIT Dexterous Handrdquo ProcIEEE International Conference onRobotics and Automation April 7-10 19862 Kargov A Asfour T PylatiukC Oberle R Klosek HSchulz S Regenstein KBretthauer G - Development ofan Anthropomorphic Hand for aMobile Assistive Robot IEEE 9th
International Conference onRehabilitation Robotics Frontiersof the Human-Machine InterfaceChicago Illinois USA June 28-July 1 20053 Shadow Robot Company Designof a Dextrous Hand for AdvancedCLAWAR Applications Availablefromhttpwwwshadowrobotcomdownloadsdextrous_hand_finalpdf
4 Butterfass J Grebenstein MLiu H Hirzinger G - DLRHand II Next Generation of aDextrous Robot Hand In ProcIEEE Int Conf on Robotics andAutomation 01 ICRA 01SeoulKorea May 21-26 20015 Kawasaki H Shimomura HShimizu Y - Educationalindustrialcomplex development ofan anthropomorphic robot handGifu hand Advanced RoboticsVol 15 No3 pp 357-363 20016 Caffaz A Casalino GCannata G Panin G andMassucco E - ldquoThe DIST-HandAn Anthropomorphic FullySensorized Dexterous GripperrdquoIEEE Humanoids 2000 BostonSeptember 20007 Kaneko K Harada KKanehiro F - Development ofMulti-fingered Hand for Life-sizeHumanoid Robots Proceedings ofthe IEEE International Conferenceon Robotics and AutomationRoma Italy 10-14 April 20078 Sundar N ndash Dexterous RoboticHands Kinematics and ControlMIT Artificial IntelligenceLaboratory9 Stareţu I ndash Sisteme deprehensiune Editura Lux LibrisBraşov 199610 wwwtouchbionicscom11 Berceanu C Tarniţă D - Anew fabrication method for acomputer controlled artificialhand with electric actuatorsInternational Journal of ModernManufacturing Technologies(IJModTech) Vol I pp 13-17ISSN 2067-3604 200912 Berceanu C Tarnita DDumitru S Filip D - Forwardand Inverse KinematicsCalculation for anAnthropomorphic Robotic Finger
ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010

7 ConclusionsThe artificial hand presented in thispaper is the second one developedentirely at the Faculty of MechanicsUniversity of Craiova under the PhDprogramme calledrdquoAcknowledgementsregarding the mechanical prehensionsystemsrdquo The applications of this newdeveloped artificial hand can be found inrobotics (as an end-effector for industrialor humanoid robot) in medical prostheticfield (as a human hand or upper limbprosthesis) or in universities as anexperimental tool to study the graspingprocess
7 ConcluziiMacircna artificială prezentată icircnaceastă lucrare este a doua dezvoltatăintegral icircn cadrul Facultăţii de Mecanicădin Craiova icircn cadrul tezei de doctoratintitulate bdquoContribuţii la studiulsistemelor mecanice de prehensiunerdquoAplicaţiile acestei noi macircini mecaniceantropomorfe pot fi găsite icircn robotică (caşi end-effector pentru roboţii industrialisau humanoizi) icircn domeniul medical (caşi proteză pentru macircnă sau membrulsuperior uman) sau chiar icircn domeniuluniversitar ca şi instrument pentru studiulprocesului complex al prehensiunii
9 Bibliography1 Jacobsen S C Iversen E KKnutti DF Johnson RTBiggers KB ndash ldquoDesign of theUtah-MIT Dexterous Handrdquo ProcIEEE International Conference onRobotics and Automation April 7-10 19862 Kargov A Asfour T PylatiukC Oberle R Klosek HSchulz S Regenstein KBretthauer G - Development ofan Anthropomorphic Hand for aMobile Assistive Robot IEEE 9th
International Conference onRehabilitation Robotics Frontiersof the Human-Machine InterfaceChicago Illinois USA June 28-July 1 20053 Shadow Robot Company Designof a Dextrous Hand for AdvancedCLAWAR Applications Availablefromhttpwwwshadowrobotcomdownloadsdextrous_hand_finalpdf
4 Butterfass J Grebenstein MLiu H Hirzinger G - DLRHand II Next Generation of aDextrous Robot Hand In ProcIEEE Int Conf on Robotics andAutomation 01 ICRA 01SeoulKorea May 21-26 20015 Kawasaki H Shimomura HShimizu Y - Educationalindustrialcomplex development ofan anthropomorphic robot handGifu hand Advanced RoboticsVol 15 No3 pp 357-363 20016 Caffaz A Casalino GCannata G Panin G andMassucco E - ldquoThe DIST-HandAn Anthropomorphic FullySensorized Dexterous GripperrdquoIEEE Humanoids 2000 BostonSeptember 20007 Kaneko K Harada KKanehiro F - Development ofMulti-fingered Hand for Life-sizeHumanoid Robots Proceedings ofthe IEEE International Conferenceon Robotics and AutomationRoma Italy 10-14 April 20078 Sundar N ndash Dexterous RoboticHands Kinematics and ControlMIT Artificial IntelligenceLaboratory9 Stareţu I ndash Sisteme deprehensiune Editura Lux LibrisBraşov 199610 wwwtouchbionicscom11 Berceanu C Tarniţă D - Anew fabrication method for acomputer controlled artificialhand with electric actuatorsInternational Journal of ModernManufacturing Technologies(IJModTech) Vol I pp 13-17ISSN 2067-3604 200912 Berceanu C Tarnita DDumitru S Filip D - Forwardand Inverse KinematicsCalculation for anAnthropomorphic Robotic Finger
ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010
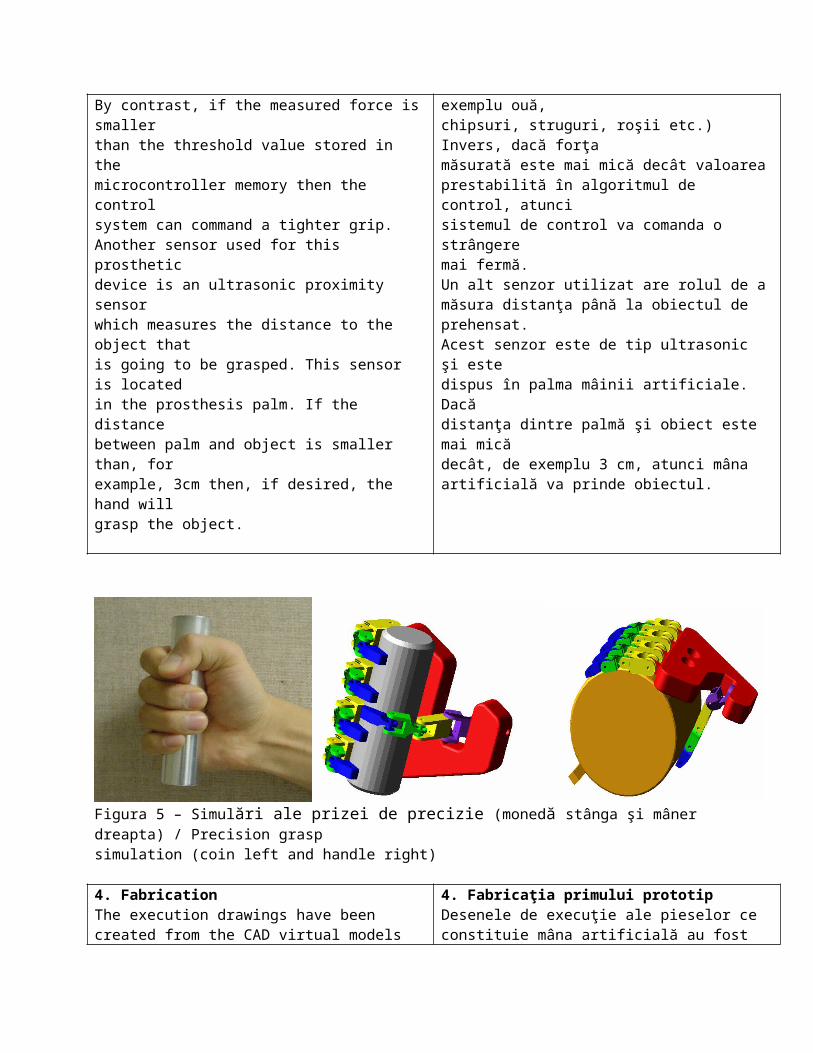
4 Butterfass J Grebenstein MLiu H Hirzinger G - DLRHand II Next Generation of aDextrous Robot Hand In ProcIEEE Int Conf on Robotics andAutomation 01 ICRA 01SeoulKorea May 21-26 20015 Kawasaki H Shimomura HShimizu Y - Educationalindustrialcomplex development ofan anthropomorphic robot handGifu hand Advanced RoboticsVol 15 No3 pp 357-363 20016 Caffaz A Casalino GCannata G Panin G andMassucco E - ldquoThe DIST-HandAn Anthropomorphic FullySensorized Dexterous GripperrdquoIEEE Humanoids 2000 BostonSeptember 20007 Kaneko K Harada KKanehiro F - Development ofMulti-fingered Hand for Life-sizeHumanoid Robots Proceedings ofthe IEEE International Conferenceon Robotics and AutomationRoma Italy 10-14 April 20078 Sundar N ndash Dexterous RoboticHands Kinematics and ControlMIT Artificial IntelligenceLaboratory9 Stareţu I ndash Sisteme deprehensiune Editura Lux LibrisBraşov 199610 wwwtouchbionicscom11 Berceanu C Tarniţă D - Anew fabrication method for acomputer controlled artificialhand with electric actuatorsInternational Journal of ModernManufacturing Technologies(IJModTech) Vol I pp 13-17ISSN 2067-3604 200912 Berceanu C Tarnita DDumitru S Filip D - Forwardand Inverse KinematicsCalculation for anAnthropomorphic Robotic Finger
ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010

ISI Proceedings of the 3rd
European Conference onMechanism Science EUCOMES2010 Cluj-Napoca RomaniaSeptember 14-18 2010 paperpublished in the book ldquoNewTrends in Mechanisms ScienceMechanisms and Controlrdquo editedby Springer13 Berceanu C Tarnita D -Mechanical Design and ControlIssues of a Dexterous RoboticHand submitted and accepted forISI Proceedings of 2010International Conference onOptimization of the Robots andManipulators Calimanesti-Caciulata Romania 28-30 May2010