psi_si
TRANSCRIPT

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 1/22
, Ouestion :
A partir desdonnees u texte ntroductifet desdocumentr echniquesDTI et DT2, compldtere
diagrammeASTdescriptif uROBDRwEdu document 6ponseDRl.
(Voir DRI)
P Ouestion2 t
On donne idessouse diagramme ADT niveauA-o (incomplet)du ROBDRIVE
a) Recopier urvotrecopie e dingramme ADT niveauA-o el compl6ter es zonesmanquantes.
b) Compl6tereszonesmanquantesu diagrammeADTniveauAodu document 6ponse R2.
a) SADT A-0
Gonsignes Programme
EnergieW) Trajectoire fil noy6)
Informations ur
ou utilisateur n le ROBDRIVE
position nitiale ot,
yoiitinrfrnafd
b) (Voir DR2)
1
(x,y,z),
ei
ir"--"t*q*.Ula mat "-ea'ine*iddu cylihdrtlitux,(, ,) Oigpdsseurl.hgstigeabie;ii Son entre tlrre*ie
O,dansabaseI , , Z) es t
M,'r,? 0 o
, ,,[+.*) oo o *
[*.*J
?CIBDR.fYE
[Io(cv')]=
5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 2/22
cokg,rEg Session2011Concours National
P€{Cyr}
(O,i) axede symdtriematdriellede rdvolutiondu cylindre(Cyr) donc :
(o., o o)
l to(cv,)]=l B., ol
Io o B", )6,9,11
Un point ourante Cyr)est elque OF=x i + y! + zZ
Ac r=I t t+22 ;dm= J
r r t cm=r t - Io *=M, . r , t
Pe(Cyr) Pe(Cy1)
8", &+ [ x'an, f i *ry, Lr2 p.t iv, l 2 12 :
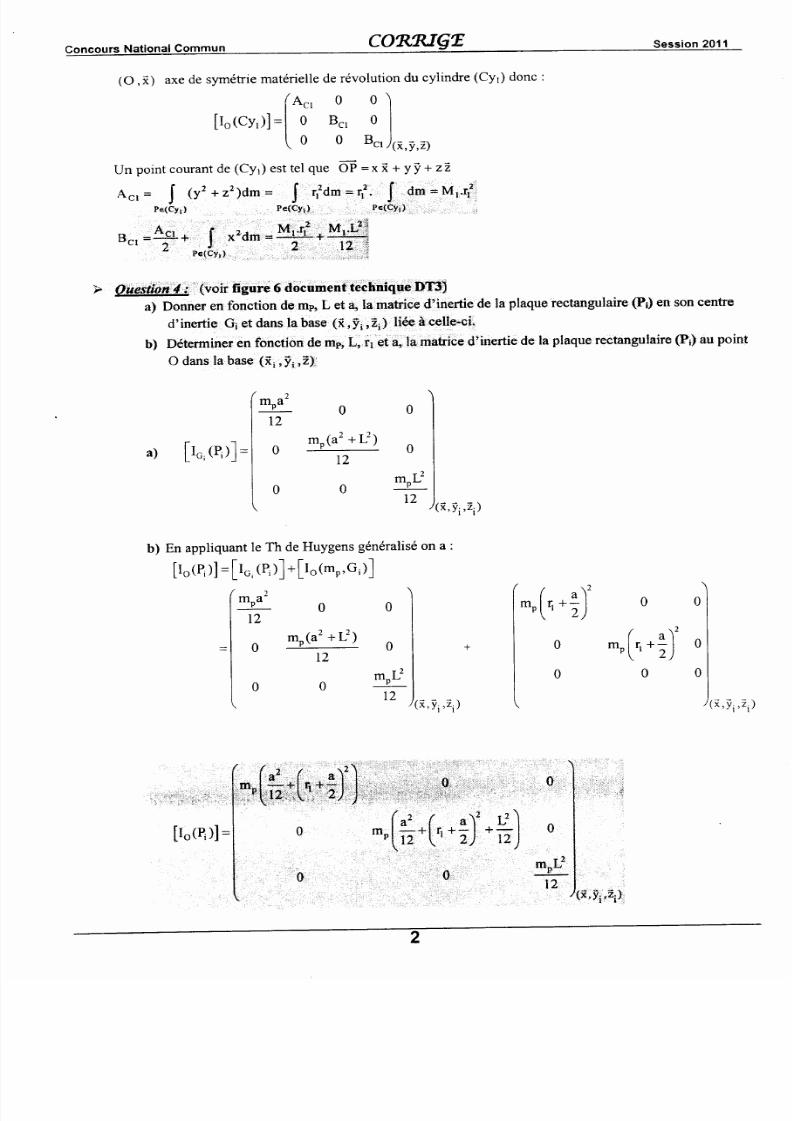
Ouestioi"1':':(voir
figure 6 dbcumenttdhnique DT3J
a) Donnerenfonctiondomp,L etq la matriced'inertie de a plaque ectangulairePr)en soncentre
d'inertie G; et dans a baso i , , ,Z, liee celle-ci.
b) D6terminer n fonctionde mp,L, 11 t aoa mahiie d'inertiede a plaque ectangulaireP) aupointO dansa base i, ,9i,Z)
^ru'
( i , i i , z i )
Iot'I'I
*'t' |T),
;711'i#frl,t|.i:',',',,',,,
(u ' , ( - . u ) ' , l ' )*'fo*[n*,)
")0
a) [to,(t,l] =
0
mo(a'+ f )
T2
0
I2
0
(u ' I u \ ' \
T'fni,l."",*) ,,0
0
-ot
12
b) En appliquante Th deHuygens 6ndralis6na :
lr"e, ] =[Io,p,]+[rotmo,c,]
m^at0
T2
m ^ ( a 2 f )n P ' ' , n
l 2
tot'
oo-" (7,t i ,z i)
r 1 l l l i , '' : i :
lto(q]=
t 't2
I a lm _ l n + - l
P [ ') |\ - /
0
0
', (n l)' o
00
x, i i ,z i )

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 3/22
Goncoursationarcommun COXR'IEE Session2011
a) Ddleminer enfonction de.& , C;et0; emomentd'inertie de aplaque PJ parrapport I'axe
(O,y) notd *(pi):
b) Ddterminer n fonctionde B; , C; et 0; e moment 'inertiede a plaque Pr)parrapportd I'axs(O,2) notd ""(Pi)"
a) I"r(4)=9,([Io({]trn]:Bi(t-qs0r]2c,(pin0g{! (! =cos0,, -sin0,z,)
b) *(ffi?i{tnfF.i}lfh$m$t}fffiC@tg (Z=sino,,+coso,,
Oaestion6:
a) Monkerque a matriee 'insrtiede ajante(s)= tCy,,Cy2rPlrPlrPrl aupointO dans abase
(i,y"Z)
estde.a for,mo
[o, o o')l r rcr]- l ,r R n I. l r n \ s r l - l v v s v I
i , , ."r. , : ! [htsl ]=lI
' ' " II o o c*,l1o,y,ry
Ddtermineresmoments 'inertiesAs , Bset C3oConclure.
(S)= {Cy,,Cyz,&,Pz,Pr admet eux lans esymdtrie at6rielleo ,i,2) et (o ,9 2)
.) As: L.(S): I"*(Cyr) L(Cyz)+ L.(Pr)+ L(Pz)+ Io*(Pr)
b)
a)
b)
i o , ,il!!r!{'{{r,{;fff'K&
Lt(Pr)' R , 3 C ,
^ . ( P ) l = r - 1 -" r ' " 1 0 , = ( t r / 2 ) + ( t r / 6 ) 4 4
, 3C,+̂
",6
ic; I
)yr)+ [r(Cyz)+ LlPr) + Ly(P2)
(P, 1, o= B, Io, P, = I
t "y(P3)I" r (P,)1 ,- -<orz>-<orst=T
++*)i",[+'.*J.;,",
.) Cs: L,(S): L,(Cyr) + Io,(Cy2) Io,(P1) L,(Pz)+ Io,(P3)
I" , (P,)= Io,(Pr) l r ,=oCi I", (P,) = Io, Pi lr,=rn,rr*rn,u,
I", P,= ", P,)1,=-L/2)-(n/6)=?.
?
' "' *j .*,(+.*l*]qn,c,)onc '=M'[?n) .1.2 rzt -
.) Conclusion On a Bs = C5 donc (O , ) est un axede sym6triematdriellede r6volutionde la
jante (S)= {Cy,,Cy2,P1,P2,P3}
_ 3 B i , C iA Aa i
. ) Bs : L (S ) :
I", (Pr
::i::
Donc B;1
3

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 4/22
Concours ational ommun coeKrEr Session2011
l l-2-Equilibraqe 'unerouedu ROBDRIVE
Traduireesdeuxconditions 'dquilibrage ynamiqueour 'ensembleE ={R, ,P,, P,r} enddduirees
quatredquations catairesiantmr , Int , 0t , 02et desdonndes6omdtriquestd'inertie.
SoitOp,, = Xr n + yr9n+ zr2* et 6f,F,, = Xz n + yz n + zr2*
o 1'* condition '6quilibragele cenhed'inertieGp de 'ensemble ={R, ,P,, Pr, doitetresur
l 'axede otationoR iR) donc ]ln'onG: = 0
lZ* .O*G,= 0
2"* condition d'6quilibrage l'axe de rotation (O* , * ) doit €treun axeprincipald'inertiede
I'ensembleE :{R , ,P,, P, ,} donc
= [ x y d m = F + m , x , y , + m r x r y , = oJ '
p e !
L=J
xzdm= E + m,x,z, rrrrxrz, 0p e !
Ouestion8:
Ddtermineresexpressionsesmasses 1et m2et desangles r et 02.
J * *O*mry r+mry r=0
[ -,r, * trrrz.- 0
J+*S1m,Pcos0 ,mrPcos0 , o ( l )
fm , l s i nO,+mrps inOr=0 , I (2 ) '
(3),i:,
(a).
fnllE "t-
(3)+(L/2)*(l)
(4)+(Ll2)*(2)
donne :
donne :
F+m* !d+ - ,Lpcos0 , =g
E+m,Lps in0 r=0
fffi$;;t4,:;;fpio*e,*olt-l',|,q:ltl , toit"oeo,
r \ 2r*mnfaJ
Alors tso,=2E
.t r, = |
2F+ m*Ld pL
. 1
.t E I^ z E lue meme ttru.= -d-z
2F _ m*Ld,-- - r
pL
4

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 5/22
'POuestion9:
a) D6terminerdans*base i,,f,), levect€urvitesserC,.Il0)enfonction deRet rf .
b) En exprimante roulement ansglissement upointdecontact11 ntre (Rr) et (0),ddterminer
dansabase i,,1,) levecteurvitess"C, e1l0)en fonctionde, a1 bl , ch,rl et 0r'
c) rEnexprimant e roulemeni glissem:t aupointde contact l entre(Rl) et (0), ddterminer
danslabasei , ,9 , ) levecteu iv i tesseC,.110)enfonct ionde ,a1 bl ,ch, ' i ret 0z'
(Q €1/o)=R\i'Yil
(C, . 1 0)=(A, . I / 0)+e{r I O)"
e,C,=F, e R, / 0)+ O-(R,0)n I,A]+ Olt O) ffi--=-
(uro,e o)=(A, e R, o))
(c , . t i 0)=(0,u,d,zo) r2o+\ i r2o(u , , -a ,yr )- -r0r i, + brrf , + at{r t
V(c, I / 0)=(u,,i nirr in , )x, +(u,ril rrp,os ;)f r"
c) De m0me :
(c, * 1 0!=(a,rii r<i4i**, )*'f {n i1 r1ii,gs 2)9r
Ouestion 0:
a) Ecriealorslesquatredquationsdiffdrentiel lesl iant,r,a1,br,ol ;h.,9r,0, et v .b) D{terminer n onction eR , a1et br, esangles ebraquager1 t o2 , commenter,
.l , Ug"*i"e* *fonrtloo aeR,i;,*i;,Uir;ff:et;,riil,leeivit€ssesngulaires i,,et 0r (V t o);
a)
a)
b)
| ",ri,+ r{r,sina,= 0 (1},;
Jo,rl-r<|,cosa,Rril (ri,i'l
",,i,r$,sina,=0 (3)
|t-(orri, r{r,coscr,) =nv (+}
I utri, rQr inu,=ar\i/ rQ, inc,
ou ]o,*-r0,cosut *(b, ' i '+rcirrcos*,)
ou.. . .
I atv+ rqrsrnot=u
I u,ri, r0,coset, fttf
. ' ; " . f l i j . ' " d r , ib) tBor
_;f,;tgcrz
n. q'
D'aprds leurs expressionses angles l,1 t u,2SontCOnStantSansce cas de plus ot ) oz
o, +G.(R.;J) 0 r=
(d 'ap rds (1 )e t (3 )0 ,e t4 ' r son t<d0 ,su r l eschdmao l€ to2son tpos i t i f s )
") N4"ntrer ue chaque xe(A,
,rr) passe ar e point fu'
b) DonneiSans alcul, esexpressionSesanglesa: et tr4etdesvitesses ngulairesQ, et 4'r'
c) Sachantuea1= 0.603m etb1=0.510 net o, e l-?5o,25"!calculere rayonminimalRo'inu
+!tt .(R-ht
cerclequepeutdderifee pointCl .

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 6/22
2011
a) Ona (Kn e l /0) =d doncK0representee ClRdumouvementde l) / d (0) doncondoit avoir
V(A ,e l /0 ) I e (KoA i ) V i
or Vie,e1/o) (A, eR; o)=
Donc chaqueaxe (A, , l, ) passear le point IQ.
-41
b) tgcs = -tgcrR + b t
_€l,
t gc l t= - tgc t r= -_E
c) Le rayonR estminimalquando1estmaximaldonc
tgctrur"*-
3L.
a
R*irr bt +tiLR-in - br lBdru"*
A.N
f*."t le graphedes iaisonsdu systdme esuspeasion;n
et sacaract6ristiqueeomdtrique
indiquera lairementa naturede chaqueiaison
' R*ru
Pivot (J ' i
Pivot glissant(Kti12)
Pivot (K ' I, )
Rotule M
COKRIEE
fG, . Ri / o)+ frR, / o)n [A.,=- rqi i.-------Y-
0
.;"1n
u; af+ R: u,
lV-1-Ghaines essol ides:
Rotule E
Rotule C
6

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 7/22
a 1u obilit6utiledusyst$mestmn l; quelle st votreavis ettemobilit6
U;nstimere degr€ emobilit6nteme u systdme,ndiquerlairemente ou esmouvements
concernes.
Ddterminere degr€d'hyperstatisme du systdme esuspension,onclure.
Quellessont escons6quencese a valeur deh sur e montage u systdme.
Onenvisageemodifier a iaison ntre 12b)et (1) parune iaison otuledecentre et a iaison
entre l2al et (11)parune otulede centreK. Quedeviente degr6demobilitddu systdme
Evaluer nouveaue degr6 'hlryerstatismeu systdme uisconclure,
aueUg J sans""f*f;
UiiaiSo* e4pivaieniea*x deux iaisonsen l ente, e *iangle inferieur(I0) et
ie chissis(l), quelestsondegrdd'hypeistatismeet commentpeutonrendrecette iaison
dquivalentesostatique
a) ffiu: I ; c'est la translation irculairede (2) par rapport (1)
le candidat peut aussidonner comme r6ponse la translationde (l2a) pat rapporte (12b)
suivant , ou |a rotationde (10)/ e (1) autourde (A,i,) ou la rotationde (11) / d (l ) autourde
(D, i r )
b) mi : 1 ; c'est la rotationde (2) autourde (BC)
c ) h = N , - 6 ( n - l ) + m a v e c :
Nbre d,incsstatiquesN, = 6* 3 + 2*5 +4 (6rotules, 2 pivots, 1 pivot glissant)
N r = 3 2
Nbre de solides n = 6
Mobilit6 m= mu 1 ffii= | + | = 2
Donc h:32- 30+ 2 h= 4 ; le systdme sthlperstatique'ordre 4.
d) Quatreconditions de montaged respecter'
e) La mobilit6 utile reste nchangdeDu: 1
,la mobilit6 interne devient rli: 3 : * rotation de (2) autour de (BC) ;
;::ilHi:ff3::ffi::lP,'N. = 8*3+ 4:28 (8rotules I pivotglissant)
h=N,-6(n-1) *m: 28 -30 + 4 h=2 ; lesystdmerestehyperstatiqueais vecmoins e
contraintes emontage.
f) Lcq(10/1) pivot d'axe (M,i,) ; hr-eo: ; pour rendrecette iaison6quivalentesostatiquel
suffit de remplacerpar exemple la liaison rotule en N par une lin6aire annulaired'axe (N,ir)
c)
d)e)
0
7

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 8/22
ConcoursNational ommun coKxrEE Session 011
lV-2-Etudeslatique4u svstdmqde suspension
Etablir egraphe 'analyse esactionsmdcaniques.Fluide rressort
GlissiCre ,,
Pivot (J , i
P ivo t Ar i , ) Pivot K, i , )
sar 0))
a) Monter que h rdsuliante e:llaetim m€ca4ique,'deatigle 12a)duv€rinde suspensionui le
triangle11)peut emettre ousa ormen]teu -+ I l) = Rrz"^r ,, (R,rrr1 stenvaleur
algdbrique).
b) Enappliquante h6oreme e Ia 6sultantetatique ta ige 12a)enprojection ur 2,, exprimerR12y11n onctiondeFu5,
c) Montrerque ar6sultante e I'actionmdcaniqueu triangle 10)sur a roue 2) peutsemettre
sousaforme R(10-+ 2)=Rrorz ,o (Rronestenvaleuralg6brique):
d) E app{iqiiint e thdordme U iioment,'statiQneupointC, i la roue 2) detenninerarelation
IiantR1672Pi fl et desdonndeseom6triques.
a) En solant 'ensemble6rin(V) ={l2a rl2b} et enant ompte eshypothdsese 1'6nonc6elui-ci
esten6quilibre ous 'actiondedeuxglisseurs
o, )={ ( t -+rzu)} et { r ( l + l2a)}={* t r -+rza)}
I o ), I o J*Donc esdeux orcesnlf - l2b) et nft t -+ 12a)sontdirectementppos6es,llesont a m€me
directionuiest adroiteJK) d'oi nitZa+ll)=-Ril l -+l2a)=Rnu^rZn
b) le TRSapplique a tige l2a) enprojectionur 2,, :) Zrr.Y,1na+l2a) =Q
3 Z,rRll | -+12a)+z,r-nlt2b -+l2a)+ Z,rR-@uideressort+ l}a) = Q\-------v- \---v+ +
- R t z , n t
3 -R,rur,, 4,e= 0 d'oir
R'rul t , -F* l
_ F ,
8

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 9/22
Session 01
c) De mdme u'ena) en solant e trianglenferieur10)celui-ciesten dquilibre ous 'actionde deux
forcesnlt - 10) et n(Z - 10) cesdeux orces ontdoncdirectementppos6eselles nt a
m0medirectionqui est a droite AB),
d'oir R(10 2) = -R(2 -+ l0 ) = Rrorzfio*
d) Le TMSappliqu6 (2 )aupointC = t"t.ft -+2)=(
lA-)r= Mc( I1 +2 )+M. (0+2 )+M. (10+2 )=0
:l-- C InR(0 >2 )+CBnR(10+2 )=0
cequidonne /r&,{*qgq*lle*f)_Sror1 =*Q
ffisembIe@)={2,11},ddterminerl,effortduvdrinF96e[fonctiondePi,a,petdesdonndes
g€omdtrique*r
Onapplique'ensembleE)= {Z,ff} leTMSaupoint : fvfole E;=[
= l,rJr.-+rr)+ffi0+Z)+ffiro+Z)+ffitzu+11)=[
;
? Di"nlo +2)+DE"n1ro+2)+DR"(tzu-+11)[
cequidonne /,oicoscr,-(Hcosp+6sinF)4,,0
d'ofi t r ;^ v C
Hcosp+6sin$i
a) Quelleest a directionduvecteur ites# frC, € 5 l), justifiervotre r6ponse'
b) Ddterminer raphiquemente vecteur itesse V(C, e S t; '
Ddtenninerraphiquementevecteur itesseV(Ar e 5 I).
D6terminer raphiquement,esvscteurs itesse frR, . 4b / 4a) et (A, e 4a ll), indiquer anormede
(voir DR3)
VI. ASSERVISSEMENTNVITESSE ESROUES
Vl-1 Etudem6canique r6liminaire
a) Ddterminere rapportde r6ductionn,= du rdducteur6picyclo?dal.
- (DD
b) Calculere rapportdordduction lobal n =;s.oJm
0ps
0);

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 10/22
concours ationalcommun COXXIEE session 011
a) Par rapport au porte satellite (PS) on a :
O(crps)=-Z^ -
-O(pslc)=
-rr ,=-Z^
olmrrsy Zc o1.rc; -o(psrc) o. -ops Zc
d 'o i t n , ='PS
=Z^
=1 ,'
olm z"+z* l:.
b) lerapport e 6ductionlobal st n= n,-trr= !'l J '
'POuestion21 :.
Sachant ue emomentd'inertiede I'arbremoteur A.) par apport r sonaxeestnotdJr, ddterminer
I'expr,essioadtm0idtOti*C*tU:gauiviitentnot6.tj&,de,'l*"osernble Crbremoteur (A",}+ r6ducteur
6picycloldat+ r€ducteur cyclo)ramend ur 'axede I'arbremoteur A').
L'6nergie in6tique e 'ensemblearbremoteur A-) + r6ducteur6picycloidal r6ducteurcyclo)est
l , ) - ) , r \ l t - 1 1 - r - \"
l - IE^= -{J-or; + J,.pois Jrcyoi
)=;(l ,nt;+ niJ,.o n'J,.,).t i ,
=
tr**t;
2\" ' ,
d'ou J.,.q= J'col + nf * + ntJ-
a) ExprimerV en onctionde o'r,,
b) D6terminer'dnergiecin6tique e,llensesbleX-*J danssonmouvement arrapportau sol (0),
a ) LeRSGaupo in t I ; ( I , eR , /0 )= [= (A , eR , /0 )+ IAnC I ]n , lO ;
Cequ idonne V:.+**;n,tq*
b) L'6nergie in6tique T(xn* o)=i(M"v2+4mv2aJ,,col)
Appliquer e th€ordme e 'dnergiecindtique ,l'ensembleXi"il dansso* mouvement arrapportau sol
(0) (Ondistingueralairementespuissancesesactionsm6caniquesxt6rieurest ntdrieures(Epo6)),
dr,rpuismontrerque '6quationobtenue eutsemettresous a formet le
?- C, C,, et indiquer es
expressionseJ6o tQa.
LeTECappliqu6l 'ensembleE)dans ontmvt/d 0)donne,*T(X*", /0)=Q-,(Xoor)+P'*(X*,0)dt4
P.o(X*oo)P(tR"blnou /0) = p1p"t Xnor / 0)+IP(0 -+ R, 0)-F..V =-F,.VY i - l
0 i - '
O (RSG)
p,* X*ou) 4C.ro.+3ri+"*0
tenantcompte e V =il.r.om on aura((fuf.* 4m)n2rz+4J,n,)co,rb,=4C*o, -nr!,co.
d'ou: ro ff =C* bn;
- ( v^ \ " ' n rF ,avec * = l
# tm ln ' r '+Jn e t Cn i - - - : '
\ ' ? )" : ' 4 r
10

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 11/22
Concours al Commun CORRIEE Session 011
Vl-2-Asservissement :
VI-2-1-Modhlisationdu moteur 6lectrique
Ecrirees ransformdeseLaplace esdquationsdgissante comportementumoteur lectriqueuis
indiqueresexpressionsitt6rales esransmittances1(p), z(p),B3(p) t Ba(p) uschdmaonctionnelsuivant i .a r - r
.) Les transform6esde Laplace des6quations dgissant e comportement du moteur sont :
u"g;Uip;iRitplJipr(p$ ;
E(p)*ltJ)*(p$ ;
.) Les ransmittances;(p) ont
rqt (P c;(p)rn;tpt* c;(pl
c*tij;kJ(pli
a) pour;;Oi;0 ,oetennineri ronctione ransfertumoteurM(p)=*S',
€crire ette
flonctionous a ormecanoniqug dtermineresexpressionsitt6rales eses onstantes
caract$ristiquesgainstatiqueK* pulsafion ropreo, et coefficientd'amortissement),puis aire
I'apgfiqpJlqn"qdritue,et'indig#,les-$ilitd#hlL M 5 .*Ut ***t*Ani*thatffiii{U*i #W#e#efi4(t}$ s * forme;!
B,(p)=R.rp
;
M(p)9,-!ol=
. lBz(p )=k ; Br$ )= : - - - - ;
f + J6q.pBn(P) k
avecT1etTz des 6els ositifs.U.(p) (t+lp)1t+T,p)
c) Onpeutd6finirpoure moteur eux onstantese emps:
Lt. = -- : constanteu emps lectriqueR
,, ='*S: constanteutemps dcaniquemR.f+ k'
.=g*(P)'= K*
Ainsi on peutapprocher a fonctiondetransfertM(p) n M$)re rs rvuvr :vr r s-.*-."^---
Calculeresvaleursnumdriques er* et t, puisvdrifierquecetteapproximation stvalable.
d) Donner 'allurede a,rdponser*(t)du moteur undchelon nitairede ensionu.(t) = u(t),
indiqueres valeursnumdriquesescaract6ristiquesecette 6ponse,
Br(p)
11

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 12/22
Concours NatlonalGommun coeelEs Session20 11
o /P)a) . ) M(P) =
- -m\ - =
U- (P)
k.) Gain statiqueK, = - r
---;: Pulsation ropre 61*=
k"+Rfi
BrB283
I + B,B"BrBo
Coeffrcientd' amortissement
.) A.N : K. = 3.8 ad.s-r.V'r
Ona t.. ' rr: 0.2421
Et re r-:0.000788
Doncvalable.
.22 1 ,l +_p* . p_
cOn cD;
IZ = *
z[F*nf RJ*+Lf RJ,o Lf
- 4
1 LJq k'+Rf Z,ttt*(k2+Rf)
r,ro35.833ad/s ; z= 4.2&
b)On a z>*i doncM(p) admetdeuxp6les 6els,alorsonpeut mettreM(p) sous a forme
M(p) '!o] = K.F/U . (p ) ( t+ r ,p ) ( t+T ,p )
T, RJ.^c) "=i=0.ool:r, r*=ff i=0.2388s,
L'approximationstvalable, It' + t' ! (rt + rt = 2z I (0n)
[."..".
! (Tr.T, Ilrrr. l)
et
et
! +T , =22161" 0 .2389
l . ! = l l i t rz ,=0.0007881
d) On a z > ll donc on a un rdgime ap6riodique:
4
3 .6
3 . 2 -
2.8, . .
2 . 4 -
2 t -
1 . 6
4 a
0 . 8 ,
0 . 4 .
0.8
Temps (sec)
o-(oo) :3.8 rad/s
1 " 6
12
<o'*(0)= 0
1 . 2

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 13/22
Concours NationalCommun coKerEE Session 011
rinera onctionehansfert .(p)=uffi,
montreru'on
s a ormeanoniqueH.(p)=offi
=frffi
, ndiqueres xpressions
litt6rales eK1et t; puis aire 'application umdriqueindiqueresunit6s).
. (p ) 1+B,BrBrBo (R+Lp)( f+Juop)+k '
-J-(r*holk '+R f \ . f
' ,
f + Juop
K, ( l + t ,p )
t . Y;' it:t p+ -l*r-oz (1+'p)(l+ 'P)
k '+R f k '+R f
r\vec K, = -j: , ., =
9
et r. et r. sontprecedemment6finies.' k '+R f ' ' f
A.N : Ki = 0.156 .V* = 0,156fl:l i ri = 3,33
Ouestion 7i
a),I-9,p.ghi6{,e*.charge u ermedg co-uq4.4},g$.l.tl.rpSpgg&,J.usti{ier,yotredponse.
n) vdrifi'blCnutiiilaiit la-courbetditctffid.elrie avaleurdu gainstatique( trouvde la question26.
a) En r6gime ransitoire,a rdponse r6sentenpic de courant e valeur yu*= 170A >> 20 A,
donc e cahierdescharge n ermedecourant stnon satisfait.
b) on a i(o) = lim i(t) = liq pl(p)= irqpHc(p)u-(p)= Iinl pHc(P)3 = Kiunt*
.. . .,p-+o p+u p-+u
P
i(co) 83.Ki 13A donc Ki" 3i$$*b'ffiAi$;t = $:156r ?
Ouestion 8:
a) On soumet e moteur un,€chelon e en$iorrd.'amplitudeU; (ur(t) = U'.u(t)), ddterminer n
fonctionde ( , Uo t* et ri la r6ponse(t) i cetto6chelon.
b) Quelles snt la valeur nitiale, a valeur inaleet lapente& 'originede a r6ponse(t) ?
c) PourU6= 83V,et tenant,,cgmptge*vglggd$:num$riqueseKi r tE et ti , repr€senterur a
figure 4;,ffildoc.umpnf;,i$ro* j*i6p e'i(rlid) Comparer a rdponse rdcddentefiguie b),:coneluie uantd I'approximationaite.
a)onaHc(p)I(p) - K'(l+ 'p) + r(p) li9l
t:l)u.(p)
u.(R) (l + r.p) (l + t.P)
u * ( t )=U" .u ( t ) u . (o ) =rJn lP donc:
D'ou i1t;,u.['
?,..'[;]J "tu

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 14/22
con"our" N"tion"tco,nrun COKQE s"""ion zott
/ \b) valeurnitiale i(0)*K,u"I r +{,tr. l=K,u*l ; valeurinale i(o)=KUn
\ t * ) t r ' *
i l 'originei(0)i-*,""[?]
c) A.N i(0)= 180.5 ; i(.o)=13A ; i '(0)= -704.7A.s-t--14010.2)pour e trac6 oir figure 14doc 6ponseDR3 .
e) Lesdeux 6ponsese essemblentotammentdsqu'ons'6loigne e = 0. D'autre art epic decourant ud6marragestde 180.5Avaleurprochede cellede a rdponse r6c6dente,onconpeutndgliger a constanteutemps6lectrique..
a) On supposear a suiteque e couple 6sistantC4 estnul, eton n5glige oujoursa constantedutemps6lectrique 6, rhontrer u'6npgut trnsformer le sch6maonctionnel e a figure c ainsi:
b) Indiquer'expressione a ransmittance sb).c) Ddtermineren fonctibnde$i ,f* eJ i, ie fonctiosdetransferten boucle ermdedecourant
t(p)Hrr,(p)=#ft,, indiqueron
v.(P)"ordreet d6terminera valeurnumdrique esongainstatiqueKBp;.
a) On appliqueau schdma locsde a figure c la transformation uivante
Ce qui donne e sch6masuivant :
t2-lconecter.lU'(P)
t2 lcorrecie". U.(FI -> l - , . I i
D'oi la transformationemandde., r, ,:
b) La transmittance5(p) st Br(p)= Ba(p).%(p)f .'L*;
rrp) C,(p).H.(p) _ (s p).H.(p)^ \ \ I J / ^ \ -
- \
V.(p) 1+C, p).H.(p).K,, l+(25 p).H.(p)= 5'H.(P)
p+ 25.H"(p)
14

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 15/22
Concoursationalcommun CO?$,IQE
ona H.(p)= r l ( ! ) .- I - ( , ( l+ t iP)
3 Ho",(p)=I(p)
=&U.(p) ( l+ t ,p)
- -gr '1 \F.rV.0)-p@
.) OrdredeHsrdp)est n o 2 ,songainstatique st,!
{T aKnr,i H"r,(0)=#* =1 / 5= 0.2A.V*r= 0.2e-r
t).I(i
d) Pendant e rdgime transitoire e courantaugmenteprogressivement, il n y a pas depic decourantdansce cas.En rdgime6tabli a valeuratteinteest 16.6A<20A, donc e cahierdeschargesen terme de courantest satisfait.
A noteraussiquecette dponse essemble celled'un systdme e premierordre.
Ouestiox 30:
a) Monter qu'on peut approcher a fonction de transf,e*Hsr,fu) i celle d,un systdmede premier
ordreH*(p)=rl(9).= , $"r, -i -
vc(PJ l+rBFi.pb) Ddtern*inei:€s.,valpursumdr.iqueq,e'I(e*atr$x fuoiquer.,lesnitds}{
a) Quandco+ 0 le diagrammede gain de Hsp;(p)admetune asymptotede pentenulle et celui dephaseadmetcommeasymptote o.
Quando -+ oo e diagrammede gain de Hsp;(p)admetune asymptotede pente -20dBld6cetceluide phaseadmetcommeasymptote 90".
Pour a pulsationde cassurea phasevaut -45oet l'6cart de la courbedu gainpar rapportauxasymptotes r3dB.
Donc on peut approcherHsp;(p)d celle d'un systdmede premier ordre.
b) H"r,(p) = -I(P) - K"o,V"(p) I + t"o,.p
.) 20.log(Ksp;)-l4dBaorc {;;j*ffiu*us,djn.v-t
.) pour rtl: l/rspi laphase aut45o donc sril,r'ile0.*,C,tte?'s.
Ouestion 1:
a) ' Enrrfgimepbrmnnen{onespeii toui cei asiervissement voirtoli= c01u t 11= 0" montrerquete gainde I'adaptateurdoit dtre el que Kf = (.1/nt
h) Transformere schimafonctionneldecetasso#issement ourIe meffresous a forme:
c) Indiquer 'expression eB(plj
En r6gimepermanent,on espdre our cetasservissementvoir o1 cD;" t er :0 ( urr= u.) iO n a u": K" . rrl1 et ur 1 Krr.oJ i (Kr1/n).c0.d'ot Kn= (Ka/n);
En appliquantau sch6ma locsde I'asservissementes deux ransformations uccessivesr Ddplacementdu point de prdldvementde O.(p) d droite ;o Puis rendre le sch6mad retour unitaire.
Et tenantcomptede la relatiot K. = (K.1/n),
on aboutitau sch6ma locsci-contre
O Bu&)*H;at$.aotp]
a)
b)

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 16/22
concours ationatGommun COKNEE Session2011
a) Quelleest a fonctionde ransfert n boucleouverteHsor(p) deI'asservissemente vitesse
b) La figure 15 du document 6ponseDR4 reprdsenteesdiagrammese Bode deHsol(p) non
corrigeeKr : l),
Indiquersur cedocumenta margedephaseMP6dusystdme, uelleestsavaleur?
Quelleest a margedu gainMG du qystdme
lndiquer surcedocrrmente gaiadu co*ecteurK16slnddcibel;pourrdgler a margede
phase u syst0me MPI = 45o indiquerde m6meMFr sur e document.
Calculeravaleur 6elle eK1.
c) Quelleestaprls csrrectiondu systdme,'eneurstatique *de I'asservissementun dchelon e
consigne evitesse 'amplitudeo6 ( toi.(t)= CIg.u(t))
d) La conectionproportionnelle atisfait lle ecahierdescharges n termede stabilit6etprecision
a
a
a
a) ;#qeoiiit'i' ?oN, .:(l + 0.01 7p)(l 3.33p).
b) Voir figure 15 document 6ponseDR3 ;.. MPo= l3o'j
. M$=oo i' Kts,n t2dB.:i
dl La stabtlitd stsatisfaits.&,conheapr€cision on*
'tOuestion33 :
a) Pour Q - 1, rappqter'effetdu cor,reeteur,L'sui a prCcision t la stabilitddu systdme.
b) OnchoisitK= 4 et T1* 20s",ustifiercs*hoixi
c) Quedevient a fonctionde 'ansferten boucleoulerteHsodp)du systdme,ndiquer onordre,son
gaiilet,fi*rd6ffi
/) Quelleestaprds orrection u systdmg 'erreurstatique de I'asservissementun dchelon eL
consigne e vitesssd'qrnplitudecoo,lcoir(t) rrro-u(il)
$ Sur a figure 16du document €ponseDR5,traceiesdiagralltmes rymptotiquesdeBodede
gainet de phasede a fonctionde ransferleaboucleouverteHeoz(p) u systdme,uis racera
courbe delledegainet indiquer urcedbcumenta m*rge dephase
Mfzdu systdme,
PourK. : 1 , le correcteurPI ameliore a prdcision d stabilit6 constante,
.) On choisitK. : Kr: 4, pour rdgler a margede phasedu systdme 45, c'est a valeurde K1
trouvded la question j9.
.) On choisit Ti = 20s car pour ne pas nfluencer la stabilit6 du systdme l faut que l/Ti << d la
pulsationde coupured 0 dB de a FTBO aprdsavoir rdgl6 a margede phase cD.r 60 radls).
c) Huoz$)= C,{p}36{P}=7Ax4x(1+20p) 14(1+20p)
, ;:r. ::;;1t1;i{';';.i"4i;ijtt::;:,,.:.1
i :,:,,. l:'' t
Ordre olfua(pl est
20p(10.0167p)(13,33p) p(I+0.0167pX13.33p)
a)
b)
d) Heor(p)estde classe doncQ = 0.

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 17/22
concours ationarcommun COgeIEg Session 011
e) Voir figure 16 document 6ponseDR4
La margedephaseeste nchangdeMPr'*MFr= 45o,
a) Le systdmeorrig6satisfaitl toutesesexigencesu cahierdescharges (Justifier)
b) D6terminere tempsderCponsel 5%o,etindiquere sur edocumentdponse.
c) A quelsystdme euton identifier a fonctionde ransfert n boucle ermeede I'asservissemen!
calculer es onstantesaractdristiques.onpourra otammenttiliser a figure f ci-dessous)
a) .) on a utilis6 un moteur asservisen courantqui assure il,,r*< 20 A
.) le correcteurPI assureune marge de phaseMPz = 45o et une erreur statique d un dchelon6, = 0 i
.) d'aprds a rdponse ndicielle figure 17 docDR5 le premierd6passementelatif estD1= 23%o ui
estbien nferieur d25%.
Donctoutes es exisences u cahierdescharges ontsatisfaites.
b) On trouvegraphiquement,5"a 0.104 s (=0.1s).
c) La fonctionde hansferten boucle erm6ede 'asservissementeut Ctre dentifi6ed un systdme e
secondordre :
.)
.)
.)
ot(.o): 1 : LKsp donc KaF* f i;
on a D1 23%o donc d'aprds a courbede
le premier d6passement lieu d l'instant
Donc 'r$'F?r3]#lli&
la igure de1'6nonc1s1 8.425
tr=0.048s! 0.05s) ---+rrl""r,1/l-zi,
""qF;A*'TF,
17

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 18/22
Concours NationalCommun corergr Session 011
DOCUMENT EPONSE R1
D6finir la position
du Robdrive dans
I'espace
Adapter e Robdrivela chargeet amortir
les oscillations
Transformer'6nergiem6canique e rotation
en ranslation uRobdrive
frAtsntettra
f*rwgizrnAcq1iAfi.t
au*or/d#*
18

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 19/22
ct)F
o(tto
ooE )
|l'
oo
o(J(!
CL.oo
uJ
tomotr
ql ,
.i:T\str:s
I
, q )
.{)50
q.)
k
r Q) :
\ gv r qql '!r
$F>\ \s
Q ., S i
S
I*
(Jq)'s
r Ltrl
a
Q qE 0)
6 H
().6)r
q
{.)
()
.CJ
rs):r
E,\#s:Fio. l
qr i
btil
boq)d
r Y l
.t!h
Q}:
i 'ssN
lsr
€:Q ]
:sis,Xi.kr*
Q rqsa)
\ss
n3
Fsq)
s\s
SpL.sU . L
:$EQ f i
q H
q ) H> t r
'F q)
t
& Hq
d .a?t Y ;.)3: I.| { '3
$ i to S : 7\ gE
.10q
A
O
rv 0)
= ?
o S
F C )
o vX F
g
9 l oE g; o.i5 trbro+=\t
QL
,i'ssfi
tr
Si
$,;Sr$'Hlx1: t l ; iUlrer ,
H,glSl
cq,
oEo
q r =. b6oE
co
€ _ { '
* $E; FFE- L _
F o o ' - -
flf FE5 1 ta
oC!
ot,o6'a
t{(tt
$oU
oo(It
oozo
oo
oo

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 20/22
ConcoursNational ommun con8,rEr Session 01
DOCUMENT EPONSE R3
Echelledesvitesses lmm + lmm/s
JustiJicationdes racds
a) (C, e5 I l) Id(BsCs) car85estleCIRdumouvemente 5) e (1).
b) Ona V(C, e5 l l) =(C, e6ll) carL(615)pivot Cr,Z,)
DemdmeV-1o, 7l\=l lp, e 6l l). L'6quiprojectivi t6appliqu6ed(6)
Dtq.V@t e6l1)= op, V1C,e611)Cequidonne C, e 5/t;,
(e, .5 / 1) eG5A5) carB5est e CIRdu mouvemente 5) d (1).
La m6thode u triangledesvitessesm6thode u CIR) appliqude (5) donne e, e S t;
( BsAs: BsA 's ; lluro,err)ll=llvo',srr)ll
O n a (R , . s r)=(e, . 5 4b)+(A, e4b 4a)+VlA,e 4a t)'----x-
(R , . 5 t) =(a, . 4b 4a)+ A, e4a t)\-----\-J \--Y- \-J
connu dedirection -L (OrA5)(o rAs )
cequidonneR, . 4b 4a) et (,e,, e4a t) ; ontrouvell(u, e+ul+a)[l 27 mm/s
. ,e7 l l )
v ( { e a a l l )
( A r e 5 / 1 )
*r-t
AI
:I
II
I
( . ,
V ( C r e 5 / 1
V(A* . 4b l4a
Figure13

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 21/22
concoursNationafommun COXR'fiEE s"""ion 2011
DOCUMENT EPONSE R4
t
T-
j-
l-
r.6
-
0
\
I
.ffi
-
--+
- l
I
t-
----f--:
\
I
\
o,o
=
a!L
3o(J
i(cof= 134
\(Dr0
'l
i
i
\
' i iI
sffi
\ l' \ f- ' :
- " :
. . : "_
02
--i
- 'a -:-
' i '
--T. '
:-
l - - :
\
\
:
,
-
LV V --
1 8 0 5 " - -\; \ : i
160l\-\ .
140F
\\120.----\\
\\
100 ' ' --i t
s0+i - - .
60r_l ' ' ' i ' - ; - -
40|=r
20- - . . : : .
00
aoF
30l--t -
201-
1 0 :
ni -
or r l
c - l u -
5"0,:_30[_
40f
-50f-
Pulsation (rad/sec)
21

5/7/2018 psi_si - slidepdf.com
http://slidepdf.com/reader/full/psisi 22/22
DOCUMENT EPONSE Rs
tc o i
0.05 1g'1 0.3 100
Pulsationrad/sec)
1 0 t6oro'
100
Pulsationrad/sec)
103
Figure16
Figure17