tentacle.netprophet/raspberrypi/raspberry...table of contents raspberry pi mechatronics projects...
TRANSCRIPT



RaspberryPiMechatronicsProjectsHOTSHOT

TableofContents
RaspberryPiMechatronicsProjectsHOTSHOT
Credits
AbouttheAuthors
AbouttheReviewers
www.PacktPub.com
Supportfiles,eBooks,discountoffers,andmore
Whysubscribe?
FreeaccessforPacktaccountholders
Preface
Whatthisbookcovers
Whatyouneedforthisbook
Whothisbookisfor
Conventions
Missionbriefing
Whyisitawesome?
YourHotshotobjectives
Missionchecklist
Task1
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Classifiedintel
Readerfeedback
Customersupport
Downloadingtheexamplecode
Downloadingthecolorimagesofthisbook
Errata
Piracy
Questions

1.HelloWorld
AquickintroductiontotheRaspberryPi
FeaturesofaRaspberryPi
WherecanIbuyaRaspberryPi?
RequirementstogetstartedwiththeRaspberryPi
OperatingsystemsontheRaspberryPi
GettingstartedwithRaspbian
DownloadingRaspbian
FlashingimageontotheSDcard
Windows
Linux
Acommand-lineinterface-basedapproach
IdentifyingtheSDcardmountpoint
UnmounttheSDcard
FlashtheSDcard
GUI-basedapproach
SettinguptheRaspberryPi
Missionbriefing
Whyisitawesome?
YourHotshotobjectives
Missionchecklist
Huntingandgathering
Engagethrusters
Objectivecomplete–minidebriefing
SettinguptheGPIO
Engagethrusters
InstallingGPIOlibraries
Objectivecomplete–minidebriefing
GPIOprogrammingusingPython
Engagethrusters
Analternativetoquick2wire–RPi.GPIO

Objectivecomplete–minidebriefing
Electricaloutputofourprogram
Engagethrusters
Objectivecomplete–minidebriefing
IntroductiontothePiCrust–aprototypingplatformfortheRaspberryPi
Missionaccomplished
Hotshotchallenge
2.ARaspberryWebIDEExample
Missionbriefing
Whyisitawesome?
YourHotshotobjectives
Missionchecklist
Installation,features,andusageoftheOccidentalisoperatingsystemfromAdafruit
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
SetupofaremoteloginintotheRaspberryPi
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
InstallationoftheRaspberryPiWebIDE
Engagethrusters
Objectivecomplete–minidebriefing
PythondevelopmentontheWebIDE
Prepareforliftoff
QuickintroductiontotheI2Cinterface
ConfiguringtheI2CinterfaceontheRaspberryPi
Engagethrusters
Objectivecomplete–minidebriefing
TestanddebuggingexamplesusingtheWebIDE
Prepareforliftoff

Engagethrusters
Objectivecomplete–minidebriefing
Missionaccomplished
Hotshotchallenge
3.TheArduinoRaspberryPiInterface
Missionbriefing
Whyisitawesome?
WherecanyoubuyanArduino?
YourHotshotobjectives
Missionchecklist
InstallingtheArduinoIDE
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
ProgrammingtheArduinousingtheRaspberryPi
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
RaspberryPiAlaMode
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
TheWeasleyweatherclock
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
ControllingthestepperusingtheArduino
Prepareforliftoff
Engagethrusters
Counterclockwiserotationofthesteppermotor
Objectivecomplete–minidebriefing

ControllingtheRGBLEDStripusingtheArduino
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
I2CCommunicationusingtheArduino(optional)
Prepareforliftoff
Engagethrusters
The7-Segmentdisplay
8x8LEDmatrix
BlinkM
Proximitysensor
Objectivecomplete–minidebriefing
SerialportcommunicationwiththeRaspberryPi
Engagethrusters
PythonprogramfortheWeasleyclock
Arduinoacknowledgementtocontrolsignal
Controlflowfortheweatherclock
Temperaturedata
ControloftheRGBLEDstrip
Controlofstepperviaserialport
Programmingtheweatherforecastposition
8x8matrixcontrol
BlinkMcontrol
Objectivecomplete–minidebriefing
Missionaccomplished
Hotshotchallenge
4.ChristmasLightSequencer
Missionbriefing
Whyisitawesome?
Yourobjectives
Missionchecklist

InterfacethedevicestotheRaspberryPi
Prepareforliftoff
Engagethrusters
ConnectingmultipleappliancestotheRaspberryPi
Objectivecomplete–minidebriefing
SettingupthedigitallyaddressableRGBmatrix
Prepareforliftoff
WherecanIbuythem?
Engagethrusters
Howdoesitwork?
LightinguptheRGBLEDstrip
AnArduino-basedcontrol
Objectivecomplete–minidebriefing
Interfaceofanaudiodevice
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Installingthewebserver
Prepareforliftoff
Engagethrusters
Objectivecomplete–missiondebriefing
Interfacingthewebserver
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Missionaccomplished
References
5.InternetofThingsExample–AnE-mailAlertWaterFountain
Missionbriefing
Whyisitawesome?
Yourobjectives

Missionchecklist
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
InstallationoftheFlaskframework
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
ControllingRGBLEDsfromawebpage
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Setupofthee-mailalertsinthefountain
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Missionaccomplished
Hotshotchallenge
6.RaspberryPiasaPersonalAssistant
Missionbriefing
Whyisitawesome?
Yourobjectives
Missionchecklist
Settingupthee-mailfeedparser
Prepareforliftoff
Engagethrusters
Settinguptheparserforremindersandevents
Prepareforliftoff
Engagethrusters
Designinganenclosuredesignforthepersonalassistant
Prepareforliftoff

Engagethrusters
Settinguptheassemblyforthedishmonitor
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Settingupsensorsforthekeyalertsystem
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Missionaccomplished
Hotshotchallenges
References
7.RaspberryPi-basedLineFollowingRobot
Missionbriefing
Whyisitawesome?
YourHotshotobjectives
Missionchecklist
AssemblyofthePiPlateforthelinefollowingrobot
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Sensorselection,interface,anddatainterpretation
Engagethrusters
LightDependentResistors
Infraredemitter/detector
Machine-vision-basedlinefollowingrobot
Sensorselection
Objectivecomplete–missiondebriefing
Implementationoflinefollowinglogicbasedonsensordata
Prepareforliftoff
Engagethrusters

Objectivecomplete–minidebriefing
Testingthemotordrivercircuit
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Preparationofthelinefollowingcourse
Prepareforliftoff
Engagethrusters
Useelectricaltapeandbuildatrack
Designingthechassisforthelinefollowingrobot
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Astep-by-stepassemblyoftherobot
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Missionaccomplished
Hotshotchallenge
References
8.ConnectFourDesktopGameusingRaspberryPi
Missionbriefing
Whyisitawesome?
Yourobjectives
Missionchecklist
Helloworldexamplewiththepygame
Prepareforliftoff
Engagethrusters
Playingsoundsusingthepygamemodule
Buildingmenususingthepygamemodule
Objectivecomplete–minidebriefing

GettingstartedwiththeConnectFourgame(UIandsoundeffects)
Prepareforliftoff
EngageThrusters
Addingamenuforthegame
Addingsoundstothegame
Objectivecomplete–missiondebriefing
InterfacinggameinputsusingthePiFacemodule
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
AbriefdescriptionoftheConnectFourGameAI
Prepareforliftoff
Engagethrusters
Maingameloop
Objectivecomplete–minidebriefing
Marqueedesignandcontrol(optional)
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Setupoftheswitchesusingacardboardbox
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Missionaccomplished
Hotshotchallenge
References
9.TheRaspberryPi-enabledPet/WildlifeMonitor
Missionbriefing
Whyisitawesome?
Yourobjectives
Missionchecklist

Installingandtestingthepython-twistedframework
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
SettingupandtestingSparkCoretointeractwithappliances
Prepareforliftoff
EngageThrusters
Objectivecomplete–minidebriefing
InstallingandtestingtheGoogleCoderprojectontheRaspberryPi
Prepareforliftoff
Engagethrusters
Objectivecomplete–objectivecomplete
Abriefoverviewofabirdfeederthattriggersacamera
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Alternativesandprojectideastoconsider
Missionaccomplished
Hotshotchallenge
10.RaspberryPiPersonalHealthMonitor
Missionbriefing
Whyisitawesome?
YourHotshotobjectives
Missionchecklist
Settingupawebservertorecordhealthparameters
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
AsimpleexercisetoolusingtheRaspberryPi
Prepareforliftoff
Engagethrusters

Aminiprojectidea
Objectivecomplete–minidebriefing
Settingupane-mailfeedparsertorefillaprescriptionaswellasremindtheuseraboutanupcomingdoctor’sappointment
Engagethrusters
Settingupareminderfordoctor’sappointments
Objectivecomplete–minidebriefing
Asimpletoolthatremindsapersontotakehis/herpills
Prepareforliftoff
Engagethrusters
Otherprojectideas
Objectivecomplete–minidebriefing
Missionaccomplished
Hotshotchallenge
11.HomeAutomationusingRaspberryPi
Missionbriefing
Whyisitawesome?
Yourobjectives
Missionchecklist
Asimpleexamplethatcontrolslimitedindoorandoutdoorlightingintheevening
Prepareforliftoff
Softwareprerequisites
Engagethrusters
Objectivecomplete–minidebriefing
Alternativesolutionsandsomeprojectideastoconsider
Acustomarywebserverexample
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
Turningonalawnsprinkleronlywhenthereisnorainforecast!
Prepareforliftoff
Engagethrusters

Objectivecomplete–minidebriefing
GainingremoteaccesstoyourRaspberryPitocontrolappliances
Someprojectideastoconsider
Missionaccomplished
12.UsingaRaspberryPiforScienceandEducation
Missionbriefing
Whyisitawesome?
YourHotshotobjectives
ImprovingyourvocabularyusingtheRaspberryPi
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
RaspberryPiandKhanAcademy
Someideastoconsider
BuildingasciencefairexhibitusingtheRaspberryPi
Prepareforliftoff
Engagethrusters
Objectivecomplete–minidebriefing
SomesimpleeducationalexperimentsusingtheRaspberryPi
Hotshotchallenge
13.TipsandTricks
Missionbriefing
Whyisitawesome?
Yourobjectives
Missionchecklist
SettingupRaspberryPiasadevelopmentplatform
#1–SimpletrickforPythondevelopmentviaremotelogin
#2WebdevelopmentusingGoogleCoder
#3AdafruitOccidentalis
#4JavaDevelopmentusingtheRaspberryPi
#5TheThingboxproject

RemotelyloggingintheRaspberryPifromanywhereontheInternet
ProblemsthatmightbeencounteredwhileusingRaspberryPi
SDcardcorruption
Powerissues
DevicespoweredbyUSB
Cooladd-onhardwaresourcesdevelopedfortheRaspberryPiplatform
TheRaspberryPimodelBversusB+,modelAversusA+
Projectideasthatcanbeimplementedoveraweekend
UsefulresourcesfortheRaspberryPi
RaspberryPiFoundation’sforums:
RaspberryPiStackExchange:
Element14’sRaspberryPicommunity:
Missionaccomplished
Index


RaspberryPiMechatronicsProjectsHOTSHOT


RaspberryPiMechatronicsProjectsHOTSHOTCopyright©2015PacktPublishing
Allrightsreserved.Nopartofthisbookmaybereproduced,storedinaretrievalsystem,ortransmittedinanyformorbyanymeans,withoutthepriorwrittenpermissionofthepublisher,exceptinthecaseofbriefquotationsembeddedincriticalarticlesorreviews.
Everyefforthasbeenmadeinthepreparationofthisbooktoensuretheaccuracyoftheinformationpresented.However,theinformationcontainedinthisbookissoldwithoutwarranty,eitherexpressorimplied.Neithertheauthors,norPacktPublishing,anditsdealersanddistributorswillbeheldliableforanydamagescausedorallegedtobecauseddirectlyorindirectlybythisbook.
PacktPublishinghasendeavoredtoprovidetrademarkinformationaboutallofthecompaniesandproductsmentionedinthisbookbytheappropriateuseofcapitals.However,PacktPublishingcannotguaranteetheaccuracyofthisinformation.
Firstpublished:February2015
Productionreference:1190215
PublishedbyPacktPublishingLtd.
LiveryPlace
35LiveryStreet
BirminghamB32PB,UK.
ISBN978-1-84969-622-7
www.packtpub.com

CreditsAuthors
SaiYamanoor
SrihariYamanoor
Reviewers
GuyScheffer
SreedharVaddi
CheukYu
CommissioningEditor
UshaIyer
AcquisitionEditors
UshaIyer
RebeccaPedley
SamWood
ContentDevelopmentEditor
SusmitaSabot
TechnicalEditor
ParagTopre
CopyEditor
JanbalDharmaraj
ProjectCoordinator
MiltonD’souza
Proofreaders
SimranBhogal
MariaGould
AmeeshaGreen
PaulHindle
Indexer
HemanginiBari
Graphics
SheetalAute

DishaHaria
ProductionCoordinators
AparnaBhagat
ManuJoseph
CoverWork
AparnaBhagat


AbouttheAuthorsSaiYamanoorisamechatronicsengineerworkingforaprivatestart-upschoolintheSanFranciscoBayAreawherehebuildsdevicesthathelpstudentsachievetheirfullpotential.HecompletedhisdegreeinmechanicalengineeringatCarnegieMellonUniversity,Pittsburgh,PA,andhisundergraduateworkinmechatronicsatSriKrishnaCollegeofEngineeringandTechnology,Coimbatore,India.Hisinterests,deeplyrootedinDIYandopensoftwareandhardwarecultures,includedevelopinggadgetsandappsthatimprovequalityoflife,InternetofThings,crowdfunding,education,andnewtechnologies.Inhissparetime,heplayswithvariousdevicesandarchitecturessuchasRaspberryPi,Arduino,Galileo,Androiddevices,andothers.Saishareshisadventureswithmechatronicsattheaptlynamed“MechatronicsCraze”blogathttp://mechatronicscraze.wordpress.com/.
IwanttothankmyparentsforencouragingmeinallmyendeavorsandformakingmewhatIamtoday.Iamgratefultomybrotherwhohashelpedshapemycareeralltheseyears.IlookforwardtoworkingwithSriharionsimilarprojectsinthefuture.IsincerelythankMr.S.BalajiRaghavendrawhohasbeenagreatsourceofinspirationtomewhilepursuingmyundergraduatedegree.IamalsothankfultoSusmitaSabotandtheentiresupportteamatPacktPublishingwhowerepatientandunderstoodthecircumstancesduringdifficulttimes.
SrihariYamanoorisanaturephotographerandmechanicalengineerwithexperienceworkinginmedicaldevicedesignandCAD/CAM.Hecompletedhismaster’sinscienceaswellasadegreeinengineeringfromStanfordUniversity.Hisworkandinterestsinmedicaldevicesincludewomen’shealth,cancer,orthopedics,andcardiovasculardiseases,aswellasnewerareassuchasdigitalhealthandelectronichealthrecords.HehasseveralthousandsofhoursofCADexperiencebehindhimandisalsocertifiedamongotherthingsasaSolidWorksexpert,simulationprofessional,andaSolidWorksinstructor.Hisinterestsrangefromengineeringandeducationtosocialentrepreneurship,animalwelfare,andcrowdfunding.
Iwouldliketothankmyparents,NarasimhanandYasodaVenakatakrishnan,fortheirsteadfastsupportinmyeducationandeffortsthroughouttheyears,culminatinginprojectssuchasthisbook.Overthecourseoftheyears,manyfriendshavehelpedbothSaiandmegrowinmanyways.Forthisreason,Iwouldliketosayabigwordofthanks,innoparticularorder,toRikaCatherineHirachi,AnnaLiuJao,ShirupaGupta,PatrickNguyen,VishnuPrasadRamachandran,AndrewEib,ChristopherMa,andKarthikPalaniappan.IamsureIammissingsomenames,andforthis,Iapologizeinadvance.Iwouldalsoliketothankmygraciousmentors,Dr.KevinWaldron,Dr.JamesStubbs,RussellSampson,MukundPatel,andasIfondlycallhim,Cyril“Master”,allofwhomhavegivenmeadviceandshownmetheway.Iwouldliketoespeciallythankmyfirstcat,Squeaky,andthefelinesBob,Saxon,andFishbone,thathavefollowedme,forinspiringmeandpushingmetostayontrackandkeepaneyeonthebigpicture.


AbouttheReviewersSreedharVaddihas4yearsofexperienceinbigdata,4yearsincloudcomputing,and15yearsinJava.Hisexperienceincludesworkinthefieldsofbigdatasecurity,biomedical/healthcare,mobilesecurity,financialservices(wholesale,mortgage,investment,andbrokerage),theWeb(marketplace,crowdsourcing,andadvertising),newsandentertainment,propertyandcasualtyinsurance,softwareproductdevelopment,andscientificresearch.
Hehashands-onexperienceasanarchitectworkingonenterprisemobileapplications,Hadoop,SaaS,PaaS,IaaS,thecloud,richenterpriseapplications,n-tierenterprisesystems,EnterpriseApplicationIntegration(EAI)inweb-enablinglegacysystems,IBMMainframeandSAP,andSOAwebserviceswithJava2andJEE.
HehasalsoworkedinallphasesofSDLC,namelydesigning,developing,performancetesting,andimplementingWeb-2.0,Web-UI,server-side,middleware,andmobileapplications.HehasalsoworkedwithBig5ConsultingandFortune100companies.Hehasledteamsofsizesvaryingfrom2to80acrosstheglobeindifferenttimezones,cultures,anddialects.
HeisanadministratorofJEEcontainers(Geronimo,WebSphere,Weblogic,JBoss,andTomcat)andCDH.Heisalsoatechnicalconsultantatastealthmodestart-upinanimalcareintheclinicaltrialsindustry.Heisadiligentworkerandquicklearnerwithexcellentproblemsolving,presentation,andmentoringskills.
CheukYuispursuingabachelor’sdegreeinelectricalengineeringattheUniversityofCalifornia,LosAngeles(UCLA),withanemphasisoncircuitandsignalprocessing.HeworkedonmultipleembeddedsystemsprojectsusingvariousmicrocontrollerssuchasArduino,Teensy,andRaspberryPi.AsastudentresearcherfortheELFINCubeSatMissionatUCLA,healsohashands-onexperienceworkingonprintedcircuitboards,includingdesigningandtestingavionicsandgroundsupportequipmentboards.Besidesworkandstudy,heisalsoanamateurradiooperatorandastronomer.


www.PacktPub.com

Supportfiles,eBooks,discountoffers,andmoreForsupportfilesanddownloadsrelatedtoyourbook,pleasevisitwww.PacktPub.com.
DidyouknowthatPacktofferseBookversionsofeverybookpublished,withPDFandePubfilesavailable?YoucanupgradetotheeBookversionatwww.PacktPub.comandasaprintbookcustomer,youareentitledtoadiscountontheeBookcopy.Getintouchwithusat<[email protected]>formoredetails.
Atwww.PacktPub.com,youcanalsoreadacollectionoffreetechnicalarticles,signupforarangeoffreenewslettersandreceiveexclusivediscountsandoffersonPacktbooksandeBooks.
https://www2.packtpub.com/books/subscription/packtlib
DoyouneedinstantsolutionstoyourITquestions?PacktLibisPackt’sonlinedigitalbooklibrary.Here,youcansearch,access,andreadPackt’sentirelibraryofbooks.

Whysubscribe?FullysearchableacrosseverybookpublishedbyPacktCopyandpaste,print,andbookmarkcontentOndemandandaccessibleviaawebbrowser

FreeaccessforPacktaccountholdersIfyouhaveanaccountwithPacktatwww.PacktPub.com,youcanusethistoaccessPacktLibtodayandview9entirelyfreebooks.Simplyuseyourlogincredentialsforimmediateaccess.


PrefaceTheRaspberryPiisaquaintexampleoftechnologicalinnovationsthatcomebyonceeverytwoorthreedecadesandsetoffarevolutionthattoucheseveryaspectofhumanlifefromscientificexplorationtoentertainmenttoeducation.Whatisexcitingthistimearoundisthatthereareseveralsuchinnovationshappeningsimultaneously.Theymightsoundlike,andareinaway,buzzwords,buttheyareinfactreal,andarechangingourlivesinsomanyways,sofewofwhichweareconsciouslyawareof.Wearespeakingofinnovationsinentrepreneurship,suchascrowdsourcingortheemergenceofDIYwithanalmostcult-likefollowingtoinnovationsintechnologythatarecurrent,suchas3DprintingandInternetofEverything,andinnovationsthatareimpendingsuchas4Dprinting,smartmanufacturing,andmuchmore.
TheRaspberryPihasalreadyfoundseveralusesasevidencedbyhundredsofwebsites,projectexamples,andcrowdsourcingcampaigns.PeoplehaveusedthePitobuildrobots,teachprogramming,restoreoldgamingconsoles,streamvideos,collectdata,anddomanyotherthings.ThePiitselfhasgonethroughdesigniterationsandcontinuestospurcompetingsystems.PeoplehavetakenadvantageofthisandhavehookedupthePitomanydifferentecosystems,expandingitsubiquityandutility.
ThepurposeofthisbookistohelpthosewhoareexcitedabouttheRaspberryPiandhaveprojectideasinmind,orwouldsimplyliketogettheirhandsdirtyandpracticeimplementingprojectssothattheycanthenusethatknowledgeforotherendeavors.Wetriedtotakeapracticalapproach,introducingthePiinthefirstcoupleofprojectthatyoucanskipifyouarefamiliarwiththeRaspberryPiandhaveuseditbefore.Wethendiscussprojectsofincreasingcomplexity.WehavealsoattemptedtodiversifytheprojectstodemonstratevarioususesforthePithroughoutthebook.

WhatthisbookcoversProject1,HelloWorld,willintroducetheRaspberryPiandremindyouofthingsthatyoushouldknowasyouproceedthroughthebook.WewillsetuptheRaspberryPiandblinkanLED.
Project2,ARaspberryWebIDEExample,willtakeyouthroughPythondevelopmentusingabrowser.WewillusetheAdafruitWebIDEandleadyouthroughthedevelopmentprocessusingAdafruitproductsaspropsfortheexamples.
Project3,TheArduinoRaspberryPiInterface,isinspiredbytheHarryPotterseries,andinanefforttoshowourloveforthisseries,wehavecreatedaclocksimilartotheinnovativeandendearingWeasleyclockusingtheRaspberryPiandanArduino.Thisproject,ofcourse,allowstheclocktoreportbackweatherconditions.
Project4,ChristmasLightSequencer,discussesholidaysasthebesttimeforDIYprojects,andifyouareeverstarvedofideas,holidaysarethebesttimetocookupideas.WepickedaChristmas-themedprojecttodemonstratecontrollingappliancesconnectedtoalocalnetworkusingRaspberryPi.
Project5,InternetofThingsExample–AnE-mailAlertWaterFountain,followsthethemeofthepreviousproject.Wewillshowyouhowtocontroladecorativefountainsuchthatanytimeyoureceiveanewe-mail,yourfountain’slightwillflashanalert(thiscanalsobeswitchedtoreceiveTwitteralerts).
Project6,RaspberryPiasaPersonalAssistant,willshowyouhowyoucanusethePiasyourpersonalassistant,remindingyouofchores,settingalarms,anddoingeverythingatyourcommand.
Project7,RaspberryPi-basedLineFollowingRobot,willtakeyouthroughthesimplestofallrobots,thelinefollowingbot,withRaspberryPiatthehelm.Thisprojectwillshowyouthewayforthisandothercomplexroboticsprojectsyouwishtoimplement.
Project8,ConnectFourDesktopGameusingRaspberryPi,followstheinstant-classicthemefortheRaspberryPi,whichincludesgames.Allmannersofgamingapplications,includingtherevivalofarchaicgamestonewonesandmods,arebeingcreatedusingtheRaspberryPi.Wewillimplementthegameusingapushbuttoninterface.
Project9,TheRaspberryPi-enabledPet/WildlifeMonitor,willwalkyouthroughafunexampleofabirdfeedermonitorthatallowsyoutotriggeraphotocaptureeachtimethebirdapproachesthefeeder.Youcanthinkofextendingthistootherpets,orsay,theferalcatsinyourcolony.
Project10,RaspberryPiPersonalHealthMonitor,isaprojectwherewesetupasimplewebservertorecordourpersonalhealthparameters,buildasimpletooltoremindourselvestoremainphysicallyactive,andremindourselvestorefillaprescriptionviae-mailalerts.
Project11,HomeAutomationusingRaspberryPi,isaprojectwherewewillshowyouhowtocontrolappliancesusingatwistednetworkwheretheapplianceisconnectedtoa

platformsuchasanArduino.TheRaspberryPiactsasaserverthatcontrolsallsuchnodesinthenetwork.
Project12,UsingaRaspberryPiforScienceandEducation,isaprojectpackedwithexamples,includingavocabularylearningtool,awebhostforKhanAcademy,andawindmillgeneratorscienceexhibit.Havefunlearningandteaching!
Project13,TipsandTricks,isaprojectpackedwithtipsandtricksthatwillhelpyouusetheRaspberryPi!
Youcanalsogetthevideos,tipsandtricks,andmanymorethingsrelatedtotheprojectsathttp://diywithpi.com/.


WhatyouneedforthisbookTogetstarted,youwillneedtheRaspberryPi,amonitor,akeyboard,apowersource,andpreferably,alaptoporpersonalcomputerrunningonanyOS—Windows,Linux,orApple.Otherhardwareandsoftwarerecommendationsaremadeintheindividualprojects,andyouarewelcometoreplacethemwithwhatyouseefit.AworkingknowledgeofPythonispreferred,butnotrequired.


WhothisbookisforThisbookisprimarilyaimedathobbyistsanddo-it-yourselfenthusiastsaswellasthoselookingtoimplementspecificprojectsusinglowcosthardwareandsoftwarecenteredaroundtheRaspberryPi.Basicexposuretoelectronics,programming,andInternetusageisassumed.Wehavetriedtotakeapragmaticapproach,implementingtheprojectsandshowinghowyoucandothisonyourown.


ConventionsInthisbook,youwillfindseveralheadingsappearingfrequently.Togiveclearinstructionsofhowtocompleteaprocedureortask,weuse:


MissionbriefingThissectionexplainswhatyouwillbuild,withascreenshotofthecompletedproject.

Whyisitawesome?Thissectionexplainswhytheprojectiscool,unique,exciting,andinteresting.Itdescribeswhatadvantagetheprojectwillgiveyou.

YourHotshotobjectivesThissectionexplainstheeightmajortasksrequiredtocompleteyourproject.
Task1Task2Task3Task4Task5Task6Task7Task8

MissionchecklistThissectionexplainsanypre-requisitesfortheproject,suchasresourcesorlibrariesthatneedtobedownloaded,andsoon.


Task1Thissectionexplainsthetaskthatyouwillperform.

PrepareforliftoffThissectionexplainsanypreliminaryworkthatyoumayneedtodobeforebeginningworkonthetask.

EngagethrustersThissectionliststhestepsrequiredinordertocompletethetask.

Objectivecomplete–minidebriefingThissectionexplainshowthestepsperformedintheprevioussectionallowsustocompletethetask.Thissectionismandatory.

ClassifiedintelThissectionprovidessomeextrainformationrelevanttothetask.
Youwillalsofindanumberofstylesoftextthatdistinguishbetweendifferentkindsofinformation.Herearesomeexamplesofthesestyles,andanexplanationoftheirmeaning.
Codewordsintext,databasetablenames,foldernames,filenames,fileextensions,pathnames,dummyURLs,userinput,andTwitterhandlesareshownasfollows:“Wewillgothroughtheimportantfeaturesofthepygamemodule,whichisnecessarytobuildourarcadegame,includingplayingsoundsandcontrollingthemenu.”
Ablockofcodeissetasfollows:
GPIO.output(25,True)
while1:
GPIO.output(25,False)
sleep(1)
GPIO.output(25,True)
sleep(1)
Anycommand-lineinputoroutputiswrittenasfollows:
#cp/usr/src/asterisk-addons/configs/cdr_mysql.conf.sample
/etc/asterisk/cdr_mysql.conf
Newtermsandimportantwordsareshowninbold.Wordsthatyouseeonthescreen,inmenusordialogboxesforexample,appearinthetextlikethis:“clickingtheNextbuttonmovesyoutothenextscreen”.
NoteWarningsorimportantnotesappearinaboxlikethis.
TipTipsandtricksappearlikethis.


ReaderfeedbackFeedbackfromourreadersisalwayswelcome.Letusknowwhatyouthinkaboutthisbook—whatyoulikedormayhavedisliked.Readerfeedbackisimportantforustodeveloptitlesthatyoureallygetthemostoutof.
Tosendusgeneralfeedback,simplysendane-mailto<[email protected]>,andmentionthebooktitleviathesubjectofyourmessage.
Ifthereisatopicthatyouhaveexpertiseinandyouareinterestedineitherwritingorcontributingtoabook,seeourauthorguideonwww.packtpub.com/authors.


CustomersupportNowthatyouaretheproudownerofaPacktbook,wehaveanumberofthingstohelpyoutogetthemostfromyourpurchase.

DownloadingtheexamplecodeYoucandownloadtheexamplecodefilesforallPacktbooksyouhavepurchasedfromyouraccountathttp://www.packtpub.com.Ifyoupurchasedthisbookelsewhere,youcanvisithttp://www.packtpub.com/supportandregistertohavethefilese-maileddirectlytoyou.

DownloadingthecolorimagesofthisbookWealsoprovideyouaPDFfilethathascolorimagesofthescreenshots/diagramsusedinthisbook.Thecolorimageswillhelpyoubetterunderstandthechangesintheoutput.Youcandownloadthisfilefromhttp://www.packtpub.com/sites/default/files/downloads/6227OT_ColoredImages.pdf.

ErrataAlthoughwehavetakeneverycaretoensuretheaccuracyofourcontent,mistakesdohappen.Ifyoufindamistakeinoneofourbooks—maybeamistakeinthetextorthecode—wewouldbegratefulifyouwouldreportthistous.Bydoingso,youcansaveotherreadersfromfrustrationandhelpusimprovesubsequentversionsofthisbook.Ifyoufindanyerrata,pleasereportthembyvisitinghttp://www.packtpub.com/submit-errata,selectingyourbook,clickingontheerratasubmissionformlink,andenteringthedetailsofyourerrata.Onceyourerrataareverified,yoursubmissionwillbeacceptedandtheerratawillbeuploadedonourwebsite,oraddedtoanylistofexistingerrata,undertheErratasectionofthattitle.Anyexistingerratacanbeviewedbyselectingyourtitlefromhttp://www.packtpub.com/support.

PiracyPiracyofcopyrightmaterialontheInternetisanongoingproblemacrossallmedia.AtPackt,wetaketheprotectionofourcopyrightandlicensesveryseriously.Ifyoucomeacrossanyillegalcopiesofourworks,inanyform,ontheInternet,pleaseprovideuswiththelocationaddressorwebsitenameimmediatelysothatwecanpursuearemedy.
Pleasecontactusat<[email protected]>withalinktothesuspectedpiratedmaterial.
Weappreciateyourhelpinprotectingourauthors,andourabilitytobringyouvaluablecontent.

QuestionsYoucancontactusat<[email protected]>ifyouarehavingaproblemwithanyaspectofthebook,andwewilldoourbesttoaddressit.


Chapter1.HelloWorldItisaHotshotcustomtobeginlearninganythingnewwithaHelloWorldexample.Sincewewillbedoingreallycoolthingsinthisbook,wewillsay“HelloWorld”inauniquefashion.Inthisproject,wewillusetheRaspberryPitocauseanLEDlighttoblink.ThisprojectisdirectedtowardsthosewhoarerelativelynewtotheRaspberryPienvironmentasawarm-upexercise.FeelfreetoskipaheadifyouhavealreadydonethiswithyourPi,thoughwesuggestyoulookthroughandmakesureyouhaven’tmissedanything.

AquickintroductiontotheRaspberryPiIfwesearchforthetermRaspberryPiovertheweboropentheRaspberryPiFoundation’swebpage,wewillfindthattheRaspberryPiisacomputerthatisthesizeofacreditcard.
PartsofaRaspberryPi

FeaturesofaRaspberryPiTheRaspberryPiFoundation(http://www.raspberrypi.org/)initiallyreleasedtheRaspberryPimodelB.ThiswasfollowedbytheRaspberryPimodelA.In2014,theRaspberryPifoundationreleasedvariantsB+andA+.TheRaspberryPimodelsAandA+(costing25USDand20USDrespectively)donotcomewithanEthernetport,aUSBportand256MBRAM.ThemodelA+replacedmodelAwhilethemodelB+replacedmodelB.ThemodelB(price:35USD)camewithanEthernetport,2USBports,and512MBRAM;modelB+,whichsupersedesmodelB,comeswith40pinGPIOheaderasopposedto26intheearliermodels,andhas4USBportsandamicroSDcardslotinsteadoftheSDslot.PertheRaspberryPiFoundationwebsite,modelB+(aswellasmodelA+)consumeslowerpower,hasbetteraudioandabetterformfactor,whichwecertainlyconcurwith.ThemodelA+alsocomeswitha40pinGPIOheaderandamicroSDcardslot.ThemodelsA+andB+haveninemoreGPIOpinsthantheirpredecessors.
NoteTheRaspberryPi2wasreleasedafterwefinishedwritingthebook.Pleaserefertothebook’ssitetofindoutmoreaboutgettingstartedwithmodel2.
TheobjectiveofthisbookistobuildcoolprojectsusingtheRaspberryPi.WewilldiscussthecomponentsofRaspberryPifromthisperspective.IfyouareinterestedinfindingoutmoreabouttheRaspberryPi,theRaspberryPiFoundation’swebpagehaspublishedthetechnicalspecificationsofallthecomponents.
First,wewilldiscussthecomponentsavailableontheRaspberryPiandtheuseofthesecomponentsinourprojects.ThecomponentsoftheRaspberryPiinclude:
2USBports(1USBportavailableinmodelA)Ethernetport(availableonlyinmodelsBandB+)RCAoutputHDMIoutputAudiooutputLowlevelperipherals,whichinclude:
GPIO(GeneralPurposeInputOutput)UART/SerialPort(UniversalAsynchronousReceiverTransmitter)I2C(twowireinterface)SPI(SerialPeripheralInterface)


WherecanIbuyaRaspberryPi?Element14andRSComponentsarethemostcommondistributorsoftheRaspberryPiintheUnitedStates.TheRaspberryPimodelAwasroughlypricedat25USD,whileitssuccessormodelA+waspricedat20USD.ThemodelBwaspricedat35USDandthemodelB+ispricedat40USD.TherearealsoaneverincreasingnumberoflocaldistributorssuchasAdafruitandFry’sElectronicsintheUSthatselltheRaspberryPiforamargin.PleasechecktheRaspberryPiFoundationwebsiteandothersourcesformorevendors.

RequirementstogetstartedwiththeRaspberryPiInthissection,wewilldiscusstheitemsrequiredtogetstartedwiththeRaspberryPi.Wewillneedallthesamethingsthatarerequiredtouseacomputer/laptop.Theyare:
DisplayKeyboardMouseWi-FiAdapter/Ethernetcable
NoteItispossibletousetheRaspberryPiviaremoteloginusingasecureshell.ThismightseemdifficulttothosewhoarenewtotheLinuxenvironment.ThesetupoftheRaspberryPiforremoteloginisexplainedinProject13,TipsandTricks.
TheRaspberryPieLinuxwiki(http://elinux.org/RPi_Hub)haslistedperipheralsthathavebeentestedandconfirmedtohaveworkedontheRaspberryPi.Youhavethefreedomtochooseperipheralsaccordingtoyourchoice.
Display:TheRaspberryPiisprovidedwithanHDMIoutputandanRCAoutput.ItispossibletoconnectamonitorthathasanHDMIinput.ItisalsopossibletoconnectmonitorsthathaveaDVIinputwithanHDMItotheDVIcable.Powersupply:SincetheRaspberryPiconsumes700mAforitsoperation,itisrecommendedthatthereaderusespoweredUSBhubstousedevicessuchasWi-FiadaptersasopposedtopluggingindevicessuchastheWi-FiadaptersdirectlytotheUSBportoftheRaspberryPitoavoidthedeviceresettingitself.
OperatingsystemsontheRaspberryPiTheRaspberryPifoundationrecommendsthefollowingoperatingsystemsontheRaspberryPi.Theyare:
RaspbianArchLinuxARMRISCOS
Youarewelcometochooseanyoperatingsystemofyourchoice.Forbeginners,westronglyrecommendtheRaspbianOSforprojects.TheRaspbianisequippedwithtoolstogetstartedeasily.TheRaspberryPi’sfirmwareisimplementedsuchthattheoperatingsystemisloadedfromanSDcard.

GettingstartedwithRaspbianInthissection,wewilldownloadanimagefromtheRaspberryPiFoundation’swebpagetoacomputer,flashanSDcardwiththeimage,andsetuptheoperatingsystemontheRaspberryPi.Wewillalsotrytowriteandexecuteourfirstexample.
DownloadingRaspbianThelatestRaspbianimageishostedontheRaspberryPiFoundation’swebpage(http://www.raspberrypi.org/downloads/).ThelatestimageatthetimeofwritingthisbookwasRaspbianwheezy.Weneedtodownloadtheimageandextractittothefolderofourchoice.
RaspbianwheezyontheRaspberryPiFoundation’swebsite
FlashingimageontotheSDcardWewilldiscussflashingtheSDcardwiththeRaspbianimageonbothWindowsandLinuxmachines.
Windows
Extractthefilestoalocationofyourchoice.TheWin32DiskImagertoolisrequiredtopreparetheSDcardwiththeRaspbianimage.
TipAstandardRaspbianimageisabout1.8GBbig.ItisstronglyrecommendedthatyouuseanSDcardthatisatleastof4GBbig.

TheWin32DiskImagertool
WecanflashtheSDcardinthreesimplesteps(asshownintheprecedingscreenshot):
1. SelecttheSDcardthatneedstobeflashed.2. SelecttheRaspbianimagelocation.3. ClickonWrite.4. ClickonYestoconfirm.
ConfirmoverwritingtheSDcard
5. Itcantakeawhilebeforethewritecycleiscompleted.
Linux

TherearetwoidenticalmethodstoflashanSDcardonaLinuxmachine.Thetwoapproachesinclude:
AGUI-basedapproachAcommand-lineinterface-basedapproach
Acommand-lineinterface-basedapproach
TheSDcardcanbeflashedinthreesimplestepsusingacommand-lineinterface.Thesestepsareasfollows:
1. IdentifytheSDcardmountpoint.2. UnmounttheSDcard.3. FlashtheSDcard.
IdentifyingtheSDcardmountpoint
AssoonasweinserttheSDcardintoaUSBcardreaderoranSDcardslotfoundonalaptop,weneedtoopenaterminalonourLinuxmachine.Weneedtoidentifyourdevice’smountpointonthemachineusingthefollowingcommand:
df–h
Thedevicesenumeratedonthemachinewillbelistedasshowninthefollowingscreenshot:
Storagedevicesidentifiedbytheoperatingsystem

UnmounttheSDcard
Inthepreviousexample,the/dev/sdb5pathisthestoragedeviceofinterest.Theremaybemorethanonestoragedevicethatmightbeconnectedtoamachine.Weneedtomakesurethatwehaveidentifiedtherightdevice.Oncewehaveidentifiedthedevice,ithastobeunmountedusingthefollowingcommand:
umount/dev/sdb
FlashtheSDcard
Now,wewillflashourSDcardusingthefollowingcommand:
ddbs=4Mif=~/2012-09-18-wheezy-raspbian.imgof=/dev/sdb
Theif=argumentpointstothelocationoftheimageandof=referstotheSDcardmountpoint.ThewriteoperationtakesawhiletocompleteanditisreadyforuseontheRaspberryPiuponcompletion.GUI-basedapproach
OnaDebianLinux-basedoperatingsystem,thereisapackagecalledusb-imagewriter.TheImageWriterpackageperformsthesameoperationsrequiredtoflashanSDcard.
AUSBImageWriteronUbuntu

SettinguptheRaspberryPiNowthattheimageisflashed,let’sgetstartedwithsettinguptheRaspberryPiforthefirsttime.WewillhavetoinserttheSDcardslotfoundontheothersideoftheRaspberryPi.
AflashedSDcardintheslot
Whenthekeyboardandthemouseareconnected,wecangetstartedbypoweringuptheRaspberryPi!
OncetheRaspberryPiispoweredup,theoperatingsystembootsuptoRaspi-config.Theraspi-configisthetoolusedtosetupdesktopoptions,keyboardsettings,storagesettings,andsoon.TheRaspi-configscreenisshowninthefollowingscreenshot:
TheRaspi-configscreen

Inthissection,wewilldiscusseachfeatureoftheraspi-configtool:
info:Asthenamesuggests,thissectiongivesthegeneralinformationaboutthetool.expand_rootfs:WhiletheSDcardisflashedwiththeoperatingsystemimage,theSDcardispartitionedjustaboutthesizeoftheimage.Thiscommandaidstoexpandthepartitionsothattheremainingspacecanbeusedforfilestorage.overscan:ThisisanoptionusedwhentheRaspberryPiisconnectedtothetelevision.configure_keyboard:Thisoptionisusedtoconfigurethechange_typeoptionofthekeyboard.change_pass:Thedefaultpasswordisraspberry,andifnecessary,thisoptionletsyouswitchtoastrongerpassword.change_locale:Theoptionletsyouchangethelanguagepreferences.change_timezone:Wecansetourcurrenttimezoneusingthisoption.memory_split:ThisoptionletsussplitthememorybetweentheARMprocessor’sCPUandthegraphicsprocessor.overclock:Thedefaultclockspeedis700MHz.Thisoptionletsyousettheclockspeedto1GHz.ThismightvaryforRaspberryPi2.ssh:Thisoptionenablesthesecureshellserver.ThisisrequiredtoremotelylogintheRaspberryPiandcontroldevicesremotely.ItisenabledbydefaultonRaspbian.boot_behaviour:Thisoptionenablesyoutobootdirectlyintothedesktop.
TipItisimportantthatyouenablethisoptiononasthedefaultoptionbootsintoanormaltext-basedconsole.
update:IftheRaspberryPiisconnectedtotheInternetusinganEthernetcable,theraspi-configtooldownloadsanypackagethatmightbeavailable.
OncewecompletethesetupprocessbyselectingFinish,theRaspberryPirebootsandexpandsthefilesystemifnecessary.


MissionbriefingInthisproject,wewillsetuptheGPIO(GeneralPurposeInputOutput)peripheralontheRaspberryPiandwriteourfirstprogramtocauseanLEDtoblink.Attheend,wewillrepeatthesamestepswithaRaspberryPiadd-onboardcalledPiCrust.Thiswillallowyoutogetyourfeetwetandensureyouhavealltherighttoolsgoingforward,andshouldyouneedto,troubleshootanyproblemsyoumightidentify.

Whyisitawesome?Thinkofsaying“HelloWorld”asbothanodtoprogrammingtraditionandadryruntoensureyouarewellequipped!

YourHotshotobjectivesTheobjectivesforthismissionarequitesimple,andyettakeusallseveralmilestonesfurther!HerearetheobjectivesoftheHelloWorldmission:
CollectallthenecessarytoolsSetuptheGPIOperipheralIntroduceourselvestotheRaspberryPienvironmentTurnalightemittingdiode(LED)onandoffwitha1seconddelay

MissionchecklistGoovertheprevioussections,andmakesureyouhaveallthetools.DownloadtheGPIOlibraries,andensureyoucanlogintotheRaspberryPiremotely,andyouareallset!
NoteTherearetwodifferentwaystouseaRaspberryPi.Theyare:
ConnectingamonitortotheHDMIportortheRCAjackandakeyboardtotheUSBportoftheRaspberryPi.RemotelyloggingintotheRaspberryPifromthereader’sworkstation.
Ifyouareabeginner,itisbesttousethefirstmethodwhilethesecondmethodcanbeusedifyouarefamiliarwiththeLinuxoperatingsystemandremotelogincapabilities.
OncewecompletethesetupprocessbyselectingFinish,theRaspberryPirebootsandexpandsthefilesystemifnecessary.


HuntingandgatheringAsstatedbefore,youwillneedtomakesureyouhaveallthetools.So,goahead,huntandgatheraway.Grabatleastoneofeachofthefollowingandmorethanoneofeach,ifyou,likeus,arepronetoaccidents:
AlaptoptodownloadtheRaspberryPiimageandsetupeverythingRaspberryPi—ModelB/B+(preferred),akeyboard,andamousefortheRaspberryPi(optional)SDcardwith4GBmemory(SDcardpreparationwasexplainedearlierinthisproject)USBPowerAdapter(Rated1.0A)andMicroUSBpowercableEthernetcableWi-Fiadapter—(optional)refertotheeLinuxwikiforRaspberryPiforverifiedperipheralsBreadboardJumperwiresDiscreteResistorValuesAworkbench(oracleanworkingsurface—hopefullyyouhaveone)Goodthoughtsandacan-doattitudeLotsofcoffee,tea,orasafebeverageofyourchoice

EngagethrustersYouwillneedallofthetoolslistedintheprevioussectiontogetthroughthisproject.Takeyourtimeandmakesureyouhaveeverythinghandy!

Objectivecomplete–minidebriefingDoyouhaveallthetools?Readytogo?Thenontothenexttask!


SettinguptheGPIOWeneedtoenabletheGPIOperipheralsinourRaspbianinstallationtogetstarted.Inordertodownloadtherequiredtoolsandsetthingsinmotion,theRaspberryPineedstobeconnectedtotheInternet.
TheGPIOpinisapinthatisavailablefromtheRaspberryPi’sprocessorthatenablesinterfacinginputandoutputdevicestotheRaspberryPi.Inthissection,wewilltalkaboutsettinguptheGPIOforinterfacinganoutputdevice.Thereisa26-pininterface(40inModelB+)availableontheRaspberryPiandabout17ofthose26pinsareGPIOpins(26oftheminModelB+)whiletheothersaremiscellaneouspinssuchaspower.Thepinsaredrivenbya3.3VrailandeachGPIOpinisratedforabout17mAandthetotalcurrentdrawnotexceeding50mA.

EngagethrustersWealsoneedtoknowtheGPIOperipheralsavailabletoconductourexperiment.ThefollowingfigureshowstheGPIOmapsoftheRaspberryPiRev1andRev2:
GPIOmapforModelsA,B,andB+.(ImagepublishedwithpermissionfromRaspi.tv)
TheletterP1showninthefollowingimagecorrespondstoP1-1oftheGPIOmap.P1-1correspondstothefirstpinontheleftinthefrontrow,whileP1-2correspondstothefirstpinontheleftinthebackrow.
TheRaspberryPiGPIOperipheral

Inthisbook,wewillbemostlyusingPythonprogramminglanguage.Pythonisaverysimpleandeasylanguagetolearn.Wemaywanderofftootherprogramminglanguagesfromtimetotime,butwewillmostlysticktoPython.Withthisinmind,let’sgetstarted.
InstallingGPIOlibrariesTherearealotoflibrariesavailabletoaccesstheGPIOperipheral.Theeasiesttoinstallanduseisthequick2wirepythonAPI.TheAPIisusedtocontroltheGPIOperipheralsandI2CdevicesconnectedtotheRaspberryPi.
NoteTherearedifferentlibrariessuchastheRPi.GPIO,Pi4J,andsoon.Weareusingthequick2wireAPIinthisexampleasabeginnermightfinditeasytouse.Youarewelcometouseotherlibrariesofyourchoice.Thequick2wire-gpio-admintoolenablescontrollingtheGPIOpinswithoutrootaccess.
Onedisadvantageofusingthequick2wiremoduleisthatitprovidesaccessonlytoGPIOpins0through7.
Theterminalcanbelocatedintheleftcornerofthedesktopandhasbeenhighlightedinthefollowingscreenshot:
ACommand-lineterminalontheRaspbiandesktop
1. Thequick2wirelibraryinstallationisbasedonapostonthequick2wirewebsite(http://quick2wire.com/articles/how-to-add-quick2wire-as-a-raspbian-software-

source/).Inordertoinstallthequick2wire-pythonlibrary,therepositoryneedstobeaddedto/etc/apt/sources.list.
Inthecommandline,therepositoryisaddedbyusingthenanotexteditor:
sudonano/etc/apt/sources.list
Thefollowinglinesneedtobeaddedtothefile:
#Quick2WireSoftware
debhttp://dist.quick2wire.com/raspbianwheezymain
deb-srchttp://dist.quick2wire.com/raspbianwheezymain
ThefilecanbesavedbytypingCTRL+X.ThefilecanalsobesavedbypressingYkeywhileexitingtheeditor.Alternatively,thelinescanbeaddedusingagraphicaltexteditorsuchas,leafpadandsavingit:
sudoleafpad/etc/apt/sources.list
2. Inordertoensurethatthepackagesaredownloadedfromthequick2wirerepository,weneedtoauthenticatethepackagesusingakeyavailablefromquick2wire:
wgethttps://raw.githubusercontent.com/quick2wire/quick2wire-software-
users/master/[email protected]
sudoapt-keyadd
3. Thecacheisupdatedandthelatestsoftwarepackagescanbedownloadedasfollows:
sudoapt-getupdate
sudoapt-getupgrade
4. Thequick2wiretoolisinstalledasfollows:
sudoapt-getinstallquick2wire-gpio-admin
sudoapt-getinstallquick2wire-python3-api

Objectivecomplete–minidebriefingNow,wasn’tthateasy?Let’sgetmorefamiliarwiththeGPIOinput/outputoperations.


GPIOprogrammingusingPythonInthissection,wewillensurethatthelibraryiscorrectlyinstalledandaddtheusertothegroup.ThiswillenabletheusertousetheGPIOpinswithouthavingrootprivileges.ThiswillbefollowedbythesectionongettingstartedwithGPIOcontrolprogramminginPython.

EngagethrustersInordertogetstartedwithprogrammingintheRaspberryPi,wewilllaunchPythonIDLE3fromthedesktop.
LaunchingIDLE3fromthedesktop
1. Now,wehavetogetstartedwithprogrammingtheLEDblinkingexampleinIDLE3.2. ThisLEDblinkingsamplecodeisasfollows:
fromtimeimportsleep
fromquick2wire.gpioimportpins,Out
withpins.pin(7,direction=Out)asout_pin:
whileTrue:
out_pin.value=1
sleep(1)
out_pin.value=0
sleep(1)
out_pin.unexport()
3. Wewillimportthesleepclassfromthetimemoduleinthefirstline.Thisisrequiredtointroducea1-seconddelaybetweenturningtheLEDonandoffeveryothersecond:
fromtimeimportsleep
4. Wealsoneedthepinclassfromthequick2wireGPIOlibrary:

fromquick2wire.gpioimportPin
5. Weneedtosettheoutputpinthatwewillbeusingintheexample:
LED_output=Pin(8,Pin.Out)
6. Wecansetthepintothelogicalhigh(3.3V)asfollows:
LED_output=1
7. Wewillsetthepintothelogicallow(0V)asfollows:
LED_output=0
8. Wewillexecutethesamethingusinganinfinitewhileloop:
whileTrue:
LED_output=1
sleep(1)
LED_output=0
sleep(1)
9. ThiswillmaketheLEDblinkwitha1-seconddelay.Weshouldalsonotetheindentontheblinksequence.Theblinksequencehasadifferentindentcomparedtothewhileloop.Hence,thecodethatisatadifferentindentisexecutedinfinitely.
10. Whentheprogramisinterrupted(bypressingCTRL+Conthekeyboard),weneedtounexportthepinsatexit:
out_pin.unexport()
Analternativetoquick2wire–RPi.GPIO1. AnotheralternativeistouseRPi.GPIO(https://pypi.python.org/pypi/RPi.GPIO).It
comesasastandardpackagealongwiththeRaspbianWheezyOS.Let’sperformaquickreviewofthecode:
importRPi.GPIOasGPIO
fromtimeimportsleep
GPIO.setmode(GPIO.BCM)
GPIO.setup(8,GPIO.OUT)
GPIO.output(8,GPIO.LOW)
whileTrue:
GPIO.output(8,GPIO.HIGH)
sleep(1)
GPIO.output(8,GPIO.LOW)
sleep(1)
GPIO.cleanup()
2. Afterimportingtherequiredmodules,wegetstartedwithsettingupthepinnumberingmode.Therearetwotypesofpinnumberingmodes,namely:
TheBCMPinnumberingmode:Thepinnumbersarebaseduponthepin
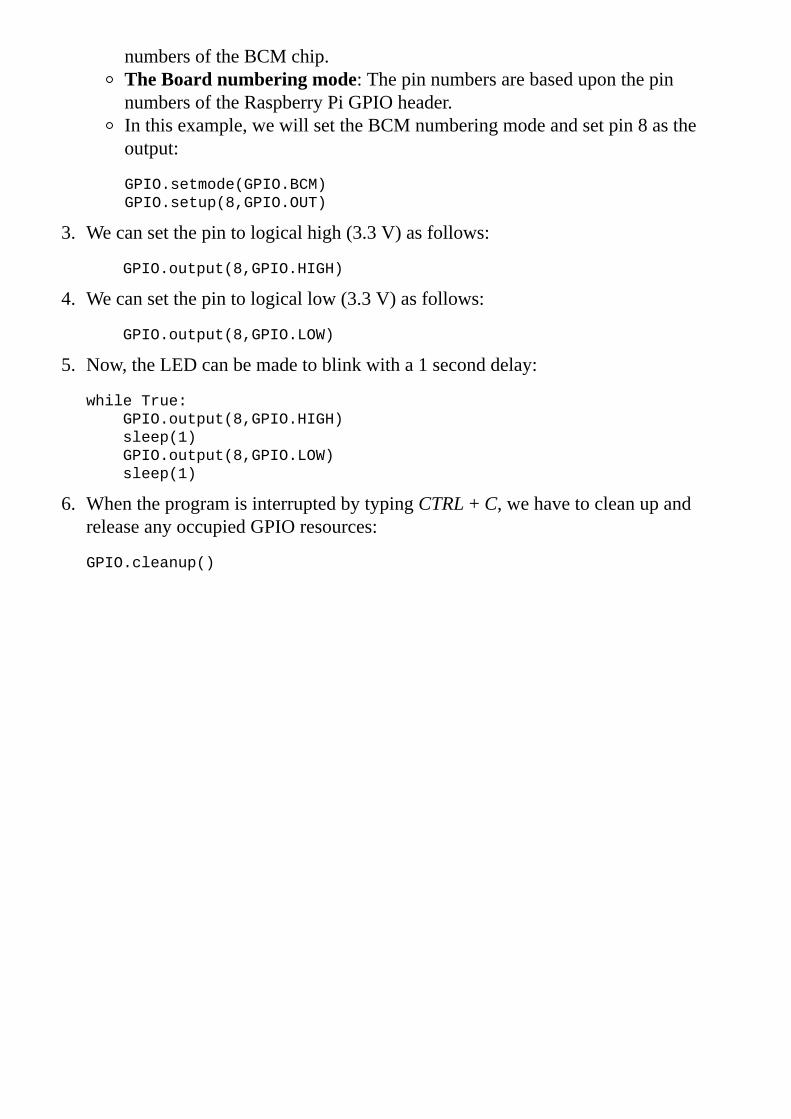
numbersoftheBCMchip.TheBoardnumberingmode:ThepinnumbersarebaseduponthepinnumbersoftheRaspberryPiGPIOheader.Inthisexample,wewillsettheBCMnumberingmodeandsetpin8astheoutput:
GPIO.setmode(GPIO.BCM)
GPIO.setup(8,GPIO.OUT)
3. Wecansetthepintologicalhigh(3.3V)asfollows:
GPIO.output(8,GPIO.HIGH)
4. Wecansetthepintologicallow(3.3V)asfollows:
GPIO.output(8,GPIO.LOW)
5. Now,theLEDcanbemadetoblinkwitha1seconddelay:
whileTrue:
GPIO.output(8,GPIO.HIGH)
sleep(1)
GPIO.output(8,GPIO.LOW)
sleep(1)
6. WhentheprogramisinterruptedbytypingCTRL+C,wehavetocleanupandreleaseanyoccupiedGPIOresources:
GPIO.cleanup()

Objectivecomplete–minidebriefingInthissection,wefinishedwritingaprogramtomakeanLEDblink.Inthenextsection,wewillputacircuittogetherthatmakesanLEDblink.


ElectricaloutputofourprogramIntheprevioussection,wewroteaprogramtomakeanLEDblink.Let’slookattheelectricalconnectiontoobservetheoutputofourprogram.WewillconnectaresistorbetweentheGPIOpinandtheanodeoftheLED.WewillconnectthecathodetothegroundpinoftheRaspberryPi.

EngagethrustersWewillconnecttheLEDandtheresistortotheGPIOpinandthegroundpin,asshowninthisimage:
LEDblinkingcircuit
NoteIfwearenotcarefulwiththehandlingoftheRaspberryPiGPIOpins,itmayeithertemporarilyresettheRaspberryPiorsometimesevenpermanentlydamagetheGPIOpin.ThereareseveraltutorialsinbasicelectronicsavailableovertheWeb.Itisimportantthatyoufamiliarizeyourselfwiththebasicsofelectronics.
Onceweconnectthecircuitasshownintheprecedingimage,wewillbeabletoexecutetheprogramandconcludeourexperiment.
Wecanexecutetheprogrambyrunningthemodule,asshowninthefollowingscreenshot:

ExecutingthePythonexample

Objectivecomplete–minidebriefingThat’sit!WehavewetourfeetbysayingHelloWorldbyblinkinganLED!Onourwaytobiggerandbetterthings,let’sstopandexaminethePiCrustforamoment.
IntroductiontothePiCrust–aprototypingplatformfortheRaspberryPiNowthatourHelloWorldexampleisdone,wewillleaveyouwithonemorething.Throughoutthisbook,wewillreviewsomeadd-onhardwaretoaccesstheGPIOperipheralsontheRaspberryPi.Inthisproject,wewilldiscussthePiCrustboardfortheRaspberryPi.
ThePiCrustboardwasdesignedbyJoeWalnes.ItisaboardthatisstackableontheRaspberryPiandeliminatestheneedforabreadboardtoprototypecircuits.
APiCrustboard
ThePiCrustisanopensourceadd-onhardwareandcostsapproximately$14tobuildoneourselves.Thedesigncanbedownloadedfreeofcostfromhttp://picru.st.
So,itisuptoyoutodecidewhetheryouwanttosimplybuyone,buildone,orasweare

pronetoencourage,improveuponitandopensourceitforotherstobenefit!
ThemainadvantagebehindPiCrustisthatitisaidsprototyping.ItallowseasyaccesstotheI2Cinterface,SPIinterface,UARTport,andtheGPIOpins.ThefollowingfigureshowsBlinkM—anI2C-drivenRGBLEDmountedontopofthePiCrust.
PiCruststackedontopoftheRaspberryPi


MissionaccomplishedNowthatyouhavetraveledthisfarwithus,howdoyoufeel?Doyouneedabreak,ormorecoffee?Beforeyoudoeither,let’sreview.
Inthisproject,wegotstartedwiththeLEDblinkingexampleusingtheRaspberryPi.WediscussedthesetupofGPIOperipheralsandusingtheminanexperiment.YouarewelcometocontinueexperimentswiththeGPIOperipheralswithprojectssuchasLEDsequencing,threebitcounter,andsoon.
Intheforthcomingprojects,wewilllookintoI2Ccommunication,SPIcommunication,andUARTcommunication(serialport).


HotshotchallengeWelldone;youhavetaughtyourPitosay“HelloWorld”!However,wearesureyoucandomore,muchmore.HaveyouwatchedthemovieCloseEncountersoftheThirdKind?Well,ifnot,youshould.However,thisisnotachallengeinitself.Inthemovie,thehumanbeingsattemptatcommunicationwithwhattheybelieveisaliensbybuildingapatternoflightsthataresettomusic.CanyoumakeapatternofLEDsrepeatthatorsomethingsimilar?


Chapter2.ARaspberryWebIDEExampleInthisproject,wewilllearnhowtodevelopprojectsusingtheWebIDEfromAdafruitIndustries.WewillflashanSDcardwiththeRaspbianOS,installtheOccidentalistool(https://learn.adafruit.com/adafruit-raspberry-pi-educational-linux-distro/occidentalis-v0-dot-3),setuptheweb-baseddevelopmenttool,andtestthesetupusinganexample.
NoteOccidentaliswasinitiallyavailableasaRaspbianOSimagebyAdafruitIndustries.ItcomprisedofthetoolsetthatenabledtogetstartedwithprojectdevelopmentusingtheRaspberryPi.TheOSimagewasdeprecatedandreleasedafterwefinishedwritingthebook.Wehavetakenourbestefforttoupdatethebook.Pleaserefertothisbook’swebsiteformoreinformation.

MissionbriefingInthisproject,wewilldiscussinstallingatool,Occidentalis,andaWebIDEthatenablesprogramminginthePythonlanguageontheRaspberryPi.WewillalsodiscussoneexamplefromtheAdafruitrepositoryandanotherexampleofdrivinganRGBLED.
Thefollowingtableliststhebillofmaterialsusedinthisproject.Thesearejustexamples,andalternativeproductsthathaveasimilarspecificationmayalsobeused.
Item EstimatedCost
RaspberryPiModelB 35USD
AdafruitCobbler(https://www.adafruit.com/product/914) 7USD
Adafruit7-segmentLEDBackpack(https://www.adafruit.com/product/879) 10USD
Blinkm(https://www.sparkfun.com/products/8579) 13USD

Whyisitawesome?TheAdafruitWebIDEincombinationwiththeOccidentalisoperatingsystemenablesdevelopmentinthePythonlanguageonaRaspberryPiusingjustawebbrowser.ItalsoenablesaccesstosampleprojectsdevelopedbyAdafruitviaBitbucket,asourcecontroltool.(IfyouarenotfamiliarwithsourcecontroltoolssuchasBitbucket,Git,andsoon,theexamplesinthisprojectareagreatwaytogetstarted!)TheAdafruitWebIDEisatooldevelopedforhobbyistsandcomeswithexamplesfortechniquessuchaspulse-widthmodulation(usedinlightingsystemcontrol)andI2Ccommunication,andalsoprovidesexamplesforcontrollingproductsfromAdafruit.
NoteTheAdafruitWebIDEisnowabetareleaseanditmaynotworksuccessfullyacrossdifferentplatforms.TheAdafruitlearningsystemhasindicatedthatthisdevelopmenttoolwasdirectedtowardsadvancedhobbyists.Wehavetakenourbesteffortstoexplainitassimplyaspossible.
Pulse-widthmodulationisatechniqueusedwidelyinmotorcontrol,lightingsystems,andsoon.Itisatechniquewheretheaveragevoltageappliedtoadeviceisvariedbychangingthewidthofthepulse.Thereareseveraltutorialsonpulse-widthmodulation(https://learn.sparkfun.com/tutorials/pulse-width-modulation)availableallovertheWeb.
I2Ccommunication(https://learn.sparkfun.com/tutorials/i2c)isaformofserialcommunicationinterfaceusedtoconnectmultipleslavedevices(usuallysensors)withamasterdevice(RaspberryPioramicrocontroller)throughacommoninterface.

YourHotshotobjectivesInthisproject,wewilldiscussthefollowingfeatures:
BootstrappingyourRaspberryPibyinstallingOccidentalisSetupofremoteloginintotheRaspberryPiInstallationoftheRaspberryPiWebIDEPythondevelopmentontheWebIDETestanddebuggingexamplesusingtheWebIDE
NoteThisprojectshouldnotbeconsideredasanattempttopromoteAdafruitIndustriesortheirproductsdevelopedfortheirplatform.ThisprojectmerelydemonstratessimplificationofdevelopmentontheRaspberryPiusingatoolfromAdafruitIndustries.

MissionchecklistInordertogetstarted,thefirststepistoinstalltheOccidentalisdistro,whichisaderivativeoftheRaspbianoperatingsystem.
Thethingsrequiredtogetstartedareasfollows:
A4GBSDcardflashedwiththeRaspbianOSAnOccidentalisimage.AnEthernetcable


Installation,features,andusageoftheOccidentalisoperatingsystemfromAdafruitThefirststepisinstallingOccidentalisontheRaspberryPi.

PrepareforliftoffThefirststepistheinstallationoftheAdafruit-Pi-Findertool.Thetoolcanbedownloadedfromhttps://github.com/adafruit/Adafruit-Pi-Finder/releases/latest.ItisavailableforWindows,Linux,andMacplatforms.

Engagethrusters1. YoucanfinddetailedinstructionsoninstallingtheOccidentalistoolat
https://github.com/adafruit/Adafruit-Pi-Finder.2. Alternatively,astep-by-stepinstructionisalsoavailableonthisbook’swebsite.We
cannotincludethemheresincechangesweremadetoOccidentalisinstallationprocessafterwefinishedwritingthisbook.

Objectivecomplete–minidebriefingOncetheinstallationiscomplete,wehavetoensurethattheRaspberryPiaswellasthedevelopmentmachineareconnectedtothenetworkviatheEthernetportoraUSBWi-Fidongle.


SetupofaremoteloginintotheRaspberryPiInthissection,wewillremotelylogintotheRaspberryPiusingasecureshell.SincetheRaspberryPicomeswithsshdenabled,itispossibletologinremotelyusingthelocalname,raspberrypi.local(Duringthebootstrappingprocess,theavahi-daemontoolisinstalledandhence,itispossibletoremotelylogintotheRaspberryPiusingthelocalname,raspberrypi.local).Alternatively,onaWindowsmachine,youcanuseatoolsuchasAdvancedIPScanner(http://www.advanced-ip-scanner.com/)tofindtheIPaddressoftheRaspberryPi.Asnapshotofthistoolisshownlaterinthisproject.
NoteIfyouareusingaWindowsmachine,theBonjourPrintServicesdrivershavetobeinstalledtoremotelyloginusingthelocalname,raspberrypi.local.TheBonjourPrintServicesdriversareavailablefromhttp://support.apple.com/kb/DL999.
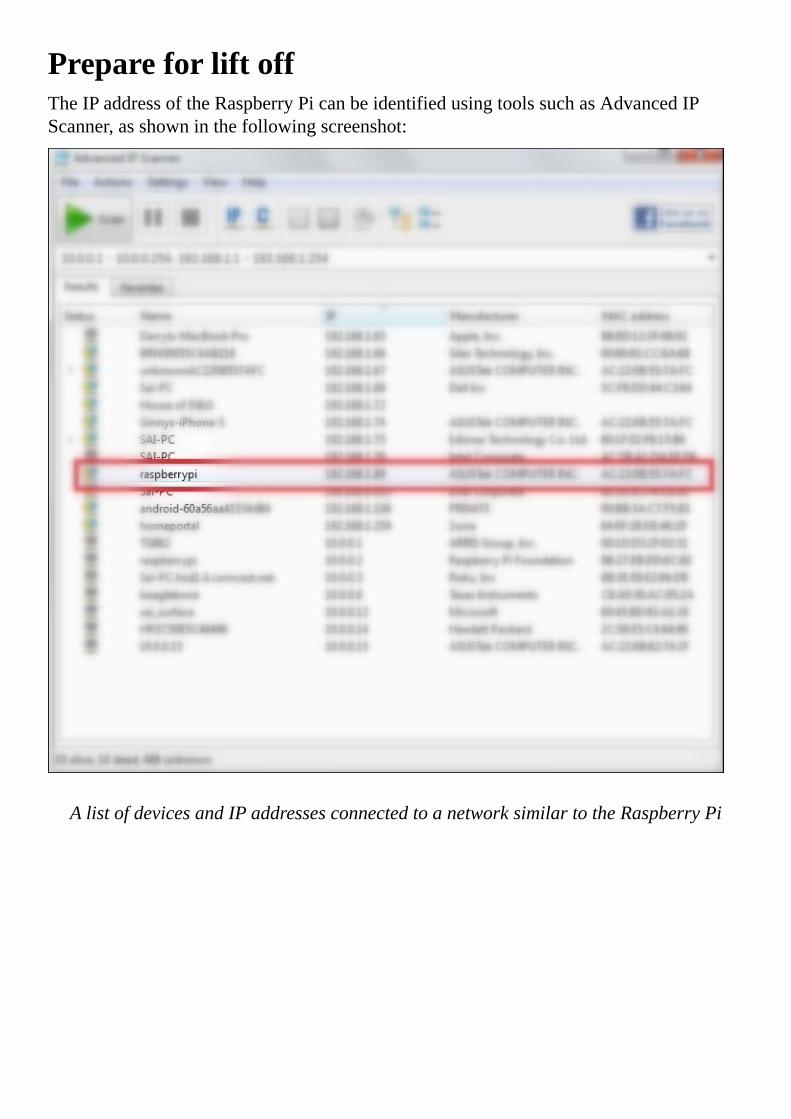
PrepareforliftoffTheIPaddressoftheRaspberryPicanbeidentifiedusingtoolssuchasAdvancedIPScanner,asshowninthefollowingscreenshot:
AlistofdevicesandIPaddressesconnectedtoanetworksimilartotheRaspberryPi

Engagethrusters1. OnceweknowtheIPaddress,weuseanSSHclientsuchasPuTTYonWindowsora
command-lineterminalonaLinuxoraMacmachinetoremotelylogintothemachine(inthiscase,weshowthisonaWindowsmachine).
2. OnaWindowsmachine,weeitherusetheIPaddressoftheRaspberryPioritslocalname(raspberrypi.local)andlogintotheRaspberryPi,asshowninthefollowingscreenshot:
3. OnceweentertheIPaddress/localnameinthePuTTywindow,weloginasfollows:
loginas:pi
<username>@<ipaddress>'spassword:raspberry
Alternatively,wecanalsologinusingtheIPaddressoftheRaspberryPiinsteadofthelocalname,raspberrypi.local.

Objectivecomplete–minidebriefingIftheusernameandpasswordareenteredcorrectly,weshouldbeabletoremotelylogintotheRaspberryPitoinstallthewebserver.


InstallationoftheRaspberryPiWebIDEWewillgetstartedbyusingaremoteloginclientsuchasPuTTYtoremotelylogintotheRaspberryPiandinstalltheAdafruitWebIDE.InordertogetstartedwithexamplesfromtheAdafruitrepository,weneedaBitbucketaccount,andAdafruitprovidesdetailedinstructionsforthisathttp://learn.adafruit.com/webide/getting-started.

Engagethrusters1. Oncewehaveloggedin,theAdafruitlearningsystem’swebsiterecommends
executingthefollowingtoinstallthewebserver:
curlhttps://raw.githubusercontent.com/adafruit/Adafruit-
WebIDE/master/scripts/install.sh|sudosh
2. Itshouldtakeaboutfiveminutestofinishtheinstallation.Iftheinstallationwassuccessful,weshouldbeabletoseethemessagemarkedinthefollowingscreenshot:
SuccessfulcompletionoftheAdafruitWebIDEinstallation
3. Assumingtheinstallationwassuccessful,weshouldbeabletolaunchtheAdafruitWebIDEusinghttp://raspberrypi.local.

AdafruitWebIDElaunchedforthefirsttime
4. InordertomakeuseoftheexamplesfromAdafruitIndustries,weneedtocreateaBitbucketaccount(itispossibletocreateonewithaGoogleaccount)andintegratetheWebIDEwiththeBitbucketaccount.Theinstructionsforthisareprovidedonthewebpage,asshownintheprecedingscreenshot.

Objectivecomplete–minidebriefingIftheinstallationwassuccessful,aftercompletionoftheregistration,wearedonewiththistask.Let’smoveonandlearntocodeusingtheWebIDE!


PythondevelopmentontheWebIDEInthissection,wewillusea7-segmentLEDbackpackandtheAdafruitCobbleralongwitha26-pinribboncable.WewilltestanexamplefromtheAdafruitrepository(https://github.com/adafruit/Adafruit-Raspberry-Pi-Python-Code).Inthisproject,thenewadd-onhardwarethatwewilldiscussistheAdafruitCobbler.TheCobblerisasmallboardthataidsprototypingcircuitsonabreadboard.TheAdafruitCobblercostsabout7USDwhiletheribboncablecostsabout3USDandthe7-segmentbackpackcostsabout10USD.
NoteTheearliermentionedproductsaremerelyexamplestodemonstratetheAdafruitWebIDE.Therearealternativeprototypingplatformsandproductsavailableforahigherorlowerprice.
TheCobblermountedonabreadboard

PrepareforliftoffInordertogetstartedwiththeprototyping,the26-pinribboncableisusedtoconnecttheGPIOinterfacetotheCobbler,asshowninthefollowingimage.Wehavetoensurethatpin1oftheGPIOheadermatchespin1oftheAdafruitCobbler.(TheCobblercomeswithashroudedheader,andhenceitisfoolproof.However,pin1oftheRaspberryPineedstobematchedcorrectly.)
QuickintroductiontotheI2CinterfaceTheI2CinterfacewasinventedbyPhillipsSemiconductors.Itisaformofserialcommunicationinterfaceusedtoconnectmultipleslavedevices(usuallysensors)withamasterdevice(RaspberryPioramicrocontroller)throughacommoninterface.Eachdevicehasauniqueaddressthatisusedbythemastertoreadorwritedata.ThereareplentyofresourcesavailabletofamiliarizeourselveswiththeI2Cinterface.Wewillmoveontothenextstageofconfiguringtheinterface.
ConfiguringtheI2CinterfaceontheRaspberryPiIntheOccidentalisdistribution,theI2Cdriversareinstalledandenabledbydefault.Hence,wecangetstartedbyconnectingtheAdafruit7-segmentbackpacktotheAdafruitCobbler,asshowninthefollowingimage.(ConnectionsbetweentheCobblerandthe7-segmentbackpackareClockpin,SCL(C)-SCL(B)DataPin-SDA(C)-SDA(B),3V3(C)to+(B)GND(C)to-(B),whereCistheCobblerandBisthebackpack):

7-segmentbackpackconnectionsonabreadboard
NowthatwehaveconnectedtheRaspberryPi,theAdafruitCobbler,andthe7-segmentbackpack,let’sgetstartedwiththedetectionofthebackpackontheRaspberryPi’sI2Cinterfaceandprogramanexample.
Beforewegetstartedwiththeexample,weneedtodeterminetheI2Cbustowhichthedeviceisconnectedbyusingthefollowingcommand:
sudoi2cdetect–y0
Thecommandoutputsatablethatcontainsthelistofdevicesforthatparticularbus.Sincetherearenodevicesconnectedtobus0,wescanfordevicesonbus1.Inthisexperiment,wearetestingtheAdafruit7-segmentbackpack.Inthefigurethatfollows,the7-segmentbackpackisconnectedtobus1andthedeviceaddressis0x70.Refertothefollowingscreenshot:

Thei2cdetectoutput
Weshouldchangethebusaddressinthecodetodrivethe7-segmentbackpack.Line11intheAdafruit_I2C.pyfileneedstobechangedinthecodeaccordingtothebustowhichthedeviceisconnected.Hence,line11shouldbe:
def__init__(self,address,bus=smbus.SMBus(1),debug=False):

Engagethrusters1. The7-segmentbackpackisadevicecontrolledviaanI2Cport.AnyI2Cdevicehas
fourpins,namelyclock,data,powersupply,andground.TheI2CdeviceneedstobeconnectedtotheCobbler,asshownintheearlierscreenshot.
2. ThereareseveralexamplesavailablefromAdafruitintheWebIDE.Let’slocatetheex_7segment_clock.pyexample(intheIDE,itislocatedatAdafruit_Raspberry-Pi-Python-Code|ex_7segment_clock.py).Thisisasimpleexampletodisplaythecurrenttimeonthe7-segmentbackpack:
Theex_7segment_clock.pyfilelocationintheWebIDE
3. Let’sdoaquickreviewoftheprogram.WegetstartedbyimportingthedatetimeandAdafruit_7Segmentmodules:
ThesegmentvariableisinitializedasaninstanceofanI2Cdeviceattheaddress0x70.Weenteraninfiniteloopandgetthecurrenttimeusingthedatetimemodule:
now=datetime.datetime.now()
hour=now.hour
minute=now.minute
second=now.second
Sincethe7-segmentLEDbackpackconsistsoffourdigits,wewritethecurrenttimeateachpositionasfollowsalongwithacolon:
#Sethours
segment.writeDigit(0,int(hour/10))#Tens
segment.writeDigit(1,hour%10)#Ones
#Setminutes
segment.writeDigit(3,int(minute/10))#Tens
segment.writeDigit(4,minute%10)#Ones

#Togglecolon
segment.setColon(second%2)#Togglecolonat1Hz
#Waitonesecond
Thisexerciseisrepeatedwithaonesecondinterval.
4. TheprogramisexecutedbyclickingonRunfoundintheIDE.Ifourconnectionswereright,weshouldbeabletoseethecurrenttimeonthe7-segmentdisplay(showninthefollowingfigure).

Objectivecomplete–minidebriefingWewereabletotestanAdafruitproductusingtheirWebIDEinthissection.
A7-segmentbackpackconnectedtotheCobbler


TestanddebuggingexamplesusingtheWebIDEInthisexample,wewillconnecttheBlinkMtotheRaspberryPi.ABlinkMisanRGBLEDthatcanbeconnectedtoyourRaspberryPiviatheI2Cinterface.Itispossibletoexecutelightscriptsusingtheport.TheconnectionstotheBlinkMaresimilartothatofthe7-segmentbackpack.
BlinkMconnectedtotheCobbler
NoteItisimportanttopayattentionwhileconnectingdevicestotheGPIOheaderoftheRaspberryPi.IftherearedevicesthatdrawalotofcurrentfromtheGPIOpins,itmayresetthePiorpermanentlydamageitintheeventofashortcircuit.Itisassumedthatyouarefamiliarwithbasicelectronicsandcapableofhandlingsuchdevices.

PrepareforliftoffSimilartothepreviousexperiment,weneedtodeterminethebustowhichthedeviceisconnectedusingthei2cdetectcommand.Asshowninthefollowingscreenshot,thedeviceisconnectedtobus1andthedeviceaddressis0x09:
Blinkmconnectedtobus1

Engagethrusters1. TheBlinkMdatasheet
(thingm.com/fileadmin/thingm/downloads/BlinkM_datasheet.pdf)providesstep-by-stepinformationtoexecutethelightscripts.
2. AlistofscriptsavailableontheBlinkMisshowninthefollowingscreenshot:
AlistofscriptsavailableontheBlinkM
3. Let’sseethecodetoexecutealightscript(forexample,scriptnumber6)ontheBlinkMusingtheAdafruitWebIDEinterface.Inordertoexecuteascriptforever,thedatasheetmentionsthatthefollowingcharactersshouldbewrittenattheI2Cdeviceaddressinthefollowingsequence:'p',<scriptno>,0,0.Let’sdiscusshowtoexecutethisusingaPythonscriptontheRaspberryPiinterfacedwiththeBlinkMLED.ThePythonscriptofthisexampleiscalledPlay_blinkm.py:

ThePlay_blinkm.pyfilecanbeexecutedbycreatinganewfileintherepositorythatwascreatedwhenyousignedupforaBitbucketaccount.Whenthefileissaved,thechangesaresavedtoyourBitbucketaccount.Thecodeforthisisgivenasfollows:
#!/usr/bin/python
#python-smbus
importsmbus
#createi2cobject
bus=smbus.SMBus(1)
#refertodatasheetforscriptsequence
#Playscriptbywriting0x70orponthebus
bus.write_byte(0x09,0x70)
#playscriptno:6
bus.write_byte(0x09,0x06)
#playthescriptinfinitely
bus.write_byte(0x09,0x00)
bus.write_byte(0x09,0x00)
Thefirstlineofthiscodeiscalledshebang.ItindicatesthatthescripthastobeexecutedusingPython.Weneedtoimportpython-smbustoexecutethelightscript:
importsmbus
WeneedtocreateanobjectforI2Ccommunication.Weneedtowritethecontrolscriptviabus1.Thisisdonebythefollowinglineofcode:
bus=smbus.SMBus(1)
Inordertoplayascript(scriptnumber6inthiscase)forever,wewrite'p',<scriptno>,0,0ontheI2Cbusasfollows:
bus.write_byte(0x09,0x70)
bus.write_byte(0x09,0x06)
bus.write_byte(0x09,0x00)
bus.write_byte(0x09,0x00)
4. ThiswouldcausetheBlinkMtoexecutescriptnumber6aslongasthedeviceispoweredanduntilanotherinstructionhasbeenissuedtothedevicethroughtheI2Cinterface.
5. Now,itispossibletodebugourprogrambyexecutingitstepbystep.Thishelpsidentifyanyproblemswiththeprogram.Let’sreviewsomeoptionstodebugaprogram.Wecanlaunchtheprogramfortroubleshooting/debuggingbyclickingonDebug.
TheAdafruitWebIDEtoolbar
Thisopensuptwoconsoles,DebugOutputandDebugVariables(shownin

thefollowingscreenshot).ThewindowDebugOutputprintsanyoutputoftheprogram.Ifweincludedanyprintstatementsinourprogram,theoutputisdisplayedinthiswindow.Thiswindowcanbeusedtoviewanyresults,ensurethataparticularcallbackfunctionwasexecuted,ordeterminewhethertheprogramexecutiongotpastaparticularlineoftheprogram.TheDebugVariableswindowdisplaysthestateofvariablesastheprogramisbeingexecuted.BoththewindowsarehelpfulindeterminingwhetheraPythonscriptwaswrittenasintended.
Debugterminals
WhenwestartdebuggingaPythonscript,thetoolbaratthetoppresentsuswithtwooptions,namelyStepOverandStepIn,asshowninthefollowingscreenshot:
TheAdafruitdebugtoolbar
Inthisexample,itispossibletotesttheexecutionofcommandsbysteppingthrougheachlineofthescript.Thisisreallyusefulwhendevices(forexample,apressuresensor)arenotprovidingtheintendedoutputtoidentifytherootcause.

Objectivecomplete–minidebriefingInthissection,weinterfacedandcontrolledanRGBLEDusinganI2CinterfaceanddiscussedsomeoptionsavailablefordebuggingintheAdafruitWebIDE.
TheAdafruitWebIDEcanconsiderablyreducetheturnaroundtimeforanyprojectdevelopmentactivity.


MissionaccomplishedInthisproject,weworkedontwosimpleexperimentsusingtheI2CinterfaceontheRaspberryPi.ThetwoexamplesdiscussedusingtheAdafruitWebIDEreflectthefactthatthetoolcanhelpsavetimeforanyelectronicsprojectinvolvingaRaspberryPisinceitcomeswithsomeoftheprerequisitesinstalledalongwithawebinterfacethatjustmakesremotedevelopmenteasier.
WehopethatyouhadfuntakingtheOccidentalisdistributionforatestdriveandfinditusefulinyourprojects.


HotshotchallengeInthisproject,weusedtwodifferenttypesofI2Cdevices,thatis,anLEDbackpackandanRGBLED.ItispossibletoconnectmultipleI2Cdevicestothesameinterface.Howcanthisbeachieved?HowcanweidentifytheaddressesoftheseI2Cinterface-enableddevicesandcontrolthem?


Chapter3.TheArduinoRaspberryPiInterfaceInthisproject,wewilllookintointerfacingtheRaspberryPitotheArduinomicrocontrollerdevelopmentplatform.Arduino(www.arduino.cc)isapopularmicrocontrollerplatformthatiswidelyusedtoprototypedifferentprojects.WewilldiscussinstallationoftheArduinodevelopmentenvironmentanddiscussanexampleofitsusage.
RaspberryPiandArduinohavebecomepopularplatformsamonghobbyists,anditisbeingwidelyusedbypeoplefromdifferentbackgrounds,includingschoolanduniversitystudents,artists,andengineers.ThisprojectexplainshowtheRaspberryPicanbeusedincombinationwithArduino.
NoteTheRaspberryPicomeswithaGPIOpinsetthatisquitecapableofinterfacingandcontroldevices.WewouldliketodiscusstheArduinoRaspberryPiinterfacebecauseyoumayhaveprojectsthatwereoriginallybuiltusinganArduino,especiallyinscenarioswherearemotefirmwareupdateneedstobeperformedontheArduinoplatformusingtheRaspberryPi.ThisprojectpresentstheoptionsofenhancingthecapabilitiesoftheArduinomicrocontrollerusingaRaspberryPi.

MissionbriefingInthefirstpartoftheproject,wewilldiscussprogrammingtheArduinoforthefirsttime,andinthesecondhalf,wewilllookintothecontrolofaWeasleyweatherclock.WewillalsolookintotheRaspberryPiAlaMode,stackableadd-onarduinohardware(http://wyolum.com/projects/alamode/).

Whyisitawesome?ArduinoisanopensourcemicrocontrollerdevelopmentplatformbasedontheAtmelseriesofmicrocontrollers.Ithasbroughtengineers,artists,andstudentstothesametable.Theprogramminginterface(programsarewritteninC/C++usually)issosimpleandthiswasthesolereasonthatmadetheplatformsopopular.Hence,itiswidelyusedforprototypinginproductdevelopment.
Overtheyears,therehavebeenseveralhardwareadd-onsthataidedinhardwaredevelopmentusingtheArduino.Someoftheseadd-onscanbestackedontopoftheArduinodevelopmentplatform,andtheyarecommonlyreferredtoasshields.Thereareshieldsformedicaldevices,interfacingsensors,GPSunits,andactuatorssuchassteppermotors,servomotors,andsoon.TheecosystemofthegadgetsthatarebuiltaroundtheArduinoissovastthatthemicrocontrollerplatformwaslaunchedintothestratospherealongwithaheliumballoon.
WherecanyoubuyanArduino?SincetheArduinoisanopensourcemicrocontrollerboard,therearemanyresellersfortheproduct.ThebasicversionoftheArduinoistheArduinoUnoandcostsabout$29.95.Arduino-relatedproductsaresoldatwebsitessuchasSparkfun,Adafruit,andSeeedStudio.

YourHotshotobjectivesInthisproject,wewilldothefollowing:
InstalltheArduinoIDEProgramtheArduinousingtheRaspberryPiRaspberryPiAlaMode(oranyotherArduinodevelopmentboard)IntroductiontoWeasleyWeatherClockandBillofMaterialsControlthestepperusingtheArduinoControltheRGBLEDStripusingtheArduinoI2CCommunicationusingtheArduino(optional)SerialportcommunicationwiththeRaspberryPi

MissionchecklistWeneedaRaspberryPialongwithanSDcardflashedwiththeRaspbianOS,amicroUSBpowercable,displaysetup,andanArduinotogetstarted.Inthelatersectionofthisproject,wewillneedsomeadditionalhardwaresuchasRGBLEDStrips,motors,wires,andsoon.


InstallingtheArduinoIDEInthissection,wewillinstalltheArduinoIDEontheRaspberryPi.

PrepareforliftoffAnArduinomicrocontrollerdevelopmentplatform(anyvariantthatcouldbeprogrammedusingtheArduinoIDEisfine)isabsolutelyessentialforthissectionoftheproject.

Engagethrusters1. TheIDEcouldbeinstalledbyexecutingthefollowingcommandinthecommand
lineterminal:
sudoapt-getinstallarduino
2. MostArduinoproductscomewithaUSBportandareprogrammedviatheUSBport(theArduinoenumeratesasaserialportdevice).IttakesawhiletodownloadandinstalltheArduinoIDE.Oncetheinstallationisfinished,wecantesttheinstallationbyexecutingthefollowingcommand:
arduino
TheArduinoIDEisshowninthefollowingscreenshot:
TheArduinoIDEinterface

Objectivecomplete–minidebriefingNowthatwehaveinstalledtheArduinoIDE,let’smoveontothenextsectionandrunanexampletestusingtheArduinodevelopmentplatform.

ProgrammingtheArduinousingtheRaspberryPiWewillintroduceourselvestotheArduinoIDEwithanLEDblinkingexample.

PrepareforliftoffThereareseveralexamplesfortheArduinoandittakeslessthanaminutetoexecutethefirstprogram.Let’sgetstartedwiththetraditionalLEDblinkingexample.TheLEDblinkingexamplecanbefoundatFile|Examples|01.Basics|Blink.

Engagethrusters1. WegetstartedbyidentifyingtheArduino’sserialportenumeratedontheRaspberry
Pi.2. TheserialportisidentifiedfromTools|SerialPort.Usuallythereisonlyoneserial
portasshowninthefollowingscreenshot.Ifthereismorethanoneserialportdeviceconnected,itisrecommendedthatyouproceedwithcaution.
3. WecanprogramtheArduinobyclickingontheUploadbutton.
TheArduinoIDEinterface
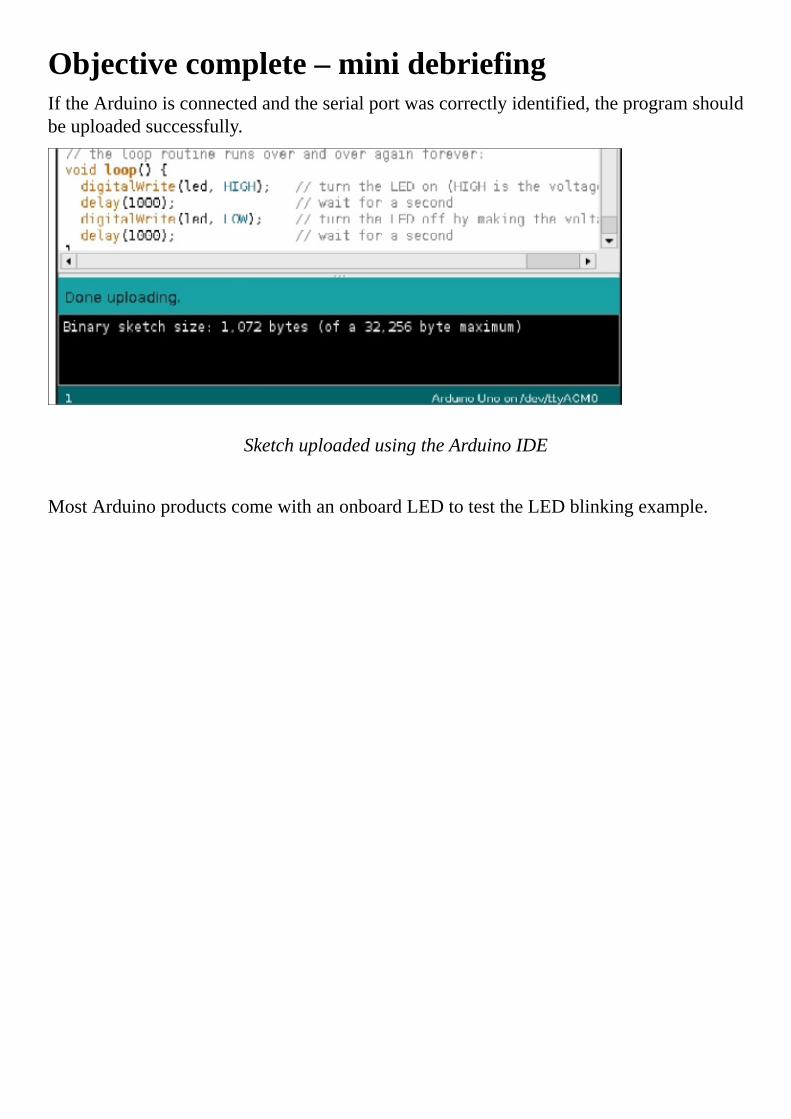
Objectivecomplete–minidebriefingIftheArduinoisconnectedandtheserialportwascorrectlyidentified,theprogramshouldbeuploadedsuccessfully.
SketchuploadedusingtheArduinoIDE
MostArduinoproductscomewithanonboardLEDtotesttheLEDblinkingexample.


RaspberryPiAlaModeInthissection,wewillbrieflydiscusstheRaspberryPiAlaMode’sfeaturesanditssetup.RaspberryPiAlaMode(asshowninthefollowingfigure)isastackableArduinodevelopmentplatformdevelopedspecificallyfortheRaspberryPi.Theboard,whichisreleasedasopensourcehardware,ispricedatabout$45andalsoincludesareal-timeclockandamicroSDcardslotfordatalogging.
RaspberryPiAlaModemodestackedontheRaspberryPi
PrepareforliftoffTheattractivefeatureoftheboardisthatitcouldbeprogrammedviatheRaspberryPi’sUARTpinsandhenceeliminatestheneedforaUSBport.TheboardcouldbeeitherpoweredviatheRaspberryPiorthroughtheMicroBUSBportusingawallwarttransformer.Theproduct’swebpage,http://wyolum.com/projects/alamode/alamode-getting-started/,offersasinglestepprocesstostartusingtheboard.
NoteTheRaspberryPiAlaModemodeisjustoneexampleofthestackableArduinohardware.ThereareprobablyothersimilarstackableArduinohardwareavailableinthemarket.Forexample,https://www.kickstarter.com/projects/raspitv/raspio-duino-affordable-arduino-programming-on-ras.

Engagethrusters1. Oncethearchiveisdownloadedfromtheirwebpage,weextractthecontents:
tar–xvzfalamode-setup.tar.gz
2. Oncethefilesareextracted,thesetupisasfollows:
sudo./setup
3. Aftertheinstallationiscomplete,theRaspberryPialamode’sserialportisenumeratedas/dev/ttyS0.

Objectivecomplete–minidebriefingAftertheinstallationiscomplete,weshouldhavetheRaspberryPiAlaModemodeenumeratedandbereadytostartprogrammingthehardwareadd-onboard.


TheWeasleyweatherclockWewillbuildaWeasleyweatherclockinthisprojectusinganArduinomicrocontrollerboardandtheRaspberryPi.TheWeasleyWeatherclockisinspiredbytheWeasleyclockseenintheHarryPotterseriesofmovies.AWeasleyclockisusedtoidentifythecurrentlocationofafamilymemberoftheWeasleys(forexample,work,school,andsoon)andalsothesafetyofthefamilymember.Mrs.MollyWeasley(thematriarchoftheWeasleys)usedtheWeasleyclocktokeeptabsonherfamilyandthisclockhashaditsvariantsovertheyears.Thisprojecthappenstobeoneofthem!
TheWeasleyweatherclockisonethatdisplaysthecurrentoutdoortemperatureandtheforecast.Italsowarnsusaboutimpendingdangersduetoconditionssuchastornadoes,blizzards,andsoon.
AWeasleyweatherclockbuiltusingtheArduinoandtheRaspberryPi

PrepareforliftoffThefollowingitems(alongwiththeirapproximatecost)arerequiredtobuildourWeasleyclock:
Item Price
RaspberryPimodelB*1 US$35
ArduinoUno/RaspberryPiAlaModemode(http://wyolum.com/projects/alamode/)*1 US$30/45
AcrylicSheet24inchesx20inches*0.093inchthick*1 US$10
Woodsheet1ftx1/2ftx0.25inchthick*1 US$5
5VDCSteppermotorfromAdafruit*1(http://www.adafruit.com/product/858) US$5
RGBLEDStrip1m*1(analogones(http://www.adafruit.com/products/1004)) US$15
NPNtransistors*2(BC547orNP2222) US$1
PowerDarlingtonStepperDriver(ULN2003A) US$2
Cablesforconnection US$4
7-SegmentBackpack(http://www.adafruit.com/product/879) US$10
A8x8LEDMatrixbackpack(optional(http://www.adafruit.com/product/871)) US$10
BlinkM(optional) US$13
12V,1ADCwalltransformer(optional(https://www.sparkfun.com/products/8579)) US$8
Totalcost US$122approx.

Engagethrusters1. TheWeasleyclockcouldbeeasilyassembledwithpartsmachinedwithalasercutter.
Lasercuttingisaprocesswherepartsaremachined/engraved/cutusingahigh-powerlaserbeaminacontrolledenvironment.Thelasercutteriswidelyusedforprototypingpurposes.Thedesignfilesforlasercuttingareavailablealongwiththisbookcodebundle.Inthisexample,thedialoftheweatherclockiscutfromtheacrylicandthedesignincludesmountingholesfortheclockaswellasthesteppermotor.Theweatherkeywordsareengravedandmachinedusingwoodsheets.Theassemblyofthekeywordsandthedialareshowninthefollowingfigure:
PartialassemblyoftheWeasleyClock

Objectivecomplete–minidebriefingTheassemblyshownintheimageissufficienttotestthisexample.Youcanaddmorefeaturestothedesign.Forexample,youcanaddslotsontheacrylicboardtoembeda7-Segmentdisplay,8x8LEDmatrix,oraBlinkMRGBLEDtothedesign.
Inthisexample,theArduinoisthelow-levelcontroller,whichdrivestheRGBLEDstrip,steppermotor,andsoon,whiletheweatherdataisobtainedfromtheInternetusingtheRaspberryPi.WewilldiscusstheArduinocodeinthefirstpartofourtask.
FlowofdataandcontrolinthisWeasleyClockproject


ControllingthestepperusingtheArduinoThepartnumberofthesteppermotorusedinthisexampleis28BJY-48(http://www.adafruit.com/product/858).Asteppermotorisatypeofmotorthatisoperatedbyenergizingitscoilsinseveralsteps.Thecoilenergizationinseveralstepsenablesthesteppertorotateinpreciseangularsteps.Thisprecisemovementaidstheuseofasteppermotorinopenloopsystems.Sincetheworkingprincipleofasteppermotorisbeyondthescopeofthebook,let’sdiscussitscontroltechnique.

PrepareforliftoffThesteppermotorispoweredbyacommonleadconnectedtothepowersupplyandtheotherendisconnectedtoatransistor.Sincetransistorscanbeusedasswitches,theleadsofthecoilcanbegroundedalternatively.Thisalternativesequencecausesthesteppermotortorotateandthespeedofrotationiscontrolledbyintroducingadelayinbetweenthecoilenergization.Theminimumdelayrequiredbetweeneachenergizationsteptomakethestepperrotateproperlyandavoidmissstepsis2milliseconds.Thisisduetothedesignlimitationsofthesteppermotor.
Thefollowingtableshowsthecoilenergizationsequenceforthesteppermotorinaclockwisedirection(borrowedfromthedatasheet).Theenergizationsequenceshownherewouldmakethestepperrotateinahalfstepperactuation,thatis,thestepperwouldrotate2.8125degreesforeveryactuationsequence.
NoteItisassumedthatyouarefamiliarwithsteppermotorsandtheircontroltheory.
Asteppermotorenergizationsequencefrom28BJY-48’sdatasheet

Engagethrusters1. Eachcolumnintheprecedingdiagramindicatestheleadthatneedstobeenergizedto
rotateasinglestep.2. Forexample,inthecaseofclockwiserotation,Lead4isenergizedandallotherleads
areturnedoff.Thedatasheetexplainsthatthesteppermotorrotatesapproximately5.625degreesperstep.
3. Hence,64actuationstepsarerequired(64*5.626=360degrees)tomakeonecompleterotation.Thesteppermotorisinterfacedtoagearboxof1:64ratio,andeachrotationtakesabout4096steps.
4. Let’sreviewthecoderequiredfortheenergizationsequence(codeborrowedfromtheArduinoforumshttp://forum.arduino.cc/index.php?topic=85335.0):
//Step1
digitalWrite(motorPin4,HIGH);
digitalWrite(motorPin3,LOW);
digitalWrite(motorPin2,LOW);
digitalWrite(motorPin1,LOW);
delay(motorSpeed);
//Step2
digitalWrite(motorPin4,HIGH);
digitalWrite(motorPin3,HIGH);
digitalWrite(motorPin2,LOW);
digitalWrite(motorPin1,LOW);
delay(motorSpeed);
//Step3
digitalWrite(motorPin4,LOW);
digitalWrite(motorPin3,HIGH);
digitalWrite(motorPin2,LOW);
digitalWrite(motorPin1,LOW);
delay(motorSpeed);
//Step4
digitalWrite(motorPin4,LOW);
digitalWrite(motorPin3,HIGH);
digitalWrite(motorPin2,HIGH);
digitalWrite(motorPin1,LOW);
delay(motorSpeed);
//Step5
digitalWrite(motorPin4,LOW);
digitalWrite(motorPin3,LOW);
digitalWrite(motorPin2,HIGH);
digitalWrite(motorPin1,LOW);
delay(motorSpeed);
//Step6
digitalWrite(motorPin4,LOW);
digitalWrite(motorPin3,LOW);
digitalWrite(motorPin2,HIGH);
digitalWrite(motorPin1,HIGH);
delay(motorSpeed);
//Step7
digitalWrite(motorPin4,LOW);
digitalWrite(motorPin3,LOW);
digitalWrite(motorPin2,LOW);

digitalWrite(motorPin1,HIGH);delay(motorSpeed);
//Step8
digitalWrite(motorPin4,HIGH);
digitalWrite(motorPin3,LOW);
digitalWrite(motorPin2,LOW);
digitalWrite(motorPin1,HIGH);
delay(motorSpeed);
}
5. Let’sdiscussthefirststepinthesteppermotorenergizationsequence:
//Step1
digitalWrite(motorPin4,HIGH);
digitalWrite(motorPin3,LOW);
digitalWrite(motorPin2,LOW);
digitalWrite(motorPin1,LOW);
delay(motorSpeed);
6. Intheprecedinglinesofcode,themotorPin4pinissettoHigh,whiletheotherpinsaresettoLow.Asshowninthefollowingfigure,thepinsmotorPin1throughmotorPin4areconnectedtoapowerDarlingtoncircuit.YoucanfindareferencetothePowerDarlingtoncircuitathttps://coefs.uncc.edu/dlsharer/files/2012/04/F5.pdf.
AnArduinosteppermotorinterface
7. Whenmotorpin4(theD11pinoftheArduinoisconnectedtothebasepinofthepowerDarlingtonpair)issettohigh,thetransistor(whichactsaswitch)connectstheorangeleadtothegroundandenergizesthecoilandtherebythesteppermovesbyasinglestep.
8. Similarly,thesteppermotor’scoilsareenergizedinthesequenceshowninthetable.Forexample,instep2,thecoils4and3areenergizedbysettingmotorPin4andmotorPin3toHighandotherpinstoLow.
Counterclockwiserotationofthesteppermotor

1. Thecounterclockwiserotationisachievedbyreversingtheorderofenergization.Inthefirststep,Lead1isenergized,whichisfollowedbyLeads1and2.Thetableforcounterclockwiserotationisshownasfollows:
LeadWireColorCCWDirection
1 2 3 4 5 6 7 8
1BLU - -
2PIK - - -
3YEL - - -
4ORG - - -
2. Hence,thecodeforthefirststepwillbeasfollows:
digitalWrite(motorPin1,HIGH);
digitalWrite(motorPin2,LOW);
digitalWrite(motorPin3,LOW);
digitalWrite(motorPin4,LOW);
delay(motorSpeed);

Objectivecomplete–minidebriefingNoteIfyouarenotfamiliarwithsteppermotorsandtheircontroltechniques,thereareabundantresourcesandonesuchresourceishttp://www.societyofrobots.com/member_tutorials/node/314.
WediscussedthesteppermotorcontroltechniqueusingtheArduinomicrocontroller.Oncewehavediscussedtheprerequisites,wewilltakethiscodesampleandbuildthingsaroundit.


ControllingtheRGBLEDStripusingtheArduinoWedepictthemoodoftheweatherforecastbyusingRGBLEDlighting.Weindicatecoldweatherindicationswithbluecolorlighting,fairweatherconditionswithgreenlighting,andwarm/dangerousweatherconditionsusingredlighting.Inthissection,wewilllookintocontrollinganRGBLEDusingtheArduino.
TheRGBLEDstripsoldbyAdafruitindustries(http://www.adafruit.com/products/1004)consumesabout60mApersegment.ItisbestrecommendedtodrivetheRGBLEDstripusingatransistorswitchingcircuit.Weneedtousethreetransistorsforthethreecolorsanditispossibletocontroleachcolorindividuallyanditisalsopossibletoobtainacombinationofcolours.
NoteItispossibletoproduceasecondarycolorusingtheRGBcombinations.ThiscanbeachievedbyturningontheRGBsegmentsatthesametimeandvaryingthebrightnessoftheprimarycolors.TherearevastresourcesavailableforsuchtipsandtricksontheInternetandanexplanationofthisisbeyondthescopeofthisbook.

PrepareforliftoffTheAdafruitlearningwebsiteprovidesexamplesforcontrollingtheRGBLEDusingapulsewidthmodulationtechnique.TheschematicfortheAnalogRGBstripisshowninthefollowingdiagram:
RGBLEDstripschematic(borrowedfromAdafruit)
SincetheRGBstriprequires12V,wemustuseatransistorswitchingcircuittocontroltheLEDs.ThetransistorswitchingcircuitforcontrollingtheRed,Green,andBluechannelsoftheLEDstripisshowninthefollowingdiagram:
TheArduinoRGBswitchingcircuit
TheRGBchannelsareconnectedtotheNPNtransistorsthatactasswitches.ThebaseofthetransistorisconnectedtothePWM(PulseWidthModulation)outputoftheArduino.ThisenablesyoutoadjustthebrightnessoftheRGBchannels,andconsequently,producedifferentcolors.

Engagethrusters1. AdafruithasprovidedanexampleforadjustingthebrightnessoftheLEDsand
producingdifferentcolorsfromthecombinationofprimarycolors.Let’sconsiderthefollowingpieceofcode:
//fadefrombluetoviolet
for(r=0;r<256;r++){
analogWrite(REDPIN,r);
delay(FADESPEED);
}
//fadefromviolettored
for(b=255;b>0;b--){
analogWrite(BLUEPIN,b);
delay(FADESPEED);
}
2. Inthiscode,thered,greenandbluesegmentsoftheRGBLEDstripareconnectedtotheD3,D5,andD6oftheArduino,respectively.
ThevaluewrittentothepinsusingtheanalogWritefunctionsetsthebrightnessvalueofeachcolor.TheanalogWritefunctionvariesthedutycycleofthePWMchannelandacceptsvaluesbetween0and255.Thevalue0indicatesa0percentdutycycleand255indicatesa100percentdutycycle.ThedutycycledeterminesthecurrentthatflowsthroughtheLED,andinturn,controlsthebrightnessandcolor.

Objectivecomplete–minidebriefingWediscussedadjustingthebrightnessoftheRGBLEDstripusingthePulseWidthModulationTechniqueandanArduinomicrocontroller-baseddevelopmentplatform.


I2CCommunicationusingtheArduino(optional)Inthisproject,thereisa7-Segmentdisplay,8x8LEDmatrix,proximitysensor(todeterminethehomeposition),andaBlinkMRGBLEDthatcommunicatesviatheI2Cinterface.Wewilldiscusstheapplicationofeachcomponentinthisproject.

PrepareforliftoffThemainrequirementforthissectionisthenecessaryI2Cdevicerequiredtointerfacewiththeweatherclock.

EngagethrustersLetusreviewaboutthe7-Segmentdisplay.
The7-Segmentdisplay1. TheAdafruit7-Segmentdisplaybackpack(reference:thetutorialavailableat
https://learn.adafruit.com/adafruit-led-backpack/0-dot-56-seven-segment-backpackprovidesinstructionsonsettingupthebackpackandtestingthebackpackwithacodesample),whichisusedtodisplaythecurrentatmospherictemperatureobtainedviatheRaspberryPi.
2. Adafruitprovideslibrariestowritetothe7-Segmentdisplay.Inordertowritetothe7-Segmentdisplay,wedeclarea7-Segmentobject:
Adafruit_7segmentmatrix_7segment=Adafruit_7segment();
WeinitializetheI2CportaddressofthedeviceintheArduinosetup()function:
matrix_7segment.begin(0x70);
Now,wecancalltheobjectandwritedataonthedisplay(codeborrowedfromAdafruitLEDbackpacklibraries):
matrix_7segment.clear();
matrix_7segment.print(temp,DEC);
matrix_7segment.writeDisplay();
8x8LEDmatrix1. TheAdafruit8x8matrixisusedtodisplaythemoodofthecurrentweathercondition
usingasmiley.(Thesetuptutorialcanbefoundathttps://learn.adafruit.com/adafruit-led-backpack/0-8-8x8-matrix).
2. Ifthecurrentweatherconditionisfair,asmileisdisplayedandafrownisdisplayedforimpendingdanger.
3. Thewriteprocessissimilartothe7-Segmentdisplay.The7-Segmentdisplayandthe8x8displaymatrixusetheMAX7219chip.Hence,itisnecessarytouseadifferentaddressfortheLEDmatrix.TheAdafruittutorial(https://learn.adafruit.com/adafruit-led-backpack/connecting-multiple-backpacks)clearlyexplainshowtochangeI2CportaddressesontheLEDbackpack.Youarewelcometoswitchtheaddressifboththe7-SegmentdisplayandtheLEDmatrixarebeingusedintheproject.
4. Itisalsopossibletowritestringstothe8x8matrixandscrolllikeamarquee.Similartothe7-Segmentdisplay,wewillinitializetheobjecttocommunicatewiththeLEDmatrix:
Adafruit_8x8matrixmatrix=Adafruit_8x8matrix();
WeinitializetheI2CportaddressofthedeviceintheArduinosetup()function:
matrix_7segment.begin(0x73);
Adafruittutorialsalsoexplainthecreationofbitmapsforthesmileystobe

displayed:
staticuint8_t__attribute__((progmem))smile_bmp[]={0x3C,0x42,
0x95,0xA1,0xA1,0x95,0x42,0x3C};
staticuint8_t__attribute__((progmem))frown_bmp[]={0x3C,0x42,
0xA5,0x91,0x91,0xA5,0x42,0x3C};
staticuint8_t__attribute__((progmem))neutral_bmp[]={0x3C,0x42,
0x95,0x91,0x91,0x95,0x42,0x3C}
ThebitmapisusedtodeterminetheLEDsthatwouldhavetobeturnedontocreatethesmiley.Forexample,0x3C(binaryvalue:00111100)turnsontheLEDsexceptforthefirstandlasttwooneitherends:
matrix.clear();
matrix.setRotation(3);
matrix.drawBitmap(0,0,smile_bmp,8,8,LED_ON);
matrix.writeDisplay();
ThesetRotationfunctionisusedtorotatethedisplayimageby90degrees.ThedrawBitmapfunctionisusedtodrawthebitmaponthedisplay.InthedrawBitmapfunction,thefirsttwoargumentsspecifythexandyofthestartingpositionfollowedbythebitmap,width,heightofthebitmap,anditscolor.
BlinkM
1. WediscussedtheBlinkMRGBLEDinProject2,ARaspberryWebIDEExample.TheBlinkMisusedtoindicateimpendingdangerbyflashingaredcolorintheeventofimpendingdanger.WeusetheBlinkMlibrariestoplayaflashingredscriptinsuchscenarios:
BlinkM_playScript(script_no,0,0);
2. TheBlinkM_playScriptfunctiontakesthescriptnumberoftheRGBLED.Thesecondargumentisthenumberofrepeatsforthescript.Whenthethirdargumentiszero,thescriptisplayedinaninfiniteloop.
Proximitysensor
1. Theproximitysensorisusedtodeterminethehomepositionofthearrowthatisusedtopointtotheweatherposition.TheproximitysensorusedinthisprojectistheOSEPPProximitySensorModulefromParallax.TheproximitysensordetectsthepresenceofobjectsandcommunicatesthisviatheI2Ccommunicationport.
2. SimilartotheotherI2Cdevices,wesetthesensoraddressasfollows:
constuint8_tsensorAddr=0x20;
WeturnonthesensorintheArduinosetup()method:
WriteByte(sensorAddr,0x3,0xFE);
Thesensor’sreadingisreadby:
ReadByte(sensorAddr,0x0,&val)


Objectivecomplete–minidebriefingWediscussedtheinterfacingofdifferentI2Cdevicesthatcouldbeusedinthisproject.Inthenextsection,wewillworkoncontrollingthesedevicesusinganindividualcontrolsignal.


SerialportcommunicationwiththeRaspberryPiAsmentionedearlier,theweatherdataisobtainedbytheRaspberryPiandcommunicatesthedatawithcontrolcharactersviatheserialport.Wewilldiscussthecontrolsignalsusedinthisproject.

EngagethrustersLet’sgetstartedbyreviewingthePythonscriptusedtooperatetheweatherdisplay.
PythonprogramfortheWeasleyclock1. Inthissection,wewilldiscussthePythoncodefortheweatherclock.Theimportant
requirementforthisprojectisthePythonweatherAPI.Weneedtodownloadandinstallittogetstarted.IfsubversionisnotinstalledontheRaspberryPi,itcanbeinstalledusingthefollowingcommand:
sudoapt-getinstallsubversion
2. Oncetheinstallationiscomplete,thePythonweatherAPIrepositorycanbeclonedasfollows:
svncheckouthttp://python-weather-api.googlecode.com/svn/trunk/
python-weather-api-read-only
3. ThePythonweatherAPIhasaPython3requirementandisinstalledasfollows:
cdpython-weather-api-read-only
python3setup.pybuild
python3setup.pyinstall
4. Let’sreviewthePythonscriptusedtooperatetheweatherdisplay.Wewillimporttheserialport,pywapi,andtime(fordelay)modulesfortheproject:
#!/usr/bin/envpython
importserial
importglob
importpprint
importpywapi
fromtimeimportsleep
Wewilldetermineandestablishconnectiontotheserialport.Thescan()functionidentifiesalltheserialportsavailableontheRaspberryPi:
#Establishserialportcommunication
defscan():
returnglob.glob('/dev/ttyS*')+glob.glob('/dev/ttyUSB*')+
glob.glob('/dev/ttyACM*')
sport_data=scan()
fornameinscan():
serialport=serial.Serial(name,9600)
sleep(5)
serialport.write(bytes("A",'ascii'))
sleep(1)
response=serialport.read()
if(response==b'A'):
sport=name
serialport.close()
break
seport=serial.Serial(sport,9600,timeout=45)
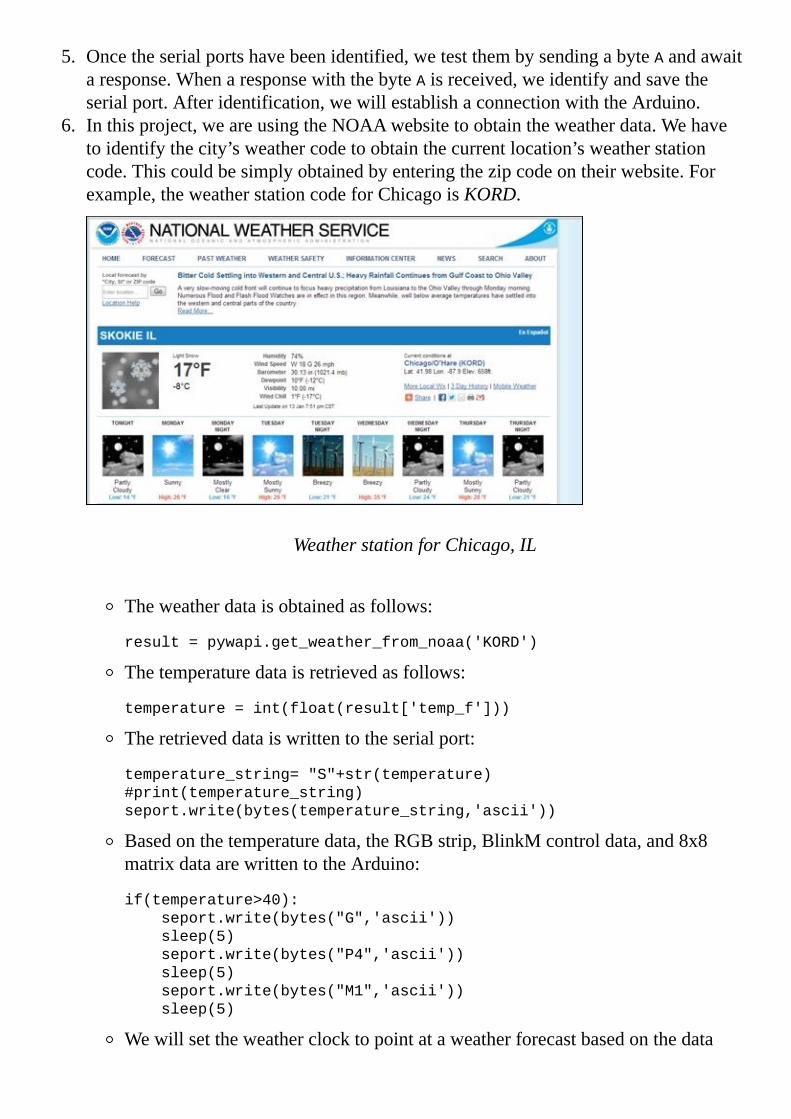
5. Oncetheserialportshavebeenidentified,wetestthembysendingabyteAandawaitaresponse.WhenaresponsewiththebyteAisreceived,weidentifyandsavetheserialport.Afteridentification,wewillestablishaconnectionwiththeArduino.
6. Inthisproject,weareusingtheNOAAwebsitetoobtaintheweatherdata.Wehavetoidentifythecity’sweathercodetoobtainthecurrentlocation’sweatherstationcode.Thiscouldbesimplyobtainedbyenteringthezipcodeontheirwebsite.Forexample,theweatherstationcodeforChicagoisKORD.
WeatherstationforChicago,IL
Theweatherdataisobtainedasfollows:
result=pywapi.get_weather_from_noaa('KORD')
Thetemperaturedataisretrievedasfollows:
temperature=int(float(result['temp_f']))
Theretrieveddataiswrittentotheserialport:
temperature_string="S"+str(temperature)
#print(temperature_string)
seport.write(bytes(temperature_string,'ascii'))
Basedonthetemperaturedata,theRGBstrip,BlinkMcontroldata,and8x8matrixdataarewrittentotheArduino:
if(temperature>40):
seport.write(bytes("G",'ascii'))
sleep(5)
seport.write(bytes("P4",'ascii'))
sleep(5)
seport.write(bytes("M1",'ascii'))
sleep(5)
Wewillsettheweatherclocktopointataweatherforecastbasedonthedata

obtained:
if(result['weather']=='LightSnow')or(result['weather']=='Snow')
or(result['weather']=='Flurries'):
seport.write(bytes("H",'ascii'))
sleep(5)
seport.write(bytes("T-2",'ascii'))
sleep(5)
7. Let’sreviewthecodeforthecontrolfromtheRaspberryPiandthecorrespondingacknowledgmentsignals.
ArduinoacknowledgementtocontrolsignalLetusreviewonthecontrolsignalandcontrolflowoftheweatherclock.
Controlflowfortheweatherclock
ThefollowingflowchartshowswhathappensintheArduinowhenacontrolcharacterisreceivedfromtheRaspberryPi.
Theweatherclockprogramflow
1. TheRaspberryPitriestoidentifytheArduinobysendingacharacterA.TheArduinorespondswithanacknowledgementcharacterA:
if(serial_read=='A'){
Serial.print("A");
}
2. ThisisafoolproofmechanismtoidentifyandestablishacommunicationwiththeweatherclockcontrollerfromtheRaspberryPi.
Temperaturedata
1. TheRaspberryPitemperaturedataissenttotheArduinowiththeletter/characterS.

Thereceiveddataisconvertedtoasignedintegerandpassedasanargumenttothe7-Segmentdisplaylibraries:
if(serial_read=='S'){
while(Serial.available()){
sb=Serial.read();
sevenseg_string[serInIndx]=sb;
serInIndx++;
temp=0;
}
temp=atoi(sevenseg_string);
memset(sevenseg_string,0,9);
}
2. WhenthecharacterSisreceived,wereadallthecharactersintothebuffersevenseg_string.Thestringisconvertedtoanintegerusingtheatoifunctionandstoredinthetempvariable.Thebufferisclearedattheendofthecycle.Thismethodtakessub-zerotemperaturesintoconsideration.
ControloftheRGBLEDstrip
1. TheindividualcolorsoftheRGBLEDarecontrolledindividuallyusingtheASCIIcharactersR,G,and,Brespectively.Eachcolorindicatesauniqueweathercondition,namely,blueindicatescoldweather,greenindicatesfairweatherconditions,andredcolorindicatesimpedingdangerinweatherconditions:
if(serial_read=='R'||serial_read=='G'||
serial_read=='B'){
color_bit=serial_read;
}
if(color_bit=='R'){
lightsequence_red();
}
elseif(color_bit=='G'){
lightsequence_green();
}
elseif(color_bit=='B'){
lightsequence_blue();
}
2. Whenthecharacterisreceived,thecorrespondinglightsequenceisturnedon.
Controlofstepperviaserialport
1. Earlier,wediscussedthecontrolofthesteppermotorusingapowerDarlingtondriverandthecontrolroutineforonefullrotation.Inthissection,wewilldiscusshowtocontrolthedirectionandthenumberofstepsbasedontheinputfromtheserialport.Inthisexample,theclockwisedirectionisindicatedby+,andcounterclockwisedirectionisindicatedby-.
Forexample,inordertomove45stepsinaclockwisedirection,thecommandwouldbe+45precededbytheletterP.Hence,itwouldbeP+45.Similarly,the

counterclockwisedirectioncommandwouldbeP-45:
if(serial_read=='P'){
while(Serial.available())
{
sb=Serial.read();
serInString[serInIndx]=sb;
serInIndx++;
}
}
2. WeawaittheserialcharacterPandstoretherestofthestringinabuffer.Oncethedataisstoredinthebuffer,wewilldeterminewhetherthefirstcharacteris+or-.
TheASCIInumberforthe+signis43and45forthe-sign.Wecomparethefirstcharacterinthebufferandexecutethecommandaccordingly.SerialcommunicationsusuallytransmitASCIInumbersandhencethenumbersareconvertedintotheirdecimalequivalents:
if(serInString[0]==43){
intvar_serial=0;
for(serOutIndx=1;serOutIndx<serInIndx;serOutIndx++)
{
var_serial=var_serial*10+(serInString[serOutIndx]-48);
}
motorSpeed=20;
for(inti=0;i<var_serial;i++){
clockwise();
}
Weconvertthereceivedserialdataintotheirdecimalequivalentatthisstep:
var_serial=var_serial*10+(serInString[serOutIndx]-48);
Onceconverted,wemovethestepperforthedesirednumberofstepsineitherdirectionusingtheclockwise()andcounterclockwise()functions.
3. Wewantthesteppermotortoreachthehomepositioneverytimebeforepointingtoaparticularweathercondition.Thissystemisanopenloopandsoitisnecessarytomovethearrowtothehomepositionbeforepointingtothecurrentweathercondition.
NoteThesteppermotormovesinacounterclockwisedirectiontopointatallweatherconditionsandaclockwisedirectiontomovetowardsthehomeposition.
4. Hence,whentheletterHistransmittedviatheserialport,thearrowismovedtowardsthehomeposition:
if(serial_read=='H'){
reset_stepper();
lightsequence();
}

Thereset_stepper()functiontakescareofsettingthearrowtothehomeposition:
voidreset_stepper(void){
uint8_tval;
//Getthevaluefromthesensor
if(ReadByte(sensorAddr,0x0,&val)==0)
{
//ThesecondLSBindicatesifsomethingwasnotdetected,
i.e.,
//LO=objectdetected,HI=nothingdetected
while(val&0x2)
{
motorSpeed=20;
Serial.println("Nothingdetected");
if(ReadByte(sensorAddr,0x0,&val)==0){
clockwise();//Wekeepgoingclockwiseuntilthearrowis
detected
}
}
}
else
{
Serial.println("Failedtoreadfromsensor");
}
}
Inthereset_stepper()function,wewillexecutethesteppermotor’sclockwiseroutineuntiltheobjectisdetected.ThesensorreferencemanualmentionsthatanobjectisdetectedifthesecondLSBissettolow.Hence,thestepperrotatesintheclockwisedirectionuntilalowsignalisdetected.
Programmingtheweatherforecastposition
1. Intheprevioussection,wediscussedthesteppermotorcontrolviatheserialport.Sinceweareusingasteppermotor,itispossibletopointateachweatherforecastconditionbasedonapredeterminednumberofstepsfromthestep.So,wewilldeterminethenumberofstepsrequiredtopointateachweatherforecastconditionandprogramthesepositionsintotheflashmemoryoftheArduino.
WeshouldusethePROGMEMkeywordtostorethepositiondataintheflashmemoryoftheArduinosincetheyareaconstant:
constintmydata[6][2]PROGMEM={
1,10,
2,18,
3,28,
4,43,
5,54,
6,66};
Thenumbers1through6inthearraycorrespondtotheweatherforecast

indicatorsstartinginthecounterclockwisedirection.Thesecondpositionindicatesthenumberofpositionsfromthehomepositiontopointtothatparticularweathercondition.ThecommandforindicatingweatherdataisprecededbytheletterT.Inordertopointtotheweatherforecast,Rain,thecommandwouldbeT-6.WhenacharacterTisreceived,westorethedatareceivedinabuffer.ItisconfirmedthatthesecondcharacterreceivedaftertheletterTisanumberbetween1and6.Wewillretrievethecorrespondingpositiondatafromtheflashmemoryusingthepgm_read_word_near()function.Oncethedataisretrieved,thesteppermotorcontrolroutineisexecutedforthedesirednumberofsteps.Nowwewillretrievethedatafromtheflashmemoryasfollows:
if(serial_read=='T'){
while(Serial.available())
{
sb=Serial.read();
serInString[serInIndx]=sb;
serInIndx++;
}
}
intvar_serial=serInString[1]-48;
serInIndx=0;
if(var_serial>0&&var_serial<=6)
{
steps=pgm_read_word_near(&mydata[(var_serial-1)][1]);
Serial.println(steps);
}
if(serInString[0]==45){
motorSpeed=20;
for(inti=0;i<steps;i++){
counterclockwise();
}
8x8matrixcontrol
WewillcontroltheLEDmatrixusingtheletterM.AsmileisdisplayedifM1isreceivedandafrownifM2isreceived:
if(serial_read=='M'){
sb=Serial.read();
if(sb-'0'==1){
set_display(smile_bmp);
}
elseif(sb-'0'==2){
set_display(frown_bmp);
}
}
BlinkMcontrol
TheBlinkMscriptisplayedwhenevertheletterPisreceived.TheletterPisfollowedbythescriptnumber.

if(serial_read=='P'){
while(Serial.available())
{
sb=Serial.read();
serInString[serInIndx]=sb;
serInIndx++;
}
BlinkM_playScript(BlinkM_addr,serInString[0]-48,0,0);
}

Objectivecomplete–minidebriefingInthissection,wediscussedtheoverallcontroloftheweatherclockanditsinterfacetotheInternet.Wealsodiscussedtheinterfacingofthesensorsanddisplayingtheweatherdata.

MissionaccomplishedInthisproject,wediscussedinterfacinganArduinowiththeRaspberryPi.Thiswasfollowedbyanexampleofconstructingaweatherclock.WedemonstratedtheArduinoasalow-levelcontrollerthatinterfacesactuators,sensors,anddisplaydeviceswhiletheRaspberryPiisinterfacedwiththeInternet.Ihopeyouenjoyedtheproject!


HotshotchallengeInthisexample,thecitylocationwashard-codedintothePythonscript.Itispossibletodisplaytheweatherdatabasedonthezipcode/citylocation.Whatcouldtheinputdevicebe?Howcanthisbeachieved?

Chapter4.ChristmasLightSequencerAsthenamesuggests,wewilldesignautomationandcontrolofChristmaslightsinourhomes.Wewilldecorateourhomeswithlightsforanyfestiveoccasionandworkonaprojectthatenablesustobuildfantasticprojects.Wewillbuildalocalservertocontrolthedevices.Wewillusetheweb.pyframeworktodesignthewebserver.We’dliketodedicatethischaptertothememoryofAaronSwartzwhowasthefounderoftheweb.pyframework.

MissionbriefingInthischapter,wewillinstallalocalwebserver-basedcontrolofGPIOpinsontheRaspberryPi.Wewillusethiswebserverframeworktocontrolitviaawebpage.
TheRaspberryPiontopofthetreeisjustanornamentfordecoration

Whyisitawesome?Wecelebratefestiveoccasionsbydecoratingourhomes.ThedecorationsreflectourheartanditcanbeenhancedbyusingRaspberryPi.
NoteThisprojectinvolvesinterfacingAC-powereddevicestoRaspberryPi.Youshouldexerciseextremecautionwhileinterfacingthedevices,anditisstronglyrecommendedthatyousticktotherecommendeddevices.

YourobjectivesInthischapter,wewillworkonthefollowingaspects:
InterfaceoftheChristmastreelightsandotherdecorativeequipmenttotheRaspberryPiSetupthedigitally-addressableRGBmatrixInterfaceofanaudiodeviceSettingupthewebserverInterfacingdevicestothewebserver

MissionchecklistThischapterisbasedonabroadconcept.Youarefreetochoosedecorativeitemsofyourowninterest.Wechosetoshowthefollowingitemsfordemonstration:
Item EstimatedCost
Christmastree*1 30USD
Outdoordecoration(optional) 30USD
SantaClausfigurine*1 20USD
Digitallyaddressablestrip*1 30USDapproximately
PowerSwitchTail2fromAdafruitIndustries(http://www.adafruit.com/product/268) 25USDapproximately
ArduinoUno(anyvariant) 20–30USDapproximately


InterfacethedevicestotheRaspberryPiNoteItisimportanttoexercisecautionwhileconnectingelectricalappliancestotheRaspberryPi.Ifyoudon’tknowwhatyouaredoing,pleaseskipthissection.Adultsupervisionisrequiredwhileconnectingappliances.
Inthistask,wewilllookintointerfacingdecorativeappliances(operatedwithanACpowersupply)suchastheChristmastree.ItisimportanttointerfaceACappliancestotheRaspberryPiinaccordancewithsafetypractices.ItispossibletoconnectACappliancestotheRaspberryPiusingsolidstaterelays.However,iftheprototypeboardsaren’tconnectedproperly,itisapotentialhazard.Hence,weusethePowerSwitchTailIIsoldbyAdafruitIndustries.
NoteThePowerSwitchTailIIhasbeenratedfor110V.
AccordingtothespecificationsprovidedontheAdafruitwebsite,PowerSwitchTail’srelaycanswitchupto15Aresistiveloads.Itcanbecontrolledbyprovidinga3-12VDCsignal.WewilllookintocontrollingthelightsonaChristmastreeinthistask.
PowerSwitchTailII–imagesource:Adafruit.com

PrepareforliftoffWehavetoconnectthePowerSwitchTailIItotheRaspberryPitotestit.ThefollowFritzingschematicshowstheconnectionoftheswitchtotheRaspberryPiusingPiCobbler.Pin25isconnectedtoin+,whilethein-pinisconnectedtotheGroundpinoftheRaspberryPi.
TheRaspberryPiconnectiontothePowerSwitchTailIIusingPiCobbler
ThePiCobblerbreakoutboardisconnectedtotheRaspberryPiasshowninthefollowingimage:

Engagethrusters1. Inordertotestthedevice,therearetwooptionstocontrolthedevicetheGPIOPins
oftheRaspberryPi.Thiscanbecontrolledeitherusingthequick2wireGPIOlibraryorusingtheRaspiGPIOlibrary.
NoteThemaindifferencebetweenthequick2wiregpiolibraryandtheRaspiGPIOlibraryisthattheformerdoesnotrequirethatthePythonscripttoberunwithrootuserprivileges(tothosewhoarenotfamiliarwithrootprivileges,thePythonscriptneedstoberunusingsudo).InthecaseoftheRaspiGPIOlibrary,itispossibletosettheownershipofthepinstoavoidexecutingthescriptasroot.Thisisleftassomehomeworkforyou.
2. Oncetheinstallationiscomplete,let’sturnon/offthelightsonthetreewithathreesecondinterval.Thecodeforitisgivenasfollows:
#Importtherpi.gpiomodule.
importRPi.GPIOasGPIO
#Importdelaymodule.
fromtimeimportsleep
#SettoBCMGPIO
GPIO.setmode(GPIO.BCM)
#BCMpin25istheoutput.
GPIO.setup(25,GPIO.OUT)
#InitialisePin25tolow(false)sothattheChristmastreelightsare
switchedoff.
GPIO.output(25,False)
while1:
GPIO.output(25,False)
sleep(3)
GPIO.output(25,True)
sleep(3)
Intheprecedingexample,wewillgetstartedbyimportingtheraspi.gpiomoduleandthetimemoduletointroduceadelaybetweenturningon/offthelights:
importRPi.GPIOasGPIO
#Importdelaymodule
fromtimeimportsleep
WeneedtosetthemodeinwhichtheGPIOpinsarebeingused.Therearetwomodes,namelytheboard’sGPIOmodeandtheBCMGPIOmode(moreinformationavailableonhttp://sourceforge.net/p/raspberry-gpio-python/wiki/).TheformerreferstothepinnumbersontheRaspberryPiboardwhilethelatterreferstothepinnumberfoundontheBroadcomchipset.Inthisexample,wewilladopttheBCMchipset’spindescription.Wewillsetthepin25tobeanoutputpinandsetittofalsesothattheChristmastreelightsareswitchedoffatthestartoftheprogram:

GPIO.setup(25,GPIO.OUT)
GPIO.output(25,False)
Intheprecedingroutine,weareswitchingoffthelightsandturningthembackonwithathree-secondinterval:
while1:
GPIO.output(25,True)
sleep(3)
GPIO.output(25,False)
sleep(3)
3. Whenthepin25issettohigh,thedeviceisturnedon,anditisturnedoffwhenthepinissettolowwithathree-secondinterval.
ConnectingmultipleappliancestotheRaspberryPiLet’sconsiderascenariowherewehavetocontrolmultipleappliancesusingtheRaspberryPi.
Itispossibletoconnectamaximumof15devicestotheGPIOinterfaceoftheRaspberryPi.(Thereare17GPIOpinsontheRaspberryPiModelB,buttwoofthosepins,namelyGPIO14and15,aresettobeUARTinthedefaultstate.Thiscanbechangedafterstartup.ItisalsopossibletoconnectaGPIOexpandertoconnectmoredevicestoRaspberryPi.)
Inthecaseofappliancesthatneedtobeconnectedtothe110VACmains,itisrecommendedthatyouusemultiplepowerswitchtailstoadheretosafetypractices.
Inthecaseofdecorativelightsthatoperateusingabattery(forexample,atwo-feetChristmastree)orappliancesthatoperateatlowvoltagelevelsof12VDC,asimpletransistorcircuitandarelaycanbeusedtoconnectthedevices.Asamplecircuitisshowninthefigurethatfollows:
Atransistorswitchingcircuit

Intheprecedingcircuit,sincetheGPIOpinsoperateat3.3Vlevels,wewillconnecttheGPIOpintothebaseoftheNPNtransistor.Thecollectorpinofthetransistorisconnectedtooneendoftherelay.
ThetransistoractsasaswitchandwhentheGPIOpinissettohigh,thecollectorisconnectedtotheemitter(whichinturnisconnectedtotheground)andhence,energizestherelay.
Relaysusuallyhavethreeterminals,namely,thecommonterminal,NormallyOpenTerminal,andNormallyClosedTerminal.Whentherelayisnotenergized,thecommonterminalisconnectedtotheNormallyClosedTerminal.Uponenergization,theNormallyOpenTerminalisconnectedtothecommonterminal,thusturningontheappliance.
Thefreewheelingdiodeacrosstherelayisusedtoprotectthecircuitfromanyreversecurrentfromtheswitchingoftherelays.
Thetransistorswitchingcircuitaidsinoperatinganappliancethatoperatesat12VDCusingtheRaspberryPi’sGPIOpins(theGPIOpinsoftheRaspberryPioperateat3.3Vlevels).TherelayandthetransistorswitchingcircuitenablescontrollinghighcurrentdevicesusingtheRaspberryPi.
Itispossibletouseanarrayofrelays(asshowninthefollowingimage)andcontrolanarrayofdecorativelightingarrangements.ItwouldbecooltocontrollightingarrangementsaccordingtothemusicthatisbeingplayedontheRaspberryPi(aprojectideafortheholidays!).
Therelayboard(again,showninthefollowingimage)operatesat5VDCandcomeswiththecircuitrydescribedearlierinthissection.Wecanmakeuseoftheboardbypoweringuptheboardusinga5VpowersupplyandconnectingtheGPIOpinstothepinshighlightedinred.Asexplainedearlier,therelaycanbeenergizedbysettingtheGPIOpintohigh.
Arelayboard

Objectivecomplete–minidebriefingInthissection,wediscussedcontrollingdecorativelightsandotherholidayappliancesbyrunningaPythonscriptontheRaspberryPi.Let’smoveontothenextsectiontosetupthedigitallyaddressableRGBLEDstrip!


SettingupthedigitallyaddressableRGBmatrixInthissection,wewilltalkaboutsettingupoptionsavailableforLEDlighting.WewilldiscusstwotypesofLEDstrips,namelyanalogRGBLEDstripsanddigitally-addressableRGBLEDstrips.
Aswediscussedthefirstoneindetailinthepreviouschapter,wewillskipitandmoveontothesecondkind.AsampleofthedigitallyaddressableRGBLEDstripisshownintheimagethatfollows:

PrepareforliftoffAsthenameexplains,digitally-addressableRGBLEDstripsarethosewherethecolourofeachRGBLEDcanbeindividuallycontrolled(inthecaseoftheanalogstrip,thecolourscannotbeindividuallycontrolled).
WherecanIbuythem?TherearedifferentmodelsofthedigitallyaddressableRGBLEDstripsbasedondifferentchipssuchasLPD6803,LPD8806,andWS2811.Thestripsaresoldinareelofamaximumlengthof5meters.SomesourcestobuytheLEDstripsincludeAdafruit(http://www.adafruit.com/product/306)andBanggood(http://www.banggood.com/5M-5050-RGB-Dream-Color-6803-IC-LED-Strip-Light-Waterproof-IP67-12V-DC-p-931386.html)andtheycostabout50USDforareel.Somevendors(includingAdafruit)selltheminstripsofonemeteraswell.

EngagethrustersLet’sreviewhowtocontrolandusethesedigitally-addressableRGBLEDstrips.
Howdoesitwork?MostdigitallyaddressableRGBstripscomewithterminalstopoweringtheLEDs,aclockpin,andadatapin.TheLEDsareseriallyconnectedtoeachotherandarecontrolledthroughtheSPI(SerialPeripheralInterface).
TheRGBLEDsonthestriparecontrolledbyachipthatlatchesdatafromthemicrocontroller/RaspberryPiontotheLEDswithreferencetotheclockcyclesreceivedontheclockpin.
InthecaseoftheLPD8806strip,eachchipcancontrolabout2LEDs.ItcancontroleachchanneloftheRGBLEDusingaseven-bitPWMchannel.MoreinformationonthefunctionoftheRGBLEDstripisavailableathttps://learn.adafruit.com/digital-led-strip.
ItispossibletobreaktheLEDstripintoindividualsegments.Eachsegmentcontainsabout2LEDs,andAdafruitindustrieshasprovidedanexcellenttutorialtoseparatetheindividualsegmentsoftheLEDstrip(https://learn.adafruit.com/digital-led-strip/advanced-separating-strips).
LightinguptheRGBLEDstripTherearetwowaysofconnectingtheRGBLEDstrip.TheycaneitherbeconnectedtoanArduinoandcontrolledbytheRaspberryPiorcontrolledbytheRaspberryPidirectly.
AnArduino-basedcontrol
NoteItisassumedthatyouarefamiliarwithprogrammingmicrocontrollers,especiallythoseontheArduinoplatform.
InProject3,TheArduinoRaspberryPiInterface,wediscussedconnectingananalogRGBstripusinganArduino.WeusedcontrolcommandstochangethecolorofthestripthroughtheserialportofArduino.Similarly,wecanconnecttheRGBstriptotheArduino.

AnArduinoconnectiontothedigitallyaddressableinterface
Intheprecedingfigure,theLEDstripispoweredbyanexternalpowersupply.(Thetinygreenadapterrepresentstheexternalpowersupply.TherecommendedpowersupplyfortheRGBLEDstripis5V/2ApermeterofLEDs(whilewritingthischapter,wegotanoldcomputerpowersupplytopoweruptheLEDs).TheClockpins(theCIpin)andtheDatapins(DI)ofthefirstsegmentoftheRGBstripareconnectedtothepinsD2andD3respectively.(WearedoingthissincewewilltesttheexamplefromAdafruitindustries.Theexampleisavailableathttps://github.com/adafruit/LPD8806/tree/master/examples.)
SincetheRGBstripconsistsofmultiplesegmentsthatareseriallyconnected,theClockOut(CO)andDataOut(DO)pinsofthefirstsegmentareconnectedtotheClockIn(CI)andDataIn(DI)pinsofthesecondsegmentandsoon.
Let’sreviewtheexample,strandtest.pde,totesttheRGBLEDstrip.TheexamplemakesuseofSoftwareSPI(BitBangingoftheclockanddatapinsforlightingeffects).ItisalsopossibletousetheSPIinterfaceoftheArduinoplatform.(Refertothisbook’swebsiteforanexample.)
Intheexample,weneedtosetthenumberofLEDsusedforthetest.Forexample,weneedtosetthenumberofLEDsonthestripto64foratwo-meterstrip.Hereishowtodothis:
1. Thefollowinglineneedstobechanged:
intnLEDs=64;
2. Oncethecodeisuploaded,theRGBmatrixshouldlightup,asshowninthisimage:
8x8RGBmatrixlitup
3. Let’squicklyreviewtheArduinosketchfromAdafruit.Wewillgetstartedbysetting

upanLPD8806objectasfollows:
//nLEDSrefertonumberofLEDsinthestrip.Thiscannotexceed160
LEDs/5mduetocurrentdraw.
LPD8806strip=LPD8806(nLEDs,dataPin,clockPin);
4. Inthesetup()sectionoftheArduinosketch,wewillinitializetheRGBstripasfollows:
//StartuptheLEDstrip
strip.begin();
//Updatethestrip,tostarttheyareall'off'
strip.show();
5. Assoonasweenterthemainloop,scriptssuchascolorChaseandrainbowareexecuted.
6. WecanmakeuseofthisArduinosketchtoimplementserialportcommandstocontrolthelightingscriptsusingtheRaspberryPi.
NoteThistaskmerelyprovidessomeideasofconnectingandlightinguptheRGBLEDstrip.YoushouldfamiliarizeyourselfwiththeworkingprinciplesoftheRGBLEDstrip.
ThereareseveralexamplesavailableforcontrollingtheLEDstripusingtheArduinoplatform.Afewareavailableonthewebsiteofthisbook.
NoteTheRaspberryPihasanSPIport,andhence,itispossibletocontroltheRGBstripdirectlyfromtheRaspberryPi.Refertothisbook’swebsiteforsomeexamples.

Objectivecomplete–minidebriefingInthissection,wereviewedoptionsfordecorativelightingandcontrollingthemusingtheRaspberryPiandArduino.


InterfaceofanaudiodeviceInthistask,wewillworkoninstallingMP3andWAVfileaudioplayertoolsontheRaspbianoperatingsystem.

PrepareforliftoffTheRaspberryPiisequippedwitha3.5mmaudiojackandthespeakerscanbeconnectedtothatoutput.Inordertogetstarted,weinstalltheALSAutilitiespackageandacommand-linemp3player:
sudoapt-getinstallalsa-utils
sudoapt-getinstallmpg321

EngagethrustersInordertousethealsa-utilsormpg321players,wehavetoactivatetheBCM2835’ssounddriversandthiscanbedoneusingthemodprobecommand:
sudomodprobesnd_bcm2835
Afteractivatingthedrivers,itispossibletoplaytheWAVfilesusingtheaplaycommand(aplayisacommand-lineplayeravailableaspartofthealsa-utilspackage):
aplaytestfile.wav
AnMP3filecanbeplayedusingthempg321command(acommand-lineMP3player):
mpg321testfile.mp3
NoteIntheprecedingexamples,thecommandswereexecutedinthedirectorywheretheWAVfileortheMP3filewaslocated.IntheLinuxenvironment,itispossibletostopplayingafilebypressingCTRL+C.

Objectivecomplete–minidebriefingWewereabletoinstallsoundutilitiesinthissection.Later,wewillusetheinstalledutilitiestoplayaudiofromawebpage.
ItispossibletoplaythesoundfilesontheRaspberryPiusingthemoduleavailableinPython.Someexamplesinclude:Snacksoundtoolkit,Pygame,andsoon.


InstallingthewebserverInthissection,wewillinstallalocalwebserveronRaspberryPi.TherearedifferentwebserverframeworksthatcanbeinstalledontheRaspberryPi.TheyincludeApachev2.0,Boost,theRESTframework,andsoon.

PrepareforliftoffAsmentionedearlier,wewillbuildawebserverbasedontheweb.pyframework.Thissectionisentirelyreferencedfromweb.pytutorials(http://webpy.github.io/).Inordertoinstallweb.py,aPythonmoduleinstallersuchaspiporeasy_installisrequired.Wewillinstallitusingthefollowingcommand:
sudoapt-getinstallpython-setuptools

EngagethrustersTheweb.pyframeworkcanbeinstalledusingtheeasy_installtool:
sudoeasy_installweb.py
Oncetheinstallationiscomplete,itistimetotestitwithaHelloWorld!example.
WewillopenanewfileusingatexteditoravailablewithPythonIDLEandgetstartedwithaHelloWorld!examplefortheweb.pyframeworkusingthefollowingsteps:
1. Thefirststepistoimporttheweb.pyframework:
importweb
2. Thenextstepisdefiningtheclassthatwillhandlethelandingpage.Inthiscase,itisindex:
urls=('/','index')
3. WeneedtodefinewhatneedstobedonewhenonetriestoaccesstheURL.WewillliketoreturntheHelloworld!text:
classindex:
defGET(self):
return"Helloworld!"
4. Thenextstepistoensurethatawebpageissetupusingtheweb.pyframeworkwhenthePythonscriptislaunched:
if__name__=='__main__':
app=web.application(urls,globals())
app.run()
5. Wheneverythingisputtogether,thefollowingcodeiswhatwe’llsee:
importweb
urls=('/','index')
classindex:
defGET(self):
return"Helloworld!"
if__name__=='__main__':
app=web.application(urls,globals())
app.run()
6. WeshouldbeabletostartthewebpagebyexecutingthePythonscript:
pythonhelloworld.py
WeshouldbeabletolaunchthewebsitefromtheIPaddressoftheRaspberryPi.Forexample,iftheIPaddressis10.0.0.10,thewebpagecanbeaccessedathttp://10.0.0.10:8080anditdisplaysthetextHelloworld.Yay!

AHelloworld!exampleusingtheweb.pyframework

Objectivecomplete–missiondebriefingWebuiltasimplewebpagetodisplaytheHelloworldtext.Inthenexttask,wewillbeinterfacingtheChristmastreeandotherdecorativeappliancestoourwebpagesothatwecancontrolitfromanywhereonthelocalnetwork.
ItispossibletochangethedefaultportnumberforthewebpageaccessbylaunchingthePythonscriptasfollows:
pythonhelloworld.py1234
Now,thewebpagecanbeaccessedathttp://<IP_Address_of_the_Pi>:1234.


InterfacingthewebserverInthissection,wewilllearntointerfaceonedecorativeapplianceandaspeaker.WewillcreateaformandbuttonsonanHTMLpagetocontrolthedevices.

PrepareforliftoffInthistask,wewillreviewthecode(availablealongwiththischapter)requiredtointerfacedecorativeappliancesandlightingarrangingtoawebpageandcontrolledoveralocalnetwork.Let’sgetstartedwithopeningthefileusingatexteditingtool(PythonIDLE’stexteditororanyothertexteditor).

Engagethrusters1. Wewillimportthefollowingmodulestogetstartedwiththeprogram:
importweb
fromwebimportform
importRPi.GPIOasGPIO
importos
2. TheGPIOmoduleisinitialized,theboardnumberingisset,andensurethatallappliancesareturnedoffbysettingtheGPIOpinstoloworfalseanddeclareanyglobalvariables:
#Setboard
GPIO.setmode(GPIO.BCM)
#Initializethepinsthathavetobecontrolled
GPIO.setup(25,GPIO.OUT)
GPIO.output(25,False)
3. Thisisfollowedbydefiningthetemplatelocation:
urls=('/','index')
render=web.template.render('templates')
4. Thebuttonsusedinthewebpagearealsodefined:
appliances_form=form.Form(
form.Button("appbtn",value="tree",class_="btntree"),
form.Button("appbtn",value="Santa",class_="btnSanta"),
form.Button("appbtn",value="audio",class_="btnaudio")
)
Inthisexample,threebuttonsareused,avalueisassignedtoeachbuttonalongwiththeirclass.Inthisexample,weareusingthreebuttonsandthenameisappbtn.Avalueisassignedtoeachbuttonthatdeterminesthedesiredactionwhenabuttonisclicked.Forexample,whenaChristmastreebuttonisclicked,thelightsneedtobeturnedon.Thisactioncanbeexecutedbasedonthevaluethatisreturnedduringthebuttonpress.
5. Thehomepageisdefinedintheindexclass.TheGETmethodisusedtorenderthewebpageandPOSTforbuttonclickactions.
classindex:
defGET(self):
form=appliances_form()
returnrender.index(form,"RaspberryPiChristmaslights
controller")
defPOST(self):
userData=web.input()
ifuserData.appbtn=="tree":
globalstate
state=notstate
elifuserData.appbtn=="Santa":
#dosomethinghereforanotherappliance

elifuserData.appbtn=="audio":
os.system("mpg321/home/pi/test.mp3")
GPIO.output(25,state)
raiseweb.seeother('/')
InthePOSTmethod,weneedtomonitorthebuttonclicksandperformanactionaccordingly.Forexample,whenthebuttonwiththetreevalueisreturned,wecanchangetheBooleanvalue,state.ThisinturnswitchesthestateoftheGPIOpin25.Earlier,weconnectedthepowertailswitchtopin25.
6. Theindexpagefilethatcontainstheformandbuttonsisasfollows:
$defwith(form,title)
<html>
<head>
<title>$title</title>
<linkrel="stylesheet"type="text/css"href="/static/styles.css">
</head>
<body>
<P><center><H1>ChristmasLightsController</H1></center>
<br/>
<br/>
<formclass="form"method="post">
$:form.render()
</form>
</body>
</html>
7. Thestylesofthebuttonsusedonthewebpagearedescribedasfollowsin‘styles.css‘:
form.btntree{
margin-left:200px;
margin-right:auto;
background:transparenturl("images/topic_button.png")no-repeattop
left;
width:186px;
height:240px;
padding:0px;
position:absolute;
}
form.btnSanta{
margin-left:600px;
margin-right:auto;
background:transparenturl("images/Santa-png.png")no-repeattop
left;
width:240px;
height:240px;
padding:40px;
position:absolute;
}
body{background-image:url('bg-snowflakes-3.gif');}
8. Thewebpagelookslikewhatisshowninthefollowingfigure:

Yay!WehaveaChristmaslightscontrollerinterface.

Objectivecomplete–minidebriefingWehavewrittenasimplewebpagethatinterfacesaChristmastreeandRGBtreeandplaysMP3files.Thisisagreatprojectforaholidayweekend.
ItispossibletoviewthiswebpagefromanywhereontheInternetandturntheseapplianceson/off(FansoftheTVshowBigBangTheorymightlikethisidea.Astep-by-stepinstructiononsettingitupisavailableathttp://www.everydaylinuxuser.com/2013/06/connecting-to-raspberry-pi-from-outside.html).


MissionaccomplishedInthisproject,wehaveaccomplishedthefollowing:
InterfacingtheRGBmatrixInterfacingACappliancestoRaspberryPiDesignofawebpageInterfacingdevicestothewebpage
WeusedexamplestodemonstratethecapabilitiesofenhancingthefestivedecorationusingtheRaspberryPi.Itisdefinitelypossibletoenhancethisprojectusingourcreativity.

ReferencesYoucanfindweb.pytutorialsathttp://webpy.github.io/docs/0.3/tutorial.
ThePythonPit–DriveyourRaspberryPiwithamobilephone,MagPiFebruary2013edition,page34,(http://www.themagpi.com/issue/issue-9/article/the-python-pit-drive-your-raspberry-pi-with-a-mobile-phone/)


Chapter5.InternetofThingsExample–AnE-mailAlertWaterFountainInthisproject,wewillworkonbuildingawaterfountainenabledbyRaspberryPi.Wewillalsodecoratethefountainwithlightingthatcanbecontrolledwiththehelpofawebinterface.Thisfountainwillenableustoreceiveemailalertsaswell.ItisagreatexampletoenabletheInternetofThingsusingtheRaspberryPi.

MissionbriefingWewilllearntobuildafountainandcontrolitusingaRaspberryPi.WewillbuildawebpagebasedontheFlaskframeworkandtrytocontrolthelightingarrangementonthefountain.Wewilldemonstratehowadecorativepiece,suchasatabletopfountain,canbeusedtoreceivee-mailortweetalerts.
FollowingisanimagethatshowsafountaincontrolledbytheRaspberryPi:

Whyisitawesome?Tabletopfountainsaresoothingineffectandplayagreatroleinrelievingstress.ItisfuntohaveaRaspberryPiplayagreatroleincontrollingourbehavior.Italsoenablesustoremindourselvestocheckoure-mails/Twitterfeedsonaregularbasis.

YourobjectivesInthisproject,wewillbuildthetabletopfountaininthefollowingsteps:
AssemblingthefountainInstallationoftheFlaskframeworkandinterfacingthefountainControllingRGBLEDsfromthewebpageSettingupe-mailalertsforthefountain

MissionchecklistAtabletopfountaincanbebuiltinseveralways,anditispossibletoincludealotofdecorativepiecestoenhancetheappeal.TheitemslistedinthefollowingtableincludeabasiclistofitemstodemonstrateafountaincontrolledbyaPi:
Item Cost(approximate)
ADIYfountainkit,includingcontainer,pebbles,andsoon(fromhomeimprovementcompaniessuchasHomeDepotoraDIYproductsuppliersuchasAmericanScienceandSurplus). 30USD
Asubmersiblepump(source:sameastheprecedingkit). 10USD
AdigitallyaddressableRGBLEDstrip(AdafruitorBanggood.LinktosourcesofLEDprovidedinthepreviousproject).
16.00/meterUSD
Awoodendowelrod(source:anyhobbystore). 2.00USD
Anacrylicsheet(source:anyhomeimprovementstore). 12.00USD
Mountingaccessories(scotchtapeandsoon). 10.00USD
Inthistask,wewillgetstartedwithassemblingthewaterfountainforourproject.Thefountainassemblyisasimplethree-stepprocess.Thereareseveralresourcesavailableonlinetobuildadesktopfountainusingrawmaterialsavailableathome(asomewhatsimpletutorialonbuildingatabletopfountainusingasubmersiblefromapetstore:http://www.instructables.com/id/Table-Fountain/).Wewilllookintoanexampleusinganoff-the-shelfDIYfountainkitinthisstep.

PrepareforliftoffIfthereaderisnotabletogainaccesstoaDIYfountainkit,thefollowingitemsarerequired:
Abasin(preferablyopaquesothatitdiffuseslight)Afountain/submersiblepumpfromapetshopPebblesandgravelDecorativeaccessoriesavailablefromaquariums
Theseitemscouldbepurchasedfromahobbyshoporanaquariumsuppliesstore.

Engagethrusters1. TheDIYtabletopfountainkitcomeswithabasinthathasaprovisiontorunthe
fountainpump’scableoutofthebasinthroughasealedoutlet.
Abasinwithasealedelectricaloutlet
2. Next,wewillplacethefountainpumpinsidethebasin.

Fountainpumptobeplacedinsidethebasin
3. Wewillnowcoverthepumpwithacoverandplaceadecorativepot.
Fountainpumpcoveredwithadecorativepot
4. Wecanfillthesidesofthepumpwithgravel,pebbles,smallpiecesofrock,andotherdecorativeaccessories.Wethenturnonthepumpandtestthewaterflowtomake

surethatwedon’tspillwaterandmakeamess.
Afountainwithdecorativeaccessories
5. We’llwrapthefountainwithadigitallyaddressableRGBLEDstripandwearedonewithassemblingthefountainwhenwepowerthefountainalongwiththeRGBLEDs.

AwaterfountainstrappedwithadigitallyaddressableRGBLED

Objectivecomplete–minidebriefingInthefirststep,wefinishedassemblingthefountainandtheRGBLEDstrip.Wewillmoveontoinstallawebframeworktoimplementlightingcontrolfortheframework,whichwecanchangebasedonourneeds.

InstallationoftheFlaskframeworkInthistask,wewillinstalltheFlaskframeworkontheRaspberryPiandcompleteatestwebpageontheRaspberryPi.WewillusetheFlaskframeworktocontroltheRGBLEDstrip.
PrepareforliftoffInthepreviousprojects,weinstalledpythonmoduleinstallerssuchaspiporeasy_install.Ifeitherofthesetoolsisn’tinstalled,theycanbeinstalledbyexecutingthefollowingcommand:
sudoapt-getinstallpython-pip
Alternatively,youcanusethefollowingcommand:
sudoapt-getinstallpython-setuptools.
Next,wewillworkoninstallingtheFlaskframeworkandthefirstexample.

Engagethrusters1. TheFlaskframeworkisinstalledusingthefollowingcommand:
sudoeasy_installflask
2. Oncetheinstallationiscomplete,wewilluseanexampleavailablefromtheFlaskframeworkdocumentation(http://flask.pocoo.org/docs/0.10/quickstart/#quickstart)andcreateaPythonscript(usingPythonIDLE’seditor):
fromflaskimportFlask
app=Flask(__name__)
@app.route("/")
defhello():
return"HelloWorld!"
if__name__=="__main__":
app.run()
3. WhenweexecutethesavedfileandexecutethePythonscript,thewebserverislaunchedlocallyontheRaspberryPi:
pythonhelloworld.py
*Runningon
http://127.0.0.1:5000/
4. ThewebserverisonlyvisibletotheRaspberryPiandawebpage(webaddress:http://127.0.0.1:5000)islaunchedontheRaspberryPi’sbrowser,whichwillshowthetextHelloWorld!.
AnHelloWorldexampleontheFlaskframework-basedwebserver
5. Inordertomakethewebservervisibletoalldevicesonthelocalnetwork,weneedtochangethefollowinglineinthePythonscript:
app.run('0.0.0.0')

Objectivecomplete–minidebriefingInthistask,wearedoneinstallingtheFlaskframeworkforcontrollingtheframework.Wewillmoveontothenexttasktosetupthings.


ControllingRGBLEDsfromawebpageInthistask,wewilllearnhowtocontroltheRGBLEDsfromawebpage.WewillusethedigitallycontrolledRGBLEDstripfromAdafruitIndustries.WewillinterfaceacolorpickerandsetthecoloroftheRGBstrip.Thecolorpickerwheelwasborrowedfromcircadianlightingproject,ChrisFane,distributedunderMITlicense.(https://github.com/rasathus/circadianLighting).Wewillmodifythiscodesampletosuitourneeds.We’llalsousetheLPD8806librarywrittenbyAdamHaile,distributedunderGPLv3license.(https://github.com/adammhaile/RPi-LPD8806.git).

PrepareforliftoffSinceweareusingthedigitallyaddressableRGBLEDstrip,weneedtoenabletheSPIdriversontheRaspberryPi.
NoteEnablingofSPIdriversisnotnecessaryiftheyouhaveinstalledOccidentalisinProject2,ARaspberryWebIDEExample.
Thefollowingfileneedstobemodified:/etc/modprobe.d/raspi-blacklist.conf.
Theblacklistspi-bcm2708lineneedstobecommentedout(adda#atthestartoftheline).Thenwegetthedriversworkingbyexecutingthefollowingcommand:
sudomodprobespi_bcm2708
TheSPIdevicescanbefoundlistedinthe/devdirectory:
SPIdeviceslistedinthedirectory

Engagethrusters1. TheRaspberryPineedstobeconnectedtotheSPIinterfaceoftheRaspberryPi.The
RGBLEDstriphastobepoweredbya5VDCadapter.TheclockpinCIneedstobeconnectedtotheclockpinoftheRaspberryPi(pin14,SCKpinoftheRaspberryPi).
TheclockpinCIneedstobeconnectedtotheclockpinoftheRaspberryPi(pin14oftheGPIOheader,SCKpinoftheRaspberryPi).ThedatapinDI(DataIn)needstobeconnectedtotheMOSIpin(pin12oftheGPIOheader)oftheRaspberryPi.TheGND(groundpin)oftheRGBLEDstripneedstobeconnectedtotheGND(groundpin)oftheGPIOheaderoftheRaspberryPi.
ConnectingtheRGBLEDStriptotheRaspberryPiusingaPiCobbler
2. Inordertocontrolthelightingarrangement,let’smakeuseoftheCircadianlightingproject’sPythonscriptandAdamHaile’sLPD8806library.WewillgetstartedbyimportingtheFlaskframeworkandtheLPD8806library.WewillinitializetheLPD8806librarybysettingthenumberofdigitallyaddressableRGBLEDsusedinthisproject:
num=64
led=LEDStrip(num)
Thecircadianlightingproject(http://rasathus.blogspot.com/2013/02/nasa-style-circadian-lighting-wrap-up.html)usesacolorpicker(basedonRaphael.js)andacolorissetonmouseclick.TheclicksonthecolorpickerwheelareconvertedintoRGBvaluesasfollows:
rgb_array=[0,0,0]
HEX='0123456789abcdef'
HEX2=dict((a+b,HEX.index(a)*16+HEX.index(b))forainHEXfor
binHEX)
defrgb(triplet):
triplet=triplet.lower()
rgb_array[0]=HEX2[triplet[0:2]]
rgb_array[1]=HEX2[triplet[2:4]]
rgb_array[2]=HEX2[triplet[4:6]]
return
(HEX2[triplet[0:2]],HEX2[triplet[2:4]],HEX2[triplet[4:6]])

deftriplet(rgb):
returnformat((rgb[0]<<16)|(rgb[1]<<8)|rgb[2],'06x')
Wheneveraclickisdetected,thepostedhexvaluesfromthewebserveraredetectedasfollows:
@app.route('/set/<hex_val>',methods=['GET','POST'])
defsend_command(hex_val):
rgb_val=rgb(hex_val)
3. TheRGBvaluesarepassedtoLPD8806viatheRaspberryPi’sSPIinterface:
led.fill(Color(rgb_val[0],rgb_val[1],rgb_val[2],0.98))
led.update()
4. Now,whenweexecutethescriptavailablealonginthewebserversamplefolder,weshouldbeabletolaunchawebserverthatwilldisplayacolourpickerasshowninthefollowingdiagram:
Aflaskframework-basedRGBinterface

Objectivecomplete–minidebriefingInthistask,wefinishedsettingupthewebserverthatcontrolsthefountain.Inthenexttask,wewillreviewsettingupe-mailalertsthroughcolourchangesonthefountain.
ItispossibletocontrolthelightsofthefountainbasedonasongbeingplayedontheRaspberryPi.Howcanthisbeachieved?Visitthisbook’swebsiteforsomeclues.


Setupofthee-mailalertsinthefountainInthistask,wewillreviewsettingupe-mailalertsfromGmailaccounts.WecanblinkanLED(asshowninthisstep)orflashtheRGBLEDstrip(thishastobeexecutedbythereader)whenane-mailofaspecificcategoryisreceived(forexample,worke-mail).

PrepareforliftoffWewillgetstartedbyinstallingthepython-feedparsertool.Googleprovidesaread-onlyinboxfeedandwewillmakeuseofthefeedparsermoduletodeterminewhetherwereceivedanynewe-mails.
sudoapt-getinstallpython-feedparser

Engagethrusters1. Inordertologinandparsethroughthee-mailfeed,wegetstartedbyimportingthe
feedparsermodule:
importsys
importfeedparser
2. Wewilldefinethevariables,includingtheGmailusernameandpassword(changedtogenericnamesbelow)alongwiththefunctionthatretrievesallunreade-mails.Refertothefollowingexample:
NoteInthisexample,wearejustretrievingthecountofanynewunreade-mails.Itispossibletoparseandidentifye-mailswithspecificlabels.Wewillleavethattothereader.Formoreinformation,refertohttps://developers.google.com/gmail/gmail_inbox_feed.
newEmail=""
username="[email protected]"
password="password"
proto="https://"
server="mail.google.com"
path="/gmail/feed/atom"
defmail():
email=
int(feedparser.parse(proto+username+":"+password+"@"+server+path)
["feed"]["fullcount"])
returnemail
TheprecedingfunctionhasbeenborrowedfromtheWonderHowTowebsite(http://null-byte.wonderhowto.com/how-to/make-gmail-notifier-python-0132845/).Let’ssavethisfunctioninaseparatefileandtrytocallitfromanotherfile.Forexample,thefunctionhasbeensavedinafilecalledparser.py.
3. Now,wewillimporttheparsermodulebyopeninganotherfileasamoduleandimplementthee-mailnotifier.Inthisfile,wewillblinkanLEDwhenthereisanewe-mail.WewillstartbyimportingtheparsermoduleandRPi.GPIO:
importparser
importtime
importRPi.GPIOasgpio
Wewillgetstartedbysettingtheoutputpinsforthee-mailnotifierexample:
gpio.setwarnings(False)
gpio.setmode(gpio.BCM)
gpio.setup(17,gpio.OUT)
Now,we’llcheckfornewe-mailsandblinkanLEDifthereisanunreade-mail:
whileTrue:

mail=parser.mail()#checkforemail
count=0
ifmail>0:#printfornewemails
print(mail)
print("newemails\n")
whilecount<10:
count+=1
gpio.output(17,gpio.HIGH)#blinkLEDiftherearenewemails
time.sleep(1)
gpio.output(17,gpio.LOW)
time.sleep(1)
gpio.output(17,gpio.LOW)#setLEDtolow
else:
time.sleep(10)#repeatcyclefor10seconds
TheLEDneedstobeconnectedasshowninthefollowingfigure:
ARaspberryPie-mailnotifier–SchematiccreatedwithFritzing,RaspberryPiLibrary.Courtesy:Adafruit
NoteInthistask,wejustmadeanLEDblinkwhenanewe-mailisreceived.Youshouldtryto

importtheLPD8806moduleandflashtheRGBLEDstrip.

Objectivecomplete–minidebriefingInthistask,wecompletedthesetupofthee-mailalertsaswellasauserinteractionelementofblinkinganLED.Thisbringsustotheendoftheassemblyandsetupofthefountain.


MissionaccomplishedInthisproject,weassembledafountain,awebserverframework,controlledtheRGBLEDs,andsetupe-mailalerts.Theyshouldlookprettyaccordingtotheuser’screativity.


HotshotchallengeInthisproject,wesetupe-mailalertswiththedisplay.IsitpossibletosetTwitteralerts?


Chapter6.RaspberryPiasaPersonalAssistantInthisproject,wewillbuildatoolusingRaspberryPithatactsasapersonalassistant.Thisprojectpresentsideastoovercomedifficultiesencounteredinourday-to-daylives(forexample,keepingtrackofdailyappointments,payingbillsontime),overcomeprocrastination,oreaseourroutinestressinducingactivitiesbyautomatingthem.

MissionbriefingInthisproject,webuildsomethingthathelpsinsimplifyingourday-to-dayactivities,easeourburdeninperformingmundanetasks,andremindusaboutimportantappointments/tasksaswellastrackingthem.Wewillworkonimplementingasolutionforeachpossiblescenario(forexample,wewillimplementasolutiontochecke-mailsandreviewasolutiontocreateanalertforanewe-mail).

Whyisitawesome?Wedoourbesttobesuccessfulinourcareerandleadahealthylifestyle.Whilewritingthisbook,wehadtocomeupwithaplantoovercomeourprocrastinationandtrackourtaskseffectively(especially,deliveringthedraftsofeachprojectontime!).
YourobjectivesInthisproject,wewillaccomplishthefollowing:
Settingupthee-mailfeedparserSettinguptheparserforremindersandeventsDesigninganenclosureforthepersonalassistantSettinguptheassemblyforthedishmonitorSettingupsensorsforthekeyalertsystem

MissionchecklistInthistask,wewillworkoninstallingalltoolsandPythonmodulesusedinthisproject:
1. Beforewestartinstallingthetoolsrequiredforthisproject,ifnecessary,youcanupdatetherepositoriesandpackagelistsasfollows:
sudoapt-getupdate
2. Wewillstartwithinstallingpython-feedparser.Weusedthepython-feedparsertoolinthepreviousprojectandcreatede-mailalertsforthewaterfountain.Ifyouskippedthepreviousproject,thetoolcanbeinstalledasfollows:
sudoapt-getinstallpython-feedparser
3. WewilluseGoogleCalendartoorganizeeventsandappointmentsasanexample.Weneedtoinstallthepython-gdatatooltomakeuseoftheGoogleAPIs:
sudoapt-getinstallpython-gdata
4. AnotherimportanttoolrequiredforthisprojectisOpenCV(http://opencv.org/).OpenCVisanopensourcecomputervisionframeworkdevelopedbyIntel.OpenCViswidelyusedbyresearchersandhobbyistsinapplicationssuchasobjectrecognition,machinevisionapplicationssuchascomponentinspectiononamanufacturingline,andmore.
NoteItisimportanttoknowthatittakesatleastfourhourstofinishthecompilationofOpenCV.
TheinstallationprocedureforOpenCVontheRaspberryPihasbeenborrowedfromhttp://mitchtech.net/raspberry-pi-opencv/andtheOpenCVinstallationguideforLinux(http://docs.opencv.org/doc/tutorials/introduction/linux_install/linux_install.html).Beforewegetstartedwiththeinstallationprocess,thedependenciesforOpenCVneedtobeinstalled.Thedependenciescanbeinstalledusingthefollowingshellscriptavailablealongwiththisproject:
shOpenCVInstall.sh
Oncethedependencieshavebeeninstalled,wecangetstartedwiththeOpenCVinstallation.ThesourcefilestoinstallOpenCVcanbedownloadedfromhttp://sourceforge.net/projects/opencvlibrary/files/opencv-unix/2.4.10/opencv-2.4.10.zip.Weneedtoextractthedownloadedsource:
unzipopencv-2.4.10.zip
ThenextstepisthemakefilegenerationusingCMake.ThelibraryhastobecompiledwithPythonsupportthatenablesapplicationdevelopmentusingaPythonscriptlibraryandsupport.

cdopencv-2.4.5
mkdirbuild
cdbuild
cmake-DCMAKE_BUILD_TYPE=RELEASE-D
CMAKE_INSTALL_PREFIX=/usr/local-DBUILD_NEW_PYTHON_SUPPORT=ON-D
BUILD_EXAMPLES=ON
Oncethemakefilehasbeengeneratedsuccessfully,OpenCVcanbebuiltandinstalledasfollows:
make
sudomakeinstall
Oncethelibraryhasbeeninstalled,weneedtotestwhethertheinstallationwassuccessfulbyexecutingoneofthePythonsamplesavailableinOpenCV:
cd~/opencv-2.4.5/samples/python
pythondelaunay.py
Iftheinstallationwassuccessful,weshouldabletolaunchtheDelaunaytriangulationsample.

Delaunaytriangulation–OpenCV
5. NowthatwehaveinstalledOpenCV,wewillproceedtobuildourprojectovertheforthcomingtasksoftheproject.


Settingupthee-mailfeedparserInthistask,wewilllearntosetupane-mailfeedparserandblinkanLED.Asanexample,wewillchecknewe-mailsinaGmailaccount.

PrepareforliftoffSincewealreadyinstalledthepython-feedparsermodule,wewillgetstartedwithsettingupthemailparser.Wewillbuildeachmoduleofourprojectasaseparateexample.

Engagethrusters1. UsingPythonIDLE,let’sgetstartedwithwritingapythonscripttoachievethistask.
Wewillgetstartedbyimportingthefeedparsermodule:
importsys
importfeedparser
2. Wewilldefinethefunctionrequiredtochecke-mails:
newEmail=""
username="[email protected]"
password="password"
proto="https://"
server="mail.google.com"
path="/gmail/feed/atom"
defmail():
email=
int(feedparser.parse(proto+username+":"+password+"@"+server+path)
["feed"]["fullcount"])
returnemail
NoteTheprecedingfunctionhasbeenborrowedfromtheWonderHowTowebsite(http://null-byte.wonderhowto.com/how-to/make-gmail-notifier-python-0132845/).
Let’ssavethisfunctioninaseparatefileandtrytocallitfromanotherfile.Forexample,thefunctionhasbeensavedinafilecalledparser.py.Wewillimportparser.pyinanotherfileasamoduleandimplementthee-mailnotifier.Inthisfile,wewillblinktheLEDwhenthereisanewe-mail.WewillstartbyimportingtheparsermoduleandRPi.GPIO:
importparser
importtime
importRPi.GPIOasgpio
Wewillgetstartedbysettingtheoutputpinsforthee-mailnotifierexample:
gpio.setwarnings(False)
gpio.setmode(gpio.BCM)
gpio.setup(17,gpio.OUT)
Wewillcheckfornewe-mailsandblinkanLEDifnecessary:
whileTrue:
mail=parser.mail()#checkforemail
count=0
ifmail>0:#printfornewemails
print(mail)
print("newemails\n")
whilecount<10:
count+=1
gpio.output(17,gpio.HIGH)#blinkLEDiftherearenewemails
time.sleep(1)

gpio.output(17,gpio.LOW)
time.sleep(1)
gpio.output(17,gpio.LOW)#setLEDtolow
else:
time.sleep(10)#repeatcyclefor10seconds
3. TheLEDneedstobeconnectedasshowninthefollowingdiagram:
RaspberryPiemailnotifier–SchematiccreatedwithFritzing,RaspberryPiLibrary


SettinguptheparserforremindersandeventsInthistask,wewillimplementamodulethatwillblinkanLEDtoremindusaboutimportanteventsandappointments.

PrepareforliftoffTheGoogleDataPythonclientlibraryisrequiredforthistask.Youalsohavetosavesometasksinyourcalendartotesttheimplementation.

Engagethrusters1. UsingthePythonIDLE’seditor,let’sgetstartedbycreatinganewfilecalled
calendars.py:
importgdata.calendar.service
importgdata.service
importgdata.calendar
importtime
2. WecangetstartedbydefiningaGoogleCalendarobject.WewilldefinetheusernameandpasswordforourGoogleaccount:
calendar_service=gdata.calendar.service.CalendarService()
calendar_service.email='[email protected]'
calendar_service.password='password'
calendar_service.ProgrammaticLogin()
3. Thecalendar_queryfunctionperformsaqueryforcalendareventsbydefiningatimeframeasfollows:
query=
gdata.calendar.service.CalendarEventQuery('default','private','full')
query.start_min='2014-01-01'
query.start_max='2013-05-31'
feed=calendar_service.CalendarQuery(query)
returnfeed
4. Let’screateanotherPythonscriptandtestthefunctionalityofthecalendarmodule(calendar.py).Wewillbeginbyimportingthepreviousdefinitionasamodule:
importcalendar
feed=calendar.calendar_query()
Now,wewillprintthedetailsoftheretrievedevents:
fori,an_eventinenumerate(feed.entry):
print'\t%s.%s'%(i,an_event.title.text,)
fora_wheninan_event.when:
print'\t\tStarttime:%s'%(a_when.start_time,)
print'\t\tEndtime:%s'%(a_when.end_time,)
TheprecedingexamplewasborrowedfromthedocumentationoftheGoogleCalendarAPI.Whenexecuted,theoutputwouldbesomethinglikethefollowing:
0.Sai
Starttime:2013-05-12T11:30:00.000-05:00
Endtime:2013-05-12T12:30:00.000-05:00
1.EventatFiregrillhouse
Starttime:2013-04-24T18:30:00.000-05:00
Endtime:2013-04-24T19:30:00.000-05:00
2.ChicagoHardwareStartupMeetup-FIRSTMEETING
Starttime:2013-01-23T18:30:00.000-06:00
Endtime:2013-01-23T21:00:00.000-06:00

3.FreescaleSABRELiteBoard
Starttime:2013-01-30T12:00:00.000-06:00
Endtime:2013-01-30T13:00:00.000-06:00
5. SinceweareabletoretrieveandparsetheeventsontheGoogleCalendar,wewilltrytoblinkanLEDtoremindusabouttheeventsandappointments.
WewillgetstartedwithimportingtheRPi.GPIOmoduleinthesamefile:
importcalendar_special
importtime
importdatetime
importRPi.GPIOasgpio
Sinceweusedpin17forthee-mailalerts,let’susepin24forremindersandevents.TheeventscanberetrievedfromGoogleCalendarasfollows:
feed=calendar_special.calendar_query()#retrieveeventsfrom
calendar
fori,an_eventinenumerate(feed.entry):
fora_wheninan_event.when:#Weretrievethestarttimeand
endtimeforeachappointment/event
try:
start_time=
datetime.datetime.strptime(a_when.start_time.split(".")[0],"%Y-%m-
%dT%H:%M:%S")
end_time=
datetime.datetime.strptime(a_when.end_time.split(".")[0],"%Y-%m-
%dT%H:%M:%S")
exceptValueError:
print(ValueError)
continue
current_time=datetime.datetime.now()
ifend_time>current_time:#Hastheeventended?
print'\t%s.%s'%(i,an_event.title.text,)
print'\t\tStarttime:%s'%(a_when.start_time,)
print'\t\tEndtime:%s'%(a_when.end_time,)
Wewillfilteroutallupcomingeventsandlistthemwithdetails.Wewillcheckwhetherwehavesetanalertfortheevent.Ifindeedtherewasanalert,wewillblinkanLEDuntiltheeventhasended:
forreminderina_when.reminder:
ifreminder.method=="alert"\
andstart_time-datetime.timedelta(0,60*int(reminder.minutes))
<current_time:
print'\t%s.%s'%(i,an_event.title.text,)
print'\t\tStarttime:%s'%(a_when.start_time,)
print'\t\tEndtime:%s'%(a_when.end_time,)
count=0
gpio.output(24,gpio.HIGH)
time.sleep(1)
gpio.output(24,gpio.LOW)
time.sleep(1)



DesigninganenclosuredesignforthepersonalassistantInthistask,wewilllookintotheenclosuredesignfortheproject.Inordertomakethingssimple,wewilluseadesignthatisopensource.Theenclosureisonethatcanbeassembledinfewsimplesteps.ThisenclosurewasdesignedbyMichaelMilazzo(http://makezine.com/2013/01/18/laser-cutting-a-glueless-acrylic-project-box/).

PrepareforliftoffThisenclosurecanbefabricatedinfewsimplestepsusingalasercutter.ThedesignavailablealongwiththisprojectinthePDFformatcanbemodifiedusingadesigntoolsuchasInkscapeorAdobeIllustrator.
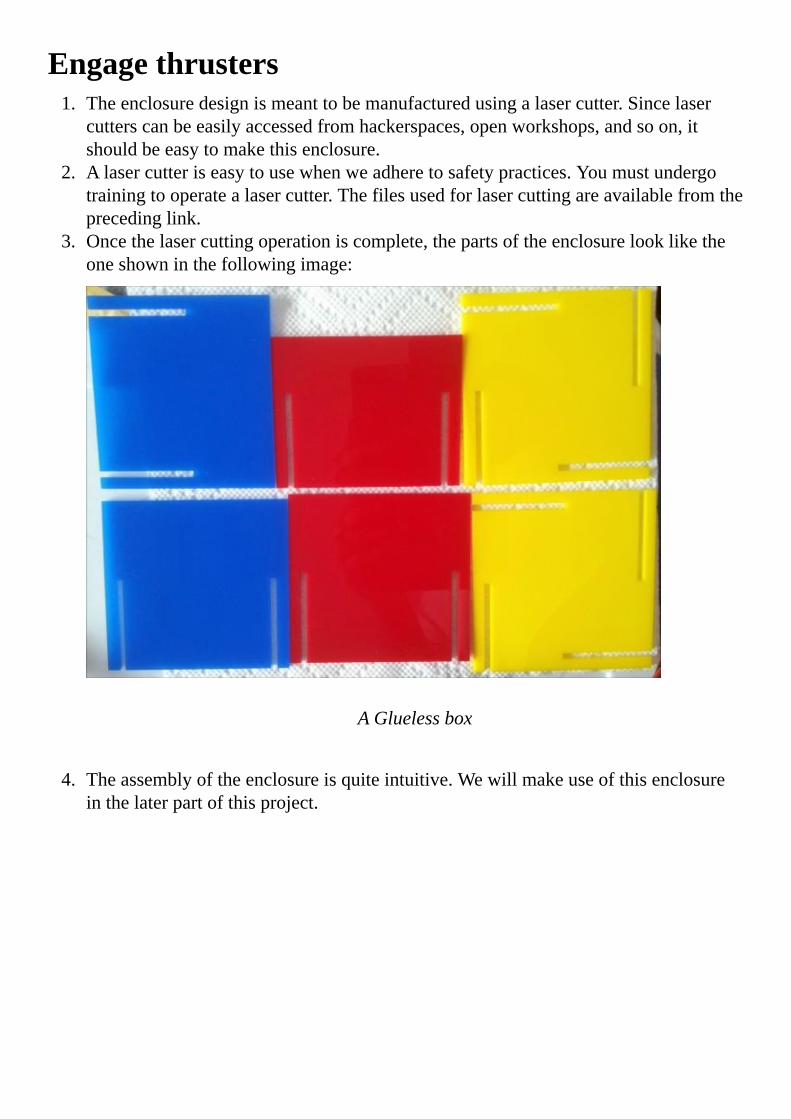
Engagethrusters1. Theenclosuredesignismeanttobemanufacturedusingalasercutter.Sincelaser
cutterscanbeeasilyaccessedfromhackerspaces,openworkshops,andsoon,itshouldbeeasytomakethisenclosure.
2. Alasercutteriseasytousewhenweadheretosafetypractices.Youmustundergotrainingtooperatealasercutter.Thefilesusedforlasercuttingareavailablefromtheprecedinglink.
3. Oncethelasercuttingoperationiscomplete,thepartsoftheenclosurelookliketheoneshowninthefollowingimage:
AGluelessbox
4. Theassemblyoftheenclosureisquiteintuitive.Wewillmakeuseofthisenclosureinthelaterpartofthisproject.

Anassembledenclosure


SettinguptheassemblyforthedishmonitorInthistask,wewillsetupamonitoroverthekitchensink.WewillcheckwhethertherearedishesinthesinkandsendLEDalertstotheuser.SincewehaveinstalledOpenCValready,wewillgetstartedwiththesetupofthemonitor.
ThistaskwasinspiredbyahackerbasedinLondonwhobuiltadishdetectortoalertusersofacommunalkitchen.
NoteThecodesampleforthisfunctionhasbeenborrowedfromtheOpenCVDishDetectorprojectbyTom:http://beagleboard.org/blog/2013-11-26-project-spotlight-dirty-dish-detector/

PrepareforliftoffWewillgetstartedbymountingacameraontopofthesinkandconnectingittoanoverheadcamera,asshowninthefollowingimage:
Anoverheadcameraontopofthesink

Engagethrusters1. WewillgetstartedbyimportingtheOpenCVmodule:
importtime
importsys
importcv2.cvascv
2. Wewillinitializethecameratocaptureframes:
capture=cv.CaptureFromCAM(0)
3. Afterinitialization,wewillgrabaframeforprocessing:
im=cv.QueryFrame(capture)
4. We’llconverttheimagetograyscaleforimageprocessingandfeaturedetection:
gray=cv.CreateImage(cv.GetSize(im),8,1)
edges=cv.CreateImage(cv.GetSize(im),cv.IPL_DEPTH_8U,1)
cv.CvtColor(im,gray,cv.CV_BGR2GRAY)
5. Wewillextractthefeaturesoftheimageusingthecannyedgedetectiontechnique.Sincetheinformationispronetonoise,weusethesmoothingtechniquetoeliminatethenoiseintheimage:
cv.Canny(gray,edges,200,100,3)
cv.Smooth(gray,gray,cv.CV_GAUSSIAN,3,3)
6. Wewillattempttodetectthedishesusingcommonshapesfoundinthedishes.ThetechniqueiscalledHoughtransformsandwewilltrytodetectcircularobjectsintheimage:
storage=cv.CreateMat(640,1,cv.CV_32FC3)
cv.HoughCircles(gray,storage,cv.CV_HOUGH_GRADIENT,1,30,100,55,0,0)
7. Wewilldrawacirclearoundeachobjectdetected.Thishelpsineliminatinganyincorrectobjectdetection:
foriinrange(storage.rows):
val=storage[i,0]
vessels=vessels+1#incrementdishesdetectedby1
radius=int(val[2])
center=(int(val[0]),int(val[1]))
cv.Circle(im,center,radius,(0,0,255),3,8,0)
8. Theobjectsdetectedcanbeviewedasfollows:

DishesdetectedinOpenCV
9. Ifavesselisdetected,wewilltriggeranLEDalerttoannoytheuser.

Objectivecomplete–minidebriefingWehavesetupadishmonitortoalerttheuserwhendishesaredetectedusinganLED.


SettingupsensorsforthekeyalertsystemInthistask,wewilltrytobuildamodulethattriestoalerttheuserifthethingsthatweusedaily(suchasthekeystoourapartmentdoororthecarkey)arenotfoundintherightplace.Ithelpsussavealotoftimefranticallysearchingformisplaceditems.Wewilluseareedswitchandamagnetforthismodule.
Theuniquenessaboutthistaskisthatwetrytoimproveourliveswithsimpleitemsthatareeasytopurchaseandsimpletobuild.Amagnetandareedswitchareavailablefromallhobbystores.Youcanalsouseareedswitchindoorsecuritysystems.ThefollowingisadiagramofareedswitchinterfacedtoaRaspberryPi:
ReedswitchsetupwiththeRaspberryPiGPIO

PrepareforliftoffWewillinterfacethereedswitchasshownintheprecedingdiagram.Let’stestitonabreadboardbeforesettingitupinanenclosure:
ReedswitchinterfacedtoRaspberryPi

Engagethrusters1. Wewillbetrackingwhetherthekeyisintherightplacebyattachingabarmagnetto
thekeys.WewillsetupaGPIOpinaswegetstarted:
importRPi.GPIOasGPIO
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(18,GPIO.IN)
2. Wewillreadtheinputsandifthemagnetinthekeyisnotnearbythereedswitch,weshouldbeabletotriggeranalert:
whileTrue:
if(GPIO.input(18)):
print("Keysareintherightplace")
else
print("Keysmissing!")
3. Nowthatwehavesetaninputforthereedswitch,weshouldbeabletosetupthereedswitchinsidetheenclosureasshowninthefollowingimage:
Areedswitchwiththemagnetattachedtothekey

Objectivecomplete–minidebriefingInthistask,youlearnedtouseasimplereedswitchtotheRaspberryPiandhelpimproveourlives.


MissionaccomplishedInthisprojectweimplementeddifferentmodules,includinge-mailalerts,calendaralerts,adishmonitor,andakeyalertsystem.Weleaveittotheusertointegrateallsubsystemsusingtheircreativity.You(likeus)havelearnedtouseRaspberryPitoimproveourqualityoflife.


HotshotchallengesHowcanweuseRaspberryPitoenhancethelivesofseniorcitizens?
Thedishdetectorisnoiseprone.Howcanitbeimproved?


References1. OpenCVinstallationontheRaspberryPiavailableathttp://mitchtech.net/raspberry-
pi-opencv/.2. OpenCVguideforinstallationonUbuntuavailableat
http://docs.opencv.org/doc/tutorials/introduction/linux_install/linux_install.html.3. PythonGmailnotifierfromtheWonderHowTowebsite,http://null-
byte.wonderhowto.com/how-to/make-gmail-notifier-python-0132845/.4. GoogledataclientAPIdocumentationforGoogleCalendar.5. GoogleCalendarusingpynotifybyJulienDanjou.6. OpenCVdishdetector,availableat,
http://www.adafruit.com/blog/2014/03/11/beaglebone-black-used-to-detect-dirty-dishes-beagleboneblack-txinstruments-beagleboardorg/,Tom,Londonhackerspace.


Chapter7.RaspberryPi-basedLineFollowingRobotInthisproject,wewillbuildalinefollowingrobotthatiscontrolledbyyourRaspberryPi.
NoteItisabsolutelynotnecessarytomakeuseoftheRaspberryPitobuildalinefollowingrobotunlessyouareusingacameratofollowtheline.WearebuildingthisrobottodemonstrateanexampleofbuildingamechatronicsystemusingtheRaspberryPi.

MissionbriefingInthisproject,wewillbuildalinefollowingrobotthatwillfollowablacklineagainstawhitebackground.Therobotwillmakeuseofapairofinfraredsensorstotracktheorientationoftherobotanddrivetherobotaccordingly.
Alinefollowingrobot

Whyisitawesome?ThePi,asyouhaveseeninthelastfewprojects,offersyouimmensefunctionalityandmanyadvantagesovermicrocontrollers.Youcanbringthispowerandsmallerfootprintstorobotics.So,wearegettingyoustartedoffwiththelinefollowingrobot.Onceyougetthisundercontrol,thepossibilitiesareendless,makingthisanawesomesegueintoroboticsandbeyond.

YourHotshotobjectivesInthisproject,wewillbuildthelinefollowingrobotinthefollowingsteps:
AssemblyofthePiPlateforthelinefollowingrobotSensorselection,interfacingsensors,anddatainterpretationImplementationoflinefollowinglogicbasedonsensordataTestingthemotordrivercircuitPreparationofthelinefollowingcourseDesigningthechassisforthelinefollowingrobotAstep-by-stepassemblyoftherobot

MissionchecklistThereareoff-the-shelfproductsavailabletobuildalinefollowingrobot,forexample,Make:itBasicRoboticsStarterKit(http://www.makershed.com/products/makeit-robotics-start-kit).Alternatively,inordertobuildalinefollowingrobot,thefollowingitemsarerequiredandthereadermayaddorremovecomponentstotherobotbasedonhis/hercreativity:
Item Cost
Alinefollowingsensorarray 10USD(intermsofcomponents)
DCmotorswithagearbox*2–60rpm(http://www.pololu.com/product/1594) 11USD
ArduinoUno(http://store.arduino.cc/product/A000066) 30USD
Plasticwheels–1pair(http://www.pololu.com/product/1425) 8USD
HBridgechip–forexample,L293D(http://www.pololu.com/product/24) 3USD
Anacrylicsheet(preferably12inchx24inchtocutthechassisusingalasercutter) 5USD
AUSBbatterypack(preferably10,000mAh,1Amaxoutput) 15USD
Aposterboard 3USD
PiPlatefromAdafruitIndustries(https://www.adafruit.com/product/801) 15USD


AssemblyofthePiPlateforthelinefollowingrobotNoteThePiPlateisnecessaryonlyifyouaregoingtobuildyourowncircuitry(insteadofanoff-the-shelfrobotkit)thatdrivestherobot.
WewillmakeuseofthePiPlatefromAdafruitIndustries.ThePiPlateisstackableandanadd-onhardwarefortheRaspberryPi.ThePiPlateislikeabreadboard/perforatedprototypingboardandenablesprototypingusingtheRaspberryPiplatform.Wewillassembletheheadersontheboard.

PrepareforliftoffThePiPlateisavailablefromAdafruitIndustries(www.adafruit.com).Itcosts15.95USD.Thisstackableadd-onhardwareisusefulbecausethesensorsandactuatorscanbeconnectedusingthescrew-interminals.ThiswillavoidanylooseconnectionstoyourRaspberryPiwhiletherobotisinmotion.

Engagethrusters1. ThecontentsofthePiPlatepackageareasfollows:
ContentsofaPiPlatepackage
NoteAdultsupervisionisrequiredforsolderingandputtingthePiPlatetogether.
2. ThePiPlaterequiressolderingoftheterminals,andAdafruithassometutorialsinsettingupthePiPlate.Whentheterminalsandheadersareassembledtogether,wehavewhatisshowninthefollowingimage:

APiPlatestackedontheRaspberryPi

Objectivecomplete–minidebriefingItisunlikelythattherewillbeaproblemwiththePiPlateunlessthereisacoldsolder.


Sensorselection,interface,anddatainterpretationInthistask,wewilldiscussthedifferentsensorsavailabletobuildalinefollowingrobotandpickasensorforthisproject.

EngagethrustersWewilldiscussthreesensorsinthistask,includinglightdetectingresistors,IRemitters/detectors,andacamera.Wewilldiscusstheiroperations,features,andtheirdistinctedgeoverothersensingtechniquesaswellastheirdisadvantages.
LightDependentResistorsAsthenamesuggests,LightDependentResistorsarethosethatchangetheirresistancewhenlightisincidentonthesurfaceoftheresistor.
LightDependentResistorsareusedincombinationwithabrightLED.Wecanmakeuseofthedifferenceinreflectivitybetweendifferentcolouredsurfacestofollowablacklineonadarksurface.
WhenLightDependentResistorisinsertedintoapotentialdividerconfiguration,asshowninthefollowingdiagram,thedropinvoltagecausesapotentialimbalanceleadingtoachangeinvoltage.Sincethereflectanceofwhiteandblackcolorsurfacesvaries,thechangeinvoltagecanbeusedtodistinguishbetweenblackandwhitecolors.ThispropertyofLightDependentResistorscanbeusedinourlinefollowingrobot:
ALightDependantResistorinapotentialdividerconfiguration
ThepotentiometerinthepotentialdividerconfigurationisusedtoadjustthesensitivityofLightDependentResistorsdependinguponthesurroundinglightingconditions.

LightDependentResistorscanbeusedasasensortobuildalinefollowingrobot,exceptinthosecaseswherethesensorresponsetimeisnottrivial.Hence,LDRscannotbeusedincaseswheretherobotisdesignedtomoveathigherspeeds.
LightDependentResistorshavetobecompletelyisolatedfromlightsourcesotherthanthebrightwhiteLED.ThisistomakesurethattheLEDrespondstoreflectedlightfromthebrightLED.
Infraredemitter/detectorAninfrared(IR)emitter/detectorcombinationisthebestalternativetotheLightDependentResistors.Inbothcases(theLDRandIRsensors),theemitter(ultrabrightwhiteLED/IRLED)andthedetector(LightDependentResistorsorphotodiode)arearrangednexttoeachother.
ThefollowingdiagramshowsthecircuitforanIRemitter/detector:
AnIRemitter/detectorforthelinefollowingrobot
Theprecedingfigureshowsaphotodiodethatisconnectedtotheinvertingterminalofanop-amp.Thepotentiometer(thatisconnectedtothenon-invertingterminaloftheop-amp)

canbeusedtovarythesensitivityofthesensor.
Whenlightfallsonthephotodiode,itpullsdownthe10Kresistor,andhence,theoutputoftheop-ampishigh.Thesignaldiode,1N4148,actsasasignallevelconverterbetween5Vand3.3V(RaspberryPi’sGPIOpinsare3.3Vtolerant).Whenthe5Vsideishigh,the3.3Vsideisalsohigh(thediodeisreversebiasedandhencethepullupresistorkeepsthe3.3Vsidehigh).Whentheinfraredsensorisontopoftheblacksurface,theoutputoftheop-ampislow(sincetheinvertingterminalishigh)andthepullupresistoronthe3.3Vsideispulleddown.Thus,theGPIOpinispulleddown.Theinfraredsensorshownintheprecedingdiagramcanonlybeusedincontrolledlightingconditionsastheyarepronetostrayinfraredradiationfromdaylight.
Inconditionswheretherobothastooperateunderbroaddaylightconditions,theinfraredtransmitterandreceiverhastobepulsewidthmodulatedsothatthesensorcandistinguishbetweennoiseandtheactualsignal(moreinformationcanbefoundathttp://www.ermicro.com/blog/?p=1908).
Machine-vision-basedlinefollowingrobotThefinalalternativetoasensortobuildalinefollowingrobotisacamera.TheRaspberryPifoundationhasreleaseditsowncameramoduleanditisalsosimpletointerface.
Alinefollowingrobotcanbeimplementedbygrabbingaframefromthecameramoduleandconvertingitintoagrayscaleimage.Thegrayscaleimagecanbeusedtodeterminethecurrentpositionoftherobotwithrespecttothelinethathastobefollowed.Sincewhiteandgreysurfaceshavevaryinglevelsofgreycolour,theorientationoftherobotcanbecorrectedusingadifferentialsteeringmechanism.
Acamerawouldbeoverkillforbuildingalinefollowingrobottojustfollowablacklineonawhitesurfaceinanindoorenvironment(also,abitoverwhelmingforabeginner).However,wecanuseitoutofanacademicinterest.
SensorselectionWehavediscussedthedifferentsensingoptionsavailableforbuildingalinefollowingrobot.Wewillchoosetheinfraredsensor.Wechosetheinfraredsensorforthefollowingreasons:
Itcanbeusedonlyincontrolledlightingconditions(sinceweareusinganunmodulatedinfraredlightsource)butservesasagoodstartforabeginnerItisreadilyavailableandeasytointerfaceIthasadistinctedgeoverlightdetectingresistorssinceithasabetterresponsetime

Objectivecomplete–missiondebriefingInthistask,wediscussedthedifferentsensoroptionsavailableforalinefollowingrobot.

ImplementationoflinefollowinglogicbasedonsensordataInthistask,wewillimplementasimplelinefollowingtechniqueusingtheinfraredsensor.Wewillmakeuseofapairofinfraredsensorstotrackablacklineonawhitesurface.Therobotwillmoveforwardifboththesensorsareonawhitesurface.Therobotturnsleftiftheleftsensorisontheblacklineandviceversa.

PrepareforliftoffThesensorneedstobesolderedandconnectedtotheRaspberryPi(somethingliketheoneshownintheprecedingschematic).Alternatively,youmayuseasensorofyourchoice.

Engagethrusters1. Asalways,wewillgetstartedbyimportingtherequiredmodules,especially
Rpi.GPIO:
importRPi.GPIOasGPIO
fromtimeimportsleep
2. Wewillsetthepinconfigurationthatwewilluseinthisprogram:
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(18,GPIO.IN)
GPIO.setup(25,GPIO.IN)
3. Thecontrollogicexplainedearlierisimplementedasfollows:
state=1
prev_state=0
whileTrue:
#bothsensorsareonwhitesurface
if((GPIO.input(18)==GPIO.HIGH)and(GPIO.input(25)==GPIO.HIGH)):
state=0
#leftsensoraloneisontheblacksurface
elif((GPIO.input(18)==GPIO.LOW)and(GPIO.input(25)==GPIO.HIGH)):
state=1
#rightsensoraloneisontheblacksurface
elif((GPIO.input(18)==GPIO.HIGH)and(GPIO.input(25)==GPIO.LOW)):
state=2
#ifsensorstatehaschangedsincelasttime,updatemotorcontrol
ifstate!=prev_state:
ifstate==0:
#moverobotforward
elifstate==1:
#turnrobotleft
elifstate==2:
#turnrobotright
prev_state=state
sleep(0.15)
Thesensorstatesarecheckedonceevery15milliseconds.Ifthereisachangeofsensorstates,themotorcontrolisupdated(asperthelogicexplainedinthistask).
4. Sinceweareusingonlytwosensors,therobotrunscrisscrossacrosstheline.Inordertoachievesmoothtrackingoftheline,asensorarrayisusedfordrivingthemotorsusingacontrolalgorithmsuchasaPIDcontrolalgorithm.

Objectivecomplete–minidebriefingInthistask,weimplementedthelinefollowinglogicforourrobot.Inthenexttask,wewilldiscussmotorcontroltodrivetherobotThiswouldbeeventuallyintegratedintothelinefollowinglogic.


TestingthemotordrivercircuitInthisproject,wewilluseapairofDCmotorstodrivetherobot.WewilluseadualH-bridge(SN754410)drivertocontroltheDCmotors.WewilluseasoftwarePWMlibrarywrittenfortheRaspberryPi.WechoseDCmotorsforthefollowingreasons:
1. DCmotorsareeasytooperateandcontrolusinganH-bridgeinterfacedtotheRaspberryPi.
2. ThereisasoftwarePWMlibrarythatmakesiteasiertocontroltheDCmotors.
Inthistask,wewillimplementtheDCmotorcontrolcircuitandalsowriteaprogramtocontroltheDCmotors.

PrepareforliftoffWewillusethesoftwarePWMfunctionavailablewithRPi.GPIO.ThesoftwarePWMfunctionisavailableonversionsgreaterthan0.5.3.WeneedtodeterminetheRPi.GPIOversioninstalledontheRaspberryPiusingacommand-lineterminal:
python
importRPi.GPIO
RPi.GPIO.VERSION
Ifthereturnedvalueisearlierthan0.53,thepackagecanbeupdatedasfollows:
sudoapt-getupdate
sudoapt-getupgrade
WewillbemakinguseofpulsewidthmodulationtodrivetheDCmotors.ItisimportantthatyoufamiliarizeyourselfwithpulsewidthmodulationtechniquestocontrolaDCmotor.WealsoneedtosetuptheDCmotorsfortestingbyconnectingthewheelstothemotor(somethingsimilartothefollowingfigure):
DCmotorswithsolderedwiresandwheelswithstrappedsiliconetires
Wealsoneedtoconstructthemotorcontrolcircuitryasshowninthefollowingschematic:

ASN754410motorcontrolcircuitry
AnH-bridgecircuitisusedforbidirectionalcontrolofaDCmotorusingamicrocontrollerorRaspberryPi(https://itp.nyu.edu/physcomp/labs/motors-and-transistors/dc-motor-control-using-an-h-bridge/).TheH-Bridgetakesin2inputsforeachmotor.ThefollowingtableshowsalogictablethatdictatesthecontrolofamotorusinganH-Bridge:
TheSN754410truthtable
Forexample,ifpin1Aissettohighwhile2Aissettolowandtheleadsofthemotorareconnectedto1Yand2Yrespectively,themotorrotatesinonedirection,whileitrotatesintheoppositedirectionwhen1Aissettolowand2Aissettohigh.

Engagethrusters1. WewillgetstartedwiththetestingoftheDCmotorswithasimplePythonprogram.
Wewillgetstartedbyimportingthemodules:
importRPi.GPIOasGPIO
importtime
2. Wewilldeclarethepinsthatwillbeusedasoutputpins.WewillconnecttheGPIOpins,8,9,10,and,11tomotordriverpins,1A,2A,3A,and4A,respectively:
GPIO.setwarning(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(8,GPIO.OUT)#connectedto1A
GPIO.setup(9,GPIO.OUT)#connectedto2A
GPIO.setup(10,GPIO.OUT)#connectedto3A
GPIO.setup(11,GPIO.OUT)#connectedto4A
3. Wetestboththemotorsbyrotatingtheminbothdirectionsfor10secondsandstoppingthem:
whileTrue:
#Rotatebothmotorsforwardfor10seconds
GPIO.output(8,GPIO.HIGH)
GPIO.output(9,GPIO.LOW)
GPIO.output(10,GPIO.HIGH)
GPIO.output(11,GPIO.LOW)
sleep(10)
#Stopmotorsandrotateinreversedirections
GPIO.output(8,GPIO.LOW)
GPIO.output(10,GPIO.LOW)
#Goreverse
GPIO.output(9,GPIO.HIGH)
GPIO.output(11,GPIO.HIGH)
sleep(10)
#Stopmotorsandrotatebothinoppositedirections
GPIO.output(9,GPIO.LOW)
GPIO.output(11,GPIO.LOW)
GPIO.output(8,GPIO.HIGH)
GPIO.output(9,GPIO.LOW)
GPIO.output(10,GPIO.LOW)
GPIO.output(11,GPIO.HIGH)
sleep(10)
#StopMotors
GPIO.output(8,GPIO.LOW)
GPIO.output(9,GPIO.LOW)
GPIO.output(10,GPIO.LOW)
GPIO.output(11,GPIO.LOW)
4. Intheprecedingexample,boththemotorswererunningat100percentdutycycle.Wewilllookintocontrollingthemotorsusingpulsewidthmodulation.Wewillset

thepinsasoutputanddeclaretheoperatingchannelfrequenciesforthePWMpins(1kHz):
GPIO.setup(8,GPIO.OUT)#connectedto1A
GPIO.setup(9,GPIO.OUT)#connectedto2A
GPIO.setup(10,GPIO.OUT)#connectedto3A
GPIO.setup(11,GPIO.OUT)#connectedto4A
GPIO.output(9,GPIO.HIGH)
GPIO.output(11,GPIO.HIGH)
motor1=GPIO.PWM(8,1000)
motor2=GPIO.PWM(10,1000)
5. Wewillstartthepulsewidthmodulationsignal(10percentdutycycle–runsat10percentoftheratedvoltage)asfollows:
motor1.start(10)
motor2.start(10)
Wecanvarythespeedofthemotorasfollows:
whileTrue:
motor1.ChangeDutyCycle(25)
motor2.ChangeDutyCycle(25)
sleep(15)
motor1.ChangeDutyCycle(50)
motor2.ChangeDutyCycle(50)
sleep(15)
motor1.ChangeDutyCycle(75)
motor2.ChangeDutyCycle(75)
sleep(15)
motor1.ChangeDutyCycle(100)
motor2.ChangeDutyCycle(100)
sleep(15)

Objectivecomplete–minidebriefingInthistask,weimplementedamotordrivercircuitryandtestedit.

PreparationofthelinefollowingcourseInthistask,wewillpreparethelinefollowingtrackfortherobot.

PrepareforliftoffTherearetwoapproachestobuildingalinefollowingtrack.Theyincludethefollowing:
1. PrintatrackavailablefromParallaxandsetitontopofaposterboard.2. UseelectricaltapeandbuildatrackusingatutorialfromPololu.
Thefollowingitemsarerequiredtocompletethistask:
1. Aposterboard2. Apermanentmarker3. Apencil4. Aruler5. A4sheets

Engagethrusters1. Wewilluseareadilyavailablelineforthefollowingtrack
(http://www.parallax.com/sites/default/files/downloads/28136-S2-PrintableTracks.pdf)designedfortheScribblerlinefollowingrobotfromParallax.ThelinefollowingtrackfromParallaxconsistsof10individualpiecesoftrackthatcanbearrangedandcustomizedaccordingtoourneeds.
2. Wewillgetstartedwithprintingtwosetsofthetrackavailablealongwiththisproject’sdownloadsandarrangethemaccordingtoourneedsanddeterminethecomplicityofthetrack.Anexampleofthetrackisshowninthefollowingimage,andthiscanbeconsideredthefastestwayofbuildingalinefollowingtrack:
Alinefollowingtrack
UseelectricaltapeandbuildatrackPololuhaspublishedanexcellenttutorial(https://www.pololu.com/docs/pdf/0J22/building_line_courses.pdf)onbuildingatrackusingelectricaltape.Theonlydisadvantagebehindusingthismethodtobuildatrackisthatthewrinklesontheelectricaltapecanaffectthesmoothoperationoftherobot.


DesigningthechassisforthelinefollowingrobotInthistask,wewilldesignthechassisforthelinefollowingrobot.Thereareseveraloptionsavailableintermsofdesigntoolsforthedesignofthechassis.WechoseAutodeskInventor,buttherearealotoftoolssuchasAutodesk123Dandsoon.

PrepareforliftoffThechassisfortherobotisfabricatedusingthelasercuttingtechnique.Youarewelcometofabricateyourownchassis.Wehavechosentouselasercuttingbecauseitistheeasiesttocomplete.Thetechniqueinvolvesdesigningthechassisfollowedbypreparingthedesignforfabricationandlasercutting.
Youmaydownloadthedesignfileavailablealongwiththisprojectanduseitforlasercutting.ThereisatrialversionofAutodeskInventoravailablefordownloadanditcanbeinstalledandusedfordesigningacustomchassis.
Asamaker/hacker,itisimportantthatyoulearnhowtousethesetoolsandhowtodesignachassis.
NoteTheuseoftoolssuchasalasercutterrequiressomebasictrainingandsupervision.Itisimportantthatyouundergotherequisitesafetytrainingbeforeoperatingsuchequipment.

Engagethrusters1. Wewillbeginbyconsideringthecomponentsthatgointotherobot.Thecomponents
includetheinfraredsensors,aballcaster,twoDCmotors,theRaspberryPi,thePiPlate,andthebattery.
2. SincethePiPlatewillbestackedontopoftheRaspberryPi,wewillmountthebatteryonaseparateplatemountedontopoftheRaspberryPi.Thecomponentpositionsaredesignedbasedonintuition.Thechassisisshowninthefollowingimage:
Lasercutchassisoflinefollowingrobot
3. Thetopplatethatholdsthebatterypackisshowninthefollowingimage:
Atopplateusedtomountthebatteryofthelinefollowingrobot

Objectivecomplete–minidebriefingWehavefinisheddesigningthepartsandfabricatingthemusingalasercutter.


Astep-by-stepassemblyoftherobotInthistask,wewillassembletherobotinsimplestepsthatareaccompaniedbyaphotographicalrepresentation.

PrepareforliftoffWeneedtohavethefollowingpartsreadytoassembletherobot:
1. Topandbottomchassisplatesforthelinefollowingrobot2. Infraredsensors3. Apairof#2screwsandnuts(washersoptional)4. AballcasterassemblywithscrewsfromPololu5. 2*M2.5screwsformountingtheRaspberryPi(washersoptional)6. 4*#61-inchscrewswithspacers(washersoptional)7. ARaspberryPi8. Velcro9. Battery10. 2DCmotors11. Double-sidedtape12. APiPlate13. Amotordriver

Engagethrusters1. Wewillgetstartedbymountingthecastorwheel.
Mountingthecastorwheel
2. WewillmounttheRaspberryPiusingM2.5screws.
RaspberryPimountedusingM2.5screws

3. ThisisfollowedbytheDCmotorscoupledwithwheelsusingthedouble-sidedtape.TheDCmotorswithaplasticgearboxfromPololudonotcomewithamountinghole,andhence,wewillusedouble-sidedtapetomountthemotors.Similarly,theinfraredsensorswerealsomountedusingdouble-sidedtapeatthecenterwithaspacingthatishalfthewidthofthetrack.
DCmotorsmountedusingdouble-sidedtape
4. WewillmountthePiPlateandthetopchassisplate.WewillusevelcrotomounttheUSBbatterypacktocompletethelinefollowingrobotassembly.

Anassembledrobot
5. Oncetheassemblyiscompleted,wehavetoconnectthemotorsandthesensorstogetstartedwiththetesting.

Objectivecomplete–minidebriefingWehavecompletedtheassemblyofthelinefollowingrobotinthistask.Oncethemotorcontrolcodeisimplementedintothelinefollowinglogic,weareallsettotestingtherobotonthetrack.Thismayrequiresometweakingthemotorspeedtomaketherobottrackthelineeffectively.


MissionaccomplishedInthisproject,webuiltalinefollowingrobotstepbystep.Wegotstartedwiththesensorsfollowedbymotorcontrol,chassisdesign,arenadesign,andintegration.Now,wehavealinefollowingrobot.
Alinefollowingrobotonthearena


HotshotchallengeInthisproject,wedidnotmakeuseofanymotorcontrolalgorithm(likePID)tosteertherobot.Howdoweimplementone?

ReferencesThePololututorialonBuildingLineFollowingandLineMazeCoursescanbefoundathttp://www.pololu.com/docs/0J22
TheAdvancedLineFollowingwith3pi:PIDControltutorialcanbefoundathttp://www.pololu.com/docs/0J21/7.c
TheParallaxlinefollowingtrack:http://www.parallax.com/Portals/0/Downloads/docs/prod/robo/scribbler2/Tracks.pdf

Chapter8.ConnectFourDesktopGameusingRaspberryPiInthisproject,wewillbuildadesktopgameenabledbytheRaspberryPi.Wewillbuildaprototypeusingacardboardbox,amonitor,andaninputcontrolonthecabinetandimplementoptionalspeakersandamarqueeforthegame.Thegamewillmakeuseofthepython-pygamemodule(agameengineavailableunderGPLlicense:http://pygame.org/wiki/about).

MissionbriefingAConnectFourgameisatwo-playergamewheretheobjectiveistoconnectfourcoinsofthesamecolorinavertical,horizontal,ordiagonalfashion(moreinformationisavailableathttp://en.wikipedia.org/wiki/Connect_Four).Wewillinstallthenecessarysoftwarepackagesandaddallthenecessaryaccessoriestomakeadesktopprototype.TheConnectFourgameinthisprojectisbasedonthebookMakingGameswithPython&Pygame(http://inventwithpython.com/makinggames.pdf).Thisdesktopgameisagreatstartforpeoplewhoaretryingtogettingstartedwithelectronicsasahobby.
Whenwefinishthisproject,ourcabinetwillbesomethingliketheoneshowninthefollowingimage:


Whyisitawesome?Ifyouarelikeusandhaveevervisitedthearcadeandwonderedhowmuchfunitwillbetobuildagameyourself,thisprojectisforyou.SingleboardcomputerssuchasRaspberryPiandsitessuchasInstructables(http://www.instructables.com/)onlymakethingseasier,andofcourse,isn’titfuntoconsideradaptingthedesignandleaveyourownstamponit?WewillfocusonthePiandhowtouseitforthegameandleavetherestuptowhatyoufindontheInternetandyourownimagination.
NoteInthisproject,wewillpresentthesubsystemsofwhatcouldpossiblygointobuildingaminidesktop/tabletoparcadesuchasagameusingRaspberryPi.Wewillnotconcentrateonpresentingabetteruserinterfaceforthegameoracabinet,butratherwhatittakestobuildsomethingsimilartoanarcadegame,includinggamelaunch,hardwareinterface,andsoon.

YourobjectivesWewillbuildourConnectFourdesktopgamethroughthefollowingactivities:
Installationofthepre-requisites(Missionchecklist)AhelloworldexamplewiththePython-pygameInputcontroldesignforthegameGettingstartedwiththeConnectFourgame(UI+soundeffects)AbriefdescriptionoftheConnectFourGameAIMarqueedesignandcontrolSettingupoftheswitchesusingacardboardbox

MissionchecklistOneofthemainprerequisitesforthisprojectistheinstallationofPython-pygame.Thetoolcanbeinstalledinasinglestepasfollows:
sudoapt-getinstallpython-pygame
Thisistheonlysoftwaretoolthatwewilluseinthisproject.Werequirethefollowingitemsfortheconstructionofthearcadecabinet.Wealsoneedthefollowingitemsfortheproject:
Item EstimatedCost
Acardboardbox
MomentaryPressbuttons–Arcadestyle*8(http://na.suzohapp.com/all_catalogs/pushbuttons/58-9111-L) 2.70USDeach
16*32LEDdisplayfromAdafruitorPi-LitedisplayfortheRaspberryPi(optional) USD40USD/31USD
Amonitorofthereader’schoicewithsignalcabletoconnecttoRaspberryPi 50USDapproximately
RaspberryPi 25USD/35USD
RGBLEDstrip(optional) 10USDapproximately


HelloworldexamplewiththepygameInthistask,wewilllearntheusageofpygameforgamedevelopment.Wewillgetstartedwithanexamplethatopensablankwindowandwriteacoupleoflinestomonitoreventssothatwecanquittheprogramifthewindowisclosed.
Wewillgothroughtheimportantfeaturesofthepygamemodule,whichisnecessarytobuildourarcadegame,includingplayingsoundsandcontrollingthemenu.

PrepareforliftoffAsmentionedearlier,thisprojectisbasedonthebookMakingGameswithPython&Pygame(http://inventwithpython.com/makinggames.pdf).Inthistask,wewillgothroughselectfeaturesofthepygamemodule.Itisimportantthatyoufamiliarizeyourselfwiththedifferentfeaturesavailableunderthepygamemodule.

Engagethrusters1. WewillgetstartedbyimportingthemodulesrequiredfortheHelloworldexample.
Wewillimportthepygameandthesysmodule:
importpygame,sys
2. Next,wewillalsoimportpygame.locals,sinceitcontainsseveralconstantvariables:
frompygame.localsimport*
3. Inordertomakeuseofthefunctionsofthepygamemodule,weneedtoinitializethemodule:
pygame.init()
4. Wewillsetthewindowwidthandheightparametersandcreateapygame.SurfaceobjectthatisstoredinavariablecalledDISPLAYSURF:
DISPLAYSURF=pygame.display.set_mode((400,300))
5. Wewillsetthewindowtitlename:
pygame.display.set_caption('HelloWorld!')
6. Now,wewillrunaloopthatwaitsforeventsinsidethewindowandupdatethedisplaythrougheverycycle.Inthisexample,wedonothaveanythingtobeupdated.Wewillquittheprogramwhentheuserclosesthewindow:
whileTrue:#maingameloop
foreventinpygame.event.get():
ifevent.type==QUIT:
pygame.quit()
sys.exit()
pygame.display.update()
7. ThisshouldopenupablankwindowtitledHelloWorld.
PlayingsoundsusingthepygamemoduleSincethesoundeffectsformthecruxofanarcadegame,weneedtoknowhowtoplaysoundsusingthepygameplatform.
1. Wewilldeclareasoundobjecttoplaythebeeps.wavfile,availablealongwiththedownloadsofthisfile.Thefileneedstobecopiedintothesamedirectoryasthepythonscriptthatrunsthegameasfollows:
soundObj=pygame.mixer.Sound('beeps.wav')
2. Thesoundcanbeplayedinaloopbycallingtheplay()methodasfollows:
whileTrue:#maingameloop
soundObj.play()

3. Wecanstopplayingthesoundfilebycallingthestop()method.
Buildingmenususingthepygamemodule1. Wewillneedasimplemenuforourdesktopgame.Wewillmakeuseofthemenuclass(distributedunderGNUGPLv3license)writtenbyScottBarlow.Let’sreviewthesimple_example.pyexample.(http://www.pygame.org/project-MenuClass-1260-.html.)
2. Inthismenuexample,amenuobjectiscreated;whenamenuoptionisselectedusingakeyboard,theselectedoptionishighlightedandprintedonaterminalwhenthereturnkeyispressed.Forexample,whenthedownkeyispressedtoselectLoadGameandthereturnkeypressed,theLoadGameoptionisprintedtotheterminal.
3. Let’sdiscusstheparametersthatneedtobepassedasargumentstocreateamenuobject.Accordingtothedocumentationavailablewiththemenuclass,amenuobjecthastobedefinedwiththefollowingparameters:
menu=cMenu(x,y,h_pad,v_pad,orientation,number,
background,buttonList)
TheparametersxandyrefertothelocationoftheoriginofthemenuobjectonthegamescreenTheparametersh_padandv_padrefertothespacingbetweenthebuttonsinthehorizontalandverticaldirectionsTheorientationparameterreferstothearrangementofthebuttonsonthescreen,thatis,'horizontal'or'vertical'Thenumberparameterreferstothenumberofbuttonsthatcanbeaccommodatedinasinglerow(whenarrangedhorizontally)orinasinglecolumn(whenarrangedvertically)ThebackgroundparameterreferstothesurfaceonwhichthemenuhastobecreatedThebuttonListparameterreferstothelistofbuttonsthatwewantonthescreen
4. Wewillgetstartedbydeclaringamenuobjectandlistingalltheoptionswewantinthemenu,namely:
menu=cMenu(50,50,20,5,'vertical',100,screen,
[('StartGame',1,None),
('ScoreBoard',2,None),
('Exit',3,None)])
5. Themenuneedstobecenteredonthesurfaceofthescreen:
menu.set_center(True,True)
6. Thetextofthemenubuttonsalsoneedstobealigned:
menu.set_alignment('center','center')
7. Inordertodisplayandupdatethemenuandselectionparameters,asimplestate

machineisused:
state=0
prev_state=1
8. Thepygame.event.wait()methoddetectsanykeyboardormouseeventsandupdatesthecurrentstateaccordingly.
9. Themenuisupdatedbythemethod(duetoakeypressevent/returnkeypress):
pygame.event.post(pygame.event.Event(EVENT_CHANGE_STATE,key=0))
10. Whenthereturnkeyispressedtoselectanoption,theselectedoptionisprintedtotheterminalandthemenuisupdatedbyhighlightingtheselectedoption(inred)byrect_list,state=menu.update(e,state):
whileTrue:
ifprev_state!=state:
pygame.event.post(pygame.event.Event(EVENT_CHANGE_STATE,key=0))
prev_state=state
e=pygame.event.wait()
ife.type==pygame.KEYDOWNore.type==EVENT_CHANGE_STATE:
ifstate==0:
rect_list,state=menu.update(e,state)
elifstate==1:
print'StartGame!'
state=0
elifstate==2:
print'LoadGame!'
state=0
elifstate==3:
print'Options!'
state=0
else: print'Exit!'
pygame.quit()
sys.exit()
#Quitiftheuserpressestheexitbutton
ife.type==pygame.QUIT:
pygame.quit()
sys.exit()
#Updatethescreen
pygame.display.update()

Objectivecomplete–minidebriefingWehavefinishedtestingthepygamemoduleandreviewedasimplemenudesignexamplealongwithtestingtheplayingofsoundsusingthepygamemodule.


GettingstartedwiththeConnectFourgame(UIandsoundeffects)Inthistask,wewillworkonsomepreliminarytweaksfortheConnectFourgame.WewilltaketheexamplefromNewGameSourceCode:FourinaRow,http://inventwithpython.com/blog/2011/06/10/new-game-source-code-four-in-a-row/,andmakeuseoftheexamplesdiscussedintheprevioustask,namely,playingsoundsandmenudesignandaddthemtotheConnectFourGamePythonscript.

PrepareforliftoffWeneedtheConnectFourgameexample(fourinarowexample—fourinarow.py)fromthebook.Theexamplecanbedownloadedfromhttp://invpy.com/fourinarowimages.zip.

EngageThrusters1. Inthisproject,thegameneedstobelaunchedfullscreenassoonasRaspberryPi(that
hasbeensetuptolaunchthedesktopgame)ispoweredup.2. Thepygame.display.set_modemethodisusedtosetthegametofullscreenwiththe
pygame.FULLSCREENargument.Theresolutionofthegamewillbe(WindowwidthxWindowheight),inthiscase,640x480pixels:
DISPLAYSURF=pygame.display.set_mode((WINDOWWIDTH,
WINDOWHEIGHT),pygame.FULLSCREEN)
3. Inordertolaunchthegame(thePythonscript:Connect_four.py)afterRaspberryPiispoweredup,let’screateashellscriptusingatexteditorwiththefollowingcontentsandcallitstartup.sh:
#!/bin/sh
pythonConnect_four.py
4. Theshellscriptneedstobesavedtothe/home/pilocation.Alternatively,thescriptcanbesavedatanyotherlocation.
5. Theshellscripthastobemadeanexecutablefileusingthechmodcommand:
sudochmod755startup.sh
6. Inordertoexecutestartup.shuponboot,the/etc/rc.localfileneedstobemodified.Inthecommand-lineterminalofRaspberryPi,thefilecanbeopenedusingatexteditorsuchasnano:
sudonano/etc/rc.local
7. Beforethelastlineofthefile,exit0,thefollowinglineshavetobeadded:
sleep10
cd/home/pi/
/home/pi/startup.sh&
exit0
8. Thescriptisexecutedafterallthekernelmodulesareinitialized.Thescriptisexecutedfromthedirectorywherethefileshavebeensaved.
AddingamenuforthegameThenextstepistoaddamenuforthegame.Asdiscussedintheprevioustask,wewillmakeofthemenuclassavailableathttp://www.pygame.org/project-MenuClass-1260-.html
1. ThefirststepistoimportthemenuclassintotheConnectFourgame’sPythonscript:
frommenuimport*
2. Let’screateamenuobjectwiththeStartGameoptionstolaunchthegameandExittoquitthegame.Wewillintegratethemenufromthefirsttaskofthisproject.We

willgetstartedbyaddingthemenuthatneedstobedrawnonthesurface:
menu=cMenu(50,50,20,5,'vertical',100,DISPLAYSURF,
[('StartGame',1,None),
('Exit',2,None)])
3. Let’ssetthebackgroundofthemenutoabluecolor:
DISPLAYSURF.fill(BGCOLOR)
4. Usingthemenudesigndiscussedintheprevioustask,let’saddalinetolaunchthegamewhentheStartGameoptionisselected.ThegameislaunchedbycallingtherunGame(isFirstGame)method:
ifstate==0:
rect_list,state=menu.update(e,state)
elifstate==1:
runGame(isFirstGame)
isFirstGame=False
state=0
elifstate==2:
print'Exit'
pygame.quit()
sys.exit()
pygame.display.update()
AddingsoundstothegameWhilethegameisinprogress,thesoundscanbeplayedusingpygame.mixer.Refertothefollowingstepstofindouthowtodothis:
1. Let’sgetstartedbyimportingpygame.mixer:
importpygame.mixer
2. Thisisfollowedbyinitializingpygame.mixer:
pygame.mixer.init()
3. Thesoundsthatwillbeplayedwhenthegameislaunchedorwhilethegameisinprogresshavetobeloaded:
menu_sound=pygame.mixer.Sound('8-bit-circus-music.wav')
moves_sound=pygame.mixer.Sound('ding.wav')
4. WechosetousesoundsfromFreeSounds(https://www.freesound.org).ThesoundsareavailableunderCreativeCommonsLicense.
TipDinghitscanbefoundathttps://www.freesound.org/people/adcbicycle/sounds/13952/and8BitCircusMusiccanbefoundathttps://www.freesound.org/people/bone666138/sounds/198896/.
5. Inthemainmenu,let’splaythe8-bit-circus-musicfileinaninfiniteloop(until

theuserlaunchesagameorexitsthemenu).
menu_sound.play(-1)
6. Theparameter-1indicatesthatthefilesneedtobefiledinaloop.7. Inordertostopplayingthesound,thestop()methodhastobecalledbefore
launchingthegame:
menu_sound.stop()#stopplayingthesound
runGame(isFirstGame)
8. Thesoundfileisplayedinalooponceagainafterthegameisover.9. Similarly,thedingsoundisplayedwheneverthegameAI(calledthecomputerinthe
game)ortheplayerhasplayedaturn:
moves_sound.play()#Playdingsound

Objectivecomplete–missiondebriefingWehavecompletedthebasictweaksrequiredforthegame.Inthenextstep,wewillinterfacethearcadestylebuttonstothegame.


InterfacinggameinputsusingthePiFacemoduleInthistask,wewillreviewinterfacingthearcadestylebuttons(showninthefollowingimage)toRaspberryPitoplaythegame.Inthistask,wewilljustdiscussthesoftwarepartofthecode.
Momentaryarcadepushbuttonswitch(http://na.suzohapp.com/all_catalogs/pushbuttons/58-9111-L)
WewillmakeuseofthePiFaceinterfaceboardavailableathttp://www.piface.org.uk/products/piface_digital/tointerfacethesebuttonstoRaspberryPi.Theboardisastackableadd-onhardwarethatcanbeusedtointerfaceeightinputsandeightoutputs.ThePiFacecomeswithfourtactileswitchesandwecangetstartedwithtestingtheinputs.
ThemainreasonbehindusingthePiFaceisthatweneedtomonitortheswitchstatestodeterminethereisakeypress.ThePiFacecomeswithanI/OexpansionoptionandcanbeaccessedthroughtheSPIinterface.Thesefeaturesenablesimplecontrolofthegameinputs.

Prepareforliftoff1. RaspberryPi’sSerialPeripheralInterface(SPI)driversneedtoenabledbyeditingthe
/etc/modprobe.d/raspi-blacklist.conffileusingatexteditorsuchasnano:
sudonano/etc/modprobe.d/raspi-blacklist.conf
Thedriverscanbeenabledbyinsertingan#beforethefollowingline:
#blacklistspi-bcm2708
TheSPIdriversneedtobeloadedusingthemodprobecommand:
sudomodprobespi-bcm2708
Thedrivers/toolsrequiredtointerfacewiththePiFacemodulecanbeinstalledasfollows:
wgethttp://pi.cs.man.ac
.uk/download/old_install.txt
NoteTheinstallationpackagesforthePiFacemoduleareavailableasDebianpackages.Refertotheinstallationguidefromhttp://www.piface.org.uk/guides/.IfyouinstalltheDebianpackages,thePythonmoduleimportsandthemethodsusedtoreadtheinputsmightalsovaryaccordingly.
2. Let’srenamethefileandexecuteit:
mvinstall.txtinstall.sh
chmod+xinstall.sh
./install.sh
3. Oncetherequiredtoolsareinstalled,RaspberryPihastoberestartedusingthefollowingcommand:
sudoreboot
4. OnceRaspberryPihasrestarted,theemulatorthatcomesalongwiththetoolcanbetested.TheemulatorenablesyoutotestallinputsandoutputsofthePiFaceinterface.Theemulatorcanbelaunchedfromthecommand-lineterminalasfollows:
Piface/scripts/piface-emulator
5. Theemulatorinterfacewouldbesomethingliketheoneshowninthefollowingscreenshot:


Engagethrusters1. Let’stestthebuttonsavailableonthePiFacemoduleusingaPythonscript:
importpiface.pfioaspfio
2. Thepiface.pfiomoduleneedstobeimportedandinitialized:
pfio.init()
3. Theread_input()methodreturnsan8-bitnumberthatrepresentstheinputstatesofalltheeightbuttons:
whileTrue:
print(pfio.read_input())
4. Eachbitofthe8-bitnumbercorrespondstoadigitalinputonthePiFacemodule.Thefollowingtableshowstheswitchpositionsthatarerepresentedbybitpositions:
S7 S6 S5 S4 S3 S2 S1 S0
Switchpositionsrepresentedbybitpositions
5. Whenaswitchispressed,aparticularbitissetandthisbitcanbeusedtointerpretthecolumnpositionoftheConnectFourgame.
6. Forexample,whenS0ispressed,thebit0issetandhencethe8-bitwordvalueis1.WhenS1ispressed,thebit1issetandthe8-bitwordvalueis2andsoon.
7. WeignorescenarioswhentwoswitchesarepressedatthesametimeastheConnectFourgameinvolvesplayingonlyonecolumnatatime.
8. TheConnectFourgamewasdesignedtobeplayedusingamouse.Let’sperformsometweakstoplayitusingbuttons.Let’sgetstartedbycommentingoutthegetHumanMove()function.
9. Whenthegameisplayedusingamouse,thecoinisactuallydraggedanddroppedbytheplayer.Thisneedstobesimulatedwhileusingthebuttons.Inordertodoso,let’screateacopyoftheanimateComputerMoving(board,column)methodandrenameitasanimatePlayerMoving(board,column).
10. Inthegame,thecomputerplaystheredcolourcoinswhilethehumanplayerplayswiththeblackcolourcoins.So,let’schangetheanimatePlayerMoving(board,column)methodtosimulatethehumanplayer’scoinmovements.
11. ThefollowingarethemodificationsrequiredintheanimatePlayerMovingmethod:
x=REDPILERECT.left
y=REDPILERECT.top
drawBoard(board,{'x':x,'y':y,'color':RED})
animateDroppingToken(board,column,RED)
12. Similarly,themaingameloopalsoneedstobemodifiedtosimulatethehumanplayer’sgamemoves:
ifturn==HUMAN:

animatePlayerMoving(mainBoard,0)
makeMove(mainBoard,RED,0)
moves_sound.play()
ifisWinner(mainBoard,RED):
winnerImg=HUMANWINNERIMG
break
turn=COMPUTER#switchtootherplayer'sturn
13. Thenextstepistointerfacethebuttonstothegame.Thefollowingcodeneedstobeaddedunderthehumanplayer’sturn:
#waitforabuttonpress
whilecolumn==0:
column=pfio.read_input()
column_position=0
ifcolumn==1:
column_position=0
elifcolumn==2:
column_position=1
elifcolumn==4:
column_position=2
elifcolumn==8:
column_position=3
elifcolumn==16:
column_position=4
elifcolumn==32:
column_position=5
elifcolumn==64:
column_position=6
14. Weusetheread_input()functiontodetectanybuttonpress.Whenabuttonispressed,thereturnedvaluecanbeanywherebetween1and64.Thereturnvalueisusedtoidentifythecolumnpositionandthecoinmovementissimulated.
15. Similarly,themainmenuofthegameneedstobemodifiedtobecontrolledusingbuttons.Thegameislaunchedwhenbutton1ispressedandtheplayerleavesthegamewhenabuttonispressed:
ife.type==EVENT_CHANGE_STATE:
ifstate==0:
rect_list,state=menu.update(e,state)
column=0
whilecolumn==0:
column=pfio.read_input()
pygame.display.update()
ifcolumn==1:
state=1
elifcolumn==2:
state=2
ifstate==1:
menu_sound.stop()
runGame(isFirstGame)

isFirstGame=False
state=0
prev_state=1
elifstate==2:
print'Exit'
pygame.quit()
sys.exit()

Objectivecomplete–minidebriefingInthistask,wecompletedthetransferofcontrolstomakeuseofthearcadestylebuttons.WewillnowproceedtothenextstagewherewewilldiscussthegameAI,marqueedesign,andsoon.


AbriefdescriptionoftheConnectFourGameAIInthistask,wewilldiscussthegeneralmechanismofthegame.Wewilldiscussthefunctioncallsused,gameflow,andageneralideaofthegamemechanism.Itwouldbeagoodideatofollowthiscodereviewalongwiththegamecodeavailableinthisproject.

PrepareforliftoffWearebuildingthisarcadegamebasedonthecodefromMakingGameswithPython&PygamebyAlSweigart(http://inventwithpython.com/makinggames.pdf).Thisbookisaninterestingreadanditshouldenableustobuildourownarcadegame(notnecessarilytheConnectFourgame).

Engagethrusters1. Let’sgetstartedwithreviewingthegeneralstructureofthegameusingtheflowchart
showninthefollowingdiagram:
2. Thefirststepistoimportthemodulesrequiredtolaunchandplaythegame.Thisincludesthepygame,pygame.mixer,piface,andserialmodules.
3. Afterimportingtherequisitemodules,gameparameterssuchasgamedifficulty,boardsizeintermsofwidthandheight,backgroundcolor,windowsize,colorsofthecomputer,andplayercoinsareinitialized.
4. Thegamemenuisinitializedandrenderedonthegamescreentoawaitabuttonpressbytheplayer.
Maingameloop1. Whenthestartbuttonispressed,therunGamefunctioniscalledtostartthegame.If
thegameisbeinglaunchedforthefirsttime,theisFirstGamevariableissettotrue.Thecomputeralwaysplaysfirstfortheveryfirsttimeafterthegameislaunchedandthefirstturnisrandomizedforconsecutiveplays.
2. Whenanewgameisinitialized,thegetNewBoardmethodiscalledtocreateanemptyboardobjecttogetstartedwiththegame.Allgamemovesbythecomputerandthehumanplayerarerecordedtothisobject.Thisisusedtodeterminewhetherthereisa

winneraswellasthecomputertodeterminepotentialmovestoplaythegame.3. Onceweenterthemaingameloop,thegameloopisdividedintotwotasks,the
computerandthehuman’sturn.4. Whenitistheplayer’sturn,wewaitfortheplayertoplaytheirturnusingthe
buttons.Whenabuttonpressisdetected,usingtheanimatePlayerMovingmethod,acoindropissimulated.Thegame’sboardobjectisupdatedwiththelatestmove.
5. Thisisfollowedbythecomputer’sturn.ThegetComputerMovemethodcallsthegetPotentialMovesfunctiontodeterminethebestpossiblemovesavailableforthecomputer’sturn.Then,thecomputer’scoindropissimulatedusingtheanimateComputerMoving()method.
6. ThegameAIrunsacheckaftereachturnhasbeenplayedtodeterminewhethertheplayerorthecomputerisawinnerusingtheisWinnermethod.
7. Ifeitherofthemhaswonthegame,animagedeclaringthewinnerischosen.Thegamealsocheckswhetherthegamewasatie.Wheneitheroftheearliermentionedthreeeventsoccur,theprogrambreaksoutofthegameloopanddisplaysthewinner(oratie)andwaitsforthestartbuttoneventtoreturntothemainmenu.Consequently,thiswillenableyoutostartanewgame.

Objectivecomplete–minidebriefingNowthatthecodereviewiscomplete,let’smoveontothenexttasktoimplementasimplemarqueeandwireuptheinputbuttons.


Marqueedesignandcontrol(optional)Inthistask,wewillimplementthemarqueecontrolforourarcadegame.Wewilldisplayinformationsuchastheplayer’sturn(whetheritisthecomputerorthehumanplayer’sturn),thewinnerofthegameattheend(orwhetheritwasatie),orgame-specificmessagesonthemarquee.WewillusethePiLiteLEDMatrixdisplay(http://shop.ciseco.co.uk/pi-lite-lots-of-leds-for-the-raspberry-pi-1206-red/)thatcanbeusedtoscrollmessagesacrossthedisplay.
PiLite–Courtesy:TheCisecoPLCwebsite

PrepareforliftoffThePiLitedisplaycanbepurchasedfromtheCisecoPLCwebsite(http://shop.ciseco.co.uk/pi-lite-lots-of-leds-for-the-raspberry-pi-1206-red/).Thedisplaycostsabout33USD.
Oneoftherequirementsistheseriallibrary,whichisrequiredtocontrolthedisplay.Itcanbeinstalledasfollows:
sudoapt-getinstallpython-serial
Oncewearedoneinstallingthemodule,weshouldbeabletoimportthemoduleandstartprogrammingthemessagesinourgame.TheCisecoPi-LiteGitHubrepositorycomeswithexamplessuchastheBarScrollexample.Itisessentialthatyoudownloadsuchexamplesandtestifthepython-serialmoduleisfunctionallycorrect.

Engagethrusters1. Wewillgetstartedbyimportingtheserialmoduleandinitializingtheserialport
parameters,includingthebaudrateandportname:
importserial
serialport=serial.Serial()
serialport.baudrate=9600
serialport.timeout=0
serialport.port="/dev/ttyAMA0"
2. Afterinitialization,theserialportisopenedtostartscrollingthemessagesacrossthedisplay:
try:
serialport.open()
exceptserial.SerialException,e:
sys.stderr.write("couldnotopenport%r:%s\n"%(port,e))
3. Asanexample,wewilldisplaytheWelcometoConnectFourGamemessageinthemaingamemenu:
column=pfio.read_input()
serialport.write("WelcometoConnectFourGame")
pygame.display.update()

Objectivecomplete–minidebriefingInthistask,wefinishedintegratingtheLEDdisplaytoRaspberryPithatrunsthegame.


SetupoftheswitchesusingacardboardboxInthistask,wewilldesignourarcadegamecabinetusingcardboard.Wewillusecabletiestomountthecomponentsofourarcadegame.Wewillleaveittothereadertodesignabettercabinetusingtoolsoftheirchoice.

PrepareforliftoffWeshouldputtogetheramonitor,RaspberryPi,speakers,andthepushbuttonsusedtoplaythegame.Wealsoneedplentyofcardboardtoprototypethedesignofourcabinet.

Engagethrusters1. Let’sgetstartedwithmountingtheswitches.Theswitcheswillbemountedontoa
cardboardbox.2. Wegetstartedbymountingthearcadestylepushbuttonsonacardboardbox.The
arcadestylepushbuttonsusedinthisprojectrequireaholethatis1.13inchesindiameter.Carefullycreatetheholesusingasharpobject.
NoteDonothurtyourselfwhilehandlingsharpobjects.Parentalsupervisionisrequiredifchildrenareworkingonthisproject.
3. Oncethemountingholesarecutoutofthecardboardbox,weneedtomounttheswitchesasshowninthefollowingimage.Theswitchesarelockedinplacebyalocknutfromthebackside.
4. ThenextstepistointerfacethebuttonstothePiFacemodule.ThePiFacemanualdescribesthatthedigitalinputshavepullupresistorsandhencetheswitchescanbeconnectedasshowninthefigurethatfollows:
5. ThecommonterminalofthebuttonneedstobeconnectedtothegroundterminalofthePiFacemodule.Thenormallyopen(N.O.)terminalofthebuttonisconnectedtothedigitalinputterminals(S0throughS7)ofthePiFacemodule.

SuggestedinputconnectionsprovidedbythePiFacemanual
6. ThenextstepistoconnectamonitortoRaspberryPi.ThefollowingfigureshowsamonitorwiththeConnectFourgamelaunchedandtheswitchesmountedontoacardboardboxandinterfacedwiththePiFacemodule:


Objectivecomplete–minidebriefingInthistask,wefinishedsettingupthedesktopConnectFourgameusingRaspberryPi.


MissionaccomplishedInthisproject,weaccomplishedthefollowing:
1. WeusedaPythonscriptfortheConnectFourGameandtweakedittoourrequirements.
2. Weimplementedinputcontrolsusingarcadestyleswitches.3. Wewroteaprogramtocontrolthemarquee.4. Wealsosetupthingsonacardboardboxtoplaythegame.


HotshotchallengeInthisproject,weperformedcontroloftheinputswitchesasablockingoperation.Canyoufigureouthowtomonitorswitchpresseventsbystartingmultiplethreads?Howcanweimprovethespeedofthegame?

References1. MakingGameswithPythonandPygameisavailableat
http://inventwithpython.com/makinggames.pdf.2. PiFaceGuidescanbefoundathttp://www.piface.org.uk/guides/.3. Pi-LiteUsers’Guidecanbefoundathttp://openmicros.org/index.php/articles/94-
ciseco-product-documentation/raspberry-pi/280-b040-pi-lite-beginners-guide.


Chapter9.TheRaspberryPi-enabledPet/WildlifeMonitorInthisproject,wewilldiscusshowtheRaspberryPicaninteractwithotherdevicesonanetwork.Thisdevicecaneitherbealaptop,anArduino,oranyotherdeviceconnectedtoanetwork.WewillmakeuseofthecapabilityoftheRaspberryPitoactasacontroldeviceinthenetworkandimplementasimplesolutionthatcansafelyinteractwithourpreciouslittleanimalfriends.

MissionbriefingInthisproject,wewilllearntobuildaninteractivepetorwildlife(wecallitwildlifeinthecontextofanimalsthatarenotdomesticated,forexample,wildcats)monitorthatcanbemonitoredandcontrolledwithinanetwork(withsomeextraeffortyoushouldbeabletocontrolanywhereontheWeb).ThisprojectpresentsthreedifferentpossibilitieswherewecanmakeuseoftheRaspberryPiincombinationwithotherdevicestobuildaninteractivedeviceforpetsthatdispensetreatstointerfacewithdevicesthateitherinteractwithpets/feralcats/birds.Thisinteractivedevicecaneitherbeacamerathatcapturesamoment(forexample,awildbirdcomingandeatingoutofyourbirdfeeder)orarelayboardactivatedtofeedtreatstoouranimalfriendwhileweareawayfromhome.
NoteThisprojecthasbeenpresentedasanexampletohelpapersonenhancethequalityoflifefortheiranimalfriends.Thisprojectshouldnotbeconstruedasareplacementofhumaninteractionforouranimalfriends.Wetotallyunderstandthatpetseasethestressinourlivesandthisprojectpresentssomeexamplestomaketheirlivesbetter.

Whyisitawesome?WearedemonstratingthecapabilitiesoftheRaspberryPiwhilebuildingapetmonitor.Thiscanbeadoptedinanyapplicationwherethereneedstobeexchangeofinformationbetweendevices.ThisprojectdemonstratestheuseoftheRaspberryPiinthebettermentofourlivesfromanotherperspective.Ourpetsandotherferalfriends(forexample,birdsorferalcats)thatvisitusareourfamilymembersandwetryourbesttotakecareofthem.OurgoalinthisprojectistomaketheRaspberryPidoourjobbetter.

YourobjectivesInthisproject,wewillexplorethefollowingtopics:
Installingandtestingthepython-twistedframeworkSettingupandtestingSparkCoretointeractwithappliancesInstallingandtestingtheGoogleCoderprojectontheRaspberryPiAbriefoverviewofabirdfeederthattriggersacamera

MissionchecklistForthisproject,wewillneed:
1. ARaspberryPiplusSDcard(atleast4GBinsize)2. Anyoneofthefollowingboards:
AnArduinoEthernetboard(http://arduino.cc/en/Main/arduinoBoardEthernet)ASparkCoreboard(https://www.spark.io/)AnArduinoUnoplusESP8266board(http://www.banggood.com/ESP8266-Remote-Serial-Port-WIFI-Transceiver-Wireless-Module-p-947259.html)AfewresistorsandLEDstotestthingsoutAUSBwebcameraortheRapberryPi’scameramodule


Installingandtestingthepython-twistedframeworkInthistask,wewillreviewthepython-twistedframework(https://twistedmatrix.com/trac/).TheTwistedframeworkisanopensourceevent-drivennetworkenginethatcanbeusedtosendcontrolmessagestootherdevices(forexample,apetfeedercanbeoperatedusingRaspberryPitodispensesolidfoodtoouranimalfriends).ThemessagingprotocoliscalledAMP(AsynchronousMessagingProtocol)whichisavailableathttp://amp-protocol.net/.

PrepareforliftoffTheRaspberryPi(withanSDcardflashedwiththeOSimage)connectedtotheInternetisneededforthistaskalongwithanArduinoEthernetBoard(oranyoneoftheboardsmentionedearlierinthechecklist.Networkconnectivityisessential).Wewillinstallthepython-twistedframeworkandreviewaquickexampletoexchangemessagesbetweenArduinoandtheRaspberryPi.

Engagethrusters1. Thepython-twistedframeworkcanbeinstalledfromtheterminaloftheRaspberry
Piasfollows:
sudoapt-getinstallpython-twisted
2. Oncetheinstallationiscomplete,itistimetoreviewanexampleofthepython-twistedframeworktotesttheframework(http://twistedmatrix.com/documents/current/_downloads/simpleserv.py).
1. Inthistask,wewilllaunchaserverontheRaspberryPiandtrytocommunicatetotheserverwithinthelocalnetwork.
2. Let’smodifytheprecedingexampletobindthepython-twistedservertotheIPaddressofRaspberryPisothatwecanexchangemessageswithotherdevicesonthenetwork.ThisdevicecaneitherbeanArduinooralaptop.
3. WewillmodifythelistenTCPmethodtobindtheservertotheIPaddressoftheRaspberryPiandlistentoincomingmessagesattheportaddress,8000.
reactor.listenTCP(8000,factory,50,'192.168.1.89')
4. ThewebservercanbelaunchedbyexecutingaPythonscript.5. Now,usingalaptopthatisconnectedtothesamenetwork,let’smodifythe
simpleclient.pyscripttosendandreceivemessagestotheserverjustlaunchedontheRaspberryPi(https://twistedmatrix.com/documents/14.0.1/_downloads/simpleclient.py).
6. InordertoconnecttotheserverlaunchedonRaspberryPi,theconnectTCPmethodneedstobemodifiedtoincludetheIPaddressthattheclienthastoconnect:
reactor.connectTCP('192.168.1.89',8000,f)
7. Inthisexample,theRaspberryPiistheserverandthelaptopistheclient.Theserverinthisexampleechoesallincomingmessages.Thus,whentheclientconnectsandsendsamessage,theoutputwillbesomethinglike:
Serversaid:Hello,World!
connectionlost
Connectionlost-goodbye!
3. Nowthatwehaveinstalledtheserver,let’sdiscussasimpleArduinosketchtointeractwiththeserverlaunchedontheRaspberryPi.Thesketchisavailablealongwiththisproject’sdownloads(TwistedFrameworkTest.ino).
1. WewillgetstartedbydeclaringanIPaddressobjectthatincludestheIPaddressofRaspberryPi:
//MACAddressoftheArduino
bytemac[]={0x90,0xA2,0xDA,0x0F,0x02,0xFC};
//IPAddressoftheRaspberryPi
IPAddressserver(192,168,1,89);

2. TheArduinoactsasaTCPclientandconnectstotheRaspberryPi:
if(client.connect(server,8000)){
Serial.println("connected");
client.println("Hello,World!");
client.println();
//Letswaitfortheclienttoreadand
//echothemessage
//Note:Asecond'sdelayisabitexcessive
delay(1000);
//Ifthereisaresponsefromtheserver
//echobackthemessage
Serial.println("Serversays:");
while(client.available()){
charc=client.read();
Serial.print(c);
}
client.stop();
Serial.println("ClientDisconnected");
}else{
Serial.println("connectionfailed");
}
3. TheArduinoclientconnectstotheRaspberryPiandtransmitstheHello,World!message.TheRaspberryPiechoesbackthemessagetotheArduinoclient.Ascreenshotoftheserver’sresponsetotheclientisshownasfollows:

InteractionoftheArduinoclientwiththeRaspberryPi
4. WedemonstratedtheabilitytotransmitandreceivemessagesbetweenArduinoandtheRaspberryPi.

Objectivecomplete–minidebriefingAttheendofthisproject,wewilldiscussmakinguseofthepython-twistedframeworkandanArduinoEthernetboardtohelpyoucontrolacameratriggerorremotelydispensetreatsusingapetfeeder.


SettingupandtestingSparkCoretointeractwithappliancesInthistask,wewillsetupSparkCore.ItisadevelopmentboardthatmakesbringingWi-Fitohardwareveryeasy.WewillusetheCoreforthisprojectbecausewelovethesimplicityofthesetupandoperation.YoucanreadmoreaboutSparkCoreattheofficialwebsite,https://www.spark.io/.
Youarewelcometouseasimilardeviceofyourchoosing.AgoodalternativewillbetouseanArduinowithaWi-Fiadapter/shield(forexample,theESP8266Wi-Fimodulecanbefoundathttp://www.seeedstudio.com/wiki/WiFi_Serial_Transceiver_Module)orifyouprefer,anEthernetshield(asdiscussedintheprevioustaskofthisproject).

PrepareforliftoffInthistask,wewillsetuptheSparkCore.PoweruptheSparkCoreusingamicro-USBcableconnectedtoapowersource(5Vsource).Itcanbepoweredusingabatterypack,alaptop,ora5VUSBwallwart.Basedonyourprojectneeds,youcanuseabatterypackifthesensornodeforthepetmonitorhastobeinstalledoutdoors.
TheeasiestwaytoconnecttheSparkCoretoyourWi-Finetworkisthroughaphoneapplication.ThisandothermechanismsaredetailedontheSparkCorewebsite(http://docs.spark.io/connect/).WewillsetupourSparkCorebydownloadingtheapplicationontoanAndroidphoneandSamsungGalaxyS5throughtheGooglePlaystore(https://play.google.com/store/apps/details?id=io.spark.core.android&hl=en).TheappsearchesforSparkCoresinrangeandifyousupplytheWi-Fipassword,itsendsthecodetotheCore(s)andletsitconnecttoyourWi-Fi.
TheSparkCoreboard

EngageThrustersWewillwarmupbyimplementingtheLEDexampleonSparkCoreorsomethingsimilar.
ThedocumentationincludescodetoconnectanLEDwitharesistortotheCore(http://docs.spark.io/examples/).Wedecidedtodosomethingevensimpler.ThereisalreadyanLEDconnectedtopinD7andwedecidedtoturnthisoneoninstead.
AlltheappsyouneedcanbedownloadedtoacustomwebpageavailableforeachSparkCorethroughausernameandpassword.
OnceyouhavesetuptheCore,youwillcreateausernameandpassword.FordifferentCores,youwillneeddifferentusernames.Usingthis,youcangototheSparkhomepage(http://www.spark.io/)andclickontheBuildbutton.Thistakesyoutothehomepageofthedevelopmentenvironment.
Usingthisdevelopmentenvironment,wecreatedasimpleLEDblinkingapplication:
voidsetup(){
pinMode(7,OUTPUT);
}
voidloop(){
//turntheLEDon(HIGHisthevoltagelevel)
digitalWrite(7,HIGH);
//waitforasecond
delay(1000);
//turntheLEDoffbymakingthevoltageLOW
digitalWrite(7,LOW);
//waitforasecond
delay(1000);
}
NoteTheprecedingcodeiswritteninCprogramminglanguage.Ifyouarejumpingdirectlytothisprojectfromotherprojects,wesuggestthatyoufamiliarizeyourselfwiththeArduinoorSparkCoreplatform.Somelearningresourcesareavailableathttps://learn.adafruit.com/search?q=Arduino
Asyoucansee,theappisquitesimple;theappsetsupthepin7asoutput.TheprogramturnsontheLEDforasecondandturnsitoffforonesecond.
Now,let’sdiscussanexamplethatismoreorlesssimilartotheexamplediscussedintheprevioustask:
TCPClientclient;
//IPAddressoftheRaspberryPi
byteserver[]={192,168,1,89};
voidsetup()
{
Serial.begin(9600);
while(!Serial.available())SPARK_WLAN_Loop();

delay(1000);
Serial.println("connecting…");
if(client.connect(server,8000)){
Serial.println("connected");
client.println("Hello,World!");
client.println();
//Letswaitfortheclienttoreadand
//echothemessage
//Note:Asecond'sdelayisabitexcessive
delay(1000);
//Ifthereisaresponsefromtheserver
//echobackthemessage
Serial.println("Serversays:");
while(client.available()){
charc=client.read();
Serial.print(c);
}
client.stop();
Serial.println("ClientDisconnected");
}else{
Serial.println("connectionfailed");
}
}
voidloop()
{
//Nothingtodohere
}
TheonlydifferencebetweenthepreviousexampleandthisexampleisthatthelatterusestheTCPClientclasswhiletheformerusestheEthernetClientclass.

Objectivecomplete–minidebriefingThat’sit.YounowhaveSparkCore,allsetupandreadytogo,withyourusername,andyourownpagetodownloadappsandcollectandtransmitdatathroughtheCore.


InstallingandtestingtheGoogleCoderprojectontheRaspberryPiThisisprobablythesimpleststageoftheprojectasyoushouldbefamiliarwithsettinguptheRaspberryPiforfirstuse.
TheGoogleCoderisatoolreleasedbyGooglethatenablespeopletolearnwebdevelopmentusingtheRaspberryPi.Itisatoolthatprovidesanintuitivelearningprocess.AfterinstallingtheGoogleCodertool,wewilltestinterfacingtheGPIOpinsoftheRaspberryPitothewebinterface.

PrepareforliftoffWeneedtodownloadtheGoogleCoderimagefromitsrepository.TheGoogleCoderimageisavailableathttp://googlecreativelab.github.io/coder/.

Engagethrusters1. Let’sgetstartedwithsettingupGoogleCoderfortheRaspberryPi.Oncetheimage
isdownloaded,wehavetoinstalltheimageontoanSDcard.IfyouarenotfamiliarwiththeinstallationoftheRaspbianimageontoanSDcard,thefirstprojectofthisbookisreallyhelpful(wethink!).
2. OncetheRaspberryPiispoweredupafterflashingtheSDcard,MacBookusersmaylaunchthetoolfromabrowserbygoingtohttp://coder.local.
3. WindowsusershavetoinstallApple’sBonjourPrintServicesforWindows(http://support.apple.com/kb/DL999).Onceinstalled,theGoogleCodertoolcanbelaunchedusingaChromebrowser.Now,theGoogleCoderplatformcanbeaccessedathttp://coder.local.
4. Thesetupprocessisreallysimple.Ifeverythingwentasplanned,weshouldbeabletoseethelandingpageoftheGoogleCoderapplication.
TheGoogleCoderlandingpage
5. Let’stesttheBlinkyLightsexamplefromtheGoogleCoderprojectavailableathttp://googlecreativelab.github.io/coder-projects/projects/blinky_lights/.Theexampleprovidesdetailedinstruction,includingthecircuitryandcoderequiredtosetupaswitchtoreadbuttonstatesfromtheGPIOinterfaceoftheRaspberryPi(Wechosetoskiptheexplanationastheexamplealreadyprovidesadetailedelaborationoftheexamplecode).
6. TheBlinkyLightsexampledemonstratestheuseofthenode.jsbasedGPIOhelper(https://www.npmjs.com/package/pi-gpio)toread/writeGPIOpins.

Objectivecomplete–objectivecompleteWewillmakeuseofthethreetasksdiscussedinthisprojecttoputtogetheratriggerthatcomestoeatoutofabirdfeeder.


AbriefoverviewofabirdfeederthattriggersacameraInthistask,wewillsetupabirdfeederwithamotionsensor.Wheneverabirdfliesintofeedonthegrainsoutofthefeeder,themotionsensoristriggeredtosendamessagetotheRaspberryPi.AcameramoduleoraUSBcameraisconnectedtotheRaspberryPi,whichcapturessomebeautifulmomentsinourbackyard.
SrihariYamanoor(oneoftheauthorsofthisbook)hasanextensivebackyardwherethisbirdfeederhasbeeninstalled.Checkoutthisbook’swebsitetofindoutwhetherwehavecapturedanybeautifulmomentsthusfar!

PrepareforliftoffInordertobuildthisinteractivepetfeeder,weneedthefollowingitems:
Apetfeeder.(Availablefromhomeimprovementstores,forexample,HomeDepot,Lowes,andsoon).ThePIRsensor(http://www.adafruit.com/product/189).SparkCoreoranyWi-Fienabledboard.AUSBbatterypack(http://www.adafruit.com/products/1959).rd(http://www.adafruit.com/products/64).RaspberryPiwithaTwistedframeworkinstalled.ARaspberryPicameramodulewithalensattachment.Forexample,http://store.cutedigi.com/raspberry-pi-camera-module-5mp-wide-angle-160-degree/.
Engagethrusters1. ThefirststepinvolvedinprogrammingSparkCoreistodetectthemotionsensor
eventsandpublishthoseresultstoRaspberryPi.2. ThesensorneedstobeconnectedtoSparkCoremountedonthebreadboardasshown
inthefollowingfigure:
AmotionsensorconnectedtoSparkCore
3. WewillmodifytheexamplefromAdafruitthatprintsthemotionsensorevents(https://learn.adafruit.com/pir-passive-infrared-proximity-motion-sensor/using-a-pir).
4. Wheneveramotioneventisdetected,weneedtosendanalerttothepython-twistedserverlaunchedonRaspberryPi:
if(client.connect(server,8000)){
Serial.println("MotionDetected");
client.println("MotionDetected");
client.println();
//Letswaitfortheclienttoreadand
//echothemessage
//Note:Asecond'sdelayisabitexcessive
delay(1000);
client.stop();
Serial.println("ClientDisconnected");
}else{
Serial.println("connectionfailed");
}
5. Inordertotakepicturesofthebirdfeederwhenthereisanincomingmotiondetectionevent,thecamerahastobeinterfacedtotheRaspberryPiasdemonstratedinthevideoprovidedbytheRaspberryPiFoundation(https://www.youtube.com/watch?v=GImeVqHQzsE).
6. Inordertotriggeracameratotakeasnapshotusingthepython-twistedserver,we

needthepicameramodule(https://pypi.python.org/pypi/picamera).Itcanbeinstalledasfollows:
sudoapt-getinstallpython-picamera
7. Let’smodifythepython-twistedexample,simpleserv.py,toimportthepicameraanddatetimemodules(tonamethepicturescapturedbythecamerausingatimestamp).
8. IftheincomingmessageisMotionDetected,wewilltakeapictureandnamethefileusingatimestamp.
9. Inthecallbackmethod,DataReceived,let’scaptureanimage:
withpicamera.PiCamera()ascamera:
camera.start_preview()
time.sleep(2)
camera.capture('img{timestamp:%Y-%m-%d-%H-%M}.jpg')


Abirdtrigger

Objectivecomplete–minidebriefingCheckoutthisbook’swebsitetolookattheRaspberryPiandSparkSensorsetupthatisusedtotakepictures.Thisisreallyhelpfultolearnmoreaboutthebirdsinyourneighborhood.
Alternativesandprojectideastoconsider1. Inthisproject,wediscussedtheexamplesusingtheSparkCoreandtheArduino
Ethernetboard.AnotherexampletoconsideristheEPS8266module,whichisavailableathttp://www.banggood.com/buy/Esp8266.html,andcostsabout3USD.Refertothisbook’swebsiteforsettinguptheESP8266moduletoemulatetheseexamples.
2. InProject4,ChristmasLightSequencer,weusedaPowerSwitchTailandarelayboardexampletocontroldecorativeappliances.Similarly,wecanusethemtocontrolautomaticpetfeederstodispensetreats.


MissionaccomplishedInthisproject,weinterfacedbuiltasmallecosystemofdevicesthatweremonitoredbytheRaspberryPi.Weusedthoseexamplestobuildabirdfeeder!


HotshotchallengeInthisproject,wediscussedinterfacingasensortotakepicturesofbirdsthatcometofeedfromthebirdfeeder.Isitpossibletouploadthevideofeedtosomewherethat’ssecureovertheInternet?Howdowedothis?


Chapter10.RaspberryPiPersonalHealthMonitorInthisproject,wewilldiscussimplementingasolutionwhereRaspberryPiactsasapersonalhealthmonitor.Wewouldliketodedicatethisprojecttoallthepeoplewhohavebeendiagnosedwithtype2diabetesoranyotherlifestylediseases.Thisprojectpresentssometricksforthosediagnosedwithsuchlifestylediseases.
NotePleasedonotconsiderthisprojectasanalternativetoexistingtreatmentandpractices.Thisproject’strickswillhelpyouleadabetterlife.Forexample,yourRaspberryPicanremindyoutotakeyourprescribedmedication(ifany).

MissionbriefingInthisproject,wewillbuildsomesolutionstoaddresscommonproblemsencounteredbypeoplewithlifestylediseases.SimilartoProject6,RaspberryPiasaPersonalAssistant,thisprojectpresentsdifferenttipsandtrickstoleadabetterlifeineachtask.Wewilldiscussexampleswhereapersoncanbuildasimplewebservertostorehis/herdailyvitalhealthparameters(forexample,bloodpressure,bloodoxygensaturationlevels(SpO2),andsoon).Also,theservercanhelpapersontoremainphysicallyactivethroughtheday,provideaquickrecapofthee-mailparser,providetheeventremindertoolfromProject6,RaspberryPiasaPersonalAssistanttoremindapersonaboutupcomingappointments,refillhis/herprescriptions,andsoon.

Whyisitawesome?Wedecidedtowritethisprojectbasedonthepersonalexperienceofoneoftheauthors’familymember.Itisquitestressfulforapersonwhenhe/sheisdiagnosedwithachronicconditionssuchastype2diabetes.Thepersonissubjectedtostressfulconditionsrelatedtochangeindailyfoodhabits,developingahabitofconsumingmedicationeveryday,andbeingmindfulofwhathe/sheeatseverydaywhilstensuringthattheircriticalhealthparametersareintact.Itisobviouslydifficulttoacceptasuddenchange,andthisprojectpresentssomeoptionstomitigatesuchdifficultiesandbringtheperson’shealthbackontrack.

YourHotshotobjectivesInthisproject,wewillreviewthefollowingexamples:
SettingupawebservertorecordhealthparametersAsimplephysicalexercisetoolusingRaspberryPiSettingupane-mailfeedparsertorefillaprescriptionaswellasremindtheuseraboutanupcomingdoctor’sappointmentAsimpletoolthatremindsapersontotakehis/herpills

MissionchecklistItwouldbegreattohavethefollowingcomponentsforthisproject:
ARaspberryPialongwithanSDcard(ofatleast4GBinsize)thathasbeenflashedwithanimageandrequisitepowercable.AnArduinoEthernetboard(http://arduino.cc/en/Main/arduinoBoardEthernet).Thisiscompletelyoptional.Atactileswitch,resistors(10K),andapiezoelectricbuzzer(allthesecomponentsareavailablefromRadioShack).ItwouldbegreattohavetwoRaspberryPiboardstobuildthephysicalexercisetoolusingRaspberryPi.


SettingupawebservertorecordhealthparametersInthistask,wewillbuildasimplewebserverthatcanbeusedtomaintaincriticalhealthparameters.Let’sconsiderascenariowhereapersonisdiagnosedwithhighbloodpressure.Thedoctorasksthepatienttorecordhis/hervitalhealthparameterssuchaspulse,oxygenlevel,orbloodpressure.Forthissituation,wewillbuildasimplewebpagethatrecordsthedataandstoresitinaCSVfile.

PrepareforliftoffWewillbeusingtheFlaskframework(http://Flask.pocoo.org/)todeploythewebserveronRaspberryPi.WemadeuseoftheFlaskframeworkinProject4,ChristmasLightSequencer.JustincaseyouskippedthroughProject4,ChristmasLightSequencer,aPythonpackagemanagersuchaspiporeasy_installisrequiredtoinstalltheFlaskframework:
sudoapt-getinstallpython-pip
AftertheinstallationofthePythonpackagemanageriscomplete,theFlaskframeworkmaybeinstalledasfollows:
sudopipinstallFlask

Engagethrusters1. WewillmodifythisbasicFlaskframeworkexample
(http://runnable.com/UhLMQLffO1YSAADK/handle-a-post-request-in-Flask-for-python)totakeinputfromabrowser:
Inthefrontendofthewebserver,let’screatetextboxesintheform_submit.htmlfilewherewecanenterthebloodpressure,oxygensaturationlevels,andpulsedata.Thelandingpagewilllookliketheoneshowninthefollowingfigure(whenopenedinabrowser):
Theformusedtorecordvitalhealthparameters
InthePythonscriptthatlaunchesthewebserver,wereadthesubmittedparametersandwritethemtoaCSVfilealongwithatimestamp:
@app.route('/',methods=['POST'])
defrecord():
#recordallthedatafromtheform
bloodPressure=request.form['BloodPressure']
SpO2=request.form['SpO2']
pulse=request.form['pulse']
#beforewritingtoacsvfile,logtimestamps
date=datetime.today().strftime('%Y-%m-%d')
time=datetime.now().strftime('%H:%M:%S')
logfile=open('static\\comments.csv','a')
logfile.write(",".join([date,time,bloodPressure,SpO2,
pulse,'\n']))
logfile.close()
return
render_template('form_action.html',date=date,time=time,bloodPressur
e=bloodPressure,SpO2=SpO2,pulse=pulse
Oncewe’redonewritingtotheCSVfile,weredirectthesubmittedformtoa

pagethatdisplaystherecordedvaluesalongwiththetimestamp(asshowninthefollowingfigure):
Thepagedisplayedaftertheresultsarerecorded
2. ItispossibletoviewtherecordeddataonthewebpagebyreadingtheCSVfile.Weleavethisforyoutofigureout(lookatthisbook’swebsitefortheanswer).

Objectivecomplete–minidebriefingWebuiltasimpleFlask-framework-basedwebservertorecordvitalhealthparametersusingRaspberryPi.Itispossibletoe-mailthedataatregularintervalsusingthesmtpmoduleinPython.


AsimpleexercisetoolusingtheRaspberryPiInthistask,wewillreviewafunexamplethatenablesapersontobephysicallyactiveevery60minutes.

PrepareforliftoffThisexampleisbasedontheTwistedframeworkdiscussedinthepreviousproject.ItwouldbegreattohavetwoRaspberryPiboards(setupwiththeSDcardimagesandpoweredup)oranArduinoEthernetboard.AlaptopthatisconnectedtothesamenetworkastheRaspberryPiisjustassufficient.
IfyoumissedinstallingtheTwistedframeworkinthepreviousproject,theTwistedframeworkcanbeinstalledasfollows:
sudoapt-getinstallpython-twisted
NoteIftheseconddeviceisaRaspberryPioralaptopthatrunsLinux,Mac,orWindowsoperatingsystems,theTwistedframeworkneedstobeinstalledontheseconddeviceaswell.

Engagethrusters1. Let’sperformaquickreviewofwhatwewillbuildinthisproject:
Let’sconsidertwodevicesthatcanbeconnectedtoanetwork.OneofthedevicesisaRaspberryPiwhiletheotherdevicecouldeitherbeanArduinooraRaspberryPi.Wewillreviewthecoderequiredtobuildthistoolforbothcases.Thesedeviceshavetobeinstalledattwoextremecornersinsideahouse.Thiscanbedifferentfloorsofthehouseorthefarthestcornersofthehouse.AbuzzerandabuttonwillbeconnectedtoaRaspberryPi.Thebuzzerwouldgooffevery60minutesononeofthedevices.Someonehastowalkuptothedeviceandturnoffthebuzzerbypressingabutton.
Thisenablesapersontogetsomephysicalactivitybywalkingbackandforthbetweenthetwodevices(assumingtheRaspberryPidevicesareinstalledfarawayfromthepersonintheinterestofgainingsomephysicalactivity).
NoteThisexampleisjustamotivationaltoolandacasualreminderfortheconcernedpersontoremainphysicallyactive.
2. ThebuzzerandtheswitchareconnectedtotheRaspberryPiasshowninthefollowingdiagram:
AbuttonandbuzzerschematiccreatedusingFritzing
TheprecedingbreadboardrepresentationshowsanAdafruitPiCobblermountedonabreadboard.RefertoProject4,ChristmasLightSequencer,forapictorialrepresentationofhowthePiCobblerneedstobeconnectedtotheRaspberryPi.
GPIO#25oftheRaspberryPiisconnectedtothebaseoftheNPNtransistor,BC547.Thetransistor’scollectorpinisconnectedtothenegativeterminalofthebuzzer.Theotherendofthebuzzerisconnectedto5V.Theemitterpinofthetransistorisconnectedtotheground.Thetransistoractsasaswitchandturnsonthebuzzerwhenthebasepinissettohigh.GPIO#18oftheRaspberryPiispulledupto3.3VandatactileswitchisconnectedtotheGPIOswitch.Theotherendoftheswitchisconnectedtotheground.
3. Let’sperformaquickreviewofthetwistedservercodethatrunsontheRaspberryPi.Similartothepreviousproject,thisexampleisalsoasimplemodificationoftheTwistedframeworkexample,simpleserver(http://twistedmatrix.com/documents/current/_downloads/simpleserv.py).
Let’screateaclassthattakescareofsettingoffthebuzzerwhenthereisanincomingmessage:
#Declareinputsandoutputs.
GPIO.setmode(GPIO.BCM)
GPIO.setup(18,GPIO.IN)
GPIO.setup(25,GPIO.OUT)
GPIO.setwarnings(False)
classAsyncTask:
def__init__(self):
self.run_state=True
#avoidingthechannelargumentthrowsanerror
defterminate(self,channel):
self.run_state=False
defadd_callback(self):
GPIO.add_event_detect(18,GPIO.FALLING,callback=self.terminate)
defrun(self):
whileself.run_state==True:
GPIO.output(25,GPIO.HIGH)
time.sleep(1)
GPIO.output(25,GPIO.LOW)
time.sleep(1)
GPIO.remove_event_detect(18)
IntheAsyncTaskclass,thebuzzercanbesetoffbytriggeringaseparatethreadtocalltherunfunction.Thissetsoffthebuzzerwithaone-secondinterval.Theadd_callbackmethodisusedtoturnoffthebuzzerwhenthebuttonispressed.Theadd_event_detectmethodwaitsforthestateofGPIO#18tochangefromhightolow.Thisturnsoffthebuzzerbysettingrun_statetoFalse.Whileexitingtheinfiniteloop,weremovethecallbackfunctionsusingtheremove_event_detectmethod.Whenaclient(Arduino,laptop,oranotherRaspberryPi)sendsamessagetotheserver,thethreadisinitializedandacallbackfunctionisregisteredasfollows:
async_task=AsyncTask()

async_task.add_callback()
thread=Thread(target=async_task.run,args=())
thread.start()
Tosummarize,anincomingmessagetriggersthebuzzerandapersonhastowalktotheRaspberryPi’slocationtoturnoffthebuzzer.
4. IftheclientdevicethatsendsamessagetotheRaspberryPiisalaptopthatrunsaLinux,Mac,orWindowsoperatingsystemortheRaspberryPi,itissufficienttorunthesimpleclient.pyexampleaftermodifyingthecodetochangetheserveraddresstothatoftheRaspberryPi(https://twistedmatrix.com/documents/14.0.1/_downloads/simpleclient.py).
5. Intheprecedingexample,wedemonstrateasinglecycletosetoffthebuzzer.Thiscanberepeatedincyclesof60minutesusingabatchscript(inaWindowsenvironment)orashellscript(LinuxorMacenvironment).
6. IfthedeviceisanArduino,EthernetClienthastobeinitializedandconnectedtotheRaspberryPitosendatestmessage.Thiscanberepeatedina60-minutecycle:
Serial.println("connecting…");
if(client.connect(server,8000)){
Serial.println("connected");
client.println("Hello,World!");
client.println();
//Letswaitfortheclienttoreadand
//echothemessage
//Note:Asecond'sdelayisabitexcessive
delay(1000);
//Ifthereisaresponsefromtheserver
//echobackthemessage
Serial.println("Serversays:");
while(client.available()){
charc=client.read();
Serial.print(c);
}
client.stop();
Serial.println("ClientDisconnected");
}else{
Serial.println("connectionfailed");
}
AminiprojectideaItwillbefuntoinstallanumberofRaspberryPiboardsinthesamenetworkandimplementanasynchronousmessagingprotocol.Thisprotocolcansetoffbuzzersasachainreactiontoencouragemorephysicalactivity.Pleasenotethatthismayannoyothermembersofthehousehold.

Objectivecomplete–minidebriefingWediscussedatoolthatcanannoyapersontoremainphysicallyactive.


Settingupane-mailfeedparsertorefillaprescriptionaswellasremindtheuseraboutanupcomingdoctor’sappointmentInthistask,wewilldiscusssettingupanLEDtoalertapersonaboutanincominge-mailtorefillaprescriptionorwhenthereisanupcomingdoctor’sappointment.
JustincaseyouskippedthroughProject6,RaspberryPiasaPersonalAssistant,thepython-feedparsertoolandthepython-gdatatoolhavetobeinstalled:
sudoapt-getinstallpython-feedparser
sudoapt-getinstallpython-gdata
NoteThistaskissimilartothee-mailnotifierwesetupinProject5,InternetofThingsExample–AnE-mailAlertWaterFountain.WewilljustdiscussaminormodificationtoblinkanLEDwhenthereisane-mailintheinboxtorefillaprescription.

Engagethrusters1. Wewillgetstartedbycheckingforanynewincominge-mails:
email=feedparser.parse(proto+username+":"+password+"@"+server+path)
2. Let’sassumetheprescriptionrefillremindere-mailsubjectiscalledWalgreens.WewilliterativelycheckthrougheachentryandtriggeranLEDalert:
formailinemail.entries:
ifmail.title=="Walgreens":
async_task=AsyncTask()
async_task.add_callback()
thread=Thread(target=async_task.run,args=())
thread.start()
AnasynchronoustaskcanbetriggeredtoblinkanLEDuntilthealertisacknowledgedbypressingabutton.Thecircuitryissimilartotheonediscussedintheprevioustask.
3. Thisenablesapersontorespondtoane-mailandrefillhis/herprescriptionwhennecessary.Thispreventsarefillremindergettingburiedamonge-mailsandenablesthepersontokeepatabonprescriptiondelays.
Settingupareminderfordoctor’sappointmentsThisisalsosimilartotheeventnotifierthatwediscussedinProject6,RaspberryPiasaPersonalAssistant.Let’sassumethatalldoctor’sappointmentsaresavedinthecalendarasDoctor'sappointment.Itispossibletoprominentlydisplayallupcomingdoctor’sappointmentsasfollows:
fori,an_eventinenumerate(feed.entry):
ifan_event.title.text=="Doctor'sappointment":
print'\t%s.%s'%(i,an_event.title.text,)
Intheprecedingexample,wearejustprintingittoaconsole.Youcanperhapsmakeuseofadisplay,forexample,anOLEDdisplaythatiscontrolledviaaserialport,anddisplayitataprominentlocation.

Objectivecomplete–minidebriefingInthistask,wecompletedthesetupofane-mailnotifiertorefillprescriptionsandareminderforanupcomingdoctor’sappointment.


Asimpletoolthatremindsapersontotakehis/herpillsInthistask,wewillbuildasimpletoolthatremindsapersontotakehis/herpillsontime.Thecircuitryrequiredforthisexampleissimilartotheexamplesdiscussedintheprevioustasks.Wearediscussingthisexamplebecauseitisdifficultforsomeonetodevelopahabitoftakingtheirmedicationontime.Itiscriticalthatpeopleidentifiedwithchronicconditionsdonotmisstheirprescriptionschedule.

PrepareforliftoffWeextensivelydiscussedinterfacingthebuzzertoaRaspberryPiintheprevioustask.It’llbenicetohaveanenclosureforthepillboxreminder.Anexampleofapillreminderisavailablefrominstructablesathttp://www.instructables.com/id/The-Pill-Reminder/.Wewillonlydiscusshowtotriggerthebuzzerataselectedtimeoftheday.

EngagethrustersLet’ssayapersonhastotakehis/herprescribedpillsat9:30inthemorning;abuzzercanbetriggeredusingthedatetimemoduleinPython:
whileTrue:
t=datetime.datetime.now()
ift.hour==9andt.minute==30:
async_task=AsyncTask()
async_task.add_callback()
thread=Thread(target=async_task.run,args=())
thread.start()
break
OtherprojectideasSimilartotheexamplesdiscussedearlier,itisalsopossibletosetreminderstosyncpedometerdata,gotothegym,orevenrecordthehealthparametersdiscussedearlierinthisproject.

Objectivecomplete–minidebriefingInthistask,wecompletedthepillboxremindersetuptohelpustakeourmedicationontime.


MissionaccomplishedInthisproject,wediscussedseveralexamplesofRaspberryPiactingasapersonalhealthmonitorusingasimpleconcept.Thiscanbeadaptedfordifferentscenariosaccordingtoyourcreativity.


HotshotchallengeHowcanweuseRaspberryPitoenhancethelivesofseniorcitizens?


Chapter11.HomeAutomationusingRaspberryPiInthisproject,wewillreviewsomeautomationexamplesusingRaspberryPi.Theseexamplescanbeconsideredasprojectsthatcanbeexecutedoveraweekend.

MissionbriefingInthisproject,wewilldiscussdifferentoptionsavailableforautomationathomeusingRaspberryPi.Theexamplesuseasimilarconcept(moreorless)andyoucanpickthetasksofyourchoiceandturnyourhomeintoasmarthome.

Whyisitawesome?AquickwebsearchyieldsalotofprojectsrelatedtohomeautomationusingRaspberryPi.Wehavetriedtokeepthisprojectuniquebyensuringthatitissimpleenoughtobeexecutedoveraweekend(thoughsomeexamplesmightappearrepetitiveifyouhavebeenreadingthroughtheprojectsintheircorrectorder),whileincorporatingfeedbackfromprojectsavailableallovertheWeb.

YourobjectivesWewilldiscussthefollowingexamplesinthisproject:
AsimpleexamplethatcontrolslimitedindoorandoutdoorlightingintheeveningAcustomarywebserverexampleTurningonalawnsprinkleronlywhenthereisanorainforecast!

MissionchecklistThefollowinghardwareitemsarerequiredforthisproject:
1. RaspberryPialongwiththenecessaryaccessories(anSDcard—atleast4GBinsize,1AUSBpowersupply,andamicro-USBpowercable).
2. PowerSwitchTailIIfromAdafruitthatisavailableathttp://www.adafruit.com/product/268.
3. Ethernetcables/Wi-Fiadapter(optional,neededtoconnecttheRaspberryPitoanetwork).
4. Sensorsofyourchoice.Forexample,Soilmoisturesensor.5. Generalhardwarefromthelocalstore(thisdependsuponthereader’sproject
requirements).6. ArduinoEthernetBoard(optional)availableat
http://arduino.cc/en/Main/arduinoBoardEthernet.
Wewillinstallthesoftwareprerequisitesaswerevieweachexampleinthisproject.

AsimpleexamplethatcontrolslimitedindoorandoutdoorlightingintheeveningLet’sconsiderascenariowhereapersonlivesinaneighborhoodthatisnotsowelllit.Inwinter,thetemperaturesareusuallyextremeincitiessuchasChicagoandthesunusuallysetsaround5p.m.Thepoorlylitneighborhoodalongwiththecoldweathermakesitdifficultforapersontoentertheirhome.
Wewillbuildasimplesolutionthatturnsonalight(thatcanbeeitheranoutdoororindoorhallwaylight)thatspeedsuptheprocessofenteringabuilding.

PrepareforliftoffInthisexample,wewillmakeuseofPowerSwitchTail2(soldbyAdafruitIndustries:http://www.adafruit.com/product/268)toturnon/offthelights.
ThePowerswitchtailisratedtocontrolappliancesratedtooperateat110Vanditcanswitchresistiveloadsupto15A.ThePowerSwitchTail2canswitchon/offapplianceswhenitisactivatedbya3-12VDCsignal.
OnemainadvantageofusingthePowerSwitchTail2isthatitisopto-isolated(opto-isolationensuresthatRaspberryPiisprotectedfromanytransientvoltageswhileturningon/offthelights)andprovidesasafealternativetointerfacingelectricalappliancestoRaspberryPi.TheimagebelowshowsaPowerSwitchTail2availablefromhttp://www.adafruit.com.
PowertailswitchII–Photocourtesy:adafruit.com
SoftwareprerequisitesWewillneedtherepositorytoolGit.Thiscanbeinstalledasfollows:
sudoapt-getgit-core

Engagethrusters1. PowerSwitchTail2’sdatasheet
(http://www.adafruit.com/datasheets/PST%20II%20product%20insert.pdf)providesaschematicdescriptionoftheinternalcircuitryofPowerSwitchTail2.
PowerSwitchTail2isconnectedtoRaspberryPiasshowninthefollowingfigure.Thein+terminaloftheswitchisconnectedtotheGPIO#17ofRaspberryPi,whilethein-terminalisconnectedtothegroundpinofRaspberryPi.
PowerSwitchTail2’sinterfacetoRaspberryPi
ThepowercordtothelightingequipmentneedstobeconnectedtoPowerSwitchTail2.
NoteItisassumedthatyouarefamiliarwithsomeminorrewiringtoconnectindoor/outdoorlightingappliances.Priortrainingisrequiredtohandlesuchelectricalhardware.Ifyouarenotfamiliarwithhandlingrewiring,itisbesttoconnectanoff-the-shelfelectricalappliance.
2. Let’sreviewthecodeforanexamplewherethelightsneedtobeturnedonbetween5:30p.m.and10:45p.m.everyday.
WegetstartedbycreatingUnixtimestampsforthestartandendtimes(UnixtimestampsreferstothetimeelapsedsinceJanuary1,1970inseconds.Moreinformationisavailableathttp://en.wikipedia.org/wiki/Unix_time):
#Getcurrenttime
now=datetime.datetime.now()
#Createdatetimeobjects
startTime=datetime.datetime(now.year,now.month,now.day,17,30,0)

endTime=datetime.datetime(now.year,now.month,now.day,22,45,0)
#Createunixtimestamps
unixStart=(startTime-
datetime.datetime(1970,1,1)).total_seconds()
unixEnd=(endTime-datetime.datetime(1970,1,1)).total_seconds()
unixNow=(now-datetime.datetime(1970,1,1)).total_seconds()
TheUnixtimestampsareusedtocheckwhetheritistimetoturnon/offtheappliances:
if(unixStart<=unixNow<=unixEnd):
GPIO.output(25,GPIO.HIGH)
while(unixStart<=unixNow<=unixEnd):
now=datetime.datetime.now()
unixNow=(now-
datetime.datetime(1970,1,1,0,0,0)).total_seconds()
print"Triggered",now.hour,":",now.minute,":",now.second
sleep(1)
GPIO.output(25,GPIO.LOW)

Objectivecomplete–minidebriefingYay!Wearedonewithasimpleautomationtaskofkeepingthelightsonatagiventimeperiodeveryday.
Alternativesolutionsandsomeprojectideastoconsider1. IfitisnotpossibletoinstallRaspberryPirightnexttothepowertailswitch,itis
possibletointerfacethePowerSwitchTail2toanArduinoEthernetboardandcontrolledbyRaspberryPiusingtheTwistedframeworkexample(hint:refertotheexamplesfromthepreviousproject,Project10,RaspberryPiPersonalHealthMonitor).ThisenablesyoutocontrolanetworkofdevicesusingRaspberryPi.
2. OnealternativetoconsiderifitisnotpossibletopurchaseaPowerSwitchTail2—SparkFunhasanexcellenttutorialonbuildingacontrollableACpoweroutlet(https://www.sparkfun.com/tutorials/119).
3. Inthisexample,weassumedthatthelightswillbeturnedonbetweentheselectedtimeslots.Itisalsopossibletoturnonthelightsbydeterminingthesunsettime.NOAAprovidesinformationoncalculatingsunsettimes,whichisavailableathttp://www.esrl.noaa.gov/gmd/grad/solcalc/calcdetails.html.
4. Anotheralternativetoturning/offlightingappliances—itwouldbeagreatideatomakecoffeeeverydayusingPowerSwitchTail2.Ifthecoffeemakerisfilledwithwaterandthecoffeepods/filterarereplaced,thecoffeemakerwillbeturnedonatthechosentime!Wewillhaveourcoffeereadyrightaftergettingoutofbed.
NotePowerSwitchTail2isdesignedforresistiveloadsandespeciallyforlimiteduse.Donottrytouseitwithheavyinductiveloadssuchasamotor.Thistoolisstrictlyrecommendedforthosewhoareknowledgeablewiththefundamentalsofelectricalengineering.


AcustomarywebserverexampleAnyhomeautomationprojectusingRaspberryPiyieldsalotofexamplesthatinvolvesbuildingawebserverthatcontrolsapplianceswithinalocalnetworkthattakescareofsecuringtheplaceusingelectromechanicallocks.WewillbuildasimplewebserverthatcanbeusedtoturnoffanLEDfromawebpage.ThisconceptcanbeexpandedtocontrolmultipleappliancesandreadsensordatafromtheGPIOinterfaceofRaspberryPi.
NoteThistaskismeantforabsolutebeginnerswhoarenotfamiliarwithPythonwebframeworktools.WearediscussingthisexampleconsideringsomereadersmightjumprighttoProject11,HomeAutomationUsingRaspberryPi.

PrepareforliftoffWewillbebuildingawebserverusingaFlaskframework(http://flask.pocoo.org/).TheFlaskframeworkcanbeinstalledasfollows:
sudoapt-getinstallpython-pip
sudopipinstallFlask

Engagethrusters1. Thefirstpartissettingupthelandingpage.Whenauserenterstheaddressofthe
webserver,thewebpagewouldbesomethinglikewhatisshowninthefollowingscreenshot.TheHTMLpageconsistsofasinglebuttoncalledSampleButton.
Aflaskframework-basedwebserver
2. Whenabuttonisclicked,theincomingPOSTrequestisusedtoswitchthestatesoftheLEDfromONtoOFFandviceversa:
@app.route('/',methods=['POST'])
defrecord():
#recordallthedatafromtheform
globalstate
ifstate==False:
state=True
else:
state=False
GPIO.output(25,state)
returnrender_template('form_submit.html')
3. ThewebservercanbelaunchedfromtheIPaddressofRaspberryPi.Thewebpageshouldbeaccessiblefromhttp://192.168.1.76:75:
#Runtheapp:)
if__name__=='__main__':
app.run(
host="0.0.0.0",
port=int("75")
)\
Thewebserverexampleisavailablealongwiththisproject.Checkthisbook’swebsiteformoreexamples.

Objectivecomplete–minidebriefingUsingthesimpleconceptexplainedearlier,itispossibletocontrolanyappliance(byinterfacingsomecontroldevicesuchasthepowerswitchtailtoRaspberryPi’sGPIOpins).Itisalsopossibletoreadsensorstatesaswellastrackanyspecialinformation.Forexample,itispossibletotrackthestatusofapackagethatisexpectedtobedelivered.USPSprovidesstatusofshipmentsthatcanbedisplayedonthewebpage(formoreinformationonAPIs,checkouthttps://www.usps.com/business/web-tools-apis/welcome.htm).
Inalltheseexamples,wereviewedcontrolappliancesusingRaspberryPiwithinalocalnetwork.Inthelatertaskofthisproject,wewillreviewcontrollingthedevicefromanywhereovertheInternet.


Turningonalawnsprinkleronlywhenthereisnorainforecast!ThisexamplewasinspiredbyacommentonanarticlerelatedtoHomeAutomationusingRaspberryPi.Thecommentermentioned:
TheonlyhomeautomationthatI’minterestedin(andstillhaven’tseen)issomethingthat’llturnoffmylawnsprinklersifit’srainedacertainamountintheprecedingdaysorifit’srainingonthedaythatthesprinklersareprogrammedtogoon.
Wedecidedtowhipupaquickexamplethatwouldturnonthesprinklerwhenitisnotgoingtorainonaparticularday.

PrepareforliftoffInordertochecktheweatherforecast,weneedtomakethepython-weather-apilibrary(thelibraryisdistributedwithMITlicense).WewillmakeuseoftheNOAAAPI.Thelibrarycanbedownloadedusingthewgetcommand:
wgethttps://launchpad.net/python-weather-api/trunk/0.3.8/+download/pywapi-
0.3.8.tar.gz
Thesourcefilesareavailableinacompressedfolder.Thecontentsofthecompressedfilecanbeextractedasfollows:
tar–xvzfpywapi-0.3.8.tar.gz
Onceextracted,thelibrarycanbeinstalledasfollows:
pythonsetup.pybuild
sudopythonsetup.pyinstall
WealsoneedaflowcontrolvalvesimilartothisonesoldonSparkFunavailableathttps://www.sparkfun.com/products/10456.

Engagethrusters1. NOAA(http://www.weather.gov/)providesweatherdatageneratedfromtheweather
stationssituatedindifferentcities.Eachcity’sweatherstationhasauniquefour-lettercode.Forexample,Chicago,Illinois’codeisKORD.Wewillmakeuseofthisfour-lettercodetoretrievetheweatherforecastforacity.
2. Theweatherdataisretrievedusingthepywapilibraryasfollows:
defmain():
pp=pprint.PrettyPrinter(indent=4)
whileTrue:
result=pywapi.get_weather_from_noaa('KORD')
pp.pprint(result['weather'])
sleep(10)
3. Wewillturnonthesprinkleronlyiftheweatherforecast(availableundertheweatherkeyword)isanythingotherthanRain,LightRain,orThunderstorm:
if(result['weather']!='LightRain'or
result['weather']!='Rain'or
result['weather']!='Thunderstorm'):
GPIO.output(25,GPIO.HIGH)
4. Thesprinklercanbeturnedonusingatransistorswitchingcircuitandarelay.(Ifyouarenotfamiliarwithtransistorswitchingcircuitandrelays,Project4,ChristmasLightSequencerprovidesinformationaboutatransistorswitchingcircuitinextensivedetail).
5. Ithasnotbeendemonstratedherebutthepywapimoduleneedstobeusedinconjunctionwiththedatetimemoduletoturnonthesprinkleratselectedtimesofday.

Objectivecomplete–minidebriefingIfitisnotpossibletointerfacethesolenoidvalvedirectlytoRaspberryPi,asthesolenoidvalvecanonlybeinterfacedtoanArduinoandcontrolledusingthepython-twistedframework.
InstatessuchasCaliforniawheretherearesometimesseveredroughts,itiscommonpracticetosavewaterfromdrainpipesusingbarrels.Thepywapimodulecanbeusedtoreplacethebarrelsifthereisanupcomingrainforecast.

GainingremoteaccesstoyourRaspberryPitocontrolappliancesItispossibletoremotelylogintoRaspberryPiusingSSH(SecureShell).AnorganizationcalledWeaved(http://www.weaved.com/)providesthecapabilitiestologin.
Thetutorialavailablefromhttps://www.juicypi.io/access-your-raspberry-pi-anywhere-in-the-world-using-weaved/providesdetailedinstructionstoinstalltherequisitetools.
ThisenablesyoutocontrolthedevicesinterfacedtoRaspberryPi.

SomeprojectideastoconsiderInhouseswithlonghallways,itisnotalwayspossibletohearthedoorbellringfromthefarendofthehouse.Itispossibletoplaceaforcesensitiveresistor(https://www.sparkfun.com/products/9375)totrackanyvisitorstothehouse.Likewise,itispossibletotrackpackagesleftonthedoormat.InProject6,RaspberryPiasaPersonalAssistant(thepersonalassistantproject),webuiltasmallenclosuretokeeptrackofkeysusingareedswitch.Asimilarconceptcanbeusedtotrackitemsusingareedswitch.ThereisawirelessprotocolcalledZ-Wavethatwasspecificallydesignedforhomeautomationpurposes.RaspberryPicanbeturnedintoacontrolcentretowirelesslycontrolappliancesusingtheZ-Wavemodules.Raspberrycompatiblemodulesareavailableforsaleathttp://razberry.z-wave.me/(checkoutthisbook’ssiteforsomeexamples).InProject5,InternetofThingsExample–AnE-mailAlertWaterFountain,webuiltawebserverthatcansetcolorsoftheRGBLEDstrip.TherearesomeinterestingideastodecorateourhomeswiththeseRGBLEDstrips(http://www.usledsupply.com/shop/install/project-photos-and-ideas.html).GEApplianceshascomeupwithaninterestingdevelopmenttoolthatcanbeusedtocontrolproductsfromGE.ThistoolincombinationwithRaspberryPi(runningTwistedserver)canbeusedtocontrolGEproductsinsomeone’shome.Inthefuture,allGEapplianceswillbecapableofbeingconnectedtoasmartdevicesnetwork.


MissionaccomplishedInthisproject,welookedintodifferentsolutionsthatcanbeimplementedusingRaspberryPioveraweekend.Wereviewedsomebasicexamplesthatcanbepossiblytweakedtoturnahomeintoasmartone.


Chapter12.UsingaRaspberryPiforScienceandEducationInthisproject,wewillreviewsomeexamplesofhowtheRaspberryPicanbeusedtoeducateourselves.WewillreviewexamplesofhowtousetheRaspberryPiforself-improvementoreducatingchildreninthefieldofscience.

MissionbriefingInthisproject,wewillreviewsomeexamplestodemonstratehowtheRaspberryPicanbeusedtoeducateourselvesforself-improvementordemonstrateasimplephysicsexperiment.

Whyisitawesome?ThePi,asyouhaveseeninthelastfewprojects,offersyouimmensefunctionality,andwasbasicallydesignedtoencouragelearningcomputerscienceatanaffordablecost.Aswehaveseen,thepossibilitiesofbuildinggadgetsusingtheRaspberryPiareendless,makingthisanawesomesegueintoself-improvementandscience.

YourHotshotobjectivesInthisproject,wewilldiscussthefollowingexamples:
ImprovingyourvocabularyusingtheRaspberryPiRaspberryPiandKhanAcademyBuildingasciencefairexhibitusingtheRaspberryPi


ImprovingyourvocabularyusingtheRaspberryPiAsanexampleofself-improvementusingtheRaspberryPi,wewillimplementanexamplethatretrievesthewordofthedayusingtheWordnikAPI(https://www.wordnik.com/).

PrepareforliftoffWeneedtoinstalltheWordnikPythonclient(distributedundertheApacheLicense)availableasaPythonpackage:
sudopipinstallwordnik
ThenextstepistoobtainanAPIkeytomakeuseoftheAPI.ThiscanbeobtainedbyregisteringforanaccountwithWordnikandrequestinganAPIkey(http://developer.wordnik.com/).
Oncetheinstallationiscomplete,itistimetoreviewtheexample.
NoteTheWordnikAPIismerelybeingdemonstratedasanexample.RefertotheAPItermsofagreementtodeterminehowtheAPIcanbeusedinacommercialapplication.

Engagethrusters1. Let’sreviewanexamplethatfetchesthewordofthedayusingtheWordnikAPI.The
firststepistoimporttheWordnikPythonclient:
fromwordnikimport*
2. ThenextstepistocreateaclientthatinitializestheAPItoaccessthewordlist:
url='http://api.wordnik.com/v4'
key='APIKey'
client=swagger.ApiClient(key,url)
3. ThenextstepistoinitializetheWordnikAPIandretrievethewordoftheday:
words=WordsApi.WordsApi(client)
example=words.getWordOfTheDay()
4. ThereturnedobjectisaWordOfTheDayobject(https://github.com/wordnik/wordnik-python/blob/master/wordnik/models/WordOfTheDay.py).Let’sprinttheword,definition,andthepublisheddate:
string='TheWordoftheDayis'+example.word+'.'
printstring
string='Definition:'+example.definitions[0].text
printstring
string='Date='+example.publishDate.strftime("%D")
printstring
5. TheoutputofthisPythonscriptissomethingliketheoneshownhere:
TheWordoftheDayisasportation.
Definition:Thefeloniousremovalofgoodsfromtheplacewherethey
weredeposited.
Date=01/19/15
6. Now,thiswordofthedaycanbedisplayedonascreenatsomeprominentlocationusingaGUItoolsuchasTkinter(http://zetcode.com/gui/tkinter/)andupdatedevery24hours.Refertothisbook’swebsiteforsomeideas.

Objectivecomplete–minidebriefingInthistask,wereviewedanexampleofhowtouseyourRaspberryPiforself-improvement;similarly,thereareAPIsfromothersourcesthatprovideaquoteoftheday,jokeoftheday,andsoon.


RaspberryPiandKhanAcademyInthistask,wewillreviewanexamplethatenablesworkingonmathexercisesfromKhanAcademy(https://www.khanacademy.org/).KhanAcademyisanon-profiteducationalorganizationthatprovidesfreelearningresourcesforvarioussubjects,includingmathandcomputerscience.Inthisexample,wewillhostasimplewebserveronaRaspberryPithathoststheexercisesfromKhanAcademylocally.Thisenablescustomizationofthelearningtoolstotheuser’sneeds.Forexample,itcanbehostedonanetworkthatisnotconnectedtotheInternetandwecancustomizecontentfromKhanAcademytohelpsomeoneimproveontheirmathskills.
ThefirststepistoclonetherepositoryonaRaspberry
gitclonehttps://github.com/Khan/khan-exercises
Oncetherepositoryiscloned,itistimetolaunchthewebserver!
NoteTheexercisesaredistributedunderanon-commerciallicensewhilethewebserverframeworkisdistributedunderanMITlicense.YoumustbeawareofthelicenseagreementswhentryingtomakeuseofresourcesfromKhanAcademy.
Thelaunchoftheserverinvolvesasinglestep.Afterswitchingtothekhan-exercisesdirectory,thewebservercanbelaunchedasfollows:
python–mSimpleHTTPServer
ThewebservercanbeaccessedonalocalnetworkbyusingyourRaspberryPi’sIPaddressfromabrowserusinghttp://192.168.1.98:8000/khan-exercises/exercises/.
ThefollowingisascreenshotofthewebserverhostedonaRaspberryPi:

KhanAcademyexercisesonalocalserver

SomeideastoconsiderWeusethiswebservertosolvepuzzlesusingtheRaspberryPi.Itcanbeusefultosharpenyourmentalacuitywhilekillingtime.


BuildingasciencefairexhibitusingtheRaspberryPiInthistask,wewillbuildasimplephysicsexperimentcontrolledbytheRaspberryPi.Thiscanbeusedtoexplainhowthingssuchasasolarpanel,windmill,andsoonwork.Inthisexample,wewillbuildawindmillexperimentthatcanpossiblybeusedasademonstrativeexhibitatasciencefair.

PrepareforliftoffWeneedawindmillgeneratorkitfromahobbystore(forexample,http://amzn.com/B0016PBH9Q).ThekitneedstobeputtogetherleavingtheleadsoftheDCmotorexposed.

Engagethrusters1. TheDCmotorofthewindenergykitneedstobeinterfacedtotheRaspberryPi
GPIOpinasshowninthefollowingFritzingschematic:
AFritzingschematicshowingtheinterfaceofaDCmotorandabuttonforcontrol
2. SincetheDCmotorisinterfacedtoyourRaspberryPi’sGPIO#18,itcanbeturnedon(wearemakinguseoftheRPi.GPIOlibraries;refertopreviousprojectsifyouarenotfamiliarwithRPi.GPIO):
importRPi.GPIOasGPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(18,GPIO.OUT)
GPIO.output(25,GPIO.HIGH)
3. Whenavisitorattheexhibitionwouldliketoknowhowawindmillworks,aninstructionalaudiorecording(thedownloadavailablewiththisprojectmerelyplaysatestMP3file)canbeplayedatthepressofabuttonasfollows:
defmy_callback(channel):
os.system('mpg321recording.mp3&')
GPIO.add_event_detect(25,GPIO.FALLING,callback=my_callback)
4. ThefollowingimageshowsawindmillgeneratorkitinterfacedtoaRaspberryPi:

Awindmillgeneratorkit

Objectivecomplete–minidebriefingYourRaspberryPicanalsobeusedtobuildsomethingthatteststheskillsofpeopleatasciencefairortoprovideentertainment(raffledraw,puzzle,andsoon).

SomesimpleeducationalexperimentsusingtheRaspberryPi1. Asoftwaretoolthatalertswhentheinternationalspacestationfliesbyyourvicinity
canbefoundathttp://issabove.com/iss-above-and-the-raspberry-pi/.2. AcollectionofscientificexperimentarticlesusingtheRaspberryPicanbefoundat
http://www.raspberrypi.org/the-raspberry-pi-in-scientific-research/.3. ScratchisagraphicalprogrammingtooldevelopedbyMITtomotivatechildrento
getstartedwithlearningtoprogram.Scratchcanbefoundathttp://www.raspberrypi.org/tag/scratch/.


HotshotchallengeIsitpossibletobuildareceptionistrobotliketheoneshownatthefollowinglinkusingtheRaspberryPi?Refertohttp://roboceptionist.org/project.htmformoreinformation.


Chapter13.TipsandTricksInthisproject,wewilldiscusstipsandtrickstoovercomeanyproblemsonemightencounterwithRaspberryPi.Wealsoprovideprojectideas,generalinformation,andadissectionoftheRaspberryPiitself.

MissionbriefingInthisbook,wediscusseddifferentprojects,spanningdifferentdifficultylevels.Beforewrappingupthisbook,wewouldliketoshareourexperienceaboutthechallengesweencounteredandsharesometipsandresourcestoovercomesituationsthatyoumightencounterandpossiblesolutionsforthem.Wewillalsodiscusspossibleprojectideasthatyoucantrytoimplementoveraweekend.Wewillgointoeachaspectbriefly.

Whyisitawesome?Thisprojectsharestipsandtricks,providesprojectideas,anddiscussessolutionstoproblemsgenerallyencounteredinDIYprojects.

YourobjectivesInthisproject,wewilldiscussthefollowing:
SettingupRaspberryPiasadevelopmentplatformProjectideasthatcanbeimplementedoveraweekendRemotelyloggingintoRaspberryPifromanywhereontheInternetProblemsthatmightbeencounteredwhileusingRaspberryPiCooladd-onhardwaresourcesdevelopedfortheRaspberryPiplatformUsefulresourcesforRaspberryPi

MissionchecklistHaveyourcuriosity,attentionandpassionattheready.


SettingupRaspberryPiasadevelopmentplatformRaspberryPiiscurrentlythemostbasic,idealhardwareenvironmenttogetstartedwithlearningtocodeinaparticularlanguageoradvancedsystemsdevelopment.

#1–SimpletrickforPythondevelopmentviaremoteloginWhilewritingthisbook,wefounditconvenienttowritePythonscriptsonourlaptop/desktop,copythemovertoRaspberryPi,andtestthemviaremotelogin.ThiswasespeciallyusefulwhenwehadRaspberryPicontrollinginterfacedtotoolsonaChristmastree.ItisdifficulttosetupamonitorandkeyboardforRaspberryPiandworkfromthere.
WeusedWinSCP(http://winscp.net/eng/index.php—sincewewereusingalaptoprunningWindows)totransferfilesfromthelaptoptoRaspberryPi.Then,weusedthePuTTYSSHclient(http://www.putty.org/)foraremotelogintoRaspberryPiandtestedthescripts:
InordertoremotelylogintoRaspberryPiortransferfilesusingWinSCP,OpenSSHisrequired.TheRaspbianWheezyimagecomeswithSSHinstalledandenabledbydefault.Let’sloginafterdownloadingandinstallingWinSCP.Theusernamewouldbepiandthepasswordraspberry(unlessyou’vechangedthedefaultpassword).
TheWinSCPloginwindow
ThenextstepisittolocatethefilestobetransferredonthelocalmachineaswellasidentifyingthefolderwherethefilesneedtobecopiedtoRaspberryPi.Thefilesonthelocalmachinearelocatedontheleft-handside,whilethefilesonRaspberryPiarelocatedontheright-handsideofthewindow.

TransferringfilesusingWinSCP
Oncethefilesaretransferred,wecanmakeuseofPuTTYforremotelogintoRaspberryPi.Asshowninthefollowingfigure,wecanconnecttotheRaspberryPiusingtheIPaddressofRaspberryPiandloginusingthecredentialsprovidedearlier.

ConnectingtoRaspberryPiusingPuTTY

#2WebdevelopmentusingGoogleCoderGooglereleasedanopensourcetoolbasedontheRaspberryPiplatformcalledCoder(http://googlecreativelab.github.io/coder/).WemadeuseoftheGoogleCodertoolinProject9,TheRaspberryPi-enabledPet/WildlifeMonitor.GoogleCoderisanopensourcetooltolearnwebdevelopment,butitsusehasexpandedandasanopensourcetool,itisreadyforyourprojectsastheneedarises.Forexample,itispossibletobuildawebinterfacetoread/writetotheGPIOinterfaceofRaspberryPi(forexample,http://googlecreativelab.github.io/coder-projects/projects/blinky_lights/).

#3AdafruitOccidentalisAdafruitIndustriesreleasedaversionofRaspbian,Occidentalisthatenabledeasierhardwaredevelopmentasitfeatureddriversforallstandardcommunicationprotocols.AdafruitIndustriesalsoreleasedaweb-baseddevelopmenttoolthatcomeswithseveralPythonexamples.

#4JavaDevelopmentusingtheRaspberryPiOraclehasreleasedatutorialsetthatteachesJavadevelopmentusingRaspberryPi.ThisincludestutorialsoninterfacepressuresensorsandwritingJavacodetoreadbarometricpressuredatafromthesensorviatheI2Cinterface.

#5TheThingboxprojectTheThingBoxProject(http://thethingbox.io/)isatoolthatallowsyoutoenableprojectsthatarerelatedtotheInternetofThingsonRaspberryPi.ItisasetoftoolsthatallowsyoutointerfacesensorsandappliancestotheInternet,availableasanOSimagethatcanbeflashedontoanSDcardandrunonRaspberryPi.OneofthetoolsavailablewiththeThingBoxProjectisNode-RED(http://nodered.org).TheNode-REDtool(showninfollowingscreenshot),infact,isagraphicalinterfacetoolthateliminatestheneedforyoutoprogramtocontrolthedevicesconnectedtoyourPi.Asthenamesuggests,anyapplicationisbuiltusingnodesandthecontrolflowisshownbyconnectedwires.
AHelloworldprojectusingNode-RED


RemotelyloggingintheRaspberryPifromanywhereontheInternetAcompanycalledWeaved(http://www.weaved.com/)hasreleasedatoolthatisstillunderbetatestingwhilewritingthisbook.ItenablesyoutoremotelylogintoRaspberryPithatisconnectedtotheInternetfromanywhereontheWeb(apartfromalocalnetwork).Thereisalsoatutorialtoinstallandusethetool(https://www.juicypi.io/access-your-raspberry-pi-anywhere-in-the-world-using-weaved/).Thisenablesremotecontrol/datacollection.


ProblemsthatmightbeencounteredwhileusingRaspberryPiThefollowingaresomeproblemsweencounteredwhileweworkedonRaspberryPi.

SDcardcorruptionWeencounteredSDcardcorruptionswhileworkingwithRaspberryPi.Insomecases,wehadtodiscardtheSDcardbutinothercases,wewereabletorecovertheSDcardusingAdvancedPartitionScannerWizardandre-imagetheSDcard.
Sometimesthefailureoccursbecausethereisapowerfailurewhilethecardisstillbeingwrittento.Suchfailuresareunavoidableoverthelifeofyourprojects.HereareafewwaystoavoidSDcardcorruption:
PowerdownyourPiproperlyafteruseChargeyourbatterypacksandmakesurePihasaconstantpowersupplyatalltimes
BesuretobuygoodqualitySDcardsandaswitheverythingelsedigital,havebackups.

PowerissuesWeencounteredissuesrelatedtothepowerdrawofRaspberryPi.Wehadlittlesuccesswiththingssuchasabatterypack(wewereabletogetitworkingusinga2700mAhbatterypack).Asyoumaybeaware,RaspberryPineedsa1A,5VUSBpowersupply.

DevicespoweredbyUSBSomedevicessuchasawebcamcannotbeconnecteddirectlytotheRaspberryPiandaUSBhubmaybenecessarytoconnectsuchdevices.


Cooladd-onhardwaresourcesdevelopedfortheRaspberryPiplatformThereareseveralproductsandadd-onhardwaredevelopedspecificallyforRaspberryPi.MostofthemaredesignedspecificallyforRaspberryPi.SomeofthemareavailablethroughDIYproductsellerssuchasSparkfunandAdafruitIndustries.MostproductsaredevelopedthroughcrowdfundingsitessuchasKickstarterandIndiegogo.Wemadeourbestefforttointroduceanewpieceofhardwareineachproject.Asimplewebsearchshouldpopupanewproductforaspecificapplication.

TheRaspberryPimodelBversusB+,modelAversusA+TheRaspberryPimodelA+andB+hasmoreGPIOpinsthanthemodelAandB.ThemodelB+hastwomoreUSBportswhilemodelA+consumeslesspowerthanthemodelA.Hence,itispossibleuseapoweroverEthernetmodule(PoE).Checkouthttp://www.silvertel.com/component/content/article/22-latest-news/304-raspberry-pi-poe.htmlformoreinformation.
IfyouownaRaspberryPiB+butthehardwareyouowniscompatiblewithRaspberryPimodelB,youcanmakeuseofa40pinto26pinadapteravailablefromAdafruitIndustries(https://www.adafruit.com/products/1986).


ProjectideasthatcanbeimplementedoveraweekendBesideswhatyouhaveseensofarinthisbook,thereareseveralcoolprojectsthatcanbeimplementedinaweekorless.Theseincludethefollowing:
AsmartalarmclockbasedonRaspberryPi,withfeaturessuchascustomalarmsounds,period,snoozeoptions,theabilitytoreportweatherconditions,alertyouabouttoday’sto-dolist,andmuchmore.Homeautomationandhomesurveillancesystems,acamerathatworksonmotion,VOCalarms,moodlighting,lightingcontrols,andsoon.Asensornetwork,wiredorwireless,tomonitorvariousparametersaroundyourhouse—temperature,plants,pets,andothers.Adigitalphotoframenetworkthatchangesimagesacrossmanyframes,dependingonthetimeofthedayandsoon.SeasonalprojectssuchaslightsforDiwali,Hanukah,orChristmas.


UsefulresourcesfortheRaspberryPiInthissection,wewilldiscussusefulresourcesthatareavailableforRaspberryPi.Whilethisbookcancovereveryaspectoftheprojectsdevelopedinthisbook,wewilldefinitelyrunintotrouble.Let’slookatsomeusercommunitiesthatcantrytoaddressourproblem.

RaspberryPiFoundation’sforums:TheRaspberryPiFoundation(http://www.raspberrypi.org/forums/)hasmaintainedaforumsinceitsinception.Thisforumprovidesanswerstoavastspectrumofquestionsthatyoumayhave.ItalsooffersanopportunitytodirectlyinteractwiththecreatorsofRaspberryPi.

RaspberryPiStackExchange:Atthetimeofwritingthisbook,theRaspberryPiStackExchange(http://raspberrypi.stackexchange.com/)wasinthepublicbetatestingmode.Ifthissitepassesthebetatestingphase,itshouldalsocontainapoolofusefulresources.

Element14’sRaspberryPicommunity:TheElement14website(http://www.element14.com/community/community/raspberry-pi)hostsaseriesofblogpostsfromRaspberryPiuserswhohavebuiltanecosystemofgadgetssurroundingRaspberryPi.ThecommunitywebpagehostscontestsregularlyinordertoexhibitthetalentofRaspberryPienthusiastsandDIYhobbyists.Thecommunitywebpagealsohasauserforumtoexchangeinformation,askquestionsrelatedtoorderstatus,andsoon.


MissionaccomplishedInthisproject,wediscussedcertainprojectideas,tips,andtricksandproblemsyoumightencounterwhileworkingonaprojectusingRaspberryPi.Theauthorssincerelyhopethatyouhaveenjoyedthisbook.

IndexA
AdafruitCobblerabout/PythondevelopmentontheWebIDE
AdafruitIndustriesURL/Prepareforliftoff,TheRaspberryPimodelBversusB+,modelAversusA+
AdafruitOccidentalisabout/#3AdafruitOccidentalis
AdafruitWebIDEOccidentalis/Whyisitawesome?
AdvancedIPScannerURL/SetupofaremoteloginintotheRaspberryPi
AI,ConnectFourgameabout/AbriefdescriptionoftheConnectFourGameAI,Engagethrustersmaingameloop/Maingameloop
AMP(AsynchronousMessagingProtocol)URL/Installingandtestingthepython-twistedframework
Arduinoabout/Whyisitawesome?distributors/WherecanyoubuyanArduino?programming,withRaspberryPi/ProgrammingtheArduinousingtheRaspberryPi,Engagethrusters
Arduinoacknowledgement,forcontrollingsignalcontrolflow,forweatherclock/Controlflowfortheweatherclocktemperaturedata/TemperaturedataRGBLEDstripcontrol/ControloftheRGBLEDstripsteppermotorcontrol/Controlofstepperviaserialportweatherforecastposition,programming/Programmingtheweatherforecastposition8x8matrixcontrol/8x8matrixcontrolBlinkMcontrol/BlinkMcontrol
ArduinoEthernetBoardURL/Missionchecklist
ArduinoEthernetboardURL/Missionchecklist
ArduinoIDEinstalling/InstallingtheArduinoIDE,Objectivecomplete–minidebriefing
ArduinoRaspberryPiinterfaceprojectabout/Missionbriefingfeatures/Whyisitawesome?objectives/YourHotshotobjectives

checklist/MissionchecklistArduinoIDE,installing/InstallingtheArduinoIDE,Objectivecomplete–minidebriefingArduino,programmingwithRaspberryPi/ProgrammingtheArduinousingtheRaspberryPi,EngagethrustersRaspberryPiAlaMode/RaspberryPiAlaMode,EngagethrustersWeasleyWeatherClock/TheWeasleyweatherclock,Engagethrusters,Objectivecomplete–minidebriefingsteppermotor,controllingwithArduino/ControllingthestepperusingtheArduino,Prepareforliftoff,EngagethrustersRGBLEDstrip,controllingwithArduino/ControllingtheRGBLEDStripusingtheArduino,Prepareforliftoff,EngagethrustersI2Ccommunication,Arduinoused/I2CCommunicationusingtheArduino(optional)serialportcommunication,withRaspberryPi/SerialportcommunicationwiththeRaspberryPi
ArduinoUnoplusESP8266boardURL/Missionchecklist
Atmelseries/Whyisitawesome?audiodevice
interfacing/InterfaceofanaudiodeviceAutodeskInventor/Prepareforliftoff

B8BitCircusMusic
URL/AddingsoundstothegameBarScrollexample/PrepareforliftoffBCMGPIOmode
URL/Engagethrustersbirdfeeder
settingup,withmotionsensor/Prepareforliftoff,Engagethrusters,Objectivecomplete–minidebriefingrequisites/Prepareforliftoff
BlinkM/IntroductiontothePiCrust–aprototypingplatformfortheRaspberryPiabout/TestanddebuggingexamplesusingtheWebIDEURL,fordatasheet/Engagethrusters
BonjourPrintServicesdriversURL/SetupofaremoteloginintotheRaspberryPi

Ccannyedgedetectiontechnique
about/Engagethrusterschassis
designing/Designingthechassisforthelinefollowingrobot,EngagethrustersChristmaslightsequencerproject
about/Missionbriefingfeatures/Whyisitawesome?objectives/Yourobjectiveschecklist/Missionchecklistdecorativeappliances,interfacing/InterfacethedevicestotheRaspberryPi,PrepareforliftoffdigitallyaddressableRGBmatrix,settingup/SettingupthedigitallyaddressableRGBmatrix,Prepareforliftoff,AnArduino-basedcontrolaudiodevice,interfacing/Interfaceofanaudiodevicewebserver,installing/Installingthewebserver,Engagethrusterswebserver,interfacing/Interfacingthewebserver,Engagethrusters,Objectivecomplete–minidebriefing
circadianlightingprojectURL/Engagethrusters
CisecoPi-Litegithubrepository/PrepareforliftoffCMake
about/Missionchecklistcommand-lineinterface-basedapproach
about/Acommand-lineinterface-basedapproachSDcardmountpoint,identifying/IdentifyingtheSDcardmountpointSDcard,unmounting/UnmounttheSDcardSDcard,flashing/FlashtheSDcard
components,RaspberryPiabout/FeaturesofaRaspberryPi
ConnectFourdesktopgameabout/Missionbriefingreferencelink/Missionbriefingfeatures/Whyisitawesome?objectives/Yourobjectiveschecklist/MissionchecklistHelloworldexample,withpygame/HelloworldexamplewiththepygameUI/GettingstartedwiththeConnectFourgame(UIandsoundeffects),EngageThrustersgameinputs,interfacingwithPiFacemodule/InterfacinggameinputsusingthePiFacemodule,Prepareforliftoff,EngagethrustersAI/AbriefdescriptionoftheConnectFourGameAImarqueecontrol/Marqueedesignandcontrol(optional)

switches,settingupwithcardboardbox/Setupoftheswitchesusingacardboardbox

Ddatainterpretation,linefollowingrobot/EngagethrustersDCmotor
controlling,withH-Bridge/Prepareforliftoffdevices
interfacing,toRaspberryPi/InterfacethedevicestotheRaspberryPi,Prepareforliftoff,Engagethrusters
digitallyaddressableRGBmatrixsettingup/SettingupthedigitallyaddressableRGBmatrix,Prepareforliftoffworking/Howdoesitwork?
DinghitsURL/Addingsoundstothegame
dishmonitorassembling/Settinguptheassemblyforthedishmonitor,Engagethrusters,Objectivecomplete–minidebriefing
DIYtabletopfountainkitrequistes/Prepareforliftoffabout/Engagethrusters
Ee-mailalerts
settingup,infountain/Setupofthee-mailalertsinthefountain,Engagethrusters
e-mailfeedparsersettingup/Settingupthee-mailfeedparser,Engagethrusters,Settingupane-mailfeedparsertorefillaprescriptionaswellasremindtheuseraboutanupcomingdoctor’sappointment,Engagethrusterssettingup,forreminders/Settinguptheparserforremindersandevents,Engagethrusterssettingup,forevents/Settinguptheparserforremindersandevents,Engagethrustersdoctorappointmentsreminder,settingup/Settingupareminderfordoctor’sappointments
electricaltapeused,forbuildingtrack/Useelectricaltapeandbuildatrack
Element14URL/Element14’sRaspberryPicommunity:about/Element14’sRaspberryPicommunity:
enclosuredesign,personalassistantURL/Prepareforliftoff

FFlaskframework
installing/InstallationoftheFlaskframework,Engagethrusters,Prepareforliftoff,EngagethrustersURL/Prepareforliftoff
FlaskframeworkexampleURL/Engagethrusters
FreeSoundsURL/Addingsoundstothegame

Ggameinputs,ConnectFourdesktopgame
interfacing/InterfacinggameinputsusingthePiFacemodule,Prepareforliftoff,Engagethrusters
GoogleCoderabout/InstallingandtestingtheGoogleCoderprojectontheRaspberryPiURL/Prepareforliftoff,#2WebdevelopmentusingGoogleCodersettingup/Engagethrustersused,forwebdevelopment/#2WebdevelopmentusingGoogleCoder
GPIOsettingup/Missionbriefing,SettinguptheGPIO,Engagethrustersfeatures/Whyisitawesome?objectives/YourHotshotobjectiveschecklist/Missionchecklistrequisites/Huntingandgatheringlibraries,installing/InstallingGPIOlibrarieslibraryinstallation,verifying/GPIOprogrammingusingPython

HHelloworldexample,ConnectFourdesktopgame
about/Helloworldexamplewiththepygamepygamemodule,features/Prepareforliftoffpygamemodule,using/Engagethrusterssounds,playingwithpygamemodule/Playingsoundsusingthepygamemodulemenus,buildingwithpygamemodule/Buildingmenususingthepygamemodule,Objectivecomplete–minidebriefing
homeautomationprojectabout/Missionbriefingfeatures/Whyisitawesome?objectives/Yourobjectiveschecklist/Missionchecklistlight,turningon/Asimpleexamplethatcontrolslimitedindoorandoutdoorlightingintheevening,Prepareforliftoffcustomarywebserverexample/Acustomarywebserverexample,Engagethrusters,Objectivecomplete–minidebriefinglawnsprinkler,turningon/Turningonalawnsprinkleronlywhenthereisnorainforecast!,Engagethrustersremoteaccess,enablingforcontrollingappliances/GainingremoteaccesstoyourRaspberryPitocontrolappliancesconsiderations/Someprojectideastoconsider
Houghtransformsabout/Engagethrusters

II2Ccommunication
about/Whyisitawesome?,I2CCommunicationusingtheArduino(optional)URL,fortutorials/Whyisitawesome?7-Segmentdisplay/The7-Segmentdisplay8x8LEDmatrix/8x8LEDmatrixBlinkM/BlinkMproximitysensor/Proximitysensor
ImageWriterpackage/GUI-basedapproachInfrared(IR)emitter/detector
about/Infraredemitter/detectorinfraredsensor
used,forimplementinglinefollowinglogic/Implementationoflinefollowinglogicbasedonsensordata,Engagethrusters
InstructablesURL/Whyisitawesome?
interfaceURL/Sensorselection,interface,anddatainterpretation
issues,RaspberryPiSDcardcorruption/SDcardcorruptionpowerissues/PowerissuesdevicespoweredbyUSB/DevicespoweredbyUSB

JJavadevelopment
RaspberryPiused/#4JavaDevelopmentusingtheRaspberryPi

Kkeyalertsystem
sensors,settingup/Settingupsensorsforthekeyalertsystem,Engagethrusters,Objectivecomplete–minidebriefing
KhanAcademyURL/RaspberryPiandKhanAcademy
KhanAcademyexampleabout/RaspberryPiandKhanAcademy

Llawnsprinkler
turningon/Turningonalawnsprinkleronlywhenthereisnorainforecast!,Prepareforliftoff
LEDblinkingexampleprogramming/Engagethrusterselectricalconnection/Electricaloutputofourprogram,Engagethrusters
LightDependentResistorsabout/LightDependentResistors
linefollowinglogicimplementing,withinfraredsensor/Implementationoflinefollowinglogicbasedonsensordata
linefollowingrobotabout/Missionbriefingfeatures/Whyisitawesome?objectives/YourHotshotobjectiveschecklist/Missionchecklistprerequisites/MissionchecklistPiPlate,assembling/AssemblyofthePiPlateforthelinefollowingrobotPiPlate,testing/AssemblyofthePiPlateforthelinefollowingrobotdatainterpretation/Sensorselection,interface,anddatainterpretationsensors,selecting/Engagethrustersinterface/EngagethrustersMachineVision-based/Machine-vision-basedlinefollowingrobotmotordrivercircuit,testing/Testingthemotordrivercircuittrack,preparing/Preparationofthelinefollowingcoursechassis,designing/Designingthechassisforthelinefollowingrobotassembling/Astep-by-stepassemblyoftherobotassembling,steps/Prepareforliftoff,Engagethrustersreferencelinks/References
linefollowingtrackpreparing,forrobot/Preparationofthelinefollowingcourse,Prepareforliftoff
LinuxSDcardwithRaspbianimage,flashing/Linux
LPD8806libraryURL/ControllingRGBLEDsfromawebpage

MMachineVision-basedlinefollowingrobot/Machine-vision-basedlinefollowingrobotMake*itBasicRoboticsStarterKit
URL/Missionchecklistmarqueecontrol,ConnectFourgame
implementing/Marqueedesignandcontrol(optional),Prepareforliftoffmenuclass
URL/Addingamenuforthegamemotordrivercircuit
testing/Testingthemotordrivercircuit,Prepareforliftoff,Engagethrustersmultipleappliances
connecting,toRaspberryPi/ConnectingmultipleappliancestotheRaspberryPi

NNOAA
URL/EngagethrustersNode-REDtool
URL/#5TheThingboxproject
OOccidentalis
about/Missionbriefingfeatures/Whyisitawesome?objectives/YourHotshotobjectivesinstalling/Installation,features,andusageoftheOccidentalisoperatingsystemfromAdafruit
Occidentalisdistrorequisites/Missionchecklist
OpenCVURL/MissionchecklistURL,forinstallationonRaspberryPi/MissionchecklistURL,forinstallationonLinux/Missionchecklist
OpenCVDishDetectorprojectURL/Settinguptheassemblyforthedishmonitor

PParallax/Prepareforliftoffpersonalassistant
building/Missionbriefingobjectives/Yourobjectiveschecklist/Missioncheckliste-mailfeedparser,settingup/Settingupthee-mailfeedparser,Engagethrusterse-mailfeedparser,settingupforreminders/Settinguptheparserforremindersandevents,Engagethrusterse-mailfeedparser,settingupforevents/Settinguptheparserforremindersandevents,Engagethrustersenclosure,designing/Designinganenclosuredesignforthepersonalassistant,Prepareforliftoff,Engagethrustersdishmonitor,assembling/Settinguptheassemblyforthedishmonitor,Engagethrusters,Objectivecomplete–minidebriefingsensors,settingupforkeyalertsystem/Settingupsensorsforthekeyalertsystem,Engagethrusters,Objectivecomplete–minidebriefingimplementation/Missionaccomplishedchallenges/Hotshotchallenges
personalhealthmonitorabout/Missionbriefingfeatures/Whyisitawesome?objectives/YourHotshotobjectiveschecklist/Missionchecklistwebserver,settingupforrecordinghealthparameters/Settingupawebservertorecordhealthparameters,Prepareforliftoffsimpleexercisetool,building/AsimpleexercisetoolusingtheRaspberryPi,Engagethrustersminiprojectidea/Aminiprojectideae-mailfeedparser,settingup/Settingupane-mailfeedparsertorefillaprescriptionaswellasremindtheuseraboutanupcomingdoctor’sappointment,Engagethrusterspillremindertool,building/Asimpletoolthatremindsapersontotakehis/herpills
pet/wildlifemonitorabout/Missionbriefingfeatures/Whyisitawesome?objectives/Yourobjectiveschecklist/Missionchecklistpython-twistedframework,installing/Engagethrusterspython-twistedframework,testing/Engagethrusterspython-twistedframework,using/Objectivecomplete–minidebriefing

SparkCore,settingup/SettingupandtestingSparkCoretointeractwithappliancesGoogleCoder,installing/InstallingandtestingtheGoogleCoderprojectontheRaspberryPibirdfeeder,settingup/Abriefoverviewofabirdfeederthattriggersacameraconsiderations/Alternativesandprojectideastoconsider
PiCrustabout/IntroductiontothePiCrust–aprototypingplatformfortheRaspberryPi
PiFaceusing/InterfacinggameinputsusingthePiFacemoduleinstallationguide,URL/Prepareforliftoff
PiFaceinterfaceboardURL/InterfacinggameinputsusingthePiFacemodule
PiLiteLEDMatrixdisplayURL/Marqueedesignandcontrol(optional),Prepareforliftoff
pillreminderbuilding/PrepareforliftoffURL/Prepareforliftoff
PiPlatetesting/AssemblyofthePiPlateforthelinefollowingrobot,Prepareforliftoff,Objectivecomplete–minidebriefingassembling/AssemblyofthePiPlateforthelinefollowingrobot,Engagethrusters,Objectivecomplete–minidebriefing
PIRsensorURL/Prepareforliftoff
Pololuabout/PrepareforliftoffURL/Useelectricaltapeandbuildatrack
powerDarlingtoncircuitURL/Engagethrusters
PowerSwitchTail2using/Prepareforliftoffsoftwareprerequisites/Softwareprerequisitessettingup/Engagethrusters
PowerSwitchTailII/InterfacethedevicestotheRaspberryPiprojectsideas
implementing,overweekend/Projectideasthatcanbeimplementedoveraweekend
Proportional-Integral-Derivativecontrol(PID)/Hotshotchallengepulse-widthmodulation
about/Whyisitawesome?URL,fortutorials/Whyisitawesome?
PuTTYSSHclientURL/#1–SimpletrickforPythondevelopmentviaremotelogin

python-twistedframeworkabout/Installingandtestingthepython-twistedframeworkinstalling/Engagethrusterstesting/Engagethrustersusing/Objectivecomplete–minidebriefing
python-twistedframeworkURL/Installingandtestingthepython-twistedframework
Pythondevelopmentviaremotelogin/#1–SimpletrickforPythondevelopmentviaremotelogin
Pythondevelopment,onWebIDEabout/PythondevelopmentontheWebIDE,PrepareforliftoffI2Cinterface/QuickintroductiontotheI2CinterfaceI2Cinterface,configuringonRaspberryPi/ConfiguringtheI2CinterfaceontheRaspberryPiI2Cinterface,configuringoonRaspberryPi/ConfiguringtheI2CinterfaceontheRaspberryPi,Engagethrusters
PythonIDLE3LEDblinkingexample,programming/Engagethrusters

Qquick2wirepythonAPI/InstallingGPIOlibraries

RRaspberryPi
about/AquickintroductiontotheRaspberryPi,SettingupRaspberryPiasadevelopmentplatformURL/FeaturesofaRaspberryPifeatures/FeaturesofaRaspberryPicomponents/FeaturesofaRaspberryPidistributors/WherecanIbuyaRaspberryPi?requisites/RequirementstogetstartedwiththeRaspberryPidisplay/RequirementstogetstartedwiththeRaspberryPipowersupply/RequirementstogetstartedwiththeRaspberryPioperatingsystems/OperatingsystemsontheRaspberryPisettingup/SettinguptheRaspberryPiGPIO/Missionbriefingremotelogin,settingup/SetupofaremoteloginintotheRaspberryPi,Prepareforliftoff,Engagethrusterstipsandtricksproject/Missionbriefingsettingup,asdevelopmentplatform/SettingupRaspberryPiasadevelopmentplatformremotelogin,enabling/RemotelyloggingintheRaspberryPifromanywhereontheInternetissues/ProblemsthatmightbeencounteredwhileusingRaspberryPiadd-onhardwaresources/Cooladd-onhardwaresourcesdevelopedfortheRaspberryPiplatformmodelB,versusB+/TheRaspberryPimodelBversusB+,modelAversusA+modelA,versusA+/TheRaspberryPimodelBversusB+,modelAversusA+usefulresources/UsefulresourcesfortheRaspberryPi
RaspberryPiAlaModeabout/Missionbriefing,RaspberryPiAlaModefeatures/Prepareforliftoff
RaspberryPieLinuxwikiURL/RequirementstogetstartedwiththeRaspberryPi
RaspberryPiFoundationforumsURL/RaspberryPiFoundation’sforums:about/RaspberryPiFoundation’sforums:
RaspberryPiStackExchangeabout/RaspberryPiStackExchange:URL/RaspberryPiStackExchange:
RaspberryPiWebIDEinstalling/InstallationoftheRaspberryPiWebIDE,EngagethrustersURL/InstallationoftheRaspberryPiWebIDEPythondevelopment/PythondevelopmentontheWebIDE,Prepareforliftoffexamples,testing/TestanddebuggingexamplesusingtheWebIDE,Preparefor

liftoff,Engagethrustersexamples,debugging/TestanddebuggingexamplesusingtheWebIDE,Prepareforliftoff,Engagethrusters
Raspbianabout/GettingstartedwithRaspbiandownloading/DownloadingRaspbianURL/DownloadingRaspbianimage,flashingonSDcard/FlashingimageontotheSDcard
Raspbianimageflashing,onSDcard/FlashingimageontotheSDcard
Raspbianwheezy/DownloadingRaspbianraspi-configtool
info/SettinguptheRaspberryPiexpand_rootfs/SettinguptheRaspberryPioverscan/SettinguptheRaspberryPiconfigure_keyboard/SettinguptheRaspberryPichange_pass/SettinguptheRaspberryPichange_locale/SettinguptheRaspberryPichange_timezone/SettinguptheRaspberryPimemory_split/SettinguptheRaspberryPioverclock/SettinguptheRaspberryPissh/SettinguptheRaspberryPiboot_behaviour/SettinguptheRaspberryPiupdate/SettinguptheRaspberryPi
remoteloginsettingup,inRaspberryPi/SetupofaremoteloginintotheRaspberryPi,Engagethrustersenabling/RemotelyloggingintheRaspberryPifromanywhereontheInternet
resources,RaspberryPiabout/UsefulresourcesfortheRaspberryPifoundationforums/RaspberryPiFoundation’sforums:StackExchange/RaspberryPiStackExchange:Element14/Element14’sRaspberryPicommunity:
RGBLEDscontrolling,fromwebpage/ControllingRGBLEDsfromawebpage,Engagethrusters
RGBLEDstripcontrolling,withArduino/ControllingtheRGBLEDStripusingtheArduino,Prepareforliftoff,Objectivecomplete–minidebriefinglightingup/LightinguptheRGBLEDstrip,AnArduino-basedcontrol

S7-segmentbackpack/Engagethrustersscienceandeducationproject
about/Missionbriefingfeatures/Whyisitawesome?objectives/YourHotshotobjectivesvocabulary,improving/ImprovingyourvocabularyusingtheRaspberryPi,EngagethrustersKhanAcademyexample/RaspberryPiandKhanAcademysciencefairexhibit,building/BuildingasciencefairexhibitusingtheRaspberryPi,Engagethrusters,Objectivecomplete–minidebriefingeducationalexperiments/SomesimpleeducationalexperimentsusingtheRaspberryPi
sciencefairexhibitbuilding/BuildingasciencefairexhibitusingtheRaspberryPi,Engagethrusters
ScribblerlinefollowingrobotURL/Engagethrusters
SDcard,withRaspbianimageflashing,onWindows/Windowsflashing,onLinux/Linux
SDcardwithRaspbianimage,flashingonLinuxcommand-lineinterface-basedapproach/Acommand-lineinterface-basedapproachGUI-basedapproach/GUI-basedapproach
sensorsselecting/Engagethrusters,SensorselectionLightDependentResistors/LightDependentResistorsInfrared(IR)emitter/detector/Infraredemitter/detector
seriallibrary/Prepareforliftoffserialportcommunication
about/SerialportcommunicationwiththeRaspberryPiPythonprogram,forWeasleyclock/PythonprogramfortheWeasleyclockArduinoacknowledgement,forcontrollingsignal/Controlflowfortheweatherclock
shebang/Engagethrustersshields/Whyisitawesome?simpleexercisetool
building/Prepareforliftoff,Engagethrusterssourcefiles
URL,forOpenCVinstallation/MissionchecklistSparkCore
URL/SettingupandtestingSparkCoretointeractwithappliances

settingup/PrepareforliftoffLEDexample,implementing/EngageThrusters
SparkCoreboardURL/Missionchecklist
SparkFunURL/Alternativesolutionsandsomeprojectideastoconsider,Prepareforliftoff
SPI(SerialPeripheralInterface)/Howdoesitwork?SSH(SecureShell)/GainingremoteaccesstoyourRaspberryPitocontrolappliancessteppermotor
about/Prepareforliftoffcontrolling,Arduinoused/Prepareforliftoff,Engagethrusterscounterclockwiserotation/Counterclockwiserotationofthesteppermotor
switches,ConnectFourdesktopsettingup,withcardboardbox/Setupoftheswitchesusingacardboardbox,Prepareforliftoff,Engagethrusters

Ttabletopmusicalfountainproject
building/Missionbriefingfeatures/Whyisitawesome?objectives/Yourobjectiveschecklist/Missionchecklistassembling/MissionchecklistDIYfountainkit/PrepareforliftoffFlaskframework,installing/InstallationoftheFlaskframework,EngagethrustersRGBLEDs,controllingfromwebpage/ControllingRGBLEDsfromawebpage,Engagethrusterse-mailalerts,settingup/Setupofthee-mailalertsinthefountain,Engagethrusters,Objectivecomplete–minidebriefing
TheThingBoxProjectabout/#5TheThingboxprojectURL/#5TheThingboxproject
tipsandtricksprojectabout/Missionbriefingfeatures/Whyisitawesome?objectives/Yourobjectiveschecklist/Missionchecklist
TkinterURL/Engagethrusters
trackbuilding,withelectricaltape/Useelectricaltapeandbuildatrack

UUI,ConnectFourgame
about/GettingstartedwiththeConnectFourgame(UIandsoundeffects),Prepareforliftoffmenu,adding/Addingamenuforthegamesounds,adding/Addingsoundstothegame
USBBatterypackURL/Prepareforliftoff
WWeasleyWeatherClock
about/TheWeasleyweatherclockrequisites/Prepareforliftoffassembling/Engagethrusters
WeavedURL/GainingremoteaccesstoyourRaspberryPitocontrolappliances,RemotelyloggingintheRaspberryPifromanywhereontheInternet
web.pytutorialsURL/References
webdevelopmentGoogleCoderused/#2WebdevelopmentusingGoogleCoder
webserverinstalling/Installingthewebserver,Engagethrustersinterfacing/Interfacingthewebserver,Engagethrusters,Objectivecomplete–minidebriefingsettingup,forrecordinghealthparameters/Settingupawebservertorecordhealthparameters,Prepareforliftoff,Engagethrusters
Win32DiskImagertool/WindowsWindows
SDcardwithRaspbianimage,flashing/WindowsWinSCP
URL/#1–SimpletrickforPythondevelopmentviaremoteloginWonderHowTo
URL/EngagethrustersWordnikAPI
URL/ImprovingyourvocabularyusingtheRaspberryPiinstalling/Prepareforliftoffusing/Engagethrusters
WordOfTheDayobjectURL/Engagethrusters