projecto do difusor de uma turbina tetra-radial auto ... · abstract the present work concerns the...
TRANSCRIPT

Projecto do difusor de uma turbina tetra-radialauto-rectificadora
José Tomás Queiroz de Melo
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Orientadores: Prof. Luís Manuel de Carvalho Gato
Prof. João Carlos de Campos Henriques
Júri
Presidente: Prof. Viriato Sérgio de Almeida Semião
Orientador: Prof. João Carlos de Campos Henriques
Vogal: Prof. José Carlos Páscoa Marques
Julho 2016


Resumo
No âmbito da presente dissertação efectuou-se a primeira optimização de um difusor para
a turbina tetra-radial auto-rectificadora, que surge como alternativa às turbinas convencionais
em dispositivos de coluna de água oscilante. A nova turbina diferencia-se das restantes pela
capacidade do rotor funcionar sem alterar o sentido de rotação, independente do sentido do
escoamento, e por apresentar um rendimento de pico cerca de 10% superior ao da melhor
turbina actual. A eficiência da nova turbina encontra-se directamente ligada ao desempenho
do difusor, pelo que o mesmo terá um grande impacto no rendimento global da turbina. Neste
sentido, a presente dissertação incide na criação de várias geometrias do difusor, análise dos
respectivos comportamentos e posterior identificação da geometria óptima de modo a maximi-
zar a eficiência da turbina. Para tal efeito, com recurso à linguagem de programação orientada
por objectos Python, desenvolveu-se um algoritmo capaz de gerar malha parametrizada e, em
seguida, analisou-se o respectivo comportamento através do software comercial Fluent. Para
encontrar a geometria óptima do difusor utilizou-se um algoritmo de evolução genética e, de-
pois, procedeu-se à análise dos resultados obtidos na optimização. Por fim, realizou-se uma
análise detalhada à influência de cada parâmetro geométrico no desempenho do difusor.
Palavras chave: Mecânica dos Fluidos Computacional; Turbina tetra-radial; Optimização de
um difusor; Coluna de Água Oscilante.
i

ii

Abstract
The present work concerns the optimization of a tetra-radial turbine diffuser. This turbine
is self-rectifying, which makes it suitable to be used in oscillating water column wave energy
converters. Also, the tetra-radial turbine differentiates from other turbines due to its peak effi-
ciency being 10% higher than the best available turbine. However, the new turbine efficiency is
directly related to the diffuser performance. Therefore, the present work consists in the crea-
tion of multiple geometries for the diffuser, analysis of the respective behaviour and finding the
optimum geometry in order to reach higher efficiency. To achieve such purpose, an algorithm
capable of generating a parametrized mesh for the diffuser was developed in Python, and then
the flow was analysed in the commercial software Fluent. In order to find the optimum diffuser,
a Differential Evolution algorithm was implemented and the respective results were analysed.
Finally, a detailed analysis of the influence of each geometric parameter regarding the diffuser
performance was carried out.
Keywords: Computational Fluid Dynamics; Oscillating Water Column; Diffuser optimization;
Tetra-radial turbine.
iii

iv

Conteúdo
1 Introdução 1
1.1 Estado da arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Energia das ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.2 Dispositivo de Coluna de Água Oscilante . . . . . . . . . . . . . . . . . . 4
1.1.3 Aspectos gerais da turbina tetra-radial auto-rectificadora . . . . . . . . . . 5
1.2 Objectivos e metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Modelação da geometria do difusor 9
2.1 Curvas de Bézier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Modelação da superfície do difusor . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Superfície A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.2 Superfície B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.3 Superfície C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Geração da malha 21
3.1 Aspectos gerais sobre a geração de uma malha . . . . . . . . . . . . . . . . . . 24
3.2 Interpolação de Coons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Camada limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4 Geração de malha para o bloco A . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5 Geração de malha para o bloco B . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.6 Geração de malha para bloco do Interior . . . . . . . . . . . . . . . . . . . . . . . 34
3.7 Geração de malha para o bloco do cotovelo . . . . . . . . . . . . . . . . . . . . . 36
3.8 Evolução da malha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4 Optimização do difusor 41
4.1 Cálculo do escoamento no difusor . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.2 Algoritmo de evolução genética . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
v
5 Análise de resultados 47
5.1 Análise preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.2 Análise do efeito do arredondamento da saída, ks . . . . . . . . . . . . . . . . . 50
5.3 Análise do efeito do arredondamento da cunha, kc . . . . . . . . . . . . . . . . . 51
5.4 Análise do raio da cunha Rc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.5 Análise do raio exterior Re . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.6 Análise dos resultados obtidos na optimização do difusor . . . . . . . . . . . . . 54
5.7 Validação e estimativa do erro de discretização da malha . . . . . . . . . . . . . 56
5.8 Análise da altura da secção de saída hs . . . . . . . . . . . . . . . . . . . . . . . 61
5.9 Análise do ângulo do escoamento γ . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.10 Comparação entre uma secção de saída elíptica e uma rectangular . . . . . . . 63
5.11 Análise da altura hs e largura da secção de saída Ls para uma área As constante 64
5.12 Análise do ângulo do cotovelo θc . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6 Conclusões 67
Bibliografia 71
vi

Lista de Figuras
1.1 Ilustração do funcionamento de um dispositivo de Corpo Oscilante. . . . . . . . 3
1.2 Ilustração do funcionamento de um dispositivo de "Overtopping”. . . . . . . . . . 3
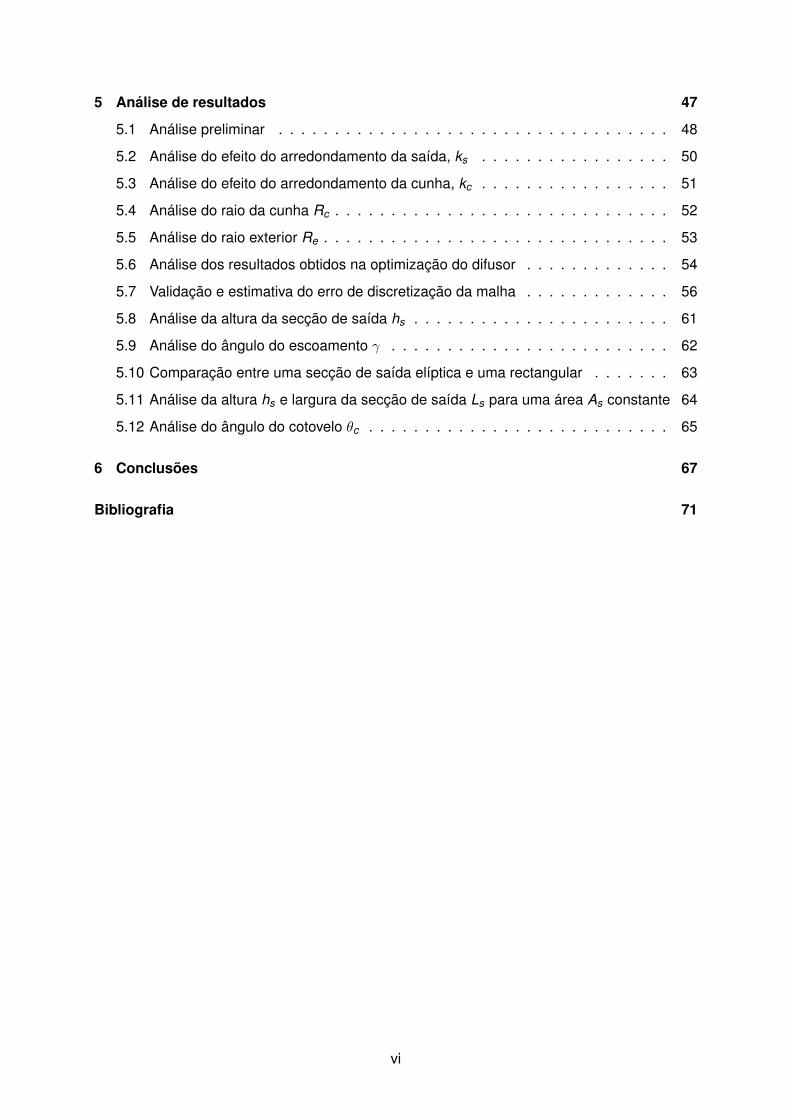
1.3 Ilustração do funcionamento de um dispositivo de Coluna de Água Oscilante. . . 4
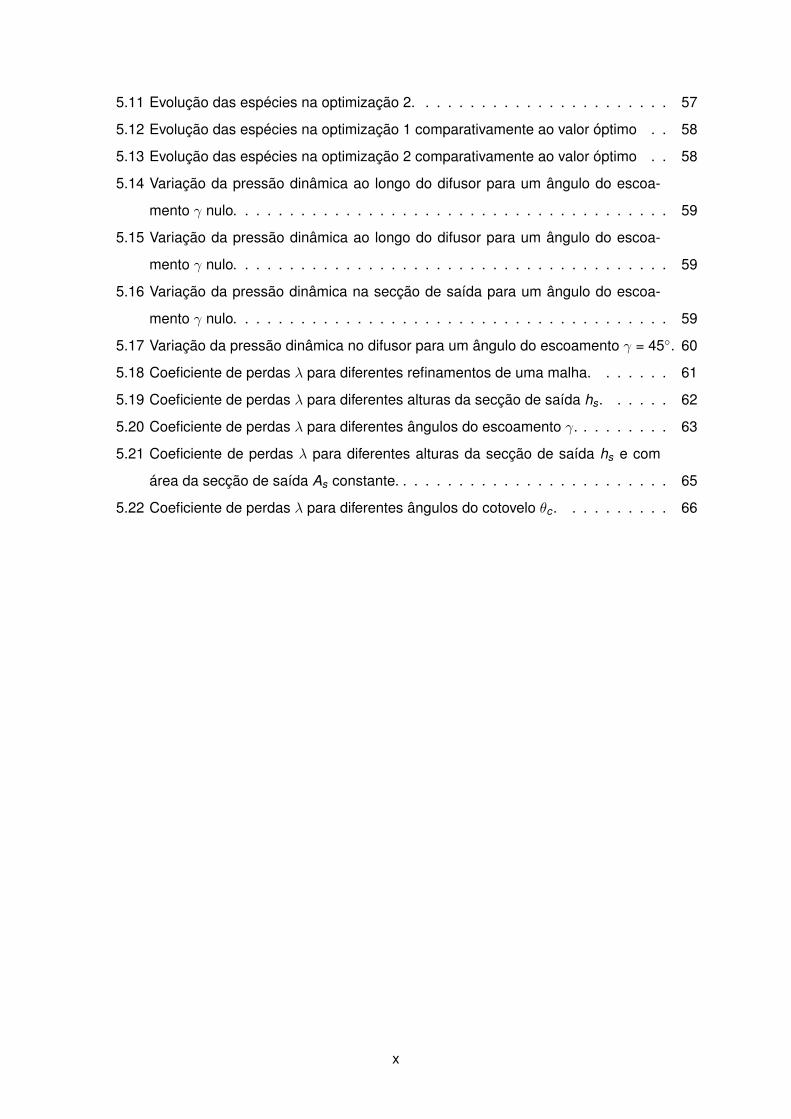
1.4 Ilustração de um dispositivo de Coluna de Água Oscilante junto à costa. . . . . . 4
1.5 Ilustração da utilização de válvulas para rectificar o escoamento no interior de
um dispositivo de coluna de água oscilante. . . . . . . . . . . . . . . . . . . . . . 5
1.6 Esquema representativo da nova turbina com escoamento radial à entrada [1]. . 6
1.7 Esquema representativo da nova turbina com escoamento axial à entrada [1]. . 6
1.8 Esquema ilustrativo da utilização de uma válvula de duas posições na nova tur-
bina [4]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.9 Esquema ilustrativo da utilização de uma válvula de três posições na nova tur-
bina [4]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.10 a) Esquema que descreve o funcionamento geral do processo de optimização.
b) Esquema que descreve a sequência de operações implementadas no algo-
ritmo programado em Python. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 Geometria do difusor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Curva de Bézier traçada com base em dois pontos de controlo. . . . . . . . . . . 10
2.3 Curva de Bézier traçada com base em três pontos de controlo. . . . . . . . . . . 11
2.4 Curva de Bézier traçada com base em quatro pontos de controlo. . . . . . . . . 11
2.5 Aspecto de uma secção do difusor. . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.6 Superfície A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.7 Superfície B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.8 Superfície C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.9 Parâmetros geométricos utilizados na construção do difusor. . . . . . . . . . . . 13
2.10 Diferentes curvas que compõem a fronteira da superfície A1. . . . . . . . . . . . 14
2.11 Curva 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
vii

2.12 Superfície A1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.13 Superfície B1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.14 Curvas que definem a fronteira da superfície B1 . . . . . . . . . . . . . . . . . . 17
2.15 Curva 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.16 Curva 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.17 Curva 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.18 Superfícies A e B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.19 Conjunto das superfícies A, B e C. . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1 Malha do difusor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Malha de uma secção para um difusor com secção de saída rectangular. . . . . 21
3.3 Malha de uma secção para um difusor com secção de saída elíptica. . . . . . . 22
3.4 Malha do bloco A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.5 Malha do bloco B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.6 Malha do bloco I. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.7 Malha do bloco C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.8 Ilustração do aspecto de uma malha estruturada. . . . . . . . . . . . . . . . . . . 24
3.9 Ilustração do aspecto de uma malha não-estruturada. . . . . . . . . . . . . . . . 24
3.10 Prisma quadrangular, triangular e pirâmide triangular - alguns dos elementos
mais utilizados em malhas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.11 Elementos tetraédricos deformados prejudicam a qualidade da solução da malha. 26
3.12 Superfície definida a partir das quatro curvas compõem a respectiva fronteira. . 26
3.13 Interpolação linear entre duas curvas opostas. . . . . . . . . . . . . . . . . . . . 27
3.14 Interpolação linear das duas curvas restantes. . . . . . . . . . . . . . . . . . . . 27
3.15 Interpolação linear do plano que contém os quatro vértices da fronteira da su-
perfície. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.16 Superfície resultante da aplicação da Eq. (3.4). . . . . . . . . . . . . . . . . . . . 28
3.17 Perfil de velocidade. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.18 Perfil de velocidade sob efeito de um gradiente de pressão adverso. . . . . . . . 29
3.19 Distribuição exponencial utilizada para representar a camada limite. . . . . . . . 29
3.20 Malha gerada para o bloco A com base no software vmsh2d [7]. . . . . . . . . . 30
3.21 As diversas camadas do bloco A antes do respectivo acoplamento. . . . . . . . . 31
3.22 Malha gerada para o bloco A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.23 Zona do bloco B onde é esperada a presença de um ponto de estagnação. . . . 32
3.24 Malha 2D gerada para o quadrilátero. . . . . . . . . . . . . . . . . . . . . . . . . 32
viii

3.25 Malha 2D do quadrilátero aplicada sobre a superfície B1. . . . . . . . . . . . . . 33
3.26 Malha do bloco B1 após a aplicação à superfície B da distribuição de pontos
associada à camada limite. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
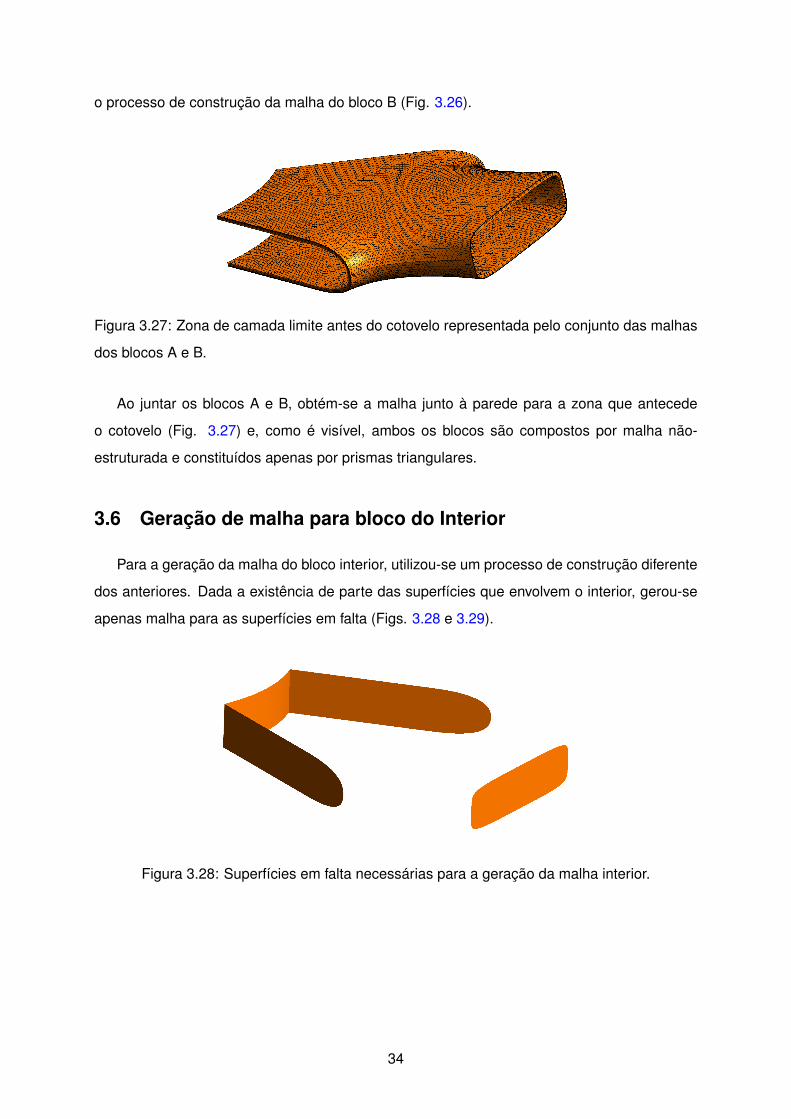
3.27 Zona de camada limite antes do cotovelo representada pelo conjunto das ma-
lhas dos blocos A e B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.28 Superfícies em falta necessárias para a geração da malha interior. . . . . . . . . 34
3.29 Malha gerada para as superfícies em falta para a geração da malha interior. . . 35
3.30 Elementos tetraédricos que compõem o interior da malha. . . . . . . . . . . . . . 35
3.31 Bloco de malha que representa a zona que antecede o cotovelo, formado pela
união dos blocos A, B e I. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.32 Malha do interior do cotovelo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.33 Malha da camada limite do cotovelo. . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.34 Primeira geometria [4] abordada na presente dissertação. . . . . . . . . . . . . . 37
3.35 Presença de elementos muito deformados junto ao início do cotovelo na super-
fície A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.36 Curvatura pouco suave da superfície B após tentativa de resolução do problema
presente na Fig. 3.35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.1 Condições de fronteira utilizadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.1 Secções de saída do difusor abordadas em [4] com a respectiva área de saída
As definida adimensionalmente com base no raio interior Ri . . . . . . . . . . . . 49
5.2 Coeficiente de perdas λ, definido como ε em [4], em função do ângulo do esco-
amento γ para as diferentes geometrias do difusor presentes em [4]. . . . . . . . 49
5.3 Coeficiente de perdas λ de cada secção para um ângulo do escoamento γ nulo
em função da respectiva área da secção de saída As . . . . . . . . . . . . . . . 50
5.4 Coeficiente de perdas λ para diferentes valores da constante de arredonda-
mento da saída ks. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.5 Coeficiente de perdas λ para diferentes valores da constante de arredonda-
mento da saída kc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.6 Coeficiente de perdas λ para diferentes raios da cunha Rc . . . . . . . . . . . . . 53
5.7 Coeficiente de perdas λ para diferentes raios exteriores Re. . . . . . . . . . . . . 54
5.8 Valores da distância adimensional à parede y+ para a malha. . . . . . . . . . . . 56
5.9 Evolução dos resíduos do solver do Fluent. . . . . . . . . . . . . . . . . . . . . . 57
5.10 Evolução das espécies na optimização 1. . . . . . . . . . . . . . . . . . . . . . . 57
ix
5.11 Evolução das espécies na optimização 2. . . . . . . . . . . . . . . . . . . . . . . 57
5.12 Evolução das espécies na optimização 1 comparativamente ao valor óptimo . . 58
5.13 Evolução das espécies na optimização 2 comparativamente ao valor óptimo . . 58
5.14 Variação da pressão dinâmica ao longo do difusor para um ângulo do escoa-
mento γ nulo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.15 Variação da pressão dinâmica ao longo do difusor para um ângulo do escoa-
mento γ nulo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.16 Variação da pressão dinâmica na secção de saída para um ângulo do escoa-
mento γ nulo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.17 Variação da pressão dinâmica no difusor para um ângulo do escoamento γ = 45◦. 60
5.18 Coeficiente de perdas λ para diferentes refinamentos de uma malha. . . . . . . 61
5.19 Coeficiente de perdas λ para diferentes alturas da secção de saída hs. . . . . . 62
5.20 Coeficiente de perdas λ para diferentes ângulos do escoamento γ. . . . . . . . . 63
5.21 Coeficiente de perdas λ para diferentes alturas da secção de saída hs e com
área da secção de saída As constante. . . . . . . . . . . . . . . . . . . . . . . . . 65
5.22 Coeficiente de perdas λ para diferentes ângulos do cotovelo θc . . . . . . . . . . 66
x

Lista de Tabelas
5.1 Coeficiente de perdas λ para diferentes valores da constante de arredonda-
mento da saída ks. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2 Coeficiente de perdas λ para diferentes valores da constante de arredonda-
mento da saída kc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.3 Coeficiente de perdas λ para diferentes raios da cunha Rc . . . . . . . . . . . . . 53
5.4 Coeficiente de perdas λ para diferentes raios exteriores Re. . . . . . . . . . . . . 54
5.5 Resultados da geometria óptima e da geometria rectangular presente em [4]. . . 56
5.6 Estimativa do erro associado à discretização e parâmetros utilizados para o res-
pectivo cálculo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.7 Coeficiente de perdas λ para diferentes alturas da secção de saída hs. . . . . . 62
5.8 Coeficiente de perdas λ para diferentes ângulos do escoamento γ. . . . . . . . . 63
5.9 Coeficiente de perdas λ para uma secção elíptica e uma rectangular com a
mesma área de saída As. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.10 Coeficiente de perdas λ para diferentes alturas da secção de saída hs e com
área da secção de saída As constante. . . . . . . . . . . . . . . . . . . . . . . . . 65
5.11 Coeficiente de perdas λ para diferentes ângulos do cotovelo θc . . . . . . . . . . 66
xi

xii

Nomenclatura
Abreviaturas
2D = Bidimensional
CAO = Coluna de Água Oscilante
MFC = Mecânica dos Fluidos Computacional
3D = Tridimensional
Símbolos Romanos
xi = Abcissa do Ponto i
hs = Altura da secção de saída
hd = Altura do difusor
As = Área da secção de saída
An = Área de "n"
k = Constante
kc = Constante de arredondamento da secção da cunha
ks = Constante de arredondamento da secção de saída
zi = Cota do Ponto i
c(u) = Curva de Bézier
y+ = Distância adimensional à parede
Fs = Factor de Segurança
Ls = Largura da secção de saída
Ng = Número de gerações
Np = Número de indivíduos presentes em cada geração
N = Número de secções
yi = Ordenada do Ponto i
Bi ,n(u) = Polinómio de Bernstein
xiii

p0 = Pressão de estagnação
p = Pressão estática
Rc = Raio da cunha
Re = Raio exterior
Ri = Raio interior
Rt = Raio total
v = Velocidade
Vn = Volume de "n"
Símbolos Gregos
θn = Ângulo de cada secção
ϕ = Variável
ρ = Massa volúmica
γ = Ângulo do escoamento à entrada do difusor
λ = Coeficiente de perdas
xiv

Capítulo 1
Introdução
A presente dissertação foca-se no estudo do difusor da turbina tetra-radial auto-rectificadora,
para a aplicação em dispositivos de Coluna de Água Oscilante (CAO). Os CAO aproveitam o
fluxo de ar causado pelo movimento oscilatório das ondas, que provoca no interior da bóia uma
flutuação da pressão de acordo com a fase da onda. Isto significa que a pressão no exterior
permanece constante, igual à pressão atmosférica, enquanto a pressão no interior do corpo
oscila. Quando a pressão no interior é superior à pressão no exterior, ocorre uma compressão
do ar no interior da bóia. Por outro lado, quando a pressão interior é inferior à exterior, ocorre
uma expansão do ar no interior da bóia. Da alternância destes dois fenómenos e devido à
diferença de pressões entre o interior e o exterior, verifica-se a circulação do ar entre o interior
e o exterior. O rotor de uma turbina recebe o caudal de ar causado pela diferença de pressões
e, em seguida, a energia cinética proveniente do escoamento é transformada em energia ci-
nética de rotação. Por fim, após sair do rotor, o difusor da turbina recebe o escoamento com o
intuito de recuperar a energia cinética e conduzir o fluxo de ar entre o rotor e o destino.
A turbina tetra-radial auto-rectificadora permite aproveitar energia com base numa dife-
rença de pressão entre dois espaços, sem ocorrer a alteração do sentido de rotação do rotor.
A turbina pode ser encarada como uma turbina clássica, uma vez que na sua composição
existem: estator, rotor e difusor. A presente turbina diferencia-se por ser constituída por ape-
nas duas etapas, pela capacidade de funcionar em sentidos opostos sem alterar o sentido de
rotação do rotor [1]. Pelos motivos mencionados, a utilização da nova turbina destina-se a
aplicações onde ocorre o fluxo de ar de modo alternado entre o interior e o exterior - como os
dispositivos CAO.
O trabalho apresentado teve como objectivo determinar a geometria óptima do difusor que
será utilizado na nova turbina, ou seja, o difusor que permitirá maximizar a eficiência global
da nova turbina. Para determinar o difusor óptimo e compreender a influência dos diferentes
1

parâmetros geométricos no desempenho aerodinâmico do difusor, foi necessário efectuar uma
optimização e, por fim, analisar uma gama alargada de geometrias.
1.1 Estado da arte
1.1.1 Energia das ondas
O desenvolvimento da energia das ondas foi estimulado pela crise energética da década de
70, originada pelo grande aumento do preço do petróleo e, mais recentemente, pelo interesse
em combater o aquecimento global causado pelo efeito de estufa. As ondas do mar, além de
serem recursos não poluentes e renováveis, constituem uma matéria-prima gratuita. Apesar
da gratuitidade da matéria-prima, o custo inicial das instalações necessárias à produção de
energia das ondas constitui um elevado investimento inicial.
Ao contrário de outras fontes renováveis como a energia solar e éolica, a energia das ondas
encontra-se apenas numa fase de investigação e ainda não comercial.
A utilização da energia das ondas como fonte de energia apresenta grandes benefícios.
Além de renovável e amiga do ambiente, é uma das energias renováveis que apresenta me-
lhores rácios de energia por área (kW m−2) [2]. Outra grande vantagem reside no compor-
tamento das ondas ser facilmente previsível, facilitando o estudo e permitindo efectuar um
melhor aproveitamento dos recursos.
Qualquer zona que tenha uma zona costeira pode beneficiar deste tipo de tecnologia. Os
dispositivos utilizados para converter energia das ondas podem ser colocados junto à costa ou
então em águas profundas. Sendo que a sua colocação junto à costa apresenta como grande
vantagem a menor distância à rede, reduzindo os custos de instalação e manutenção. Como
desvantagem, na zona costeira as ondas apresentam uma força inferior e, consequentemente,
menor energia devido à menor profundidade. Quando os dispositivos encontram-se em águas
profundas ocorre a relação inversa.
Alguns dos meios mais utilizados para aproveitar a energia das ondas consistem em: Cor-
pos Oscilantes, conversores "Overtopping” e os dispositivos de CAO. Os corpos oscilantes
consistem num corpo flutuante ligado ao fundo do oceano cujo movimento de oscilação é
aproveitado por um dispositivo (Fig. 1.1). No caso do "Overtopping”, tal como o nome indica,
as ondas são obrigadas a contornar o topo do engenho e, em seguida, o fluxo é aproveitado
pelas várias turbinas do dispositivo (Fig. 1.2). Por fim, os dispositivos de CAO constituem os
de maior interesse na presente dissertação, dado que utilizam uma turbina para aproveitar o
escoamento de ar causado pela coluna de água oscilante [2] (Figs. 1.3 e 1.4).
2

Figura 1.1: Ilustração do funcionamento de um dispositivo de Corpo Oscilante.
Figura 1.2: Ilustração do funcionamento de um dispositivo de "Overtopping”.
3
Figura 1.3: Ilustração do funcionamento de um dispositivo de Coluna de Água Oscilante.
Figura 1.4: Ilustração de um dispositivo de Coluna de Água Oscilante junto à costa.
1.1.2 Dispositivo de Coluna de Água Oscilante
Os dispositivos CAO, em inglês Oscillating Water Column (OWC), podem ser interpretados
como uma câmara com uma abertura para a atmosfera e cujo fundo se encontra aberto para
4

Figura 1.5: Ilustração da utilização de válvulas para rectificar o escoamento no interior de um
dispositivo de coluna de água oscilante.
o mar. O efeito das ondas no dispositivo origina uma variação da pressão do ar no interior da
câmara. Por conseguinte, a variação da pressão origina uma expansão/compressão do ar no
interior da câmara, que acciona uma turbina.
Naturalmente, o comportamento da turbina influencia fortemente o desempenho desta fa-
mília de dispositivos. Esta pode ser auto-rectificadora ou utilizar válvulas (Fig. 1.5).
Neste último caso, a turbina pode recorrer a válvulas para rectificar o escoamento, para a
turbina operar sem alterar o sentido de rotação. Logo, existe uma preferência pelas turbinas
auto-rectificadoras, uma vez que estas são mais simples por não utilizarem válvulas para rec-
tificar o escoamento. As turbinas mais utilizadas neste tipo de dispositivos são as turbinas do
tipo Wells e de Impulso [3].
1.1.3 Aspectos gerais da turbina tetra-radial auto-rectificadora
A turbina tetra-radial auto-rectificadora surge como uma alternativa às turbinas convencio-
nais. A turbina extrai energia a partir do fluxo de ar entre dois espaços A e B, onde o primeiro
corresponde, normalmente, à atmosfera e o segundo ao interior da câmara de um dispositivo
de coluna de água oscilante. No caso da turbina ser do tipo tetra-radial, o escoamento à en-
trada e à saída possui direcção radial (Fig. 1.6). Porém, a nova turbina pode ser adaptada
para que o escoamento à entrada seja axial se assim for desejado (Fig. 1.7).
5

Figura 1.6: Esquema representativo da nova turbina com escoamento radial à entrada [1].
Figura 1.7: Esquema representativo da nova turbina com escoamento axial à entrada [1].
Na turbomáquina apresentada existem dois conjuntos dispostos simetricamente, onde cada
conjunto assemelha-se a um andar de uma turbina convencional, dispondo de um estator, rotor
e difusor. No entanto, a nova turbina distingue-se pela sua capacidade de funcionar sem alte-
rar o sentido de rotação e por apresentar um rendimento de pico 10% superior ao da melhor
turbina actual [4]. Ambos os rotores assentam no mesmo veio, porém funcionam em situações
diferentes: um dos conjuntos funciona quando o fluxo de ar vai de A para B e o outro conjunto
funciona no sentido inverso.
Um dos problemas inerentes à estrutura da turbina reside no escape de ar pelo conjunto
que não se encontra a ser utilizado. Para este problema, uma solução proposta reside na
colocação de uma válvula axial de duas posições (Fig. 1.8). Quando a etapa de A para
B encontra-se em funcionamento, a válvula encerrará as condutas da etapa inactiva. Outra
solução consiste na utilização de uma válvula de três posições (Fig. 1.9), que além de resolver
o problema anterior, permite aumentar a potência extraída através de "latching” - aplicação de
controlo de fase [4].
6

Figura 1.8: Esquema ilustrativo da utilização de uma válvula de duas posições na nova turbina
[4].
Figura 1.9: Esquema ilustrativo da utilização de uma válvula de três posições na nova turbina
[4].
1.2 Objectivos e metodologia
A presente dissertação de mestrado teve o intuito de realizar a primeira optimização de
um difusor para a turbina tetra-radial. De forma a cumprir este objectivo, implementou-se um
algoritmo na linguagem de programação orientada por objectos Python, capaz de gerar uma
malha parametrizada com base numa série de dados de entrada, para de seguida descobrir a
solução óptima. O mesmo consiste em três partes (Fig. 1.10 a)), sendo a primeira o algoritmo
que gera malha em Python (Fig. 1.10 b)), a segunda o software comercial Fluent, que avalia
o desempenho das diversas malhas e a última o algoritmo de evolução genética, responsável
pela optimização da geometria da turbina.
O algoritmo de construção da malha anteriormente referido utiliza dois tipos de parâmetros.
O primeiro de carácter fixo e associado às características físicas do difusor e o segundo tipo
consiste nos parâmetros-alvo da optimização. Após o programa receber todos os parâmetros
de entrada constrói a malha do difusor e prepara os ficheiros para que seja possível analisar o
escoamento através do difusor no Fluent.
A componente da optimização utiliza um algoritmo de evolução genética, que produz uma
7

(a) (b)
Figura 1.10: a) Esquema que descreve o funcionamento geral do processo de optimização. b)
Esquema que descreve a sequência de operações implementadas no algoritmo programado
em Python.
população inicial e, em seguida, o algoritmo da malha gera a mesma para cada indivíduo da
população. No fim do processo, o Fluent fornece os resultados referentes à função objectivo
que se pretende optimizar para cada indivíduo e o algoritmo de evolução genética processa
os valores obtidos para a função e, em seguida, fornece os parâmetros da geração seguinte.
Após a conclusão deste processo iterativo, o algoritmo apresenta, como solução óptima, o
melhor indivíduo de todas as gerações (Fig. 1.10 b)), ou seja, a geometria óptima.
Por fim, realizou-se uma análise dos resultados da geometria óptima e efectuou-se o estudo
das diversas características do difusor, com o intuito de compreender a dimensão do impacto
de cada uma no seu comportamento.
8

Capítulo 2
Modelação da geometria do difusor
No presente capítulo encontra-se o processo de modelação da geometria do difusor, sendo
apenas descrita a geração da superfície do difusor.
Devido às características da nova turbina, foi necessário criar um difusor com uma forma
pouco convencional, semelhante ao entrelaçamento de duas mãos (Fig. 2.1).
Figura 2.1: Geometria do difusor.
Na construção desta geometria, o conceito de curva de Bézier merece especial relevo.
Este conceito será brevemente explicado na próxima secção e, posteriormente, será descrito
o processo utilizado para a modelação das várias superfícies que constituem a superfície do
difusor.
9
2.1 Curvas de Bézier
As curvas de Bézier constituem uma família de linhas paramétricas muito utilizadas em
desenho assistido por computador. Estas curvas foram criadas por Pierre Bézier e possuem
uma série de propriedades que as tornam muito populares. Ao contrário de outras curvas, as
curvas de Bézier podem dobrar-se sobre si próprias. Sendo possível, também, a obtenção de
uma curva suave e contínua a partir da junção de várias curvas de Bézier [5].
Algumas das propriedades das curvas de Bézier [5] são:
• As funções base são de variável real e não-negativas.
• O grau de cada polinómio é uma ordem inferior ao número de pontos.
• O primeiro e último ponto são coincidentes com o primeiro e último pontos de controlo.
• A curva é tangente à primeira e última secção do polígono de Bézier.
• A curva encontra-se no interior do polígono convexo, definido pelos pontos de controlo.
A construção das curvas começa pela escolha dos pontos de controlo, seguida da constru-
ção dos polinómios de Bernstein, representados por
Bi ,n(u) =n!
i ! (n − i)ui (1− u)n−i . (2.1)
Com base nestes polinómios é finalmente realizada a construção da curva de Bézier, dada
por
c(u) =n∑
i=0
Bi ,n(u) Pi , 0 < u < 1. (2.2)
Na presente dissertação recorreu-se, no máximo, a quatro pontos de controlo, sendo que
no caso de dois pontos de controlo obtem-se uma recta como resultado (Fig. 2.2); e no caso
de um conjunto com três ou quatro pontos de controlo obtem-se uma curva suave (Figs.2.3 e
2.4 respectivamente).
Figura 2.2: Curva de Bézier traçada com base em dois pontos de controlo.
10

Figura 2.3: Curva de Bézier traçada com base em três pontos de controlo.
Figura 2.4: Curva de Bézier traçada com base em quatro pontos de controlo.
2.2 Modelação da superfície do difusor
Dada a periodicidade angular do difusor, dividiu-se o mesmo em várias secções idênticas
(Fig. 2.5). De seguida, cada secção foi decomposta nas três superfícies A, B e C (Figs. 2.6,
2.7 e 2.8 respectivamente).
Figura 2.5: Aspecto de uma secção do difusor.
11
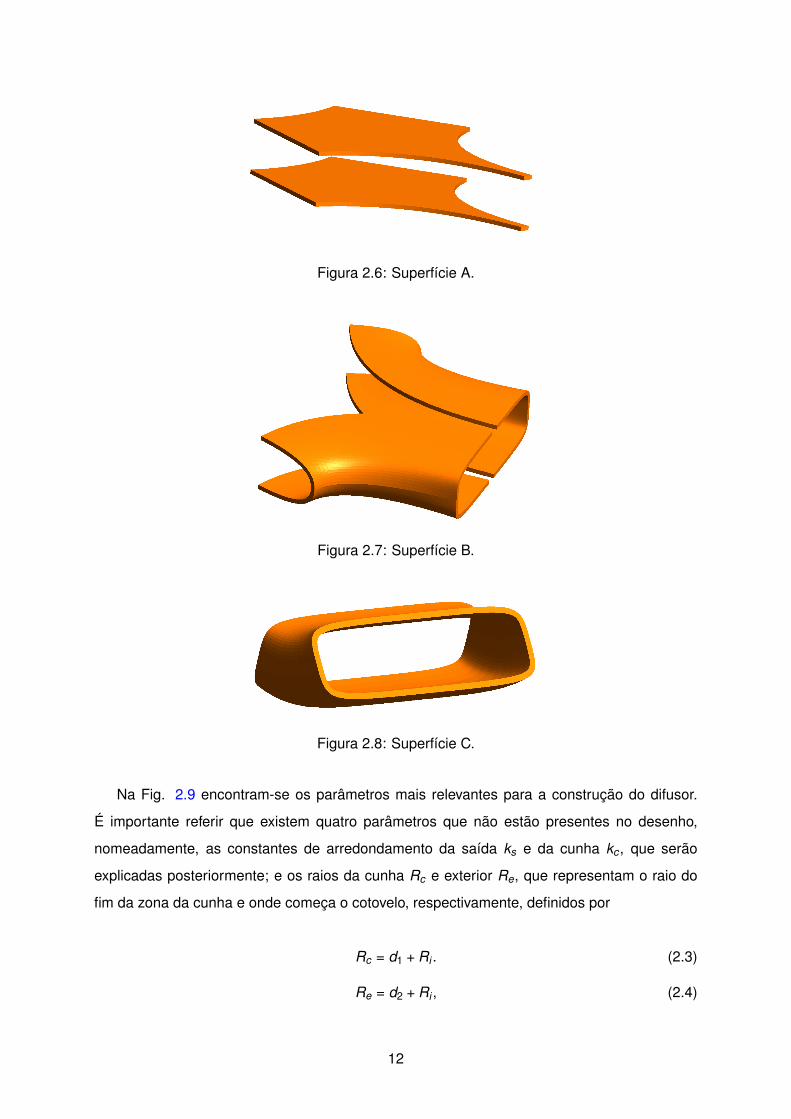
Figura 2.6: Superfície A.
Figura 2.7: Superfície B.
Figura 2.8: Superfície C.
Na Fig. 2.9 encontram-se os parâmetros mais relevantes para a construção do difusor.
É importante referir que existem quatro parâmetros que não estão presentes no desenho,
nomeadamente, as constantes de arredondamento da saída ks e da cunha kc , que serão
explicadas posteriormente; e os raios da cunha Rc e exterior Re, que representam o raio do
fim da zona da cunha e onde começa o cotovelo, respectivamente, definidos por
Rc = d1 + Ri . (2.3)
Re = d2 + Ri , (2.4)
12

Figura 2.9: Parâmetros geométricos utilizados na construção do difusor.
2.2.1 Superfície A
A superfície A encontra-se paralela aos planos XZ , YZ e perpendicular ao plano XY . O eixo
das ordenadas encontra-se alinhado com a direcção do escoamento à entrada da conduta, isto
se o escoamento à entrada possuir apenas componente radial.
Como é possível visualizar na Fig. 2.6, a superfície A pode ser descomposta em duas su-
perfícies idênticas A1 e A2. Estas obviamente possuem a mesma componente (x , y ) e diferem
apenas no valor da cota. Para facilitação dos cálculos, as superfícies foram dispostas sime-
tricamente relativamente ao plano XY ; e, portanto, A1 foi definida como (x , y , z) e A2 como
(x , y ,−z).
13

P4P5
P3
P2
P1P6
Curva 6
Curva 1
Curva 2
Curva 3
Curva 4
Curva 5
x
y
Figura 2.10: Diferentes curvas que compõem a fronteira da superfície A1.
A fronteira da superfície A1 é composta por seis curvas (Fig. 2.10). As curvas 5 e 3
constituem duas rectas idênticas e as curvas 6 e 2 constituem duas curvas de Bézier, em que
as curvas 5 e 6 consistem nos espelhamentos de 3 e 2 (respectivamente) em relação ao plano
YZ . As restantes linhas constituem uma recta (curva 1) e um arco de circunferência (curva 4).
Pelo que a curva 1 consiste numa recta entre os pontos P1 e P6, dados respectivamente por
x1 = d3, (2.5)
y1 = Re, (2.6)
x6 = −d3, (2.7)
y6 = Re. (2.8)
Figura 2.11: Curva 2
A existência da curva 1 constitui um mero auxílio para a geração da malha. Por este motivo,
14

não se considerou d3 (metade da distância entre os pontos P1 e P6) um parâmetro geométrico
relevante para a geometria do difusor.
No caso da curva 2 (Fig. 2.11) utilizou-se uma curva de Bézier, dada a necessidade de
garantir que a mesma intersecta perpendicularmente as curvas 1 e 3. Para garantir que a
curva obedece às exigências utilizaram-se três pontos de controlo, P1, P2 e P3, que foram
calculados a partir de
θn =2πN
, (2.9)
x3 = d sin(θn/2), (2.10)
y3 = d cos(θn/2), (2.11)
x2 = x1, (2.12)
y2 = y1 + (x1 − x3)sin(θn/2)tan(θn/2)
. (2.13)
À semelhança da curva 1, a curva 3 constitui também uma recta, definida, no entanto, pelos
pontos P3 e P4. Em coordenadas radiais esta recta pode ser considerada como uma linha de
ângulo constante e raio variável, representada por
x = r cos(θn/2), Ri < r < Ri + d , (2.14)
y = r sin(θn/2), Ri < r < Ri + d . (2.15)
Por último, definiu-se a curva 4, que consiste num arco de circunferência entre os pontos
P4 e P5. Como tal, esta constitui uma curva de raio constante e com ângulo variável, dada por
x = Ri cos(θ), −θn/2 < θ < θn/2, (2.16)
y = Ri sin(θ), −θn/2 < θ < θn/2. (2.17)
Estão definidas as curvas necessárias para finalizar a superfície A1, ou seja, basta efectuar
o espelhamento das curvas 3 e 4 para que a fronteira fique fechada. A superfície final está
representada na Fig. 2.12 e, por fim, para finalizar a modelação da superfície A, basta espelhar
em relação a XY a superfície A1.
15

Figura 2.12: Superfície A1.
2.2.2 Superfície B
A superfície B pode ser decomposta em quatro componentes idênticas (Figs. 2.13 e 2.14).
Sendo que as curvas 2, 6, 7 e 8 (Figs. 2.11, 2.15, 2.16 e 2.17, respectivamente) compõem a
fronteira de cada uma dessas superfícies B1. A curva 2 foi descrita na secção anterior, pelo
que será apenas explicado o método de criação das curvas 6, 7 e 8. À semelhança da curva
2, as curvas 6, 7 e 8 são curvas de Bézier. No caso da curva 8, esta também utiliza três pontos
de controlo. Por outro lado, as curvas 6 e 7 utilizam quatro pontos de controlo. Como será visto
posteriormente, a utilização de três pontos de controlo limitaria drasticamente a capacidade de
analisar a geometria nessas zonas, o que por conseguinte limitaria a margem de optimização.
Figura 2.13: Superfície B1.
16

Figura 2.14: Curvas que definem a fronteira da superfície B1
Figura 2.15: Curva 6.
Figura 2.16: Curva 7.
17

Figura 2.17: Curva 8.
A curva 6 foi gerada em coordenadas polares e, em seguida, convertida para coordenadas
cartesianas, através de
x = r sin(θn/2), (2.18)
y = r cos(θn/2). (2.19)
Para esta curva utilizaram-se os pontos P3, P7, P8 e P9, representados por
r7 = (Rc − d) + d kc , (2.20)
z7 = hd , (2.21)
r8 = Rc , (2.22)
z8 = hd kc , (2.23)
r9 = Rc , (2.24)
z9 = hd kc . (2.25)
Porém, para controlar o tipo de secção, isto é, para controlar a abertura da elipse, utilizou-
se o parâmetro denominado constante de arredondamento da cunha kc . Quanto maior o valor
deste parâmetro, maior será a abertura. No caso limite, em que o parâmetro adquire um valor
unitário, a secção assume a forma de um rectângulo devido à elevada abertura da elipse.
A curva 8 é uma curva de Bézier que pretende representar a secção entre a entrada do
difusor e o início do cotovelo. Assim como a curva 6, esta utiliza quatro pontos de controlo, P1,
P10, P11 e P12, representados por
x1 = d3, (2.26)
z1 = hd , (2.27)
x10 = d3 + (Ls − d3) ks, (2.28)
18

z10 = hd , (2.29)
x11 = Ls, (2.30)
z12 = 0. (2.31)
À semelhança da curva anterior, utilizou-se o parâmetro denominado constante de arre-
dondamento da secção de saída ks para controlar a amplitude da elipse.
Para finalizar a construção da fronteira, modelou-se a curva 7. Esta utiliza o mesmo método
que a curva 2, dada a necessidade de assegurar uma transição suave do escoamento. Os
pontos de controlo escolhidos foram P12, P9 e P13, sendo este último dado por
x13 = x1, (2.32)
y13 = y1 + (x1 − x12)sin(θn/2)tan(θn/2)
. (2.33)
Figura 2.18: Superfícies A e B.
Estando definida a superfície B1 (Fig. 2.13), realizou-se o espelhamento desta sobre os
planos XY , YZ ; e relativamente ao eixo das ordenadas. Uma vez concluído o espelhamento,
encontra-se finalizada a modelação da superfície B.
2.2.3 Superfície C
A superfície C corresponde à zona do cotovelo. Esta zona foi modelada através de uma
rotação da secção da saída do difusor em torno de um eixo imaginário, representada pela
matriz:
x
′
y′
z′
=
1 0 0
0 r cos(ϕ) −r sin(ϕ)
0 r sin(ϕ) r cos(ϕ)
x
y
z
(2.34)
19

Figura 2.19: Conjunto das superfícies A, B e C.
20
Capítulo 3
Geração da malha
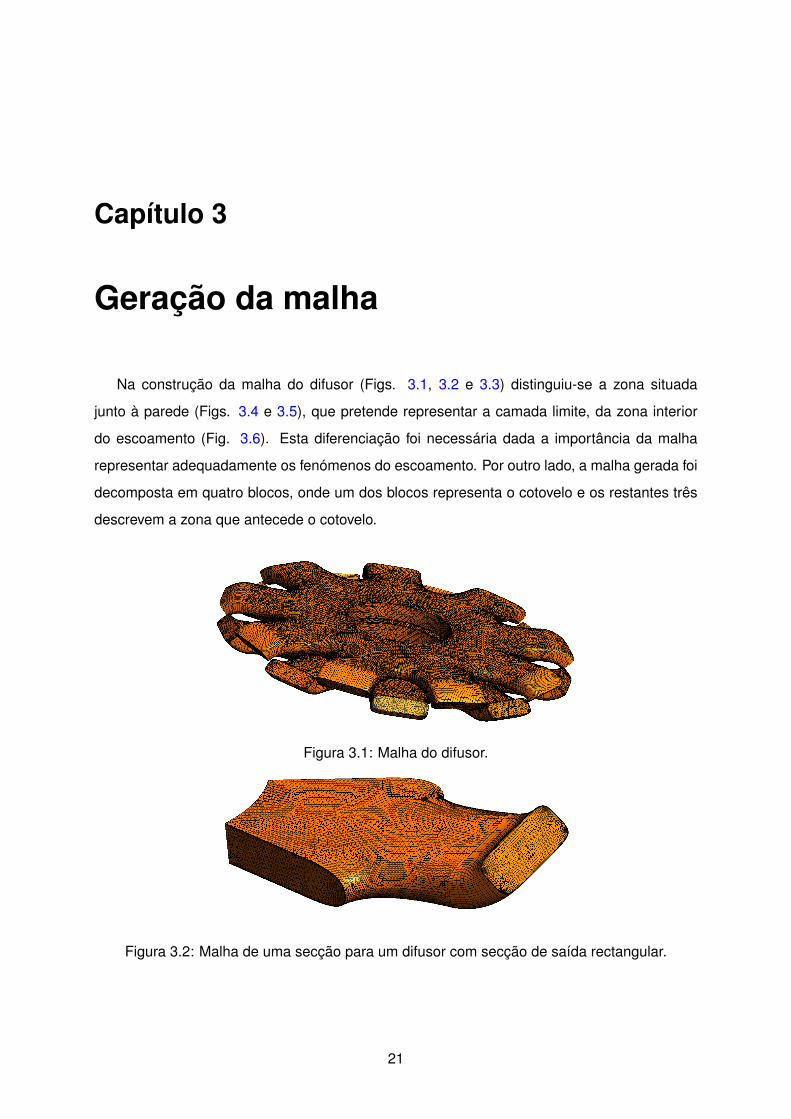
Na construção da malha do difusor (Figs. 3.1, 3.2 e 3.3) distinguiu-se a zona situada
junto à parede (Figs. 3.4 e 3.5), que pretende representar a camada limite, da zona interior
do escoamento (Fig. 3.6). Esta diferenciação foi necessária dada a importância da malha
representar adequadamente os fenómenos do escoamento. Por outro lado, a malha gerada foi
decomposta em quatro blocos, onde um dos blocos representa o cotovelo e os restantes três
descrevem a zona que antecede o cotovelo.
Figura 3.1: Malha do difusor.
Figura 3.2: Malha de uma secção para um difusor com secção de saída rectangular.
21

Figura 3.3: Malha de uma secção para um difusor com secção de saída elíptica.
Figura 3.4: Malha do bloco A.
Figura 3.5: Malha do bloco B.
22
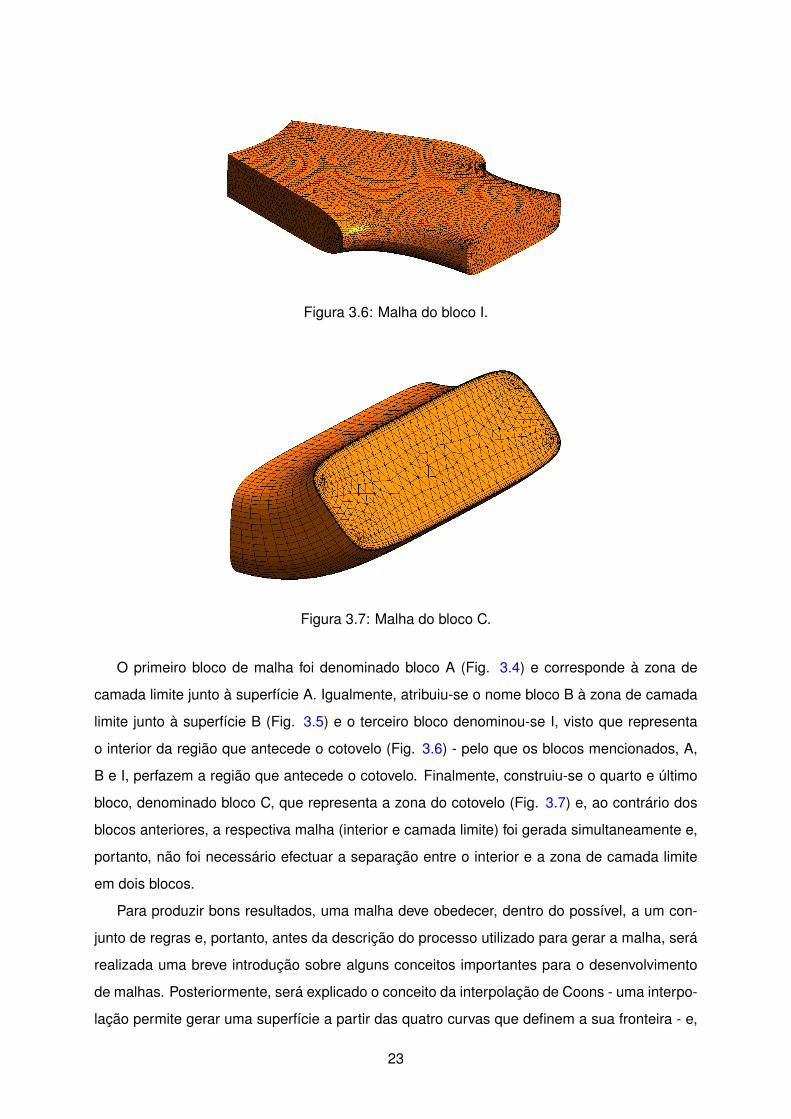
Figura 3.6: Malha do bloco I.
Figura 3.7: Malha do bloco C.
O primeiro bloco de malha foi denominado bloco A (Fig. 3.4) e corresponde à zona de
camada limite junto à superfície A. Igualmente, atribuiu-se o nome bloco B à zona de camada
limite junto à superfície B (Fig. 3.5) e o terceiro bloco denominou-se I, visto que representa
o interior da região que antecede o cotovelo (Fig. 3.6) - pelo que os blocos mencionados, A,
B e I, perfazem a região que antecede o cotovelo. Finalmente, construiu-se o quarto e último
bloco, denominado bloco C, que representa a zona do cotovelo (Fig. 3.7) e, ao contrário dos
blocos anteriores, a respectiva malha (interior e camada limite) foi gerada simultaneamente e,
portanto, não foi necessário efectuar a separação entre o interior e a zona de camada limite
em dois blocos.
Para produzir bons resultados, uma malha deve obedecer, dentro do possível, a um con-
junto de regras e, portanto, antes da descrição do processo utilizado para gerar a malha, será
realizada uma breve introdução sobre alguns conceitos importantes para o desenvolvimento
de malhas. Posteriormente, será explicado o conceito da interpolação de Coons - uma interpo-
lação permite gerar uma superfície a partir das quatro curvas que definem a sua fronteira - e,
23

em seguida, será explicado o método escolhido para representar a camada limite. Por último,
uma vez especificados os conceitos base, será descrita a metodologia utilizada na constru-
ção dos diversos blocos juntamente com uma breve secção sobre a evolução da malha, na
qual é abordada a sua evolução e alguns dos problemas encontrados ao longo da presente
dissertação.
3.1 Aspectos gerais sobre a geração de uma malha
A construção de uma boa malha constitui um elemento essencial para efectuar uma boa
análise do escoamento no Fluent. Habitualmente, utilizam-se programas comerciais para gerar
malhas de forma automática, porém, na presente dissertação pretende-se realizar uma opti-
mização, pelo que se considerou indispensável programar um algoritmo capaz de gerar geo-
metrias e malhas de acordo com os parâmetros pretendidos. Nas malhas existem dois tipos
de construção, malha estruturada e não-estruturada (Figs. 3.8 e 3.9, respectivamente). Nas
malhas estruturadas cada nó pode ser representado através dos respectivos índices (i , j , k ),
sendo os elementos quadriláteros, em duas dimensões, e hexaedros no caso tridimensional.
Figura 3.8: Ilustração do aspecto de uma malha estruturada.
Figura 3.9: Ilustração do aspecto de uma malha não-estruturada.
24

As malhas não-estruturadas não obedecem a um padrão. Isto significa que os nós na
vizinhança não podem ser facilmente identificados pelo seu índice, como no caso das malhas
estruturadas.
A principal vantagem das malhas estruturadas prende-se com a capacidade de extrair in-
formação relativa a cada nó com base nos respectivos índices, o que permite simplificar a
computação e, consequentemente, resulta numa poupança de recursos e tempo de cálculo.
Porém, nem sempre é possível criar uma malha estruturada num só bloco, i.e., em geometrias
complexas pode ser necessário recorrer à separação do espaço em blocos e, em seguida,
criar separadamente uma malha estruturada para cada bloco. Contudo, sempre que tal não é
possível, torna-se necessário utilizar malha não-estruturada.
Figura 3.10: Prisma quadrangular, triangular e pirâmide triangular - alguns dos elementos mais
utilizados em malhas.
As malhas não-estruturadas constituem normalmente o tipo de construção mais utilizado,
dado que a maioria dos casos estudados possuem geometrias muito complexas. Como é evi-
dente, a grande vantagem deste tipo de malha reside na facilidade de gerar a malha indepen-
dentemente do grau de complexidade da geometria; e, ao contrário das malhas estruturadas,
este tipo de malha pode utilizar não só elementos quadriláteros, como também, qualquer ele-
mento com três ou mais lados (em 2D) e, no caso tridimensional, tanto podem ser utilizados
prismas como pirâmides (Fig. 3.10).
No caso da construção de uma malha para um dado espaço, o primeiro passo consiste
na escolha da distribuição dos pontos nas fronteiras das várias superfícies que o definem.
Habitualmente, opta-se por colocar mais pontos onde existem maiores gradientes de pres-
são/velocidade no escoamento. Após a distribuição dos pontos nas fronteiras, procede-se à
geração da malha em cada superfície e, como visto anteriormente, pode ser utilizada ma-
lha estruturada, não-estruturada ou então uma combinação de ambas - no caso de ser uma
combinação dos dois tipos de malha, a malha denomina-se "híbrida”.
Finalmente, define-se o tipo de elementos tridimensionais a utilizar. Pelo que nos casos em
que a malha possui mais do que um tipo de elemento a malha denomina-se "mista”. Normal-
25

mente, este é um termo confundido com "híbrido” e, portanto, salienta-se que o termo malha
"mista” é relativo ao tipo de elementos utilizados, ao passo que, a definição "híbrida” refere-se
ao tipo de construção da malha [6].
Nesta dissertação, e de acordo com as práticas correntes, utilizaram-se malhas híbridas,
dada a dificuldade de conseguir gerar uma malha estruturada para a geometria do difusor.
Figura 3.11: Elementos tetraédricos deformados prejudicam a qualidade da solução da malha.
Por fim, o controlo de qualidade da malha considera-se indispensável, visto que uma malha
com má qualidade, tipicamente, produzirá maus resultados. Como tal, existe um conjunto de
princípios que devem ser respeitados. Para começar, as malhas devem ter uma aparência
regular e suave - ou seja, deve evitar-se a utilização de elementos deformados (Fig. 3.11);
e, por outro lado, deve-se utilizar um bom refinamento da malha - i.e. os elementos devem
ser suficientemente pequenos de modo a representar adequadamente o comportamento do
escoamento.
3.2 Interpolação de Coons
A interpolação de Coons, como o próprio nome indica, foi desenvolvida por Steve Coons.
Esta interpolação permite gerar uma superfície paramétrica a partir das quatro curvas que
delimitam a sua fronteira (Fig. 3.12).
Figura 3.12: Superfície definida a partir das quatro curvas compõem a respectiva fronteira.
26

Figura 3.13: Interpolação linear entre duas curvas opostas.
Figura 3.14: Interpolação linear das duas curvas restantes.
Figura 3.15: Interpolação linear do plano que contém os quatro vértices da fronteira da super-
fície.
27

Figura 3.16: Superfície resultante da aplicação da Eq. (3.4).
Para criar uma superfície p(u, v ) a partir das curvas da fronteira pu0(u), pu1(u), p0v (v ) e
p1v (v ), basta proceder à interpolação linear entre as curvas pu0(u) e pu1(u) que produz a
primeira superfície (Fig. 3.13), dada por
(1− v )pu0(u) + v pu1(u). (3.1)
Em seguida, do mesmo modo, procede-se à interpolação das duas curvas restantes p0v (v )
e p1v (v ) (Fig. 3.14), representada por
(1− u)pv0(v ) + u pv1(v ). (3.2)
Por fim, procede-se à modelação do plano que contém os pontos P01, P11, P00 e P10 (Fig.
3.15), dado por
(1− u)(1− v )P00 − u(1− v )P10 − (1− u)vP01 − u v P11. (3.3)
Por finalizar, procede-se à soma das duas primeiras superfícies e, em seguida, subtrai-se
a última. Após a conclusão deste processo, obtém-se a superfície pretendida (Fig. 3.16),
representada por
p(u, v ) = +(1− v )pu0(u) + v pu1(u)
+(1− u)pv0(v ) + u pv1(v )
−(1− u)(1− v )P00 − u(1− v )P10 − (1− u)v P01 − u v P11. (3.4)
3.3 Camada limite
Como já foi referido anteriormente, a obtenção de bons resultados depende da representa-
ção da zona junto às paredes. O primeiro ponto da malha, na direcção vertical, deve obedecer
28

à condição y+ < 1, de modo a garantir que este se encontra na sub-camada laminar - poste-
riormente será explicado o método utilizado para garantir esta condição. Por outro lado, como
o perfil de velocidade possui maiores variações junto à parede, é necessário assegurar que a
distribuição de pontos capta estas variações (Figs. 3.17 e 3.18).
Para garantir uma representação adequada dos fenómenos do escoamento distribuiram-se
vinte pontos sob a forma de potência de base k (Fig. 3.19), dada por
yi = k i−9, i = 0, 1, 2, ..., 19. (3.5)
Figura 3.17: Perfil de velocidade.
Figura 3.18: Perfil de velocidade sob efeito de um gradiente de pressão adverso.
Figura 3.19: Distribuição exponencial utilizada para representar a camada limite.
29

3.4 Geração de malha para o bloco A
A construção de uma malha pode ser separada nos seguintes passos:
• Escolha do volume a discretizar.
• Decomposição do volume nas superfícies que o definem.
• Escolha da distribuição dos nós nas fronteiras das superfícies.
• Geração da malha em cada superfície.
• Geração da malha no interior do volume.
O capítulo sobre a geometria do difusor aborda precisamente o primeiro e segundo passo
destas directivas, pelo que as restantes tarefas serão descritas neste capítulo.
Uma vez que as fronteiras da superfície A já foram construídas anteriormente, procede-se
à distribuição dos nós nas diversas fronteiras. Para tal, a cada fronteira atribui-se um valor,
Nc,i , com o número de nós que cada uma deve possuir. Como é evidente, os nós inicial e final
de cada curva sobrepõem-se com os nós das curvas adjacentes e, por conseguinte, o número
de nós da fronteira Nf ,i da superfície A1 é inferior ao somatório do número de nós de cada
curva, pelo que este último é calculado com base em
Nf ,i =n∑
i=1
Nc,i − n. (3.6)
Figura 3.20: Malha gerada para o bloco A com base no software vmsh2d [7].
Como nesta superfície não existem zonas críticas, utilizou-se uma distribuição linear dos
nós nas fronteiras e, em seguida, utilizou-se o algoritmo externo vmsh2d [7] para gerar uma
malha composta por elementos triangulares a partir das fronteiras bidimensionais da superfí-
cie. Após a produção da malha por parte do software, ficou completa a malha 2D da superfície
A (Fig. 3.20).
30
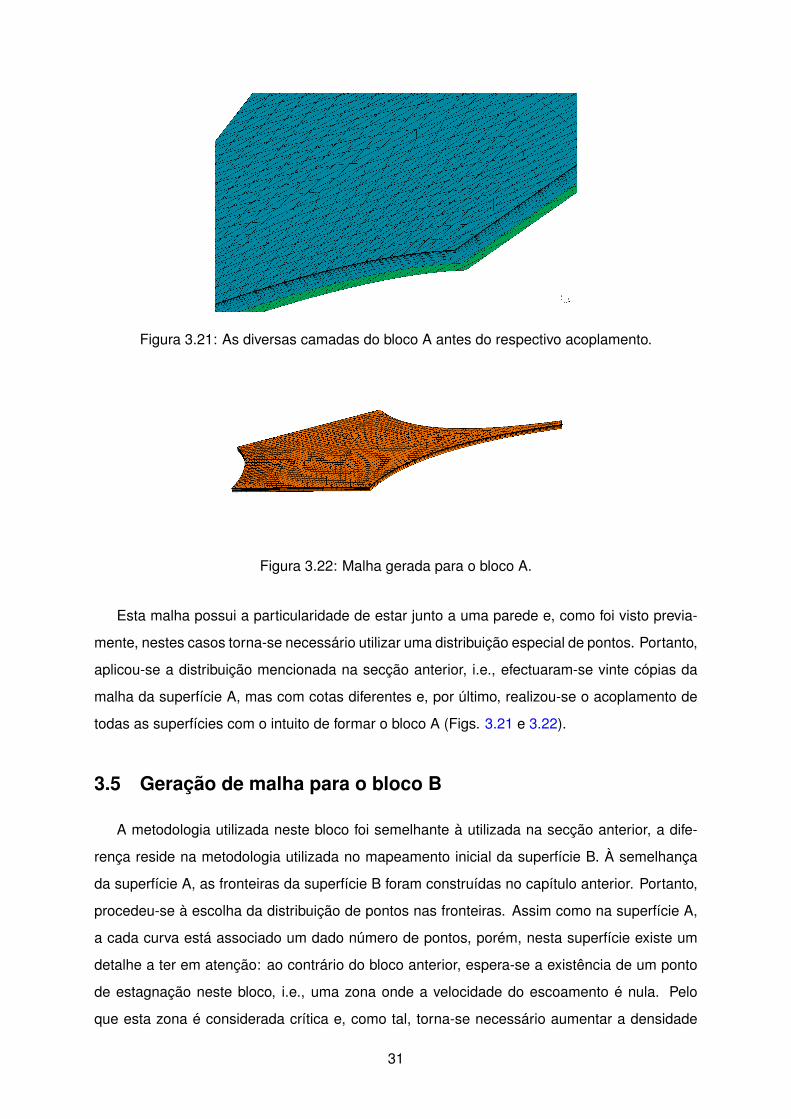
Figura 3.21: As diversas camadas do bloco A antes do respectivo acoplamento.
Figura 3.22: Malha gerada para o bloco A.
Esta malha possui a particularidade de estar junto a uma parede e, como foi visto previa-
mente, nestes casos torna-se necessário utilizar uma distribuição especial de pontos. Portanto,
aplicou-se a distribuição mencionada na secção anterior, i.e., efectuaram-se vinte cópias da
malha da superfície A, mas com cotas diferentes e, por último, realizou-se o acoplamento de
todas as superfícies com o intuito de formar o bloco A (Figs. 3.21 e 3.22).
3.5 Geração de malha para o bloco B
A metodologia utilizada neste bloco foi semelhante à utilizada na secção anterior, a dife-
rença reside na metodologia utilizada no mapeamento inicial da superfície B. À semelhança
da superfície A, as fronteiras da superfície B foram construídas no capítulo anterior. Portanto,
procedeu-se à escolha da distribuição de pontos nas fronteiras. Assim como na superfície A,
a cada curva está associado um dado número de pontos, porém, nesta superfície existe um
detalhe a ter em atenção: ao contrário do bloco anterior, espera-se a existência de um ponto
de estagnação neste bloco, i.e., uma zona onde a velocidade do escoamento é nula. Pelo
que esta zona é considerada crítica e, como tal, torna-se necessário aumentar a densidade
31

da malha nessa região, com o intuito de captar adequadamente os diversos fenómenos do
escoamento (Fig. 3.23).
Figura 3.23: Zona do bloco B onde é esperada a presença de um ponto de estagnação.
Após a distribuição dos pontos pelas fronteiras, procedeu-se à geração da malha na su-
perfície B e o processo escolhido baseou-se em:
• Definir o quadrilátero 2D que se pretende utilizar para representar o bloco B.
• Gerar a malha bidimensional do quadrilátero.
• Transformar a malha bidimensional gerada para 3D.
Figura 3.24: Malha 2D gerada para o quadrilátero.
O algoritmo [7] apenas gera malha em duas dimensões, pelo que foi necessário encontrar
uma geometria 2D que representasse B de um modo adequado. A geometria escolhida foi um
trapézio e, em seguida, foi gerada a respectiva malha (Fig. 3.24).
32

Figura 3.25: Malha 2D do quadrilátero aplicada sobre a superfície B1.
Para finalizar a geração da superfície do bloco B, projectou-se a malha anterior sobre a
superfície em causa. Para tal, aplicou-se a interpolação de Coons - dado que quatro curvas
constituem a fronteira da superfície B - i.e., aplicou-se a interpolação a cada nó do quadri-
látero e, em seguida, obteve-se o respectivo nó em 3D. Como é visível, a malha obtida fica
ligeiramente deformada dado que a metodologia utilizada para gerar a malha é apenas uma
aproximação (Fig. 3.25).
Assim como em A, é necessário utilizar uma distribuição de pontos que represente ade-
quadamente a camada limite, sendo que no caso anterior a direcção do vector normal à malha
foi trivial de calcular - o que não acontece neste bloco. Por este motivo, optou-se por calcu-
lar a normal através de uma média ponderada baseada nas áreas e normais dos elementos
adjacentes ao nó, dada por
vi =n∑
i=1
ui Ai
At. (3.7)
Figura 3.26: Malha do bloco B1 após a aplicação à superfície B da distribuição de pontos
associada à camada limite.
Finalmente, calcularam-se as coordenadas dos novos nós para cada uma das vinte cama-
das e, finalmente, procedeu-se à construção e reordenamento da malha, concluindo-se assim
33
o processo de construção da malha do bloco B (Fig. 3.26).
Figura 3.27: Zona de camada limite antes do cotovelo representada pelo conjunto das malhas
dos blocos A e B.
Ao juntar os blocos A e B, obtém-se a malha junto à parede para a zona que antecede
o cotovelo (Fig. 3.27) e, como é visível, ambos os blocos são compostos por malha não-
estruturada e constituídos apenas por prismas triangulares.
3.6 Geração de malha para bloco do Interior
Para a geração da malha do bloco interior, utilizou-se um processo de construção diferente
dos anteriores. Dada a existência de parte das superfícies que envolvem o interior, gerou-se
apenas malha para as superfícies em falta (Figs. 3.28 e 3.29).
Figura 3.28: Superfícies em falta necessárias para a geração da malha interior.
34

Figura 3.29: Malha gerada para as superfícies em falta para a geração da malha interior.
Figura 3.30: Elementos tetraédricos que compõem o interior da malha.
Figura 3.31: Bloco de malha que representa a zona que antecede o cotovelo, formado pela
união dos blocos A, B e I.
Em seguida, foi gerada a malha para o volume interior (Fig. 3.30) para completar o bloco
que antecede o cotovelo (Fig. 3.31). Para tal, utilizou-se o software NETGEN [8], que permite
gerar malha não-estruturada constituída apenas por elementos tetraédricos. O único input
35
necessário para o programa são as superfícies que definem o volume.
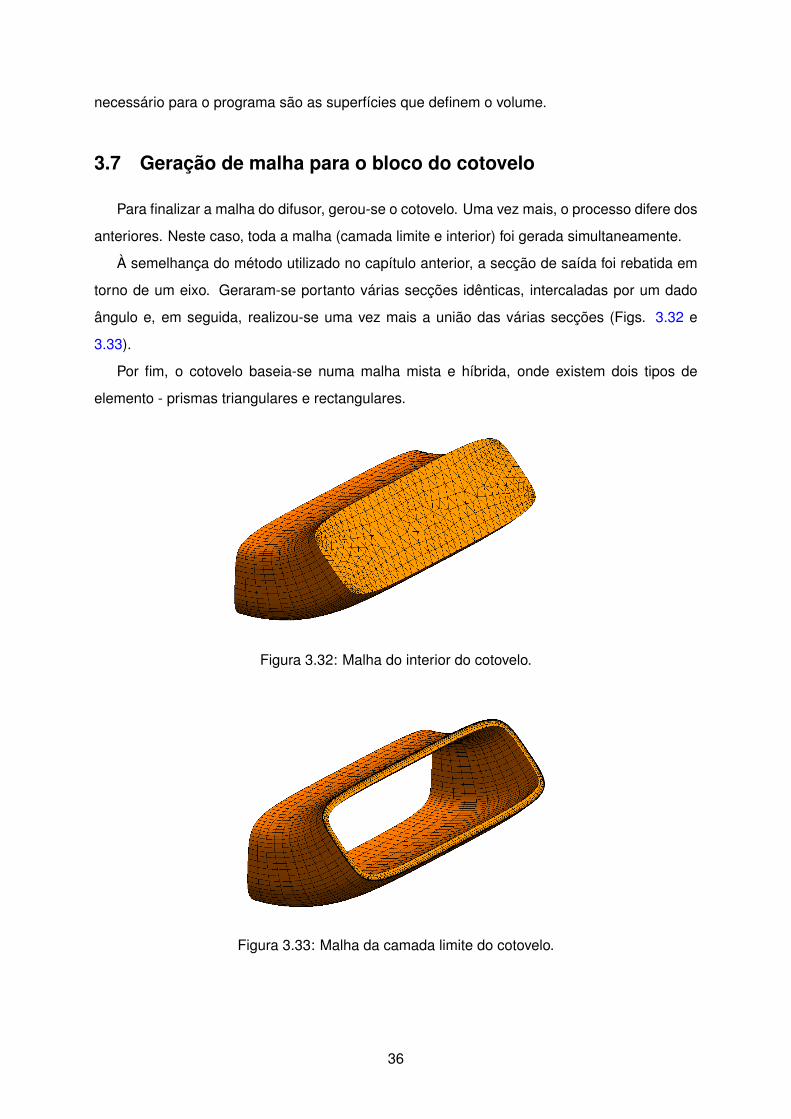
3.7 Geração de malha para o bloco do cotovelo
Para finalizar a malha do difusor, gerou-se o cotovelo. Uma vez mais, o processo difere dos
anteriores. Neste caso, toda a malha (camada limite e interior) foi gerada simultaneamente.
À semelhança do método utilizado no capítulo anterior, a secção de saída foi rebatida em
torno de um eixo. Geraram-se portanto várias secções idênticas, intercaladas por um dado
ângulo e, em seguida, realizou-se uma vez mais a união das várias secções (Figs. 3.32 e
3.33).
Por fim, o cotovelo baseia-se numa malha mista e híbrida, onde existem dois tipos de
elemento - prismas triangulares e rectangulares.
Figura 3.32: Malha do interior do cotovelo.
Figura 3.33: Malha da camada limite do cotovelo.
36

3.8 Evolução da malha
Embora as secções anteriores demonstrem de um modo simples como foi construída a
malha do difusor, esta constitui o produto de sucessivos aperfeiçoamentos. Nesta secção
serão abordados alguns dos problemas encontrados, assim como as soluções encontradas
para os resolver.
Figura 3.34: Primeira geometria [4] abordada na presente dissertação.
A presente dissertação começou com o estudo do artigo [4], que apresenta alguns resulta-
dos para quatro geometrias do presente difusor, mas não envolve uma optimização do difusor.
Por este motivo, o primeiro design utilizado foi fortemente influenciado pelas geometrias pre-
sentes no estudo anterior (Fig. 3.34).
O design final presente nesta dissertação não foi trivial. A primeira ideia consistiu num
difusor com uma secção rectangular na zona onde começa o cotovelo e com a saída elíptica
(Fig. 3.34). No entanto, a construção de uma malha com este formato não é a opção mais ele-
gante, além ser consideravelmente complicada - dado a forma pouco suave e implementação
complexa. Por este motivo, procurou-se uma solução alternativa. No decorrer desta demanda
surgiram múltiplas ideias, porém, a ideia que permaneceu foi a presente nesta dissertação
(Fig. 2.1).
Como é possível observar, a transição entre as zonas da cunha e saída tornou-se sua-
ve graças ao novo design utilizado. Apesar da geometria parecer simples, o processo para
encontrar a mesma foi moroso.
37

Figura 3.35: Presença de elementos muito deformados junto ao início do cotovelo na superfície
A.
Figura 3.36: Curvatura pouco suave da superfície B após tentativa de resolução do problema
presente na Fig. 3.35.
Um dos inúmeros problemas encontrados no decorrer da dissertação está relacionado
com o processo de construção dos blocos A e B. Após a conclusão do bloco A, surgiu uma
complicação na geração da malha da superfície B. Dado que o software utilizado [7] apenas
gera malha 2D, revelou-se impossível gerar a malha de B, visto esta ser tridimensional. Assim,
foi necessário encontrar uma alternativa. A solução encontrada consistiu na utilização de um
quadrilátero que representasse a superfície B da melhor forma. Portanto, por aproximações,
foi gerada malha para o quadrilátero e, em seguida, converteu-se a malha para 3D através da
interpolação de Coons. Como é visível na Fig. 3.25, o resultado obtido na malha foi muito
satisfatório.
Após a conclusão das malhas A e B, procedeu-se à respectiva união, encontrando-se um
novo problema. Verificou-se que alguns elementos de A eram demasiado esguios (Fig. 3.35)
38

e, portanto, para evitar resultados desadequados no futuro, foi procurada outra alternativa. O
método utilizado na resolução consistiu em forçar a superfície A a terminar com um ângulo
de 60o (Fig. 3.36). Esta solução originou, como nova complicação, uma superfície não suave
devido à descontinuidade da curvatura de uma curva pertencente à fronteira da superfície B.
Para resolver ambas as adversidades de um modo permanente, adicionaram-se dois elemen-
tos no final da superfície A, com tamanho característico dos elementos existentes nessa zona.
Por conseguinte, esta opção solucionou de um modo elegante ambos os contratempos.
Finalmente, grande parte do trabalho não apresentado nesta dissertação residiu na dificul-
dade de implementar o algoritmo em Python e conciliar o mesmo com o Fluent e, por outro
lado, salienta-se também a dificuldade de construir uma malha parametrizada capaz de avaliar
um domínio alargado de geometrias, com base em várias restrições.
39

40

Capítulo 4
Optimização do difusor
O software Fluent constitui uma ferramenta essencial para analisar o comportamento da
malha após a sua geração e, por outro lado, o algoritmo de evolução genética permite encon-
trar a geometria óptima. Assim sendo, na próxima secção será descrito metodologia utilizada
no Fluent e, em seguida, será descrito o algoritmo de evolução genética que permite determi-
nar a geometria óptima do difusor.
Como referido previamente, a presente dissertação tem como objectivo efectuar a primeira
optimização de um difusor para um novo tipo de turbina, ou seja, pretende-se descobrir a geo-
metria do difusor que permite aumentar o aproveitamento da energia das ondas. Para tal, a
avaliação do rendimento do difusor efectuou-se através do coeficiente de perdas λ [4], que não
é mais que um valor adimensional que permite avaliar a energia cinética perdida à saída do
difusor - sendo o coeficiente de perdas λ definido através de
L = ρ−1(p0i − ps), (4.1)
p0i = pi +ρV 2
i2
, (4.2)
λ =2LV 2
i. (4.3)
4.1 Cálculo do escoamento no difusor
O Fluent consiste num software que utiliza o método dos volumes finitos, capaz de mode-
lar uma gama alargada de problemas de engenharia. Tipicamente, os problemas envolvem
escoamentos, turbulência, transferência de calor ou mesmo reacções e alguns exemplos de
aplicações industriais são o escoamento em torno de um perfil alar ou a combustão num forno.
De forma a encontrar a geometria que permite optimizar o difusor, neste capítulo será abor-
dada a metodologia utilizada para avaliar o comportamento de cada modelo.
41

Como visto previamente, antes da utilização do Fluent gerou-se uma malha, bem como
alguns ficheiros para o Fluent; estes ficheiros denominados "journal”, contém informação re-
lativa a todos os comandos necessários para realizar cada teste de forma automática, e sem
intervenção do utilizador. Alguns comandos contidos num "journal” consistem , por exemplo,
nas instruções para escolher o modelo de turbulência, na atribuição de condições de fronteira
ou na escrita do relatório com os resultados.
A metodologia utilizada no Fluent pode ser separada em seis etapas:
• Arranque do Fluent.
• Leitura da malha.
• Setup do problema.
• Solução.
• Resultados.
• Relatórios.
Ao iniciar o Fluent escolhem-se algumas opções. Além dos "journals”, indicou-se que a
análise pretendida é tridimensional e sem intervenção do utilizador.
Em seguida, inseriu-se no Fluent a malha gerada no algoritmo de malha. Como visto pre-
viamente, vários blocos constituem a malha, os quais puderam ser agregados e reordenados
num único bloco com recurso ao Fluent.
Antes de prosseguir com a análise, efectuou-se uma validação geral da malha, ou seja,
verificou-se, por exemplo, se os elementos encontram-se organizados correctamente.
Em seguida, definiram-se as condições fronteira da malha, que podem ser de vários tipos:
• "Wall” - Parede do difusor.
• "Periodic” - Fronteira Periódica.
• "Velocity Inlet” - Velocidade à entrada do difusor.
• "Pressure Outlet” - Pressão estática à saída do difusor.
42

Figura 4.1: Condições de fronteira utilizadas.
Como é visível, a condição "Wall” corresponde à superfície do difusor e, como tal, é apli-
cada a condição de não escorregamento na mesma; na "Velocity Inlet” define-se a velocidade
do escoamento à entrada do difusor; e na zona "Pressure Outlet”, que corresponde à zona por
onde o escoamento sai do difusor, define-se o valor da pressão estática na saída do difusor;
finalmente, as fronteiras periódicas indicam ao Fluent as zonas de simetria do difusor.
As escolhas utilizadas para a definição do "Solver” foram baseadas no manual do Fluent [9].
Para começar, desprezou-se a equação da energia, escolheu-se o método "Pressure-Based”
e regime estacionário, uma vez que o escoamento em estudo é incompressível e adiabático.
Por outro lado, selecionou-se o modelo de turbulência k − ω SST, dado que este adequa-se
a escoamentos onde existem gradientes de pressão adversos, que constitui uma componente
de grande interesse na presente dissertação - visto que espera-se a existência de gradientes
de pressão adversos intensos na zona do cotovelo, ou em casos em que o escoamento à
entrada do difusor possui ângulos consideráveis. Para acelerar a convergência da solução,
foi utilizada nas primeiras 300 iterações uma discretização de primeira ordem, que foi depois
alterada para uma discretização upwind de segunda ordem, de modo a aumentar a precisão
dos resultados. Para o número máximo de iterações de segunda ordem, foi estipulado um
máximo de 700 iterações.
Para a solução selecionou-se o método de acoplamento da pressão com a velocidade e
escolheu-se o método SIMPLE visto que o regime em estudo é estacionário e incompressível.
Finalmente, escolheu-se o valor de 10−4 para os resíduos objectivo do Solver do Fluent.
No final da análise o Fluent cria um relatório com o valor da pressão na entrada do difusor.
43

4.2 Algoritmo de evolução genética
O Fluent permite avaliar o comportamento do escoamento no interior de cada geometria
do difusor e, em seguida, o algoritmo de evolução genética (Differential Evolution) determina a
geometria óptima do difusor.
O método utilizado nesta família encontra-se descrito de um modo intuitivo no Alg. 1.
Algorithm 1 Estrutura geral de um algoritmo de evolução genética [10].
1: Inicialização da população X (0)← [x1(0), ..., xm(0)]
2: g ← 0
3: Calcular [f (x1(0)), ..., f (xm(0))]
4: while a condição de paragem for falsa do
5: for i = 1, m do
6: yi ←gerar mutante (X (g))
7: zi ← crossover (xi (g), yi )
8: Calcular f (zi )
9: if f (zi ) < f (xi (g)) then
10: xi (g + 1)← zi
11: else
12: xi (g + 1)← xi (g)
13: end if
14: end for
15: g ← g + 1
16: end while
Após a primeira geração inicia-se um processo iterativo baseado em três fases:
• Mutação;
• Cruzamento;
• Seleção.
O processo de mutação do vector yi baseia-se em três vectores xri provenientes da última
geração, dado por
yi = xr1 + F · (xr2 − xr3) F ∈ [0, 2]. (4.4)
Em seguida, gera-se um vector zi através do cruzamento (crossover ) entre xi e yi , em que
xi constitui a espécie mais evoluída até ao momento, representado por
44

z ji =
y j
i se Uj < Cr ou j = k , j = 1, n
x ji
(4.5)
Finalmente segue-se a fase de seleção, na qual ocorre a comparação entre os valores
da função objectivo correspondentes a xi e zi e, em seguida, determina-se o indivíduo mais
evoluído.
O processo explicado previamente constitui a base do algoritmo, porém, a diferença entre
algoritmos reside nos métodos utilizados na mutação e cruzamento.
Na mutação é possível controlar a velocidade de convergência da solução, assim como
a diversidade da população, através das componentes da Eq. (4.4). Por exemplo, para xr1
pode-se escolher aleatoriamente um indivíduo dentro da geração anterior ou, então, escolher
o melhor. Por outro lado, os valores de xr2 e xr3 são sempre escolhidos aleatóriamente dentro
da última geração. Para controlar a diversidade do vector mutante utiliza-se também o parâ-
metro F , denominado factor de escala. Como é evidente, a escolha dos vários parâmetros
mencionados é crucial para a obtenção de bons resultados. Relativamente ao factor de escala
F , normalmente utiliza-se um valor entre 0.5 e 1.0 [11]. Para valores inferiores a este intervalo,
a velocidade de convergência tende a tornar-se demasiado elevada, embora isto seja uma
vantagem, existe uma desvantagem associada, que é a ocorrência de convergência prema-
tura. Dada a elevada velocidade de convergência, a função objectivo pode ficar confinada a
um mínimo/máximo local. Por outro lado, ao utilizar-se valores superiores ao intervalo anterior,
a convergência é excessivamente lenta e , consequentemente, o processo torna-se ineficiente
devido à necessidade de mais recursos. Portanto, os valores no intervalo referido são um bom
compromisso entre a qualidade da solução e a utilização de recursos. Finalmente, é neces-
sário escolher xr1 , onde é forçoso analisar cada caso individualmente. A escolha do melhor
indivíduo da geração permite o aumento da velocidade de convergência, mas pode também
conduzir a máximos/mínimos locais, visto reduzir a diversidade do vector. Por outro lado, a
escolha de um valor aleatório é mais indicada quando se pretende uma maior diversidade do
vector mutante [12].
O método de cruzamento constitui, como já referido, uma das componentes essenciais.
Existem múltiplas maneiras de fazer o cruzamento, sendo duas muito utilizadas o método
binomial e o método exponencial.
45

46

Capítulo 5
Análise de resultados
Para avaliar as características da geometria a optimizar foram realizadas as seguintes aná-
lises:
• Análise dos resultados para as geometrias do difusor abordadas em [4].
• Raio exterior (início do cotovelo), Re.
• Raio da cunha, Rc .
• Constante de arredondamento da saída, ks.
• Constante de arredondamento da cunha, kc .
A partir das análises efectuadas foi possível restringir o domínio em estudo e, em seguida,
estimar o resultado esperado após a conclusão da optimização. Posteriormente, extraiu-se
a geometria óptima resultante da optimização e realizaram-se diversas análises à influência
de outros parâmetros no coeficiente de perdas λ, assim como a comparação do desempenho
para geometrias diferentes. De um modo resumido, foram efectuadas as seguintes análises:
• Análise dos resultados obtidos após a optimização do difusor.
• Validação da malha do difusor.
• Análise da influência da altura da secção de saída, hs.
• Análise da influência do ângulo do escoamento,γ.
• Análise de secções elíptica e rectangular com a mesma área da secção de saída As.
• Análise da largura da secção de saída, Ls.
• Análise do ângulo do cotovelo, θc .
47

5.1 Análise preliminar
Na presente dissertação construiu-se uma malha parametrizada. Como visto previamente,
isto significa que a malha do difusor é gerada com base num conjunto de parâmetros. Modelou-
se a malha do difusor para um novo tipo de turbina, a turbina tetra-radial auto-rectificadora. No
entanto, o domínio de cada parâmetro em estudo é limitado pelas características físicas da
turbina, ou seja, alguns parâmetros, como o raio interior Ri , possuem uma dimensão fixa.
Parâmetros fixos:
• Raio total, Rt = 1450 mm.
• Raio interior, Ri = 450 mm.
• Altura do difusor, hd = 150 mm.
• Ângulo do cotovelo, θc = 45o.
• Ângulo do escoamento, γ = 0o.
• Limite físico da largura da secção de saída imposto pelo número de secções, Ls.
No entanto, existe uma série de parâmetros com alguma margem - os parâmetros-alvo da
optimização - para os quais é necessário definir, após a sua análise, o intervalo que é relevante
avaliar.
Parâmetros-alvo a optimizar:
• Raio exterior, Re.
• Constante de arredondamento da saída, ks.
• Raio da cunha, Rc .
• Constante de arredondamento da cunha, kc .
Para estudar o domínio de cada parâmetro analisaram-se os resultados referentes às geo-
metrias do difusor presentes em [4]. No qual utilizaram-se secções de saída do tipo rectan-
gular, elíptico, circular e trapezoidal para o difusor. Ao contrário da presente dissertação, o
estudo referido não envolveu uma optimização, tendo apenas sido elaborado o estudo de um
número reduzido de casos. Contudo, constitui uma referência importante dado que contem a
análise de algumas geometrias do difusor.
A Fig. 5.1 exibe cada uma das secções abordadas e a respectiva área As, onde a mesma
é definida adimensionalmente em função do raio interior Ri - sendo importante referir que no
estudo o parâmetro R3 corresponde ao raio interior. Por outro lado, o estudo contém a Fig.
5.2 onde é exibido o valor do coeficiente de perdas λ para cada tipo secção e também para
diferentes ângulos do escoamento γ. Com base na Fig. 5.2, conclui-se que o valor óptimo
48

do coeficiente de perdas λ obtém-se para um ângulo do escoamento γ nulo. Por outro lado,
constatou-se que a secção circular apresenta um coeficiente de perdas λ substancialmente
inferior aos restantes tipos de secção. Contudo esta conclusão é falaciosa, dado que ao traçar
a Fig. 5.3 com base nas Figs. 5.1 e 5.2 facilmente se observa a variação aproximadamente
linear do coeficiente de perdas λ com a área da secção de saída As. Portanto, a diferença sig-
nificativa do coeficiente de perdas λ da secção circular em relação às restantes é naturalmente
explicada pela disparidade das áreas da secção de saída As. Por conseguinte, concluiu-se que
o coeficiente de perdas λ é inversamente proporcional à área de secção de saída As e que o
coeficiente de perdas λ óptimo obtém-se para um ângulo do escoamento γ nulo.
Figura 5.1: Secções de saída do difusor abordadas em [4] com a respectiva área de saída As
definida adimensionalmente com base no raio interior Ri .
Figura 5.2: Coeficiente de perdas λ, definido como ε em [4], em função do ângulo do escoa-
mento γ para as diferentes geometrias do difusor presentes em [4].
49

0.3 0.4 0.5 0.6 0.7 0.80.4
0.5
0.6
0.7
0.8
0.9
As
λ
Figura 5.3: Coeficiente de perdas λ de cada secção para um ângulo do escoamento γ nulo em
função da respectiva área da secção de saída As
5.2 Análise do efeito do arredondamento da saída, ks
Para analisar a influência da constante de arredondamento da saída ks avaliaram-se quatro
geometrias, onde todos os parâmetros, excepto ks, permaneceram constantes.
É importante relembrar que um valor da constante ks = 0.7 produz uma secção elíptica
e, por outro lado, no caso extremo em que a constante ks adquire um valor unitário a secção
possui uma abertura de tal modo elevada que a mesma se assemelha a um rectângulo.
Ao analisar os resultados (Tab. 5.1 e Fig. 5.4), confirma-se a dedução efectuada na secção
anterior. Efectivamente, a secção rectangular apresenta um coeficiente de perdas λ menor
para uma secção com uma área de saída As maior, ou seja, a secção rectangular. Verifica-se
uma melhoria substancial com a variação de ks, que representa uma redução do coeficiente
de perdas λ na ordem de 0.14 para o domínio estudado. Contudo, não é possível afirmar ainda
que a secção rectangular constitui a melhor escolha, visto que as áreas da secção de saída
As para os casos abordados diferem.
50

Re [mm] ks Rc [mm] kc λ
1300 0.7 1050 0.7 0.720
1300 0.8 1050 0.7 0.666
1300 0.9 1050 0.7 0.621
1300 1.0 1050 0.7 0.587
Tabela 5.1: Coeficiente de perdas λ para diferentes valores da constante de arredondamento
da saída ks.
0.7 0.75 0.8 0.85 0.9 0.95 10.55
0.6
0.65
0.7
0.75
ks
λ
Figura 5.4: Coeficiente de perdas λ para diferentes valores da constante de arredondamento
da saída ks.
5.3 Análise do efeito do arredondamento da cunha, kc
A constante de arredondamento da cunha kc não possui influência directa na área da
secção de saída As, pelo que não foi possível realizar uma previsão do comportamento deste
parâmetro.
Após a análise dos resultados obtidos (Tab. 5.2 e Fig. 5.5) constatou-se que a secção
da cunha beneficia de uma secção elíptica. Contudo, a redução do coeficiente de perdas λ
traduz-se em aproximadamente 0.01 e, como tal, constitui uma melhoria pouco significativa
quando comparada com a melhoria obtida previamente com a constante ks.
51

Re [mm] ks Rc [mm] kc λ
1300 1.0 1050 0.7 0.587
1300 1.0 1050 0.8 0.590
1300 1.0 1050 0.9 0.591
1300 1.0 1050 1.0 0.592
Tabela 5.2: Coeficiente de perdas λ para diferentes valores da constante de arredondamento
da saída kc .
0.7 0.75 0.8 0.85 0.9 0.95 1
0.586
0.588
0.590
0.592
0.594
kc
λ
Figura 5.5: Coeficiente de perdas λ para diferentes valores da constante de arredondamento
da saída kc .
5.4 Análise do raio da cunha Rc
Devido às limitações que a malha possui, não foi possível estudar os casos extremos, tendo
sido analisado, no entanto, um vasto domínio do raio da cunha Rc .
Como é possível inferir a partir dos resultados obtidos (Tab. 5.3 e Fig. 5.6), a melhoria
ronda 0.01 e, portanto, constitui uma melhoria pouco significativa à semelhança da constante
kc .
52

Re [mm] ks Rc [mm] kc λ
1300 1.0 900 0.7 0.589
1300 1.0 1000 0.7 0.590
1300 1.0 1050 0.7 0.587
1300 1.0 1100 0.7 0.585
1300 1.0 1200 0.7 0.594
Tabela 5.3: Coeficiente de perdas λ para diferentes raios da cunha Rc .
900 950 1,000 1,050 1,100 1,150 1,2000.580
0.585
0.590
0.595
0.600
Rc [mm]
λ
Figura 5.6: Coeficiente de perdas λ para diferentes raios da cunha Rc .
5.5 Análise do raio exterior Re
Devido à influência do raio exterior Re no design geral do difusor não foi possível testar
o raio exterior Re sem alterar o raio da cunha Rc . De outro modo seriam produzidas malhas
com qualidade reduzida ou mesmo geometrias irrealistas e, portanto não foi possível variar
apenas Re e manter constantes os restantes parâmetros geométricos. Por este motivo, para
testar valores mais extremos de Re, adaptou-se Rc . Como visto previamente, o raio interior Ri
foi fixado em 450 mm e o raio total Rt em 1450 mm, levando a que o raio exterior Re possua
uma margem ampla. Porém, espera-se o valor óptimo de λ para um raio exterior Re próximo
do limite físico superior, dado que o aumento do raio exterior Re conduz ao aumento da área
da secção de saída As.
Com base nos resultados disponíveis (Tab. 5.4 e Fig. 5.7), verificou-se uma redução
53

acentuada do coeficiente de perdas λ com o aumento do raio exterior Re. No entanto, a taxa
de redução do coeficiente de perdas λ abranda gradualmente até ser atingido o coeficiente
de perdas λ óptimo. Após ser atingido o valor óptimo, a tendência inverte-se e o coeficiente
de perdas λ cresce. Este fenómeno pode ser explicado pelo estrangulamento do escoamento,
que está relacionado com o aumento do gradiente de pressão adverso associado à redução
da curvatura do cotovelo. A redução do coeficiente de perdas λ é substancial, visto que ocorre
uma diminuição do mesmo na ordem de 0.5 para o domínio testado.
Re [mm] ks Rc [mm] kc λ
900 1 650 0.7 1.089
1100 1 750 0.7 0.735
1200 1 900 0.7 0.628
1250 1 1050 0.7 0.595
1300 1 1050 0.7 0.587
1350 1 1050 0.7 0.606
Tabela 5.4: Coeficiente de perdas λ para diferentes raios exteriores Re.
1,100 1,150 1,200 1,250 1,300 1,3500.5
0.6
0.7
0.8
Re [mm]
λ
Figura 5.7: Coeficiente de perdas λ para diferentes raios exteriores Re.
5.6 Análise dos resultados obtidos na optimização do difusor
Nas análises anteriores concluiu-se que o coeficiente de perdas λ é substancialmente afec-
tado pela área da secção de saída As. Portanto, dado que o objectivo da presente dissertação
54

consiste em determinar o coeficiente de perdas λ mínimo, é forçoso maximizar As. Antes de
se realizar a optimização do difusor, procurou-se reduzir o domínio de cada parâmetro geo-
métrico, com o intuito de reduzir os recursos computacionais. Portanto, com base na análise
realizada previamente escolheu-se o seguinte domínio:
1200 < Re [mm] < 1350, (5.1)
900 < Rc [mm] < 1100, (5.2)
0.7 < ke < 1.0, (5.3)
0.7 < kc < 1.0. (5.4)
Em seguida, foram definidos os parâmetros do algoritmo de evolução genética "DE-opt”
[13]. Com base na análise feita anteriormente, não é esperada a existência de múltiplos mí-
nimos locais para a optimização de Re, ke e kc . Por outro lado, poderão existir vários na
optimização Rc . Contudo, a optimização de Rc e kc assume pouca relevância quando com-
parada com a primeira. Isto significa que a optimização foi separada em duas etapas: saída
(Re e ke) e cunha (Rc e kc), tendo sido utilizados valores típicos [11] que apresentam um bom
rácio entre velocidade de convergência e qualidade da solução:
• Parâmetro de crossover, Cr = 0.45.
• Factor de escala, F = 0.6.
• Número de indivíduos por geração, Np = 20.
• Número de gerações, Ng = 50.
• Esquema: DE/Best/1/Bin.
Com base nas análises anteriores, para a geometria óptima era expectável um raio exterior
Re próximo de 1300 mm, assim como uma constante de arredondamento da cunha ks próxima
da unidade, ou seja, uma secção rectangular. No caso da constante kc , registou-se uma
preferência por uma secção elíptica com uma abertura menor e, por último, relativamente a
Rc , não foi possível deduzir nada relevante.
Como é visível no resultado da optimização (Tab. 5.5), o resultado da optimização constitui
uma melhoria do coeficiente de perdas λ pouco significativa face à análise realizada anterior-
mente. Contudo, validou-se a preferência por uma secção rectangular na secção de saída
e uma secção elíptica na zona da cunha; por outro lado, o raio exterior Re aproximou-se do
valor analisado previamente; e, por último, a área da secção de saída As da geometria óptima
é semelhante à secção rectangular abordada em [4], contudo o coeficiente de perdas λ da
55

optimização apresenta uma melhoria considerável - o que não era de todo o esperado, uma
vez que para áreas da secção de saída As semelhantes, seriam esperados valores também
similares. Porém, este fenómeno será analisado com maior detalhe posteriormente.
Geometria Re [mm] ks Rc [mm] kc λ As
Óptima 1282 0.998 1002 0.759 0.571 0.338 R2i
Geometria rectangular [4] - - - - 0.75 0.373 R2i
Tabela 5.5: Resultados da geometria óptima e da geometria rectangular presente em [4].
5.7 Validação e estimativa do erro de discretização da malha
Para validar os resultados, confirmou-se, em primeiro lugar, que a distância adimensional à
parede dos primeiros pontos da malha obedecia à condição y+ < 1 (Fig. 5.8); depois validou-
se a convergência da solução (Fig. 5.9) - como é visível, os resíduos da solução convergiram
para o valor objectivo 10−4 ao final de aproximadamente 500 iterações; em seguida, analisou-
se a evolução da geometria óptima no decorrer da optimização (Figs. 5.10, 5.11, 5.12 e 5.13)
- sendo possível verificar que nas primeiras 10 gerações foi estudado um domínio alargado
de geometrias e que, nas últimas trinta gerações, houve pequenas diferenças nos valores da
função objectivo das espécies. Contudo, registaram-se sucessivas melhorias do coeficiente
de perdas λ mesmo depois da quadragésima iteração.
Figura 5.8: Valores da distância adimensional à parede y+ para a malha.
56
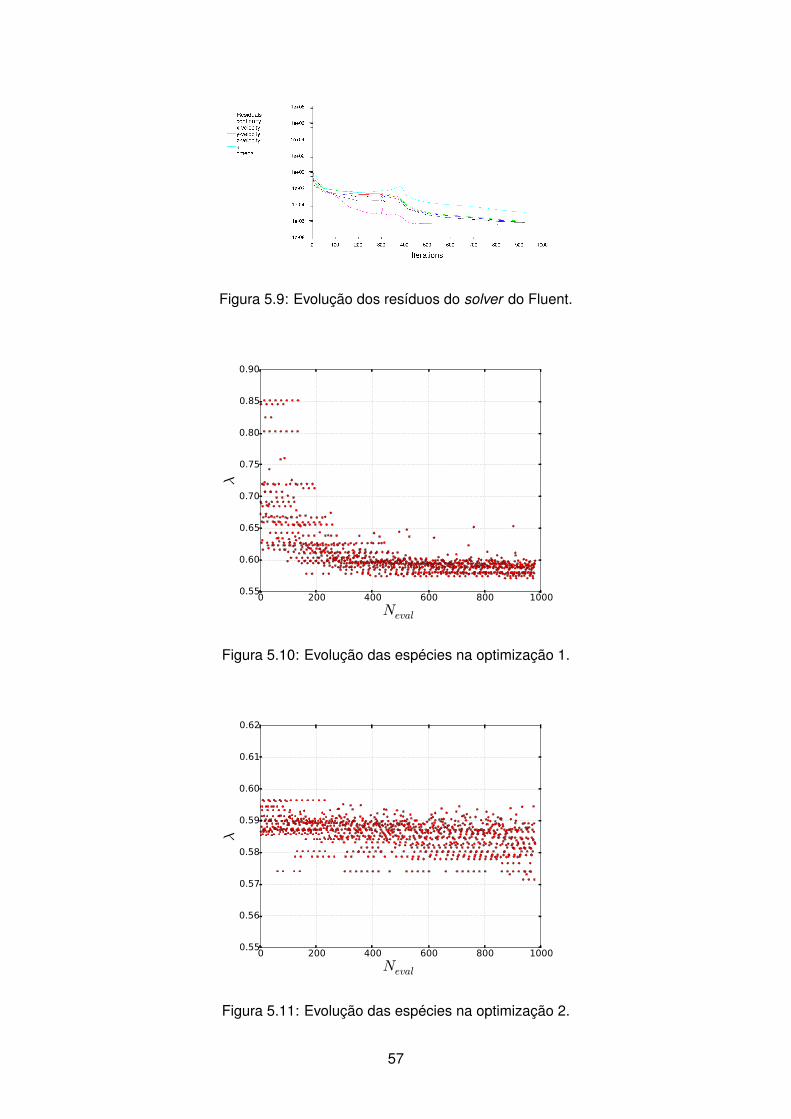
Figura 5.9: Evolução dos resíduos do solver do Fluent.
0 200 400 600 800 1000
Neval 0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
λ
Figura 5.10: Evolução das espécies na optimização 1.
0 200 400 600 800 1000
Neval 0.55
0.56
0.57
0.58
0.59
0.60
0.61
0.62
λ
Figura 5.11: Evolução das espécies na optimização 2.
57

0 200 400 600 800 1000
Neval 10-4
10-3
10-2
10-1
100
λ−λopt
λopt
Figura 5.12: Evolução das espécies na optimização 1 comparativamente ao valor óptimo
0 200 400 600 800 1000
Neval 10-4
10-3
10-2
10-1
100
λ−λopt
λopt
Figura 5.13: Evolução das espécies na optimização 2 comparativamente ao valor óptimo
Com base na Fig. 5.14, é possível verificar que a velocidade à saída do difusor é signifi-
cativamente inferior à da entrada. É também interessante salientar a existência de uma ligeira
aceleração do escoamento antes de este entrar no cotovelo e sucessivo início de separação
do escoamento. Por outro lado, constatou-se a presença de pontos de estagnação na zona
da cunha (Fig. 5.15). Na Fig. 5.16, é possível visualizar os efeitos do gradiente de pressão
adverso no escoamento à saída do difusor. Finalmente, é interessante observar que, quando
o ângulo do escoamento γ não é nulo, o ponto de estagnação não se situa na zona da fronteira
periódica (Fig. 5.17).
58

Figura 5.14: Variação da pressão dinâmica ao longo do difusor para um ângulo do escoamento
γ nulo.
Figura 5.15: Variação da pressão dinâmica ao longo do difusor para um ângulo do escoamento
γ nulo.
Figura 5.16: Variação da pressão dinâmica na secção de saída para um ângulo do escoamento
γ nulo.
59
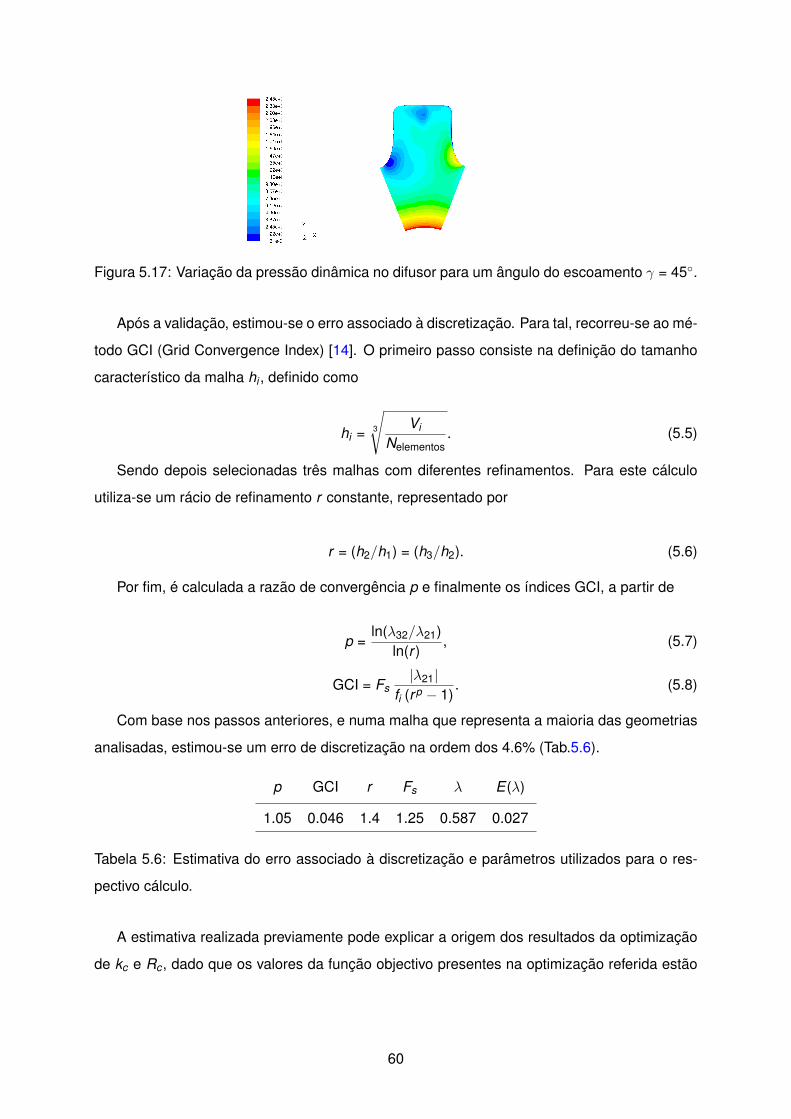
Figura 5.17: Variação da pressão dinâmica no difusor para um ângulo do escoamento γ = 45◦.
Após a validação, estimou-se o erro associado à discretização. Para tal, recorreu-se ao mé-
todo GCI (Grid Convergence Index) [14]. O primeiro passo consiste na definição do tamanho
característico da malha hi , definido como
hi = 3
√Vi
Nelementos. (5.5)
Sendo depois selecionadas três malhas com diferentes refinamentos. Para este cálculo
utiliza-se um rácio de refinamento r constante, representado por
r = (h2/h1) = (h3/h2). (5.6)
Por fim, é calculada a razão de convergência p e finalmente os índices GCI, a partir de
p =ln(λ32/λ21)
ln(r ), (5.7)
GCI = Fs|λ21|
fi (rp − 1). (5.8)
Com base nos passos anteriores, e numa malha que representa a maioria das geometrias
analisadas, estimou-se um erro de discretização na ordem dos 4.6% (Tab.5.6).
p GCI r Fs λ E(λ)
1.05 0.046 1.4 1.25 0.587 0.027
Tabela 5.6: Estimativa do erro associado à discretização e parâmetros utilizados para o res-
pectivo cálculo.
A estimativa realizada previamente pode explicar a origem dos resultados da optimização
de kc e Rc , dado que os valores da função objectivo presentes na optimização referida estão
60
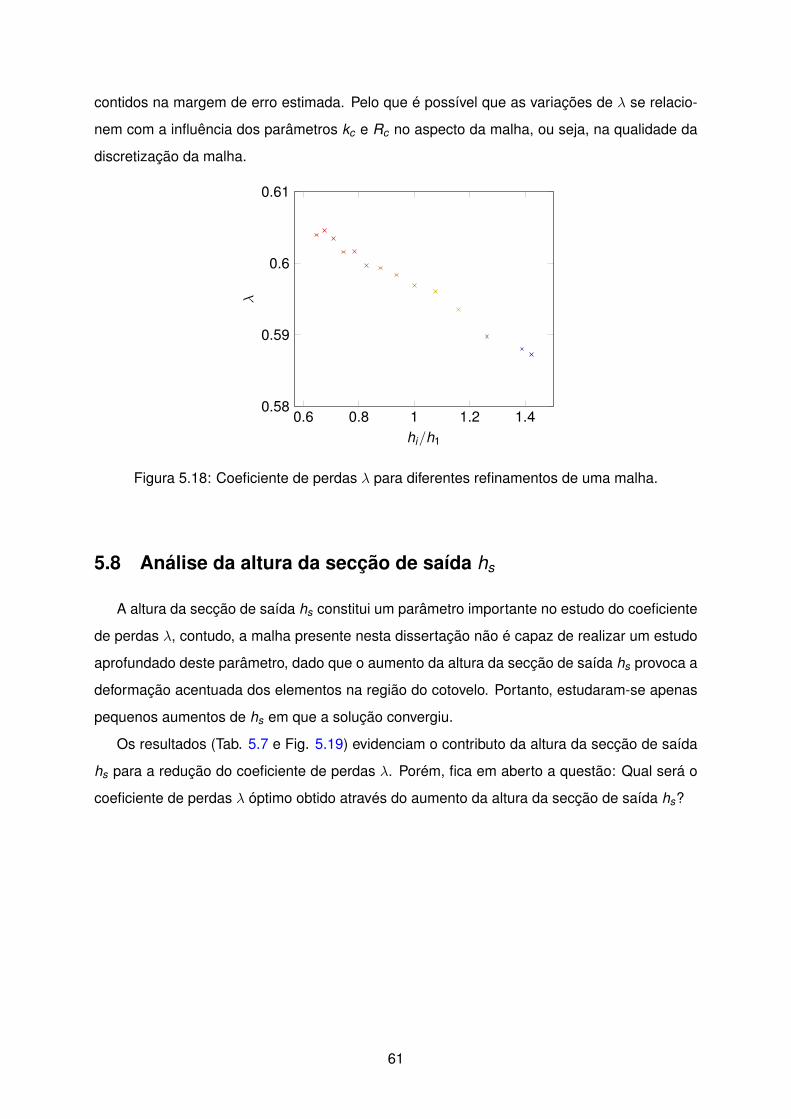
contidos na margem de erro estimada. Pelo que é possível que as variações de λ se relacio-
nem com a influência dos parâmetros kc e Rc no aspecto da malha, ou seja, na qualidade da
discretização da malha.
0.6 0.8 1 1.2 1.40.58
0.59
0.6
0.61
hi/h1
λ
Figura 5.18: Coeficiente de perdas λ para diferentes refinamentos de uma malha.
5.8 Análise da altura da secção de saída hs
A altura da secção de saída hs constitui um parâmetro importante no estudo do coeficiente
de perdas λ, contudo, a malha presente nesta dissertação não é capaz de realizar um estudo
aprofundado deste parâmetro, dado que o aumento da altura da secção de saída hs provoca a
deformação acentuada dos elementos na região do cotovelo. Portanto, estudaram-se apenas
pequenos aumentos de hs em que a solução convergiu.
Os resultados (Tab. 5.7 e Fig. 5.19) evidenciam o contributo da altura da secção de saída
hs para a redução do coeficiente de perdas λ. Porém, fica em aberto a questão: Qual será o
coeficiente de perdas λ óptimo obtido através do aumento da altura da secção de saída hs?
61

hs [mm] λ
150.0 0.587
157.5 0.580
165.0 0.573
172.5 0.569
180.0 0.563
187.5 0.554
195.0 0.545
202.5 0.541
210.0 0.535
217.5 0.528
Tabela 5.7: Coeficiente de perdas λ para diferentes alturas da secção de saída hs.
160 180 200 2200.52
0.54
0.56
0.58
hs [mm]
λ
Figura 5.19: Coeficiente de perdas λ para diferentes alturas da secção de saída hs.
5.9 Análise do ângulo do escoamento γ
Devido à análise efectuada previamente, utilizou-se um ângulo do escoamento γ nulo na
optimização. No entanto, é importante analisar diferentes ângulos do escoamento γ para com-
preender o impacto do mesmo no coeficiente de perdas λ.
Os resultados obtidos (Tab. 5.8 e Fig. 5.20) assemelham-se aos presentes na Fig. 5.2. Isto
é, para pequenos valores do ângulo do escoamento γ, o aumento do coeficiente de perdas λ
constitui uma melhoria pouco significativo. Por outro lado, quando o ângulo do escoamento γ
62

é grande, verifica-se o aumento substancial do coeficiente de perdas λ.
γ [◦] λ
0 0.587
5 0.587
10 0.588
15 0.594
20 0.599
25 0.605
30 0.614
35 0.635
40 0.658
45 0.704
Tabela 5.8: Coeficiente de perdas λ para diferentes ângulos do escoamento γ.
0 10 20 30 400.5
0.55
0.6
0.65
0.7
0.75
γ(◦)
λ
Figura 5.20: Coeficiente de perdas λ para diferentes ângulos do escoamento γ.
5.10 Comparação entre uma secção de saída elíptica e uma rec-
tangular
A influência de diferentes tipos de secção de saída no valor do coeficiente de perdas λ
constitui uma questão relevante abordada em [4]. Todavia, a análise efectuada no estudo
mencionado contém uma falha: as secções possuem diferentes áreas de saída As e, como já
63

foi analisado previamente, a área da secção de saída As influencia indubitavelmente o coefi-
ciente de perdas λ. Por este motivo, na presente secção será realizada a comparação entre
uma secção rectangular e outra elíptica com a mesma área de saída As. Dada a natureza da
malha, é impossível testar uma malha com secção de saída trapezoidal. Por outro lado, seria
possível gerar uma malha com secção de saída circular. Porém, esta última possuiria muito
pouca qualidade e, portanto, optou-se por efectuar apenas a comparação entre as geometrias
elíptica e rectangular.
Na construção da secção elíptica, calculou-se o aumento da altura de secção de saída hs,
necessário para igualar o valor da área de saída As da secção rectangular.
Como é visível (Tab. 5.9), o coeficiente de perdas λ para a secção rectangular apresenta
um valor significativamente inferior ao da secção elíptica. Uma vez mais, com base na análise
realizada anteriormente, este resultado não era de todo o esperado. Era expectável um coefi-
ciente de perdas λ semelhante para ambas as secções, dado que ambas possuem áreas de
secção de saída idênticas. Assim sendo, a origem deste fenómeno será analisada na próxima
secção.
elíptica rectangular
0.689 0.587
Tabela 5.9: Coeficiente de perdas λ para uma secção elíptica e uma rectangular com a mesma
área de saída As.
5.11 Análise da altura hs e largura da secção de saída Ls para uma
área As constante
Uma vez que o aumento da área da secção de saída As conduz à redução do coeficiente
de perdas λ, optou-se por maximizar a largura da secção de saída Ls. Porém, como visto
nas análises anteriores, existem geometrias com secções de saída As iguais e coeficientes de
perdas λ substancialmente diferentes. Portanto, é forçoso perceber qual a influência da largura
Ls e altura hs da secção de saída no coeficiente de perdas λ. Para tal, realizaram-se diversas
análises para uma secção com saída rectangular e com área As constante, isto é com hs e Ls
variáveis.
O resultado obtido (Tab. 5.10 e Fig. 5.21) demonstra de um modo claro que a largura da
saída Ls possui uma influência superior à altura da saída hs, o que pode ser justificado pela
existência de um gradiente de pressão adverso mais intenso na direcção vertical.
64

hs [mm] λ
150.0 0.587
157.5 0.629
165.0 0.687
172.5 0.736
180.0 0.789
187.5 0.842
Tabela 5.10: Coeficiente de perdas λ para diferentes alturas da secção de saída hs e com área
da secção de saída As constante.
150 160 170 180 190
0.6
0.7
0.8
hs(mm)
λ
Figura 5.21: Coeficiente de perdas λ para diferentes alturas da secção de saída hs e com área
da secção de saída As constante.
5.12 Análise do ângulo do cotovelo θc
Por fim, analisou-se a influência do ângulo do cotovelo θc em λ. Ao contrário de [4], onde
se utilizou um ângulo θc igual a 90o, na presente dissertação optou-se por utilizar um ângulo
do cotovelo θc igual a 45o, dado que não existe nenhuma restrição física que obrigue o difusor
a utilizar um ângulo tão elevado.
Com base nos resultados (Tab. 5.11 e Fig. 5.22), torna-se evidente que o coeficiente de
perdas λ é reduzido consideravelmente com a redução do ângulo do cotovelo θc .
65

θc [◦] λ
45 0.587
50 0.611
60 0.665
70 0.725
80 0.781
90 0.825
Tabela 5.11: Coeficiente de perdas λ para diferentes ângulos do cotovelo θc .
50 60 70 80 900.5
0.6
0.7
0.8
0.9
1
θc(◦)
λ
Figura 5.22: Coeficiente de perdas λ para diferentes ângulos do cotovelo θc .
66

Capítulo 6
Conclusões
No âmbito da presente dissertação, efectuou-se a primeira optimização do difusor para
uma turbina tetra-radial auto-rectificadora. Após a optimização, analisaram-se os resultados
da mesma, assim como de diversas geometrias, de modo a compreender a influência dos
diferentes parâmetros geométricos no coeficiente de perdas λ. Algumas destas análises foram
realizadas antes da optimização, dada a importância destas para a escolha do domínio dos
parâmetros-alvo da optimização. Em primeiro lugar, analisaram-se os resultados relativos ao
presente difusor em [4]. Com base em [4], constatou-se que é possível reduzir o coeficiente
de perdas λ através do aumento da área da secção de saída As. Por outro lado, deduziu-se
que o coeficiente de perdas λ óptimo é alcançado quando o ângulo do escoamento γ é nulo.
Em seguida, avaliou-se o impacto das constantes de arredondamento da saída ks e da
cunha kc , assim como dos raios exterior Re e da cunha Rc no coeficiente de perdas λ. Ao
analisar os parâmetros mencionados, deduziu-se que é preferível utilizar uma secção elíptica
na cunha e uma rectangular na saída, dado que esta maximiza a área de saída As da secção.
Por outro lado, ao estudar o raio exterior Re, retirou-se uma conclusão semelhante à anterior,
isto é, o raio exterior Re aproximou-se do limite superior, visto este permitir maximizar a área
da secção de saída As. Porém, é forçoso salientar que a partir de um certo raio exterior Re,
o coeficiente de perdas λ parou de decrescer e começou a aumentar, ainda que a área da
secção de saída As aumentasse. Este fenómeno pode ser explicado pelo estrangulamento do
escoamento, que advém do pequeno raio de curvatura do cotovelo.
Perante as análises efectuadas, concluiu-se também que a constante de arredondamento
da saída ks e o raio exterior Re são substancialmente importantes quando comparados com
a constante de arredondamento kc e com o raio Rc da cunha. Por esta razão, optou-se pela
separação da optimização em duas etapas. Em primeiro lugar, optimizaram-se ks e Re e, em
seguida, Rc e kc . O resultado obtido através do conjunto das optimizações apresentou uma
67

pequena melhoria(Tab. 5.5), quando comparado com as análises realizadas previamente.
Os resultados da optimização (Tab. 5.5) confirmaram que a secção de saída apresenta um
coeficiente de perdas λ menor quando a secção é rectangular. Por outro lado, o raio exterior
Re óptimo situa-se na ordem dos 1300 mm. Relativamente à análise de kc e Rc , confirmou-se
que a cunha beneficia de uma secção elíptica, visto que esta permite uma pequena redução
do coeficiente de perdas λ.
Infelizmente, não foi possível analisar detalhadamente a influência da altura da secção de
saída hs. No entanto, para o domínio estudado, constatou-se que o aumento da altura da
secção de saída hs provoca uma redução do coeficiente de perdas λ. Portanto, será neces-
sário no futuro estudar de um modo mais detalhado a influência deste parâmetro, de modo a
perceber qual o impacto deste na redução do coeficiente de perdas λ.
Ao analisar o ângulo do escoamento γ, deduziu-se que o aumento deste conduz ao au-
mento do coeficiente de perdas λ. Porém, a variação não é linear, isto é, para pequenos
ângulos do escoamento γ, o aumento de λ é pouco significativo. Por outro lado, quando o
ângulo do escoamento γ é grande, o aumento do coeficiente de perdas λ é substancial.
Uma questão essencial, que não se encontra presente em [4], consiste na comparação de
secções diferentes/iguais com a mesma área da secção de saída As. Na presente dissertação
efetuou-se a comparação de uma secção elíptica com uma rectangular. Com base nesta,
concluiu-se que a secção rectangular é mais vantajosa, dado que o coeficiente de perdas λ
apresenta um valor inferior. A conclusão retirada à primeira vista é pouco intuitiva, uma vez
que, com a análise realizada ao gráfico 5.3, seria expectável que secções com áreas de saída
As idênticas produzissem coeficientes de perdas λ similares. Portanto, para compreender a
diferença do coeficiente de perdas λ, analisou-se a influência da largura Ls e altura hs da
secção de saída, mantendo a área As constante. Nesta análise, concluiu-se que é possível
reduzir o coeficiente de perdas λ através da maximização da largura de saída Ls, ou seja,
embora o aumento de ambos os parâmetros permita a redução o coeficiente de perdas λ, o
aumento de Ls conduz a uma redução de λ superior à obtida com o aumento de hs. Dado que
existe um gradiente de pressão adverso mais intenso na direcção vertical. Por este motivo, a
secção rectangular constitui uma escolha mais vantajosa do que a elíptica e, eventualmente,
também melhor do que uma secção circular.
Por fim, analisou-se o impacto do ângulo do cotovelo θc . Ao contrário das diferentes geome-
trias do difusor presentes em [4], que utilizaram um ângulo de 90o, na presente optimização,
assim como nas diversas análises, utilizou-se um ângulo do cotovelo θc de 45o. Como foi
possível inferir após a análise detalhada deste parâmetro, a escolha de 45o foi a melhor opção,
68
visto que permitiu reduzir drasticamente o valor do coeficiente de perdas do difusor λ.
A presente dissertação permitiu realizar uma análise abrangente à influência dos diversos
parâmetros no coeficiente de perdas λ do difusor. Contudo, como trabalho futuro, sugere-se a
análise detalhada da altura da secção de saída hs, dado o potencial deste parâmetro para a
redução do coeficiente de perdas λ. Para uma nova análise, será necessária a reconstrução da
malha do cotovelo e, em seguida, a realização de uma nova optimização, desta vez baseada
na altura da secção de saída hs e no raio exterior Re.
Outra questão interessante a abordar no futuro é o método utilizado para gerar a malha
do bloco B. Como visto anteriormente, para a geração da mesma, o método utilizado foi uma
aproximação. Contudo, esta alteração deverá ter pouca importância, visto que a malha actual
apresenta boa qualidade.
Finalmente, para complementar a análise da zona da cunha, seria interessante analisar os
casos mais extremos destas geometrias, embora não seja esperado um coeficiente de perdas
inferior para estes casos.
69

70
Bibliografia
[1] A. F. O. Falcão, L. M. C. Gato, J. C. C. Henriques, Air turbine for applications in wave
energy conversion, World Patent No. WO/2014/185806 (2014).
[2] B. Drew, A. R. Plummer, M. N. Sahinkaya, A review of wave energy converter technology,
Proceedings of the Institution of Mechanical Engineers, Part A: Journal of Power and
Energy 223 (8) (2009) 887–902.
[3] A. F. O. Falcão, J. C. C. Henriques, Oscillating-water-column wave energy converters and
air turbines: A review, Renewable Energy 85 (2016) 1391–1424.
[4] A. F. O. Falcão, L. M. C. Gato, J. C. C. Henriques, J. E. Borges, B. Pereiras, F. Castro, A no-
vel twin-rotor radial-inflow air turbine for oscillating-water-column wave energy converters,
Energy 93 (2015) 2116–2125.
[5] Y. Kumar, Y. Srivastava, S. K. Bajpai, A. K. Kumar, Development of cad algorithms for
bezier curves/surfaces independent of operating system, WSEAS Transactions on Com-
puters (6).
[6] T. J. Baker, Mesh generation: Art or science?, Progress in Aerospace Sciences 41 (1)
(2005) 29–63.
[7] J. C. C. Henriques, Vmesh2d: A two-dimensional triangular mesh generator. Internal Re-
port, IST. 2012.
[8] J. Schöberl, Netgen an advancing front 2d/3d-mesh generator based on abstract rules,
Computing and visualization in science 1 (1) (1997) 41–52.
[9] Fluent incorporated. Fluent 6.3 user’s guide, 2006.
[10] D. Zaharie, Differential evolution from theoretical analysis to practical insights, in: Proce-
eding of 19th International Conference on Soft Computing, Brno, Czech Republic, 2013,
pp. 26–28.
71

[11] R. Gämperle, S. D. Müller, P. Koumoutsakos, A parameter study for differential evolution,
Advances in intelligent systems, fuzzy systems, evolutionary computation 10 (2002) 293–
298.
[12] S. Das, P. N. Suganthan, Differential Evolution: a survey of the state-of-the-art, Evolutio-
nary Computation, IEEE Transactions on 15 (1) (2011) 4–31.
[13] J. C. C. Henriques, DE-Opt: A Differential Evolution algorithm. Internal Report, IST. 2012.
[14] M. S. M. Ali, C. J. Doolan, V. Wheatley, Grid convergence study for a two-dimensional
simulation of flow around a square cylinder at a low reynolds number, in: 7th International
Conference on CFD in the Minerals and Process Industries CSIRO, C. Doolan and V.
Wheatley, eds., Melbourne, Australia, Dec, 2009, pp. 9–11.
72