pre calculus
DESCRIPTION
precalculus textbookTRANSCRIPT

Precalculus


Precalculus
David H. CollingwoodDepartment of Mathematics
University of Washington
K. David PrinceMinority Science and Engineering Program
College of EngineeringUniversity of Washington
September 4, 2006

ii
Copyright c�
2003 David H. Collingwood and K. David Prince. Permission isgranted to copy, distribute and/or modify this document under the terms of theGNU Free Documentation License, Version 1.1 or any later version published bythe Free Software Foundation; with no Invariant Sections, with no Front-Cover,and with no Back-Cover Texts. A copy of the license is included in the sectionentitled “GNU Free Documentation License”.

Author Note
For most of you, this course will be unlike any mathematics course youhave previously encountered. Why is this?
Learning a new languageColleges and universities have been designed to help us discover, shareand apply knowledge. As a student, the preparation required to carry outthis three part mission varies widely, depending upon the chosen field ofstudy. One fundamental prerequisite is fluency in a “basic language”;this provides a common framework in which to exchange ideas, care-fully formulate problems and actively work toward their solutions. Inmodern science and engineering, college mathematics has become this“basic language”, beginning with precalculus, moving into calculus andprogressing into more advanced courses. The difficulty is that collegemathematics will involve genuinely new ideas and the mystery of thisunknown can be sort of intimidating. However, everyone in this coursehas the intelligence to succeed!
Is this course the same as high school Precalculus?There are key differences between the way teaching and learning takesplace in high schools and universities. Our goal is much more than justgetting you to reproduce what was done in the classroom. Here are somekey points to keep in mind:
� The pace of this course will be faster than a high school class inprecalculus. Above that, we aim for greater command of the ma-terial, especially the ability to extend what we have learned to newsituations.
� This course aims to help you build the stamina required to solvechallenging and lengthy multi-step problems.
� As a rule of thumb, this course should on average take 15 hoursof effort per week. That means that in addition to the 5 classroomhours per week, you would spend 10 hours extra on the class. Thisis only an average and my experience has shown that 12–15 hours
iii

iv
of study per week (outside class) is a more typical estimate. In otherwords, for many students, this course is the equivalent of a half-time job!
� Because the course material is developed in a highly cumulativemanner, we recommend that your study time be spread out evenlyover the week, rather than in huge isolated blocks. An analogy withathletics is useful: If you are preparing to run a marathon, you musttrain daily; if you want to improve your time, you must continuallypush your comfort zone.
Prerequisites
This course assumes prior exposure to the “mathematics” in Chapters1-12; these chapters cover functions, their graphs and some basic exam-ples. This material is fully developed, in case you need to brush up on aparticular topic. If you have never encountered the concept of a function,graphs of functions, linear functions or quadratic functions, this coursewill probably seem too advanced. You are not assumed to have takena course which focuses on mathematical problem solving or multi-stepproblem solving; that is the purpose of this course.
Internet
There is a great deal of archived information specific to this course thatcan be accessed via the World Wide Web at the URL address
http://www.math.washington.edu/˜m120
Why are we using this text?
Prior to 1990, the performance of a student in precalculus at the Univer-sity of Washington was not a predictor of success in calculus. For thisreason, the mathematics department set out to create a new course witha specific set of goals in mind:
� A review of the essential mathematics needed to succeed in calculus.
� An emphasis on problem solving, the idea being to gain both experi-ence and confidence in working with a particular set of mathemati-cal tools.
This text was created to achieve these goals and the 2004-05 academicyear marks the eleventh year in which it has been used. Several thou-sand students have successfully passed through the course.

v
Notation, Answers, etc.
This book is full of worked out examples. We use the the notation “Solu-tion.” to indicate where the reasoning for a problem begins; the symbol
�
is used to indicate the end of the solution to a problem. There is a Tableof Contents that is useful in helping you find a topic treated earlier inthe course. It is also a good rough outline when it comes time to studyfor the final examination. The book also includes an index at the end.Finally, there is an appendix at the end of the text with ”answers” to mostof the problems in the text. It should be emphasized these are ”answers”as opposed to ”solutions”. Any homework problems you may be asked toturn in will require you include all your work; in other words, a detailedsolution. Simply writing down the answer from the back of the text wouldnever be sufficient; the answers are intended to be a guide to help insureyou are on the right track.
How to succeed in Math 120.
Most people learn mathematics by doing mathematics. That is, you learnit by active participation; it is very unusual for someone to learn the ma-terial by simply watching their instructor perform on Monday, Wednes-day, and Friday. For this reason, the homework is THE heart of thecourse and more than anything else, study time is the key to successin Math 120. We advise 15 hours of study per week, outside class.Also, during the first week, the number of study hours will probably beeven higher as you adjust to the viewpoint of the course and brush upon algebra skills.
Here are some suggestions: Prior to a given class, make sure you havelooked over the reading assigned. If you can’t finish it, at least look it overand get some idea of the topic to be discussed. Having looked over thematerial ahead of time, you will get FAR MORE out of the lecture. Then,after lecture, you will be ready to launch into the homework. If you followthis model, it will minimize the number of times you leave class in a daze.In addition, spread your study time out evenly over the week, rather thanwaiting until the day before an assignment is due.
Acknowledgments
The efforts of several people have led to numerous changes, correctionsand improvements. We want to specifically thank Laura Acuna, PatrickAverbeck, Jim Baxter, Sandi Bennett, Daniel Bjorkegren, Cindy Burton,Michael D. Calac, Roll Jean Cheng, Jerry Folland, Dan Fox, Grant Gal-braith, Peter Garfield, Richard J. Golob, Joel Grus, Fred Kuczmarski,Julie Harris, Michael Harrison, Teri Hughes, Ron Irving, Ian Jannetty,Mark Johnson, Michael Keynes, Don Marshall, Linda Martin, Patrick

vi
Perkins, Lisa Peterson, Ken Plochinski, Eric Rimbey, Tim Roberts, AaronSchlafly, David Schneider, Marilyn Stor, Lukas Svec, Sarah Swearinger,Steve Tanner, Paul Tseng, and Rebecca Tyson. I am grateful to everyonefor their hard work and dedication to making this a better product forour students.
The Minority Science and Engineering Program (MSEP) of the Col-lege of Engineering supports the development of this textbook. It is alsoauthoring additional materials, namely, a student study guide and aninstructor guide. MSEP actively uses these all of these materials in itssummer mathematics program for freshman pre-engineers. We want tothank MSEP for its contributions to this textbook.
We want to thank Intel Corporation for their grant giving us an ”Inno-vation in Education” server donation. This computer hardware is usedto maintain and develop this textbook.
CommentsSend comments, corrections, and ideas to [email protected] [email protected].

Preface
Have you ever noticed this peculiar feature of mathematics: When youdon’t know what is going on, it is really hard, difficult, and frustrating.But, when you know what is going on, mathematics seems incrediblyeasy, and you wonder why you had trouble with it in the first place!
Here is another feature of learning mathematics: When you are strug-gling with a mathematical problem, there are times when the answerseems to pop out at you. At first, nothing is there, then very suddenly,in a flash, the answer is all there, and you sit wondering why you didn’t“see” the solution sooner. We have a special name for this: It’s the “A-Ha!” experience. Often the difficulty you have in studying mathematicsis that the rate at which you are having an A-Ha! experience might be solow that you get discouraged or, even worse, you give up studying math-ematics altogether. One purpose of this course is to introduce you tosome strategies that can help you increase the rate of your mathematicalA-Ha! experiences.
What is a story problem?
When we ask students if they like story problems, more often than not,we hear statements like: “I hate story problems!” So, what is it aboutthese kinds of problems that causes such a negative reaction? Well,the first thing you can say about story problems is that they are mostlymade up of words. This means you have to make a big effort to readand understand the words of the problem. If you don’t like to read, storyproblems will be troublesome.
The second thing that stands out with story problems is that theyforce you to think about how things work. You have to give deep thoughtto how things in the problem relate to each other. This in turn means thatstory problems force you to connect many steps in the solution process.You are no longer given a list of formulas to work using memorized steps.So, in the end, the story problem is a multi-step process such that the“A-Ha!” comes only after lots of intense effort.
All of this means you have to spend time working on story problems.It is impossible to sit down and spend only a minute or two workingeach problem. With story problems, you have to spend much more timeworking toward a solution, and at the university, it is common to spend
vii

viii
an hour or more working each problem. So another aspect of workingthese kinds of problems is that they demand a lot of work from you, theproblem solver.
We can conclude this: What works is work! Unfortunately, there isno easy way to solve all story problems. There are, however, techniquesthat you can use to help you work efficiently. In this course, you willbe presented with a wide range of mathematical tools, techniques, andstrategies that will prepare you for university level problem solving.
What are the BIG errors?
Before we look at how to make your problem solving more efficient, let’slook at some typical situations that make problem solving inefficient. Ifyou want to be ready for university level mathematics, we are sure youhave heard somewhere: “You must be prepared!” This means you needto have certain well-developed mathematical skills before you reach theuniversity. We would like to share with you the three major sources oferrors students make when working problems, especially when they areworking exam problems. Every time we sit down and review solutionswith a student who has just taken an exam, and who has lost a lot ofpoints in that exam, we find errors falling pretty much into three cate-gories, and these errors are the major cause of inefficient mathematicalproblem solving.
The first type of error that loses points is algebra. This is an error ofnot knowing all of the algebraic rules. This type of error also includesmistakes in the selection and use of mathematical symbols. Often, dur-ing the problem solving process, you are required to introduce math-ematical symbols. But, without these symbols, you cannot make anyfurther progress. Think of it this way: Without symbols, you cannot doany mathematics involving equations!
The second error we see in problem solving has to do with visualiza-tion. In this case, we’re talking about more than the graphics you canget from a calculator. Graphing and curve sketching are very importantskills. But, in doing story problems, you might find it almost impossi-ble to create a solution without first drawing a picture1 of your problem.Thus, by not drawing a good picture of the problem, students get stuckin their exams, often missing the solution to a problem entirely.
Finally, the third big source of error is not knowing mathematical def-initions. Actually, this is a huge topic, so we will only touch on some ofthe main features of this kind of error. The key thing here is that by notknowing mathematical definitions, it becomes very hard to know what todo next in a multi-step solution to a story problem.
1Whenever we talk about a picture of your problem, we mean not just the drawingitself. In this case, the picture must include the drawing and the labels which clearlysignify the quantities related to your problem.

ix
Here is what it all boils down to: Mathematical definitions, for themost part, provide little cookbook procedures for computing or measuringsomething. For example, if you did not know the mathematical definitionof “speed,” you would not know that to measure speed, you first measureyour distance and you simultaneously measure the time it takes to coverthat distance. Notice this means you have two measuring instrumentsworking at the same time. The second thing you must do, according tothe definition of speed, is divide the distance you measured by the timeyou measured. The result of your division is a number that you will callspeed. The definition is a step-by-step procedure that everyone agreesto when talking about “speed.” So, it’s easy to understand that if youare trying to solve a story problem requiring a speed computation andyou did not know the definition or you could not remember the definitionof speed, you are going to be “stuck” and no further progress will bepossible!
What does all of this mean for you? As you study your mathematics,make sure you are the best you can be in these three areas: Algebra, Vi-sualization, and Definitions. Do a little algebra every day. Always draw apicture to go with all your problems. And, know your mathematical def-initions without hesitation. Do this and you will see a very large portionof your math errors disappear!
Problem Solving Strategies
This topic would require another book to fully develop. So, for now, wewould like to present some problem solving ideas you can start usingright away.
Let’s look now at a common scenario: A student reads a story problemthen exclaims, maybe with a little frustration: “If I only had the formula,I could solve this problem!” Does this sound familiar? What is going onhere, and why is this student frustrated? Suppose you are this student.What are you actually trying to do? Let’s break it down. First, you arereading some descriptive information in words and you need to translatethis word information into symbols. If you had the symbolic information,you would be in a position to mathematically solve your problem rightaway.
Unfortunately, you cannot solve anything without first translatingyour words into symbols. And, going directly from words to symbols isusually very difficult! So, here we are looking for some alternative ap-proach for translating words into symbols. Figure 1 is the answer to thisproblem solving dilemma.
A lot is going on in Figure 1. Let’s consider some of the main featuresof this diagram. First, it is suggesting that you are dealing with informa-tion in three different forms: Words, Pictures, and Symbols. The arrowsin this diagram suggest that in any problem solving situation, you are

x
Words
Pictures SymbolsPSfrag replacements
-axis
-axis
-axis
Figure 1: Problem solving as a transformation process.
actually translating information from one form to another. The arrowsalso suggest that there are alternative paths you can take to get from oneform to another! This is a very, very important point: the idea that thereis more than one way to get from words to symbols.
Let’s rewind this discussion: You’re reading a story problem. But,now, before giving any thought to what your formula is, that is, beforeworrying about your symbolic information, you grab a blank sheet of pa-per and start drawing a picture of your problem. And, to your pictureyou add symbols denoting the quantities you need in your problem. Atthis point in your problem solving, you are not trying to write any equa-tions; you are only trying to see what your problem looks like. You arealso concentrating on another extremely important step: Deciding whatsymbols to use in your problem!
Now you have a good picture of your problem. It shows not only whatthe problem looks like, but symbolically shows all the problem’s variablesand constants. You can start using this information to mathematicallymodel your problem. The process of creating a mathematical model is ac-tually nothing more than the arrow in the diagram going from pictures tosymbols. Mathematical modeling is the jump you make from the visualinformation you have created to information contained in your formulas.
Let’s summarize the problem solving process. You start with a de-scription of a problem that is presented to you mainly in the form ofwords. Instead of trying to jump directly from words to symbols, youjump from words to pictures. Once you have a good picture, you jumpfrom pictures to symbols. And, all the time, you are relying on mathe-matical definitions as you interpret the words of your problem; on visu-alization techniques as you draw pictures related to your problem; and,on your algebra skills as you are formulating the equations you need to

xi
solve your problem.There is one final thing to notice about the diagram in this section. All
of this discussion so far deals with the situation where your direction isfrom
Words � � Pictures � � Symbols �
But when you study the diagram you see that the arrows go both ways!So, we will leave you with this to think about: What does it mean, withinthe context of problem solving, when you have
Symbols � � Pictures � � Words?
An Example.Here is a worked example that is taken from a typical homework assign-ment for Section 1.1 of this book. See if you can recognize the multitudeof steps needed to arrive at the equations that allow us to compute asolution. That is, try to identify the specific way in which information isbeing transformed during the problem solving process.
This problem illustrates the principle used to make a good “squirtgun”. A cylindrical tube has diameter 1 inch, then reduces todiameter � . The tube is filled with oil and piston � moves to theright 2 in/sec, as indicated. This will cause piston � to move tothe right � in/sec. Assume the oil does not compress; that meansthe volume of the oil between the two pistons is always the same.
oil
A B
2 in/sec m in/sec
PSfrag replacements
-axis
-axis
-axis
1. If the diameter of the narrow part of the tube is �� inch, whatis the speed of piston � ?
2. If � moves insec, what is the diameter of the narrow part of
the tube?
Solution.The first thing to do with any story problem is to draw a picture of theproblem. In this case, you might re-sketch the picture so that it looks3-dimensional: See Figure 2. As you draw, add in mathematical symbolssignifying quantities in the problem.
The next thing is to clearly define the variables in your problem:

xii
dB
xB
xA
dA
Volume Entering Cylinder B.
Volume Leaving Cylinder A.
Piston A.
Piston B.PSfrag replacements
-axis
-axis
-axis
Figure 2: A re-sketch of the original given figure.
1. Let ��� and ��� stand for the change in volumes as piston A moves tothe right.
2. Let ��� and ��� represent the diameters of each cylinder.
3. Let ��� and �� represent the radii of each cylinder.
4. Let �� and �� stand for the speeds of each piston.
5. Let �� and �� stand for the distance traveled by each piston.
Now that you have some symbols to work with, you can write the givendata down this way:
1. ������ inchessecond.
2. ����� ��� inch.
After you have studied this problem for a while, you would write downsome useful relationships:
1. The volume of any cylinder is
������� ���
where � is the radius of the cylinder, and�
is its height or length.From this, you can derive the volume of a cylinder in terms of itsdiameter, � :
��� � � � ��� �

xiii
2. “Distance” � “Rate” � “Time”. In terms of this problem, you wouldwrite
� ����where is the distance your piston moves, and is the speed of thepiston’s motion.
Now you are in a position to create a mathematical model that de-scribes what is going on:
1. From the two relationships above, you can derive the volume equa-tions for each cylinder so that the diameters and speed of the pistonsare included:
� � � � � �� ��� � � � � � � � �� � �������
and
� � � � � � � �� � � ��� � � � � � � �������
2. Since the oil does not compress, at each instant when piston A ismoving, you must have � � ����� , thus:
� � �� � ������ � � � � � � ������� �
After canceling � , � , and 4, you end up with a mathematical modeldescribing this problem that you can use to answer all sorts of in-teresting questions:
��� ���� �
� � �� �Using your model, you can compute the following solutions:
1. Given: ����� �� in, ��� � ��� in, and �� � � insec, find �� . From your
model, you derive:
��� ���� �
� � �� � � �� � ���� ���� �
from which you can compute
� � �� � � insec
�
2. Likewise, you can use your model to compute
��� �� �
in �exactly.

xiv

Contents
1 Warming Up 11.1 Units and Rates . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Total Change = Rate � Time . . . . . . . . . . . . . . . . . 41.3 The Modeling Process . . . . . . . . . . . . . . . . . . . . . 61.4 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Imposing Coordinates 132.1 The Coordinate System . . . . . . . . . . . . . . . . . . . . 13
2.1.1 Going from � to a Pair of Real Numbers. . . . . . 142.2 Three Features of a Coordinate System . . . . . . . . . . . 15
2.2.1 Scaling . . . . . . . . . . . . . . . . . . . . . . . . . 152.2.2 Axes Units . . . . . . . . . . . . . . . . . . . . . . . 16
2.3 A Key Step in all Modeling Problems . . . . . . . . . . . . 172.4 Distance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3 Three Simple Curves 293.1 The Simplest Lines . . . . . . . . . . . . . . . . . . . . . . . 293.2 Circles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.3 Intersecting Curves I . . . . . . . . . . . . . . . . . . . . . 323.4 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4 Linear Modeling 394.1 The Earning Power Problem . . . . . . . . . . . . . . . . . 394.2 Relating Lines and Equations . . . . . . . . . . . . . . . . 404.3 Non-vertical Lines . . . . . . . . . . . . . . . . . . . . . . . 424.4 General Lines . . . . . . . . . . . . . . . . . . . . . . . . . . 454.5 Lines and Rate of Change . . . . . . . . . . . . . . . . . . . 454.6 Back to the Earning Power Problem . . . . . . . . . . . . . 484.7 What’s Needed to Build a Linear Model? . . . . . . . . . . 504.8 Linear Application Problems . . . . . . . . . . . . . . . . . 504.9 Perpendicular and Parallel Lines . . . . . . . . . . . . . . . 514.10 Intersecting Curves II . . . . . . . . . . . . . . . . . . . . . 514.11 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
xv

xvi CONTENTS
5 Functions and Graphs 595.1 Relating Data, Plots and Equations . . . . . . . . . . . . . 595.2 What is a Function? . . . . . . . . . . . . . . . . . . . . . . 61
5.2.1 The definition of a function(equation viewpoint) . . . . . . . . . . . . . . . . . 62
5.2.2 The definition of a function(conceptual viewpoint) . . . . . . . . . . . . . . . . 65
5.3 The Graph of a Function . . . . . . . . . . . . . . . . . . . 665.4 The Vertical Line Test . . . . . . . . . . . . . . . . . . . . . 68
5.4.1 Imposed Constraints . . . . . . . . . . . . . . . . . 685.5 Linear Functions . . . . . . . . . . . . . . . . . . . . . . . . 695.6 Profit Analysis . . . . . . . . . . . . . . . . . . . . . . . . . 705.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6 Graphical Analysis 796.1 Visual Analysis of a Graph . . . . . . . . . . . . . . . . . . 79
6.1.1 Visualizing the domain and range . . . . . . . . . 796.1.2 Interpreting Points on the Graph . . . . . . . . . . 806.1.3 Interpreting Intercepts of a Graph . . . . . . . . . 826.1.4 Interpreting Increasing and Decreasing . . . . . . 82
6.2 Circles and Semicircles . . . . . . . . . . . . . . . . . . . . 846.3 Multipart Functions . . . . . . . . . . . . . . . . . . . . . . 866.4 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
7 Quadratic Modeling 917.1 Parabolas and Vertex Form . . . . . . . . . . . . . . . . . . 91
7.1.1 First Maneuver: Shifting . . . . . . . . . . . . . . . 937.1.2 Second Maneuver: Reflection . . . . . . . . . . . . 957.1.3 Third Maneuver: Vertical Dilation . . . . . . . . . 957.1.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . 95
7.2 Completing the Square . . . . . . . . . . . . . . . . . . . . 967.3 Interpreting the Vertex . . . . . . . . . . . . . . . . . . . . 997.4 Quadratic Modeling Problems . . . . . . . . . . . . . . . . 100
7.4.1 How many points determine a parabola? . . . . . 1047.5 What’s Needed to Build a Quadratic Model? . . . . . . . . 1077.6 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
8 Composition 1118.1 The Formula for a Composition . . . . . . . . . . . . . . . 112
8.1.1 Some notational confusion . . . . . . . . . . . . . 1158.2 Domain, Range, etc. for a Composition . . . . . . . . . . . 1168.3 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120

CONTENTS xvii
9 Three Construction Tools 1239.1 A Low-tech Exercise . . . . . . . . . . . . . . . . . . . . . . 1239.2 Reflection . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1249.3 Shifting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1269.4 Dilation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1289.5 Vertex Form and Order of Operations . . . . . . . . . . . . 1319.6 Summary of Rules . . . . . . . . . . . . . . . . . . . . . . . 1329.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
10 Arithmetic 13910.1 Function Arithmetic . . . . . . . . . . . . . . . . . . . . . . 140
10.1.1 What about the domain? . . . . . . . . . . . . . . 14110.2 Graphical Interpretation . . . . . . . . . . . . . . . . . . . 14210.3 Step Functions . . . . . . . . . . . . . . . . . . . . . . . . . 142
10.3.1 Building Step Functions . . . . . . . . . . . . . . . 14310.4 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
11 Inverse Functions 14911.1 Concept of an Inverse Function . . . . . . . . . . . . . . . 149
11.1.1 An Example . . . . . . . . . . . . . . . . . . . . . . 15011.1.2 A Second Example . . . . . . . . . . . . . . . . . . 15111.1.3 A Third Example . . . . . . . . . . . . . . . . . . . 151
11.2 Graphical Idea of an Inverse . . . . . . . . . . . . . . . . . 15211.2.1 One-to-one Functions . . . . . . . . . . . . . . . . 154
11.3 Inverse Functions . . . . . . . . . . . . . . . . . . . . . . . 15511.3.1 Schematic Idea of an Inverse Function . . . . . . 15611.3.2 Graphing Inverse Functions . . . . . . . . . . . . 157
11.4 Trying to Invert a Non one-to-one Function . . . . . . . . 15711.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
12 Rational Functions 16312.1 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
13 Measuring an Angle 16913.1 Standard and Central Angles . . . . . . . . . . . . . . . . . 17013.2 An Analogy . . . . . . . . . . . . . . . . . . . . . . . . . . . 17113.3 Degree Method . . . . . . . . . . . . . . . . . . . . . . . . . 17113.4 Radian Method . . . . . . . . . . . . . . . . . . . . . . . . . 17413.5 Areas of Wedges . . . . . . . . . . . . . . . . . . . . . . . . 177
13.5.1 Chord Approximation . . . . . . . . . . . . . . . . 17913.6 Great Circle Navigation . . . . . . . . . . . . . . . . . . . . 18013.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183

xviii CONTENTS
14 Measuring Circular Motion 18514.1 Different ways to measure
Cosmo’s speed . . . . . . . . . . . . . . . . . . . . . . . . . 18514.2 Different Ways to Measure
Circular Motion . . . . . . . . . . . . . . . . . . . . . . . . 18714.2.1 Three Key Formulas . . . . . . . . . . . . . . . . . 187
14.3 Music Listening Technology . . . . . . . . . . . . . . . . . 19014.4 Belt and Wheel Problems . . . . . . . . . . . . . . . . . . . 19314.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
15 The Circular Functions 19915.1 Sides and Angles of a Right Triangle . . . . . . . . . . . . 19915.2 The Trigonometric Ratios . . . . . . . . . . . . . . . . . . . 20015.3 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . 20215.4 Circular Functions . . . . . . . . . . . . . . . . . . . . . . . 204
15.4.1 Are the trigonometric ratios functions? . . . . . . 20515.4.2 Relating circular functions and right triangles . . 207
15.5 What About Other Circles? . . . . . . . . . . . . . . . . . . 20815.6 Other Basic Circular Function . . . . . . . . . . . . . . . . 20915.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
16 Trigonometric Functions 21716.1 Easy Properties of Circular Functions . . . . . . . . . . . 21716.2 Identities . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22016.3 Graphs of Circular Functions . . . . . . . . . . . . . . . . 222
16.3.1 A matter of scaling . . . . . . . . . . . . . . . . . . 22316.3.2 The sine and cosine graphs . . . . . . . . . . . . . 22316.3.3 The tangent graph . . . . . . . . . . . . . . . . . . 226
16.4 Trigonometric Functions . . . . . . . . . . . . . . . . . . . 22716.4.1 A Transition . . . . . . . . . . . . . . . . . . . . . . 22716.4.2 Graphs of trigonometric functions . . . . . . . . . 22916.4.3 Notation for trigonometric functions . . . . . . . . 229
16.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
17 Sinusoidal Functions 23317.1 A special class of functions . . . . . . . . . . . . . . . . . . 233
17.1.1 How to roughly sketch a sinusoidal graph . . . . 23617.1.2 Functions not in standard sinusoidal form . . . . 239
17.2 Examples of sinusoidal behavior . . . . . . . . . . . . . . . 24117.3 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
18 Inverse Circular Functions 24718.1 Solving Three Equations . . . . . . . . . . . . . . . . . . . 24718.2 Inverse Circular Functions . . . . . . . . . . . . . . . . . . 25018.3 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . 25318.4 How to solve trigonometric equations . . . . . . . . . . . . 256

CONTENTS xix
18.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
19 Exponential Functions 26519.1 Functions of Exponential Type . . . . . . . . . . . . . . . . 266
19.1.1 Reviewing the Rules of Exponents . . . . . . . . . 26719.2 The Functions � � ������� . . . . . . . . . . . . . . . . . . . . 269
19.2.1 The case � � . . . . . . . . . . . . . . . . . . . . 27019.2.2 The case ��� . . . . . . . . . . . . . . . . . . . . . 27119.2.3 The case ���� . . . . . . . . . . . . . . . . . . 271
19.3 Piano Frequency Range . . . . . . . . . . . . . . . . . . . . 27219.4 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
20 Exponential Modeling 27720.1 The Method of Compound Interest . . . . . . . . . . . . . 278
20.1.1 Two Examples . . . . . . . . . . . . . . . . . . . . . 27920.1.2 Discrete Compounding . . . . . . . . . . . . . . . 280
20.2 The Number andthe Exponential Function . . . . . . . . . . . . . . . . . . . 28120.2.1 Calculator drill . . . . . . . . . . . . . . . . . . . . 28320.2.2 Back to the original problem... . . . . . . . . . . . 283
20.3 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
21 Logarithmic Functions 28721.1 The Inverse Function of � �� � . . . . . . . . . . . . . . . . 28721.2 Alternate form for
functions of exponential type . . . . . . . . . . . . . . . . . 29021.3 The Inverse Function of � ����� . . . . . . . . . . . . . . . . 29121.4 Measuring the Loudness of Sound . . . . . . . . . . . . . 29421.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
22 Parametric Equations 30322.1 Parametric Equations . . . . . . . . . . . . . . . . . . . . . 30422.2 Motivation: Keeping track of a bug . . . . . . . . . . . . . 30422.3 Examples of Parametrized Curves . . . . . . . . . . . . . . 30522.4 Function graphs . . . . . . . . . . . . . . . . . . . . . . . . 306
22.4.1 A useful trick . . . . . . . . . . . . . . . . . . . . . 30722.5 Circular motion . . . . . . . . . . . . . . . . . . . . . . . . 308
22.5.1 Standard circular motion . . . . . . . . . . . . . . 30822.5.2 General circular motion . . . . . . . . . . . . . . . 309
22.6 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
23 Linear Motion 31523.1 Motion of a Bug . . . . . . . . . . . . . . . . . . . . . . . . 31523.2 General Setup . . . . . . . . . . . . . . . . . . . . . . . . . 31723.3 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321

xx CONTENTS
Appendix 325
A Useful Formulas 327
B Answers 331
C GNU Free Documentation License 347C.1 Applicability and Definitions . . . . . . . . . . . . . . . . . 348C.2 Verbatim Copying . . . . . . . . . . . . . . . . . . . . . . . 349C.3 Copying in Quantity . . . . . . . . . . . . . . . . . . . . . . 349C.4 Modifications . . . . . . . . . . . . . . . . . . . . . . . . . . 350C.5 Combining Documents . . . . . . . . . . . . . . . . . . . . 352C.6 Collections of Documents . . . . . . . . . . . . . . . . . . . 352C.7 Aggregation With Independent Works . . . . . . . . . . . . 352C.8 Translation . . . . . . . . . . . . . . . . . . . . . . . . . . . 353C.9 Termination . . . . . . . . . . . . . . . . . . . . . . . . . . . 353C.10 Future Revisions of This License . . . . . . . . . . . . . . . 353
References 355
Index 355

Chapter 1
Warming Up
The basic theme of this book is to study precalculus within the contextof problem solving. This presents a challenge, since skill in problemsolving is as much an art or craft as it is a science. As a consequence,the process of learning involves an active apprenticeship rather than apassive reading of a text. We are going to start out by assembling a basictoolkit of examples and techniques that are essential in everything thatfollows. The main ideas discussed in the next couple of chapters willsurely be familiar; our perspective on their use and importance may benew.
The process of going from equations to pictures involves the key con-cept of a graph , while the reverse process of going from pictures (or rawdata) to equations is called modeling. Fortunately, the study of graphingand modeling need not take place in a theoretical vacuum. For example,imagine you have tossed a ball from the edge of a cliff. A number of nat-ural questions arise: Where and when does the ball reach its maximumheight? Where and when does the ball hit the ground? Where is the balllocated after � seconds? PSfrag replacements
-axis
-axis
-axis
Cliff.
Path of tossed ball.
Ground level.
Figure 1.1: Ball toss.
We can attack these questions from two directions. Ifwe knew some basic physics, then we would have equa-tions for the motion of the ball. Going from these equationsto the actual curved path of the ball becomes a graphingproblem; answering the questions requires that we reallyunderstand the relationship between the symbolic equa-tions and the curved path. Alternatively, we could ap-proach these questions without knowing any physics. Theidea would be to collect some data, keeping track of theheight and horizontal location of the ball at various times,then find equations whose graphs will “best” reproduce thecollected data points; this would be a modeling approach to the prob-lem. Modeling is typically harder than graphing, since it requires goodintuition and a lot of experience.
1

2 CHAPTER 1. WARMING UP
1.1 Units and RatesA marathon runner passes the one-mile marker of the race with a clockedspeed of 18 feet/second. If a marathon is 26.2 miles in length and thisspeed is maintained for the entire race, what will be the runner’s totaltime?
This simple problem illustrates a key feature of modeling with mathe-matics: Numbers don’t occur in isolation; a number typically comes withsome type of unit attached. To answer the question, we’ll need to recalla formula which precisely relates “total distance traveled” to “speed” and“elapsed time”. But, we must be VERY CAREFUL to use consistentunits. We are given speed units which involve distance in “feet” and thelength of the race involves distance units of “miles”. We need to make ajudgment call and decide on a single type of distance unit to use through-out the problem; either choice is OK. Let’s use “feet”, then here is the factwe need to recall:
(total distance traveled) � (constant speed) � (elapsed time) (1.1)(ft) � (ft/sec) � (sec)
To apply the formula, let � represent the elapsed time in seconds andfirst carry out a “conversion of units” using the conversion factor “5,280ft/mile”. Recall, we can manipulate the units just like numbers, cancel-ing common units on the top and bottom of a fraction:
��� � � mile � ��� � � � � ft/mile � � � ��� � � � ��� � � � � � ////mile ft////mile
� � ��� � � � ��� � � � � � ft �Formula 1.1 can now be applied:
� ��� � � � ��� � � � � � ft � � ft � sec � �� � ��� � � � ��� � � � � � � � /ft
/ft/sec� �
� �� � � ��� � sec
� � �� � � ��� sec � �So, the runner would complete the race in � � � �� � � ��� seconds. If wewanted this answer in more sensible units, we would go through yetanother units conversion:
� � � �� � � ��� sec � � min/ � � sec � � �
hr/ � � min ��
� � �� � � ���� � � � hr
� � � � � � hr �

1.1. UNITS AND RATES 3
The finish clock will display elapsed time in units of “hours : minutes :seconds”. Two further conversions (see Exercise 1.7) lead to our runnerhaving a time of 2:08:05.33; this is a world class time!
Manipulation of units becomes especially important when we are work-ing with the density of a substance, which is defined by
density def� massvolume
�
For example, pure water has a density of g � cm � . Notice, given any twoof the quantities “density, volume or mass,” we can solve for the remain-ing unknown using the formula. For example, if � � �
g of an unknownsubstance has a volume of 2.1 liters, then the density would be
� � massvolume
� � � �g
� � L
�� � � �� � � �
�g/L � �
� /L
��� � � cm� �� � �
�� � g � cm � �
Example 1.1.1. A sphere of solid gold has a mass of � � kg and the den-sity of gold is � �� g � cm� . What is the radius of the sphere?
Solution. This problem is more involved. To answer this, let � be theunknown radius of the sphere in units of cm. The volume of the sphereis � ���� ����� . Since the sphere is solid gold, the density of gold is the ratio
density of gold � mass of spherevolume of sphere
Plugging in what we know, we get the equation
� �� gcm � �
� � � kg� � ��� ��� �
� � � kg� � � � ���
� � � � g kg � �
� � g� � ��� ���
Solving for ��� we find
� � � � �cm�
from which we get
� � � � �cm��� ��� � � � � � cm

4 CHAPTER 1. WARMING UP
1.2 Total Change = Rate � TimeWe live in a world where things are changing as time goes by: the tem-perature during the day, the cost of tuition, the distance you will travelafter leaving this class, and so on. The ability to precisely describe howa quantity is changing becomes especially important when making anykind of experimental measurements. For this reason, let’s start with aclear and careful definition. If a quantity is changing with respect to time(like temperature, distance or cost), we can keep track of this using whatis called a rate (also sometimes called a rate of change); this is definedas follows:
rate def� change in the quantitychange in time
This sort of thing comes up so frequently, there is special shorthandnotation commonly used: We let the Greek letter � (pronounced “delta”)be shorthand for the phrase “change in.” With this agreement, we canrewrite our rate definition in this way:
rate def� � quantity� time
But, now the question becomes: How do we calculate a rate? If you thinkabout it, to calculate “ � quantity” in the rate definition requires that wecompare two quantities at two different times and see how they differ(i.e., how they have changed). The two times of comparison are usuallycalled the final time and the initial time. We really need to be preciseabout this, so here is what we mean:
� quantity � �value of quantity at final time ����value of quantity at initial time �
� time � �final time ��� �
initial time � �For example, suppose that on June 4 we measure that the tempera-
ture at 8:00 am is � ��� F and at 10:00 am it is� � F. So, the final time is
10:00 am, the initial time is 8:00 am and the temperature is changingaccording to the
rate � � quantity� time
� final value of quantity � initial value of quantityfinal time � initial time
�� �� � � degrees
�� � �� �� � � hours� deg/hr �
As a second example, suppose on June 5 the temperature at 8:00 am is71
�and at 10:00 am it is 65
�. So, the final time is 10:00 am, the initial

1.2. TOTAL CHANGE = RATE � TIME 5
time is 8:00 am and the temperature is changing according to the
rate � � quantity� time
� final value of quantity � initial value of quantityfinal time � initial time
� � � � � degrees �� � �� �� � � hours
� � deg/hr �
These two examples illustrate that a rate can be either a positive or anegative number. More importantly, it highlights that we really need tobe careful when making a rate computation. In both examples, the initialand final times are the same and the two temperatures involved are thesame, BUT whether they occur at the initial or final time is interchanged.If we accidently mix this up, we will end up being off by a minus sign.
There are many situations where the rate is the same for all timeperiods. In a case like this, we say we have a constant rate. For example,imagine you are driving down the freeway at a constant speed of � � mi/hr.The fact that the speedometer needle indicates a steady speed of � � mi/hrmeans the rate your distance is changing is constant.
In cases when we have a constant rate, we often want to find the totalamount of change in the quantity over a specific time period. The keyprinciple in the background is this:
Total Change in some Quantity � Rate � Time (1.2)
It is important to mention that this formula only works when we havea constant rate, but that will be the only situation we encounter in thiscourse. One of the main goals of calculus is to develop a version of (1.2)that works for non-constant rates. Here is another example; others willoccur throughout the text.
Example 1.2.1. A water pipe mounted to the ceiling has a leak. It isdripping onto the floor below and creates a circular puddle of water. Thesurface area of this puddle is increasing at a constant rate of 4 cm
�/hour.
Find the surface area and dimensions of the puddle after 84 minutes.
Solution. The quantity changing is “surface area” and we are given a“rate” and “time.” Using (1.2) with time ��� �
�minutes,
Total Surface Area � Rate � Time
�� �
cm�
hr � �� � �� � hr �
� �� � cm
��
The formula for the area of a circular region of radius � is given at the
back of this text. Using this, the puddle has radius � �� �� �� � ��� � cm
at time � � ��
minutes.

6 CHAPTER 1. WARMING UP
1.3 The Modeling ProcessModeling is a method used in disciplines ranging from architecture tozoology. This mathematical technique will crop up any time we are prob-lem solving and consciously trying to both “describe” and “predict.” In-evitably, mathematics is introduced to add structure to the model, butthe clean equations and formulas only arise after some (or typically a lot)of preliminary work.
A model can be thought of as a caricature in that it will pick out cer-tain features (like a nose or a face) and focus on those at the expense ofothers. It takes a lot of experience to know which models are “good” and“bad,” in the sense of isolating the right features. In the beginning, mod-eling will lead to frustration and confusion, but by the end of this courseour comfort level will dramatically increase. Let’s look at an illustrationof the problem solving process.
Example 1.3.1. How much time do you anticipate studying precalculuseach week?
Solution. One possible response is simply to say “a little” or “way toomuch!” You might not think these answers are the result of modeling,but they are. They are a consequence of modeling the total amount ofstudy time in terms of categories such as “a little,” “some,” “lots,” “waytoo much,” etc. By drawing on your past experiences with math classesand using this crude model you arrived at a preliminary answer to thequestion.
Let’s put a little more effort into the problem and try to come up witha numerical estimate. If � is the number of hours spent on precalculus agiven week, it is certainly the case that:
��� (hours in class) � (hours reading text) � (hours doing homework)
Our time in class each week is known to be 5 hours. However, the othertwo terms require a little more thought. For example, if we can comfort-ably read and digest a page of text in (on average) 15 minutes and thereare � pages of text to read during the week, then
(hours reading text) � �� � � hours �
As for homework, if a typical homework problem takes (on average) 25minutes and there are
�homework problems for the week, then
(hours doing homework) � � �� � � hours �
We now have a mathematical model for the weekly time commitment toprecalculus:
� � ��
�� � ��� � �� � � hours �

1.3. THE MODELING PROCESS 7
Is this a good model? Well, it is certainly more informative than ouroriginal crude model in terms of categories like “a little” or “lots.” But, thereal plus of this model is that it clearly isolates the features being usedto make our estimated time commitment and it can be easily modified asthe amount of reading or homework changes. So, this is a pretty goodmodel. However, it isn’t perfect; some homework problems will take a lotmore than 25 minutes!

8 CHAPTER 1. WARMING UP
1.4 ExercisesProblem 1.1. (a) Verify that 7685.33 sec-
onds is 2 hours 8 minutes 5.33 seconds.
(b) Which is faster: 100 mph or 150 ft/s?
(c) Gina’s salary is 1 cent/second for a 40hour work week. Tiare’s salary is $1400for a 40 hour work week. Who has ahigher salary?
(d) Assume it takes 180 quarter credits toget a baccalaureate degree. If 1 quartercredit counts for one classroom hour oflecture each week of the quarter and youstudy 2.5 hours for each hour in class,how many hours must you invest to geta degree? (You may assume each quar-ter has 10 weeks of class and no holi-days.)
Problem 1.2. A typical scuba diving tankis initially filled with pressurized air at �������lb/in � . A good diver constantly monitors thepressure in their tank during a dive.
(a) Suppose Cherie is using air at a rateof ��� lb/in � /min. Assuming she shouldsurface when her air pressure reaches� ��� lb/in � , how long can she remain un-derwater?
(b) Dave plans a dive that will require� �
minutes of underwater time. Assume heplans to surface when his air pressurereaches ����� lb/in � . What is the maxi-mum rate at which Dave can use his air,in units of “lb/in � /min.”
Problem 1.3. A prime number is an integergreater than one such that the only positiveintegers that divide it evenly (i.e., with remain-der zero) are itself and 1. For example, � , � , ,, ��� , ��� , � , � � are the first few prime num-
bers. Recently, someone discovered a primenumber with ������� ����� digits.
(a) If you were going to write down thisnumber and each digit requires �� mm,how long would the number be?
(b) If you could speak at the rate of � dig-its/second for
�hours each day, how
long would it take you to recite the num-ber? (The exact number is ������������������� �� , which your calculator will not like verymuch!)
Problem 1.4. Nonresident yearly tuition at theUW in ������! was $ ��� "� . Suppose nonresidentyearly tuition at the UW in ����� � was $ ����� � .
(a) What is the rate of change in yearly non-resident tuition?
(b) Assume the rate of change in yearly non-resident tuition is constant, then whatwould be the yearly nonresident tuitionin the year �����# ?
Problem 1.5. Sarah can bicycle a loop aroundthe north part of Lake Washington in 2 hoursand 40 minutes. If she could increase her av-erage speed by 1 km/hr, it would reduce hertime around the loop by 6 minutes. How manykilometers long is the loop?
Problem 1.6. The density of lead is 11.34g/cm $ and the density of aluminum is 2.69g/cm $ . Find the radius of lead and aluminumspheres each having a mass of 50 kg.
Problem 1.7. Marathon runners keep trackof their speed using units of pace = min-utes/mile.
(a) Lee has a speed of 16 ft/sec; what is hispace?
(b) Allyson has a pace of 6 min/mile; whatis her speed?
(c) Adrienne and Dave are both runninga race. Adrienne has a pace of 5.7min/mile and Dave is running 10.3mph. Who is running faster?
Problem 1.8. Convert each of the followingsentences into “pseudo-equations.” For ex-ample, suppose you start with the sentence:“The cost of the book was more than $ ��� andthe cost of the magazine was $� .” A first stepwould be these “pseudo-equations”:
(Book cost) % $10 and (Magazine cost) = $4.
(a) John’s salary is $ �!&� ����� a year and hepays no taxes.
(b) John’s salary is at most $ �!�� ����� a yearand he pays �� % of his salary in taxes.

1.4. EXERCISES 9
(c) John’s salary is at least $ �!�� ����� a yearand he pays more than � � % of his salaryin taxes.
(d) The number of students taking Math ���"�at the UW is somewhere between ��"���and � � ��� each year.
(e) The cost of a new red Porsche is morethan three times the cost of a new FordF-150 pickup truck.
(f) Each week, students spend at least twobut no more than three hours studyingfor each credit hour.
(g) Twice the number of happy math stu-dents exceeds five times the number ofhappy chemistry students. However, allof the happy math and chemistry stu-dents combined is less than half the to-tal number of cheerful biology students.
(h) The difference between Cady’s high andlow midterm scores was ��� %. Her finalexam score was � %.
(i) The total vote tally for Gov. Tush waswithin one-hundredth of one percent ofone-half the total number of votes cast.
Problem 1.9. Which is a better deal: A 10 inchdiameter pizza for $8 or a 15 inch diameterpizza for $16?
Problem 1.10. The famous theory of relativ-ity predicts that a lot of weird things will hap-pen when you approach the speed of light� � ��� ��� � m/sec. For example, here is a for-mula that relates the mass ��� (in kg) of anobject at rest and its mass when it is movingat a speed � :
� � � ��� ��� �
(a) Suppose the object moving is Dave, whohas a mass of � � � !�! kg at rest. What isDave’s mass at ��� % of the speed of light?At ��� % of the speed of light? At ���& � % ofthe speed of light?
(b) How fast should Dave be moving to havea mass of ���� kg?
Problem 1.11. During a typical evening inSeattle, Pagliacci receives phone orders forpizza delivery at a constant rate: � � orders ina typical � minute period. How many pies aresold in � hours? Assume Pagliacci starts tak-ing orders at ��"��� pm and the profit is a con-stant rate of $ ��� on ��� orders. When will phoneorder profit exceed $ ��� ����� ?
Problem 1.12. In Jonathan Swift’s book, Gul-liver’s Travels, there is the following passage:
The reader may please to observe,that, in the last article of the re-covery of my liberty, the emperorstipulates to allow me a quantityof meat and drink sufficient forthe support of 1728 Lilliputians.Some time after, asking a friendat court how they came to fix onthat determinate number, he toldme that his majesty’s mathemati-cians, having taken the height ofmy body by the help of a quadrant,and finding it to exceed theirs inthe proportion of twelve to one,they concluded from the similar-ity of their bodies, that mine mustcontain at least 1728 of theirs,and consequently would requireas much food as was necessaryto support that number of Lil-liputians. By which the readermay conceive an idea of the inge-nuity of that people, as well as theprudent and exact economy of sogreat a prince.
Where does this number 1728 come from?Does it seem reasonable?
Problem 1.13. A typical cell in the humanbody contains molecules of deoxyribonucleicacid, referred to as DNA for short. In the cell,this DNA is all twisted together in a tight littlepacket. But imagine unwinding (straighteningout) all of the DNA from a single typical celland laying it “end-to-end”; then the sum totallength will be approximately � meters.

10 CHAPTER 1. WARMING UP
end−to−end
2 m
nucleus
cell
lay out
from nucleusisolate DNA
PSfrag replacements
-axis-axis
-axis
Assume the human body has ��� ��� cells con-taining DNA. How many times would the sumtotal length of DNA in your body wrap aroundthe equator of the earth?
Problem 1.14. A water pipe mounted to theceiling has a leak and is dripping onto the floorbelow, creating a circular puddle of water. Thearea of the circular puddle is increasing at aconstant rate of ��� cm � /hour.
(a) Find the area and radius of the puddleafter � minute, � � minutes, hours, �day.
(b) Is the radius of the puddle increasing ata constant rate?
Problem 1.15. During the ��� �� s, Seattle wasdumping an average of �"� million gallons ofsewage into Lake Washington each day.
(a) How much sewage went into Lake Wash-ington in a week? In a year?
(b) In order to illustrate the amounts in-volved, imagine a rectangular prismwhose base is the size of a footballfield ( ����� yards � "� yards) with height�
yards. What are the dimensions ofsuch a rectangular prism containing thesewage dumped into Lake Washington ina single day? (Note: There are
gal-lons in one cubic foot. Dumping intoLake Washington has stopped; now itgoes into the Puget Sound.)
Problem 1.16. Dave has inherited an appleorchard on which 60 trees are planted. Under
these conditions, each tree yields 12 bushelsof apples. According to the local WSU exten-sion agent, each time Dave removes a tree theyield per tree will go up 0.45 bushels. Let � bethe number of trees in the orchard and � theyield per tree.
(a) Find a formula for � in terms of the un-known � . (Hint: Make a table of datawith one column representing variousvalues of � and the other column thecorresponding values of � . After youcomplete the first few rows of the table,you need to discover the pattern.)
(b) What possible reason(s) might explainwhy the yield goes up when you removetrees?
Problem 1.17. Congress is debating a pro-posed law to reduce tax rates. If the currenttax rate is � %, then the proposed rate after �years is given by this formula:
�
��� �
��� ��
Rewrite this formula as a simple fraction. Useyour formula to calculate the new tax rate af-ter � , � , and �"� years. Would tax rates in-crease or decrease over time? Congress claimsthat this law would ultimately cut peoples’ taxrates by
%. Do you believe this claim?
Problem 1.18. (a) The temperature at 7:00am is 44 � F and the temperature at 10:00am is 50 � F. What are the initial time, thefinal time, the initial temperature andthe final temperature? What is the rateof change in the temperature between7:00 am and 10:00 am?
(b) Assume it is 50 � F at 10:00 am and therate of change in the temperature be-tween 10:00 am and 2:00 pm is thesame as the rate in part (a). What is thetemperature at 2:00 pm?
(c) The temperature at 4:30 pm is 54 � F andthe temperature at 6:15 pm is 26 � F.What are the initial time, the final time,the initial temperature and the finaltemperature? What is the rate of changein the temperature between 4:30 pm and6:15 pm?

1.4. EXERCISES 11
Problem 1.19. (a) Solve for � : ����� � ��� ��� .
(b) Solve for � :���� �� � � .
(c) Solve for � :�� � ��� � ����� � � .
(d) Solve for � : � ��� % � � �� .
(e) Write as a single fraction:
��� �
� � �
Problem 1.20. (a) Find the exact value of:� � �� , � �
�� �
��, � � �� �
��� �� , � � �� � �� � �� � �
� � .
(b) Let be a positive integer (i.e. ���� � � � � � � � !&� ). A useful general formulais this:
��� �� � �
� �� �� $
� �� �
����� � � ���� ��� � �
���
To five decimal places, what is � � �� �
�� � � �
��� ��� � ��� ��� � �
��� ?
(c) Solve this inequality ( is a positive inte-ger):
��� �� � �
� �� �� $
� �� �
����� � � ���� % �� ���

12 CHAPTER 1. WARMING UP

Chapter 2
Imposing Coordinates
You find yourself visiting Spangle, WA and dinner time is approaching.A friend has recommended Tiff’s Diner, an excellent restaurant; how willyou find it?
Of course, the solution to this simple problem amounts to locating a“point” on a two-dimensional map. This idea will be important in manyproblem solving situations, so we will quickly review the key ideas.
2.1 The Coordinate System
PSfrag replacements
-axis
-axis
-axis �
�
Figure 2.1: Two points in aplane.
If we are careful, we can develop the flow of ideas under-lying two-dimensional coordinate systems in such a waythat it easily generalizes to three-dimensions. Supposewe start with a blank piece of paper and mark two points;let’s label these two points “ � ” and “ � .” This presents thebasic problem of finding a foolproof method to reconstructthe picture.
The basic idea is to introduce a coordinate system forthe plane (analogous to the city map grid of streets), al-lowing us to catalog points in the plane using pairs of realnumbers (analogous to the addresses of locations in the city).
Here are the details. Start by drawing two perpendicular lines, calledthe horizontal axis and the vertical axis, each of which looks like a copyof the real number line. We refer to the intersection point of these twolines as the origin. Given � in the plane, the plan is to use these two axesto obtain a pair of real numbers
� � � � that will give us the exact location of� � With this in mind, the horizontal axis is often called the -axis and thevertical axis is often called the � -axis. Remember, a typical real numberline (like the -axis or the � -axis) is divided into three parts: the positivenumbers, the negative numbers, and the number zero (see Figure 2.2(a)).This allows us to specify positive and negative portions of the -axis and� -axis. Unless we say otherwise, we will always adopt the convention thatthe positive -axis consists of those numbers to the right of the origin on
13

14 CHAPTER 2. IMPOSING COORDINATES
the -axis and the positive � -axis consists of those numbers above theorigin on the � -axis. We have just described the � -coordinate system forthe plane:
PSfrag replacements
-axis
-axis
-axis
Positive -axis
Positive -axis
Negative -axis
Negative -axis
Origin
Negative realnumbers
Zero
Positive realnumbers
(a) Number line.
PSfrag replacements
-axis
-axis
-axis
Positive � -axis
Positive � -axis
Negative � -axis
Negative � -axis
Origin
Negative realnumbers
ZeroPositive realnumbers
(b) ��� -coordinate system.
Figure 2.2: Coordinates.
2.1.1 Going from�
to a Pair of Real Numbers.PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
�
�
���
��
Figure 2.3: Coordinatepairs.
Imagine a coordinate system had been drawn on our pieceof paper in Figure 2.1. Let’s review the procedure of goingfrom a point � to a pair of real numbers:
1. First, draw two new lines passing through � , oneparallel to the -axis and the other parallel to the� -axis; call these � and �� , as pictured in Figure 2.3.
2. Notice that � will cross the � -axis exactly once; thepoint on the � -axis where these two lines cross willbe called “� .” Likewise, the line � � will cross the -axis exactly once; the point on the -axis wherethese two lines cross will be called “ .”
3. If you begin with two different points, like � and � in Figure 2.1,you will see that the two pairs of points you obtain will be different;i.e., if � gives you the pair
� � � ��� � , then either �� �� or ���� ��� . Thisshows that two different points in the plane give two different pairsof real numbers and describes the process of assigning a pair of realnumbers to the point � .
The great thing about the procedure we just described is that it isreversible! In other words, suppose you start with a pair of real numbers,say
� �� � � . Locate the number on the -axis and the number � on the� -axis. Now draw two lines: a line � parallel to the -axis passing throughthe number � on the � -axis and a line � � parallel to the � -axis passing

2.2. THREE FEATURES OF A COORDINATE SYSTEM 15
through the number on the -axis. The two lines � and ��� will intersectin exactly one point in the plane, call it � . This procedure describeshow to go from a given pair of real numbers to a point in the plane. Inaddition, if you start with two different pairs of real numbers, then thecorresponding two points in the plane are going to be different. In thefuture, we will constantly be going back and forth between points in theplane and pairs of real numbers using these ideas.
Definition 2.1.1. Coordinate System: Every point � in the � -plane cor-responds to a unique pair of real numbers
� � � � , where is a number on thehorizontal -axis and � is a number on the vertical � -axis; for this reason,we commonly use the notation “ � � � �� � � � ”PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
FirstQuadrant
SecondQuadrant
ThirdQuadrant
FourthQuadrant
Figure 2.4: Quadrants in the� � -plane.
Having specified positive and negative directions onthe horizontal and vertical axes, we can now divide ourtwo dimensional plane into four quadrants. The firstquadrant corresponds to all the points where both co-ordinates are positive, the second quadrant consists ofpoints with the first coordinate negative and the secondcoordinate positive, etc. Every point in the plane will liein one of these four quadrants or on one of the two axes.This quadrant terminology is useful to give a rough senseof location, just as we use the terminology “Northeast,Northwest, Southwest and Southeast” when discussinglocations on a map.
2.2 Three Features of a Coordinate SystemA coordinate system involves scaling, labeling and units on each of theaxes.
2.2.1 ScalingSketch two � coordinate systems. In the first, make the scale on eachaxis the same. In the second, assume “one unit” on the axis has thesame length as “two units” on the � axis. Plot the points
� � � , � � � � ,� � � � � �� � , � � � � �
� � , � � � � �� � , � � � � �� � , � � ��� � , � � � �� � , � � � �� � , � � � �
� � , � � � � �� � , � � � .Both pictures illustrate how the points lie on a parabola in the � -coordinate system, but the aspect ratio has changed. The aspect ratio isdefined by this fraction:
aspect ratio def� length of one unit on the vertical axislength of one unit on the horizontal axis
�
Figure 2.5(a) has aspect ratio 1, whereas Figure 2.5(b) has aspect ratio�� . In problem solving, you will often need to make a rough assumption

16 CHAPTER 2. IMPOSING COORDINATES
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
� � �
� � �
� � �� � � � � � � � �
� � �
� � �� � �� � �(a) Aspect ratio � � .
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
� � �
� � �
� � �� � � � � � � � �
� � �
� � �� � �� � �(b) Aspect ratio � �
� .
Figure 2.5: Coordinates.
about the relative axis scaling. This scaling will depend entirely on theinformation given in the problem. Most graphing devices will allow youto specify the aspect ratio.
2.2.2 Axes UnitsSometimes we are led to coordinate systems where each of the two axesinvolve different types of units (labels). Here is a sample, that illustratesthe power of using pictures.
Example 2.2.1. As the marketing director of Turboweb software, you havebeen asked to deliver a brief message at the annual stockholders meetingon the performance of your product. Your staff has assembled this tabu-lar collection of data; how can you convey the content of this table mostclearly?
TURBOWEB SALES (in $1000’s)week sales week sales week sales week sales week sales
1 11.0517 11 30.0417 21 81.6617 31 221.98 41 603.4032 12.214 12 33.2012 22 90.2501 32 245.325 42 666.8633 13.4986 13 36.693 23 99.7418 33 271.126 43 736.9984 14.9182 14 40.552 24 110.232 34 299.641 44 814.5095 16.4872 15 44.8169 25 121.825 35 331.155 45 900.1716 18.2212 16 49.5303 26 134.637 36 365.982 46 994.8437 20.1375 17 54.7395 27 148.797 37 404.473 47 1099.478 22.2554 18 60.4965 28 164.446 38 447.012 48 1215.19 24.596 19 66.8589 29 181.741 39 494.024 49 1342.9
10 27.1828 20 73.8906 30 200.855 40 545.982 50 1,484.131
One idea is to simply flash an overhead slide of this data to the audi-ence; this can be deadly! A better idea is to use a visual aid. Supposewe let the variable represent the week and the variable � represent thegross sales (in thousands of dollars) in week . We can then plot thepoints
� � � � in the � -coordinate system; see Figure 2.6.Notice, the units on the two axes are very different: � -axis units are
“thousands of dollars” and -axis units are “weeks.” In addition, theaspect ratio of this coordinate system is not 1. The beauty of this pictureis the visual impact it gives your audience. From the coordinate plot wecan get a sense of how the sales figures are dramatically increasing. Infact, this plot is good evidence you deserve a big raise!

2.3. A KEY STEP IN ALL MODELING PROBLEMS 17
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis (Thousands of Dollars)
(Weeks)
0
10 20 30 40 50
200400600800
1,0001,2001,400
Figure 2.6: Turboweb sales.
Mathematical modeling is all about relating concretephenomena and symbolic equations, so we want to em-brace the idea of visualization. Most typically, visualiza-tion will involve plotting a collection of points in the plane.This can be achieved by providing a “list” or a “prescrip-tion” for plotting the points. The material we review in thenext couple of sections makes the transition from sym-bolic mathematics to visual pictures go more smoothly.
2.3 A Key Step in all Modeling ProblemsThe initial problem solving or modeling step of deciding on a choice of � -coordinate system is called imposing a coordinate system: There willoften be many possible choices; it takes problem solving experience todevelop intuition for a “natural” choice. This is a key step in all modelingproblems.
Example 2.3.1. Return to the tossed ball scenario on page 1. How do wedecide where to draw a coordinate system in the picture?
Figure 2.7 on page 18 shows four natural choices of � -coordinatesystem. To choose a coordinate system we must specify the origin. Thefour logical choices for the origin are either the top of the cliff, the bottomof the cliff, the launch point of the ball or the landing point of the ball.So, which choice do we make? The answer is that any of these choiceswill work, but one choice may be more natural than another. For exam-ple, Figure 2.7(b) is probably the most natural choice: in this coordinatesystem, the motion of the ball takes place entirely in the first quadrant,so the and � coordinates of any point on the path of the ball will benon-negative.
Example 2.3.2. Michael and Aaron are running toward each other, be-ginning at opposite ends of a � ��� � � ft. airport runway, as pictured inFigure 2.8 on page 19. Where and when will these guys collide?
Solution. This problem requires that we find the “time” and “location” ofthe collision. Our first step is to impose a coordinate system.
We choose the coordinate system so that Michael is initially locatedat the point
� � � � � � � (the origin) and Aaron is initially located at thepoint � � �
� ��� � � � � � . To find the coordinates of Michael after � seconds,we need to think about how distance and time are related.
Since Michael is moving at the rate of �
ft/second, then after onesecond he is located
�feet right of the origin; i.e., at the point
�� � � � .
After � seconds, Michael has moved an additional �
feet, for a total of�� feet; so he is located at the point� �� � � � , etc. Conclude Michael has
traveled � � ft. to the right after � seconds; i.e., his location is the point

18 CHAPTER 2. IMPOSING COORDINATES
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
Path of tossed ball.
Cliff.
(a) Origin at the top of theledge.
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
Path of tossed ball.
Cliff.
(b) Origin at the bottom of theledge.
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axisPath of tossed ball.
Cliff.
(c) Origin at the landing point.
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
Path of tossed ball.
Cliff.
(d) Origin at the launch point.
Figure 2.7: Choices when imposing an ��� -coordinate system.
� � ��� � �� ��� � � . Similarly, Aaron is located 8 ft. left of his starting location
after 1 second (at the point� � � � � � � � � ), etc. Conclude Aaron has traveled
��� ft. to the left after � seconds; i.e., his location is the point �� ��� ��
� � � � �� ����� � � �The key observation required to solve the problem is that the point
of collision occurs when the coordinates of Michael and Aaron are equal.Because we are moving along the horizontal axis, this amounts to findingwhere and when the -coordinates of
� � ��� and �� ��� agree. This is a
straight forward algebra problem:
� � � � ��� � � � ��� (2.1)� � � � ��� � �� �
� � � � �To the nearest tenth of a second, the runners collide after 434.8
seconds. Plugging � �� � � � � into either expression for the position:
� � � � � � � � ���� � � � � � � � � � � � � � � � � � � .

2.4. DISTANCE 19
PSfrag replacements
-axis
-axis
-axis
Michael: � ftsec Aaron:
� ftsec
� ��� � � � ft
-axis
-axis
(a) The physical picture.
PSfrag replacements
-axis
-axis
-axisMichael: ft
sec
Aaron: ftsec
ft
� -axis
� -axis
����� ��� ��� � ��� � ��� � � ��� ���
(b) The ��� -coordinate picture.
PSfrag replacements
-axis
-axis
-axisMichael: ft
sec
Aaron: ftsec
ft
-axis
-axis
� -axis
� -axis
� ��� ������ � ��� � � ��� � �� � ��� � ��� � � � �
� � ���
Aaron starts here.
� after
seconds.�
after
seconds.
Michael starts here.
NOT TO SCALE!
(c) Building a visual model
PSfrag replacements
-axis
-axis
-axisMichael: ft
sec
Aaron: ftsec
ft
-axis
-axis
Aaron: 8 mph.Michael: 10 mph.
6,522 feet to collision point.
(d) Michael and Aaron’s collision point.
Figure 2.8: Michael and Aaron running head-on.
2.4 Distance
We end this Chapter with a discussion of direction and distance in theplane. To set the stage, think about the following analogy:
Example 2.4.1. You are in an airplane flying from Denver to New York.How far will you fly? To what extent will you travel north? To what extentwill you travel east?
Consider two points ��� � � � � � � and � � � � � � � � in the � coordinatesystem, where we assume that the units on each axis are the same;for example, both in units of “feet.” Imagine starting at the location �(Denver) and flying to the location � (New York) along a straight line

20 CHAPTER 2. IMPOSING COORDINATES
segment; see Figure 2.9(a). Now ask yourself this question: To whatoverall extent have the and � coordinates changed?
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
??
??
??
� Begin (start) here.
�End (stop)here.
Beginning point.
Endingpoint.
(a) Starting and stoppingpoints.
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
??
Begin (start) here.
End (stop)here.
��� � ���
� �
� �� �
� ����� � � � �
Beginning point.
���� � � � � �
Endingpoint.�
(b) Coordinates for � and � .
Figure 2.9: The meaning of � � and ��� .
To answer this, we introduce visual and notational aides into thisfigure. We have inserted an “arrow” pointing from the starting position �to the ending position � ; see Figure 2.9(b). To simplify things, introducethe notation � to keep track of the change in the -coordinate and � �to keep track of the change in the � -coordinate, as we move from � to � .Each of these quantities can now be computed:
� � change in -coordinate going from � to � (2.2)� ( -coord of ending point) � ( -coord of beginning point)� � � �
� � � change in � -coordinate going from � to �� (� -coord of ending point) � (� -coord of beginning point)� � � � � � �
We can interpret � and � � using the right triangle in Figure 2.9(b).This means we can use the Pythagorean Theorem to write:
�� � � � � � � � � � � ��
that is,
� �� � � � � � � � � � � �which tells us the distance � from � to � . In other words, � is the distancewe would fly if we had flown along that line segment connecting the twopoints. As an example, if � � �
� � and � � ��� � � � , then � � � � ��,
� � ��� � and � � �
.

2.4. DISTANCE 21
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
� �� ��� ��
�� �
� ��� ��
���� � � � � �Ending point.
� ��� � � � � �Beginning
point.�
Figure 2.10: A different di-rection.
There is a subtle idea behind the way we defined � and � � : You need to specify the “beginning” and “ending”points used to do the calculation in Equations 2.2. Whathappens if we had reversed the choices in Figure 2.9?
Then the quantities � and � � will both be negativeand the lengths of the sides of the right triangle are com-puted by taking the absolute value of � and � � . As far asa distance calculation is concerned, the previous formulastill works because of this algebra equality:
� � � � � � � � � � � �� ��� � � � � � ��� � � � � � �
We will sometimes refer to � and � � as directed dis-tances in the and � directions. The notion of directed distance be-comes important in our discussion of lines in Chapter 4 and later whenyou learn about vectors; it is also very important in calculus.
For example, if ��� ��� � � � and � � � � � , then � � � � � �
�, � � �
��� � and � � �
�
Important Fact 2.4.2 (Distance formula). If � � � � � � � � and � � � � � � � �are two points in the plane, then the straight line distance between thepoints (in the same units as the two axes) is given by the formula
� � � � � � � � � � � �� � � � � �
���� � � � � �
�� (2.3)
If your algebra is a little rusty, a very common mistake may crop upwhen you are using the distance formula. For example,
������� ?� ����� �� � ����� ?� ����� �� ���Notice, you have an impossible situation:
�is never equal to
�.
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis

22 CHAPTER 2. IMPOSING COORDINATES
Example 2.4.3. Two cars depart from a four way intersection at the sametime, one heading East and the other heading North. Both cars are travel-ing at the constant speed of �� ft/sec. Find the distance (in miles) betweenthe two cars after hour � minutes. In addition, determine when the twocars would be exactly mile apart.
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
(East)
(North)
����� ��
���� � �
Figure 2.11: Two departingcars.
Solution. Begin with a picture of the situation. We haveindicated the locations of the two vehicles after � secondsand the distance � between them at time � . By the dis-tance formula, the distance between them is
� � ��� � � � � � � � � � � �� � �
� ���
This formula is a first step; the difficulty is that we havetraded the mystery distance � for two new unknown num-bers
�and � . To find the coordinate
�for the Eastbound
car, we know the car is moving at the rate of �� ft/sec, soit will travel ���� feet after � seconds; i.e.,
� � ���� � Similarly,we find that ��� ���� � Substituting into the formula for �we arrive at
� � � ������ � � � ������ �� � � � � �� � �� ���� � � �
First, we need to convert hour and � minutes into seconds so thatour formula can be used:
1 hr 12 min � 1 + 12/60 hr� 1.2 hr
� �� � hr �
�60 min
hr � �60 secmin �
� 4,320 sec �Substituting � �
��� ��� sec and recalling that mile =
� � � � � feet, we arriveat
� � � � �� � � � � feet� 183,282 feet� 34.71 miles.
For the second question, we specify the distance being mile and wantto find when this occurs. The idea is to set � equal to mile and solve for� . However, we need to be careful, since the units for � are feet:���� � � � �
� � � � � �

2.4. DISTANCE 23
Solving for � :� �
� � � � ��� � �� 124.45 seconds� 2 minutes 4 seconds �
The two cars will be mile apart in � minutes,�
seconds.

24 CHAPTER 2. IMPOSING COORDINATES
2.5 ExercisesProblem 2.1. In the following four cases, let �be the initial (starting) point and � the endingpoint; recall Equation 2.2 and Figure 2.10 onPage 21. Compute � = the distance from � to� , � � and �� . Give your answer in exact form;eg.
�� is an exact answer, whereas 1.41 is an
approximation of�� .
(a) � ��� � � ��� � � ��� ��� ��� .(b) � ��� � � ��� � � ��� ����� ��� .(c) � ��� � ��� ��� � � ��� � �#� ��� .(d) � �� ��� ��� � � �� � � ����� � � ��� , where � is a
constant.
Problem 2.2. Start with two points � ��� � � ��and � �����"� ��� in the � � -coordinate system. Let� be the distance between these two points.Answer these questions and make sure youcan justify your answers:
(a) TRUE or FALSE: � ��� � � ����� � ���� � ��� � .(b) TRUE or FALSE: � ��� � � ����� � ��� � �� �� � .(c) TRUE or FALSE: � � � ��� ����� � ��� � �� �� � .(d) Suppose � is the beginning point and �
is the ending point; recall Equation 2.2and Figure 2.10 on Page 21. What is � � ?What is �� ?
(e) Suppose � is the beginning point and �is the ending point; recall Equation 2.2and Figure 2.10 on Page 21. What is � � ?What is �� ?
(f) If � � =0, what can you say about the re-lationship between the positions of thetwo points � and � ? If �� =0, what canyou say about the relationship betweenthe positions of the two points � and � ?(Hint: Use some specific values for thecoordinates and draw some pictures tosee what is going on.)
Problem 2.3. Steve and Elsie are camping inthe desert, but have decided to part ways.Steve heads North, at 6 AM, and walks steadilyat 3 miles per hour. Elsie sleeps in, and startswalking West at 3.5 miles per hour starting at8 AM.
When will the distance between them be 25miles?
Problem 2.4. Erik’s disabled sailboat is float-ing at a stationary location 3 miles East and2 miles North of Kingston. A ferry leavesKingston heading due East toward Edmondsat 12 mph. At the same time, Erik leaves thesailboat in a dinghy heading due South at 10ft/sec (hoping to intercept the ferry). Edmondsis 6 miles due East of Kingston.
North
sailboat
Edmonds
UDub
Kingston
BallardPSfrag replacements
-axis-axis
-axis
(a) Compute Erik’s speed in mph and theFerry speed in ft/sec.
(b) Impose a coordinate system and com-plete this table of data concerning loca-tions (i.e., coordinates) of Erik and theferry. Insert into the picture the loca-tions of the ferry and Erik after 7 min-utes.
Time Ferry Erik DistanceBetween
� sec��� sec
min� hr
(c) Explain why Erik misses the ferry.
(d) After 10 minutes, a Coast Guard boatleaves Kingston heading due East at aspeed of 25 ft/sec. Will the Coast Guardboat catch the ferry before it reaches Ed-monds? Explain.
Problem 2.5. Suppose two cars depart froma four way intersection at the same time, oneheading north and the other heading west. Thecar heading north travels at the steady speedof 30 ft/sec and the car heading west travelsat the steady speed of 58 ft/sec.

2.5. EXERCISES 25
(a) Find an expression for the distance be-tween the two cars after � seconds.
(b) Find the distance in miles between thetwo cars after 3 hours 47 minutes.
(c) When are the two cars 1 mile apart?
Problem 2.6. Allyson and Adrienne have de-cided to connect their ankles with a bungeecord; one end is tied to each person’s ankle.The cord is 30 feet long, but can stretch upto 90 feet. They both start from the same lo-cation. Allyson moves 10 ft/sec and Adriennemoves 8 ft/sec in the directions indicated.
Building
20 ft
30 ft
adri−N
allyson
start
PSfrag replacements
-axis-axis
-axis
(a) Where are the two girls located after 2seconds?
(b) After 2 seconds, will the slack in thebungee cord be used up?
(c) Determine when the bungee cord firstbecomes tight; i.e. there is no slackin the line. Where are the girls locatedwhen this occurs?
(d) When will the bungee cord first touchthe corner of the building? (Hint: Usea fact about “similar triangles”.)
Problem 2.7. Brooke is located 5 miles outfrom the nearest point � along a straightshoreline in her seakayak. Hunger strikes andshe wants to make it to Kono’s for lunch; seepicture. Brooke can paddle 2 mph and walk 4mph.
A
Brookeocean
Kono’s
6 mi
kayak reaches shore here5 mi
shorePSfrag replacements
-axis-axis
-axis
(a) If she paddles along a straight linecourse to the shore, find an expressionthat computes the total time to reachlunch in terms of the location whereBrooke beaches the boat.
(b) Determine the total time to reach Kono’sif she paddles directly to either the point“ � ”.
(c) Determine the total time to reach Kono’sif she paddles directly to Kono’s.
(d) Do you think your answer to (b) or (c) isthe minimum time required for Brooketo reach lunch?
(e) Determine the total time to reach Kono’sif she paddles directly to a point on theshore half way between point “ � ” andKono’s. How does this time compare tothe times in parts (b) and (c)? Do youneed to modify your answer to part (d)?
Problem 2.8. Nikki and Laura are standing onopposite sides of a hive of killer bees. The beescan fly 7.5 m/sec in still air and the wind isblowing 4.5 m/sec in the indicated direction.Notice, if the bees are flying upwind (againstthe wind), then the wind speed will decreasetheir ground speed. Likewise, if the bees areflying downwind (with the wind), then the windwill increase their ground speed. Two beesleave the hive; one is heading for Nikki and theother toward Laura. Assume that both womenstart running away from the hive at the sameinstant.
nikki
wind
laura
hive
20 m 26 m
PSfrag replacements
-axis-axis
-axis
(a) What is the ground speed of each bee?

26 CHAPTER 2. IMPOSING COORDINATES
(b) Assume each person runs 3.1 m/sec.Determine who escapes and whodoesn’t. If someone can’t escape, deter-mine where and when attack will occur.
(c) Determine the minimum speed eachmust run in order to avoid being stung.Is it realistic for Nikki to outrun thebees? How about Laura?
Problem 2.9. Using an ��� -coordinate system,plot the points � �� ��� ��� , � �� $� � ��� , � �� � � ��� ,� ��� � ��� � ��� , � ��� � ��� � �
� � , and � ��� � ��� ��� .(a) Use the distance formula to find:
(a1) The distance from � to�
.
(a2) The distance from � to � .
(a3) The distance from � to � .
(b) For each number � , define a point � � ���by the formula � � ��� �� � � ��� ��� . Plot thepoints � � ��� , � � �� � , � � ��� , � � � ��� , � � � � .
(c) Likewise, for each number � , de-fine a point � � ��� by the formula� � ��� ��� � ����� ��� ��� . Plot the points� � ��� � � � �� �� � � � ��� , � � � ��� � � � � � .
(d) Use the distance formula to compute thedistance between � � ��� and � � ��� . Yourformula will involve � .
(e) Find a value of � so that the distance be-tween � � ��� and � � ��� is 6. Where are thetwo points located for this value of � ?
Problem 2.10. A hang glider launches froma gliderport in La Jolla. The launch point islocated at the edge of a 500 ft. high cliff overthe Pacific Ocean. Impose three different coor-dinate systems: one with origin at the glider-port, one with the origin at the hang glider andthe third with origin at the boat location. An-swer these questions for each coordinate sys-tem separately.
500 feet
hang glider
boatOcean level
300 ft
75 ft
200 ft
210 ft
250 ft seagull
gliderport
PSfrag replacements
-axis-axis
-axis
(a) What are the coordinates of the hangglider?
(b) What are the coordinates of the seagull?
(c) What are the coordinates of the boat?
(d) What are the coordinates of the glider-port?
Problem 2.11. Plot the following four points inthe ��� plane: � ��� ��� ��� , � ��� ��� � ��� , � ��� � � � � ��� ,� �� � ��� ��� ; each axis will be scaled the sameand the units will be feet. Form the regionbounded by the line segments ��� � ��� � � � � � � .A bug begins at point � and starts movingaround the perimeter of the region in a clock-wise direction � inches/second; i.e., the bugwalks from � to � to � to
�to � , etc. Also,
assume the bug doesn’t slow down at the cor-ners.
(a) Sketch the region.
(b) Find the perimeter of the region.
(c) How long does it take the bug to com-plete one trip around the region?
(d) Where is the bug located after 8 sec-onds?
(e) When will the bug first cross the � -axis?
(f) When will the bug first cross the � -axis?
(g) During the bug’s first trip around the re-gion, when is it between � and
�?
Problem 2.12. A spider is located at the po-sition � ��� ��� in a coordinate system, where theunits on each axis are feet. An ant is located atthe position � �� � ��� in the same coordinate sys-tem. Assume the location of the spider after �minutes is � � ��� � � ��� ���� � ����� and the locationof the ant after � minutes is � � ��� ��� �� � ���� ���� .

2.5. EXERCISES 27
(a) Sketch a picture of the situation, indi-cating the locations of the spider and antat times ��� ��� ��� � � � � � � minutes. Labelthe locations of the bugs in your picture,using the notation � � � � , � � ��� ,..., � � �� , � � ��� ,� � ��� , ..., � � �� .
(b) When will the � -coordinate of the spiderequal ? When will the � -coordinate ofthe ant equal ?
(c) Where is the spider located when its� -coordinate is � ?
(d) Where is each bug located when the� -coordinate of the spider is twice aslarge as the � -coordinate of the ant?
(e) How far apart are the bugs when their� -coordinates coincide? Draw a pic-ture, indicating the locations of each bugwhen their � -coordinates coincide.
(f) A sugar cube is located at the position� �&� ! � . Explain why each bug will passthrough the position of the sugar cube.Which bug reaches the sugar cube first?
(g) Find the speed of each bug along its lineof motion; which bug is moving faster?
Problem 2.13. A Ferrari is heading south ata constant speed on Broadway (a north/southstreet) at the same time a Mercedes is headingwest on Aloha Avenue (an east/west street).The Ferrari is ! ��� feet north of the intersec-tion of Broadway and Aloha, at the same timethat the Mercedes is ����� feet east of the inter-section. Assume the Mercedes is traveling atthe constant speed of ��� miles/hour. Find thespeed of the Ferrari so that a collision occursin the intersection of Broadway and Aloha.
Problem 2.14. Two planes flying opposite di-rections (North and South) pass each other 80miles apart at the same altitude. The North-bound plane is flying 200 mph (miles per hour)and the Southbound plane is flying 150 mph.How far apart are the planes in 20 minutes?When are the planes 300 miles apart?
Problem 2.15. Here is a list of some algebraproblems with ”solutions.” Some of the solu-tions are correct and some are wrong. Foreach problem, determine: (i) if the answer iscorrect, (ii) if the steps are correct, (iii) identifyany incorrect steps in the solution (noting thatthe answer may be correct but some steps maynot be correct).
(a)
� � � �� � � � ��� ��� � ��� �
� � �
� ����
� � ��
� � � �
(b)
� � � � � � � � � � � � � � � � � � � � � � � � � � �� �
(c)
� � � ��� � �� � � ��� � ����� � ��� � �
� � � ���
� � � � � ��� � �� � � ���
� � � � ���
Problem 2.16. Assume � � � are nonzero con-stants. Solve for � .
(a) � � �� � ��������
(b) �� � �� � ��
(c) � � �� � ��
Problem 2.17. (a) Find � if
� �� � � � �
(b) Find � if
� � � � � ���� � ��� (c) Factor � � � � .(d) Expand and simplify � � � �� �� � � � �� �� .(e) Simplify as much as possible:
� �� �� � �
Problem 2.18. Simplify as far as possible.
(a) � � � ��� � � � � � ���� �(b) � ��� ��� � � � � � � ��� � � �(c) �� � � � ����
� (write as a single fraction)
(d) � � � ����� � � � � �

28 CHAPTER 2. IMPOSING COORDINATES

Chapter 3
Three Simple Curves
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axisA typical curve.
Figure 3.1: A typical curve.
Before we discuss graphing, we first want to become ac-quainted with the sorts of pictures that will arise. This issurprisingly easy to accomplish: Impose an � -coordinatesystem on a blank sheet of paper. Take a sharp pencil andbegin moving it around on the paper. The resulting pic-ture is what we will call a curve. For example, here is asample of the sort of “artwork” we are trying to visualize.A number of examples in the text will involve basic curvesin the plane. When confronted with a curve in the plane,the fundamental question we always try to answer is this:Can we give a condition (think of it as a “test”) that willtell us precisely when a point in the plane lies on a curve?
Typically, the kind of condition we will give involves an equation intwo variables (like and � ). We consider the three simplest situations inthis chapter: horizontal lines, vertical lines and circles.
3.1 The Simplest Lines
PSfrag replacements
� -axis
� -axis
-axis
����������� ������ �������� � ������, a typical point.
�
Figure 3.2: The points � � � � � .
Undoubtedly, the simplest curves in the plane are thehorizontal and vertical lines. For example, sketch a lineparallel to the -axis passing through 2 on the � -axis; theresult is a horizontal line � , as pictured. This means theline � passes through the point
� � � � � in our coordinate sys-tem. A concise symbolic prescription for ALL of the pointson � can be given using “set notation”:
� � � � �� � � � is any real number � �We read the right-hand side of this expression as “the set of all points� �� � � where � any real number.” Notice, the points
� � � � on the line �are EXACTLY the ones that lead to solutions of the equation ��� � ; i.e.,take any point on this line, plug the coordinates into the equation � � �
29

30 CHAPTER 3. THREE SIMPLE CURVES
and you get a true statement. Because the equation does not involve thevariable and only constrains � to equal 2, we see that can take on anyreal value. In short, we see that plotting all of the solutions
� � � � to theequation � ��� gives the line � . We usually refer to the set of all solutionsof the equation � ��� as the graph of the equation � ��� .
PSfrag replacements
� -axis
� -axis
-axis
�
��������, a typical point.
��������
����� ���
������� � �
Figure 3.3: Stacked points.
As a second example, sketch the vertical line � pass-ing through on the -axis; this means the line � passesthrough the point
� � � � in our coordinate system. A con-cise symbolic prescription for ALL of the points on � canbe given using “set notation”:
� � � � � � � � � is any real number� �Notice, the points
� � � � on the line � are EXACTLYthe ones that lead to solutions of the equation � ; i.e.,take any point on this line, plug the coordinates into theequation � and you get a true statement. Because theequation does not involve the variable � and only specifies
that � , � can take on any real number value. Plotting all of thesolutions
� �� � � to the equation � gives the line � . We usually refer tothe set of all solutions of the equation � as the graph of the equation � .
These two simple examples highlight our first clear connection be-tween a geometric figure and an equation; the link is achieved by plot-ting all of the solutions
� � � � of the equation in the � -coordinate system.These observations work for any horizontal or vertical line.
Definition 3.1.1. Horizontal and Vertical Lines: A horizontal line �passing through
�on the � -axis is precisely a plot of all solutions
� �� � � ofthe equation � � �
; i.e., � is the graph of � � �. A vertical line � pass-
ing through�
on the -axis is precisely a plot of all solutions� � � � of the
equation � �; i.e., � is the graph of � �
.
3.2 CirclesAnother common curve in the plane is a circle. Let’s see how to relatea circle and an equation involving the variables and � . As a specialcase of the distance formula (2.3), suppose � � � � � � � is the origin and
� � � � � � is any point in the plane; then
distance from � to � � � � � � � � �� � � � �
� � ��� � �This calculation tells us that a point
� � � � is of distance � from the originif and only if � � � ��� � or, squaring each side, that � � � � � � � . Thisshows� � � � � �distance
� �� � � to origin is � � � � � � � � � � ��� � ��� � � � (3.1)

3.2. CIRCLES 31PSfrag replacements
-axis
-axis
-axis
�� Pencil.
Start. Draw with atight string.
Figure 3.4: Drawing a circle.
What is the left-hand side of Equation 3.1? To pic-ture all points in the plane of distance � from the origin,fasten a pencil to one end of a non-elastic string (a stringthat will not stretch) of length � and tack the other end tothe origin. Holding the string tight, the pencil point willlocate a point of distance � from the origin. We could visu-alize all such points by simply moving the pencil aroundthe origin, all the while keeping the string tight.
What is the right-hand side of Equation 3.1? A point� �� � � in the
right-hand set is a solution to the equation � � � � ��� � ; i.e., if we plug inthe coordinates we get a true statement. For example, in Figure 3.5 weplot eight solutions
� � � � � , � � � � � � , � � � � � , � � � � � � , � �� �� � � �� ��� , � �
� �� � � � �� ��� ,� ��
� �� � � � �� ��� , � ��
� �� � � �� ��� , of the equation. To see that the last point is
a solution, here is the sample calculation:�
� �� ��� � � � �� ��� � � � �� � � �� � � � �
PSfrag replacements
-axis
-axis
-axis
� ��������� �� �
� �� � ����
��� ���� � �Figure 3.5: Computing
points.
Since the two sides of Equation 3.1 are equal, drawingthe circle of radius � is the same as plotting all of the solu-tions of the equation � � � � ��� � . The same reasoning canbe used to show that drawing a circle of radius � centeredat a point
� � � � � is the same as plotting all of the solutionsof the equation:
� � � � � � �� � � � � ��� � � We usually refer to
the set of all solutions of the equation as the graph of theequation.
PSfrag replacements
� -axis
� -axis
-axis �� ��� ��� � � ��
Figure 3.6: Defining a circle.
Definition 3.2.1 (Circles). Let� � � � � be a given point in the
� -plane and � ��� a given positive real number. The circleof radius � centered at
� � � � � is precisely all of the solutions� �� � � of the equation� � � � � � �
� � � � � ��� � �i.e., the circle is the graph of this equation.
We refer to the equation in the box as the standardform of the equation of a circle. From this equation youknow both the center and radius of the circle described.

32 CHAPTER 3. THREE SIMPLE CURVES
Be very careful with the minus signs “ � ” in the standard form for a circleequation. For example, the equation
��� � ��� � � ��� � ��� � � �is NOT in standard form. We can rewrite it in standard form:
��� � � � ���� � � ��� � ��� � � � � � ��so, this equation describes a circle of radius � centered at
� � ��� ��� .
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis
Examples 3.2.2. Here are some of the ways we can discuss circles:
1. The circle of radius 1 centered at the origin is the graph of the equation � � � � � . This circle is called the unit circle and will be usedextensively.
2. A circle of radius 3 centered at the point� � � � � � �
� � � is the graph ofthe equation
� � � � � � � � � � � � � � � ; or, equivalently� � � � � � � � � � � � � or, equivalently � ��� � � � � � � � � �
3. The circle of radius� �
centered at� � � � � does not pass through the
origin; this is because� � � � � is not a solution of the equation
� � � � � ��� � � � � �
.
3.3 Intersecting Curves IIn many problem solving situations, we will have two curves in the planeand need to determine where the curves intersect one another. Beforewe discuss a general procedure, let’s make sure we really understandthe meaning of the word “intersect.” From Latin, the word “inter” means“within or in between” and the word “sectus” means “to cut.” So, theintersection of two curves is the place where the curves “cut into” eachother; in other words, where the two curves cross one another.
If the pictures of two curves are given to us up front, we can oftenvisually decide whether or not they intersect. This is one good reason fordrawing a picture of any physical problem we are trying to solve. We willneed a small bag of tricks used for finding intersections of curves. Webegin with intersections involving the curves studied in this section.
Two different horizontal lines (or two different vertical lines) will neverintersect. However, a horizontal line always intersects a vertical line ex-actly once; Figure 3.7(a). Given a circle and a horizontal or vertical line,we may or may not have an intersection. Looking at Figure 3.7(b), youcan convince yourself a given horizontal or vertical line will intersect acircle in either two points, one point or no points. This analysis is all pic-torial; how do you find the explicit coordinates of an intersection point?Let’s look at a sample problem to isolate the procedure used.

3.3. INTERSECTING CURVES I 33PSfrag replacements
� -axis
� -axis-axis
Verticalline:
�� �
.
Horizontalline:� � � .
Point:� � ��� � .
(a) Line equations.
PSfrag replacements
-axis
-axis
-axisVerticalline:
.Horizontalline:
.Point:
.
(b) Possible intersections.
Figure 3.7: Circles and lines.
Example 3.3.1. Glo-Tek Industries has designed a new halogen streetlight fixture for the city of Seattle. According to the product literature, whenplaced on a
� � foot light pole, the resulting useful illuminated area is acircular disc ��� feet in diameter. Assume the light pole is located ��� feeteast and
�� feet north of the intersection of Parkside Ave. (a north/south
street) and Wilson St. (an east/west street). What portion of each street isilluminated?
PSfrag replacements
� -axis
� -axis
-axis
(Wilson)
(Parkside)Illuminatedzone.
�
�
��
Figure 3.8: Illuminatedstreet.
Solution. The illuminated area is a circular disc whose di-ameter and center are both known. Consequently, wereally need to study the intersection of this circle with thetwo streets. Begin by imposing the pictured coordinatesystem; we will use units of feet for each axis. The illumi-nated region will be a circular disc centered at the point� ��� �
�� � in the coordinate system; the radius of the disc
will be � � � � feet.We need to find the points of intersection � , � ,
�, and �
of the circle with the -axis and the � -axis. The equationfor the circle with � � � � and center
� � � � � � � ��� ��� � is
� � ��� � � � �� �
�� � � � � � � �
To find the circular disc intersection with the � -axis, wehave a system of two equations to work with:
� � ��� � � � �� �
�� � � � �� � � � � � �
To find the intersection points we simultaneously solve both equations.To do this, we replace � � in the first equation (i.e., we impose the

34 CHAPTER 3. THREE SIMPLE CURVES
conditions of the second equation on the first equation) and arrive at� �� ��� � � � �� �
�� � � � �� � � ��
� � � �� �
�� � � � �� � � ��
� ��� � � � � ��� � ��
� ��� � � �
� � ��� �� �
���� � � ��� �
� � � � � �or� � � � � �
Notice, we have two solutions. This means that the circle and � -axisintersect at the points � � � � � � � � � � � and � � � � � � � � � � � . Similarly, to findthe circular disc intersection with the -axis, we have a system of twoequations to work with:� � ��� � � � �
� ��� � � � �� � � �� � � �
Replace � � � in the first equation (i.e., we impose the conditions of thesecond equation on the first equation) and arrive at� � ��� � � � � ��
�� � � � �� � � �� � ��� � � � � ��� � � �� � ��� � � �
� � ��� � � � � ����� � � ��� � �
� � ��� � � or � � � � � �
Conclude the circle and -axis intersect at the points � � � � � � � � � � � and� � � � ��� � � � � � .
The procedure we used in the solution of Example 3.3.1 gives us ageneral approach to finding the intersection points of circles with hori-zontal and vertical lines; this will be important in the exercises.

3.4. EXERCISES 35
3.4 ExercisesProblem 3.1. This exercise emphasizes the“mechanical aspects” of circles and their equa-tions.
(a) Find an equation whose graph is a circleof radius � centered at � � � � � � .
(b) Find an equation whose graph is a cir-cle of diameter �
� centered at the point� � � � ���$ � .
(c) Find four different equations whosegraphs are circles of radius � through� ��� ��� .
(d) Consider the equation � � � ��� � � � � � ��� � �� . Which of the following points lie onthe graph of this equation: � ��� ��� , � ����� ��� ,� ���#� � � , � ��� �
� � ��� � � � � � � � �� � , � ��� ��� .
Problem 3.2. Water is flowing from a majorbroken water main at the intersection of twostreets. The resulting puddle of water is circu-lar and the radius � of the puddle is given bythe equation � � ���
� feet, where � represents
time in minutes elapsed since the the mainbroke. When the main broke, a runner was lo-cated 6 miles from the intersection. The run-ner continues toward the intersection at theconstant speed of 12 miles per hour. Whenand where will the runner’s feet get wet?
Problem 3.3. The equation� ���� � �
� � �� � � �
defines an ellipse; i.e., the graph of all points� � � � � satisfying the equation will be an ellipsein the � � -plane.
(a) If � � � and � � , sketch the ellipse withthe above equation; do this by plottingall of the points with � � � , � � , � � or� � � , � � , � � , � � .
(b) Each of these equations can be put inthe ”standard form” above; find the ap-propriate ” � ” and ” ” to do this:
(i) � � � � � � �(ii) � � � � � � � �(iii) � � � � � � � � �(iv) � � � � � � � �
(c) Find where the horizontal line � � � andvertical line � � � � intersect the ellipsein (a).
Problem 3.4. An amusement park FerrisWheel has a radius of 60 feet. The center ofthe wheel is mounted on a tower 62 feet abovethe ground (see picture). For these questions,the wheel is not turning.
100 feet
24 feet
ground level
operator
rider
60 feet
62 ft. tower
PSfrag replacements
-axis-axis
-axis
(a) Impose a coordinate system.
(b) Suppose a rider is located at the point inthe picture, 100 feet above the ground.If the rider drops an ice cream conestraight down, where will it land on theground?
(c) The ride operator is standing 24 feet toone side of the support tower on the levelground at the location in the picture.Determine the location(s) of a rider onthe Ferris Wheel so that a dropped icecream cone lands on the operator. (Note:There are two answers.)
Problem 3.5. Aleko’s Pizza has delivered abeautiful 16 inch diameter pie to Lee’s dormroom. The pie is sliced into 8 equal sizedpieces, but Lee is such a non-conformist hecuts off an edge as pictured. John then takesone of the remaining triangular slices. Whohas more pizza and by how much?

36 CHAPTER 3. THREE SIMPLE CURVES
John’s part
Lee’s part
PSfrag replacements
-axis-axis
-axis
Problem 3.6. A crawling tractor sprinkler islocated as pictured below, ����� feet South of asidewalk. Once the water is turned on, thesprinkler waters a circular disc of radius ���feet and moves North along the hose at the rateof �
� inch/second. The hose is perpendicularto the 10 ft. wide sidewalk. Assume there isgrass on both sides of the sidewalk.
hose
tractor sprinkler
sidewalk
N
S
W E
PSfrag replacements
-axis-axis
-axis
(a) Impose a coordinate system. Describethe initial coordinates of the sprinklerand find equations of the lines formingthe North and South boundaries of thesidewalk.
(b) When will the water first strike the side-walk?
(c) When will the water from the sprinklerfall completely North of the sidewalk?
(d) Find the total amount of time water fromthe sprinkler falls on the sidewalk.
(e) Sketch a picture of the situation after 33minutes. Draw an accurate picture ofthe watered portion of the sidewalk.
(f) Find the area of GRASS watered afterone hour.
Problem 3.7. Erik’s disabled sailboat is float-ing stationary 3 miles East and 2 miles Northof Kingston. A ferry leaves Kingston headingtoward Edmonds at 12 mph. Edmonds is 6miles due east of Kingston. After 20 minutesthe ferry turns heading due South. Ballard is8 miles South and 1 mile West of Edmonds.Impose coordinates with Ballard as the origin.
North
sailboat
Edmonds
UDub
Kingston
BallardPSfrag replacements
-axis-axis
-axis
(a) Find the equations for the lines alongwhich the ferry is moving and draw inthese lines.
(b) The sailboat has a radar scope that willdetect any object within 3 miles of thesailboat. Looking down from above, asin the picture, the radar region lookslike a circular disk. The boundary isthe ”edge” or circle around this disc, theinterior is the inside of the disk, andthe exterior is everything outside of thedisk (i.e. outside of the circle). Givea mathematical (equation) description ofthe boundary, interior and exterior ofthe radar zone. Sketch an accurate pic-ture of the radar zone by determiningwhere the line connecting Kingston andEdmonds would cross the radar zone.
(c) When does the ferry enter the radarzone?
(d) How would you determine where andwhen the ferry exits the radar zone?
(e) How long does the ferry spend inside theradar zone?

3.4. EXERCISES 37
Problem 3.8. Draw the graphs of � � � ��� � � �and a circle of radius 4 centered at the point(2,3) in the � � coordinate system. Let � be thepoint where the horizontal and vertical line in-tersect.
(a) Determine where the vertical line andthe horizontal line intersect the circle;i.e., find the coordinates of the intersec-tions. Label all points of intersection inyour picture.
(b) An ant starts at the location (6,2) andmoves to the left along the line � � � . As-sume the position of the ant after � sec-onds is the point � � ��� � � ! � ���� ��� . Plotthe ant locations � � ��� � � � ��� � � � ��� � � � � �
(c) At the same instant, a spider starts atthe location (-1,-3) and moves upwardalong the line � � � � . Assume the po-sition of the spider after � seconds is thepoint � � ��� � � � ����� � � ��� . Plot the spiderlocations � � ��� � � � ��� � � � � � � � � !��
(d) When will the ant exit the circular zone?When will the spider enter the circularzone?
(e) Which bug reaches the point � first?
(f) Use the distance formula to find the dis-tance between the ant and the spiderat time � seconds. Your answer willinvolve � .
(g) For times � � � � � � � , draw a line segmentconnecting � � ��� and � � ��� and computeits length; i.e., plot � � ��� and � � � � andconnect these by a line segment, etc.
Problem 3.9. Nora spends part of her sum-mer driving a combine during the wheat har-vest. Assume she starts at the indicated posi-tion heading east at 10 ft/sec toward a circularwheat field of radius 200 ft. The combine cutsa swath 20 feet wide and begins when the cor-ner of the machine labeled “a” is 60 feet northand 60 feet west of the western-most edge ofthe field.
N
S
W E
swath cut
wheat field
center
a
combine 20 ft
PSfrag replacements
-axis-axis
-axis
(a) When does Nora’s rig first start cuttingthe wheat?
(b) When does Nora’s rig first start cutting aswath 20 feet wide?
(c) Find the total amount of time wheat isbeing cut during this pass across thefield.
(d) Estimate the area of the swath cut dur-ing this pass across the field.
Problem 3.10. (a) Solve for � :
� � � � � � �� � � � � �
(b) Solve for � :
� � �� � � � �
(c) If � � � � , find ALL solutions of the equa-tion
� � � ��� � � � � � ��� � � ���
(d) If � � � , find ALL solutions of the equa-tion
� � � ��� � � � � � � ��� � � ���

38 CHAPTER 3. THREE SIMPLE CURVES

Chapter 4
Linear Modeling
Sometimes, we will begin a section by looking at a specific problem whichhighlights the topic to be studied; this section offers the first such vista.View these problems as illustrations of precalculus in action, rather thanconfusing examples. Don’t panic, the essential algebraic skills will bereviewed once the motivation is in place.
4.1 The Earning Power ProblemThe government likes to gather all kinds of data. For example, Table 4.1contains some data on the average annual income for full-time work-ers; these data were taken from the 1990 Statistical Abstract of the U.S.Given this information, a natural question would be: How can we predictthe future earning power of women and men? One way to answer this
YEAR WOMEN (dollars)1970 $5,6161987 $18,531
(a) Women.
YEAR MEN (dollars)1970 $9,5211987 $28,313
(b) Men.Table 4.1: Earning power data.
question would be to use the data in the table to construct two differentmathematical models that predict the future (or past) earning power forwomen or men. In order to do that, we would need to make some kind ofinitial assumption about the type of mathematical model expected. Let’sbegin by drawing two identical � -coordinate systems, where the -axishas units of “year” and the � -axis has units of “dollars;” see Figure 4.1. Ineach coordinate system, the data in our table gives us two points to plot:In the case of women, the data table gives us the points ��� �
� � � � � �� � �and � � �
� � � � � � � � . Likewise, for the men, the data table gives us thepoints
� � � � � � � � � � � � and � � �
� � � � � � �� � � .39

40 CHAPTER 4. LINEAR MODELING
aca
30000
25000
20000
15000
10000
5000
1995
1990
1985
1980
1975
1970
PSfrag replacements
-axis
-axis
-axis
� -axis (dollars)
� -axis (year)
��� � � ��� � � ��� � � �
� � � ���� � � � � � �
(a) Data points forwomen.
30000
25000
20000
15000
10000
5000
1995
1990
1985
1980
1975
1970
PSfrag replacements
-axis
-axis
-axis
� -axis (dollars)
� -axis (year)
� � � � ��� � � ��� � ���
� � � � ���� � �� � � � �
(b) Data points for men.
Figure 4.1: Visualizing the data.
To study the future earning power of men and women, we are goingto make an assumption: For women, if the earning power in year is $� ,then the point
� �� � � lies on the line connecting � and � . Likewise, formen, if the earning power in year is $� , then the point
� �� � � lies on theline connecting
�and � .
In the real world, the validity of this kind of assumption would involvea lot of statistical analysis. This kind of assumption leads us to whatis called a linear model, since we are demanding that the data pointspredicted by the model (i.e., the points
� � � � ) lie on a straight line in acoordinate system. Now that we have made this assumption, our job isto find a way to mathematically describe when a point
� �� � � lies on oneof the two lines pictured in Figure 4.2.
Our goal in the next subsection is to review the mathematics nec-essary to show that the lines in Figure 4.2 are the so-called graphs ofEquations 4.1 and 4.2.
����� ����� �� � � � � � �� � � � � � � � � � � � � � � � � � �� � (4.1)
� � � � � � � � � � � � � � �� �
� ����� �� � � �� � � � � � �
� � � � � � � � � � � � � � � � � � � (4.2)
� � � � � � � � � � � � � � � � � �
4.2 Relating Lines and Equations
A systematic approach to studying equations and their graphs wouldbegin with the simple cases, gradually working toward the more com-

4.2. RELATING LINES AND EQUATIONS 41
30000
25000
20000
15000
10000
5000
1995
1990
1985
1980
1975
1970
PSfrag replacements
-axis
-axis
-axis
� -axis (dollars)
� -axis (year)
� � � � ��� � � ��� � ���
� � � � �� � � � � � �� � � �� on the line: Thismeans women earn
�dollars in year � .
�
�
(a) Linear model forwomen.
30000
25000
20000
15000
10000
5000
1995
1990
1985
1980
1975
1970
PSfrag replacements
-axis
-axis
-axis
� -axis (dollars)
� -axis (year)
��� � � ��� � � � � � � �
� � � � ���� � �� � � � �� � � �� on the line:This means menearn
�dollars in
year � .
�
�
(b) Linear model for men.
Figure 4.2: Linear models of earning power.
plicated. Thinking visually, the simplest curves in the plane would bestraight lines. As we discussed in Chapter 3, a point on the vertical linein Figure 4.3(a) will always have the same -coordinate; we refer to thisline as the graph of the equation � �
. Likewise, a point on the horizon-tal line in Figure 4.3(b) will always have the same � -coordinate; we referto this line as the graph of the equation � � �
. Figure 4.3(c) is different,in the sense that neither the nor the � coordinate is constant; i.e., asyou move a point along the line, both coordinates of the point are chang-ing. It is reasonable to guess that this line is the graph of some equationinvolving both and � . The question is: What is the equation?
PSfrag replacements
� -axis
� -axis-axis
graph of ��� �
� ��� �is a typical
point on this line.
location�
on � -axis
(a) Vertical line.
PSfrag replacements
� -axis
� -axis-axis� � � � is a typicalpoint on this line
graph of � �
location�
on
-axis
(b) Horizontal line.
PSfrag replacements
� -axis
� -axis-axis� � � �� is a typicalpoint on this line
graph of someequation involving� and
�
(c) Sloped line.
Figure 4.3: Lines in a plane.

42 CHAPTER 4. LINEAR MODELING
Here is the key geometric fact needed to model lines by mathematicalequations:
Important Fact 4.2.1. Two different points completely determine a straightline.
This fact tells us that if you are given two different points on a line, youcan reconstruct the line in a coordinate system by simply lining a rulerup with the two points. In our discussion, we will need to pay specialattention to the difference between vertical and non-vertical lines.
4.3 Non-vertical Lines
Assume in this section that � is a non-vertical line in the plane; for ex-ample, the line in Figure 4.3(c). If we are given two points � � � � � � � �and � � � � � � � � on a line � , then Equation (2.2) on page 20 defined twoquantities we can calculate:
� � change in going from � to � �� � � � �� � � change in � going from � to � � � � � � � �
We define the slope of the line � to be the ratio of � � by � , which isusually denoted by � :
� def� � �� (4.3)
� � � ��� � � � �slope of � � change in �
change in Notice, we are using the fact that the line is non-vertical to know that
this ratio is always defined; i.e., we will never have � � � (which wouldlead to illegal division by zero). There is some additional terminology thatgoes along with the definition of the slope. The term � � is sometimescalled the rise of � and � is called the run of � . For this reason, peopleoften refer to the slope of a line � as “the rise over the run,” meaning
slope of � def� rise of �run of � � � �
� � � �
In addition, notice that the calculation of � � involves taking the differ-ence of two numbers; likewise, the calculation of � involves taking thedifference of two numbers. For this reason, the slope of a line � is some-times called a difference quotient.

4.3. NON-VERTICAL LINES 43
PSfrag replacements
-axis
-axis
-axis
� � �� � � �
�� � � � �� � � �
��� �
�
�
�
Figure 4.4: Computing theslope of a line.
For example, suppose � � � � � and � � � � � � � lie on a
line � . In this case, the rise � � � ��
and the run � � � ,so � ���� is the slope of � .
When computing � , pay special attention that it isthe -coordinate of the destination point � minus the -coordinate of the starting point � ; likewise, when com-puting � � , it is the � -coordinate of the destination point
� minus the � -coordinate of the starting point � . We canreverse this order in both calculations and get the sameslope:
� � � �� � � � ��� � � � �
� � � � � � � � �� � � � � �
� � � ��� � � � �� � � �� � �
We CANNOT reverse the order in just one of the calculations and getthe same slope:
� � � � � ���� � � ��� �� � � � ���
��� � � � � and � � � � � ���� � � ��� �� ��� � � �� � � ��� �
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis
PSfrag replacements
-axis
-axis
-axis
� ��� ��� �
� ��� ��� � �
��� �
�
� ����� � ��� � �
� ��� � �
�
� � � � ����� � ���
����� ���
�
��� �
�
Figure 4.5: Using similar tri-angles.
It is very important to notice that the calculation of theslope of a line does not depend on the choice of the twopoints � and � . This is a real windfall, since we are thenalways at liberty to pick our favorite two points on theline to determine the slope. The reason for this freedomof choice is pretty easy to see by looking at a picture.If we were to choose two other points ��� � � �� � � ��� � � and
� � � � �� � � �� � on � , then we would get two similar righttriangles: See Figure 4.5.
Basic properties of similar triangles tell us ratios oflengths of common sides are equal, so that
� � � � ��� � � � �� ���� � ��� � �� � � �
�
but this just says the calculation of the slope is the same for any pair ofdistinct points on � . For example, lets redo the slope calculation when
� � � ��� � � � � � � and � � � � �� � � represents an arbitrary point on the line.Then the two ratios of lengths of common sides give us the equation
� � � � � � � ��
� � � � � �� � � � �

44 CHAPTER 4. LINEAR MODELING
This can be rewritten as
� � �� � � � � � � (4.4)
or
� ��� � ��� � � � � � � � � � � � � � (4.5)
Equation 4.4 is usually called the point slope formula for the line � (sincethe data required to write the equation amounts to a point
� � � � � � onthe line and the slope � ), whereas Equation 4.5 is called the two pointformula for the line � (since the data required amounts to the coordinatesof the points � and � ). In any event, we now see that
Important Fact 4.3.1.� � � � lies on � if and only if
� �� � � is a solution to� � �
� � � � � � � .We can plot the collection of ALL solutions to the equation in Fact 4.3.1,
which we refer to as the graph of the equation. As a subset of the � -coordinate system, the line
Important Fact 4.3.2. � � � � �� � � � � � ��� � �� is any real number� �
PSfrag replacements
-axis
-axis
-axis
graph of� �
� �� �
�� � ��� � ���
��� � � �� � � � �� ��� �
���� � � � ���
��
Figure 4.6: Verifying pointson a line.
Example 4.3.3. Consider the line � , in Figure 4.6, throughthe two points � � �
� � and � � � � � � � . Then the slopeof � is � �
� � and � consists of all pairs of points� �� � �
such that the coordinates and � satisfy the equation � �� � � � � � � Letting � � � � � and � , we conclude thatthe following four points lie on the line � : � � � � � � � � � � ���� � � � �� � , � � � � � � � � � � �
� � , � � � � � � � � � � � � � � � � �� � and� � � � � � � � � � � � � � � � � � . By the same reasoning, thepoint
� � ��� � does not lie on the line � . As a set of points in theplane, we have
���� �
���
� � � � � � is any real number �Returning to the general situation, we can obtain a third general equa-
tion for a non-vertical line. To emphasize what is going on here, plug thespecific value � � into Equation 4.4 and obtain the point
� � � � � � � onthe line, where � � �
� � �� � � � � � � � � � � � � . But, Equation (4.4) can bewritten
� � �� � � � ��� �� � � � � ��� �� � � � �

4.4. GENERAL LINES 45
The point�
is important; it is precisely the point where the line �crosses the � -axis, usually called the � -intercept. The slope interceptequation of the line is the form
� � � � � �where the slope of the line is � and � is the � -intercept of the line.
Summary 4.3.4. Non-vertical Lines: Let � be a non-vertical line in the � -plane. There are three ways to obtain an equation whose graph is � ,depending on the data provided for � :
1. If ��� � � � � � � � � � � � � � � � are two different points on the line, then
the two-point formula � ��� � ��� � � � � � � � � � � � � gives an equation
whose graph is � .2. If � � � � � � � � is a point on the line and � is the slope of � , then
the point-slope formula � � �� � � � � � � gives an equation whose
graph is � .3. If the line � intersects the � -axis at the point
� � � � � and � is the slopeof the line � , then the slope-intercept formula � � � � � gives anequation whose graph is � .
4.4 General LinesSummarizing, any line in the plane is the graph of an equation involving and � and the equation always has the form
� � ��� � � � � �for some constants � , � ,
�. Equations like this are called linear equa-
tions. In general, non-vertical lines will be of the most interest to us,since these are the lines that can be viewed as the graphs of functions;we will discuss this in Chapter 5.
4.5 Lines and Rate of ChangeIf we draw a non-vertical line in the � coordinate system, then its slopewill be the rate of change of � with respect to :
slope � � ��
� change in �change in
def� rate of change of � with respect to �

46 CHAPTER 4. LINEAR MODELING
We should emphasize that this rate of change is a constant; in otherwords, this rate is the same no matter where we compute the slope onthe line. The point-slope formula for a line can now be interpreted asfollows:
A line is determined by a point on the line and the rate of change of �with respect to .
An interesting thing to notice is how the units for and � figure intothe rate of change calculation. For example, suppose that we have theequation � � � � � � � � ��� � � � � � , which relates the value � of a house (in dol-lars) to the number of years you own it. For example, after 5 years, � �and the value of the house would be � � � � � � � ��� � � ��� � � � � ��� $ � � � ��� � � �In this case, the equation � � � � � � � � ��� � � � � � is linear and already writ-ten in slope-intercept form, so the slope can be read as � � � ��� � � . If
we carry along the units in the calculation of� �� , then the numerator
involves “dollar” units and the denominator “years” units. That meansthat carrying along units, the slope is actually � � � � � � � dollars/year.In other words, the value of the house is changing at a rate of � � � � �dollars/year.
At the other extreme, if the units for both and � are the same, thenthe units cancel out in the rate of change calculation; in other words,the slope is a unit-less quantity, simply a number. This sort of thing willcome up in the mathematics you see in chemistry and physics.
PSfrag replacements
-axis
-axis
-axis
referencepoint
initial locationof the object
location of the ob-ject at time �
speed �
��
Figure 4.7: Motion along aline.
One important type of rate encountered is the speedof a moving object. Suppose an object moves along astraight line at a constant speed � : See Figure 4.7.
If we specify a reference point, we can let � be the start-ing location of the moving object, which is usually calledthe initial location of the object. We can write down anequation relating the initial location � , the time � , the con-stant speed � and the location at time � :
� (location of object at time � ) � (initial location of object) + (distance object travels in time � ) � � � � � �
where � is in the same time units used to define the rate � . Notice, both� and � would be constants given to us, so this is a linear equationinvolving the variables and � . We can graph the equation in the �� -coordinate system: See Figure 4.8.
PSfrag replacements
-axis
-axis
-axis
� -axis
-axis
graph of � � � ��� �
rate of change��� �
� �� � � -intercept
� �
� �
Figure 4.8: The graph of� � � � �� .
It is important to distinguish between this picture (thegraph of � � � � � ) and the path of the object in Fig-ure 4.7. The graph of the equation should be thought ofas a visual aid attached to the equation � � � � � . Thegeneral idea is that using this visual aid can help answervarious questions involving the equation, which in turn

4.5. LINES AND RATE OF CHANGE 47
will tell us things about the motion of the object in Fig-ure 4.7.
Two other comments related to this discussion are im-portant. First, concerning notation, the speed � is often
symbolized by � to denote constant velocity and � is written as � (thesubscript “ � ” meaning “time zero”). With these changes, the equationbecomes � � � � � , which is the form in which it would be written in atypical physics text. As a second note, if you return to Figure 4.8, you willnotice we only drew in the positive � axis. This was because � representedtime, which is always a non-negative quantity.
Example 4.5.1. Linda, Asia and Mookie are all playing frisbee. Mookie is10 meters in front of Linda and always runs 5 m/sec. Asia is 34 metersin front of Linda and always runs 4 m/sec. Linda yells “go!” and bothMookie and Asia start running directly away from Linda to catch a tossedfrisbee. Find linear equations for the distances between Linda, Mookie andAsia after � seconds.
PSfrag replacements
-axis
-axis
-axis
Linda Mookie Asia
Solution. Let � be the distance between Linda and Mookie and �� thedistance between Linda and Asia, after � seconds. An application of theabove formula tells us
� � (initial distance between Linda and Mookie) � � (distance Mookie runs in � seconds)
� � � � � � �Likewise,
�� � (initial distance between Linda and Asia) � � (distance Asia runs in � seconds)
�� � � � � � �If � � is the distance between Mookie and Asia after � seconds, we com-pute
� ��� �� � � � � � � � ��� � � � � � ��� � � �
�� ��� meters �
In all cases, the distances we computed are given by linear equations ofthe form � � � � � , for appropriate � and rate � .

48 CHAPTER 4. LINEAR MODELING
4.6 Back to the Earning Power Problem19
75
1980
1990
40000
35000
30000
25000
20000
15000
10000
5000
1970
1985
1995
PSfrag replacements
-axis
-axis
-axis
��
�
� � � �� on the line:means men earn
�dollars in year �
�
� -axis (year)
� -axis (dollars)
�
�
Figure 4.9: Linear model ofMen’s Earning Power.
We now return to the motivating problem at the start ofthis section. Recall the plot in Figure 4.1(b). We canmodel the men’s earning power using the first and lastdata points, using the ideas we have discussed about lin-ear equations. To do this, we should specify a “beginningpoint” and an “ending point” (recall Figure 2.9) and cal-culate the slope:
�������� � � �
� � � � � � � � �and
� ��� � � � � � � � � � � � � �
We find that
� � � �
� � � � � � � � � � � � � � � � � ��
� � � � � � � � � � � �
If we apply the “point-slope formula” for the equation of a line, wearrive at the equation:
� � � � � � � � � � � � � � � � � � � � (4.6)
The graph of this line will pass through the two points�
and � in Fig-ure 4.2. We can describe ALL points on the graph of this equation usingFact 4.3.2 on page 44; here is how we would describe the portion relevantto the years between 1970 and 2000:
Men’s Earning Curve �� � � � �
� � � � � � � � � � � � � � � � ����
� � � � ��� � � � (4.7)
We sketch the graph in Figure 4.9, indicating two new points � and � .We can use the model in (4.6) to make predictions of two different
sorts: (i) predict earnings at some date, or (ii) predict when a desiredvalue for earnings will occur. For example, let’s graphically discuss theearnings in 1995:

4.6. BACK TO THE EARNING POWER PROBLEM 49
� Draw a vertical line � � � � up to the graph and label the intersec-tion point � .
� Draw a horizontal line � through � . The line � crosses the � axis atthe point
� � � � � � �
� � � � � � � � � � � � � � � � � �� The coordinates of the point � � �
� � � � � � � � � .Conclude that $ � � � � is the Men’s Earning Power in � � � � For anotherexample, suppose we wanted to know when men’s earning power willequal $ � � � � � ? This means we seek a data point � on the men’s earningcurve whose � -coordinate is � ��� � � � By (4.6), � has the form
� �� � � �
� � � � � � � � � � � � � � � � �
We want this to be a data point of the form� �� � � � � � � . Setting these two
points equal and equating the second coordinates leads to an algebraproblem:
� � � � � � � � � � � � � � � � � � � � � � �
� � � � � � �This means men’s earning power will be $33,000 at the end of the firstquarter of 1991. Graphically, we interpret this reasoning as follows:
� Draw a horizontal line ��� � � � � � and label the intersection point �on the model.
� Draw a vertical line � through � . The line � crosses the axis at thepoint 1991.24.
� The coordinates of the point ��� � � � � � � ��� � � � � � .
In the exercises, you will be asked to show that the women’s earningpower model is given by the equation
� � � � � � � � � � � � � � � �� � �
Using the two linear models for the earning power of men and women,are women gaining on men? You will also be asked to think about thisquestion in the exercises.

50 CHAPTER 4. LINEAR MODELING
4.7 What’s Needed to Build a Linear Model?
As we progress through this text, a number of different “types” of mathe-matical models will be discussed. We will want to think about the infor-mation needed to construct that particular kind of mathematical model.Why would we care? For example, in a laboratory context, if we knew asituation being studied was given by a linear model, this would effect theamount of data collected. In the case of linear models, we can now makethis useful statement:
Important Fact 4.7.1. A linear model is completely determined by:
1. One data point and a slope (a rate of change), or
2. Two data points, or
3. An intercept and a slope (a rate of change).
4.8 Linear Application Problems
Example 4.8.1. The yearly resident tuition at the University of Washing-ton was $ � � � in � � � and $ � � � � in � � � � Assume that the tuition growth atthe UW follows a linear model. What will be the tuition in the year 2000?When will yearly tuition at the University of Washington be $10,000?
1990
2000
2010
2020
2030
2040
2000
4000
6000
8000
10000
PSfrag replacements
� -axis
� -axis-axis(dollars)
(year)
� �
Figure 4.10: Linear tuitionmodel.
Solution. If we consider a coordinate system where the -axis represents the year and the � -axis representsdollars, we are given two data points: � � �
� � � � � � � � �and � � �
� � � � � � � � � � . Using the two-point formula for theequation of line through � and � , we obtain the equation
� � � � � � � � � � � � � � � �The graph of this equation gives a line through the given
points as pictured in Figure 4.10.If we let �� ��� � � , we get ��� $ � � � � , which tells us the tuition in the
year ��� � � . On the other hand, if we set the equation equal to $ � ��� � � , wecan solve for :
� ��� � � � � � � � � � � � � � � � �� � � � � � � � � � � �
� � � � � � � �Conclude the tuition is $ � ��� � � in the year ��� � �

4.9. PERPENDICULAR AND PARALLEL LINES 51
4.9 Perpendicular and Parallel Lines
Here is a useful fact to keep in mind.
Important Facts 4.9.1. Two non-vertical lines in the plane are parallelprecisely when they both have the same slope. Two non-vertical lines areperpendicular precisely when their slopes are negative reciprocals of oneanother.
PSfrag replacements
� -axis
� -axis
-axis
given line
�
� �
Figure 4.11: Graph of per-pendicular line.
Example 4.9.2. Let � be a line in the plane passing throughthe points
� � � and
� � � � � . Find a linear equation whosegraph is a line parallel to � passing through 5 on the � -axis.Find a linear equation whose graph is perpendicular to �and passes through
� � � � � .Solution. Letting ��� �
� � and � � � � � � � , apply the “twopoint formula”:
� � � �� � � � �
� � � � � �� �The graph of this equation will be � . This equation is in slope interceptform and we can read off that the slope is � � �
� . The desired line�
isparallel to � ; it must have slope � � �
� and � -intercept 5. Plugging intothe “slope intercept form”:
� � � �� � ��
The desired line � is a line perpendicular to � (so its slope is �� � � �� �
�=� ) and passes through the point
� � � � � , so we can use the “point slopeformula”:
� ���� �
�� � � �
4.10 Intersecting Curves II
We have already encountered problems that require us to investigate theintersection of two curves in the plane. Ultimately, this reduces to solvinga system of two (or more) equations in the variables and � . A usefultool when working with equations involving squared terms (i.e., � or �
�),
is the quadratic formula.

52 CHAPTER 4. LINEAR MODELING
Important Fact 4.10.1. Quadratic Formula: Consider the equation��� �� �
���� � � , where
� � � ��� are constants. The solutions for this equa-tion are given by the formula
� � � � ������ �
�� � �
The solutions are real numbers if and only if ���� �
�� � .
The next example illustrates a typical application of the quadratic for-mula. In addition, we describe a very useful technique for finding theshortest distance between a “line” and a “point.”
PSfrag replacements
-axis
-axis
-axis
flight path
North
irrigated field
East
� mile
s
cropduster��� � miles
�
South
West
Figure 4.12: The flight pathof a crop duster.
Example 4.10.2. A crop dusting airplane flying a constantspeed of ��� mph is spotted � miles South and �
�miles
East of the center of a circular irrigated field. The irrigatedfield has a radius of mile. Impose a coordinate system aspictured, with the center of the field the origin
� � � � � .. Theflight path of the duster is a straight line passing over thelabeled points � and � . Assume that the point � where theplane exits the airspace above the field is the Western-mostlocation of the field. Answer these questions:
1. Find a linear equation whose graph is the line alongwhich the crop duster travels.
2. Find the location � where the crop duster enters airspace above theirrigated field.
3. How much time does the duster spend flying over the irrigated field?
4. Find the shortest distance from the flight path to the center of theirrigated field.
Solution.
1. Take � � � � � � � and � � ��
� � � � � � duster spotting point. Constructa line through � and � . The slope is � � � � � � and the line equationbecomes:
� � � � � � � � � � � (4.8)
2. The equation of the boundary of the irrigated region is � � � � � .We need to solve this equation AND the line equation � � � � � � � � � �

4.10. INTERSECTING CURVES II 53
simultaneously. Plugging the line equation into the unit circle equa-tion gives:
� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
� � � � � � � � � � �� � � �Apply the quadratic formula and find � � � � � � � � . Concludethat the coordinate of � is � � � � � . To find the � coordinate, pluginto the line equation and get � � � � � � � � � . Conclude that � �� � � � � � � � � � � � � � �
3. Find the distance from � to � by using the distance formula:
� � � � �� � � � � � � � � � �� � � � � � � � � � � �� �
� � � miles
Now, � � � � miles
�� � mph � � ��� ��� � hours �
� �seconds.
4. The idea is to construct a line perpendicular to the flight path pass-ing through the origin of the coordinate system. This line will haveslope � � � �� � � � � � � � . So this perpendicular line has equation� � � � � . Intersecting this line with the flight path gives us thepoint closest to the center of the field. The -coordinate of this pointis found by setting the two line equations equal and solving:
� � � � � � � � � � � � � � � �� � � �
This means that the closest point on the flight path is� � � �� � � � � � � � � .
Apply the distance formula and the shortest distance to the flightpath is
� � � � � �� � � � � � � � �� � � �
� � � � ��� �

54 CHAPTER 4. LINEAR MODELING
4.11 ExercisesProblem 4.1. This exercise emphasizes the“mechanical aspects” of working with linearequations. Find the equation of a line:
(a) Passing through the points � ����� ��� and� � � � � � .
(b) Passing through the point � � ��� � ��� withslope � � ��� .
(c) With � -intercept � � � and slope � �� � .
(d) Passing through the point � � � ����� andhaving slope � � � .
(e) Perpendicular to the line in (a) and pass-ing through � ��� ��� .
(f) Parallel to the line in (b) and having � -intercept � � ��� .
(g) Having the equation � � � � ��� .(h) Crossing the � -axis at ��� � and having
slope � � � .
Problem 4.2. A spherical balloon of radius 30feet is to be anchored to the ground by twolines as pictured below:
safety line
USBA Safety regulation #TD−83−7856a
100 feetsafety line
PSfrag replacements
-axis-axis
-axis
The U.S. Balloon Association safety regula-tions require that the safety lines have a slopeof absolute value $
� and be anchored symmet-rically with respect to the basket location onthe ground. Find the length of each safety lineand where it must be anchored to the ground.
Problem 4.3. Sketch an accurate picture ofthe line having equation � � � � � � . Let � be anunknown constant.
(a) Find the point of intersection betweenthe line you have graphed and the line� � � � � � ; your answer will be a point inthe ��� plane whose coordinates involvethe unknown � .
(b) Find � so that the intersection point in(a) has � -coordinate 10.
(c) Find � so that the intersection point in(a) lies on the � -axis.
Problem 4.4. (a) What is the area of the tri-angle determined by the lines � � � �� � � , � � ! � and the � -axis?
(b) If % � and ��� � , then the line � �� � � cuts off a triangle from the firstquadrant. Express the area of that tri-angle in terms of � and .
(c) The lines � � � � � , � � � and the � -axis form a triangle in the first quadrant.Suppose this triangle has an area of ���square units. Find � .
Problem 4.5. Complete Table 4.2 on page 55.In many cases there may be several possiblecorrect answers.
Problem 4.6. The (average) sale price forsingle family property in Seattle and PortTownsend is tabulated below:
YEAR SEATTLE PORT TOWNSEND1970 $38,000 $84001990 $175,000 $168,400
(a) Find a linear model relating the year �and the sales price � for a single familyproperty in Seattle.
(b) Find a linear model relating the year �and the sales price � for a single familyproperty in Port Townsend.
(c) Sketch the graph of both modeling equa-tions in a common coordinate system;restrict your attention to ��� ��� � .
(d) What is the sales price in Seattle andPort Townsend in 1983 and 1998?
(e) When will the average sales price inSeattle and Port Townsend agree andwhat is this price?

4.11. EXERCISES 55
Equation Slope � -intercept Point onthe line
Point onthe line
���������
�� �������� ��� �����
� �
������� �
� �����
�
�� ��� �� �� ���� � �
� �����"!#�
Table 4.2: Linear equations table for Problem 4.5.
(f) When will the average sales price inPort Townsend be $15,000 less than theSeattle sales price? What are the twosales prices at this time?
(g) When will the Port Townsend sales pricebe $15,000 more than the Seattle salesprice? What are the two sales prices atthis time?
(h) When will the Seattle sales price be dou-ble the Port Townsend sales price?
(i) Is the Port Townsend sales price everdouble the Seattle sales price?
Problem 4.7. Consider the equation: � � � ��� � � � � � � . Find the values of � that makethis equation true (your answer will involve � ).Find values of � that make this equation true(your answer will involve � ).
Problem 4.8. The cup on the ��%$
hole of a golfcourse is located dead center in the middle of acircular green that is
� feet in diameter. Yourball is located as in the picture below:
40 feet
50 feet
cup
green
ball
rough
9
ball path
PSfrag replacements
-axis-axis
-axis
The ball follows a straight line path and exitsthe green at the right-most edge. Assume theball travels a constant rate of ��� ft/sec.
(a) Where does the ball enter the green?
(b) When does the ball enter the green?
(c) How long does the ball spend inside thegreen?
(d) Where is the ball located when it isclosest to the cup and when does thisoccur.

56 CHAPTER 4. LINEAR MODELING
Problem 4.9. A car traveling on a freeway con-sumes gas at a constant rate. When the carhas gone 100 miles there are 10 gallons of gasin the tank, and when it has gone 220 milesthere are 6 gallons left.
(a) Find a formula that expresses theamount � of gas in the tank when thecar has gone � miles.
(b) How much gas was in the tank when thecar started on the trip?
(c) How far has the car gone when it runsout of gas?
Problem 4.10. Allyson and Adrienne have de-cided to connect their ankles with a bungeecord; one end is tied to each person’s ankle.The cord is 30 feet long, but can stretch upto 90 feet. They both start from the samelocation. Allyson moves 10 ft/sec and Adri-enne moves 8 ft/sec in the directions indi-cated. Adrienne stops moving at time � � sec, but Allyson keeps on moving 10 ft/sec inthe indicated direction.
(a) Sketch an accurate picture of the situa-tion at time � �
seconds. Make sure tolabel the locations of Allyson and Adri-enne; also, compute the length of thebungee cord at � � seconds.
(b) Where is Allyson when the bungeereaches its maximum length?
Building
20 ft
30 ft
adri−N
allyson
start
PSfrag replacements
-axis-axis
-axis
Problem 4.11. Although we know that twodistinct points determine a line in the plane,
three distinct points need not lie on a line.Never the less, we can try to find a ”best fitline” to three given data points. This problemillustrates the idea. Begin by carefully plottingthese three points in an � � -coordinate system:� ��� ��� , � � � � � , � ����� � � .
(a) Plot the line � � with equation � � �$ �
$�� in the coordinate system containing
your three points. Which of the threepoints lie on this line?
(b) The line in (a) is called the ”best fit line”for the given three data points. In orderto measure the ”goodness” of the fit, wecan compute a number called the leastsquares error. This is the sum:
� � � �� � � � � � �
���! � � ���
� � ���! � �
Compute this number and explain inwords and in terms of your picture whatthe number represents.
(c) Plot the line � � with equation � � � alongwith the three points. Using the mea-surement in (b), is the line � � a better fitto the three plotted points?
Problem 4.12. Dave is going to leaveacademia and go into business building grainsilos. A grain silo is a cylinder with a hemi-spherical top, used to store grain for farm ani-mals. Here is a 3D view and a cross-section:
silo h
r
3D- view cross-section
PSfrag replacements
-axis-axis
-axis
If Dave is standing next to a silo of cross-sectional radius � � �
feet at the indicated po-sition, his vision will be partially obstructed.Find the portion of the � -axis that Dave cansee. (Hint: Let � be the � -coordinate of thepoint where line of sight #1 is tangent to thesilo; compute the slope of the line using twopoints (the tangent point and (12,0)). On theother hand, compute the slope of line of sight#1 by noting it is perpendicular to a radial linethrough the tangency point. Set these two cal-culations of the slope equal and solve for � .)

4.11. EXERCISES 57
line of sight #2
TOP VIEW
blindspot
(12,0)
dave
line of sight #1
PSfrag replacements
� -axis
� -axis
-axis
Problem 4.13. While speaking on the phoneto a friend in Oslo, Norway, you learned thatthe current temperature there was � ��� � Cel-sius ( � ��� � C). After the phone conversation,you wanted to convert this temperature toFahrenheit degrees � F, but you could not finda reference with the correct formulas. Youthen remembered that the relationship be-tween � F and � C is linear.
(a) Using this and the knowledge that��� � F � � � C and � ��� � F � ����� � C, find anequation that computes Celsius temper-ature in terms of Fahrenheit tempera-ture; i.e., an equation of the form � =“an expression involving only the vari-able � .”
(b) Likewise, find an equation that com-putes Fahrenheit temperature in termsof Celsius temperature; i.e. an equationof the form � = “an expression involvingonly the variable � .”
(c) How cold was it in Oslo in � F?
Problem 4.14. Pam is taking a train from thetown of Rome to the town of Florence. Rome islocated 30 miles due West of the town of Paris.Florence is 25 miles East, and 45 miles Northof Rome.On her trip, how close does Pam get to Paris?
Problem 4.15. Angela, Mary and Tiff are allstanding near the intersection of Universityand 42 ��� streets. Mary and Tiff do not move,but Angela runs toward Tiff at ��� ft/sec alonga straight line, as pictured. Assume the roadsare �� feet wide and Tiff is !�� feet north of thenearest corner. Where is Angela located whenshe is closest to Mary and when does she reachthis spot?
mary
angela
tiff
42 nd St.
University Way
PSfrag replacements
-axis-axis
-axis
Problem 4.16. (a) Using the first and lastdata points in Table 4.1, Page 39, showthat the women’s earning power linearmodel has equation
� � �����&��� � � � ��� ��� � �!&��!&
Sketch the graph modeling the yearsbetween ��� � and �"������ What is women’searning power in ����� ? When willwomen’s earning power be $ � ��� ����� ?
(b) Recall the linear models for men andwomen’s earning power in Figure 4.2.The “women’s percentage of men’s earn-ings” is given by the formula
��� women�s salary
men�s salary
� ������
What is this percentage in ������! ? Whenis � � ! � %? Is the percentage ever��� � ! %? What is happening to � as welook farther and farther into the future?
(c) Plot the graphs of the men’s andwomen’s earning power equations in thesame coordinate system. Use this graphto explain whether or not women’s earn-ing power is improving with respect tomen’s earning power. What aspect ofeach equation controls whether womenare gaining on men?
Problem 4.17. Return to Example 4.10.2 onpage 52. When is the duster closest to the cen-ter of the field?

58 CHAPTER 4. LINEAR MODELING
Problem 4.18. Draw the graphs of � � � � and� � � in the � � coordinate system. An antstarts at the location � !&� � � and moves to the leftalong the line ��� � . Assume the position of theant after � seconds is the point � � ��� � � ! � ���� � � .At the same instant, a spider starts at the loca-tion � � ����� ��� and moves upward along the line� � � � . Assume the position of the spider after� seconds is the point � � ��� �� � ����� � � ��� . InProblem 3.8 on page 37, we found the distancebetween the ant and spider at time � was givenby the formula: � � ��� � �
� � � ��� �
� Whenis the distance between the two bugs exactly� units? Where are the bugs located at thesetimes?
Problem 4.19. The infamous crawling tractorsprinkler is located as pictured below, 100 feetSouth of a 10 ft. wide sidewalk; notice the hoseand sidewalk are not perpendicular. Once thewater is turned on, the sprinkler waters a cir-cular disc of radius 20 feet and moves Northalong the hose at the rate of �� inch/second.
(a) Impose a coordinate system. Describethe initial coordinates of the sprinklerand find the equation of the line formingthe southern boundary of the sidewalk.
(b) After 33 minutes, sketch a picture ofthe wet portion of the sidewalk; find thelength of the wet portion of the Southernedge of the sidewalk.
(c) Find the equation of the line formingthe northern boundary of the sidewalk.(Hint: You can use the properties of righttriangles.)
hose
100 ft
20 ft
circular watered zone
100 ft.
S
W E
N
sidewalkPSfrag replacements
-axis-axis
-axis
Problem 4.20. (a) Solve for � :
�� �
�� � � � �
(b) Solve for � : � � � � ������� � ��� � � ���� � .(c) Solve for � : $� � ��� � � ����� � ��� � � ���� � .(d) Solve for � : � � � � ������� � ��� � � ���� � .
Problem 4.21. (a) Solve for � : � � � ! � .
(b) Solve for � : � � � ! � � �
(c) Solve for � : � � � ! � � �
(d) Assume�
is constant and solve for � :�� � � � � � � � � � ��
(e) Assume � is constant and solve for�:
�� � � � � � � � � � ��
Problem 4.22. (a) Solve for � :
� � ��� � � � � � �
(b) Solve for � :
� � � � � � �

Chapter 5
Functions and Graphs
Pictures are certainly important in the work of an architect, but it isperhaps less evident that visual aids can be powerful tools for solvingmathematical problems. If we start with an equation and attach a pic-ture, then the mathematics can come to life. This adds a new dimensionto both interpreting and solving problems. One of the real triumphs ofmodern mathematics is a theory connecting pictures and equations viathe concept of a graph. This transition from “equation” to “picture” (calledgraphing) and its usefulness (called graphical analysis) are the theme ofthe next two sections. The importance of these ideas is HUGE and can-not be overstated. Every moment spent studying these ideas will payback dividends in this course and in any future mathematics, science orengineering courses.
5.1 Relating Data, Plots and Equations
����
PSfrag replacements
-axis
-axis
-axis
gull line of motion
cliff level
ocean
Figure 5.1: Seagull’s height.
Imagine you are standing high atop an oceanside cliff andspot a seagull hovering in the air-current. Assuming thegull moves up and down along a vertical line of motion,how can we best describe its location at time � seconds?
There are three different (but closely linked) ways todescribe the location of the gull:
� a table of data of the gull’s height above cliff level atvarious times � ;
� a plot of the data in a “time” (seconds) vs. “height”(feet) coordinate system;
� an equation relating time � (seconds) and height (feet).
To make sure we really understand how to pass back and forth be-tween these three descriptive modes, imagine we have tabulated (Fig-ure 5.2) the height of the gull above cliff level at one-second time intervals
59

60 CHAPTER 5. FUNCTIONS AND GRAPHS
for a 10 second time period. Here, a “negative height” means the gull isbelow cliff level. We can try to visualize the meaning of this data by plot-ting these 11 data points
� ��� �� in a time (sec.) vs. height (ft.) coordinatesystem.
Gull Height (feet above cliff level)� (sec) � (ft) � (sec) � (ft) � (sec) � (ft)
0 20 4 -10 8 201 6.88 5 -8.12 9 36.882 -2.5 6 -2.5 10 57.53 -8.12 7 6.88
(a) Symbolic data.
PSfrag replacements
-axis
-axis
-axis
Seconds
Feet
� � �� � � �� �� �� � �
� � � �
(b) Visual data.
Figure 5.2: Symbolic versus visual view of data.
We can improve the quality of this description by increasing the num-ber of data points. For example, if we tabulate the height of the gull abovecliff level at 1/2 second or 1/4 second time intervals (over the same 10second time period), we might get these two plots:
PSfrag replacements
-axis
-axis
-axis
Feet
Seconds� � � � �� �� �� �� � �
� �� �
(a) �� second intervals.
PSfrag replacements
-axis
-axis
-axis
Feet
Seconds� � �� �
� �
� �� �� � �� �
� �
(b) ��
second intervals.
Figure 5.3: Shorter time intervals mean more data points.
We have focused on how to go from data to a plot, but the reverse pro-cess is just as easy: A point
� ��� �� in any of these three plots is interpretedto mean that the gull is feet above cliff level at time � seconds.
Furthermore, increasing the amount of data, we see how the plottedpoints are “filling in” a portion of a parabola. Of course, it is way tootedious to create longer and longer tables of data. What we really wantis a “formula” (think of it as a prescription) that tells us how to producea data point for the gull’s height at any given time � . If we had such aformula, then we could completely dispense with the tables of data andjust use the formula to crank out data points. For example, look at this

5.2. WHAT IS A FUNCTION? 61
equation involving the variables � and :
� ��� � �
�� � � � �
If we plug in � � � � � � � � � � , then we get � ��� , � � � � , � � � � , � � � � , � � � � , re-spectively; this was some of our initial tabulated data. This same equa-tion produces ALL of the data points for the other two plots, using � �second and � � second time intervals. (Granted, we have swept under therug the issue of “...where the heck the equation comes from...” ; that isa consequence of mathematically modeling the motion of this gull. Rightnow, we are focusing on how the equation relates to the data and theplot, assuming the equation is in front of us to start with.) In addition, itis very important to notice that having this equation produces an infinitenumber of data points for our gull’s location, since we can plug in any� value between 0 and 10 and get out a corresponding height . In otherwords, the equation is A LOT more powerful than a finite (usually calleddiscrete) collection of tabulated data.
5.2 What is a Function?
Our lives are chock full of examples where two changing quantities arerelated to one another:
� The cost of postage is related to the weight of the item.
� The value of an investment will depend upon the time elapsed.
� The population of cells in a growth medium will be related to theamount of time elapsed.
� The speed of a chemical reaction will be related to the temperatureof the reaction vessel.
In all such cases, it would be beneficial to have a “procedure” wherebywe can assign a unique output value to any acceptable input value. Forexample, given the time elapsed (an input value), we would like to predicta unique future value of an investment (the output value). Informally,this leads to the broadest (and hence most applicable) definition of whatwe will call a function:
Definition 5.2.1. A function is a procedure for assigning a unique outputto any allowable input.

62 CHAPTER 5. FUNCTIONS AND GRAPHS
PSfrag replacements
-axis
-axis
-axis
��� � � � � �
x
y
y-axis
x-axis
Figure 5.4: Graph of aprocedure.
The key word here is “procedure.” Our discussion of thehovering seagull in 5.1 highlights three ways to producesuch a “procedure” using data, plots of curves and equa-tions.
� A table of data, by its very nature, will relate twocolumns of data: The output and input values are
listed as column entries of the table and reading across each rowis the “procedure” which relates an input with a unique output.
� Given a curve in Figure 5.4, consider the “procedure” which as-sociates to each on the horizontal axis the � coordinate of thepictured point � on the curve.
� Given an equation relating two quantities and � , plugging in a par-ticular value and going through the “procedure” of algebra oftenproduces a unique output value � .
5.2.1 The definition of a function(equation viewpoint)
Now we focus on giving a precise definition of a function, in the situa-tion when the “procedure” relating two quantities is actually given by anequation. Keep in mind, this is only one of three possible ways to de-scribe a function; we could alternatively use tables of data or the plot ofa curve. We focus on the equation viewpoint first, since it is no doubt themost familiar.
If we think of and � as related physical quantities (e.g. time and dis-tance), then it is sometimes possible (and often desirable) to express oneof the variables in terms of the other. For example, by simple arithmetic,the equations
� � � � � � � �
� � ��
� � � � �can be rewritten as equivalent equations
� � �� � � � � � � � � � � � � � � � �
�
This leads to THE MOST IMPORTANT MATH DEFINITION IN THE WORLD:
Definition 5.2.2. A function is a package, consisting of three parts:
� An equation of the form
� � “a mathematical expression only involving the variable ,”

5.2. WHAT IS A FUNCTION? 63
which we usually indicate via the shorthand notation � � � � � � Thisequation has the very special property that each time we plug inan value, it produces exactly one (a unique) � value. We call themathematical expression
� � � ”the rule”.
� A set � of -values we are allowed to plug into� � � , called the
”domain” of the function.
� The set�
of output values� � � , where varies over the domain,
called the ”range” of the function.
Any time we have a function � � � � � , we refer to as the independentvariable (the “input data”) and � as the dependent variable (the “outputdata”). This terminology emphasizes the fact that we have freedom inthe values of we plug in, but once we specify an value, the � value isuniquely determined by the rule
� � � .PSfrag replacements
-axis
-axis
-axis
Graph of � ����
y-axis
x-axis
Figure 5.5: Constant func-tion.
Examples 5.2.3. (i) The equation � � � � � is in theform � � � � � , where the rule is
� � � � � � � . Once wespecify a domain of values, we have a function. Forexample, we could let the domain be all real numbers.
(ii) Take the same rule� � ��� � � � from (i) and let the
domain be all non-negative real numbers. This de-scribes a function. However, the functions
� � � � � � � on the domain of all non-negative real numbers and� � � � � � �
on the domain of all real numbers (from (i)) are different, even thoughthey share the same rule; this is because their domains differ! Thisexample illustrates the idea of what is called a restricted domain. Inother words, we started with the function in (i) on the domain of allreal numbers, then we “restricted” to the subset of non-negative realnumbers.
(iii) The equation � � � , where � is a constant, defines a function on thedomain of all real numbers, where the rule is
� � � � � ; we call thesethe constant functions. Recall, in Chapter 3, we observed that thesolutions of the equation � � � , plotted in the � coordinate system,will give a horizontal line. For example, if � � � , you get the horizontalaxis.
(iv) Consider the equation � � ��, then the rule
� � � � ��
defines a function,as long as we do not plug in � � . For example, take the domain tobe the non-zero real numbers.
(v) Consider the equation � � ��� � . Before we start plugging in
values, we want to know the expression under the radical symbol(square root symbol) is non-negative; this insures the square root is

64 CHAPTER 5. FUNCTIONS AND GRAPHS
a real number. This amounts to solving an inequality equation: � � � ; i.e., � � These remarks show that the rule
� � � � � � �
defines a function, where the domain of values is � .
Typically, the domain of a function � � � � � will either be the entirenumber line, an interval on the number line, or a finite union of suchintervals. We summarize the notation used to represent intervals in Ta-ble 5.1.
Common Intervals on the Number Line
Description SymbolicNotation
Picture
All numbers � between �and � , � possibly equal toeither � or �
�� � � �
PSfrag replacements
-axis
-axis
-axis
��
All numbers � between �and � , ���� � and ������ ��� � � �
PSfrag replacements
-axis
-axis
-axis
��
All numbers � between �and � , ���� � and � possi-bly equal to �
�� � � �
PSfrag replacements
-axis
-axis
-axis
��
All numbers � between �and � , ���� � and � possi-bly equal to �
��� � � �
PSfrag replacements
-axis
-axis
-axis
��
Table 5.1: Interval Notations
We can interpret a function as a “prescription” that takes a given value (in the domain) and produces a single unique � value (in therange). We need to be really careful and not fall into the trap of thinkingthat every equation in the world is a function. For example, if we look atthis equation
��� � �
and plug in ��� , the equation becomes
�� � �
This equation has two solutions, � � � , so the conclusion is that plug-ging in � � does NOT produce a single output value. This violates oneof the conditions of our function definition, so the equation � � � � isNOT a function in the independent variable . Notice, if you were to try

5.2. WHAT IS A FUNCTION? 65
and solve this equation for � in terms of , you’d first write �� � ��
and then take a square root (to isolate � ); but the square root introducesTWO roots, which is just another way of reflecting the fact there can betwo � values attached to a single value. Alternatively, you can solve theequation for in terms of � , getting �� � �
�; this shows the equation
does define a function ����� � in the independent variable � .
5.2.2 The definition of a function(conceptual viewpoint)
Conceptually, you can think of a function as a “process”: An allowableinput goes into a “black box” and out pops a unique new value denotedby the symbol
� � � . Compare this with the machine making “hula-hoops”in Figure 5.6. While you are problem solving, you will find this to be auseful viewpoint when a function is described in words.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PSfrag replacements
-axis
-axis
-axis
hoopout
� � �� � � �
in
tubes
tube
(a) A hoop machine as a“process” taking “tubes”
to “hoops.”
PSfrag replacements
-axis
-axis
-axis
�out
� �� �
in�
domain
(b) A function as a“process” which takes
� to � .
Figure 5.6: Viewing a function as a “process.”
Examples 5.2.4. Here are four examples of relationships that are func-tions:
(i) The total amount of water used by a household since midnighton a particular day. Let � be the total number of gallons of waterused by a household between 12:00am and a particular time � ; wewill use time units of “hours.” Given a time � , the household willhave used a specific (unique) amount of water, call it �
� ��� . Then � ��� ��� defines a function in the independent variable � with dependent
variable � . The domain would be � � ��
and the largest possiblevalue of �
� ��� on this domain is �� ��� . This tells us that the range would
be the set of values � � �� ��� .
(ii) The height of the center of a basketball as you dribble, de-pending on time. Let be the height of the basketball center at time� seconds after you start dribbling. Given a time � , if we freeze the ac-tion, the center of the ball has a single unique height above the floor,

66 CHAPTER 5. FUNCTIONS AND GRAPHS
call it� � ��� . So, the height of the basketball center is given by a func-
tion � � � ��� . The domain would be a given interval of time you aredribbling the ball; for example, maybe � � � (the first 2 seconds).In this case, the range would be all of the possible heights attainedby the center of the basketball during this 2 seconds.
(iii) The state sales tax due on a taxable item. Let � be the statetax (in dollars) due on a taxable item that sells for
�dollars. Given a
taxable item that costs�
dollars, the state tax due is a single uniqueamount, call it �
� � � . So, � ��� � � � is a function, where the indepen-dent variable is
�. The domain could be taken to be � � ��� � � � � � � ,
which would cover all items costing up to one-million dollars. Therange of the function would be the set of all values �
� � � , as�
rangesover the domain.
(iv) The speed of a chemical reaction depending on the temper-ature. Let � be the speed of a particular chemical reaction and �the temperature in Celsius
�C. Given a particular temperature � , one
could experimentally measure the speed of the reaction; there will bea unique speed, call it � � � � . So, � ��� � � � is a function, where the inde-pendent variable is � . The domain could be taken to be �� � � � ,which would cover the range of temperatures between the freezingand boiling points of water. The range of the function would be theset of all speeds � � � � , as � ranges over the domain.
5.3 The Graph of a FunctionLet’s start with a concrete example; the function
� � � � � � � on thedomain of all real numbers. We discussed this Example 5.2.3. Plug inthe specific values, where � � , � , , � and tabulate the resulting� values of the function:
� � point�� � � �
-1 5 (-1,5)0 3 (0,3)1 1 (1,1)2 -1 (2,-1)...
......
� ����� � �
� � ����� � �
(a) Tabulated data.
PSfrag replacements
-axis
-axis
-axis
Graph of � � � ��� � .� -axis
� -axis
(b) Visual data.
Figure 5.7: Symbolic versus visual view of data.
This tells us that the points� � � � , � � � , � � � � � , � � � � � are solutions
of the equation � � � � � . For example, if � � � � � , � � , � � ,

5.3. THE GRAPH OF A FUNCTION 67
then � � � � � (which is true), or if � � � � � , � � , � � � , then� � � � � � (which is true), etc. In general, if we plug in we get out� � � , so the point
� � � � � � is a solution to the function equation��� � � � . We can plot all of these solutions in the � -coordinate system.The set of points we obtain, as we vary over all in the domain, is calledthe set of solutions of the equation � � � � � :
Solutions � � � �� � � � � � any real number� �
Notice that plotting these points produces a line of slope � � � � with� -intercept 3. In other words, the graph of the function
� � � � � � � isthe same as the graph of the equation � � � � � , as we discussed inChapter 4.
In general, by definition, we say that a point� �� � � is a solution to the
function equation � � � � � if plugging and � into the equation gives atrue statement.
How can we find ALL the solutions of the equation � � � � � ? In general,the definition of a function is “rigged” so it is easy to describe all solutionsof the equation � � � � � : Each time we specify an value (in the domain),there is only one � value, namely
� � � . This means the point ��� � �� � � � �is the ONLY solution to the equation � � � � � with first coordinate . Wedefine the graph of the function � � � � � to be the plot of all solutions ofthis equation (in the � coordinate system). It is common to refer to thisas either the “graph of � ��� � ” or the “graph of � .”
Graph � � � � � � � � � in the domain � (5.1)
Important Procedure 5.3.1. Points on a graph. The description of thegraph of a function gives us a procedure to produce points on the graphAND to test whether a given point is on the graph. On the one hand, ifyou are given � in the domain of a function � � � � � , then you immediatelycan plot the point
� � � � � � � � on the graph. On the other hand, if someonegives you a point
� � � � � , it will be on the graph only if � � � � � � is true. Weillustrate this in Example 5.3.2.
PSfrag replacements
-axis
-axis
-axis
-axis
� -axis� � �� �� �� �� � �
� �� �
� �
� �Figure 5.8: � � � � ��� .
Example 5.3.2. The function � � � ��� � � � � � � � � � � � de-fines a function in the independent variable � . If we restrictto the domain � � � , then the discussion in Chapter 7tells us that the graph is a portion of a parabola: See Fig-ure 5.8. Using the above procedure, you can verify that thedata points discussed in the seagull example (in � 5.1) alllie on this parabola. On the other hand, the point
� � � � � isNOT on the graph, since
� � � � ����� �� � .

68 CHAPTER 5. FUNCTIONS AND GRAPHS
5.4 The Vertical Line Test
There is a pictorial aspect of the graph of a function that is very revealing:Since
� �� � � � � is the only point on the graph with first coordinate equal to , a vertical line passing through on the -axis (with in the domain)crosses the graph of � � � � � once and only once. This gives us a decisiveway to test if a curve is the graph of a function.
Important Procedure 5.4.1. The vertical line test. Draw a curve inthe � -plane and specify a set � of -values. Suppose every vertical linethrough a value in � intersects the curve exactly once. Then the curve isthe graph of some function on the domain � . If we can find a single verticalline through some value in � that intersects the curve more than once, thenthe curve is not the graph of a function on the domain � .
For example, draw any straight line � in the plane. By the verticalline test, if the line � is not vertical, � is the graph of a function. On theother hand, if the line � is vertical, then � is not the graph of a function.These two situations are illustrated in Figure 5.9. As another example,consider the equation � � � � � � whose graph is the unit circle andspecify the domain � to be � ; recall Example 3.2.2. The verticalline passing through the point � �� � � � will intersect the unit circle twice;by the vertical line test, the unit circle is not the graph of a function onthe domain � .
crosses curve twice
PSfrag replacements
-axis
-axis
-axis
� -axis� -axis� -axis
� �
� -axis� -axis� -axiscrosses curve twice
�
�
�
Figure 5.9: Applying the vertical line test.
5.4.1 Imposed Constraints
In physical problems, it might be natural to constrain (meaning to “limit”or “restrict”) the domain. As an example, suppose the height (in feet) ofa ball above the ground after � seconds is given by the function
� � � ��� � � ��� � � � �

5.5. LINEAR FUNCTIONS 69PSfrag replacements
-axis
-axis
-axis
� -axis
-axis
Physically interestingportion of graph.
Figure 5.10: Restricting thedomain.
We could look at the graph of the function in the �� -plane and we will review in Chapter 7 that the graphlooks like a parabola. The physical context of this prob-lem makes it natural to only consider the portion of thegraph in the first quadrant; why? One way of specifyingthis quadrant would be to restrict the domain of possible� values to lie between 0 and �� ; notationally, we wouldwrite this constraint as � � �� .
5.5 Linear Functions
A major goal of this course is to discuss several different kinds of func-tions. The work we did in Chapter 4 actually sets us up to describe onevery useful type of function called a linear function. Back in Chapter 4,we discussed how lines in the plane can be described using equations inthe variables and � . One of the key conclusions was:
Important Fact 5.5.1. A non-vertical line in the plane will be the graphof an equation � � � ��� , where � is the slope of the line and � is the� -intercept.
Notice that any non-vertical line will satisfy the conditions of the ver-tical line test, which means it must be the graph of a function. What isthe function? The answer is to use the equation in and � we already ob-tained in Chapter 4: The rule
� � � � � � � on some specified domain willhave a line of slope � and � -intercept � as its graph. We call a functionof this form a linear function.
Example 5.5.2. You are driving 65 mph from the Kansas state line (milemarker 0) to Salina (mile marker 130) along I-35. Describe a linear functionthat calculates mile marker after � hours. Describe another linear functionthat will calculate your distance from Salina after � hours.
PSfrag replacements
-axis
-axis
-axis
� -axis
�� �� � �� �� �� �� �
� � � � � � -axis
Figure 5.11: Distance func-tions.
Solution. Define a function �� ��� to be the mile marker after
� hours. Using “distance=rate � time,” we conclude that� � � will be the distance traveled after � hours. Since westarted at mile marker 0, �
� ��� � � � � is the rule for the firstfunction. A reasonable domain would be to take � � � ,since it takes 2 hours to reach Salina.
For the second situation, we need to describe a dif-ferent function, call it � ��� , that calculates your distancefrom Salina after � hours. To describe the rule of � ��� we

70 CHAPTER 5. FUNCTIONS AND GRAPHS
can use the previous work:
� ��� � �mile marker Salina ����your mile marker at � hrs. �
� ��� � �� ���
� ��� � � � � �For the rule � ��� , the best domain would again be � � � . We
have graphed these two functions in the same coordinate system: SeeFigure 5.11 (Which function goes with which graph?).
5.6 Profit Analysis
Let’s give a first example of how to interpret the graph of a function inthe context of an application.
Example 5.6.1. A software company plans to bring a new product to mar-ket. The sales price per unit is $15 and the expense to produce and market units is $ � � � � � �� . What is the profit potential?
Two functions control the profit potential of the new software. Thefirst tells us the gross income, in dollars, on the sale of units. All ofthe costs involved in developing, supporting, distributing and marketing units are controlled by the expense equation (again in dollars):
�� � �
� (gross income function)
� � � � � � � � � (expense function)
A profit will be realized on the sale of units whenever the grossincome exceeds expenses; i.e., this occurs when �
� � � � � . A loss occurson the sale of units when expenses exceed gross income; i.e., when � � � �
� � . Whenever the sale of units yields zero profit (and zero loss),we call a break-even point ; i.e., when
� � ���� � .
The above approach is “symbolic.” Let’s see how to study profit andloss visually, by studying the graphs of the two functions �
� � and � � .
To begin with, plot the graphs of the two individual functions in the � -coordinate system. We will focus on the situation when the sales figuresare between 0 to 100 units; so the domain of values is the interval� � � . Given any sales figure , we can graphically relate threethings:
� on the horizontal axis;
� a point on the graph of the gross income or expense function;
� � on the vertical axis.

5.6. PROFIT ANALYSIS 71
PSfrag replacements
-axis
-axis
-axis
� � �� �� �� �� �
� � �� � � � � � �
� � � � �� -axis (dollars)
� -axis (units sold)
gros
sin
com
e
�
(a) Gross income graph.
PSfrag replacements
-axis
-axis
-axis
� � �� �� �� �� �
� � �� � � � � � �
� � ��� � �
� -axis (dollars)
� -axis (units sold)
expen
se
�
(b) Expenses graph.
Figure 5.12: Visualizing income and expenses.
If � ��� units sold, there is a unique point � � � ��� � � � ��� � � � � ��� � �� � � onthe gross income graph and a unique point � � � ��� � � ��� � � � � ��� � � � � � onthe expenses graph. Since the � -coordinates of � and � are the functionvalues at � ��� , the height of the point above the horizontal axis iscontrolled by the function.
PSfrag replacements
-axis
-axis
-axis
� ���� �� �� �� �
��� ������ ���� ������ ���� ���� ���� ���
� � ��� � � � �� � �� � � � �
� � �� � � � �
� � �� � � � �
dollars �
sold units �
Figure 5.13: Modelling profit andloss.
If we plot both graphs in the same coordinatesystem, we can visually study the distance betweenpoints on each graph above on the horizontal axis.In the first part of this plot, the expense graph isabove the income graph, showing a loss is realized;the exact amount of the loss will be
� � � �� � , which
is the length of the pictured line segment. Further tothe right, the two graphs cross at the point labeled“ � ”; this is the break-even point; i.e., expense andincome agree, so there is zero profit (and zero loss).Finally, to the right of � the income graph is above the expense graph, sothere is a profit; the exact amount of the profit will be �
� � �� � � , which isthe length of the right-most line segment. Our analysis will be completeonce we pin down the break-even point � . This amounts to solving theequation �
� � � � � .� � � � � � � �
� � � � � � � �
� � � � � �� � � � � � � � � � � � � � � � � � ��� � � � � � � � � � �
Applying the quadratic formula, we get two answers: � � � � � or� �
.Now, we face a problem: Which of these two solutions is the answer
to the original problem? We are going to argue that only the secondsolution � � �
gives us the break even point. What about the other”solution” at � � � � � ? Try plugging � � � � � into the original equation:��� � � � � � �� � � � � � � � � � � . What has happened? Well, when going from

72 CHAPTER 5. FUNCTIONS AND GRAPHS
the second to the third line, both sides of the equation were squared.Whenever we do this, we run the risk of adding extraneous solutions.What should you do? After solving any equation, look back at your stepsand ask yourself whether or not you may have added (or lost) solutions.In particular, be wary when squaring or taking the square root of bothsides of an equation. Always check your final answer in the originalequation.
We can now compute the coordinates of the break-even point usingeither function:
��� ��� � � � ��� � � � � ��� � � � ��� � � ��� � � ��� � � � �

5.7. EXERCISES 73
5.7 ExercisesProblem 5.1. In each of (a)-(h) decide whichequations establish a function relationship be-tween the independent variable � and the de-pendent variable � . Write out the rule for anyfunctions.
a. � � � � �
b. � � � � � ��c. � ��� � �d. � � � �
e. � �����f. � � � � �g. � � � � �h. � � �
� � � � � �
Problem 5.2. For each of the following func-tions, find the expression for� � � � � ��� � � ����
Simplify each of your expressions far enoughso that plugging in
� � � would be allowed.
(a)� � ��� � � � � � � .
(b)� � ��� � � � � �
(c)� � ��� � � � � �
(d)� � ��� � � � ���
(e)� � ��� � ��� � � ��� �
(f)� � ��� � �
� � � . (Hint: Rationalize the nu-merator)
Problem 5.3. Here are the graphs of two lin-ear functions on the domain ��� ��� �"� . Findthe formula for each of the rules � � � � ��� and� ��� � ��� . Find the formula for a NEW func-tion � � ��� that calculates the vertical distancebetween the two lines at � . Explain in termsof the picture what � � ��� is calculating. What is� � �� ? What is � � �"� � ? What are the smallest andlargest values of � � ��� on the domain �� ����"� ?
g(x)
10 20
20
40
60
(20,20)
(20,60)
(0,24)
(0,4)
f(x)PSfrag replacements
� -axis
� -axis
-axis
Problem 5.4. (a) Solve the equation
� �� � � � � � ��� � � �
for � in terms of � . You should get twodifferent functions of � . Describe thelargest possible domain of each func-tion.
(b) Let � and be positive constants. Solvethe equation�
� � �� � � � � � � � � � � �
for � in terms of � . You should get twodifferent functions of � . Describe thelargest possible domain of each func-tion.
(c) Solve the equation
� �� � � � � � ��� � � �
for � in terms of � . You should get twodifferent functions of � . Describe thelargest possible domain of each func-tion.
(d) Let � and be positive constants. Solvethe equation�
� � �� � � � � � � �
� � � �
for � in terms of � . You should get twodifferent functions of � . Describe thelargest possible domain of each func-tion.
Problem 5.5. Dave leaves his office inPadelford Hall on his way to teach in GouldHall. Below are several different scenarios.In each case, sketch a plausible (reasonable)graph of the function � � � � ��� which keepstrack of Dave’s distance � from Padelford Hallat time � . Take distance units to be “feet” andtime units to be “minutes.” Assume Dave’spath to Gould Hall is along a straight linewhich is ������� feet long.

74 CHAPTER 5. FUNCTIONS AND GRAPHS
gould
padelford
PSfrag replacements
-axis-axis
-axis
(a) Dave leaves Padelford Hall and walks ata constant speed until he reaches GouldHall 10 minutes later.
(b) Dave leaves Padelford Hall and walks ata constant speed. It takes him 6 min-utes to reach the half-way point. Thenhe gets confused and stops for 1 minute.He then continues on to Gould Hall atthe same constant speed he had whenhe originally left Padelford Hall.
(c) Dave leaves Padelford Hall and walks ata constant speed. It takes him 6 min-utes to reach the half-way point. Thenhe gets confused and stops for 1 minuteto figure out where he is. Dave then con-tinues on to Gould Hall at twice the con-stant speed he had when he originallyleft Padelford Hall.
(d) Dave leaves Padelford Hall and walks ata constant speed. It takes him 6 min-utes to reach the half-way point. Davegets confused and stops for 1 minute tofigure out where he is. Dave is totallylost, so he simply heads back to his of-fice, walking the same constant speedhe had when he originally left PadelfordHall.
(e) Dave leaves Padelford heading for GouldHall at the same instant Angela leavesGould Hall heading for Padelford Hall.Both walk at a constant speed, but An-gela walks twice as fast as Dave. Indi-cate a plot of “distance from Padelford”vs. “time” for both Angela and Dave.
(f) Suppose you want to sketch the graph ofa new function � � � � ��� that keeps trackof Dave’s distance � from Gould Hall attime � . How would your graphs changein (a)-(e)?
Problem 5.6. At 5 AM one day, a monk be-gan a trek from his monastery by the sea tothe monastery at the top of a mountain. Hereached the mountain-top monastery at 11AM, spent the rest of the day in meditation,and then slept the night there. In the morning,at 5 AM, he began walking back to the seasidemonastery. Though walking downhill should
have been faster, he dawdled in the beautifulsunshine, and ending up getting to the seasidemonastery at exactly 11 AM.
(a) Was there necessarily a time during eachtrip when the monk was in exactly thesame place on both days? Why or whynot?
(b) Suppose the monk walked faster on thesecond day, and got back at 9 AM. Whatis your answer to part (a) in this case?
(c) Suppose the monk started later, at 10AM, and reached the seaside monasteryat 3 PM. What is your answer to part (a)in this case?
Problem 5.7. Sketch a reasonable graph foreach of the following functions. Specify a rea-sonable domain and range and state any as-sumptions you are making. Finally, describethe largest and smallest values of your func-tion.
(a) Height of a person depending on age.
(b) Height of the top of your head as youjump on a pogo stick for 5 seconds.
(c) The amount of postage you must puton a first class letter, depending on theweight of the letter.
(d) Distance of your big toe from the groundas you ride your bike for 10 seconds.
(e) Your height above the water level in aswimming pool after you dive off the highboard.
Problem 5.8. Here is a picture of the graph ofthe function
� � ��� � � � � � � � � � .
PSfrag replacements
� -axis
� -axis
-axis

5.7. EXERCISES 75
Recall the procedure 5.3.1 on page 67.
(a) Find the � and � intercepts of the graph.
(b) Find the exact coordinates of all points� � � � � on the graph which have � -coordinate equal to 5.
(c) Find the coordinates of all points � � � � � onthe graph which have � -coordinate equalto -3.
(d) Which of these points is on the graph:� ���#� ��� , � � ��� ��� , � � � � � � , � � � � � � � ��� .
(e) Find the exact coordinates of the point� � � � � on the graph with � � � ��� �
� .
Problem 5.9. A biochemist is investigatingthe enzyme penicillinase that will “deactivate”penicillin by breaking it into two pieces:
penicillinase penicillinase
intactpenicillin
deac
tivat
ated
PSfrag replacements
-axis-axis
-axis
(a) A vessel contains a solution of wa-ter, penicillinase and penicillin. Ex-perimental calculations show that therate at which penicillinase deacti-vates penicillin molecules is 2000molecules/second; this is called theturnover rate. Find a linear functionwhich computes the number of deac-tivated penicillin molecules after � sec-onds. Sketch the graph for the first 100seconds. How many penicillin moleculesare deactivated after 10 seconds? Howlong does it take to deactivate 50,000penicillin molecules?
(b) Adding an inhibitor to the solution willslow down the reaction. Theoreticalcalculations show that if � grams ofinhibitor are added to the solution,then the new turnover rate is �
�����
�� � �molecules/second. Find a linear func-
tion which computes the number of de-activated penicillin molecules after � sec-onds. (Your equation will involve thevariable “ � ” AND the constant “ � ”; weusually call such an � a parameter.) Forthe first 100 seconds, in a common co-ordinate system, sketch the graphs of
these functions for: � � ��� ��� � � � � � . Makesure to label each of your graphs with itscorresponding function.
(c) Suppose the biochemist wants the so-lution to exhibit a turnover rate of 600molecules/second. How many grams ofinhibitor should be added?
(d) Suppose the biochemist wants exactly6000 molecules of penicillin to be de-activated in a 25 second time period.How many grams of inhibitor should beadded?
Problem 5.10. After winning the lottery, youdecide to buy your own island. The island islocated 1 km offshore from a straight portionof the mainland. You need to get power out tothe island so you can listen to your extensiveCD collection. A power sub-station is located4 km from your island’s nearest location to theshore. It costs $50,000 per km to lay a cablein the water and $30,000 per km to lay a cableover the land.
x
ocean Your Island
Power
4 km
1 kmcable path
PSfrag replacements
-axis-axis
-axis
(a) Explain why we can assume the cablefollows the path indicated in the picture;i.e. explain why the path consists oftwo line segments, rather than a weirdcurved path AND why it is OK to assumethe cable reaches shore to the right ofthe power station and the left of the is-land.
(b) Let � be the location downshore from thepower station where the cable reachesthe land. Find a function
� � ��� in the vari-able � that computes the cost to lay acable out to your island.
(c) Make a table of values of� � ��� , where
� � � , �� , � ,$� , � , � � ,
�� ,4. Use these calcula-
tions to estimate the installation of min-imal cost.

76 CHAPTER 5. FUNCTIONS AND GRAPHS
Problem 5.11. This problem deals with the“mechanical aspects” of working with the ruleof a function. For each of the functions listedin (a)-(c), calculate:
� � ��� , � � � ��� , � � � � � � , � � � � ,� � � ��� � .(a) The function
� � ��� � �� � � � � � on the do-
main of all real numbers.
(b) The function� � ��� � � � � � ! � on the do-
main of all real numbers.
(c) The function� � ��� � � � � .
Problem 5.12. An object is described that es-tablishes a relationship between two variables.Identify the variables, decide which relation-ships are functions and in those cases identifythe independent and dependent variables.
(a) An itemized receipt from the UniversityBook Store.
(b) The index to this text.
(c) A bathroom scale.
(d) A radio dial.
(e) Your math professor’s grade book.
Problem 5.13. Which of the curves in Fig-ure 5.14 represent the graph of a function? Ifthe curve is not the graph of a function, de-scribe what goes wrong and how you might“fix it.” When you describe how to “fix” thegraph, you are allowed to cut the curve intopieces and such that each piece is the graphof a function. Many of these problems havemore than one correct answer.
Problem 5.14. Find an EXACT answer foreach problem.
(a) Solve for �
�� � � �
� � ����
� � � � � � � �
(b) Solve for �� � ��� � �
� � �
(c) Solve for ��� �
�� � �"� � ���
(d) Solve for ���� � ���
���� � � �

5.7. EXERCISES 77
(p)
(a) (b) (c) (d)
(e) (f) (g) (h)
(i) (j) (k) (l)
(m) (n) (o)PSfrag replacements
-axis
-axis
-axis
Figure 5.14: Curves to consider for Problem 5.13

78 CHAPTER 5. FUNCTIONS AND GRAPHS

Chapter 6
Graphical Analysis
We ended the previous section with an in-depth look at a “Profit AnalysisProblem.” In that discussion, we looked at the graphs of the relevantfunctions and used these as visual aids to help us answer the questionsposed. This was a concrete illustration of what is typically called “graph-ical analysis of a function.” This is a fundamental technique we wantto carry forward throughout the course. Let’s highlight the key ideas forfuture reference.
6.1 Visual Analysis of a Graph
A variety of information can be visually read off of a function graph.To see this, we ask ourselves the following question: What is the mostbasic qualitative feature of a graph? To answer this, we need to returnto the definition of the graph (see Equation (5.1) on page 67) and thesurrounding discussion. The key thing about the graph of a function� � � is that it keeps track of a particular set of points in the plane whosecoordinates are related by the function rule. To be precise, a point � �� �� � � will be on the graph of the function
� � � exactly when � � � � � .
6.1.1 Visualizing the domain and range
A function is a package that consists of a rule � � � � � , a domain ofallowed -values and a range of output � -values. The domain can bevisualized as a subset of the -axis and the range as a subset of the� -axis. If you are handed the domain, it is graphically easy to describethe range values obtained; here is the procedure:
Important Procedure 6.1.1. Look at all points on the graph correspond-ing to domain values on the -axis, then project these points to the � -axis.The collection of all values you obtain on the � -axis will be the range ofthe function. This idea of “projection” is illustrated in the two graphs be-
79

80 CHAPTER 6. GRAPHICAL ANALYSIS
low. We use arrows “ � ” to indicate going from a domain -value, up to thegraph, then over to the � -axis:
PSfrag replacements
-axis
-axis
-axisdomain ��� � � ���
range �� �� � �� �
graph of� � � ���� �����
(a) Domain: � � � �� .
PSfrag replacements
-axis
-axis
-axis
domain��� ��� �����
range ��� � � ���
graph of� � � ���� �����
(b) Domain: � � � ����� .
Figure 6.1: Example projections.
6.1.2 Interpreting Points on the GraphWe can visually detect where a function has positive or negative values:
Important Fact 6.1.2. The function values� � � control the height of the
point � � � � � � � � � � on the graph above the -axis; if the function value� � �
is negative, the point � � � is below the -axis.PSfrag replacements
� -axis
� -axis
-axis
� �� ���� �� �� � �
� �� � units above � -axis
�� �� �
�units below the � -axis
� �� � �
���� � �� �� � � �
� �� � � units above the � -axis
� �� �
� �� � � �� � � � � � � � � �
�
Figure 6.2: Interpreting points on a graph.
In Figure 6.2 we can now divide the domain (in this case the whole num-ber line) into segments where the function is above, below or crossing theaxis. Keeping track of this information on a number line is called a sign

6.1. VISUAL ANALYSIS OF A GRAPH 81
plot for the function. We include a “shadow” of the graph in Figure 6.3to emphasize how we arrived at our “positive” and “negative” labeling ofthe sign plot; in practice we would only provide a labeled number line.
PSfrag replacements
� -axis
-axis
-axis
negativenegative
positivepositive
Figure 6.3: Sign plot.
By moving through a sequence of values we can investigate how thecorresponding points on the graph move “up and down”; this then givesus a dynamic visual sense of how the function values are changing. Forexample, in Figure 6.4, suppose we let move from 1 to 5, left to right;we have indicated how the corresponding points on the curve will moveand how the function values will change.PSfrag replacements
� -axis
� -axis
-axis
#3:
� �� �
� � � �
� � � �� � � �
� � �� #1: � values move from � to
�
#2: points on graph move from
�to
�
graph of � � � � � �
�
� �� � values move
like this
Figure 6.4: Dynamic interpretation of a graph.
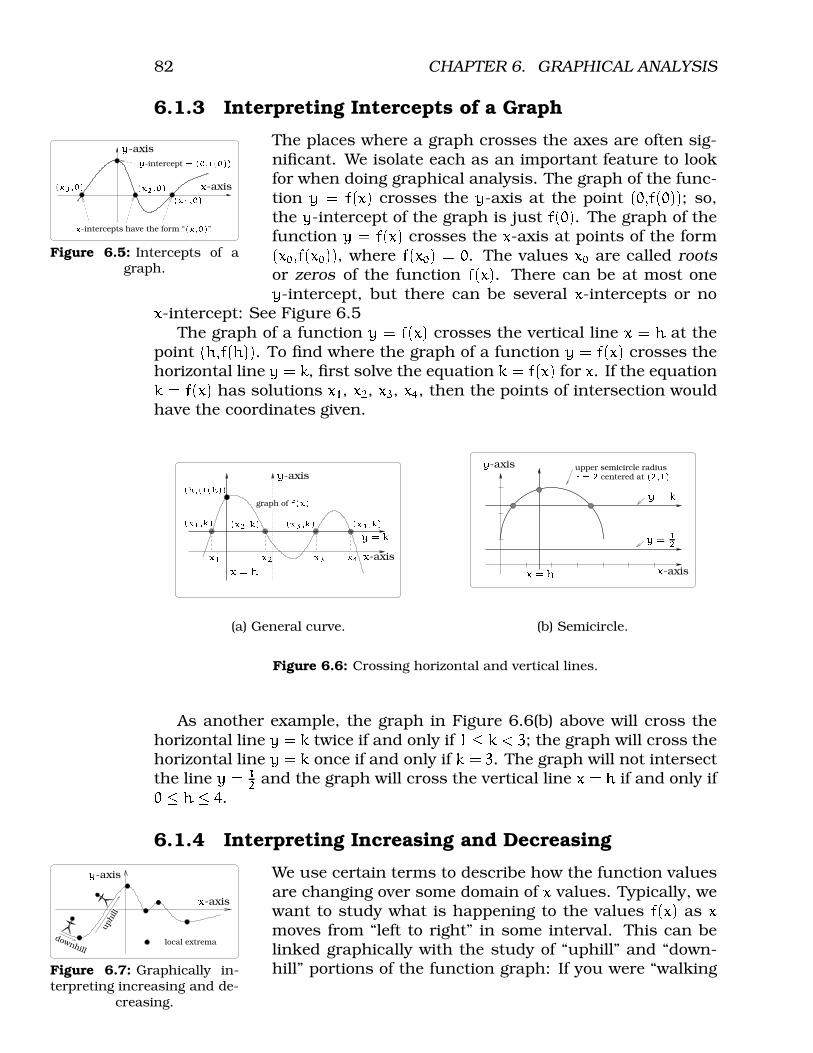
82 CHAPTER 6. GRAPHICAL ANALYSIS
6.1.3 Interpreting Intercepts of a Graph
PSfrag replacements
� -axis
� -axis
-axis
� -intercepts have the form “� � � ��� ”
� ��� ��� � �
�� ���
� ��� ���
�-intercept
� � ��� � � �����
Figure 6.5: Intercepts of agraph.
The places where a graph crosses the axes are often sig-nificant. We isolate each as an important feature to lookfor when doing graphical analysis. The graph of the func-tion � � � � � crosses the � -axis at the point
� � � � � � � � ; so,the � -intercept of the graph is just
� � � � . The graph of thefunction ��� � � � crosses the -axis at points of the form� � � � � � � � , where
� � � � � � . The values � are called rootsor zeros of the function
� � � . There can be at most one� -intercept, but there can be several -intercepts or no
-intercept: See Figure 6.5The graph of a function � � � � � crosses the vertical line � �
at thepoint
� � � � � � � � . To find where the graph of a function � � � � � crosses thehorizontal line � � �
, first solve the equation� � � � � for . If the equation
� � � � � has solutions � , � , � , � , then the points of intersection wouldhave the coordinates given.
PSfrag replacements
� -axis
� -axis
-axis
graph of� � � �
�������� ��� ���
� ��� � � � �
�� � � � �
�� � � � �
�� � �
��
��
��
��
� � ��� �
(a) General curve.
PSfrag replacements
� -axis
� -axis-axis
upper semicircle radius � �centered at
� � � � �� � �� � ��
�� �
(b) Semicircle.
Figure 6.6: Crossing horizontal and vertical lines.
As another example, the graph in Figure 6.6(b) above will cross thehorizontal line � � �
twice if and only if � ; the graph will cross thehorizontal line � � �
once if and only if� � . The graph will not intersect
the line � � �� and the graph will cross the vertical line � �if and only if
� � �.
6.1.4 Interpreting Increasing and Decreasing
PSfrag replacements
� -axis
� -axis-axis
downhill
uphi
ll
�local extrema
Figure 6.7: Graphically in-terpreting increasing and de-
creasing.
We use certain terms to describe how the function valuesare changing over some domain of values. Typically, wewant to study what is happening to the values
� � � as moves from “left to right” in some interval. This can belinked graphically with the study of “uphill” and “down-hill” portions of the function graph: If you were “walking

6.1. VISUAL ANALYSIS OF A GRAPH 83
to the right” along the graph, the function values are in-creasing if you are walking uphill. Likewise, if you were
“walking to the right” along the graph, the function values are decreasingif you are walking downhill.
Once we understand where the graph is moving uphill and downhill,we can isolate the places where we change from moving uphill to down-hill, or vice versa; these “peaks” and “valleys” are called local maximaand local minima. Some folks refer to either case as a local extrema.People have invested a lot of time (centuries!) and energy (lifetimes!) intothe study of how to find local extrema for particular function graphs. Wewill see some basic examples in this course and others will surface infuture courses once you have the tools of calculus at your disposal. Ex-amples range from business applications that involve optimizing profit tounderstanding the three-dimensional shape a of biological molecule.
PSfrag replacements
-axis
-axis
-axis
� � �� � �� � �� � � �� � � �� � � �
� � �
ft above gliderport
minutes
Figure 6.8: Hanglider eleva-tions.
Example 6.1.3. A hang glider launches from a gliderportin La Jolla. The launch point is located at the edge of a500 ft. high cliff over the Pacific Ocean. The elevation ofthe pilot above the gliderport after � minutes is given by thegraph in Figure 6.8:
1. When is the pilot climbing and descending?
2. When is the pilot at the glider port elevation?
3. How much time does the pilot spend flying level?
Solution.
1. Graphically, we need to determine the portions of the graph thatare increasing or decreasing. In this example, it is increasing when� � � and
� � �. And, it is decreasing when � �
and� � � .
2. Graphically, this question amounts to asking when the elevationis 0, which is the same as finding when the graph crosses the hori-zontal axis. We can read off there are four such times: � ��� �
�� � � � .
3. Graphically, we need to determine the portions of the graph that aremade up of horizontal line segments. This happens when � � and
� � �. So, our pilot flies level for a total of 3 minutes.

84 CHAPTER 6. GRAPHICAL ANALYSIS
6.2 Circles and Semicircles
Back in Chapter 3, we discussed equations whose graphs were circles:We found that the graph of the equation
� � � � � � �� � � � � ��� � (6.1)
is a circle of radius � centered at the point� � � � � . It is possible to ma-
nipulate this equation and become confused. We could rewrite this as�� � � � � � � � � � � � � � , then take the square root of each side. However,
the resulting equivalent equation would be
� � �� � � � � � � � �
and the presence of that � sign is tricky; it means we have two equations:
� � � � � � � � � � � � or
� � � � � � � � � � � � �Each of these two equations defines a function:
� � � � � � � � � � � � � � or (6.2)
�� � � � � � � � � � � � � � (6.3)
So, even though the Equation 6.1 is not a function, we were able to ob-tain two different functions
� � � and �� � from the original equation. The
relationship between the graph of the original equation and the graphsof the two functions in (6.2) and (6.3) is as follows: The upper semicircleis the graph of the function
� � � and the lower semicircle is the graph ofthe function �
� � .PSfrag replacements
-axis
-axis
-axis
��� � � ���� � � �
upper semicircle
lower semicircle
Graph of ����� � � �Graph of � ��� � � �
� -axis � -axis
� -axis� -axis
Figure 6.9: Upper and lower semicircles.

6.2. CIRCLES AND SEMICIRCLES 85
Example 6.2.1. A tunnel connecting two portions of a space station hasa circular cross-section of radius 15 feet. Two walkway decks are con-structed in the tunnel. Deck A is along a horizontal diameter and anotherparallel Deck B is 2 feet below Deck A. Because the space station is ina weightless environment, you can walk vertically upright along Deck A,or vertically upside down along Deck B. You have been assigned to paint“safety stripes” on each deck level, so that a 6 foot person can safely walkupright along either deck. Determine the width of the “safe walk zone” oneach deck.
PSfrag replacements
� -axis
-axis
-axis
� �� ft
Deck A
Deck B
(a) Cross-section oftunnel.
PSfrag replacements
-axis
-axis
-axis
Deck A
Deck B�
Safe walk zone
(b) Walk zones.
Figure 6.10: Space stationtunnels.
Solution. Impose a coordinate system so that the origin isat the center of the circular cross section of the tunnel; bysymmetry the walkway is centered about the origin. Withthis coordinate system, the graph of the equation � � � � �� � � � � � will be the circular cross-section of the tunnel.
In the case of Deck � , we basically need to determinehow close to each edge of the tunnel a 6 foot high personcan stand without hitting his or her head on the tunnel;a similar remark applies to Deck � . This means we arereally trying to fit two six-foot-high rectangular safe walkzones into the picture:
Our job is to find the coordinates of the four points� , � ,
�, and � . Let’s denote by � , � , � ,and � the -
coordinates of these four points, then � � � � � � � , � �� � � � � , � � � � � � � � , and � � � � � � � � . To find � , � , � ,and � , we need to find the intersection of the circle inFigure 6.10(b) with two horizontal lines:
� Intersecting the the upper semicircle with the hori-zontal line having equation � � � will determine �and � ; the upper semicircle is the graph of
� � � �� � � � � � .� Intersecting the lower semicircle with the horizontal line having equa-
tion � � � � will determine � and � ; the lower semicircle is the graphof �
� � � �� � � � � � .
For Deck � , we simultaneously solve the system of equations�� � � � � � � �� � � � �
Plugging in � � � into the first equation of the system gives � � � � � �� � � � � ; i.e., � �� � � � � � � � � � This tells us that � � � � � � � � � � � and
� � �� � � � � � � . In a similar way, for Deck � , we find
� � � � � � � � � � � � and� � �
� � � � � � � � �

86 CHAPTER 6. GRAPHICAL ANALYSIS
In the case of Deck � , we would paint a safety stripe � � � � feet to theright and left of the centerline. In the case of Deck � , we would paint asafety stripe � � � � feet to the right and left of the centerline.
6.3 Multipart FunctionsSo far, in all of our examples we have been able to write
� � � as a nicecompact expression in the variable . Sometimes we have to work harder.As an example of what we have in mind, consider the graph in Fig-ure 6.11(a):
1
−1
1 2 3 4
PSfrag replacements
� -axis
� -axis
-axis
(a) Graphing a multipartfunction.
� � � �
������ ������ if � if �
� if � if
�� if �
�
(b) Writing a multipartfunction.
Figure 6.11: A multipart function.
The curve we are trying to describe in this picture is made up of fivepieces; four little line segments and a single point. The first thing tonotice is that on the domain �
�, this curve will define the graph of
some function� � � . To see why this is true, imagine a vertical line moving
from left to right within the domain � �
on the -axis; any one ofthese vertical lines will intersect the curve exactly once, so by the verticalline test, the curve must be the graph of a function. Mathematicians usethe shorthand notation above to describe this function. Notice how therule for
� � � involves five cases; each of these cases corresponds to oneof the five pieces that make up the curve. Finally, notice the care withthe “open” and “closed” circles is really needed if we want to make surethe curve defines a function; in terms of the rule, these open and closedcircles translate into strict inequalities like or weak inequalities like .This is an example of what we call a multipart function.
The symbolic appearance of multipart functions can be somewhatfrightening. The key point is that the graph (and rule) of the functionwill be broken up into a number of separate cases. To study the graphor rule, we simply “home in” on the appropriate case. For example, inthe above illustration, suppose we wanted to compute
� � � � � � . First, wewould find which of the five cases covers � � � � , then apply that part ofthe rule to compute
� � � � � � � .

6.3. MULTIPART FUNCTIONS 87
Our first multipart function example illustrated how to go from agraph in the plane to a rule for
� � � ; we can reverse this process andgo from the rule to the graph.
Example 6.3.1. Sketch the graph of the multipart function
�� � �
�� � if � �
��� � if �
if � PSfrag replacements
� -axis
� -axis-axis
first part of graph
second partof graph
third part of graph
�graph of �
� � �
Figure 6.12: Multipart func-tion � � � � .
Solution. The graph of �� � will consist of three pieces.
The first case consists of the graph of the function � ��� � � on the domain � , this consists of all points
on the horizontal line � � to the left of and including thepoint
� � � � . We have “lassoed” this portion of the graphin Figure 6.12. Likewise, the third case in the definitionyields the graph of the function � � �
� � � on the domain � ; this is just all points on the horizontal line � � to the right of and including the point
� � � . Finally, we
need to analyze the middle case, which means we need tolook at the graph of �
��� � on the domain � . This is just
the upper semicircle of the circle of radius 1 centered at� � � � . If we paste
these three pieces together, we arrive at the graph of �� � .
2
5
4
3
2
1
1
PSfrag replacements
-axis
-axis
-axis
feet
seconds
Figure 6.13: Dribbling.
Example 6.3.2. You are dribbling a basketball and thefunction � � � ��� keeps track of the height of the ball’s cen-ter above the floor after � seconds. Sketch a reasonablegraph of � � � ��� .
Solution. If we take the domain to be � � �� (the first 2seconds), a reasonable graph might look like Figure 6.13.This is a multipart function. Three portions of the graph are decreasingand two portions are increasing. Why doesn’t the graph touch the � axis?

88 CHAPTER 6. GRAPHICAL ANALYSIS
6.4 ExercisesProblem 6.1. The absolute value function isdefined by the multipart rule:
��
��
�� if �� �
� � if � � �
The graph of the absolute value function is pic-tured below:
y=| x |
PSfrag replacements � -axis
� -axis
-axis
(a) Calculate:��
�,
��
�,
�� �
�.
(b) Solve for � :��
�� � ;
��
�� � ,
��
�� � � .
(c) Sketch the graph of � � �� � � � and � � �
��
in the same coordinate system. Findwhere the two graphs intersect, label thecoordinates of these point(s), then findthe area of the region bounded by thetwo graphs.
Problem 6.2. For each of the following func-tions, graph
� � � � and � � ��� � � � � � � �in the same
coordinate system and give the multipart rulefor � � � � .
(a)� � ��� � � � � � �
(b)� � ��� ��� � �
(c)� � � � � � � �
Problem 6.3. Solve each of the following equa-tions for � .
(a) � � ��� � � , where � � ��� � �� � �
�(b)� � ��� � �� where� � ��� � �
� � if � � � ,� � � if ����� .
(c)� � ��� � � � where
� � ��� ��� � � � � if �� � � ,� � �
$ � if � % � � .
Problem 6.4. Pizzeria Buonapetito makes atriangular-shaped pizza with base width of 30inches and height 20 inches as shown. Alicewants only a portion of the pizza and does soby making a vertical cut through the pizza andtaking the shaded portion. Letting � be thebottom length of Alice’s portion and � be thelength of the cut as shown, answer the follow-ing questions:
y
x x
y
10 20
20
shaded region is the piece Alice takes
PSfrag replacements
-axis-axis
-axis
(a) Find a formula for � as a multipart func-tion of � , for � � � ����� . Sketch the graphof this function and calculate the range.
(b) Find a formula for the area of Alice’sportion as a multipart function of � , for� � � � ��� .
(c) If Alice wants her portion to have halfthe area of the pizza, where should shemake the cut?
Problem 6.5. This problem deals with carstraveling between Bellevue and Spokane,which are 280 miles apart. Let � be the timein hours, measured from 12:00 noon; for ex-ample, � � � � is 11:00 am.
(a) Joan drives from Bellevue to Spokane ata constant speed, departing from Belle-vue at 11:00 am and arriving in Spokaneat 3:30 pm. Find a function � � ��� thatcomputes her distance from Bellevue attime � . Sketch the graph, specify the do-main and determine the range.
(b) Steve drives from Spokane to Bellevueat 70 mph, departing from Spokane at12:00 noon. Find a function � � ��� for hisdistance from Bellevue at time � . Sketchthe graph, specify the domain and deter-mine the range.

6.4. EXERCISES 89
(c) Find a function � � ��� that computes thedistance between Joan and Steve attime � .
Problem 6.6. A baseball diamond is a squarewith sides of length 90 ft. Assume Edgar hits ahome run and races around the bases (coun-terclockwise) at a speed of 18 ft/sec. Expressthe distance between Edgar and home plate asa function of time � . (Hint: This will be a mul-tipart function.) Try to sketch a graph of thisfunction.
d(t)
home plate
90 ftedgar
PSfrag replacements
-axis-axis
-axis
Problem 6.7. A course uses four scores to de-termine your final grade. These scores arenumbers between 0 and 100; one each forhomework � , quizzes � , midterm exams �and a final exam � . The professor first calcu-lates your course percentage � , based on thisinformation:
� Homework � is worth 10%.� Quizzes � are worth 20%.� Midterms � are worth 30%.� Final � is worth 40%.
(a) Find an equation involving � , � , � , � forcalculating your course percentage � . Ifyour scores are � � ! � , � � ��� , � � � � ,� � ��� , what is your course percentage?
(b) Assume these facts:� A course grade is either 0 or a dec-
imal number between 0.7 and 4.0.� A course percentage of � � ��! gives
a grade of 4.0 and a course per-centage of � � �"� gives a grade of0.7. Between these two percent-ages, the grade is given by a linearfunction.
Find a multipart function that calculatesthe grade based on the course percent-age � . Make sure to specify the domainand range of this function.
(c) If your scores are � � ! � , � � ��� , � � � � ,� � ��� , what is your final grade?
(d) What course percentage is needed to geta grade of 3.7?
Problem 6.8. A polynomial function � � � � ���has the form
��� � � � � � � � � � ��� � � � � �� � ����� � ��� � � � ��� � � ���
� �
where � � � � � � � � �� � � �� � � � � � � � are all given con-stants. The degree of a polynomial � � ��� is thehighest power of � occuring in the expression� � � � ��� . (Note: Linear functions, which havethe standard equation form � � � � � , aredegree one polynomial functions. Quadraticfunctions, which have the standard equationform � � � � � � � � � , are degree two poly-nomial functions.) The roots of a polynomialfunction � � � � ��� are the � -intercepts for thegraph; these are found by factoring the poly-nomial � � ��� into degree one terms.
(a) Use factoring to find the � intercepts ofthe graphs of these quadratic polynomi-als: � � � � � � � ! , � � � � ��� � � � and� � � � � �� � � � , where � � � � are con-stants.
(b) If � � � � ��� is a polynomial of degree 2 and� � � � ��� is a polynomial of degree 3, whatare the degrees of the NEW polynomials:� � � � ��� � � ��� , � � � � ��� � � � ��� , � ��� � � � � � � � �
.
(c) This question will focus on a degreethree polynomial; these are called cubicpolynomials.
(c1) Sketch an accurate graph of thepolynomial � � � � ����� � $ � � byplotting points of the form � � � � � � � � ,where � is a multiple of �
�.
(c2) Sketch the graphs of � � � � � ��� and��� � � � � � �
and write out the functionrules explicitly.
(c3) Find a constant � so that the rootsof � � � � � ��� are � � � � ����� .

90 CHAPTER 6. GRAPHICAL ANALYSIS
(c4) Sketch the graph of � � � � � ��� andfind its roots � � � � � . What feature(s)of the graph of � � � � ��� correlatewith the roots � � ��� � ?
Problem 6.9. Pagliacci Pizza has designed acardboard delivery box from a single piece ofcardboard, as pictured.
(a) Find a polynomial function � � ��� thatcomputes the volume of the box in termsof � . What is the degree of � ?
(b) Find a polynomial function � � ��� thatcomputes the exposed surface area ofthe closed box in terms of � . What isthe degree of � ? What are the explicit di-mensions if the exposed surface area ofthe closed box is !���� sq. inches?
remove squares to get
20 in
50 in
x
x
x
x
NOT TO SCALE
PSfrag replacements
-axis-axis
-axis
Problem 6.10. The vertical cross-section of adrainage ditch is pictured below:
3D−view of ditch
PSfrag replacements
-axis-axis
-axis
R
R R
R
20 ft 20 ft
vertical cross−section
PSfrag replacements
-axis-axis
-axis
Here, � indicates a circle of radius 10 feet andall of the indicated circle centers lie along the
common horizontal line 10 feet above and par-allel to the ditch bottom. Assume that water isflowing into the ditch so that the level abovethe bottom is rising 2 inches per minute.
(a) When will the ditch be completely full?
(b) Find a multipart function that modelsthe vertical cross-section of the ditch.
(c) What is the width of the filled portion ofthe ditch after 1 hour and 18 minutes?
(d) When will the filled portion of the ditchbe 42 feet wide? 50 feet wide? 73 feetwide?
Problem 6.11. The graph of a function � �� � ��� on the domain � ! � � � ! consistes of linesegments and semicircles of radius 2 connect-ing the points � � !&� � � � � � � � � � � � ��� � � � � � � � � � � !&� ��� .
PSfrag replacements
� -axis
� -axis
-axis
(a) What is the range of � ?(b) Where is the function increasing? Where
is the function decreasing?
(c) Find the multipart formula for � � � � ��� .(d) If we restrict the function to the smaller
domain � � � � � , what is the range?
(e) If we restrict the function to the smallerdomain �� � � � , what is the range?
Problem 6.12. (a) Simply as far as possible
���� ��
� �� � �
(b) Find � , , � that simultaneously satisfythese three equations:
� �� � � � ��� � �� � � � �� �� � � � � �

Chapter 7
Quadratic Modeling
If you kick a ball through the air enough times, you will find its pathtends to be parabolic. Before we can answer any detailed questions aboutthis situation, we need to get our hands on a precise mathematical modelfor a parabolic shaped curve. This means we seek a function � � � � �whose graph reproduces the path of the ball.
PSfrag replacements
-axis
-axis
-axis
ground level
Figure 7.1: Possible paths for a kicked ball are parabolic.
7.1 Parabolas and Vertex Form
OK, suppose we sit down with an � -coordinate system and draw fourrandom parabolas; let’s label them I, II, III, and IV: See Figure 7.2. Therelationship between these parabolas and the fixed coordinate systemcan vary quite a bit: The key distinction between these four curves isthat only I and IV are the graphs of functions; this follows from the ver-tical line test. A parabola that is the graph of a function is called astandard parabola. We can see that any standard parabola has threebasic features:
91

92 CHAPTER 7. QUADRATIC MODELING
PSfrag replacements
� -axis
� -axis
-axis
I
II
IIIIV
not graphs of functions
Figure 7.2: Relationship between a fixed coordinate system and various parabolas.
� the parabola will either open “upward” or “downward”;
� the graph will have either a “highest point” or “lowest point,” calledthe vertex;
� the parabola will be symmetric about some vertical line called theaxis of symmetry.
Our first task is to describe the mathematical model for any standardparabola. In other words, what kind of function equations ��� � � � giveus standard parabolas as their graphs? Our approach is geometric andvisual:
� Begin with one specific example, then show every other standardparabola can be obtained from it via some specific geometric ma-neuvers.
� As we perform these geometric maneuvers, we keep track of how thefunction equation for the curve is changing.
This discussion will amount to a concrete application of a more generalset of tools developed in the following section of this chapter.
−6 −4 −2 2 4 6
5
10
15
20
25
30
35PSfrag replacements
� -axis
� -axis
-axis
Figure 7.3: Graph of � � � � .
Using a graphing device, it is an easy matter to plotthe graph of � � � and see we are getting the parabolapictured in Figure 7.3. The basic idea is to describe howwe can manipulate this graph and obtain any standardparabola. In the end, we will see that standard parabolasare obtained as the graphs of functions having the form
� � � � � � � � �

7.1. PARABOLAS AND VERTEX FORM 93
for various constants�, � , and � , with
� �� � . A function of this type iscalled a quadratic function and these play a central role throughout thecourse. We will divide our task into two steps.
First we show every standard parabola arises as the graph of a func-tion having the form
� � � � � � � � � � �for some constants
�,�, and
�, with
� �� � . This is called the vertexform of a quadratic function. Notice, if we were to algebraically expandout this equation, we could rewrite it in the � � � � ��� � � form. Forexample, suppose we start with the vertex form � � � � � � � � , sothat
� � � � � � � � � . Then we can rewrite the equation in the form� � � � � � � � as follows:
� � � � � � ��� � � � � � � � � � � �� � � �
so� � � � � � �
�� � � �
. The second step is to show any quadratic functioncan be written in vertex form; the underlying algebraic technique usedhere is called completing the square. This is a bit more involved. Forexample, if you are simply handed the quadratic function � � � � � � � ,it not at all obvious why the vertex form is obtained by this equality:
� � � � � � � � � � � � � �The reason behind this equality is the technique of completing the square.In the end, we will almost always be interested in the vertex form of aquadratic. This is because a great deal of qualitative information aboutthe parabolic graph can simply be “read off” from this form.
7.1.1 First Maneuver: Shifting
−6 −4 −2 2 4 6
10
30
40
20
PSfrag replacements
� -axis
� -axis
-axis
Figure 7.4: Shift to the right.
Suppose we start with the graph in Figure 7.3 and hori-zontally shift it
�units to the right. To be specific, con-
sider the two cases� � � and
� ��. To visualize this,
imagine making a wire model of the graph, set in on topof the curve, then slide the wire model
�units to the right.
What you will obtain are the two “dashed curves” in Fig-ure 7.4. We will call the process just described a hori-zontal shift. Since the “dashed curves” are no longer theoriginal parabola in Figure 7.3, the corresponding func-tion equations must have changed.
Using a graphing device, you can check that the corresponding equa-tions for the dashed graphs would be
� � � � � � �� � �
� �
��

94 CHAPTER 7. QUADRATIC MODELING
which is the plot with lowest point� � � � � and
� � � ��� �
� � � � � � �which is the plot with lowest point
� � � � � . In general, if�
is positive, thegraph of the function � � � � � � � is the parabola obtained by shifting thegraph of � �� � by
�units to the right.
−6 −4 −2 2 4 6
20
30
40
10
PSfrag replacements
� -axis
� -axis
-axis
Figure 7.5: Shift to the left.
Next, if�
is negative, shifting�
units to the right is thesame as shifting
� � �units left! On the domain � � � ,
Figure 7.5 indicates this for the cases� � � � � �
�, using
“dashed curves” for the shifted graphs and a solid linefor the graph of ��� � . Using a graphing device, we cancheck that the corresponding equations for the dashedgraphs would be
� � � � � � � � � �� � � � � �� � �
� �
��
which is the plot with lowest point� � � � � � and
� � � � � ��� � �
� � ��� �
� � � � � � �which is the plot with lowest point
� ��� � � . In general, if
�is negative, the
graph of the function � � � � � � � gives the parabola obtained by shiftingthe graph of � �� � by
� � �units to the LEFT.
The conclusion thus far is this: Begin with the graph of � � � inFigure 7.3. Horizontally shifting this graph
�units to the right gives a
new (standard) parabola whose equation is � � � � � � � .
−6 −4 4 6
20
30
40
−2
10
−10
2
PSfrag replacements
� -axis
� -axis
-axis
Figure 7.6: Vertical shifts.
We can also imagine vertically shifting the graph inFigure 7.3. This amounts to moving the graph
�units
vertically upward. It turns out that this vertically shiftedgraph corresponds to the graph of the function � �� � � �
.We can work out a few special cases and use a graphingdevice to illustrate what all this really means.
Figure 7.6 illustrates the graphs of � � � � �in the
cases when� �
�, � and
� � ��, � � , leading to vertically
shifted graphs. Positive values of�
lead to the upper two“dashed curves” and negative values of
�lead to the lower two “dashed
curves”; the plot of � � � is again the solid line. The equations givingthese graphs would be � � � � � , � � � �
�, � � � �
�and � � � � � ,
from bottom to top dashed plot.If we combine horizontal and vertical shifting, we end up with the
graphs of functions of the form � � � � � � � � �. Figure 7.7(a) illustrates

7.1. PARABOLAS AND VERTEX FORM 95
the four cases with corresponding equations � � � � � � � ��; as an exercise,
identify which equation goes with each curve.
−6 −4 4 6
20
30
40
10
−2 2
PSfrag replacements
� -axis
� -axis
-axis
(a) Combined shifts.
−6 −4 4 6
−30
−20
10
20
30
−2−10
2
PSfrag replacements
� -axis
� -axis
-axis
(b) Reflections.
−6 −4 −2 2 4 6
5
10
15
20
25
30
PSfrag replacements
� -axis
� -axis
-axis
(c) Vertical dilations.
Figure 7.7: Shifts, reflec-tions, and dilations.
7.1.2 Second Maneuver: ReflectionNext, we can reflect any of the curves � ��� � � obtainedby horizontal or vertical shifting across the -axis. Thisprocedure will produce a new curve which is the graph ofthe new function � � ��� � � . For example, begin with thefour dashed curves in the previous figure. Here are thereflected parabolas and their equations are � � � � � � � � ��: See Figure 7.7(b).
7.1.3 Third Maneuver: Vertical DilationIf
�is a positive number, the graph of ��� � � is usually
called a vertical dilation of the graph of � � � . There aretwo cases to distinguish here:
� If�� , we have a vertically expanded graph.
� If � � , we have a vertically compressed graph.
This is illustrated for� � � (upper dashed plot) and
� � � � (lower dashed plot): See Figure 7.7(c).
7.1.4 ConclusionStarting with � � � in Figure 7.3, we can combine to-gether all three of the operations: shifting, reflection anddilation. This will lead to the graphs of functions thathave the form:
� � � � � � � � � � �for some
�,�
and�,� ���� . If you think about it for awhile,
it seems pretty easy to believe that any standard parabolaarises from the one in Figure 7.3 using our three geomet-ric maneuvers. In other words, what we have shown isthat any standard parabola is the graph of a quadratic equation in vertexform. Let’s summarize.
Important Fact 7.1.1. A standard parabola is the graph of a function� � � � � � � � � � � � � �
, for some constants�,�
, and�
and� �� � . The
vertex of the parabola is� � � � � and the axis of symmetry is the line � �
. If�� � , then the parabola opens upward; if
� � , then the parabola opens
downward.

96 CHAPTER 7. QUADRATIC MODELING
Example 7.1.2. Describe a sequence of geometric operations leading fromthe graph of � �� � to the graph of � � � � � � � � � � � � � .
PSfrag replacements
-axis
-axis
-axis
reflect across � -axis
horizontal shift by� � �
vertical dilate by�
vertical shift by� � �� � � � � � �
���
(a) What do the symbols ofan equation mean?
−6 −4 −2 4 6
5
15
20
2
10
−5
−10
−15
PSfrag replacements
� -axis
� -axis
-axis
(b) What does theequation look like?
Figure 7.8: Interpreting anequation.
Solution. To begin with, we can make some initial conclu-sions about the specific shifts, reflections and dilationsinvolved, based on looking at the vertex form of the equa-tion. In addition, by Fact 7.1.1, we know that the vertexof the graph of � � � � � is
� � � � , the line � is a vertical
axis of symmetry and the parabola opens downward.We need to be a little careful about the order in which
we apply the four operations highlighted. We will illus-trate a procedure that works. The full explanation for thesuccess of our procedure involves function compositionsand we will return to that at the end of Chapter 8. Theorder in which we will apply our geometric maneuvers isas follows:
horizontal shift � vertical dilate� reflect� vertical shift
Figure 7.8(b) illustrates the four curves obtained by ap-plying these successive steps, in this order. As a refer-ence, we include the graph of � � � as a “dashed curve”:
� A horizontal shift by� � yields the graph of
� � � � � � ; this is the fat parabola opening upwardwith vertex
� � � � .
� A dilation by� � yields the graph of � � � �� � � ; this is the skinny
parabola opening upward with vertex� � � � .
� A reflection yields the graph of � � � � � � � ; this is the downwardopening parabola with vertex
� � � � .
� A vertical shift by� ��� yields the graph of � � � � � � � � � ; this is
the downward opening parabola with vertex� � � � .
7.2 Completing the Square
By now it is pretty clear we can say a lot about the graph of a quadraticfunction which is in vertex form. We need a procedure for rewriting agiven quadratic function in vertex form. Let’s first look at an example.

7.2. COMPLETING THE SQUARE 97
Example 7.2.1. Find the vertex form of the quadratic function � � � � �� � .
Solution. Since our goal is to put the function in vertex form, we can writedown what this means, then try to solve for the unknown constants. Ourfirst step would be to write
� � � � � � � � � � � � � � �for some constants
�,�,
�. Now, expand the right hand side of this
equation and factor out coefficients of and � :� � � � � � � � � � � � � �
� � � � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � �� �
� � � � � � � � � � � � � � � � � � � � � � � � � ��� � �� � � �
If this is an equation, then it must be the case that the coefficients oflike powers of match up on the two sides of the equation in Figure 7.9.Now we have three equations and three unknowns (the
� � � � � ) and we
PSfrag replacements
-axis
-axis
-axis� � ���� ��� �
� � � �������� � � � � � � ���� ��� �� ��� ��������
� � � � ��� �� � � � � � � ��� � ��� �� ��� �
Equal
EqualEqual
Figure 7.9: Balancing the coefficients.
can proceed to solve for these:
� � �� � � � � �� � � � �
� �
The first equation just hands us the value of� � � . Next, we can plug
this value of�
into the second equation, giving us� � � � � �� � � � � � �� � � �

98 CHAPTER 7. QUADRATIC MODELING
so� � . Finally, plug the now known values of
�and
�into the third
equation:
� � � � �� �
� � � � � � �
� � � � �so
� ��� . Our conclusion is then
� � � � � � � � � � � � � �Notice, this is the quadratic we studied in Example 7.1.2 on page 96.
The procedure used in the preceding example will always work torewrite a quadratic function in vertex form. We refer to this as completingthe square.
Example 7.2.2. Describe the relationship between the graphs of � � �and � � � � � � �
� � � � � � .
−6 −4 −2 4 6
−20
10
20
2
−10
PSfrag replacements
� -axis
� -axis
-axis
Figure 7.10: Maneuvering� � � � .
Solution. We will go through the algebra to complete thesquare, then interpret what this all means in terms ofgraphical maneuvers. We have
�� � � � � � � � � � � � � � �
� ��� � � � � � � � � � � � � � � � � ��� � �
� � � �This gives us three equations:
��
� �� � � � � �� � � � �
� � �We conclude that
� � ��� � � � � � �� � � and
� � ��� � � � � � � . So, this tells
us that we can obtain the graph of ��� � � � from that of ��� � by thesesteps:
� Horizontally shifting by� � � �� � � units gives � � � � � � � � � � � .
� Vertically dilate by the factor� �
�gives � �
� � � � �� � � � � .� Reflecting across the -axis gives � � �
� � � � � � � � � � .� Vertically shifting by
� � � � � � gives � � � � � � �� � � � �� � � � � � � � � � .
Example 7.2.3. A drainage canal has a cross-section in the shape of aparabola. Suppose that the canal is 10 feet deep and 20 feet wide at thetop. If the water depth in the ditch is 5 feet, how wide is the surface of thewater in the ditch?

7.3. INTERPRETING THE VERTEX 99
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PSfrag replacements
-axis
-axis
-axis
centerline� �
feet
� � feet
Figure 7.11: A drainagecanal.
Solution. Impose an � -coordinate system so that theparabolic cross-section of the canal is symmetric aboutthe � -axis and its vertex is the origin. The vertex form ofany such parabola is ��� � � � � � � , for some
�� � ; this
is because� � � � � � � � � � � is the vertex and the parabola
opens upward! The dimension information given tells usthat the points
� � � � � and
� � � � � � are on the graph of� � � . Plugging into the expression for
�, we conclude that ��� � � � , so� � � � and
� � � � � � � � � . Finally, if the water is 5 feet deep, we mustsolve the equation:
� � � � � � � , leading to � � � � � � � � � � � . Conclude thesurface of the water is
�� �
feet wide when the water is 5 feet deep.
7.3 Interpreting the Vertex
PSfrag replacements
-axis
-axis
-axis
minimum
value��� �
������
�
����
���
vertexvertex
maximum
value� � �
����
Figure 7.12: The vertex as the extremum of the quadratic function.
If we begin with a quadratic function � � � � � � � � � � � � , we knowthe graph will be a parabola. Graphically, the vertex will correspond toeither the “highest point” or “lowest point” on the graph. If
�� � , the
vertex is the lowest point on the graph; if� � , the vertex is the highest
point on the graph. The maximum or minimum value of the function isthe second coordinate of the vertex and the value of the variable forwhich this extreme value is achieved is the first coordinate of the vertex.As we know, it is easy to read off the vertex coordinates when a quadraticfunction is written in vertex form. If instead we are given a quadraticfunction � � � � � � � � , we can use the technique of completing thesquare and arrive at a formula for the coordinates of the vertex in termsof
�, � , and � . We summarize this below and label the two situations
(upward or downward opening parabola) in the Figure 7.12. Keep in

100 CHAPTER 7. QUADRATIC MODELING
mind, it is always possible to obtain this formula by simply completingthe square.
Important Fact 7.3.1. In applications involving a quadratic function� � � � � � � � � � �
the vertex has coordinates � � � �
��� � � � �
��� � � . The second coordinate of the
vertex will detect the maximum or minimum value of� � � ; this is often a
key step in problem solving.
Example 7.3.2. Discuss the graph of the quadratic function � � � � � �� � � � �
�.
−4 −2 2 4 8
−80
−60
−40
6
−20
PSfrag replacements
-axis
-axis
-axis
Figure 7.13: Sketching � �� � � � .
Solution. We need to place the equation � � � � � in vertexform. We can simply compute
� � � � , � � �
��� � � �� and
� � � � � �� � � � �
� , using Fact 7.3.1:� � � � � � � � �
�
� � �� �
�� � �
�� � �
� �
This means that the graph of� � � is a parabola opening
downward with vertex � � �� � � �
� � and axis � � �� ; see Fig-ure 7.13.
7.4 Quadratic Modeling ProblemsThe real importance of quadratic functions stems from the connectionwith motion problems. Imagine one of the three kicked ball scenarios inFigure 7.1 and impose a coordinate system with the kicker located at theorigin. We can study the motion of the ball in two ways:
� Regard time � as the important variable and try to find a function�� ��� which describes the height of the ball � seconds after the ball
is kicked; this would just be the � -coordinate of the ball at time � .The function �
� ��� is a quadratic function. If we had this function inhand, we could determine when the ball hits the ground by solvingthe equation � � � � ��� , but we would not be able to determine wherethe ball hits the ground.
� A second approach is to forget about the time variable and simplytry to find a function � � � � � whose graph models the exact path ofthe ball. In particular, we could find where the ball hits the groundby solving � � � � � , but we would not be able to determine when theball hits the ground.

7.4. QUADRATIC MODELING PROBLEMS 101
In Chapter 22, we will see these two viewpoints are very closely related.For now, it is most important to obtain some familiarity with the sort ofmotion problems we are interested in solving using quadratic functions.PSfrag replacements
-axis
-axis
-axispath of kicked ball
ground level
cliff
(a) What it looks likephysically.
−2 1 2 3 5
−100
−50
50
4−1
PSfrag replacements
-axis
-axis
-axis
(b) What it looks likegraphically.
Figure 7.14: Different viewsof the ball’s trajectory.
Example 7.4.1. Figure 7.14(a) shows a ball is located onthe edge of a cliff. The ball is kicked and its height (in feet)above the level ground is given by the function � � � ��� �� ��� � � � ��� � � � , where � represents seconds elapsed afterkicking the ball. What is the maximum height of the balland when is this height achieved? When does the ball hitthe ground? How high is the cliff?
Solution. The function �� ��� is a quadratic function with
a negative leading coefficient, so its graph in the � -coordinate system will be a downward opening parabola.We use a graphing device to get the picture in Fig-ure 7.14(b).
The vertex is the highest point on the graph, whichcan be found by writing �
� ��� in standard form usingFact 7.3.1:
�� ��� � � ��� � � � ��� � � �
� � � �� �
� ��� ��� �
The vertex of the graph of �� ��� is � �� � ��� � , so the maximum
height of the ball above the level ground is 86 feet, occur-ing at time � � �� .
The ball hits the ground when its height above the ground is zero;using the quadratic formula:
�� ��� � � ��� � � � ��� � � �
� �� � �
�� � � � � � � �
� � � � � ��� � �� �� � � � sec or � � � � � sec
Conclude the ball hits the ground after 3.818 seconds. Finally, the heightof the cliff is the height of the ball zero seconds after release; i.e., �
� � � � � �feet is the height of the cliff.

102 CHAPTER 7. QUADRATIC MODELING
Here are two items to consider carefully:
1. The graph of� ��� � is NOT the path followed by the ball! Finding the
actual path of the ball is not possible unless additional informationis given. Can you see why?
2. The function� ��� � is defined for all
�; however, in the context of the
problem, there is no physical meaning when�����
.
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis
The next example illustrates how we must be very careful to link thequestion being asked with an appropriate function.
Example 7.4.2. A hot air balloon takes off from the edge of a mountainlake. Impose a coordinate system as pictured in Figure 7.15 and assumethat the path of the balloon follows the graph of � � � � � � �
�� � � � � � .The land rises at a constant incline from the lake at the rate of 2 vertical
feet for each 20 horizontal feet. What is the maximum height of the balloonabove lake level? What is the maximum height of the balloon above groundlevel? Where does the balloon land on the ground? Where is the balloon50 feet above the ground?
100
200
500 1000
PSfrag replacements
-axis
-axis
-axis
height above lake (ft)
lake
balloon
balloon path
(ft)
Figure 7.15: Visualizing.
Solution. In the coordinate system indicated, the origin isthe takeoff point and the graph of ��� � � � is the path ofthe balloon. Since
� � � is a quadratic function with a neg-ative leading coefficient, its graph will be a parabola whichopens downward. The difficulty with this problem is thatat any instant during the balloon’s flight, the “height ofthe balloon above the ground” and the “height of the bal-loon above the lake level” are different! The picture in
Figure 7.16 highlights this difference; consequently, two different func-tions will be needed to study these two different quantities.
200
100
500 1000
PSfrag replacements
-axis
-axis
-axis
��
lake
height of balloon above lake level
height of balloon above ground level
height of ground above lake level
Figure 7.16: The height of the balloon � as a function of � .
The function � � � � � keeps track of the height of the balloon abovelake level at a given location on the horizontal axis. The line � withslope � � �
� � � �� �
passing through the origin models the ground level.

7.4. QUADRATIC MODELING PROBLEMS 103
This says that the function
� � �
keeps track of the height of the ground above lake level at a given location on the horizontal axis.
We can determine the maximum height of the balloon above lake levelby analyzing the parabolic graph of � � � � � . Putting
� � � in vertex form,via Fact 7.3.1,
� � � � � �� � � � � � � � � � � � ��� � �
The vertex of the graph of � � � � � is��� � � � ��� � � . This just tells us that the
maximum height of the balloon above lake level is 200 feet. To find thelanding point, we need to solve the system of equations�
� � ��
� � � � � � � � �� � � �
As usual, plugging the second equation into the first and solving for ,we get
� � � �
� � � � � �� �
� � � � � � � � � � � � � � � � � � � �
PSfrag replacements
-axis
-axis
-axis
takeoff point
vertex (high point above lake)
landing point
horizontal distancefrom launch (feet)
height above lake level (feet)
� � �
� � �
� � � � � �
Figure 7.17: Locating the takeoff and landing points.

104 CHAPTER 7. QUADRATIC MODELING
From the algebra, we see there are two solutions: � � or � � � � ;these correspond to the takeoff and landing points of the balloon, whichare the two places the flight path and ground coincide. (Notice, if we haddivided out from the last equation, we would only get one solution; thetricky point is that we can’t divide by zero!) The balloon lands at theposition where � � � � and to find the � coordinate of this landing pointwe plug � � � � into our function for the balloon height above lake level:� � � � � � � � � � � � � feet. So, the landing point has coordinates
� � � � � � � � � � .Next, we want to study the height of the balloon above the ground. Let
� � �� � be the function which represents the height of the balloon above
the ground when the horizontal coordinate is . We find
�� � �
�height of the balloonabove lake level withhorizontal coordinate �� �
�elevation of groundabove lake level withhorizontal coordinate ��
� � � ��� �� �
��� �� � � � � �
� � �� ��� �(balloon above lake level)
��������minus
� � �� ��� �
(ground above lake level)
� � �� � � � � � � � � � � � �
� � � �Notice that �
� � itself is a NEW quadratic function with a negative leadingcoefficient, so the graph of � � �
� � will be a downward opening parabola.The vertex of this parabola will be
� � � � � � � � � � , so the highest elevationof the balloon above the ground is 153.12 feet.
We can now sketch the graph of �� � and the horizontal line deter-
mined by � � � � in a common coordinate system, as below. Findingwhere the balloon is 50 feet above the ground amounts to finding wherethese two graphs intersect. We need to now solve the system of equations�
� � ��
� � � � � �� �
� � � � � �
Plug the second equation into the first and apply the quadratic for-mula to get � � � � � � � or
� � � � � � This tells us the two possible coor-dinates when the balloon is 50 feet above the ground. In terms of theoriginal coordinate system imposed, the two places where the balloon is50 feet above the ground are
� � � � � � � � � � � � � and� � � � � � � � � � � � � .
7.4.1 How many points determine a parabola?We all recall from elementary geometry that two distinct points in theplane will uniquely determine a line; in fact, we used this to derive equa-

7.4. QUADRATIC MODELING PROBLEMS 105
PSfrag replacements
-axis
-axis
-axis
graph of height above ground function
vertex (high point above ground)
line � � �places where � feet above ground
� � �
� � � � � �
Figure 7.18: Finding heights above the ground.
tions for lines in the plane. We could then ask if there is a similar char-acterization of parabolas.
Important Fact 7.4.3. Let � � � � � � � � , � � � � � � � � and� � � � � � � � be
three distinct non-collinear points in the plane such that the -coordinatesare all different. Then there exists a unique standard parabola passingthrough these three points. This parabola is the graph of a quadratic func-tion � � � � � � � � � � �� � and we can find these coefficients by simultane-ously solving the system of three equations and three unknowns obtainedby assuming � � � and
�are points on the graph of � � � � � :������ �����
� � � � � � � � � � �� �� � � � � � � � �� �� � � � � � � � � �
� ���������
��
Example 7.4.4. Assume the value of a particular house in Seattle hasincreased in value according to a quadratic function � � �
� � , where theunits of � are in dollars and represents the number of years the propertyhas been owned. Suppose the house was purchased on January 1, 1970and valued at $50,000. In 1980, the value of the house on January 1was $80,000. Finally, on January 1, 1990 the value was $200,000. Findthe value function �
� � , determine the value on January 1, 1996 and findwhen the house will be valued at $1,000,000.
Solution. The goal is to explicitly find the value of the function ��� �� � .

106 CHAPTER 7. QUADRATIC MODELING
We are going to work in a � -coordinate system in which the first co-ordinate of any point represents time and the second coordinate repre-sents value. We need to decide what kind of units will be used. The -variable, which represents time, will denote the number of years thehouse is owned. For the � -variable, which represents value, we coulduse dollars. But, instead, we will follow a typical practice in real estateand use the units of K, where K = $ � � � � � For example, a house valuedat $ � � ��� � � would be worth � � � � K. These will be the units we use, whichessentially saves us from drowning in a sea of zeros!
We are given three pieces of information about the value of a particularhouse. This leads to three points in our coordinate system: � � � � � � � � ,
� � � � � � � � and
� � � ��� � ��� � � . If we plot these points, they do not lieon a common line, so we know there is a unique quadratic function
�� � � � � � � � � whose graph (which will be a parabola) passes through
these three points. In order to find the coefficients�, � , and � , we need
to solve the system of equations:
�� � � � � � � � � � � � �� � � � � � � � � � � � � � �� � ��� � � � � � ��� � � � � ��� �
� �� �
which is equivalent to the system�� � � � � � � � � � � � � � � � ��� � � � ��� � � � � ��� �
� �� �
Plugging � � � � into the second two equations gives the system� � � � � � � � ���� � � � ��� � �
� � � (7.1)
Solve the first equation for�, obtaining
� � � � � � ��
� � �, then plug this into
the second equation to get:�� �
� ��� � � � � � � ��� � �
� � ����
�� � � ��� � �
� �� � �
� �Now, plug � � � �� into the first equation of Equation 7.1 to get � � � � � � � � � � � �� ; i.e.,
� � �
� � � We conclude that
� � �� � �
����
�� � �
� � �keeping in mind the units here are � .

7.5. WHAT’S NEEDED TO BUILD A QUADRATIC MODEL? 107
To find the value of the house on January 1, 1996, we simply note thisis after ����� years of ownership. Plugging in, we get � � �
� ��� � � �
� �� ��� � � �� � ��� � � � � � � � � i.e., the value of the house is $ � � ��� � . To find when
the house will be worth $1,000,000, we note that $ ��� � � � � � � � ��� � � K andneed to solve the equation
� � � � �� � �
����
�� � �
� �� �
����
�� � �
� � � �By the quadratic formula,
� �� � � � � �� � � � � � �
� � � � � � � � �� � �
� � �� �
��
� � � � � �
� � ��� � �� � or �
� ��� �
Because represents time, we can ignore the negative solution and sothe value of the house will be $ ��� � � � � � � after approximately
� � �� � yearsof ownership.
7.5 What’s Needed to Build a Quadratic Model?Back in Fact 4.7.1 on page 50, we highlighted the information required todetermine a linear model. We now describe the quadratic model analog.
Important Facts 7.5.1. A quadratic model is completely determined by:
1. Three distinct non-collinear points, or
2. The vertex and one other point on the graph.
The first approach is just Fact 7.4.3. The second approach is basedon the vertex form of a quadratic function. The idea is that we know anyquadratic function
� � � has the form� � � � � � � � � � � � �
where� � � � � is the vertex. If we are given
�and
�, together with another
point� � � � � � on the graph, then plugging in gives this equation:
� � � � � � � � � � � � �
The only unknown in this equation is�, which we can solve for using
algebra. A couple of the exercises will depend upon these observations.

108 CHAPTER 7. QUADRATIC MODELING
7.6 ExercisesProblem 7.1. A toy rocket is launched froma position 100 feet from the centerline of ahouse; see picture below. The highest point onthe house roof is 35 feet above the ground andthe roof slope is � $� . The sides of the houseare 10 feet high. Assume coordinates are im-posed so that the � -axis coincides with groundlevel and the centerline through the house in-tersects the ground at the origin.
10 feet35 feet
centerline through house
Rocket path is a parabola
100 feet
ground level
PSfrag replacements
-axis-axis
-axis
The path of the rocket is always the graph ofa quadratic function, but the actual path willdepend on the type and amount of fuel used.Answer these questions:
(a) If the path is given by the graph of� � � �
�� � � � ��� � , determine where the
rocket lands, its maximum height abovethe ground and whether the rocketstrikes the house. If the rocket strikesthe house, determine exactly where ithits the house.
(b) If the path is given by the graph of� � � �
�� � � � ������� , determine where the
rocket lands, its maximum height abovethe ground and whether the rocketstrikes the house. If the rocket strikesthe house, determine exactly where ithits the house.
(c) If the path is given by the graphof � � � �
�� � � � � ��� � � ��������� , determine
where the rocket lands, its maximumheight above the ground and whetherthe rocket strikes the house. If therocket strikes the house, determine ex-actly where it hits the house.
(d) If the path is given by the graphof � � � �� � � � � � ��"� � � "������� , determine
where the rocket lands, its maximumheight above the ground and whetherthe rocket strikes the house. If therocket strikes the house, determine ex-actly where it hits the house.
Problem 7.2. Write the following quadraticfunctions in vertex form, find the vertex, theaxis of symmetry and sketch a rough graph.
(a)� � ��� ��� � � � ��! � ��� � .
(b)� � ��� � � � � � �� � � � .
(c)� � � � � � � � $
� � � ��� .
(d)� � ��� ��� � � .
(e)� � � � � �
���� ��� .
Problem 7.3. The initial price of buzz.comstock is $10 per share. After 20 days the stockprice is $20 per share and after 40 days theprice is $25 per share. Assume the price ofthe stock is modeled by a quadratic function.
(a) Find the quadratic function � � ��� givingthe stock price after � days. If you buy1000 shares after 30 days, what is thecost?
(b) To maximize profit, when should you sellshares? How much will the profit be onyour 1000 shares purchased in (a)?
(c) When will the stock become worthless?
Problem 7.4. Sketch the graph of� � � � � � � � � . Label the coordinates of the� and � intercepts of the graph. In thesame coordinate system, sketch the graph of� �
�� � � � � � �
�, give the multipart rule and
label the � and � intercepts of the graph.
Problem 7.5. A hot air balloon takes off fromthe edge of a plateau. Impose a coordinate sys-tem as pictured below and assume that thepath the balloon follows is the graph of thequadratic function � � � � ��� � � �
�� � � � � � � � � .
The land drops at a constant incline from theplateau at the rate of 1 vertical foot for each5 horizontal feet. Answer the following ques-tions:

7.6. EXERCISES 109
takeoffhorizontal distancefrom launch (feet)
ground incline
height above plateau (feet)
balloon
PSfrag replacements
-axis-axis
-axis
(a) What is the maximum height of the bal-loon above plateau level?
(b) What is the maximum height of the bal-loon above ground level?
(c) Where does the balloon land on theground?
(d) Where is the balloon 50 feet above theground?
Problem 7.6. (a) Suppose� � ��� � � � � � � .
Does the point � ��� ��� lie on the graph of� � � � ��� ? Why or why not?
(b) If is a constant, where does the line� � � � �� intersect the graph of � �� � � � � ?
(c) If � is a constant, where does theline � � � ��� � intersect the graph of� � ��� � � � � � � ?
(d) Where does the graph of � � � � � � � � � � ���intersect the graph of � � � � � � � ��� ?
Problem 7.7. (Magical Marble Toss) A marbleis thrown into the air from a ledge so that itstarts � � ft above ground. The path of the mar-ble is given by the graph of
� � � ���� �
� ��� � � � �
in the pictured coordinate system.
white
yellow
blue
green18 ft
PSfrag replacements
-axis-axis
-axis
Suspended magically in the air are bowls ofpaint. Each bowl is � ft wide at its mouth. Ifthe marble lands in a bowl, it will become thecolor of the paint in the bowl and magicallypass through the bowl, continuing on its way.The location of each bowl and the color of itspaint is given in the table. The marble startsout clear. What color is the marble when it hitsthe ground?
Paint Bowl Coordinates, Left RimWhite � "� � ���#� �Yellow � � � ! �Blue � � � �� �Green � � ��� ���
Problem 7.8. Dave starts off on a run fromthe IMA. Assume he runs in a straight line forthe first 200 seconds. Here is a picture of thegraph of his velocity � � ��� at time � seconds; wewill use distance units of FEET and time unitsof SECONDS. Here is the actual formula forDave’s velocity:
� � ��� �� � �� �
� ��� ���� ��� � � � � ���
�� � ���&� � � �� � � � � ��� � � ���"���
5
10
15
20
50 100 150 200
ft/secdave’s velocity v(t)
t sec
PSfrag replacements
-axis-axis
-axis
(a) When does Dave have maximum veloc-ity and what is his maximum velocity?What is his “pace” at this time in unitsof “minutes/mile”?
(b) During the first 200 seconds, how muchtime does Dave spend running at aspeed of at least 12 ft/sec?
Problem 7.9. Sylvia has an apple orchard.One season, her 100 trees yielded 140 applesper tree. She wants to increase her productionby adding more trees to the orchard. However,she knows that for every 10 additional treesshe plants, she will lose 4 apples per tree (i.e.,the yield per tree will decrease by 4 apples).How many trees should she have in the or-chard to maximize her production of apples?

110 CHAPTER 7. QUADRATIC MODELING
Problem 7.10. Rosalie is organizing a circusperformance to raise money for a charity. Sheis trying to decide how much to charge for tick-ets. From past experience, she knows that thenumber of people who will attend is a linearfunction of the price per ticket. If she charges5 dollars, 1200 people will attend. If shecharges 7 dollars, 970 people will attend. Howmuch should she charge per ticket to make themost money?
Problem 7.11. A Norman window is a rectan-gle with a semicircle on top. Suppose that theperimeter of a particular Norman window is tobe 24 feet. What should its dimensions be inorder to maximize the area of the window and,therefore, allow in as much light as possible?
Problem 7.12. Jun has 300 meters of fenc-ing to make a rectangular enclosure. She alsowants to use some fencing to split the enclo-sure into two parts with a fence parallel to twoof the sides. What dimensions should the en-closure have to have the maximum possiblearea?
Problem 7.13. Steve likes to entertain friendsat parties with “wire tricks.” Suppose he takesa piece of wire 60 inches long and cuts it intotwo pieces. Steve takes the first piece of wireand bends it into the shape of a perfect circle.He then proceeds to bend the second piece ofwire into the shape of a perfect square. Whereshould Steve cut the wire so that the total areaof the circle and square combined is as smallas possible? What is this minimal area? Whatshould Steve do if he wants the combined areato be as large as possible?
Problem 7.14. In each case, find a quadraticfunction whose graph passes through thegiven points:
(a) � ��� ��� , � ��� ��� and � � �#� ��� .(b) � � ��� ��� , � ��� � ��� and � � � � � .(c) � � � ��� , � � � ��� and � � ��� .(d) � ��� ��� , � ��� ��� and � ��� � � .
Problem 7.15. The market for summer moviesis intense. The movie studios use every formof media to promote their movies. Each timea movie is mentioned either on TV, in the pa-pers, over the web, or in a magazine articleis considered an advertisement for the movie.Let � � � represent the first day of the sum-mer movie season. For the movie, Rat Race,the maximum number of advertisements, �"��� ,
occurred on the � nd day of the summer sea-
son ( � � � ). On the � th day, the number of
advertisements was only �� .
(a) Develop a mathematical model, � � ��� ,that represents the number of advertise-ments of Rat Race as a function of theday of the summer season, assumingthe function is either zero or a quadraticmodel. (This will be a multipart func-tion.) Specify the time period when thereno advertisements.
(b) Let � � ��� � � � � � ��! � � � � � ��!#��� � �� � ����� ��! � �represents the number of advertise-ments for the movie, Planet of the Apes.Determine when the number of adver-tisements for Rat Race was 100 or morethan the number of advertisements forPlanet of the Apes.
Problem 7.16. If the graph of the quadraticfunction
� � � � � � � ��� � � ��� has its vertex onthe � -axis, what are the possible values of � ?What if
� � � � � � � � ��� � � ��� � � ?
Problem 7.17. For each of the following equa-tions, find the value(s) of the constant � so thatthe equation has exactly one solution, and de-termine the solution for each value.
(a) � � � � � � � � �(b) � � � � � � � � �(c) � � � � � � � �(d) � � � � � ��� � � � � �
Problem 7.18. (a) Solve for �
� � � � � � ��� � � �
(b) Solve for �
� � � � � � � � �
Problem 7.19. (a) What is the maximumvalue of the function
� � ��� � �� � � � ?In a grammatically correct sentence, ex-plain why the maximum is that particu-lar value.
(b) For what values of � , and � does theequation � � � � � � � � � have two distinctsolutions? One solution? No solutions?
(c) Find all solutions to � � � � � � � � � � .(d) Find all solutions to � � � � � � � � � .

Chapter 8
Composition
A new home takes its shape from basic building materials and the skill-ful use of construction tools. Likewise, we can build new functionsfrom known functions through the application of analogous mathemati-cal tools. There are five tools we want to develop: composition, reflection,shifting, dilation, arithmetic. We will handle composition in this section,then discuss the others in the following two sections.
PSfrag replacements
-axis
-axis
-axis
������������� ���� �
� � � � �hours
oxygen rate �� �
(a) Flash at � � � .
PSfrag replacements
-axis
-axis
-axis
������������� ���� �
� � � � �hours
oxygen rate �� �
(b) Flash at � �� .
Figure 8.1: Light flashes.
To set the stage, let’s look at a simple botany experi-ment. Imagine a plant growing under a particular steadylight source. Plants continually give off oxygen gas tothe environment at some rate; common units would beliters/hour. If we leave this plant unbothered, we mea-sure that the plant puts out 1 liter/hour; so, the oxygenoutput is a steady constant rate. However, if we apply aflash of high intensity green light at the time � � andmeasure the oxygen output of the plant, we obtain theplot in Figure 8.1(a).
Using what we know from the previous section onquadratic functions, we can check that a reasonablemodel for the graph is this multipart function
� � ��� (on thedomain � � � ):
� � ��� ��� � if � �� � � � �� � � if � if �
Suppose we want to model the oxygen consumptionwhen a green light pulse occurs at time � � �
(instead oftime � � ), what is the mathematical model? For starters,it is pretty easy to believe that the graph for this new sit-uation will look like the new graph in Figure 8.1(b).
But, can we somehow use the model� � ��� in hand (the known function)
to build the model we want (the new function)? We will return in Exam-
111

112 CHAPTER 8. COMPOSITION
ple 8.2.4 to see the answer is yes; first, we need to develop the tool offunction composition.
8.1 The Formula for a Composition
The basic idea is to start with two functions�
and � and produce a newfunction called their composition. There are two basic steps in this pro-cess and we are going to focus on each separately. The first step is fairlymechanical, though perhaps somewhat unnatural. It involves combiningthe formulas for the functions
�and � together to get a new formula;
we will focus on that step in this subsection. The next step is of varyingcomplexity and involves analyzing how the domains and ranges of
�and �
affect those of the composition; we defer that to the next subsection oncewe have the mechanics down.
PSfrag replacements
-axis
-axis
-axis
�inin
in
out
out
out
the “ � ” function �� � � � � the “
�” function � � � �
� �
“composed” function � � � � � � � � �
��
Figure 8.2: Visualizing a composite function � � � ��� � � � � � ��� � � .Here is a very common occurrence: We are handed a function � � � � � ,
which means given an value, the rule� � � produces a new � value. In
addition, it may happen that the variable is itself related to a thirdvariable � by some different function equation �� �
� � � . Given � , therule �
� � � will produce a value of ; from this we can use the rule� � �
to produce a � value. In other words, we can regard � as a functiondepending on the new independent variable � . It is important to knowthe mechanics of working with this kind of setup. Abstractly, we havejust described a situation where we take two functions and build a new

8.1. THE FORMULA FOR A COMPOSITION 113
function which “composes” the original ones together; schematically thesituation looks like this:
Example 8.1.1. A pebble is tossed into a pond. The radius of the first cir-cular ripple is measured to increase at the constant rate of 2.3 ft/sec. Whatis the area enclosed by the leading ripple after 6 seconds have elapsed?How much time must elapse so that the area enclosed by the leading rippleis 300 square feet?
PSfrag replacements
-axis
-axis
-axis
leading ripple after � seconds
leading ripple after�
seconds
leading ripple after � second
� � � �Figure 8.3: Concentric rip-
ples.
Solution. We know that an object tossed into a pondwill generate a series of concentric ripples, which growsteadily larger. We are asked questions that relate thearea of the circular region bounded by the leading rippleand time elapsed.
Let � denote the radius of the leading ripple after � sec-onds; units of feet. The area � of a disc bounded by aleading ripple will be � � �
� � � � � � � � This exhibits � as afunction in the variable � . However, the radius is changing with respectto time:
� ��� � ��� � radius after � seconds ��� �� feet
sec � � seconds ��� �� � feet �
So, � � � � ��� is a function of � . In the expression � � �� � � , replace “ � ” by
“ � � ��� � ” then
� ��� � � �� ��� � � �� � � �� � �
The new function� � ��� � �
� � � ��� � gives a precise relationship between areaand time.
To answer our first question,� � � � � � � � �� feet
�is the area of the region
bounded by the leading ripple after 6 seconds. On the other hand, if� � ��� � �� � ft�;, �� � � �
� � � ��� � , so � � � �� ��� ��� � � � � � � � � � � � . Since � repre-sents time, only the positive solution � �
�� � � seconds makes sense.
We can formalize the key idea used in solving this problem, which isfamiliar from previous courses. Suppose that
� � � � �and that additionally the independent variable is itself a function of adifferent independent variable � ; i.e.,
� �� ��� �
Then we can replace every occurrence of “ ” in� � � by the expression
“ �� ��� � ” thereby obtaining � as a function in the independent variable � .
We usually denote this new function of � :� � � � � � ��� � �

114 CHAPTER 8. COMPOSITION
We refer to� ��� ��� � as the composition of
�and � or the composite function.
The process of forming the composition of two functions is a mechan-ical procedure. If you are handed the actual formulas for � � � � � and � �
� ��� , then Procedure 8.1.2 is what you need.
Important Procedure 8.1.2. To obtain the formula for� ��� ��� � , replace ev-
ery occurrence of “ ” in� � � by the expression “ �
� ��� � ”Here are some examples of how to do this:
Examples 8.1.3. Use the composition procedure in each of these cases.
(i) If � � � � � � � and ���� ��� � � � , then
� ��� ��� � � � � � ��� ��� .
(ii) If � � � �and � �
� ��� ��, then
� ��� ��� � � � �
�� � � � � � �
�
(iii) If � � � � � � � � and � �� ��� ��� � � , then
� ��� ��� � � � � � � � �
� � � � � � � � �
�� � �
�� � � �
(iv) If � � � � � � � � ��� � � � and � �
� ��� ��� � � � , then
� ��� ��� � � � � � � � � �
� � � �� � � � � � � �
� � � � � � � ��� � � � �(v) If � � � � � � � and � �
� ��� � � � �, then
� ��� ��� � � � � � � � �
� � � � � � �� � � � � � �
�� �
�
It is natural to ask: What good is this whole business about composi-tions? One way to think of it is that we can use composite functions tobreak complicated functions into simpler parts. For example,
� � � � � � � �
can be written as the composition� ��� � � , where � � � � � � � � �
and� �
�� � �� � � . Each of the functions
�and � is “simpler” than the original
�,
which can help when studying�.
Examples 8.1.4. Here we use composite functions to “simplify” a givenfunction.

8.1. THE FORMULA FOR A COMPOSITION 115
(i) The function � � ��� � � � � � � can be written as a composition � � � � � � � � ,
where � � � � � � � �� � � � and� ���
� � �� � .
(ii) The upper semicircle of radius � centered at (1,2) is the graph of thefunction � ��� �
�� � � � � . This function can be written as a com-
position � � � � � � � � , where � � � � � � ��� � � �� � �
and� � �
� � �� � .
8.1.1 Some notational confusionIn our discussion above, we have used different letters to represent thedomain variables of two functions we are composing. Typically, we havebeen writing: If � � � � � and � �
� ��� , then � � � � � � ��� � is the composition.This illustrates that the three variables � , , and � can all be of differenttypes. For example, � might represent time, could be speed and � couldbe distance.
If we are given two functions that involve the same independent vari-able, like
� � � � � and �� � ��� �� , then we can still form a new function
� ��� � � by following the same prescription as in Procedure 8.1.2:
Important Procedure 8.1.5. To obtain the formula for� ��� � � , replace
every occurrence of “ ” in� � � by the expression “ �
� � .”For our example, this gives us:� ��� � � � � � � � � � � � � � � �
Here are three other examples:
� If� � � � � , � � � � � � � , then
� ��� � � � � � � � .
� If� � � � �
�, �
� � ��� � , then� ��� � � � ��
� � �.
� If� � � � � , � � � � � � , then
� ��� � � � � �
� � �� � .

116 CHAPTER 8. COMPOSITION
PSfrag replacements
� -axis
� -axis
-axis
-axis-axis
� �
���� ��� �� �� �
Figure 8.4: Sketching com-posite functions.
Example 8.1.6. Let� � � �� � , � � � � � and
� � � �� � .Find the formulas for
� ��� � � , �
� � � � � , � � � � � � and� � � � � � .
Discuss the relationship between the graphs of these fourfunctions.
Solution. If we apply Procedure 8.1.5, we obtain the com-position formulas. The four graphs are given on the do-main � , together with the graph of
� � � � � .� ��� � � � � � � � � � � � �
�� � � � � � �
� � � �� � � � � � � � � � � � � � � � � � �� � � � � � � � � � � �� � � �
We can identify each graph by looking at its vertex:
�� � � has vertex (0,0)
�� ��� � � has vertex (-1,0)
� �� � � � � has vertex (0,1)
�� � � � � � has vertex (1,0)
�� � � � � � has vertex (0,-1)
Horizontal or vertical shifting of the graph of� � � �� � gives the other four
graphs: See Figure 8.4.
8.2 Domain, Range, etc. for a CompositionA function is a “package” consisting of a rule, a domain of allowed inputvalues, and a range of output values. When we start to compose func-tions, we sometimes need to worry about how the domains and rangesof the composing functions affect the composed function. First off, whenyou form the composition
� ��� � � of
� � � and �� � , the range values for
�� � must lie within the domain values for
� � � . This may require thatyou modify the range values of �
� � by changing its domain. The domainvalues for
� ��� � � will be the domain values for �
� � .

8.2. DOMAIN, RANGE, ETC. FOR A COMPOSITION 117
PSfrag replacements
-axis
-axis
-axis
domain �
inin outout
the “ � ” function
range of �
domain of�
the “�” function
range of� � � � � � �
Figure 8.5: What is the domain and range of a composite function?
In practical terms, here is how one deals with the domain issues for acomposition. This is a refinement of Procedure 8.1.5 on page 115.
Important Procedure 8.2.1. To obtain the formula for� ��� � � , replace
every occurrence of “ ” in� � � by the expression “ �
� � .” In addition, ifthere is a condition on the domain of
�that involves , then replace every
occurrence of “ ” in that condition by the expression “ �� � .”
The next example illustrates how to use this principle.
Example 8.2.2. Start with the function � � � � � � � on the domain� . Find the rule and domain of � � � � � � � � , where �
� � � � .
Solution. We can apply the first statement in Procedure 8.2.1 to find therule for � � � � � � � � :
� � � ��� � �
� � � � � � � � � �� � � � � �
To find the domain of � � � � � � � � , we apply the second statement inProcedure 8.2.1; this will require that we solve an inequality equation:
� �� �
� � � �
The conclusion is that � � � � � � � � �� � � � � on the domain � � .Example 8.2.3. Let � � � � � � � � �
,� � �
� � � � . What is the largestpossible domain so that the composition
� ��� � � makes sense?

118 CHAPTER 8. COMPOSITIONPSfrag replacements
-axis
-axis
-axis �
range
domain
� � � � � �
�
(a) � � � �
.
PSfrag replacements
-axis
-axis
-axis
�
desired range
�� �
required domain
� � � � � � � ��� �
(b)�
� � � � .
Figure 8.6: Finding the largest domain for� � � � ��� � .
Solution. The largest possible domain for � � � � � � will consist of all non-negative real numbers; this is also the range of the function
� � � � : SeeFigure 8.6(a).
To find the largest domain for the composition, we try to find a domainof -values so that the range of
� � �� � is the domain of � � � � � � . So, in
this case, we want the range of �� � to be all non-negative real numbers,
denoted � �. We graph
� � �� � in the � -plane, mark the desired range
� �on the vertical
�-axis, then determine which -values would lead to
points on the graph with second coordinates in this zone. We find thatthe domain of all -values greater or equal to � (denoted � ) leadsto the desired range. In summary, the composition ��� � � � � � � � � � is defined on the domain of -values � .
Let’s return to the botany experiment that opened this section and seehow composition of functions can be applied to the situation. Recall thatplants continually give off oxygen gas to the environment at some rate;common units would be liters/hour.
Example 8.2.4. A plant is growing under a particular steady light source.If we apply a flash of high intensity green light at the time � � andmeasure the oxygen output of the plant, we obtain the plot below and themathematical model
� � ��� .� � ��� �
�� � if � �� � � � �� � � if � if �
Now, suppose instead we apply the flash of high intensity green light atthe time � � �
. Verify that the mathematical model for this experiment isgiven by
� ��� ��� � , where �
� ��� � � ��.

8.2. DOMAIN, RANGE, ETC. FOR A COMPOSITION 119
PSfrag replacements
-axis
-axis
-axis
�� � �
� � �� � �� � �� � � �
� �
oxygen rate �� �
hours
(a) Flash at � � � .
PSfrag replacements
-axis
-axis
-axis
�� � �
� � �� � �� � �� � � �
� �
oxygen rate �� �
hours
(b) Flash at � �� .
Figure 8.7: Applying light attime � .
Solution. Our expectation is that the plot for this new ex-periment will have the “parabolic dip” shifted over to oc-cur starting at time � � �
instead of at time � � . In otherwords, we expect the graph in Figure 8.7(b).
Our job is to verify that this graph is obtained from thefunction
� ��� ��� � , where �
� ����� � ��. This is a new terrain
for us, since we need to look at a composition involving amultipart function. Here is how to proceed: When we arecalculating a composition involving a multipart function,we need to look at each of the parts separately, so therewill be three cases to consider:
First part:� � ����� when � . To get the formula for
� ��� ��� � , we now appeal to Procedure 8.2.1 and just replace
every occurrence of � in� � ��� by �
� ��� . That gives us thisNEW domain condition and function equation:
� ��� ��� � � � � � �
�� � when � �
�
� when � ��
Second part:� � ��� � �� � � � �� � � when � . We now
appeal to Procedure 8.2.1 and just replace every occur-rence of � in this function by �
� ��� . That gives us this NEWdomain condition and function equation:
� ��� ��� � � � � � �
�� � � � � � � � � � � � � � � � � when � �
�
� � � � � ��� �� when
� � � �Third part:
� � ��� � when � . We now appeal to Procedure 8.2.1 andjust replace every occurrence of � in this function by �
� ��� . That gives usthis NEW domain condition and function equation:
� ��� ��� � � � � � �
�� � when � �
�
� when� � �
The multipart rule for this composition can now be written down andusing a graphing device you can verify its graph is the model for ourexperiment.
� ��� ��� � �
�� � if � �� � � � � ��� � � �� if
� � � if
� �

120 CHAPTER 8. COMPOSITION
8.3 ExercisesProblem 8.1. The volume
�of a sphere of ra-
dius � is given by the formula� � � � � �
$ � � $ . Aballoon in the shape of a sphere is being in-flated with gas. Assume that the radius of theballoon is increasing at the constant rate of �inches per second, and is zero when � � � .
(a) Find a formula for the volume�
of theballoon as a function of time � .
(b) Determine the volume of the balloon af-ter seconds.
(c) Starting with an empty balloon, supposethat the balloon will burst when its vol-ume is ����� ����� cubic inches. At what timewill the balloon burst?
(d) Find a formula for the surface area � ofthe balloon as a function of time � ; recallthe surface area formula for a sphere ofradius � is ��� � � � � � � � .
(e) Determine the surface area of the bal-loon after ! seconds.
(f) What will be the surface area of the bal-loon when it bursts?
Problem 8.2. For this problem,� � ��� � � � � ,� � ��� � � � � � and
� � ��� � ��
�.
(a) Compute the multipart rules for� � � � ��� �
and� � � � ��� � and sketch their graphs.
(b) Compute the multipart rules for� � � � ��� �
and � � � � ��� � and sketch their graphs.
(c) Compute the multipart rule for� � � � ��� � ���
and sketch the graph.
Problem 8.3. Write each of the following func-tions as a composition of two simpler func-tions: (There is more than one correct answer.)
(a) � ��� � � ����� �.
(b) � � ����� � � .
(c) � ��� � � � � � �� � � � � � � � �
� � � � � � � ��� .
(d) � � �� � � $ .(e) � � � � � � � .
(f) � ��� � � ��� � � � ��� � .
Problem 8.4. (a) Let� � ��� be a linear func-
tion,� � ��� � � � � for constants � and .
Show that� � � � ��� � is a linear function.
(b) Find a function � � ��� such that � � � � ��� � �! � � � .
Problem 8.5. Let� � ��� � �
� � � � .
(a) Sketch the graphs of� � ��� � � � � � ��� � � � � � � � � ��� � �
on the interval � � � � � ��� .(b) Your graphs should all intersect at the
point (6,6). The value � � ! is calleda fixed point of the function
� � � � since� � ! � � ! ; that is, 6 is fixed - it doesn’tmove when
�is applied to it. Give an ex-
planation for why 6 is a fixed point forany function
� � � � � � � � ��� � � � .(c) Linear functions can have at most one
fixed point. Quadratic functions canhave at most two. Find the fixed pointsof the function � � ��� � � � � � .
(d) Give a quadratic function whose fixedpoints are � � � � and � � � .
Problem 8.6. A car leaves Seattle headingeast. The speed of the car in mph after � min-utes is given by the function
� � � � � � � ���� � � �
(a) Find a function � � � ��� � that convertsseconds � into minutes � . Write outthe formula for the new function � � � ����� � ;what does this function calculate?
(b) Find a function � � � � � � that convertshours
�into minutes � . Write out the
formula for the new function � � � � � � � ;what does this function calculate?
(c) Find a function�
� � ��� � that convertsmph � into ft/sec
�
. Write out the for-mula for the new function � � � � � � ; whatdoes this function calculate?
Problem 8.7. A contractor has just built a re-taining wall to hold back a sloping hillside. Tomonitor the movement of the slope the con-tractor places marker posts at the positionsindicated in the picture; all dimensions aretaken in units of meters.

8.3. EXERCISES 121
5
2
wall
1
3
markers hillside profileat time wallis constructed
3 3
PSfrag replacements
-axis-axis
-axis
(a) Find a function � � � � ��� that models theprofile of the hillside.
(b) Assume that the hillside moves as timegoes by and the profile is modeled bya function � � � ��� after years. If �� , then � � � ��� � � � ��� . After one year,the profile is modeled by the function� � � ��� � � � � � ��� � . After two years, the pro-file is modeled by the function � � � ��� �� � � � � � ��� � � . After years, it is modeledby the function � � � ��� � � � � � � � � � ���� � � � � ,where we have composed the originalfunction � � times. Find a formulafor � � � ��� that does not involve compo-sitions. (Hint: To do this, start by writ-ing out the formulas for � ��� � � � � � . Youwill see a pattern developing. To get thegeneral formula, the following fact willbe useful: Given a real number � � � � �and a positive integer � ,
��� � � � � � � $ � � � � � ��� � ��� � � �
� ��
� � �
Your final formula for � � � ��� will involveboth � and .)
(c) Sketch the graphs of � � � ��� for�� ��� ��� � � � � � � in the same coordinatesystem.
(d) What is happening to the marker posts?
(e) Estimate when the hillside will start tospill over the retaining wall.
Problem 8.8. Compute the compositions� � � � ��� � , � � � � � � � and � � � � ��� � in each case:
(a)� � ��� � � � � � � ��� � � � � .
(b)� � ��� � ��� � � � � ��� � �
� .
(c)� � ��� � � � � � � � � ��� � �
� � � � ��� .(d)� � ��� � ! � � � � � � ��� � � � � .
(e)� � ��� � � � $ � � � � � ��� � �
�� � � !
(f)� � ��� ��� � � ��� � � ��� � � $ .
(g)� � ��� � � � � � ��� � � � � � � � � � .
(h)� � ��� � � � � � � ��� � � .
Problem 8.9. Let � � � � � � ��� �
�
� and�
��� � ��� � � � � � . Compute the composition� � � � � � ��� � . Find the largest possible domainof � -values so that the composition � � � � � � � � �is defined.
Problem 8.10. A plant is growing under a par-ticular steady light source. If we apply a flashof high intensity green light at the time � � �and measure the oxygen output of the plant,we are led to the mathematical model
� � ��� .� � ��� � �� � � if � � �
�$ ��� �
�$ ��� � if � � � � �
� if �� �(a) Sketch the graph of � � � � ��� on the do-
main �� � � ��� hours.
(b) Suppose instead we apply the flashof high intensity green light at thetime � ��� . Verify that the mathemati-cal model for this experiment is given by� � � � ��� � , where � � ��� � � � � , on the domain� � � � ��� hours. Sketch the graph mod-eling this experiment and write out themultipart rule.
(c) Suppose you subject the plant to a flashof high intensity green light at the time� � � and at time � � . Sketch thegraph modeling this experiment on thedomain � � � � ��� hours and find thecorresponding multipart function.
Problem 8.11. Suppose you have a function� � � � ��� such that the domain of
� � ��� is� � � � ! and the range of
� � ��� is � � � � �� .(a) What is the domain of
� � � � � � � � � ?
(b) What is the range of� � � � � � � � � ?
(c) What is the domain of � � � ��� � � ?
(d) What is the range of � � � ��� � � ?
(e) Can you find constants � and � so thatthe domain of
� � � � � � � � � is� � �� � ?

122 CHAPTER 8. COMPOSITION
(f) Can you find constants � and�
so thatthe range of �
� � ��� � � is � � � � � ?Problem 8.12. For each of the given functions� � � � � � , simplify the following expression sothat
�is no longer a factor in the denomina-
tor, then calculate the result of setting� � � in
this simplified expression:� � � � � ��� � � � ��
(a)� � ��� � ���� � .
(b)� � ��� ��� � � � ��� � .
(c)� � � � � �
�� � � � .
Problem 8.13. (a) Write the function � � ��� �� ��� � � � ��� � ��! ��� � as a composition� � ��� � � � � � ��� � , where � � ��� � � ��� �� � � � isa quadratic function; find � � � � .
(b) Compute � � � � � � � � � � when� ��� � � �� and� � ��� � ��� � � . Simplify your answer.

Chapter 9
Three Construction Tools
Sometimes the composition of two functions can be understood by graph-ical manipulation. When we discussed quadratic functions and parabo-las in the previous section, certain key graphical manuevers were laidout. In this section, we extend those graphical techniques to generalfunction graphs.
9.1 A Low-tech Exercise PSfrag replacements
-axis
-axis
-axis � � � �� �
Figure 9.1: Start with somecurve.
This section is all about building new functions from oneswe already have in hand. This can be approached symbol-ically or graphically. Let’s begin with a simple hands-onexercise involving the curve in Figure 9.1.
By the vertical line test, we know this represents thegraph of a function � � � � � . With this picture and a pieceof bendable wire we can build an INFINITE number of newfunctions from the original function. Begin by making a“model” of this graph by bending a piece of wire to the exact shape ofthe graph and place it right on top of the curve. The wire model can bemanipulated in a variety of ways: slide the model back and forth horizon-tally, up and down vertically, expand or compress the model horizontallyor vertically.
Another way to build new curves from old ones is to exploit the built insymmetry of the � -coordinate system. For example, imagine reflectingthe graph of � � � � � across the -axis or the � -axis.
PSfrag replacements
-axis
-axis
-axis
NOT a function graph
rotate
Figure 9.2: Rotating a curve.
In all of the above cases, we moved from the originalwire model of our function graph to a new curve that (bythe vertical line test) is the graph of a new function. Thebig caution in all this is that we are NOT ALLOWED torotate or twist the curve; this kind of maneuver does leadto a new curve, but it may not be the graph of a function:See Figure 9.2.
The pictures in Figure 9.3 highlight most of what we have to say in
123

124 CHAPTER 9. THREE CONSTRUCTION TOOLS
this section; the hard work remaining is a symbolic reinterpretation ofthese graphical operations.
PSfrag replacements
-axis
-axis
-axisleft right
Horizontal shift.
PSfrag replacements
-axis
-axis
-axis
up
down
Vertical shift.
PSfrag replacements
-axis
-axis
-axispull pull
expand horizontally
Horizontal expansion.
PSfrag replacements
-axis
-axis
-axispushpush
compress horizontally
Horizontal compression.
PSfrag replacements
-axis
-axis
-axis
expandvertically
pullpull
Vertical expansion.
PSfrag replacements
-axis
-axis
-axis
push pushcompressvertically
Vertical compression.
PSfrag replacements
-axis
-axis
-axisreflect across
� -axis
Vertical reflection.
PSfrag replacements
-axis
-axis
-axis
reflect across � -axis
Horizontal reflection.
Figure 9.3: Shifting, dilating, and reflecting ��� � � ��� .
9.2 Reflection
In order to illustrate the technique of reflection, we will use a concreteexample:
Function: � � � � � ��� � �Domain: � � � �Range: � � � �
As we know, the graph of � � � � � on the domain � � � is a lineof slope � with � -intercept � , as pictured in Figure 9.4(a). Now, start with

9.2. REFLECTION 125
the function equation ��� � � ��� � � � and replace every occurrence of“� ” by “ � � .” This produces the new equation � � ��� � � ; or, equivalently,
� � � � � � � � � � �
PSfrag replacements
-axis
-axis
-axis
��
� � ����
�� �� ��
�
�� �� -axis
� -axis
(a) Graph of � � ��� ��� � � � .
PSfrag replacements
-axis
-axis
-axis
��
� � ����
�� �� ��
�
�� �� -axis
� -axis
(b) Graph of � � ��� � � � � � � .
PSfrag replacements
-axis
-axis
-axis
��
� � ����
�� �� ��
�
�� �� -axis
� -axis
(c) Graph of � � ��� � � � � � � .
Figure 9.4: Reflecting � �� � � � .
The domain is still � � � , but the range willchange; we obtain the new range by replacing “� ” by “ � � ”in the original range: � � � � � ; so � � � � � � . Thegraph of this function is a DIFFERENT line; this one hasslope � � and � -intercept � � � We contrast these two curvesin Figure 9.4(b), where � � � is graphed as the “dashedline” in the same picture with the original �
� � . Once wedo this, it is easy to see how the graph of � � � is really justthe original line reflected across the -axis.
Next, take the original function equation � � � � � �� ��� and replace every occurrence of “ ” by “ � .” Thisproduces a new equation � ��� � � � � � ; or, equivalently,
� ��� � � � � � � � �The domain must also be checked by replacing “ ” by“ � ” in the original domain condition: � � � � , so� � � � � . It just so happens in this case, the domainis unchanged. This is yet another DIFFERENT line; thisone has slope � � and � -intercept 2. We contrast thesetwo curves in Figure 9.4(c), where � � � is graphed as the“dashed line” in the same picture with the original �
� � .Once we do this, it is easy to see how the graph of � � � isreally just the original curve reflected across the � -axis.
This example illustrates a general principle referred toas the reflection principle.
Important Facts 9.2.1 (Reflection). Let � � � � � be afunction equation.
(i) We can reflect the graph across the -axis and the re-sulting curve is the graph of the new function obtainedby replacing “� ” by “ � � ” in the original equation. Thedomain is the same as the domain for � � � � � . If the range for � � � � �is � � � , then the range of � � � � � � is � � � � . In other words,the reflection across the -axis is the graph of � � � � � � .
(ii) We can reflect the graph across the � -axis and the resulting curve isthe graph of the new function obtained by replacing “ ” by “ � ” in theoriginal equation. The range is the same as the range for � � � � � . Ifthe domain for � � � � � is
� � , then the domain of � � � � � �is
� � � . Using composition notation, the reflection across the� -axis is the graph of � � � � � � .

126 CHAPTER 9. THREE CONSTRUCTION TOOLS
Example 9.2.2. Consider the parallelogram-shaped region � with vertices� � � � � , � � � � � � , � � � � , and� � � � � . Use the reflection principle to find functions
whose graphs bound � .
PSfrag replacements
-axis
-axis
-axis
�
��
�� � � ��� � �� �
� � �� � ���
Region�
� -axis
� -axis� �
Figure 9.5: The region � .
Solution. Here is a picture of the region � : First off, us-ing the two point formula for the equation of a line, wefind that the line � � passing through the points � � � � � � �and � � �
� � � is the graph of the function � � � �� � �
� � � � � By Fact 9.2.1 (i), � � is the graph of the equa-tion � � � � � � � , which we can write as the function� � � � � � ��� � � � By Fact 9.2.1 (ii) applied to � � , the line� � is the graph of the function � � � � � � � � � � � � Finally,by Fact 9.2.1 (i) applied to � � , the line � � is the graph of theequation � � � � � � � , which we can write as the function� � � � � � ��� � � �
PSfrag replacements
-axis
-axis
-axis
� � � �� � �
� -axis
� -axis� ���
� �� � � � �
� �
� � � �� �
Figure 9.6: Reflecting thesemicircle.
Figure 9.6 illustrates the fact that we need to becareful about the domain of the original function whenusing the reflection principle. For example, consider� � � � � � � �� � � � � . The largest possible domain of -values is � �
�and the graph is an upper semicircle
of radius centered at the point� � � .
Reflection across the -axis gives the graph of� � � �� � � � � � on the same domain; reflectionacross the � -axis gives the graph of � � � �� � � � �on the new domain �
� � � .
9.3 Shifting
PSfrag replacements
-axis
-axis
-axis
��� ��
�
��� �
� � ��
�
�� � � �
� -axis
� -axis
Figure 9.7: Graph of � ��� � � � .
Let’s start out with the function � � � � � � � �� � � which
has a largest possible domain � � � . From Chap-ter 6, the graph of this equation is an upper semicircleof radius 2 centered at the origin
� � � � � . Sliding the graphback and forth horizontally or vertically (or both), neverrotating or twisting, we are led to the “dashed curves” be-low (contrasted with the original graph which is plottedwith a solid curve). This describes some shifted curves ona pictorial level, but what are the underlying equations?
For this example, we can use the fact that all of the shifted curves arestill semicircles and Chapter 6 tells us how to find their equations.
The lower right-hand dashed semicircle is of radius 2 and is centeredat
� � � � , so the corresponding equation must be � � �� � � � � . The
upper left-hand dashed semicircle is of radius 2 and centered at� � � � , so
the corresponding equation must be � � � � �� � . The upper right-hand

9.3. SHIFTING 127
dashed semicircle is of radius � and centered at� � � , so the correspond-
ing equation must be � � � �� � � � � .
PSfrag replacements
-axis
-axis
-axis
�
��
��
��
���
� �Figure 9.8: Shifting the up-
per semicircle.
Keeping this same example, we can continue this kindof shifting more generally by thinking about the effect ofmaking the following three replacements in the equation� � � �
� � :
� � �� � � � �
� and � ��� � � � and � � � � �These substitutions lead to three new equations, each
the equation of a semicircle:
� ���� � � � � � � �
�Upper semicircle with radius2 and center
� � � � � .� � � � � � � � and,
��Upper semicircle with radius2 and center
� � � � � .� � � ��
�� � � � � � � �
�Upper semicircle with radius2 and center
� � � � � .
PSfrag replacements
-axis
-axis
-axis
curve shifted
� � �units left
if�
is negative
�negative
originalcurve
� -axis
� -axis
�positive
curve shifted�units right
if�
is positive
Figure 9.9: Potentially con-fusing points.
There are three potentially confusing points with thisexample:
� Be careful with the sign (i.e., � ) of�
and�. In Fig-
ure 9.9, if� � , we horizontally shift the semicircle
unit to the right; whereas, if� � � , we horizon-
tally shift the semicircle � units to the right. But,shifting � unit to the right is the same as shifting unit to the left! In other words, if
�is positive, then
a horizontal shift by�
will move the graph� � �
unitsto the right; if
�is negative, then a horizontal shift
by�
will move the graph� � �
units to the left.
� If�
is positive, then a vertical shift by�
will move the graph� � �
unitsup; if
�is negative, then a vertical shift by
�will move the graph
� � �units down. These conventions insure that the “positivity” of
�and
�match up with “rightward” and “upward” movement of the graph.
� When shifting, the domain of allowed -values may change.
This example illustrates an important general principle referred to asthe shifting principle.
Important Facts 9.3.1 (Shifting). Let � � � � � be a function equation.

128 CHAPTER 9. THREE CONSTRUCTION TOOLS
(i) If we replace “ ” by “ � �” in the original function equation, then
the graph of the resulting new function � � � � � � � is obtained byhorizontally shifting the graph of
� � � by�. If
�is positive, the picture
shifts to the right�
units; if�
is negative, the picture shifts to the left�units. If the domain of
� � � is an interval� � � , then the domain
of� � � � � is
� � � � . The range remains unchanged underhorizontal shifting.
(ii) If we replace “� ” by “� � �” in the original function equation, then
the graph of the resulting new function � � � � � � �is obtained by
vertically shifting the graph of� � � by
�. If
�is positive, the picture
shifts upward�
units; if�
is negative, the picture shifts downward�
units. If the range of� � � is an interval � � � , then the range
of� � � � �
is � � � � � . The domain remains unchanged undervertical shifting.
9.4 Dilation
PSfrag replacements
-axis
-axis
-axis
�� � � �� � �� � � ����
� �� � � � �� � � �� � � � �
�-axis
� -axis� �� �� �
Figure 9.10: Graph of � �� � � � � �� � � � .
To introduce the next graphical principle we will look atthe function
� � � � � � � � �
Using a graphing device, we have produced a plot of thegraph on the domain � � � . Figure 9.10 shows thecurve has a high point � (like a “mountain peak”) and alow point � (like a “valley”). Using a graphing device, wecan determine that the high point is � � �
� �� � (it lies onthe line with equation � � �� ) and the low point is � � � � � � �� � (it lies onthe line with equation line � � � �� ), so the range is � �� � �� . Draw twonew horizontal lines with equations � � � � �� � � . Grab the high point
� on the curve and uniformly pull straight up, so that the high point nowlies on the horizontal line ��� at
� � � . Repeat this process by pulling
� straight downward, so that the low point is now on the line � � � at
� � � � � . We end up with the ”stretched dashed curve” illustrated inFigure 9.11(a). In terms of the original function equation � � �
��� �
, we aresimply describing the graphical effect of multiplying the � -coordinate ofevery point on the curve by the positive number � . In other words, thedashed curve is the graph of � � �
���� �� � � �� � � � � .Next, draw the two horizontal lines with equations � � �� � �� � � �� .Grab the high point � on the curve (in Figure 9.10) and uniformly push
straight down, so that the high point now lies on the horizontal line� � �� at
� � �� � . Repeat this process at the low point � by pushing the
curve straight upward, so that the low point is now on the line � � � ��at� � � � �� � . We end up with the new ”dashed curve” illustrated in Fig-
ure 9.11(b). In terms of the original function equation � � ���� �
, we are

9.4. DILATION 129
simply describing the graphical effect of multiplying the � -coordinate ofevery point on the curve by the positive number �� . In other words, thedashed curve is the graph of � � �� �
��� � �
.
PSfrag replacements
� -axis
� -axis
-axis
�� � � �� � �� � � �
� �� � � � �� � � �� � � � � � � �� �� �� �
(a) Vertical expansion.
������������������������
������������ ������������
������������������������
��������
PSfrag replacements
� -axis
� -axis
-axis
�� � � �� � �� � � �
� �� � � � �� � � �� � � � � � � �� �� �� �
(b) Vertical compression.
��������������������������������
� � � ���������������������������������������
������������������������
PSfrag replacements
� -axis
� -axis
-axis
�� � � �� � �� � � �
� �� � � � �� � � �� � � � � � � �� �� �� �
(c) Many possibilities.
Figure 9.11: Dilating � �� � ��� .
We could repeat this process systematically:� Pick a positive number � .� Draw the two horizontal lines � ��� � �� . If � � , then
the graph of � � �� is parallel and above the graph of� � �� . On the other hand, if � � , then this newline is parallel and below � � �� .
� Uniformly deform the original graph (in Figure 9.10)so that the new curve has it’s high and low pointsjust touching � � �
�� . This will involve verticallystretching or compressing, depending on whether� � or � � , respectively. A number of pos-sibilities are pictured in Figure 9.11(c).
We refer to each new dashed curve as a vertical dilationof the original (solid) curve. This example illustrates animportant principle.
Important Facts 9.4.1 (Vertical dilation). Let � � � be apositive number and � � � � � a function equation.
(i) If we replace “ � ” by “ � � ” in the original equation, thenthe graph of the resulting new equation is obtained byvertical dilation of the graph of ��� � � � . The domainof -values is not affected.
(ii) If � � , then the graph of � � � � � � (i.e., � � �� � � ) is a
vertically stretched version of the original graph.
(iii) If � � , then the graph of � � � � � � (i.e., � ���� � � ) is
a vertically compressed version of the original graph.
If we combine dilation with reflection across the -axis,we can determine the graphical relationship between � �� � � and � � �
� � � , for any constant � . The key observationis that reflection across the -axis corresponds to the case � � � .
Example 9.4.2. Describe the relationship between the graphs of
� � � � � �� � � � � � �� � � � � � � � �� � � � � � and
� � ��� � � � �
� �� � � � � �

130 CHAPTER 9. THREE CONSTRUCTION TOOLS
PSfrag replacements
-axis
-axis
-axis
step 1: start with uppersemicircle
step 2: reflect across
� -axis
step 3: stretch curve from
step 2: to get� � � � � � � �Figure 9.12: Reflecting anddilating a lower semicircle.
Solution. The graph of � � � � � is an upper semicircle ofradius 1 centered at the point
� � ��� � . To obtain the pic-ture of the graph of � � �
�� � � , we first reflect � � � � �
across the -axis; this gives us the graph of � � � � � � .Then, we vertically dilate this picture by a factor of � �
�to get the graph of � � � � � � � , which is the same as thegraph of the equation � � �
�� � � . See Figure 9.12.
Let’s return to the original example � � ���� �
and in-vestigate a different type of dilation where the action istaking place in the horizontal direction (whereas it was in
the vertical direction before). Grab the right-hand end of the graph (inFigure 9.10) and pull to the right, while at the same time pulling the left-hand end to the left. We can quantify this by stipulating that the highpoint � � � � �� � of the original curve moves to the new location � � � �� � andthe low point � � � � � � �� � moves to the new location � � � � � �� � .
������������
PSfrag replacements
� -axis
� -axis
-axis
�� � � �� � �� � � �
� �� � � � �� � � �� � � � � � � �� �� �� �
(a) Stretching.
����������������������������
PSfrag replacements
� -axis
� -axis
-axis
�� � � �� � �� � � �
� �� � � � �� � � �� � � � � � � �� �� �� �
(b) Compressing.
Figure 9.13: Horizontally dilating � � �� � � � .
The result will be somewhat analogous to stretching a spring. By thesame token, we could push the right-hand end to the left and push theleft-hand end to the right, like compressing a spring. We can quantify thisby stipulating that the high point � � � � �� � of the original curve moves tothe new location � �� � �� � and the low point � � � � � � �� � moves to the newlocation � � �� � � �� � . These two situations are indicated in Figure 9.13. Werefer to each of the dashed curves as a horizontal dilation of the original(solid) curve.
The tricky point is to understand what happens on the level of theoriginal equation. In the case of the stretched graph in Figure 9.13(a),you can use a graphing device to verify that this looks like the graphof � � � � ��
� � � � � � � ; in other words, we replaced “ ” by “ � � ” in the originalequation. In the case of the compressed graph in Figure 9.13(b), you canuse a graphing device to verify that this looks like the graph of � � �
�� �� ��� �
;in other words, we replaced “ ” by “ �
� � � ��� ” in the original equation.

9.5. VERTEX FORM AND ORDER OF OPERATIONS 131
The process just described leads to a general principle.
Important Facts 9.4.3 (Horizontal dilation). Let ��� � be a positivenumber and � � � � � a function equation.
(i) If we replace “ ” by “ � � ” in the original function equation, then thegraph of the resulting new function � � � � � � � is obtained by a horizon-tal dilation of the graph of � � � � � . If the domain of
� � � is� � � ,
then the domain of � � � � � � � is� � � � .
(ii) If � � , then the graph of � � � � � � � is a horizontal stretch.
(iii) If � � , then the graph of � � � � � � � is a horizontal compression.
9.5 Vertex Form and Order of Operations
Using the language of function compositions we can clarify our discus-sion in Example 7.1.2. Let’s revisit that example:
Example 9.5.1. The problem is to describe a sequence of geometric ma-neuvers that transform the graph of � �� � into the graph of � � � � � � � � � .Solution. The idea is to rewrite � � � � � � � � � as a composition of � �� �with four other functions, each of which corresponds to a horizontal shift,vertical shift, reflection or dilation. Once we have done this, we canread off the order of geometric operations using the order of composition.Along the way, pay special attention to the exact order in which we willbe composing our functions; this will make a big difference.
To begin with, we can isolate four key numbers in the equation:
Reflect�������� ��������
Dilate by 3
��� �Horizontal shift by
��� ��������� � � � ��������Vertical shift by � � �
We want to use each number to define a new function, then composethese in the correct order. We will also give our starting function � � � aspecific name to make things definite:
� � � � � � � � � � �� � � � � � � � � �
�� � � �

132 CHAPTER 9. THREE CONSTRUCTION TOOLS
Now, verify that
�
��� ���� � ���� � � �� ��� ��� � �
�� � ���� ��� � ���� �
�� ��� � �
�� � � � � � ���
� � � � � � � � � ���� � � � � � � � �� � � � � � � �� � � � � � �
9.6 Summary of RulesPSfrag replacements
-axis
-axis
-axis�
���
Figure 9.14: A multipartfunction.
For quick reference, we summarize the consequence ofshifting and expanding symbolically and pictorially. Therunning example for Tables 9.1, 9.2, and 9.3 will be amultipart function � � � � � whose graph, seen in Fig-ure 9.14, consists of a line segment and a quarter circleon the domain � � � � :
� � � �� � � if � � ��� �
� � if � �

9.6. SUMMARY OF RULES 133
Reflection
SymbolicChange
New Equa-tion
GraphicalConsequence Picture
Replace with� . � � � � � � A reflection
across the� -axis.
PSfrag replacements
-axis
-axis
-axis
�
�
��
Replace� � �
with � � � � . � � � � � � A reflectionacross the -axis.
PSfrag replacements
-axis
-axis
-axis
�
��
��
Table 9.1: Reflecting � � � � ��� .

134 CHAPTER 9. THREE CONSTRUCTION TOOLS
Shifting (Assume ����
)
SymbolicChange
New Equa-tion
GraphicalConsequence Picture
Replace with� � � � . � � � � � � � A shift to theright � units.
PSfrag replacements
-axis
-axis
-axis
�
�
�Replace with� � � � . � � � � � � � A shift to the
left � units.
PSfrag replacements
-axis
-axis
-axis�
��
� �Replace
� � �with
� � � � � � � . � � � � � � � A shift up �units.
PSfrag replacements
-axis
-axis
-axis
�
�
��
�
Replace� � �
with� � � ��� � � . � � � � ��� � A shift down �
units.
PSfrag replacements
-axis
-axis
-axis�
�
� �
Table 9.2: Shifting ��� � � � � .

9.6. SUMMARY OF RULES 135
Dilation
SymbolicChange
New Equa-tion
GraphicalConsequence Picture
If ��� , replace with � � � � . � � �
� �� A horizontal
expansion.
PSfrag replacements
-axis
-axis
-axis
� � �
���
�
�
��
��� ��
�� �� �
If �� � , re-place with � � � � . � � �
� �� A horizontal
compression.
���
���
PSfrag replacements
-axis
-axis
-axis
� � ��
���
�
�
��
��� ��
�� �� �
If ��� , replace� � � with
��� � � � . � ���
� � � A verticalexpansion.
���������
���������
�������������������������
�������������������������
PSfrag replacements
-axis
-axis
-axis
� � �
���
�
�
��
��� ��
�� �� �
If �� � , re-place
� � � with��� � � � .
� ���� � � A vertical
compression.������������
���
PSfrag replacements
-axis
-axis
-axis
� � ��
���
�
�
��
��� ��
�� �� �
Table 9.3: Dilating � � � � ��� .

136 CHAPTER 9. THREE CONSTRUCTION TOOLS
9.7 ExercisesProblem 9.1. On a single set of axes, sketcha picture of the graphs of the following fourequations: ��� � � � � � , ��� � � � � � , � � � �
�� ,
and � � � ��� . These equations determine
lines, which in turn bound a diamond shapedregion in the plane.
(a) Show that the unit circle sits inside thisdiamond tangentially; i.e. show that theunit circle intersects each of the fourlines exactly once.
(b) Find the intersection points between theunit circle and each of the four lines.
(c) Construct a diamond shaped region inwhich the circle of radius � centered at� � � �#� ��� sits tangentially. Use the tech-niques of this section to help.
Problem 9.2. The graph of a function � � � � ���is pictured with domain � � � � � � . Sketchthe graph of the new function
� � � � ��� � �� � � � � � � �� Find the largest possible domain of the func-tion � � � � � ��� .
π/2
π
−1 1x
y
f(x)
PSfrag replacements
-axis-axis
-axis
Problem 9.3. (a) Each of the six functions� � � � � � below can be written in the“standard form”
� � ��� � � � � � �
� � �
for some constants � � � � � � � . Find theseconstants, describe the precise order ofgraphical operations involved in goingfrom the graph of � � �
��to the graph of
� � � � ��� (paying close attention to the or-der), write out the multipart rule, sketchthe graph and calculate the coordinatesof the “vertex” of the graph.
(a1)� � ��� � �
� � ��
(a2)� � ��� ��� �
� � ��
(a3)� � ��� � �
� � � ��
(a4)� � ��� � �
� � � � ��� �(a5)
� � ��� � � �� � � �
��
(a6)� � ��� � � � �
� � ��� �
(b) Solve the following inequalities usingyour work in the previous part of thisproblem:
(b1)�� � �
� � �(b2) � ��� �
� � �� �
(b3) � � � �� � � �
�� � ���
(c) The graphs of � � ��� � � �
��
and ��� � �� � �
�� ��� intersect to form a
bounded region of the plane. Find thevertices of this region and sketch a pic-ture.
Problem 9.4. Consider the function � � � � ���with multipart definition
� � ��� �������
� � if � � � �� � � � if � � � � � �� � � � if � � ����� if �����
(a) Sketch the graph of � � � � ��� .(b) Is � � � � ��� an even function? Is ��� � � ���
an odd function? (A function � � � � ��� iscalled even if
� � ��� � � � � ��� for all � in thedomain. A function ��� � � ��� is called oddif� � � ��� � � � � ��� for all � in the domain.)
(c) Sketch the reflection of the graph acrossthe � -axis and � -axis. Obtain the re-sulting multipart equations for these re-flected curves.
(d) Sketch the vertical dilations � � � � � ���and � � �
�� � ��� .

9.7. EXERCISES 137
(e) Sketch the horizontal dilations � � � � � ���and � � � � �� ��� .
(f) Find a number � % � so that the highestpoint on the graph of the vertical dilation� � � � � ��� has � -coordinate 11.
(g) Using horizontal dilation, find a number� %�� so that the function values� � � � are
non-zero for all ��
� � � � .
(h) Using horizontal dilation, find positivenumbers � � � % � so that the functionvalues
� � � � � ��� � � are non-zero preciselywhen � � � � � .
Problem 9.5. A typical home gas furnacecontains a heat exchanger which consists ofa bunch of cylindrical metal tubes throughwhich air passes as the flames heat the tube.As a furnace ages, these tubes can deform andcrack, allowing deadly carbon monoxide gas toleak into the house. Suppose the cross-sectionof a heat exchanger tube is a circle of radius cm when
flames heating tube...
heat exchangertubing
warm air out
cool air in
PSfrag replacements
-axis-axis
-axis
it is brand new. As the furnace ages, as-sume the bottom semicircular cross-sectiondeforms according to the vertical dilation prin-ciple 9.4.1 with a deformation constant of
� � � � ��� � ��� �"��� � � � � ���
after � years. The top semicircular cross-section does not deform.
(a) Sketch an accurate picture of the cross-section of the heat exchanger tubing af-ter 10 and 15 years.
(b) Suppose the metal in the tubing willcrack if it deforms more than 3 cm outof the original shape. When will the ex-changer crack?
(c) When will the cross-section of the heatexchanger tubing look like the picture?
-4 -2 2 4
-6
-4
-2
2
4
PSfrag replacements
-axis-axis
-axis
Problem 9.6. An isosceles triangle has sidesof length � , � and � . In addition, assume thetriangle has perimeter 12.
(a) Find the rule for a function that com-putes the area of the triangle as a func-tion of � . Describe the largest possibledomain of this function.
(b) The graph of�
� � � ��� from part (a) isgiven below. Sketch the graph and findthe rule for the function
�
����� � � � � � � � � ;make sure to specify the domain andrange of this new function.
2 4 6 8 10
2
4
6
8
10
PSfrag replacements
� -axis
� -axis
-axis
(c) Assume that the maximum value of thefunction � � ��� in (a) occurs when � � � .Find the maximum value of
�
� � � ��� and�
� ��� � � � � ��� � � .
Problem 9.7. Describe how each graph differsfrom that of � � � � .
(a) � � � � �(b) � � ��� �

138 CHAPTER 9. THREE CONSTRUCTION TOOLS
(c) � ��� � ��� � �(d) � ��� � � � ����� �(e) � ��� � � � � ����� � �
Problem 9.8. Let � � be positive constants.We will work with the ellipse equation� �
� � � �� � � � � ��
(a) Solve the equation for � in terms of � ;you should get two different functions.
(b) By plotting points, sketch the graphs ofthe functions in (a) when � � � and ��� ;or � ��� and � � .
(c) Describe how to use horizontal and ver-tical dilation to obtain the pictures in theprevious part, starting from the unit cir-cle (the circle of radius 1 centered at theorigin).
Problem 9.9. Let � � � � � � be constants, with� � both positive.
(a) Start with a function � � � � ��� and let� � � � ��� � �
� �� � � � � � � � � . Describe howto go from the graph of � � � � � � to the
graph of � � � � � � � � � using the graph-ical operations of shifting and dilationin the horizontal and vertical directions.Make sure to carefully specify the orderin which you should do the graphical op-erations.
(b) If � � � � ��� � ��
�and � � � � � � � � � � � � � �
��� � � � , sketch the graphs of ��� � � ��� and� � � � � � ��� � and write out their multipartrules.
Problem 9.10. In each case, start with thefunction � �
��
�and perform the operations
described to the graph, in the order specified.Write out the resulting rule for the functionand sketch the final graph you obtain.
(a) (1) horizontally compress by a factor of2; (2) horizontally shift to the left by 2;(3) vertically stretch by a factor of 7; (4)vertically shift up 2 units.
(b) (1) horizontally stretch by a factor of 2;(2) horizontally shift to the right by 2; (3)vertically compress by a factor of 7; (4)vertically shift down 2 units.
(c) (1) horizontally shift to the right 2 units;(2) horizontally compress by a factor of3.

Chapter 10
Arithmetic
There is yet another way to build new functions from known functions,this time relying on what we know about the arithmetic operations fornumbers. We begin with a simple example from cellular biology.
1 2 3 4 5
−70
PSfrag replacements
-axis
-axis
-axis
mV
msec
resting potential
(a) Resting potential.
PSfrag replacements
-axis
-axis
-axis
probe B
sensor
probe A
main cell body
voltmeter
(b) Probing the cell.
Figure 10.1: A cellular biology experiment.
A biologist has isolated a single nerve cell (a neuron) and plans tomake some experimental measurements. It turns out that there is al-ways a voltage difference between the inside and outside of a living cell.We will focus on an experiment involving the measurement of this volt-age, as a function of time. To begin with, the measurement of voltagein this experiment is in units of volts; the number tells us the tendencyof a single unit of positive charge to move from the inside to the outsideof the cell. In any event, if we do nothing to this nerve cell, the volt-age measured turns out to be � � � mV; “mV” stands for “millivolts,” or� � ��� � � � volts. The fact that we have a minus sign means a positivecharge will move inward rather than outward. The plot below indicates asteady constant voltage (called the resting potential ), where we will usemsec=milliseconds for time units. Our nerve cell is attached to a touchsensor near the surface of an animal and the biologist has set up an
139

140 CHAPTER 10. ARITHMETIC
apparatus that will activate two different probes that will push on thesensor with equal force upon command.
mV
−50−70
2 3 4 5 61
msec
PSfrag replacements
-axis
-axis
-axis
(a) Experiment #1.
mV
−50−70
2 3 4 5 61
msec
PSfrag replacements
-axis
-axis
-axis
(b) Experiment #2.
Figure 10.2: Raw experimental data.
In experiment #1, the biologist has probe A touch the sensor at time� � and the voltage recordings for the cell are given in the plot shownin Figure 10.2(a). In experiment #2, the biologist has probe B touch thesensor at time � � � and the voltage recordings for the cell are given inthe plot shown in Figure 10.2(b).
What we want to indicate is how each of the plots in experiments #1and #2 could have been obtained by an “addition process.” For example,the plot in experiment #1 can be obtained by adding together the twoplots, as pictured in Figure 10.3.
−70
2 3 4 5 61
−70
2 3 4 5 61
−70
2 3 4 5 61
−50−50−50
PSfrag replacements
-axis
-axis
-axis
mVmVmV
msecmsecmsec
Figure 10.3: Adding experimental voltages.
10.1 Function Arithmetic
We want to use the arithmetic operations for numbers: � � � � �to combine two functions. On a symbolic equations level, this is easy todo. If we begin with two functions � � � � � and � � �
� � , we can form the

10.1. FUNCTION ARITHMETIC 141
new functions:� �� � � � � � � � � � �
� � �� � � � � � � � � � ��� �� � �� � � � � � � � � � � � � � (10.1)� �
� � � � �� � ��� � as long as the denominator �
� � ���� .Examples 10.1.1.
(i) Let � � � � � �� ��� � � � � �
and � � �� � � � �
�with the domain
all real numbers. Then a direct calculation shows that� �� � � � � ��
� � � � � � � � � � � � � � �� � � � � � � � � � � � � � �
� � � � �
� � � � � � � � � � � �� � � � � � � � � � ��� � � �
��� � �
Notice that�� is defined for all , since the denominator is never going
to be zero.
(ii) Let � � � � � � and � � �� � � �
�� � . The largest possible commondomain is � ; why? We get
� � � � � � � � � ��� � � � � � � � � � �� �
� � � � � � � � � � � � � � � �� � � � � ��
� � �� . Notice that the domain
of allowed values is � for each of the first three functionsand � � for the last one; why?
Sometimes a function can be written as an arithmetic combination oftwo “simpler” functions. Here are some examples:
Examples 10.1.2.
(i) Suppose � � � � � � . Find simpler functions� � � and �
� � so that� � � � � � �
� � . To do this, let� � � � � and �
� � � � � . Anothercorrect answer would be
� � � � � � � and �� � �� .
(ii) Suppose � � � � � . Find simpler functions� � � and �
� � so that� � � � � � � � . To do this, let
� � � � and �� � � � � � .
(iii) Suppose � � � � ���� �
. Find simpler functions� � � and �
� � so that � �� �� �� � � � � � � � � . To do this, let
� � � �� � , �� � �� � and
� � � � .
(iv) Suppose � �� � � � � � � � � � � . Find simpler functions
� � � and �� �
so that � � � � � � � � . To do this, first factor � � � �� � � � � � � , then let
� � � ��� � and �
� � �� � � .
10.1.1 What about the domain?When you start combining functions as in Equation (10.1), you needto assume that you are using the same domain for each function. Forexample, suppose
� � � � � and �� � � �
�. We can take the domain of
� � �

142 CHAPTER 10. ARITHMETIC
to be all real numbers, but the largest possible domain of �� � would be
the non-zero numbers. When we form the new functions� � � � � � � �� � � �
�and� � � � �
� � � � � ��, the largest possible domain would be the non-zero
numbers.
10.2 Graphical Interpretation
PSfrag replacements
-axis
-axis
-axis
� � � � �� � � � �
� � � � � � �� � � � �
� � � � �� � � units
� unit
�units
� � �Figure 10.4:
� � � � and � � ��� .
What do these function arithmetic operations mean onthe level of their graphs? In the case of the addition andsubtraction operations, this is easy to illustrate by way ofexample. If
� � � �� � � and �� � � , Figure 10.4 illustrates
what is happening graphically at � and general .In Figure 10.5(a), we sketch
� � � � �� � � � , together
with graphical interpretation at � and general ; Figure 10.5(b) dealswith
� � ��� �� � � � .
1
PSfrag replacements
-axis
-axis
-axis
add�
co-ordinatesof these toget
�coordinateof
is� add
�coordinates ofthese pointsto get the
�coordinate of�
is � � �
� � � � � � � � �� � � � �
�
�
� � � � � �� � � � � � �
(a) Adding two graphs.
1
PSfrag replacements
-axis
-axis
-axis
subtract�
coordi-nates ofthese toget
�coordinateof
is�
subtract�
coordinates ofthese pointsto get the
�coordinate of�
is � � �� � � � � � � � �
� � � � ��
�
� � � � � �� � � � � � �
(b) Subtracting twographs.
Figure 10.5: Using function arithmetic.
This simple example illustrates how you can “add” or “subtract” twographs: Note that
� � � � � � is the point on the graph of� � � above (on
the -axis) and� �� � � � � is on the point on the graph of �
� � above (onthe -axis). The point on the graph of
� � � � �� � above on the -axis is
obtained by combining the � -coordinates:� � � � � � �
� � � �
10.3 Step FunctionsNow we are in a position to describe somewhat complicated functions interms of simpler ones, as suggested in Figure 10.3 on page 140. Forexample, the measurement of voltage as a function of time often leads toplots which involve jumps in voltage over a short time period. This wasillustrated in the experimental graphs in Figure 10.2. In practice, it is

10.3. STEP FUNCTIONS 143
common to model these sorts of plots with what are called step functionsas sketched in Figure 10.6(b).
30
20
10
1 2 3 4
PSfrag replacements
-axis
-axis
-axisvolts
time
(a) The actual voltage plot.
30
20
10
1 2 3 4
PSfrag replacements
-axis
-axis
-axisvolts
time
(b) A step function model.
Figure 10.6: A mathematical description of an experiment.
Roughly speaking, if we were to interpret the plot in Figure 10.6(a), inthe time interval between � � and � � , the voltage is 20 volts; otherwiseit is 10 volts. Of course, this is not quite accurate really close to � � or � � , but those portions of the graph are nearly vertical and ratherinsignificant when you look at the scale of the entire graph. We could, toa first approximation, replace the plot (Figure 10.6(a)) with the graph inFigure 10.6(b). Notice, this is the graph of the multipart function:
�� ��� �
�� � � if � � ��� if � � if �
This is an example of what is usually called a step function.
10.3.1 Building Step Functions
1 2−2 −1
PSfrag replacements
-axis� -axis
-axis
Figure 10.7: A basic stepfunction � � ��� .
We can begin with a basic step function � � ��� and showhow to build all others using our function building tools:
� � � � ��� ��� � � if � � if � � � if �
(10.2)
Example 10.3.1. Let � � ��� be the basic step function in Equation (10.2).Compute the multipart formula for � � � � � � and sketch the graph.
1 2 3 4
PSfrag replacements
-axis� -axis
-axis
Figure 10.8: � � � � ��� .
Solution. To start, notice this is really the calculation of acomposition of two functions. Moreover, by Fact 9.3.1,this is a horizontal shift of the basic step function inEquation (10.2). The complication is that one of thesefunctions is a multipart function. The key is to study how

144 CHAPTER 10. ARITHMETIC
the multipart rule is effected for each of the multipart cases of � � ��� seper-ately. Here is the procedure and the resulting graph: See Figure 10.8.
� � � � � � � � ��� � � if � � � � if � � � � � if � � �
��� � � if � � if � � � if �
Example 10.3.2. Let � � ��� be the basic step function in Equation (10.2).Compute the multipart rule for
� � � �
�� � � � � � � �
and sketch the graph. If this was modeling the voltage in an experiment,interpret what the graph is telling you.
1
3
4
2
4 10
PSfrag replacements
-axis� -axis
� -axis
Figure 10.9: Interpreting ex-perimental voltage.
Solution. As in the preceding example, we study how themultipart rule is effected for each of the multipart casesof � � ��� separately. We will start by finding the effect of thehorizontal shift and dilation:
� � ��� � � � � � � �
���� ���� if ��
� � ��� ��
if � ��� � �
��
� if ��� � �
��
��� � � if �
� if
� � �
� if � �
� � � �
�� � � � � � � � � �� � �
� � � ��� if � �
� � if� � ��
� � � ��� if � �
� �� �
��� � if �
��� if
� � � if � �
If this graph represents a voltage plot, the interpretation is as follows:The voltage is a constant 3 volts except during the time interval
� � � ,
during which time it jumps up to a constant 3.5 volts.

10.3. STEP FUNCTIONS 145
1
2
1 1
41
PSfrag replacements
-axis
� -axis � -axis� -axis
-axis
-axis
-axis
Figure 10.10: The graphical components of � � � � ��� � � � � � � � � � � � � � � .
Example 10.3.3. Let � � ��� be the basic step function in Figure 10.7 onpage 143. Sketch the graph of � � � � � ��� � � � � � � � ��� � � � � �
�� .
Solution. This is the same as � � � � � � ��� � � � � � � � � � � ���� � . In Figure 10.10
we graphically examine the components of the equation � � � � ��� � � � � �� ��� � � � �
�� . Then, we graph � � � � ��� � � � � � � ��� � � � �
�� which gives the
lefthand plot in Figure 10.11. Finally, we vertically dilate by a factor of 2to get the righthand plot of � � � � � ��� � � � � � � � � � � � � � �
�� .
1 2 3
41
−2
−1
2
akg
1 2 3
1
−2
−1
2
4
PSfrag replacements
-axis
� -axis� -axis
-axis
-axis
vertically dilate bya factor of
�
Figure 10.11: Bringing it all together.

146 CHAPTER 10. ARITHMETIC
10.4 ExercisesProblem 10.1. Use function arithmetic tosolve these problems.
(a) Suppose � � � �� � � �
. Find simpler func-
tions� � ��� , � � � � , and
� � ��� so that
� � � � ��� � � � � �� � ���
(b) Suppose � � � �� � � �
. Find simpler func-
tions� � ��� � � � ��� and
� � ��� so that
� �� � ���� � � � � � � �
(c) Suppose � � � � � � � ��� � ! � $ � � � � � � . Findsimpler functions
� � ��� and � � ��� so that
� � � � ��� � � ��� (d) Suppose � � � � � � � ��� � � � � $ � � � � . Find
simpler functions� � ��� and � � ��� so that
� � � � ��� � � ��� Problem 10.2. In each of the following cases,find a formula for � � � � � � ��� , � � � ��� � ��� , � � � ��� � ���and � � � � � ��� . In the division case, comment onany conditions required for the domain values.
(a)� � ��� ��� � � � and � � ��� � � � � � � � � .
(b)� � ��� ��� � � ��� � � � � � and � � ��� � � � � .
(c)� � � � � � � � � � � � � � and � � ��� � � � � � � � � � .
(d)� � ��� � � and � � ��� � � $ � � .
Problem 10.3. Let� � ��� � � , � � ��� � � and� � ��� � �
��. Write out the multipart rule and
graph each of these functions:
(a) � � � � ��� � � � ��� � � � ��� .(b) � � � � ��� � � ��� .(c) � � $�� ���
� � ��� , when ���� � .
Problem 10.4. (a) Determine the multipartrule and sketch the graph of the func-tion � � ��� � � �
��
�.
(b) Determine the multipart rule and sketchthe graph of the function
� � ��� � � ��� �
�.
(c) For ��% � , a function of the form� � � � �
� ��� �
�has a graph that looks like a line
with a bend in it. For what value(s) of �is the bend a right angle?
Problem 10.5. For each of the following func-tions, (1) find the multi-part rule, and (2)sketch the graph.
(a)� � ��� � �
� � ���
�� ���
�.
(b) � � ��� � �� � � �
�(c)
� � ��� � �� � ���
�� �
(d) � � ��� � � � ��� � � � � where
� � ��� ��
� if � � �� � � � if ��� �
and
� � � ��� � if � � �� � � if ��� �
Problem 10.6. Let � � ��� be as in 10.3.1 on Page143. Compute the multipart rules and graphsfor � � �� � � � ��� � and � � �� � ��� . Explain how toobtain each function from � � ��� by applying theoperations of Chapter 9; be very specific aboutthe order in which you apply the operations.
Problem 10.7. Let � � ��� be the basic step func-tion in 10.3.1 on Page 143. Form the NEWfunction
� � � � ��� � � �
��� � � � � � � � � �
where � � � � � � � are all non-negative constants.(For example, � � � � � , � � � � � is just� � ��� ; if � � ����� � � � !&� � � � � � � � , we getthe function in Example 10.3.2 on Page 144.)Consider the rectangle formed by the graph of� � � � ��� , the vertical line � � � , the vertical line� � � � � , and the � -axis. Sketch this regionand compute its area in terms of � � � � � � � .
Note: This problem is related to a topicin cellular biology called neuronal arithmetic.The combination of electrical signals arrivingat a nerve cell can be modeled by a sum offunctions of this type. Adding up the corre-sponding areas is of physical significance sinceit is a measurement of “work” being performed.

10.4. EXERCISES 147
Problem 10.8. Let � � ��� be the basic step func-tion:
� � ��� ��� � � if � � � ,� if �� � � � ,� if � % � .
Find the multipart rule for each of the follow-ing functions. Sketch the graph of each func-tion.
(a) � � ��� � ���(b) �
� � � �� ��� �(c) � � ��� � � � � � ���(d) � � �� � ��� � � � �� �(e) � � � ���(f) � � � ��� � � � � ���(g)
� � ���� � �� � � � � � � �
Problem 10.9. Mike is a Pearl Jam fanatic andgoes into a daze every time he hears the firsttrack of their latest CD. The loudness (in deci-bels) of this 4 minute track is modeled by thegraph of the function � � � � � ��� at time � min-utes; the graph is given below:
4
decibels
30
minutes
60
PSfrag replacements
-axis-axis
-axis
Suppose Mike makes three successive 4minute recordings of this track, after the orig-inal 4 minute track. Let
�� � ��� ,
�$ � ��� , and
�� � ���
represent the loudness (in decibels) of each ofthe 4 minute recordings, with
�� � ��� 15% louder
than�� � ��� ,
�$ � ��� 15% louder than
�� � ��� and
�� � ���
15% louder than�$ � ��� .
(a) Each function��� � ��� is of the form
��� � ��� ��� �� � � �
� � � ; find the constants ��
and� �
explicitly.
(b) Sketch the graph of
� � ��� � � � � ��� � � � � ��� � � $ � ��� � � � � ��� What does this graph represent?

148 CHAPTER 10. ARITHMETIC

Chapter 11
Inverse Functions
The experimental sciences are loaded with examples of functions relat-ing time and some measured quantity. In this case, time represents our“input” and the quantity we are measuring is the “output.” For example,maybe you have just mixed together some chemical reactants in a ves-sel. As time goes by, you measure the fraction of reactants remaining,tabulate your results, then sketch a graph as indicated in Figure 11.1.
PSfrag replacements
-axis
-axis
-axis
time
�
�
fraction
Figure 11.1: Fraction of re-actants as a function of time.
Viewing the input value as “time” and the output valueas “fraction of product,” we could find a function � � � � ���modeling this data. Using this function, you can easilycompute the fraction of reactants remaining at any timein the future. However, it is probably just as interestingto know how to predict the time when a given fractionof reactants exists. In other words, we would like a newfunction that allows us to input a “fraction of reactants”and get out the “time” when this occurs. This “reverses”the input/output roles in the original function. Is there asystematic way to find the new function if we know � � � � ��� ? The answeris yes and depends upon the general theory of inverse functions.
11.1 Concept of an Inverse Function
Suppose you are asked to solve the following three equations for . Howdo you proceed?
� � � � � � �� � � � � � � �� � � � � � � � �In the first equation, you add “ � � ” to each side, then obtain � � � . In
the third equation, you take the cube root of both sides of the equation,giving you � � �
�, then subtract 2 getting � � . In second equation,
you take a square root of both sides, BUT you need to remember both the
149

150 CHAPTER 11. INVERSE FUNCTIONS
positive and negative results when doing this. So, you are reduced downto � � � � � or that � � � or � � Why is it that in two of these cases youobtain a single solution, while in the remaining case there are two dif-ferent answers? We need to sort this out, since the underlying ideas willsurface when we address the inverse circular functions in Chapter 18.
PSfrag replacements
-axis
-axis
-axis
�In Out � �
� �
The function
Figure 11.2: A function as aprocess.
Let’s recall the conceptual idea of a function: A func-tion is a process which takes a number and outputs anew number
� � � . So far, we’ve only worked with this pro-cess from “left to right;” i.e., given , we simply put it intoa symbolic rule and out pops a new number
� � � . This isall pretty mechanical and straightforward.
11.1.1 An Example
Let’s schematically interpret what happens for the specific concrete ex-ample � � � � � � � , when � � , � �� , � , �� , , � : See Figure 11.3.
1
PSfrag replacements
-axis
-axis
-axis
����
�
�
� �� � � �
� � � �
� � � �
� � � �
� � � �� � � ��
� �� ���
� �
� �
out
out
outout
out
out
inin
in
in
in
in
Figure 11.3: Function process � ��� � � � .
We could try to understand the function process in this example in“reverse order,” going “right to left;” namely, you might ask what valuecan be run through the process so you end up with the number 11? Thisis somewhat like the “Jeopardy” game show: You know what the answeris, you want to find the question. For our example, if we start out withsome given � values, then we can define a “reverse process” � �� � � � � �which returns the value required so that
� � � � � : See Figure 11.4.

11.1. CONCEPT OF AN INVERSE FUNCTION 151
1
PSfrag replacements
-axis
-axis
-axis����
�
�
� � � � � � ��� � � � ��� � � � ��
� � � � ��� � � � ��� � � � ���
� �� ���
� �
� �
Figure 11.4: The reverse process � � �$ � � � ��� .
11.1.2 A Second ExampleIf we begin with a linear function � � � � � � � � � , where � ���� , then wecan always find a “reverse process” for the function. To find it, you mustsolve the equation � � � � � for in terms of � :
� � � � �� � � � �
��� � � � �
So, if � � and � � � , we just have the first example above.For another example, suppose � � � � � � � � ; then � � � � � � and � ��� .
In this case, the reverse process is � � � ��� � � � � � . If we are given thevalue � � , we simply compute that � � � � � ; i.e.,
� � � � � � � � .
11.1.3 A Third ExampleThe previous examples hide a subtle point that can arise when we try tounderstand the “reverse process” for a given function. Suppose we beginwith the function � � � � � � � � � � � . Figure 11.5 is a schematic of howthe function works when we plug in � � , � �� , � , �� , , � ; what is beingillustrated is a “forward process”, in that each input generates a uniqueoutput.
For this example, if we start out with some given � values, then we cantry to define a “reverse process” � �����
which returns an value requiredso that
� � � � � . Unfortunately, there is no way to obtain a single formulafor this reverse process; Figure 11.6(a) shows what happens if you aregiven � � and you try to solve for .

152 CHAPTER 11. INVERSE FUNCTIONS
1 1
PSfrag replacements
-axis
-axis
-axis
��
�� �
� ��� ��
�������� �� �
�������� � �
� � � � �
� � � � �
� � � � �
�������� � �
�
� �
� �out
out
out
out
out
out
in
in
inin
in
in
Figure 11.5: Function process � � � � ��� ��� � � ��� � � � .
The conclusion is that the “reverse process” has two outputs. Thisviolates the rules required for a function, so this is NOT a function. Thesolution is to create two new “reverse processes.”
PSfrag replacements
-axis
-axis
-axis
� � � �
� � � ��
reverseprocess�� � � � �� �
(a) Reverse process butnot a function.
PSfrag replacements
-axis
-axis
-axis
� � � �
� � � �
�
�
reverse
reverse
process
process
� � � � �
� � � � �� �
� �
(b) Two new reverseprocesses that are
functions.
Figure 11.6: What to do if areverse process is not a func-
tion.
Each of these “reverse processes” has a unique output;in other words, each of these “reverse processes” definesa function.
So, given � � , there are TWO possible values,namely � �
� � , so that� � � � � � � and
� � � � � � � .In other words, the reverse process is not given by a singleequation; there are TWO POSSIBLE reverse processes.
11.2 Graphical Idea of an Inverse
We have seen that finding inverses is related to solvingequations. However so far, the discussion has been sym-bolic; we have pushed around a few equations and inthe end generated some confusion. Let’s use the tools ofChapter 6 to visualize what is going on here. Suppose weare given the graph of a function
� � � as in Figure 11.7(a).What input values result in an output value of 3? Thisinvolves finding all such that
� � � � . Graphically, thismeans we are trying to find points on the graph of
� � �so that their � -coordinates are � The easiest way to to dothis is to draw the line � � and find where it intersectsthe graph.
In Figure 11.7(b) we can see the points of intersectionare
� � � � � , � � � � , and� � � � . That means that � � �
, � ,�produce the output value ; i.e.,
� � � � � � � � � � � � � � � � .

11.2. GRAPHICAL IDEA OF AN INVERSE 153PSfrag replacements
-axis
-axis
-axis � � � �
� � � � � �
(a) Given the function� � � � � � .
PSfrag replacements
-axis
-axis
-axis
�
�� �� �
� �
� � � � � �
� � �(b) What values of � give� � � � � � ?
Figure 11.7: Using the horizontal line ��� � to find values on the � -axis.
This leads to our first important fact about the “reverse process” for afunction:
Important Fact 11.2.1. Given a number � , the values such that� � � � �
can be found by finding the -coordinates of the intersection points of thegraphs of � � � � � and � ��� .
Example 11.2.2. Graph � � � � � �� � and discuss the meaning of Fact 11.2.1when � � � � � .
PSfrag replacements
-axis
-axis
-axis
� � �� � �� � �
� � ��
Figure 11.8: Graph of � �� � ��� � � � .
Solution. We graph ��� � and the lines ��� , ��� and��� � . Let’s use � � � as an example. We need to simul-taneously solve the equations � � � and � � � . Puttingthese together, we get � � � or �� �
� ��� � � �� � �
; i.e.,� �� � �
� � � � � � . If � � , we get � � � � � ; i.e.,� �� � � � � � .
Finally, if � � , we get � � ; i.e.,� �� � � .
The pictures so far indicate another very importantpiece of information. For any number � , we can tell ex-actly “how many” input values lead to the same output value � , just bycounting the number of times the graphs of � � � � � and � � � intersect.
Important Fact 11.2.3. For any function� � � and any number � , the num-
ber of values so that� � � � � is the number of times the graphs of � � �
and � � � � � intersect.

154 CHAPTER 11. INVERSE FUNCTIONS
Examples 11.2.4.
(i) If� � � is a linear function
� � � � � � � � � �� � , then the graph of� � � intersects a given horizontal line � � � EXACTLY once; i.e., theequation � � � � � always has a unique solution.
(ii) If� � � � � is a constant function and � � � , then every input value
in the domain leads to the output value � . On the other hand, if � �� � ,then no input value will lead to the output value � . For example, if� � � � and � � , then every real number can be input to producean output of 1; if � ��� , then no input value of will lead to an outputof � �
PSfrag replacements
-axis
-axis
-axis
� -axis� -axis
the only input which
leads to an output of �
� � �
� -axis� -axis
� �� �� � ���
�
linear functions
� �� ���
constant functions
any of these inputs
leads to an output of �
Figure 11.9: Does a horizontal line � � � intersect a curve once or more than once?
11.2.1 One-to-one Functions
For a specified domain, one-to-one functions are functions with the prop-erty: Given any number � , there is at most one input value in the do-main so that
� � � � � . Among our examples thus far, linear functions(degree 1 polynomials) are always one-to-one. However,
� � � � � is notone-to-one; we’ve already seen that it can have two values for some of itsinverses. By Fact 11.2.3, we can quickly come up with what’s called thehorizontal line test.
Important Fact 11.2.5 (Horizontal Line Test). On a given domain of -values, if the graph of some function
� � � has the property that everyhorizontal line crosses the graph at most only once, then the function isone-to-one on this domain.

11.3. INVERSE FUNCTIONS 155
PSfrag replacements
-axis
-axis
-axis
horizontal
lines
x-axis
y-axis
Figure 11.10: A one-to-onefunction
� � ��� � � $ .
Example 11.2.6. By the horizontal line test, it is easy tosee that
� � � � � is one-to-one on the domain of all realnumbers.
Although it isn’t common, it’s quite nice when a func-tion is one-to-one because we don’t need to worry asmuch about the number of input values producing thesame output � value. In effect, this is saying that we candefine a “reverse process” for the function � � � � � whichwill also be a function; this is the key theme of the nextsection.
11.3 Inverse Functions
Let’s now come face to face with the problem of finding the “reverse pro-cess” for a given function ��� � � � . It is important to keep in mind thatthe domain and range of the function will both play an important role inthis whole development. For example, Figure 11.11 shows the function� � � � � with three different domains specified and the correspondingrange values.
PSfrag replacements
-axis
-axis
-axisrange
range range
domaindomain domain
Figure 11.11: Possible domains for a given range.
These comments set the stage for a third important fact. Since thedomain and range of the function and its inverse rule are going to beintimately related, we want to use notation that will highlight this fact.We have been using the letters and � for the domain (input) and range(output) variables of
� � � and the “reverse process” is going to reversethese roles. It then seems natural to simply write � (instead of � ) for theinput values of the “reverse process” and for its output values.

156 CHAPTER 11. INVERSE FUNCTIONS
Important Fact 11.3.1. Suppose a function� � � is one-to-one on a domain
of values. Then define a NEW FUNCTION by the rule� � � � � � � the value so that
� � � � � �The domain of � values for the function
� � ��� � is equal to the range of the
function� � � .
The rule defined here is the “reverse process” for the given function. Itis referred to as the inverse function and we read
� � ��� � as “...eff inverse
of � ...”.
Both the “domain” of � � � � and the “rule” � ��� � have equal influence onwhether the inverse rule is a function. Keep in mind, you do NOT get aninverse function automatically from functions that are not one-to-one!
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis
11.3.1 Schematic Idea of an Inverse FunctionSuppose that
� � � is one-to-one, so that� � �
�� � is a function. As a result,
we can model� � �
�� � as a black box. What does it do? If we put in � in
the input side, we should get out the such that� � � � � .
PSfrag replacements
-axis
-axis
-axis
in out
� � such that� � � � � �
� � � � � �
Figure 11.12: A new func-tion � � � � � � � � .
Now, let’s try to unravel something very special that ishappening on a symbolic level. What would happen if weplugged
� ��� � into the inverse function for some number�?
Then the inverse rule� � �
� � ��� � � tells us that we want tofind some so that
� � � � � ��� � . But, we already know � �
works and since� � �
�� � is a function (hence gives us
unique answers), the output of� � �
� � ��� � � is just�. Sym-
bolically, this means we have Fact 11.3.2.
Important Fact 11.3.2. For every�
value in the domain of� � � , we have
� � � � � ��� � � � �� (11.1)
This is better shown in the black box picture of Figure 11.13.
PSfrag replacements
-axis
-axis
-axis
�� inin � �� �
out out� � � � � � � � � �
Figure 11.13: Visualizing� � ��� � � � � � � � .
A good way to get an idea of what an inverse function is doing is toremember that
� � ��� � reverses the process of
� � � . We can think of� � �
�� �
as a “black box” running� � � backwards.

11.4. TRYING TO INVERT A NON ONE-TO-ONE FUNCTION 157
11.3.2 Graphing Inverse FunctionsHow can we get the graph of an inverse function? The idea is to manip-ulate the graph of our original one-to-one function in some prescribedway, ending up with the graph of
� � ��� � . This isn’t as hard as it sounds,
but some confusion with the variables enters into play. Remember thata typical point on the graph of a function � � � � � looks like
� �� � � � � . Nowlet’s take a look at the inverse function � � � �
�� � . Given a number � in
the domain of� � �
�� � , � � � � � for some in the domain of
� � � ; i.e., we areusing the fact that the domain of
� � � equals the range of�. The function
� � ��� � takes the number
� � � and sends it to , by Fact 11.3.2. So when� � � is the input value, becomes the output value. Conclude a point onthe graph of
� � ��� � looks like
� � � � � � . It’s similar to the graph of � � � � � ,only the and � coordinates have reversed! What does that do to thegraph? Essentially, you reorient the picture so that the positive -axisand positive � -axis are interchanged. Figure 11.14 shows the process forthe function � � � � � � � and its inverse function � � � �
�� � � �� � . We
place some � symbols on the graph to help keep track of what is happen-ing.
*
* *
**
*
**
*
PSfrag replacements
-axis
-axis
-axis
� � � axis� � � axis
� � � axis
� � � axis
� � � axis
� � � axisrotate
� � �clockwise
flip acrosshoriz axis
Figure 11.14: Graphically finding � � � � ��� � � � �� � .
11.4 Trying to Invert a Non one-to-one Func-tion
Suppose we blindly try to show that� � is the inverse function for � �� � ,
without worrying about all of this one-to-one stuff. We’ll start out withthe number � �
. If� � �
�� � � � � , then we know that
� � � � � � � � � � � � � � �� � � � � �
On the other hand, the formula in Fact 11.3.2 tells us that we must have� � � � � � � � � � � � � �
so we have just shown� � � �
! So clearly� � �
�� � �� � � . Even if we try
� � ��� � � � � � , we produce a contradiction. It seems that if you didn’t have

158 CHAPTER 11. INVERSE FUNCTIONS
to worry about negative numbers, things would be all right. Then youcould say that
� � ��� � � � � . Let’s try to see what this means graphically.
Let’s set� � � � � , but only for non-negative -values. That means
that we want to erase the graph to the left of the � -axis (so remember - nonegative -values allowed). The graph would then look like Figure 11.15.
PSfrag replacements
-axis
-axis
-axis
� �
� �
� �
� �
domain non-negative �
inverse function
domain non-negative �
� �
� � ��
Figure 11.15: Restricting the domain: No negative � -values.
This is a now a one-to-one function! And now, one can see that itsinverse function is
� � . Similarly, we could have taken� � � �� � but only
for the non-positive -values. In that case,� � �
�� � � � � � . In effect, we
have split the graph of � � � into two parts, each of which is the graphof a one-to-one function; Figure 11.16.
PSfrag replacements
-axis
-axis
-axis
� �
� �
� �
� �
domain non-positive � inverse function
domain non-negative �
�� �
� � ��
Figure 11.16: Restricting the domain: No positive � -values.
It is precisely this splitting into two cases that leads us to multiplesolutions of an equation like � � �
. We obtain � � �and � �
� �; one

11.4. TRYING TO INVERT A NON ONE-TO-ONE FUNCTION 159
solution comes from the side of the graph to the left of the � -axis, andthe other from the right of the � -axis. This is because we have separateinverse functions for the left and right side of the graph of � �� � .

160 CHAPTER 11. INVERSE FUNCTIONS
11.5 ExercisesProblem 11.1. Let
� � ��� � �$ ��� � on the largest
domain for which the formula makes sense.
(a) Find the domain and range of� � � � , then
sketch the graph.
(b) Find the domain, range and rule forthe inverse function
� � � , then sketch itsgraph.
Problem 11.2. Find the inverse function of theeach of the following functions. Specify the do-mains of the inverse functions.
(a)� � ��� � �
� ��
(b)� � ��� �
� � �(c) � � ��� � � � � � � �
(d) � � ��� � �� �
�� � �
(e) � � ��� � � ��! � � � � �� �� �Problem 11.3. For this problem, � � � � � � �� � � � � � � � on the domain of all real numbers.
(a) Sketch the function graph and find thecoordinates of the vertex � � � � � �� .
(b) Explain why � � � � ��� does not have aninverse function on the domain of all realnumbers.
(c) Restrict � � � � ��� to the domain � � �� � and find the formula for the inversefunction
� � ��� � � . What are the domainand range of the inverse function?
(d) Restrict � � � � ��� to the domain � � �� � and find the formula for the inversefunction
� � ��� � � . What are the domainand range of the inverse function?
Problem 11.4. A function is called onto if ev-ery horizontal line will intersect the graph atleast once.
(a) Show that � $ is onto and that � � is notonto.
(b) Draw pictures of a graph (you do notneed an algebraic formula - just thegraph) of a function with domain allreal numbers which is (i) one-to-one andonto (don’t use � $ ) (ii) one-to-one but notonto (iii) not one-to-one but onto (iv) nei-ther one-to-one nor onto (don’t use � � )
Problem 11.5. Show that the functions � ���$ , � � � � � � and � � � � � are one-to-one bychecking their graphs.
Problem 11.6. Which of the following graphsare one-to-one? If they are not one-to-one, sec-tion the graph up into parts that are one-to-one.
D
A B
C
PSfrag replacements
-axis-axis
-axis
Problem 11.7. Show that, for every value of � ,the function� � ��� � � � �
� � �
is its own inverse.
Problem 11.8. Clovis is standing at the edgeof a cliff, which slopes 4 feet downward fromhim for every 1 horizontal foot. He launchesa small model rocket from where he is stand-ing. With the origin of the coordinate systemlocated where he is standing, and the � -axisextending horizontally, the path of the rocketis described by the formula � � � � � � � ���"� � .
(a) Give a function� � � � ��� relating the
height�
of the rocket above the slopingground to its � -coordinate.
(b) Find the maximum height of the rocketabove the sloping ground. What is its� -coordinate when it is at its maximumheight?

11.5. EXERCISES 161
(c) Clovis measures its height�
of therocket above the sloping ground while itis going up. Give a function � � � � � � re-lating the � -coordinate of the rocket to�.
(d) Does this function still work when therocket is going down? Explain.
Problem 11.9. For each of the following func-tions: (1) sketch the function, (2) find the in-verse function(s), and (3) sketch the inversefunction(s). In each case, indicate the correctdomains and ranges. (4) Finally, make sureyou test each of the functions you propose asan inverse with the following compositions:� � � � � � ��� � �
� �and � � � � � � ��� � �
� � (a)� � ��� ��� � � �
(b)� � ��� � �
� � � (c)� � ��� � � � � � � � � � �
(d)� � ��� � � � � � � � ��� � � �
(e)� � ��� � �
� � � � , � � � � �Problem 11.10. A trough has a semicircularcross section with a radius of 5 feet. Waterstarts flowing into the trough in such a waythat the depth of the water is increasing at arate of 2 inches per hour.
water
5 ft
cross-section oftrough
PSfrag replacements
-axis-axis
-axis
(a) Give a function � � � � ��� relating thewidth � of the surface of the water tothe time � , in hours. Make sure to spec-ify the domain and compute the rangetoo.
(b) After how many hours will the surface ofthe water have width of 6 feet?
(c) Give a function � � � � � ��� � relating thetime to the width of the surface of thewater. Make sure to specify the domainand compute the range too.
Problem 11.11. A biochemical experimentinvolves combining together two protein ex-tracts. Suppose a function
� � ��� monitors theamount (nanograms) of extract A remaining attime � (nanoseconds). Assume you know thesefacts:
1. The function�
is invertible; i.e., it hasan inverse function.
2.� � � � � ! , � � ��� � , � � ��� � � , � � � � � � ,� � � � � �� , � � ����� � � .
(a) At what time do you know there will be3 nanograms of extract A remaining?
(b) What is��� � � �� �� and what does it tell
you?
(c) (True or False) There is exactly one timewhen the amount of extract A remainingis 4 nanograms.
(d) Calculate� � ��� � � ��� � �
(e) Calculate� � ��� � � ! � � �
(f) What is the domain and range of�
?

162 CHAPTER 11. INVERSE FUNCTIONS

Chapter 12
Rational Functions
−10 −5 5 10
2
4
6
−2
−4
−6
PSfrag replacements
� -axis
� -axis
-axis
Figure 12.1: The graph of� � � � � �� .
A rational function is a function of the form� � � � �
�� �� �� �
where �� � and � � � are polynomials. The easiest example
is� � � � �
�which we graph in Figure 12.1.
An asymptote is a line that the graph of a functiongets very close to, without ever quite reaching it. Notethat as gets very large, the graph of � � �
�becomes
very close to the -axis. The line � � � is a horizontalasymptote for the function. When is close to 0, thegraph is very close to the � -axis. The line � � is a verticalasymptote for this function. Note that the graph goes upthe vertical asymptote on the right, and down it on the left. Now let’sconsider a general rational function
� � � � ��� �� �� �
. Our first question aboutany function is “What are its zeros?”
Example 12.0.1. Let� � � � �
��
� � � ���
� �. Describe the zeros for this function.
Solution. We wish to solve � � � � � for .� � � � �
� � � � � � �
� � � � � � � � � � � � � � � � � � � �
It appears that there are two answers, �� and � �� . But looking closerwe see that
� � � is undefined, because the bottom is zero. So � � �� is
really the only answer.
The problem in the last example can be avoided if we reduce our ra-tional function to lowest terms. In general, let
� � � � ��� �� �� �
be a rationalfunction which is reduced to lowest terms. Then the zeros of
� � � are the values where �
� � � � . Furthermore, the vertical asymptotes of � � � � �occur at the values where � � � � � .
163

164 CHAPTER 12. RATIONAL FUNCTIONS
Example 12.0.2. Put the rational function� � � � �
��
� � � ���
� �into lowest form.
Describe the zeros and asymptotes.
Solution.� � � �
� � � � � � �� � � � � �� � �
� Thus we have a zero at � � �� and the line � � is a vertical asymptote.To find the horizontal asymptote for this function, note that the value ofthe fraction does not change if we multiply top and bottom by �
�.
� � � � � � � �� �
�� � � �
��� �
�When is very large, �
�is very small and the value of � � � � � is very close
to��. Thus � � � is the horizontal asymptote for
� � � .Example 12.0.3. Let �
� � � � � ���
�� . Describe the zeros and asymptotes.
Solution. As before, the value of �� � for �� � does not change if we
multiply both the top and the bottom by ��� . So, we have, for �� � ,
�� � � �
� � � ������
� ��� ���
��
��
When is very large, the numerator is close to 0 but the denominatoris close to 1. Thus the ratio is close to 0. We conclude that � � � is ahorizontal asymptote. Note that �
� � � � � ���
�� is in lowest terms. The top
vanishes at � � . This is the only zero of �� � . The bottom is zero
at �� � . Thus this function has two vertical asymptotes: � and � � .
Now we are almost ready to graph � � �� � � � � ��
��
� . But first it is usefulto figure out where the function is positive and where it is negative. Ofcourse, the graph can cross the -axis at the zero of the function. But itcan also jump across at the vertical asymptotes. The function �
� � hasone zero, � � , and two vertical asymptotes, � � and � . Markthese three values on a number line; see Figure 12.2. These points dividethe number line into four intervals. Check the function at a point in eachinterval. Here I use �� �
�, � � , 0 and 4. Other values would be just as
good. I conclude that �� � is negative when � or � � and
positive when � � or � .

165
−3−4 −2 −1 0 1 432
PSfrag replacements
� -axis
-axis
-axis
� � � � ��� � � � �� ��� � � � ����� � � � � ��� �
negativenegative positivepositive
Figure 12.2: Sign of � � ��� .
alo
PSfrag replacements
� -axis
� -axis
-axis
� � � � � � �
Figure 12.3: Starting thegraph of � � ��� � � � �� � � � .
Now let’s graph � � �� � � � � �
��
�� . First draw a pair of
axes and sketch in the vertical asymptotes � � and � . We know that the -axis is a horizontal asymptote.Note that
� � � � � is the only place where the graph crossesthe -axis.
Coming in from the right we have � and so �� � �
� . Thus the graph must come in above the horizontalasymptote and go up � on the right.
Next, we are in the interval � so �� � is neg-
ative. Thus the graph must go down � on the left.Continue this reasoning to get the rest of the graph.
alo
PSfrag replacements
� -axis
� -axis
-axis
� � � � � � �
� � � � ���
Figure 12.4: The graph of� � ��� on the right of � � � .
A rational function is called linear-to-linear if both thetop and the bottom have degree one. This is a very im-portant class of functions, with many applications. Ingeneral, these look like
� � � �� � �� � �
where�, � , � , and � are real numbers. In fact, we can
always take � � . Here’s an example that shows how.

166 CHAPTER 12. RATIONAL FUNCTIONS
PSfrag replacements
� -axis
� -axis
-axis
� � � � � � �
� � � � ���
Figure 12.5: The final graphof � � ��� .
Example 12.0.4. Let� � � � �
� � � � � �. Then
� � � � � � � � � � ��
� � � � �This can be useful when we are trying to model some-
thing using linear-to-linear rational functions.
Example 12.0.5. Clyde makes extra money scalping tick-ets in front of the Safeco Field. The amount he charges for
a ticket depends on how many he has. If he only has one ticket, he charges$100 for it. If he has 10 tickets, he charges $80 a piece. But if he has alarge number of tickets, he will sell them for $50 each. How much will hecharge for a ticket if he holds 20 tickets?
Solution. We want to give a linear-to-linear rational function relating theprice of a ticket � to the number of tickets that Clyde is holding. As wesaw above, we can assume the function is of the form
� �� � � � �
where�, � and � are numbers. Note that � � �
is the horizontal asymp-tote. When is very large, � is close to 50. This means the line � � � � isa horizontal asymptote. Thus
� � � � and
� �� � � � � � �
Next we plug in the point� � � � � to get a linear equation in � and � .
� � �� � � � � �
� � � � �� � � � � �� � � � � � � �Similarly, plugging in
� � � � � � and doing a little algebra (do it now!)
gives another linear equation �� ��� � � � � � . Solving these two linearequations simultaneously gives � � � � � and � � ��� � . Thus our functionis
� �� � � ��� � � � � �
and, if Clyde holds 20 tickets, he will charge
� �� � ��� � ��� ���� � � � � � $
� � � ���per ticket.

12.1. EXERCISES 167
12.1 ExercisesProblem 12.1. Give the domain of each of thefollowing functions. Find the zeros. Sketcha graph and indicate any vertical or horizon-tal asymptotes. Give equations for the asymp-totes.
(a)� � � � � � ���� � (b) � � ��� � $ �
��
� � ��
(c)� � ��� � � � � � � �� � � (d) � � ��� � � � � � � �� � �
�
(e)� � ��� � � � $� � � $ � � � (f)
� � � � � �� � � � � � $
(g) � � ��� � � � � � � � � � � �� � � $ � � � �� � (h) � � ��� � � �
���
� � � � � � � � � �
Problem 12.2. The multipart function ��� � � ���is defined below:
� � ��� � �� � � � � �� � � � �� if ���� � and ���� �� if � � �� if � � �
(a) Sketch the graph of ��� � � ��� .(b) Restrict � � � � ��� to the domain � � � �
� and find the formula for the inversefunction
� � ��� � � .(c) Restrict � � � � ��� to the domain � � � and
find the formula for the inverse function� � � � � � .(d) Sketch the graphs of � � � � � � � and
� � � � � � ��� and describe their relation-ship with the original function graph in(a).
Problem 12.3. Let�
be a constant. For eachof the functions � � � � ��� given, calculate� � � � � ��� � � ����
and simplify so that plugging in� � � is de-
fined.
(a)� � ��� � � � � ��� .
(b)� � ��� � � � � � � ��� .
(c)� � ��� � �
��! � � � .
Problem 12.4. Oscar is hunting magneticfields with his gauss meter, a device for mea-suring the strength and polarity of magneticfields. The reading on the meter will increaseas Oscar gets closer to a magnet. Oscar is ina long hallway at the end of which is a roomcontaining an extremely strong magnet. Whenhe is far down the hallway from the room, the
meter reads a level of 0.2. He then walks downthe hallway and enters the room. When he hasgone 6 feet into the room, the meter reads 2.3.Eight feet into the room, the meter reads 4.4.
(a) Give a linear-to-linear rational model re-lating the meter reading � to how manyfeet � Oscar has gone into the room.
(b) How far must he go for the meter toreach 10? 100?
(c) Considering your function from part (a)and the results of part (b), how far intothe room do you think the magnet is?
Problem 12.5. In 1975 I bought an old Mar-tin ukulele for $200. In 1995 a similar ukewas selling for $900. In 1980 I bought a newKamaka uke for $100. In 1990 I sold it for$400.
(a) Give a linear model relating the price � ofthe Martin uke to the year � . Take � � �in 1975.
(b) Give a linear model relating the price �of the Kamaka uke to the year � . Againtake � � � in 1975.
(c) When is the value of the Martin twice thevalue of the Kamaka?
(d) Give a function� � ��� which gives the ratio
of the price of the Martin to the price ofthe Kamaka.
(e) In the long run, what will be the ratio ofthe prices of the ukuleles?
Problem 12.6. Isobel is producing and sellingcasette tapes of her rock band. When she hadsold 10 tapes, her net profit was $6. When shehad sold 20 tapes, however, her net profit hadshrunk to $4 due to increased production ex-penses. But when she had sold 30 tapes, hernet profit had rebounded to $8.
(a) Give a quadratic model relating Isobel’snet profit � to the number of tapes sold� .
(b) Divide the profit function in part (a) bythe number of tapes sold � to get a modelrelating average profit � per tape to thenumber of tapes sold.

168 CHAPTER 12. RATIONAL FUNCTIONS
(c) How many tapes must she sell in orderto make $1.20 per tape in net profit?
Problem 12.7. Find the linear-to-linear func-tion whose graph passes through the points� ��� ��� , � � ��� and � ����� ��� . What is its horizontalasymptote?
Problem 12.8. Find the linear-to-linear func-tion whose graph has � � ! as a horizontalasymptote and passes through � ��� ����� and � � � � .
Problem 12.9. The more you study for a cer-tain exam, the better your performance on it.If you study for 10 hours, your score will be65%. If you study for 20 hours, your score willbe 95%. You can get as close as you want toa perfect score just by studying long enough.Assume your percentage score is a linear-to-linear function of the number of hours thatyou study.
If you want a score of 80%, how long doyou need to study?
Problem 12.10. A street light is 10 feet Northof a straight bike path that runs East-West.Olav is bicycling down the path at a rate of 15MPH. At noon, Olav is 33 feet West of the pointon the bike path closest to the street light. (Seethe picture). The relationship between the in-tensity � of light (in candlepower) and the dis-tance � (in feet) from the light source is givenby � �
�� � , where � is a constant depending on
the light source.
(a) From 20 feet away, the street light hasan intensity of 1 candle. What is � ?
(b) Find a function which gives the intensityof the light shining on Olav as a functionof time, in seconds.
(c) When will the light on Olav have maxi-mum intensity?
(d) When will the intensity of the light be 2candles?
33ft
10ft
patholav
(Top View−looking down)
PSfrag replacements
-axis-axis
-axis
Problem 12.11. For each of the following findthe linear to linear function
� � � � satisfying thegiven requirements:
(a)� � ��� � � � � � ����� � ����� � � �"��� � ��
(b)� � ��� � ����� � � �� � � � � � ����� � �
(c)� � ����� � �"��� � � ����� � �� � and the graph of� � ��� has � � ��� as its horizontal asymp-tote
Problem 12.12. The number of customersin a local dive shop depends on the amountof money spent on advertising. If the shopspends nothing on advertising, there will be100 customers/day. If the shop spends$100, there will be 200 customers/day. Asthe amount spent on advertising increases,the number of customers/day increases andapproaches (but never exceeds) 400 cus-tomers/day.
(a) Find a linear to linear rational function� � � � ��� that calculates the number � ofcustomers/day if $ � is spent on adver-tising.
(b) How much must the shop spend on ad-vertising to have 300 customers/day.
(c) Sketch the graph of the function � � � � ���on the domain �� � � "����� .
(d) Find the rule, domain and range for theinverse function from part (c). Explainin words what the inverse function cal-culates.

Chapter 13
Measuring an Angle
PSfrag replacements
-axis
-axis
-axis
�
�
�
�� feet�
Cosmo
motors
around
the
circle
Figure 13.1: Cosmo the dogwalking a circular path.
So far, the equations we have studied have an algebraiccharacter, involving the variables and � , arithmetic op-erations and maybe extraction of roots. Restricting ourattention to such equations would limit our ability to de-scribe certain natural phenomena. An important exampleinvolves understanding motion around a circle, and it canbe motivated by analyzing a very simple scenario: Cosmothe dog, tied by a 20 foot long tether to a post, beginswalking around a circle. A number of very natural ques-tions arise:
Natural Questions 13.0.1. How can we measure the angles�����
,�� ���
, and�� ���
? How can we measure the arc lengths ������ ��� �
, arc� �� �
and arc� �� �
? Howcan we measure the rate Cosmo is moving around the circle? If we know how tomeasure angles, can we compute the coordinates of
�,�, and
? Turning this
around, if we know how to compute the coordinates of�,�, and
, can we then
measure the angles�����
,�� ���
, and�� ���
? Finally, how can we specify thedirection Cosmo is traveling?
We will answer all of these questions and see how the theory whichevolves can be applied to a variety of problems. The definition and basicproperties of the circular functions will emerge as a central theme in thisChapter. The full problem-solving power of these functions will becomeapparent in our discussion of sinusoidal functions in Chapter 17 andparameterized motion in Chapter 22.
The � -coordinate system is well equipped to study straight line mo-tion between two locations. For problems of this sort, the importanttool is the distance formula. However, as Cosmo has illustrated, not alltwo-dimensional motion is along a straight line. In this section, we willdescribe how to calculate length along a circular arc, which requires aquick review of angle measurement.
169

170 CHAPTER 13. MEASURING AN ANGLE
13.1 Standard and Central Angles
An angle is the union of two rays emanating from a common point calledthe vertex of the angle. A typical angle can be dynamically generatedby rotating a single ray from one position to another, sweeping counter-clockwise or clockwise: See Figure 13.2. We often insert a curved arrowto indicate the direction in which we are sweeping out the angle. The ray� � is called the initial side and � � the terminal side of the angle � ��� � .
PSfrag replacements
-axis
-axis
-axis
� �� �� �� �
� �
(terminal side)
(terminal side)
(initial side)
(initial side)vertex vertex
START SWEEP COUNTERCLOCKWISE
SWEEP CLOCKWISE
� ���
���
�
Figure 13.2: Angle � ��� � .
Working with angles, we need to agree on a standard frame of refer-ence for viewing them. Within the usual � -coordinate system, imagine amodel of � ��� � in Figure 13.2 constructed from two pieces of rigid wire,welded at the vertex. Sliding this model around inside the � -plane willnot distort its shape, only its position relative to the coordinate axis. So,we can slide the angle into position so that the initial side is coincidentwith the positive -axis and the vertex is the origin. Whenever we dothis, we say the angle is in standard position. Once an angle is in stan-dard position, we can construct a circle centered at the origin and viewour standard angle as cutting out a particular “pie shaped wedge” of thecorresponding disc.
Notice, the shaded regions in Figure 13.3 depend on whether we sweepthe angle counterclockwise or clockwise from the initial side. The portionof the “pie wedge” along the circle edge, which is an arc, is called the arcsubtended by the angle. We can keep track of this arc using the notation� � � � � � � . A central angle is any angle with vertex at the center of a circle,but its initial side may or may not be the positive -axis. For example,� � � � in the Figure beginning this Chapter is a central angle which is notin standard position.

13.2. AN ANALOGY 171PSfrag replacements
� -axis� -axis
� -axis � -axis-axis
COUNTERCLOCKWISE CLOCKWISE
vertex vertex
arc(�
)
arc(�
)
arc subtended
� �� �
� �
����
Figure 13.3: Standard angles and arcs.
13.2 An Analogy
To measure the dimensions of a box you would use a ruler. In otherwords, you use an instrument (the ruler) as a standard against whichyou measure the box. The ruler would most likely be divided up intoeither English units (inches) or metric units (centimeters), so we couldexpress the dimensions in a couple of different ways, depending on theunits desired.
By analogy, to measure the size of an angle, we need a standardagainst which any angle can be compared. In this section, we will de-scribe two standards commonly used: the degree method and the radianmethod of angle measurement. The key idea is this: Beginning with acircular region, describe how to construct a “basic” pie shaped wedgewhose interior angle becomes the standard unit of angle measurement.
13.3 Degree Method
Begin by drawing a circle of radius � , call it� � , centered at the origin.
Divide this circle into 360 equal sized pie shaped wedges, beginning withthe the point
� � ��� � on the circle; i.e. the place where the circle crosses the -axis.
We will refer to the arcs along the outside edges of these wedges asone-degree arcs. Why 360 equal sized arcs? The reason for doing sois historically tied to the fact that the ancient Babylonians did so asthey developed their study of astronomy. (There is actually an alternatesystem based on dividing the circular region into 400 equal sized wedges.)Any central angle which subtends one of these 360 equal sized arcs is

172 CHAPTER 13. MEASURING AN ANGLE
PSfrag replacements
-axis
-axis
-axis
a total of 360equal sizedpie shapedwedges insidethis disk
etc.
etc.
circle�
� � � ��� typicalwedge
this angle isDEFINED tohave measure1 degree
***NOT TO SCALE***
��
Figure 13.4: Wedges as � � arcs.
defined to have a measure of one degree, denoted �.
We can now use one-degree arcs to measure any angle: Begin by slid-ing the angle � ��� � into standard central position, as in Figure 13.3.Piece together consecutive one-degree arcs in a counterclockwise or clock-wise direction, beginning from the initial side and working toward theterminal side, approximating the angle � ��� � to the nearest degree. Ifwe are allowed to divide a one-degree arc into a fractional portion, thenwe could precisely determine the number � of one-degree arcs whichconsecutively fit together into the given arc. If we are sweeping counter-clockwise from the initial side of the angle, � is defined to be the degreemeasure of the angle. If we sweep in a clockwise direction, then � � isdefined to be the degree measure of the angle. So, in Figure 13.3, theleft-hand angle has positive degree measure while the right-hand anglehas negative degree measure. Simple examples would be angles like theones in Figure 13.5.
Notice, with our conventions, the rays determining an angle with mea-sure � � � � sit inside the circle in the same position as those for an angleof measure � � ��� ; the minus sign keeps track of sweeping the positive -axis clockwise (rather than counterclockwise).
We can further divide a one-degree arc into 60 equal arcs, each calleda one minute arc. Each one-minute arc can be further divided into 60equal arcs, each called a one second arc. This then leads to angle mea-sures of one minute, denoted
�
and one second, denoted � �
:
� � � � minutes� � � � seconds.

13.3. DEGREE METHOD 173
PSfrag replacements
-axis
-axis
-axis
� ���
� �
�� � �
� � � �
�� � �
� � �
Figure 13.5: Examples of common angles.
For example, an angle of measure� � 5 degrees 23 minutes 18 sec-
onds is usually denoted� � � �
� � �
. We could express this as a decimal ofdegrees:� � � �
� � � �� �� � � � � � � � � � � � In degrees!
� ��� � � � �
As another example, suppose we have an angle with measure� � � � � � � and
we wish to convert this into degree/minute/second units. First, since� � � � � � � � � � � � � � � � � � , we need to write � �� � � � in minutes by the calculation:
� �� � � degree � � � minutes
degree��� � �� � �
�
This tells us that� � � � � � � � � � � � � �� � � � � � � � � �
� � �� � �
. Now we need to write� �� � �
in seconds via the calculation:
� �� � minutes � � � seconds/minute � � � � � �
�
In other words,� � � � � � � � � � � � � � � � � � �
.Degree measurement of an angle is very closely tied to direction in the
plane, explaining its use in map navigation. With some additional work,it is also possible to relate degree measure and lengths of circular arcs.To do this carefully, first go back to Figure 13.3 and recall the situation

174 CHAPTER 13. MEASURING AN ANGLE
where an arc� � � � � � � is subtended by the central angle � ��� � . In this
situation, the arc length of� � � � � � � , commonly denoted by the letter , is
the distance from A to B computed along the circular arc; keep in mind,this is NOT the same as the straight line distance between the points Aand B.
For example, consider the six angles pictured above, of measures� � � ,
� � � , � � � � , � � � , � � � � , and � � . If the circle is of radius � and we want tocompute the lengths of the arcs subtended by these six angles, then thiscan be done using the formula for the circumference of a circle (on theback of this text) and the following general principle:
Important Fact 13.3.1.
(length of a part) � (fraction of the part) � (length of the whole)
For example, the circumference of the entire circle of radius � is ����� ;this is the “length of the whole” in the general principle. The arc sub-tended by a 90
�angle is
� �� � � � �� of the entire circumference; this is the“fraction of the part” in the general principle. The boxed formula implies:
� arc length of the 90�
arc ��� � ����� � ���
� �PSfrag replacements
-axis
-axis
-axis
� � distancealong the arc
�degrees
���
Figure 13.6: The definitionof arc length.
Similarly, a � � � angle subtends an arc of length � ��� ,a � � angle subtends an arc of length � � � � � � � � ��� � � �
� �� ,etc. In general, we arrive at this formula:
Important Fact 13.3.2 (Arc length in degrees). Startwith a central angle of measure
�degrees inside a circle of
radius � . Then this angle will subtend an arc of length
�� ��� � � � � �
13.4 Radian Method
The key to understanding degree measurement was the description of a“basic wedge” which contained an interior angle of measure
�; this was
straightforward and familiar to all of us. Once this was done, we couldproceed to measure any angle in degrees and compute arc lengths as inFact 13.3.2. However, the formula for the length of an arc subtended byan angle measured in degrees is sort of cumbersome, involving the curi-ous factor
� �� � � . Our next goal is to introduce an alternate angle measure-ment scheme called radian measure that begins with a different “basicwedge”. As will become apparent, a big selling point of radian measure isthat arc length calculations become easy.

13.4. RADIAN METHOD 175
PSfrag replacements
-axis
-axis
-axis
circle�
� � � ���this angle isDEFINED tohavemeasure 1radian
equilateralwedge
��
�
��
�
Figure 13.7: Constructing an equilateral wedge.
As before, begin with a circle� � of radius � . Construct an equilateral
wedge with all three sides of equal length � ; see Figure 13.7. We definethe measure of the interior angle of this wedge to be 1 radian.
Once we have defined an angle of measure 1 radian, we can define anangle of measure 2 radians by putting together two equilateral wedges.Likewise, an angle of measure �� radian is obtained by symmetrically di-viding an equilateral wedge in half, etc.
Reasoning in this way, we can piece together equilateral wedges orfractions of such to compute the radian measure of any angle. It is im-portant to notice an important relationship between the radian measureof an angle and arc length calculations. In the five angles pictured above,1 radian, 2 radian, 3 radian, �� radian and �� radian, the length of the arcssubtended by these angles
�are � , � � , � , �� � , and �� � . In other words, a
pattern emerges that gives a very simple relationship between the length of an arc and the radian measure of the subtended angle:
PSfrag replacements
-axis
-axis
-axis
� � distancealong the arc
�radians
� �
Figure 13.9: Defining arclength when angles are mea-
sured in radians.
Important Fact 13.4.1 (Arc length in radians).Start with a central angle of measure
�radians inside a
circle of radius � . Then this angle will subtend an arc oflength � � � .
These remarks allow us to summarize the definition ofthe radian measure
�of � ��� � inside a circle of radius �
by the formula:
� �� �� if angle is swept counterclockwise� �� if angle is swept clockwise

176 CHAPTER 13. MEASURING AN ANGLE
PSfrag replacements
-axis
-axis
-axis
1 radian���
2 radians��� 3 radians
���
�� radian���
�� radian���
r
rrr
r
r
rr
r
r
r
2r3r
�� ��
Figure 13.8: Measuring angles in radians.PSfrag replacements
� -axis
� -axis-axis
length ofarc
� � � � � ���
radian��
circle radius
Figure 13.10: Arc length af-ter imposing a coordinate
system.
The units of�
are sometimes abbreviated as rad. It isimportant to appreciate the role of the radius of the circle� � when using radian measure of an angle: An angle ofradian measure
�will subtend an arc of length
� � �on the
unit circle. In other words, radian measure of angles isexactly the same as arc length on the unit circle; wecouldn’t hope for a better connection!
The difficulty with radian measure versus degree mea-sure is really one of familiarity. Let’s view a few commonangles in radian measure. It is easiest to start with thecase of angles in central standard position within the unitcircle. Examples of basic angles would be fractional parts
of one complete revolution around the unit circle; for example, ��� revo-
lution, �� revolution, �� revolution, �� revolution, �� revolution and �� revo-lution. One revolution around the unit circle describes an arc of length��� and so the subtended angle (1 revolution) is ��� radians. We can noweasily find the radian measure of these six angles. For example, �
�� rev-
olution would describe an angle of measure���� � ��� rad=
�� rad. Similarly,
the other five angles pictured below have measures� � rad,
� � rad,� � rad, �
rad and � �� rad.All of these examples have positive radian measure. For an angle with
negative radian measure, such as� � � � � radians, we would locate �
by rotating �� revolution clockwise, etc. From these calculations and our

13.5. AREAS OF WEDGES 177
PSfrag replacements
-axis
-axis
-axis ��
� � � �
��
� � ���� � revolution � revolution �� revolution
�� revolution �� revolution�� revolution
Figure 13.11: Common angles measured in radians.
previous examples of degree measure we find that
� � degrees ��� radians � (13.1)
Solving this equation for degrees or radians will provide conversionformulas relating the two types of angle measurement. The formulaalso helps explain the origin of the curious conversion factor
��
� � �� �� � �in Fact 13.3.2.
13.5 Areas of Wedges
The beauty of radian measure is that it is rigged so that we can easilycompute lengths of arcs and areas of circular sectors (i.e. “pie-shapedregions”). This is a key reason why we will almost always prefer to workwith radian measure.
Example 13.5.1. If a 16 inch pizza is cut into 12 equal slices, what is thearea of a single slice?
This can be solved using a general principle:
(Area of a part) � (area of the whole) � (fraction of the part)

178 CHAPTER 13. MEASURING AN ANGLE
So, for our pizza:
(area one slice) � (area whole pie) � (fraction of pie)
� � � � � �� � �
� � � �PSfrag replacements
-axis
-axis
-axis
�
�
��
� ��
Figure 13.12: Finding thearea of a “pie shaped wedge”.
Let’s apply the same reasoning to find the area of acircular sector. We know the area of the circular discbounded by a circle of radius � is ��� � . Let
�� be the “pie
shaped wedge” cut out by an angle � ��� � with positivemeasure
�radians. Using the above principle
area� �� � � �
area of disc bounded by� � �
� �portion of disc accounted for by
�� �
� � ��� � �� �
��� � � � �
� � �
For example, if � � in. and� � � � rad, then the area of
the pie shaped wedge is�
� � sq. in.
Important Fact 13.5.2 (Wedge area). Start with a central angle withpositive measure
�radians inside a circle of radius � . The area of the “pie
shaped region” bounded by the angle is �� � � � .
Example 13.5.3. A water drip irrigation arm 1200 feet long rotates arounda pivot � once every 12 hours. How much area is covered by the arm inone hour? in 37 minutes? How much time is required to drip irrigate 1000square feet?
Solution. The irrigation arm will complete one revolution in 12 hours.The angle swept out by one complete revolution is ��� radians, so after �hours the arm sweeps out an angle
� � ��� given by
� � ��� � ��� radians � hours
� � hours � � � � radians �
Consequently, by Important Fact 13.5.2 the area �� ��� of the irrigated
region after � hours is
�� ��� �
�� ��� � � � � � ��� �
�� ��� � � � � � � � ��� ��� � � �� square feet.
After 1 hour, the irrigated area is �� � � ��� ��� � � � � � � � � � sq. ft. Like-
wise, after 37 minutes, which is ���� � hours, the area of the irrigated regionis �
� ���� � � � ��� � � � � � � ���� � � � � � � � � � square feet. To answer the final ques-tion, we need to solve the equation �
� ��� � � � � ; i.e., ��� � � � � ��� � � � � , so
� ��
��� � hours � �
� � � � secondshour � � � � ��� seconds.

13.5. AREAS OF WEDGES 179
13.5.1 Chord Approximation
Our ability to compute arc lengths can be used as an estimating tool fordistances between two points. Let’s return to the situation posed at thebeginning of this section: Cosmo the dog, tied by a 20 foot long tetherto a post in the ground, begins at location
�and walks counterclockwise
to location � . Furthermore, let’s suppose you are standing at the centerof the circle determined by the tether and you measure the angle from
�
to � to be� �
; see the left-hand figure. Because the angle is small, noticethat the straight line distance � from
�to � is approximately the same as
the arc length subtended by the angle � � � � ; the right-hand picture inFigure 13.13 is a blow-up:
PSfrag replacements
-axis
-axis
-axis
� �20 feet
20 feet
�� �
�
��
� �
Figure 13.13: Using the arc length � to approximate the chord � .
Example 13.5.4. Estimate the distance from�
to � .
Solution. We first convert the angle into radian measure via (13.1):� � �
� � � � � radians. By Fact 13.3.2, the arc has length � � � � feet � ��� � � � inches.This is approximately equal to the distance from
�to � , since the angle
is small.PSfrag replacements
-axis
-axis
-axis
chord
�
�
�
�
Figure 13.14: Chord ap-proximation.
We call a line segment connecting two points on a cir-cle a chord of the circle. The above example illustratesa general principal for approximating the length of anychord. As the size of the angle decreases, the accuracy ofthe arc length approximation will improve.
Important Fact 13.5.5 (Chord Approximation). In Fig-ure 13.14, if the central angle is small, then � � � �
�.

180 CHAPTER 13. MEASURING AN ANGLE
13.6 Great Circle Navigation
A basic problem is to find the shortest route between any two locationson the earth. We will review how to coordinatize the surface of the earthand recall the fact that the shortest path between two points is measuredalong a great circle.
View the earth as a sphere of radius � � � � � � miles. We could slicethe earth with a two-dimensional plane
� � which is both perpendicularto a line connecting the North and South poles and passes through thecenter of the earth. Of course, the resulting intersection will trace out acircle of radius � � � � � � miles on the surface of the earth, which we callthe equator. We call the plane
� � the equatorial plane. Slicing the earthwith any other plane
�parallel to
� � , we can consider the right trianglepictured below and the angle
�:
PSfrag replacements
-axis
-axis
-axis
North PoleNorth Pole
�� ��
South PoleSouth Pole
equatorequator
center of earthcenter of earth
equatorial plane
��
line of latitude
�
�
� �
� � � �� �
Figure 13.15: Measuring latitude.
Essentially two cases arise, depending on whether or not the plane�
is above or below the equatorial plane. The plane�
slices the surface ofthe earth in a circle, which we call a line of latitude. This terminologyis somewhat incorrect, since these lines of latitude are actually circleson the surface of the earth, but the terminology is by now standard. De-pending on whether this line of latitude lies above or below the equatorialplane, we refer to it as the
� �North line of latitude (denoted
� �N) or the
� �South line of latitude (denoted
� �S). Notice, the radius � of a line of
latitude can vary from a maximum of � � � � miles (in the case of� � � � ),
to a minimum of 0 miles, (when� � � � � ). When � � � , we are at the North
or South poles on the earth.In a similar spirit, we could imagine slicing the earth with a plane �
which is perpendicular to the equatorial plane and passes through thecenter of the earth. The resulting intersection will trace out a circle ofradius � � � � miles on the surface of the earth, which is called a line oflongitude. Half of a line of longitude from the North Pole to the SouthPole is called a meridian. We distinguish one such meridian; the onewhich passes through Greenwich, England as the Greenwich meridian.

13.6. GREAT CIRCLE NAVIGATION 181
Longitudes are measured using angles East or West of Greenwich. Pic-tured below, the longitude of � is
�. Because
�is east of Greenwich,
�
measures longitude East, typically written� �
E; west longitudes wouldbe denoted as
� �W. All longitudes are between � � and � � � . The meridian
which is � � � West (and � � � E) is called the International Date Line.
PSfrag replacements
-axis
-axis
-axis
Greenwich, England
Greenwichmeridian
North Pole
South Pole
�
center of earth
line of longitude
InternationalDate Line
Equator
�
Figure 13.16: The Interna-tional Date Line.
Introducing the grid of latitude and longitude lines onthe earth amounts to imposing a coordinate system. Inother words, any position on the earth can be determinedby providing the longitude and latitude of the point. Theusual convention is to list longitude first. For example,Seattle has coordinates � � � � �� � W,
� � �� � N. Since the la-bels “N and S” are attached to latitudes and the labels “Eand W” are attached to longitudes, there is no ambiguityhere. This means that Seattle is on the line of longitude � � � � �� � West of the Greenwich meridian and on the lineof latitude
� � � � � North of the equator. In the figure below, we indicate thekey angles � �
� � �� � and� � � � � � �� � by inserting the three indicated
radial line segments.PSfrag replacements
-axis
-axis
-axis
Seattle, WA
GreenwichMeridian
not great circle
not great circle
great circles
��
�
�
�
Figure 13.17: Distances along great circles.
Now that we have imposed a coordinate system on the earth, it isnatural to study the distance between two locations. A great circle of asphere is defined to be a circle lying on the sphere with the same centeras the sphere. For example, the equator and any line of longitude aregreat circles. However, lines of latitude are not great circles (except thespecial case of the equator). Great circles are very important becausethey are used to find the shortest distance between two points on theearth. The important fact from geometry is summarized below.

182 CHAPTER 13. MEASURING AN ANGLE
Important Fact 13.6.1 (Great Circles). The shortest distance betweentwo points on the earth is measured along a great circle connecting them.
Example 13.6.2. What is the shortest distance from the North Pole to Seat-tle, WA ?
PSfrag replacements
-axis
-axis
-axis
equator
GreenwichMeridian
�
�
�
�
�
Figure 13.18: Distance be-tween the North Pole and
Seattle, Washington.
Solution. The line of longitude � � � � �� � W is a great circleconnecting the North Pole and Seattle. So, the shortestdistance will be the arc length subtended by the angle� � � � pictured in Figure 13.18. Since the latitude ofSeattle is
� � �� � , the angle ��� � � has measure� � � � � . Since
��� � � is a right angle (i.e.,� � � ), � � � � has measure
�� �� �
.By Fact 13.4.1 and Equation 13.1,
� � � � � miles � ��� �� � � � � ��� � � � radians/degree �
� � � � � � miles �which is the shortest distance from the pole to Seattle.

13.7. EXERCISES 183
13.7 ExercisesProblem 13.1. Let � ����� be an angle of mea-sure � .
(a) Convert � � ��� � � into degrees/ min-utes/ seconds and into radians.
(b) Convert � � � � � � ��� � � into degrees and ra-dians.
(c) Convert � � �� � radian into degrees anddegrees/ minutes/ seconds.
Problem 13.2. A nautical mile is a unit of dis-tance frequently used in ocean navigation. It isdefined as the length of an arc � along a greatcircle on the earth when the subtending anglehas measure �
�� “one minute”. Assume the
radius of the earth is 3,960 miles.
(a) Find the length of one nautical mile tothe nearest 10 feet.
(b) A vessel which travels one nautical milein one hours time is said to have thespeed of one knot ; this is the usual nav-igational measure of speed. If a vessel istraveling 26 knots, what is the speed inmph (miles per hour)?
(c) If a vessel is traveling 18 mph, what isthe speed in knots?
Problem 13.3. The rear window wiper bladeon a station wagon has a length of 16 inches.The wiper blade is mounted on a ��� inch arm,! inches from the pivot point.
16"
6"
PSfrag replacements
-axis-axis
-axis
(a) If the wiper turns through an angle of����� � , how much area is swept clean?
(b) Through how much of an angle wouldthe wiper sweep if the area cleaned was10 square inches?
(c) Suppose bug � lands on the end of theblade farthest from the pivot. Assumethe wiper turns through an angle of ����� � .In one cycle (back and forth) of the wiperblade, how far has the bug traveled?
(d) Suppose bug � lands on the end of thewiper blade closest to the pivot. Assumethe wiper turns through an angle of ����� � .In one cycle of the wiper blade, how farhas the bug traveled?
(e) Suppose bug � lands on an intermediatelocation of the wiper blade. Assume thewiper turns through an angle of ����� � . Ifbug � travels 28 inches after one cycleof the wiper blade, determine the loca-tion of bug � on the wiper blade.
Problem 13.4. A water treatment facility oper-ates by dripping water from a 60 foot long armwhose end is mounted to a central pivot. Thewater then filters through a layer of charcoal.The arm rotates once every 8 minutes.
(a) Find the area of charcoal covered withwater after 1 minute.
(b) Find the area of charcoal covered withwater after 1 second.
(c) How long would it take to cover 100square feet of charcoal with water?
(d) How long would it take to cover 3245square feet of charcoal with water?
Problem 13.5. Astronomical measurementsare often made by computing the small angleformed by the extremities of a distant objectand using the estimating technique in 13.5.1.In the picture below, the full moon is shownto form an angle of ��
�when the distance indi-
cated is 248,000 miles. Estimate the diameterof the moon.
moon
earth
1/2o
248,000 miles
PSfrag replacements
-axis-axis
-axis

184 CHAPTER 13. MEASURING AN ANGLE
Problem 13.6. An aircraft is flying at thespeed of 500 mph at an elevation of 10miles above the earth, beginning at the Northpole and heading South along the Greenwichmeridian. A spy satellite is orbiting the earthat an elevation of 4800 miles above the earthin a circular orbit in the same plane as theGreenwich meridian. Miraculously, the planeand satellite always lie on the same radial linefrom the center of the earth. Assume the ra-dius of the earth is 3960 miles.
earth
satellite
plane
PSfrag replacements
-axis-axis
-axis
(a) When is the plane directly over a loca-tion with latitude
� ������� �� �
N for the firsttime?
(b) How fast is the satellite moving?
(c) When is the plane directly over the equa-tor and how far has it traveled?
(d) How far has the satellite traveled whenthe plane is directly over the equator?
Problem 13.7. Find the area of the sector of acircle of radius 11 inches if the measure � of acentral angle of this sector is:
(a) � � �� �(b) � � � � �(c) � ��� radians
(d) � � � ��! radians
(e) � � � � ��� � � � �
(f) � ���� � ��� � � � �
Problem 13.8. Matilda is planning a walkaround the perimeter of Wedge Park, which isshaped like a circular wedge, as shown below.The walk around the park is 2.1 miles, and thepark has an area of 0.25 square miles.
If � is less than 90 degrees, what is thevalue of the radius, � ?
θ
r
r
PSfrag replacements
-axis-axis
-axis
Problem 13.9. Let � � be the circle of radius6 inches centered at the origin in the � � -coordinate system. Compute the areas of theshaded regions in the picture below; the innercircle in the rightmost picture is the unit cir-cle:
6
y=x
C6
y=−x
C6
y=−(1/4)x + 2
y=x
C
PSfrag replacements
-axis-axis
-axis

Chapter 14
Measuring Circular Motion
PSfrag replacements
-axis
-axis
-axis
Cosmo movescounterclockwise,
maintaininga tight tether.
�
20 feet�
�
Figure 14.1: How fast isCosmo moving?
If Cosmo begins at location�
and walks counterclockwise,always maintaining a tight tether, how can we measureCosmo’s speed?
This is a “dynamic question” and requires that we dis-cuss ways of measuring circular motion. In contrast, ifwe take a snapshot and ask to measure the specific angle� � � � , this is a “static question”, which we answered inthe previous section.
14.1 Different ways to measureCosmo’s speed
If Cosmo starts at location�
and arrives at location � after some amountof time, we could study
� � measure � � � �time required to go from
�to � �
The funny Greek letter “ � ” on the left of side of the equation is pro-nounced “oh-meg-a”. We will refer to this as an angular speed. Typicalunits are “
�degreesminute � ”, “
�degreessecond � ”, “ � radians
minute� ”, etc. For example, if the angle
swept out by Cosmo after 8 seconds is�� � , then Cosmo’s angular speed
is � � � �8 seconds� � � �sec
� . Using (13.1), we can convert to radian units and get� � �� � rad
sec � � � radmin . This is a new example of a rate and we can ask to
find the total change, in the spirit of (1.2). If we are given � in units of“ � rad
time� ” or “
�degtime � ”, we have
� � � � �which computes the measure of the angle
�swept out after time � (i.e.
the total change in the angle). Angular speed places emphasis upon the
185

186 CHAPTER 14. MEASURING CIRCULAR MOTION
“size of the angle being swept out per unit time” by the moving object,starting from some initial position. We need to somehow indicate thedirection in which the angle is being swept out. This can be done by in-dicating “clockwise” our “counterclockwise”. Alternatively, we can adoptthe convention that the positive rotational direction is counterclockwise,then insert a minus sign to indicate rotation clockwise. For example,saying that Cosmo is moving at an angular speed of � � � � � rad
sec means heis moving clockwise
� � radsec .
Another way to study the rate of a circular motion is to count thenumber of complete circuits of the circle per unit time. This sort of ratehas the form
Number of RevolutionsUnit of Time
�we will also view this as an angular speed. If we take “minutes” to bethe preferred unit of time, we arrive at the common measurement calledrevolutions per minute, usually denoted
� � �or rev/min. For example, if
Cosmo completes one trip around the circle every 2 minutes, then Cosmois moving at a rate of �� � � �
. If instead, Cosmo completes one trip aroundthe circle every 12 seconds, then we could first express Cosmo’s speed inunits of revolutions/second as �
�� rev/second, then convert to
� � �units:�
�
revsec � � � � sec
min� � �
RPM �
As a variation, if we measure that Cosmo completed ��
of a revolution in2 minutes, then Cosmo’s angular speed is computed by�
�rev
� min�
�
RPM �
The only possible ambiguity involves the direction of revolution: the ob-ject can move clockwise or counterclockwise.
The one shortcoming of using angular speed is that we are not directlykeeping track of the distance the object is traveling. This is fairly easyto remedy. Returning to Figure 14.1, the circumference of the circle ofmotion is ��� � ��� � �
�� � feet. This is the distance traveled per revolution,
so we can now make conversions of angular speed into “distance traveledper unit time”; this is called the linear speed. If Cosmo is moving �� RPM,then he has a linear speed of
� ��
1 rev2 min � � � � � ft
rev � ����� � ftmin
�
Likewise, if Cosmo is moving��
radsec , then
� �� � rad�
sec � � rev��� rad � � � � � ft
rev � � ��� �� ftsec
�

14.2. DIFFERENT WAYS TO MEASURE CIRCULAR MOTION 187
Important Fact 14.1.1. This discussion is an example of what is usuallycalled “units analysis”. The key idea we have illustrated is how to convertbetween two different types of units:
� revmin
� converts to� �
�ft
min �14.2 Different Ways to Measure
Circular MotionThe discussion of Cosmo applies to circular motion of any object. As amatter of convention, we usually use the Greek letter � to denote angularspeed and � for linear speed. If an object is moving around a circle ofradius � at a constant rate, then we can measure it’s speed in two ways:
� The angular speed
� � “revolutions”“unit time”
or“degrees swept”
“unit time”or
“radians swept”“unit time”
�
� The linear speed
� � “distance traveled”“per unit time”
�
Important Facts 14.2.1 (Measuring and converting). We can convertbetween angular and linear speeds using these facts:
� 1 revolution = 360�
= ��� radians;
� The circumference of a circle of radius � units is ��� � units.
14.2.1 Three Key FormulasIf an object begins moving around a circle, there are a number of quan-tities we can try to relate. Some of these are “static quantities”: Takea visual “snapshot” of the situation after a certain amount of time haselapsed, then we can measure the radius, angle swept, arc length andtime elapsed. Other quantities of interest are “dynamic quantities”: Thismeans something is CHANGING with respect to time; in our case, the lin-ear speed (which measures distance traveled per unit time) and angularspeed (which measures angle swept per unit time) fall into this category.

188 CHAPTER 14. MEASURING CIRCULAR MOTION
PSfrag replacements
-axis
-axis
-axis
STATIC QUANTITIES
1. arc length �
2. angle swept in time
3. radius
4. elapsed time �
�
...take a “snapshot” after time...
DYNAMIC QUANTITIES
5. angular speed �
6. linear speed �
...see what happens per unit time...
��
��
��
Figure 14.2: Measuring linear and angular speed.
We now know two general relationships for circular motion:
(i) ��� � , where =arclength (a linear distance), � =radius of the circularpath and
�=angle swept in RADIAN measure; this was the content
of Fact 13.4.1 on page 175.
(ii)� � � � , where
�is the measure of an angle swept, � = angular speed
and � represents time elapsed. This is really just a consequence ofunits manipulation.
Notice how the units work in these formulas. If � =20 feet and� � ��
radians, then the arc length � ��� � �� � feet= 26 feet; this is the lengthof the arc of radius 20 feet that is subtending the angle
�. If � �
rad/second and � � �seconds, then
� � radseconds � �
seconds � �
radians.If we replace “
�” in � � � of (i) with
� � � � in (ii), then we get
��� � � �This gives us a relationship between arclength (a distance) and time � .Plug in the fact that the linear speed is defined to be � � “distance” and weget
� � � �
� � �� ��� � �
All of these observations are summarized below.
Important Facts 14.2.2 (Three really useful formulas). If we measureangles
�in RADIANS and � in units of radians per unit time, we have
these three formulas:
� � � (14.1)� � � � (14.2)
� � � � (14.3)

14.2. DIFFERENT WAYS TO MEASURE CIRCULAR MOTION 189
*
PSfrag replacements
-axis
-axis
-axis
pebble sticks to tread here
Figure 14.3: Where is thepebble after � seconds?
Example 14.2.3. You are riding a stationary exercise bikeand the speedometer reads a steady speed of
�� MPH
(miles per hour). If the rear wheel is 28 inches in diame-ter, determine the angular speed of a location on the reartire. A pebble becomes stuck to the tread of the rear tire.Describe the location of the pebble after 1 second and 0.1second.
Solution. The tires will be rotating in a counterclockwisedirection and the radius � � �� � � �
�inches. The other given quantity,
“40 MPH”, involves miles, so we need to decide which common units towork with. Either will work, but since the problem is focused on thewheel, we will utilize inches.
If the speedometer reads 40 MPH, this is the linear speed of a specifiedlocation on the rear tire. We need to convert this into an angular speed,using unit conversion formulas. First, the linear speed of the wheel is
� �� �� miles
hr � � � � � � ftmile � �
� inft � �
1 hr60 min � �
min60 sec �
� � � � insec
�
Now, the angular speed � of the wheel will be
� �� � � inches
second
� � �� � inches
revolution
� � revolutionsecond
��� � RPM
It is then an easy matter to convert this to
� ��� revolution
second � � � � degreesrevolution �
� � � � � � degreessecond
�
If the pebble begins at the “6 o’clock” position (the place the tire touchesthe ground on the wheel), then after second the pebble will go through �revolutions, so will be in the “ � o’clock” position again. After � � seconds,the pebble will go through� � rev
sec� � � � sec � � � � � rev
� � � � � rev �� � � deg
rev �� � � � � �

190 CHAPTER 14. MEASURING CIRCULAR MOTION
Keeping in mind that the rotation is counterclockwise, we can view thelocation of the pebble after 0.1 seconds as pictured below:
*
*
PSfrag replacements
-axis
-axis
-axisafter 0.1 second
pebble sticks to tread in 6 o’clock position
� � � � counterclock-wise rotation
startshere
located here attime
� � � � sec
Figure 14.4: Computing the pebble’s position after � � � � sec.
We solved the previous problem using the “unit conversion method”.There is an alternate approach available, which uses one of the formulasin Fact 14.2.2. Here is how you could proceed: First, as above, we knowthe linear speed is � � � � � in/sec. Using the “� � � � ” formula, we have� � � in
sec� �
��
in �� � � � � � � rad
sec�
Notice how the units worked out in the calculation: the “time” unit comesfrom � and the “angular” unit will always be radians. As a comparisonwith the solution above, we can convert � into RPM units:
� �� � � � � � rad
sec � � rev��� rad �
� � revsec
�
All of the problems in this section can be worked using either the “unitconversion method” or the “� � � � method”.
14.3 Music Listening TechnologyThe technology of reproducing music has gone through a revolution sincethe early 1980’s. The “old” stereo long playing record (the LP ) and the

14.3. MUSIC LISTENING TECHNOLOGY 191
“new” digital compact disc (the CD ) are two methods of storing musicaldata for later reproduction in a home stereo system. These two technolo-gies adopt different perspectives as to which notion of circular speed isbest to work with.
Long playing stereo records are thin vinyl plastic discs of radius 6inches onto which small spiral grooves are etched into the surface; wecan approximately view this groove as a circle. The LP is placed on aflat 12 inch diameter platter which turns at a constant angular speed of� �� RPM. An arm on a pivot (called the tone arm) has a needle mountedon the end (called the cartridge), which is placed in the groove on theoutside edge of the record. Because the grooves wobble microscopicallyfrom side-to-side, the needle will mimic this motion. In turn, this setsa magnet (mounted on the opposite end of the needle) into motion. Thismoving magnet sits inside a coil of wire, causing a small varying voltage;the electric signal is then fed to your stereo, amplified and passed ontoyour speakers, reproducing music!
PSfrag replacements
-axis
-axis
-axis tonearm
needle
LP turning at � � �� RPMamp
speakers
Figure 14.5: Reproducing music using analogue technology.
This is known as analogue technology and is based upon the idea ofmaintaining a constant angular speed of � �� RPM for the storage medium(our � � ). (Older analogue technologies used
� �RPM and
� � RPM records.However, � �� RPM became the consumer standard for stereo music.)With an LP, the beginning of the record (the lead-in groove) would beon the outermost edge of the record and the end of the record (the exitgroove) would be close to the center. Placing the needle in the lead-ingroove, the needle gradually works its way to the exit groove. However,whereas the angular speed of the LP is a constant � �� RPM, the linearspeed at the needle can vary quite a bit, depending on the needle loca-tion.

192 CHAPTER 14. MEASURING CIRCULAR MOTION
16
PSfrag replacements
-axis
-axis
-axis
Figure 14.6: Lead-in andexit grooves.
Example 14.3.1 (Analogue LP’s). The “lead-in groove” is6 inches from the center of an LP, while the “exit groove” is1 inch from the center. What is the linear speed (MPH) ofthe needle in the “lead-in groove”? What is the linear speed(MPH) of the needle in the “exit groove”? Find the locationof the needle if the linear speed is 1 MPH.
Solution. This is a straightforward application of Fact 14.2.1.Let �
� (resp. �
� ) be the linear speed at the lead in groove (resp. exitgroove); the subscript keeps track of the needle radial location. Since thegroove is approximately a circle,
�
� �� � rev
min � �� � � � � inches
rev �� � � � in
min
� � � � � inmin
� � � � minhour
�� � � � � ftmile
� � � inft�
� � � MPH
Similarly, �
� � � � � MPH. To answer the remaining question, let � be theradial distance from the center of the � � to the needle location on therecord. If � � � MPH:
milehour
� � ��
� � revmin � �
� � � inrev � � � � min
hr � � ft � in � �
mile� � � � ft �So, when the needle is � � �
����
inches from the center, the linear speed is1 MPH.
PSfrag replacements
-axis
-axis
-axis
laserlaser support armmoves back and forth
spinning CD
Figure 14.7: Reproduc-ing music using digital
technology.
In the early 1980’s, a new method of storing and repro-ducing music was introduced; this medium is called thedigital compact disc, referred to as a CD for short. This isa thin plastic disc of diameter 4.5 inches, which appearsto the naked eye to have a shiny silver coating on one side.Upon microscopic examination one would find concentriccircles of pits in the silver coating. This disc is placed ina CD player, which spins the disc. A laser located abovethe spinning disc will project onto the spinning disc. Thepits in the silver coating will cause the reflected laser lightto vary in intensity. A sensor detects this variation, con-verting it to a digital signal (the analogue to digital or ADconversion). This is fed into a digital to analogue or DAconversion device, which sends a signal to your stereo,again producing music.

14.4. BELT AND WHEEL PROBLEMS 193
The technology of� � � differs from that of � � � in two crucial ways.
First, the circular motion of the spinning CD is controlled so that thetarget on the disc below the laser is always moving at a constant linearspeed of � � meters
sec � � � � � inchesminute . Secondly, the beginning location of the
laser will be on the inside portion of the disc, working its way outward tothe end. In this context, it makes sense to study how the angular speedof the CD is changing, as the laser position changes.
PSfrag replacements
-axis
-axis
-axis
��� �
� � �
Start of CD End of CD
Figure 14.8: Computing theangular speed of a CD.
Example 14.3.2 (Digital CD’s). What is the angularspeed (in RPM) of a CD if the laser is at the beginning, lo-cated �� inches from the center of the disc ? What is theangular speed (in RPM) of a CD if the laser is at the end, lo-cated � inches from the center of the disc ? Find the locationof the laser if the angular speed is 350 RPM.
Solution. This is an application of Fact 14.2.1. Let � � � � bethe angular speed at the start and � � the angular speedat the end of the CD ; the subscript is keeping track of thelaser distance from the CD center.
� � �� � � � inches/min �� � � � � � inches/rev � � � � � � � RPM
� � � � � � � � inches/min �� � � � � � � � � inches/rev � � � � � � RPM
To answer the remaining question, let � be the radial distance fromthe center of the CD to the laser location on the CD. If the angular speed
� � at this location is � � RPM, we have the equation � � RPM � � �� � � � � � inches
minute�� � ��� inches
revolution�
� � � � inches � � �So, when the laser is 1.289 inches from the center, the CD is moving � � � � �
.
14.4 Belt and Wheel ProblemsThe industrial revolution spawned a number of elaborate machines in-volving systems of belts and wheels. Computing the speed of variousbelts and wheels in such a system may seem complicated at first glance.The situation can range from a simple system of two wheels with a beltconnecting them, to more elaborate designs. We call problems of this sortbelt and wheel problems, or more generally, connected wheel problems.Solving problems of this type always uses the same strategy, which wewill first highlight by way of an example.

194 CHAPTER 14. MEASURING CIRCULAR MOTION
PSfrag replacements
-axis
-axis
-axis
� �� �
�
�
�
�
�
�
Figure 14.9: Two typical connected wheel scenarios.
PSfrag replacements
-axis
-axis
-axis
front sprocket radius�
5 inches
rear sprocket radius�
2 inches
(a) A stationary exercisebike.
PSfrag replacements
-axis
-axis
-axis
radius� �
14 inches
radius � �2 inchesradius
� �5 inches
���
(b) A model of the bike’sconnected wheels.
Figure 14.10: Visualizingthe connected wheels of an
exercise bike.
Example 14.4.1. You are riding a stationary exercise bike.Assume the rear wheel is 28 inches in diameter, the rearsprocket has radius 2 inches and the front sprocket hasradius 5 inches. How many revolutions per minute of thefront sprocket produces a forward speed of 40 MPH on thebike (miles per hour)?
Solution. There are 3 wheels involved with a belt (the bicy-cle chain) connecting two of the wheels. In this problem,we are provided with the linear speed of wheel � (which is40 MPH) and we need to find the angular speed of wheel�
=front sprocket.Denote by � � , � � , and � � the linear speeds of each of
the wheels � , � , and�, respectively. Likewise, let � � , � � ,
and � � denote the angular speeds of each of the wheels � ,� , and
�, respectively. In addition, the chain connecting
the wheels � and�
will have a linear speed, which we willdenote by � � � � � � . The strategy is broken into a sequenceof steps which leads us from the known linear speed � � tothe angular speed � � of wheel
�:
� Step 1: Given � � , find � � . Use the fact � ��� � �� � .
� Step 2: Observe � � � � � ; this is because the wheeland rear sprocket are both rigidly mounted on acommon axis of rotation.
� Step 3: Given � � , find � � . Use the fact � � ��� � � � ��� � � ���� � �� � � � � .
� Step 4: Observe � � � � � � � � � � � � ; this is because the chain is directlyconnecting the two sprockets and assumed not to slip.
� Step 5: Given � � , find � � . Use the fact � � � � �� � � � �� � � � � �� � � � � � � �

14.4. BELT AND WHEEL PROBLEMS 195
Saying that the speedometer reads 40 MPH is the same as sayingthat the linear speed of a location on the rear wheel is � � �
�� MPH.
Converting this into angular speed was carried out in our solution toExample 14.2.3 above; we found that � � �
�� � RPM. This completes
Step 1 and so by Step 2, � � � � � ��� � RPM. For Step 3, we convert
� � ��� � RPM into linear speed following Fact 14.2.1:
� � �� �� � revolution
minute � � � � � � � � � inchesrevolution �
� � � � � inchesminute
�
By Step 4, conclude that the linear speed of wheel�
is � � � � ��� � inches/min.Finally, to carry out Step 5, we convert the linear speed into angularspeed:
� � � � � � � � inchesmin
�� � ��� � � inchesrev
�� � � RPM� � � rev
sec�
In conclusion, the bike rider must pedal the front sprocket at the rate of � � revsec.
This example indicates the basic strategy used in all belt/wheel prob-lems.
Important Facts 14.4.2 (Belt and Wheel Strategy). Three basic factsare used in all such problems:
� Using “unit conversion” or Fact 14.2.2 allows us to go from linearspeed � to angular speed � , and vice versa.
� If two wheels are fastened rigidly to a common axle, then they havethe same angular speed. (Caution: two wheels fastened to a commonaxle typically do not have the same linear speed!)
� If two wheels are connected by a belt (or chain), the linear speed ofthe belt coincides with the linear speed of each wheel.

196 CHAPTER 14. MEASURING CIRCULAR MOTION
14.5 ExercisesProblem 14.1. An irrigation drip arm is � � feetlong and pivots about a center one revolutioneach hour. A “drip hole” � is located � � feetfrom the pivot point.
(a) What is the linear speed of � in units offeethour ,
feetminute , feet
second , and inchessecond .
(b) What is the required drip rate (in dripssecond )
if we want at least 4 drips for every 1inch � travels. (The drip rate must be acounting number; i.e. ��� � � � � � �� � � )
(c) Suppose ��� drips � � cc (cubic centime-ter). How many liters flow from � after�� minutes, assuming the drip rate com-puted in b.? ( � liter � ��� ����� cc)
(d) How much water flows from � after thearm has made � complete revolutions(assuming the drip rate computed in b.)?
Problem 14.2. The restaurant in the SpaceNeedle in Seattle rotates at the rate of one rev-olution per hour.
(a) Through how many radians does it turnin 100 minutes?
(b) How long does it take the restaurant torotate through 4 radians?
(c) How far does a person sitting by the win-dow move in 100 minutes if the radius ofthe restaurant is 21 meters?
Problem 14.3. You are riding a bicycle alonga level road. Assume each wheel is 26 inchesin diameter, the rear sprocket has radius 3inches and the front sprocket has radius 7inches. How many revolutions per minuteof the front sprocket produces a speed of 35mph?
Problem 14.4. Answer the following angularspeed questions.
(a) A wheel of radius 22 ft. is rotating 11RPM counterclockwise. Considering apoint on the rim of the rotating wheel,what is the angular speed � in rad/secand the linear speed � in ft/sec?
(b) A wheel of radius 8 in. is rotating�� � /sec. What is the linear speed � , theangular speed in RPM and the angularspeed in rad/sec?
(c) You are standing on the equator of theearth (radius 3960 miles). What is yourlinear and angular speed?
(d) An auto tire has radius 12 inches. If youare driving 65 mph, what is the angularspeed in rad/sec and the angular speedin RPM?
Problem 14.5. Lee is running around theperimeter of a circular track at a rate of 10ft/sec. The track has a radius of 100 yards.After 10 seconds, Lee turns and runs along aradial line to the center of the circle. Once hereaches the center, he turns and runs along aradial line to his starting point on the perime-ter. Assume Lee does not slow down when hemakes these two turns.
(a) Sketch a picture of the situation.
(b) How far has Lee traveled once he returnsto his starting position?
(c) How much time will elapse during Lee’scircuit?
(d) Find the area of the pie shaped sectorenclosed by Lee’s path.
Problem 14.6. A laser video disc (LVD), wasa predecessor to the DVD. Similar to a DVD,an LVD is a thin plastic disc with a silver coat-ing on one side, but they have a diameter of 12inches. Information is read from the disc usinga laser. The
� � �is designed to spin at a con-
stant linear speed below the laser; this speedis �� � meters/sec � 2835 inches/minute. Thelaser begins $
�inch from the center of the spin-
ning disc and works it way out to the end (5.5inches from the center).
(a) Find the angular speed of the� � �
at thebeginning and end of the
� � �; i.e. when
the laser is $�
inch and inches fromthe center.
(b) Describe the location of the laser if theangular speed is 100 RPM.

14.5. EXERCISES 197
Problem 14.7. John has been hired to de-sign an exciting carnival ride. Tiff, the car-nival owner, has decided to create the worldsgreatest ferris wheel. Tiff isn’t into math; shesimply has a vision and has told John theseconstraints on her dream: (i) the wheel shouldrotate counterclockwise with an angular speedof ��� RPM; (ii) the linear speed of a rider shouldbe 200 mph; (iii) the lowest point on the rideshould be 4 feet above the level ground.
P
4 feet
12 RPM
θ
PSfrag replacements
-axis-axis
-axis
(a) Find the radius of the ferris wheel.
(b) Once the wheel is built, John suggeststhat Tiff should take the first ride. Thewheel starts turning when Tiff is at thelocation � , which makes an angle � withthe horizontal, as pictured. It takes her1.3 seconds to reach the top of the ride.Find the angle � .
(c) Poor engineering causes Tiff’s seat to flyoff in 6 seconds. Describe where Tiff islocated (an angle description) the instantshe becomes a human missile.
Problem 14.8. Michael and Aaron are on the“UL-Tossum” ride at Funworld. This is amerry-go-round of radius 20 feet which spinscounterclockwise 60 RPM. The ride is drivenby a belt connecting the outer edge of the rideto a drive wheel of radius 3 feet:
Drive wheelradius 3 ft
radius 20 ftmain ride
drive belt
PO
Michael
Aaron
PSfrag replacements
-axis-axis
-axis
(a) Assume Michael is seated on the edge ofthe ride, as pictured. What is Michael’slinear speed in mph and ft/sec?
(b) What is the angular speed of the drivewheel in RPM?
(c) Suppose Aaron is seated 16 feet from thecenter of the ride. What is the angularspeed of Aaron in RPM? What is the lin-ear speed of Aaron in ft/sec?
(d) After 0.23 seconds Michael will be lo-cated at � as pictured. What is the an-gle � � � � in degrees? What is the angle� � � � in radians? How many feet hasMichael traveled?
PO
θ
S
PSfrag replacements
-axis-axis
-axis
(e) Assume Michael has traveled 88 feetfrom the position P to a new position Q.How many seconds will this take? Whatwill be the angle swept out by Michael?
PO
Q
length of arc (PQ) is 88 ft
PSfrag replacements
-axis-axis
-axis
Problem 14.9. You are riding a bicycle along alevel road. Assume each wheel is � � inches indiameter, the rear sprocket has radius � inchesand the front sprocket has radius � inches.Suppose you are pedaling the front sprocketat the rate of �� rev
sec and your forward speed is��� mph on the bike. What is the radius of thefront sprocket?

198 CHAPTER 14. MEASURING CIRCULAR MOTION
Problem 14.10. Your car’s speedometer isgeared to accurately give your speed using acertain size tire. Suppose your car has � � 14inch diameter wheels and the height of the tireis
� � 4.5 inches.
dh
tire
wheel
PSfrag replacements
-axis-axis
-axis
(a) You buy a new set of tires with� �
inches and ��� � � inches. On a trip toSpokane, you maintain a constant speedof 65 mph, according to your speedome-ter. However, as luck would have it, youare stopped for speeding. Explain howthis could happen. What did the radargun display as your true speed?
(b) You are furious over the speeding ticketand return to the tire dealer, demand-ing new tires which are the correct size.The dealer only has “low profile tires” instock, which are
� � � inches high.If you accept these and drive away fromthe dealer with your speedometer read-ing 35 mph, how fast are you really go-ing?
Problem 14.11. You are designing a systemof wheels and belts as pictured below. Youwant wheel A to rotate 20 RPM while wheelB rotates 42 RPM. Wheel A has a radius of 6inches, wheel B has a radius of 7 inches andwheel C has a radius of 1 inch. Assume wheels� and
�are rigidly fastened to the same axle.
What is the radius � of wheel�
?
CA BD
PSfrag replacements
-axis-axis
-axis

Chapter 15
The Circular FunctionsPSfrag replacements
-axis
-axis
-axis
� ��
� �
� �
�� �
feet�
Figure 15.1: Cosmo movescounterclockwise maintain-ing a tight tether. Where’s
Cosmo?
Suppose Cosmo begins at location�
and walks in a coun-terclockwise direction, always maintaining a tight 20 ftlong tether. As Cosmo moves around the circle, how canwe describe his location at any given instant?
In one sense, we have already answered this question:The measure of � � � � � exactly pins down a location onthe circle of radius 20 feet. But, we really might prefera description of the horizontal and vertical coordinates ofCosmo; this would tie in better with the coordinate systemwe typically use. Solving this problem will require NEWfunctions, called the circular functions.
15.1 Sides and Angles of a Right Triangle
The billiard table layout.
PSfrag replacements
-axis
-axis
-axis
�ft
�ft
� � ft
�ft
findthis
location
this pocketfor thebig money
The billiard table layout
� � �
��
��
Mathmatically modeling the bank shot.
Figure 15.2: A pocket bil-liard banking problem.
Example 15.1.1. You are preparing to make your finalshot at the British Pocket Billiard World Championships.The position of your ball is as in Figure 15.2, and you mustplay the ball off the left cushion into the lower-right cornerpocket, as indicated by the dotted path. For the big money,where should you aim to hit the cushion?
Solution. This problem depends on two basic facts. First,the angles of entry and exit between the path the cushionwill be equal. Secondly, the two obvious right trianglesin this picture are similar triangles. Let represent thedistance from the bottom left corner to the impact pointof the ball’s path:
Properties of similar triangles tell us that the ratios ofcommon sides are equal: � � �
� ���� If we solve this equation
for , we obtain � � � � � � � feet.
199

200 CHAPTER 15. THE CIRCULAR FUNCTIONS
This discussion is enough to win the tourney. But, of course, thereare still other questions we can ask about this simple example: What isthe angle
�? That is going to require substantially more work; indeed the
bulk of this Chapter! It turns out, there is a lot of mathematical mileagein the idea of studying ratios of sides of right triangles. The first step,which will get the ball rolling, is to introduce new functions whose verydefinition involves relating sides and angles of right triangles.
15.2 The Trigonometric Ratios
PSfrag replacements
-axis
-axis
-axis
hypotenuse
side adjacent
side opposite�
�
��
�
�
Figure 15.3: Labeling thesides of a right triangle.
From elementary geometry, the sum of the angles of anytriangle will equal � � � . Given a right triangle
� � � �, since
one of the angles is� � � , the remaining two angles must be
acute angles; i.e., angles of measure between � � and� � � .
If we specify one of the acute angles in a right triangle� � � �
, say angle�, we can label the three sides using
this terminology. We then consider the following threeratios of side lengths, referred to as trigonometric ratios:
sin� � � def� length of side opposite
�
length of hypotenuse(15.1)
cos� � � def� length of side adjacent
�
length of hypotenuse(15.2)
tan� � � def� length of side opposite
�
length of side adjacent to� � (15.3)
For example, we have three right triangles in Figure 15.4; you canverify that the Pythagorean Theorem holds in each of the cases. In theleft-hand triangle, sin
� � � � � � , cos
� � � � ��� � , tan
� � � � �� . In the middle
triangle, sin� � ��� �� � , cos
� � � � �� � , tan� � � � . In the right-hand triangle,
sin� � � � �� , cos
� � ��� � �� , tan� � � � �� � . The symbols “sin”, “cos”, and “tan”
are abbreviations for the words sine, cosine and � ��� � � � , respectively.As we have defined them, the trigonometric ratios depend on the dimen-sions of the triangle. However, the same ratios are obtained for any righttriangle with acute angle
�. This follows from the properties of similar
triangles. Consider Figure 15.5. Notice� � � �
and� � � � are similar. If
we use� � � �
to compute cos� � � , then we find cos
� � � ��� �
��� ��. On the other
hand, if we use� � � � , we obtain cos
� � � ��� �
��� �
�. Since the ratios of com-
mon sides of similar triangles must agree, we have cos� � � �
�� �
��� ����� �
��� �
�,

15.2. THE TRIGONOMETRIC RATIOS 201
PSfrag replacements
-axis
-axis
-axis
���� �
�
���
� � � �� �
Figure 15.4: Computing trigonometric ratios for selected right triangles.
which is what we wanted to be true. The same argument can be usedto show that sin
� � � and tan� � � can be computed using any right triangle
with acute angle�.
PSfrag replacements
-axis
-axis
-axis
�
�
�
�
�
�
Figure 15.5: Applyingtrigonometric ratios to any
right triangle.
Except for some “rigged” right triangles, it is not easyto calculate the trigonometric ratios. Before the 1970’s,approximate values of sin
� � � , cos� � � , tan
� � � were listedin long tables or calculated using a slide rule. Today, ascientific calculator saves the day on these computations.Most scientific calculators will give an approximation forthe values of the trigonometric ratios. However, it is goodto keep in mind we can compute the EXACT values of thetrigonometric ratios when
� � � , �� ,
� � , � � , � � radians or,equivalently, when
� � � � , �� � , � � � , � � � , � � � .Angle
�Trigonometric Ratio
Deg Rad sin� � � cos
� � � tan� � �
� � � � ��� � �
� ��� �� �� �� � � � � � �
�� ��
� � � � � � �� ��� � � � � � � Undefined
Table 15.1: Exact Trigonometric Ratios

202 CHAPTER 15. THE CIRCULAR FUNCTIONS
Some people make a big deal of “approximate” vs. “exact” answers; wewon’t worry about it here, unless we are specifically asked for an exactanswer. However, here is something we will make a big deal about:
When computing values of cos� � � , sin
� � � , and tan� � � on your calcu-
lator, make sure you are using the correct “angle mode” when entering�
; i.e. “degrees” or “radians”.
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis
For example, if� �
�, then cos
�� � � � � � � � � , sin
�� � � � ��� � � , and
tan�� ��� � � � � � . In contrast, if
� � radians, then cos� ��� � � � � � ,
sin� � � � � �
��, and tan
� � � �
��� � �.
15.3 Applications
PSfrag replacements
-axis
-axis
-axis
�
�sin
� � �
�cos
� � �
� tan� � �
�
��
Figure 15.6: What do theseratios mean?
When confronted with a situation involving a right trian-gle where the measure of one acute angle
�and one side
are known, we can solve for the remaining sides using theappropriate trigonometric ratios. Here is the key pictureto keep in mind:
Important Facts 15.3.1 (Trigonometric ratios).Given a right triangle, the trigonometric ratios relate thelengths of the sides as shown in Figure 15.6.
Example 15.3.2. To measure the distance across a river for a new bridge,surveyors placed poles at locations � , � and
�. The length
�� �
� � � � feetand the measure of the angle � � � �
is � � �
. Find the distance to span theriver. If the measurement of the angle � � � �
is only accurate within � � �
,find the possible error in
�� � �
.
A
PSfrag replacements
-axis
-axis
-axis
�
��
� � �� � � � ���
Figure 15.7: The distancespanning a river.
Solution. The trigonometric ratio relating these two sideswould be the tangent and we can convert
�into decimal
form, arriving at:
tan� � � � � � tan
� �� � � � �� � ��� �
� � � � �
therefore � � � � � � feet �
This tells us that the bridge needs to span a gap of60.8 feet. If the measurement of the angle was in error by � � �
, thentan
� � ��� � � � tan� ����� � � � � � � � � � and the span is 60.88 ft. On the
other hand, if the measurement of the angle was in error by � � �
, thentan
� � � � � � tan� � ����� � � � � � � � � � � and the span is 60.72 ft.

15.3. APPLICATIONS 203
������������������������������������
PSfrag replacements
-axis
-axis
-axis
�� � � � ft
��
��
sealevel
Figure 15.8: Flying toward amountain.
Example 15.3.3. A plane is flying 2000 feet above sealevel toward a mountain. The pilot observes the top of themountain to be � � above the horizontal, then immediatelyflies the plane at an angle of ��� � above horizontal. Theairspeed of the plane is 100 mph. After 5 minutes, theplane is directly above the top of the mountain. How highis the plane above the top of the mountain (when it passesover)? What is the height of the mountain?
Solution. We can compute the hypotenuse of�
� � � by us-ing the speed and time information about the plane:
� � � � � � � � mph � ��� minutes � � hour ��� � minutes � � � � miles �
The definitions of the trigonometric ratios show:
�� �� � � � sin
� ��� � � ��� � � � � miles, and
� � �� � � � cos
� ��� � � � � � � miles �
With this data, we can now find�� ��:
�� �� � � � �
�tan
� � � � ��� � � � � miles �
The height of the plane above the peak is�� �� � �
� �� � � � �
� ��� � � � � � � � � � � �� ������ miles � ��� � feet. The elevation of the peak above sea level isgiven by: Peak elevation � plane altitude �
�� �� � �
� � � � �� �� � � ��� � � �� � � � � � � ��� � � � � ���
� � � � feet.
����������������
PSfrag replacements
-axis
-axis
-axis
��
� ��
�
��canyon
� � � ft
Figure 15.9: Finding thewidth of a canyon.
Example 15.3.4. A Forest Service helicopter needs to de-termine the width of a deep canyon. While hovering, theymeasure the angle ��
�� � at position � (see picture), then
descend 400 feet to position � and make two measure-ments of � � � (the measure of ��� � � ), � � � � (the mea-sure of � � � � ). Determine the width of the canyon to thenearest foot.
Solution. We will need to exploit three right triangles inthe picture:
� � � � ,� � � � , and
� � � � . Our goal is to compute�� � � �� � � � � � � � � , which suggests more than one right triangle will come into
play.

204 CHAPTER 15. THE CIRCULAR FUNCTIONS
The first step is to use� � � � and
� � � � to obtain a system of twoequations and two unknowns involving some of the side lengths; we willthen solve the system. From the definitions of the trigonometric ratios,� � � � � � � � � � � � � � � tan
� � � � �� � � � � �� � �
tan��� � � �
Plugging the second equation into the first and rearranging we get
�� � � �
�� � tan
� � � � �tan
��� � ��� tan� � � � � � � ��� � feet �
Plugging this back into the second equation of the system gives� � � � � � ��� � � tan
��� � � ��� � � � feet �
The next step is to relate� � � � and
� � � � , which can now be donein an effective way using the calculations above. Notice that the measureof � � � � is � � ��
�� � . We have
� � � � � �� � �
tan� � � � � � � ��� � � tan
� � � � � � � � � feet �
As noted above,�� � � � � � � � � � � � � � � � � � � � � � � � ��� � feet is the width
of the canyon.
15.4 Circular FunctionsPSfrag replacements
-axis
-axis
-axis � � �� � � �
� �
��
��
�
Figure 15.10: Cosmo on acircular path.
If Cosmo is located somewhere in the first quadrant ofFigure 15.1, represented by the location � , we can use thetrigonometric ratios to describe his coordinates. Imposethe indicated � -coordinate system with origin at � andextract the pictured right triangle with vertices at � and
� . The radius is 20 ft. and applying Fact 15.3.1 gives
� � � � � � � � ��� cos� � � � ��� sin
� � � � �Unfortunately, we run into a snag if we allow Cosmo towander into the second, third or fourth quadrant, sincethen the angle
�is no longer acute.

15.4. CIRCULAR FUNCTIONS 205
15.4.1 Are the trigonometric ratios functions?
PSfrag replacements
-axis
-axis
-axis
�
��
�
radius�� .
�
�
A unit circle with
Figure 15.11: Coordinatesof points on the unit circle.
Recall that sin� � � , cos
� � � , and tan� � � are defined for acute
angles�
inside a right triangle. We would like to say thatthese three equations actually define functions where thevariable is an angle
�. Having said this, it is natural to ask
if these three equations can be extended to be defined forANY angle
�. For example, we need to explain how sin � � �� �is defined.
To start, we begin with the unit circle pictured in the � -coordinate system. Let
� � � � � � be the angle in stan-dard central position shown in Figure 15.11. If
�is pos-
itive (resp. negative), we adopt the convention that�
isswept out by counterclockwise (resp. clockwise) rotationof the initial side � �
. The objective is to find the coordinates of the point� in this figure. Notice that each coordinate of � (the -coordinate andthe � -coordinate) will depend on the given angle
�. For this reason, we
need to introduce two new functions involving the variable�.
��������������������������������������������������������
���������������
���������������
PSfrag replacements
-axis
-axis
-axis
Michaelstarts here
� �� � � � � ���
����kilometer
Figure 15.12: A circulardriving track.
Definition 15.4.1. Let�
be an angle in standard centralposition inside the unit circle, as in Figure 15.11. This angledetermines a point � on the unit circle. Define two newfunctions, cos
� � � and sin� � � , on the domain of all
�values
as follows:
cos� � � def� horizontal -coordinate of � on unit circle
sin� � � def� vertical � -coordinate of � on unit circle �
We refer to sin� � � and cos
� � � as the basic circular func-tions. Keep in mind that these functions have variableswhich are angles (either in degree or radian measure). These functionswill be on your calculator. Again, BE CAREFUL to check the angle modesetting on your calculator (“degrees” or “radians”) before doing a calcula-tion.
PSfrag replacements
-axis
-axis
-axis
� -axis
� -axis
�� � �� �� � � � � � �
� � � � �������
� � �
starts hereMichael
Figure 15.13: ModelingMichael’s location.
Example 15.4.2. Michael is test driving a vehicle counter-clockwise around a desert test track which is circular ofradius kilometer. He starts at the location pictured, trav-eling � � � � � rad
sec . Impose coordinates as pictured. Where isMichael located (in � -coordinates) after � seconds?
Solution. Let� � ��� be the point on the circle of motion rep-
resenting Michael’s location after � seconds and� � ��� the
angle swept out the by Michael after � seconds. Since weare given the angular speed, we get
� � ��� � � � � � � � radians �

206 CHAPTER 15. THE CIRCULAR FUNCTIONS
Since the angle� � ��� is in central standard position, we get
� � ��� � �cos
� � � ��� � � sin� � � ��� � � � �
cos� � ��� � � ��� � sin
� � � � � � ��� � �So, after 18 seconds Michael’s location will be
� � � � � � � � � � � � � � � � � � � .
Interpreting the coordinates of the point � � �cos
� � �� sin� � ��� in Fig-
ure 15.11 only works if the angle�
is viewed in central standard po-sition. You must do some additional work if the angle is placed in adifferent position; see the next Example.
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis
PSfrag replacements
-axis
-axis
-axis
Angela
starts here
� � kilometer� � � � � ����������
� � � �����������
Michaelstarts here
starts here � -axis
�-axis
(a) Angela and Michael onthe same test track.
PSfrag replacements
-axis
-axis
-axis
(t)
(t)
�(t)
� � � � � ����������
� � � �����������
M(t)
A(t)
Michaelstarts here
starts here� -axis
�-axis
Angela
(b) Modeling the motion ofAngela and Michael.
Figure 15.14: Visualizingmotion on a circular track.
Example 15.4.3. Both Angela and Michael are test drivingvehicles counterclockwise around a desert test track whichis circular of radius 1 kilometer. They start at the loca-tions shown in Figure 15.14(a). Michael is traveling 0.025rad/sec and Angela is traveling 0.03 rad/sec. Impose co-ordinates as pictured. Where are the drivers located (in � -coordinates) after 18 seconds?
Solution. Let� � ��� be the point on the circle of motion rep-
resenting Michael’s location after � seconds. Likewise, let�� ��� be the point on the circle of motion representing An-
gela’s location after � seconds. Let� � ��� be the angle swept
out the by Michael and � ��� the angle swept out by Angelaafter � seconds.
Since we are given the angular speeds, we get� � ��� � � � � � � � radians, and � ��� � � � � � radians �
From the previous Example 15.4.2,� � ��� � �
cos� � ��� � � ��� � sin
� � ��� � � ��� � � and� �
� � � � � � � � � � � � � � � � � �Angela’s angle � ��� is NOT in central standard position, sowe must observe that � ��� � ��� � � ��� , where � � ��� is in cen-tral standard position: See Figure 15.14(b). We concludethat
�� ��� � �
cos� � � ��� � � sin
� � � ��� � �� �
cos� � � � � � ��� � sin
� � � � ��� ��� � �So, after 18 seconds Angela’s location will be �
� � � �� � � � � � ��� � � � � � � � .

15.4. CIRCULAR FUNCTIONS 207
15.4.2 Relating circular functions and right triangles
PSfrag replacements
-axis
-axis
-axis
unit circle (radius� � )
sin� � �
cos� � �
O
�
P
R
Figure 15.15: The point � inthe first quadrant.
If the point � on the unit circle is located in the firstquadrant, then we can compute cos
� � � and sin� � � using
trigonometric ratios. In general, it’s useful to relate righttriangles, the unit circle and the circular functions. To de-scribe this connection, given
�we place it in central stan-
dard position in the unit circle, where � � � � � �. Draw
a line through � perpendicular to the -axis, obtainingan inscribed right triangle. Such a right triangle has hy-potenuse of length 1, vertical side of length labeled � andhorizontal side of length labeled
�. There are four cases:
See Figure 15.16.
������
������������������
��������
����
PSfrag replacements
-axis
-axis
-axis
P
P
PP
bb
b b
O OOO
�
�
��
aa
a a
CASE I
RRRR
CASE II CASE III CASE IV
Figure 15.16: Possible positions of � on the unit circle.
Case I has already been discussed, arriving at cos� � � � �
and sin� � � �
� . In Case II , we can interpret cos� � � � � � � sin
� � � � � . We can reasonsimilarly in the other Cases III and IV, using Figure 15.16, and we arriveat this conclusion:
Important Facts 15.4.4 (Circular functions and triangles). View�
asin Figure 15.16 and form the pictured inscribed right triangles. Then wecan interpret cos
� � � and sin� � � in terms of these right triangles as follows:
Case I � cos� � � � � � sin
� � � � �Case II � cos
� � � � � � � sin� � � � �
Case III � cos� � � � � � � sin
� � � � � �Case IV � cos
� � � � � � sin� � � � � �

208 CHAPTER 15. THE CIRCULAR FUNCTIONS
15.5 What About Other Circles?
PSfrag replacements
-axis
-axis
-axis
T
P �
R
unit circle�
SO
Figure 15.17: Points onother circles.
What happens if we begin with a circle� � with radius �
(possibly different than 1) and want to compute the coor-dinates of points on this circle?
The circular functions can be used to answer this moregeneral question. Picture our circle
� � centered at theorigin in the same picture with unit circle
�� and the angle
�in standard central position for each circle. As pictured,
we can view� � � � � � � � � � � . If � � � � � � is our point
on the unit circle corresponding to the angle�, then the
calculation below shows how to compute coordinates ongeneral circles:
� � � �� � �� �
cos� � � � sin
� � � ��� ��
� � ��� � � � � � � � � � � � � � �� � � � � � � ��� � � � � �� � � � �� � ��� �
� � � cos� � � � � sin
� � � ��� � � �Important Fact 15.5.1. Let
� � be a circle of radius � centered at the originand
� � � � � � an angle in standard central position for this circle, as inFigure 15.17. Then the coordinates of � � � � cos
� � � � � sin� � � � .
PSfrag replacements
-axis
-axis
-axis
UT
S PQ
R
AB O
�
� -axis
�-axis ��� � � � � � � � �
circle radius� �
circle radius� �
circle radius� �
Figure 15.18: Coordinatesof points on circles.
Examples 15.5.2. Consider the picture below, with� � � � �
radians and � � � � radians. What are the coordinates ofthe labeled points?
Solution. The angle�
is in standard central position; isa central angle, but it is not in standard position. Notice,��� � � � � � � � � is an angle in standard central posi-tion which locates the same points � � � � � as the angle .Applying Definition 15.4.1 on page 205:
� � �cos
� � � � � � sin� � � � � � � � � �� � � � � � � � � � �
� � � � cos� � � � � � � sin
� � � � � � � ��� � � � � � � � �
� � � cos� � � � � � sin
� � � � � � � � � ��� � � � � � � � �� � �
cos� � � � � � � � sin
� � � � � � � � � � � � � � � � � � � � � � �� � � � cos
� � � � � � � � � sin� � � � � � � ��� � � � � � � � � � �� � � �
� � � cos� � � � � � � � sin
� � � � � � � ��� � � � � � � � � � � � � � � �

15.6. OTHER BASIC CIRCULAR FUNCTION 209
PSfrag replacements
-axis
-axis
-axis S
P� � feet R
Figure 15.19: Where isCosmo after 3 minutes?
Example 15.5.3. Suppose Cosmo begins at the position�
in the figure, walking around the circle of radius 20 feetwith an angular speed of � RPM counterclockwise. After 3minutes have elapsed, describe Cosmo’s precise location.
Solution. Cosmo has traveled � � �� revolutions. If
�is
the angle traveled after 3 minutes,� � � � � rev � � ��� radians
rev� �� � � radians �
�� � � radians. By (15.5.1), we have �
��� cos � � � � rad � � � � � � feet and � � ��� sin � � � � rad � �� � � feet. Conclude that Cosmo is located at the point
� � � � � � � � � � � � . Using (13.1),� � ��� � � � � � � � � � �
� � �;
this means that Cosmo walks counterclockwise aroundthe circle two complete revolutions, plus
� � �.
15.6 Other Basic Circular Function
Given any angle�, our constructions offer a concrete link between the
cosine and sine functions and right triangles inscribed inside the unitcircle: See Figure 15.20.
PSfrag replacements
-axis
-axis
-axis
P
P
PP
RRRR �
��
�
O OOO
CASE I CASE II CASE III CASE IV
Figure 15.20: Computing the slope of a line using the function tan � � � .
The slope of the hypotenuse of these inscribed triangles is just theslope of the line through � � . Since � � �
cos� � � � sin
� � � � and � � � � � � � :Slope � � �
� � sin� � �
cos� � �
�
this would be valid as long as cos� � � �� � . This calculation motivates a
new circular function called the tangent of�
by the rule
tan� � � � sin
� � �cos
� � � � provided cos� � � �� � �

210 CHAPTER 15. THE CIRCULAR FUNCTIONS
The only time cos� � � � � is when the corresponding point � on the
unit circle has -coordinate 0. But, this only happens at the positions� � � � and� � � � � on the unit circle, corresponding to angles of the form
� � �� � � � � �� � � �� � . These are the cases when the inscribed right tri-
angle would “degenerate” to having zero width and the line segment � �becomes vertical. In summary, we then have this general idea to keep inmind:
Important Fact 15.6.1. The slope of a line � tan� � � , where
�is the
angle the line makes with the x-axis (or any other horizontal line)
Three other commonly used circular functions come up from time totime. The cotangent function � � cot
� � � , the secant function ��� sec� � �
and the cosecant function � � csc� � � are defined by the formulas:
sec� � � def�
cos� � � � csc
� � � def� sin
� � � � cot� � � def�
tan� � � �
Just as with the tangent function, one needs to worry about the valuesof
�for which these functions are undefined (due to division by zero). We
will not need these functions in this text.
PSfrag replacements
-axis
-axis
-axis
Alaska
West
South Delta
East
Northwest
North
� � ���SeaTac
� ���
� ���
(a) The flight paths ofthree airplanes.
PSfrag replacements
-axis
-axis
-axis
W
S
E
N
Q
Northwest
Alaska
� � � � �
� � � �
� � � �Delta
Q
P
R
(b) Modeling the paths ofeach flight.
Figure 15.21: Visualizingand modeling departing
airplanes.
Example 15.6.2. Three airplanes depart SeaTac Airport.A NorthWest flight is heading in a direction
� � � counter-clockwise from East, an Alaska flight is heading
���coun-
terclockwise from East and a Delta flight is heading ��� �clockwise from East. Find the location of the Northwestflight when it is 20 miles North of SeaTac. Find the loca-tion of the Alaska flight when it is 50 miles West of SeaTac.Find the location of the Delta flight when it is 30 miles Eastof SeaTac.
Solution. We impose a coordinate system in Fig-ure 15.21(a), where “East” (resp. “North”) points along thepositive -axis (resp. positive � -axis). To solve the prob-lem, we will find the equation of the three lines represent-ing the flight paths, then determine where they intersectthe appropriate horizontal or vertical line. The Northwestand Alaska directions of flight are angles in standard cen-tral position; the Delta flight direction will be � ��� � . We canimagine right triangles with their hypotenuses along thedirections of flight, then using the tangent function, wehave these three immediate conclusions:
slope NW line � tan��� � � � � � � �
slope Alaska line � tan�
� � � � � � � �� and
slope Delta line � tan� � ��� � � � � � �� � � �

15.6. OTHER BASIC CIRCULAR FUNCTION 211
All three flight paths pass through the origin� � ��� � of our coordinate
system, so the equations of the lines through the flight paths will be:
NW flight � � � � � �Alaska flight � � � � � �
� �
Delta flight � � � � � �� � � �The Northwest flight is 20 miles North of SeaTac when ��� ��� ; plugginginto the equation of the line of flight gives ��� � � � , so � � � � andthe plane location will be � � �
� � � � ��� � . Similarly, the Alaska flight is50 miles West of SeaTac when � � � � ; plugging into the equation of theline of flight gives � � � � � �
�� � � � � � � � � and the plane location will be
� � � � � � � � � � . Finally, check that the Delta flight is at� � � �� � � � � � � �
when it is 30 miles East of SeaTac.

212 CHAPTER 15. THE CIRCULAR FUNCTIONS
15.7 ExercisesProblem 15.1. Answer the following ques-tions.
(a) Using the circular functions, computethe distance � (to four decimal places)in 13.5.4 on Page 179; compare this tothe arc length � .
(b) Go back to Chord Approximation in13.5.1 and give a formula for the EXACTlength of the chord in terms of the arclength � .
(c) Return to Exercise 13.5 on Page 183and compute the EXACT diameter of themoon, to the nearest mile.
Problem 15.2. John has been hired to de-sign an exciting carnival ride. Tiff, the car-nival owner, has decided to create the worldsgreatest ferris wheel. Tiff isn’t into math; shesimply has a vision and has told John theseconstraints on her dream: (i) the wheel shouldrotate counterclockwise with an angular speedof ��� RPM; (ii) the linear speed of a rider shouldbe 200 mph; (iii) the lowest point on the rideshould be 4 feet above the level ground. Recall,we worked on this in Exercise 14.7.
P
4 feet
12 RPM
θ
PSfrag replacements
-axis-axis
-axis
(a) Impose a coordinate system and find thecoordinates
� � ��� � � � � ��� � � � ��� � of Tiff attime � seconds after she starts the ride.
(b) Find Tiff’s coordinates the instant shebecomes a human missile.
(c) Find the equation of the tangential linealong which Tiff travels the instant shebecomes a human missile. Sketch a pic-ture indicating this line and her initialdirection of motion along it when theseat detaches.
Problem 15.3. (a) Find the equation of aline passing through the point (-1,2) andmaking an angle of ��� � with the � -axis.(Note: There are two answers; find themboth.)
(b) Find the equation of a line making anangle of
� � with the � -axis and passingthrough the point � ��� ��� . (Note: There aretwo answers; find them both.)
Problem 15.4. The crew of a helicopter needsto land temporarily in a forest and spot a flathorizontal piece of ground (a clearing in theforest) as a potential landing site, but are un-certain whether it is wide enough. They maketwo measurements from � (see picture) finding� � �� � and
� � �� � . They rise vertically 100feet to � and measure � � � � . Determine thewidth of the clearing to the nearest foot.
αβ
γ
B
A
C DE
100 feet
clearing
PSfrag replacements
-axis-axis
-axis
Problem 15.5. A merry-go-round is rotatingat the constant angular speed of 3 RPM coun-terclockwise. The platform of this ride is a cir-cular disc of radius 24 feet. You jump onto theride at the location pictured below.
θ
rotating 3 RPM
jump on here
PSfrag replacements
-axis-axis
-axis
(a) If � � �#� � , then what are your � � -coordinates after 4 minutes?

15.7. EXERCISES 213
(b) If � � ��� � , then what are your � � -coordinates after 45 minutes?
(c) If � � � � � � , then what are your � � -coordinates after 6 seconds? Draw anaccurate picture of the situation.
(d) If � � � � � rad, then what are your� � -coordinates after 2 hours and 7 sec-onds? Draw an accurate picture of thesituation.
(e) If � � � � rad, then what are your � � -coordinates after 5 seconds? Draw anaccurate picture of the situation.
Problem 15.6. In the picture, find a circle ofradius � so that the vertical coordinate of thepoint � is 13.
circle radius=1
P
O
circle radius=r
θ=0.813
W
PSfrag replacements
� -axis
� -axis
-axis
In the picture, find a circle of radius � so thatthe horizontal coordinate of � is -7.
circle radius=1
O
circle radius=s
α=0.2 Z
7
S
PSfrag replacements
� -axis
� -axis
-axis
Problem 15.7. The top of the Boulder Damhas an angle of elevation of 1.2 radians froma point on the Colorado River. Measuring theangle of elevation to the top of the dam froma point 155 feet farther down river is 0.9 radi-ans; assume the two angle measurements aretaken at the same elevation above sea level.How high is the dam?
dam
155 ft
0.9 1.2
a
downriver
PSfrag replacements
-axis-axis
-axis
Problem 15.8. A radio station obtains a per-mit to increase the height of their radio toweron Queen Anne Hill by no more than ����� feet.You are the head of the Queen Anne Commu-nity Group and one of your members asks youto make sure that the radio station does notexceed the limits of the permit. After finding arelatively flat area nearby the tower (not nec-essarily the same altitude as the bottom of thetower), and standing some unknown distanceaway from the tower, you make three mea-surements all at the same height above sealevel. You observe that the top of the old towermakes an angle of ��� � above level. You move����� feet away from the original measurementand observe that the old top of the tower nowmakes an angle of �#� � above level. Finally, af-ter the new construction is complete, you ob-serve that the new top of the tower, from thesame point as the second measurement wasmade, makes an angle of ��� � above the hori-zontal. All three measurements are made atthe same height above sea level and are in linewith the tower. Find the height of the additionto the tower, to the nearest foot.
Problem 15.9. Michael is running 8 mphclockwise around a circular track of radius200 feet. Michael begins at the Northernmostpoint on the track. Aaron is located 200 feetWest and 200 feet South of the center of thecircular track.
200 ft.
Aaron
N
S
EW
P
O
Michael starts here (8 mph)
Q
PSfrag replacements
-axis-axis
-axis

214 CHAPTER 15. THE CIRCULAR FUNCTIONS
(a) If � is Michael’s location after 45 sec-onds, what are the coordinates of � ?
(b) What is the distance from Aaron’s loca-tion to � ?
(c) Aaron starts running toward � (con-stant speed in a straight line) at the in-stant Michael starts running toward � .Aaron plans to tackle Michael the in-stant he arrives at � . How fast shouldAaron run?
(d) As in c., where is Michael located whenAaron first crosses the circular track?
Problem 15.10. George and Paula are run-ning around a circular track. George starts atthe westernmost point of the track, and Paulastarts at the easternmost point. The illustra-tion below shows their starting positions andrunning directions. They start running towardeach other at constant speeds. George runs at9 feet per second. Paula takes 50 seconds torun a lap of the track. George and Paula passeach other after 11 seconds.
N
George PaulaPSfrag replacements
-axis-axis
-axisAfter running for 3 minutes, how far east
of his starting point is George?
Problem 15.11. A kite is attached to 300 feetof string, which makes a 42 degree angle withthe level ground. The kite pilot is holding thestring 4 feet above the ground.
42o
4 feet
kite
ground level
PSfrag replacements
-axis-axis
-axis
(a) How high above the ground is the kite?
(b) Suppose that power lines are located250 feet in front of the kite flyer. Isany portion of the kite or string over thepower lines?
Problem 15.12. You are defending your titleas the US Billiard Champion. Your final shotrequires playing off the left and bottom cush-ions into the top right corner pocket, as indi-cated by the dotted path. For the big money,where should you aim to hit the left cushionand where will the ball strike the bottom cush-ion?
5 ft6 ft
12 ft
this pocket for the big money
find these locations
4 ft
PSfrag replacements
-axis-axis
-axis
Problem 15.13. A United flight departsSeaTac airport heading !�� � clockwise fromSouth. A crop duster leaves a rural airstriplocated 100 miles due North of SeaTac and isheading � � clockwise from South. Where willthe two lines of flight cross?
SeaTac
United
duster 100 miles
55 o
60 o
South
rural airstrip
PSfrag replacements
-axis-axis
-axis

15.7. EXERCISES 215
Problem 15.14. (a) If� � � � � � sin � � � � ��� ,
what is� � �� � �
� � ?(b) What is the maximum value of the func-
tion � � �� sin � � � ? Do not use a calculator
and explain your answer.
(c) What is the minimum value of the func-tion � sin � � ��� ? Do not use a calculatorand explain your answer.
(d) If� � ��� � � � and � � ��� � cos � ��� , what are� � � � ��� � and � � � � ��� � evaluated at � �
?
Problem 15.15. In the pictures below, a bughas landed on the rim of a jelly jar and is mov-ing around the rim. The location where thebug initially lands is described and its angu-lar speed is given. Impose a coordinate sys-tem with the origin at the center of the circleof motion. In each of the cases, answer thesequestions:
(a) Find an angle � � in standard central po-sition that gives the bugs initial location.(In some cases, this is the angle given inthe picture; in other cases, you will needto do something.)
(b) The location angle of the bug at time � isgiven by the formula � � ��� � � � � � � . Plugin the values for � � and � to explicitlyobtain a formula for � � ��� .
(c) Find the coordinates of the bug at time� .
(d) What are the coordinates of the bug af-ter 1 second? After 0 seconds? After 3seconds? After 22 seconds?
2 in
bug lands here
ω=4π/9 rad/sec
2 in
1.2 rad
bug lands here
ω=4π/9 rad/sec
1.2 rad
2 in
bug lands here
ω= − 4π/9 rad/sec
2 in
bug lands here
ω=4π/9 rad/sec
2 in
0.5 rad
ω=4π/9rad/sec
rad/secω= − 4π/9
bug lands here
bug lands here
2 in
40o
PSfrag replacements
-axis-axis
-axis

216 CHAPTER 15. THE CIRCULAR FUNCTIONS

Chapter 16
Trigonometric Functions
Our definitions of the circular functions are based upon the unit circle.This makes it easy to visualize many of their properties.
16.1 Easy Properties of Circular Functions
1
PSfrag replacements
� -axis
� -axis
-axis
ball movescounterclockwise
UNIT CIRCLE
� � � �
� � � ������ � � �
cos� � �
sin� � �
� � � � ���� ��� � � �
�
Figure 16.1: Visualizing therange of sin � � � and cos � � � .
How can we determine the range of function values forcos
� � � and sin� � � ? To begin with, recall the abstract
definition for the range of a function� � � � :
Range of� � � � � � � � � is in the domain � �
Using the unit circle constructions of the basic circularfunctions, it is easy to visualize the range of cos
� � � andsin
� � � . Beginning at the position� � � � , imagine a ball
moving counterclockwise around the unit circle. If we“freeze” the motion at any point in time, we will have swept out an angle�
and the corresponding position � � � � on the circle will have coordinates� � � � � �
cos� � � � sin
� � � � .PSfrag replacements
� -axis
� -axis
-axis
lightsource
ball moves from 0 to�
� radians around
unit
circle
(a) What do you see on the� -axis?
PSfrag replacements
� -axis
� -axis-axis
light source
ball moves from 0
to�
� radians
around unit circle
(b) What do you see on the� -axis?
Figure 16.2: Projecting the coordinates of points onto the � -axis and the � -axis.
By studying the coordinates of the ball as it moves in the first quad-rant, we will be studying cos
� � � and sin� � � , for � � � � � radians.
217

218 CHAPTER 16. TRIGONOMETRIC FUNCTIONS
We can visualize this very concretely. Imagine a light source as in Fig-ure 16.2(a); then a shadow projects onto the vertical � -axis. The shadowlocations you would see on the � -axis are precisely the values sin
� � � , for� � �� � � radians. Similarly, imagine a light source as in Figure 16.2(b);then a shadow projects onto the horizontal -axis. The shadow locationsyou would see on the -axis are precisely the values cos
� � � , for � � �� � �radians.
There are two visual conclusions: First, the function values of sin� � �
vary from 0 to 1 as�
varies from 0 to � � � . Secondly, the function valuesof cos
� � � vary from 1 to 0 as�
varies from 0 to � � � . Of course, we can goahead and continue analyzing the motion as the ball moves into the sec-ond, third and fourth quadrant, ending up back at the starting position� � � � . See Figure 16.3.
PSfrag replacements
� -axis
� -axis
-axis
lightsource
ball moves from0 to� �
radiansaround unitcircle
#1#2
#3#4
(a) What do you see on the� -axis?
PSfrag replacements
� -axis
-axis
-axis
light source
ball moves from 0
to� �
radians
around nit circle#1#2
#4#3
(b) What do you see on the� -axis?
Figure 16.3: Analyzing the values of the sine and cosine functions.
The conclusion is that after one complete counterclockwise rotation,the values of sin
� � � and cos� � � range over the interval
� � � �� . As theball moves through the four quadrants, we have indicated the “order” inwhich these function values are assumed by labeling arrows #1 — #4:For example, for the sine function, look at Figure 16.3(a). The values ofthe sine function vary from � up to while the ball moves through thefirst quadrant (arrow labeled #1), then from down to � (arrow labeled#2), then from � down to � (arrow labeled #3), then from � up to �(arrow labeled #4).
What about the tangent function? We have seen that the tangentfunction computes the slope of the hypotenuse of an inscribed triangle.This means we can determine the range of values of tan
� � � by investigat-ing the possible slopes for these inscribed triangles. We will maintain theabove model of a ball moving around the unit circle.
We look at two cases, each starting at� � � � . In the first quadrant, the
ball moves counterclockwise and in the fourth quadrant it moves clock-wise: In the first quadrant, we notice that these hypotenuse slopes arealways non-negative, beginning with slope � (the degenerate right triangle

16.1. EASY PROPERTIES OF CIRCULAR FUNCTIONS 219
1
2
3
4
5
678
PSfrag replacements
� -axis
� -axis
-axis
(a) What happens to theslopes of these triangles?
1
2
3
4
5
67
PSfrag replacements
� -axis
� -axis
-axis
(b) What happens to theslopes of these triangles?
Figure 16.4: Analyzing the values of the tangent function.
when� � � ) then increasing. In fact, as the angle
�approaches � � � ra-
dians, the ball is getting closer to the position� � � � and the hypotenuse
is approaching a vertical line. This tells us that as�
varies from 0 to� � � (but not equal to � � � ), these slopes attain all possible non-negativevalues. In other words, the range of values for tan
� � � on the domain� � � � � will be � �
� . Similar reasoning shows that as the ballmoves in the fourth quadrant, the slopes of the hypotenuses of the tri-angles are always non-positive, varying from 0 to ANY negative value. Inother words, the range of values for tan
� � � on the domain � � � �� � �will be � �
� �� .On your calculator, you can verify the visual conclusions we just es-
tablished by studying the values of tan� � � for
�close (but not equal) to
� �radians =
� � � :tan
� � � � � � � � � � � tan� � � � � � � � � � � � �
tan� � � � � � � � � � � � � � tan
� � � � � � � � � � � � � � � �tan
� � � � � � � � � � � � � � � � tan� � � � � � � � � � � � � � � � � �
......
The fact that the values of the tangent function become arbitrarily largeas we get close to � � � � radians means the function output values areunbounded.
Important Fact 16.1.1 (Circular function values). For any angle�, we
always have � ��� � � � and � sin� � � . On domain � � ��� ,
the range of both cos� � � and sin
� � � is � � . In contrast, on thedomain of all
�values for which tangent is defined, the range of tan
� � � isall real numbers.

220 CHAPTER 16. TRIGONOMETRIC FUNCTIONS
For the sine and cosine functions, if the domain is not � � ��� ,then we need to consider the “periodic qualities” of the circular functionsto determine the range. This is discussed below.
16.2 IdentitiesThere are dozens of formulas that relate the values of two or more cir-cular functions; these are usually lumped under the heading of Trigono-metric Identities. In this course, we only need a couple frequently usedidentities.
If we take the point � � �cos
� � � � sin� � � � on the unit circle, correspond-
ing to the standard central position angle�, then recall the equation of
the unit circle tells us � � � � � . But, since the coordinate is cos� � � and
the � coordinate is sin� � � , we have
�cos
� � � � � � �sin
� � � � � � � It is commonnotational practice to write
�cos
� � � � � � cos� � � � and
�sin
� � � � � � sin� � � � .
This leads to the most important of all trigonometric identities:
Important Fact 16.2.1 (Trigonometric identity). For any angle�, we
have the identity cos� � � � � sin
� � � � � .
Adding any multiple of ��� radians (or � � � ) to an angle will not changethe values of the circular functions. If we focus on radians for a moment,this says that knowing the values of cos
� � � and sin� � � on the domain
� � ��� determines the values for any other possible angle.There is something very general going on here, so let’s pause a mo-
ment to make a definition and then an observation.
Definition 16.2.2 (Periodic function). For � � � , a function� � � � is called
� -periodic if two things are true:
(i)� � � � � � � � � � � holds for all
�;
(ii) There is no smaller � , � � � , such that� � � � �� � � � � � holds for all
�.
We usually call � the period of the function.
Using this new terminology, we conclude that the sine and cosinecircular functions are ��� -periodic. In the case of the tangent circularfunction, it is also true that tan
� � � � tan� � ����� � � , for every integer
�
.However, referring back to the unit circle definitions of the circular func-tions, we have tan
� � � � tan� � � � � � , for all integers
�
. If you take� � ,
then this tells us that the tangent circular function is � -periodic. Wesummarize this information below.
Important Fact 16.2.3 (Periodicity identity). For any angle�
and anyinteger
� ��� � � � � � � � � � � � , we have cos� � � � cos
� � � ��� � � , sin� � � � sin
� � ���� � � , and tan
� � � � tan� � � � � � .

16.2. IDENTITIES 221
PSfrag replacements
-axis
-axis
-axis
unitcircle
�
� �
�cos
� � � �sin
� � ��� � ���
�cos
� � � � �sin
� � � ��� � ���
��
Figure 16.5: Visualizing atrigonometric identity.
Next, we draw an angle�
and its negative in the sameunit circle picture in standard central position. We haveindicated the points � � and � �
� used to define the circu-lar functions. It is clear from the picture in Figure 16.5that � � and � �
� have the same -coordinate, but the � -coordinates are negatives of one another. This gives thenext identity:
Important Fact 16.2.4 (Even/Odd identity). For any angle�, sin
� � � � �� sin
� � � , and cos� � � � � cos
� � � .
We can use the terminology of even and odd functions here. In thislanguage, this result says that the cosine function is an even functionand the sine function is an odd function.
PSfrag replacements
-axis
-axis
-axis
unitcircle
��� � �cos
� � � �sin
� � ����
� � �� � � �
��cos
� � � � � � � sin� � � � ���
�
Figure 16.6: VisualizingFact 16.2.5.
Next, draw the angles�
and� � � in the same unit
circle picture in standard central position. We have in-dicated the corresponding points � � and � � � � on the unitcircle and their coordinates in terms of the circular func-tions: From the picture in Figure 16.6, the -coordinate of
� � must be the “negative” of the -coordinate of � � � � andsimilarly, the � -coordinate of � � must be the “negative” ofthe � -coordinate of � � � � . This gives us the next identity:
Important Fact 16.2.5 (Plus � identity). For any angle�, we have
sin� � � � � � � sin
� � � , and cos� � � � � � � cos
� � � .
Important Fact 16.2.6. For any angle�, we have sin
� � � � � � sin� � � and
cos� � � � � � � cos
� � � .
For example, we have sin � �� � � sin � � � � � �� . This calculation leads to acomputational observation: Combining Table 15.1 with the previous twoidentities we can compute the EXACT value of cos
� � � , sin� � � , and tan
� � �at an angle
�which is a multiple of �� � � �
� radians or� � � � � � radians.
Here are some sample calculations together with a reference as to “why”each equality is valid:

222 CHAPTER 16. TRIGONOMETRIC FUNCTIONS
Example 16.2.7.
(i) cos� �� � � � � cos
� � � � � Fact � � � � � on page � � �
� �� Table
�� on page ���
(ii) sin� � � � � � � sin
� � � �� � � � � Fact � � � �� on page � ���
� � sin� � � � � Fact � � � � � on page � �
� �� �� Table
�� on page ���
(iii) cos� ��� � � cos
�� � � � � Fact � � � �� on page � ���
� � cos�� � � Fact � � � � � on page � �
� � cos� � � Fact � � � � � on page � �
� � � Table
�� on page ���
16.3 Graphs of Circular Functions
We have introduced three new functions of the variable�
and it is impor-tant to understand and interpret the pictures of their graphs. To do this,we need to settle on a coordinate system in which to work. The horizontalaxis will correspond to the independent variable, so this should be the
�-
axis. We will label the vertical axis, which corresponds to the dependentvariable, the
�-axis. With these conventions, beginning with any of the
circular functions� � sin
� � � , � � cos� � � , or
� � tan� � � , the graph will be
a subset of the� �
-coordinate system. Precisely, given a circular function� � � � � � , the graph consists of all pairs� � � � � � � � , where
�varies over a do-
main of allowed values. We will record and discuss these graphs below;a graphing device will painlessly produce these for us!
There is a point of possible confusion that needs attention. We pur-posely did not use the letter “� ” for the dependent variable of the circularfunctions. This is to avoid possible confusion with our construction ofthe sine and cosine functions using the unit circle. Since we viewed theunit circle inside the � -coordinate system, the -coordinates (resp. � -coordinates) of points on the unit circle are computed by cos
� � � (resp.sin
� � � ).

16.3. GRAPHS OF CIRCULAR FUNCTIONS 223
PSfrag replacements
-axis
-axis
-axis
Coordinate system used toGRAPH the circular functions.
� ��cos� � � � sin
� � � �
Coordinate system used to DE-FINE the circular functions.
� �
��
�
Figure 16.7: The�
� versus � � coordinate systems.
16.3.1 A matter of scaling
The first issue concerns scaling of the axes used in graphing the circularfunctions. As we know, the definition of radian measure is directly tiedto the lengths of arcs subtended by angles in the unit circle:
Important Fact 16.3.1. An angle of measure 1 radian inside the unitcircle will subtend an arc of length 1.
Since length is a good intuitive scaling quantity, it is natural to scalethe
�-axis so that the length of 1 radian on the
�-axis (horizontal axis)
is the same length as 1 unit on the vertical axis. For this reason, wewill work primarily with radian measure when sketching the graphs ofcircular functions. If we need to work explicitly with degree measure forangles, then we can always convert radians to degrees using the fact: � � � = ��� radians.
16.3.2 The sine and cosine graphs
Using Fact 16.1.1, we know that � sin� � � and � cos
� � � .Pictorially, this tells us that the graphs of
� � sin� � � and
� � cos� � � lie
between the horizontal lines� � and
� � � ; i.e. the graphs lie insidethe darkened band pictured in Figure 16.8.
By Fact 16.2.3, we know that the values of the sine and cosine repeatthemselves every ��� radians. Consequently, if we know the graphs of thesine and cosine on the domain � � ��� , then the picture will repeat forthe interval ��� �
�� , � ��� � �� , etc.

224 CHAPTER 16. TRIGONOMETRIC FUNCTIONSPSfrag replacements
-axis
-axis
-axis� -axis
�-axis
� � �
� � � �
Figure 16.8: Visualizing the range of sin � � � and cos � � � .
PSfrag replacements
-axis
-axis
-axis
� -axis
�-axis
RepeatRepeat RepeatRepeat
� � � �� � � � � � � � �
picture in here repeats each� � units
� � �
� � � �
Figure 16.9: On what intervals will the graph repeat?
Sketching the graph of� � sin
� � � for � � ��� can be roughlyachieved by plotting points. For example, � � � � �� � , � � � � � �� � ,
� � � � � �� � , and� � � � � lie on the graph, as do � � �� � � � , � �� � � � �� � ,���� � � � �
� � , � � � �� � � �� � , and� ��� � � � , etc. If we return to our analysis of the range of values for thesine function in Figure 16.2, it is easy to see where sin
� � � is positive ornegative; combined with Chapter 4, this tells us where the graph is aboveand below the horizontal axis (see Figure 16.10).
PSfrag replacements
-axis
-axis
-axis
�-axis
� -axis
�� � � � � � � � �
Figure 16.10: Where the graph positive or negative?
We now include a software plot of the graph of sine function, observingthe three qualitative features just isolated: bounding, periodicity andsign properties (see Figure 16.11).

16.3. GRAPHS OF CIRCULAR FUNCTIONS 225
−1
1
PSfrag replacements
-axis
-axis
-axis
�-axis
� -axis
�� � � � � � � � �
one period
Figure 16.11: The graph of�
� sin � � � .PSfrag replacements
-axis
-axis
-axis� � ��
� ��
unitcircle
Figure 16.12: Visualizingthe conversion identity.
We could repeat this analysis to arrive at the graphof the cosine. Instead, we will utilize an identity. Givenan angle
�, place it in central standard position in the
unit circle, as one of the four cases of Figure 15.16. Forexample, we have pictured Case I in this figure. Sincethe sum of the angles in a triangle is � � � � � radians,we know that
�, � � � , and
� � � �are the three angles of the
inscribed right triangle. From the picture in Figure 16.12,it then follows that
cos� � � � side adjacent to
�
hypotenuse
� side opposite to � � � � � �hypotenuse
� sin� �� �
� � �
Using the same reasoning this identity is valid for all�. This gives us
another useful identity:
Important Fact 16.3.2 (Conversion identity). For any angle�, cos
� � � �sin � � � � � � , and sin
� � � � cos � � � � � � .This identity can be used to sketch the graph of the cosine function.
First, we do a calculation using our new identity:
cos� � � � cos
� � � � Fact � � � � � on page � � � sin
� �� � � � � � � Fact � �� � � (above)
� sin�� �
�� � � � � Since:
���� � � � ��� � � � � � � � �
� � � � � � �By the horizontal shifting principle in Fact 9.3.1 on page 127, the graphof
� � cos� � � is obtained by horizontally shifting the graph of
� � sin� � �
by� � units to the left. Here is a plot of the graph of the cosine function:
See Figure 16.13.

226 CHAPTER 16. TRIGONOMETRIC FUNCTIONS
−1
1
PSfrag replacements
-axis
-axis
-axis
�-axis
� -axis
�� � � � � � � � �
one period
Figure 16.13: The graph of�
� cos � � � .
16.3.3 The tangent graph
PSfrag replacements
-axis
-axis
-axis
�-axis
� -axis
� � � �
�
� � �
�
graph heads thisway, getting closeto vertical line as
�
gets close to�
�graph heads thisway, getting closeto vertical line as
�
gets close to� �
�
�
�� �
�
Figure 16.14: The behaviorof tan � � � as � approaches
asymptotes.
As we have already seen, unlike the sine and cosine circu-lar functions, the tangent function is NOT defined for allvalues of
�. Since tan
� � � � sin� � �
cos� � � , here are some properties
we can immediately deduce:
� The function� � tan
� � � is undefined if and only if� � � � � � � , where
� ��� � � � � � � � � �� The function
� � tan� � � � � if and only if
� � � � ,where
� ��� � � � � � � � � �� By Fact 16.2.3, the tangent function is � -periodic, so the picture of
the graph will repeat itself every � -units and it is enough to under-stand the graph when � � � �
� � .� On the domain � �
� � , tan� � � � � ; on the domain � � � � � ,
tan� � � �� .
In the� �
-coordinate system, the vertical lines� � � � � � � , where
� � � � � � � � � will be vertical asymptotes for the graph of the tangentfunction. Using our slope interpretation in Figure 16.4, what becomesclear is this: As the values of
�get close to
� � , the graph is getting closeto the vertical line
� � � � AND becoming farther and farther away fromthe horizontal axis: To understand this numerically, first suppose
�is
slightly smaller than� � , say
� � � � � � � � � , � � � � � � � � , and � � � � � � � � � . Thenthe calculation of tan
� � � involves dividing a number very close to 1 by avery small positive number:
tan� �� � � � � � � � � ����� �
tan� �� � � � � � � � � � � � � � � and
tan� �� � � � � � � � � � � �

16.4. TRIGONOMETRIC FUNCTIONS 227
PSfrag replacements
-axis
-axis
-axis
� -axis
�-axis
� � � � � � � � � �
� � ��
�
�
� � � �
�
� � �
�� �
��
�
� � � �
�etc. etc.
one period
Figure 16.15: The graph of�
� �� � � � .
Conclude that as�
“approaches� � from below”, the val-
ues of tan� � � are becoming larger and larger. This says
that the function values become “unbounded”. Likewise,imagine the case when
�is slightly bigger than � � � , say
� � � � � � � � � � , � � � � � � � � � , and � � � � � � � � � � . Then thecalculation of tan
� � � involves dividing a number very closeto � by a very small positive number:
tan�� � � � � � � � � � � � ����� �
tan�� � � � � ��� � � � � � � � � � � � and
tan�� � � � � ��� � � � � � � � �
Conclude that as�
“approaches � � � from above”, the values of tan� � � are
becoming negative numbers of increasingly larger magnitude:Again, this tells us the function values are becoming “unbounded”.
The graph of� � tan
� � � for � � � � � � can be roughly achieved by com-
bining the calculations as in Example 16.2.7 and the qualitative featureshighlighted. Figure 16.15 shows a software plot.
16.4 Trigonometric FunctionsTo become successful mathematical modelers, we must have wide varietyof functions in our toolkit. As an illustration, the graph below mightrepresent the height of the tide above some reference level over the courseof several days. The curve drawn is clearly illustrating that the height ofthe tide is “periodic” as a function of time � ; in other words, the behaviorof the tide repeats itself as time goes by. However, if we try to model thisperiodic behavior, the only weapon at our disposal would be the circularfunctions and these require an angle variable, not a time variable suchas � ; we are stuck!
Modeling the tide graph requires the trigonometric functions, which lieat the heart of studying all kinds of periodic behavior. We have no desireto “reinvent the wheel”, so let’s use our previous work on the circularfunctions to define the trigonometric functions.
16.4.1 A TransitionGiven a real number � , is there a sensible way to define cos
� ��� and sin� ��� ?
The answer is yes and depends on the ideas surrounding radian measureof angles. Given the positive real number � , we can certainly imagine anangle of measure � radians inside the unit circle (in standard position)and we know the arc subtended by this angle has length � (this is whywe use the unit circle).

228 CHAPTER 16. TRIGONOMETRIC FUNCTIONS
PSfrag replacements
-axis
-axis
-axis
�� �� � � � �� �
� � � �
� � �� �
feet
(time)
Figure 16.16: A periodic function with input variable � .
PSfrag replacements
-axis
-axis
-axis
� ��� � � � � �
arclength � �
� � � � �
rads
unit circle
Figure 16.17: The circularfunctions with input variable
� .
We already know that cos� � radians � and sin
� � radians �compute the and � coordinates of the point � � ��� . Ineffect, we are just using the measure of the angle � tohelp us locate the point � � ��� . An alternate way to locate
� � ��� is to move along the circumference counterclockwise,beginning at
� � � � , until we have an arc of length � ; that
again puts us at the point � � ��� . In the case of an angleof measure � � radians, the point � � � ��� can be located bymoving along the circumference clockwise, beginning at� � � � , until we have an arc of length � .
Definition 16.4.1 (Trigonometric functions). Let � be a real number.We DEFINE the sine function � � sin
� ��� , the cosine function � � cos� ��� and
the tangent function � � tan� ��� by the rules
sin� ��� def� � -coordinate of � � ��� � sin
� � radians �cos
� ��� def�� -coordinate of � � ��� � cos� � radians �
tan� ��� def� sin
� ���cos
� ��� � tan� � radians �
We refer to these as the basic trigonometric functions. If we are work-ing with radian measure and � is a real number, then there is no differ-ence between evaluating a trigonometric function at the real number �and evaluating the corresponding circular function at the angle of mea-sure � radians.
Example 16.4.2. Assume that the number of hours of daylight in Seattleduring 1994 is given by the function �
� ��� � � � � � � � �� � � � � � � � � � � � � � � where

16.4. TRIGONOMETRIC FUNCTIONS 229
� represents the day of the year and � � � corresponds to January 1. Howmany hours of daylight will there be on May 11?
Solution. To solve the problem, you need to consult a calendar, findingevery month has 31 days, except: February has 28 days and April, June,September and November have 30 days. May 11 is the � � � � � �� � �� st day of the year. So, there will be �
�� � � � � sin
� � ��� � � � � � � ��� � � � ��� � � hours of daylight on May 11.
16.4.2 Graphs of trigonometric functionsThe graphs of the trigonometric functions � � sin
� ��� , � � cos� ��� , and
� � tan� ��� will look just like Figures 16.11, 16.13, and 16.15, except that
the horizontal axis becomes the � -axis and the vertical axis becomes the� -axis.
16.4.3 Notation for trigonometric functionsIn many texts, you will find the sine function written as � � sin � ; i.e. theparenthesis around the “ � ” are omitted. A similar comment applies to allof the trigonometric functions. We will never do this and the reasoningis simply this: Maintaining the parenthesis, as in � � sin
� ��� , emphasizesthe fact that we are dealing with a function and the “input values” arelocated between the parenthesis. For example, if we write the function� � sin
� � � � � � � � , it is crystal clear that the sine function is applied to theexpression “ � � � � � � ”; using the alternate notation yields the expression� � sin � � � � � � , which is interpreted to mean � � �
sin � � � � � � � � � .As a rule, whenever you see an expression involving sin
������� � , cos������� � ,
or tan������� � , we assume “
�����
” is in units of RADIANS, unless otherwisenoted. When computing values on your calculator, MAKE SURE YOUARE USING RADIAN MODE!
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis

230 CHAPTER 16. TRIGONOMETRIC FUNCTIONS
16.5 ExercisesProblem 16.1. On your calculator you cancheck that cos � !�� � ��� �� �"� � � and sin � !�� � ����� � � ��� .
(a) Find four other angles�
so that cos � � � �� �"� � � and sin � � � � � � � ��� .
(b) Find an angle�
, "��� � � � � ������� � , sothat cos � � � � �� �"� � � and sin � � � � � � � ��� .
(c) How many angles�
of measure between� � � and ��!�� � will have cos � � � � � �"� � � ?
(d) How many angles�
of measure between� ��� � and ������� � will have cos � � � � �� �"� � � ?
Problem 16.2. Work the following problemswithout using ANY calculators.
(a) Sketch ��� sin � ��� .(b) Sketch ��� sin � � ��� .(c) Sketch ��� �
��� sin � � ��� .
Problem 16.3. Sketch the graphs of thesefunctions:
(a)� � ��� � �
sin � ��� �.
(b)� � ��� � �
cos � ��� �.
(c)� � ��� � �
tan � ��� �.
(d)
� � ��� � ��
�sin � ��� �
if � � ��
�sin � �� � ��� �
� � if � ���
(e) Solve the equation � � ��� � � , where � � ��� isas in (d).
Problem 16.4. Solve the following:
(a) If cos � � � � � ��
� , what are the two possiblevalues of sin � � � ?
(b) If sin � � ��� � � � and � is in the thirdquadrant of the � � plane, what is cos � � � ?
(c) If sin � � � � $� , what is sin � � � � � � ?
Problem 16.5. These graphs represent peri-odic functions. Describe the period in eachcase.
PSfrag replacements
-axis-axis
-axis
Problem 16.6. Start with the equationsin � � � � cos � � � . Use the unit circle interpre-tation of the circular functions to find the so-lutions of this equation; make sure to describeyour reasoning.
Problem 16.7. Answer the following ques-tions:
(a) If� � ��� � sin � ��� and � � ��� � � � , what is� � � � � � � ? What is
� � � � �� � ? What is � � � � � � � ?What is � � � � �� � ?
(b) If� � ��� � sin � ��� and � � ��� � � � � � � � ,
what is� � � � � � � ? What is
� � � � ��� � ? What is� � � � � � � ? What is � � � � ��� � ?(c) If
� � � � � � � ��� � sin � ��� , what is� � � � � � � ?
What is� � � � ��� � ? Is
� � � � ��� � � � sin � ��� � � ?
Problem 16.8. Dave is replumbing his houseand needs to carry a copper pipe around thecorner of a hallway. As he cheerfully walksdown the hall and rounds the corner, the pipebecomes stuck, as pictured. Assume Davemust always hold the pipe level; i.e. he can’ttilt it up or down.
4 ft
3 ft
pipe
−TOP VIEW−
θ
θ
PSfrag replacements
-axis-axis
-axis
(a) Find a formula for the function � � � �which computes the length of thelongest pipe that will fit with the pic-tured angle � .
(b) Describe how you could use the functionin a. to find the LONGEST pipe Dave cancarry around the corner.

16.5. EXERCISES 231
(c) Assume the length of the pipe is mini-mized when � � �"� �� � ; how long is thepipe?
Problem 16.9. For each situation described,which could possibly be described using a pe-riodic function?
(a) The population of rabbits in a largewooded area as a function of time.
(b) As you pedal a bike, the height of yourbig toe above the ground as a functionof time.
(c) As you pedal a bike, the distance youhave traveled as a function of time.
(d) The score for the UW womens Bball teamas a function of time elapsed during agame.
(e) Tuition at the UW as a function of time.

232 CHAPTER 16. TRIGONOMETRIC FUNCTIONS

Chapter 17
Sinusoidal Functions
PSfrag replacements
-axis
-axis
-axis
�
�
����
� � � � � � � � � �time
dep
th
Figure 17.1: The depth of asalmon as a function of time.
A migrating salmon is heading up a portion of theColumbia River. It’s depth �
� ��� (in feet) below the watersurface is measured and plotted over a 30 minute period,as a function of time � (minutes). What is the formula for�� ��� ?
In order to answer the question, we need to introducean important new family of functions called the sinusoidalfunctions. These functions will play a central role in mod-eling any kind of periodic phenomena. The amazing factis that almost any function you will encounter can be approximated by asum of sinusoidal functions; a result that has far-reaching implicationsin all of our lives.
17.1 A special class of functionsBeginning with the trigonometric function � � sin
� � , what is the mostgeneral function we can build using the graphical techniques of shiftingand stretching?
PSfrag replacements
-axis
-axis
-axis
horizontally shift
horizontally dilate
vertically vertically
shiftdilate
�-axis
� -axis
� �sin
� � �
�� � �
�� �
�
�� �
Figure 17.2: Visualizing the geometric operations available for curve sketching.
The graph of � � sin� � can be manipulated in four basic ways: hori-
zontally shift, vertically shift, horizontally dilate or vertically dilate. Eachof these “geometric operations” corresponds to a simple change in the“symbolic formula” for the function, as discussed in Chapter 9.
233

234 CHAPTER 17. SINUSOIDAL FUNCTIONS
If we vertically shift the graph by � units upward, the resulting curvewould be the graph of the function � � sin
� � � � ; see Facts 9.3.1. Recall,the effect of the sign of � : If � is negative, the effect of shifting � unitsupward is the same as shifting
� � � units downward. Notice, the function� � sin
� � � � is still a periodic function, having the same period ��� as� � sin
� � . Notice, whereas the graph of the function � � sin� � oscillates
between the horizontal lines � � � , the graph of � � sin� � � � oscillates
between ��� � � . For this reason, we sometimes refer to the constant� as the mean of the function � � sin� � � � . In Figure 17.3, notice that
the graph of � � sin� � � � is symmetrically split by the horizontal “mean”
line � � � .
PSfrag replacements
-axis
-axis
-axis
-axis
-axis
� �sin
� � �
� -axis � -axis
� � � �
sin� � � �
shift
units
Figure 17.3: Interpreting the mean.
Next, consider the effect of horizontally shifting the graph of � � sin� �
by�
units to the right. By Facts 9.3.1, the new curve is the graph ofthe function � � sin
� � � � . Also, recall the effect of the sign of�: If�
is negative, the effect of shifting�
units right is the same as shifting� � �units left. If the domain of sin
� � is � ��� , then the domain ofsin
� � � � is � � � ��� , again by Facts 9.3.1. Rewriting this, thedomain of sin
� � � � is� ��� � �
and the graph will go throughprecisely one period on this domain. In other words, the new functionsin
� � � � is still ��� -periodic. The constant�
is usually called the phaseshift of � � sin
� � � � . Looking at Figure 17.4, it is possible to interpret�
graphically:�
will be a point where the graph crosses the horizontal axison its way up from a minimum to a maximum.
PSfrag replacements
-axis
-axis
-axis
-axis
-axis
� -axis� -axis
� � ����� � � �
shift�
units
�� �
sin� � � � �
Figure 17.4: Interpreting the phase shift.
Vertically dilating the graph, either by vertical expansion or compres-sion, leads to a new curve. The graph of this vertically dilated curveis � � � sin
� � , for some positive constant � . Furthermore, if � � ,

17.1. A SPECIAL CLASS OF FUNCTIONS 235
the graph of � � � sin� � is a vertically expanded version of � � sin
� � ,whereas, if � � , then the graph of � � � sin
� � is a vertically com-pressed version of � � sin
� � . Notice, the function � � � sin� � is still ��� -
periodic. What has changed is the band of oscillation: whereas the graphof the function � � sin
� � stays between the horizontal lines � � � , thegraph of � � � sin
� � oscillates between the horizontal lines � � � � . Weusually refer to � as the amplitude of the function � � � sin
� � .
PSfrag replacements
-axis
-axis
-axis
-axis
-axis � �sin
� � �
� -axis
� -axis
stretch�
units
�� � �
sin� � �
Figure 17.5: Interpreting the amplitude.
Finally, horizontally dilating the graph, either by horizontal expansionor compression, leads to a new curve. The equation of this horizontallydilated curve is ��� sin
�� � , for some constant � � � . We know that ���
sin� � is a ��� -periodic function and observe that horizontally dilation still
results in a periodic function, but the period will typically NOT be ��� . Forfuture purposes, it is useful to rewrite the equation for the horizontallystretched curve in a way more directly highlighting the period. To beginwith, once the horizontal stretching factor � is known, we could rewrite
� � ���� � for some � ���� �
stretch
PSfrag replacements
-axis
-axis
-axis
�-axis
�-axis
� -axis
� -axis
� �sin
� � �
stretch
� �sin
��� � �
�� � �
Figure 17.6: Interpreting the period.
Here is the point of this yoga with the horizontal dilating constant: Ifwe let the values of range over the interval
� � � � � , then� �� will range over
the interval� � � ��� � . In other words, the function � � sin � � �� � is � -periodic
and we can read off the period of � � sin � � �� � by viewing the constantin this mysterious way. The four constructions outlined lead to a newfamily of functions.

236 CHAPTER 17. SINUSOIDAL FUNCTIONS
Definition 17.1.1 (The Sinusoidal Function). Let � , � ,�
and � be fixedconstants, where � and � are both positive. Then we can form the newfunction
� � � sin� ����� � � � � � � �
which is called a sinusoidal function. The four constants can be interpretedgraphically as indicated:
PSfrag replacements
-axis
-axis
-axis
all four
operations
-axis
-axis
� -axis� -axis
� �sin
� � �
��
�
� � �sin
� � � �
�� � � � � ��� �
Figure 17.7: Putting it all together for the sinusoidal function.
17.1.1 How to roughly sketch a sinusoidal graph
Important Procedure 17.1.2. Given a sinusoidal function in the standardform
� � � sin� ����� � � � � � � �
once the constants � , � ,�
, and � are specified, any graphing device canproduce an accurate graph. However, it is pretty straightforward to sketcha rough graph by hand and the process will help reinforce the graphicalmeaning of the constants � , � ,
�, and � . Here is a “five step procedure”
one can follow, assuming we are given � , � ,�
, and � . It is a good idea tofollow Example 17.1.3 as you read this procedure; that way it will seem alot less abstract.
1. Draw the horizontal line given by the equation � � � ; this line will“split” the graph of ��� � sin � � �� � � � � � � � into symmetrical upperand lower halves.
2. Draw the two horizontal lines given by the equations � � � � � . Thesetwo lines determine a horizontal strip inside which the graph of the

17.1. A SPECIAL CLASS OF FUNCTIONS 237
sinusoidal function will oscillate. Notice, the points where the sinu-soidal function has a maximum value lie on the line � � � � � . Like-wise, the points where the sinusoidal function has a minimum valuelie on the line � � � � � . Of course, we do not yet have a prescriptionthat tells us where these maxima (peaks) and minima (valleys) arelocated; that will come out of the next steps.
3. Since we are given the period � , we know these important facts: (1)The period � is the horizontal distance between two successive max-ima (peaks) in the graph. Likewise, the period � is the horizontaldistance between two successive minima (valleys) in the graph. (2)The horizontal distance between a maxima (peak) and the successiveminima (valley) is �� � .
4. Plot the point� � � � � . This will be a place where the graph of the
sinusoidal function will cross the mean line � � � on its way upfrom a minima to a maxima. This is not the only place where thegraph crosses the mean line; it will also cross at the points obtainedfrom
� � � � � by horizontally shifting by any integer multiple of �� � .For example, here are three places the graph crosses the mean line:� � � � � � � � � �� � � � � � � � � � � � �
5. Finally, midway between� � � � � and
� � � �� � � � � there will be a maxima(peak); i.e. at the point
� � � �� � � � � � � . Likewise, midway between� � � �� � � � � and� � � � � � � there will be a minima (valley); i.e. at the
point� � � �� � � � � � � . It is now possible to roughly sketch the graph on
the domain� � � � by connecting the points described. Once
this portion of the graph is known, the fact that the function is periodictells us to simply repeat the picture in the intervals
� � � � � � � ,� � � �, etc.
To make sense of this procedure, let’s do an explicit example to seehow these five steps produce a rough sketch.

238 CHAPTER 17. SINUSOIDAL FUNCTIONS
Example 17.1.3. The temperature (in� �
) of Adri-N’s dorm room variesduring the day according to the sinusoidal function �
� ��� � � sin � ��� � � � � � �
� � where � represents hours after midnight. Roughly sketch the graph of�� ��� over a 24 hour period.. What is the temperature of the room at 2:00
pm? What is the maximum and minimum temperature of the room?
Solution. We begin with the rough sketch. Start by taking an inventoryof the constants in this sinusoidal function:
�� ��� � � sin
� � �� � � � � � � � � sin
� ����� � � � � � � � �
Conclude that � � � , � � ��,
� � , � � � . Following the first foursteps of the procedure outlined, we can sketch the lines � � � � � ,� � � � � � � � � and three points where the graph crosses the meanline (see Figure17.8).
PSfrag replacements
-axis
-axis
-axis
� � � � graphwill oscillateinside thisstrip
� � � �� � � �� � � �
� � � � � � � � � ��� � � � ����� � � � �
� �
� �
� �� �
� �� �� �
� �� � � � � � � � � � � � � � � � �� � � � � ��� �
Figure 17.8: Sketching the mean�
and amplitude � .
According to the fifth step in the sketching procedure, we can plot themaxima
� � � �� � � � � � � � � � � � � � and the minima
� � � �� � � � � � � � � � � � � � .We then “connect the dots” to get a rough sketch on the domain � � .
PSfrag replacements
-axis
-axis
-axis
� � � � graph
will oscillate
inside this
strip
maxima
minima
� � � �� � � �� � � �
� � � � � � �� � � � � � �
� ����� � � �
� � � � � � �
� ��� � � � �� �
� �
� �
� �
� �� �
� �� �
� � � � � � � � � � � � � � � � �� � � � � ��� �
Figure 17.9: Visualizing the maximum and minimum over one period.

17.1. A SPECIAL CLASS OF FUNCTIONS 239
Finally, we can use the fact the function has period 24 to sketch thegraph to the right and left by simply repeating the picture every 24 hori-zontal units.
PSfrag replacements
-axis
-axis
-axis
�-axis
� -axis
graph
will oscillate
inside this
strip
maximamaxima maxima
minima minimaminima
� � � �� � � �� � � �
� � � ��� � � �� � � � � � �
� � � � � � �� ��� � � �
� � � � � � �� � � � � � �
� � � � � � �� ��� � � � �
��� ��� � � ���� � � � � �
� � � � � � �� � � � � � �
� � � � � � �
� �
� �
� �� �
� �� �� �
� �� � � � � � � � � � � � � � � � �� � � � � ��� � � �� �� �� � � �� � �� � �
Figure 17.10: Repeat sketch for every full period.
We restrict the picture to the domain � � ��
and obtain the com-puter generated graph pictured in Figure 17.11; as you can see, ourrough graph is very accurate. The temperature at 2:00 p.m. is just���� ��� � � � � C. From the graph, the maximum value of the function will
be � � � � � � � C and the minimum value will be � � � � � � C.
PSfrag replacements
-axis
-axis
-axis
tem
p
�
��
� � �
� �
� � � �
� � (hours)
Figure 17.11: The computer generated solution.
17.1.2 Functions not in standard sinusoidal formAny time we are given a trigonometric function written in the standardform
� � � sin� ����� � � � � � ���
for constants � , � ,�, and � (with � and � positive), the summary in
Definition 17.1.1 tells us everything we could possibly want to know

240 CHAPTER 17. SINUSOIDAL FUNCTIONS
about the graph. But, there are two ways in which we might encounter atrigonometric type function that is not in this standard form:
� The constants � or � might be negative. For example, � � � � sin� � ��� � � and � � sin � � �� � � � �
are examples that fail to be instandard form.
� We might use the cosine function in place of the sine function. Forexample, something like � � � cos
� � ��� � fails to be in standardsinusoidal form.
Now what do we do? Does this mean we need to repeat the analysis thatled to Definition 17.1.1? It turns out that if we use our trig identitiesjust right, then we can move any such equation into standard form andread off the amplitude, period, phase shift and mean. In other words,equations that fail to be in standard sinusoidal form for either of thesetwo reasons will still define sinusoidal functions. We illustrate how thisis done by way of some examples:
Examples 17.1.4.
(i) Start with � � � � sin� � � � � � , then here are the steps with reference
to the required identities to put the equation in standard form:
� � � � sin� � � � � �
��� � � sin� � � � � � �
��� sin� � � � � � � � � � � Fact 16.2.5 on page 221
��� sin� ����
� � � � � �
� � � � �� � � �
This function is now in the standard form of Definition 17.1.1, so it isa sinusoidal function with phase shift
� � � � �� � � � , mean � � � ,amplitude � ��� and period � ��� .
(ii) Start with � � sin� � �� � � �
�, then here are the steps with reference
to the required identities to put the equation in standard form:
� � sin�� � � � �
�
� sin��
�� � � � �
�
� �� sin
�� � � � �
�Fact 16.2.4 on page 221
� sin�� � � � � �
�Fact 16.2.5 on page 221
� sin� ������ � � � � ��� � � � �
�

17.2. EXAMPLES OF SINUSOIDAL BEHAVIOR 241
This function is now in the standard form of Definition 17.1.1, so itis a sinusoidal function with phase shift
� � � ����� , mean � ��,
amplitude � � and period ����� .
(iii) Start with � ��� cos� � � � � , then here are the steps to put the equa-
tion in standard form. A key simplifying step is to use the identity:cos
� ��� � sin� � � � ��� .
� ��� cos� � � � �
��� sin� �� � � � � �
��� sin� � � � �� �
� � � � � � � ���� sin
����� � �� �
� � � � �� �
� � � � �� � � �
This function is now in the standard form of Definition 17.1.1, so it isa sinusoidal function with phase shift
� � �� � � � � � � , mean � � � � ,amplitude � ��� and period ��� � �� .
17.2 Examples of sinusoidal behavior
Problems involving sinusoidal behavior come in two basic flavors. On theone hand, we could be handed an explicit sinusoidal function
� � � sin� ����� � � � � � �
and asked various questions. The answers typically require either directcalculation or interpretation of the constants. Example 17.1.3 is typicalof this kind of problem. On the other hand, we might be told a particularsituation is described by a sinusoidal function and provided some dataor a graph. In order to further analyze the problem, we need a “formula”,which means finding the constants � , � ,
�, and � . This is a typical
scenario in a “mathematical modeling problem”: the process of observingdata, THEN obtaining a mathematical formula. To find � , take half thedifference between the largest and smallest values of
� � � . The period �is most easily found by measuring the distance between two successivemaxima (peaks) or minima (valleys) in the graph. The mean � is theaverage of the largest and smallest values of
� � � . The phase shift�
(which is usually the most tricky quantity to get your hands on) is foundby locating a “reference point”. This “reference point” is a location wherethe graph crosses the mean line � � � on its way up from a minimumto a maximum. The funny thing is that the phase shift
�is NOT unique;
there are an infinite number of correct choices. One choice that will work

242 CHAPTER 17. SINUSOIDAL FUNCTIONS
is� � � -coordinate of a maximum ��� � � . Any other choice of
�will differ
from this one by a multiple of the period � .
� � max value � min value�
� � distance between two successive peaks (or valleys)� � -coordinate of a maximum � � �
� � max value � min value� �
Example 17.2.1. Assume that the number of hours of daylight in Seattleis given by a sinusoidal function �
� ��� of time. During 1994, assume thelongest day of the year is June 21 with 15.7 hours of daylight and theshortest day is December 21 with 8.3 hours of daylight. Find a formula�� ��� for the number of hours of daylight on the � � day of the year.
PSfrag replacements
-axis
-axis
-axis
� -axi
s(h
ours
ofday
ligh
t) � �� � � �� �� � ��
� � � � � � � � � � � � � � � � � ��� �� -axis (days)
Figure 17.12: Hours of day-light in Seattle in 1994.
Solution. Because the function �� ��� is assumed to be si-
nusoidal, it has the form � � � sin � � �� � � � � � � � � , for con-stants � , � ,
�, and � . We simply need to use the given
information to find these constants. The largest value ofthe function is 15.7 and the smallest value is 8.3. Know-ing this, from the above discussion we can read off :
� � �� � � � ��� � � � �
�� � � � ��� � � � �
To find the period, we need to compute the time between two successivemaximum values of �
� ��� . To find this, we can simply double the timelength of one-half period, which would be the length of time betweensuccessive maximum and minimum values of �
� ��� . This gives us theequation
����� � days between June 21 and December 21 � � � � � � � ��� �Locating the final constant
�requires the most thought. Recall, the
longest day of the year is June 21, which is day 172 of the year, so
� � �day with max daylight ��� � � � � � � ���� � � � � � �
In summary, this shows that
�� ��� � � � sin
� ��� ��� � � � � � � � � � � � �A rough sketch, following the procedure outlined above, gives this graphon the domain � � ��� ; we have included the mean line � � � forreference.

17.2. EXAMPLES OF SINUSOIDAL BEHAVIOR 243
We close with the example that started this section.
Example 17.2.2. The depth of a migrating salmon below the water sur-face changes according to a sinusoidal function of time. The fish variesbetween 1 and 5 feet below the surface of the water. It takes the fish1.571 minutes to move from its minimum depth to its successive maximumdepth. It is located at a maximum depth when � �
�� � � � minutes. What
is the formula for the function �� ��� that predicts the depth of the fish after
� minutes? What was the depth of the salmon when it was first spotted?During the first 10 minutes, how many times will the salmon be exactly 4feet below the surface of the water?
PSfrag replacements
-axis
-axis
-axis
��
���
�� �
� �
dep
th
time
Figure 17.13: Depth of a mi-grating salmon.
Solution. We know that �� ��� � � sin
� � �� � � � � � � � , for ap-propriate constants � , � ,
�, and � . We need to use the
given information to extract these four constants. Theamplitude and mean are easily found using the above for-mulas:
� � max depth � min depth� �
� � � ���
� � max depth � min depth� �
�� � � �
The period can be found by noting that the information about the timebetween a successive minimum and maximum depth will be half of aperiod (look at the picture in Figure 17.13):
� � � � � � � � � � � �Finally, to find
�we
� � (time of maximum depth) � � � ��� � � � � � � �� � � � � �
The formula is now
�� ��� ��� sin
� ��� � � � � � � � � � � � ��� sin� � � � � � �
The depth of the salmon when it was first spotted is just
�� � � ��� sin
� � � � � � �� ��� feet.
Finally, graphically, the last question amounts to determining how manytimes the graph of �
� ��� crosses the line � ��
on the domain [0,10].This can be done using Figure 17.13. A simultaneous picture of thetwo graphs is given, from which we can see the salmon is exactly 4 feetbelow the surface of the water six times during the first 10 minutes.

244 CHAPTER 17. SINUSOIDAL FUNCTIONS
17.3 ExercisesProblem 17.1. Find the amplitude, period, aphase shift and the mean of the following si-nusoidal functions.
(a) � � sin � � � ��� � � �
(b) � � ! sin � � ����� �(c) � � � sin � � � � � � �(d) � �� ! � sin
��$ � �
�� � ��� � �
(e) � ��� � sin� �
������ � � ���& �
(f) � � � � � sin � ��� �#� � � � � � � � � �����(g) � � ���� � sin
� �
�� � � �& ��� � � � �
Problem 17.2. A weight is attached to a springsuspended from a beam. At time � � � , itis pulled down to a point 10 cm above theground and released. After that, it bounces upand down between its minimum height of 10cm and a maximum height of 26 cm, and itsheight
� � ��� is a sinusoidal function of time � .It first reaches a maximum height 0.6 secondsafter starting.
(a) Follow the procedure outlined in thissection to sketch a rough graph of
� � ��� .Draw at least two complete cycles of theoscillation, indicating where the maximaand minima occur.
(b) What are the mean, amplitude, phaseshift and period for this function?
(c) Give four different possible values forthe phase shift.
(d) Write down a formula for the function� � ��� in standard sinusoidal form; i.e. asin 17.1.1 on Page 236.
(e) What is the height of the weight after0.18 seconds?
(f) During the first 10 seconds, how manytimes will the weight be exactly 22 cmabove the floor? (Note: This problemdoes not require inverse trigonometry.)
Problem 17.3. A respiratory ailment called“Cheyne-Stokes Respiration” causes the vol-ume per breath to increase and decrease in asinusoidal manner, as a function of time. Forone particular patient with this condition, a
machine begins recording a plot of volume perbreath versus time (in seconds). Let � ��� be afunction of time � that tells us the volume (inliters) of a breath that starts at time � . Dur-ing the test, the smallest volume per breathis 0.6 liters and this first occurs for a breaththat starts 5 seconds into the test. The largestvolume per breath is 1.8 liters and this firstoccurs for a breath beginning 55 seconds intothe test.
(a) Find a formula for the function � ���whose graph will model the test data forthis patient.
(b) If the patient begins a breath every 5seconds, what are the breath volumesduring the first minute of the test?
Problem 17.4. Suppose the high tide in Seat-tle occurs at � � ��� a.m. and � � ��� p.m. at whichtime the water is ��� feet above the height oflow tide. Low tides occur ! hours after hightides. Suppose there are two high tides andtwo low tides every day and the height of thetide varies sinusoidally.
(a) Find a formula for the function � � � � ���that computes the height of the tideabove low tide at time � . (In other words,� � � corresponds to low tide.)
(b) What is the tide height at ��� � ��� a.m.?
Problem 17.5. Use the method of Sec-tion 17.1.1 to roughly sketch the graph of thegiven sinusoidal function: � � �� sin � �� � � ��� � � ��� � � � .Problem 17.6. Your seat on a Ferris Wheel isat the indicated position at time � � � .
53 feetStart
PSfrag replacements
-axis-axis
-axis

17.3. EXERCISES 245
Let � be the number of seconds elapsed afterthe wheel begins rotating counterclockwise.You find it takes 3 seconds to reach the top,which is 53 feet above the ground. The wheelis rotating 12 RPM and the diameter of thewheel is 50 feet. Let � � ��� be your height abovethe ground at time � .
(a) Argue that � � ��� is a sinusoidal function,describing the amplitude, phase shift,period and mean.
(b) When are the first and second times youare exactly 28 feet above the ground?
(c) After 29 seconds, how many times willyou have been exactly 28 feet above theground?
Problem 17.7. The angle of elevation of thesun above the horizon at noon is � � � on De-cember 21, the 355th day of the year. The el-evation is
� � at noon on June 21, the 172ndday of the year. These elevations are the min-imum and maximum elevations at noon forthe year. Assume this particular year has 366days and that the elevation on day � is givenby a sinusoidal function � � ��� .
(a) Follow the procedure outlined in thissection to sketch a rough graph of � � ��� .Draw at least two complete cycles of theoscillation, indicating where the maximaand minima occur. What are the mean,amplitude, phase shift and period forthis function?
(b) Give four different possible values forthe phase shift.
(c) Write down a formula for the function� � ��� . Confirm it is consistent with thegraph in (a).
(d) What is the elevation at noon Febru-ary 7? (January has 31 days and we’recounting January 1 as the first day ofthe year.)
Problem 17.8. Here is a graph of the function� � sin � � � � sin � � � �
PSfrag replacements
-axis-axis
-axis
Is this function sinusoidal? Give a reason.
Problem 17.9. In Exercise 15.15, we studiedthe situation below: A bug has landed on therim of a jelly jar and is moving around the rim.The location where the bug initially lands isdescribed and its angular speed is given. Im-pose a coordinate system with the origin atthe center of the circle of motion. In each ofthe cases, the earlier exercise found the coor-dinates � � ��� of the bug at time � . Pick threeof the scenarios below and answer these twoquestions:
(a) Both coordinates of � � ��� are sinusoidalfunctions in the variable � ; i.e. � � ��� �� � � ��� � � � ��� � . Put � � ��� and � � ��� in standardsinusoidal form. Find the amplitude,mean, period and phase shift for eachfunction.
(b) Sketch a rough graph of the functions� � ��� and � � ��� in (a) on the domain � � � �� .

246 CHAPTER 17. SINUSOIDAL FUNCTIONS
2 in
bug lands here
ω=4π/9 rad/sec
2 in
1.2 rad
bug lands here
ω=4π/9 rad/sec
1.2 rad
2 in
bug lands here
ω= − 4π/9 rad/sec
2 in
bug lands here
ω=4π/9 rad/sec
2 in
0.5 rad
ω=4π/9rad/sec
rad/secω= − 4π/9
bug lands here
bug lands here
2 in
40o
PSfrag replacements
-axis-axis
-axis

Chapter 18
Inverse Circular FunctionsPSfrag replacements
-axis
-axis
-axis
10
mile
s
100 miles
�
Figure 18.1: An aircraft de-cending toward an airport.
An aircraft is flying at an altitude � miles above the el-evation of an airport. If the airplane begins a steady de-scent 100 miles from the airport, what is the angle
�of
descent?The only natural circular function we can use is
� �tan
� � � , leading to the equation:
tan� � � � �
� � � � �
The problem is that this equation does not tell us the value of�. More-
over, none of the equation solving techniques at our disposal (which allamount to algebraic manipulations) will help us solve the equation for
�.
What we need is an inverse function� � � � �
� � � ; then we could use thefact that tan � �
�tan
� � � � � �and obtain:
� � tan � � � tan� � � � � tan � �
� � � �
Computationally, without even thinking about what is going on, any sci-entific calculator will allow us to compute values of an inverse circularfunction and leads to a solution of our problem. In this example, you willfind
� � tan � � � �� �� � �
� � � . Punch this into your calculator and verify it!
18.1 Solving Three Equations
Example 18.1.1. Find all values of�
(an angle) that make this equationtrue: sin
� � � � �� .
Solution. We begin with a graphical reinterpretation: the solutions corre-spond to the places where the graphs of
� � sin� � � and
� � �� intersect inthe
� �-coordinate system. Recalling Figure 16.11, we can picture these
two graphs simultaneously as below:
247

248 CHAPTER 18. INVERSE CIRCULAR FUNCTIONS
−1
1
PSfrag replacements
-axis
-axis
-axis
�-axis
� -axis
�� � � � � � � � �
one period
cross cross crosscross
Graph of � � ��
Graph of � � sin� � �
� �
Figure 18.2: Where does sin � � � cross�
� �� ?
The first thing to notice is that these two graphs will cross an infi-nite number of times, so there are infinitely many solutions to Exam-ple 18.1.1! However, notice there is a predictable spacing of the crossingpoints, which is just a manifestation of the periodicity of the sine func-tion. In fact, if we can find the two crossing points labeled “ � ” and “ � ”,then all other crossing points are obtained by adding multiples of ��� toeither “ � ” or “ � ”. By Table 15.1,
� � �� radians is a special angle where we
computed sin � � � � � �� , which tells us that the crossing point labeled “A”is the point
� �� � �� � . Using the identities in Facts 16.2.4 and 16.2.5, notice
that
sin� � �� � � sin
�� � � � � �
� � sin�� � � �
� ��� sin
� � � � �� sin
� � � �� � �
So,� � �� is the only other angle
�between 0 and ��� such that Ex-
ample 18.1.1 holds. This corresponds to the crossing point labeled “B”,which has coordinates � �� � �� � . In view of the remarks above, the crossingpoints come in two flavors:� � � � � � � � � � � � � � � � � � � � � � � and� � �� � � � � � � � � � � � � � � � � � � � �
Taking this example as a model, we can tackle the more general prob-lem: For a fixed real number � , describe the solution(s) of the equation

18.1. SOLVING THREE EQUATIONS 249
� � � � � � for each of the circular functions� � � � � � . Studying solutions
of these equations will force us to come to grips with three importantissues:
� For what values of � does� � � � � � have a solution?
� For a given value of � , how many solutions does� � � � ��� have?
� Can we restrict the domain so that the resulting function is one-to-one?
All of these questions must be answered before we can come to grips withany understanding of the inverse functions. Using the graphs of the cir-cular functions, it is an easy matter to arrive at the following qualitativeconclusions.
Important Fact 18.1.2. None of the circular functions is one-to-one onthe domain of all
�values. The equations � � sin
� � � and � � cos� � � have
a solution if and only if � � ; if � is in this range, there are infinitelymany solutions. The equation � � tan
� � � has a solution for any value of �and there are infinitely many solutions.
PSfrag replacements
-axis
-axis
-axis
�
�
�
� �Figure 18.3: What are the
values for � and�?
Example 18.1.3. If two sides of a right triangle havelengths 1 and
� as pictured below, what are the acuteangles and � ?
Solution. By the Pythagorean Theorem the remaining sidehas length
� �
� � � � � � �
Since tan� � � � , we need to solve this equation for .
Graphically, we need to determine where� � � crosses
the graph of the tangent function:From Fact 18.1.2, there will be infinitely many solutions to our equa-
tion, but notice that there is exactly one solution in the interval � � � � � � ���and we can find it using Table 15.1:
tan� � � � tan
� � � � � � sin� � � � �
cos� � � � � �
� � �� �� �� � � � �So, �� � � radians � � � � is the only acute angle solution and � � � � � �� � � � � � � � �� � .

250 CHAPTER 18. INVERSE CIRCULAR FUNCTIONS
PSfrag replacements
-axis
-axis
-axis
� -axis
�-axis
�� � � � � � � � �
� ��� ��
� ��� �
� � � � � � � ��
� � � ��
etc. etc.
one period
only place graphscross in this periodis� � � � � � �
Figure 18.4: Where does the line�
��� cross
�
� tan � ?
18.2 Inverse Circular FunctionsExcept for specially chosen angles, we have not addressed the seriousproblem of FINDING values of the inverse rules attached to the circularfunction equations. (Our previous examples were “rigged”, so that wecould use Table 15.1.) To proceed computationally, we need to obtainthe inverse circular functions. If we were to proceed in a sloppy manner,then a first attempt at defining the inverse circular functions would be towrite
✘ sin � �� � � � solutions
�of the equation
� � sin� � � �
✘ cos � �� � � � solutions
�of the equation
� � cos� � � � (18.1)
✘ tan� � � � � � solutions
�of the equation
� � tan� � � �
There are two main problems with these rules as they stand. First, tohave a solution
�in the case of sin � �
� � � and cos � �� � � , we need to restrict�
so that � � . Secondly, having made this restriction on�
in thefirst two cases, there is no unique solution; rather, there are an infinitenumber of solutions. This means that the rules sin � � , cos � � , and tan � �as they now stand do not define functions. Given what we have reviewedabout inverse functions, the only way to proceed is to restrict each circu-lar function to a domain of
�values on which it becomes one-to-one, then
we can appeal to Fact 11.3.1 and conclude the inverse function makessense.

18.2. INVERSE CIRCULAR FUNCTIONS 251
At this stage a lot of choice (flexibility) enters into determining thedomain on which we should try to invert each circular function. In effect,there are an infinite number of possible choices. If
� � � � � � denotes oneof the three circular functions, there are three natural criteria we useto guide the choice of a restricted domain, which we will call a principaldomain:
� The domain of� � � � should include the angles between 0 and
� � , sincethese are the possible acute angles in a right triangle.
� On the restricted domain, the function� � � � should take on all pos-
sible values in the range of� � � � . In addition, the function should be
one-to-one on this restricted domain.� The function
� � � � should be “continuous” on this restricted domain;i.e. the graph on this domain could be traced with a pencil, withoutlifting it off the paper.
In the case of� � sin
� � � , the principal domain � � � � � � satisfies ourcriteria and the picture is given below. Notice, we would not want to takethe interval � � �� , since
� � sin� � � doesn’t achieve negative values on
this domain; in addition, it’s not one-to-one there.
1
−1
PSfrag replacements
� -axis
� -axis
-axis
� � �� � � � � �
-axis
� -axis
sine restricted toprincipal domain
�
principal domainon the unit circle
Figure 18.5: Principal domain for sin � � � .
In the case of� � cos
� � � , the principal domain � � � satisfies ourcriteria and the picture is given below. Notice, we would not want to takethe interval � � � � � � , since
� � cos� � � doesn’t achieve negative values
on this domain; in addition, it’s not one-to-one there.In the case of
� � tan� � � , the principal domain � � � �
� � satisfies
our criteria and the picture is given below. Notice, we would not want totake the interval � � � , since
� � tan� � � does not have a continuous
graph on this interval; in other words, we do not include the endpointssince tan
� � � is undefined there.
Important Facts 18.2.1 (Inverse circular functions). Restricting eachcircular function to its principal domain, its inverse rule
� � �� � � � �
willdefine a function.

252 CHAPTER 18. INVERSE CIRCULAR FUNCTIONS
1
−1
PSfrag replacements
� -axis
� -axis
-axis
� � �� � � � � �
-axis
� -axis
cosine restricted toprincipal domain
�
principal domainon the unit circle
� ��
Figure 18.6: Principal domain for cos � � � .
(i) If � � , then sin � �� � � is the unique angle
�in the principal
domain � � � � � � with the property that sin� � � � �
.
(ii) If � � , then cos � �� � � is the unique angle
�in the principal
domain � � �� with the property that cos� � � � �
.
(iii) For any real number�, tan � �
� � � is the unique angle�
in the principaldomain � � � �
� � with the property that tan� � � � �
.
We refer to the functions defined above as the inverse circular func-tions. These are sometimes referred to as the “arcsine”, “arccosine” and“arctangent” functions, though we will not use that terminology. The in-verse circular functions give us one solution for each of these equations:
� � cos� � �
� � sin� � �
� � tan� � � �
these are called the principal solutions. We also can refer to these as theprincipal values of the inverse circular function rules
� � � � �� � � .
As usual, be careful with “radian mode” and “degree mode” whenmaking calculations. For example, if your calculator is in “degree”mode and you type in “tan �
� � � � � ”, the answer given is “86.82”. Thismeans that an angle of measure
� � � � � � ��� has tan� � � � � � � � � � � If your
calculator is in “radian” mode and you type in “sin �� � � � � � ”, the answer
given is “1.12”. This means that an angle of measure� � � � � � radians
has sin� � � � � � � � � � �
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis
There is a key property of the inverse circular functions which is use-ful in equation solving; it is just a direct translation of Fact 11.3.2 intoour current context:
Important Facts 18.2.2 (Composition identities). We have the follow-ing equalities involving compositions of circular functions and their inverses:

18.3. APPLICATIONS 253
1
−1
PSfrag replacements
� -axis
� -axis
-axis
� � �� � � � � �
-axis
� -axis
tangent functionrestricted to prin-cipal domain
�
principal domainon the unit circle
Figure 18.7: Principal domain for tan � � � .
(a) If � � � � � � , then sin � ��sin
� � � � � �.
(b) If � � �� , then cos � ��cos
� � � � � �.
(c) If � � � � � � , then tan � �
�tan
� � � � � � �We have been very explicit about the allowed
�values for the equations
in Fact 18.2.2. This is important and an Exercise will touch on this issue.
18.3 ApplicationsAs a simple application of Fact 18.2.2, we can return to the beginning ofthis section and justify the reasoning used to find the angle of descent ofthe aircraft:
� � tan� � � � tan
� � � � � tan� �
� � � � � ��� � � � � rad � �
� � � �Let’s look at some other applications.
Example 18.3.1. Find two acute angles�
so that the following equationis satisfied:��
cos� � � � �
� � � � � � cos
� � � � � �Solution. Begin by multiplying each side of the equation by cos
� � � � andrearranging terms:�� � � � �
� � �� cos� � � � � cos
� � � �� � � � �
� cos� � � ��� � � � � cos
� � � � ��� �

254 CHAPTER 18. INVERSE CIRCULAR FUNCTIONS
To solve this equation for�, we use what is called the technique of substi-
tution. The central idea is to bring the quadratic formula into the pictureby making the substitution
� � cos� � � � :
� � � � � � � � � � � �
� ���� �
Applying the quadratic formula, we obtain
� �� �� � �
� � � �� � � � � � � � �
� � � � �� �� � � � �� �
� � � � ��� or � ����� � � �We now use the fact that
� � cos� � � � and note the cosine of an acute angle
is non-negative to conclude that
cos� � � � ��� � � ��� or cos
� � � � � � � ��� � �cos
� � � ��� � � � � � or cos� � � ��� � �
� ��� �Finally, we use the inverse cosine function to arrive at our two acuteangle solutions:
cos� � � ��� � � � � � � � � cos
� � � � � � � � � � � ��� � �
cos� � � ��� � �
� ��� � � � cos � � � � � �� ��� � � � � � ��� �
������������
������������
� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � �
PSfrag replacements
-axis
-axis
-axis
�
�
� �
Figure 18.8: A ladder prob-lem.
Example 18.3.2. A 32 ft ladder leans against a building(as shown below) making an angle with the wall. OSHA(Occupational Safety and Health Administration) specifiesa “safety range” for the angle to be
� � � � �
. If thebase of the ladder is � � � feet from the house, is this asafe placement? Find the highest and lowest points safelyaccessible.
Solution. If � � � , then sin� � � � �� � , so the principal so-
lution is � sin � � � � �� � � � � � � � ; this lies within the safetyzone. From the picture, it is clear that the highest point safely reachedwill occur precisely when �
� �and as this angle increases, the height�
decreases until we reach the lowest safe height when ��� � �
. We needto solve two right triangles. If �
� �, then
� � � cos���� � � �� � � ft. If
��� � �
, then� � � cos
� � � � � ��� ��� � ft.
Example 18.3.3. A Coast Guard jet pilot makes contact with a smallunidentified propeller plane 15 miles away at the same altitude in a di-rection 0.5 radians counterclockwise from East. The prop plane flies inthe direction 1.0 radians counterclockwise from East. The jet has been in-structed to allow the prop plane to fly 10 miles before intercepting. In whatdirection should the jet fly to intercept the prop plane? If the prop plane isflying 200 mph, how fast should the jet be flying to intercept?

18.3. APPLICATIONS 255
PSfrag replacements
-axis
-axis
-axis
� � � rad
find speed tointercept
� � miles
� �intercept heading
prop planespotted here
Intercept point
� � miles� rad
North
South
East
East
West
Jet
(a) The physical layout.
15
10
PSfrag replacements
� -axis
� -axis
-axis
� � � rad
� rad
prop planespottedhere
Intercept point
� �
� � �
�
�
� � �
Jet
�
�
(b) Modeling the problem.
Figure 18.9: Visualizing theCoast Guard problem.
Solution. A picture of the situation is shown in Fig-ure 18.9(a). After a look at the picture, three right trian-gles pop out and beg to be exploited. We highlight these inthe Figure 18.9(b), by imposing a coordinate system andlabeling the various sides of our triangles. We will workin radian units and label
�to be the required intercept
heading.We will first determine the sides � � and � � � of the
large right triangle. To do this, we have
� �
cos� � � � � � � � � � miles �
� � � cos�� � � � �
��� miles �
� � �
sin� � � � � � � � � miles � and
� � � sin���� � � � �
��
miles �
We now have tan� � � � � �
�� � � � � � �
�� � , so the principal solu-
tion is� ��� � � � � radians, which is about
�� � � � � . This is the
only acute angle solution, so we have found the requiredintercept heading.
To find the intercept speed, first compute yourdistance to the intercept point, which is the lengthof the hypotenuse of the big right triangle: � � �
� � � � � � � � ���� ��� � � � �
�� � � � miles. You need to travel
this distance in the same amount of time � it takes theprop plane to travel 10 miles at 200 mph; i.e. � � � �� � � �� � � � hours. Thus, the intercept speed is
� distance traveledtime � elapsed
� ��� � � �� ��� � �
�� � mph �
Later you will use an alternative approach to this problem using ve-locity vectors.
In certain applications, knowledge of the principal solutions for theequations � � cos
� � � , � � sin� � � , and � � tan
� � � is not sufficient. Here isa typical example of this, illustrating the reasoning required.
Example 18.3.4. A rigid 14 ft pole is used to vault. The vaulter leavesand returns to the ground when the tip is 6 feet high, as indicated. Whatare the angles of the pole with the ground on takeoff and landing?

256 CHAPTER 18. INVERSE CIRCULAR FUNCTIONS
PSfrag replacements
-axis
-axis
-axis
leaving ground airborne returning to ground
� ft � ft� � ft� �
Figure 18.10: Various angles of a vaulter’s pole.PSfrag replacements
� -axis
� -axis
-axis
� � ��� �
��
�
�
Figure 18.11: Modeling theproblem with a unit circle.
Solution. From the obvious right triangles in the picture,we are interested in finding angles
�where sin
� � � � �� � � �
�.
The idea is to proceed in three steps:� Find the principal solution of the equation sin
� � � � ��;
� Find all solutions of the equation sin� � � � �
�;
� Use the constraints of the problem to find and �among the set of all solutions.
Solving the equation sin� � � � �
�involves finding the points
on the unit circle with � -coordinate equal to ��. From the
picture, we see there are two such points, labeled � and � .The coordinates of these points will be � � � cos
� � � ��� and � � � cos
� � � � ��� .
Notice, is the principal solution of our equation sin� � � � �
�, since
� � � � ; so � sin � � � ��� � � � �� � � . In general, the solutions come
in two basic flavors:� � � � � � � � � �
� � � �� � � � � � � � � � � �or
� � � � � � � � � � � �where
� � � � � � � � � � � � � � . To find the angle � , we can use basicproperties of the circular functions:
sin� � � � sin
� � � � sin� � � � sin
� � � � � � � sin
�� �
� � � � � �This tells us � �
� ��� � � .
18.4 How to solve trigonometric equationsSo far, our serious use of the inverse trigonometric functions has focusedon situations that ultimately involve triangles. However, many trigono-metric modeling problems have nothing to do with triangles and so we

18.4. HOW TO SOLVE TRIGONOMETRIC EQUATIONS 257
need to free ourselves from the necessity of relying on such a geomet-ric picture. There are two general strategies for finding solutions to theequations � � sin
� � � � � � cos� � � , and � � tan
� � � :� The first strategy is summarized in Procedure 18.4.1. This method
has the advantage of offering a “prescription” for solving the equa-tions; the disadvantage is you can lose intuition toward interpretingyour answers.
� The second strategy is graphical in nature and is illustrated in Ex-ample 18.4.2 below. This method usually clarifies interpretation ofthe answers, but it does require more work since an essential step isto roughly sketch the graph of the trigonometric function (followingthe procedure of Chapter 17 or using a graphing device).
Each approach has its merits as you will see in the exercises.
Important Procedure 18.4.1. To find ALL solutions to the equations � �sin
� � � � � � cos� � � , and � � tan
� � � , we can lay out a foolproof strategy.
Step Sine case Cosine case Tangent case
1. Find principal solu-tion
� �sin
� � � � � � �cos
� � � � � � �tan
� � � � �2. Find symmetry solu-tion
� �� sin
� � � � � � � � �� cos
� � � � � not applicable
3. Write out multiples ofperiod � � ����� � ��� � ������� � � � � � � � �4. Obtain general princi-pal solutions
� �sin
� � � � � � � � � � �cos
� � � � � � � � � � �tan
� � � � � � � �5. Obtain general sym-metry solutions
� �� sin
� � � � � � � � � � � � �� cos
� � � � � � � � � not applicable
Example 18.4.2. Assume that the number of hours of daylight in yourhometown during 1994 is given by the function �
� ��� � � � sin � � �� � � � � � � � � � � � � � � where � represents the day of the year. Find the days of the year duringwhich there will be approximately 14 hours of daylight?1
Solution. To begin, we want to roughly sketch the graph of � � �� ��� on
the domain � � ��� . If you apply the graphing procedure discussedin Chapter 17, you obtain the sinusoidal graph below on the larger do-main � ��� � � � � (The reason we use a larger domain is so thatthe “pattern” that will arise in the strategy described below is more ev-ident. Ultimately, we will restrict our attention to the smaller domain� �� ��� .) To determine when there will be 14 hours of daylight, weneed to solve the equation
�� �
� ��� . Graphically, this amounts to finding

258 CHAPTER 18. INVERSE CIRCULAR FUNCTIONS
PSfrag replacements
-axis
� -axis
-axis
�� � � � � � � � � � � �
� � � ��� � �
Figure 18.12: Where does the sinusoidal function � � ��� cross the line � � � � .
the places where the line ��� �
intersects the graph of �� ��� . As can be
seen in Figure 18.12, there are several such intersection points.We now outline a “three step strategy” to find all of these intersection
points (which amounts to solving the equation �� �
� ��� ):1. Principal Solution. We will find one solution by using the inverse
sine function. If we start with the function � � sin� ��� on its principal
domain � �� � � � , then we can compute the domain of �� ��� � � � sin � � �� � � � � � � � � � � � � � :
� � � ��� ��� � � � � � � � � ��
� � � � �Now, using the inverse sine function we can find the principal solu-tion to the equation
�� �
� ��� :
�
� � � sin� ��� ��� � � � � � � � � � � � (18.2)
� � � � � � � � sin� ��� ��� � � � � � � � � �
� � � � � � � sin � � � � � � � � � � � � � � � � � � � � � �
� � � � �Notice, this answer is in the domain � � � � . In effect, wehave found THE ONLY SOLUTION on this domain. Conclude thatthere will be about 14 hours of daylight on the
�th day of the year.
1You can get the actual data from the naval observatory at this world wide webaddress: � http://tycho.usno.navy.mil/time.html %

18.4. HOW TO SOLVE TRIGONOMETRIC EQUATIONS 259
2. Symmetry Solution. To find another solution to the equation ��
�� ��� , we will use symmetry properties of the graph of � � �
� ��� . Thisis where having the graph of ��� �
� ��� is most useful. We know thea maxima on the graph occurs at the point
� � � � � � � � � � ; review
Example 17.2.1 for a discussion of why this is the case. From thegraph, we can see there are two symmetrically located intersectionpoints on either side of
�. The principal solution gives the intersec-
tion point�� � � � � � . This point is 58.2 horizontal units to the left of
�; see the picture below. So a symmetrically positioned intersection
point will be� � � � � � � � � � � � � � �� � � � � � .
PSfrag replacements
-axis
� -axis
-axis
�
�� � � � � � � � � � � �
� � � ��� � �
Figure 18.13: Finding the symetry solution.
In other words, � � � �� � � is a second solution to the equation ��
�� ��� . We call this the symmetry solution.
3. Other Solutions. To find all other solutions of �� �
� ��� , we addinteger multiples of the period � � ��� to the � -coordinates of theprincipal and symmetric intersection points. On the domain � ��� � � � we get these six intersection points; refer to the picture ofthe graph:
� � � � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � �� � � � � � � ��� � � � � � � � �So, on the domain � ��� � � � we have these six solutions to theequation
�� �
� ��� :� � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � �
To conclude the problem, we only are interested in solutions in thedomain � � ��� , so the answers are � � � � � � � �� � � ; i.e. on days 114and 230 there will be about 14 hours of daylight.

260 CHAPTER 18. INVERSE CIRCULAR FUNCTIONS
18.5 ExercisesProblem 18.1. Let’s make sure we can handlethe symbolic and mechanical aspects of work-ing with the inverse trigonometric functions:
(a) Set your calculator to “radian mode” andcompute to four decimal places:
(a1) sin� � � ��� , for � � � , � , � � ,
�$� , �� ! ,� $
��� , �
(a2) cos� ��� ��� , for � � � , � , � � ,
�$� , �� ! ,� $
��� , �
(a3) tan� � � ��� , for � � � , � , � � ,
�$� , �� ! ,� $
��� , �
(b) Redo part (a) with your calculator set in“degree mode”.
(c) Find four solutions of sin � � � � � � � ��� �� .
(d) Find four solutions of � : tan � � � � � � ���� ���
Problem 18.2. Assume that the number ofhours of daylight in New Orleans in 1994 isgiven by the function
� � ��� � �$ sin
�� �$ �
� � � � $�
$ �where x represents the number of days afterMarch 21.
(a) Find the number of hours of daylight onJanuary 1, May 18 and October 5.
(b) On what days of the year will there beapproximately 10 hours of daylight?
Problem 18.3. For each part of the problembelow:
� Sketch the graphs of� � ��� and � � ��� on the
same set of axes.� Set
� � ��� � � � ��� and find the principal andsymmetry solutions.
� Indicate the other solutions of the equa-tion
� � ��� ��� � ��� on your graph and de-scribe their relationship to the principaland symmetry solutions.
(a)� � ��� � sin
�� � � �
�, � � ��� � �
$ .
(b)� � ��� � sin
�� � � �
�, � � ��� � � � .
(c)� � � � � sin � � � � ��� , � � ��� � �
�.
(d)� � ��� � ��� cos � � � � ��� � , � � ��� � � � .
Problem 18.4. Suppose
� � ��� � ��� sin�� ���� � � �
� � � !�!
is the temperature (in degrees Fahrenheit) attime � , where � is measured in hours after mid-night on Sunday. You paint the exterior doorto your house at p.m. on Monday. The paintinformation states that 48 hours of
� F dry-ing time is required; i.e., you can only counttime periods when the temperature is at least � F. When will the door be dry?
Problem 18.5. Suppose that you want to runa cable from a power source � out to an off-shore buoy � . The power source is located onland, 200 meters from a straight section of theshoreline, and the buoy is located in the wa-ter, 100 meters out from a point 600 metersdownshore from � ; see picture. The cable willrun in a straight segment from � to the point
� on the shoreline, and then from � in anotherstraight segment out to � .
shoreline
P
S
200m
100m
B
θ
PSfrag replacements
-axis-axis
-axis
(a) Find a formula for the total length � ofthe cable as a function of the picturedangle � .
(b) What value of � will minimize the totallength? Note: You do not need to use agraphing calculator (or calculus) to min-imize the length. Use common sense in-stead. (Hint: What is the shortest dis-tance between two points?)
Problem 18.6. Tiffany and Michael begin run-ning around a circular track of radius 100yards. They start at the locations pictured.Michael is running 0.025 rad/sec counter-clockwise and Tiffany is running 0.03 rad/seccounterclockwise. Impose coordinates as pic-tured.

18.5. EXERCISES 261
Tiff starts here
Michael starts here
0.03 rad/sec
0.025 rad/sec100 yardsr=
PSfrag replacements
-axis-axis
-axis
(a) Where is each runner located (inxy-coordinates) after 8 seconds?
(b) How far has each runner traveled after8 seconds?
(c) Find the angle swept out by Michaelafter � seconds.
(d) Find the angle swept out by Tiffanyafter � seconds.
(e) Find the xy-coordinates of Michael andTiffany after � seconds.
(f) Find the first time when Michael’sx-coordinate is -50.
(g) Find the first time when Tiffany’sx-coordinate is -50.
(h) Find when Tiffany passes Michael thefirst time.
(i) Find where Tiffany passes Michael thefirst time.
(j) Find when Tiffany passes Michael thesecond time.
(k) Find where Tiffany passes Michael thesecond time.
Problem 18.7. Let � � � � ��� � ��� sin � � � � � � � � � � ! .(a) Sketch the graph of � � � � ��� on the do-
main � � ��� ��� . Specify the amplitude,a phase shift, period and mean for thisfunction.
(b) Sketch the graph of � � � � � � � �on the do-
main � � � � ��� . Is � � � � � ��� �a sinusoidal
function?
Problem 18.8. A communications satellite or-bits the earth � miles above the surface. As-sume the radius of the earth is 3,960 miles.The satellite can only “see” a portion of theearth’s surface, bounded by what is called ahorizon circle. This leads to a two-dimensionalcross-sectional picture we can use to study thesize of the horizon slice:
αα
t
CROSS−SECTION
Earth
satellite
center of Earth
satelliteEarth
horizon circle
PSfrag replacements
-axis-axis
-axis
(a) Find a formula for � in terms of � .
(b) If � � ����� ����� miles, what is alpha? Whatpercentage of the circumference of theearth is covered by the satellite? Whatwould be the minimum number of suchsatellites required to cover the circum-ference?
(c) If � � ��� ����� miles, what is alpha? Whatpercentage of the circumference of theearth is covered by the satellite? Whatwould be the minimum number of suchsatellites required to cover the circum-ference?
(d) Suppose you wish to place a satelliteinto orbit so that 20% of the circumfer-ence is covered by the satellite. What isthe required distance � ?
Problem 18.9. Flowing water causes a waterwheel to turn in a CLOCKWISE direction. Thewheel has radius 10 feet and has an angularspeed of � � � �"� rad/sec. Impose a coordinatesystem with the center of the wheel as the ori-gin. The profile of the flowing water is picturedbelow. At time � � � , an unlucky salmon getscaught in the wheel at the pictured location.Distance units will be “feet” and time units willbe “seconds”.

262 CHAPTER 18. INVERSE CIRCULAR FUNCTIONS
water profile
(25,0)
unlucky salmon swimming upstream gets stuckright here
water wheel (radius 10 feet)
9 degreesθ20 rad/sec
PSfrag replacements
� -axis
� -axis
-axis
(a) How long does it take the salmon to com-plete one revolution?
(b) What is the salmon’s linear speed?
(c) What is the equation of the line modelingthe profile of the flowing water?
(d) Where (� � -coordinates) does the salmonget stuck on the wheel?
(e) What is the initial angle � pictured?
(f) Let � � ��� � � � � ��� � � � ��� � be the location ofthe salmon at time � seconds; find theformulas for � � ��� and � � ��� .
(g) Where ( � � -coordinates) is the salmon lo-cated after 0.12 seconds?
(h) When is the salmon first 4 feet to theright of the � -axis?
Problem 18.10. Hugo bakes world famousscones. The key to his success is a specialoven whose temperature varies according to asinusoidal function; assume the temperature(in degrees Fahrenheit) of the oven � minutesafter inserting the scones is given by
� � � � ��� � �� sin� � � �
� �� � � � ��
(a) Find the amplitude, phase shift, periodand mean for � � ��� , then sketch the graphon the domain �� � � �"� minutes.
(b) What is the maximum temperature ofthe oven? Give all times when theoven achieves this maximum tempera-ture during the first 20 minutes.
(c) What is the minimum temperature ofthe oven? Give all times when theoven achieves this minimum tempera-ture during the first 20 minutes.
(d) During the first 20 minutes of baking,calculate the total amount of time theoven temperature is at least 410 � � .
(e) During the first 20 minutes of baking,calculate the total amount of time theoven temperature is at most 425 � � .
(f) During the first 20 minutes of baking,calculate the total amount of time theoven temperature is between 410 � � and425 � � .
Problem 18.11. The temperature in Gavin’soven is a sinusoidal function of time. Gavinsets his oven so that it has a maximum tem-perature of 300 � F and a minimum tempera-ture of 240 � . Once the temperature hits 300 � ,it takes 20 minutes before it is 300 � again.Gavin’s cake needs to be in the oven for 30minutes at temperatures at or above 280 � . Heputs the cake into the oven when it is at 270 �and rising. How long will Gavin need to leavethe cake in the oven?
Problem 18.12. Maria started observing Elas-ticman’s height at midnight. At 3 AM, he wasat his shortest: only 5 feet tall. At 9 AM, hewas at his tallest: 11 feet tall.Elasticman’s height is a sinusoidal function oftime.In the 24 hours after Maria began observingElasticman, how much of the time will Elastic-man be less than 6 feet tall?
Problem 18.13. The angle of elevation of thesun above the horizon at noon is approxi-mately a sinusoidal function of the day ofthe year. The amplitude of this function is23.452 � ; this is the angle at which the earth’saxis is tipped. The period is 365.25 days. Themaximum elevation occurs on June 21, the172nd day of the year. If the latitude wherethe observation is made is � degrees, then themean elevation of the sun is ��� � � degrees.
(a) Find a sinusoidal function � � ��� whichapproximates the elevation of the sun onday � of the year. (Your answer will in-volve the unknown latitude � .)
(b) At noon on the 74th day of the year, youmeasure the elevation of the sun to be39 � 39’ on the UW campus. Use your an-swer to part (a) to determine the latitude
� of the UW campus. Give your answerin degrees and minutes.

18.5. EXERCISES 263
(c) If the latitude � � 40 � , find the time(s)when the angle of elevation of the sun atnoon is �� � .
(d) Imagine you are way up north in Alaskawith a latitude � � 70 � . Sketch the graphof the function � � ��� . Find the day(s)when the sun never rises.
Problem 18.14. Answer the following ques-tions:
(a) If � � sin � ��� on the domain � � � � � � � � ,what is the domain�
and range � of� � � sin � � � ����� � � ? How many solutionsdoes the equation � ��� sin � � � � ��� � � haveon the domain
�and what are they?
(b) If � � sin � ��� on the domain � � � � � � � � ,what is the domain�
and range � of� � � sin � � ���� � � �#� � � � ��� �
� How many solu-tions does the equation ��� � � sin � � ���� � � � ��� � � � � � � have on the domain
�and what
are they?
(c) If � � sin � ��� on the domain � � � � � �� � , what is the domain
�and range �
of � � � sin � � �$ ��� � � �� �� � � � �� . How
many solutions does the equation ��� �� sin � � �$���� � � �
� �� �� � � �� have on the do-main
�and what are they?
(d) If � � cos � ��� on the domain � � � � � ,what is the domain
�and range � of
� � � cos � � � � ����� � ? How many solutionsdoes the equation � � � � cos � � � � ��� � �have on the domain
�and what are
they?
(e) If � � tan � ��� on the domain � � � � ��� � � ,what is the domain�
and range � of � �� tan � � � ���� � ��� ? How many solutionsdoes the equation ����� ��� tan � � � � �� � ���have on the domain
�and what are
they?
Problem 18.15. Let’s make sure we can han-dle the symbolic and mechanical aspects ofworking with the inverse trigonometric func-tions:
(a) Find four solutions of tan � � � � � � � ��� �� .(b) Solve for � : tan
� � � � � � � � � ��� � ��
Problem 18.16. Find the angle � in each ofthe pictures in Figure 18.16.
Problem 18.17. Find the unknown sides andangles in each of the triangles in Figure 18.17.

264 CHAPTER 18. INVERSE CIRCULAR FUNCTIONS
θ
perpendicular to radial line
θ
x=10
θ
slope= 5
y=3x
θ
r=22 r=1 r=3
r=5r=2
θ
x=4
θ
12
r=20
y= - 0.2
PSfrag replacements
-axis
-axis
-axis
Figure 18.14: Circles for Exercise 18.16.
α9
4βx
y
α
1 rad10
x
y
125
x
α
β
20
16
β
γ
α
4
6
6
20 o
xα
xPSfrag replacements
-axis
-axis
-axis
Figure 18.15: Triangles for Exercise 18.17.

Chapter 19
Exponential Functions
If we start with a single yeast cell under favorable growth conditions, thenit will divide in one hour to form two identical “daughter cells”. In turn,after another hour, each of these daughter cells will divide to producetwo identical cells; we now have four identical “granddaughter cells” ofthe original parent cell. Under ideal conditions, we can imagine how this“doubling effect” will continue:
t=0 hours
t=1 hours
t=2 hours
t=3 hours
cells TIME
PSfrag replacements
-axis
-axis
-axis
Figure 19.1: Observing cell growth.
Totalhours
Number ofyeast cells
0 1= � �1 2= � �2 4= � �3 8= � �4 16= � �5 32= � 6 64= � �
Table 19.1: Cell growthdata.
The question is this: Can we find a function of � thatwill predict (i.e. model) the number of yeast cells after �hours? If we tabulate some data (as at right), the conclu-sion is that the formula
� � ��� ���
predicts the number of yeast cells after � hours. Now,let’s make a very slight change. Suppose that insteadof starting with a single cell, we begin with a populationof � � � cells; a more realistic situation. If we assume
265

266 CHAPTER 19. EXPONENTIAL FUNCTIONS
that the population of cells will double every hour, thenreasoning as above will lead us to conclude that the formula
� � ��� � � � � � � � gives the population of cells after � hours. Now, as long as � representsa non-negative integer, we know how to calculate
� � ��� . For example, if� � � , then
� � ��� � � � � � � � �� � � � � � � � � � � � � �� � � � � � � �� � � � � � �
The key point is that computing� � ��� only involves simple arithmetic.
But what happens if we want to know the population of cells after 6.37hours? That would require that we work with the formula
� � ��� � � � � � � � � � ���and the rules of arithmetic do not suffice to calculate
� � ��� . We are stuck,since we must understand the meaning of an expression like � � � � � � Inorder to proceed, we will need to review the algebra required to makesense of raising a number (such as 2) to a non-integer power. We need tounderstand the precise meaning of expressions like: � � � ��� , � � , � � �
, etc.
19.1 Functions of Exponential Type
y = bx
y = xb
this is a variable
this is a fixed number this is a variable
this is a fixed positive integer
Monomial PictureExponential Picture
PSfrag replacements
-axis
-axis
-axis
Figure 19.2: Viewing the difference between exponential and monomial functions.
On a symbolic level, the class of functions we are trying to motivate iseasily introduced. We have already studied the monomials � ��
�, where
was our input variable and � was a fixed positive integer exponent.What happens if we turn this around, interchanging and � , defining anew rule:
� � � � � ��� � � (19.1)

19.1. FUNCTIONS OF EXPONENTIAL TYPE 267
We refer to as the power and � the base. An expression of this sortis called a function of exponential type. Actually, if your algebra is abit rusty, it is easy to initially confuse functions of exponential type andmonomials (see Figure 19.2).
19.1.1 Reviewing the Rules of Exponents
-3
-2
-1
0
1
2
3
-1.5 -1 -0.5 0 0.5 1 1.5
n=2n=4n=6
PS
fragrep
lacemen
ts
-axis
-axis
-axis
-3
-2
-1
0
1
2
3
-1.5 -1 -0.5 0 0.5 1 1.5
n=3n=5n=7
PS
fragrep
lacemen
ts
-axis
-axis
-axis
Figure 19.3: Even and oddmonomials.
To be completely honest, making sense of the expression� � ��� for all numbers requires the tools of Calculus,but it is possible to establish a reasonable comfort levelby handling the case when is a rational number. If � � �and
�
is a positive integer (i.e.� � , � , ,
�, � � � ), then we
can try to solve the equation
� � � � � (19.2)
A solution � to this equation is called an� �
root of� . This leads to complications, depending on whether
�
is even or odd. In the odd case, for any real number � ,notice that the graph of � � � will always cross the graphof � � � � exactly once, leading to one solution of (19.2).
On the other hand, if�
is even and � � , then thegraph of � � � � will miss the graph of � ��� , implying thereare no solutions to the equation in (19.2). (There will becomplex solutions to equations such as � � � � , involv-ing the imaginary complex numbers �
� � ��� , but we
are only working with real numbers in this course.) Also,again in the case when
�
is even, it can happen that thereare two solutions to (19.2). We do not want to constantlyworry about this even/odd distinction, so we will hence-forth assume � � � . To eliminate possible ambiguity, wewill single out a particular
� �-root; we define the sym-
bols:��� � � �� � the largest real
� �root of � � (19.3)
Thus, whereas � are both� �
-roots of 1, we have defined�� � .
In order to manipulate � � ��� for rational , we need to recall somebasic facts from algebra.
Important Facts 19.1.1 (Working with rational exponents). For allpositive integers � and � , and any real number base � � � , we have
��
� ��
��� � � � ��
� � �
For any rational numbers � and , and for all positive bases�
and � :

268 CHAPTER 19. EXPONENTIAL FUNCTIONS
y=tn
y=tn
n even n odd= solution
y=b
y=b*
y=b
no solution or two solutions
exactly one solution
PSfrag replacements
-axis
� -axis� -axis
-axis
-axis
Figure 19.4: How many solutions to � � � ?.
1. Product of power rule: � � � � ��� � � �2. Power of power rule:
�� � � � � � � �
3. Power of product rule:� �� � � � � � � �
4. Zero exponent rule: � � �
5. Negative power rule: � � � � �� These rules have two important consequences, one theoretical and the
other more practical. On the first count, recall that any rational number� can be written in the form � � � � , where � and � are integers. Conse-quently, using these rules, we see that the expression � � � � defines afunction of , whenever is a rational number. On the more practicalside of things, using the rules we can calculate and manipulate certainexpressions. For example,
� � �� � � �� � � � � � � � � �� �
�� �
� �� � � � ��� � � � � � �
The sticky point which remains is knowing that� � � � � � actually
defines a function for all real values of . This is not easy to verify andwe are simply going to accept it as a fact. The difficulty is that we needthe fundamentally new concept of a limit, which is the starting point ofa Calculus course. Once we know the expression does define a function,we can also verify that the rules of Fact 19.1.1 carry through for all real

19.2. THE FUNCTIONS� � ��� ��� 269
exponent powers. Your calculator should have a “� to the key”, allowingyou to calculate expressions such as � � � involving non-rational powers.
Here are the key modeling functions we will work with in this Chapter.
Definition 19.1.2. A function of exponential type has the form
�� � � � ��� � �
for some � � � , � �� , and ��� �� � .We will refer to the formula in Definition 19.1.2 as the standard ex-
ponential form. Just as with standard forms for quadratic and sinu-soidal functions, we sometimes need to do a little calculation to put anequation in standard form. The constant � � is called the initial valueof the exponential function; this is because if represents time, then�� � � � ����� � � ��� is the value of the function at time � � ; i.e. the initial
value of the function.
Example 19.1.3. Write the equations � � � � � and � � � � �� � � � � � in standardexponential form.
Solution. In both cases, we just use the rules of exponents to manueverthe given equation into standard form:
� � � � �� � � � � �� �
� �and
� � � �� �
�� � �
� � �� �
�� �
� � � �
� � � �� �
� � � ��
� �� � �
19.2 The Functions � � � ���
We know� � � � � � defines a function of , so we can study basic qual-
itative features of its graph. The data assembled in the solution of the“Doubling Effect” beginning this Chapter, plus the rules of exponents,produce a number of points on the graph. This graph exhibits four keyqualitative features that deserve mention:

270 CHAPTER 19. EXPONENTIAL FUNCTIONS
� ��� Point on thegraph of
� � � �...
......
-2 1/4 (-2, 1/4)-1 1/2 (-1, 1/2)0 1 (0, 1)1 2 (1, 2)2 4 (2, 4)3 8 (3, 8)...
......
(a) Datapoints from ��� � � .
−1 1
(1,2)
(0,1)
(−1,1/2)
(−2,1/4)
y = 2x
(3,8)
(2,4)PSfrag replacements
-axis
-axis
-axis
(b) Graph of ����� � .
Figure 19.5: Visualizing � � � � .
� The graph is always above the horizontal axis; i.e. the functionvalues are always positive.
� The graph has � -intercept 1 and is increasing.
� The graph becomes closer and closer to the horizontal axis as wemove left; i.e. the -axis is a horizontal asymptote for the left-handportion of the graph.
� The graph becomes higher and higher above the horizontal axis aswe move to the right; i.e., the graph is unbounded as we move tothe right.
We can use these features to argue that � � � � is not the graph of anyfunction we have studied thus far. For example, the graph in Figure 19.5is not the graph of any polynomial, since a polynomial graph never be-comes asymptotic to a horizontal axis. It cannot be a sinusoidal function,since the values are not bounded, etc.
The special case of � ��� � is representative of the function � � � � , butthere are a few subtle points that need to be addressed. First, recall weare always assuming that our base ��� � . We will consider three separatecases: � � , � � , and ��� .
19.2.1 The case��� �
In the case � � , we are working with the function � � � � ; this is nottoo exciting, since the graph is just a horizontal line. We will ignore thiscase.

19.2. THE FUNCTIONS� � ��� ��� 271
19.2.2 The case��� �
If ��� , the graph of the function � � � � is qualitatively similar to thesituation for � � � , which we just considered. The only difference is theexact amount of “concavity” in the graph, but the four features high-lighted above are still valid. Figure 19.6(a) indicates how these graphscompare for three different values of � . Functions of this type exhibitwhat is typically referred to as exponential growth ; this codifies the factthat the function values grow rapidly as we move to the right along the -axis.
all graphs pass through (0,1)
PSfrag replacements
� -axis
� -axis
-axis
(a) Graph of � � � , % � .
all graphs pass through (0,1)
PSfrag replacements
� -axis
� -axis
-axis
(b) Graph of � � � ,� � � � .
Figure 19.6: Visualizing cases for .
19.2.3 The case ��� � � �
We can understand the remaining case � � , by using the remarksabove and our work in Chapter 9. First, with this condition on � , noticethat �� � , so the graph of � � � �� � � is of the type in Figure 19.6(a). Now,using the rules of exponents:
� ��� � � � �
� �� � � � � � � � � �
By the reflection principle, the graph of � � � �� � � � is obtained by re-flecting the graph of � � �
�� � � about the � -axis. Putting these remarkstogether, if � � , we conclude that the graph of � � � � will looklike Figure 19.6(b). Notice, the graphs in Figure 19.6(b) share qualitativefeatures, mirroring the features outlined previously, with the “asymptote”and “unbounded” portions of the graph interchanged. Graphs of this sortare often said to exhibit exponential decay, in the sense that the functionvalues rapidly approach zero as we move to the right along the -axis.
Important Facts 19.2.1 (Features of Exponential Type Functions).Let � be a positive real number, not equal to 1. The graph of � � � � hasthese four properties:

272 CHAPTER 19. EXPONENTIAL FUNCTIONS
1. The graph is always above the horizontal axis.
2. The graph has � -intercept 1.
3. If � � (resp. � � ), the graph becomes closer and closer to thehorizontal axis as we move to the left (resp. move to the right); thissays the -axis is a horizontal asymptote for the left-hand portion ofthe graph (resp. right-hand portion of the graph).
4. If � � (resp. � � ), the graph becomes higher and higher abovethe horizontal axis as we move to the right (resp. move to the left);this says that the graph is unbounded as we move to the right (resp.move to the left).
If ��� � � , the graph of the function � � ������� is a vertically expanded orcompressed version of the graph of � � � � . If ��� � , we additionallyreflect about the -axis.
19.3 Piano Frequency RangeA sound wave will cause your eardrum to move back and forth and thiscan be modeled using sinusoidal functions. In the case of a so-calledpure tone, this motion is modeled by a single sinusoidal function of theform
�� ��� � � sin
� ��� � ��� �where
�is called the frequency, in units of “periods/unit time”, called
“Hertz” and abbreviated “Hz”. The coefficient � is related to the actualdisplacement of the eardrum, which is, in turn, related to the loudnessof the sound. A person can typically perceive sounds ranging from 20 Hzto 20,000 Hz.
A B DC E F G A B C D E F G A B C D E F G A B C D E F G A B C D E F G A B C D E F G A B C D E F G A B C
D#C# F#G#A# A# C# D# F#G#A# C#D# F#G#A# C# D# F#G#A# C# D# F#G#A# C# D# F#G#A# C# D# F#G#A#
220 Hzmiddle C
PSfrag replacements
-axis
-axis
-axis
Figure 19.7: A piano keyboard.
A piano keyboard layout is shown in Figure 19.7. The white keys arelabelled A, B, C, D, E, F, and G, with the sequence running from left toright and repeating for the length of the keyboard. The black keys fit intothis sequence as “sharps”, so that the black key between A and B is “A

19.3. PIANO FREQUENCY RANGE 273
sharp”, denoted A#. Thus, starting at any A key, the 12 keys to the rightare A, A#, B, C, C#, D, D#, E, F, F#, G, and G#. The sequence then repeats.Notice that between some adjacent pairs of white keys there is no blackkey.
A piano keyboard is commonly tuned according to a rule requiringthat each key (white and black) has a frequency � � � � � times the frequencyof the key to its immediate left. This makes the ratio of adjacent keysalways the same ( � � � � � ), and it means that keys 12 keys apart have a ratioof frequencies exactly equal to 2 (since
� � ��� � � � � � � � ). Two such keys aresaid to be an octave apart. Assuming that the key A below middle C hasa frequency of 220 Hz, we can determine the frequency of every key onthe keyboard. For instance, the A# to the right of this key has frequency� ��� ��� � � � � � � ��� � � � � � � � �� � � � � � � � � ��� � � � �
�. The B to the right of this
key has frequency � � � � � � � � � � � � � ���� � � � � � � �
�.

274 CHAPTER 19. EXPONENTIAL FUNCTIONS
19.4 ExercisesProblem 19.1. Let’s brush up on the requiredcalculator skills. Use a calculator to approxi-mate:
(a) � �
(b) � �� � �
(c) � �
(d) ��$
(e) � � �(f)
���� �
� �
(g) � �� ��$�� sin � ���$ � �(h) sin
� � � � � � �
Problem 19.2. Put each equation in standardexponential form:
(a) � � � � � � � �(b) � � � � ��� �(c) � � � �
�
(d) � � ���$� $����
(e) � ��
�
� $ ��� ���
(f) � � � � �� �������#��! � � � � � � � �
Problem 19.3. (a) Begin with the function� � � � ��� ��� � .(a1) Rewrite each of the following func-
tions in standard exponential form:� � � ��� , � � � � ��� , � � � � � ��� , � � � � � � ��� � ,� � � ��� , � � � � � � � ��� �
(a2) Is the function � � � � � � � ��� � � � a func-tion of exponential type?
(a3) Sketch the graphs of� � ��� � � � � ��� � � � � � � �
��� � � � � � � � � � ��� � and � � � � � � � ��� � � �in the same coordinate systemand explain which graphical op-eration(s) (vertical shifting, verticaldilation, horizontal shifting, hori-zontal dilation) have been carriedout.
(b) In general, explain what happens whenyou apply the four construction tools ofChapter 9 (vertical shifting, vertical dila-tion, horizontal shifting, horizontal dila-tion) to the standard exponential model� � � � � . For which of the four op-erations is the resulting function still astandard exponential model?
Problem 19.4. According to the Merck Man-ual, the relationship between the height
�(in
inches), weight � (in pounds) and surface area� (in square meters) for a human is approxi-mated by the equation:
� � �� ����� � ��
� �����
�
� ����
meter �
Fix�
to be your height, in inches. Let � � ��� � �be the resulting function computing your sur-face area as a function of your weight � . Whatis your surface area? How much weight mustyou gain for your surface area to increase by5%? Decrease by 2%?
Problem 19.5. Begin with a sketch of thegraph of the function � � � � on the domainof all real numbers. Describe how to use the“four tools” of Chapter 9 to obtain the graphsof these functions: � � � � � , � � � � � , � � � � � � � ,� � �
$ � �� � , � � � � � � , � � � � � � , � � � ��� � ,
� ��� � � � , � ���"$ � , � � � ��� $ .Problem 19.6. A colony of yeast cells is esti-mated to contain ����� cells at time � � � . Aftercollecting experimental data in the lab, you de-cide that the total population of cells at time �hours is given by the function
��� ��� ����
� � ���� � �
(a) How many cells are present after onehour?
(b) (True or False) The population of yeastcells will double every 1.4 hours.
(c) Cherie, another member of your lab,looks at your notebook and says : ...thatformula is wrong, my calculations pre-dict the formula for the number of yeastcells is given by the function
� � ��� � � � � ��� � � � � ����$���� � � Should you be worried by Cherie’s re-mark?

19.4. EXERCISES 275
(d) Anja, a third member of your lab work-ing with the same yeast cells, took thesetwo measurements:
����! � ����� cells after4 hours; ��!& "� � � ���"� cells after 6 hours.Should you be worried by Anja’s results?If Anja’s measurements are correct, doesyour model over estimate or under esti-mate the number of yeast cells at time� ?
Problem 19.7. (a) Find the frequency ofmiddle C.
(b) Find the frequency of A above middle C.
(c) What is the frequency of the lowest noteon the keyboard? Is there a way to solvethis without simply computing the fre-quency of every key below � ����� ?
(d) The Bosendorfer piano is famous, due inpart, to the fact it includes additionalkeys at the left hand end of the key-board, extending to the C below the bot-tom A on a standard keyboard. Whatis the lowest frequency produced by aBosendorfer?
Problem 19.8. You have a chess board as pic-tured, with squares numbered 1 through 64.You also have a huge change jar with an un-limited number of dimes. On the first squareyou place one dime. On the second square youstack 2 dimes. Then you continue, always dou-bling the number from the previous square.
(a) How many dimes will you have stackedon the 10th square?
(b) How many dimes will you have stackedon the th square?
(c) How many dimes will you have stackedon the 64th square?
(d) Assuming a dime is 1 mm thick, howhigh will this last pile be?
(e) The distance from the earth to the sunis approximately 150 million km. Relatethe height of the last pile of dimes to thisdistance.
1 2 3 8
10 9
63 64
PSfrag replacements
-axis-axis
-axis
Problem 19.9. Myoglobin and hemoglobin areoxygen carrying molecules in the human body.The function
� � ��� � � � ���� �
calculates the fraction of myoglobin saturatedwith oxygen at a given pressure � torrs. Forexample, at a pressure of 1 torr, ��� ��� � �� ,which means half of the myoglobin (i.e. 50%)is oxygen saturated. (Note: More precisely, youneed to use something called the “partial pres-sure”, but the distinction is not important forthis problem.) Likewise, the function
� � � � � � � � � ��
��! � ��� � � �
�
calculates the fraction of hemoglobin satu-rated with oxygen at a given pressure � .Hemoglobin is found inside red blood cells,which flow from the lungs to the musclesthrough the bloodstream. Myoglobin is foundin muscle cells.
(a) The graphs of ��� � � and � � � � are givenbelow on the domain � � � � ����� ; whichis which?

276 CHAPTER 19. EXPONENTIAL FUNCTIONS
20 40 60 80 100p
0.2
0.4
0.6
0.8
1fraction
PSfrag replacements
-axis-axis
-axis
(b) If the pressure in the lungs is 100 torrs,what is level of oxygen saturation of thehemoglobin in the lungs?
(c) The pressure in an active muscle is 20torrs. What is the level of oxygen satu-ration of myoglobin in an active muscle?What is the level of hemoglobin in an ac-tive muscle?
(d) Define the efficiency of oxygen transportat a given pressure � to be ��� � � � � � � � .What is the oxygen transport efficiencyat 20 torrs? At 40 torrs? At 60 torrs?Sketch the graph of ��� � � � � � � � ; arethere conditions under which transportefficiency is maximized (explain)?

Chapter 20
Exponential Modeling
Example 20.0.1. A computer industry spokesperson has predicted thatthe number of subscribers to geton.com, an internet provider, will grow ex-ponentially for the first 5 years. Assume this person is correct. If geton.comhas 100,000 subscribers after 6 months and 750,000 subscribers after 12months, how many subscribers will there be after 5 years?
Solution. The solution to this problem offers a template for many expo-nential modeling applications. Since, we are assuming that the numberof subscribers
� � � , where represents years, is a function of exponentialtype,
� � � � � � � � �for some
� � and � � . We are given two pieces of information about thevalues of
� � � :� � � � � � � � � � � � � � i.e.,
� ��� � � � � � ��� � � � and� � � � � � � � � � � � i.e.,
� ��� � � � � ��� � � �We can use these two equations to solve for the two unknowns
� � and �as follows: If we divide the second equation by the first, we get
� �� � � � � � �� � � ��� � � � � �
� � � � �� � � � � � � � �
Plugging this value of � into either equation (say the first one), we cansolve for
� � : � � � � � ��� � � �� � � � � � � � � � ���� . We conclude that the number ofgeton.com subscribers will be predicted by
� � � � � � �� ��� � � � � � � �In five years, we obtain
� ��� � � � � � � � ���� � � � � � ��� � � subscribers, which ex-ceeds the population of the Earth (which is between 5 and 6 billion)!
277

278 CHAPTER 20. EXPONENTIAL MODELING
0.2 0.4 0.6 0.8 1
200000
400000
600000
800000
P
QPSfrag replacements
-axis
-axis
-axis
Figure 20.1: Finding theequation for � � ��� � � � � .
There are two important conclusions we can draw fromthis problem. First, the given information provides uswith two points on the graph of the function
� � � :� � � � � � � � � � � � � �
� � � � � � � ��� � � � �
More importantly, this example illustrates a very impor-tant principal we can use when modeling with functionsof exponential type.
Important Fact 20.0.2. A function of exponential type can be determinedif we are given two data points on its graph.
When you use the above strategy to find the base�
of the exponen-tial model, make sure to write down a lengthy decimal approximation.As a rule of thumb, go for twice as many significant digits as you areotherwise using in the problem.
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis
20.1 The Method of Compound InterestYou walk into a Bank with � � dollars (usually called principal), wishingto invest the money in a savings account. You expect to be rewarded bythe Bank and paid interest, so how do you compute the total value of theaccount after � years?
The future value of the account is really a function of the number ofyears � elapsed, so we can write this as a function � � ��� . Our goal is to seethat � � ��� is a function of exponential type. In order to compute the futurevalue of the account, the Bank provides any savings account investorwith two important pieces of information:
� � annual (decimal) interest rate� � the number of compounding periods per year
The number�
tells us how many times each year the Bank will computethe total value � � ��� of the account. For example, if
� � , the calculationis done at one-year intervals; if
� � � , the calculation is done eachmonth, etc. The bank will compute the value of your account after atypical compounding period by using the periodic rate of return
�� . For
example, if the interest rate percentage is 12% and the compoundingperiod is monthly (i.e.,
� � � ), then the annual (decimal) interest rate is0.12 and the periodic rate is � � � �
�� ��� � � .
The number � always represents the decimal interest rate, which is adecimal between 0 and 1. If you are given the interest rate percentage(which is a positive number between 0 and 100), you need to convertto a decimal by dividing by 100.
CAUTION!!!
!!!
PSfrag replacements
-axis
-axis
-axis

20.1. THE METHOD OF COMPOUND INTEREST 279
20.1.1 Two ExamplesLet’s consider an example: � � � $ ��� � � invested at the annual interestpercentage of � % compounded yearly, so
� � and � � � ��� � . To computethe value � � � after one year, we will have
� � � � ��� � (periodic rate) � �� ��� � � ��� � ��� � � � �� $ ��� � � � � � � � � � � $ � � � � �
To compute the value after two years, we need to apply the periodicrate to the value of the account after one year:
� � � � � � � � � (periodic rate) � � �� ��� � � � � � � ��� � � � � � ��� � � � � �� $ ��� � � � � � � � � � � � $ � ��� � � � �
Notice, the amount the Bank has paid after two years is $166.40, whichis slightly bigger than twice the $80 paid after one year. To compute thevalue after three years, we need to apply the periodic rate to the value ofthe account after two years:
� � � � � � � � � (periodic rate) � � � �� ��� � � � � � � � ��� � � � � � � ��� � � � � �� $ ��� � � � � � � � � � � � $ � � � � � � �
Again, notice the amount the Bank is paying after three years is $259.71,which is slightly larger than three times the $80 paid after one year.Continuing on in this way, to find the value after � years, we arrive at theformula
� � ��� � ��� � � � � � $ ��� � � � ��� � � �
In particular, after 5 and 10 years, the value of the account (to the nearestdollar) will be $1,469 and $2,159, respectively.
As a second example, suppose we begin with the same $1,000 andthe same annual interest percentage � %, but now compound monthly,so
� � � and � � � � � � . The value of the account after one compoundingperiod is � � � � � , since a month is one-twelfth of a year. Arguing asbefore, paying special attention that the periodic rate is now
�� � � � � �
�� , we
have
� � � � � � ��� � (periodic rate) � �� ���
� � � � �
� �� $ ��� � � � � � � � ������� � ��� $ ��� ��� � � � �

280 CHAPTER 20. EXPONENTIAL MODELING
After two compounding periods, the value is � � ��� � � ,� � ��� � ��� � � � � � � (periodic rate) � � � � �
� ���� � ��� �
� � �� � � � �
� � ������ � � �
� �� ���
� � ��� �
� ��
� $ � � � � � � � ��� ������� � � � � $ ��� � �� � �Continuing on in this way, after
�compounding periods have elapsed,
the value will be � � ��� � , which is computed as
� � � � � ��� ���� � ��� �
� � ��
It is possible to rewrite this formula to give us the value after � years,noting that � years will lead to � � compounding periods; i.e., set
� � � �in the previous formula:
� � ��� � ������ � � �
� � ��
For example, after 1, 5 and 10 years, the value of the account, to thenearest dollar, would be $1,083, $1,490, and $2,220.
20.1.2 Discrete CompoundingThe two examples above highlight a general formula for computing thefuture value of an account.
Important Fact 20.1.1 (Discrete compounding). Suppose an account isopened with ��� principal. If the decimal interest rate is � and the number ofcompounding periods per year is
�
, then the value � � ��� of the account after� years will be
� � ��� � ������ �
� � � �Notice, the future value � � ��� is a function of exponential type; the base
is the number � �� �� � , which will be greater than one. Since � �� � , the
graph will be qualitatively similar to the ones pictured in Figure 19.6(a).
Example 20.1.2. At birth, your Uncle Hans secretly purchased a $5,000U.S. Savings Bond for $2,500. The conditions of the bond state that theU.S. Government will pay a minimum annual interest rate of � � � � � � %,compounded quarterly. Your Uncle has given you the bond as a gift, subjectto the condition that you cash the bond at age 35 and buy a red Porsche.

20.2. THE NUMBER � AND THE EXPONENTIAL FUNCTION 281
On your way to the Dealer, you receive a call from your tax accountantinforming you of a 28% tax on the capital gain you realize through cashingin the bond; the capital gain is the selling price of the bond minus thepurchase price. Before stepping onto the showroom floor, compute howmuch cash will you have on hand, after the U.S. Government shares inyour profits.
Solution. The value of your bond after 35 years is computed by the for-mula in Fact 20.1.1, using � � � $ � � � � � , � � � � � � � � ,
� ��, and � � � .
Plugging this all in, we find that the selling price of the bond is
� � � � � $ � � � � � ��� � � � � � �� � � � � � � $
� � � � � � � �
The capital gain will be $51,716.42 - $2,500 = $49,216.42 and the taxdue is $(49,216.42)(0.28) = $13,780.60. You are left with $51,716.42 -$13,780.60 = $37,935.82. Better make that a used Porsche!
20.2 The Number � andthe Exponential Function
What happens to the future value of an investment of � � dollars as thenumber of compounding periods is increased? For example, return toour earlier example: � � � $ � � � and an annual interest percentage of � %.After 1 year, the table below indicates the value of the investment forvarious compounding periods: yearly, quarterly, monthly, weekly, daily,and hourly.
� CompoundingPeriod
Value after 1 year(to nearest dol-lar)
1 yearly $ � � � � � � � ��� � � � = $1,080.00
4 quarterly $ � � � � � � � � � �� � � = $1,082.43
12 monthly $ ��� � � � �� � � � �
�� � � � = $1,083.00
52 weekly $ ��� � � � �� � � � � � � � = $1,083.22
365 daily $ ��� � � � �� � � � �� � � � � = $1,083.28
8,760 hourly $ ��� � � � �� � � � �
� � � � � � � � � � � =$1,083.29

282 CHAPTER 20. EXPONENTIAL MODELING
We could continue on, considering “minute” and “second” compoundingand what we will find is that the value will be at most $1,083.29. Thisillustrates a general principal:
Important Fact 20.2.1. Initially increasing the number of compoundingperiods makes a significant difference in the future value; however, even-tually there appears to be a limiting value.
Let’s see if we can understand mathematically why this is happening.The first step is to recall the discrete compounding formula:
� � ��� � ������ �
� � � �If our desire is to study the effect of increasing the number of compound-ing periods, this means we want to see what happens to this formula as�
gets BIG. To analyze this, it is best to rewrite the expression using asubstitution trick: Set
� � � � , so that� � � � and
�� � �� . Plugging in, we
have
� � ��� � ���� � �
� � �
� ���� � � � � �
� ���� �
� � � � � � �
(20.1)
So, since � is a fixed number and� � � � , letting
�
get BIG is the sameas letting
�become BIG in (20.1). This all means we need to answer
this new question: What happens to the expression � � �� � �
as�
becomeslarge? On the one hand, the power in the expression is getting large; atthe same time, the base is getting close to 1. This makes it very trickyto make quick predictions about the outcome. It is best to first tabulatesome numerical data for the values of � � �
� � � � � � �� � �
and look at aplot of this function graph on the domain � ��� � � � : See Figure 20.2.
You can see from this plot, the graph of � � � � �� � �
approaches the“dashed” horizontal asymptote, as
�becomes BIG. We will let the letter “ ”
represent the spot where this horizontal line crosses the vertical axis and ��� � � � � � � . This number is only an approximation, since is known tobe an irrational number. What sets this irrational number apart from theones you are familiar with (e.g.
� � , � , etc.) is that defining the number requires a “limiting” process. This will be studied a lot more in yourCalculus course. The new number is a positive number greater than 1,so we can study the function:
� � � � (20.2)
Since � , the graph will share the properties in Figure 19.6(a). Thisfunction is usually referred to as THE exponential function. Scientificcalculators will have a key of the form “ exp
� � ” or “ � ”.

20.2. THE NUMBER � AND THE EXPONENTIAL FUNCTION 283
� ����� ���� �1 22 2.253 2.370374 2.441420 2.65329100 2.704811000 2.71692
� �
2.71828
(a) Datapoints for���� � � .
20 40 60 80 100
0.5
1
1.5
2
2.5
PSfrag replacements
-axis
-axis
-axis
(b) The graph of���� � � .
Figure 20.2: What happens when�
get very large?
20.2.1 Calculator drillPlugging in � , you can compute an approximation to on your cal-culator; you should get � � � � � to four decimal places. Make sureyou can compute expressions like � , � , and
� � � � � ; to four decimal
places, you should get ��� ��� � ��� , � � � � � , and � � � � � .20.2.2 Back to the original problem...We can now return to our future value formula (20.1) and conclude thatas the number of compounding periods increases, the future value isapproaching a limiting value:
� � ��� � ���� �
� � � � � �
� � ��� � �The right hand limiting formula � � ��� � � � � computes the future valueusing what is usually referred to as continuous compounding. From theinvestors viewpoint, this is the best possible scheme for computing futurevalue.
Important Fact 20.2.2 (Continuous compounding). The future valueof ��� dollars principal invested at an annual decimal interest rate of � un-der continuous compounding after � years is � � ��� � � � � ; this value is al-ways greater than the value of � � � � �
� � � , for any discrete compoundingscheme. In fact, � � � is the limiting value.

284 CHAPTER 20. EXPONENTIAL MODELING
20.3 ExercisesProblem 20.1. In 1968, the U.S. minimumwage was $1.60 per hour. In 1976, the min-imum wage was $2.30 per hour. Assume theminimum wage grows according to an expo-nential model � � ��� , where � represents the timein years after 1960.
(a) Find a formula for � � ��� .(b) What does the model predict for the min-
imum wage in 1960?
(c) If the minimum wage was $5.15 in 1996,is this above, below or equal to what themodel predicts.
Problem 20.2. The town of Pinedale,Wyoming, is experiencing a population boom.In 1990, the population was 860 and five yearslater it was 1210.
(a) Find a linear model � � ��� and an expo-nential model � � ��� for the population ofPinedale in the year 1990+x.
(b) What do these models estimate the pop-ulation of Pinedale to be in the year2000?
Problem 20.3. Return to the Earning PowerProblem in 4.1. Use the data in Table 4.1 toobtain exponential models ��� ��� and �� ��� forMen’s and Women’s Earning power in the year��� � � � , respectively. What will be the earn-ings in 1997? In 2010? In 2100? From thesecalculations, what can you say about whetherwomen are gaining on men?
Problem 20.4. Tiffany is a model rocket en-thusiast. She has been working on a pres-surized rocket filled with laughing gas. Ac-cording to her design, if the atmospheric pres-sure exerted on the rocket is less than 10pounds/sq.in., the laughing gas chamber in-side the rocket will explode. Tiff worked froma formula � � � � � � � � $ � � � pounds/sq.in. forthe atmospheric pressure
�miles above sea
level. Assume that the rocket is launched atan angle of � above level ground at sea levelwith an initial speed of 1400 feet/sec. Also,assume the height (in feet) of the rocket attime � seconds is given by the equation � � ��� �� ��!���� � � ����� sin � � � � .
(a) If the angle of launch is � � ��� � , de-termine the minimum atmospheric pres-sure exerted on the rocket during itsflight. Will the rocket explode in mid-air?
(b) If the angle of launch is � � � � � , de-termine the minimum atmospheric pres-sure exerted on the rocket during itsflight. Will the rocket explode in mid-air?
(c) Assume that the maximum elevationto avoid premature explosion is 3.8526miles. Find the largest launch angle �so that the rocket will not prematurelyexplode.
Problem 20.5. Given the initial information� � � � and , banks will sometimes provide anadditional percentage rate called the effectiveyield. This is understood to be an annualinterest rate � % which would yield the sameamount at the end of one year under onecompounding as the given data under com-poundings.
(a) If � � dollars is invested at an annual rateof% compounded quarterly, what is the
effective yield?
(b) If � � dollars is invested at an an-nual rate of 6.75% continuously com-pounded, what is the effective yield?
Problem 20.6. In 1989, research scientistspublished a model for predicting the cumu-lative number of AIDS cases reported in theUnited States:
� � ��� � ����� � ��� � �
��� � $ � � thousands �
where � is the year. This paper was considereda “relief”, since there was a fear the correctmodel would be of exponential type. Pick twodata points predicted by the research model� � ��� to construct a new exponential model � ���for the number of cumulative AIDS cases. Dis-cuss how the two models differ and explain theuse of the word “relief”.

20.3. EXERCISES 285
Problem 20.7. Define two new functions:
� � cosh � ��� � ��� �
� �
�and
� � sinh � ��� � �� � �
� �
�
These are called the basic hyperbolic trigono-metric functions.
(a) Sketch rough graphs of these two func-tions.
(b) The graph of the equation � � � � � � �is shown below; this is called the unithyperbola. For any value � , show thatthe point � � � � � � � cosh � � � � sinh � ��� � is onthe unit hyperbola. (Hint: Verify that� cosh � ��� � � � � sinh � � � � � � � , for all � .)
(−1,0)
y
x(1,0)
PSfrag replacements
-axis-axis
-axis
(c) A hanging cable is modeled by a portionof the graph of the function
� � � cosh � � ��
�� � � �
for appropriate constants � � � and � .The constant
�depends on how the co-
ordinate system is imposed. A cable fora suspension bridge hangs from two 100ft. high towers located 400 ft. apart. Im-pose a coordinate system so that the pic-ture is symmetric about the � -axis andthe roadway coincides with the � -axis.The hanging cable constant is � � "���and
� � � . Find the minimum distancefrom the cable to the road.
400 ft
100 ftd
cable
roadway
towers
PSfrag replacements
-axis-axis
-axis

286 CHAPTER 20. EXPONENTIAL MODELING

Chapter 21
Logarithmic Functions
If we invest � � � $ � � � � at an annual rate of � � � % compounded contin-uously, how long will it take for the account to have a value of $5000?
The formula � � ��� � ��� � � � � � � gives the value after � years, so we need
to solve the equation:� ��� � � � � � � � � � � � � � � � � � �
Unfortunately, algebraic manipulation will not lead to a further simplifi-cation of this equation; we are stuck! The required technique involves thetheory of inverse functions. Assuming we can find the inverse function of� � ��� � , we can apply
� � �� ��� to each side of the equation and solve for � :
� � ���� � � � � �
� � � � � � � � � � ����
� � � � � � ���� � � �
The goal in this section is to describe the function� � � , which is usually
denoted by the symbol� � �
� ��� � ln� ��� and called the natural logarithm
function. On your calculator, you will find a button dedicated to thisfunction and we can now compute ln
��� � � �� � � � � . Conclude that thesolution is � � ��� � � years.
21.1 The Inverse Function of � � �
If we sketch a picture of the exponential function on the domain of all realnumbers and keep in mind the properties in Fact 19.2.1, then every hor-izontal line above the -axis intersects the graph of ��� � exactly once:See Figure 21.1(a). The range of the exponential function will consistof all possible � -coordinates of points on the graph. Using the graphicaltechniques of Chapter 6, we can see that the range of will be all POSITIVEreal numbers: See Figure 21.1(b).
287

288 CHAPTER 21. LOGARITHMIC FUNCTIONS
−1 1
y = ex
graphs of y=c,c>1 cross exponentialgraph exactly once.
these horizontallines miss graphof exponential function.
PSfrag replacements
-axis
-axis
-axis
(a) Horizontal line test for� � �
�.
range = allpositive numbers
domain = all real numbers−1 1
y = exPSfrag replacements
-axis
-axis
-axis
(b) The domain and rangefor � � �
�.
Figure 21.1: Properties needed to find the inverse of� � ��� � �
�.
By the horizontal line test, this means the exponential function is one-to-one and the inverse rule
� � ��� � will define a function
� � ��� � �
������ �����
�the unique solu-tion of the equation� � � � � if � � ��undefined � � if ��� �
(21.1)
x
1−1
reflecting line y = xy = e
y=ln (x)
PSfrag replacements
-axis
-axis
-axis
Figure 21.2: Visualizing the��� ln � ��� .
This inverse function is called the natural logarithmfunction, denoted ln
�� � . We can sketch the graph of the
the natural logarithm as follows: First, by Fact 11.2.1,the domain of the function ln
�� � � is just the range of
the exponential function, which we noted is all positivenumbers. Likewise, the range of the function ln
�� � � is
the domain of the exponential function, which we notedis all real numbers. Interchanging and � , the graph ofthe natural logarithm function ��� ln
� � can be obtainedby flipping the graph of � �� � across the line � � :
Important Facts 21.1.1 (Graphical features of natural log). The func-tion � � ln
� � has these features:
� The largest domain is the set of positive numbers; e.g. ln� � � makes
no sense.
� The graph has -intercept 1 and is increasing.
� The graph becomes closer and closer to the vertical axis as we ap-proach � � ; i.e. the � -axis is a vertical asymptote for the graph.
� The graph is unbounded as we move to the right.
Any time we are working with an inverse function, symbolic propertiesare useful. Here are the important ones related to the natural logarithm.

21.1. THE INVERSE FUNCTION OF� � � � 289
Important Facts 21.1.2 (Natural log properties). We have the followingproperties:
(a) For any real number , ln� � � �� .
(b) For any positive number , ln � � � �� .(c) ln
�� � � � ln
�� � , for ��� � and � any real number;
(d) ln��� � � ln
� � � � ln�� � , for all
� � � � � ;(e) ln � � � � � ln
�� � � ln
��� � , for all� � � � � .
The properties (c)-(e) are related to three of the rules of exponents inFacts 19.1.1. Here are the kinds of basic symbolic maneuvers you canpull off using these properties:
Examples 21.1.3.
(i) ln� �� � � ln
� � � � � � � � ; ln� � � � � ln
� � � � ln� � � � � � � � � ; ln � � � �
ln� ��� ln
��� � � � � � � � � .(ii) ln � � � � ln � � � � � � �� ln
� � ; ln � � � � � ln� � � � � � � � � ln
� � � �ln� � � ; ln
���
��� �
� � ln � � � ln � � � � � �ln� ��� ln � � � � .
Examples 21.1.4.
(i) Given the equation � � � � � , we can solve for : � � � � �ln � � � � � � ln
� � �� � � ln � � � ln� � �
� ln� � �
ln� � � � � ��� � �
(ii) Given the equation tan�� � � � , we can solve for :
tan�� � � �
ln � tan�� � � � ln
� � �tan
� � � ln� � � � � �� �
��� � � ��� � � � �where
�is any integer � � � � � � � � � � .
Example 21.1.5. If $2,000 is invested in a continuously compoundingsavings account and we want the value after 12 years to be $130,000,what is the required annual interest rate? If, instead, the same $2,000is invested in a continuously compounding savings account with � � � � � %annual interest, when will the exact account value be be $130,000?

290 CHAPTER 21. LOGARITHMIC FUNCTIONS
Solution. In the first scenario,
��� � � � � � � ��� � � � � �� � �� � � �ln� � � � � ln � � � � �
ln� � � � � � �� � ln
� � � � � � � �� � � � �
This gives an annual interest rate of 34.79%. In the second scenario, westudy the equation
��� � � � � � � ��� � � � � � � � � � � � �� � � � � � � � � � ln
� � � �� ����� � � � � � � � �
So, it takes over 65 years to accumulate $130,000 under the secondscheme.
21.2 Alternate form forfunctions of exponential type
The standard model for an exponential function is �� ��� � ����
, for some
� � � , � �� , and ��� �� � . Using the properties of the natural logarithmfunction,
� � � ln � � � � �� ln
� � � �This means that every function as in Definition 19.1.2 can be re-writtenusing the exponential function
. Another way of saying this is that you
really only need the function keys “ ” and “ ln
� ��� ” on your calculator.
Important Fact 21.2.1 (Observation). A function of exponential type canbe written in the form
�� ��� � ���
� �for some constants ��� ���� and
� �� � .By studying the sign of the constant
�, we can determine whether the
function exhibits exponential growth or decay. For example, given thefunction �
� ��� � �
, if�� � (resp.
� � ), then the function exhibits
exponential growth (resp. decay).
Examples 21.2.2.

21.3. THE INVERSE FUNCTION OF� � � � 291
(a) The function �� ��� � ��� � � � � exhibits exponential growth and can be
re-written as:
�� ��� � ��� � � ln
� � � � ����� � � � � � � � (b) The function �
� ������ � � � � exhibits exponential decay and can be re-
written as:
�� ��� �
� � � � � �
� � � � � � � � � � � � � � � � �21.3 The Inverse Function of � � �
For some topics in Chemistry and Physics (e.g. acid base equilibria andacoustics) it is useful to have on hand an inverse function for � � � � ,where ��� � and � �� . Just as above, we would show that
� � � � � � isone-to-one, the range is all positive numbers and obtain the graph usingideas in Figure 21.2. We will refer to the inverse rule as the logarithmfunction base b, denoted log � � � , defined by the rule:
log � � � � �
������ �����
�the unique solu-tion of the equation� ��� � � � if � � ��undefined � � if � �� �
We will need to consider two cases, depending on the magnitude of � :The important qualitative features of the logarithm function ��� �
� �� � �
mirror Fact 21.1.1:
x
1−1
y = b
y=log (x)b
1−1
reflecting line y = xreflecting line y = x y = bx
y=log (x)b
The case b > 1 The case 0 < b < 1
PSfrag replacements
-axis
-axis
-axis
Figure 21.3: Cases to consider for .

292 CHAPTER 21. LOGARITHMIC FUNCTIONS
Important Facts 21.3.1 (Graphical features of general logs). The func-tion � � log � � � has these features:
� The largest domain is the set of positive numbers; e.g. log � � � � is notdefined.
� The graph has -intercept 1 and is increasing if � � (resp. decreas-ing if � �� ).
� The graph becomes closer and closer to the vertical axis as we ap-proach � � ; this says the � -axis is a vertical asymptote for thegraph.
� The graph is unbounded as we move to the right.
Important Facts 21.3.2 (Log properties). Fix a positive base � , � �� .
(a) For any real number , log � � ����� � .(b) For any positive number , � log �
�� � �� .
(c) log � � � � � � log � � � � , for � � � and � any real number;
(d) log � � ��� � log � � � � � log � � �� , for all � � � � ;(e) log � � � � � � log � � � � � log � � �� , for all � � �� � .It is common to simplify terminology and refer to the function log � � �
as the log base b function, dropping the longer phrase “logarithm”. Somescientific calculators will have a key devoted to this function. Other cal-culators may have a key labeled “log
� � ”, which is usually understoodto mean the log base 10. However, many calculators only have the key“ln
� � ”. This is not cause for alarm, since it is always possible to expresslog � � � in terms of the natural log function. Let’s see how to do this, sinceit is a great application of the Log Properties listed in Fact 21.3.2.
Suppose we start with � � log � � � . We will rewrite this in terms of thenatural log by carrying out a sequence of algebraic steps below; makesure you see why each step is justified.
� � log � � �� � �
ln�� � � � ln
� �� ln
�� � � ln
� �� � ln
� �ln�� � �
We have just verified a useful conversion formula:

21.3. THE INVERSE FUNCTION OF� � � � 293
Important Fact 21.3.3 (Log conversion formula). For a positive num-ber and ����� � � �� a base,
log � � � � ln� �
ln�� � �
For example,
log � ���� � � ln
��� �ln� � � � � � � � �
log � � � �� � � ln
� �
ln� � ��� � � � � � � � �
log� ��� � � ln
��� �
ln� ��� � � � � � � �
The conversion formula allows one to proceed slightly differently whensolving equations involving functions of exponential type. This is illus-trated in the next example.
Example 21.3.4. Ten years ago, you purchased a house valued at $80,000.Your plan is to sell the house at some point in the future, when the valueis at least $1,000,000. Assume that the future value of the house canbe computed using quarterly compounding and an annual interest rate of�� � %. How soon can you sell the house?
Solution. We can use the future value formula to obtain the equation
��� � � � � � � � � � ��� � �� � � � �
��� � �
� � � � ���� � � �
Using the log base � � � � � ,log � � � � �
� � � � � � log � � � � � � � � � � � � �
log � � � � �� � � � � � �
�� � ln
� � � � ��
ln���� � � �
� � � � � �Since you have already owned the house for 10 years, you would need towait nearly 43 years to sell at the desired price.
Let’s try our hand at a problem that uses both the inverse trigono-metric functions and the inverse of the exponential function. We will usepreliminary graphical reasoning as an aide.
Example 21.3.5. The voltage output of a circuit at time � is given by thefunction � � � � ��� � �
sin� � . During the first 10 seconds, when is the voltage
equal to 8 volts?

294 CHAPTER 21. LOGARITHMIC FUNCTIONS
2 4 6 8 10
2
4
6
8
10
12
PSfrag replacements
-axis
� -axis
-axis
Figure 21.4: The graph of���� � sin
� � �.
Solution. If we look at a software plot of � � � � ��� and � � �in the same coordinate system, we see the two graphscross four times on the domain � � � . This meansthere will be four solutions to the equation � � � � ��� , cor-responding to the � -coordinates of the four intersectionpoints: See Figure 21.4.
The computation is easy to begin:� sin
�� � � �ln � � sin
�� � � � ln� � �
ln��� � � ln � sin
�� � � � ln� � �
sin� ��� ��� �
� � �We now use the technique explained in Chapter 18 to solve this equa-tion. This requires we find the principal solution using the inverse sinefunction:
� � sin � �� � �� � � ��� �
�� � �
Next, we find the symmetry solution:
� � � sin � � � � �� � � � ����� �� � � �
Finally, we conclude EVERY solution has the form:
� � � � ��� � � � � � � or
� � �� � � � � � � � where� ��� � � � � � � � � �
We need to find which of these solutions are between 0 and 10. This isjust a calculation:
� ��� ��� � � � �� � � � � � ��� � � � � � � ��� �
21.4 Measuring the Loudness of SoundAs we noted earlier, the reception of a sound wave by the ear gives rise toa vibration of the eardrum with a definite frequency and a definite am-plitude. This vibration may also be described in terms of the variation ofair pressure at the same point, which causes the eardrum to move. Theperception that rustling leaves and a jet aircraft sound different involvestwo concepts: (1) the fact that the frequencies involved may differ; (2)the intuitive notion of “loudness”. This loudness is directly related to theforce being exerted on the eardrum, which we refer to as the intensityof the sound. We can try to measure the intensity using some sort of

21.4. MEASURING THE LOUDNESS OF SOUND 295
scale. This becomes challenging, since the human ear is an amazing in-strument, capable of hearing a large range of sound intensities. For thatreason, a logarithmic scale becomes most useful. The sound pressurelevel � of a sound is defined by the equation
� � � log � ������ � � (21.2)
where�� is an arbitrary reference intensity which is taken to correspond
with the average faintest sound which can be heard and�is the intensity
of the sound being measured. The units used for � are called decibels,abbreviated “db”. (Historically, the units of loudness were called bels,in honor of Alexander Graham Bell, referring to the quantity log � �
� �� � � .)
Notice, in the case of sound of intensity� � � � , we have a sound pressure
level of
� � � log � ������� � � � log � �
� � � � � � � � � �
We refer to any sound of intensity�� as having a sound pressure level
at the threshold of hearing. At the other end of the scale, a sound ofintensity the maximum the eardrum can tolerate has an average soundpressure level of about 120 db. The Table 21.5(a) gives a hint of thesound pressure levels associated to some common sounds.
Source of Noise Sound PressureLevel in db
Threshold of pain 120Riveter 95Busy Street Traffic 70Ordinary Conversation 65Quiet Auto 50Background Radio 40Whisper 20Rustle of Leaves 10Threshold of Hearing 0
(a) Sources of noise levels.
0
20
40
60
80
100
120
20 100 1000 10,000 20,000
Zone of Hearing
Hz
db
pain threshold
hearing threshold
PSfrag replacements
-axis
-axis
-axis
(b) Graphing noise levels.
Figure 21.5: Considering noise levels.
It turns out that the above comments on the threshold of hearing andpain are really only averages and depend upon the frequency of the givensound. In fact, while the threshold of pain is on average close to 120db across all frequencies between 20 Hz and 20,000 Hz, the thresholdof hearing is much more sensitive to frequency. For example, for a tone

296 CHAPTER 21. LOGARITHMIC FUNCTIONS
of 20 Hz (something like the ground-shaking rumble of a passing freighttrain), the sound pressure level needs to be relatively high to be heard;100 db on average. As the frequency increases, the required sound pres-sure level for hearing tends to drop down to 0 db around 2000 Hz. Anexamination by a hearing specialist can determine the precise sensitiv-ities of your ear across the frequency range, leading to a plot of your“envelope of hearing”; a sample plot is given in Figure 21.5(b). Such aplot would differ from person to person and is helpful in isolating hearingproblems.
Example 21.4.1. A loudspeaker manufacturer advertises that their modelno. 801 speaker produces a sound pressure level of 87 db when a refer-ence test tone is applied. A competing speaker company advertises thattheir model X-1 speaker produces a sound pressure level of 93 db whenfed the same test signal. What is the ratio of the two sound intensities pro-duced by these speakers? If you wanted to find a speaker which producesa sound of intensity twice that of the no. 801 when fed the test signal,what is its sound pressure level?
Solution. If we let�
� and� � refer to the sound intensities of the two speak-
ers reproducing the test signal, then we have two equations:
� � � � log � �� �
��� �� � � log � �
� � ��� �
Using log properties, we can solve the first equation for�
� :
� � � � log � ����
��� � � � log � �
� �� ��� � log � �
� �� �
log � �� �� � � � � � � log � �
� �� �
� log � � � � � � � � � � � � log � � � � � ��
� � � � � � � log � � � � � � � � � � � � � �
Similarly, we find that� � � � � � � � � . This means that the ratio of the inten-
sities will be� ��
�� � � � � � �
� � � � � � � � � � � � � � � �This means that the test signal on the
� � speaker produces a soundpressure level nearly 4 times that of the same test signal on the no. 801speaker.
To finish the problem, imagine a third speaker which produces asound pressure level � , which is twice that of the first speaker. If
� �

21.4. MEASURING THE LOUDNESS OF SOUND 297
is the corresponding intensity of the sound, then as above,� � � � � � � � ��� � � .
We are assuming that� � ��� � � , so this gives us the equation
�
� ��� �
� � � � � � � � �
� � � � ��� � �log � � � � � � � � � log � �
�� �
� � � � ��� �� � � � log � �
�� � � log � � � � � � � � ��� �
� � � � � � ���� � � � � � �� � � �
So, the test signal on the third speaker must produce a sound pressurelevel of 90 db.

298 CHAPTER 21. LOGARITHMIC FUNCTIONS
21.5 ExercisesProblem 21.1. These problems will help youdevelop your skills with logarithms.
(a) Compute: log � � , log � ��� , log �� � , log � ��� ,log �
� � .(b) Solve for � : �� � �
�, log $ � � � , log $ �� � $ .
(c) Solve each of these equations for � interms of � : � � ��� � , � � � ��� � , � � ����$ � .
Problem 21.2. As light from the surface pene-trates water, its intensity is diminished. In theclear waters of the Caribbean, the intensity isdecreased by 15 percent for every 3 meters ofdepth. Thus, the intensity will have the formof a general exponential function.
(a) If the intensity of light at the water’s sur-face is
�� , find a formula for
� � � � , the in-tensity of light at a depth of � meters.Your formula should depend on
�� and
� .(b) At what depth will the light intensity be
decreased to 1% of its surface intensity?
Problem 21.3. Rewrite each function in theform � � � � �
� �, for appropriate constants � �
and � .
(a) � � ��� � � � �(b) � ��� � �� � �(c) � � � � �� �! � � � $(d) � � � � � � ������ � �(e) � � � � ��� ��� � � �
Problem 21.4. The Richter Scale is used tomeasure the strength of an earthquake. Thetypical unit is � � log �
� � ���� � , where
�� is the
minimal intensity one can detect and�
is thequake intensity.
(a) Discuss the ratio of the intensity be-tween earthquakes measuring 6 and 7on the Richter scale.
(b) Suppose an earthquake is measured 8.2on the Richter scale and an aftershockis one-third the intensity. What is themeasurement of the aftershock on theRichter scale?
(c) Immediately after the February 28, 2001Seattle earthquake, there were variousreports concerning the actual Richterscale reading. These ranged from 6.5to 7.2 on the Richter scale. How muchmore intense is a 7.2 earthquake com-pared to a 6.5 earthquake.
Problem 21.5. (a) If you invest � � dollarsat
% annual interest and the future
value is computed by continuous com-pounding, how long will it take for yourmoney to double?
(b) Suppose you invest � � dollars at � % an-nual interest and the future value iscomputed by continuous compounding.If you want the value of the account todouble in 2 years, what is the requiredinterest rate?
(c) A rule of thumb used by many people todetermine the length of time to doublean investment is the rule of 70. The rulesays it takes about � � �
�
� years to dou-ble the investment. Graphically comparethis rule to the one isolated in part b. ofthis problem.
Problem 21.6. Recall Exercise 20.7 on Page285. Potomac Power Co. needs to install anew powerline from the top of a cliff to thelevel ground below, as pictured. If we imposea coordinate system so that the origin is at thebase of pole “A”, the hanging cable is modeledby a portion of the graph of� � ��� � ����� cosh � � � "������ ��� � � At the position labeled “P”, the powerline is ex-actly 20 feet above the ground, which is theminimum distance from the ground to the ca-ble.
B
A 50 ft
50 ft 100 ft
PPSfrag replacements
-axis-axis
-axis

21.5. EXERCISES 299
(a) Find the height of poles “A” and “B”.
(b) What portion of the powerline is at least25 feet above the level ground?
(c) What portion of the cable is above thelevel of the cliff top?
(d) What is the horizontal distance from thebase of pole “B” to the cable?
Problem 21.7. The length of some fish aremodeled by a von Bertalanffy growth function.For Pacific halibut, this function has the form
� � ��� ���"��� � � � �� � �! � � � � � � � �where
� � ��� is the length (in centimeters) of afish � years old.
(a) What is the length of a new-born halibutat birth?
(b) Use the formula to estimate the lengthof a 6–year–old halibut.
(c) At what age would you expect the hal-ibut to be 120 cm long?
(d) What is the practical (physical) signifi-cance of the number 200 in the formulafor
� � ��� ?
Problem 21.8. A cancerous cell lacks nor-mal biological growth regulation and can di-vide continuously. Suppose a single mouseskin cell is cancerous and its mitotic cell cy-cle (the time for the cell to divide once) is 20hours. The number of cells at time � growsaccording to an exponential model.
(a) Find a formula � � ��� for the number ofcancerous skin cells after � hours.
(b) Assume a typical mouse skin cell isspherical of radius "� � ��� � � cm. Find thecombined volume of all cancerous skincells after � hours. When will the volumeof cancerous cells be 1 cm $ ?
Problem 21.9. Your Grandfather purchaseda house for $55,000 in 1952 and it has in-creased in value according to a function � �� � ��� , where � is the number of years owned.These questions probe the future value of thehouse under various mathematical models.
(a) Suppose the value of the house is$75,000 in 1962. Assume � � ��� is a linearfunction. Find a formula for � � ��� . Whatis the value of the house in 1995? Whenwill the house be valued at $200,000?
(b) Suppose the value of the house is$75,000 in 1962 and $120,000 in 1967.Assume � � ��� is a quadratic function.Find a formula for � � ��� . What is thevalue of the house in 1995? When willthe house be valued at $200,000?
(c) Suppose the value of the house is$75,000 in 1962. Assume � � ��� is a func-tion of exponential type. Find a formulafor � � ��� . What is the value of the housein 1995? When will the house be valuedat $200,000?
Problem 21.10. Solve the following equationsfor � :
(a) log $ � �� � log � � ���(b) ��� log �
� ��� � �(c) �
� ��
(d) log � � ln � ��� � � �(e) �
� � ����
(f) �"$ �� �
�����(g) � sin � ��� � �
�
Problem 21.11. A ship embarked on a longvoyage. At the start of the voyage, there were500 ants in the cargo hold of the ship. Oneweek into the voyage, there were 800 ants.Suppose the population of ants is an exponen-tial function of time.
(a) How long did it take the population todouble?
(b) How long did it take the population totriple?
(c) When were there be 10,000 ants onboard?
(d) There also was an exponentially-growingpopulation of anteaters on board. Atthe start of the voyage there were17 anteaters, and the population ofanteaters doubled every 2.8 weeks. Howlong into the voyage were there 200 antsper anteater?

300 CHAPTER 21. LOGARITHMIC FUNCTIONS
Problem 21.12. The populations of termitesand spiders in a certain house are growing ex-ponentially. The house contains 100 termitesthe day you move in. After 4 days, the housecontains 200 termites. Three days after mov-ing in, there are two times as many termitesas spiders. Eight days after moving in, therewere four times as many termites as spiders.
How long (in days) does it take the popula-tion of spiders to triple?
Problem 21.13. The voltage output(in volts) ofan electrical circuit at time � seconds is givenby the function
� � ��� ��� $ sin � ��� � $ �
� � � (a) What is the initial voltage output of the
circuit?
(b) Is the voltage output of the circuit everequal to zero? Explain.
(c) The function� � ��� � ���
� � �, where � � ��� �
� sin � � � � � � � � � . Put the sinusoidalfunction � � ��� in standard form andsketch the graph for � � � � � . Label thecoordinates of the extrema on the graph.
(d) Calculate the maximum and minimumvoltage output of the circuit.
(e) During the first second, determine whenthe voltage output of the circuit is 10volts.
(f) A picture of the graph of � � � � ��� on thedomain � � � � � is given; label the coor-dinates of the extrema on the graph.
0.2 0.4 0.6 0.8 1t axis
2.5
5
7.5
10
12.5
15
volts
PSfrag replacements
-axis-axis
-axis
(g) Restrict the function� � ��� to the domain
� � � � � �� � ; explain why this functionhas an inverse and find the formula forthe inverse rule. Restrict the function� � ��� to the domain � � � � � � ; ex-plain why this function has an inverseand find the formula for the inverse rule.
Problem 21.14. A contractor has just builta retaining wall to hold back a sloping hill-side. To monitor the movement of the slopethe contractor places marker posts at the po-sitions indicated in the picture; all dimensionsare taken in units of meters. Assume that thehillside moves as time goes by and the hillsideprofile is modeled by a function � � � ��� after years. In Exercise 8.7 on Page 120, we showed
��� � � � � � � � �� � � � � � � � � � �� � ���
� � �� �
Find when the hillside first starts to spill overthe retaining wall.
5
2
wall
1
3
markers hillside profileat time wallis constructed
3 3
PSfrag replacements
-axis-axis
-axis
Problem 21.15. In 1987, the population ofMexico was estimated at 82 million people,with an annual growth rate of 2.5%. The 1987population of the United States was estimatedat 244 million with an annual growth rateof 0.7 %. Assume that both populations aregrowing exponentially.
(a) When will Mexico double its 1987 popu-lation?
(b) When will the United States and Mexicohave the same population?
Problem 21.16. The cities of Abnarca andBonipto have populations that are growing ex-ponentially. In 1980, Abnarca had a popula-tion of 25,000 people. In 1990, its populationwas 29,000.
Bonipto had a population of 34,000 in 1980.The population of Bonipto doubles every 55years.

21.5. EXERCISES 301
(a) How long does it take the population ofAbnarca to double?
(b) In what year will Abnarca’s populationequal that of Bonipto?
Problem 21.17. The average tenure of a Pro-fessor at the University of Washington is 31.6years. The administration believes that aProfessor’s salary after 31.6 years of serviceshould be 2.5 times his/her “hiring in” salary.Assume the Professor’s salary grows with con-tinuous compounding according to this con-straint.
(a) What is the annual rate � of salarygrowth (to the nearest 0.1%)?
(b) Assume inflation grows at an annualrate of � � � � %, compounded continu-ously. If a Professor is hired at $30,000,what is the inflation adjusted buyingpower of his/her salary at retirement af-ter 40 years of service?
Problem 21.18. Return to the Earning PowerProblem in 20.3. Using the data in Table 4.1,you obtained exponential models �� ��� ��!���! � �� � � �� � and ��� ��� � � �� � � �� ��!�! �"� � � for
Women’s and Men’s Earning power in the year��� � � � , respectively. Is there a time whenwomen and men have equal earning power? Ifso, when?
Problem 21.19. Due to the tremendous startof the �"����� season for the Mariners, peopleare jumping on the bandwagon by joining theteams fan club. After the third game, therewere �"��� ����� members in the Mariners fan club.After ��� games, there were ����� ��� members ofthe fan club.
(a) Develop an exponential model describ-ing the number of members of the fanclub as function of the number of gamesplayed in the season.
(b) At the all-star break, after�
games, howmany members are in the fan club?
(c) If there are � �� � ���! members of the Yan-kees fan club, during which game willthe Mariners have as many members inthe fan club as the Yankees?
Problem 21.20. Complete Table 21.1 onpage 302.

302 CHAPTER 21. LOGARITHMIC FUNCTIONS
����������� � � � �������������� � �������Point on � ���������
Point on � ���������
��� � � ��� ������� � � � � � � � � �%� ��� � � � ����� � � ��� �� � � � �� � � � � �
� � �#� � � � � � �� � � � � � � ! �� ��
Table 21.1: Complete this table for Exercise 21.20.

Chapter 22
Parametric Equations
Imagine a car is traveling along the highway and you look down at thesituation from high above:PSfrag replacements
-axis
-axis
-axis
car
highway
moving point (dynamic)
curve (static)
Figure 22.1: The dynamic motion of a car on a static highway.
We can adopt at least two different viewpoints: We can focus on theentire highway all at once, which is modeled by a curve in the plane;this is a “static viewpoint”. We could study the movement of the caralong the highway, which is modeled by a point moving along the curve;this is a “dynamic viewpoint”. The ideas in this chapter are “dynamic”,involving motion along a curve in the plane; in contrast, our previouswork has tended to involve the “static” study of a curve in the plane. Wewill combine our understanding of linear functions, quadratic functionsand circular functions to explore a variety of dynamic problems.
303

304 CHAPTER 22. PARAMETRIC EQUATIONS
22.1 Parametric Equations
PSfrag replacements
-axis
-axis
-axis
PowerPunch
� � � � � � � ��� Gatorade� � � � � � � ���
tim
��� � � � � ���michael
(a) Tim and Michaelrunning towardrefreshments.
PSfrag replacements
-axis
-axis
-axis
��� � ���
� � � � � � � ��� � � � � � � � ���
� � � � � � ���� � � � � ��� � �� � � �Tim’s line of travel
Michael’s line of travel
(b) Modeling Tim andMichael as points moving
on a path.
Figure 22.2: Visualizingmoving points.
Example 22.1.1. After a vigorous soccer match, Tim andMichael decide to have a glass of their favorite refreshment.They each run in a straight line along the indicated pathsat a speed of 10 ft/sec. Will Tim and Michael collide?
Solution. As a first step, we can model the lines alongwhich both Tim and Michael will travel:
Michael’s line of travel:� � � �
� �� and
Tim’s line of travel: �� � � �
�� �
�� � � � � � �
It is an easy matter to determine where these two linescross: Set
� � � � �� � and solve for , getting � � � , so
the lines intersect at � � � � � � � � � � � .
Unfortunately, we have NOT yet determined if the run-ners collide. The difficulty is that we have found wherethe two lines of travel cross, but we have not worriedabout the individual locations of Michael and Tim alongthe lines of travel. In fact, if we compute the distance fromthe starting point of each person to � , we find:
dist(Mike, � ) �� � � � � � � � � � �� � � � � � ���� � � �� � feet
dist(Tim, � ) �� � � � � � � � � � � ��� � � � � � � � �� �� � � � � feet
Since these distances are different and both runners have the samespeed, Tim and Michael do not collide!
22.2 Motivation: Keeping track of a bugPSfrag replacements
� -axis
� -axis-axis �
Figure 22.3: A bug on yourdesktop.
Imagine a bug is located on your desktop. How can youbest study its motion as time passes?
Let’s denote the location of the bug when you first ob-served it by � . If we let � represent time elapsed since firstspotting the bug (say in units of seconds), then we can let
� � ��� be the new location of the bug at time � . When � � � ,which is the instant you first spot the bug, the location
� � � ��� � is the initial location. For example, the path followed by the bugmight look something like the dashed path in the next Figure; we haveindicated the bug’s explicit position at four future times: � � � � � � � � .

22.3. EXAMPLES OF PARAMETRIZED CURVES 305
PSfrag replacements
� -axis
� -axis
-axis
� � � � �����
� �����
� � ���
� �����
Figure 22.4: A bug’s path.
How can we describe the curve in Figure 22.4? Tostart, lets define a couple of new functions. Given a time� , we have the point � � ��� in the plane, so we can define:
� ��� �� -coordinate of � � ��� at time ����� ��� � � -coordinate of � � ��� at time � �
In other words, the point � � ��� is described as
� � ��� � � � ��� � � � ��� � �We usually call �� � ��� and � � �
� ��� the coordinate functions of � � ��� .Also, it is common to call the pair of functions �� � ��� and ��� � � ��� theparametric equations for the curve. Any time we describe a curve usingparametric equations, we usually call it a parametrized curve.
Given parametric equations � � ��� and � � � � ��� , the domain will bethe set of � values we are allowed to plug in. Notice, we are using thesame set of � -values to plug into both of the equations. Describing thecurve in Figure 22.4 amounts to finding the parametric equations � ���and �
� ��� . In other words, we typically want to come up with “formulas”for the functions � ��� and �
� ��� . Depending on the situation, this can beeasy or very hard.
22.3 Examples of Parametrized CurvesWe have already worked with some interesting examples of parametricequations. PSfrag replacements
-axis
-axis
-axis
bug starts mov-ing at
� radsec
Figure 22.5: A circular path.
Example 22.3.1. A bug begins at the location (1,0) on theunit circle and moves counterclockwise with an angularspeed of � � � rad/sec. What are the parametric equa-tions for the motion of the bug during the first 5 seconds?Indicate, via “snapshots”, the location of the bug at 1 sec-ond time intervals.
PSfrag replacements
-axis
-axis
-axis
� � ���� � � �
� � � �� �����
� � � �� � � �
Figure 22.6: Six snapshots.
Solution. We can use Fact 14.2.2 to find the angle sweptout after � seconds:
� � � � � � � radians. The parametricequations are now easy to describe:
�� � ����� cos� � ���
� � � � ��� � sin� � ��� �
If we restrict � to the domain� � � � � , then the location of the bug at time �
is given by � � ��� � �cos
� � ��� � sin� � ��� � . We locate the bug via six one-second
snapshots:

306 CHAPTER 22. PARAMETRIC EQUATIONS
When modeling motion along a curve in the plane, we would typicallybe given the curve and try to find the parametric equations. We can turnthis around: Given a pair of functions �� � ��� and � � � � ��� , let
� � ��� � � � ��� � � � ��� � � (22.1)
which assigns to each input � a point in the � -plane. As � ranges overa given domain of allowed � values, we will obtain a collection of pointsin the plane. We refer to this as the graph of the parametric equations� � ��� � � � ��� � . Thus, we have now described a process which allows us toobtain a picture in the plane given a pair of equations in a commonsingle variable � . Again, we call curves that arise in this way parametrizedcurves. The terminology comes from the fact we are describing the curveusing an auxiliary variable � , which is called the describing “parameter”.In applications, � often represents time.
PSfrag replacements
� -axis
� -axis
-axis
� � � � � � � � ��� � � �� � � � � � � � � � ���
� � � � � ��� � � �� � � � � � ��� � �
Figure 22.7: Observing themotion of � .
Example 22.3.2. The graph of the parametric equations � ��� � � and �
� ��� � � � on the domain � � � � ispictured; it is a line segment. As we let � increase from � �to � , we can observe the motion of the corresponding pointson the curve.
22.4 Function graphsIt is important to realize that the graph of every function can be thoughtof as a parametrized curve. Here is the reason why: Given a function� � � � � , recall the graph consists of points
� � � � � � , where runs over theallowed domain values. If we define
�� � ��� � �� � � � ��� � � � ��� �
then plotting the points � � ��� � � � ��� � � � ��� � � � ��� � � ��� � gives us the graphof�. We gain one important thing with this new viewpoint: Letting �
� increase in the domain, we now have the ability to dynamically viewa point � � ��� moving along the function graph. See how this works inExample 22.4.1.
Example 22.4.1. Consider the function � � � on the domain � � � .As a parametrized curve, we would view the graph of � � � as all pointsof the form � � ��� � � � � � � � , where � � � �� . If � increases from � � to � , thecorresponding points � � ��� move along the curve as pictured:
Solution. For example, � � � � � � � � � � � � � � � � � � � � ��� , � � � � �
� � ��� � � � ,
etc.

22.4. FUNCTION GRAPHS 307
PSfrag replacements
� -axis � -axis
� -axis� -axis
-axis
� ��� �
� �� � � � �
� �� � � � � ���
� �� �
� �� � � �
� � � �
static graph � � � motion along curve
��
�� ��
Figure 22.8: Visualizing dynamic motion along a static curve.PSfrag replacements
� -axis
� -axis
-axis
Figure 22.9: Some curvesthat are not functions.
Not every parametrized curve is the graph of a func-tion. For example, consider these possible curves in theplane: The second curve from the left is the graph of afunction; the other curves violate the vertical line test.
22.4.1 A useful trickThere is an approach to understanding a parametrized curve which issometimes useful: Begin with the equation � � ��� . Solve the equation � � ��� for � in terms of the single variable ; i.e., obtain � � �
� � . Thensubstitute � � �
� � into the other equation � � � � ��� , leading to an equationinvolving only the variables and � . If we were given the allowed � values,we can use the equation � � ��� to determine the allowed values, whichwill be the domain of values for the function � � � � � � � � . This may be afunction with which we are familiar or can plot using available software.
−10 10 20
40
60
80
100
20
PSfrag replacements
� -axis
� -axis
-axis
Figure 22.10: Finding thepath equation.
Example 22.4.2. Start with the parametrized curve givenby the equations � � ��� � � ��� �
and � � � � ��� � � � , when� � � . Find a function � � � � � whose graph gives thisparametrized curve.
Solution. Following the suggestion, we begin by solving � � � � �
for � , giving � � ��� � � � . Plugging this into
the second equation gives � � � �� � � � � � � � � �� � � � � � � .Conclude that
� �� � � is on the parametrized curve if andonly if the equation ��� � � ��� � �� � � � � � � � � �� � � � � � � issatisfied. This is a quadratic function, so the graph will be an upwardopening parabola with vertex (5,0).
Since the � domain is � � � , we get a new inequality for the domain: � � �� � � � � � � . Solving this, we get � � � � � � � , so

308 CHAPTER 22. PARAMETRIC EQUATIONS� � �� � . This means the graph of the parametrized curve is the graphof the function � � � �� � � � � � � , with the domain of values
� � � � � � . Here isa plot of the graph of � � � � � ; the thick portion is the parametrized curvewe are studying.
22.5 Circular motionPSfrag replacements
� -axis
� -axis-axis � �
starting location
� � � � � � � � � � � � � � ����
location at time �
� � � � � � � r
Figure 22.11: Circular mo-tion.
We can describe the motion of an object around a circleusing parametric equations. This will involve the trigono-metric functions. The general setup to imagine is pic-tured: An object moving around a circle of radius � cen-tered at a point
� � � � � � in the � -plane. The path tracedout is the circle. However, the location of the object attime � will depend on a number of things:
� The starting location � of the object;� The angular speed � of the object;� The radius � and the center
� � � � � � .We will build up to the general solution by considering two cases, thefirst being a special case of the second.
22.5.1 Standard circular motion
PSfrag replacements
� -axis
� -axis
-axis
� � � �� � � �
� � � � � � � � � � � � � � ���
��� � � ���� � ������
startinglocation
� �
�� �
Figure 22.12: Standard cir-cular motion.
As a first case to consider, assume that the center of thecircle is
� � � � � and the starting location ��� � � � � � , as pic-tured below. If the angular speed is � , then the angle
�
swept out in time � will be� � � � ; this requires that the
time units in � agree with the time units of � ! We de-note by � � ��� � � � ��� � � � ��� � the � -coordinates of the objectat time � . At time � , we can compute the coordinates of
� � ��� � � � ��� � � � ��� � using the circular functions:
�� � ��� ��� cos�
� ���� � � � ��� ��� sin
�� ��� �
This parametrizes motion starting at � � � � � � � . Using the shifting tech-nology of Chapter 9, we are led to a general description of this type ofcircular motion, which involves a circle of radius � centered at a point� � � � � � ; we refer to this situation as standard circular motion.
Important Fact 22.5.1 (Standard circular motion). Assume an objectis moving around a circle of radius � centered at
� � � � � � with a constantangular speed of � . Assume the object begins at � � � � ��� � � � � . Thenthe location of the object at time � is given by the parametric equations: �� � ��� �� � � � cos
�� ��� and � � � � ��� � � � � � sin
�� ��� .

22.5. CIRCULAR MOTION 309
PSfrag replacements
-axis
-axis
-axis
�
�
�
�� feet�
Cosmo
motors
around
the
circle
Figure 22.13: Cosmo on arunning on a circular path.
Example 22.5.2. Cosmo the dog is tied to a 20 foot longtether, as in Figure 14.1. Assume Cosmo starts at the loca-tion “
�” in the Figure and maintains a tight tether, moving
around the circle at a constant angular speed � � � ra-dians/second. Parametrize Cosmos motion and determinewhere the dog is located after 3 seconds and after 3 min-utes.
Solution. Impose a coordinate system so that the pivotpoint of the tether is
� ��� � � � � � � � � � . Since � � � ,Cosmo is walking counterclockwise around the circle. By(4.1.6), the location of Cosmo after � seconds is � � ��� � � � ��� � � � ��� � �� ��� cos � � � � � ��� sin � � � � � . After 3 seconds, Cosmo is located at � � ���� ��� cos � � � � � ��� sin � � � � � � � � � � � � � � � � � . After 3 minutes = 180 seconds,the location of the dog will be � � � � � � � ��� cos � � � � � � � ��� sin � � � � � � � � � ��� � � � ,which is the original starting point.
22.5.2 General circular motion
PSfrag replacements
� -axis
� -axis
-axis
�rel-axis
�rel-axis
���starting position
� � � � � � �initial angle
��
Figure 22.14: Initial angleand auxiliary axis.
The circular motion of an object can begin at any location� on the circle. To handle the general case, we follow anearlier idea and introduce an auxiliaryrelative coordinatesystem: The rel � rel-coordinates are obtained by drawinglines parallel to the � -axis and passing through
� � � � � � .We are using the subscript “rel” to stand for “relative”.This new relative coordinate system has origin
� � � � � � andallows us to define the initial angle
� � , which indexes thestarting location � , as pictured below:
Assume the object starts at � and is moving at a con-stant angular speed � around the pictured circle of radius� . Then after time � has elapsed, the location of the object is indexed bysweeping out an angle � � , starting from
� � . In other words, the locationafter � units of time is going to be determined by the central standardangle
� � � � � with initial side the positive rel-axis. This means that if� � ��� � � � ��� � � � ��� � is the location of the object at time � ,
�� � ������ � � � cos� � � � � ���
� � � � ��� � � � � � sin� � � � � ��� �
Notice, the case of standard circular motion is just the scenario when���� � and these parametric equations collapse to those of Fact 22.5.1.
Important Fact 22.5.3 (General circular motion). Assume an objectis moving around a circle of radius � centered at
� � � � � � with a constantangular speed of � . Assume the object begins at the location � with initial

310 CHAPTER 22. PARAMETRIC EQUATIONS
angle� � , as in Figure 22.14. The object location at time � is given by:
�� � ��� �� � � � cos� � � � � ��� and � � � � ��� � � � � � sin
� � � � � ��� .PSfrag replacements
-axis
-axis
-axis
Ticket Booth
� � ft
� � ft
� � � � �
� �� rad
sec
� -axis (north)
� -axis (east)
�����
Figure 22.15: A rider jumpson a merry-go-round.
Example 22.5.4. A rider jumps on a merry-go-round of ra-dius 20 feet at the pictured location. The ride rotates at theconstant angular speed of � � � �
�radians/second. The
center of the platform is located 50 feet East and 50 feetNorth of the ticket booth for the ride. What are the paramet-ric equations describing the location of the rider? Where isthe rider after 18 seconds have elapsed? How far from theticket booth is the rider after 18 seconds have elapsed?
Solution. In this example, since � � , the rotation isclockwise. Since the angular speed is given in radians,
we need to convert the initial angle to radians as well: � � � � � � � �radians. Impose a coordinate system so that the center of the ride is��� � � � � � and its radius is 20 feet. By Fact 22.5.3, the parametric equa-tions for the rider are given by � � ��� � � � � ��� cos � � � � � � �
�� � and
� � � � ��� � � � � ��� sin � � � � � � ��� � . The location after 18 seconds will be
� � � ��� � � � � � � � � � �� ��� � � ��� cos
� ��� � � � � � � � ��� sin
� ��� � � � �
� � ��� � � � � � � � �
The distance from � � � � to the origin is
� �� � ��� � � � � � � � � � � �
� � � � � � feet �

22.6. EXERCISES 311
22.6 ExercisesProblem 22.1. Sketch the curve representedby the parametric equations. Choose four spe-cific � values and indicate the correspondingpoints on the curve. As � moves from left toright in the domain, indicate how the corre-sponding points on the curve are moving.
(a) � � ��� � ��� � � ��� � � � ���� � � � � .(b) � � ��� � � � ��� � � ��� � � � � � � � .(c) � � ��� � � � ��� � � ��� � � � ���� � � � � .(d) � � ��� � � � ��� � � ��� ���� � !�� � � � �� .
Problem 22.2. The population of caribou andwolves in a remote Alaskan valley is modeledby
� � ��� � ����� sin�� � � � � ! � � � �"��� � caribou �
� � ��� � ����� sin�� � � � � �
� � � � �"��� � wolves � �
where � represents years since 1970.
(a) Sketch the graphs of both populationmodels on the same axes, for times be-tween 1970 and 2000. Clearly label theaxes on your graphs.
(b) The wolves can be regarded as preda-tors and the caribou as prey. In a.,the predator graph “lags” the prey graph.Describe what this means in words.
(c) Using sketches you made above, how of-ten will the predator population exceedthe prey population?
(d) Sketch the parametric equations � � ��� �� � � ��� � � � ��� � in the � � -coordinate systemfor the time domain � � � � .
(e) Using your parametric sketch from theprevious question, plot the point � � ��� �� � � � � � � � ��� � . Describe the motion of � � ���around the plot for � � � �
and in-terpret what is happening to the preda-tor/prey population.
(f) The situation described in a.-e. is“cyclic”; i.e. the population of eachspecies cycles sinusoidally. Supposethat the population models were differ-ent functions � � � ��� and � � � ��� and that the
graph of �� � ��� � � � � � ��� � � � � ��� � is as pic-
tured below. Explain what is happening.(Note: � � ��� is the right-most endpoint ofthe curve.)
50 100 150 200 250
50
100
150
200
250
PSfrag replacements � -axis
� -axis
-axis
Problem 22.3. Return to Example 22.3.1 onPage 305. What are the coordinates of the bugin the six “snapshots” in the solution? Whenwill the bug first cross from the first to sec-ond quadrant? When will the bug first have� -coordinate � � �� � ?
Problem 22.4. Lee has been boasting all yearabout his basketball skill and Allyson can’tstand it anymore. So, she has challenged Leeto a game of one-on-one. With 2 seconds togo, Allyson is leading 14-12 and Lee fires adesperation three. Impose coordinates withLee’s feet at the origin and use units of feet oneach axis. The path of the ball is describedby the parametric equations: � � ��� � � � � �� � ,� � ��� � � ��! ��� � �#� � �� � ! .
43 feet
lee allyson
16 feet
10 feetPSfrag replacements
-axis-axis
-axis
(a) How high is the ball when Lee fires hisshot?
(b) When is the ball directly over Allyson?

312 CHAPTER 22. PARAMETRIC EQUATIONS
(c) Allyson can jump and block a ball 9.5feet above the floor. Can Allyson blockLee’s shot?
(d) Where and when is the ball 22 feet abovethe floor?
(e) Where and when does the ball reach it’shighest point above the floor?
(f) Who wins the game?
(g) Solve the equation � � � � ��� for � in termsof � , then plug this into the equation for� � � � ��� . Sketch the graph of the result-ing function � � � � ��� ; this is the path ofLee’s shot.
Problem 22.5. A six foot long rod is attachedat one end � to a point on a wheel of radius 2feet, centered at the origin. The other end � isfree to move back and forth along the � -axis.The point � is at � � � ��� at time � � � , and thewheel rotates counterclockwise at 3 rev/sec.
2 4 6
2
-2
-2
A
time t=0
A
2 4 6
time t > 0
B
8 8
BPSfrag replacements
-axis-axis
-axis
(a) As the point � makes one complete rev-olution, indicate in the picture the direc-tion and range of motion of the point � .
(b) Find the coordinates of the point � as afunction of time � .
(c) Find the coordinates of the point � as afunction of time � .
(d) What is the � -coordinate of the point �when � � � ? You should be able to findthis two ways: with your function frompart (c), and using some common sense(where is point A after one second?).
(e) Find the first two times when the � coor-dinate of the point � is 5.
Problem 22.6. A ferris wheel of radius 100feet is rotating at a constant angular speed
� counterclockwise. Using a stopwatch, therider finds it takes 3.4 seconds to go from thelowest point on the ride to a point � , which islevel with the top of a 44 ft pole. Assume thelowest point of the ride is 3 feet above groundlevel.
44 ft high pole
100 ft
Q
ground level
PSfrag replacements
-axis-axis
-axis
(a) What is the angular speed � ? How fastis the rider moving in mph?
(b) Find parametric equations for the mo-tion of a rider on the wheel, assumingthe rider begins at the lowest point onthe wheel.
(c) Due to a malfunction, the ride abruptlystops 35 seconds after it began. To thenearest foot, how high above the groundis the rider?
Problem 22.7. Cherie is running clockwisearound a circular track of radius 300 feet. Shestarts at the location pictured running withan angular speed of
�
� RPM clockwise. Juliestands at the pictured location, 100 feet fromthe center of the circle.
P=cherie
Q=julie
300 ft.
5/9 RPM
PSfrag replacements
-axis-axis
-axis
(a) When will Cherie first reach the locationon the track closest to Julie?
(b) Where is Cherie located in 40 seconds?(i.e. find her coordinates). Indicate thispoint in your picture and label it as� � ��� � .

22.6. EXERCISES 313
(c) How far has Cherie traveled (distanceshe has run) in 40 seconds?
(d) Let � � ��� be the function that calculatesthe distance between Cherie and Julie attime � seconds.
(d1) If the domain is taken to be thetime required for Cherie to com-plete one revolution, what is thedomain and range of � � ��� ?
(d2) Write down a formula to calculate� � ��� .
(e) Assume that Julie is instead located atthe position � ��� � � , where � � � � �����is a given constant. (So part (d) wasthe case when � � ����� . ) Find a func-tion � � � ��� that computes the distancebetween Julie and Cherie at time � . Yourformula will involve � and � and shouldcollapse to the formula for � � ��� in (d) ifyou set � � ����� .
Problem 22.8. In the pictures below, a bughas landed on the rim of a jelly jar and is mov-ing around the rim. The location where the
bug initially lands is described and its angu-lar speed is given. Impose a coordinate sys-tem with the origin at the center of the circleof motion. In each of the cases, find paramet-ric equations describing the location of the bugat time � seconds.
rad/secrad/sec
2 in 2 in
1.2 rad
bug lands here
bug lands here
2 in
bug lands here
2 in−40
o
ω=4π/9 rad/sec
ω=4π/9 rad/sec
ω=4π/9rad/sec
ω=4π/9 rad/sec
bug lands here
1.2 rad
2 in
bug lands here
2 in
0.5 rad
bug lands here
ω= − 4π/9ω= − 4π/9
PSfrag replacements
-axis-axis
-axis

314 CHAPTER 22. PARAMETRIC EQUATIONS

Chapter 23
Linear Motion
The simplest example of a parametrized curve arises when studying themotion of an object along a straight line in the plane. We will start bystudying this kind of motion when the starting and ending locations areknown.
23.1 Motion of a Bug
�������������������������
�������������������������
PSfrag replacements
-axis
-axis
-axis
� -axi
s� -axis
P�� � � �
Q�� � � � �
(a) A bug walking from �to � .
PSfrag replacements
-axis
-axis
-axis
R� � �
������
S� � �������
�
� � �
�-axis
� -axis
P� � � � � �
Q� � ��� � �
shadowon
�-axis
light on bug
light on bug
casts shadow
casts shadow
for�
-motion
for � -motion
shadow on � -axis
(b) How to view motion inthe coordinates.
Figure 23.1: Visualizing themodel for the bug problem.
Example 23.1.1. A bug is spotted at � � � � � � � in the � -plane. The bug walks in a straight line from � to � � � � � �at a constant speed . It takes the bug 5 seconds to reach
� . Assume the units of our coordinate system are feet.What is the speed of the bug along the line connecting �and � ? Compute the horizontal and vertical speeds of thebug and show they are both constant.
Solution. A standard technique in motion problems is toanalyze the and � -motion separately. This means welook at the projection of the bug location onto the and� -axis separately, studying how each projection moves.We can think of these projections as “shadows” cast by aflashlight onto the two axes:
For the -motion, we study the “shadow” on the -axiswhich starts at “2” and moves toward “6” on the -axis.For the � -motion, we study the “shadow” on the � -axiswhich starts at “5” and moves toward “3” along the � -axis.
In general, speed is computed by dividing distance bytime elapsed, so
� dist� � � � �� ft
sec� ��� � � � � � � � � � �� ft
sec
� � � �� feetsec
�(23.1)
This is the speed of the bug along the line connecting � and � .
315

316 CHAPTER 23. LINEAR MOTION
The hard part of this problem is to show that the speed of the hori-zontal and vertical shadows are also constant. This might seem obviouswhen you first think about it. In order to actually show it, let’s take twointermediary positions
� � � � � � � � and � � � � � � � � along the bugs path.We are going to relate the horizontal speed �
� of the bug between � and � , the vertical speed � � of the bug between � � and � � and the speed ofthe bug from
�to � . Actually, because there are positive or negative di-
rections for the and � axes, we will allow horizontal and vertical “speed”to be a � quantity, with the obvious meaning. If it takes � seconds forthe bug to travel from
�to � , then � is the elapsed time for the horizontal
motion from � to � and also the elapsed time for the vertical motion from� � to � � . The horizontal speed �
� is the directed distance � � � � � � � di-vided by the time elapsed � , whereas the vertical speed � � is the directeddistance � � � �
� � ��� � � divided by the time elapsed � .We want to show that �
� and � � are both constants! To do this, wehave these three equations:
�
� �� � � � � �
�� � � � �
� � � � � � ��
� distance� � � ��
� � � � � � ��
� � � � � � ����� � � � � �
�
� �
Now, square each side of the three equations and combine them to con-clude: � � � � �
�� �
�� �
�� �
�. We can multiply through by �
�and that gives
us the key equation:
� � ��� �
��� � (23.2)
On the other hand, the ratio of the vertical and horizontal speed gives� ��
�� � � �� �� � �� � � � �
� � � � ��� � � � �
� “slope of line connecting � and � ”
� � �
�
� ��
�� �
� �
(23.3)
Solving for � � in terms of �
� we can write
� � � � �
�
� � (23.4)
Since �
� is positive,
��
��� �
��� � �
�� �
�� �
�
� ���
� ���
�
�� �
� ��
�
��

23.2. GENERAL SETUP 317
that is,
�
� ��� � � �� � �
� � �� � �� � ��� � � feet
sec�
By (23.4), � � � � � �� � � � � � ��
ftsec. This shows the speed in both the hori-
zontal and vertical directions is constant as the bug moves from�
to � .Since
�and � were any two intermediary points between � and � , the
horizontal and vertical bug speeds are constant.
Example 23.1.2. Parametrize the motion in the previous problem.
Solution. We have shown �
� ��� � � feet/sec and � � � � � ��
feet/sec, so
� ��� � � -coordinate of the bug at time ���� �
beginning -coordinate � ��distance traveled inthe -direction in �seconds �
� � � � � ��� ��� ��� � �
� -coordinate of the bug at time ���� �
beginning � -coordinate � ��distance traveled inthe � -direction in �seconds �
� � � � ��� �
As a check, notice that � � � � � � � � � � � � � � � � � � � ��� � � � � � � � � is the starting
location and � ��� ��� � � � ��� � � � � � � � ��� � � � � � � � � � � is the ending location.
23.2 General Setup
PSfrag replacements
-axis
-axis
-axis
P� �� � � � � �
Q���� � � � � �starting
locationlocation
ending
moving from
�to
�at
a constant speed
� -axis
� -axis
Figure 23.2: Typical sce-nario.
Given two points � � � � � � � � and � � � � � � � � in the plane,we can study motion of an object along the line connecting
� and � . In so doing, you need to first specify the startinglocation and the ending location of the object; lets say westart at � and proceed to � . Fix the distance units usedin the coordinate system (feet, inches, miles, meters, etc.)and the time units used (seconds, hours, years, etc.). Ashighlighted in the solution of Example 23.1.2, the key isto analyze the -motion and � -motion separately.
We will be imposing an assumption that the speed along the line con-necting � and � in Figure 23.1(b) is a constant. There is a crucial ob-servation we need to make, a special case of which was the content ofExample 23.1.1.
Important Facts 23.2.1 (Linear motion). Assume that an object movesfrom � to � along a straight line at a constant speed , as in Figure 23.2.

318 CHAPTER 23. LINEAR MOTION
Then the speed �
� in the -direction and the speed � � in the � -direction areboth constant. We also have two useful formulas:
� � ��� �
��� �
� ��
���
slope of line of travel,when the line is non-vertical.
This fact is established using the same reasoning as in Example 23.1.1.Let’s make a few comments. To begin with, if the line of travel is eithervertical or horizontal, then either �
� � � or � � � � and Fact 23.2.1 isn’treally saying anything of interest.
The formulas in Fact 23.2.1 only work for linear motion.CAUTION
!!!
!!!
PSfrag replacements
-axis
-axis
-axisPSfrag replacements
-axis
-axis
-axis
�
��
�
no � -motion
no � -motion
� -axis � -axis
� -axis
� -axis
Figure 23.3: Horizontal or vertical motion.
For any other line of travel, we can use the reasoning used in Exam-ple 23.1.1. Pay attention that the horizontal speed �
� and the verticalspeed � � are both directed quantities; i.e. these can be positive or nega-tive. The sign of �
� will indicate the direction of motion: If �
� is positive,then the horizontal motion is to the right and if �
� is negative, then thehorizontal motion is to the left. Similarly, the sign of � � tells us if thevertical motion is upward or downward.
Returning to Figure 23.2, to describe the -motion, two pieces of in-formation are needed: the starting location (in the -direction) and theconstant speed �
� in the -direction. So,
� ��� � � -coordinate of the object at time ���� �
beginning -coordinate � ��distance traveled inthe -direction in �time units �
� � � �
� � �

23.2. GENERAL SETUP 319
If we are not given the horizontal velocity directly, rather the time �required to travel from � to � , then we could compute �
� using the factthat the object starts at �� � and travels to �� � :
�
� ��directed horizontal distance traveled ��time required to travel this distance �
��ending -coordinate ��� �
starting -coordinate ��time required to travel this distance �
� �
� � � � � � � �
� �
To describe the � -motion in Figure 23.2, we proceed similarly. We willdenote by � � the constant vertical speed of the object, then after � timeunits the object has traveled � � � units. So,
�� ��� � �
� -coordinate of object at time ���� �
beginning � -coordinate � ��distance traveled inthe � -direction in �time units �
� � � �� � � �
In summary,
Important Fact 23.2.2 (Linear motion). Suppose an object begins at apoint � � � � � � � � and moves at a constant speed along a line connecting
� to another point � � � � � � � � . Then the motion of this object will trace outa line segment which is parametrized by the equations:
� � ��� �� � � �
� ���� � �
� ��� � � � � � � � �
�������������������������������������������������
�������������������������������������������������
PSfrag replacements
-axis
-axis
-axis
� � ��� � �
��� � � � � � location E wherebug enters region
circular regionradius � ft.
�-axis
� -axis
Figure 23.4: A bug crosses acircular boundary.
Example 23.2.3. Return to the linear motion problem stud-ied in Example 23.1.1 and 23.1.2. However, now assumethat the point � � � � � � is located at the center of a circularregion of radius 1 ft. When and where does the bug enterthis circular region?
Solution. The parametric equations for the linear motionof the bug are given by:
�� � ������� � � � ��� �� � � � ��� � � � � �
�� �
The equation of the boundary of the circular region centered at � is givenby
� � � � � � �� � � � � �

320 CHAPTER 23. LINEAR MOTION
To find where and when the bug crosses into the circular region, wedetermine where and when the linear path and the circle equation havea simultaneous solution. To find such a location, we simply plug �� � ���and � � � � ��� into the circle equation:� � ��� � � � � � �
�� ��� � � � � � � � � � ��� � � � � � ��� � � ��� � � � �
�� � � � � � � � � � � � � � � ���� � � ��� � � � � ��� � � ��� � � � � �
Notice, this is an equation in the single variable � . Finding the solutionof this equation will tell us when the bug crosses into the region. Oncewe know when the bug crosses into the region, we can determine thelocation by plugging this time value into our parametric equations. Bythe quadratic formula, we find the solutions are
� � ��� � � � � � � � � � � � ��� � � � � or � � � �
We know that the bug reaches the point � in 5 seconds, so the sec-ond solution � � � � � seconds is the time when the bug crosses intothe circular region. (If the bug had continued walking in a straightline directly through � , then the time when the bug leaves the circu-lar region would correspond to the other solution � � � � � seconds.)Finally, the location � of the bug when it crosses into the region is� � � � � � � � � � � � � � � � � ���
� � � � � � � .

23.3. EXERCISES 321
23.3 ExercisesProblem 23.1. Margot is walking in a straightline from a point 30 feet due east of a statue ina park toward a point 24 feet due north of thestatue. She walks at a constant speed of 4 feetper second.
(a) Write parametric equations for Margot’sposition � seconds after she starts walk-ing.
(b) Write an expression for the distancefrom Margot’s position to the statue attime � .
(c) Find the times when Margot is 28 feetfrom the statue.
Problem 23.2. Sven starts walking due southat 5 feet per second from a point 120 feet northof an intersection. At the same time Rudyardstarts walking due east at 4 feet per secondfrom a point 150 feet west of the intersection.
(a) Write an expression for the distance be-tween Sven and Rudyard � seconds afterthey start walking.
(b) When are Sven and Rudyard closest?What is the minimum distance betweenthem?
Problem 23.3. Juliet and Mercutio are mov-ing at constant speeds in the � � -plane. Theystart moving at the same time. Juliet starts atthe point � � �"� ! � and heads in a straight linetoward the point � ����� � , reaching it in 10 sec-onds. Mercutio starts at � �&������� � and moves ina straight line. Mercutio passes through thesame point on the � axis as Juliet, but 2 sec-onds after she does.
How long does it take Mercutio to reach the� -axis?
Problem 23.4. Return to Example 23.1.1 onPage 315, but assume the bug begins at �and walks toward � . Again assume the bugwalks at a constant speed, requiring 5 secondsto traverse the distance.
(a) Describe the motion of the bug pictori-ally and via parametric equations.
(b) Find the speed and direction of thebug along the line connecting � to � ?How about the horizontal and verticalspeeds?
(c) How far is the bug from the origin after2 seconds?
Problem 23.5. The cup on the � th hole of a golfcourse is located dead center in the middle ofa circular green which is 70 feet in diameter.Your ball is located as in the picture below.Assume that you putt the ball at a constantspeed in a straight line into the cup. Assumeit takes 6 seconds to land in the cup.
PSfrag replacements
-axis-axis
-axis
Cup
9
Rough
Green
32 FeetBall
72 Feet
(a) How far does the ball travel?
(b) Find parametric equations for the mo-tion of the ball.
(c) How far is the ball from the cup after 3.5seconds?
(d) Where and when does the ball crossfrom the rough onto the green?
Problem 23.6. Return to Example 23.1.2 onPage 317. How far is the bug from the originat time � � � ? Where and when will the bug beclosest to the point � � � � � ? When is the bug 6feet from the origin?
Problem 23.7. The cup on the � ��%$
hole of agolf course is located 4 feet south and 4 feeteast of the center of a circular green which is54 feet in DIAMETER. Your ball is located asin the picture below. Assume that you mistak-enly putt the ball which travels at a constantspeed in a straight line toward the center of thegreen. It takes 7 seconds to reach the centerof the green. Use distance units of FEET andtime units of SECONDS in this problem.

322 CHAPTER 23. LINEAR MOTION
ball
cup
green
30 ft
24 ft
enters green
rough
leaves green
18
PSfrag replacements
-axis-axis
-axis
(a) Find parametric equations for the mo-tion of the ball.
(b) How far is the ball from the cup after 5seconds?
(c) Where and when does the ball cross intothe green and out of the green?
(d) Find when and where the ball is closestto the cup. (Hint: Construct a line thruthe cup perpendicular to the path of theball, then find where these two lines in-tersect.)
(e) Find a function of � that computes thedistance from the ball to the cup at anytime � .
(f) When and where is the ball 8 feet fromthe cup?
Problem 23.8. Recall the Billard problem in15.1.1 on Page 199. Assume you strike theball and it travels a constant speed of 20in/sec along the dotted path.
(a) Find parametric equations for the mo-tion of the ball. (Hint: Both the coor-dinate functions will be multipart func-tions.)
(b) Where is the ball located after 2 sec-onds?
(c) Where is the ball located after 5 sec-onds?
(d) When does the ball strike the cushion?
(e) When does the ball land in the pocket?
(f) When is the ball 2 feet from the pocket?
4 ft
5 ft
12 ft
6 ft
this pocket forthe big money
PSfrag replacements
-axis-axis
-axis
Problem 23.9. Two practicing hockey playerslocated at positions � and � in the picture. Theplayer at position � strikes a puck, which wewill assume moves at a constant speed alongthe line connecting � and � ; assume it takes 2seconds for the puck to go from � to � . At thesame instant, the player at position � strikesa puck, which we will assume moves at a con-stant speed along the line connecting � and
�;
also assume it takes 2 seconds for the puck togo from � to
�.
AB
D C
40 ft
50 ft
30 ft
30 ft
50 ft
30 ft
20 ft 30 ft
rink
centerline
centerline
PSfrag replacements
-axis-axis
-axis
(a) Describe parametric equations for themotion of each puck. How fast is eachpuck moving?
(b) Describe the location of each puck after1.4 seconds.
(c) Compute the distance between the twopucks after 1.4 seconds.

23.3. EXERCISES 323
(d) Write down a function � � � � ��� whichcomputes the distance between the twopucks at time �
(e) When is the distance between the twopucks 40 feet?
(f) When is the distance between the twopucks 5 feet?
(g) Where do the paths of the two puckscross?
Problem 23.10. After a vigorous soccermatch, Tina and Michael decide to have a glassof their favorite refreshment. They each run ina straight line along the indicated paths at a
speed of 10 ft/sec. Parametrize the motion ofTim and Michael individually. Find when andwhere Tim and Michael are closest to one an-other; also compute this minimum distance.
PSfrag replacements
-axis-axis
-axis
Michael
Tina
� � � ��� ���� � � ��� � � ���soy milk
�� ��� � � �
beet juice

324 CHAPTER 23. LINEAR MOTION

Appendix
325

326 CHAPTER 23. LINEAR MOTION

Appendix A
Useful Formulas
Abbreviationsinch � in
feet � ft
yard � yd
mile � mi
millimeter � mm
centimeter � cm
meter � m
kilometer � km
second � sec � s
minute � min
hour � hr
year � yr
ounce � oz
pound � lb
gram � g
kilogram � kg
quart � qt
gallon � gal
milliliter � ml
liter � L
Joule � J
calorie � cal
atmosphere � atm
Coulomb � C
radian � rad
degree � deg� �
miles per hour � mi/hr� mph
feet per second � ft/sec� ft/s
meters per second � m/sec� m/s
revolutionsper minute
� rev/min
� RPM
327

328 APPENDIX A. USEFUL FORMULAS
Conversion FactorsLength
in ��� � � � cm
ft � � ���� � � m
mi � � � � � � � km
Volume
gal � � � � � � L
qt � � � � � � � L
Energy
J � kg m�/s
�
cal ��� ��
J
Mass
oz � � � �� � � � g
lb ��� �� � � � � kg
Formulas from Plane and Solid Geometry
Rectangle� Perimeter ��� � � � �
� Area � � �
PSfrag replacements
-axis
-axis
-axis
�
�
Triangle� Perimeter � �
� � � �
� Area � �� ��PSfrag replacements
-axis
-axis
-axis �
�
��
Circle� Perimeter �������� Area ����� �
PSfrag replacements
-axis
-axis
-axis�
Rectanglular prism� Surface Area � � � � � � �
�� �
� �� Volume � �
��
PSfrag replacements
-axis
-axis
-axis
� �
�
Right circular cylinder� Surface Area � ��� � � � ����� �
� Volume ��� � � �PSfrag replacements
-axis
-axis
-axis� �

329
Sphere� Surface Area �
���� �
� Volume � � � � ���PSfrag replacements
-axis
-axis
-axis
�
Right circular cone� Surface Area ����� � � � �� Volume � �� ��� � �
PSfrag replacements
-axis
-axis
-axis�
ConstantsAvogadro’s number � N � � ��� � � � � �speed of light � c � � � � � �
m � s �density of water � g � cm �mass of earth � �
� � � � � � � kg
earth’s equatorial radius � � � � � mi � � �� � � � � m
acceleration of gravity at earth’s surface � � ft/sec� � � � � m/s
�
Algebra�
��� � � �
� � ������ � � � �
� ��
� � �
�
� �
�� � � �
�� �
�
��� � �
� � � �
��� � � �
� � ������ � � � � � �� � �
� ��� � � � � � �
����� � � � � � �
� � � � � � ������ � � ��� � � � � �
� � ���� � �
� Quadratic Formula: If� � � � � � � � , then � � � �
����� �
�� �

330 APPENDIX A. USEFUL FORMULAS
� Completing the Square:� � � � � � � �
� � �
� � ��� �
�� � � �
Trigonometry� sin
� � � � sin � cos
� � � � cos � sin
� �� � � � cos
� cos� �� � � � sin
� sin� �� � � � cos
� cos� �� � � � � sin
� sin� � � � � sin
� cos� � � � � � cos
� sin� � � � � � sin
� cos� � � � � � cos
� sin� ��� � � sin cos � � cos sin �
� cos� � � � � cos cos � � sin sin �
� sin� � cos
� � � sin � ��� sin cos � cos � � cos
� � sin�

Appendix B
Answers
Answer 1.1 (b) 150 ft/sec. (c) Gina. (d) 6300 hours.
Answer 1.2 (a) About � � � minutes. (b) � lb/in�/min
Answer 1.3 (a) � � � meters long; about 0.84 miles. (b)
�� hours to recite the number.
Answer 1.4 (a) � �
� dollars/year. (b) Tuition would be$ � � � � � � in
� � � .Answer 1.5 � � � � � � � km.
Answer 1.6 � �� � � � � � cm for lead; � � � � � � � � cm for alu-
minum.
Answer 1.7 (a) 5.5 min/mi = 5:30 pace. (b) � � �� ft/sec.(c) Adrienne.
Answer 1.8 (a) (John’s Salary) = $56000 and (taxes) = $0.(b) (John’s Salary)
�$56000 and (taxes) = 0.15 � (John’s
Salary). (c) (John’s Salary) � $ � � � � and (John’s taxes)� � � � � � (John’s Salary). (d) 1500
�(number of 120 stu-
dents each year)�
1800. (e) (cost red Porsche) � � � (costF-150 pickup). (f) 2 hours
�(weekly study time per credit
hour)�
3 hours (g) 2 � (number of happy math students)� 5 � (number of happy chemistry students). (happy mathstudents) + (happy chemistry students) � �� � (number ofcheerful biology students). (h) (Cady’s high score) - (Cady’slow score) = 10%. (Cady’s final exam score) = 97%. (i)� � � � � � � � � �� (total votes cast)
�(Tush votes)
� �� � � � � � � � ��(total votes cast).
Answer 1.9 Go for the 15 inch pie.
Answer 1.10 (a) m � � �� � kg �m ��� � � � �
kg �m ��� � ��
� � � � kg � (b) � � � � �
� � � � � msec �
Answer 1.11 � �� � pizzas sold in � hours. Profit reaches
$ � � � � at about��� � �
pm.
Answer 1.12
Answer 1.13 About � � � � times around the equator.
Answer 1.14 (a) Radii are about � � � � � � � � , � � � � � , � � � � �and� � � � � cm at the indicated times. (b) No.
Answer 1.15 (a) � � � million gallons per week; about � � � �million gallons per year. (b) � � � yds � � yds � � � yds.
Answer 1.16 (a)� �
��� � � � � � � � � � . (b) Reduced com-
petition for resources (eg. water, nutrients, etc.).
Answer 1.17 Formula simplifies to � � � � �� � � � . Rates are
about 0.67 � , 0.6 � , � � � � and � � � � at the indicated times.Rates decrease over time, but will never be less than � � � .Answer 1.18 (a) Initial time = 7am, Initial temperature =44 � F, Final time = 10am, Final temperature = 50 � F, rate ofchange = 2 � F/hr. (b) 58 � F. (c) Initial time = 4.5pm, Initialtemperature = 54 � F, Final time = 6.25pm, Final tempera-ture = 26 � F, rate of change = -16 � F/hr.
Answer 1.19 (a) � �
. (b)� �
� � �. (c) �
�� � � � � . (d)
� � . (e)� � �� � � � � � .
Answer 1.20 (a) � � � � � � � � � � � � � � � � � � (b) 1.99609. (c) � �� .
Answer 2.1 (a)� � � �
,����� � � � � . (b)
� � � ,���
� � ,� � � �
�. (c)
� � � � � , � � � , � � � � � . (d)� � �� � ��� � � ,
��� � , � � � � � .
Answer 2.2 (a-c) True. (d)��� � �
� � � � � �
�. (e)�
�� �
� � � � � � � �. (f)
��� � means the points line
on the same vertical line;� � � � means the points line on
the same horizontal line.
Answer 2.3 Just after 12:29 PM that afternoon.
Answer 2.4 (a) Erik= 6.818 mph, Ferry = 17.6 ft/sec. (b)Impose coordinates with Kingston the origin and units ofmiles on each axis; then Edmonds is located at
� � � ��� andErik’s sailboat is at
� � � � � . The table rows have these en-tries:� ��� ��� , � � � � � ��� , � � � � � ��� , � � � � ��� .� � � � � , � � � � � � � � � � , � � � � � � � � � , � � � � � � � �
�� ���� � � � , ��� � �
� ,� � � � � , � � � � � � � � � � � � � � �
�� � � (c) Use
coordinates as in (b), then when the ferry reaches� � � ��� ,
Erik is at� � � � � � � � � . (d) CG vessel does not catch the ferry
before Edmonds.
Answer 2.5 (a)� � � � � � �� � � (b) 227 minutes, 168.4
miles (c) � � � � � � seconds.
331

332 APPENDIX B. ANSWERS
Answer 2.6 (a) Allyson’s coordinate position:� � ft � � � ft � .
Adrienne’s coordinate position:�
� � � ft � � ft � . (b) After 2seconds there will still be slack in the bungee cord. (c)�� � � � � . Use this time to find where Allyson and Adrienneare located. (d)
� � seconds.
Answer 2.7 Impose a coordinate system with origin at� and the shore the horizontal � axis; let � be the lo-cation on the shore where Brooke beaches. Equation�� � � � � � � �� � � � � � gives time to reach Kono’s.
� � ��� � �hr,� � � � � � � �
hr. Neither time will be the minimum time.
Answer 2.8 (a) 12 m/s and 3 m/s. (b) Nikki escapes.Laura is eventually stung after 2.921 seconds when she is35.055 meters to the right of the hive. (c) Nikki must ex-ceed 3 m/sec, which is about 6.7 mph; feasible. However,Laura must exceed 12 m/sec, which is about 27 mph,which would be world record pace of about 8.3 secondsfor a 100 meter dash!
Answer 2.9 (a)� �
, � � � � � , � � � . (d)� � �
��. (e)
� �� � ,� � �
� � � � � � � �� � � � � , � � �
� � � �� � � � � � ��� � � .
Answer 2.10 If the origin is the gliderport: (a)� � � ��� � � ��� ,(b)
� ��� � � � � , (c)� � � ��� � � ��� , (d)
� ��� ��� . If the origin isthe hang glider: (a)
� ��� ��� , (b)� � ��� � � � � , (c)
�� � ��� � � � ��� ,(d)
��� � ��� �
�� ��� . If the origin is the boat: (a)
�� � � ��� � � ��� ,(b)� � ��� � � , (c)
� ��� ��� , (d)�
� � � ��� � ��� .Answer 2.11 (b) ��� �
� . (c) � � � � � sec. (d)�� � � � � � � (e) �
�seconds. (f)
� � seconds. (g) � � seconds to � � � � � seconds.
Answer 2.12 (b) � �
; � �� . (c)
� � � � � (d) spider=� �� � � � ,
ant=� � �� � � � � . (e) 1.5 feet. (f) Spider reaches
� � � � � when � � ; ant reaches� � � � � when
� � . (g) spider speed is� ft/sec; ant speed is� �
ft/sec.
Answer 2.13 � � � � �mph.
Answer 2.14 141.46 miles. They are 300 miles apart attime 0.826 hr = 49.6 minutes.
Answer 2.15 (a) Final answer is correct, but secondequality is wrong. (b) Final answer should be � � � ; keyfact is that
�� � � �
� ������ � � �
�, etc. (c) Answer and
steps correct.
Answer 2.16 (a) �� �
� � � � � (b) ��
� (c) ��
� �Answer 2.17 (a)
� � � . (b)� �
� . (c)� �
�
�� � � � � � . (d)� �
�� �
� �� �
. (e) �� �
.
Answer 2.18 (a) � � � � (b)� �� � (c)
�� � � � (d)� � � � � �
Answer 3.1 (a)�� � � � � � � � � � � � � �
(b)�� � � � � �� � � � ���� � � �� � (c) Draw a vertical and horizontal line
through�� � � � . On the vertical line, a circle of radius 2
will have a center at either�� � � � or
�� � � � � . Likewise, the
horizontal line will have circles at either�
� � � � � or� � � � � .
Eqn� � � � � � �
� �� � � � � � � � � � � � �
1.� � � � � �
� � � � � � � � � � �� � �
2.�� � � � �
� � � ���� � � � � � � �
3.�
� � � � ����� � �
��� � � � �
� � �4.
�� � � � �
�� � � �
��� � � � �
� � �(d)�� � � � ,
�� � � � � , � � � � � � ��� , � ��� � � �
� � �Answer 3.2 Wet in 29.78 minutes; 236.37 ft. from theintersection.
Answer 3.3 (b) (i)� � � � � gives a circle of radius 3 cen-
tered at the origin; (ii)� � � �
,� �
� � � � ; (iii)� � � �
� � � ;(iv)
� � � � � � � � � � � (c)� � � � � � � � � � and
�� � ��� � � � � � � .
Answer 3.4 (a) Imposing with � -axis along ground and � -axis along tower, wheel modeled by �
��� � � � � �
� � � ��.
(b) 46.43 ft. to right of tower. (c)�
�� � � � � and
��� � � � � � � .
Answer 3.5 Lee has 2.265 in�
more pie.
Answer 3.6 (a) Impose a coordinate system so that thetractor is at the origin at
� � seconds. With this coor-dinate system, the south edge of the sidewalk is modeledby � � � � � � ; the north edge is modeled by, � � � � � � . (b) � � � minutes. (c)
� � minutes. (d)� � minutes.
Answer 3.7 (a)] The equation for eastward travel fromKingston is � � �
. Southward travel along ��
� � . (b)Boundary:
����
� � � � � � � � ���� � �
; Interior:����
� � � � � � �
� �����
�; Exterior:
�� �
� � � � � � � � �����
�. (c) 3.82 minutes.
(d) Plug ��
� � into circle equation to find exit point. Usethis to find when the ferry exits the radar zone. Be carefulto reference all times relative to when the ferry departedKingston. (e) 20.32 minutes.
Answer 3.8 (a) If ��
� � , then intersection points are�� � � � �
�� � . If � � �
, then intersection points are� � ��� � � � . (d) Ant exits at time
� �� � � � � . Spi-
der enters at time � � �
�� . (e) Ant reaches � at time �
� � � and spider at time � . (f)
� � � � �� � � � �
� � .(g) distance(
� � � � � � � � � ) =��
�, distance(
� � � � � � � � � ) =� ,
distance(
� � � � � � � � � ) =� �
.
Answer 3.9 (a) 6.92 seconds. (b) 7.67 seconds. (c) 38.16seconds. (d) 7332 ft
�� area � � � � � ft
�.
Answer 3.10 (a) ��� � � . (b) no solutions. (c)
��� � �
� �and
��� � � � . (d)
�� � � �
� � � � � .Answer 4.1 (a) � � �
�� � � � � � � � (b) � � � � � � � � � �
�(c) � � �
�� �
�(d) � � � � (e) � � �
� , � � ���� � � � � � (f)
� � � � � � � � (g) � � ��� ��� �� (h) � � � � �
Answer 4.2 If the basket is at the origin of our coordinatesystem and we use feet units on each axes, then the linesanchor at the points
� � � ��� � ��� . Each line is 120.185 ft.
long.
Answer 4.3 (a)� �� � � � � � � � � � � � (b) � � �
� � . (c) � � � � � � .Answer 4.4 (a) area
� � �� � (b) area�
�� �� � (c) � �
� ��Answer 4.5 In some cases, answers in this problem areunique. In other cases, the answers are not unique. Hereis a possible solution set:

333
Eqn Slope�
-int Pt on line Pt on line
� � � � � � � � ��� � � � � ���� ���
� � �� ��� � �
�
��� �� �
�
�� ��� � ��� � � � � � �
� � � � � � � � � � ��� � � � ���� ���
� ���� � � �� � ��� � � � � � � � ���
� � � � � � � � � � � � � � � � � � � � ��� ��� � � � � � ���� � � � � ��� � ��� � � � ���� � �
Undef None��� �� � � ����� � �
� � � � � � � � � � � ��� � � � ��� � � � ���Answer 4.6 (a) � � � � � � � � � �
�
� ��� � � � � � � � (b) � �� � � � � � � � �
�
� ��� �� � � � � (d) Tabularize your answer:
PortYear Seattle Townsend
1983 $ ��� � � � $ � �
� � � � �1998 $
� � � � � � � $� � � � � � �
(e) �� � � � � , $
�� � � � � � (f) �
� � � � � � , Sea�
$ �� � � � � (g)
� � � � � � �,
Sea�
$ � � � � � � � (h) ��
�� � � � , Sea
�$ � � � � �
(i) No.
Answer 4.7
�� �
� � � � � � � � � � �� �
� � � ������
��
�� �Answer 4.8 Line of travel is � � � � � � � � � � � � � � . (a)�
� � ��� � � � � � � � � � � (b) � � � �seconds (c) �� � �
seconds (d)�� � � � � � � � � � � � � at about
� � � � sec.
Answer 4.9 (a)� �
� �� � � � � � � ��� � � � . (b) � � �� gallons. (c)400 miles.
Answer 4.10 (a) Allyson at� ��� � ��� ; Adrienne at
�� � � � ��� .Bungee is 83.1401 ft. long. (b) Occurs at time
�� � � � �seconds and Allyson is at
� ��� � � � � � � . Allyson’s final loca-tion is 77.546 ft. from her starting point.
Answer 4.11 (a) None of the points are on� � . (b) Sum=
�� .
(c) The analogous sum of squares based on the line � � �is� � � ��� � � � � �
� � � � � �� � ���
� � ; a worse fit to the threepoints, which is visually apparent as well.
Answer 4.12 The lines of tangency have equations � ���� � � � � �
� � . The visible portion of the � -axis is �� � � �� �
� � � � � �� .
Answer 4.13� � �
�� �
� � � � and� � �
��� � � . In Oslo, the
temperature is �� � � � �
.
Answer 4.14 At the closest point, she will be26.22471828 miles from Paris.
Answer 4.15 Impose coordinates with Angela’s initial lo-cation as the origin. Angela is closest to Mary at��
� � � � � � � � � � � � � � ; this takes approximately ��� �seconds.
Answer 4.16 (a) $24,609; 1990.25. (b) 66.3%; 2077. No,
� never exceeds 68.73%, but gets closer and closer as timegoes by. (c) The slopes of the lines involved.
Answer 4.17 72.62 seconds after initial spotting.
Answer 4.18 At times � � � � � and
� �� � � . � � � � � � � ��� � � � � � � , � � � � � � � � �
� � � � � � � � � . � � �� � � � � �� � � �
� �� � ,� � � � � � �� � � �
� � � � � .Answer 4.19 (a) Impose coordinates with sprinkler ini-tial location as the origin
� ��� ��� . Line equation becomes� � � �� � � � � � . (b) Sprinkler is located at� ��� � � � � at time � � � minutes. Circular boundary of watered zone hits
southern edge of sidewalk at the points�
� � � � � � � � � � � � � � � �and�� ��� � � � � � �
� � � � � � � . (c) � � � �� � � � � � � � � �.
Answer 4.20 (a)�
� � � � � � � � � � =�
� � �� �� � � � . (b) �
� � � � � � � � � � � � � � � � ; or the exact answer would be�� �
�� � � � . (c)
� � � � . (d) No real number solutions.
Answer 4.21 (a) �� ��� � � � � (b) �
�� � � � � � � � � � � � � � � � �
(c) No real number solutions. (d)�
� � � ��� � � � � � � � �
� � � � � � � � (e) �� � � � � � � � � � �� �
�� � � � � � � � � .
Answer 4.22 (a) There are four answers: �� � � � �
� �and �
� � � � �� �
(b) � � � � �� .
Answer 5.1 (a) Yes ,� �� ��� � � . (b) Yes,
� �� �� �� � �
�� .
(c) No, fails vertical line test.(d) Yes,
� �� �� horizontal line.
(e) Yes,� �� �� �� , ���
� � .(f) Yes,
� �� �� �� � , ���
� � .(g) No, � � �
�� � , ���� � , fails vertical line test.
(h) Yes,� �� �� ���� � .
Answer 5.2 (a) ������� . (b)
�. (c)
���� . (d) �
���� .
(e) � � � � � � � � (f) �� � � � � � � � � � � .Answer 5.3 � � � � �
�� � �
� � , � � � � � �� � � � , � � � �
�� �
� � ,� � � � � , minimum � � � � = 20, maximum � � � � = 40.
Answer 5.4 (a) � � � � �� �� � � �
� �� � , � � � � � � . (b)
� � � �� �
� �� � � ��
� � , ��
� ���� �
� � . (c) � � � � �� �� � � �� � � � , � � � or ��
� � . (d) � � � � �� � � � � ��
� � � � ,� � � �
�or �
�� �
�.
Answer 5.5 For example, in (a), suppose Dave has con-stant speed � ft/min. Then the function �
� � � � � � will compute the distance Dave travels in
minutes. The
graph would be a line with � -intercept 0 and slope � ; thedomain would be � � � � � � �
�; etc.
Answer 5.6

334 APPENDIX B. ANSWERS
Answer 5.7 Several possible answers for each one.
Answer 5.8 (a) � -intercepts� �� � � �
� � � � . � -intercept =��. (b)
� �� � � �� � � � � � and
� �� � � � � � � � � � . (c) None. (d)
Yes, No, No, Yes. (e)� � � �
� � � ��
� � � � � � �� � � � � � � � � .
Answer 5.9 (a) � � � � � � . 20,000 molecules. 25 seconds.(b) � � � � � � �� � � . (c) � � � � � �
g. (d) � � � � � � �g.
Answer 5.10 (b)� �� �
� � � � � � � �� � � � � � � � � � ��� � .(c) The table of values
�� �� �� � � will be:
� � � � � � � � � ,� � � � � �
� � � � � , �� � �
� �
� � � � , �� � � � � � � � � � , � � � � � �
� � � � ,� � � � � � � � � � , � ��� � � � � � � � � , � ��� � � � � � � � � , � � � � � � � � ��� . Min-imal cost occurs for some
� � � � � ��� ; the exact answeris �
� � �� , but we cannot solve this in our class since itrequires the tools of Calculus.
Answer 5.11 (a) ��� , �
� � , � � , �� ��� � � � . (b) � , 20, � � � � ��,� � �
� � � ,� �����
� � � ��� � � � . (c) Always � � � .Answer 5.12 (a) Relates items purchased and their cost;the input (independent variable) would be the item andthe output (dependent variable) is the cost. This sets up afunction relationship. (b) Let � be a word in the index and� represents a page number. The index does NOT set up afunction relationship between � and � , since a single itemmay be referenced to several different pages and a singlepage may contain several different items being referenced.(d) Independent variable is the dial setting and the depen-dent variable is the radio station you hear. This sets up afunction relationship.
Answer 5.13 Use the vertical line test. For example, (a)is not a function, by the vertical line test; you can split itinto two function graphs by slicing the ellipse symmetri-cally into upper and lower halves. On the other hand, (o)is a function, by the vertical line test; etc.
Answer 5.14 (a) �� . (b) �
� � � �. (c) �
� � � . (d)� � � � � ��� � � ��Answer 6.1 (a) 0, 2, 3. (b) �
� � � , � � � , no solution. (c)Intersect at
� � � � � and�
��� � � � � . Area is � �� .
Answer 6.2 (a)�� � � � � �
���� � � � � � � if �
���
� � ��� � if � � ��
-4 -2 2 4x
0.5
1
1.5
2
2.5
3
y
PSfrag replacements
-axis-axis-axis
Answer 6.3 (a) �� � and �
��� �� (b) �
� � � � (c) theequation has no solutions.
Answer 6.4 (a) The rule is
� � � �� if � � �
�� �� � � � � if � �
��� � �
and the range is � � � � � � .(b) The rule for the area function
� �� � is
� �� �� � �
�if � � �
�� �
� �� � � � � � � � � � if � ���� � �
(c) ���� � � � � inches.
Answer 6.5 (a)
� � � ��� � if� � �� � � � � �� � � � if � �� � ���
(b)� � � � � � � � if
� �� � � � � �
if � � � �
(c)
� �� � ����
� � � if� � �� � � � � � � � � �� � � � if � ��
� ��� � � � �
� � � � � � � if � � � � � � � � �� � � � � � �
�� � � � �
if � � � � � � � � ��� � �
if ��� � � �Answer 6.6
� � � �� � � ���
��
if � � �� � � � � � � � � ��
� � � if � � � � �� � � � � � � � � �� �
� � ��� ��
if � ����� � � � �
� � � � � if � � � � � �
Here is the graph of� �� �
5 10 15 20t sec
20
40
60
80
100
120
140
ft
PSfrag replacements
-axis-axis-axis
Answer 6.7 (a)�� �� � � �
�� �� � � � � � � . �
� � � � .(b)
� � �� �� if � � �
� � �� � �� � � ��
� � � � � if � � � � � � �� if� � � �
�� � �
(c) grade= ��� � � �. (d) �
� �
� � � � �.
Answer 6.8 (a) � � ��� � � � � � � � � � � � � � � has � -
intercepts �� � � � . � � � � � � � � � � �
� � � �� � � � �
� �� � has � -intercepts � � �
� . � � ������ � �
��� �
� � � � � � � � � � ���
� � � � �� � � � � � � � � � ��
�� � has � -intercepts
� �� � � � � � � ���
(b) � � � �� � � � � � has degree 5; � � � �
� � � � � � � hasdegree 3; � ��� � � � � � � � � has degree 10.
(c1) The graph of � � ��
� � is pictured below:

335
-2 -1.5 -1 -0.5 0.5 1 1.5 2x
-6
-4
-2
2
4
6y
PSfrag replacements
-axis-axis-axis
(c2) The graph of� �
� � ��
� ��� � is obtained by reflecting
the graph of � � � � � � across the � -axis.���
� �
�� ���
� ��� � if �
�� �
��
� � if � ���� �
� ��� � if � � �
��
��
� � if ���
and the graph of
���
� �
�is given below:
-2 -1.5 -1 -0.5 0.5 1 1.5 2x
-6
-4
-2
2
4
6y
PSfrag replacements
-axis-axis-axis
(c3) � � �� � . (c4) Roots of � � � � � are �� � �� � . These
give � -coordinates of ”hilltop” and ”valley” in the plot of� � ��
� � in (c1); i.e. roots of the auxillary quadraticdetected the extrema of the graph of � � �
�� � .
Answer 6.9 (a) � � � �� �� � � � �
�� �� � � �
�� � , degree 3. (b)� �
� ��� � � � � � � �
���, degree 2. To get 600 sq. in.
dimensions are: � � � � � � � � � � � � � �� � � � � .
Answer 6.10 (a) 2 hours. (b) Impose coordinates with �axis the bottom of the ditch and the � axis the picturedcenterline.
� ����
� � if ��
� � �� � � � � � � �
���� � ��� � if � � � � � � � � �
� � � � � � � �����
� ��� � if � � � � � � �� �
� if �� � � �
� � �� � � � � � � �
�� �
� ��� � if� � � �
� � �� � � � � � � �
�� � � ��� � if � � � � � � �� � if � � � �
(c)� � � � �
� �
� � feet. (d) 42 ft. wide: 0.3008 minutes. 50 ft.wide: 8.038 minutes. 73 ft. wide: 116.205 minutes.
Answer 6.11 (a) � � � � � . (b) Increasing: � � � � � ��
and� ��� � . Decreasing: �
� ��� �
and � � � � � .(c)
� � ���
�� � �
�if � � � � � � �� � � � �
����
� � � if � � � � � �� � � � ��� �
� � � if � � �� ��
�� � �
�if � � � � �
(d)� � � � � . (e)
� � � � � .
Answer 6.12 (a) 0. (b)� � � �� ,
� ���� , �
�� � .
Answer 7.1 (a) Rocket hits left portion of roof at posi-tion
�� ��� � � � � � � � � � � � . Maximum height of the rocket oc-
curs at position�
� ��� � ��� . (b) Rocket misses house,lands at
�� � ��� ��� and has maximum height at the posi-
tion� ��� � � � ��� . (c) Rocket hits right portion of the roof at
the position�� � � � � � � � � � � � . Maximum height of the rocket
occurs at position�
� � � � � � � � . (d) Rocket misses house,lands at
�� ��� ��� and has maximum height at the position�
� � � � � � � .Answer 7.2 (a)
� �� � � � � � �
, Vertex: (4, 9), Axis: � = 4. (b)� � � � � � � � � � � � � � , Vertex: (5/2, -383/4), Axis: � = 5/2.(c)�� � � � � � � � � � � � � � � � , Vertex: (3/14, 2539/196), Axis:
� = 3/14. (d)� �� � ��� � � � , Vertex: (0, 0), Axis: � = 0. (e)�
� � � � ��� � � � ��� � � � , Vertex: (0, 0), Axis: � = 0.
Answer 7.3 (a) Multipart function: �� � � � �� � � � � � � � �for � � � � � � � � � � , � �� � � � for
� � � � � � � � � ; $23,125. (b)Sell at time
� � days; $2500. (c) On day �
� � it isworthless.
Answer 7.4 The parabola has � intercepts at � � � � and �intercept at -3. The vertex of the parabola is
�� � � � � .�
��
��� � � � � �� �
��
��� � � if �
�� �� �
������ � if � � � � � �
��
��� � � if � � �
Answer 7.5 (a) 100 ft. (b) 156.25 ft. (c)� � � � � �
� � . (d)When � = 54.81 ft. or � = 570.19 ft.; i.e. at
� � � �
� � � � � � � �and� �� � � � � � � � � � � � � .
Answer 7.6 (a) No, since� �� ��� �� �
. (b) The points�� � � �
� � � and�
��� ��� � � �
� � � . (c) Only the point� � � � �
� � � .(d) The points
��� � � � � � � � � � � � � � � and
� � � � � � � � � � � � � � .Answer 7.7 White.
Answer 7.8 (a) Dave’s maximum velocity is� � ft/sec at
time � � sec; pace is 4.4 min/mile. (b) 82.4813 sec-
onds.
Answer 7.9 She should have 225 trees in the orchard.
Answer 7.10 She should charge $ � � � � to make the mostmoney.
Answer 7.11 The radius of the circular part should be1.787739 feet and the long side of the rectangular partshould be 7.404087 feet.
Answer 7.12 The enclosure should be 50 meters by 75meters.
Answer 7.13 Cut so the pieces have lengths 26.394 in.and 33.606 in.; bend the 26.394 inch piece into a circle.
Answer 7.14 (a) � � ��� ����� � . (b) � � � � � � � � � � � � �
� � � � . (c) � � � � � � � � ��� � � � . (d) No solution.

336 APPENDIX B. ANSWERS
Answer 7.15 (a) The quadratic portion is � � � � � � � �
� � � .Answer 7.16 In the first case,
� � � or� �
��. In the
second case,� � �
�� � � .
Answer 7.17 (d) There are two possible values for � : If� � �
�� �
� � , then the unique solution of the equationwill be �
�� � �
�� � . If � � �
�� �
� � , then the uniquesolution of the equation will be �
�� � � �
� � .Answer 7.18 (a)
� �� � � � � � � � � � � . (b) ��
� � �� � �
�.
Answer 7.19 (a) The maximum value of� �� � is because
the graph of the function is a parabola, opening down-ward, with vertex at
� ��� � . (b) Two distinct solutions pre-cisely when
� �� � � � � � . One solution precisely when� �
� � � � � � . No solutions precisely when� �
� � � � � � .(c) �
� � � � �� �
or �� � � � �
� �. (d) �
� �� .
Answer 8.1 (a) � � � � � �� � � in.
�. (b)
� � � � �� in.
�. (c)
� � � � � sec. (d) �� � � � � �
�in�. (e) �� � � in
�. (f)
� � � � � � in�.
Answer 8.2 (a)� � � � � � � � �� � if
��
� � if ��
� � � � � � � � �
� � if �
� �� � if � �
� (b)
� �� � � � � � �
� � if � �
� � if � �
� � � � � � � � � � if
� ��
� � if � � (c)
� �� � � � � �� ���
�
� � if �
� �� � if � �
� � ��� � if � � � �
� � if ��
-3 -2 -1 1 2 3x
-1
-0.5
0.5
1
1.5
2
2.5
3y
PSfrag replacements
-axis-axis-axis
Answer 8.3 (a) � � � � � � � � � , if� �� ���� � � � � � � � � � � � (b)� � � � � � � � � , if
� �� ����� , � � � � � � � �
�� (c) � � � � � � � � � , if� �
� �� ���
� � � � � � � � � � � � � � � � � � � � � ��� (d) � � � � � � � � � ,if� �� �� �
� � � � , � � � � � � � � � � (e) � � � � � � � � � , if� �� �� �� ,� � � � � �
� � � � (f) � � � � � � � � � , if� �� �� �
�� � �
�,� � � � � � � � � �
Answer 8.5 (c) ��
� � and �� �
Answer 8.6 (a)� � � � � �
� � ;
� � � � � � � � � � ��
� �� � �� � � � �
� � � � � � � computes mph when you input seconds � . (b)� � � � � � � � ;
� � � �� � � � � � � � � � �� � � � � � � � �
� � � �� � � computes mph when you input hours�
. (c)� � � � � � �� � � ;
� � � � � � � � � � � � �� � � � � �� � � � � � � computes ft/sec when you input minutes � .
Answer 8.7 (a)� �� �� � � �
� � � . (b) The formula is � � � � � �� � � � � � � � � � � � � � ����� � � � � (e) Between six and seven years; see
this by checking values of � � � � � for �� � � � .
Answer 8.8 (a)� � � � � � � � � � � � � � , � � � � � � � � � � , � � � � � � � �
��� � . (b)
� � � � � � � � �� � ,� � � �� � �
�� , � � � � � � � � �� � . (c)� � � � � � � � � , � � � � � � � � �
� � �� � , � � � � � � � � � . (d)
� � � � � � � �� � � � � � � � , � � � � � � � � � � � ��� � � � , � � � � � � � � � �
�� � .(e)
� � � � � � � � �
� ��� ,� � � �� � �� � � � � � � � � � � � , � � � � � � � � � � .
(f)� � � � � � � � � �
�� � ,
� � � �� � �
� � � � � , � � � � � � � � � � � � � � � .(g)� � � � � � � � � , � � � � � � � � � , � � � � � � � � � � . (h)
� � � � � � � � � � ,� � � �� � ��
� � , � � � � � � � � � .Answer 8.9 � � � � � � � � � �Answer 8.10 (a)
2 4 6 8 10x
0.25
0.5
0.75
1
1.25
1.5
1.75
2y
PSfrag replacements
-axis-axis-axis
(b)
� � �� �� if � � � ��� � � � � � �� if
� � � �� if � � � � �
2 4 6 8 10x
0.25
0.5
0.75
1
1.25
1.5
1.75
2y
PSfrag replacements
-axis-axis-axis

337
(c)
� � ���
� if � � � ��� � � � � � �� if
� � � �� if � � � �� � �
� �� �� if � � �
� if �� �
� �
2 4 6 8 10x
0.25
0.5
0.75
1
1.25
1.5
1.75
2y
PSfrag replacements
-axis-axis-axis
Answer 8.11 (a)�� � � � � . (b) � � � � � . (c) �
��� � .
(d) �� � � � � . (e) � � � � � � �
� . (f) � � � ,� � �
.
Answer 8.12 (a)� �� � � � � � � � � � � � , set
� � � to get� �� � � � � � (b)� � � � � �
� , set� � � to get � � �
� . (c)� � � � �� � � � � � � � � � � � � � � � �
,
set� � � to get
� �� � � � � � .Answer 8.13 (a) � � � � � � � �
� � � � � � � � � � . (b) � � � � � ��� � � = � � �� � � � � = � �� � � � � � � � = �� � � � � � �
� � .
Answer 9.1 The graph is given below:
-2 -1.5 -1 -0.5 0.5 1 1.5 2x
-2
-1.5
-1
-0.5
0.5
1
1.5
2y
PSfrag replacements
-axis-axis-axis
Answer 9.2 � �� � � � � .Answer 9.3 (a5) (1) horizontally dilate (compress) by afactor of
�; (2) horizontal shift right by �� ; (3) vertical di-
late (expand) by a factor of � ; vertical shift up by .� �� �� � � � ��� �
if � � ��� ��� � if � � ��
-2 -1 1 2 3 4x
5
10
15
20
25
30y
PSfrag replacements
-axis-axis-axis
Answer 9.4 (a)
-4 -3 -2 -1 1 2 3 4x
-1
1
2
3
4y
PSfrag replacements
-axis-axis-axis
(b) No. (c)
� � � � � � �� ���
� if ��
��
����
if �� ��� �
��� �
�if � � �
��� if � � �
-4 -3 -2 -1 1 2 3 4x
-1
1
2
3
4y
PSfrag replacements
-axis-axis-axis
� � �� �� � ���
� if ��
� ���� �
�if � �
��� �
� ��
if � � �� �
� if � ��
-4 -3 -2 -1 1 2 3 4x
-4
-3
-2
-1
1y
PSfrag replacements
-axis-axis-axis
(d) Here are the graphs of � � � � � � � and � � �� � � � � , respec-tively:

338 APPENDIX B. ANSWERS
-4 -3 -2 -1 1 2 3 4x
-1
1
2
3
4y
PSfrag replacements
-axis-axis-axis
-4 -3 -2 -1 1 2 3 4x
-1
1
2
3
4y
PSfrag replacements
-axis-axis-axis
(e) Here are the graphs of � � � � � � � and � � � � �� � � , respec-tively:
-4 -3 -2 -1 1 2 3 4x
-1
1
2
3
4y
PSfrag replacements
-axis-axis-axis
-4 -2 2 4x
-1
1
2
3
4y
PSfrag replacements
-axis-axis-axis
(f) �� � �� . (g) �
� �� . (h) �� � � �� .
Answer 9.5 (a) Here are the pictures:
-8 -6 -4 -2 2 4 6 8
-8
-6
-4
-2
2
4
6
810 years
PSfrag replacements
-axis-axis-axis
-8 -6 -4 -2 2 4 6 8
-8
-6
-4
-2
2
4
6
815 years
PSfrag replacements
-axis-axis-axis
(b) Approximately �
� � � � � years. (c) Approximately �� ��� � years.
Answer 9.6 (a)� �� �� � � � � � �
� � � ��
with domain � ��� � . (b) � � � � � � � � �
�� on the domain � � �
�� . � �� � � � � � �
�� (c) Max of
� �� � is � � � and max of
�� � � � � � � � �is
� � � � � (when �� �� .).
Answer 9.7 (c) Horizontally shift the graph of � � ��
tothe right � units.
Answer 9.8 (a) � � �� �
� �� �
�� � .
Answer 9.9 (a) � � � � � � � � � � � � � � � � � � � � � � � ��
� � � � �� �
Answer 9.10 (a) � � �
����� � � � � .
Answer 10.1 (a) � � ���
� � �� � � � .
(b) � � � �� � � � ��� � � � � � � .(c) � � � � � � �
� � � ��
� � � .(d) � ��� � ��� � � � � � ��� � � .
Answer 10.2 (a)� �� � � � � � � �
�
��� � � � . � � � � � � � � �� �
�
��
� � � � . � � � � � � � � � � � � � � � � ��
� ��� ..
� ��� � � �
�� � � �� � � � � � � , where � �
� � and � ��
� �� .
(d)� �� � � � � � � �
�� � .
� �� � � � � � � � �
�� � .
� � � � � � � � � � .� ��� � � �
� � , defined for all � .Answer 10.3 (a)
� ��� � if �� ��
��� � if � � �

339
-3 -2 -1 1 2 3
-2
2
4
6
8
10
PSfrag replacements
-axis-axis-axis
(b)
� � � � ��
if �� �
��
if � � �
-3
-2
-1
0
1
2
3
-3 -2 -1 0 1 2 3
PS
fragrep
lacemen
ts
-axis-axis-axis
(c)
� ��� � � if � � �� if � � �
−2
−3 −2 −1 1 2 3
2
1
−1
PSfrag replacements
-axis-axis-axis
Answer 10.4 (c)� � �
� �Answer 10.6 For
� � �� � � � , we have
� � � � � �� �� �
� if��
� if� � � �� if � �
Obtain graphically by horizontally streching by a factor of�, then shifting right by
�. For
� � �� � � � � � , we have
� � �� � � � � �� �� �
� if� �
� if �� � �� if � �
Obtain graphically by horizontally streching by a factor of�, then shifting right by � .
Answer 10.7 area= � � � � � � .
Answer 10.9 (a)� � � � � � � � � � � � � � , � � � � � � � � � � � � � �� �
� � , � � � � �� � � � � � � � �� � �� � .
(b) The of the entire 16 minute recording is below; thefirst four minutes being the original track:
2 4 6 8 10 12 14 16
loudness
t
PSfrag replacements
-axis-axis-axis
Answer 11.1 (a) domain of�
=��
�� �� �
��� ; range=�=� ��� ��� � . (b)
� � � � � � � � � � �� � .
Answer 11.2
Answer 11.3 (c)� � � � � � � � � � � � � �� on the domain� �
�� � � � � � .
Answer 11.4 (b)(ii)
x
y
PSfrag replacements
-axis-axis-axis
(b)(iii)
x
y
PSfrag replacements
-axis-axis-axis
Answer 11.5 Every horizontal line crosses the graph of� � ��� at most once:

340 APPENDIX B. ANSWERS
x
y
PSfrag replacements
-axis-axis-axis
Answer 11.6 Only (B) is one-to-one on the entire domain.
Answer 11.7
Answer 11.8 (a)� � � �
� ��
����� �
� � � . (c) �� � �� � �� � � �� � � � � � �
� �.
Answer 11.9 (a) (1)
x
y
PSfrag replacements
-axis-axis-axis
(2) �� � � � � � � � � � �� has domain and range all real num-
bers. (3)
y
x
PSfrag replacements
-axis-axis-axis
(4)� � � � � � � � � � � � � � �� � � � � � � �� � �
� � � ��
�� � � ;� � � � � � � � � � � � � � � � �
� � � � � � � � �� �� .
Answer 11.10 (a) �� � � � � � � � �
� �� � � � . Domain:� � � � � hours; Range: � � � �
� � ft. (b) � � hours.
(c) � � � � � � � � � � � �
� � �� � � � � . Domain: � � � �
� �ft.; Range: � � � � � hours.
Answer 11.11 (a) 2 nanoseconds. (f) domain � =� � � �
� � � ; range � =� � � � � � � .
Answer 12.1 (a) domain=��
�� ��� � ; range=
� ��� �� � � ; zero
at �� � ; horizontal asymptote � � �
; vertical asymptote
��� ; graph below:
-4 -2 2 4x
-15
-10
-5
5
10
15y
PSfrag replacements
-axis-axis-axis
Answer 12.2 (a)
-8 -6 -4 -2 2 4 6 8x
-8
-6
-4
-2
2
4
6
8y
PSfrag replacements
-axis-axis-axis
(b)� � � � � � � � � � � � � � ��� � � �� on the domain � � � . (c)
� � � � � � � � � � � � � � � �� � � �� on the domain � � � . (d) Graphof � � � � � � � :
-8 -6 -4 -2 2 4 6 8x
-8
-6
-4
-2
2
4
6
8y
PSfrag replacements
-axis-axis-axis
Graph of � � �� �
� � � :
-8 -6 -4 -2 2 4 6 8x
-8
-6
-4
-2
2
4
6
8y
PSfrag replacements
-axis-axis-axis

341
Answer 12.3 (a) ��. (b)
�� � � � �
.
Answer 12.4 (a) � � � � � � � � � � �� � � � . (b) �� � � � � � ft.; �
� � � �
� �ft. (c) 10 ft.
Answer 12.5 (a) � � � � � � � � � . (b) � � � � � � � � � (c)
�� �
� . (d) � � � � ��� � � � � �� � � � � � . (e)�� .
Answer 12.6 (a) � � � � � � � � � � � � � � � � (b) �� � � � � � � � � � �� �� (c) 70 or �
��
Answer 12.7� �� ��
� �� � � � ���� ����
���� �� � � ��� � � � ��� � . The horizon-
tal asymptote is � � � �� �
.
Answer 12.8� �� �� � � � � �� � �
Answer 12.9 You should study for 11.25 hours.
Answer 12.10 (a) � � � � � (b)� � � � � � �� � � � � � ��� � � � � � �� (c) �
� � (d) �
� � � and � � � .Answer 12.11
Answer 12.12 (a)� � � �� �� � � � � � � � � � �� � � � � . (b) �
�$ � � � .
(d)�� � � � � � � � � � � � � � � � � �� � � � � . Domain
� � � � �� � �
� � �� � � � � � � , Range� � � � � � � �
� � � � � . The inverse functiontakes the number of customers per day as an input valueand gives the amount the shop spent on advertising as anoutput value.
Answer 13.1 (a) � � � � � � or 0.233874 rads. (b) 1.0788degs or .01882 rads. (c) 5.7296 degs or � � � � � � � �
.
Answer 13.2 (a) 6080 ft. (b) 29.95 mph. (c) 15.63 knots.
Answer 13.3 (a) � � � sq. in. (b)� � � � . (c)
� � � � � in. (d)� ��� � �in. (e) � � � �
in.
Answer 13.4 (a) 1413.7 sq. ft. (c) 4.244 sec.
Answer 13.5 2160 miles.
Answer 13.6 (a)� � � � � hrs. (b) � � � � mph. (c) �
� � � � hrs.,
� � � � miles. (d) � ��� � � miles.
Answer 13.7 (b)� � � � � sq. in. (c) �
�
� � sq. in.
Answer 13.8 0.685078 miles.
Answer 13.9 Middle picture: shaded area= �� � ��� sq. in.
Answer 14.1 (a) � � �� � � ft/hr,� � � � � ft/min, � � � � � �
ft/sec,� � � � in/sec. (b) You will get� � � � � drips/sec, which rounds
up to � drips/sec. (c) � � � liters. (d) ��� � � liters.
Answer 14.2 (a) � �� � � rad = 10.47 radians. (b) � � � � rev *
1 hour/rev = .64 hours = 38.2 minutes. (c) Using (2.2.2),� �� ��� �� � � � = 219.91 meters.
Answer 14.3 �� � RPM.
Answer 14.4 (a) �� � � �� � rad/sec, � � � � � �� � ft/sec. (b)
� � � � � � � in/sec, �� � � RPM.
Answer 14.5 (b) 700 ft. (c) 70 sec. (d) 15000 sq. ft.
Answer 14.6 (a) � � � � � RPM at � � � inch;� � � � � RPM at ��
inches. (b) � � � � � inches.
Answer 14.7 (a) � � � � ��� � � � ft. (b)� � � � � � � � � rad. (c)� � /5 rad counterclockwise from
�.
Answer 14.8 (a) � � � ft/sec;� �� � �
mph. (b) � � � RPM. (c)
� � RPM; � � � ft/sec. (d) � � � � rad =� � � � � ;
� � � �ft. (e) � � �
sec; � � � � rad.
Answer 14.9 � � � inches.
Answer 14.10 (a) 70.65 mph. (b) 32.72 mph.
Answer 14.11 � � � � � inches.
Answer 15.1 (a)� �
� � � � � �ft. (b)
�� ��� � � sin
� �� � . (c)�� � � miles.
Answer 15.2 (a) If you impose coordinates with the cen-ter of the wheel at
� ��� � ��� � � � � � , then ground level coin-cides with the � -axis. (a)
� �� � � � � �� � � � � � � , where �� � �� � ��� � � � cos
� � ��
� � � � � � � � � and � �� � � � � ��� � � � sin� � ��
�
� � � � � � � � � � � � � � � � . (b)� � � � � � � �� � � � � � � � � . (c) First find
the slope of a radial line from the wheel center out to Tiff’slaunch point.
Answer 15.3 (a) � � � � � � � � � ���� � � �
�
Answer 15.4 290 ft.
Answer 15.5 (a)��
� � � � � ��� � � � . (b)� � � � � � � � � � . (c)�
� � � � � � � � ��� � � � � . (d)� � � � � � � � � � � � � .
Answer 15.6 � ��
� � � � � and ��� � � � � .
Answer 15.7 Dam is 383 feet high.
Answer 15.8 � ��
ft.
Answer 15.9 (a)� � � � � � � � � � � � � �� � � � . (d) Aaron
crosses the track at�
� � �� �
� � � �� � � � � � and Michael’s lo-
cation at this instant is��
� � � � � � � ��� � � � �Answer 15.10
Answer 15.11 (a) 204.74 ft. (b) no.
Answer 15.12 If the origin is the bottom left corner of thetable, then the ball should first hit the position
� ��� �� � , thenthe position
� ���� � � ��� .Answer 15.13 If SeaTac is the origin, they intersect at�
��
� � � � � � � � � � � � � .Answer 15.14 (a)
� �� � �� � sin� � � . (b) max= ��� . (c) min =
��. (d) �� and � � �
� � .

342 APPENDIX B. ANSWERS
Answer 15.15 Top right scenario: (a)�
��
� � � rad.(b)� � � � � � � �
� � �� (c)� �� � � � � cos
�� � � �
� � �� � � � sin�� � � �� � �� � � . (d)
� �� �� �
� � � � � ��� � � � ��� � . � � ��� � � � � � � � � � � � � � .� � � � ��� � � � � � � � � � ��� . � � � � � ��� � � � � � � � � � � � .Answer 16.1 (a) � � � � , �
� � � , � � � � � , � � � � . (b) �� � � . (c)� � � � and � � � � . (d) none.
Answer 16.2 (b) sin� �� �� �� � � � cos
� �� � � .
-6 -4 -2 2 4 6
-2
-1.5
-1
-0.5
0.5
1
1.5
2
PSfrag replacements
-axis-axis-axis
(c)
-6 -4 -2 2 4 6
-2
-1.5
-1
-0.5
0.5
1
1.5
2
PSfrag replacements
-axis-axis-axis
Answer 16.3 (a)
-6 -4 -2 2 4 6
-2
-1.5
-1
-0.5
0.5
1
1.5
2
PSfrag replacements
-axis-axis-axis
(b)
-6 -4 -2 2 4 6
-2
-1.5
-1
-0.5
0.5
1
1.5
2
PSfrag replacements
-axis-axis-axis
(c)
0
5
10
15
-6 -4 -2 0 2 4 6PS
fragrep
lacemen
ts
-axis-axis-axis
(d)
-6 -4 -2 2 4 6
-4
-3
-2
-1
1
2
3
4
PSfrag replacements
-axis-axis-axis
(d) � �� � � � � � � � � � � , where � � ��� � � � � � � � � � � � .
Answer 16.4 (a) 7/25 or -7/25. (b) -0.6. (c) � � � �� .
Answer 16.5 In the first case,
one period
PSfrag replacements
-axis-axis-axis
Answer 16.6� � � � � � and
� �� � � � � , � � ��� � � ��� � � � � � � � � .Answer 16.7 (a)
� � � � � � � � sin� � � � , � � � � � � � sin
�� � ,� � � � � � � � � sin
�� � , � � � � � � � � sin
� � .Answer 16.8 (a)
� � � � � �sin
� � � ��
cos� � � . (b) minimize
� � � �on � � � � � � . (c)
� � � � � ft.
Answer 16.9 (a) and (b).
Answer 17.1 (a) 1, � ,� � , 1. (b) 6, 2, 0, -1.
Answer 17.2 (d)� �� � � �
sin� � �� � � � � � � � � � � � � �

343
Answer 17.3 (a)� �� � � � � � sin
� � �� � � � � � ��� � � � � � .Answer 17.4 (a)
� � � � sin� ����
� � ��� � , where
indi-cates hours after midnight. (b) � � ft. above low tide.
Answer 17.5 � � � , � � , � �� � � , � � � �
.
-10 -5 5 10t
10
20
30
40
50
PSfrag replacements
-axis-axis-axis
Answer 17.6 (a) A = 25, B = 5 seconds, C = 1.75, D = 28.(b)=1.75 and 4.25 seconds
Answer 17.7 (a) � � �� , � � � � � , � � � � � , � � � . (c)
� � � � � � sin� � ������ � �
� � � � � � � .Answer 17.8 No.
Answer 17.9 Top right scenario: ��� � � � sin
� � �� � � �� �� � � � ,
where� � � �
�� � � �
� � � � �� � � ; � �� � � � sin� � �� � � �� �
� � � � , where� � � �
�� � � � �
�� � � . Plots are below:
2 4 6 8t
-2
-1
1
2
x
PSfrag replacements
-axis-axis-axis
2 4 6 8t
-2
-1
1
2
y
PSfrag replacements
-axis-axis-axis
Answer 18.1 (a1) � , � � � � �, � � � �� � �
, � � � � � � , � � � � � �,
� � � � � � � , not defined.
Answer 18.2 (a) 9.39, 13.63, 11.09. (b) Feb. 3, Nov. 4.
Answer 18.3 (a) Principal solution: ��� � �
� � � , symmetrysolution: �
� � � ��� � � ; graph below with these two solutionsgraphically indicated:
-10 -5 5 10x
-2
-1.5
-1
-0.5
0.5
1
1.5
2y
PSfrag replacements
-axis-axis-axis
Answer 18.4� � � � � � hours of dry time each day.
Answer 18.5 (a)� � � � �
cos� � � � � � � �
��� � � � �
� � � tan� � � � � .
Answer 18.6 The key fact to use over and overis this:
��� � =M’s location after
seconds =�� � � cos
� � � � � � � � � � sin� � � � � � � ; � � � = T’s location after
seconds =�� � � cos
� � � � � � � � � � � � sin� � � � � � � � � .
Answer 18.7 (a) � � � � , � � � , � � � , � � �. (b) � �
�� �� �
�is not sinusoidal; its rule is
�� �� �
��
���
� � � sin� � � � � � � � � � �
if � � �� � � � � � � �
� � sin� � � � � � � � � � �if� � � � � � � � � � � � �
�� � �
� � � sin� � � � � � � � � � �
if � � �
�� � � � � � � � � � � � � �
� � sin� � � � � � � � � � �
if � � � � � � � � � � � � �� �
�� � �
� � � sin� � � � � � � � � � �
if � � �
�� � � � � � � � � � � � � �
� � sin� � � � � � � � � � �
if �� � � � � � � � � � � �
The graph of � ��� �� �
�is given below:
2.5 5 7.5 10 12.5 15 17.5 20−5
5
10
15
20
PSfrag replacements� -axis
� -axis
-axis

344 APPENDIX B. ANSWERS
Answer 18.8 (a) � � � � � � � ��� � � � � � � � � � � � ��� . (b) � �
� � � � � � � � � � The interior angle is 166.608 degs and so onesatellite covers 46% of the circumference. Thus you need3 (not two-point-something) satellites to cover the earth’scircumference. (c) � � � � �
� � � � � � The interior angle is74.047 degs and so one satellite covers 20.57% of the cir-cumference. Thus you need 5 satellites to cover the earth’scircumference. (d) Get an equation for the interior anglein terms of
. Solve
� � � � � arcsin � � � � � � � � � � � � ��� � = 20%of 360 degs = 72 degs. You’ll get
= 934.83 miles.
Answer 18.9 (f)
� � � ��� � � cos�
�� � �
� � � � � sin�
�� � �
� � � ,then plug in
�from (e).
Answer 18.10 (a) � � � � � � � � � � � � ��� � �� � � . Note
that� �
� � � � � � � , � � ��� � � � � � � � � � are also all validchoices for the phase shift. (b) maximum temperature=430
� �. (c) minimum temperature= 400
� �. (d) 12.1635
minutes. (e) 14.6456 minutes. (f) 6.80907 minutes.
Answer 18.11
Answer 18.12
Answer 18.13 (a)� � � � � ��� � � sin
� � ������ � � � � �� � � � �
� � � �� � ��. (d) The graph of
� �� � when� �
� � � is below; youneed to determine when the graph is below the horizontalaxis.
50 100 150 200 250 300 350t
-20
20
40
60
80
PSfrag replacements
-axis-axis-axis
Answer 18.14 (a) Domain: �� ������ �� � � � ; Range:
�� � � . One solution: �
� �� � �� ; graph is below:
-2 -1.5 -1 -0.5 0.5 1 1.5 2x
-2
2
4
6
8
PSfrag replacements
-axis-axis-axis
Answer 18.15 (a) Many possible answers; for example:� � � � � � � , � � � � � � � , � � � � � � , � � � � � � .Answer 18.16 Top row:
� �� � � � �
rad,� � ��� � � � � rad,
� � � � � � �rad.
Answer 18.17 Top left triangle: � � � � � � � �rad,
� �
� � � � � rad, �� � �
� .
Answer 19.1 (a) 31.5443; (b) 355.1134; (c) 36.4622; (d)0.0616; (e) 51,168; (f) 0.009794; (g)-84.2; (h) �
� � � � � � � �� � � � ��� � � � � �� � � � � an integer.
Answer 19.2 (a) � � � � �� � � (b) � � � �� � � . (d) � � ���� � �� � � � .Answer 19.3 (a1)
� � �� �� � � . � � � � � � �
� �� � � .Answer 19.4 If
� �� �
�, then
� � � � � � � � � � � � � � � � � � m�. If
� �� � � lb, then
� � � � � � � m�. To increase surface area
by 5%, must gain about � � � � � lb.
Answer 19.5 � � �� � � � � is obtained by vertically dilating� � � � ; it is vertically compressed. � � � ��� � is a horizontaldilation of � � � � ; it is horizontally stretched.
Answer 19.6 (a) � � � � � � � � cells. (b) True. (c) The twoformulas are identical.
Answer 19.7 (a) 261.31 Hz. (b) 440 Hz. (c) 27.5 Hz. (d)16.35 Hz.
Answer 19.8 (a)� � � � � . (b)
� � � � . (c)� � � � � � � � � � � .(d)
� � � � � � � � meters.
Answer 19.9 (a)��
�� is the higher curve. (d)
20 40 60 80 100p
0.2
0.4
0.6
0.8
fraction
PSfrag replacements
-axis-axis-axis
Answer 20.1 (a) ��� � � $ � � � � � � � � � � � � � � � � . (b) $1.11. (c)
It is below; should be $5.70 by the model.
Answer 20.2 (a) ��� �� � � � � � � � � � � � � � � , � � � � � � � � �
� � � .(b) �
�� ����� � �
� � � � � ��� � � � � �Answer 20.3 � �
� �� � � � � � � � � � � � � , ��
� ��
� � � � � � � � � � � � � � .Answer 20.4 (a) � � � � � � � � � � � ; no explosion. (b)
� � � � � � � � � � ; explosion. (c) � � � degrees.
Answer 20.5 (a) � � � �%. (b) � � � �
%.
Answer 20.6 If we use �� � �
and� � � � in
� � � , we gettwo data points and a corresponding exponential model:
� �� � � � �� �
�� �� � � � � � � � � � � �
� � ��� . The exponential modelgrows faster than the cubic model and eventually exceeds� �� � .

345
Answer 20.7 (c) The curve is modeled by � � � � � � � � � �� � � � � � � � � � � and the minimum height is 59.46feet.
Answer 21.1 (a) 0.6826; 2.3979; 3.3030; 3.3219;0.3010.(b) 3.555; 19.8; 0.0729. (c) �
�log � � � ; �
�log � � � � � � ;
����
��� � � log � � � � � .Answer 21.2 (a)
� � � � � ��� � � � � � � � � � . (b)
� meters.
Answer 21.3 (a) � � � � � � � � �� � � � . (b) � � � � � � � � � � � � .Answer 21.4 (a) 1:10. (b) 7.723. (c) A 7.2 quake is about5 times as intense as a 6.5 quake.
Answer 21.5 (a)� � �
years. (b) � � � � � %.
Answer 21.6 (a) A is 32.763 ft; B is 24.308 ft. (b) � �
�� � � ft or � �
�
� � � �ft. (c) After 125.64 ft. (d) 24.36 ft.
Answer 21.7 (a) 8.8 cm. (b) 135 cm. (c) 4.84 yrs. (d)Maximum possible length of the halibut.
Answer 21.8 (a)� �� � � � � � � � � � .
Answer 21.9 (c) � � � �� � � � � � � � � � � � . Valued at
$200,000 during �� � � .
Answer 21.10 (a) �� � � � � � � � (b) 1.392. (c) 0.3552. (d)
�� � . (e) �
�� � � � � . (f)-0.61. (g) sin
�� ��
� � � � � � � ;��
� � � � � �
�� � � or �
� � � � � � � � � � � .
Answer 21.11 (d) 8.617 weeks.
Answer 21.12
Answer 21.13 (a)2 volts. (b) Never zero since� �
is posi-tive for all � . (c)�
� � � � sin� � �� � � � �
�� � � � , so � � � � � �
� � � � � � � � � � � . (d) � � � ��� �� � � � � . (e) � � � � � � ��� � � � � � and
� � � � � � � � � � � � � � , � � ��� � � � � � � � � � are ALL so-lutions. Four of these lie in the domain � � � � . (f) Max-ima have coordinates
� � � � � � � � � � � � � � � and minima havecoordinates
� � � � � � � � � � � � � � � � , where � � ��� � � ��� � � � � � . (g)If we restrict
� � � to � � � � � � � , the inverse function hasrule:
� arcsin� ln � ��� ln
� � ��
ln� � � � � � � � �
If we restrict� �� � to � � � � � � � � � � � � � ��� � � � � � � , the
inverse function has rule:
� � � � � � � � arcsin� ln � ���� ln
� � ��
ln� � � � � � � � �
In particular, if we restrict� � � to � � � � � � � � , the inverse
function has rule:
�� � � � � arcsin
� ln � ���� ln� � �
�ln� � � � � � � � �
If we restrict� � � to � � � � � � � �
, the inverse function hasrule:
� � arcsin� ln � ���� ln
� � ��
ln� � � � � � � � �
If we restrict� � � to � � ��� � � � � � � � � � � �
� � � � � � � , theinverse function has rule:
� � � � � � � � � arcsin� ln � ���� ln
� � ��
ln� � � � � � � � �
In particular, if we restrict� �� � to � � � � � � � , the inverse
function has rule:
�� � � � � � arcsin
� ln � � �� ln� � �
�ln� � � � � � � � �
Answer 21.14 � � � � years.
Answer 21.15 (a) 2015 (b) 2048.
Answer 21.16
Answer 21.17 (a) � � � � �%.
Answer 21.18 Earning power will be equal at a time dur-ing the year
� � � .Answer 21.19 (a) �
�� � � �� � � � � � � � � � � � � ��� � .
Answer 21.20 First row:
� �� � � � � � � � � � � � , � � � � � � � � � � � � � � � � , � � � , � � � � � � � � � , � � � � � � � � � � � � � � .Answer 22.1 (d) Graph is below with locations at times � � (i.e.
� � � � � � ) and � (i.e.
�� � � � � ) indicated by
”dots”:
-1 1 2 3 4x
-6
-4
-2
2
4
y
PSfrag replacements
-axis-axis-axis
Answer 22.2 (a) Plots are below; heavy plot is for the cari-bou population.
5 10 15 20 25 30t
150
200
250
300population
PSfrag replacements
-axis-axis-axis
Answer 22.3 � � � � � � sec.

346 APPENDIX B. ANSWERS
Answer 22.4 (a) 6 feet. (b) � � � � � seconds. (c) No.
(d) At times � � � � � � � � � � � � � � � � � seconds it is 22 feet
above the floor. (e) Maximum height is 24.5675 feet. (f)Allyson teaches Lee a lesson. (g) � � � � � � � � � � � � �
� � � � �
� � � � �
�� � �
��.
Answer 22.5 (c) On domain � � ,
� � � � � � � cos� � � � �
� � � � � � sin� � � � �
��
(e) � � � � � � , � � � � � � .Answer 22.6 (a) �
� � � � � � � rad/sec. � = 18.85 mph. (b)
��� � � � � � cos
� � � � � � � � � � � � � � � � � � � � � � � � � sin� � � � � �� � � � � � � . (c) 200 ft.
Answer 22.7 (a) 0.9 minutes. (b)�
���
� � � � � � �� � � . (c)698.1ft. (d1) domain is � � �
� ��
seconds and range is� � � � � �� � � � � � . (d2)
� �� � � �� � � � cos
� � �� �
� � � � � � � � � � sin� � �� �
� � � � � � �����
(e)
��� � �
�� � � � cos
� � �� �� � � � � � � � � � sin
� � �� �� � � �
� � � �Answer 22.8 upper left: �
� � � �cos� � �� � , � � � �
�sin� � �� � . lower right: �
� � � �cos� � � ���� � � � � � � ,� �� � � � sin
� � � ���� � � � � � � .
Answer 23.1
Answer 23.2
Answer 23.3
Answer 23.4 (a) �� � � � � � � �
, � � � � � � � � � . (b)� � �� � � �
, � � � � � � , � � � � � � � . (c) 5.814 feet.
Answer 23.5 (a) 78.79 feet. (b) � = � � � � � � � � � � , � �� ��� �
� . (c) �
� ��� � = � � ��� � � � ft and � � ��� � = � � � ftso the distance is 32.83 ft. (d) crosses into green at�
� � � � � � � � � � � � � � � at time
= 3.3347 seconds.
Answer 23.6 At time �
� , location is
� �� �� � � � � � � � � � ;dist(origin,P(1))=5.385 ft. Closest when
�� � and dis-
tance is � � � � � � � � � � � � � . Distance from origin 6 feetwhen � � � � � � � � � � � � � � � � � � � ; i.e. when
� ��� .Answer 23.7 (a) �
� � � � � �� � � � � � � � � � � � � �
� � � � � � (b) 11.78 ft. (c) Enters green when
= 2.08 sec at� �� � � � �� � � � � � � � � . Leaves green when
= 11.92 sec at�
��� � � � �� � � � � � � � � � . (d)
= 6.8862 sec, � = 0.4878,
� = 0.3902 . (e)� �� � � � � �
� � � � � � � � � � � � � � � �� � � � � � � � � � � �
� � � � � � � � � � � � � (f) Two answers:
=5.849 sec, so � = 4.932, � = 3.946;
= 7.923, so � = -
3.956, � = -3.165.
Answer 23.8 (a) Impose coordinates with the bottom leftpocket the origin; by 15.1.1 ball hits cushion at
� ��� ��� � � .�� � � � � � � � � � �
if � � � � � � �� � � � � �
�� � � � � if
� � � � � � � � � � ��� � � ��� � � � � �
��
if � � � � � � �� � � � � � � �
�� �
�� � � � � if
� � � � � � � � � � �Answer 23.9 (a) If we impose coordinates with � =
� ��� ��� .� � � � � � , � � � � � � , puck � moves � � � � ft/sec.
� � � � � � � � � , � � �� � � � � � � � .(d)� � � � � � � � � � � � � � � � � � . (e)
� � � � � � � and �� � � � � . (f) Never.
Answer 23.10 Michael��� � � � �� � � � � � � � � , Tina
� � � �� � � � �� � � � � � � � � � � � � � . Study distance SQUARED from�� � to� � � . Closest when
� � � � � � � sec and distance is54.3 ft.

Appendix C
GNU Free DocumentationLicense
Version 1.1, March 2000
Copyright c�
2000 Free Software Foundation, Inc.59 Temple Place, Suite 330, Boston, MA 02111-1307 USAEveryone is permitted to copy and distribute verbatim copies of this li-cense document, but changing it is not allowed.
Preamble
The purpose of this License is to make a manual, textbook, or otherwritten document “free” in the sense of freedom: to assure everyone theeffective freedom to copy and redistribute it, with or without modifyingit, either commercially or noncommercially. Secondarily, this Licensepreserves for the author and publisher a way to get credit for their work,while not being considered responsible for modifications made by others.
This License is a kind of “copyleft”, which means that derivative worksof the document must themselves be free in the same sense. It com-plements the GNU General Public License, which is a copyleft licensedesigned for free software.
We have designed this License in order to use it for manuals for freesoftware, because free software needs free documentation: a free pro-gram should come with manuals providing the same freedoms that thesoftware does. But this License is not limited to software manuals; it canbe used for any textual work, regardless of subject matter or whether itis published as a printed book. We recommend this License principallyfor works whose purpose is instruction or reference.
347

348 APPENDIX C. GNU FREE DOCUMENTATION LICENSE
C.1 Applicability and Definitions
This License applies to any manual or other work that contains a noticeplaced by the copyright holder saying it can be distributed under theterms of this License. The “Document”, below, refers to any such manualor work. Any member of the public is a licensee, and is addressed as“you”.
A “Modified Version” of the Document means any work containing theDocument or a portion of it, either copied verbatim, or with modificationsand/or translated into another language.
A “Secondary Section” is a named appendix or a front-matter sectionof the Document that deals exclusively with the relationship of the pub-lishers or authors of the Document to the Document’s overall subject (orto related matters) and contains nothing that could fall directly withinthat overall subject. (For example, if the Document is in part a textbookof mathematics, a Secondary Section may not explain any mathematics.)The relationship could be a matter of historical connection with the sub-ject or with related matters, or of legal, commercial, philosophical, ethicalor political position regarding them.
The “Invariant Sections” are certain Secondary Sections whose titlesare designated, as being those of Invariant Sections, in the notice thatsays that the Document is released under this License.
The “Cover Texts” are certain short passages of text that are listed, asFront-Cover Texts or Back-Cover Texts, in the notice that says that theDocument is released under this License.
A “Transparent” copy of the Document means a machine-readablecopy, represented in a format whose specification is available to thegeneral public, whose contents can be viewed and edited directly andstraightforwardly with generic text editors or (for images composed ofpixels) generic paint programs or (for drawings) some widely availabledrawing editor, and that is suitable for input to text formatters or forautomatic translation to a variety of formats suitable for input to textformatters. A copy made in an otherwise Transparent file format whosemarkup has been designed to thwart or discourage subsequent modifi-cation by readers is not Transparent. A copy that is not “Transparent” iscalled “Opaque”.
Examples of suitable formats for Transparent copies include plainASCII without markup, Texinfo input format, LATEX input format, SGMLor XML using a publicly available DTD, and standard-conforming sim-ple HTML designed for human modification. Opaque formats includePostScript, PDF, proprietary formats that can be read and edited only byproprietary word processors, SGML or XML for which the DTD and/orprocessing tools are not generally available, and the machine-generatedHTML produced by some word processors for output purposes only.
The “Title Page” means, for a printed book, the title page itself, plus

C.2. VERBATIM COPYING 349
such following pages as are needed to hold, legibly, the material thisLicense requires to appear in the title page. For works in formats whichdo not have any title page as such, “Title Page” means the text near themost prominent appearance of the work’s title, preceding the beginningof the body of the text.
C.2 Verbatim Copying
You may copy and distribute the Document in any medium, either com-mercially or noncommercially, provided that this License, the copyrightnotices, and the license notice saying this License applies to the Docu-ment are reproduced in all copies, and that you add no other conditionswhatsoever to those of this License. You may not use technical measuresto obstruct or control the reading or further copying of the copies youmake or distribute. However, you may accept compensation in exchangefor copies. If you distribute a large enough number of copies you mustalso follow the conditions in section 3.
You may also lend copies, under the same conditions stated above,and you may publicly display copies.
C.3 Copying in Quantity
If you publish printed copies of the Document numbering more than100, and the Document’s license notice requires Cover Texts, you mustenclose the copies in covers that carry, clearly and legibly, all these CoverTexts: Front-Cover Texts on the front cover, and Back-Cover Texts on theback cover. Both covers must also clearly and legibly identify you as thepublisher of these copies. The front cover must present the full title withall words of the title equally prominent and visible. You may add othermaterial on the covers in addition. Copying with changes limited to thecovers, as long as they preserve the title of the Document and satisfythese conditions, can be treated as verbatim copying in other respects.
If the required texts for either cover are too voluminous to fit legibly,you should put the first ones listed (as many as fit reasonably) on theactual cover, and continue the rest onto adjacent pages.
If you publish or distribute Opaque copies of the Document number-ing more than 100, you must either include a machine-readable Trans-parent copy along with each Opaque copy, or state in or with each Opaquecopy a publicly-accessible computer-network location containing a com-plete Transparent copy of the Document, free of added material, whichthe general network-using public has access to download anonymouslyat no charge using public-standard network protocols. If you use thelatter option, you must take reasonably prudent steps, when you begin

350 APPENDIX C. GNU FREE DOCUMENTATION LICENSE
distribution of Opaque copies in quantity, to ensure that this Transpar-ent copy will remain thus accessible at the stated location until at leastone year after the last time you distribute an Opaque copy (directly orthrough your agents or retailers) of that edition to the public.
It is requested, but not required, that you contact the authors of theDocument well before redistributing any large number of copies, to givethem a chance to provide you with an updated version of the Document.
C.4 ModificationsYou may copy and distribute a Modified Version of the Document underthe conditions of sections 2 and 3 above, provided that you release theModified Version under precisely this License, with the Modified Versionfilling the role of the Document, thus licensing distribution and modifica-tion of the Modified Version to whoever possesses a copy of it. In addition,you must do these things in the Modified Version:
� Use in the Title Page (and on the covers, if any) a title distinct fromthat of the Document, and from those of previous versions (whichshould, if there were any, be listed in the History section of theDocument). You may use the same title as a previous version if theoriginal publisher of that version gives permission.
� List on the Title Page, as authors, one or more persons or enti-ties responsible for authorship of the modifications in the ModifiedVersion, together with at least five of the principal authors of theDocument (all of its principal authors, if it has less than five).
� State on the Title page the name of the publisher of the ModifiedVersion, as the publisher.
� Preserve all the copyright notices of the Document.
� Add an appropriate copyright notice for your modifications adjacentto the other copyright notices.
� Include, immediately after the copyright notices, a license noticegiving the public permission to use the Modified Version under theterms of this License, in the form shown in the Addendum below.
� Preserve in that license notice the full lists of Invariant Sections andrequired Cover Texts given in the Document’s license notice.
� Include an unaltered copy of this License.
� Preserve the section entitled “History”, and its title, and add to it anitem stating at least the title, year, new authors, and publisher of

C.4. MODIFICATIONS 351
the Modified Version as given on the Title Page. If there is no sectionentitled “History” in the Document, create one stating the title, year,authors, and publisher of the Document as given on its Title Page,then add an item describing the Modified Version as stated in theprevious sentence.
� Preserve the network location, if any, given in the Document forpublic access to a Transparent copy of the Document, and likewisethe network locations given in the Document for previous versionsit was based on. These may be placed in the “History” section. Youmay omit a network location for a work that was published at leastfour years before the Document itself, or if the original publisher ofthe version it refers to gives permission.
� In any section entitled “Acknowledgements” or “Dedications”, pre-serve the section’s title, and preserve in the section all the substanceand tone of each of the contributor acknowledgements and/or ded-ications given therein.
� Preserve all the Invariant Sections of the Document, unaltered intheir text and in their titles. Section numbers or the equivalent arenot considered part of the section titles.
� Delete any section entitled “Endorsements”. Such a section may notbe included in the Modified Version.
� Do not retitle any existing section as “Endorsements” or to conflictin title with any Invariant Section.
If the Modified Version includes new front-matter sections or appen-dices that qualify as Secondary Sections and contain no material copiedfrom the Document, you may at your option designate some or all of thesesections as invariant. To do this, add their titles to the list of InvariantSections in the Modified Version’s license notice. These titles must bedistinct from any other section titles.
You may add a section entitled “Endorsements”, provided it containsnothing but endorsements of your Modified Version by various parties –for example, statements of peer review or that the text has been approvedby an organization as the authoritative definition of a standard.
You may add a passage of up to five words as a Front-Cover Text, anda passage of up to 25 words as a Back-Cover Text, to the end of the listof Cover Texts in the Modified Version. Only one passage of Front-CoverText and one of Back-Cover Text may be added by (or through arrange-ments made by) any one entity. If the Document already includes a covertext for the same cover, previously added by you or by arrangement madeby the same entity you are acting on behalf of, you may not add another;but you may replace the old one, on explicit permission from the previouspublisher that added the old one.

352 APPENDIX C. GNU FREE DOCUMENTATION LICENSE
The author(s) and publisher(s) of the Document do not by this Licensegive permission to use their names for publicity for or to assert or implyendorsement of any Modified Version.
C.5 Combining Documents
You may combine the Document with other documents released underthis License, under the terms defined in section 4 above for modifiedversions, provided that you include in the combination all of the InvariantSections of all of the original documents, unmodified, and list them allas Invariant Sections of your combined work in its license notice.
The combined work need only contain one copy of this License, andmultiple identical Invariant Sections may be replaced with a single copy.If there are multiple Invariant Sections with the same name but differentcontents, make the title of each such section unique by adding at the endof it, in parentheses, the name of the original author or publisher of thatsection if known, or else a unique number. Make the same adjustmentto the section titles in the list of Invariant Sections in the license noticeof the combined work.
In the combination, you must combine any sections entitled “History”in the various original documents, forming one section entitled “His-tory”; likewise combine any sections entitled “Acknowledgements”, andany sections entitled “Dedications”. You must delete all sections entitled“Endorsements.”
C.6 Collections of Documents
You may make a collection consisting of the Document and other docu-ments released under this License, and replace the individual copies ofthis License in the various documents with a single copy that is includedin the collection, provided that you follow the rules of this License forverbatim copying of each of the documents in all other respects.
You may extract a single document from such a collection, and dis-tribute it individually under this License, provided you insert a copy ofthis License into the extracted document, and follow this License in allother respects regarding verbatim copying of that document.
C.7 Aggregation With Independent Works
A compilation of the Document or its derivatives with other separate andindependent documents or works, in or on a volume of a storage or dis-tribution medium, does not as a whole count as a Modified Version of the

C.8. TRANSLATION 353
Document, provided no compilation copyright is claimed for the compila-tion. Such a compilation is called an “aggregate”, and this License doesnot apply to the other self-contained works thus compiled with the Docu-ment, on account of their being thus compiled, if they are not themselvesderivative works of the Document.
If the Cover Text requirement of section 3 is applicable to these copiesof the Document, then if the Document is less than one quarter of theentire aggregate, the Document’s Cover Texts may be placed on coversthat surround only the Document within the aggregate. Otherwise theymust appear on covers around the whole aggregate.
C.8 TranslationTranslation is considered a kind of modification, so you may distributetranslations of the Document under the terms of section 4. Replacing In-variant Sections with translations requires special permission from theircopyright holders, but you may include translations of some or all In-variant Sections in addition to the original versions of these InvariantSections. You may include a translation of this License provided thatyou also include the original English version of this License. In case of adisagreement between the translation and the original English version ofthis License, the original English version will prevail.
C.9 TerminationYou may not copy, modify, sublicense, or distribute the Document ex-cept as expressly provided for under this License. Any other attemptto copy, modify, sublicense or distribute the Document is void, and willautomatically terminate your rights under this License. However, par-ties who have received copies, or rights, from you under this License willnot have their licenses terminated so long as such parties remain in fullcompliance.
C.10 Future Revisions of This LicenseThe Free Software Foundation may publish new, revised versions of theGNU Free Documentation License from time to time. Such new versionswill be similar in spirit to the present version, but may differ in detail toaddress new problems or concerns. See http://www.gnu.org/copyleft/.
Each version of the License is given a distinguishing version number.If the Document specifies that a particular numbered version of this Li-cense ”or any later version” applies to it, you have the option of followingthe terms and conditions either of that specified version or of any later

354 APPENDIX C. GNU FREE DOCUMENTATION LICENSE
version that has been published (not as a draft) by the Free SoftwareFoundation. If the Document does not specify a version number of thisLicense, you may choose any version ever published (not as a draft) bythe Free Software Foundation.
ADDENDUM: How to use this License for yourdocumentsTo use this License in a document you have written, include a copy ofthe License in the document and put the following copyright and licensenotices just after the title page:
Copyright c�
YEAR YOUR NAME. Permission is granted to copy,distribute and/or modify this document under the terms ofthe GNU Free Documentation License, Version 1.1 or any laterversion published by the Free Software Foundation; with theInvariant Sections being LIST THEIR TITLES, with the Front-Cover Texts being LIST, and with the Back-Cover Texts beingLIST. A copy of the license is included in the section entitled“GNU Free Documentation License”.
If you have no Invariant Sections, write “with no Invariant Sections”instead of saying which ones are invariant. If you have no Front-CoverTexts, write “no Front-Cover Texts” instead of “Front-Cover Texts beingLIST”; likewise for Back-Cover Texts.
If your document contains nontrivial examples of program code, werecommend releasing these examples in parallel under your choice offree software license, such as the GNU General Public License, to permittheir use in free software.

Index
-axis, 13 -axis,positive, 13 � -coordinate system, 13, 14� -axis, 13� -axis,positive, 14� -intercept, 45� �
root, 267
adjacent, 200amplitude, 235analogue LP’s, 191angle, 170angle,central, 170angle,initial side, 170angle,standard position, 170angle,terminal side, 170angle,vertex, 170angular speed, 185arc,length, 177arc,subtended, 170arccosine function, 252arcsine function, 252arctangent function, 252area,sector, 177aspect ratio, 15axis scaling, 15axis units, 16axis,horizontal, 13axis,vertical, 13
belt/wheel problems, 193
CD’s, 193central angle, 170chord, 179circle, 29circles, 30, 84circles,circular function, 208
circles,great, 181circles,point coordinates on, 208circles,unit, 32circular function, 207circular function,triangles, 207circular motion, 308circular function, 169, 199, 204,
205circular function,circles, 208circular function,inverse, 247circular function,special values, 201circular motion, 187, 308, 309compound interest, 278, 280compounding periods, 278continuous compounding, 283converting units, 1coordinates,imposing, 13cosecant function, 210cosine function, 200, 228cotangent function, 210curves,intersecting, 32
db, 295decibel, 295decreasing function, 82degree, 89, 172degree method, 171degree,minute, 172degree,second, 172density, 3dependent variable, 63difference quotient, 42digital compact disc, 193dilation, 128dilation,horizontal, 131dilation,vertical, 129directed distance, 21, 316directed quantity, 318
355

356 INDEX
distance, directed, 21distance,between two points, 19,
21distance,directed, 316domain, 63
e, 281, 282effective yield, 284envelope of hearing, 296equation,quadratic, 51equatorial plane, 180even function, 221exponential decay, 271exponential function, 281exponential growth, 271exponential modeling, 277exponential type, 271
function, 62function,circular, 169, 199, 204,
205, 207function,cosine, 200, 228function,decreasing, 82function,even, 221function,exponential, 281function,exponential type, 271function,logarithm base b, 291function,logarithmic, 287function,multipart, 86function,natural logarithm, 288function,odd, 221function,periodic, 220function,picturing, 59, 61function,rational, 163function,sine, 200, 228function,sinusoidal, 169, 227, 233function,step, 143function,tangent, 200, 228function,trigonometric, 227function, � � � � � , 200function, � � � � , 228function, � � � �
� � � , 251function, � � � � � , 200function, � � � � , 228function, � � � �
� � � , 251function, � ��� � � � � � � , 200
function, � ��� � � , 228function, � ��� � �
� � � , 251
graph, 1, 30, 31, 44graph,circular function, 222graph, � � � � � , 224graphing, 1great circle, 180, 181
horizon circle, 261horizontal line, 30horizontal axis, 13horizontal speed, 315, 318
identity,composition, 252identity,even/odd, 221identity,key, 220identity,periodicity, 220imposing coordinates, 13, 17independent variable, 63interest, 278intersecting curves, 32intervals, 64inverse circular function, 247, 250,
251inverse function, 247
knot, 183
latitude, 180line,horizontal, 30line,vertical, 30linear speed, 186linear functions, 69linear modeling, 39linear motion, 315, 319lines, 39, 45lines,horizontal, 29lines,parallel, 51lines,perpendicular, 51lines,point slope formula, 44lines,slope intercept formula, 45lines,two point formula, 44lines,vertical, 29logarithm conversion formula, 292logarithm function base b, 291logarithmic function, 287

INDEX 357
longitude, 180loudness of sound, 294LP’s, 191
mean, 234meridian, 180meridian,Greenwich, 180modeling, 1modeling,exponential, 277modeling,linear, 39modeling,sinusoidal, 233motion,circular, 187, 308, 309motion,in the coordinates, 315motion,linear, 315, 319mulitpart function, 86multipart functions, 86
natural logarithm, 287natural logarithm function, 288natural logarithm function, prop-
erties, 288nautical mile, 183navigation, 180
odd function, 221origin, 13
parabola,three points determine,105
parametric equation, 305parametrized curves, 305, 306parametrized curves,as function graph,
307parametrized curves,motivation, 304period, 235periodic, 220, 227periodic rate, 278phase shift, 234piano frequency range, 272picturing a function, 59, 61polynomial,degree, 89positive -axis, 13positive � -axis, 14principal, 278principal domain, 251principal domain, cosine, 251principal domain, sine, 251
principal domain, tangent, 251principal solution, 250Pythagorean Theorem, 20
quadrants, 15quadratic formula, 51
radian, 176radian method, 174range, 63rate, 4, 45rate of change, 4rational function, 163reflection, 124restricted domain, 63right triangles, 207RPM, 186rules of exponents, 267
scaling, 15secant function, 210sector,area, 177semicircles, 84shifting, 126shifting,principle, 127sign plot, 81sine function, 200, 228sinusoidal function, 227sinusoidal function, 169, 233sinusoidal modeling, 233slope, 42solve the triangle, 247sound pressure level, 295speed,angular, 185speed,circular, 187speed,horizontal, 315speed,linear, 186speed,vertical, 315standard position, 170standard angle, 170standard form, 31step function, 143
tangent function, 200, 228triangle,sides, 199trigonometric function, 227trigonometric ratios, 201

358 INDEX
unit circle, 32units, 1
vertical axis, 13vertical line test, 68vertical lines, 30vertical speed, 315, 318