physics 211 space - time & space-space diagrams kinetic equations of motion projectile motion...
TRANSCRIPT
Physics 211
•Space - time & space-space diagrams•Kinetic Equations of Motion•Projectile motion•Uniform circular motion•Moving coordinate systems•Relative motion
•Galilean Transformation of coordinates
3: Two Dimensional Motion
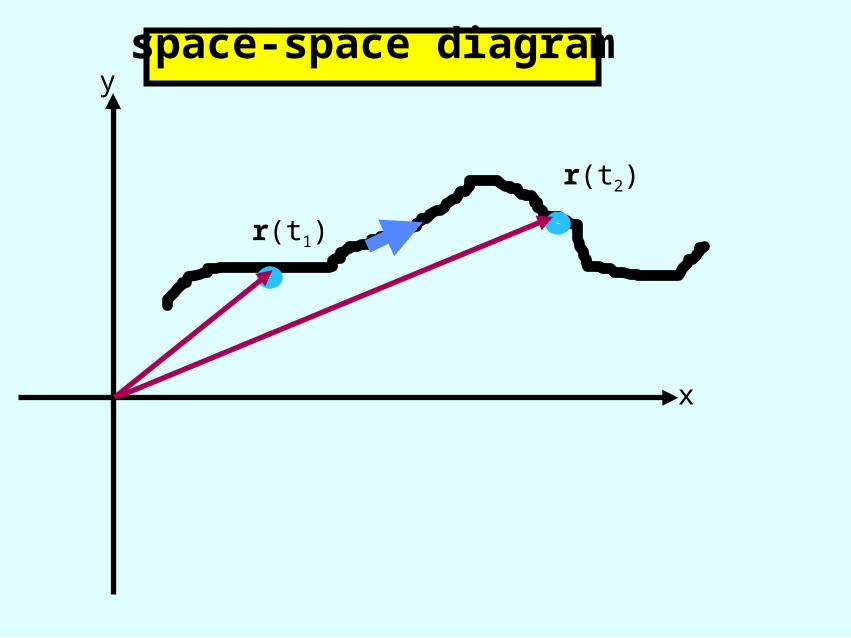
r(t1)
r(t2)
x
yspace-space diagram
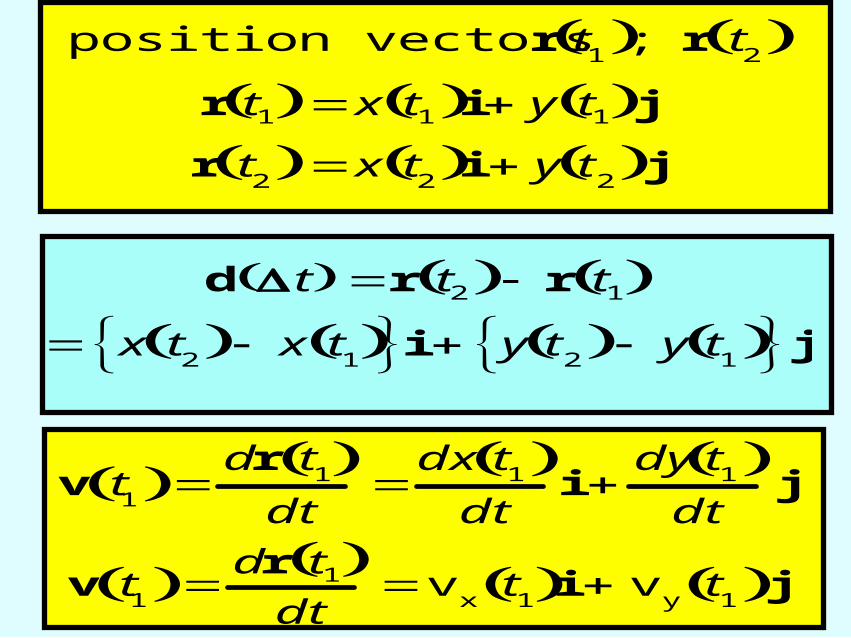
position vectors r t1 ; r t2
r t1 x t1 i y t1 j
r t2 x t
2 i y t2 j
d t r t2 r t1 x t
2 x t1 i y t
2 y t1 j
v t1
dr t1
dtdx t
1 dt
i dy t
1 dt
j
v t1
dr t1 dt
vx t1 i vy t1 j

a t1
dv t1 dt
d2x t
1
dt2i d 2y t
1
dt 2j
a t1
dv t1
dtax t1 i ay t1 j
speed = v t v t dx t dt
2
dy t dt
2
acceleration = a t a t d2x t dt 2
2
d 2y t dt 2
2
average quantities = final value-initial valuetime taken

If a is constant ax and ay being constant
then we can use Kinetic Equations of Motion
d t 12
at2 v 0 t
v t at v 0
•acceleration due force of gravity near the •earths surface is approximately constant •Neglect air resistance•Neglect rotation of earth
Then we can use kinetic equations of motion for projectile motion
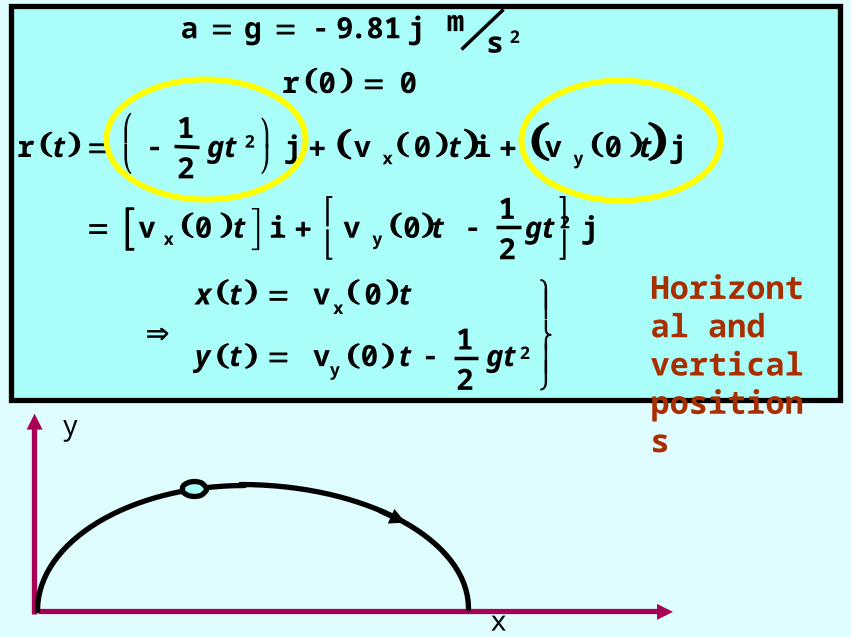
a g 9. 81 j ms 2
r 0 0
r t 12gt 2
j v x 0 t i v y 0 t j
v x 0 t i v y 0 t 12gt 2
j
x t vx 0 t
y t vy 0 t 12gt 2
y
x
Horizontal and vertical positions
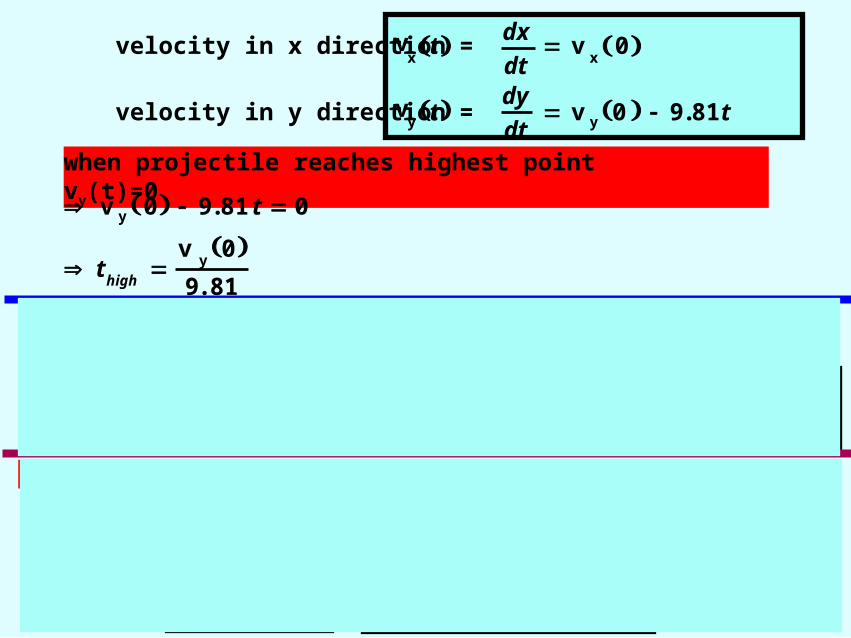
velocity in x directionxt =
dx
dt v
x0
velocity in y direction y t = dy
dt v y 0 9 .81 t
when projectile reaches highest point vy(t)=0 v y 0 9 .81 t 0
thigh
v
y0
9 . 81
x thigh
vx
0 v y0
9. 81;
y thigh
v y 0 2
9. 81-
12
9.81v y 0 9 .81
2
=12
v y 0 2
9 . 81=
v y 0 2
19 . 62
projectile hits ground when y t 0
t vy
0 1
29. 81 t
0
t 0 or t 2 vy0
9 .81 x
max
2 vx
0 v y0
9 . 81
v
v
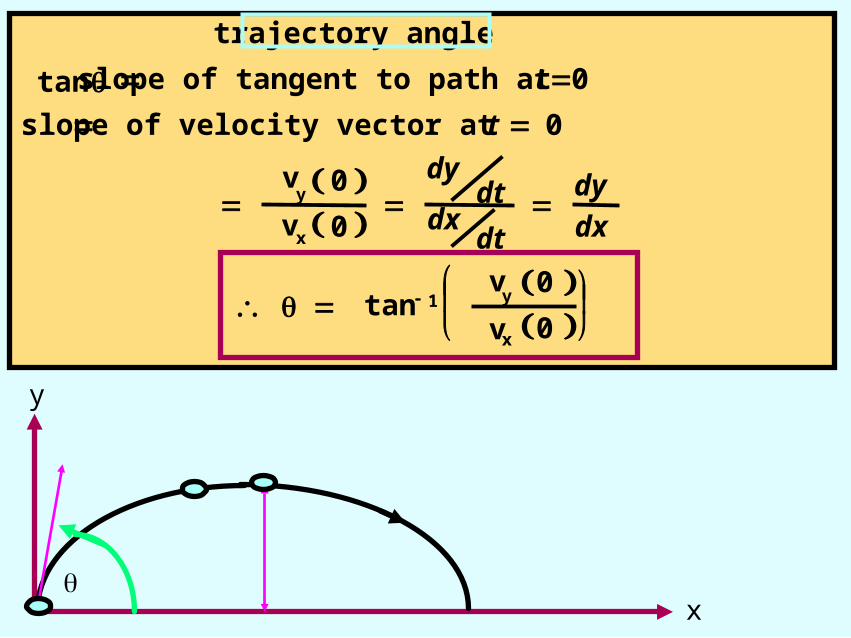
trajectory angle
tan slope of tangent to path at t0
slope of velocity vector at t 0
v
y 0 vx 0
dy
dtdx
dt
dy
dx
tan 1v
y 0 vx 0
y
x
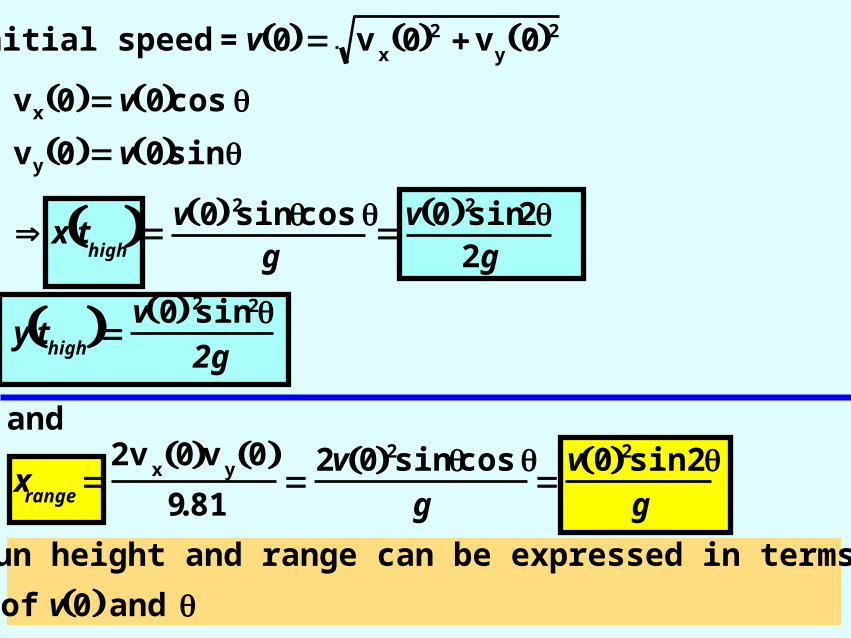
initial speed = v 0 vx 0 2 vy 0 2
vx 0 v 0 cos
vy 0 v 0 sin
x thigh
v 0 2sin cos g
v 0 2sin 22g
y thigh v 0 2sin 2
2g
and
xrange
2vx 0 vy 0
9.81
2v 0 2 sin cos g
v 0 2 sin 2
g
Maximun height and range can be expressed in terms
of v 0 and

y
x
v(0)
v 0 2 sin 22g
v 0 2 sin (2
g
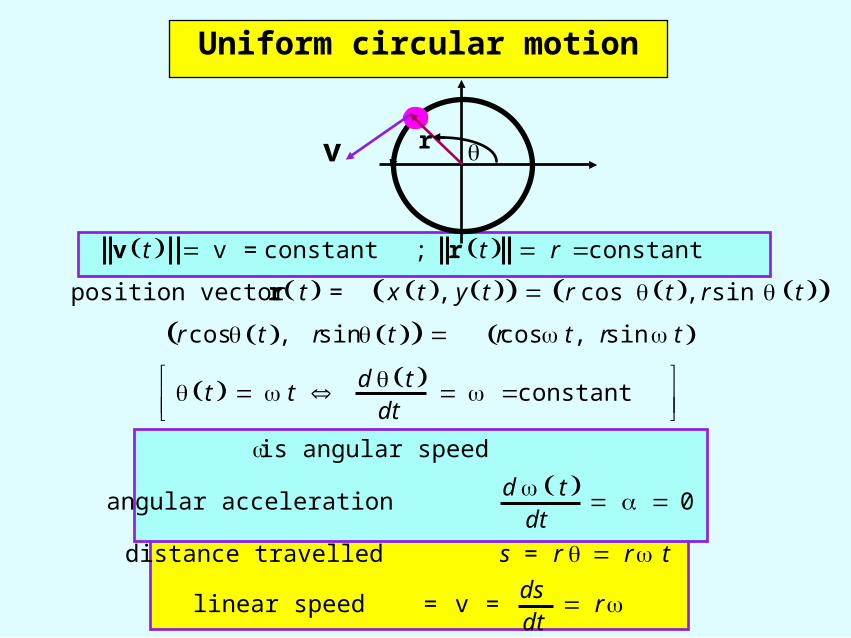
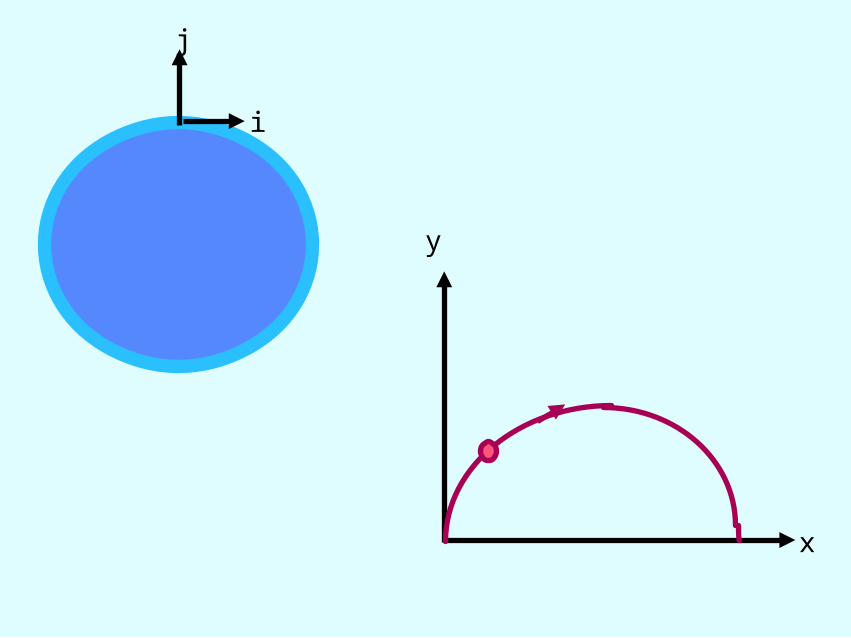
Uniform circular motion
rv
v t v = constant ; r t r constant
position vector r t = x t , y t r cos t , r sin t r cos t , r sin t rcos t , r sin t
t t d t dt
constant
is angular speed
angular acceleration d t dt
0
distance travelled s = r r t
linear speed = v =dsdt
r
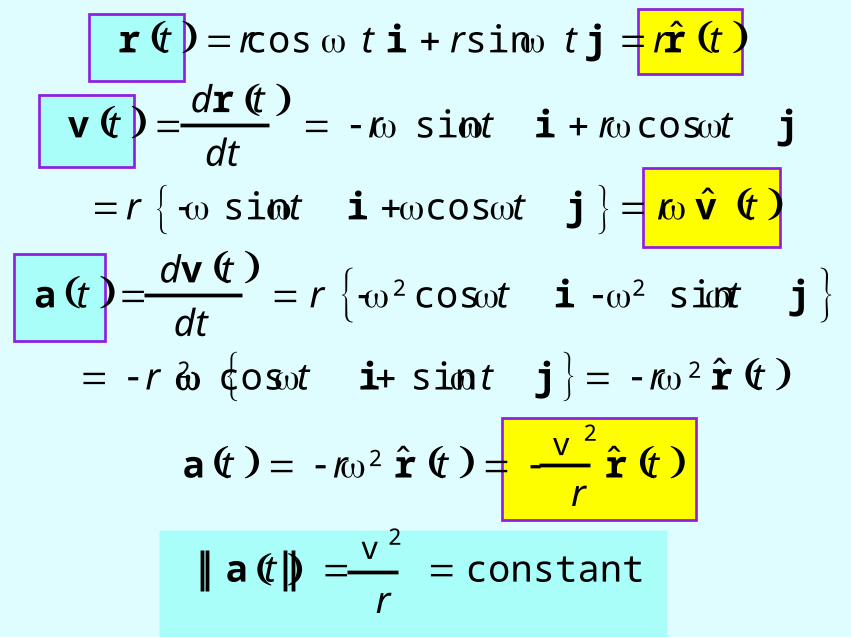
r t rcos t i r sin t j r ˆ r t
v t dr t dt
r sint i r cost j
r sint i cos t j r ˆ v t
a t dv t dt
r 2 cost i 2 sint j r 2 cost i sin t j r 2 ˆ r t
a t r 2 ˆ r t v 2
rˆ r t
a t v 2
r constant

Relative motion
observer 1
observer 2
u(t)=u=constant
r2(t)
r1(t)
r(t)=ut

r1t position vector of object in coordinate system
r2t position vector of object in coordinate system
r1 t r2 t ut
r2t r
1t u t
v2t v
1t u
a2t a
1t
Galilean Transformation 1 2
1
2
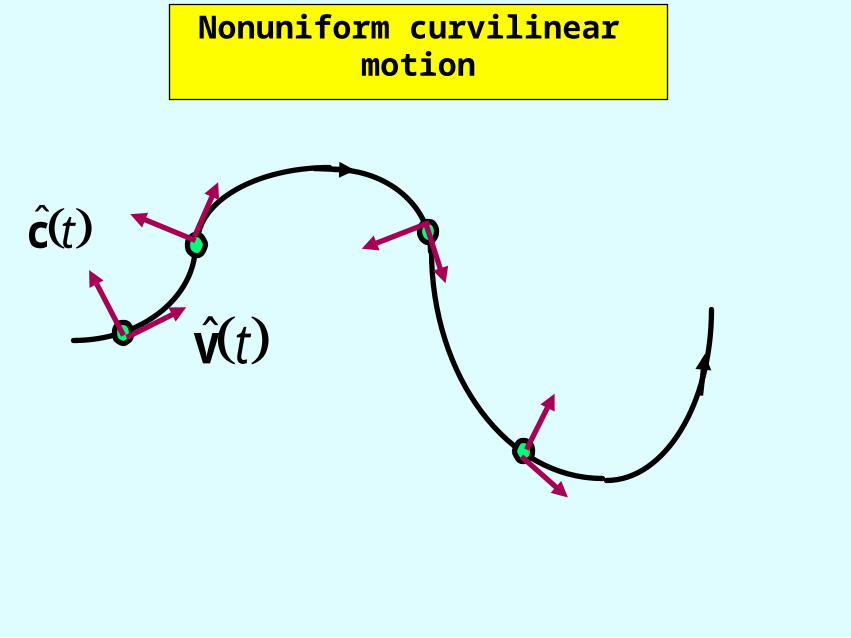
Nonuniform curvilinear motion
ˆ v t
ˆ c t
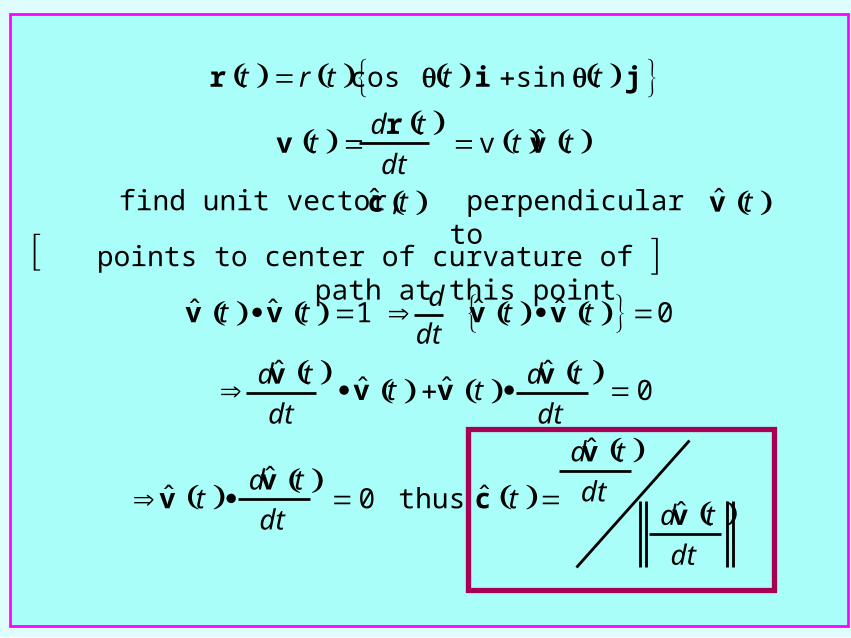
r t r t cos t i sin t j
v t dr t dt
v t ˆ v t
find unit vector, ˆ c t perpendicular to ˆ v t
points to center of curvature of path at this point
ˆ v t ˆ v t 1 d
dtˆ v t ˆ v t 0
d ˆ v t dt
ˆ v t ˆ v t dˆ v t dt
0
ˆ v t d ˆ v t dt
0 thus ˆ c t
d ˆ v t dt
d ˆ v t dt

a t dv t dt
dv t dt
ˆ v t v t dˆ v t dt
a t at t ̂ v t +ar t ̂ c t
ar t v t 2
r t radial (centripetal) acceleration
at t r t t tangential acceleration
r t distance to center of curvature