penn s tate department of industrial engineering 1 revenue management in the context of dynamic...
TRANSCRIPT

1
PENNPENNSSTATETATE
Department of Industrial Engineering
Revenue Revenue Management in the Management in the Context of Dynamic Context of Dynamic
Oligopolistic Oligopolistic CompetitionCompetition Terry L. FrieszTerry L. Friesz
Reetabrata Mookherjee Reetabrata Mookherjee Matthew A. RigdonMatthew A. Rigdon
The Pennsylvania State UniversityIndustrial and Manufacturing
Engineering{tfriesz, reeto, mar409}@psu.edu
Presented atPresented atINFORMS Revenue Management and Pricing Section INFORMS Revenue Management and Pricing Section
Conference, MITConference, MIT

2
PENNPENNSSTATETATE
Department of Industrial Engineering
OutlineOutline
Review the Dynamic Oligopolistic Network Review the Dynamic Oligopolistic Network Competition model for non-service industriesCompetition model for non-service industries
Modify the above to treat Service/Revenue Modify the above to treat Service/Revenue Management (RM) decision environment Management (RM) decision environment
The Modeling PerspectiveThe Modeling Perspective Non-Cooperative Differential Oligopolistic Game Non-Cooperative Differential Oligopolistic Game
among service providersamong service providers Re-formulate as Differential Variational Inequlaity Re-formulate as Differential Variational Inequlaity
(DVI) and exploit available algorithms(DVI) and exploit available algorithms Overview of One Particular Numerical Overview of One Particular Numerical
MethodMethod

3
PENNPENNSSTATETATE
Department of Industrial Engineering
Dynamic Oligopolistic Dynamic Oligopolistic Network CompetitionNetwork Competition
This is a This is a foundation modelfoundation model upon upon which other models of dynamic which other models of dynamic network competition may be based: network competition may be based: supply chains, telecomm, ecommerce, supply chains, telecomm, ecommerce, urban and intercity freight.urban and intercity freight.
We assume We assume Cournot-Nash-Bertrand Cournot-Nash-Bertrand (CNB) non-cooperative behavior(CNB) non-cooperative behavior..
We use equilibrium dynamics that We use equilibrium dynamics that enforce enforce flow conservation.flow conservation.

4
PENNPENNSSTATETATE
Department of Industrial Engineering
Firms' Decisions (Supply-Firms' Decisions (Supply-Production-Distribution)Production-Distribution)
location and scale of activitylocation and scale of activity mix of input factorsmix of input factors timing of input factor deliveriestiming of input factor deliveries inventory and backorder levelsinventory and backorder levels pricesprices output levelsoutput levels timing of shipmentstiming of shipments shipping/distribution patternsshipping/distribution patterns

5
PENNPENNSSTATETATE
Department of Industrial Engineering
NotationNotation ControlsControls
StatesStates
Time Time
pattern Shipping ,
rateOutput ,
Demand ,
||||
02
||||
02
||||
02
FW
f
FN
f
FN
f
ttLs
ttLq
ttLc
CONTINUED
Inventory ,||||
01 FN
fttHI
timecontinuous ofinstant an is ,
,
0
110
f
f
ttt
tt
Space of square integrable functions for real
interval [t0,tf]
Space of square integrable functions for real
interval [t0,tf]
Sobolov Space for real interval [t0,tf]
Sobolov Space for real interval [t0,tf]

6
PENNPENNSSTATETATE
Department of Industrial Engineering
):( and ):( '' ''
ffqqffcc ffff
NotationNotation Functions Functions
Non-own allocations of demandsNon-own allocations of demands
are viewed as fixed by firm are viewed as fixed by firm f f
)( :cost shippingUnit
)( :cost Backorder / Inventory
)( :cost production Variable
: (price) demand Inverse
i
hr
I
qV
c
p
fi
ffi
Fg
gii
CONTINUED
Taken as Taken as exogenous data exogenous data by firm by firm ff

7
PENNPENNSSTATETATE
Department of Industrial Engineering
Inventory DynamicsInventory Dynamics
Inventory Dynamics are equilibrium Inventory Dynamics are equilibrium dynamics, namely differential flow dynamics, namely differential flow conservation equations:conservation equations:
ff
iWw
fw
Ww
fw
fi
fi Nicssq
dt
dI
oi
di
,,1
Total In-Flow
Total Out-Flow

8
PENNPENNSSTATETATE
Department of Industrial Engineering
Firm’s objectiveFirm’s objective Net Present Value of Profit of each
Cournot-Nash firm f F:
f
ff
f f
t
t
Ni
fi
fi
Ww
fww
Ni Ni
fi
fi
Fg
gii
tffffff dt
tIstr
tqVctceqcsqc
0 ),()(
),(,),;,,(
Gross Revenue
Variable Production
Cost
Total Distribution
Cost
Inventory Cost

9
PENNPENNSSTATETATE
Department of Industrial Engineering
Other constraintsOther constraints
0
0
0
, ~
)(;)0(
ff
ff
ff
fi
fi
fi
fi
sS
cC
FfNiKLIKI
These reflect bounds on terminal inventories/backorders, as well as restrictions on output and consumption and shipment variables (controls).

10
PENNPENNSSTATETATE
Department of Industrial Engineering
Summary of ConstraintsSummary of Constraints
The constraints are :The constraints are :
1.1. Shipment DynamicsShipment Dynamics
2.2. Inventory DynamicsInventory Dynamics
3.3. Inventory / Backorder Initial and Inventory / Backorder Initial and Terminal Time ConstraintsTerminal Time Constraints
4.4. Upper and lower bounds on the Upper and lower bounds on the controls: output, consumption and controls: output, consumption and shipmentsshipments

11
PENNPENNSSTATETATE
Department of Industrial Engineering
Optimal Control Optimal Control Problem for Each Problem for Each
FirmFirm For each firm For each firm ff FF: :
sconstraintInventory and
Capacity Subject to :),,(
where
),,(
subject to
);,;,,(max
fff
f
ffff
ffffff
sqc
sqc
tqcsqc
This is a continuous time This is a continuous time OptimalOptimal
Control ProblemControl Problem
This is a continuous time This is a continuous time OptimalOptimal
Control ProblemControl Problem

12
PENNPENNSSTATETATE
Department of Industrial Engineering
Cournot – Nash Cournot – Nash EquilibriaEquilibria
The solutions of the below DVI are The solutions of the below DVI are Cournot – Nash Equilibria:Cournot – Nash Equilibria:
f
Ff
fff
Ff
t
t
Ww
fi
fif
i
f
Ni Ni
fi
fif
i
ffi
fif
i
f
fff
sqc
dt
sss
H
qqq
Hcc
c
H
sqc
f
f
f f
where
,, allfor
0
such that ,, Find
0 **
**
**
***
Hamiltonian formed by the OCP for each firm f F

13
PENNPENNSSTATETATE
Department of Industrial Engineering
Observations Regarding Observations Regarding DVI FormulationDVI Formulation
The preceding re-statement of dynamic The preceding re-statement of dynamic oligopolistic network competition as a oligopolistic network competition as a differential variational inequality (DVI) differential variational inequality (DVI) allows powerful results on existence, allows powerful results on existence, computation and convergence to be computation and convergence to be applied.applied.
In particular paper by Friesz et al (2004) In particular paper by Friesz et al (2004) generalizes Pontryagin’s maximum generalizes Pontryagin’s maximum principle from optimal control theory to principle from optimal control theory to the DVI setting.the DVI setting.

14
PENNPENNSSTATETATE
Department of Industrial Engineering
Revenue Revenue Management for Management for
Oligopolistic Oligopolistic Competition in the Competition in the
Service SectorService Sector

15
PENNPENNSSTATETATE
Department of Industrial Engineering
The Pure RM Decision The Pure RM Decision EnvironmentEnvironment
Abstract service providersAbstract service providers No variable costsNo variable costs Fixed capacity environmentsFixed capacity environments No concept of Inventory/BackorderNo concept of Inventory/Backorder Faces variable demandFaces variable demand Low product varietyLow product variety

16
PENNPENNSSTATETATE
Department of Industrial Engineering
Our RM Competitive Our RM Competitive EnvironmentEnvironment
Service firms are involved in a Service firms are involved in a dynamic oligopolistic dynamic oligopolistic competitioncompetition
Firms compete to capture Firms compete to capture demands for servicesdemands for services
Price dynamics are a classical Price dynamics are a classical price-tatonnement model price-tatonnement model articulated at the market level.articulated at the market level.

17
PENNPENNSSTATETATE
Department of Industrial Engineering
Our RM Competitive Our RM Competitive EnvironmentEnvironment
The The time scaletime scale we consider is, we consider is, neither short nor long, rather of neither short nor long, rather of sufficient length that allows prices to sufficient length that allows prices to reach equilibrium, but not long reach equilibrium, but not long enough for firms to re-locate, open enough for firms to re-locate, open or close the businessor close the business..
CONTINUED

18
PENNPENNSSTATETATE
Department of Industrial Engineering
NotationNotation
10
1
10
],[ time,Continuous :
time terminalFinite :
timeinitial Finite :
service particularA :
firm particularA :
Services ofSet :
Firms ofSet :
f
f
ttt
t
t
Si
Ff
S
F

19
PENNPENNSSTATETATE
Department of Industrial Engineering
StatesStates Price variables :Price variables :
where where
, at time
servicefor priceMarket :
0 f
i
ttt
Sit
CONTINUED
||
01
01
,:
,S
fi
fi
ttHSi
ttH

20
PENNPENNSSTATETATE
Department of Industrial Engineering
Market DemandMarket Demand Market demand is known for each of Market demand is known for each of
the services the services ii S S and instant of time and instant of time tt [[tt00,,ttff]]
therefore,therefore,
f
S
fi
i
ttLttHtD
SitD
,,:,
service for the demandMarket :,
021||
01
||
02 ,:
S
fi ttLSiDD

21
PENNPENNSSTATETATE
Department of Industrial Engineering
ControlsControls Demand allocation variables:Demand allocation variables:
where where
Non-own demand for firm Non-own demand for firm f f FF (exogenous) (exogenous)
firmby provided
servicefor demandfor fraction The :
FfSi
tu fi
||||
02
||
02
02
,:
,:
,
FS
ff
S
ff
if
ff
i
ttLFfuu
ttLSiuu
ttLu
fFguu gf :

22
PENNPENNSSTATETATE
Department of Industrial Engineering
ControlsControls Rates of service provision:Rates of service provision:
wherewhere
Industry rate of provision of service Industry rate of provision of service
iiSS
firmby
service ofprovision of rate The :
FfSi
tv fi
CONTINUED
||||
02
||
02
02
,:
,:
,
FS
ff
S
ff
if
ff
i
ttLFfvv
ttLSivv
ttLv
Fg
gii vV

23
PENNPENNSSTATETATE
Department of Industrial Engineering
Price DynamicsPrice Dynamics Price of the service Price of the service i i SS changes changes
based on an excess demand based on an excess demand
Sitttt
Sit
SivtD
SiVtDdt
d
ff
i
fi
fi
Fg
giii
iiii
,, 0
,
,
0
0,0
Excess demandExcess demand

24
PENNPENNSSTATETATE
Department of Industrial Engineering
Each firm’s objectiveEach firm’s objective Each firm Each firm f f FF maximizes Net maximizes Net
Present Value (NPV) of profit Present Value (NPV) of profit (revenue) (revenue) ff((uuff,v,vff, u, u-f-f,v,v-f -f ,t,t))
ft
t
tf
Sii
fii
tfffff ebdttDuetvuvu
0
00,,,;,
NPV of Revenue NPV of
Fixed Cost
Nominal discount rate

25
PENNPENNSSTATETATE
Department of Industrial Engineering
ConstraintsConstraints Each firm has a finite upper bound Each firm has a finite upper bound
on each type of service they provide;on each type of service they provide;
We defineWe define
1
firmby provided service
ofprovision of rate of boundUpper :
f
i
fi
FfSi
||: Sfi
f Si

26
PENNPENNSSTATETATE
Department of Industrial Engineering
ConstraintsConstraints Logical as well as capacity Logical as well as capacity
constraints of each firm constraints of each firm f f FF are: are:
0
0
, ,
1
f
f
fi
fii
fi
Fg
gi
v
u
FfSivtDu
Siu
CONTINUED

27
PENNPENNSSTATETATE
Department of Industrial Engineering
Feasible Control SetsFeasible Control Sets Set of feasible controls for firmSet of feasible controls for firm f f FF
Fg
gi
fii
f
fiii
iiiiff
f
Siu
SivtDu
SittttSit
SitDdt
dvu
i
1
,0
],,[ 0 ;
,:;
00,0

28
PENNPENNSSTATETATE
Department of Industrial Engineering
Firm’s optimal control Firm’s optimal control problemproblem
Each firm Each firm f f FF seeks to solve the seeks to solve the following problem with following problem with uu-f -f ,v,v-f-f as as exogenous inputs :exogenous inputs :
0 1
0
0
,
subject to
,;,;,max
0,0
0
f
Fg
gi
ffi
fi
fi
iii
iiii
t
t Si
fiii
tfffff
uSiu
SivDu
Sitππtπ
SiπtDdt
dπ
dtutDetvuvuJf
fff vu ,

29
PENNPENNSSTATETATE
Department of Industrial Engineering
Differential Variational Differential Variational Inequality (DVI)Inequality (DVI)
Cournot-Nash-Bertrand differential Cournot-Nash-Bertrand differential (i.e. dynamic) games are a specific (i.e. dynamic) games are a specific realization of the DVI problemrealization of the DVI problem
Solutions of the following DVI are Solutions of the following DVI are the Nash equilibria :the Nash equilibria :
Ψvudtvv
v
Huu
u
H
Ψvu
Ff Si
t
t
fi
fif
i
ffi
fif
i
ff
, allfor 0
such that , find
0
**
**
**

30
PENNPENNSSTATETATE
Department of Industrial Engineering
Numerical Numerical ExampleExample

31
PENNPENNSSTATETATE
Department of Industrial Engineering
5 arc 4 node network5 arc 4 node network
FirmFirm22
FirmFirm11
FirmFirm44
FirmFirm33
a1
a5
a4
a3
a2
Market 1
Market 4
Market 2
Market 3

32
PENNPENNSSTATETATE
Department of Industrial Engineering
5 arc 4 node network5 arc 4 node networkPathPath Arc Arc
sequencsequencee
PP11 aa11
PP22 aa22
PP33 aa1, 1, aa33
PP44 aa11, a, a44
PP55 aa11, a, a33, a, a55
PP66 aa22, a, a55
PP77 aa33
PP88 aa44
PP99 aa33, a, a55
PP1010 aa55
NodeNode22
NodeNode11
NodeNode44
NodeNode33
a1
a5
a4
a3
a2

33
PENNPENNSSTATETATE
Department of Industrial Engineering
Summary of Controls and Summary of Controls and StatesStates
29 controls : 1010 states : states :
44
34
33
24
23
22
14
13
12
11
I
II
III
IIII
310
210
29
28
27
110
19
18
17
16
15
14
13
12
11
44
33
22
11
44
34
33
24
23
22
14
13
12
11
h
hhhh
hhhhhhhhhh
qqqqc
ccccc
cccc

34
PENNPENNSSTATETATE
Department of Industrial Engineering
Other InformationOther Information linear demand linear demand quadratic variable costquadratic variable cost quadratic inventory costquadratic inventory cost NN = 20 = 20 (time steps) (time steps) L = 20L = 20 (planning horizon) (planning horizon) Step size, Step size, =1=1 Bounds on Controls : 0 and 75Bounds on Controls : 0 and 75 These choices lead to nearly 700 These choices lead to nearly 700
variables.variables.

35
PENNPENNSSTATETATE
Department of Industrial Engineering
Computational Computational ResultsResults
for Spatial for Spatial OligopolyOligopoly

36
PENNPENNSSTATETATE
Department of Industrial Engineering
Inventory DynamicsInventory Dynamics
-300
-250
-200
-150
-100
-50
0
50
100
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
Time
Uni
ts
I11 I12 I13 I14 I22 I23 I24 I33 I34 I44

37
PENNPENNSSTATETATE
Department of Industrial Engineering
Production output ratesProduction output rates
0
10
20
30
40
50
60
70
80
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Time
Uni
ts
q11 q22 q33 q44

38
PENNPENNSSTATETATE
Department of Industrial Engineering
Flow between O-D pairFlow between O-D pair
0
20
40
60
80
100
120
140
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Time
Uni
ts
OD 1-2 OD 1-3 OD 1-4 OD 2-3 OD 2-4 OD 3-4
39
PENNPENNSSTATETATE
Department of Industrial Engineering
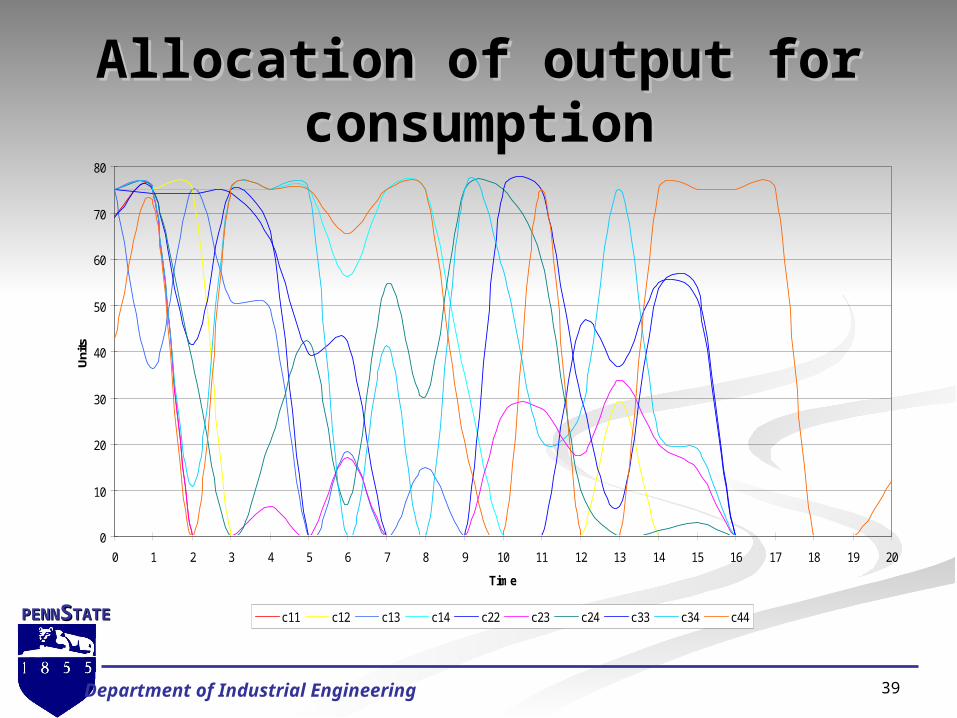
Allocation of output for Allocation of output for consumptionconsumption
0
10
20
30
40
50
60
70
80
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Time
Uni
ts
c11 c12 c13 c14 c22 c23 c24 c33 c34 c44
40
PENNPENNSSTATETATE
Department of Industrial Engineering
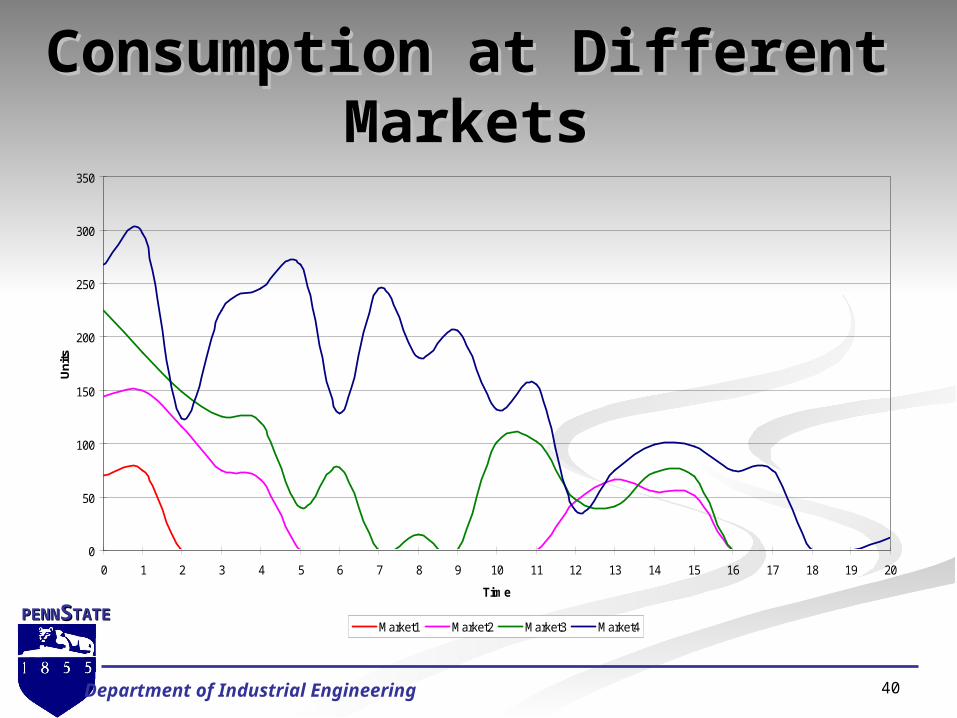
Consumption at Different Consumption at Different MarketsMarkets
0
50
100
150
200
250
300
350
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Time
Un
its
Market1 Market2 Market3 Market4

41
PENNPENNSSTATETATE
Department of Industrial Engineering
NPV Profit of FirmsNPV Profit of Firms
0
1
2
3
4
5
6
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Mil
lio
ns
Time
Pro
fit
($)
Firm 1 Firm 2 Firm 3 Firm 4

42
PENNPENNSSTATETATE
Department of Industrial Engineering
SummarySummary Theoretical framework and Theoretical framework and
computational experimentation of the computational experimentation of the traditional production – distribution traditional production – distribution system in a dynamic network completed system in a dynamic network completed
Theoretical framework supporting Theoretical framework supporting extensions to non-network dynamic extensions to non-network dynamic service sector environment completed. service sector environment completed.
Extensions to a dynamic network service Extensions to a dynamic network service environment in progress.environment in progress.
Numerical experiments based on Numerical experiments based on discrete time approximation of very discrete time approximation of very large problem is underwaylarge problem is underway

43
PENNPENNSSTATETATE
Department of Industrial Engineering
SummarySummary Continuous time algorithms for descent Continuous time algorithms for descent
in Hilbert space without time in Hilbert space without time discretization have been designed and discretization have been designed and analyzed qualitativelyanalyzed qualitatively
Preliminary tests of continuous time Preliminary tests of continuous time algorithms are promisingalgorithms are promising
We have shown treatment of dynamics We have shown treatment of dynamics with explicit time lags is possible using with explicit time lags is possible using continuous time algorithms. This opens continuous time algorithms. This opens the door to consideration of explicit the door to consideration of explicit service response delays – a previously service response delays – a previously unstudied topic.unstudied topic.
CONTINUED