pdf beer dinamica 9e presentacion ppt c15
TRANSCRIPT

MECÁNICA VECTORIAL PARA INGENIEROS:
DINÁMICA
Novena edición
Ferdinand P. Beer
E. Russell Johnston, Jr.
Notas:
J. Walt Oler
Texas Tech University
CAPÍTULO
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
15 Cinemática de
cuerpos rígidos
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Contenido
15 - 2
Introducción
Traslación
Rotación alrededor de un eje fijo:
Velocidad
Rotación alrededor de un eje fijo:
Aceleración
Rotación alrededor de un eje fijo: Placa
representativa
Ecuaciones que definen la rotación de
un cuerpo rígido alrededor de un eje
fijo
Problema resuelto 15.1
Movimiento plano general
Velocidad absoluta y velocidad relativa
en el movimiento plano
Problema resuelto 15.2
Problema resuelto 15.3
Centro instantáneo de rotación en el
movimiento plano
Problema resuelto 15.4
Problema resuelto 15.5
Aceleraciones absoluta y relativa en el
movimiento plano
Análisis del movimiento plano en
términos de un parámetro
Problema resuelto 15.6
Problema resuelto 15.7
Problema resuelto 15.8
Razón de cambio con respecto a un
sistema de referencia en rotación
Aceleración de Coriolis
Problema resuelto 15.9
Problema resuelto 15.10
Movimiento alrededor de un punto fijo
Movimiento general
Problema resuelto 15.11
Movimiento tridimensional. Aceleración
de Coriolis
Sistema de referencia en movimiento
general
Problema resuelto 15.15

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Introducción
15 - 3
• Cinemática de cuerpos rígidos: relaciones
entre el tiempo y las posiciones, las
velocidades y las aceleraciones de las
partículas que forman un cuerpo rígido.
• Clasificación de los diferentes movimientos de
cuerpo rígido:
- movimiento general
- movimiento alrededor de un punto fijo
- movimiento plano general
- rotación alrededor de un eje fijo
• traslación curvilínea
• traslación rectilínea
- traslación:
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Traslación
15 - 4
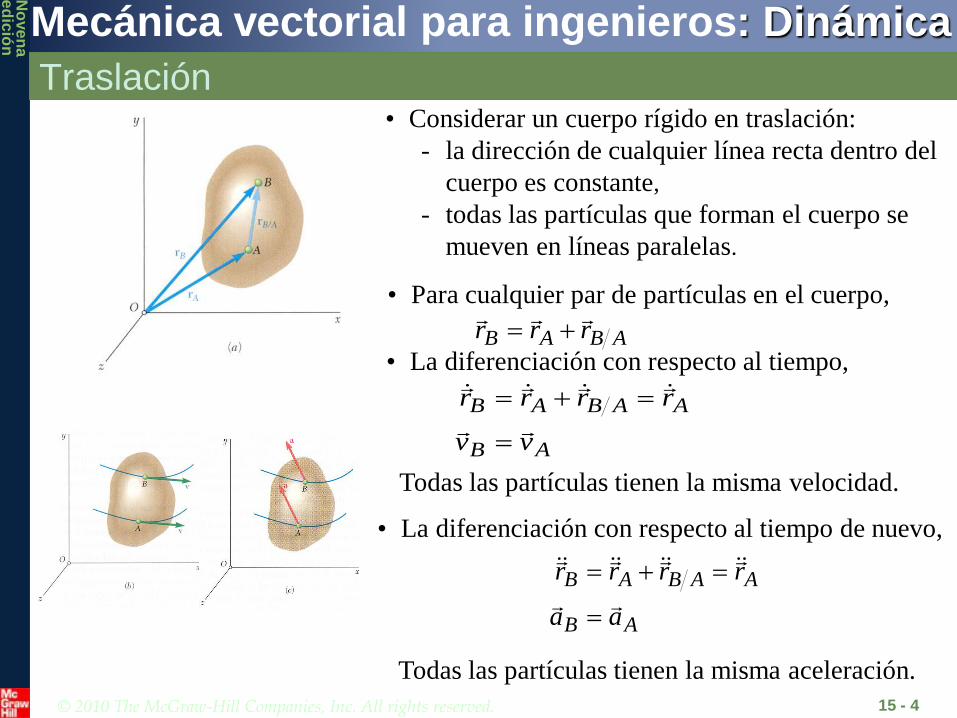
• Considerar un cuerpo rígido en traslación:
- la dirección de cualquier línea recta dentro del
cuerpo es constante,
- todas las partículas que forman el cuerpo se
mueven en líneas paralelas.
• Para cualquier par de partículas en el cuerpo,
ABAB rrr
• La diferenciación con respecto al tiempo,
AB
AABAB
vv
rrrr
Todas las partículas tienen la misma velocidad.
AB
AABAB
aa
rrrr
• La diferenciación con respecto al tiempo de nuevo,
Todas las partículas tienen la misma aceleración.
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Rotación alrededor de un eje fijo. Velocidad
15 - 5
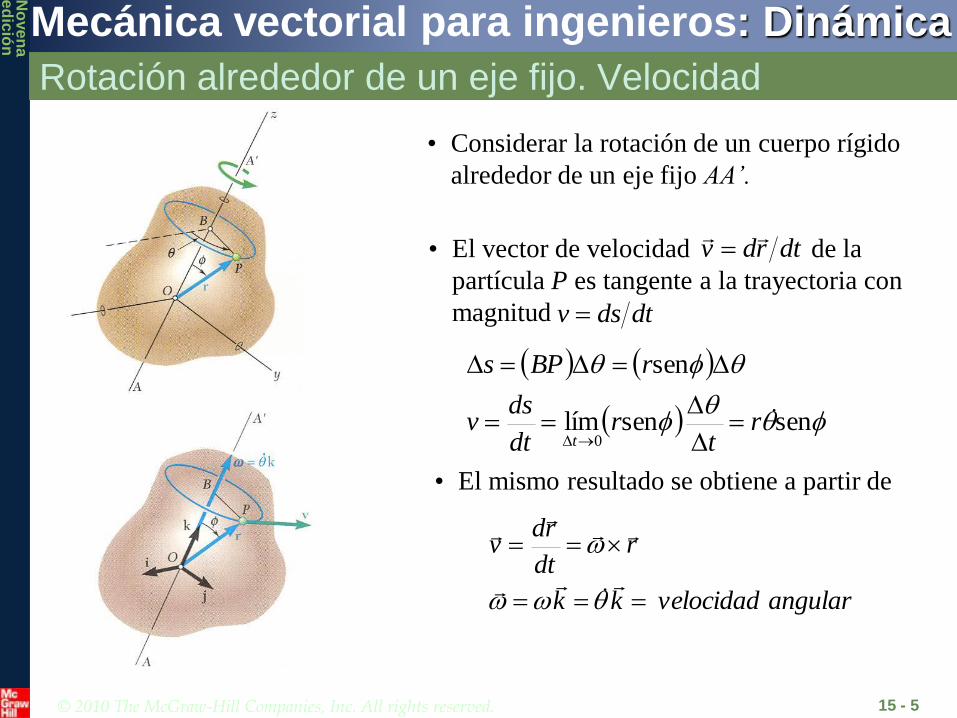
• Considerar la rotación de un cuerpo rígido
alrededor de un eje fijo AA’.
• El vector de velocidad de la
partícula P es tangente a la trayectoria con
magnitud
dtrdv
dtdsv
sensenlím
sen
0
rt
rdt
dsv
rBPs
t
ngular a velocidadkk
rdt
rdv
• El mismo resultado se obtiene a partir de
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Rotación alrededor de un eje fijo. Aceleración
15 - 6
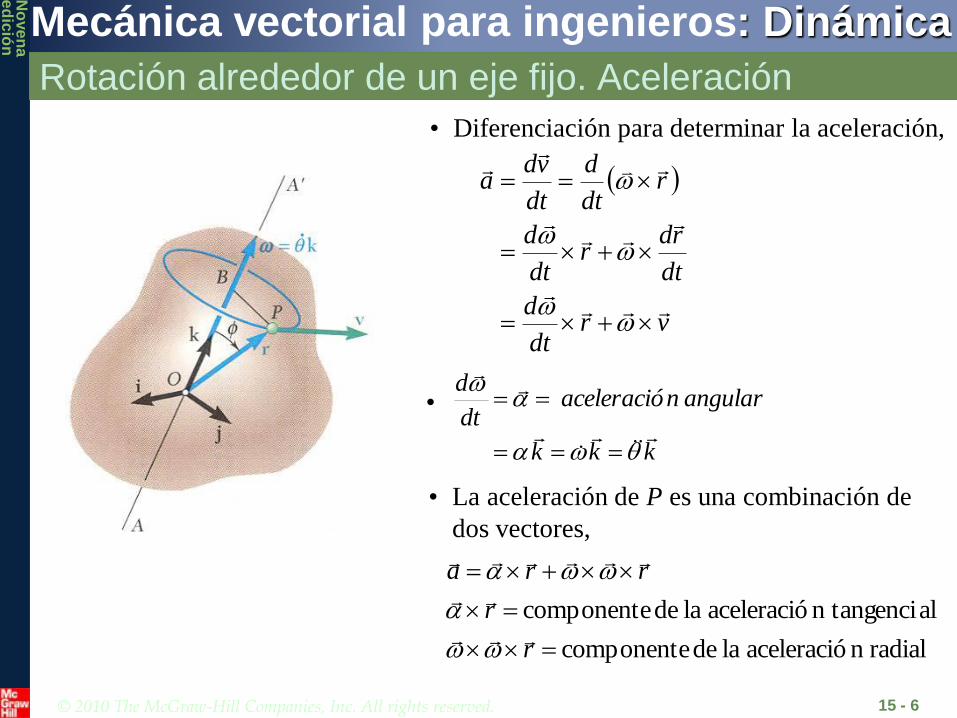
• Diferenciación para determinar la aceleración,
vrdt
d
dt
rdr
dt
d
rdt
d
dt
vda
•
kkk
ngular anaceleraciódt
d
radialn aceleració la de componente
aln tangenciaceleració la de componente
r
r
rra
• La aceleración de P es una combinación de
dos vectores,
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Rotación alrededor de un eje fijo. Placa representativa
15 - 7
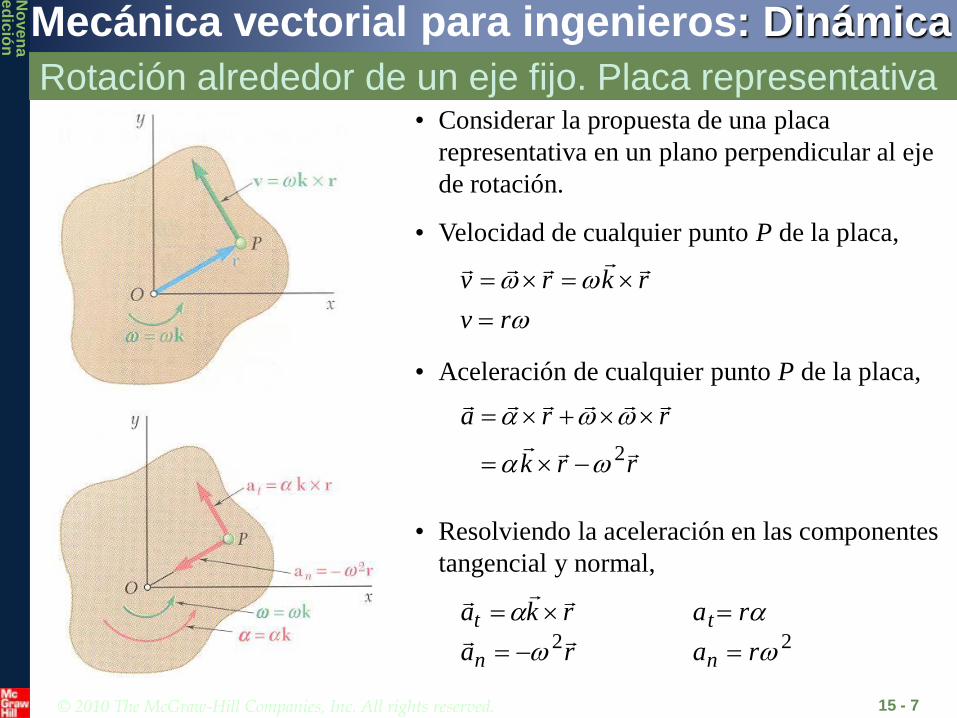
• Considerar la propuesta de una placa
representativa en un plano perpendicular al eje
de rotación.
• Velocidad de cualquier punto P de la placa,
rv
rkrv
• Aceleración de cualquier punto P de la placa,
rrk
rra
2
• Resolviendo la aceleración en las componentes
tangencial y normal,
22
rara
rarka
nn
tt

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Ecuaciones que definen la rotación de un cuerpo rígido alrededor de un eje
fijo
15 - 8
• El movimiento de un cuerpo rígido que gira
alrededor de un eje fijo a menudo es especificado
por el tipo de aceleración angular.
d
d
dt
d
dt
d
ddt
dt
d
2
2
o• Recordando
• Rotación uniforme, = 0:
t 0
• Rotación uniformemente acelerada, = constante:
020
2
221
00
0
2
tt
t

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.1
15 - 9
El cable C tiene una aceleración
constante de 9 in/s2 y una velocidad
inicial de 12 in/s, ambas dirigidas hacia
la derecha.
Determinar a) el número de
revoluciones ejecutadas por la polea en
2 s, b) la velocidad y el cambio en la
posición de la carga B después de 2 s, y
c) la aceleración del punto D sobre el
borde de la polea cuando t = 0.
SOLUCIÓN:
• Debido a la acción del cable, la
velocidad tangencial y la aceleración
de D son iguales a la velocidad y la
aceleración de C. Calcular la
velocidad angular inicial y la
aceleración.
• Aplicar las relaciones de la rotación
uniformemente acelerada para
determinar la velocidad y la posición
angular de la polea al cabo de 2 s.
• Evaluar los primeros componentes
tangencial y normal de la aceleración
de D.

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.1
15 - 10
SOLUCIÓN:
• La velocidad tangencial y la aceleración de D son
iguales a la velocidad y la aceleración de C.
srad4
3
12
sin.12
00
00
00
r
v
rv
vv
D
D
CD
2srad33
9
sin.9
r
a
ra
aa
tD
tD
CtD
• Aplicar las relaciones de la rotación uniformemente
acelerada para determinar la velocidad y la posición
angular de la polea al cabo de 2 s.
srad10s 2srad3srad4 20 t
rad 14
s 2srad3s 2srad422
212
21
0
tt
esrevolucion de númerorad 2
rev 1rad 14
N rev23.2N
rad 14in. 5
srad10in. 5
ry
rv
B
B
in. 70
sin.50
B
B
y
v

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 5.1
15 - 11
• Evaluar los primeros componentes tangencial y
normal de la aceleración de D.
sin.9CtD aa
2220 sin48srad4in. 3 DnD ra
22 sin.48sin.9 nDtD aa
Magnitud y dirección de la aceleración total,
22
22
489
nDtDD aaa
2sin.8.48Da
9
48
tan
tD
nD
a
a
4.79

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Movimiento plano general
15 - 12
• El movimiento plano general no es ni una
traslación ni una rotación.
• Un movimiento plano general puede considerarse
como la suma de una traslación y una rotación.
• El desplazamiento de las partículas A y B a A2 y
B2 se puede dividir en dos partes:
- traslación a A2 y
- rotación de alrededor de A2 a B2 1B1B
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Velocidad absoluta y velocidad relativa en el movimiento plano
15 - 13
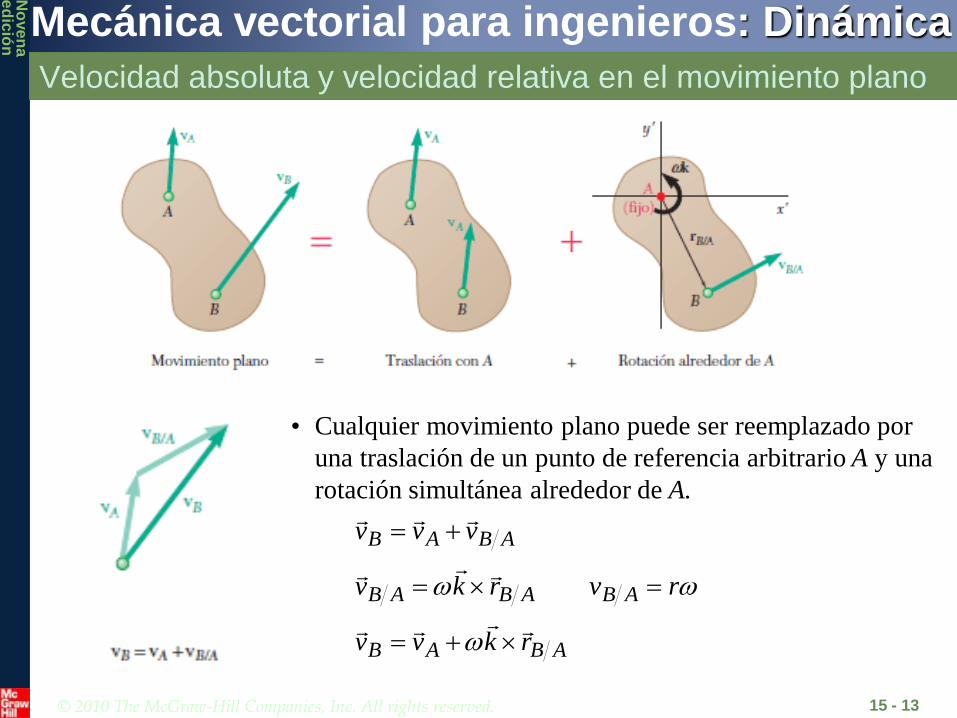
• Cualquier movimiento plano puede ser reemplazado por
una traslación de un punto de referencia arbitrario A y una
rotación simultánea alrededor de A.
ABAB vvv
rvrkv ABABAB
ABAB rkvv

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Velocidad absoluta y velocidad relativa en el movimiento plano
15 - 14
• Suponiendo que la velocidad vA del extremo A es conocida, se desea determinar la
velocidad vB del extremo B y la velocidad angular en términos de vA, l y .
• Las direcciones de vB y vB/A son conocidas. Complete el diagrama de velocidad.
tan
tan
AB
A
B
vv
v
v
cos
cos
l
v
l
v
v
v
A
A
AB
A
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Velocidad absoluta y velocidad relativa en el movimiento plano
15 - 15
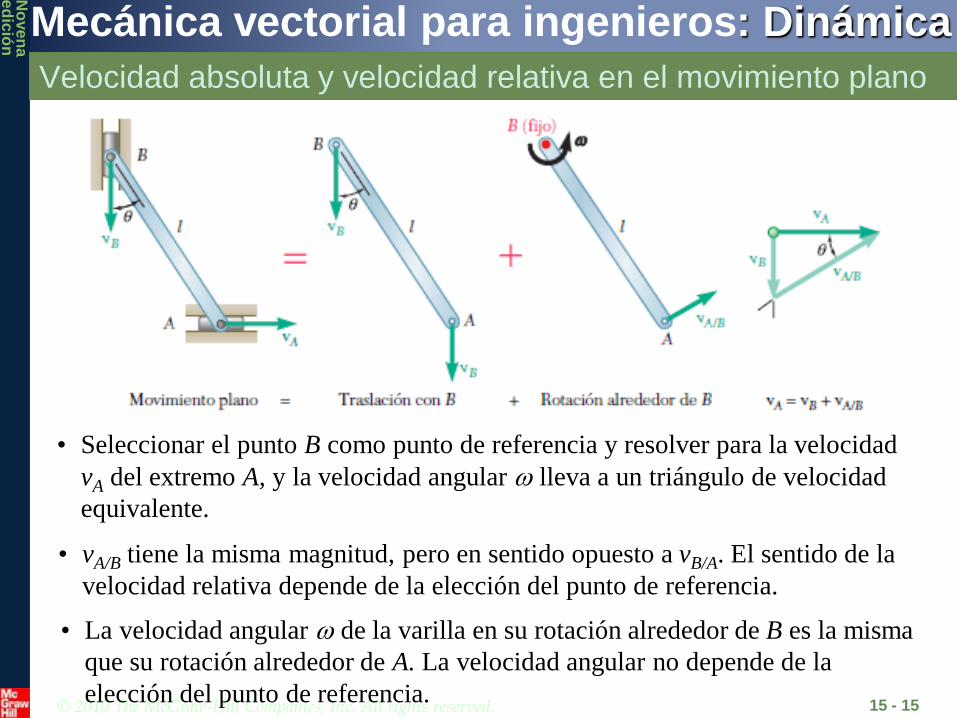
• Seleccionar el punto B como punto de referencia y resolver para la velocidad
vA del extremo A, y la velocidad angular lleva a un triángulo de velocidad
equivalente.
• vA/B tiene la misma magnitud, pero en sentido opuesto a vB/A. El sentido de la
velocidad relativa depende de la elección del punto de referencia.
• La velocidad angular de la varilla en su rotación alrededor de B es la misma
que su rotación alrededor de A. La velocidad angular no depende de la
elección del punto de referencia.
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.2
15 - 16
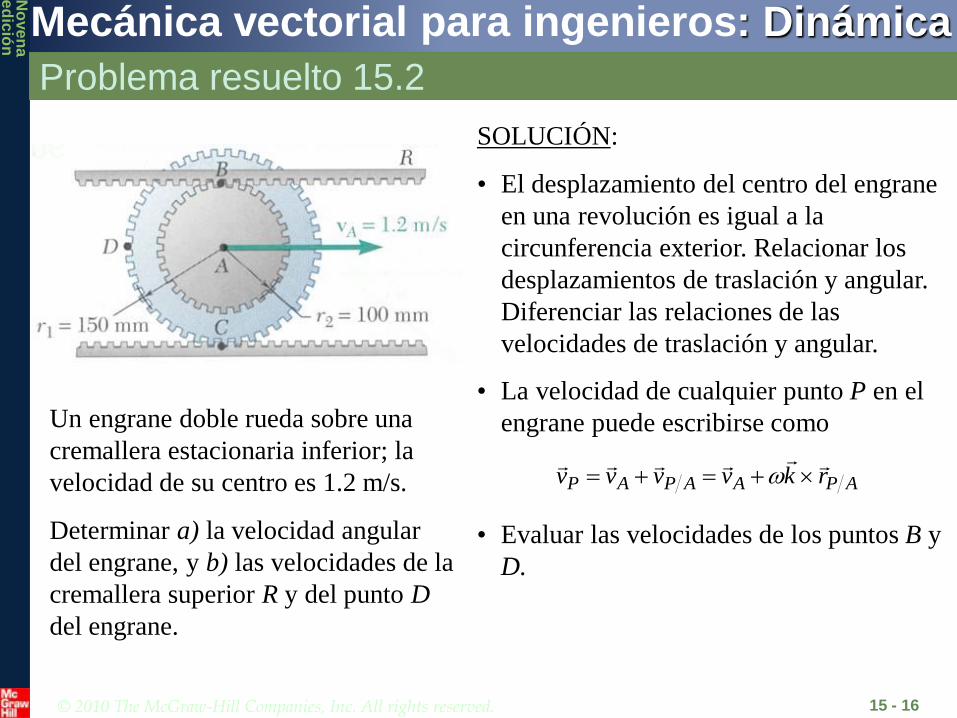
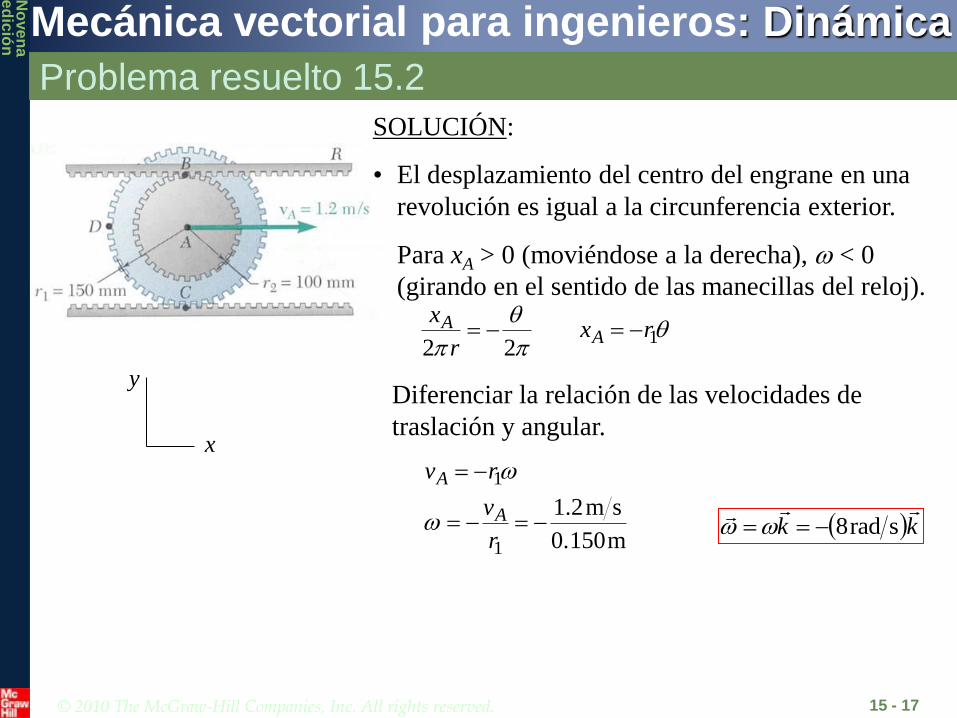
Un engrane doble rueda sobre una
cremallera estacionaria inferior; la
velocidad de su centro es 1.2 m/s.
Determinar a) la velocidad angular
del engrane, y b) las velocidades de la
cremallera superior R y del punto D
del engrane.
SOLUCIÓN:
• El desplazamiento del centro del engrane
en una revolución es igual a la
circunferencia exterior. Relacionar los
desplazamientos de traslación y angular.
Diferenciar las relaciones de las
velocidades de traslación y angular.
• La velocidad de cualquier punto P en el
engrane puede escribirse como
• Evaluar las velocidades de los puntos B y
D.
APAAPAP rkvvvv
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.2
15 - 17
x
y
SOLUCIÓN:
• El desplazamiento del centro del engrane en una
revolución es igual a la circunferencia exterior.
Para xA > 0 (moviéndose a la derecha), < 0
(girando en el sentido de las manecillas del reloj).
1
22rx
r
xA
A
Diferenciar la relación de las velocidades de
traslación y angular.
m0.150
sm2.1
1
1
r
v
rv
A
A
kk
srad8
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.2
15 - 18
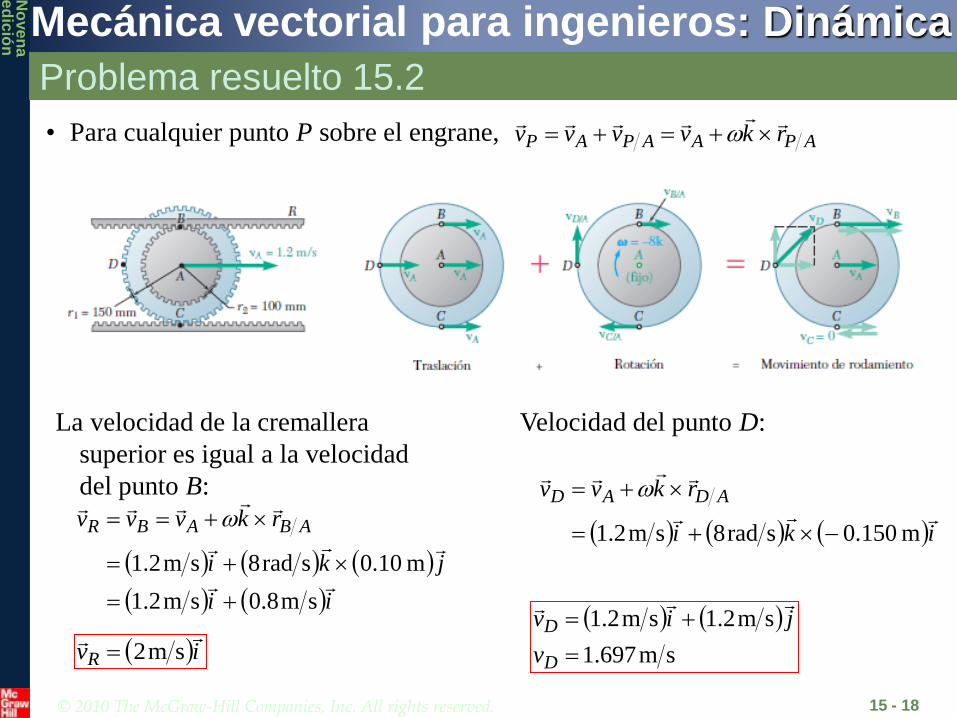
• Para cualquier punto P sobre el engrane, APAAPAP rkvvvv
La velocidad de la cremallera
superior es igual a la velocidad
del punto B:
ii
jki
rkvvv ABABR
sm8.0sm2.1
m 10.0srad8sm2.1
ivR
sm2
Velocidad del punto D:
iki
rkvv ADAD
m 150.0srad8sm2.1
sm697.1
sm2.1sm2.1
D
D
v
jiv

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.3
15 - 19
La manivela AB tiene una velocidad
angular constante en el sentido de las
manecillas del reloj de 2000 rpm.
Para la posición indicada de la
manivela, determine a) la velocidad
angular de la biela BD, y b) la
velocidad del pistón P.
SOLUCIÓN:
• Se determinará la velocidad absoluta del
punto D con
BDBD vvv
• La velocidad se obtiene de los datos
de la rotación de la manivela. Bv
• Las direcciones de la velocidad
absoluta y la velocidad relativa
se determinan a partir de la geometría
del problema.
Dv
BDv
• Las incógnitas en la expresión del vector
son las magnitudes de velocidad
que pueden ser determinadas a partir del
triángulo vectorial correspondiente.
BDD vv y
• La velocidad angular de la biela se
calcula a partir de .BDv

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.3
15 - 20
SOLUCIÓN:
• Se determinará la velocidad absoluta del punto D con
BDBD vvv
• La velocidad se obtiene de los datos de la rotación
de la manivela. Bv
srad 4.209in.3
srad 4.209rev
rad2
s60
min
min
rev2000
ABB
AB
ABv
La dirección de la velocidad es como se muestra.
• La dirección de la velocidad absoluta es
horizontal. La dirección de la velocidad relativa
es perpendicular a BD. Calcule el ángulo entre la
horizontal y la biela por la ley de los senos.
Dv
BDv
95.13in.3
sen
in.8
40sen
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.3
15 - 21
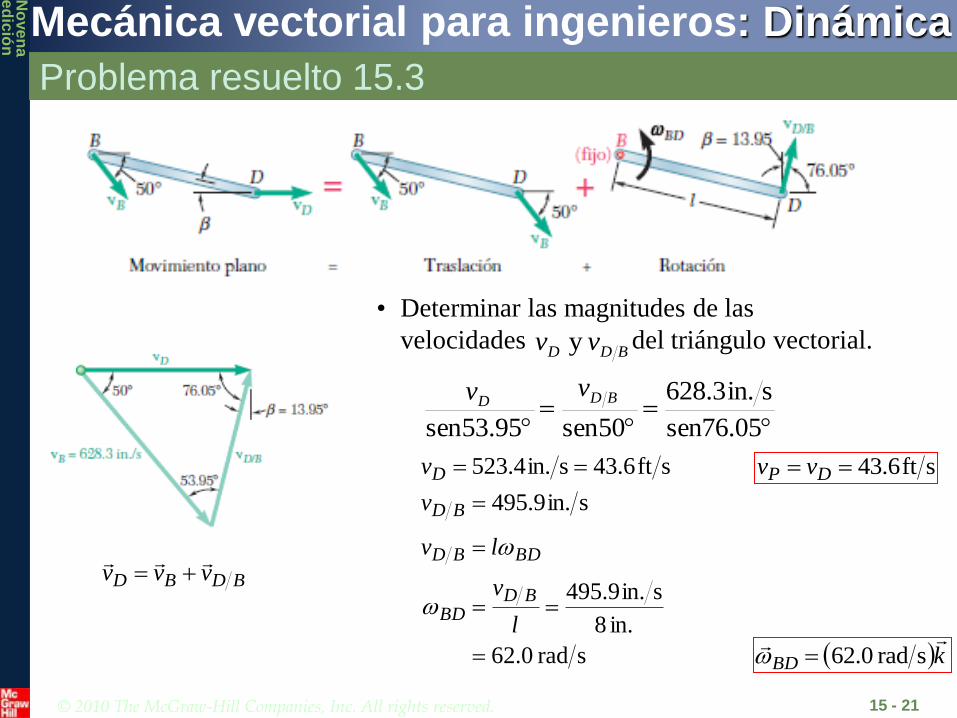
• Determinar las magnitudes de las
velocidades del triángulo vectorial. BDD vv y
BDBD vvv
sen76.05
sin.3.628
50sen95.53sen
BDDvv
sin.9.495
sft6.43sin.4.523
BD
D
v
v
srad 0.62
in. 8
sin.9.495
l
v
lv
BDBD
BDBD
sft6.43 DP vv
kBD
srad 0.62

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Centro instantáneo de rotación en el movimiento plano
15 - 22
• El movimiento plano de todas las partículas en una
placa siempre puede reemplazarse por la traslación de
un punto arbitrario A y una rotación alrededor de A con
una velocidad angular que es independiente de la
elección de A.
• Las mismas velocidades de traslación y rotación en A se
obtienen al permitir que la placa gire con la misma
velocidad angular respecto al punto C sobre una
perpendicular a la velocidad en A.
• La velocidad de todas las demás partículas en la placa es
la misma que se definió originalmente, puesto que la
velocidad angular y la velocidad de traslación en A son
equivalentes.
• En lo referente a las velocidades, la placa parece girar
alrededor del centro instantáneo de rotación C.
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Centro instantáneo de rotación en el movimiento plano
15 - 23
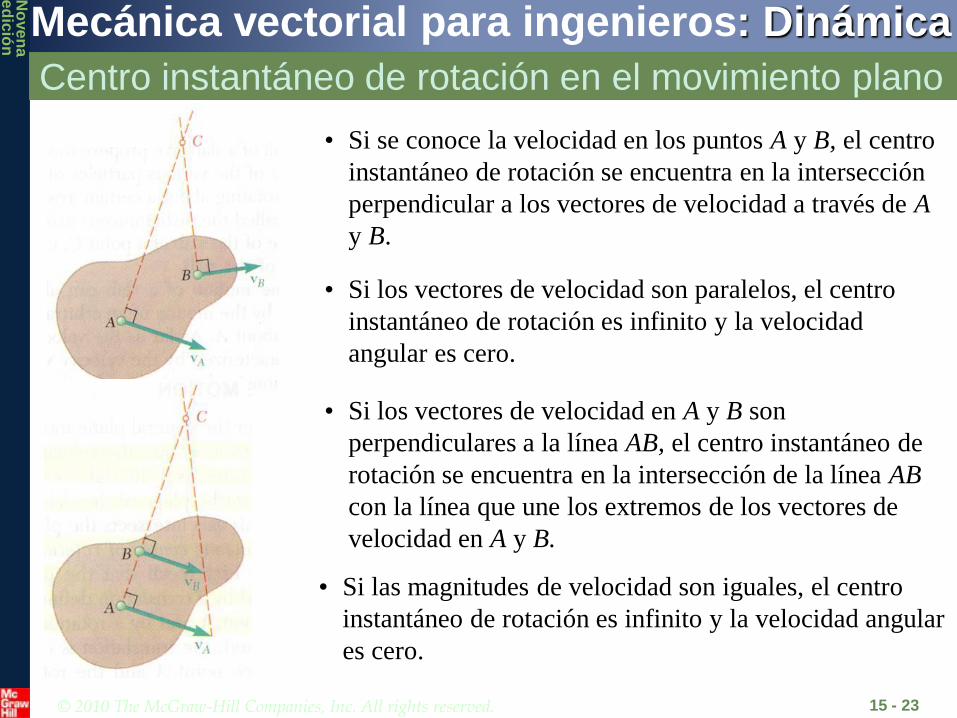
• Si se conoce la velocidad en los puntos A y B, el centro
instantáneo de rotación se encuentra en la intersección
perpendicular a los vectores de velocidad a través de A
y B.
• Si los vectores de velocidad en A y B son
perpendiculares a la línea AB, el centro instantáneo de
rotación se encuentra en la intersección de la línea AB
con la línea que une los extremos de los vectores de
velocidad en A y B.
• Si los vectores de velocidad son paralelos, el centro
instantáneo de rotación es infinito y la velocidad
angular es cero.
• Si las magnitudes de velocidad son iguales, el centro
instantáneo de rotación es infinito y la velocidad angular
es cero.
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Centro instantáneo de rotación en el movimiento plano
15 - 24
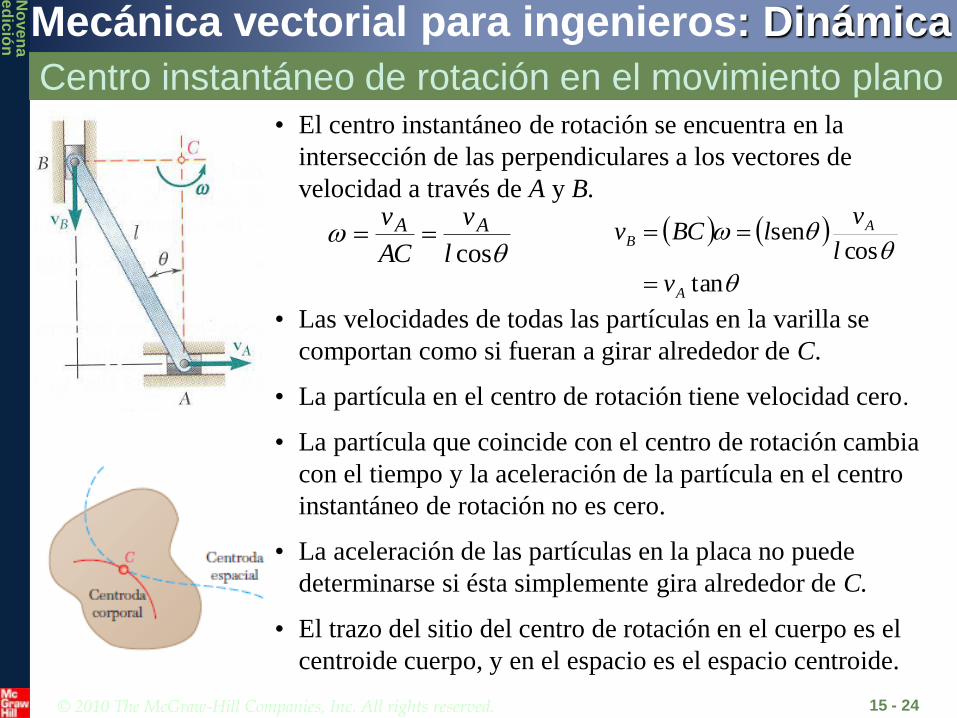
• El centro instantáneo de rotación se encuentra en la
intersección de las perpendiculares a los vectores de
velocidad a través de A y B.
cosl
v
AC
v AA
tan
cossen
A
AB
v
l
vlBCv
• Las velocidades de todas las partículas en la varilla se
comportan como si fueran a girar alrededor de C.
• La partícula en el centro de rotación tiene velocidad cero.
• La partícula que coincide con el centro de rotación cambia
con el tiempo y la aceleración de la partícula en el centro
instantáneo de rotación no es cero.
• La aceleración de las partículas en la placa no puede
determinarse si ésta simplemente gira alrededor de C.
• El trazo del sitio del centro de rotación en el cuerpo es el
centroide cuerpo, y en el espacio es el espacio centroide.
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.4
15 - 25
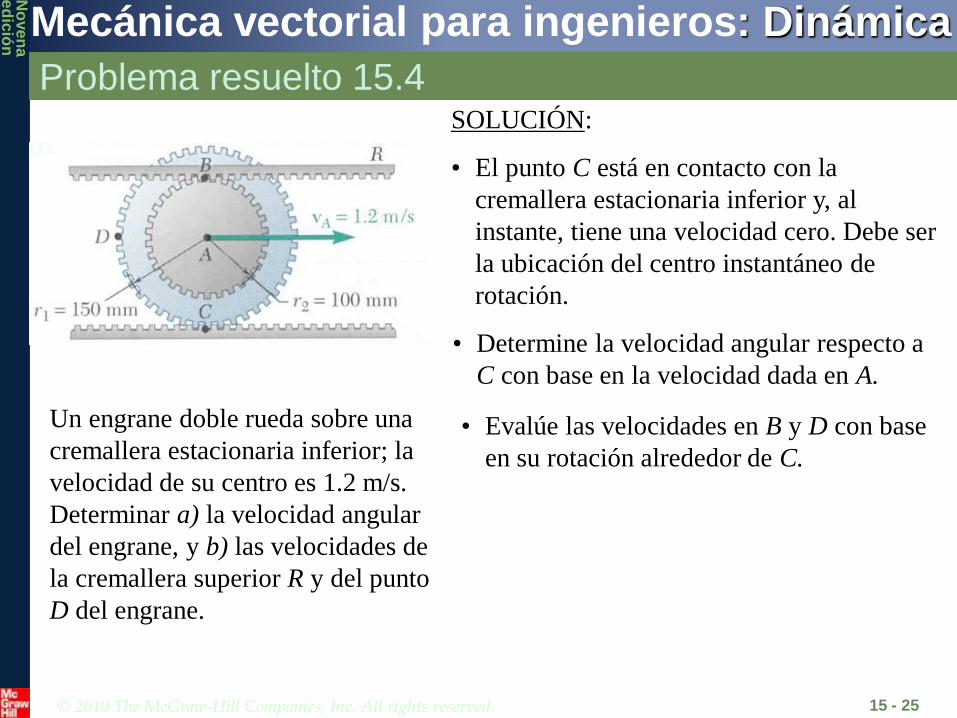
Un engrane doble rueda sobre una
cremallera estacionaria inferior; la
velocidad de su centro es 1.2 m/s.
Determinar a) la velocidad angular
del engrane, y b) las velocidades de
la cremallera superior R y del punto
D del engrane.
SOLUCIÓN:
• El punto C está en contacto con la
cremallera estacionaria inferior y, al
instante, tiene una velocidad cero. Debe ser
la ubicación del centro instantáneo de
rotación.
• Determine la velocidad angular respecto a
C con base en la velocidad dada en A.
• Evalúe las velocidades en B y D con base
en su rotación alrededor de C.

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.4
15 - 26
SOLUCIÓN:
• El punto C está en contacto con la cremallera
estacionaria inferior y, al instante, tiene una
velocidad cero. Debe ser la ubicación del centro
instantáneo de rotación.
• Determine la velocidad angular respecto a C con
base en la velocidad dada en A.
srad8m 0.15
sm2.1
A
AAA
r
vrv
• Evaluar las velocidades en B y D con base en su
rotación alrededor de C. srad8m 25.0 BBR rvv
ivR
sm2
srad8m 2121.0
m 2121.02m 15.0
DD
D
rv
r
sm2.12.1
sm697.1
jiv
v
D
D

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.5
15 - 27
La manivela AB tiene una velocidad
angular constante en el sentido de las
manecillas del reloj de 2000 rpm.
Para la posición indicada de la
manivela, determine a) la velocidad
angular de la biela BD, y b) la
velocidad del pistón P.
SOLUCIÓN:
• Determinar la velocidad en B de los
datos de la rotación de la manivela.
• La dirección de los vectores de
velocidad en B y D son conocidos. El
centro instantáneo de rotación está en la
intersección de las perpendiculares a las
velocidades a través de B y D.
• Determinar la velocidad angular
respecto al centro de rotación basado en
la velocidad en B.
• Calcular la velocidad en D con base en
su rotación alrededor del centro
instantáneo de rotación.

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.5
15 - 28
SOLUCIÓN:
• Del problema resuelto 15.3,
95.13
sin.3.628sin.3.4819.403
BB vjiv
• El centro instantáneo de rotación está en la
intersección de las perpendiculares a las
velocidades a través de B y D.
05.7690
95.5340
D
B
sen50
in. 8
95.53sen05.76sen
CDBC
in. 44.8in. 14.10 CDBC
• Determine la velocidad angular respecto al centro
de rotación basado en la velocidad en B.
in. 10.14
sin.3.628
BC
v
BCv
BBD
BDB
• Calcular la velocidad en D en función de su
rotación alrededor del centro instantáneo de
rotación.
srad0.62in. 44.8 BDD CDv
sft6.43sin.523 DP vv
srad0.62BD
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Aceleraciones absoluta y relativa en el movimiento plano
15 - 29
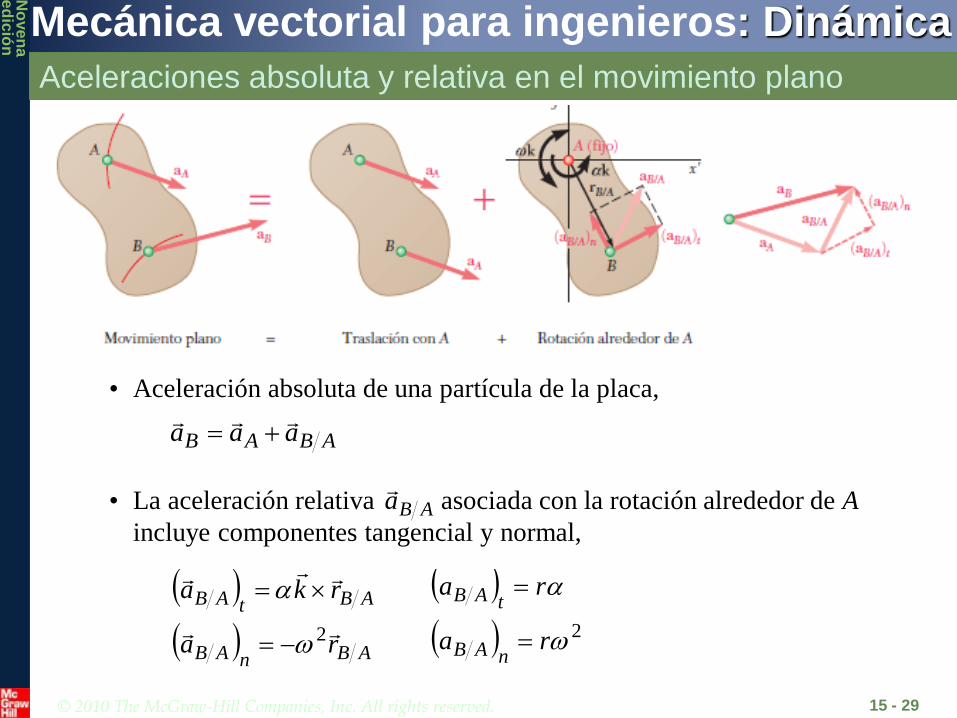
• Aceleración absoluta de una partícula de la placa,
ABAB aaa
• La aceleración relativa asociada con la rotación alrededor de A
incluye componentes tangencial y normal, ABa
ABnAB
ABtAB
ra
rka
2
2
ra
ra
nAB
tAB
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Aceleraciones absoluta y relativa en el movimiento plano
15 - 30
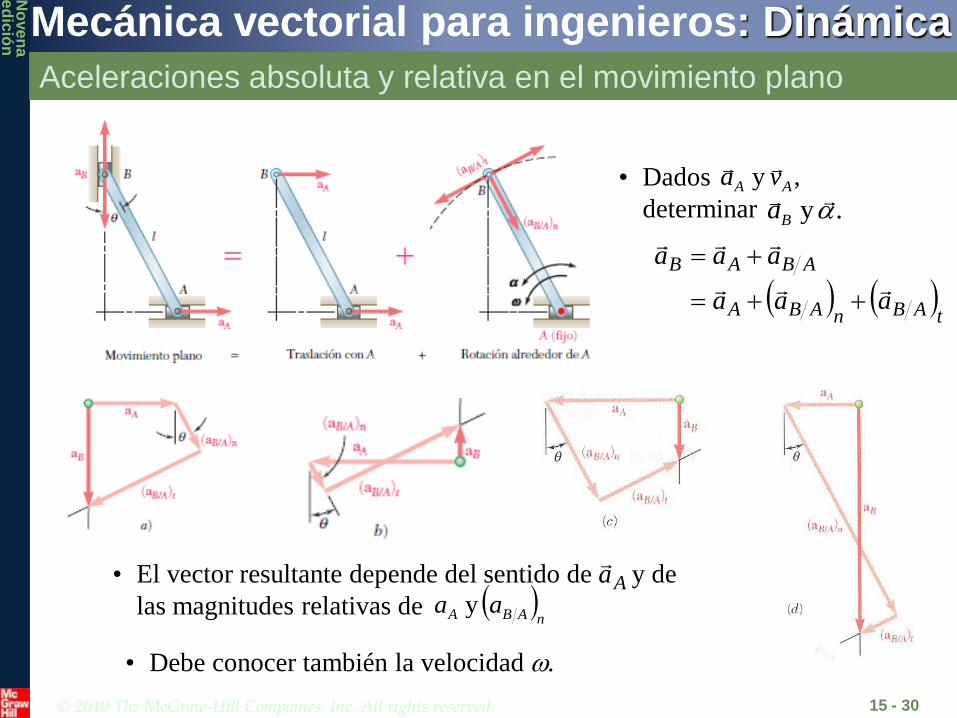
• Dados
determinar
,y AA va
.y
Ba
tABnABA
ABAB
aaa
aaa
• El vector resultante depende del sentido de y de
las magnitudes relativas de nABA aa y
Aa
• Debe conocer también la velocidad .

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Aceleraciones absoluta y relativa en el movimiento plano
15 - 31
componentes x: cossen0 2 llaA
componentes y: sencos2 llaB
• Resolver para aB y .
• Escribir en términos de las dos ecuaciones de componentes, ABAB aaa
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Análisis del movimiento plano en términos de un parámetro
15 - 32
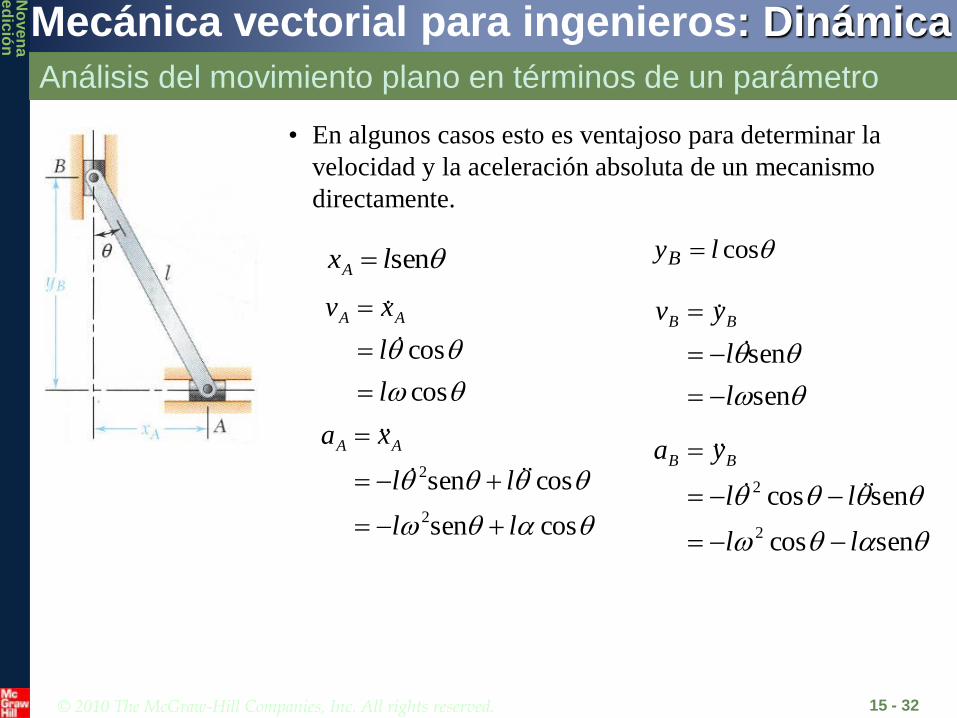
• En algunos casos esto es ventajoso para determinar la
velocidad y la aceleración absoluta de un mecanismo
directamente.
senlxA coslyB
cos
cos
l
l
xv AA
sen
sen
l
l
yv BB
cossen
cossen
2
2
ll
ll
xa AA
sencos
sencos
2
2
ll
ll
ya BB
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.6
15 - 33
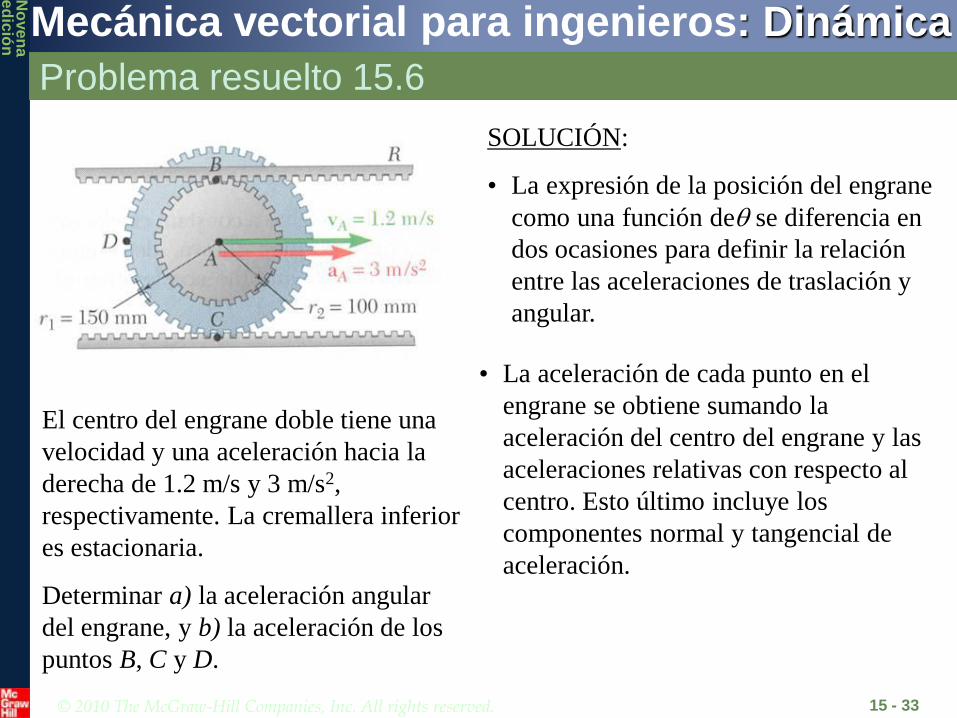
El centro del engrane doble tiene una
velocidad y una aceleración hacia la
derecha de 1.2 m/s y 3 m/s2,
respectivamente. La cremallera inferior
es estacionaria.
Determinar a) la aceleración angular
del engrane, y b) la aceleración de los
puntos B, C y D.
SOLUCIÓN:
• La expresión de la posición del engrane
como una función de se diferencia en
dos ocasiones para definir la relación
entre las aceleraciones de traslación y
angular.
• La aceleración de cada punto en el
engrane se obtiene sumando la
aceleración del centro del engrane y las
aceleraciones relativas con respecto al
centro. Esto último incluye los
componentes normal y tangencial de
aceleración.

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.6
15 - 34
SOLUCIÓN:
• La expresión de la posición del engrane como
una función de se diferencia en dos ocasiones
para definir la relación entre las aceleraciones de
traslación y angular.
11
1
rrv
rx
A
A
srad 8m 0.150
sm2.1
1
r
vA
11 rraA
m 150.0
sm3 2
1
r
aA
kk 2srad20
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.6
15 - 35
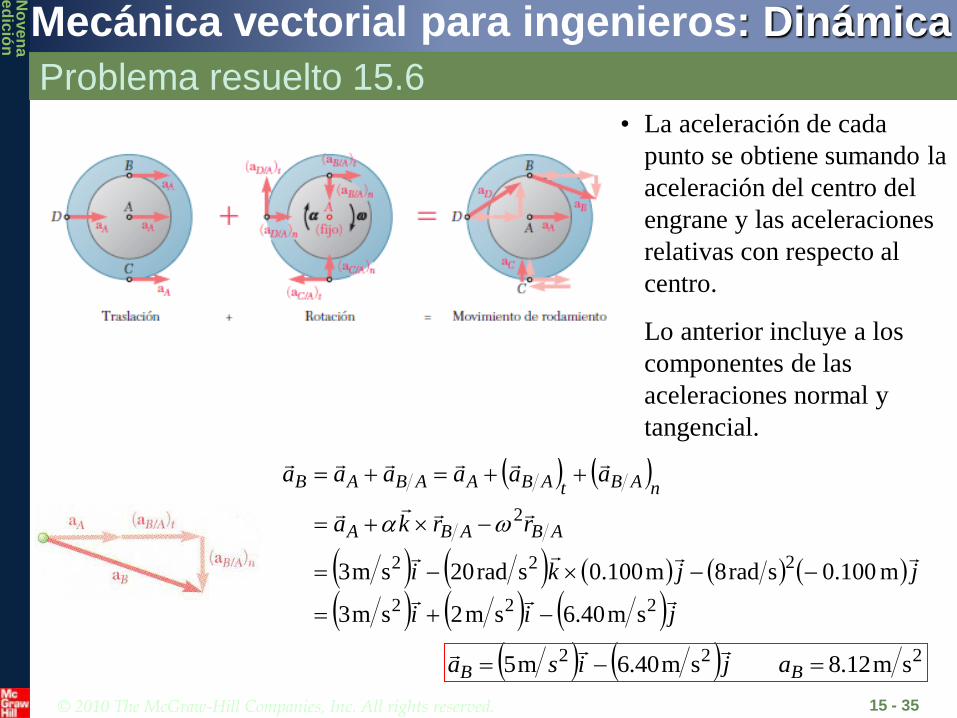
jii
jjki
rrka
aaaaaa
ABABA
nABtABAABAB
222
222
2
sm40.6sm2sm3
m100.0srad8m100.0srad20sm3
222 sm12.8sm40.6m5 BB ajisa
• La aceleración de cada
punto se obtiene sumando la
aceleración del centro del
engrane y las aceleraciones
relativas con respecto al
centro.
Lo anterior incluye a los
componentes de las
aceleraciones normal y
tangencial.

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.6
15 - 36
jii
jjki
rrkaaaa ACACAACAC
222
222
2
sm60.9sm3sm3
m150.0srad8m150.0srad20sm3
jac
2sm60.9
iji
iiki
rrkaaaa ADADAADAD
222
222
2
sm60.9sm3sm3
m150.0srad8m150.0srad20sm3
222 sm95.12sm3m6.12 DD ajisa
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
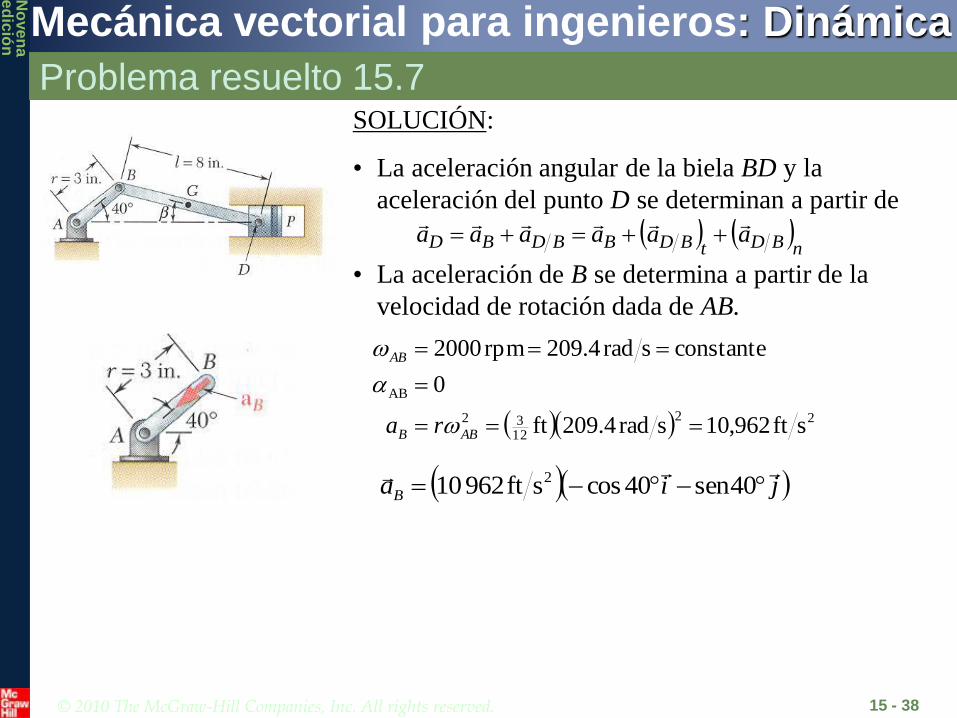
Problema resuelto 15.7
15 - 37
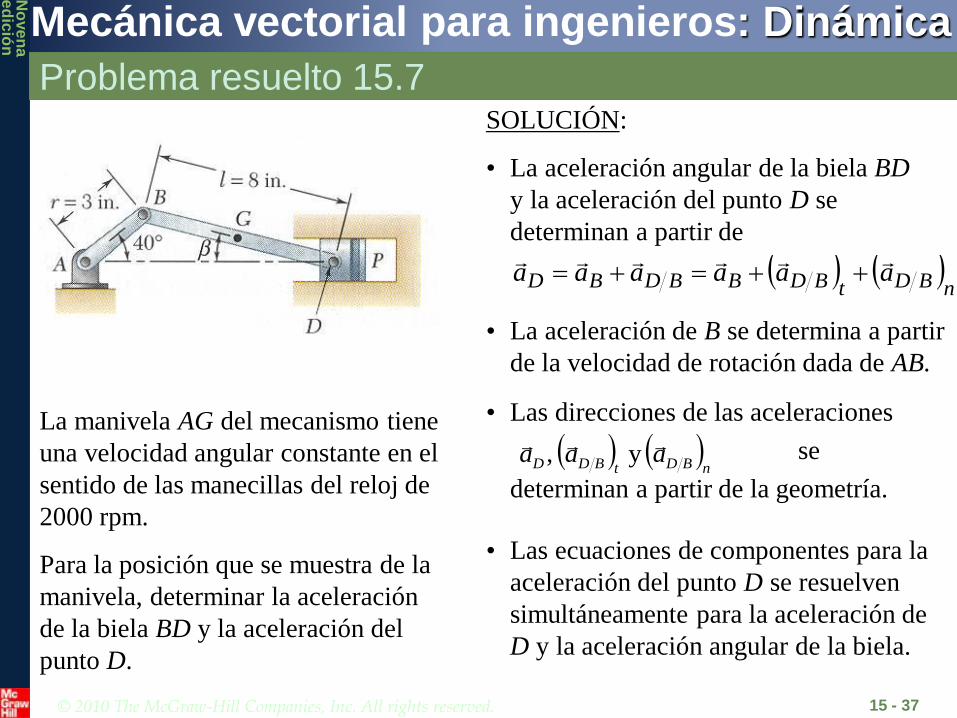
La manivela AG del mecanismo tiene
una velocidad angular constante en el
sentido de las manecillas del reloj de
2000 rpm.
Para la posición que se muestra de la
manivela, determinar la aceleración
de la biela BD y la aceleración del
punto D.
SOLUCIÓN:
• La aceleración angular de la biela BD
y la aceleración del punto D se
determinan a partir de
nBDtBDBBDBD aaaaaa
• La aceleración de B se determina a partir
de la velocidad de rotación dada de AB.
• Las direcciones de las aceleraciones
se
determinan a partir de la geometría.
nBDtBDD aaa
y ,
• Las ecuaciones de componentes para la
aceleración del punto D se resuelven
simultáneamente para la aceleración de
D y la aceleración angular de la biela.
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.7
15 - 38
• La aceleración de B se determina a partir de la
velocidad de rotación dada de AB.
SOLUCIÓN:
• La aceleración angular de la biela BD y la
aceleración del punto D se determinan a partir de
nBDtBDBBDBD aaaaaa
22
1232
AB
sft962,10srad4.209ft
0
constantesrad209.4rpm2000
ABB
AB
ra
jiaB
40sen40cossft962 10 2

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.7
15 - 39
• Las direcciones de las aceleraciones se
determinan a partir de la geometría.
nBDtBDD aaa
y ,
Del problema resuelto 15.3, BD = 62.0 rad/s, = 13.95o.
22
1282 sft2563srad0.62ft BDnBD BDa
jianBD
95.13sen95.13cossft2563 2
BDBDBDtBD BDa 667.0ft128
La dirección de (aD/B)t es conocida, pero el sentido no se
conoce,
jia BDtBD
05.76cos05.76sen667.0
iaa DD
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
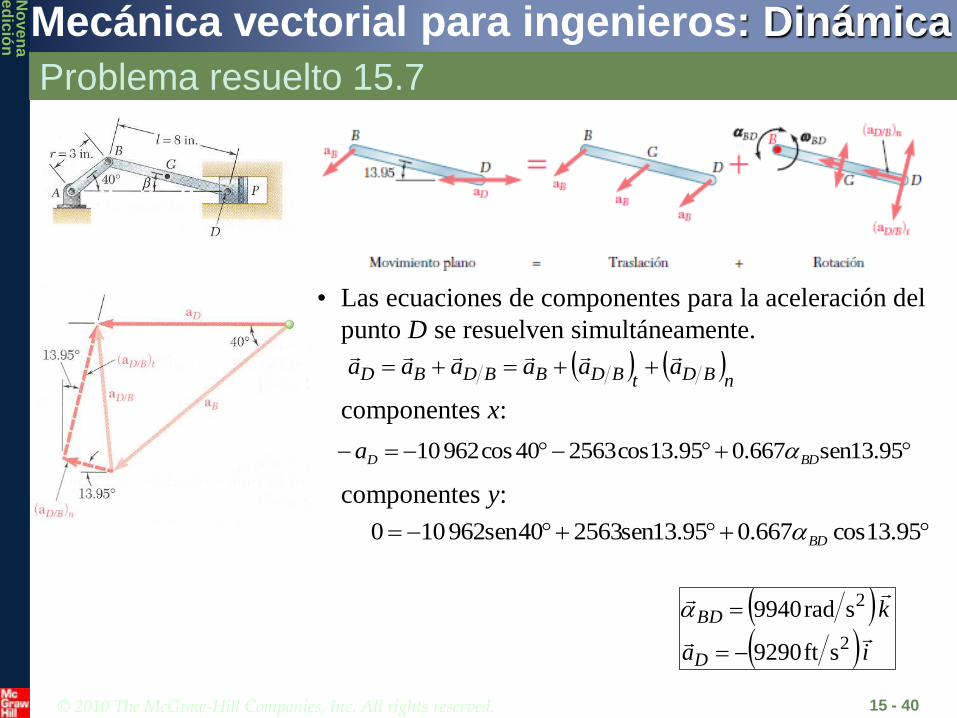
Problema resuelto 15.7
15 - 40
nBDtBDBBDBD aaaaaa
• Las ecuaciones de componentes para la aceleración del
punto D se resuelven simultáneamente.
componentes x:
95.13sen667.095.13cos256340cos962 10 BDDa
95.13cos667.095.13sen256340sen962 100 BD
componentes y:
ia
k
D
BD
2
2
sft9290
srad9940

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.8
15 - 41
En la posición mostrada, la manivela
AB tiene una velocidad angular
constante de 1 = 20 rad/s en sentido
contrario al de las manecillas del reloj.
Determinar las velocidades angulares y
las aceleraciones angulares de la barra
acopladora BD y de la manivela DE.
SOLUCIÓN:
• Las velocidades angulares son
determinadas resolviendo
simultáneamente las ecuaciones
componentes para
BDBD vvv
• Las aceleraciones angulares son
determinadas resolviendo
simultáneamente las ecuaciones
componentes para
BDBD aaa

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.8
15 - 42
SOLUCIÓN:
• Las velocidades angulares son determinadas resolviendo
simultáneamente las ecuaciones componentes para
BDBD vvv
ji
jikrv
DEDE
DEDDED
1717
1717
ji
jikrv BABB
160280
14820
ji
jikrv
BDBD
BDBDBDBD
123
312
BDDE 328017 componentes x:
BDDE 1216017 componentes y:
kk DEBD
srad29.11srad33.29
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
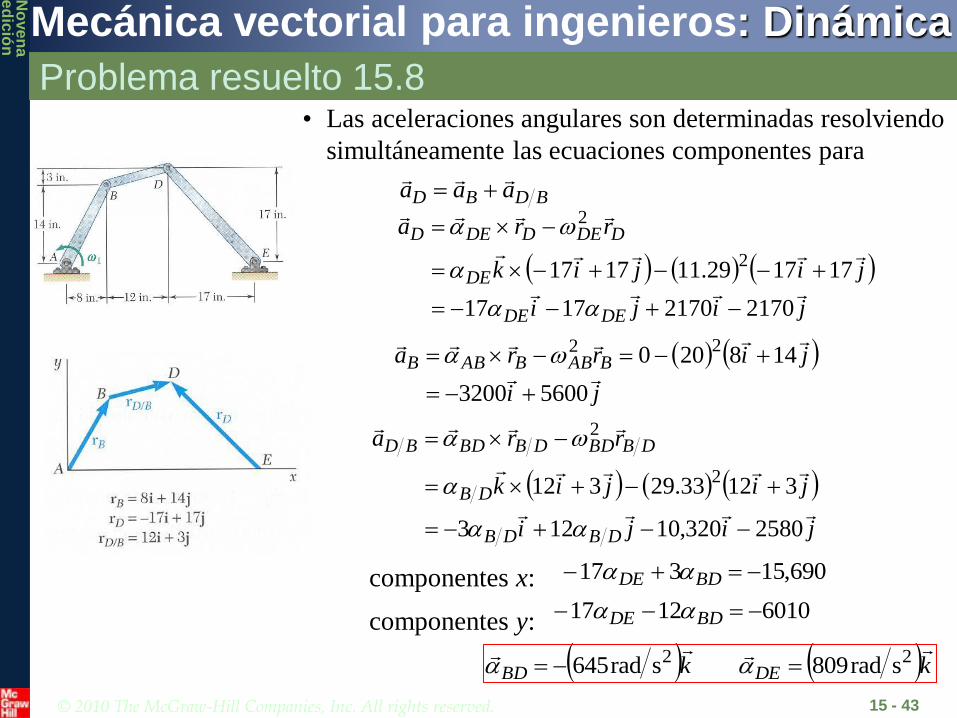
Problema resuelto 15.8
15 - 43
• Las aceleraciones angulares son determinadas resolviendo
simultáneamente las ecuaciones componentes para
BDBD aaa
jiji
jijik
rra
DEDE
DE
DDEDDED
217021701717
171729.1117172
2
ji
jirra BABBABB
56003200
14820022
jiji
jijik
rra
DBDB
DB
DBBDDBBDBD
2580320,10123
31233.293122
2
componentes x: 690,15317 BDDE
componentes y: 60101217 BDDE
kk DEBD
22 srad809srad645
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
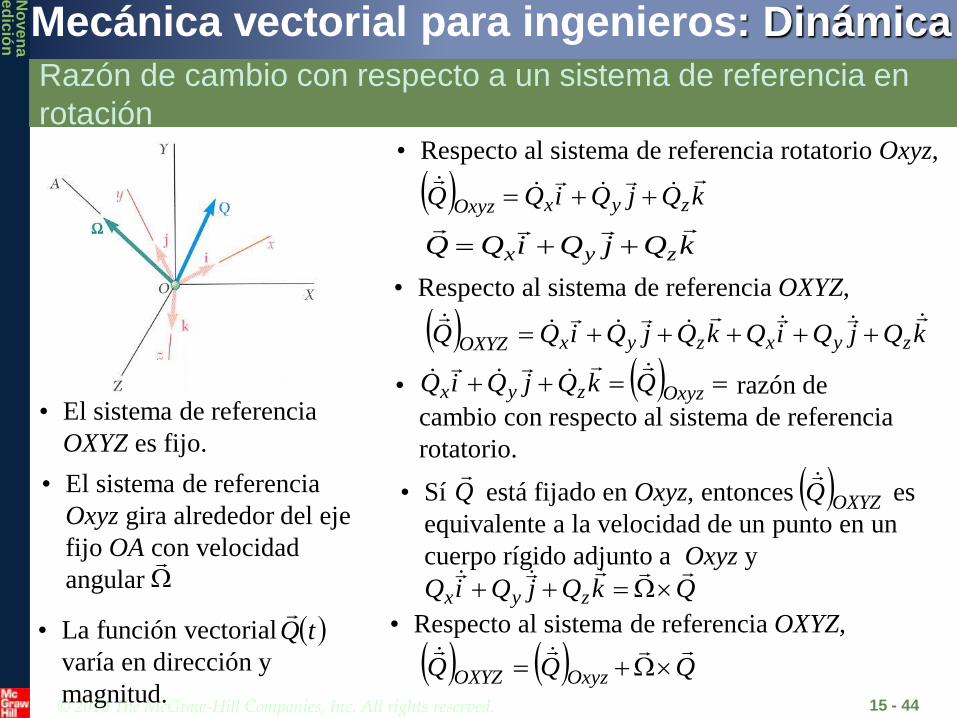
Razón de cambio con respecto a un sistema de referencia en
rotación
15 - 44
• El sistema de referencia
OXYZ es fijo.
• El sistema de referencia
Oxyz gira alrededor del eje
fijo OA con velocidad
angular
• La función vectorial
varía en dirección y
magnitud.
tQ
kQjQiQQ zyxOxyz
• Respecto al sistema de referencia OXYZ,
kQjQiQkQjQiQQ zyxzyxOXYZ
• razón de
cambio con respecto al sistema de referencia
rotatorio.
Oxyzzyx QkQjQiQ
• Sí está fijado en Oxyz, entonces es
equivalente a la velocidad de un punto en un
cuerpo rígido adjunto a Oxyz y
OXYZQ
QkQjQiQ zyx
Q
• Respecto al sistema de referencia rotatorio Oxyz,
kQjQiQQ zyx
• Respecto al sistema de referencia OXYZ,
QQQ OxyzOXYZ

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Aceleración de Coriolis
15 - 45
• El sistema de referencia OXY es fijo y el sistema de
referencia rotatorio Oxy gira con velocidad angular
.
• El vector de posición para la partícula P es el mismo
en ambos sistemas de referencia, pero la razón de
cambio depende de la elección del sistema de
referencia.
Pr
• La velocidad absoluta de la partícula P es
OxyOXYP rrrv
• Imagine una placa rígida junto al sistema de referencia
rotatorio Oxy, o F para abreviar. Sea P’ un punto sobre
la placa que corresponde de manera instantánea a la
posición de la partícula P.
OxyP rv F velocidad de P a lo largo de su
trayectoria en la placa
'Pv
velocidad absoluta del punto P’ sobre la placa
• La velocidad absoluta de la partícula P puede escribirse
como
FPPP vvv

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Aceleración de Coriolis
15 - 46
FPP
OxyP
vv
rrv
• La aceleración absoluta de la partícula P es
OxyOXYP rdt
drra
OxyOxyP rrrra
2
OxyOxyOxy
OxyOXY
rrrdt
d
rrr
pero
OxyP
P
ra
rra
F
• Utilizando el punto conceptual P’ sobre la placa,
• La aceleración absoluta para la partícula P se
convierte en
22
2
F
F
F
POxyc
cPP
OxyPPP
vra
aaa
raaa
aceleración de
Coriolis
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Aceleración de Coriolis
15 - 47
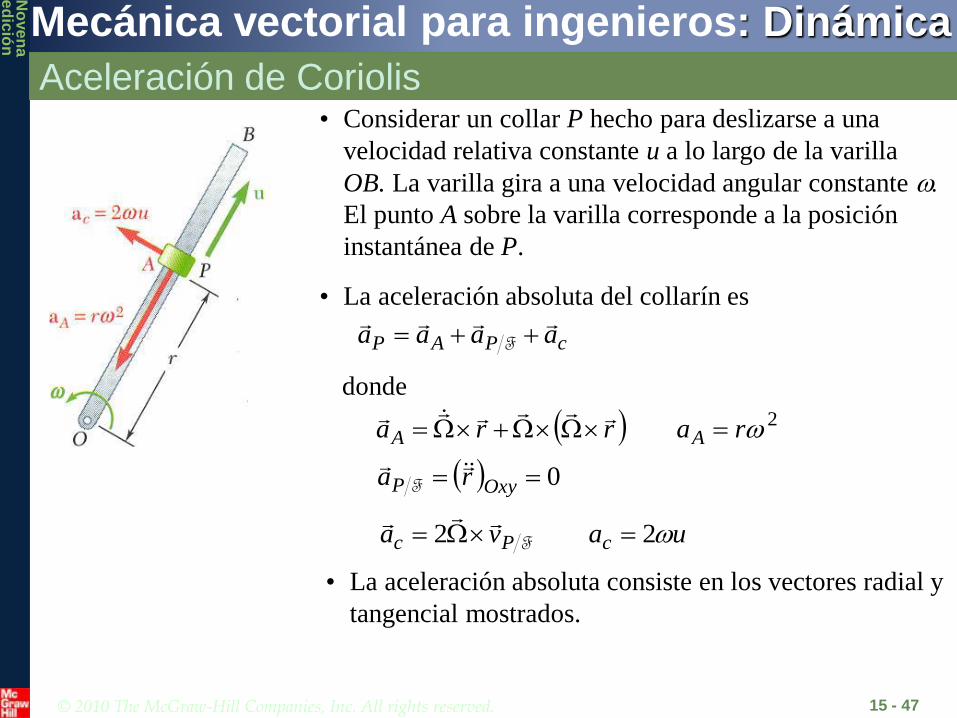
• Considerar un collar P hecho para deslizarse a una
velocidad relativa constante u a lo largo de la varilla
OB. La varilla gira a una velocidad angular constante .
El punto A sobre la varilla corresponde a la posición
instantánea de P.
cPAP aaaa
F
• La aceleración absoluta del collarín es
0 OxyP ra F
uava cPc 22 F
• La aceleración absoluta consiste en los vectores radial y
tangencial mostrados.
2rarra AA
donde
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Aceleración de Coriolis
15 - 48
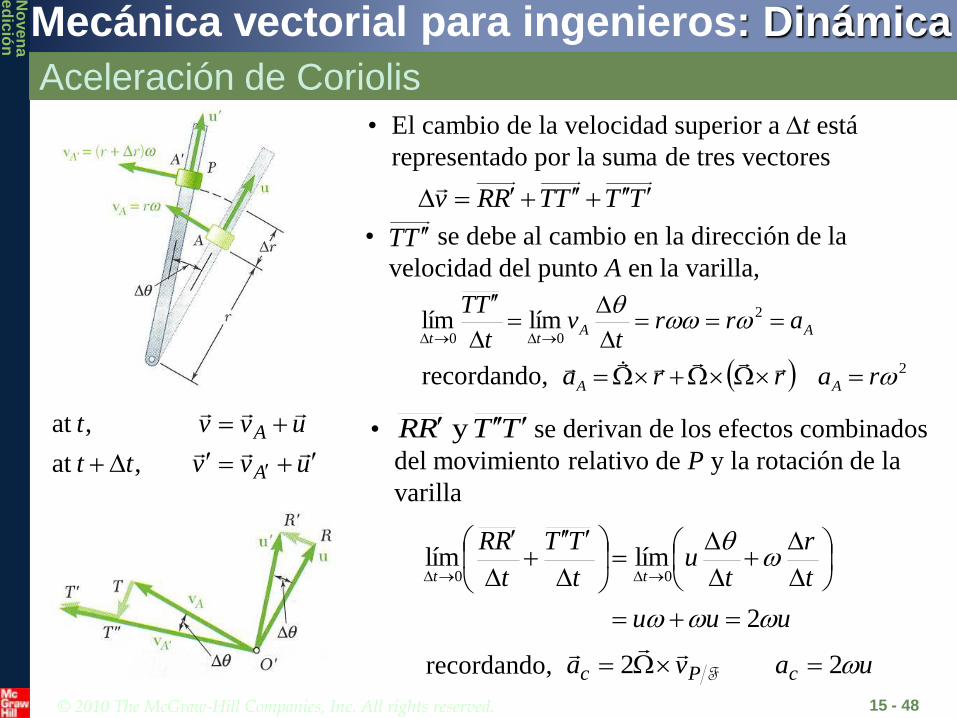
uvvtt
uvvt
A
A
,at
,at
• El cambio de la velocidad superior a t está
representado por la suma de tres vectores
TTTTRRv
2rarra AA
recordando,
• se debe al cambio en la dirección de la
velocidad del punto A en la varilla,
AAtt
arrt
vt
TT
2
00límlím
TT
• se derivan de los efectos combinados
del movimiento relativo de P y la rotación de la
varilla
TTRR y
uuu
t
r
tu
t
TT
t
RR
tt
2
límlím00
uava cPc 22 F
recordando,

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.9
15 - 49
El disco D del mecanismo de Ginebra
gira con una velocidad angular
constante de D = 10 rad/s en sentido
contrario al de las manecillas del reloj.
En el instante en que = 150o,
determinar a) la velocidad angular del
disco S, y b) la velocidad del pasador P
relativa al disco S.
SOLUCIÓN:
• La velocidad absoluta del punto P
puede escribirse como
sPPP vvv
• La magnitud y la dirección de la
velocidad de del pasador P se
calculan a partir de la velocidad angular
y del radio del disco D.
Pv
• La dirección de la velocidad del
punto P’ en donde S coincide con P es
perpendicular al radio OP.
Pv
• La dirección de la velocidad de P
con respecto a S es paralela a la ranura. sPv
• Resolver el triángulo vectorial de la
velocidad angular de S y velocidad
relativa de P.

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.9
15 - 50
SOLUCIÓN:
• La velocidad absoluta del punto P puede escribirse como
sPPP vvv
• La magnitud y la dirección de la velocidad absoluta del
pasador P se calculan a partir de la velocidad angular y del
radio del disco D.
smm500srad 10mm 50 DP Rv
• La dirección de la velocidad de P con respecto a S es
paralela a la ranura. De la ley de los cosenos,
mm 1.37551.030cos2 2222 rRRllRr
De la ley de los cosenos,
4.42742.0
30sensen
30sen
R
sen
r
6.17304.4290
El ángulo interior del triángulo vectorial es

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.9
15 - 51
• La dirección de la velocidad del punto P’ en donde S
coincide con P es perpendicular al radio OP. De la velocidad
triangular,
mm 1.37
smm2.151
smm2.1516.17sensmm500sen
ss
PP
r
vv
ks
srad08.4
6.17cossm500cosPsP vv
jiv sP
4.42sin4.42cossm477
smm 500Pv

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.10
15 - 52
En el mecanismo de Ginebra, el
disco D gira con una velocidad
angular constante de 10 rad/s en
sentido contrario al de las
manecillas del reloj. En el instante
en que j = 150o, determinar la
aceleración angular del disco S.
SOLUCIÓN:
• La aceleración absoluta del pasador P puede
expresarse como
csPPP aaaa
• La velocidad angular instantánea del disco S
se determinó como en el problema resuelto
15.9.
• La única incógnita involucrada en la
ecuación de la aceleración es la aceleración
angular instantánea del disco S.
• Resolver cada término de aceleración en la
componente paralela a la ranura.
Determinar la aceleración angular del disco
S.
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.10
15 - 53
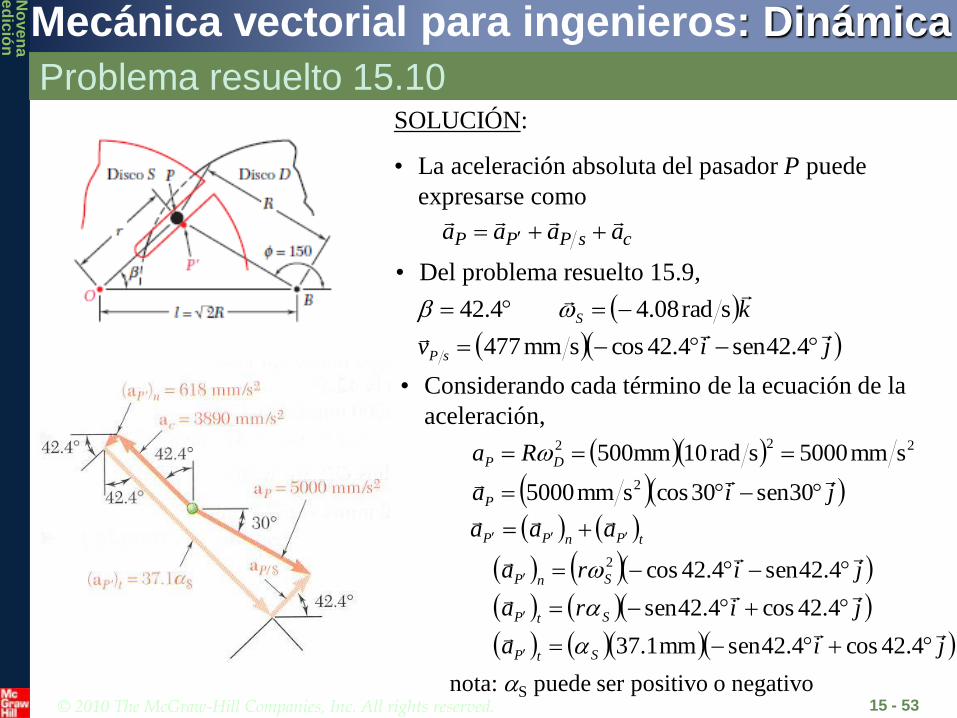
SOLUCIÓN:
• La aceleración absoluta del pasador P puede
expresarse como
csPPP aaaa
• Del problema resuelto 15.9,
jiv
k
sP
S
4.42sen4.42cossmm477
srad08.44.42
• Considerando cada término de la ecuación de la
aceleración,
jia
Ra
P
DP
30sen30cossmm5000
smm5000srad10mm500
2
222
jia
jira
jira
aaa
StP
StP
SnP
tPnPP
4.42cos4.42senmm1.37
4.42cos4.42sen
4.42sen4.42cos2
nota: S puede ser positivo o negativo

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.10
15 - 54
• La aceleración relativa debe ser paralela a la
ranura. sPa
sPv
• La dirección de la aceleración de Coriolis se obtiene
girando la dirección de la velocidad relativa de
90° en el sentido S.
ji
ji
jiva sPSc
4.42cos4.42sensmm3890
4.42cos4.42sensmm477srad08.42
4.42cos4.42sen2
2
• Equiparando los componentes de los términos de
aceleración perpendicular a la ranura,
srad233
07.17cos500038901.37
S
S
kS
srad233
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Movimiento alrededor de un punto fijo
15 - 55
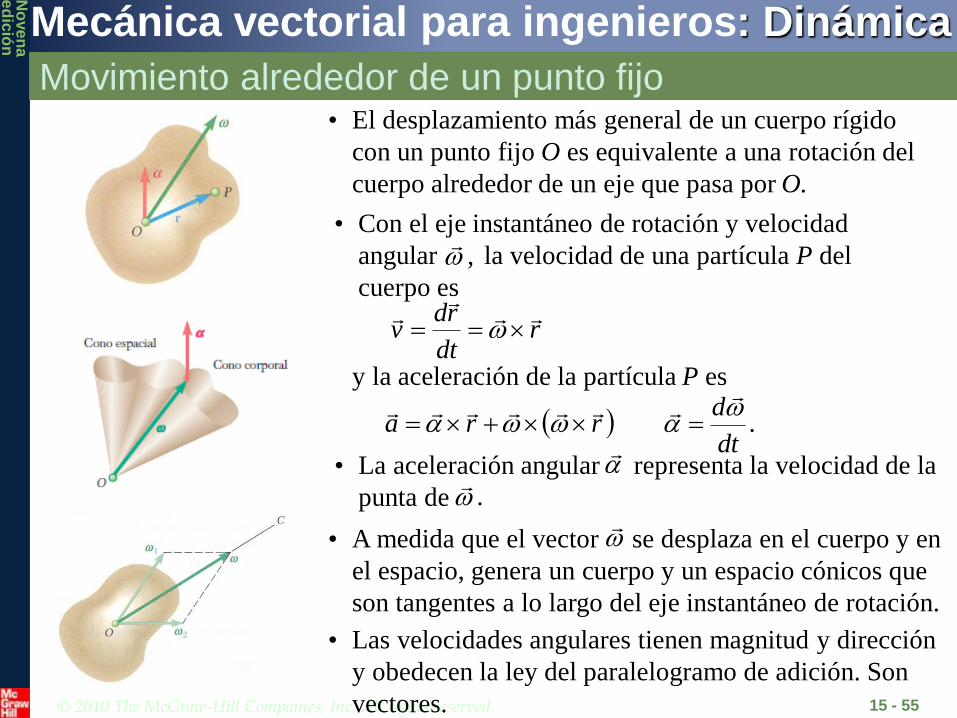
• El desplazamiento más general de un cuerpo rígido
con un punto fijo O es equivalente a una rotación del
cuerpo alrededor de un eje que pasa por O.
• Con el eje instantáneo de rotación y velocidad
angular la velocidad de una partícula P del
cuerpo es
,
rdt
rdv
y la aceleración de la partícula P es
.dt
drra
• Las velocidades angulares tienen magnitud y dirección
y obedecen la ley del paralelogramo de adición. Son
vectores.
• A medida que el vector se desplaza en el cuerpo y en
el espacio, genera un cuerpo y un espacio cónicos que
son tangentes a lo largo del eje instantáneo de rotación.
• La aceleración angular representa la velocidad de la
punta de .
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Movimiento general
15 - 56
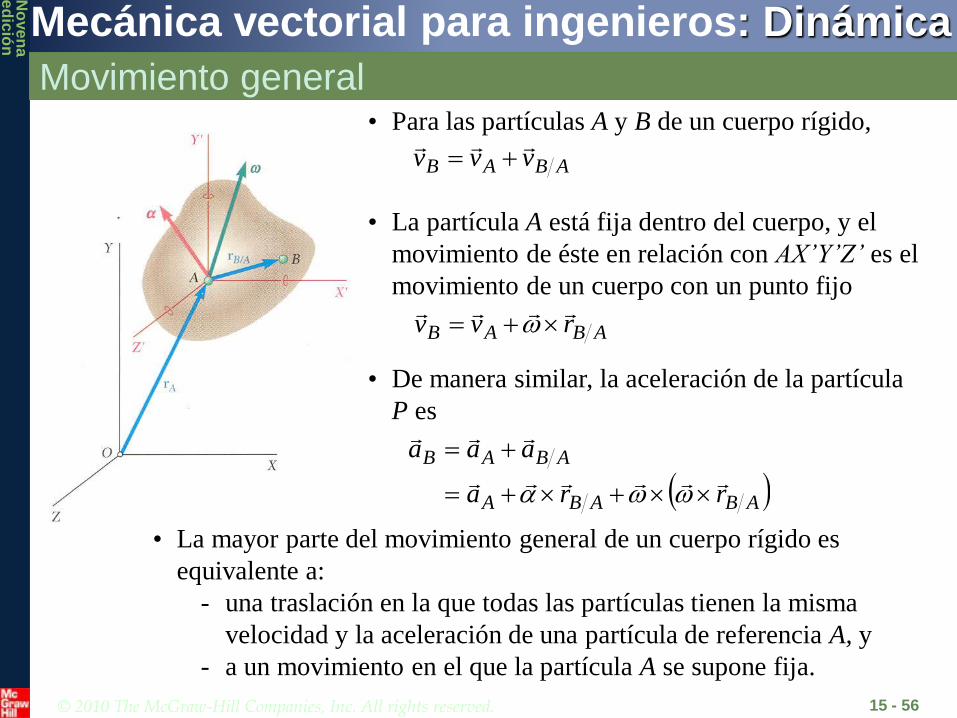
• Para las partículas A y B de un cuerpo rígido,
ABAB vvv
• La partícula A está fija dentro del cuerpo, y el
movimiento de éste en relación con AX’Y’Z’ es el
movimiento de un cuerpo con un punto fijo
ABAB rvv
• De manera similar, la aceleración de la partícula
P es
ABABA
ABAB
rra
aaa
• La mayor parte del movimiento general de un cuerpo rígido es
equivalente a:
- una traslación en la que todas las partículas tienen la misma
velocidad y la aceleración de una partícula de referencia A, y
- a un movimiento en el que la partícula A se supone fija.
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.11
15 - 57
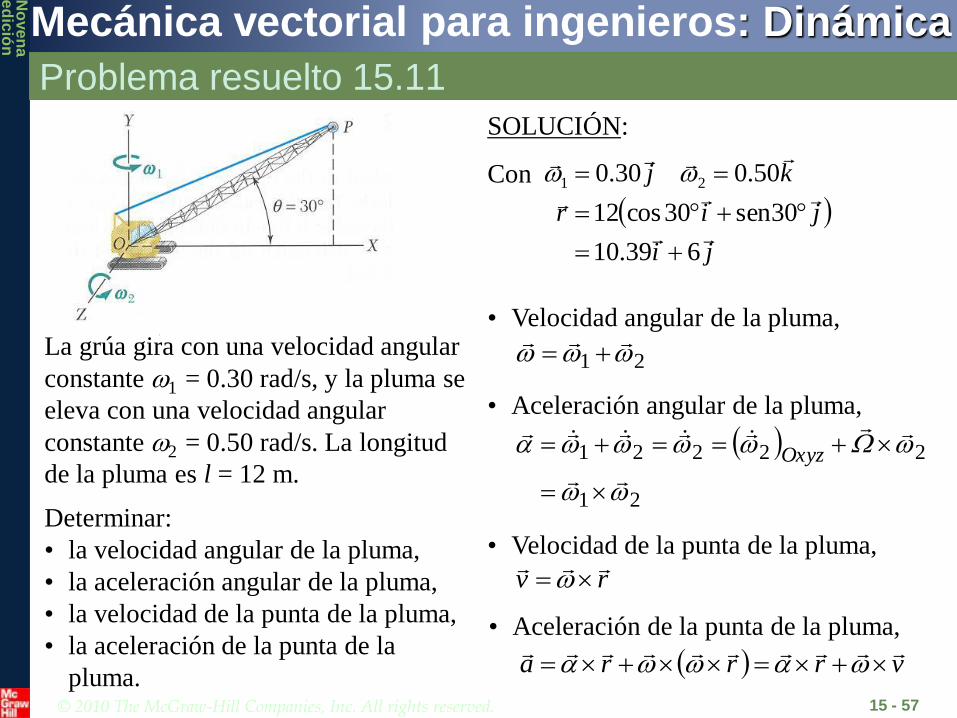
La grúa gira con una velocidad angular
constante 1 = 0.30 rad/s, y la pluma se
eleva con una velocidad angular
constante 2 = 0.50 rad/s. La longitud
de la pluma es l = 12 m.
Determinar:
• la velocidad angular de la pluma,
• la aceleración angular de la pluma,
• la velocidad de la punta de la pluma,
• la aceleración de la punta de la
pluma.
• Aceleración angular de la pluma,
21
22221
Oxyz
• Velocidad de la punta de la pluma,
rv
• Aceleración de la punta de la pluma,
vrrra
SOLUCIÓN:
Con
• Velocidad angular de la pluma,
21
ji
jir
kj
639.10
30sen30cos12
50.030.0 21

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.11
15 - 58
jir
kj
639.10
50.030.0 21
SOLUCIÓN:
• Velocidad angular de la pluma,
21
kj
srad50.0srad30.0
• Aceleración angular de la pluma,
kj
Oxyz
srad50.0srad30.021
22221
i 2srad15.0
• Velocidad de la punta de la pluma,
0639.10
5.03.00
kji
rv
kjiv
sm12.3sm20.5sm54.3
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.11
15 - 59
jir
kj
639.10
50.030.0 21
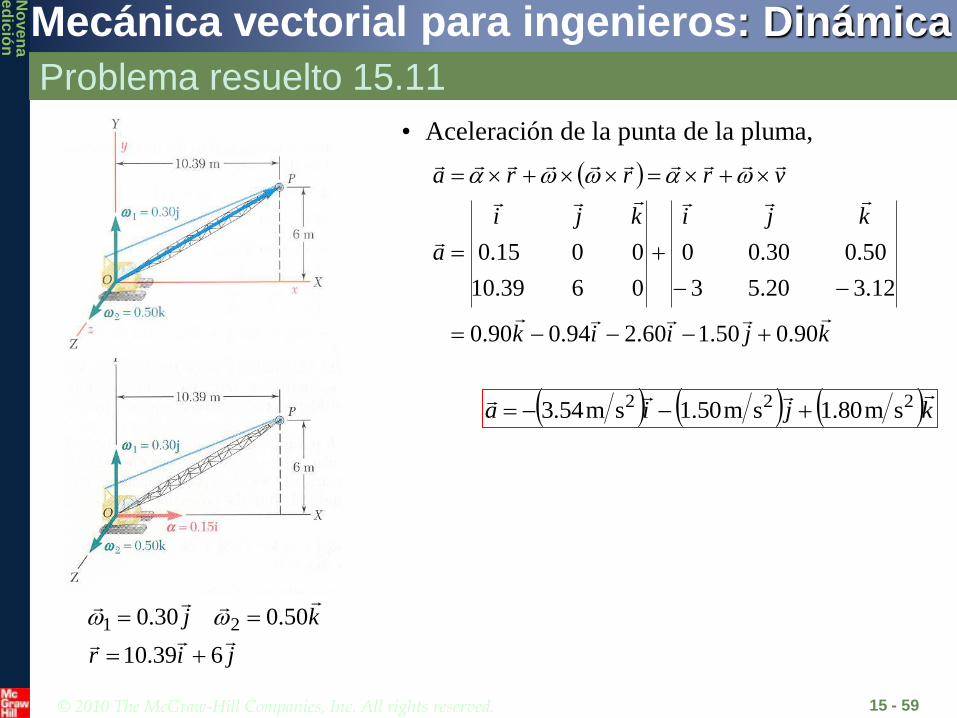
• Aceleración de la punta de la pluma,
kjiik
kjikji
a
vrrra
90.050.160.294.090.0
12.320.53
50.030.00
0639.10
0015.0
kjia 222 sm80.1sm50.1sm54.3

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Movimiento tridimensional. Aceleración de Coriolis
15 - 60
• Con respecto al sistema de referencia fijo OXYZ y al
sistema de referencia rotatorio Oxyz,
QQQ OxyzOXYZ
• Considérese el movimiento de la partícula P respecto
a un sistema de referencia rotatorio Oxyz, o F para
abreviar. La velocidad absoluta puede expresarse
como
FPP
OxyzP
vv
rrv
• La aceleración absoluta puede expresarse como
Coriolis den aceleració 22
2
F
F
POxyzc
cPp
OxyzOxyzP
vra
aaa
rrrra

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Sistema de referencia en movimiento general
15 - 61
Considérese:
- el sistema de referencia fijo OXYZ,
- el sistema de referencia de
traslación AX’Y’Z’, y
- el sistema de referencia de
traslación y rotación Axyz, o F.
• Con respecto a OXYZ y AX’Y’Z’,
APAP
APAP
APAP
aaa
vvv
rrr
• La velocidad y la aceleración de P respecto a
AX’Y’Z’ puede encontrarse en función de la
velocidad, y la aceleración de P respecto a
Axyz.
FPP
AxyzAPAPAP
vv
rrvv
cPP
AxyzAPAxyzAP
APAPAP
aaa
rr
rraa
F
2
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.15
15 - 62
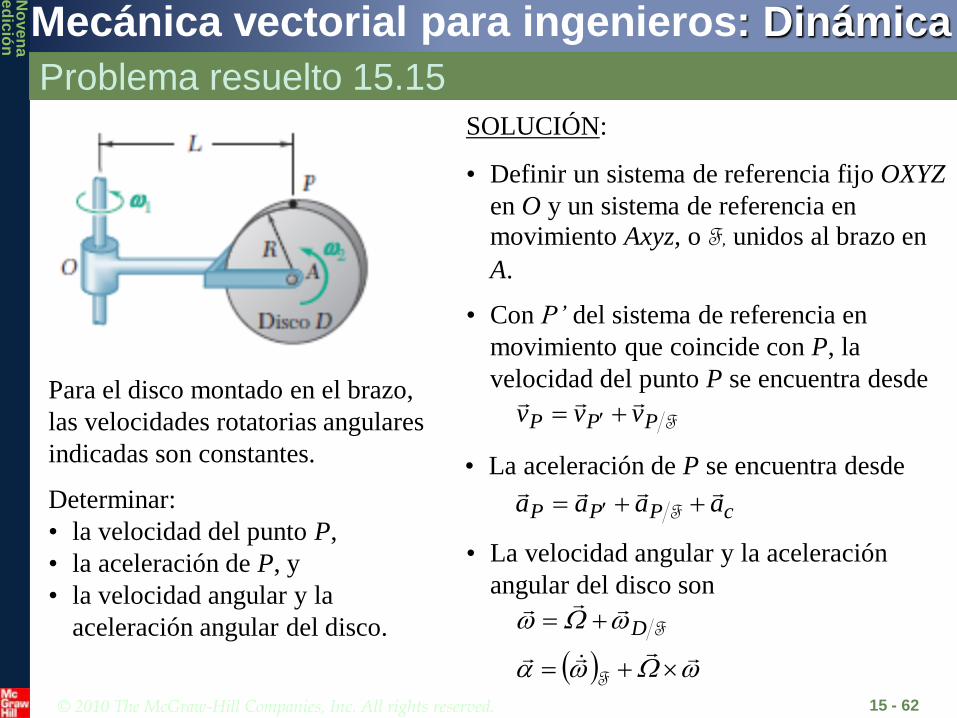
Para el disco montado en el brazo,
las velocidades rotatorias angulares
indicadas son constantes.
Determinar:
• la velocidad del punto P,
• la aceleración de P, y
• la velocidad angular y la
aceleración angular del disco.
SOLUCIÓN:
• Definir un sistema de referencia fijo OXYZ
en O y un sistema de referencia en
movimiento Axyz, o F, unidos al brazo en
A.
• Con P’ del sistema de referencia en
movimiento que coincide con P, la
velocidad del punto P se encuentra desde
FPPP vvv
• La aceleración de P se encuentra desde
cPPP aaaa
F
• La velocidad angular y la aceleración
angular del disco son
F
FD

© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.15
15 - 63
SOLUCIÓN:
• Definir un sistema de referencia fijo OXYZ en
O y un sistema de referencia en movimiento
Axyz, o F, unidos al brazo en A.
j
jRiLr
1
k
jRr
D
AP
2
F
• Con P’ del sistema de referencia en
movimiento que coincide con P, la velocidad
del punto P se encuentra desde
iRjRkrv
kLjRiLjrv
vvv
APDP
P
PPP
22
11
FF
F
kLiRvP
12
© 2010 The McGraw-Hill Companies, Inc. All rights reserved.
Mecánica vectorial para ingenieros: Dinámica
No
ve
na
e
dic
ión
Problema resuelto 15.15
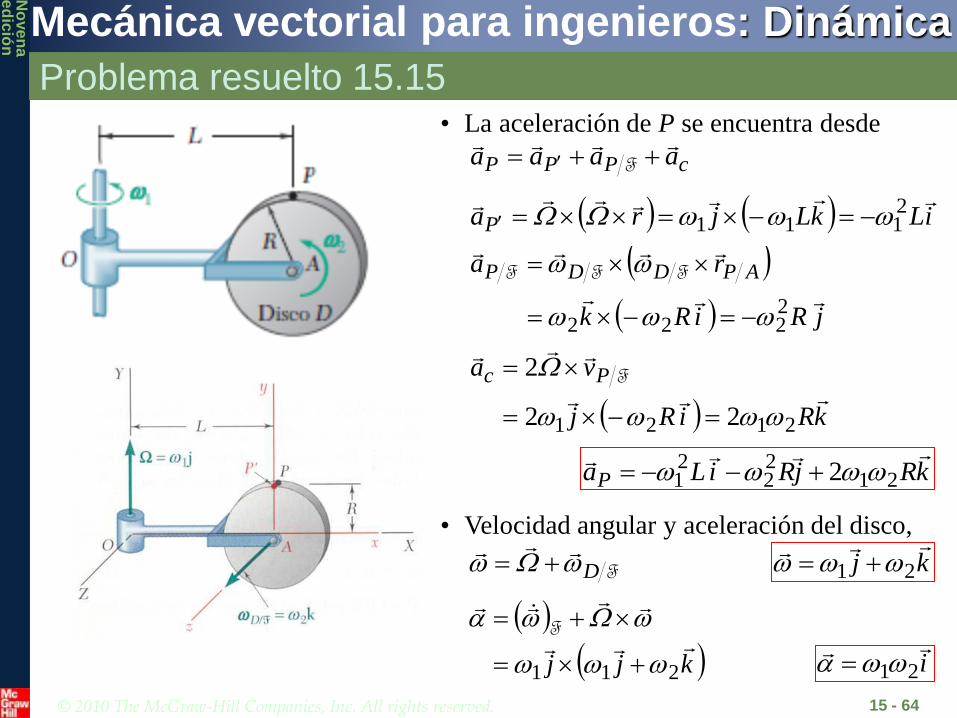
15 - 64
• La aceleración de P se encuentra desde
cPPP aaaa
F
iLkLjraP
2111
jRiRk
ra APDDP
2222
FFF
kRiRj
va Pc
2121 22
2
F
kRjRiLaP
21
22
21 2
• Velocidad angular y aceleración del disco,
FD
kj
21
kjj
211
F
i
21