parallel computing with load balancing on heterogeneous distributed systems
TRANSCRIPT

Parallel computing with load balancing on heterogeneous
distributed systems
Primoz Rus, Boris Stok*, Nikolaj Mole
Faculty of Mechanical Engineering, University of Ljubljana, Askerceva 6, Ljubljana SI-1000, Slovenia
Received 13 September 2002; revised 9 December 2002; accepted 9 December 2002
Abstract
In the present work, the parallelization of the solution of a system of linear equations, in the framework of finite element computational
analyses, is dealt with. As the substructuring method is used, the basic idea refers to a way of decomposing the considered spatial domain,
discretized by the finite elements, into a finite set of non-overlapping subdomains, each assigned to an individual processor and
computationally analysed in parallel. Considering the fact that Personal Computers and Work Stations are still the most frequently used
computers, a parallel computational platform can be built by connecting the available computers into a computer network. The
incorporated computers being usually of different computational power and memory size, the efficiency of parallel computations on such a
heterogeneous distributed system depends mainly on proper load balance. To cope the balance problem, an algorithm for the efficient load
balance for structured and free 2D quadrilateral finite element meshes based on the rearrangement of elements among respective sub-
domains, has been developed.
q 2003 Elsevier Science Ltd. All rights reserved.
Keywords: Parallel computing; Heterogeneous computer system; Load balancing
1. Introduction
With the development of both, the computers technology
on one hand and computational methods on the other hand,
technical problems, which can be computationally simu-
lated by corresponding numerical models, become more and
more comprehensive. In consequence, along with facilitated
investigations and increased physical understanding
achieved, the efficiency of problems solutions, especially
in R&D stage, is considerably improved. Unfortunately,
numerical treatment of complex physical problems by
discrete methods of analysis can lead to very large systems
of linear equations. Computer systems development in the
sense of parallel computers and connecting of single
computers into a group via a network, offer a possibility
for the solution of such large-size problems even when the
capability of a single computer is exceeded. Irrespective of
the parallelization strategies used, the issue of proper load
balancing, enabling highest computational efficiency,
becomes very important when the distributed computer
system is heterogeneous [1]. This is especially true for non-
linear and non-stationary problems, which are solved
incrementally, usually with much iteration needed within
an incremental step.
Domain decomposition has become a widely adopted
technique to develop parallel applications based on discrete
approximation methods [2], and in particular by the finite
element method [3–6] and the boundary element method
[7]. The FE computational scheme used in our parallel
approach relies on the substructuring method, according to
which the general problem equation, resulting from the
consideration of the whole problem domain, can be split into
a series of equations, pertaining to the individual sub-
domains, as obtained by the corresponding domain
decomposition. These equations can be solved only after
the solution of the associated interface problem, which
involves the complete determination of the physical
variables on the interfaces between adjacent subdomains.
For the solution of the interface problem direct [4] or
iterative solvers [2,6,8] may be applied. Here, use of the
direct solution approach will be made.
The efficiency of using the domain decomposition on the
heterogeneous system depends on a way the computational
0965-9978/03/$ - see front matter q 2003 Elsevier Science Ltd. All rights reserved.
doi:10.1016/S0965-9978(02)00141-2
Advances in Engineering Software 34 (2003) 185–201
www.elsevier.com/locate/advengsoft
* Corresponding author.
E-mail addresses: [email protected] (P. Rus), [email protected]
lj.si (B. Stok), [email protected] (N. Mole).

domain is divided into subdomains, and how the latter are
assigned to the processors. Clearly, the subdomains should
be assigned in such a way that all processors would be
engaged in the computation evenly, thus the execution of
the allocated task taking approximately the same time. Due
to heterogeneity of the considered computing system it is
obvious, that allocation of the same amount of work to each
processor would result in inefficient parallel computation,
with several processors being possibly idle even for a long
time. Though considering the established standard computer
performance characteristics, it is almost impossible to define
a priori such a balance ratio between the computers in the
heterogeneous distributed system that would yield efficient
parallel computation. This is mostly due to the fact that
actual computational performance of a processor, perform-
ing the allocated work, depends exclusively on the number
of degrees of freedom and the number of interface variables,
pertaining to the assigned subdomain.
Load balancing for heterogeneous parallel systems is a
relatively new subject of investigation with a less-explored
landscape. Due to reasons discussed above, static load
balancing based solely on the prior knowledge of com-
ponents performance, is rarely a successful option. In
consequence, some sort of dynamic load balancing must be
applied. One way of doing it is by decomposing the problem
into small and independent tasks, sending a task to each
component of the computing system, and sending a new task
to a component when it completes the previous task [9,10].
In this approach, the issue of load imbalance is actually
ignored. Another possibility, which seems to be reasonable
only when the range of processing power is broad, is given
by asymmetric load balancing [11]. A real dynamic load
balancing technique should use observed computational and
communication performance to predict the time a task
would complete on a given component and the time needed
to query the component. This approach, which can be
addressed in many different ways as standard clock
approach [12], a dynamic distributed load balancing based
on aspect ratio [13,14], a diffusion algorithm for hetero-
geneous computers [15], is also the path we are following.
In order to achieve efficient computation a strategy is
developed, which in course of ongoing of incremental
computation automatically rearranges the subdomains in
sense of the load balancing. Considering a solution of the
problem, equations presents the predominant source of CPU
time consumption the load balancing is conceived upon
computing times, realized on a processor while establishing
all the respective subdomain data needed for the setting and
solution of the interface problem. As the freely accessible
METIS program [16], which was used for mesh partitioning,
proved some deficiencies associated with the automatic load
balancing. We have developed an algorithm for the
rearrangement of elements among subdomains. The com-
putations being most efficient with smaller number of
interface nodes, the algorithm is developed by considering
minimization of the interface nodes.
All communications and data transfers among com-
puters in the distributed system were managed through
the ‘Parallel Virtual Machine (PVM)’ communication
library [17].
2. Substructuring method
Let us consider a physical problem defined on a domain
V. In the context of the FEM, the continuous problem is
discretized to yield a finite set of nodal primary and
secondary variables, u and f, respectively. The relationship
between them is given by the matrix equation Ku ¼ f: The
problem is fully determined by specifying the correspond-
ing boundary conditions u ¼ ur on Gu and f ¼ fm on Gf :
The basic idea of the substructuring method [3–5] is in
decomposing the considered spatial domain V into a finite
set of non-overlapping subdomains Vs (Fig. 1). As a result
of the domain decomposition any two adjacent subdomains
share the common interface boundary GI ; with conditions of
physical continuity and consistency to be respected on it.
Following the performed decomposition of the domain
V into Ns subdomains Vs; the general problem equation
Ku ¼ f must be accordingly restructured, with equations
associated to internal nodes of each subdomain numbered
first, and equations associated to interface nodes numbered
last. In general, the resulting system of equations has the
following matrix form:
K11 0 · · · 0 K1I
0 K22 · · · 0 K2I
..
. ... . .
. ... ..
.
0 0 · · · KNsNsKNsI
KI1 KI2 · · · KINsKII
266666666664
377777777775
u1
u2
..
.
uNs
uI
8>>>>>>>><>>>>>>>>:
9>>>>>>>>=>>>>>>>>;¼
f1
f2
..
.
fNs
fI
8>>>>>>>><>>>>>>>>:
9>>>>>>>>=>>>>>>>>;
ð1Þ
Fig. 1. Decomposition of the considered domain into two subdomains.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201186

The system matrix K, usually also called the stiffness
matrix, has a block-arrowhead form. Each diagonal
submatrix Kss represents the local stiffness of the subdomain
Vs; while the submatrix KII is the stiffness associated with
the nodal variables at the interface GI : An off-diagonal
submatrix KsI denotes the coupling stiffness between the
subdomain Vs and the interface GI : Accordingly, the vector
of primary variables u is partitioned into the subvectors us,
which correspond to the DOF pertaining to the interior of
the subdomains Vs; and the subvectors uI, associated with
DOF on GI : Similarly, fs denotes the part of the loading
vector f associated with the interior of Vs, while fI is a
subvector corresponding to the interface variables on GI.
If the matrix Eq. (1), is further restructured with respect
to given boundary conditions for the primary and secondary
variables, u ¼ ur on Gu and f ¼ fm on Gf ; respectively, the
following solution path can be traced
† Step 1. Given
KpIIu
pI ¼ fpI ð2Þ
solve for the unknown primary variables umI at interface
nodes. The respective matrix and vectors in Eq. (2) are
defined as
KpII ¼ Kmm
II 2XNs
s¼1
Kps
upI ¼ um
I ð3Þ
fpI ¼ fmI 2 Kmr
II urI 2
XNs
s¼1
fps
where
Kps ¼ ðKmm
sI ÞTðKmmss Þ21Kmm
sI
fps ¼ KmrIs ur
s 2 ðKmmsI ÞTðKmm
ss Þ21ðfms 2 Kmr
ss urs 2 Kmr
sI urI Þ
ð4Þ
† Step 2. With umi being determined in Step 1 solve for the
primary variables ums at internal nodes of each subdomain
Vs; ðs ¼ 1; 2;…;NsÞ
ums ¼ ðKmm
ss Þ21ðfms 2 Kmr
ss urs 2 Kmr
sI urI 2 Kmm
sI umI Þ ð5Þ
† Step 3. Finally, the unknown secondary variables at
internal nodes of each subdomainVs ðs ¼ 1; 2;…;NsÞ and
at interface nodes, frs and fr
I ; respectively, can be
determined
frs ¼ Krr
ssurs þ Krr
sI urI þ Krm
ss ums þ Krm
sI umI fr
I
¼ KrrII ur
I þ KrmII um
I þXNs
s¼1
½KrrIs ur
s þ KrmIs um
s � ð6Þ
The fact, that the local stiffness submatrices, associated with
the internal primary variables, Kmmss ;Kmm
sI ;Kmrss ;K
mrsI and Kmr
Is ;
are uncoupled is advantageous. It can be exploited for
concurrent computation of the matrices Kps and vectors fps for
each subdomain Vs; provided each subdomain computations
are allocated to a different processor.
The parallel implementation of the problem solution, as
determined by the algorithms 2–6 of the substructuring
method, is schematically presented in Fig. 2. From the
scheme, the sequence of computing steps with respective
objects of computations defined, as well as the master/slave
allocation of a particular computation can be seen.
3. Performance characterization of heterogeneous
computers
In order to take advantage of the mathematical structure of
the domain decomposed problem which enables concurrent
computing, it is of major importance for such a computation
to be efficient on heterogeneous distributed systems, that the
allocated processor work is well load balanced. Allocation of
the same amount of work to two individual computers of
different speed would mean that the faster computer would be
idle and waiting for the slower one to complete its
computation. To avoid such a situation the speed ratios of
computers in the heterogeneous distributed system should be
known, thus allowing for a corresponding proper load
balancing. There exist several standard benchmarks, such
as Whetstone [18], LINPACK [19] and HINT [20], that
Fig. 2. Parallel implementation of the substructuring method algorithm.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201 187

identify by different procedures computational efficiency of a
computer. The Whetstone benchmark defines the number
KIPS, which represents the number of operations per time
unit for different combinations of real mathematical
operations. The LINPACK benchmark presents the number
of real operations per time unit for solving of linear system of
N equations. Finally, HINT is a benchmark designed to
measure a computer processor and memory performance
without fixing neither the time nor the problem size. So,
HINT measures ‘QUIPS’ (QUality Improvement Per
Second) as a function of time, while ‘NetQUIPS’ is a single
number, that summarizes the QUIPS over time.
Our heterogeneous distributed computer system, used as
a testing system for the development of a proper parallel
computation strategy, is composed of a master computer
and six slave computers, interconnected by a HUB. Table 1
presents their characteristics.
All the cited standard benchmarks were performed in
double precision. The performed benchmark results are
presented in Table 2 in terms of respective performance
parameters. The second part of the table shows for each
benchmark the performance ratios of individual computers
normalized with respect to the first one (S1), which seems,
according to the performed benchmarks, to perform
computationally most efficiently.
It is evident from Table 2 that the analyzed compu-
tational performance, expressed by the corresponding
performance ratios, depends heavily on the benchmark.
This validation, though qualitatively fair, does not give clear
answer, what should be the computers performance when
running a real computational problem. Because of that, and
considering that finite element calculations are themselves
specific, in particular when substructuring method of
analysis is applied, we decided to perform special tests,
taking real nature of the considered problems into account.
The main objective of these tests was to find out, how the
tested computers perform with respect to different density of
finite element meshes, as well as with respect to different
number of interface nodes. Tests were performed on a
steady state heat transfer case, considering division of a
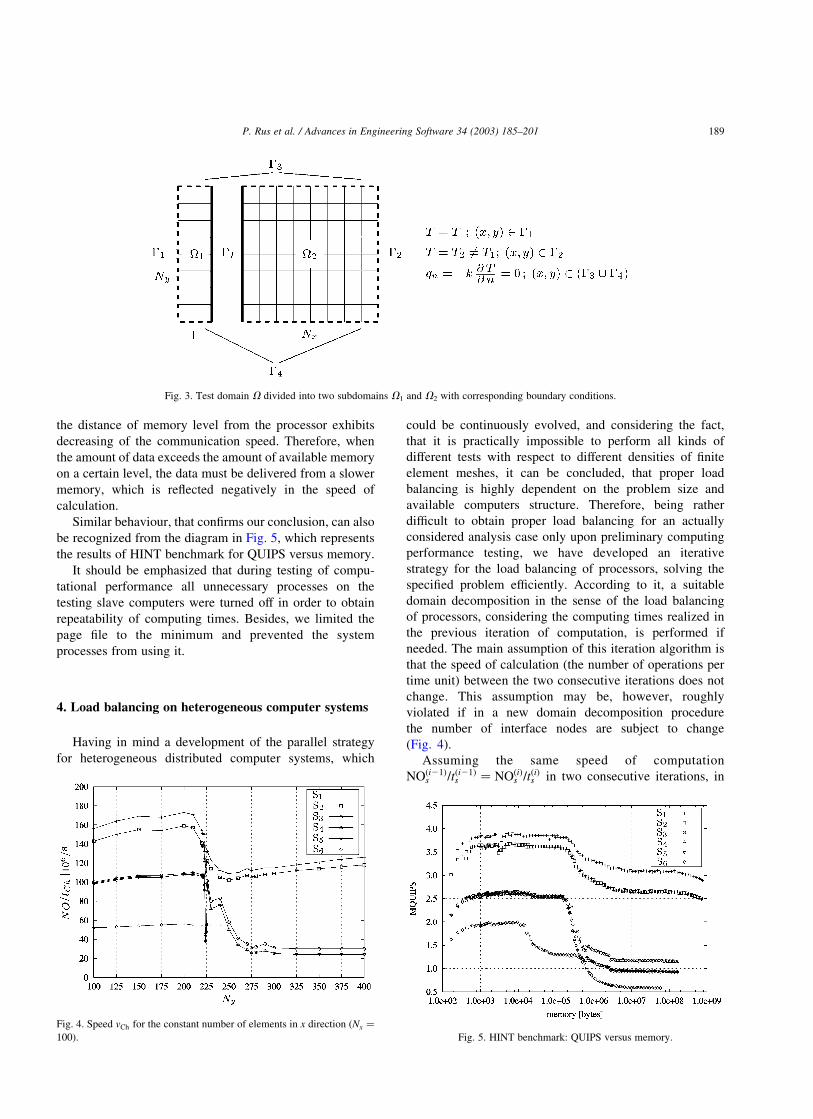
square domain into two subdomains (Fig. 3), with the
subdomain V2 being allocated to a computer whose
computational performance is to be identified.
Since a great amount of computational time in the slave
program is used for Cholesky decomposition of the matrix
Kmmss ¼ VT
s Vs; which is a symmetric banded matrix, saved in
a ‘sky-line’ form, we decided to define the speed of each
computer from the analysis of that time. The number of
floating-point operations for Cholesky decomposition can
be estimated by the equation
NOCh ¼Neð �NBW þ 1Þ2
2ð7Þ
where Ne is the number of equations corresponding to the
number of DOF of the problem, and �NBW means the half-
bandwidth of the matrix Kmmss : For a constant number of
elements in the x direction ðNx ¼ 100Þ the speed of
calculation vCh; which is defined as the ratio NOCh=tCh; is
presented as a function of the problem size in Fig. 4.
Variation of the number of elements in the y direction ðNyÞ;
while Nx being fixed, has dual effect on the computation.
First, it affects the number of matrix coefficients, and
second, it affects the number of interface nodes as well.
Especially the latter, being directly associated with the
matrix bandwidth, has a tremendous role on the efficiency of
computation.
As evident from diagrams in Fig. 4 the speed of
computers S1, S2, S3, S4 and S5 decreases drastically after
a certain number of interface nodes is reached. When
inspecting for a reason of such behaviour, we found out by
analysing the program for Cholesky decomposition that
decreasing of computational speed is a direct consequence
of computer hardware structure. Actually, of the speed
of communication regarding whether processor, cache
memory or RAM is addressed. As a rule, increasing of
Table 1
Characteristics of computers in the heterogeneous distributed system
Label Type Processor RAM (MB) OS Type of program
M WS, HP B2000 PA-8000 400 MHz 1024 HP-UX 10.0 Master
S1 PC P IV 1.7 GHz 1024 WIN 2000 SP2 Slave
S2 PC P IV 1.7 GHz 1024 WIN 2000 SP2 Slave
S3 PC P III 800 MHz 256 WIN 2000 SP2 Slave
S4 PC P III 800 MHz 256 WIN 2000 SP2 Slave
S5 PC P III 800 MHz 256 WIN 2000 SP2 Slave
S6 PC P III 600 MHz 128 WIN 2000 SP2 Slave
Computers are connected via Intel InBusiness 8-Port 10/100 Fast Hub.
Table 2
Benchmark of Whetstone, LINPACK and HINT and their performance
ratios
Label KIPS mflops MNetQUIPS rKIPS rmflops rMNetQUIPS
S1 0.84 169.50 55.13 1.00 1.00 1.00
S2 0.82 177.10 50.11 1.03 0.96 1.10
S3 0.68 61.54 28.76 1.24 2.75 1.92
S4 0.68 45.95 27.35 1.24 3.69 2.02
S5 0.68 45.64 27.23 1.24 3.71 2.02
S6 0.51 27.41 18.22 1.66 6.18 3.03
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201188
the distance of memory level from the processor exhibits
decreasing of the communication speed. Therefore, when
the amount of data exceeds the amount of available memory
on a certain level, the data must be delivered from a slower
memory, which is reflected negatively in the speed of
calculation.
Similar behaviour, that confirms our conclusion, can also
be recognized from the diagram in Fig. 5, which represents
the results of HINT benchmark for QUIPS versus memory.
It should be emphasized that during testing of compu-
tational performance all unnecessary processes on the
testing slave computers were turned off in order to obtain
repeatability of computing times. Besides, we limited the
page file to the minimum and prevented the system
processes from using it.
4. Load balancing on heterogeneous computer systems
Having in mind a development of the parallel strategy
for heterogeneous distributed computer systems, which
could be continuously evolved, and considering the fact,
that it is practically impossible to perform all kinds of
different tests with respect to different densities of finite
element meshes, it can be concluded, that proper load
balancing is highly dependent on the problem size and
available computers structure. Therefore, being rather
difficult to obtain proper load balancing for an actually
considered analysis case only upon preliminary computing
performance testing, we have developed an iterative
strategy for the load balancing of processors, solving the
specified problem efficiently. According to it, a suitable
domain decomposition in the sense of the load balancing
of processors, considering the computing times realized in
the previous iteration of computation, is performed if
needed. The main assumption of this iteration algorithm is
that the speed of calculation (the number of operations per
time unit) between the two consecutive iterations does not
change. This assumption may be, however, roughly
violated if in a new domain decomposition procedure
the number of interface nodes are subject to change
(Fig. 4).
Assuming the same speed of computation
NOði21Þs =tði21Þ
s ¼ NOðiÞs =tðiÞs in two consecutive iterations, in
Fig. 3. Test domain V divided into two subdomains V1 and V2 with corresponding boundary conditions.
Fig. 4. Speed vCh for the constant number of elements in x direction ðNx ¼
100Þ: Fig. 5. HINT benchmark: QUIPS versus memory.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201 189
the (i 2 1)th iteration with known computation times tði21Þs
on each computer, and the ith iteration yet to be performed,
new shares, aimed at simultaneous computing ðtðiÞ1 ¼ tðiÞ2 ¼
· · · ¼ tðiÞNsÞ on all the processors, in a new iteration can be
defined
NOði21Þs ; tði21Þ
s ) dðiÞs ¼
NOðiÞsXNs
k¼1
NOðiÞk
¼NOði21Þ
s
tði21Þs
XNs
k¼1
NOði21Þk
tði21Þk
!21
;
s ¼ 1; 2;…;Ns
ð8Þ
Here, we assume that the number of operations NOs;
performed on the sth processor, can be estimated in some
way, considering the characteristic discretization par-
ameters of the sth subdomain. Irrespective of the estimation
formula, the reshaping of the subdomains must be done in
accordance with the constraint equation
XNs
s¼1
NðiÞes
þ NðiÞeI
¼XNs
s¼1
Nði21Þes
þ Nði21ÞeI
¼ Ne ¼ const ð9Þ
where Ne is the total number of equations associated with
the solution of the original problem, defined on the whole
domain V, while Nesand NeI
are, respectively, the number
of equations referring to the internal DOF in the subdomain
Vs and DOF on the interface GI in the substructured
problem.
The above load balancing algorithm is conceived
generally. However, its efficiency can be affected by
deviations from the basic assumption, actually realized
within the load balancing iteration process. In conse-
quence, to keep the load balancing stable and convergent,
the changes associated with the rearrangement of the
subdomains, should be smooth enough to prevent
eventual destruction of the established mathematical
structure of the parallelized problem. In the sequel, we
will point out some issues, which arise when applying
the described procedure to structural and free domain
decomposition.
4.1. Structured domain decomposition
When a problem domain is characterized by simple
geometry, usually, a regular discretization pattern can be
applied. Then, the domain can be decomposed by following
some topological patterns, which are not subject to shape
variations, irrespective of eventual subdomain rearrange-
ments due to load balancing. Such a domain decomposition
that is reflected only in aspect ratio variation will be referred
as a structured one. Although the associated load balancing
problem can be trivial, it can serve as a good test example of
the described numerical procedure, revealing some general
properties.
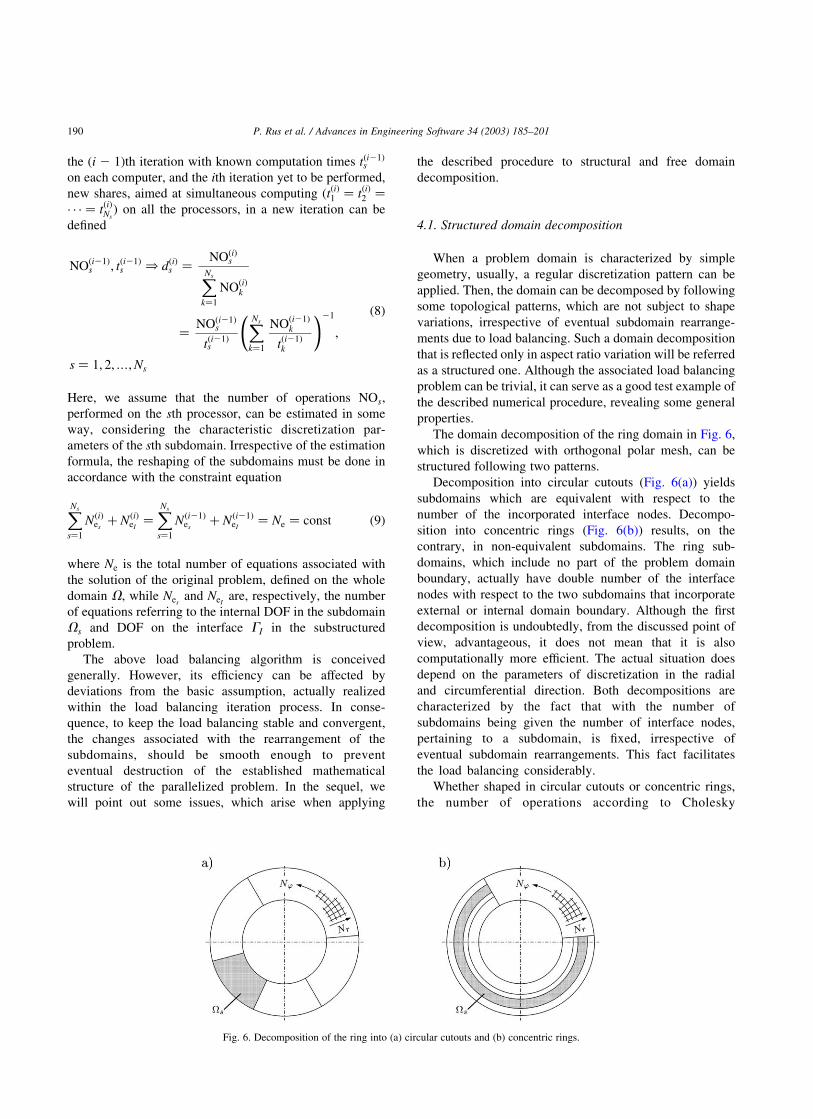
The domain decomposition of the ring domain in Fig. 6,
which is discretized with orthogonal polar mesh, can be
structured following two patterns.
Decomposition into circular cutouts (Fig. 6(a)) yields
subdomains which are equivalent with respect to the
number of the incorporated interface nodes. Decompo-
sition into concentric rings (Fig. 6(b)) results, on the
contrary, in non-equivalent subdomains. The ring sub-
domains, which include no part of the problem domain
boundary, actually have double number of the interface
nodes with respect to the two subdomains that incorporate
external or internal domain boundary. Although the first
decomposition is undoubtedly, from the discussed point of
view, advantageous, it does not mean that it is also
computationally more efficient. The actual situation does
depend on the parameters of discretization in the radial
and circumferential direction. Both decompositions are
characterized by the fact that with the number of
subdomains being given the number of interface nodes,
pertaining to a subdomain, is fixed, irrespective of
eventual subdomain rearrangements. This fact facilitates
the load balancing considerably.
Whether shaped in circular cutouts or concentric rings,
the number of operations according to Cholesky
Fig. 6. Decomposition of the ring into (a) circular cutouts and (b) concentric rings.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201190

decomposition, Eq. (7), when applied to the subdomain
Vs; can be expressed by linear relationship
NOðiÞs ¼ cðiÞs NðiÞ
es;
cðiÞs ¼ð �NðiÞ
BWsþ 1Þ2
2¼ cði21Þ
s ¼ const
ð10Þ
Considering the above relationship in Eq. (8) and
respecting the constraint Eq. (9), a system of ðNs 2 1Þ
equations can be obtained
cðiÞs NðiÞes
¼ dðiÞs
XNs21
k¼1
cðiÞk NðiÞekþ cðiÞNs
Ne 2XNs21
k¼1
NðiÞek
!" #;
s ¼ 1; 2;…;Ns 2 1
ð11Þ
The solution of the above system is a vector of NðiÞes;
which ensures within some tolerance the required
subdomain shares dðiÞs :
For the considered ring domain, with the discretization
being defined by the corresponding number of elements in
the rðNrÞ and wðNwÞ direction, the task of load balancing is
really trivial. The number of subdomain equations NcðiÞes
¼
NðiÞes
for a circular cutout subdomain VcðiÞs can be directly
expressed in terms of the respective discretization in the w
direction. With essential boundary conditions assumed, the
following relationship is true
NcðiÞes
¼ ðNr þ 1ÞðNðiÞws2 1Þ2 2ðNðiÞ
ws2 1Þ ð12Þ
which after its resolution yields the respective number of
elements in the w direction for the considered subdomain
NcðiÞws
¼NðiÞ
es
Nr 2 1þ 1 ð13Þ
Similarly, the number of subdomain equations NrðiÞes
¼ NðiÞes
for a concentric ring subdomain VrðiÞs can be expressed in
terms of the respective discretization in the r direction as
NrðiÞes
¼ ðNðiÞrs
2 1ÞNw ð14Þ
yielding the respective number of elements in the r direction
for the considered subdomain
NrðiÞrs
¼NðiÞ
es
Nw
þ 1 ð15Þ
Because values of the vectors NcðiÞws
and NrðiÞrs
are in general in
R, they must be transformed into h considering the
constraint equations Nw ¼PNs
s¼1 NcðiÞws
and Nr ¼PNs
s¼1 NrðiÞrs
:
Due to simplicity of the considered problem, some
characteristic properties regarding load balancing can be
easily revealed by running a real physical problem. In the
sequel, results from the steady state heat transfer analysis of
the ring in Fig. 6, performed in parallel on six processors, will
be considered. The corresponding computations were per-
formed on the heterogeneous distributed system, that is
described in Table 1, and qualitatively characterized in
Table 2 and Fig. 4. On three distinct meshes ðNr £ NwÞ
considered (100 £ 1000), (1000 £ 100) and (250 £ 250),
respectively, effects of the structured domain decomposition
into circular cutouts and concentric rings on the compu-
tational efficiency were investigated. Load balancing was
performed on the slave level according to the respective load
balancing formulas (8), (11) and (13) or (15). The parameters,
that are listed in Tables 3–6, characterize dominantly a
particular computational case. Referring to a subdomain Vs
they are in turn:
Vs ! Sc allocation of the subdomain Vs to the processor Sc
Nrs;Nws
respective discretization parameters in the r and w
direction
Nesnumber of equations
NPFsprofile of the stiffness matrix
NIsnumber of interface nodes
�NBWsaverage half-bandwidth of the stiffness matrix.
Table 3
Structured domain decomposition of the ring (100 £ 1000) into circular
cutouts
Iter Vs ! Sc NwsNes
NPFsNIs
�NBWstSls
½s�
0 V1, S1 167 16,434 3,281,121 202 199 1.66
V2, S2 167 16,434 3,281,121 202 199 1.92
V3, S3 167 16,434 3,281,121 202 199 2.65
V4, S4 167 16,434 3,281,121 202 199 2.78
V5, S5 166 16,335 3,263,832 202 199 2.78
V6, S6 166 16,335 3,263,832 202 199 4.78
devðtSlÞ (%) 96.75
1 V1, S1 248 24,453 4,889,129 202 199 2.45
V2, S2 214 21,087 4,215,963 202 199 2.45
V3, S3 156 15,345 3,065,182 202 199 2.49
V4, S4 148 14,553 2,906,226 202 199 2.46
V5, S5 147 14,454 2,882,661 202 199 2.46
V6, S6 87 8,514 1,686,579 202 198 2.52
devðtSlÞ (%) 2.81
Table 4
Structured domain decomposition of the ring (1000 £ 100) into concentric
rings
Iter Vs ! Sc NrsNes
NPFsNIs
�NBWstSls
½s�
0 V1, S1 167 16,600 1,699,302 100 102 0.52
V2, S2 167 16,600 3,339,302 200 201 1.94
V3, S3 167 16,600 3,339,302 200 201 2.79
V4, S4 167 16,600 3,339,302 200 201 2.80
V5, S5 166 16,500 3,319,005 200 201 2.81
V6, S6 166 16,500 1,689,005 100 102 1.59
devðtSlÞ (%) 137.61
1 V1, S1 473 47,200 4,850,184 100 102 1.46
V2, S2 123 12,200 2,446,234 200 200 1.44
V3, S3 85 8,400 1,674,948 200 199 1.43
V4, S4 85 8,400 1,674,948 200 199 1.44
V5, S5 84 8,300 1,654,651 200 199 1.45
V6, S6 150 14,900 1,524,253 100 102 1.44
devðtSlÞ (%) 2.07
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201 191

Iteration counter Iter stands for the number of iterations
needed to achieve load balance within a required tolerance.
The load balancing is performed upon realized times tSlsin the
(i 2 1)th iteration by computing the subdomain shares dðiÞs
according to Eq. (8). Time tSlsis the time of assembling the
local stiffness matrices and local loading vector, plus the time
of computing the matrix Kps and vector fps in the slave program
(Fig. 2). With devðtSlÞ; percentage of deviation from the ideal
balance is measured taking the difference between maximal
and minimal value of the time tSlsover their mean value.
As can be seen from Tables 3–6 the initial partition
was performed into six equally sized subdomains, which
resulted because of the heterogeneity of the computer system
in non-balanced computation times tSls: With the implemen-
tation of the load balancing algorithm and respective
reshaping of the subdomains from the previous iteration, the
load balanced subdomains were achieved in one further
iteration for the first two cases (Tables 3 and 4), while for the
cases presented in Tables 5 and 6 two and three iterations,
respectively, were needed. With limit of the deviation devðtSlÞ
set to5% the load balance for the first three cases was achieved
within this limit, while in the fourth case, the load balancing
procedure was stopped because of the repetition of the
respective discretization parameters in the r direction,
obviously due to not enough refined discretization.
As the (100 £ 1000) and (1000 £ 100) discretization cases
are totally equivalent with respect to the number of elements,
while considering the nature of the prescribed boundary
conditions they differ only slightly regarding the respective
numberofunknownprimaryvariables, actually99,000versus
99,900, the considered two cases are convenient for a
comparative analysis. Especially, for considering the effect
of the subdomain pattern used in the domain decomposition.
The advantage of using decomposition in concentric rings is
obvious, the reason for that, according to Eq. (7), being the
strongly reduced number of interface nodes for the two
boundary subdomains V1 and V6; respectively. The same
conclusions can be made when considering the (250 £ 250)
discretization case. Though the number of unknown primary
variables is smaller than in the former two cases, actually
62,250 versus 99,000 (or 99,900), the respective parallel
computations are considerably longer. The role of the number
of interface nodes is even more exposed. What is certainly
worth of our attention is the fact, that the processor S6, though
the worst with respect to the performed characterization
(Table 2, Fig. 4), is able to contribute significantly in the
overall computational efficiency, if only the correct sub-
domain, characterized by proper favourable discretization
properties, is allocated to it. Otherwise, the computational
performance can be spoiled tremendously.
4.2. Free domain decomposition
In most real life cases structured finite element meshes
cannot be applied, which means, that in consequence also
structured domain decomposition cannot be performed.
Table 6
Structured domain decomposition of the ring (250 £ 250) into concentric
rings
Iter Vs ! Sc NrsNes
NPFsNIs
�NBWstSls
½s�
0 V1, S1 42 10,250 2,530,627 250 246 3.14
V2, S2 42 10,250 4,968,127 500 484 11.12
V3, S3 42 10,250 4,968,127 500 484 33.23
V4, S4 42 10,250 4,968,127 500 484 34.05
V5, S5 41 10,000 4,842,380 500 484 33.33
V6, S6 41 10,000 2,467,380 250 246 4.69
devðtSlÞ (%) 166.19
1 V1, S1 111 27,500 6,894,670 250 250 8.29
V2, S2 32 7,750 3,710,657 500 478 8.57
V3, S3 11 2,500 1,069,970 500 427 9.51
V4, S4 11 2,500 1,069,970 500 427 9.75
V5, S5 11 2,500 1,069,970 500 427 9.77
V6, S6 74 18,250 4,554,531 250 249 8.39
devðtSlÞ (%) 16.41
2 V1, S1 114 28,250 7,084,411 250 250 8.51
V2, S2 32 7,750 3,710,657 500 478 8.56
V3, S3 10 2,250 9,44,223 500 419 8.77
V4, S4 10 2,250 9,44,223 500 419 8.97
V5, S5 10 2,250 9,44,223 500 419 9.01
V6, S6 74 18,250 4,554,531 250 249 7.96
devðtSlÞ (%) 12.38
3 V1, S1 112 27,750 6,957,917 250 250 8.36
V2, S2 31 7,500 3,584,910 500 477 8.31
V3, S3 10 2,250 944,223 500 419 8.77
V4, S4 9 2,000 818,476 500 409 8.18
V5, S5 9 2,000 818,476 500 409 8.19
V6, S6 79 19,500 4,870,766 250 249 8.46
devðtSlÞ (%) 6.97
Table 5
Structured domain decomposition of the ring (250 £ 250) into circular
cutouts
Iter Vs ! Sc NwsNes
NPFsNIs
�NBWstSls
½s�
0 V1, S1 42 10,209 4,946,193 502 484 10.29
V2, S2 42 10,209 4,946,193 502 484 11.05
V3, S3 42 10,209 4,946,193 502 484 33.22
V4, S4 42 10,209 4,946,193 502 484 33.98
V5, S5 41 9,960 4,761,353 502 478 32.83
V6, S6 41 9,960 4,761,353 502 478 41.54
devðtSlÞ (%) 120.56
1 V1, S1 80 19,671 9,701,988 502 493 19.24
V2, S2 75 18,426 9,018,459 502 489 19.25
V3, S3 25 5,976 2,757,809 502 461 19.83
V4, S4 25 5,976 2,757,809 502 461 20.20
V5, S5 25 5,976 2,757,809 502 461 20.35
V6, S6 20 4,731 2,191,848 502 463 20.95
devðtSlÞ (%) 8.52
2 V1, S1 82 20,169 9,952,233 502 493 19.66
V2, S2 76 18,675 9,201,480 502 492 19.69
V3, S3 25 5,976 2,757,809 502 461 19.83
V4, S4 24 5,727 2,692,692 502 470 19.86
V5, S5 24 5,727 2,692,692 502 470 20.02
V6, S6 19 4,482 2,006,447 502 447 19.39
devðtSlÞ (%) 3.20
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201192

With the free mesh discretization given, the free
domain decomposition is needed. Along with many
automatic mesh generators developed in the past also a
lot of automatic algorithms for the partitioning of free
meshes were developed. Nowadays, the most used
algorithms are based on multi-level graph partitioning.
Such a software program is METIS [16] which is freely
accessible on the Internet http://www.cs.umn.edu/~metis.
It is used for partitioning of large irregular graphs,
partitioning of large meshes, and computing of fill-
reducing orderings of sparse matrices based on multi-
level graph partitioning. The included algorithms can
partition finite element meshes into the shares of
elements requested in each subdomain, with the minimal
number of interface nodes.
Contrary to relative simplicity of the load balancing
problem associated with the structured domain decompo-
sition which proved to respect quite well the assumption
leading to load balancing Eq. (8), the load balancing in free
domain decomposition problem is far more complex. The
main difficulty arises from the fact, that there is no evident
and simple direct relationship between the number of
elements and number of interface nodes for a respective
arbitrary shaped domain. In consequence, a supposition can
be set defining the number of operations in Eq. (8) as a
function of the number of elements
NOðiÞs ¼ ~cðiÞs NðiÞ
Elsð16Þ
where ~cðiÞs is a constant characterizing the considered
subdomain. If we suppose further, that the shape of the
subdomain and consequently the number of respective
interface nodes do not change too much in two consecutive
steps of load balancing, which applies otherwise for the
structured domain decomposition of the previously con-
sidered ring case exactly, we can assume with high
probability, that the respective number of operations and
number of elements change proportionally by domain
reshaping. Therefore, ~cði21Þs ¼ ~cðiÞs can be assumed.
The assumption yielding Eq. (8) being still true, this
results in a system of ðNs 2 1Þ equations
~cðiÞs NðiÞEls
¼ dðiÞs
XNs
k¼1
NOðiÞk ; s ¼ 1; 2;…;Ns 2 1 ð17Þ
By considering the element constraint equation regarding
the total number of elements NEl in the whole domain V
XNs
k¼1
NðiÞElk
¼ NEl ¼ const ð18Þ
the system of Eq. (17) can be rewritten as
~cðiÞs NðiÞEls
¼ dðiÞs
XNs21
k¼1
~cðiÞk NðiÞ
Elkþ ~c
ðiÞNs
NEl 2XNs21
k¼1
NðiÞElk
!" #;
s ¼ 1; 2;…;Ns 2 1
ð19Þ
with a vector of NðiÞEls
as a solution. With shares dðiÞs specified
upon the known data from a previous iteration (8), the
solution vector, that must be transformed into N considering
Eq. (18), tries to achieve conditions for load balance.
Efficiency of the load balancing is definitely dictated by the
degree of actual deviations from the basic assumptions.
The above load balancing strategy applied to free domain
decomposition was tested by considering the steady state
heat transfer analysis of the square domain, shown in Fig. 3.
Though discretized with regular orthogonal mesh free
domain, decomposition is applied in all steps of load
balancing process.
In the METIS program, there are 24 different combinations
of parameters with which the behaviour of the partitioning
algorithm can be influenced. Since for a small number of
partitions the multi-level recursive bisection algorithm
should be used instead of the multi-level k-way algorithm,
the number of possible parameter combinations decreases to
six. Our experience has shown, however, that for different
domain shapes and different shares of elements in the
respective subdomains, these parameters do attain the
required element shares, but produce more or less good
results with respect to topological properties, affecting thus
the efficiency of the respective parallel computations
considerably. Also in parallel computations, it is usual and
reasonable, that computations regarding a specific subdo-
main are allocated to the same processor all through the
analysis. It is certainly the only secure way of controlling the
load balancing process. But when using the METIS program in
consecutive steps of the load balancing procedure, we found
out that there is no guaranty for the METIS program neither to
retain the respective subdomain positions in space nor to
perform smoothly the respective reshapings. This behaviour
has actually a similar consequence, as if the subdomains
processor allocations would be changed, which makes the
METIS program definitely unreliable for load balancing
purposes. Another deficiency regarding the METIS program
concerns the minimization of the number of interface nodes,
which is not really effective. Though of minor importance, it
is to be considered in eventual reshapings performed later on.
Performing of the load balancing algorithm, coupled
with free domain decomposition, as generated by the METIS
program, on the test case of Fig. 3, revealed the described
deficiencies of the METIS program evidently. The results of
the performed three load balancing iterations that are
tabulated in Table 7, show the catastrophic effect, that is
caused by the change of the relative position of respective
subdomains in space (Fig. 7). In the considered case this is
manifested by a rough change of the number of interface
nodes NIs; contrary to the assumed smooth variation on
which the load balancing algorithm is based. Yet, from the
presented computing times, it is evident, that the load
balancing algorithm does work correctly, if the subdomain
positions are not subject to change during the consecutive
load balancing iterations. This can be inspected by
considering results of Table 7 for the first and third iteration.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201 193

Because of those facts we decided to follow a
different approach, with only initial free domain
decomposition performed by the METIS program, con-
sidering a decomposition with the minimum number of
interface nodes. For all the following rearrangements of
elements needed, due to load balance, we have developed
our own algorithm.
5. Algorithm for elements rearrangement between
subdomains
Considering the basic assumptions that were adopted in
the derivation of the load balancing algorithm Eq.(8), the
major demand on the algorithm for rearrangement of
elements between subdomains is that, the respective number
of interface nodes should change smoothly and their number
minimized as much as possible by the rearrangement of
elements. The algorithm should work for structured and free
2D quadrilateral finite element meshes.
5.1. General considerations
Let us consider two subdomains, V1 and V2; with e1
and e2 being the respective numbers of elements. If a
certain amount of elements De is rearranged between the
two subdomains, this results in formation of the new
subdomains ~V1 and ~V2; with ~e1 and ~e2 being the respective
numbers of elements. The integrity of the whole domain
being preserved, i.e. V1 <V2 ¼ ~V1 < ~V2; the identity
e1 þ e2 ¼ ~e1 þ ~e2 is true. The performed elements
rearrangement can be referred to as the subdomains
reshaping.
The most natural way of reshaping the subdomains V1
and V2 is certainly by transferring the required amount of
elements Deþ ¼ De1 . 0 from a surplus subdomain Vþ ¼
V1 to a deficit subdomain V2 ¼ V2 ðDe2 ¼ De2 ¼ 2De1Þ
over the common interface. In principle, this transfer could
be done arbitrarily, but with a risk to not attain
computational performance aimed to. Though obtaining
the demanded share of elements ~e1 and ~e2; with no
surplus/deficit element ðD~e1 ¼ D~e2 ¼ 0Þ; the efficiency of
the computation would be very probably damaged signifi-
cantly, because there is no controlled variation of the other
parameters, affecting the computation as well. In order to
fulfil the basic supposition of our approach, those par-
ameters should change sufficiently smoothly by the
elements transfer. The transfer procedure that will be
presented in the sequel is conceived in a way that, this goal
can be attained.
The number of interface nodes is no doubt the parameter
of greatest relevance. Its effect on the computation time is
multiple—it affects actually the computations performed in
parallel on the substructure level, as well as the computation
of the interface problem solution, performed by the master
computer. Considering the optimal organization of the
substructure matrices [3] the number of interface nodes can
be directly associated with the bandwidth, with quadratic
dependence on the number of operations in Cholesky
decomposition Eq. (7). Our elements transfer algorithm is
traced, so that the number of interface nodes is tried to be
minimized.
First, let us introduce some basic principles and
corresponding terminology regarding the elements transfer
operation. Whatever be the number of the subdomains, the
transfer is always performed between two subdomain groups
Table 7
Load balancing upon domain partitioning by METIS ðNEl ¼ 100; 000Þ
Vs ! Sc Iter ¼ 0 Iter ¼ 1 Iter ¼ 2 Iter ¼ 3
shElsNIs
tSlsshEls
NIstSls
shElsNIs
tSlsshEls
NIstSls
V1, S3 0.333 114 1.79 0.447 108 2.40 0.448 109 2.39 0.455 106 2.41
V2, S4 0.333 110 1.89 0.425 104 2.40 0.423 216 7.20 9.143 252 5.73
V3, S5 0.334 224 6.33 0.128 212 2.37 0.129 107 0.78 0.402 146 2.54
tSlmax6.33 2.40 7.20 5.37
Fig. 7. Subdomain space allocation according to domain partitioning by METIS.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201194

Vþ and V2 having equal number of surplus and deficit
elements. These groups are constructed in some convenient
way from the existing subdomains Vs; not necessarily
including all of them. The common boundary represents the
transfer interface GT; along which elements will be
transferred from the surplus subdomain Vþ to the deficit
subdomain V2: All the elements from the subdomain Vþ
facing or just touching the transfer interface GT; i.e. elements
having at least one node common with the interface, are
potential candidates for the transfer. From those elements the
interface front is formed, the sequence of elements being
arranged continuously from beginning (S) to the end (E) of
the transfer interface, thus respecting interelement connec-
tivity. Since elements can be connected either through a
single node or through an edge, the interface front can be
further characterized by identifying sequences of elements,
referred in the sequel as connectivity rows, having edge or
node connectivity. By definition, no element in the row may
be connected, either by edge or by node, with more than two
row elements. In such a row, the first and the last element, as
well as the sequential order of the elements in between, are
clearly defined. As exception, a row may consist of one single
element. The interface front will thus consist, in general, of
several edge-connectivity rows, which are themselves linked
by node-connectivity rows.
5.2. Priority criteria for elements transfer across
a two-domain interface
The transfer of elements from the interface front
should be performed in such a way, that we arrive at
computationally advantageous subdomain reshaping.
Therefore, the transfer priority criteria have to be specified
first. These criteria can be established upon topological
considerations, actually, upon classification of the relative
position of each connectivity row with respect to the
interface layout. With respect to the topological properties
of the respective first (F) and last (L) element, a connectivity
row can be classified into one of six classes. Also, to one of
these two elements, the status of the starting element is
attributed, the transfer of the row elements starting with it.
The properties, characterizing the six classes into which
connectivity rows are classified, are as follows:
† R4 class: when either one or both of F/L elements
has/have four interface nodes; the starting element is the
one sharing three edges with the interface, if existing,
otherwise the first element in the row.
† R3D class: when both of F/L elements have three
interface nodes; the starting element is the first element
in the row.
† R3 class: when one of F/L elements has three interface
nodes; the starting element is the one with three interface
nodes.
† R2 class: when both of F/L elements have two interface
nodes; the starting element is the first element in the row.
† R1 class: when a row consists of one single element with
interface node connectivity.
† R0 class: when a row consists of several elements
with interface node connectivity; the starting element
is the first element in the row.
The edge-connectivity rows (R4 class–R2 class) are
ranked in descending order, R4 class having the highest
priority and R2 class having the lowest priority. The node-
connectivity rows have no priority. R0 class rows are not
subject to transfer at all, avoiding thus a possibility of
wedge-like reshaping, while transfer of R1 class rows is
only conditional. Actually, a considered R1 class row is
transferred, only if at a given stage of the transfer operation,
the both adjacent edge-connectivity rows prove the same
priority, and are to be moved due to fulfilling the highest
priority criterion then applicable.
5.3. Two-domain reshaping
With the transfer criteria determined, the procedure of
elements rearrangement between the considered subdomains
V þ andV 2 can begin. The subdomains reshaping is a multi-
step process, which demands at each step the identification of
actual transfer parameters—number of elements to be
transferred, interface front and sequence of connectivity
rows. Upon rows classification into classes, only the rows
ranked highest, according to the specified transfer priority
criteria, are eligible to move within the considered step. If the
actual number of surplus elements is greater than the number
of elements eligible for the transfer, the latter are moved
completely, otherwise only a part of them. Elements are thus
transferred row by row, element after element, starting from
the starting element in a row and following the established
sequential order in it. With the number of surplus elements
being less or equal to the number of elements eligible to move
the subdomains, reshaping is accomplished within the
considered step, otherwise another step is required with
further transfer of elements.
The sequence of pictures (a–k) in Fig. 8 shows the steps
in the elements transfer procedure which are performed
according to a highest priority criterion, that is valid at a
considered step. The example clearly demonstrates ten-
dency of the transfer algorithm to smooth the interface
between the considered subdomains, minimizing thus the
number of nodes on it.
The elements transfer is finished when all the elements
needed to establish a required subdomain element ratio ~e1 :
~e2 between the considered subdomains, are moved across
the interface GT: As a consequence, the subdomains Vþ ¼
V1 and V2 ¼ V2 are reshaped into subdomains ~V1 and ~V2:
If, however, for any reason the integrity of the subdomain
V1; which is obtained from the surplus subdomain Vþ1 ; is
violated during the elements rearrangement, thus resulting in
division of V1 in several disconnected subdomains
V1:1; V1:2;…; the following procedure is applied. One
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201 195

Fig. 8. Steps in elements transfer according to transfer priority criteria.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201196

among the subdomains V1:1; V1:2;…; having some advan-
tageous property for further reshaping, is kept, while the
others are merged in the subdomain V2: The merged
subdomainbecomes thus asurplus subdomainand the process
of elements transfer to the remainder of V1 can start again.
The described anomalous domain disintegrity is likely to
happen if a domain is not convex, or if the finite element
discretization is characterized by free meshing. In Fig. 9,
two subdomain layouts leading to this phenomenon are
shown. In both cases, the transfer of elements, if performed
sufficiently long, leads to disintegration of the initial surplus
domain into two subdomains. Considering the necessary
merging of one of them to the initial deficit domain, two
properties that are advantageous with respect to further
reshaping can be visualized. It is certainly advantageous
to merge small subdomains, retaining the largest one
(Fig. 9(a)), and to merge island-like subdomains, retaining
the boundary one (Fig. 9(b)).
5.4. Multi-domain reshaping
The rearrangement of elements in a multi-domain
follows essentially the same elements transfer procedure,
as developed for a two-domain reshaping. It is actually
performed as a multi-step operation, solving at each step a
sequence of respective two-domain reshaping problems. In
order to transform the multi-domain reshaping problem to a
two-domain reshaping problem (or a sequence of them)
the same strategy, as used by the METIS program in the
domain decomposition, is applied. There, the recursive
bisection method is applied to partition the domain V into
Ns subdomains Vs; according to the respective shares of
elements. Any subdomain VðjÞi ; arrived at after the jth
bisection step, but not reduced yet to a single subdomain
from the Vs set, is subject to further division in two
subdomains, respecting the element shares as resulting from
the respective subdomains structures. The evolution of the
partitioning process, following the described approach, can
be symbolically resumed by
V ¼ Vð1Þ1 <V
ð1Þ2 ¼ ðV
ð2Þ1 <V
ð2Þ2 Þ< ðV
ð2Þ3 <V
ð2Þ4 Þ
¼ ððVð3Þ1 <V
ð3Þ2 Þ< ðV
ð3Þ3 <V
ð3Þ4 ÞÞ< ððV
ð3Þ5 <V
ð3Þ6 Þ
< ðVð3Þ7 <V
ð3Þ8 ÞÞ
¼ · · · ¼ ðð· · ·ððV1 <V2Þ< · · · < ðVNm21
<VNmÞÞ· · ·Þ< ð· · ·ððVNmþ1 <VNmþ2Þ< · · ·
< ðVNs21 <VNsÞÞ· · ·ÞÞ ð20Þ
with Nm defined as Nm ¼ intðNs=2Þ:
The same evolution path, as established by partitioning
of the domain V, will be followed in the procedure of
rearrangement of elements in a multi-domain. First, the
subdomains Vs ðs ¼ 1;…;NmÞ and subdomains Vs ðs ¼
Nm þ 1;…;NsÞ; with respective surplus/deficit elements
Des; are merged to yield two subdomains, Vð1Þ1 and V
ð1Þ2 ;
respectively. The respective surplus/deficit elements Deð1Þ1
and Deð1Þ2 are given by
XNm
s¼1
Des ¼ Deð1Þ1 ;
XNs
s¼Nmþ1
Des ¼ Deð1Þ2 ) Deð1Þ1 þ Deð1Þ2 ¼ 0
ð21Þ
If Deð1Þ1 – 0; rearrangement of elements between the two
subdomains is needed, which is performed as described in
Fig. 9. Undesirable division of the surplus subdomain.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201 197

Section 5.3. The reshaping of the subdomains Vð1Þ1 and V
ð1Þ2
results in the subdomains ~Vð1Þ1 and ~Vð1Þ
2 ; with respective
numbers of elements ~eð1Þ1 ¼ eð1Þ1 þ Deð1Þ1 and ~e
ð1Þ2 ¼ eð1Þ2 þ
Deð1Þ2 ; and no surplus/deficit element ðD~eð1Þ1 ¼ D~eð1Þ2 ¼ 0Þ:
As a consequence of the performed subdomains Vð1Þ1 and
Vð1Þ2 reshaping, the subdomains Vs ðs ¼ 1;…NmÞ and
subdomains Vs ðs ¼ Nm þ 1;…;NsÞ are correspondingly
reshaped as well, yielding the subdomains ð1ÞVs ðs ¼
1;…;NsÞ: Because of the performed reshaping, the respect-
ive surplus/deficit elements Des; that were characterizing the
subdomains Vs ðs ¼ 1;…;NsÞ before the reshaping, are
correspondingly changed to Dð1Þes; but now fulfilling the
identities
XNm
s¼1
Dð1Þes ¼ 0;XNs
s¼Nmþ1
Dð1Þes ¼ 0 ð22Þ
The elements rearrangement process can be moved now to
the next level, in which the described rearrangement
procedure is performed separately and independently of
each other for the subdomains ~Vð1Þ1 and ~Vð1Þ
2 : Thus, the set of
subdomains ð1ÞVs ðs ¼ 1;…;NmÞ; incorporated in ~Vð1Þ1 ; is
correspondingly halved and respective subdomains
merged to yield two subdomains Vð2Þ1 and V
ð2Þ2 ; with
respective surplus/deficit elements Deð2Þ1 and Deð2Þ2 demand-
ing for the subdomains reshaping. Similarly, from the set of
subdomains ð1ÞVs ðs ¼ Nm þ 1;…;NsÞ; incorporated in ~Vð1Þ2 ;
the subdomains Vð2Þ3 and V
ð2Þ4 ; with respective surplus/deficit
elements Deð2Þ3 and Deð2Þ4 ; are obtained. The respective
reshapings of the two subdomains couples Vð2Þ1 –Vð2Þ
2 and
Vð2Þ3 –Vð2Þ
4 yield the subdomains ~Vð2Þ1 ; ~Vð2Þ
2 and ~Vð2Þ3 ; ~Vð2Þ
4 ;
with no surplus/deficit elements ðD~eð2Þ1 ¼ D~e
ð2Þ2 ¼ D~e
ð2Þ3 ¼
D~eð2Þ4 ¼ 0Þ: The respective subdomains ð1ÞVs are corre-
spondingly reshaped in the subdomain ð2ÞVs; demonstrating
Dð2Þes surplus/deficit elements. The described procedure can
be repeated, following the structure Eq. (20), until complete
fulfilment of the required element shares on the subdomains
Vs ðs ¼ 1;…;NsÞ level.
At the end, to demonstrate the general property of
the developed rearrangement algorithm—interface
smoothing and interface nodes minimization, a simple
problem is considered. When a square domain, regularly
meshed by (100 £ 100) elements, is partitioned by the
METIS program in six subdomains of the required
share (shEl1¼ shEl2
¼ shEl3¼ shEl4
¼ 0:167 and
shEl5¼ shEl6
¼ 0:166), subdomains, with a respective lay-
out as displayed in Fig. 10(a), are obtained.
Though the decomposition is performed in the sense of
minimizing the number of interface nodes, it is evident, that
the achieved number of interface nodes is not optimal. By
applying our rearrangement algorithm, however, after
execution of several reshaping of those subdomains
enforced by imposition of artificially created surplus/deficit
elements, but ending finally at the initial required shares
shEl1; shEl2
;… the subdomains layout, as displayed in
Fig. 10(b), is obtained. This layout is definitely optimal,
which proves the quality of our algorithm.
5.5. Load balancing of the square domain
Testing of computational conformity of the developed
algorithm for the rearrangement of elements, as the key
factor in load balancing, was performed on the steady state
heat transfer analysis case of the square domain in Fig. 3.
Parallel computations were performed on the same
computer system as used in the investigations of structured
domain decomposition. The respective notations introduced
there still apply, therefore, only NElsand NDEls
need be
clarified. NElsand NDEls
are the number of elements and the
number of surplus/deficit elements in each subdomain,
respectively. The respective results of the load balancing,
performed as before on the slave level, are tabulated in
Table 8.
The (300 £ 250) elements square domain was initially
partitioned into six equally sized subdomains by the METIS
program considering free domain decomposition. Actually,
the demanded shares of elements were for the first four
subdomains 0.167, and for the last two 0.166, respectively,
which was accomplished rather satisfactorily by the METIS
program. As it can be seen from Table 8, the subdomains V3
Fig. 10. Demonstration of interface smoothing and interface nodes minimization property of the developed algorithm.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201198

Table 8
Load balancing of square domain partitioned into six subdomains
Iter Vs ! Sc NElsNes
NPFsNIs
�NBWstSls
½s� NDEls
0 V1, S5 12,490 12,362 1,918,231 230 155 1.75 22,648
V2, S4 12,599 12,477 1,984,182 237 159 1.79 22,476
V3, S1 12,631 12,473 3,691,794 404 295 5.31 3,344
V4, S6 12,385 12,261 1,953,792 237 159 2.78 639
V5, S3 12,449 12,312 1,996,895 240 162 1.88 22,028
V6, S2 12,446 12,305 3,471,697 378 282 5.09 3,169
devðtSlÞ (%) 100.68
1 V1, S5 15,138 15,006 2,504,478 250 166 2.61 279
V2, S4 15,075 14,943 2,484,410 248 166 2.52 2354
V3, S1 9,287 9,153 2,471,705 338 270 3.30 921
V4, S6 11,746 11,627 1,787,372 232 153 2.50 2325
V5, S3 14,477 14,358 2,337,727 243 162 2.24 21,286
V6, S2 9,277 9,139 2,416,896 343 264 3.49 1,123
devðtSlÞ (%) 43.37
2 V1, S5 15,217 15,086 2,500,464 249 165 2.51 2570
V2, S4 15,429 15,299 2,569,331 250 167 2.65 2137
V3, S1 8,366 8,234 2,171,144 329 263 2.85 211
V4, S6 12,071 11,951 1,845,611 234 154 2.59 2249
V5, S3 15,763 15,642 2,657,118 254 169 2.85 422
V6, S2 8,154 8,020 2,057,456 326 256 2.93 323
devðtSlÞ (%) 15.46
3 V1, S5 15,787 15,655 2,661,782 255 170 2.91 474
V2, S4 15,566 15,433 2,614,834 252 169 2.75 43
V3, S1 8,155 8,022 2,139,848 329 266 2.86 178
V4, S6 12,320 12,201 1,907,414 232 156 2.67 2149
V5, S3 15,341 15,223 2,527,548 250 166 2.52 2652
V6, S2 7,831 7,699 1,980,058 322 257 2.81 105
devðtSlÞ (%) 14.34
4 V1, S5 15,312 15,181 2,548,529 250 167 2.65 2363
V2, S4 15,523 15,394 2,585,794 251 167 2.69 2248
V3, S1 7,977 7,847 2,050,285 323 261 2.66 2174
V4, S6 12,469 12,349 1,945,402 233 157 2.74 282
V5, S3 15,993 15,871 2,709,616 256 170 3.06 741
V6, S2 7,726 7,592 1,988,878 325 261 2.87 126
devðtSlÞ (%) 14.34
5 V1, S5 15,675 15,543 2,642,529 253 170 2.84 325
V2, S4 15,771 15,638 2,659,097 254 170 2.86 380
V3, S1 8,151 8,018 2,144,592 329 267 2.84 169
V4, S6 12,551 12,432 1,920,845 232 154 2.68 2100
V5, S3 15,252 15,134 2,510,315 249 165 2.52 2610
V6, S2 7,600 7,468 1,891,993 323 253 2.61 2163
devðtSlÞ (%) 12.62
6 V1, S5 15,351 15,221 2,536,140 250 166 2.62 2340
V2, S4 15,391 15,261 2,557,027 251 167 2.65 2250
V3, S1 7,982 7,852 2,052,093 323 261 2.65 2130
V4, S6 12,651 12,530 1,993,434 235 159 2.82 187
V5, S3 15,862 15,740 2,672,029 255 169 2.85 315
V6, S2 7,763 7,629 2,007,068 326 263 2.90 218
devðtSlÞ (%) 10.13
7 V1, S5 15,691 15,560 2,630,145 252 169 2.80 69
V2, S4 15,641 15,508 2,628,058 253 169 2.77 20
V3, S1 8,112 7,979 2,125,741 329 266 2.81 68
V4, S6 12,464 12,345 1,939,155 232 157 2.72 260
V5, S3 15,547 15,428 2,610,970 252 169 2.73 293
V6, S2 7,545 7,413 1,928,996 322 260 2.76 24
devðtSlÞ (%) 3.25
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201 199

and V6 have more interface nodes than other subdomains,
therefore, we allocated the most powerful computers (S1 and
S2) to them. As expected, due to heterogeneity of the
distributed system, the computing times tSlswere not load
balanced. By applying in continuation of the computational
analysis, load balancing according to the developed
algorithm implemented by our element transfer algorithm,
the load balance between the subdomains were achieved in
seven iterations.
6. Conclusion
Several issues regarding parallel computations on a
system of heterogeneous distributed computers were
addressed in the paper, the parallelization being performed
upon domain decomposition approach and finite element
substructuring method.
Despite performing different standard benchmarks to
characterize the computational performance of hetero-
geneous components, this proved, though qualitatively
correct, insufficient for realistic characterization, in particu-
lar, with respect to large finite element systems considered.
By analysing structure of the substructuring method and
revealing the most influential parameters affecting the speed
of computation, we arrived at the conclusion to develop
specific self-adjusting algorithms to cope with the problem,
irrespectively of the problem size and heterogeneity of the
computer system.
To optimize the computational performance in parallel
by even distribution of the work among the processors,
proper load balancing is needed. A load balancing
algorithm, based on the assumption of preserving the
speed of computation in the consecutive iterations, is
developed. Irrespective of the subdomains size and
processors performance, it can determine upon computing
times realized in the previous computing step, shares needed
for a balanced computation. The efficiency of the algorithm
is first demonstrated on cases allowing structured domain
decomposition. When using the algorithm in relation to free
domain decomposition, based on the use of the partitioning
METIS program, several deficiencies of the latter tend to
spoil the efficiency of the developed load balancing
algorithm. Therefore, an algorithm for reshaping of the
existing subdomains in accordance with the required shares
is developed. The rearrangement of elements between
subdomains is performed in a way that assumptions used
in the derivation of the load balancing algorithm are
respected as much as possible. This includes above all
smooth shape variations and minimization of the respective
interface nodes.
Considering the majority of non-linear solvers contain-
ing a linear solution step presenting almost always the
predominant source of CPU time consumption, the used
approach and the algorithms developed cope quite well also
with this class of problems. In fact, when the whole
investigated domain is subject to non-linear effects, such as
in metal forming processes that are characterized by large
plastic deformation through the entire domain, it is not
expected that computational efficiency in parallel would be
spoiled considerably, namely, the load balancing, which
relies on the time needed for the formation of the respective
subproblem matrices and corresponding computations prior
to the solution of the interface problem, will perform quite
well in computations where a small number of iterations is
needed to attain convergence within an incremental step.
The eventual increase of the number of iterations would
definitely spoil the computational efficiency in parallel to
what extent it depends on the properties of the considered
problem. In such cases, if appropriate, the basis on which
the load balance is performed can be changed at will, which
again can be successfully covered by the same developed
algorithms. If, on the contrary, only a minor subdomain is
characterized by a non-linear response, such as in elasto-
plastic problems with only a part of the whole domain being
plastically deformed, this definitely causes the components
allocated to the subdomains exhibiting elastic behaviour to
be idle, while components performing the needed recalcula-
tions on the plastic subdomains being busy. Eventual
temptations to rearrange the established domain decompo-
sition are not justified since they would spoil the
performance of that part of the computation, i.e. the system
of equations solution, which is timely dominant.
Both developed algorithms enable efficient parallel
computing on heterogeneous distributed systems. Also, it
is not necessary to know the performance characteristics of
the new added computers to the existing distributed system,
because the load balancing algorithm adapts the allocated
work to the disposable computational power directly during
the computation.
References
[1] Bittnar Z, Kruis J, Nemecek J, Patzak B, Rypl D. Parallel and
distributed computations for structural mechanics: a review. In:
Topping B, editor. Civil and structural engineering computing.
Stirling, UK: Civil-Comp Press; 2001.
[2] Keyes DE. Domain decomposition in the mainstream of compu-
tational science. Proceedings of the 14th International Conference on
Domain Decomposition Methods in Cocoyoc, Mexico; 2002.
[3] Doltsinis IS, Nolting S. Generation and decomposition of finite
element models for parallel computations. Comput Syst Engng 1991;
2(5/6):427–49.
[4] Farhat C, Wilson E, Powell G. Solution of finite element systems on
concurrent processing computers. Engng Comput 1987;2(3):157–65.
[5] Kocak S, Akay H. Parallel Schur complement method for large-scale
systems on distributed memory computers. Appl Math Modell 2001;
25:873–86.
[6] Roux F, Farhat C. Parallel implementation on the two-level FETI
method. Proceedings of the 11th International Conference on Domain
Decomposition Methods in Greenwich, England; 1998.
[7] Hribersek M, Kuhn G. Domain decomposition methods for conjugate
heat transfer computations by BEM. Fifth World Congress on
Computational Mechanics, Vienna, Austria; 2002.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201200

[8] Khan AI, Topping BHV. Parallel finite element analysis using Jacobi-
conditioned conjugate gradient algorithm. Adv Engng Software 1996;
25:309–19.
[9] Silva LM. Number-crunching with Java applications. Proc Int Conf
Parallel Distrib Process Tech Appl 1998;379–85.
[10] Labriaga R, Williams D. A load balancing technique for hetero-
geneous distributed networks. Proceedings of the International
Conference on Parallel and Distributed Processing Techniques and
Applications; 2000.
[11] Bohn CA, Lamont GB. Load balancing for heterogeneous clusters of
PCs. Future Gener Comput Syst 2002;18:389–400.
[12] Darcan O, Kaylan R. Load balanced implementation of standard clock
method. Simul Practice Theor 2000;8:177–99.
[13] Diekmann R, Preis R, Schlimbach F, Walshaw C. Shape-optimized
mesh partitioning and load balancing for parallel adaptive FEM.
Parallel Comput 2000;26:1555–81.
[14] Decker T, Luling R, Tschoke S. A distributed load balancing
algorithm for heterogeneous parallel computing system. Proc Int
Conf Parallel Distrib Process Tech Appl 1998;933–40.
[15] Lingen FJ. A versatile load balancing framework for parallel
applications based on domain decomposition. Int J Numer Meth
Engng 2000;49:1431–54.
[16] Karypis G, Kumar V. A software package for partitioning unstruc-
tured graphs, partitioning meshes, and computing fill-reducing
orderings of sparse matrices. University of Minnesota, Department
of Computer Science/Army HPC Research Center Minneapolis; 1998.
URL: http://www.cs.umn.edu/~karypis.
[17] Geist A, Beguelin A, Dongarra J, Jiang W, Manchek R, Sunderam V.
PVM: parallel virtual machine, a users’ guide and tutorial for
networked parallel computing. Cambridge: The MIT Press; 1994.
[18] Double Precision Whetstone, ORNL. URL: http://www.netlib.org/
benchmark/whetstoned.
[19] Dongarra J. Performance of various computers using standard linear
equations software in a Fortran environment, ORNL, update
periodically. URL: http://www.netlib.org/benchmark/performance.ps.
[20] Gustafson JL, Snell QO. HINT: a new way to measure computer
performance, scalable computing laboratory, Ames Laboratory. URL:
http://www.scl.ameslab.gov/Projects/HINT/index.html.
P. Rus et al. / Advances in Engineering Software 34 (2003) 185–201 201