parallel computing of fluid structure interactions...
TRANSCRIPT

PARALLEL COMPUTING PARALLEL COMPUTING OF OF
FLUID STRUCTURE INTERACTIONS PROBLEMS FLUID STRUCTURE INTERACTIONS PROBLEMS
Amit S. BaddiNovember 28, 2005
Advisor: Prof. Hasan U. Akay
Department of Mechanical EngineeringComputational Fluid Dynamics Laboratory
Indiana University Purdue University Indianapolis
MS Thesis Defenseovember 28, 2005
OutlineOutline
Introduction to Fluid-Structure Interactions i.e. Aeroelasticity
Algorithmic details of Loosely coupled approach for Aeroelastic flutter predictions
Results Validation and comparisons
Preconditioning formulation
Large scale computations on grid computing environments
Conclusions
Acknowledgements
MS Thesis Defenseovember 28, 2005
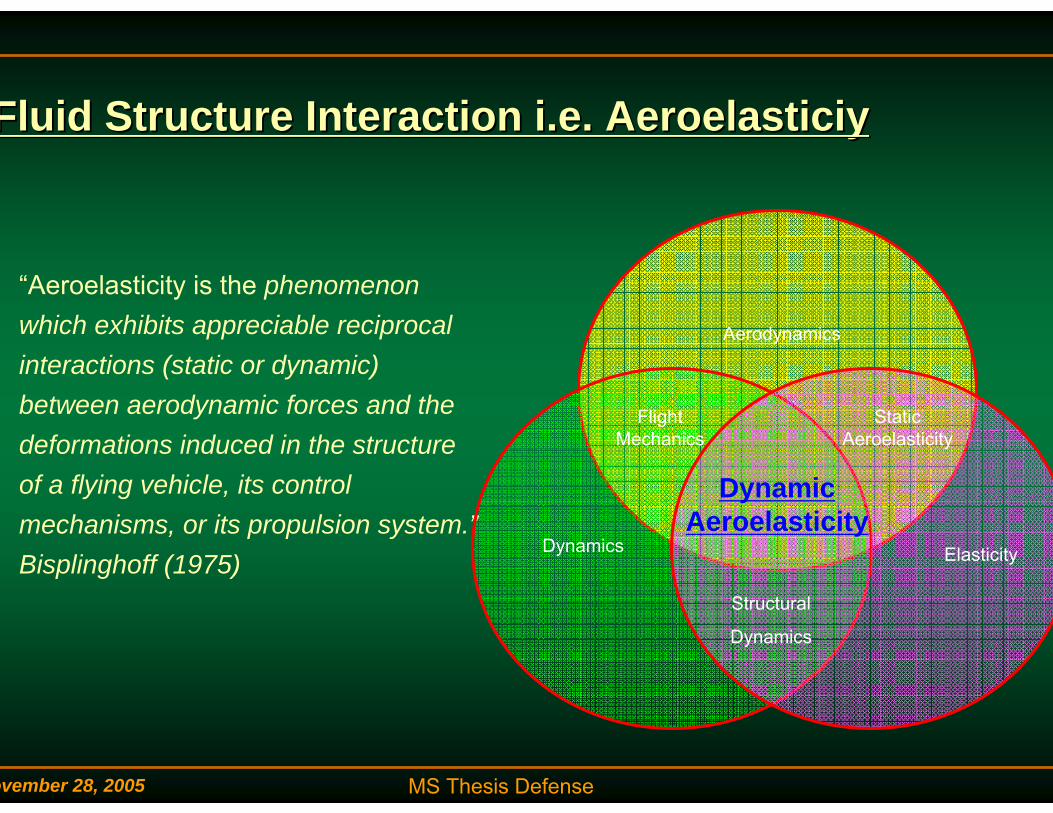
Fluid Structure Interaction i.e. Fluid Structure Interaction i.e. AeroelasticiyAeroelasticiy
“Aeroelasticity is the phenomenon which exhibits appreciable reciprocal interactions (static or dynamic) between aerodynamic forces and the deformations induced in the structure of a flying vehicle, its control mechanisms, or its propulsion system.”Bisplinghoff (1975)
Aerodynamics
Flight Mechanics
Static Aeroelasticity
Dynamics Elasticity
Structural
Dynamics
Dynamic Aeroelasticity

MS Thesis Defenseovember 28, 2005
Aeroelastic Flutter visualAeroelastic Flutter visual

MS Thesis Defenseovember 28, 2005
Work Done in This ThesisWork Done in This Thesis
Mesh based parallel code coupling search and interpolation program was developed coupling the fluid and structure codes.
Multiple Programs Multiple Data (MPMD) paradigm of parallel computing was implemented.
Non-conservative local time stepping was replaced by constant time stepping resulting in improved correlation with the results available in the literature.
Termination criteria in case of mesh movement algorithm was modified resulting in reduced CPU time.
The present density based flow solver was modified to solve for the low speed flows by preconditioning the time derivative term.
Grid computing study was carried out on Teragrid in which multi-site execution was demonstrated.
MS Thesis Defenseovember 28, 2005
FSIEDA FSIEDA
Algorithm DetailsAlgorithm Details

MS Thesis Defenseovember 28, 2005
Calculate dynamic pressure forces on structure
Obtain dynamic response of structure using Newmark-Beta algorithm & mode-superposition
Extract nodal displacements on surface mesh
Solve the flow field using Implicit Euler equations
Extract nodal pressures on the surface mesh
Impose the displacements on CFD surface mesh
Deform CFD volume grid using Mesh movement algorithm
Interpolate pressures between non-similar surface meshes from fluid to structure domain
Interpolate displacements between non-similar surface meshes from structure to fluid domain
CSD Solver (SAPEDA)
Search & Interpolation
(SINEDA)
CFD Solver (FAPEDA)
Loosely coupled approach for simulating Aeroelastic flutterLoosely coupled approach for simulating Aeroelastic flutter
MS Thesis Defenseovember 28, 2005
Computational Fluid Dynamics Solver Computational Fluid Dynamics Solver -- FAPEDAFAPEDA
Unsteady Euler solverUnstructured tetrahedral gridsArbitrary Lagrangian Eulerian (ALE) formulation Cell centered based Finite Volume spatial discretizationBackward Euler Implicit time integrationsLocal time stepping for Steady state solutions and Time accurate time stepping for Unsteady solutions Moving mesh for solution of moving boundary problems such as Fluid-Structure Interactions, etc.MPI for parallel communication

MS Thesis Defenseovember 28, 2005
Computational Fluid Dynamics Solver Computational Fluid Dynamics Solver -- FAPEDA (Cont.)FAPEDA (Cont.)
Governing Equations for FAPEDAThe integral form of the Arbitrary Lagrangian-Eulerian (ALE) formulation of the 3D
time-dependent inviscid fluid-flow equations:
∫∫∫ ∫∫Ω Ω∂
=⋅+∂∂ 0ˆdSnFQdVt
r
∫∫ ∫∫Ω Ω∂
=⋅+ 0ˆ dSnFdVQr
TEwvuQ ρρρρ=where, is the vector of conserved flow variables
( )[ ]
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+⋅−
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+
==⋅
n
z
y
x
n
annn
Pnwu
pewvu
FnF
0
ˆˆ vvv
ρρρρ
is the convective flux vector with ALE formulation
MS Thesis Defenseovember 28, 2005
Computational Fluid Dynamics Solver Computational Fluid Dynamics Solver -- FAPEDA (Cont.)FAPEDA (Cont.)
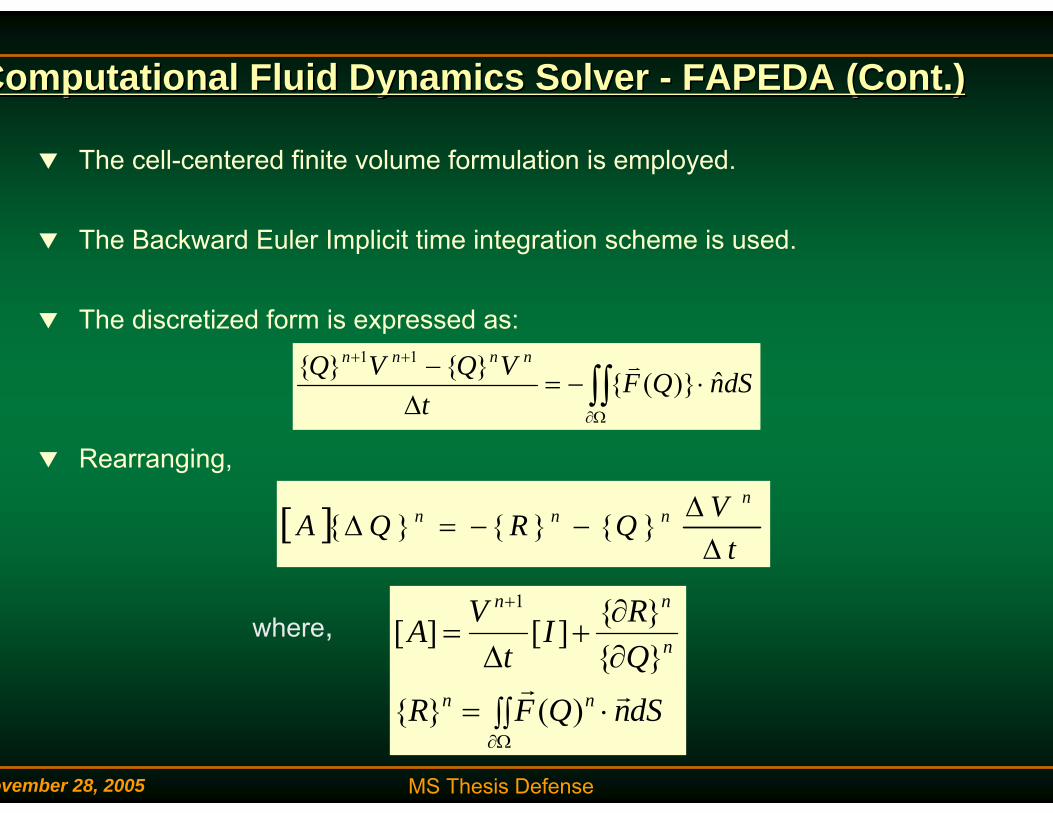
The cell-centered finite volume formulation is employed.
The Backward Euler Implicit time integration scheme is used.
The discretized form is expressed as:
[ ]t
VQRQAn
nnn
∆∆
−−=∆
dSnQFR
QRI
tVA
nn
n
nn
∫∫ ⋅=
∂∂
+∆
=
Ω∂
+
rr)(
][][
1
∫∫Ω∂
++
⋅−=∆− dSnQFt
VQVQ nnnn
ˆ)( 11 v
where,
Rearranging,
MS Thesis Defenseovember 28, 2005
Computational Fluid Dynamics Solver Computational Fluid Dynamics Solver -- FAPEDA (Cont.)FAPEDA (Cont.)
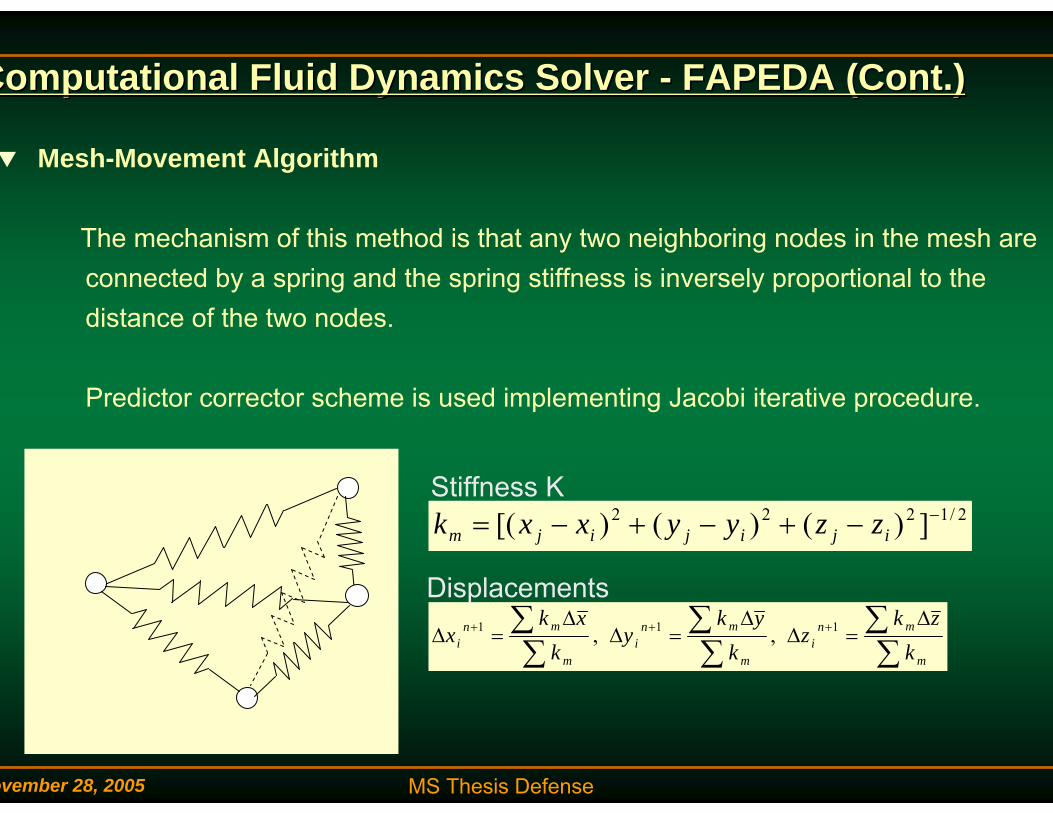
Mesh-Movement Algorithm
The mechanism of this method is that any two neighboring nodes in the mesh are connected by a spring and the spring stiffness is inversely proportional to the distance of the two nodes.
Predictor corrector scheme is used implementing Jacobi iterative procedure.
2/1222 ])()()[( −−+−+−= ijijijm zzyyxxk
∑∑
∑∑
∑∑ ∆
=∆∆
=∆∆
=∆ +++
m
mni
m
mni
m
mni k
zkz
kyk
yk
xkx 111 ,,
Stiffness K
Displacements
MS Thesis Defenseovember 28, 2005
Computational Fluid Dynamics Solver omputational Fluid Dynamics Solver -- FAPEDA (Cont.)FAPEDA (Cont.)
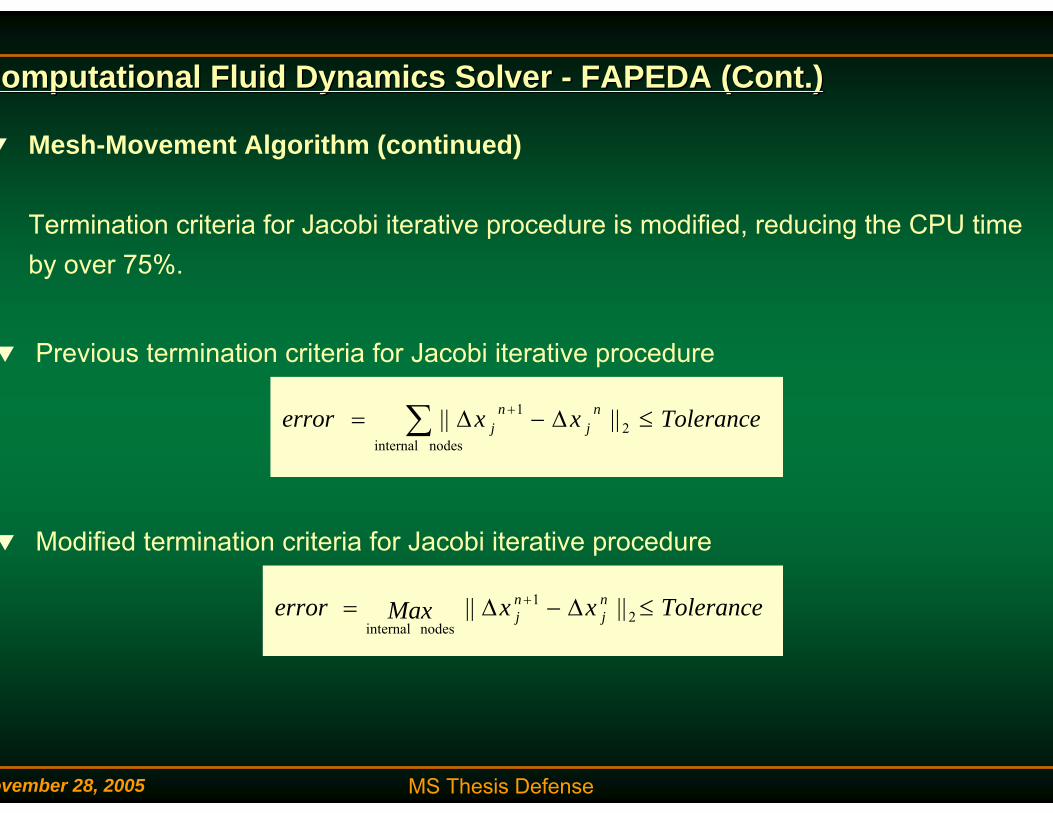
Mesh-Movement Algorithm (continued)
Termination criteria for Jacobi iterative procedure is modified, reducing the CPU time by over 75%.
Tolerancexxerror nj
nj ≤∆−∆= ∑ +
nodes internal2
1 ||||
TolerancexxMaxerror nj
nj ≤∆−∆= +
21
nodes internal||||
Previous termination criteria for Jacobi iterative procedure
Modified termination criteria for Jacobi iterative procedure
MS Thesis Defenseovember 28, 2005
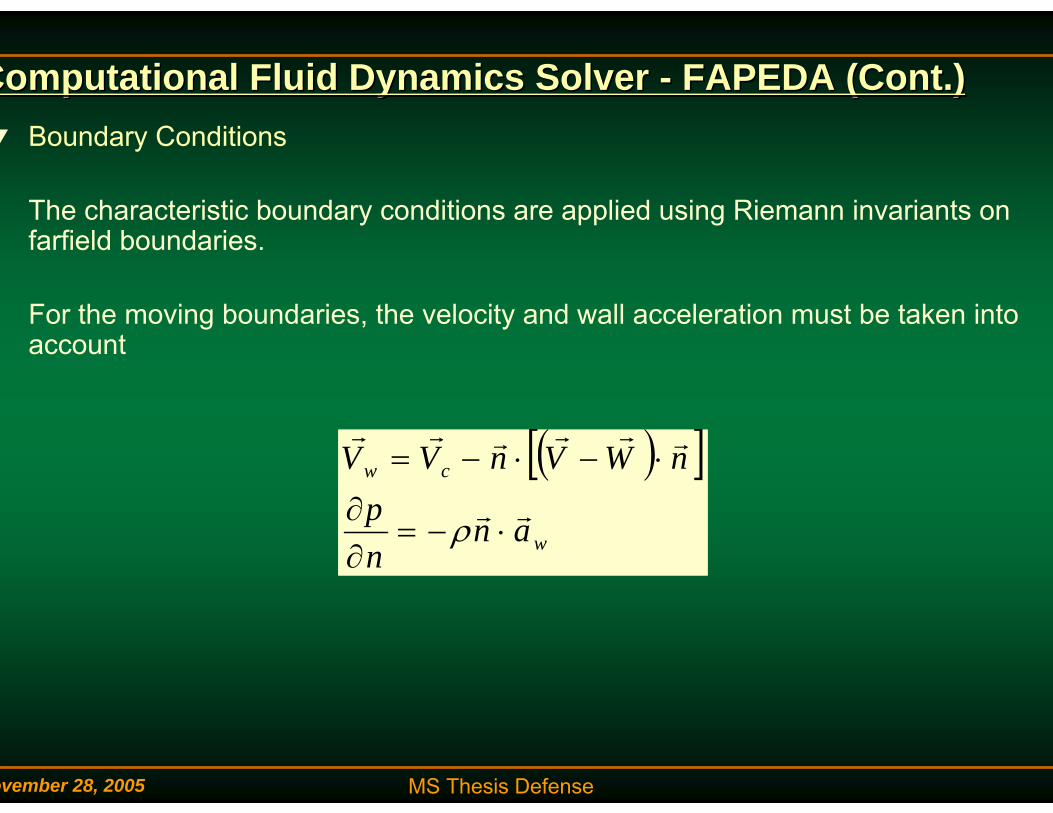
Computational Fluid Dynamics Solver Computational Fluid Dynamics Solver -- FAPEDA (Cont.)FAPEDA (Cont.)Boundary Conditions
The characteristic boundary conditions are applied using Riemann invariants on farfield boundaries.
For the moving boundaries, the velocity and wall acceleration must be taken into account
( )[ ]w
cw
annp
nWVnVVrr
rrrrrr
⋅−=∂∂
⋅−⋅−=
ρ

MS Thesis Defenseovember 28, 2005
Calculate dynamic pressure forces on structure
Obtain dynamic response of structure using Newmark-Beta algorithm & mode-superposition
Extract nodal displacements on surface mesh
Solve the flow field using Implicit Euler equations
Extract nodal pressures on the surface mesh
Impose the displacements on CFD surface mesh
Deform CFD volume grid using Mesh movement algorithm
Interpolate pressures between non-similar surface meshes from fluid to structure domain
Interpolate displacements between non-similar surface meshes from structure to fluid domain
CSD Solver (SAPEDA)
Search & Interpolation
(SINEDA)
CFD Solver (FAPEDA)
Loosely coupled approach for simulating Aeroelastic flutterLoosely coupled approach for simulating Aeroelastic flutter

MS Thesis Defenseovember 28, 2005
Finite element based dynamic structural solver
Quadrilateral shell elements used
Mode super-positioning is used to obtain the dynamic response of the structure
Newmark family of time integration used
Computational Structural Dynamics Solver Computational Structural Dynamics Solver –– SAPEDASAPEDA
MS Thesis Defenseovember 28, 2005
Computational Structural Dynamics Solver Computational Structural Dynamics Solver –– SAPEDASAPEDA
The finite element discrete aeroelasticity element equation for a structural system can be written as
[ ] [ ] [ ] )()()()()()()( eeeeeee RqKqCqM =++ &&&
[M], [C] and [K] are system mass, damping and stiffness matrices
For static analysis, equation can be rewritten as
[ ] RqK =
For dynamic analysis, equation can be rewritten as
[ ] [ ] [ ] )( tRqKqCqM =++ &&&
MS Thesis Defenseovember 28, 2005
Computational Structural Dynamics Solver Computational Structural Dynamics Solver –– SAPEDA (Cont.)SAPEDA (Cont.)
Mode superposition method
][][ 2 φωφ MK =
1. Get the generalized eigenvalue solution
3. Get the generalized displacement solution
*2 2iiiiiii FXXX =++ ωωξ &&&
2. Use first n modes to simulate structural response
)(][)(],......,,[)( 21 tXAtXtq n == φφφ

MS Thesis Defenseovember 28, 2005
Computational Structural Dynamics Solver Computational Structural Dynamics Solver –– SAP4 (Cont.)SAP4 (Cont.)A Newmark-family of time integration scheme is used to obtain the solutionat the (n+1)th time step:
*]])[21(][)21(][1[
]])[221(][)21(][2[][
1***2
***2
1*
FXKCt
Mt
XKCt
Mt
XM
n
nn
+−+−∆−
+∆
−
++−−∆−
−∆
=
−
+
αβα
αβα
Always1/41/2The constant acceleration method
1/61/2The linear acceleration method
Always13/2The backward difference method
Always4/53/2Galerkin method
Stable Condition
βα
i
tω
32≤∆
Initial Condition:
For Flutter Analysis
Either or
00
00
XdtdX
XX
t
t
&=
=
=
=
0
0
0
0
=
≠
X
X& 0
0
0
0
≠
=
X
X&

MS Thesis Defenseovember 28, 2005
Calculate dynamic pressure forces on structure
Obtain dynamic response of structure using Newmark-Beta algorithm & mode-superposition
Extract nodal displacements on surface mesh
Solve the flow field using Implicit Euler equations
Extract nodal pressures on the surface mesh
Impose the displacements on CFD surface mesh
Deform CFD volume grid using Mesh movement algorithm
Interpolate pressures between non-similar surface meshes from fluid to structure domain
Interpolate displacements between non-similar surface meshes from structure to fluid domain
CSD Solver (SAPEDA)
Search & Interpolation
(SINEDA)
CFD Solver (FAPEDA)
Loosely coupled approach for simulating Aeroelastic flutterLoosely coupled approach for simulating Aeroelastic flutter

MS Thesis Defenseovember 28, 2005
unction of SINEDA: Couple Nonunction of SINEDA: Couple Non--similar meshessimilar meshes
Mesh in coupling region for Simulation Code 1
(FAPEDA)
Mesh in coupling region for Simulation Code 2
(SAPEDA)
Alternate Digital Tree (ADT) Geometric Search Algorithm
&
Bilinear Interpolation Algorithm
Element Type: Triangle
Usually dense meshes
Partitioned into blocks
Unstructured mesh
Element Type: Quadrilateral
Usually Coarse meshes
Unpartitioned
Structured mesh
SINEDAX
Y
Z
Y
Z

MS Thesis Defenseovember 28, 2005
Search & InterpolationSearch & Interpolation-- SINEDASINEDA
Alternating Digital Tree (ADT) based geometric search algorithm
Special Geometric selection criteria incorporating minimum distance and barycentric coordinates
Bilinear interpolations for exchange of variables across non-similar meshes
MPMD paradigm of parallel computing
Based on Message Passing Interface (MPI)

MS Thesis Defenseovember 28, 2005
earch & Interpolationearch & Interpolation-- SINEDA (continued)SINEDA (continued)
Alternating Digital Tree (ADT) generation
A
B
C
Right SonNodeLeft
Son
0A0
A
B
A
Right SonNodeLeft
Son
0B0
2A0
Right SonNodeLeft
Son
0C0
3B0
0A0A B
C
AB
A

MS Thesis Defenseovember 28, 2005
earch & Interpolationearch & Interpolation-- SINEDA (continued)SINEDA (continued)
D
A
B
CE
D
A
B
C
Right SonNodeLeft
Son
0D0
0C0
3B0
2A4
Right SonNodeLeft
Son
0E0
0D0
0C0
3B5
2A4AD
B
C
E
AD
B
C
Alternating Digital Tree (ADT) generation

MS Thesis Defenseovember 28, 2005
X
Y
Z
X
Y
ZX
Y
Z
X
Y
Z
Alternating Digital Tree (ADT) Alternating Digital Tree (ADT) –– SINEDA (SINEDA (contndcontnd.).)
MESHMesh is stored in a form of
Alternating Digital Tree
CFD Mesh
CSD Mesh
CFD Mesh ElementBinary Tree
CSD Mesh Element Binary Tree

MS Thesis Defenseovember 28, 2005
earch & Interpolationearch & Interpolation-- SINEDA (continued)SINEDA (continued)
Alternating Digital Tree (ADT) search
A
B
D
E
F
G
H
a
b
C
X1
X2
E
C D G H
B F X1
X2
X1
A

MS Thesis Defenseovember 28, 2005
earch & Interpolationearch & Interpolation-- SINEDA (continued)SINEDA (continued)
Remote node need not lie exactly on the same plane of the local element.
Geometric selection criteria

MS Thesis Defenseovember 28, 2005
earch & Interpolationearch & Interpolation-- SINEDA (continued)SINEDA (continued)
Geometric selection criteria
Generalized model of a Point and Triangle in 3D space is used.
X
Y
Z
P1
P2
P3
P0
P’0
NP
V1
V2
V3
Remote node is projected onto the element plane.

MS Thesis Defenseovember 28, 2005
earch & Interpolationearch & Interpolation-- SINEDA (continued)SINEDA (continued)
Geometric selection criteria
ToleranceA
Adistdisterror
L
diffi ≤
++=
22 21
X
Z
P1
P2
P3
P0
P’0
NP
V1
V2
V3dist1
dist2
P”0
Y
X

MS Thesis Defenseovember 28, 2005
earch & Interpolationearch & Interpolation-- SINEDA (continued)SINEDA (continued)
ToleranceA
Adistdisterror
L
diffi ≤
++=
22 21
Inclusion of difference of Area term in error criteria is necessary.
ToleranceA
distdistA
dist
ELEL
≤⎥⎦
⎤⎢⎣
⎡ +≈⎥
⎦
⎤⎢⎣
⎡
2
22
1
2 211In case if,

MS Thesis Defenseovember 28, 2005
earch & Interpolationearch & Interpolation-- SINEDA (continued)SINEDA (continued)
But, difference of area is not the sufficient condition.
Inclusion of dist1 and dist2 in error criteria is also necessary.
ToleranceA
Adistdisterror
L
diffi ≤
++=
22 21

MS Thesis Defenseovember 28, 2005
MPMD Paradigm of Parallel Computing MPMD Paradigm of Parallel Computing –– SINEDA (SINEDA (contndcontnd.).)
2
CODE1_WORLD
3(4)
0(1)
1(2)
2(3)
SINEDA_WORLD
0(0)
MPI_WORLD
MPI INTER-COMMUNICATORMPI INTRA-COMMUNICATOR
2
CODE2_WORLD
3(8)
0(5)
1(6)
2(7)
Local Process Rank(Global Process Rank)

MS Thesis Defenseovember 28, 2005
AGARD 445.6 Wing: Pressure Distribution interpolated using SINEDAGARD 445.6 Wing: Pressure Distribution interpolated using SINEDA A
Pressure2.726752.658672.590582.52252.454412.386332.318242.250162.182072.113982.04591.977811.909731.841641.77356

MS Thesis Defenseovember 28, 2005
AGARD 445.6: Displacements interpolated using SINEDA AGARD 445.6: Displacements interpolated using SINEDA
DISP0.00240.00220.00200.00190.00170.00160.00140.00130.00110.00090.00080.00060.00050.00030.0002

MS Thesis Defenseovember 28, 2005
FSIEDA TestcaseFSIEDA Testcase
AGARD445.6 WingAGARD445.6 Wing

MS Thesis Defenseovember 28, 2005
TEST CASETEST CASEAGARD Wing 445.6
1.833 ft
1.208 ft
45O
5.2 ft
X
Y
Z
Tetrahedral CFD Mesh168604 Nodes
1M cells
Quadrilateral CSD Mesh840 Nodes
800 Elements

MS Thesis Defenseovember 28, 2005
AGARD 445.6 WingAGARD 445.6 Wing
Grid convergence study based on steady state results
-0.4
-0.2
0
0.2
0.4
0.6
0 0.2 0.4 0.6 0.8 1
X/C
Cp
2.5M
1M
260K
-0.4
-0.2
0
0.2
0.4
0.6
0.8
0 0.2 0.4 0.6 0.8 1
X/CC
p 2.5M
1M
260K
Coefficient of pressure distribution at M = 0.499 at root chord
Coefficient of pressure distribution at M = 1.141 at root chord

MS Thesis Defenseovember 28, 2005
TEST CASES (Cont.)TEST CASES (Cont.)Flutter Analysis
Stable
Neutral
Unstable
µωαbUV f /∞=
Dynamic instability where-by the system extracts energy from the free stream flow producing a divergent response
The computed flutter characteristics are presented in terms of velocity index Vfwhich is defined as:

MS Thesis Defenseovember 28, 2005
Flutter Analysis (contd.)lutter Analysis (contd.)
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0 0.05 0.1 0.15
TIME (s)
GEN
ERAL
IZED
DI
SPLA
CEM
ENTS
MODE1MODE2MODE3MODE4
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0 0.05 0.1 0.15 0.2 0.25
TIME (s)
GEN
ERA
LIZE
D
DIS
PLA
CEM
ENTS
MODE1
MODE2
MODE3
MODE4
AGARD 445.6 wing M∞ = 0.901 and Vf = 0.35
AF = 0.875
Stable response
AGARD 445.6 wing M∞ = 0.901 and Vf = 0.4
AF = 1.12
Unstable response
(2nd Peak Gen. Disp.)Mode1
(1st Peak Gen. Disp.)Mode1Amplification Factor (AF) =

MS Thesis Defenseovember 28, 2005
inear Interpolation of Amplification Factor:inear Interpolation of Amplification Factor:
Amplification Factor(AF) Vs Dynamic Pressure (DP)
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.3 1.4 1.5 1.6 1.7 1.8 1.9
DP
AF AF
AF is linearly interpolated with Dynamic pressure to obtain Flutter boundary.
Vf = 0.35,DP = 1.396,AF =0.875
DP = 1.615,AF =1
Vf = 0.38
Vf = 0.4,DP = 1.823,
AF =1.12
M∞ = 0.901

MS Thesis Defenseovember 28, 2005
Aeroelastic Flutter Boundary at Aeroelastic Flutter Boundary at M∞ = 0.901= 0.901
-0.02
-0.01
0
0.01
0.02
0 0.05 0.1 0.15 0.2 0.25TIME (s)
GA
NER
ALI
ZED
DIS
PLA
CEM
ENTS
(in)
MODE1MODE2MODE3MODE4
AGARD 445.6 wing M∞ = 0.901 and Vf = 0.38
AF = 1.0
Neutral response (LCO)

MS Thesis Defenseovember 28, 2005
lutter Stability Boundary For AGARD 445.6 Winglutter Stability Boundary For AGARD 445.6 Wing
0
0.2
0.4
0.6
0.8
0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2
Mach number M
Velo
city
Inde
x V
FSIEDAEXPERIMENTALBATINA-Euler[27]BATINA-NS[27]FSIEDA (He)[6]

MS Thesis Defenseovember 28, 2005
reconditioning reconditioning
Introduction
Time-marching schemes in the density based solvers provide good stability and convergence characteristics when solving compressible flows at transonic and supersonic Mach numbers.
At low speeds, however, system stiffness resulting from dissimilar particle and acoustic velocities resulting in large condition number causes convergence rates to deteriorate.
Convergence can be made independent of Mach number by altering the acoustic speeds of the system such that all eigenvalues become of the same order and the condition number is made to approach unity.

MS Thesis Defenseovember 28, 2005
reconditioning Formulation reconditioning Formulation
Governing equations
TTwvupQ =
∫∫∫∫∫Ω∂Ω
=⋅+∀∂∂ 0ˆ dSnFdWt
v
∫∫ =⋅+∫∫∫∂∂
ΓΩ∂
0ˆ dSnFdVQt
v
Integral form of 3D Unsteady ALE based Euler equation of Fluid flow
Preconditioned form of the 3D Unsteady ALE based Euler equation of Fluid flow
where, = Preconditioning matrixΓ= Preconditioned flow variables vector

MS Thesis Defenseovember 28, 2005
reconditioning Formulationreconditioning Formulation
Dual time stepping
To maintain the time accuracy of the equations in case of transient solution dual time stepping is utilized and preconditioning is applied to pseudotime.
∫∫∫∫∫∫∫∫Ω∂Ω
⋅−=∂∂
Γ+∀∂∂ dSnFdVQdWt
ˆv
τ
TewvuW ρρρρ=where, = Conserved flow variable vector
The discretized form is:
[ ] nn
mn
mmmmm
Wt
Wt
RQQW
WR
QW
t ∆∀
+∆∀
−−=∆⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡∂∂
⎥⎦
⎤⎢⎣
⎡∂∂
+Γ∆∀
+⎥⎦
⎤⎢⎣
⎡∂∂
∆∀ +++ 111
τ
1
00,+→
=∴→∆∞→nm
m
WWLHSQmAs

MS Thesis Defenseovember 28, 2005
Application of FSIEDA Application of FSIEDA on on
TeraGrid (TG)TeraGrid (TG)

MS Thesis Defenseovember 28, 2005
NSF TeraGrid Extensible Terascale facilityNSF TeraGrid Extensible Terascale facility ((www.teragrid.orgwww.teragrid.org))
Computation sites
Log-in site (alsoNOC)
TeraGrid sites used in this project:

MS Thesis Defenseovember 28, 2005
2
CFD_WORLD
3(4)
0(1)
1(2)
2(3)
SINEDA_WORLD0(0)
MPI_WORLD
CSD_WORLD
Local Process Rank(Global Process Rank)
0(5)
NCSA SDSC
MultisiteMultisite execution of FSIEDA on TGexecution of FSIEDA on TG

MS Thesis Defenseovember 28, 2005
ConclusionsConclusions
A loosely coupled procedure is developed for prediction of Aeroelastic flutter boundary providing an effective alternative over strongly coupled approach.
ADT based efficient Geometric search and Interpolation program SINEDA is developed for obtaining mesh-based code coupling on non-similar meshes.
Flutter analysis was implemented by choosing initial perturbation of the structural system and examining whether the initial perturbation will decay, grow or maintain neutral conditions to determine the flutter conditions. The results obtained show good correlation with previous works of Batina and experimental results.
The accuracy improvement was obtained especially in the supersonic regime by implementing the constant time stepping over the local time stepping.
The modified termination criteria reduced the CPU time by over 75%.
Preconditioning formulation was developed by modifying the current density based transient Eulersolver with ALE formulation to solve for the low speed i.e. incompressible flows.
Explored the potential application of TeraGrid for solving large scale problems.
Multi-site execution was studied for solving potentially large scale problems utilizing multiple clusters on TeraGrid.

MS Thesis Defenseovember 28, 2005
AcknowledgementsAcknowledgements
Prof. Hasan Akay
Prof. Akin Ecer, Prof. Hsu and Dr. Erdal Oktay
Dr. Erdal Yilmaz and Resat Payli
All the Faculty members and staff of the Mechanical Engineering Department
TeraGrid (www.teragrid.org) access to this project was supported by National Science Foundation (NSF) grant, TG-CTS050003T, under the following programs:
Partnerships for Advanced Computational InfrastructureDistributed Terascale Facility (DTF)Terascale Extensions: Enhancements to the Extensible Terascale Facility