otimizaÇÃo de risers rigidos em...
TRANSCRIPT
SÍNTESE E OTIMIZAÇÃO DE ROTAS DE DUTOS SUBMARINOS
CONSIDERANDO CRITÉRIOS DE ESTABILIDADE HIDRODINÂMICA
Juliana Souza Baioco
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Civil, COPPE, da Universidade Federal do Rio
de Janeiro, como parte dos requisitos necessários
à obtenção do título de Mestre em Engenharia
Civil.
Orientador: Breno Pinheiro Jacob
Rio de Janeiro
Março de 2011

iii
Baioco, Juliana Souza
Síntese e Otimização de Rotas de Dutos Submarinos
considerando Critérios de Estabilidade Hidrodinâmica /
Juliana Souza Baioco. – Rio de Janeiro: UFRJ/COPPE,
2011.
XV, 158 p.: il.; 29,7 cm.
Orientador: Breno Pinheiro Jacob
Dissertação (mestrado) – UFRJ/ COPPE/ Programa de
Engenharia Civil, 2011.
Referencias Bibliográficas: p. 114-115.
1. Dutos Submarinos. 2. Estabilidade Hidrodinâmica
3. Otimização. I. Jacob, Breno Pinheiro. II. Universidade
Federal do Rio de Janeiro, COPPE, Programa de
Engenharia Civil. III. Titulo.

iv
Aos meus pais,
Paulo e Angélica,
e ao meu irmão Thiago.

v
AGRADECIMENTOS
A Deus, por nunca me abandonar e estar sempre por perto quando as
dificuldades aparecem.
Ao professor Breno Pinheiro Jacob e ao professor Carl Horst Albrecht, pela
orientação e motivação, fundamentais no desenvolvimento da dissertação.
A minha família (meu pai Paulo, minha mãe Angélica, meu irmão Thiago e
minha cunhada Mirela) que me apoiou e estive do meu lado incentivando para a
conquista de mais essa etapa.
Aos meus tios (Inês e Marcos) e aos primos (José e João) que me deram suporte
e abrigo durante toda a minha vida acadêmica.
Ao Pedro pelo companheirismo e apoio nos momentos em que as
implementações não davam certo.
Ao Daniel e Marcelo que sempre achavam uma maneira de ajudar na solução
dos meus problemas.
Ao Mauro pelo brainstorming fundamental para o andamento da dissertação.
Aos meus demais colegas de trabalho do LAMCSO: Bruno Jacovazzo, Bruno
Monteiro, Fabrício, Frederick, Aldo, Carolina, Larissa, Elisa, Fábio e demais integrantes
do laboratório.
A Ivete que sempre auxiliou no processo burocrático e ao corpo docente e aos
funcionários do Programa de Engenharia Civil.
Ao CNPq pelo apoio financeiro.
Enfim, agradeço a todos que contribuíram direta ou indiretamente na elaboração
deste trabalho.

vi
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
SÍNTESE E OTIMIZAÇÃO DE ROTAS DE DUTOS SUBMARINOS
CONSIDERANDO CRITÉRIOS DE ESTABILIDADE HIDRODINÂMICA
Juliana Souza Baioco
Março/2011
Orientador: Breno Pinheiro Jacob
Programa: Engenharia Civil
No desenvolvimento de um campo de petróleo é de extrema importância
planejar a rota de dutos submarinos para o escoamento de hidrocarbonetos. O objetivo
deste trabalho consiste em verificar as rotas viáveis, que atendam aos critérios de
estabilidade hidrodinâmica, minimizando custos. Desta forma, pretende-se aplicar
critérios de estabilidade hidrodinâmica em ferramentas computacionais de síntese e
otimização de rota de dutos, empregando algoritmos evolutivos. Serão considerados
recursos para análise e verificação da estabilidade de dutos apoiados em leito marinho,
sujeitos a cargas ambientais hidrostáticas e hidrodinâmicas de corrente e de onda.
Assim, pode-se consolidar uma ferramenta robusta que tem por objetivo reduzir o custo
computacional e minimizar a despesa com a rota de dutos.

vii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
SYNTHESIS AND OPTIMIZATION OF SUBMARINE PIPELINE ROUTES
CONSIDERING ON-BOTTOM STABILITY CRITERIA
Juliana Souza Baioco
March/2011
Advisors: Breno Pinheiro Jacob
Department: Civil Engineering
In offshore field development, is very important to plan the route of submarine
pipelines for the flow of hydrocarbons. The objective of this work is to determine the
feasible routes that attend the on-bottom stability criteria, minimizing costs. Hence,
intend to apply on-bottom stability criteria in computational models for synthesis and
optimization of the pipeline route, using evolutionary algorithms. Resources will be
considered for analysis and verification of the stability of pipelines supported on the
seabed under the action of environmental loads hydrostatic and hydrodynamic current
and wave. Thus, can build a robust tool that aims at reducing the computational cost and
minimize the expense of the pipeline route.

viii
SUMÁRIO
ÍNDICE DE FIGURAS ................................................................................................. XI
ÍNDICE DE TABELAS ............................................................................................... XIV
CAPÍTULO 1 - INTRODUÇÃO ..............................................................................................1
1.1 Contexto e Motivação ................................................................................................. 1
1.2 Objetivo do Trabalho .................................................................................................. 1
1.3 Organização do Texto ................................................................................................. 2
CAPÍTULO 2 - REVISÃO BIBLIOGRÁFICA ..........................................................................4
2.1 Otimização de Rota de Dutos ..................................................................................... 4
2.2 Estabilidade Hidrodinâmica de Dutos Submarinos .................................................... 4
2.3 Comparação de Diretrizes de Estabilidade Hidrodinâmica de Dutos ......................... 5
2.3.1 PRCI ................................................................................................................ 5
2.3.2 VERITEC RP-E305 .......................................................................................... 6
2.3.3 DNV RP-F109 .................................................................................................. 7
CAPÍTULO 3 - PROJETO DE DUTOS SUBMARINOS ............................................................9
3.1 Configuração de Dutos Submarinos ......................................................................... 11
CAPÍTULO 4 - METODOLOGIA DE OTIMIZAÇÃO ............................................................14
4.1 Processo de Otimização ............................................................................................ 14
4.2 Algoritmos Genéticos (AG) ...................................................................................... 15
4.2.1 Conceitos Básicos .......................................................................................... 16
4.2.2 População e Avaliação .................................................................................. 18
4.2.3 Seleção ........................................................................................................... 19
4.2.4 Cruzamento .................................................................................................... 20
4.2.5 Mutação ......................................................................................................... 23
4.2.6 Sobrevivência ................................................................................................. 24
4.2.7 Critério de Parada ......................................................................................... 25
CAPÍTULO 5 - DESCRIÇÃO DO PROBLEMA .....................................................................27
5.1 Representação da Rota do Duto Submarino ............................................................. 27
5.1.1 Formulação Matemática ................................................................................ 29
5.1.2 Codificação da Rota ...................................................................................... 31
5.2 Função Objetivo........................................................................................................ 32
5.3 Restrições do Problema ............................................................................................ 33
5.3.1 Cruzamento do duto sobre si mesmo ............................................................. 34

ix
5.3.2 Cruzamento de obstáculo ............................................................................... 35
5.3.3 Comprimento mínimo entre curvas ................................................................ 37
5.3.4 Comprimento mínimo de trecho reto no início e fim da trajetória ................ 37
5.3.5 Declividade .................................................................................................... 37
5.3.6 Critério de raio mínimo de curvatura ............................................................ 39
5.3.7 Critério de estabilidade ................................................................................. 40
CAPÍTULO 6 - ESTABILIDADE DE DUTOS SUBMARINOS .................................................42
6.1 Estabilidade Vertical em Água ................................................................................. 42
6.1.1 Peso submerso do duto .................................................................................. 43
6.2 Estabilidade Estática Absoluta.................................................................................. 44
6.2.1 Característica Ambiental de Onda ................................................................ 46
6.2.2 Característica Ambiental de Corrente ........................................................... 49
6.2.3 Cargas Hidrodinâmicas – Formulação de Morison ...................................... 50
6.2.4 Fatores de Redução de Carga Devido à Interação Solo-Duto ...................... 51
6.2.5 Cargas hidrodinâmicas considerando os fatores de redução ....................... 53
6.2.6 Resistência Passiva do Solo ........................................................................... 56
6.3 Estabilidade Generalizada ........................................................................................ 59
6.3.1 Espectro de JONSWAP .................................................................................. 60
6.3.2 Curvas de Projeto .......................................................................................... 61
6.3.3 Peso Requerido .............................................................................................. 62
6.3.4 Recomendações .............................................................................................. 67
6.4 Formulação dos Fatores de segurança ...................................................................... 67
6.4.1 Fatores de Segurança considerando Declividade ......................................... 68
6.5 Consideração do Peso de Lastro Requerido ............................................................. 69
6.6 Validação e Comparação dos Métodos ..................................................................... 70
6.6.1 Validação da Formulação ............................................................................. 70
6.6.2 Comparação de Modelos de Análise de Estabilidade ................................... 73
CAPÍTULO 7 - ESTUDOS DE CASO ...................................................................................77
7.1 Cenários e Parâmetros do Algoritmo ........................................................................ 77
7.1.1 Cenário .......................................................................................................... 77
7.1.2 Características Físicas e Geométricas do Duto ............................................ 79
7.1.3 Carregamentos Ambientais ............................................................................ 80
7.1.4 Parâmetros do processo de otimização ......................................................... 82
7.2 Otimização com a Estabilidade como Penalidade .................................................... 83
7.2.1 Batimetria Acidentada ................................................................................... 84
7.2.2 Batimetria Suave ............................................................................................ 87
x
7.3 Otimização com a Estabilidade para Determinar o Peso de Lastro .......................... 94
7.3.1 Batimetria Acidentada ................................................................................... 95
7.3.2 Batimetria Suave .......................................................................................... 100
CAPÍTULO 8 - CONCLUSÃO ...........................................................................................112
8.1 Considerações Finais .............................................................................................. 112
8.2 Proposta para Trabalhos Futuros ............................................................................ 112
REFERÊNCIAS BIBLIOGRÁFICAS ...................................................................................114
APÊNDICE A: RESULTADO DETALHADO DA OTIMIZAÇÃO DO PESO DE LASTRO .......116

xi
ÍNDICE DE FIGURAS
Figura 3.1: Arranjo submarinos. Fonte: [11]. ................................................................... 9
Figura 3.2: Esquema representativo do projeto de dutos submarinos. Fonte: [12]
modificada. ..................................................................................................................... 10
Figura 3.3: Seção transversal do duto. Fonte: [9] modificada. ....................................... 12
Figura 3.4: Colchão de concreto. Fonte: [13] modificada. ............................................. 13
Figura 3.5: (a) Enterramento mecânico; (b) Jetting. Fonte: [10] modificada. ................ 13
Figura 4.1: Esquema representativo do Algoritmo Genético básico. ............................. 15
Figura 4.2: Codificação do indivíduo. Fonte: [15] ......................................................... 17
Figura 4.3: Interface AG. ................................................................................................ 18
Figura 4.4: Tamanho da população. ............................................................................... 18
Figura 4.5: Seleção. ........................................................................................................ 19
Figura 4.6: Roleta. Fonte: [15] ....................................................................................... 20
Figura 4.7: Parâmetros do cruzamento. .......................................................................... 21
Figura 4.8: Tipos de cruzamento binário. Fonte: [15] .................................................... 21
Figura 4.9: Crossover real BLX-α. Fonte: [17] .............................................................. 22
Figura 4.10: Parâmetros da mutação. ............................................................................. 23
Figura 4.11: Mutação binária. ........................................................................................ 23
Figura 4.12: Métodos de sobrevivência. ......................................................................... 24
Figura 4.13: Critérios de parada. .................................................................................... 26
Figura 5.1: Representação da parametrização do duto. Fonte: [19] ............................... 28
Figura 5.2: Distribuição de pontos-base sobre a reta AB . Fonte: [19] .......................... 29
Figura 5.3: Definição do PI. Fonte: [19] ........................................................................ 29
Figura 5.4: Cálculo dos pontos sobre a curva. Fonte: [19] ............................................. 30
Figura 5.5: Penalidades do problema de otimização de rota de dutos. ........................... 34
Figura 5.6: Representação de obstáculos. ....................................................................... 36
Figura 5.7: Declividade longitudinal. ............................................................................. 38
Figura 5.8: Declividade transversal. ............................................................................... 39
Figura 5.9: Raio de curvatura. Fonte: [20] ..................................................................... 39
Figura 6.1: Seção Transversal do Duto. Fonte: [9] modificada...................................... 43
Figura 6.2: Forças atuantes no duto. Fonte: [19] modificada. ........................................ 45
Figura 6.3: Desenho esquemático de uma onda regular. Fonte: [19]. ............................ 46
Figura 6.4: Diagrama para obtenção do número de onda k. ........................................... 48

xii
Figura 6.5: Definição dos parâmetros da penetração. Fonte: [2].................................... 52
Figura 6.6: Fator de Redução devido à penetração. Fonte: [2] ....................................... 52
Figura 6.7: Definição dos parâmetros do entrincheiramento. Fonte: [2]........................ 53
Figura 6.8: Fator de redução devido ao entrincheiramento. Fonte: [2] .......................... 53
Figura 6.9: Gráfico relativo ao coeficiente de pico de carga horizontal. Fonte: [2] ....... 55
Figura 6.10: Gráfico relativo ao coeficiente de pico de carga vertical. Fonte: [2] ......... 56
Figura 6.11: Gráfico Relativo à Resistência Passiva do Solo. Fonte: [2] ....................... 57
Figura 6.12: Peso mínimo, Lstable
( )2 + M2 , para dutos em areia. Fonte: [2] ............................ 65
Figura 6.13: Peso mínimo, L10
( )2 + M2 , para dutos em areia. Fonte: [2] ............................ 66
Figura 6.14: Forças Hidrodinâmicas considerando inclinação da batimetria. Fonte: [22]
........................................................................................................................................ 68
Figura 6.15: Fluxograma do cálculo do peso requerido reqW . ........................................ 69
Figura 7.1: Batimetria Acidentada.................................................................................. 78
Figura 7.2: Batimetria Suave. ......................................................................................... 78
Figura 7.3: Configuração da penalidades. ...................................................................... 82
Figura 7.4: Parâmetros do Algoritmo. ............................................................................ 83
Figura 7.5: Critérios de Parada. ...................................................................................... 83
Figura 7.6: Resultado das Rotas associadas à Batimetria Acidentada em Águas
Profundas. ....................................................................................................................... 85
Figura 7.7: Resultado das Rotas associadas à Batimetria Acidentada em Águas
Intermediárias. ................................................................................................................ 86
Figura 7.8: Resultado das Rotas associadas à Batimetria Suave em Águas Profundas. 88
Figura 7.9: Resultado das Rotas associadas à Batimetria Suave em Águas
Intermediárias. ................................................................................................................ 89
Figura 7.10: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas. ..... 90
Figura 7.11: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas sem
Corrente. ......................................................................................................................... 92
Figura 7.12: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas sem
Onda. .............................................................................................................................. 93
Figura 7.13: Resultado da Rota associada à Batimetria Acidentada em Águas
Intermediárias. ................................................................................................................ 95
xiii
Figura 7.14: Resultado da Rota associada à Batimetria Acidentada em Águas
Intermediárias Otimizada pela Estabilidade como Penalidade....................................... 97
Figura 7.15: Resultado da Rota associada à Batimetria Acidentada em Águas
Intermediárias Otimizada pela Estabilidade como Penalidade Desconsiderando a
Espessura de Concreto. ................................................................................................... 99
Figura 7.16: Resultado das Rotas associadas à Batimetria Suave em Águas
Intermediárias. .............................................................................................................. 100
Figura 7.17: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o
Critério Absoluto. ......................................................................................................... 102
Figura 7.18: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o
Critério Generalizado. .................................................................................................. 102
Figura 7.19: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para
10.01
duto
lastro
kk
==
. ................................................................................................................. 104
Figura 7.20: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para
100.01
duto
lastro
kk
==
. ................................................................................................................. 104
Figura 7.21: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para
500.01
duto
lastro
kk
==
. ................................................................................................................. 105
Figura 7.22: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o
Critério Absoluto desconsiderando a Corrente. ............................................................ 106
Figura 7.23: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o
Critério Generalizado desconsiderando a Corrente. ..................................................... 106
Figura 7.24: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas
desconsiderando a Corrente para 10.01
duto
lastro
kk
==
. ............................................................ 108
Figura 7.25: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas
desconsiderando a Corrente para 100.01
duto
lastro
kk
==
. ............................................................ 108
Figura 7.26: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o
Critério Absoluto desconsiderando a Onda. ................................................................. 109

xiv
ÍNDICE DE TABELAS
Tabela 6.1: Rugosidade do solo do leito marinho. Fonte: [2] ........................................ 49
Tabela 6.2: Coeficiente de pico de carga horizontal. Fonte: [2]..................................... 54
Tabela 6.3: Coeficiente de pico de carga vertical. Fonte: [2] ......................................... 55
Tabela 6.4: Peso mínimo, Lstable
( )2 + M2 , para dutos em areia, K ≥ 10 . Fonte: [2] ................ 64
Tabela 6.5: Peso mínimo, Lstable
( )2 + M2 , para dutos em areia, K ≤ 5 . Fonte: [2] .................. 64
Tabela 6.6: Peso mínimo, L10
( )2 + M2 , para dutos em areia. Fonte: [2] .............................. 65
Tabela 6.7: Dados de entrada do modelo de validação. Fonte: [3] ................................ 71
Tabela 6.8: Tabela comparativa entre os resultados do PRCI (em amarelo) e planilha em
Fortran de cálculo de estabilidade absoluta (em rosa). ................................................... 72
Tabela 6.9: Dados de entrada do problema. Fonte: [3] .................................................. 73
Tabela 6.10: Comparação entre os resultados do Critério Absoluto (em verde) e do
Critério Generalizado (em azul) utilizando mar Regular. .............................................. 75
Tabela 6.11: Comparação entre os resultados do Critério Absoluto (em verde) e do
Critério Generalizado (em azul) utilizando mar Irregular. ............................................. 76
Tabela 7.1: Profundidade das extremidades da rota. ...................................................... 79
Tabela 7.2: Propriedades físicas do solo. ....................................................................... 79
Tabela 7.3: Propriedades geométricas do duto. .............................................................. 80
Tabela 7.4: Velocidade da corrente próxima ao leito marinho (m/s). ............................ 81
Tabela 7.5: Parâmetros de onda. ..................................................................................... 82
Tabela 7.6: Tabela Resumo dos Comprimentos Obtidos para o Caso da Batimetria
Acidentada. ..................................................................................................................... 84
Tabela 7.7: Resumo dos Resultados da Batimetria Acidentada para Águas Profundas. 85
Tabela 7.8: Resumo dos Resultados da Batimetria Acidentada para Águas
Intermediárias. ................................................................................................................ 86
Tabela 7.9: Tabela Resumo dos Comprimentos Obtidos para o Caso da Batimetria
Suave. ............................................................................................................................. 88
Tabela 7.10: Resumo dos Resultados da Batimetria Suave para Águas Profundas. ...... 88
Tabela 7.11: Resumo dos Resultados da Batimetria Suave para Águas Intermediárias. 89
Tabela 7.12: Resumo dos Resultados da Batimetria Suave para Águas Rasas. ............. 91

xv
Tabela 7.13: Resumo dos Resultados da Batimetria Suave para Águas Rasas sem
Corrente. ......................................................................................................................... 92
Tabela 7.14: Resumo dos Resultados da Batimetria Suave para Águas Rasas sem Onda.
........................................................................................................................................ 93
Tabela 7.15: Resumo dos Resultados da Batimetria Acidentada para Águas
Intermediárias. ................................................................................................................ 96
Tabela 7.16: Resumo do Resultado da Batimetria Acidentada para Águas Intermediárias
comparando com a Rota Otimizada pela Estabilidade como Penalidade. ...................... 97
Tabela 7.17: Comparação dos Pesos de Lastro Associados a Rota Otimizada pela
Estabilidade como Penalidade. ....................................................................................... 98
Tabela 7.18: Comparação dos Dados Associados a Rota Otimizada pela Estabilidade
como Penalidade. ............................................................................................................ 99
Tabela 7.19: Resumo dos Resultados da Batimetria Suave para Águas Intermediárias.
...................................................................................................................................... 100
Tabela 7.20: Resumo dos Resultados da Batimetria Suave para Águas Rasas. ........... 103
Tabela 7.21: Resumo dos Resultados da Batimetria Suave para Águas Rasas
desconsiderando a Corrente. ......................................................................................... 107
Tabela 7.22: Resumo dos Resultados da Batimetria Suave para Águas Rasas
desconsiderando a Onda. .............................................................................................. 109
Tabela 7.23: Comparação dos Resultados com os Carregamentos Considerados
Isoladamente. ................................................................................................................ 110
Tabela 7.24: Comparação dos Resultados com os Carregamentos Considerados
Isoladamente do Elemento mais Raso. ......................................................................... 111
1
CCaappííttuulloo 11 -- IInnttrroodduuççããoo
1.1 CONTEXTO E MOTIVAÇÃO
Com o avanço da exploração de petróleo e a descoberta de novos campos, a
indústria de petróleo tem sido fomentada, requerendo estudos e soluções práticas para o
desenvolvimento de projetos.
No que tange ao transporte dutoviário do campo de petróleo ao continente, bem
como a conexão entre plataformas, é necessário um projeto de dutos que atenda a um
menor custo, visando às limitações de instalação e tendendo a um mínimo de
intervenções.
Neste sentido, é válida a proposta de síntese e otimização de rotas de dutos
visando atender critérios de estabilidade hidrodinâmica de dutos apoiados em leito
marinho, uma vez que, tradicionalmente, o planejamento da rota é feito manualmente
pelo engenheiro, através da inspeção expedita da batimetria e dos obstáculos. Vale
destacar que eventualmente pode-se efetuar a avaliação de uma determinada rota através
de ferramentas de análise, entretanto ainda sim é um processo dependente da
experiência do projetista.
Desta forma, pretende-se automatizar, na medida do possível, a escolha da rota
mais econômica, atendendo a critérios de estabilidade hidrodinâmica, usando
ferramentas computacionais baseadas em algoritmos evolutivos.
1.2 OBJETIVO DO TRABALHO
O objetivo do trabalho é empregar meta-heurística1 inspirada na natureza para a
otimização de rota de dutos, levando em consideração o comportamento estrutural do
duto, sob ação dos carregamentos hidrostáticos e hidrodinâmicos. Desta forma será
possível não só obter uma configuração com um custo otimizado, como também, obter
isto em um tempo menor de projeto.
1 “Uma meta-heurística é um conjunto de conceitos que pode ser utilizado para definir métodos heurísticos aplicáveis a um extenso conjunto de diferentes problemas. Em outras palavras, uma meta-heurística pode ser vista como uma estrutura algorítmica geral que pode ser aplicada a diferentes problemas de otimização com relativamente poucas modificações que possam adaptá-la a um problema específico. Alguns exemplos de metaheurísticas são: simulated annealing, busca tabu, busca local, algoritmos evolutivos e colônia de formigas.” [1]

2
Para alcançar o objetivo serão aplicados procedimentos de otimização, nos quais
cada configuração de rota gerada deve ser avaliada, para determinar sua aptidão (fitness)
em termos dos critérios incorporados na função-objetivo, que leva em consideração os
aspectos relevantes na escolha de uma rota.
Muitos destes aspectos dependem do comportamento estrutural do duto, sob
ação dos carregamentos ambientais. Assim a avaliação deve ser efetuada através de
ferramentas que determinam a estabilidade de dutos apoiados no leito marinho, tomando
como referência a DNV RP-F109 [2] e recomendações do PRCI [3].
Os critérios de estabilidade, de acordo com a DNV RP-F109 [2], compreendem
a verificação da estabilidade lateral de dutos segundo três metodologias:
i. Estabilidade Estática Absoluta (Absolute Lateral Static Stability): Garante
que as cargas hidrodinâmicas atuantes no duto sejam menores do que a
resistência do solo, não permitindo o deslocamento lateral do duto;
ii. Estabilidade Generalizada (Gener
iii. alized Lateral Stability Method): Permite deslocamentos máximos
admissíveis, analisando o peso requerido para a limitação do movimento
do duto;
iv. Análise Dinâmica de Estabilidade (Dynamic Lateral Stability Analysis):
Calcula o histórico de deslocamentos do duto ao longo do tempo, através
de simulações numéricas.
O presente trabalho visa analisar os critérios de Estabilidade Estática Absoluta e
Estabilidade Generalizada, verificando, a partir de um duto específico, se este atingiu a
estabilidade requerida para a rota definida, bem como a partir do processo de
otimização, calcular o peso de lastro requerido do duto para atingir a estabilidade
hidrodinâmica mínima, otimizando assim a camada de lastro necessária.
1.3 ORGANIZAÇÃO DO TEXTO
O texto da dissertação está organizado da seguinte maneira: No Capítulo 2 -
será apresentada a revisão bibliográfica abordando estudos de otimização aplicados a
rota de dutos, bem como estudos na área de estabilidade de dutos submarinos. O
Capítulo 3 - aborda o conceito de dutos submarinos e como é executado o projeto de
dutos. O Capítulo 4 - apresenta a formulação do algoritmo de otimização utilizado. O
Capítulo 5 - expõe a representação do problema, suas restrições e a função objetivo. O
Capítulo 6 - trata dos critérios de estabilidade, comparando os modelos utilizados e
3
suas formulações, bem como a validação dos critérios de estabilidade. O Capítulo 7 - é
dedicado aos estudos de caso. Por fim, no Capítulo 8 - são trazidas as conclusões da
dissertação assim como as sugestões para trabalhos futuros.

4
CCaappííttuulloo 22 -- RReevviissããoo BBiibblliiooggrrááffiiccaa Equation Chapter (Next) Section 1
2.1 OTIMIZAÇÃO DE ROTA DE DUTOS
A fim de contextualizar e dar embasamento ao trabalho, é necessário verificar o
estado da arte no que tange a otimização das rotas. Desta forma três artigos são
destacados, uma vez que tratam da otimização da rota visando à redução de custos,
sujeita a restrições de operação e instalação.
Em FERNANDES et.al.[4] é apresentado o desenvolvimento de uma função
objetivo associada a algoritmos evolutivos, a qual determina a rota ótima de dutos,
considerando as características do solo, a batimetria e os efeitos devido à instalação do
duto, além das propriedades do duto. Outro fator tratado no artigo é a quantificação e
localização de vãos livres e o raio mínimo de curvatura requerido após instalação. Além
disso, foi feito um estudo de sensibilidade para identificar os pontos críticos de projeto,
objetivando reduzir o custo operacional, bem como evitar erros na interpretação de
rotas, além de minimizar o custo do projeto e da instalação.
Em MEISINGSET et. al. [5], similar ao que é mostrado em FERNANDES et.al.
[4], é apresentado o desenvolvimento de uma ferramenta de otimização de rota de duto,
objetivando encontrar a rota viável de menor custo em termos de material e intervenção.
Outro trabalho correlacionado é o apresentado em VIEIRA et. al. [6], que mostra
a parametrização da rota no tocante da ferramenta de otimização, considerando também
restrições referentes aos obstáculos, à topografia e à geometria da rota, sendo esta
referente basicamente a limitações definidas para lançamento do duto.
2.2 ESTABILIDADE HIDRODINÂMICA DE DUTOS SUBMARINOS
Em paralelo ao estudo de otimização de rota de dutos, vê-se a necessidade de
apresentar algumas referências utilizadas na estabilidade hidrodinâmica de dutos
submarinos. Assim vale destacar duas referências em especial que dão suporte para o
cálculo da estabilidade de dutos apresentado no presente estudo: a recomendação prática
DNV RP-F109 [2] e o manual do PRCI [3].
Em DNV RP-F109 [2] são mostradas algumas recomendações práticas para o
projeto de estabilidade de dutos, no qual aborda diferentes níveis de tolerância de
deslocamentos e seus respectivos fatores de segurança e pesos recomendados

5
associados, bem como propõe um critério que envolve análise dinâmica, na qual se tem
como resposta tensões e deslocamentos ao longo do duto. Em PRCI [3] é apresentado
um guia de análise e projeto de dutos, incluindo modelos para o cálculo das forças
hidrodinâmicas e de interação solo-duto, mostrando o software desenvolvido além de
exemplos práticos.
Adicionalmente, em HALE et. al. [7] os autores fazem uma comparação entre o
manual do PRCI [3] e a recomendação prática VERITEC RP-E305 [8] (anterior a DNV
RP-F109), apresentando similaridades e diferenças entre a abordagem dos métodos.
Mostrando através de resultados que a RP-E305 é, em geral, mais conservadora que o
manual AGA-PRCI.
Outro trabalho que vale destacar é o apresentado em HANIFFAH [9] no qual o
autor mostra estudos de caso para estabilidade de dutos segundo a RP-E305 para
condições de instalação e operação. Além disso, são feitos estudos paramétricos para
avaliar a influência de alguns parâmetros com o peso submerso do duto.
Além de HANIFFAH [9], outro trabalho que realiza estudos paramétricos
considerando estabilidade de dutos é o apresentado em LIMA JUNIOR [10], no qual
são realizados estudos utilizando procedimentos da DNV RP-F109 validados com as
diretrizes do manual PRCI.
2.3 COMPARAÇÃO DE DIRETRIZES DE ESTABILIDADE HIDRODINÂMICA
DE DUTOS
A fim de comparar os métodos de análise de estabilidade de dutos mais comuns
e aceitos na indústria, fez-se uma comparação entre os seguintes guias:
• PRCI [3] - Programa de Estabilidade de Duto (Pipeline Stability Program);
• VERITEC RP-E305 [8];
• DNV RP-F109 [2].
2.3.1 PRCI
O manual PRCI [3] possui três níveis de análise:
• Estático Simplificado (Simplified Static) - Nível 1;
• Quasi-estático Simplificado (Simplified Quasi-Static) - Nível 2;
• Dinâmico no Domínio do Tempo (Dynamic Time Domain) - Nível 3.

6
O Método Estático Simplificado emprega o procedimento tradicional de
equilíbrio de forcas atuantes e resistivas. As forças hidroninâmicas são representadas
pela equação de Morison e as forças resistivas por um fator de fricção solo-duto. Esse
método é normalmente utilizado para a obtenção de um resultado expedito para a
determinação preliminar da estabilidade do duto. Além disso, a redução da força
hidrodinâmica devido à interação solo-duto pode ser utilizada [11].
O Nível 2 é um critério mais sofisticado, no qual o espectro de onda é
transferido para o leito marinho e uma restrição adicional ao movimento do duto, devido
a interação solo-duto, é considerada durante o tempo de análise. Por fim, fatores de
segurança são computados sob condições ambientais extremas [11].
Já no Nível 3, a movimentação do duto é calculada, bem como o histórico de
tensão. Além disso, o fator de segurança é computado ao longo do tempo.
2.3.2 VERITEC RP-E305
A recomendação prática VERITEC RP-E305 [8] aconselha três níveis de
análise:
• Análise de Estabilidade Simplificada (Simplified Stability Analysis);
• Análise de Estabilidade Generalizada (Generalized Stability Analysis);
• Análise Dinâmica (Dynamic Analysis).
A Análise de Estabilidade Simplificada é semelhante ao Nível 1 do manual
PRCI [3]. As diferenças são que os fatores de fricção da areia e da argila são dados e o
fator de ajuste para peso submerso é dado como uma função do número de Keulegan-
Carpenter [11].
A Análise de Estabilidade Generalizada baseia-se na utilização de um conjunto
de parâmetros adimensionais e assume os seguintes aspectos [8], [11]:
• Os deslocamentos laterais são escalados em 10, 20 e 40 vezes o diâmetro
do duto;
• A rugosidade do duto é considerada;
• A resistência do solo devido à penetração sob carregamento cíclico é
incluída;
• Utiliza-se o espectro de onda de JONSWAP;
• Não há redução de forças hidrodinâmicas, devido à interação solo-duto.

7
O método é valido para a seguinte faixa de valores e é usado para dutos de
maiores proporções [8]:
4 400 0.80.7 1.0 ( )0.05 8.0 ( arg )
0.4 (16 )
s
u
KM
G para solo arenosos para solo iloso
D m in
< << << << <
≥
onde K é o número de Keulegan-Carpenter; M é a razão de velocidade corrente-onda; Gs
é o parâmetro de força relacionado à areia; su é a força de cisalhamento da argila; D é o
diâmetro externo do duto.
Por fim, a RP-E305 não fornece um método para a análise dinâmica, tão
somente orienta a respeito de quais aspectos devem ser modelados com maior precisão.
2.3.3 DNV RP-F109
A recomendação DNV RP-F109 [2], assim como sua versão anterior (VERITEC
RP-E305 [8]) recomenda três níveis de análise:
• Estabilidade Estática Absoluta (Absolute Lateral Static Stability);
• Estabilidade Generalizada (Generalized Lateral Stability Method);
• Análise Dinâmica de Estabilidade (Dynamic Lateral Stability Analysis).
A Análise de Estabilidade Absoluta é semelhante à análise de estabilidade
simplificada da recomendação prática VERITEC RP-E305 [8]. As diferenças são que os
coeficientes hidrodinâmicos são calculados em função de K (número de Keulegan-
Carpenter) e M (razão de velocidade corrente-onda) e não mais fixos como na
VERITEC RP-E305 [8]. Adicionalmente o fator de ajuste para peso submerso não é
mais aplicado e a resposta é dada em função de fatores de segurança e não mais em
função do peso submerso requerido do duto.
A Análise de Estabilidade Generalizada também se baseia na utilização de um
conjunto de parâmetros adimensionais e assume os seguintes aspectos [2]:
• Os deslocamentos laterais são escalados em 0.5 e 10 vezes o diâmetro do
duto;
• Utiliza-se o espectro de onda de JONSWAP.
O método é valido para a seguinte faixa de valores e diferentemente da
VERITEC RP-E305 [8], não possui restrição ao diâmetro do duto:

8
1.05 3.0
2.78 ( arg )g
c
SG para solo iloso
< <
<
onde Sg é o peso específico do duto; Gc é o parâmetro de força relacionado à argila.
Além disso, em águas profundas o método generalizado não é recomendado, já
que K pode ser muito pequeno quando comparado ao valor de M, visto que a presença
de corrente acarreta uma grande elevação no valor de M, conduzindo a pesos elevados,
não representando a realidade.
Por fim, a RP-F109, assim como a RP-E305, não fornece um método para a
análise dinâmica, orientando somente a respeito de quais aspectos devem ser
modelados.

9
CCaappííttuulloo 33 -- PPrroojjeettoo ddee DDuuttooss SSuubbmmaarriinnooss
Dutos submarinos são estruturas utilizadas para o transporte de hidrocarbonetos
(Figura 3.1), os quais podem ser aplicados tanto para o transporte entre plataformas,
como para o transporte subsea to shore, no qual o petróleo é transportado desde o poço
até a costa.
Figura 3.1: Arranjo submarinos. Fonte: [11].
Desta forma, a fim de projetar um sistema eficiente e seguro algumas
considerações devem ser feitas (Figura 3.2), a fim de otimizar tanto o número de
intervenções, quanto o custo do empreendimento.

10
Figura 3.2: Esquema representativo do projeto de dutos submarinos. Fonte: [12] modificada.
Assim, para um projeto de duto é necessário conhecer as condições sob as quais
o duto será instalado, bem como as condições operacionais. Para isso é preciso observar
as condições ambientais no qual está inserido, as características do fluido que será
transportado, entre outros fatores.
Além disso, é preciso definir a rota do duto e as características e dimensões do
duto e efetuar a analise estrutural do mesmo.
No dimensionamento de dutos considera-se principalmente, a corrosividade do
fluido transportado, as temperaturas interna e externa e a vazão requerida para o
transporte, de acordo com a produção do poço. Considerando esses fatores determina-se

11
o material, o diâmetro interno e a espessura de parede do duto, assim como o
revestimento anticorrosivo e o isolante.
Já na seleção da rota os fatores que governam a escolha da melhor opção
consideram a profundidade da lâmina d’água, a declividade do fundo, a presença de
vãos livres, o raio mínimo de curvatura, a configuração do campo, no que tange a
presença de poços, dutos e estruturas do arranjo submarino, entre outros.
Tendo a configuração definida, são avaliados os estados limites de
dimensionamento e a análise de instalação. Neste momento analisa-se se o duto não
sofrerá danos estruturais devido às condições em que está submetido e analisa-se a
possibilidade de lançamento do mesmo, caso algum desses critérios não atenda ao
recomendado é necessário rever as características do duto e/ou a definição da rota.
A proposta do presente trabalho tem por objetivo tratar concomitantemente a
análise de estabilidade hidrodinâmica e a definição da rota, otimizando o processo de
forma integrada.
3.1 CONFIGURAÇÃO DE DUTOS SUBMARINOS
Os dutos submarinos são fabricados geralmente em aço e podem ser revestidos
com outros materiais com funções especificas (Figura 3.3):
• Camada de aço: Confere resistência à tubulação, evitando a flambagem e o
colapso;
• Revestimento anticorrosivo interno: Atribui proteção contra corrosão
interna durante a vida útil do duto;
• Revestimento anticorrosivo externo: Confere proteção contra corrosão
externa durante a vida útil do duto, podendo ser auxiliado por uma
proteção catódica através de anodos de sacrifício;
• Revestimento isolante: Atribui proteção térmica;
• Revestimento de concreto: Confere lastro ao duto, evitando sua flutuação
aumentando a estabilidade, além de fornecer proteção mecânica;

12
Figura 3.3: Seção transversal do duto. Fonte: [9] modificada.
Vale destacar que em determinadas condições a utilização da camada de
concreto é dificultada, devido, entre outros fatores, à instalação, uma vez que devido ao
elevado peso do duto é difícil encontrar embarcações que suportem a instalação do
mesmo. Desta forma outros métodos para conferir lastro ao duto são aplicados:
• Colchão de Concreto (Concrete Matress): Adotar um Colchão de Concreto
sobre o tubo revestido apenas com proteção anticorrosiva do tipo,
polipropileno, poliuretano ou outro tipo de proteção. O Colchão de
concreto pode ser instalado também sobre qualquer outro tipo de duto
inclusive aqueles que contêm camada de concreto como lastro, caso haja
algum problema de instabilidade (Figura 3.4);
• Enterramento: Outra forma não é lastrear o duto, mas sim promover sua
estabilidade através do enterramento em determinada cota. Esse
enterramento pode ser feito por escavação mecânica ou Jetting, sendo
que este último lança água em alta pressão sobre o duto para expulsar o
solo criando uma trincheira (Figura 3.5).

13
Figura 3.4: Colchão de concreto. Fonte: [13] modificada.
Figura 3.5: (a) Enterramento mecânico; (b) Jetting. Fonte: [10] modificada.

14
CCaappííttuulloo 44 -- MMeettooddoollooggiiaa ddee OOttiimmiizzaaççããoo Equation Chapter (Next) Section 1 Devido à complexidade de modelar e estruturar problemas reais de engenharia,
em especial o problema de rota de dutos, vê-se a necessidade de otimizar o processo,
alcançando o objetivo em um tempo de projeto reduzido.
No projeto de um campo de petróleo existe a preocupação de maximizar o
desempenho da operação, minimizando os custos, tornando a aplicação de um método
de otimização bastante válida.
O método de otimização pretende encontrar uma solução ótima do problema
dentro de um conjunto de soluções, normalmente sujeitas a restrições. Assim,
algoritmos inspirados na natureza, como os Algoritmos Genéticos2 (AG), são de grande
valia para a busca e otimização de problemas de engenharia, sendo os conceitos básicos
introduzidos nos tópicos abaixo.
4.1 PROCESSO DE OTIMIZAÇÃO
O processo de otimização consiste basicamente, como descrito anteriormente, em
encontrar a solução ótima de determinado problema dentro de um conjunto de soluções,
normalmente sujeitas a restrições.
A fim de fornecer um embasamento para o entendimento da otimização de rota de
dutos, certos conceitos e definições são imprescindíveis de serem apresentados. Desta
forma, utilizando como referencial LIMA [15], alguns termos são expostos abaixo:
• Função Objetivo: Representa o valor a ser otimizado podendo ser
maximizado ou minimizado dependendo do modelo estudado;
• Variáveis de Projeto: São os parâmetros que afetam o valor da função
objetivo e que serão alterados no decorrer do processo até atingir um valor
ótimo que corresponde à solução do problema;
• Restrições ou Penalidades: São funções que restringem os valores que
podem ser atribuídos às variáveis de projeto, limitando as soluções através
de igualdades ou desigualdades; ou que reduzem o valor da função
objetivo caso o problema tenha infringido certas diretrizes pré-definidas;
2 Método de busca aleatória direcionada, fundamentado principalmente por HOLLAND [14], inspirada na teoria da evolução natural, capaz de obter a solução ótima num espaço de busca complexo.
15
• Espaço de Busca: Compreende a região das soluções viáveis ou possíveis
do problema a ser otimizado.
Desta forma, é possível modelar um problema complexo com inúmeras variáveis
com o objetivo de atender às necessidades de projeto e atingir um resultado ótimo.
Adicionalmente, para alcançar a esse valor, se utilizada uma técnica de busca, que no
presente trabalho aplica o método de Algoritmos Genéticos.
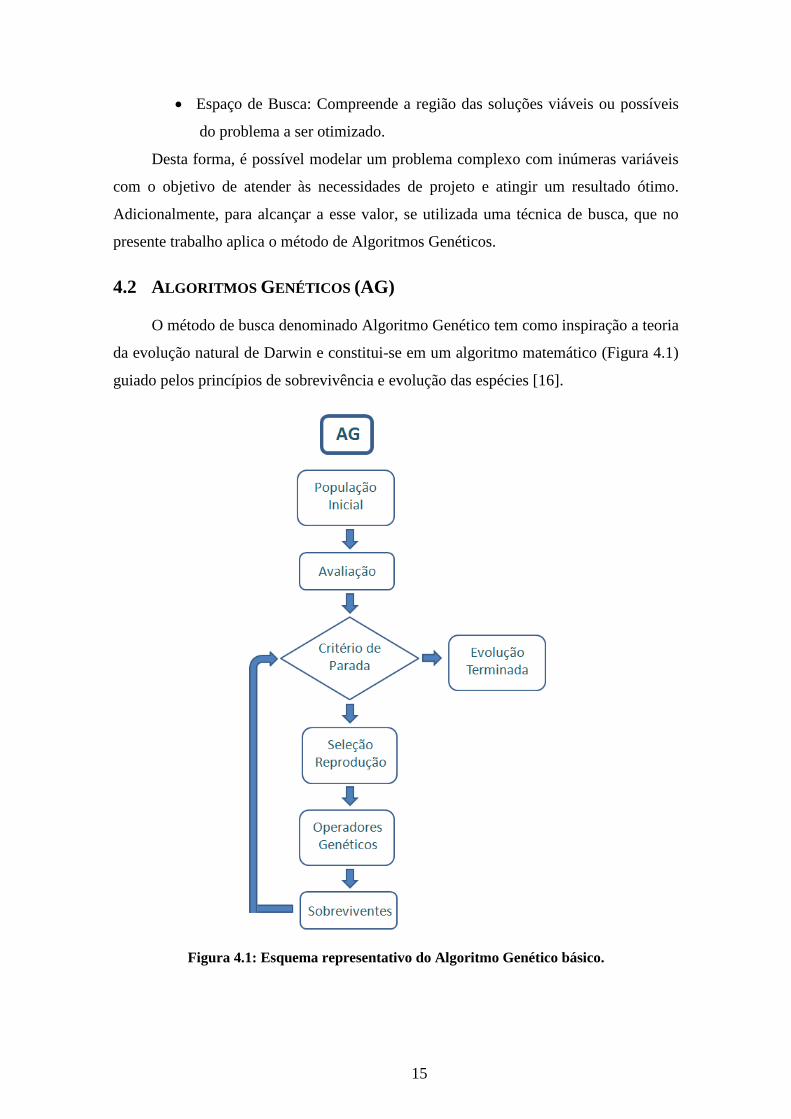
4.2 ALGORITMOS GENÉTICOS (AG)
O método de busca denominado Algoritmo Genético tem como inspiração a teoria
da evolução natural de Darwin e constitui-se em um algoritmo matemático (Figura 4.1)
guiado pelos princípios de sobrevivência e evolução das espécies [16].
Figura 4.1: Esquema representativo do Algoritmo Genético básico.

16
A metodologia seleciona os indivíduos mais adaptados para reprodução e
geração de descendentes, uma vez que os seres mais aptos possuem uma probabilidade
maior de reprodução, gerando filhos que podem manter a qualidade do material
genético na espécie. Desta forma, durante a reprodução, características dos pais são
passadas aos filhos através do cruzamento, gerando descendentes que carregam traços
de ambos os pais, e que, por sua vez, podem ser submetidos ao processo de mutação,
que confere características novas à espécie.
Posteriormente, na etapa de sobrevivência, ocorre a escolha dos indivíduos que
prosseguirão no processo de otimização, os quais são avaliados a partir da função
objetivo que define o problema, sendo a medida de aptidão a representação da qualidade
da solução avaliada. Ao final da geração, somente os indivíduos mais aptos são
selecionados para prosseguir na população, sendo os demais descartados.
A evolução desse processo gera populações com diferentes atributos, sendo os
mais aptos perpetuados, aprimorando a população em consequência da repetida seleção
dos melhores indivíduos de cada geração.
4.2.1 Conceitos Básicos
Para o completo entendimento do modelo algumas terminologias são
apresentadas. Desta forma, adotando como referencial LIMA [15], os principais
conceitos são:
• Geração: Representa cada iteração que o Algoritmo Genético executa,
sendo um ciclo de criação e de transformação de uma população;
• População: Compreende o conjunto de indivíduos (soluções) de um
problema, sendo o tamanho estipulado pelo usuário;
• Indivíduo: Representa um membro da população, formado pelo
cromossomo e possui uma aptidão associada, representando uma solução
candidata do problema;
• Cromossomo: É a estrutura que codifica uma solução, sendo a cadeia de
dados que contém informações relativas às variáveis do problema;
• Gene: Descreve os caracteres de um parâmetro formando a unidade
elementar do cromossomo;
• Alelo: Significa o valor assumido por um gene;
• Genótipo: Simboliza a informação contida no cromossomo, representando
a estrutura de dados de uma solução candidata (Figura 4.2);

17
• Fenótipo: É a decodificação do genótipo no espaço de busca (Figura 4.2);
• Aptidão: Mede a qualidade de um indivíduo no processo evolutivo, sendo
o parâmetro usado para a seleção e para a sobrevivência do mesmo.
Figura 4.2: Codificação do indivíduo. Fonte: [15]
Apresentado os termos referentes à metodologia do AG, é possível explicitar
sucintamente os processos que descrevem a otimização:
• Seleção: Determina a escolha dos indivíduos que servirão como pais no
processo de reprodução, para gerar descendência;
• Cruzamento ou Crossover: Gera novos indivíduos a partir da combinação
aleatória dos genes de diferentes cromossomos. Essa troca entre ancestrais
tem como objetivo determinar a carga genética dos descendentes;
• Mutação: Realiza modificações aleatórias no gene de alguns cromossomos,
a fim de garantir a diversidade entre os indivíduos, sendo aplicado após os
processos de seleção e cruzamento. Esse operador genético confere uma
maior exploração no espaço de busca do problema;
• Sobrevivência: Executa a substituição dos indivíduos depois da geração
dos descendentes, configurando uma nova população com os indivíduos
mais aptos, sendo a sobrevivência preterida aos menos aptos.
Cada etapa do processo (Figura 4.1) é abordada em maiores detalhes nos itens
subsequentes e a interface do programa utilizado está apresentada na Figura 4.3.

18
Figura 4.3: Interface AG.
4.2.2 População e Avaliação
Abordando o primeiro passo apresentado na Figura 4.1, inicia-se o processo de
otimização com uma população inicial com um número pré-definido de indivíduos,
determinado pelo usuário (Figura 4.4). Essa população inicial geralmente é formada
aleatoriamente e vai evoluindo em cada geração.
Figura 4.4: Tamanho da população.
Vale ressaltar que o tamanho da população possui alta influência no resultado do
processo, bem como no custo computacional, uma vez que ao adotar uma população
pequena, a convergência para um ponto satisfatório nem sempre é garantida, atingindo
uma convergência precoce. Por outro lado, caso o tamanho da população seja muito
elevado, o processo pode tornar-se oneroso computacionalmente, uma vez que para
19
cada indivíduo é necessário avaliar a sua aptidão, que dependendo da formulação, pode
tornar o processo demorado.
No presente trabalho foi adotada uma população de 60 indivíduos, a qual se
apresentou adequada para o estudo realizado, fornecendo resultados coerentes e
satisfatórios em um tempo de simulação plausível. Vale destacar que foram feitos
estudos variando o tamanho da população pra alcançar esse valor.
A função de aptidão (fitness) tem a função de qualificar cada indivíduo da
população para então selecionar os que serão utilizados para reprodução, bem como os
que sobreviverão no processo. Em problemas de otimização, a função de aptidão pode
ser igual à função objetivo, um resultado de seu escalonamento ou baseada no ranking
do indivíduo da população, estando ambas sempre relacionadas [15].
4.2.3 Seleção
A etapa subsequente do processo do AG é a seleção dos indivíduos para a
reprodução. A operação de seleção tem como objetivo escolher os indivíduos para
reprodução, sendo mais aptos da população preferidos, a fim de direcionar a evolução
do algoritmo.
Os principais métodos de seleção são o Torneio e a Roda da Roleta (Figura 4.5).
Figura 4.5: Seleção.
No procedimento do Torneio os indivíduos são selecionados aleatoriamente e
posteriormente comparados entre eles, sendo o melhor indivíduo escolhido para a
população intermediária. Em geral, a triagem é feita entre dois ou três indivíduos, não
sendo necessário o ranking da população.
No método da Roleta a população é distribuída na roda de acordo com a aptidão,
sendo a área disponível ajustada à aptidão do indivíduo que ela representa (Figura 4.6).
Desta forma, a probabilidade do ponteiro parar em um número é proporcional a fatia da
roleta, ou seja, a probabilidade do indivíduo ser escolhido será proporcional à sua
aptidão.

20
Figura 4.6: Roleta. Fonte: [15]
Assim, o método da roleta por fitness pode ser definido na seguinte ordem:
1. Ordenar as aptidões da população;
2. Calcular as aptidões acumuladas;
3. Gerar um número aleatório entre 0; ( )nIndiv
ifitness i
∑ ;
4. Selecionar o primeiro indivíduo cuja aptidão acumulada é maior que o
número aleatório gerado.
O método da roleta por fitness constitui o método tradicional, entretanto quando,
durante a otimização, ocorre um individuo muito discrepante, com fitness muito menor
ou muito maior que os demais indivíduos, o método tradicional torna-se falho. A fim de
contornar esse problema, aplica-se o método da roleta por ranking, o qual é definido da
seguinte forma:
1. Ordenar as aptidões da população;
2. Associar uma numeração crescente de acordo com a ordem das aptidões
[ ]1;nIndiv ;
3. Calcular a numeração acumulada associada a cada indivíduo;
4. Gerar um número aleatório entre 0; ( )nIndiv
inumeração i
∑ ;
5. Selecionar o primeiro indivíduo cuja numeração acumulada é maior que
o número aleatório gerado.
4.2.4 Cruzamento
Após a seleção dos indivíduos para a reprodução é aplicado o operador
cruzamento, o qual tem como objetivo a propagação das características dos indivíduos
mais aptos da população através da troca de material genético. Esta operação gera novos
indivíduos a partir de indivíduos promissores, podendo aqueles serem melhores ou
piores.

21
No cruzamento, é definida uma probabilidade de crossover (pc), a qual estipula
se haverá ou não troca de segmentos entre os cromossomos selecionados (Figura 4.7).
Essa probabilidade geralmente é elevada, variando de 0,5 a 1,0 [15], e para que ocorra o
cruzamento entre os pares é necessário que o número aleatório associado a eles seja
menor que a pc.
Figura 4.7: Parâmetros do cruzamento.
A partir disso, no caso de representação binária, decide-se o ponto de corte onde
ocorrerá a troca de genes, sendo necessária a geração de um numero aleatório inteiro
entre 1 e (lc-1), onde lc representa o comprimento do cromossomo, para representar o
local de manipulação de bits.
Os tipos de reprodução binária mais comuns em algoritmos genéticos são:
• Simples: Representado com um ponto de cruzamento;
• Múltiplo: Representado com mais de um ponto de corte;
• Uniforme: Representado por uma máscara, na qual é decidido de qual pai
será retirado o bit para a configuração do descendente.
Figura 4.8: Tipos de cruzamento binário. Fonte: [15]
Na Figura 4.8 podem-se observar cromossomos compostos por dez genes com
caracteres de binários, ilustrando os tipos de reprodução mais corriqueiros. O
cruzamento simples possui um único ponto de corte, que é escolhido aleatoriamente e
permite a troca de informação genética entre os cromossomos a partir deste ponto. Já a
reprodução múltipla é análoga ao cruzamento simples, e está representada na Figura 4.8
com dois pontos de corte (quatro e oito), sendo a troca de segmentos realizada a partir
desses dois pontos. Por último, o crossover uniforme é efetuado a partir de uma máscara
aleatória de cruzamento, na qual cada gene do descendente é criado através da cópia de

22
um gene dos pais. Assim, onde houver 1 na máscara de cruzamento, o gene
correspondente será copiado do primeiro pai e onde houver 0 será copiado do segundo,
repetindo o processo com os pais trocados para produzir o segundo descendente.
Já na codificação real, o crossover pode ser obtido através de operações
aritméticas sobre os pais, podendo ser por:
• Média aritmética: 1 2
2Pai PaiFilho +
= ;
• Média geométrica: 1 2*Filho Pai Pai= .
Vale destacar que os operadores por média tendem a diminuir a diversidade dos
filhos, uma vez que os descendentes sempre estão no meio do intervalo dos pais. Para
evitar esse problema há o operador BLX-α, no qual:
1 2 1( )Filho Pai Pai Paiβ= + − (4.1)
onde β é um número aleatório entre [ ];1α α− + ; α é o parâmetro que controla a
diversidade dos filhos.
O parâmetro α quando recebe o valor 0 equivale a gerar filhos aleatoriamente no
intervalo numérico entre os pais ( 2 1I Pai Pai= − ). Já se α for maior que 0, o intervalo
dos possíveis filhos é estendido em .Iα para ambos os lados (Figura 4.9). Tipicamente o
valor de α é 0,5 ou 0,25 [17].
Figura 4.9: Crossover real BLX-α. Fonte: [17]
Por fim, o crossover real adotado no presente trabalho calcula os filhos de
acordo com uma proporção dos pais. Assim cada gene do cromossomo é definido da
seguinte forma:
1 1 2( ) ( ) ( ) (1 )Filho i Pai i rnd Pai i rnd= ⋅ + ⋅ − (4.2)
2 1 2( ) ( ) (1 ) ( )Filho i Pai i rnd Pai i rnd= ⋅ − + ⋅ (4.3)
onde i representa cada gene do cromossomo; rnd é um número aleatório [ ]0;1 .

23
4.2.5 Mutação
Após a operação de cruzamento, outro operador genético que pode ser aplicado é
a mutação, a qual substitui um alelo de um gene por outro, aleatoriamente, resultando
em um novo cromossomo. A finalidade deste processo é melhorar a diversidade da
população, possibilitando uma maior varredura do espaço de busca e impedindo
problemas de convergência prematura.
A mutação ocorre conforme uma probabilidade, a qual é definida pela taxa de
mutação (pm) e somente aqueles indivíduos que tiverem um numero aleatório associado
menor que a pm podem ser alvo desse processo. Vale ressaltar que a probabilidade pm
deve ter um valor baixo para não tornar o processo por demasiado aleatório, sendo o
valor recomendado entre 0,1% e 5% [15].
Os tipos de mutação implementados na ferramenta de otimização são (Figura
4.10):
• Aleatória;
• Não-Uniforme.
Figura 4.10: Parâmetros da mutação.
No caso da mutação aleatória uniforme, em codificação binária, inverte-se o
valor de um dado bit de um indivíduo descendente (Figura 4.11), a menos da
probabilidade pm.
Figura 4.11: Mutação binária.
Nesse caso de mutação, a probabilidade pm é a mesma em todo o processo de
otimização. Desta forma, a fim de fazer uma exploração maior do espaço de busca no
inicio do processo, e reduzir essa taxa ao longo do processo, refinando a busca em torno

24
dos melhores indivíduos ao final da otimização, propõe-se a mutação não-uniforme.
Nesse caso a taxa de mutação é função do número de gerações.
Assim, no caso da mutação não-uniforme, em codificação real, substitui-se um
gene por um número extraído de uma distribuição não-uniforme.
max 1'
min 1
1
2
( ) 0,5( ) 0,5
1b
i i ii
i i i
tT
g g g se rg
g g g se r
r −
+ − ∆ <= − − ∆ ≥ ∆ = −
(4.4)
onde 'ig é o valor do gene mutado; ig é o valor do gene original; maxig é o valor
máximo que o gene ig pode assumir; minig é o valor mínimo que o gene ig pode
assumir; 1r e 2r são valores randômicos [ ]0;1 ; t é a geração atual; T é o número
máximo de gerações; b é o parâmetro do sistema que determina o grau de dependência
do numero de iterações [18].
4.2.6 Sobrevivência
Após o processo de reprodução os novos indivíduos sofrem o processo de
avaliação para a determinação da aptidão. Subsequente a esse processo, aplica-se o
procedimento de sobrevivência, o qual visa à substituição dos indivíduos depois da
geração da população de descendentes, sendo necessário escolher quem permanecerá na
evolução.
Dentre os métodos disponíveis, os principais são (Figura 4.12):
• Geracional;
• Steady-State;
• Elitismo.
Figura 4.12: Métodos de sobrevivência.
O método Geracional substitui toda a população pelos descendentes em cada
geração, eliminando a população original.

25
A substituição Steady-State gera um ou dois descendentes por vez. Estes
substituem os piores cromossomos, assim não há população intermediária. Entretanto,
só insere o indivíduo na população se possuir aptidão maior que a média populacional,
gerando um custo operacional adicional, já que é necessário reordenar os indivíduos e
recalcular a aptidão média.
Na estratégia Elitista, preservam-se os melhores indivíduos da geração,
garantindo que apareçam na geração seguinte. Assim, caso a elite não esteja na próxima
geração, devido aos operadores genéticos, os piores indivíduos são substituídos pelos
elementos ausentes. Além disso, vale destacar que o número de indivíduos que
constituem a elite deve ser limitado, para evitar problemas de convergência prematura,
sendo geralmente utilizado apenas o melhor indivíduo [15].
4.2.7 Critério de Parada
Configurada a nova população, é executada a verificação do critério de parada
(Figura 4.13) para analisar se este foi atingido, caso contrário repete-se o processo até
atingir um ponto satisfatório. Contudo, nem sempre se pode afirmar que esse ponto
satisfatório representa o ótimo global, principalmente quando o critério de parada
corresponde a um número máximo de gerações ou avaliações ou ainda um tempo limite
de processamento.
Outra forma de parar o processo é quando o algoritmo não evolui, não havendo
melhoria no valor da aptidão do melhor indivíduo ou da média da população depois de
várias gerações consecutivas. Ou ainda, pode-se utilizar, como critério de convergência,
interromper o processo quando a média da população se aproximar do valor do melhor
indivíduo.
Além disso, pode-se utilizar uma combinação destes critérios para garantir que o
processo não seja interrompido antes de um valor plausível, ou então que o processo
prossiga por gerações que não evoluem.

26
Figura 4.13: Critérios de parada.

27
CCaappííttuulloo 55 -- DDeessccrriiççããoo ddoo PPrroobblleemmaa
5.1 REPRESENTAÇÃO DA ROTA DO DUTO SUBMARINO
Os dutos submarinos são componentes do sistema de exploração de petróleo
responsáveis por transportar hidrocarbonetos. Neste sentido é necessário observar
algumas limitações de instalação e de operação para a execução do projeto, visando um
custo reduzido, bem como a diminuição da necessidade de intervenção.
Neste contexto, é estipulada uma parametrização para a representação
geométrica da configuração da rota do duto. Assim, a priori determina-se o ponto de
origem e destino do duto, representados respectivamente pelo ponto A e ponto B da
Figura 5.1. Adicionalmente, é determinado um conjunto de parâmetros para
representação em curva do duto, uma vez que pelas irregularidades do terreno e pela
necessidade de suplantar obstáculos, vê-se a necessidade de desenvolver curvas na rota.
Assim, as curvas são definidas como arcos de círculo, nos quais estão associados o raio
de curvatura (R) e as coordenadas de um Ponto de Interseção (PI), conforme
apresentado na Figura 5.1.

28
Figura 5.1: Representação da parametrização do duto. Fonte: [19]
Ainda no tocante do Ponto de Interseção, vale salientar que este está associado a
outros parâmetros demonstrados na Figura 5.1, como:
• As coordenadas dos pontos inicial (PC) e final (PT) da curva;
• O comprimento da reta tangente (T) que liga os pontos PC e PT ao ponto
de interseção PI;
• As coordenadas do centro do setor circular (C);
• O ângulo de abertura (AC) do setor circular.

29
Além disso, vale destacar que dependendo da posição dos obstáculos, a rota
poderá conter uma ou mais curvas. Desta forma o algoritmo procura adaptar a rota com
um determinado número de PI’s, satisfatório para cada cenário, sendo inicialmente
espaçados de modo equidistante na reta base AB através de pontos-base (pi), como
ilustra a Figura 5.2.
Figura 5.2: Distribuição de pontos-base sobre a reta AB . Fonte: [19]
A partir de cada um destes pontos-base, é possível determinar a posição de cada
ponto PI, sendo definida pelos seguintes parâmetros indicados na Figura 5.3:
• Afastamento (δ);
• Ângulo com o eixo horizontal (α).
A Bp1
δα
PI1
Figura 5.3: Definição do PI. Fonte: [19]
5.1.1 Formulação Matemática
Tomando os valores de afastamento (δ) e ângulo (α) e as coordenadas
cartesianas do ponto-base, definem-se as coordenadas cartesianas de cada PI pelas
expressões a seguir:
cos( )
sin( )i i
i i
PI p
PI p
X x
Y y
δ α
δ α
= + ⋅ = + ⋅
(5.1)
Os procedimentos para o cálculo dos parâmetros secundários que caracterizam
os trechos retos e curvos da rota (Figura 5.1) são definidos a seguir [19].

30
Figura 5.4: Cálculo dos pontos sobre a curva. Fonte: [19]
Primeiramente é calculado o ângulo central (AC) parametrizando-se os dois
segmentos consecutivos ( PIi-1
PIi
e PIi PI
i+1 ) indicados na Figura 5.4, com
comprimentos L1 e L2 respectivamente, e empregando a seguinte expressão:
1 2 1 22 2 2 2
1 1 2 2
arccos( ) ( )
f f g gACf g f g
⋅ + ⋅ = + ⋅ +
(5.2)
onde:
1 1 1 1
2 1 2 1
e, i i i i
i i i i
f x x g y yf x x g y y
− −
+ +
= − = − = − = −
(5.3)
Com o ângulo central (AC) calculado, é possível calcular o comprimento da
tangente (T):
tan2
ACT R = ⋅
(5.4)
Assim, é possível entrar nas equações paramétricas dos dois segmentos de reta e
calcular as coordenadas x e y dos pontos PC e PT.
( )( )
1 1
1 1
1 1
1 1
i
i
Tx x f LPC
Ty y g L
−
−
= + ⋅ −
= + ⋅ −
(5.5)
e
( )( )
2
2
2
2
i
i
Tx x f LPT
Ty y g L
= + ⋅
= + ⋅
(5.6)

31
Para o cálculo do centro C é necessário definir mais um ponto. Desta forma, na
Figura 5.4, seja o ponto H um ponto que divide a reta PC PT em dois segmentos de
igual tamanho, pode-se calculá-lo como:
( )( )
0,5
0,5i i
i i
PC PT
PC PT
x x xH
y y y
= + ⋅
= + ⋅ (5.7)
Em seguida são calculados os comprimentos CPI e HPI :
2 2CPI T R= + (5.8)
Com o ponto H calculado e PI, parametriza-se a reta HPI e calcula-se o
comprimento HPI . Tomando
( )( )
H PI
H PI
f x xg y y= −
= − (5.9)
obtém-se 2 2HPI f g= + (5.10)
Definindo-se agora a razão entre os comprimentos CPI e HPI CPIsHPI
= (5.11)
pode-se finalmente determinar as coordenadas do centro do círculo (C) pelas seguintes
expressões:
C PI
C PI
X x s fC
Y y s g= + ⋅
= + ⋅ (5.12)
5.1.2 Codificação da Rota
Definidos os cálculos dos parâmetros da rota, pode-se determinar a codificação
de cada indivíduo do algoritmo de otimização (Capítulo 4 - Metodologia de
Otimização), o qual é representado por um cromossomo com N conjuntos de genes,
sendo cada conjunto associado a um PI, contendo os seguintes parâmetros:
• Chave de Ativação (A);
• Afastamento – coordenada radial (δ);
• Ângulo – coordenada angular (α);
• Raio de Curvatura (R).

32
Como o número de PI’s pode variar ao longo do processo de otimização,
seguindo um número máximo especificado pelo usuário, é necessário um artifício de
ativação e desativação de PI’s ao longo do processo. Assim, a Chave de Ativação
assume essa função a partir de uma representação binária, na qual o valor 0 indica que o
PI está inativo, logo os parâmetros associados devem ser ignorados, e o valor 1
representa que o PI está sendo utilizado para a configuração da curva.
Desta forma, a codificação do cromossomo é representada da segue maneira:
1 1 1 1 2 2 2 2 n n n nA R A R A Rδ α δ α δ α…
onde 11 1 1A Rδ α são os dados do primeiro PI e n é o número máximo de PI’s definido
pelo usuário.
5.2 FUNÇÃO OBJETIVO
Descrita a parametrização do problema que constitui nos termos associados a
cada individuo, é necessário definir uma função de avaliação da aptidão de cada rota
candidata. Nesse sentido a função objetivo deve refletir a “qualidade” da rota analisada,
levando em consideração aspectos relevantes que dizem respeito à escolha de uma rota,
como dados geográficos/topográficos relacionados à batimetria de fundo e aos
obstáculos/interferências.
Um fator importante envolvido na avaliação é o comprimento total da rota, pois
implica em comprimento de duto e, consequentemente, no custo do projeto. Logo, em
uma visão preliminar, desconsiderando outros fatores que interferem na escolha da rota,
pode-se afirmar que a melhor configuração seria uma reta ligando o ponto inicial A ao
ponto final B e que qualquer reta diferente desta teria um comprimento maior. Então,
pode-se definir a priori como uma função de avaliação da rota ( fitness ) a relação entre
o comprimento da reta AB ( ABdist ) e o comprimento total da rota ( RotaL ):
AB
Rota
distfitnessL
= (5.13)
Desta forma, uma rota ideal teria fitness igual a 1 e qualquer outra rota real
possuiria valor de fitness entre 0 e 1.
Entretanto, em condições reais é necessário atender a restrições físicas,
geométricas e estruturais da trajetória, sendo assim alguns fatores devem ser
considerados, tais como declividade do terreno e a presença de obstáculos. Estes e

33
outros fatores são tratados introduzindo penalizações à função objetivo, sendo
consideradas no momento em que a restrição é violada. Por conseguinte o cálculo da
fitness , levando em consideração as penalidades, segue a seguinte expressão:
( )1
100 ABNp
Rota AB i ii
distfitnessL dist k penal
=
= ⋅+ ⋅∑
(5.14)
onde Np representa o número de penalidades; penali representa o valor de cada
penalidade i [1;Np]; ki representa a ponderação relativa atribuída a cada penalidade,
controlando a influência de cada penalização no resultado final; e a constante 100
representa um fator de escala para porcentagem.
Adicionalmente, para tratar o problema da otimização do peso de lastro mínimo
requerido (item 6.5) para manter o duto estável, foi atribuída uma nova formulação para
a fitness , a qual incorpora uma nova parcela:
( )1
1
100
( ) ( )
duto ABNp
duto Rota lastro reqTotal AB i ii
nElem
reqTotal req elemi
k distfitnessk L k W dist k penal
W W i L i
=
=
= ⋅+ + ⋅
= ⋅
∑
∑
(5.15)
onde dutok é a ponderação relativa ao comprimento do duto; lastrok é a ponderação
relativa ao lastro; reqTotalW é o peso requerido total de lastro da rota analisada; nElem é o
numero de elementos que compõe a rota; reqW é o peso requerido para estabilizar
determinado trecho de rota; elemL é o comprimento do trecho de rota analisado.
5.3 RESTRIÇÕES DO PROBLEMA
Como comentado no item 5.2 Função Objetivo, a definição da rota de um duto
segue uma série de limitações que são expressas em função de penalidades na solução
do problema, como mostrado na Figura 5.5.

34
Figura 5.5: Penalidades do problema de otimização de rota de dutos.
Nos itens seguintes, define-se cada penalidade e como são tratadas dentro da
otimização da rota.
5.3.1 Cruzamento do duto sobre si mesmo
Devido à aleatoriedade do processo de otimização, a representação geométrica
do duto pode assumir configurações diferentes dentro da faixa valores pré-definida para
as variáveis associadas. Logo, dependendo do número de pontos de interseção, dos
afastamentos e dos ângulos gerados, pode haver uma trajetória na qual o duto passe
sobre si mesmo.
Desta forma, estabeleceu-se uma estratégia de penalizar soluções que possuam
autocruzamento, sendo a constatação feita por um algoritmo de verificação de
cruzamento de segmentos de retas, o qual percorre cada segmento de duto contra todos
os demais, excluindo os que já foram verificados no início do ciclo [19]. Por fim a
penalidade acumula o número de interseções, sendo diretamente proporcional a esse
valor.
exp( ) 1Cruzamentopenal nInter= − (5.16)
onde nInter representa o número de interseções sobre si mesmo.
Assim, apesar de qualquer número de cruzamento gerar uma penalização, um
duto com menos cruzamentos será menos penalizado do que um com mais cruzamentos.
Vale destacar que testes foram executados para avaliar a melhor formulação.
Desta forma, como a função linear não representou de forma contundente, foi adotada
uma formulação exponencial.

35
5.3.2 Cruzamento de obstáculo
Visando principalmente áreas críticas como equipamentos de fundo, flowlines,
corais, entre outros, surge a necessidade de penalizar a rota que sobrepõe essas
demarcações. Sendo assim, foram considerados quatro tipos de representação de
obstáculos:
• Linha – definida por nós com coordenadas x, y e z, e segmentos
conectando sucessivamente os nós;
• Polígono – região fechada definida por vértices com coordenadas x, y e z,
e segmentos que ao final conectam ao primeiro vértice;
• Ponto – representa uma região esférica definida por um centro com
coordenadas x, y e z e um raio;
• Cilindro – região definida por um círculo com centro em coordenadas x, y
e z, raio e altura, orientado sempre na direção do eixo Z global.
Adicionalmente, existem áreas em que são toleráveis à passagem do duto e
outras em que a superposição é proibida como uma cabeça de poço. Nesse sentido,
atribui-se graus de importância para o obstáculo, como definido abaixo:
• Nível 0 – admite-se com certa tolerância haver sobreposição entre duto e
obstáculo (representado pela cor verde);
• Nível 1 – a superposição entre duto e obstáculo é condicionada
(representado pela cor amarelo);
• Nível 2 – não é admitido superposição (representado pela cor vermelho,
Figura 5.6).
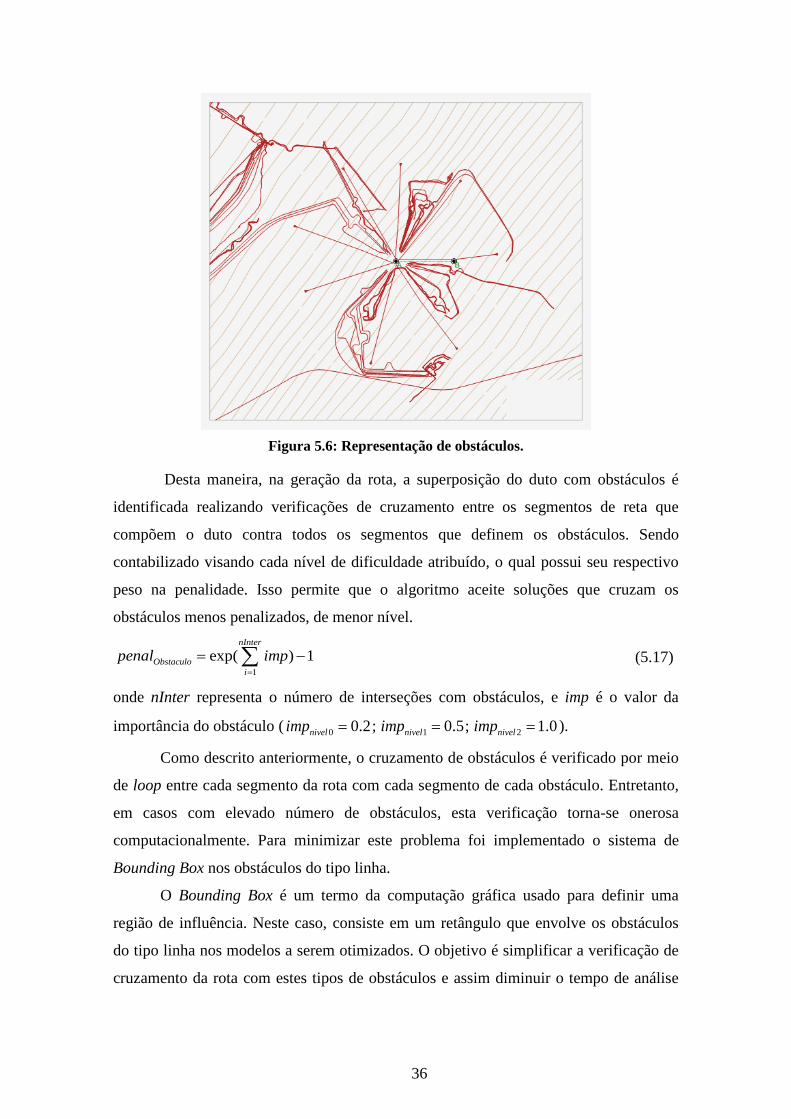
36
Figura 5.6: Representação de obstáculos.
Desta maneira, na geração da rota, a superposição do duto com obstáculos é
identificada realizando verificações de cruzamento entre os segmentos de reta que
compõem o duto contra todos os segmentos que definem os obstáculos. Sendo
contabilizado visando cada nível de dificuldade atribuído, o qual possui seu respectivo
peso na penalidade. Isso permite que o algoritmo aceite soluções que cruzam os
obstáculos menos penalizados, de menor nível.
1exp( ) 1
nInter
Obstaculoi
penal imp=
= −∑ (5.17)
onde nInter representa o número de interseções com obstáculos, e imp é o valor da
importância do obstáculo ( 0 1 20.2; 0.5; 1.0nivel nivel nivelimp imp imp= = = ).
Como descrito anteriormente, o cruzamento de obstáculos é verificado por meio
de loop entre cada segmento da rota com cada segmento de cada obstáculo. Entretanto,
em casos com elevado número de obstáculos, esta verificação torna-se onerosa
computacionalmente. Para minimizar este problema foi implementado o sistema de
Bounding Box nos obstáculos do tipo linha.
O Bounding Box é um termo da computação gráfica usado para definir uma
região de influência. Neste caso, consiste em um retângulo que envolve os obstáculos
do tipo linha nos modelos a serem otimizados. O objetivo é simplificar a verificação de
cruzamento da rota com estes tipos de obstáculos e assim diminuir o tempo de análise
37
no processo de otimização. A formulação do modelo Bounding Box e os estudos de
ganho computacional estão apresentados em JACOB [20].
5.3.3 Comprimento mínimo entre curvas
A fim de atender requerimentos da operação de lançamento de duto, fez-se
necessário estabelecer uma distância mínima entre duas curvas consecutivas, garantindo
que não haja mudança de sentido da rota sem haver espaço para a manobra da
embarcação de lançamento.
Por isso, estabeleceu-se uma restrição em termos da distância mínima entre
curvas, na qual se penaliza a trajetória quando este valor é desrespeitado. Vale destacar
que quanto menor a distância entre curvas, mais penalizada será a solução, em contra
partida, quando este valor superar o comprimento mínimo estabelecido, a solução não
sofrerá penalizações.
minmin
minCompMinEntreCurvas
min0
medidomedido
medido
L L se L LLpenal
se L L
− <= ≥
(5.18)
onde minL é o comprimento mínimo estabelecido; medidoL é o comprimento medido.
5.3.4 Comprimento mínimo de trecho reto no início e fim da trajetória
Assim como o requerimento do comprimento mínimo entre curvas, há uma
exigência de lançamento no que tange ao trecho inicial e final da trajetória, os qual
devem ser lineares. Visando isto, é proposta uma penalidade para favorecer
configurações de rota contendo um trecho reto inicial e final.
Desta forma, se o comprimento do trecho reto for inferior ao valor mínimo
estabelecido, a solução será penalizada.
minmin
minCompInicFinal
min0
medidomedido
medido
L L se L LLpenal
se L L
− <= ≥
(5.19)
5.3.5 Declividade
Outra consideração necessária diz respeito à batimetria, que, ao contrário das
penalidades descritas anteriormente, as quais tratam apenas de aspectos geométricos no
plano, necessita de informações da região. Assim, levando em consideração a topografia
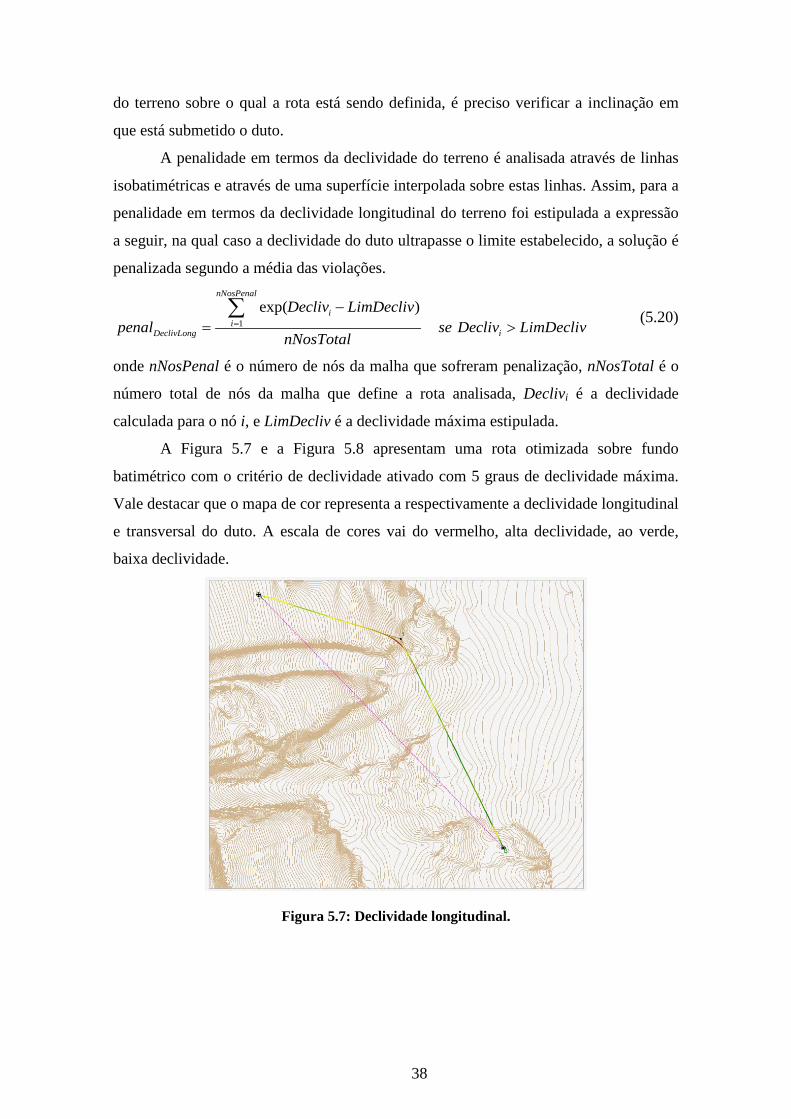
38
do terreno sobre o qual a rota está sendo definida, é preciso verificar a inclinação em
que está submetido o duto.
A penalidade em termos da declividade do terreno é analisada através de linhas
isobatimétricas e através de uma superfície interpolada sobre estas linhas. Assim, para a
penalidade em termos da declividade longitudinal do terreno foi estipulada a expressão
a seguir, na qual caso a declividade do duto ultrapasse o limite estabelecido, a solução é
penalizada segundo a média das violações.
1exp( )
nNosPenal
ii
DeclivLong i
Decliv LimDeclivpenal se Decliv LimDecliv
nNosTotal=
−= >∑
(5.20)
onde nNosPenal é o número de nós da malha que sofreram penalização, nNosTotal é o
número total de nós da malha que define a rota analisada, Declivi é a declividade
calculada para o nó i, e LimDecliv é a declividade máxima estipulada.
A Figura 5.7 e a Figura 5.8 apresentam uma rota otimizada sobre fundo
batimétrico com o critério de declividade ativado com 5 graus de declividade máxima.
Vale destacar que o mapa de cor representa a respectivamente a declividade longitudinal
e transversal do duto. A escala de cores vai do vermelho, alta declividade, ao verde,
baixa declividade.
Figura 5.7: Declividade longitudinal.

39
Figura 5.8: Declividade transversal.
5.3.6 Critério de raio mínimo de curvatura
Outro fator dependente da operação de lançamento de dutos submarinos é a
exigência de um raio mínimo de curvatura. Durante o processo de instalação, pode
ocorrer o posicionamento do duto em uma conformação curva excessivamente fechada.
Nesse caso o duto pode escorregar lateralmente durante a instalação, saindo da rota
original. Por isso, limita-se este raio (Figura 5.9), o qual é muito superior ao limite
estrutural do duto.
Figura 5.9: Raio de curvatura. Fonte: [20]

40
Esse critério é dependente basicamente de propriedades do solo como
coeficiente de atrito e propriedades do duto como peso submerso, uma vez que é
proporcional a força de atrito, e da tração residual devido à tração de lançamento.
minresidual
s
TRwµ
=⋅
(5.21)
( )minmin
1 min
min0
nNosPenali
iiRaioMin
i
R Rse R R
penal Rse R R
=
−<=
≥
∑ (5.22)
onde minR é o raio mínimo de curvatura requerido; iR é o raio calculado do nó i; residualT
é a tração residual devido a operação de lançamento; µ é o coeficiente de atrito do solo;
sw é o peso submerso do duto.
5.3.7 Critério de estabilidade
O critério de estabilidade hidrodinâmica é o escopo principal do presente
trabalho, logo será comentado em um tópico separado, entretanto para uma parte
introdutória, a verificação da estabilidade lateral de dutos utiliza três metodologias, de
acordo com a DNV RP-F109 [2]:
i. Estabilidade Estática Absoluta (Absolute Lateral Static Stability): Garante
que as cargas hidrodinâmicas atuantes no duto sejam menores do que a
resistência do solo, não permitindo o deslocamento lateral do duto;
ii. Estabilidade Generalizada (Generalized Lateral Stability Method): Permite
deslocamentos máximos admissíveis, analisando o peso requerido;
iii. Análise Dinâmica de Estabilidade (Dynamic Lateral Stability Analysis):
Calcula o histórico de deslocamentos do duto ao longo do tempo.
No presente trabalho, foram considerados os dois primeiros níveis de
estabilidade recomendados pela DNV RP-F109 [2]. No Capítulo 6 - Estabilidade de
Dutos Submarinos, descreve-se a formulação da metodologia Absoluta e Generalizada
que serão empregadas na ferramenta de otimização.
O critério Absoluto não permite deslocamentos, enquanto o critério
Generalizado permite deslocamentos predefinidos. O primeiro critério fornece como
resultado um fator de segurança associado à estabilidade (formulação completa está
apresentada no item 6.2), enquanto o segundo estabelece o peso requerido para o
deslocamento máximo permitido (formulação completa está apresentada no item 6.3).
41
Além disso, há a consideração da declividade transversal na formulação de estabilidade
que permite que rotas próximas de taludes sejam mais penalizadas.
Desta forma, a formulação da penalidade considera o fator de segurança ( )scγ
recomendado pela DNV RP-F109 [2] com devidas adaptações, as quais estão
apresentadas no item 6.4 e é descrita em termos da estabilidade vertical e lateral. Vale
destacar que a rota só viola a restrição quando o fator de segurança é menor que um
limite estabelecido.
_
_
1sc z
sc z
nNosPenali
iiEstabVert
SFpenal se SF
nNosTotal
γγ=
−= <∑
(5.23)
_
_
1sc y
sc y
nNosPenali
iiEstabLat
SFpenal se SF
nNosTotal
γγ=
−= <∑
(5.24)
onde SF é o fator de segurança estipulado, sendo utilizado o valor de 1.1; _sc z
iγ é o fator
de segurança vertical associado ao nó i; _sc y
iγ é o fator de segurança lateral associado ao
nó i.

42
CCaappííttuulloo 66 -- EEssttaabbiilliiddaaddee ddee DDuuttooss SSuubbmmaarriinnooss
De acordo com a DNV RP-F109 [2], três metodologias podem ser consideradas
na verificação da estabilidade de dutos:
i. “Absolute Lateral Static Stability” ou Estabilidade Estática Absoluta;
ii. “Generalized Lateral Stability Method” ou Estabilidade Generalizada;
iii. “Dynamic Lateral Stability Analysis” ou Análise Dinâmica de
Estabilidade.
O primeiro critério tem por objetivo garantir a Estabilidade Estática Absoluta, ou
seja, garantir que as cargas hidrodinâmicas atuando no duto sejam menores do que a
resistência do solo. Já o critério Generalizado objetiva garantir o“No Break-Out”, para
um duto praticamente estável, permitindo deslocamentos até metade do diâmetro do
duto, de modo a ativar o termo de resistência passiva do solo, mas mantendo-o na sua
“cavidade” com deslocamentos independentes do tempo. Por fim a Análise Dinâmica
permite deslocamentos acumulados, de modo que o duto pode sair e entrar e sua
“cavidade”, e a resistência do solo é dependente do histórico de deslocamentos do duto.
Estes três enfoques podem ser utilizados através de expressões analíticas
estáticas (no caso do Critério Absoluto descrito no item 3.6 da DNV RP-F109 [2]), ou
de curvas previamente calibradas (no caso do Critério Generalizado descrito no item 3.5
da DNV RP-F109 [2]). Já a metodologia da Análise Dinâmica, descrita no item 3.4 da
DNV RP-F109 [2], é baseada na geração de modelos e execução de análises dinâmicas
para cada configuração específica do duto.
Nos itens a seguir descrevem-se essas metodologias, com exceção da terceira
metodologia que não será abordada no presente trabalho.
6.1 ESTABILIDADE VERTICAL EM ÁGUA
Uma verificação inicial, a fim de evitar a flutuação do duto, é feita através da
densidade específica do duto (Sg ), que garante a estabilidade vertical em água.
Desta forma, o peso submerso do duto deve respeitar o seguinte critério:
1.0ww
s g
Bw B S
γγ = ≤+
(6.1)

43
onde B é o empuxo do duto por unidade de comprimento; ws é o peso submerso do
duto por unidade de comprimento; Sg é a densidade específica do duto; e γw é o fator de
segurança vertical na água.
Assim, o duto estará estável em água, segundo recomendação da DNV RP-F109
[2], quando o fator de segurança γw for 1.1, logo o duto não estará flutuando para
densidades específicas Sg acima desse valor.
6.1.1 Peso submerso do duto
Para determinar o peso do duto é preciso analisar cada camada da qual é
composto (Figura 6.1).
Figura 6.1: Seção Transversal do Duto. Fonte: [9] modificada.
Assim é possível calcular o diâmetro hidrodinâmico do duto D, o qual é obtido
através da seguinte expressão:
2*( )p cD OD t t= + + (6.2)
onde OD é o diâmetro externo do duto de aço, tp é a espessura do revestimento
anticorrosivo e tc é a espessura do revestimento de concreto.
Adicionalmente, a área e o peso no ar de cada uma das camadas são calculados
pelas seguintes expressões: 2 2( 2* )*
4s
sOD OD tA π − −
= (6.3)
*s s sW A ρ= (6.4)
2( 2* )*4
si
OD tA π −= (6.5)
*i i fW A ρ= (6.6)

44
2 2( 2* )*
4p
p
OD t ODA π
+ −= (6.7)
*p p pW A ρ= (6.8)
2 2( 2* 2* ) ( 2* )*
4p c p
c
OD t t OD tA π
+ + − += (6.9)
*c c cW A ρ= (6.10)
2
*4t
DA π= (6.11)
t s i p cW W W W W= + + + (6.12)
onde ts é a espessura do duto de aço; As , Ws e ρs são a área, o peso e o peso específico
do duto de aço; Ai , Wi e ρi são a área, o peso e o peso específico do fluido interno; Ap ,
Wp e ρp são a área, o peso e o peso específico do revestimento anticorrosivo; Ac , Wc e ρc
são a área, o peso e o peso específico da camada de concreto; At e Wt são a área e o peso
do total do duto.
Finalmente, o empuxo atuante no duto (B), o peso submerso (ws) e a densidade
específica (Sg) podem ser calculados:
B = π4 D2 ρw (6.13)
ws = Wt - B (6.14)
Sg = WtB (6.15)
onde wρ é a densidade da água.
6.2 ESTABILIDADE ESTÁTICA ABSOLUTA
Verificada a estabilidade do duto na água, para certificar que o mesmo está
apoiado no leito marinho, é possível aplicar a formulação da estabilidade de fundo.
O Método Absoluto de Estabilidade é a metodologia de projeto mais simples e
está baseada no equilíbrio de forças (Figura 6.2). Adicionalmente, algumas premissas
são adotadas:
• Não é tolerado deslocamentos do duto;
• A resultante horizontal das cargas hidrodinâmicas atuantes no duto deve
ser menor do que a resistência do solo, bem como a carga vertical de
sustentação (lift) deve ser menor do que o peso submerso do duto.

45
Figura 6.2: Forças atuantes no duto. Fonte: [19] modificada.
Além disso, algumas considerações são adotadas para o cálculo da estabilidade:
i. O carregamento de onda é considerado tomando uma única componente de
onda regular e unidirecional;
ii. As velocidades e acelerações são calculadas no nível do duto e é utilizada a
teoria linear de ondas;
iii. As cargas hidrodinâmicas são calculadas através da formulação
recomendada pela DNV RP-F109 [2], correlacionada à formulação de
Morison;
iv. A resistência do solo possui duas parcelas, uma de força de atrito,
dependente do coeficiente de atrito estático μ e da força normal aplicada
ao solo, e outra parcela correspondente à resistência passiva FR devido à
penetração inicial do duto no solo.
Assim, segundo a DNV RP-F109 [2], para que um duto seja considerado estável
é necessário que duas condições sejam atendidas, as quais estabelecem fatores de
segurança γsc, que garantem estabilidade lateral e vertical.
A primeira condição corresponde ao equilíbrio estático lateral, no qual se
verifica o equilíbrio entre as componentes horizontais de forças hidrodinâmicas e a
resistência do solo:
( )_ 1.0D I L
sc ys R
F F Fw F
µγ
µ+ +
≤+
(6.16)
onde γsc_y é o fator de segurança lateral; FD é a força de arrasto; FI é a força de inércia; FL
é a força de sustentação; ws é o peso submerso do duto; μ é o coeficiente de atrito; e FR
é a força de resistência passiva do solo.

46
A segunda corresponde ao equilíbrio estático vertical, no qual as cargas do peso
submerso do duto wS e da força de sustentação FL são analisadas:
_ 1.0Lsc z
s
Fw
γ ≤ (6.17)
onde γsc_z é o fator de segurança vertical.
Nos itens seguintes será explicitada melhor a rotina de cálculo para a obtenção
dos fatores de segurança.
6.2.1 Característica Ambiental de Onda
Um procedimento inicial na análise de estabilidade está no tratamento do
carregamento de ondas para o cálculo das forças devido à movimentação do fluido
induzido pelas ondas.
Assim, o modelo para a representação de ondas do mar utilizado foi a Teoria
Linear de Airy, a qual é válida para ondas de pequena amplitude (a), quando
comparadas ao comprimento ( )L .
Desta forma, utiliza-se a Teoria Linear da Onda para transformar os parâmetros
da onda regular (Figura 6.3), carregamento ambiental atuante, em velocidades de
partículas de água próximas ao leito marinho. Esse movimento das partículas de água,
induzidas pela onda, é adicionado algebricamente à corrente de fundo no nível do duto e
as forças na tubulação são calculadas usando a equação de Morison junto com
coeficientes de pico.
Figura 6.3: Desenho esquemático de uma onda regular. Fonte: [19].

47
Conforme mostrado na Figura 6.3, é importante destacar os parâmetros que
definem uma onda regular, os quais serão imprescindíveis no cálculo das velocidades e
acelerações no nível do duto devido à onda:
• Altura da onda, H ;
• Período da onda, T;
• Profundidade da lâmina d’água, d.
A formulação da elevação da superfície da onda η, que corresponde a um trem
de ondas regulares se movendo na direção-x (horizontal), pode ser expressa por:
( ) ( ), cosx t a k x tη ω= ⋅ ⋅ − ⋅ (6.18)
onde a é a amplitude da onda; k é o número da onda; t é o tempo; x é a posição da
partícula.
Outro parâmetro necessário para o cálculo dos movimentos da onda é o número
de onda k, o qual é encontrado iterativamente a partir da Equação de Dispersão, que
fornece uma relação de dispersão linear e relaciona a freqüência angular da onda ω e o
número de onda k em lâminas d’água com profundidade d:
( )2 tanhg k k dω = ⋅ ⋅ ⋅ (6.19)
onde g é aceleração da gravidade, g = 9.807 ms2 .
Logo, o processo iterativo para obtenção do número de onda k, é esquematizado
pelo diagrama da Figura 6.4.
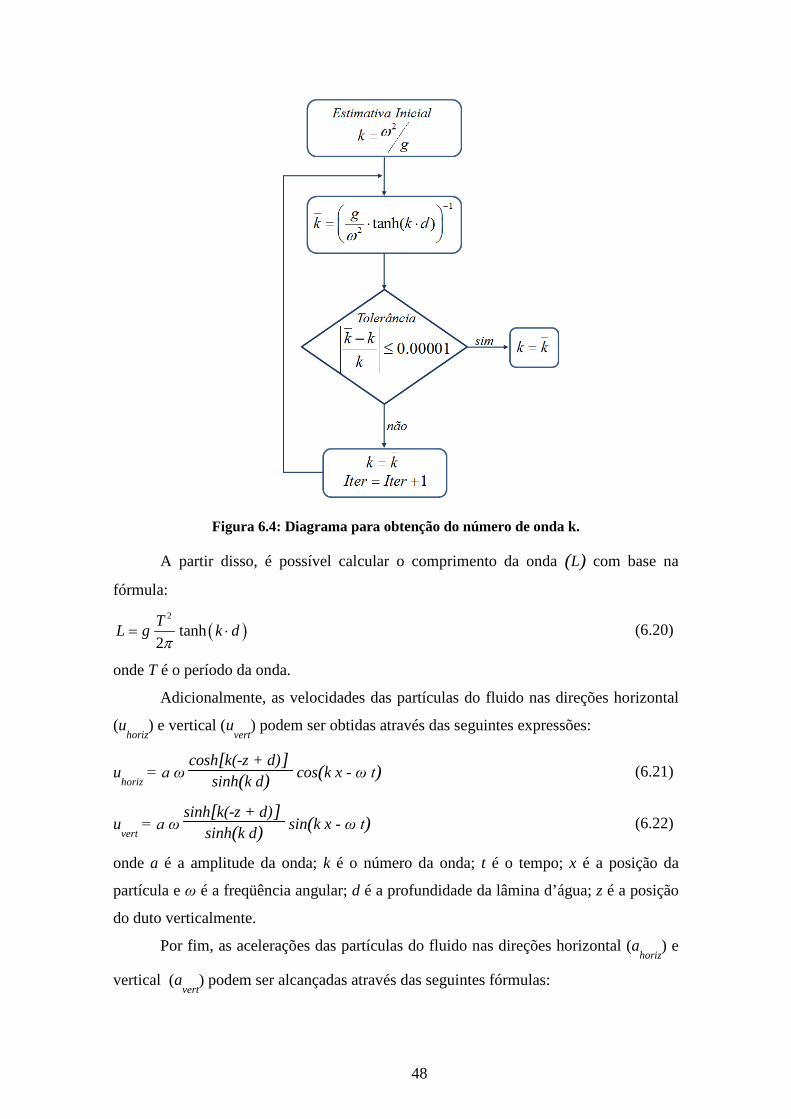
48
Figura 6.4: Diagrama para obtenção do número de onda k.
A partir disso, é possível calcular o comprimento da onda ( )L com base na
fórmula:
( )2
tanh2TL g k dπ
= ⋅ (6.20)
onde T é o período da onda.
Adicionalmente, as velocidades das partículas do fluido nas direções horizontal
(uhoriz
) e vertical (uvert
) podem ser obtidas através das seguintes expressões:
uhoriz
= a ω cosh[ ]k(-z + d)
sinh( )k d cos( )k x - ω t (6.21)
uvert
= a ω sinh[ ]k(-z + d)
sinh( )k d sin( )k x - ω t (6.22)
onde a é a amplitude da onda; k é o número da onda; t é o tempo; x é a posição da
partícula e ω é a freqüência angular; d é a profundidade da lâmina d’água; z é a posição
do duto verticalmente.
Por fim, as acelerações das partículas do fluido nas direções horizontal (ahoriz
) e
vertical (avert
) podem ser alcançadas através das seguintes fórmulas:
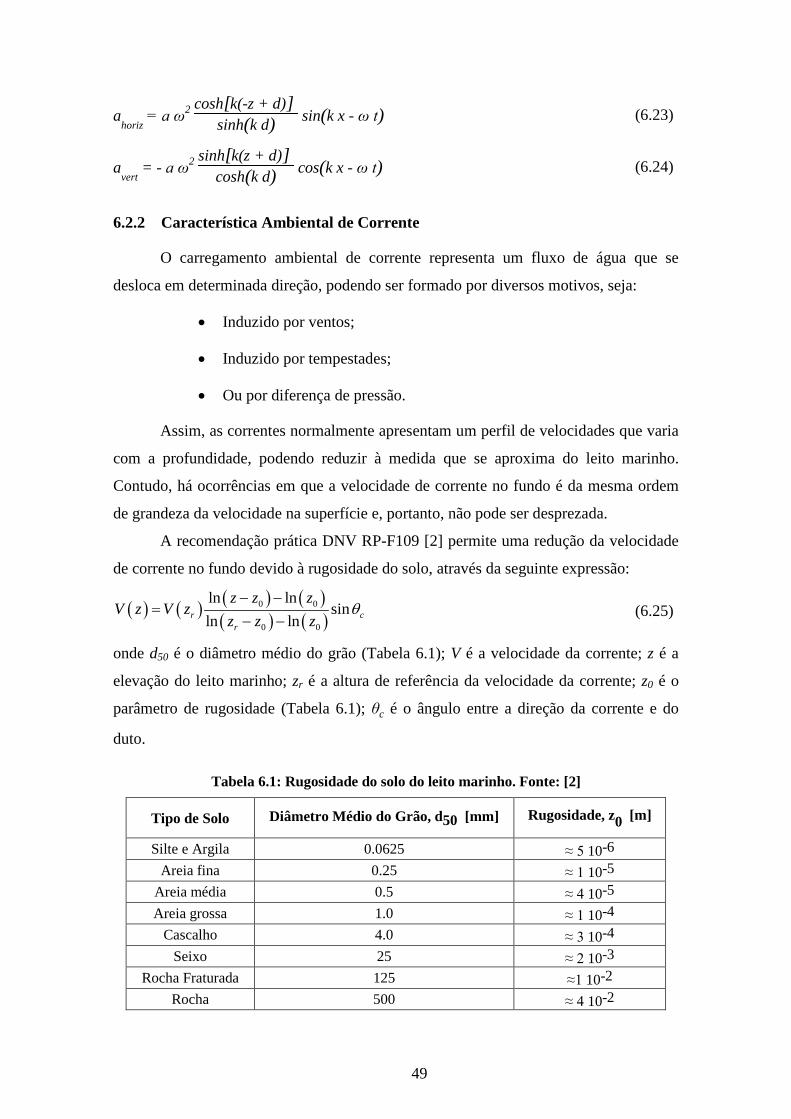
49
ahoriz
= a ω2 cosh[ ]k(-z + d)
sinh( )k d sin( )k x - ω t (6.23)
avert
= - a ω2 sinh[ ]k(z + d)
cosh( )k d cos( )k x - ω t (6.24)
6.2.2 Característica Ambiental de Corrente
O carregamento ambiental de corrente representa um fluxo de água que se
desloca em determinada direção, podendo ser formado por diversos motivos, seja:
• Induzido por ventos;
• Induzido por tempestades;
• Ou por diferença de pressão.
Assim, as correntes normalmente apresentam um perfil de velocidades que varia
com a profundidade, podendo reduzir à medida que se aproxima do leito marinho.
Contudo, há ocorrências em que a velocidade de corrente no fundo é da mesma ordem
de grandeza da velocidade na superfície e, portanto, não pode ser desprezada.
A recomendação prática DNV RP-F109 [2] permite uma redução da velocidade
de corrente no fundo devido à rugosidade do solo, através da seguinte expressão:
( ) ( ) ( ) ( )( ) ( )
0 0
0 0
ln lnsin
ln lnr cr
z z zV z V z
z z zθ
− −=
− − (6.25)
onde d50 é o diâmetro médio do grão (Tabela 6.1); V é a velocidade da corrente; z é a
elevação do leito marinho; zr é a altura de referência da velocidade da corrente; z0 é o
parâmetro de rugosidade (Tabela 6.1); θc é o ângulo entre a direção da corrente e do
duto.
Tabela 6.1: Rugosidade do solo do leito marinho. Fonte: [2]
Tipo de Solo Diâmetro Médio do Grão, d50 [mm] Rugosidade, z0 [m]
Silte e Argila 0.0625 ≈ 5 10-6 Areia fina 0.25 ≈ 1 10-5
Areia média 0.5 ≈ 4 10-5 Areia grossa 1.0 ≈ 1 10-4
Cascalho 4.0 ≈ 3 10-4 Seixo 25 ≈ 2 10-3
Rocha Fraturada 125 ≈1 10-2 Rocha 500 ≈ 4 10-2

50
6.2.3 Cargas Hidrodinâmicas – Formulação de Morison
A partir dos dados de onda e corrente, é possível fazer o cálculo das forças
hidrodinâmicas, sendo a formulação de Morison [21] bastante pertinente para o cálculo
das forças de fluidos em corpos esbeltos, com dimensão transversal característica D
pequena em comparação com o comprimento de onda λ (Dλ < 5).
Assim, considerando o duto submarino como um corpo esbelto, a formulação de
Morison assume que as forças podem ser calculadas através de uma aproximação, na
qual os parâmetros do fluxo na superfície do corpo (velocidade e aceleração) podem ser
aproximados pelo valor correspondente no eixo da seção transversal do duto. Além das
considerações das velocidades no nível do duto devido à onda e corrente, levam-se em
conta também os coeficientes de força derivados de testes em condições de fluxo
constante:
• Cd : Coeficiente de Arrasto (Drag);
• Cl : Coeficiente de Sustentação (Lift);
• Cm : Coeficiente de Inércia.
Além disso, a formulação de Morison considera que a força hidrodinâmica é
composta pela soma de duas parcelas:
i. Uma parcela de arraste associada a efeitos viscosos, proporcional às
velocidades do fluido e do corpo (FD);
ii. Uma parcela de inércia, proporcional às acelerações do fluido e do
corpo (FI).
Desta forma a equação de Morison é representada pelo somatório das seguintes
expressões:
( ) ( )12D w dF D C U t U tρ= ⋅ ⋅ ⋅ ⋅ ⋅ (6.26)
( )2
4I w mF D C A tπ ρ= ⋅ ⋅ ⋅ ⋅ (6.27)
onde ρw é a massa específica da água; D é o diâmetro externo do duto; e U(t) e A(t) são
respectivamente a velocidade e aceleração do fluido.
Vale destacar que, além das parcelas de força horizontal apresentadas acima, há
uma parcela de força de sustentação vertical (FL):

51
( )212L w lF D C U tρ= ⋅ ⋅ ⋅ ⋅ (6.28)
6.2.4 Fatores de Redução de Carga Devido à Interação Solo-Duto
Outro fator associado às forças atuantes em dutos apoiados no leito marinho é a
restrição de movimento devido à acomodação do duto no solo. Por isso, a DNV RP-
F109 [2] indica algumas restrições na Formulação de Morison para aplicações em dutos
apoiados no leito marinho e sujeitos a deslocamentos laterais sob cargas
hidrodinâmicas.
Assim, para tratar dessas restrições devido à interação do duto com o solo, a
recomendação prática DNV RP-F109 [2] sugere introduzir fatores de redução de carga,
para considerar a permeabilidade do leito marinho, a penetração do duto no solo e o
entrincheiramento.
6.2.4.1 Redução de Carga Devido à Permeabilidade do Solo
Solos permeáveis admitem fluxo de água pelos vazios do solo, o qual permeia
por debaixo do duto, podendo acarretar em uma redução de carga vertical. Desta forma,
para considerar esse efeito, propõe-se na DNV RP-F109 [2] aplicar o seguinte fator para
redução de carga:
, 0.7perm zr = (6.29)
6.2.4.2 Redução de Carga Devido à Penetração
Outro fator que reduz as cargas hidrodinâmicas sobre o duto é penetração zp ,
como ilustrado na Figura 6.5, e introduz fatores de redução tanto na direção vertical-z
quanto na horizontal-y (Figura 6.6):
, 1.0 1.4 0.3ppen y
zr
D= − ⋅ ≥ (6.30)
, 1.0 1.3 0.1 0.0ppen z
zr
D
= − − ≥
(6.31)
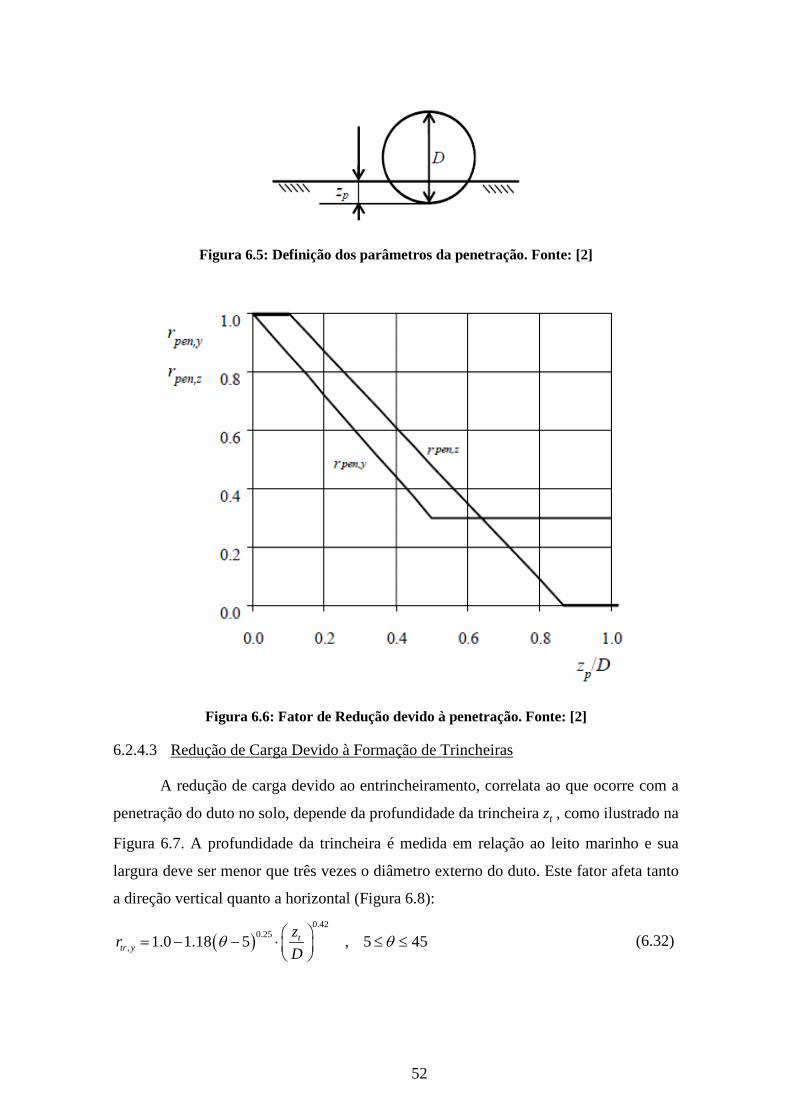
52
Figura 6.5: Definição dos parâmetros da penetração. Fonte: [2]
Figura 6.6: Fator de Redução devido à penetração. Fonte: [2]
6.2.4.3 Redução de Carga Devido à Formação de Trincheiras
A redução de carga devido ao entrincheiramento, correlata ao que ocorre com a
penetração do duto no solo, depende da profundidade da trincheira zt , como ilustrado na
Figura 6.7. A profundidade da trincheira é medida em relação ao leito marinho e sua
largura deve ser menor que três vezes o diâmetro externo do duto. Este fator afeta tanto
a direção vertical quanto a horizontal (Figura 6.8):
( )0.42
0.25, 1.0 1.18 5 , 5 45t
tr yzrD
θ θ = − − ⋅ ≤ ≤
(6.32)

53
( )0.46
0.43, 1.0 1.14 5 , 5 45t
tr zzrD
θ θ = − − ⋅ ≤ ≤
(6.33)
Figura 6.7: Definição dos parâmetros do entrincheiramento. Fonte: [2]
Figura 6.8: Fator de redução devido ao entrincheiramento. Fonte: [2]
6.2.5 Cargas hidrodinâmicas considerando os fatores de redução
Por fim, tendo em vista os valores das cargas ambientais e dos fatores de
redução, é possível reescrever as expressões para o cálculo das forças hidrodinâmicas,
considerando os fatores de redução devido à interação solo-duto.
O fator de redução total definido pelas parcelas de permeabilidade, penetração e
entrincheiramento é definido pela seguinte expressão:
, , , ,tot i perm i pen i tr ir r r r= ⋅ ⋅ (6.34)
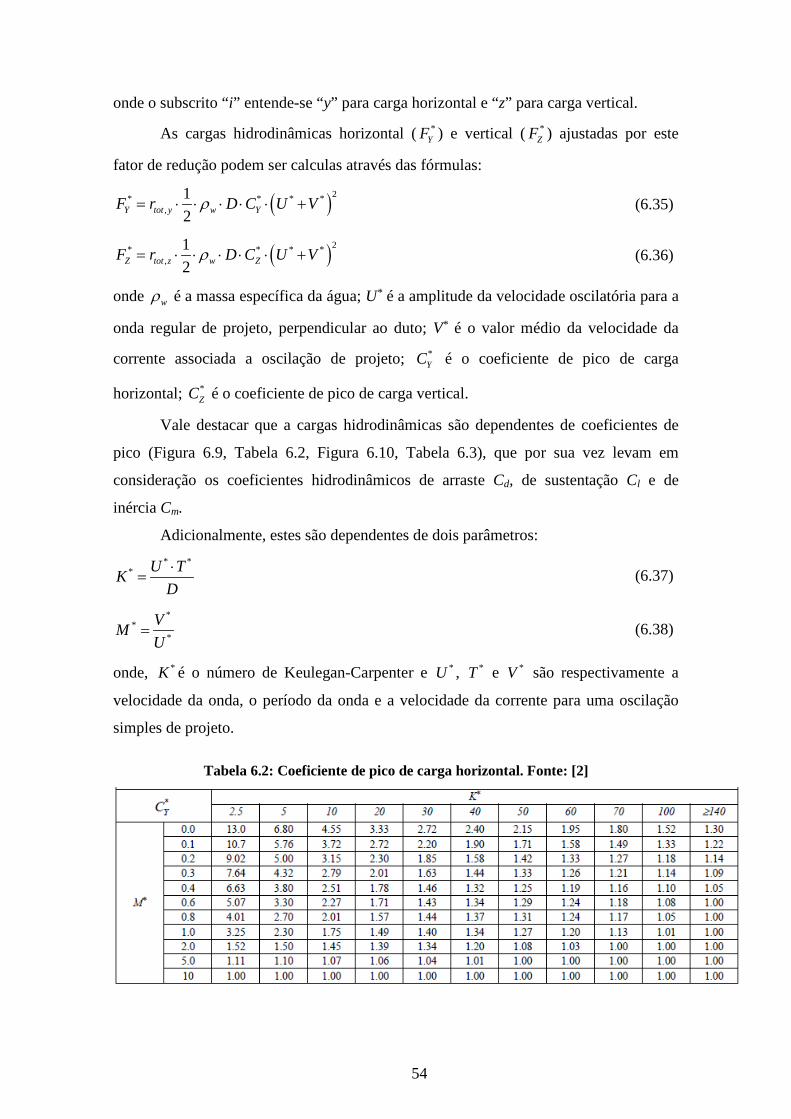
54
onde o subscrito “i” entende-se “y” para carga horizontal e “z” para carga vertical.
As cargas hidrodinâmicas horizontal ( *YF ) e vertical ( *
ZF ) ajustadas por este
fator de redução podem ser calculas através das fórmulas:
( )2* * * *,
12Y tot y w YF r D C U Vρ= ⋅ ⋅ ⋅ ⋅ ⋅ + (6.35)
( )2* * * *,
12Z tot z w ZF r D C U Vρ= ⋅ ⋅ ⋅ ⋅ ⋅ + (6.36)
onde wρ é a massa específica da água; U* é a amplitude da velocidade oscilatória para a
onda regular de projeto, perpendicular ao duto; V* é o valor médio da velocidade da
corrente associada a oscilação de projeto; *YC é o coeficiente de pico de carga
horizontal; *ZC é o coeficiente de pico de carga vertical.
Vale destacar que a cargas hidrodinâmicas são dependentes de coeficientes de
pico (Figura 6.9, Tabela 6.2, Figura 6.10, Tabela 6.3), que por sua vez levam em
consideração os coeficientes hidrodinâmicos de arraste Cd, de sustentação Cl e de
inércia Cm.
Adicionalmente, estes são dependentes de dois parâmetros: * *
* U TKD⋅
= (6.37)
**
*
VMU
= (6.38)
onde, *K é o número de Keulegan-Carpenter e *U , *T e *V são respectivamente a
velocidade da onda, o período da onda e a velocidade da corrente para uma oscilação
simples de projeto.
Tabela 6.2: Coeficiente de pico de carga horizontal. Fonte: [2]
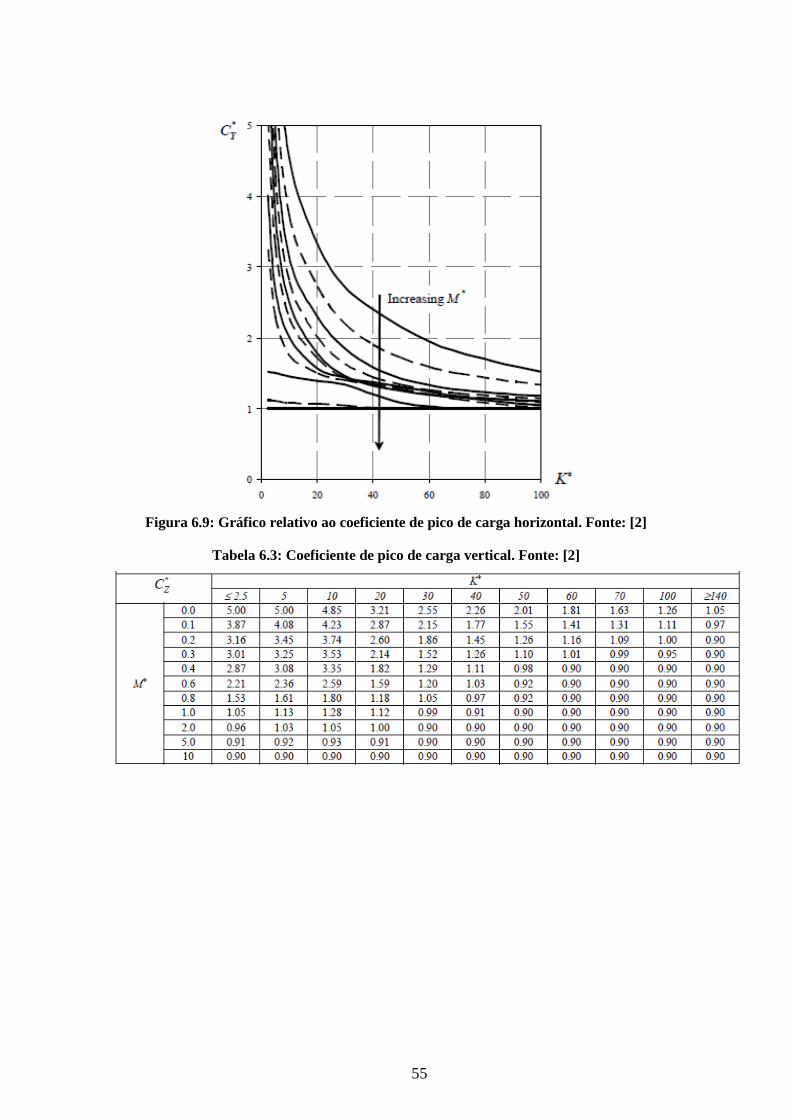
55
Figura 6.9: Gráfico relativo ao coeficiente de pico de carga horizontal. Fonte: [2]
Tabela 6.3: Coeficiente de pico de carga vertical. Fonte: [2]

56
Figura 6.10: Gráfico relativo ao coeficiente de pico de carga vertical. Fonte: [2]
6.2.6 Resistência Passiva do Solo
A resistência do solo ( latF ) é baseada em um coeficiente estático de fricção,
dependendo da força normal aplicada ao solo ( atF ). Além disso, a resistência pode ser
acrescida a uma força passiva, dependente da penetração da tubulação no solo ( RF ).
Desta forma é necessário observar o tipo de solo em que o duto está apoiado. Em
ambientes arenosos, os quais são considerados permeáveis, os efeitos de coesão são
reduzidos, já em argila, onde o solo é impermeável, os efeitos de coesão são
significantes.
A partir disso, podem-se inferir valores ao coeficiente de fricção ( µ ). Em dutos
revestidos de concreto adota-se [2]:
• Para solos arenosos, valores de µ igual a 0.6;
• Para solos argilosos, valores de µ igual a 0.2;
• Para rochas, valores de µ igual a 0.6.
Adicionalmente, a resistência passiva possui valores distintos dependendo do
deslocamento lateral sofrido pelo duto. Assim, na Figura 6.11 é apresentado o gráfico
relacionando as quatro regiões características da resistência passiva:

57
i. Região elástica com deslocamentos laterais menores que 2% do diâmetro
do duto;
ii. Região plástica com deslocamentos menores que metade do diâmetro do
duto ( 0,5D ), na qual a interação solo-duto causa uma elevação da
penetração devido à resistência passiva do solo, até atingis a resistência
máxima;
iii. Região caracterizada após o break-out, onde a resistência e a penetração
reduzem;
iv. Região residual com deslocamentos maiores que um diâmetro do duto
(1D ), na qual a resistência passiva e a penetração podem ser
consideradas constantes.
Figura 6.11: Gráfico Relativo à Resistência Passiva do Solo. Fonte: [2]
A resistência total do solo latF é definida como a soma da parcela da força de
atrito com a resistência passiva do solo:
lat at RF F F= + (6.39)
Sendo a força de atrito atF dependente do coeficiente estático de fricção e da
força normal aplicada ao solo:
at sF wµ= ⋅ (6.40)
onde Fat é a força de atrito; µ é o coeficiente de fricção; wS é o peso submerso do duto.

58
Adicionalmente, a resistência passiva RF descrita como uma força coesiva,
dependente da penetração da tubulação pz e da coesão do solo, pode ser calculada
segundo a seguinte relação [2]:
Para solos arenosos:
( )1.25
2
1.25
5.0 0.15 26.7
26.7
ps s s
R
C ps s
zse
DFF z
seD
κ κ κ
κ κ
⋅ − ⋅ ⋅ ≤
= ⋅ >
(6.41)
C s LF w F= − (6.42)
' 2s
sC
DF
γκ ⋅= (6.43)
onde CF é a força de contato vertical entre o solo e o duto; ; FL é a força vertical de
sustentação (lift),
sκ é o coeficiente de força relacionado à areia;
'sγ é o peso molhado
do solo.
Para solos argilosos: 1.31
0.39
4.1 pcR
C c
zFF G D
κ ⋅= ⋅
(6.44)
uc
s
sGD γ
=⋅
(6.45)
uc
C
s DF
κ ⋅= (6.46)
onde cG é o parâmetro de força relacionado à argila; us é a força de cisalhamento da
argila; sγ é o peso seco do solo; cκ é o coeficiente de força relacionado à argila.
Vale salientar que os parâmetros de solo usados para o cálculo da resistência
passiva consideram a penetração atual do duto, logo é importante explicitar a penetração
total sofrida pelo duto [2]:
p pi pmz z z= + (6.47)
onde pz é a penetração total do duto; piz é a penetração inicial; pmz é a penetração devido ao movimento do duto.

59
Para solos arenosos:
0.670.037pis
zD
κ −= ⋅ (6.48)
Para solos argilosos: 3.2 0.70.3 0.3
0.0071 0.062pi c c
c c
z G GD κ κ
= ⋅ + ⋅
(6.49)
Outro fator que vale destacar é o cálculo dos coeficientes sκ e cκ para a
penetração inicial, os quais devem considerar o peso máximo do duto e zero de força de
sustentação (lift).
Além da penetração, deve considerar o entrincheiramento do tubo, no qual a
resistência da parede da trincheira pode ser expressa através de uma penetração
equivalente ptz igual a:
1 tan2 2
pt tz zD
θ= ⋅ ≤ (6.50)
onde tz é a profundidade da trincheira.
6.3 ESTABILIDADE GENERALIZADA
Ao contrário do método de estabilidade absoluta descrito no item anterior, o
método generalizado de estabilidade lateral (“Generalized Lateral Stability Method”)
como proposto pela DNV RP-F109 [2], admite certo valor de deslocamento lateral para
o duto, sob a ação de um espectro de onda oscilatória de projeto que induz velocidades
perpendiculares ao duto.
Neste método, o valor admissível para o deslocamento lateral pode ser
estabelecido como um valor que não resulte em solicitações superiores às suportáveis
pelo duto, evitando problemas como deformações ou tensões excessivas. Com isso, este
método pode levar a significativas reduções no peso requerido para o duto devido aos
deslocamentos permissíveis.
A DNV RP-F109 [2] sugere duas faixas para o deslocamento lateral admissível:
• 0.5D - Constituindo um deslocamento de até metade do diâmetro da
tubulação, considerando dutos “praticamente estáveis” (Virtual Stable
Pipes);
• 10D - Estabelecendo um deslocamento de até dez vezes o diâmetro.

60
Também diferentemente do método de estabilidade absoluta, que considerava
uma única componente de onda regular, no método generalizado considera-se o estado
de mar representado por um espectro de ondas (item 6.3.1), do qual são derivados os
seguintes parâmetros: Us (velocidade oscilatória) e Tu (período de cruzamento zero), os
quais também são associados à velocidade de corrente V.
6.3.1 Espectro de JONSWAP
O espectro de JONSWAP pode ser calculado de duas formas, através de tabelas,
como medida de espectros, ou de forma analítica. É importante destacar os parâmetros
que definem uma onda de mar irregular, os quais serão imprescindíveis no cálculo da
velocidade oscilatória Us e do período de cruzamento zero Tu :
• Altura significativa da onda, sH ;
• Período de pico da onda, pT ;
Para o espectro JONSWAP, a função de densidade espectral Sηη é dada por:
24 exp 0.5
2 5 5exp4
p
p
p
S g
ω ωσ ω
ηηωα ω γω
− − − ⋅ − = ⋅ ⋅ ⋅ − ⋅
(6.51)
onde ω é a frequência angular da onda de projeto; ωp é a freqüência de pico da onda de
projeto 2
ppTπω = .
Sendo a constante generalizada de Phillip α calculada por: 2 2
2
.5 . .(1 0.287.ln )16
s pHgω
α γ= − (6.52)
Adicionalmente, o parâmetro da largura espectral σ é dado por:
0.07
0.09pif
elseω ω
σ≤
=
(6.53)
Já o fator de intensificação de pico γ pode ser tomado como:
5 3.6exp(5.75 1.15 ) 3.6 5.01 5.0
p
s
TH
ϕγ ϕ ϕ ϕ
ϕ
≤= − < < = ≥
(6.54)

61
A partir disso, obtém-se a velocidade espectral da onda induzida no leito do mar
( )UUS ω , a qual pode ser alcançada através de uma transformação espectral de ondas ao
nível do mar usando uma teoria de onda de primeira ordem: 2( ) ( ) ( )UUS G Sηηω ω ω= ⋅ (6.55)
Sendo a função de transferência G responsável por transformar a elevação da
superfície do mar em velocidade de fluxo de onda induzida no leito do mar:
( )sinh( )
Gk dωω =⋅
(6.56)
onde d é a profundidade da lâmina d’água; k é o número da onda.
Os momentos espectrais M de ordem n são definidos como:
0
( )nn UUM S dω ω ω
∞
= ⋅∫ (6.57)
A partir disso pode extrair a velocidade espectral ( sU ) e o período de
cruzamento zero ( uT ), necessários para o cálculo das forças hidrodinâmicas aplicadas
sobre o duto.
02sU M= (6.58)
0
2
2uMTM
π= (6.59)
6.3.2 Curvas de Projeto
Para obter valores de peso do duto requeridos para atender ao deslocamento
admissível, a recomendação prática DNV RP-F109 [2] estabelece curvas de projeto
calibradas a partir de resultados de um grande número de análises dinâmicas. As
análises dinâmicas empregadas na montagem dessas curvas foram realizadas
considerando fundo plano horizontal, e ignorando efeitos de forças axiais geradas por
temperatura, pressão e restrições nas extremidades do duto.
No estabelecimento das curvas de projeto, considera-se que o deslocamento
lateral Y é governado por um conjunto de parâmetros adimensionais, como definido a
seguir:
( ), , , , , ,s cY f L K M N G Gτ= (6.60)
onde:

62
L é o peso significativo do duto, 20.5s
w s
wLD Uρ
=
K é o número significativo de Keulegan-Carpenter, s uU TKD
= ;
M é a relação entre a velocidade oscilatória e o espectro de projeto, s
VMU
= ;
N é o fator de aceleração espectral, s
u
UNg T
= ;
τ é o número de oscilações do espectro da velocidade de projeto no fundo,
proj
u
tT
τ = , sendo projt o tempo de simulação do estado de mar;
Gs é o parâmetro de densidade do solo (areia), 's
sw
Ggγρ
=⋅
;
Gc é o parâmetro de densidade do solo (argila), uc
s
SGD γ
=⋅
;
6.3.3 Peso Requerido
O resultado da aplicação das curvas de projeto é o parâmetro de peso requerido,
o qual é comparado com o peso significativo L, definido como:
20.5s
w s
wLD Uρ
= (6.61)
onde sw é o peso submerso por unidade de comprimento; wρ é a massa específica da
água; Us é a velocidade oscilatória; D é o diâmetro externo incluindo os revestimentos.
Desta forma, o parâmetro de peso requerido necessário para levar a uma
tubulação “praticamente estável” (com deslocamentos menores do que meio diâmetro) é
denotado por Lstable, enquanto o peso requerido para a obtenção de deslocamento lateral
menor que 10 vezes o diâmetro é denominado L10, estando ambos os pesos apresentados
nos itens 6.3.3.1 e 6.3.3.2. Critérios intermediários de deslocamento podem ser
estabelecidos, definindo-se o peso requerido LY para um deslocamento admissível Y de
acordo com a seguinte fórmula:

63
( ) ( ) 10
loglog log log
0.50.5log0.01
stable
Y stable
LL YL L
τ
= +
(6.62)
De acordo com a DNV RP-F109 [2], esta aproximação é aplicável a 0.024N ≤
para argilas e 0.048N ≤ para areias, sendo N é o fator de aceleração espectral.
Ainda segundo a recomendação prática DNV RP-F109 [2], 10L é válido para
1000 ondas e pode ser assumido como proporcional ao número de ondas τ do estado de
mar. Já stableL independe da duração do estado de mar. Caso o deslocamento adotado
seja outro, deve–se considerá-lo de modo conservador variando linearmente com o
número de ondas do estado de mar:
( )0.5 10 0.5 0.5 0.00951000
Yττ τ= + − = + (6.63)
Por exemplo, um estado de mar com de duração de três horas ou 10800s e
período de cruzamento zero Tu > 10.8s pode submeter o duto a menos do que 1000
ondas; desta forma a expressão acima pode ser empregada para reduzir o deslocamento
esperado.
6.3.3.1 Curvas de projeto para solos arenosos
De acordo com a DNV RP-F109 [2], o peso mínimo requerido do duto para
obter uma configuração “praticamente estável” pode ser obtido com base nas Tabela 6.4
e Tabela 6.5 ou na Figura 6.12. Observa-se que a Tabela 6.4 para K ≥ 10 depende de K,
mas não depende N, enquanto a Tabela 6.5 para K ≤ 5 depende de N, mas não depende
de K.

64
Tabela 6.4: Peso mínimo, Lstable
( )2 + M2 , para dutos em areia, K ≥ 10 . Fonte: [2]
Tabela 6.5: Peso mínimo, Lstable
( )2 + M2 , para dutos em areia, K ≤ 5 . Fonte: [2]

65
Figura 6.12: Peso mínimo, Lstable
( )2 + M2 , para dutos em areia. Fonte: [2]
Caso seja considerado o deslocamento lateral admissível de até 10 diâmetros do
duto, aplica-se a Tabela 6.6 ou a Figura 6.13 para determinar o peso mínimo requerido
para a tubulação em solos arenosos.
Tabela 6.6: Peso mínimo, L10
( )2 + M2 , para dutos em areia. Fonte: [2]

66
Figura 6.13: Peso mínimo, L10
( )2 + M2 , para dutos em areia. Fonte: [2]
6.3.3.2 Curvas de projeto para solos argilosos
Para solos argilosos, a DNV RP-F109 [2] estabelece as seguintes expressões
para determinar o peso mínimo da tubulação requerido no critério “praticamente
estável” (com deslocamento máximo Y igual a 0.5 D):
( )0.6790 cstable
GL f MN K
= (6.64)
( ) ( ) ( )1.120.58 log 0.60 log 0.47 1.0f M M M = + + ≤ (6.65)
Vale destacar que para valores elevados de Gc esta fórmula do critério
generalizado pode resultar em um peso excessivo. Neste caso o método de estabilidade
absoluta descrito no item 6.2 pode levar a dutos mais leves.
Para determinar o peso mínimo da tubulação requerido em um critério que
admita maiores deslocamentos, pode ser empregada a fórmula a seguir, que corresponde
a limitar o deslocamento relativo máximo Y a 10 τ
1000 [2]:
( )3
3
21
102
21
2
bC
bCb
CC para K KL K
CM C para K KK
+ ≥= + + <
(6.66)
Os coeficientes envolvidos nesta fórmula estão tabulados no Apêndice A da
DNV RP-F109 [2].
67
6.3.4 Recomendações
O critério generalizado possui algumas restrições de uso, desta forma algumas
recomendações para a utilização das curvas de projeto devem ser consideradas.
Analisando-se os parâmetros adimensionais que governam o deslocamento
lateral, pode-se observar que nem todos os casos com valores elevados para N, K, M
correspondem necessariamente a condições físicas reais, e os valores fornecidos não são
válidos para casos extremos com um peso específico superior a 3 (Sg > 3 ). Além disso,
a DNV RP-F109 [2] também indica que esta metodologia não deve ser utilizada para
dutos com Sg < 1.05 .
21gS N K Lπ
= + ⋅ ⋅ ⋅ (6.67)
Adicionalmente, existem outros casos onde a DNV RP-F109 [2] recomenda o
uso do método de estabilidade absoluta (item 6.2) ao invés do método generalizado:
• Para solos argilosos com valores de Gc > 2.78;
• Em águas profundas, onde K pode ser muito pequeno quando comparado
ao valor de M, visto que a presença de corrente acarreta uma grande
elevação no valor de M.
6.4 FORMULAÇÃO DOS FATORES DE SEGURANÇA
Apresentadas as formulações do Critério Estático Absoluto (item 6.2) e do
Critério Generalizado (item 6.3), é possível explicitar os fatores de segurança utilizados
para a restrição do processo de otimização (item 5.3.7).
Assim, para o critério absoluto foi utilizado os fatores de segurança fornecidos
pela DNV RP-F109 [2] em termos de estabilidade vertical e lateral, respectivamente.
_ *s
sc zZ
wF
γ = (6.68)
_ * *S R
sc yY Z
w FF Fµ
γµ
⋅ +=
+ ⋅ (6.69)
Já no que tange ao método generalizado, a penalidade da estabilidade lateral
pode ser descrita em termos da razão entre o peso significativo do duto L e o peso
requerido Lreq (Lstable, L10 ou LY) obtidos das curvas de projeto propostas na DNV RP-
F109 [2].

68
_sc yreq
LL
γ = (6.70)
6.4.1 Fatores de Segurança considerando Declividade
Os métodos Absoluto e Generalizado são derivados originalmente da DNV RP-
F109 [2] a qual considera apenas fundo plano, entretanto, no caso de batimetrias reais, é
necessário considerar a declividade associada ao fundo batimétrico.
Desta forma, estendeu-se o critério para considerar taludes, a fim de assegurar
que o processo de otimização de rotas favoreça trajetórias relativamente planas
(perpendicular ao duto), evitando deslizamento em regiões onde a batimetria apresenta
inclinação transversal elevada (Figura 6.14).
Figura 6.14: Forças Hidrodinâmicas considerando inclinação da batimetria. Fonte: [22]
Quanto ao método de estabilidade estática absoluta, a expressão associada ao
fator de segurança foi alterada para definir um critério de estabilidade com o ângulo de
inclinação transversal tθ , como segue:
( )_ *
coss tsc z
Z
wF
θγ
⋅= (6.71)
( )( )_ * *
cossin
S t Rsc y
Y S t Z
w FF w Fµ θ
γθ µ
⋅ ⋅ +=
+ ⋅ + ⋅ (6.72)
Quanto ao método de estabilidade generalizada, a seguinte expressão pode ser
definida para fornecer um fator de segurança associado ao peso significativo do duto
( L ), considerando a declividade do terreno.
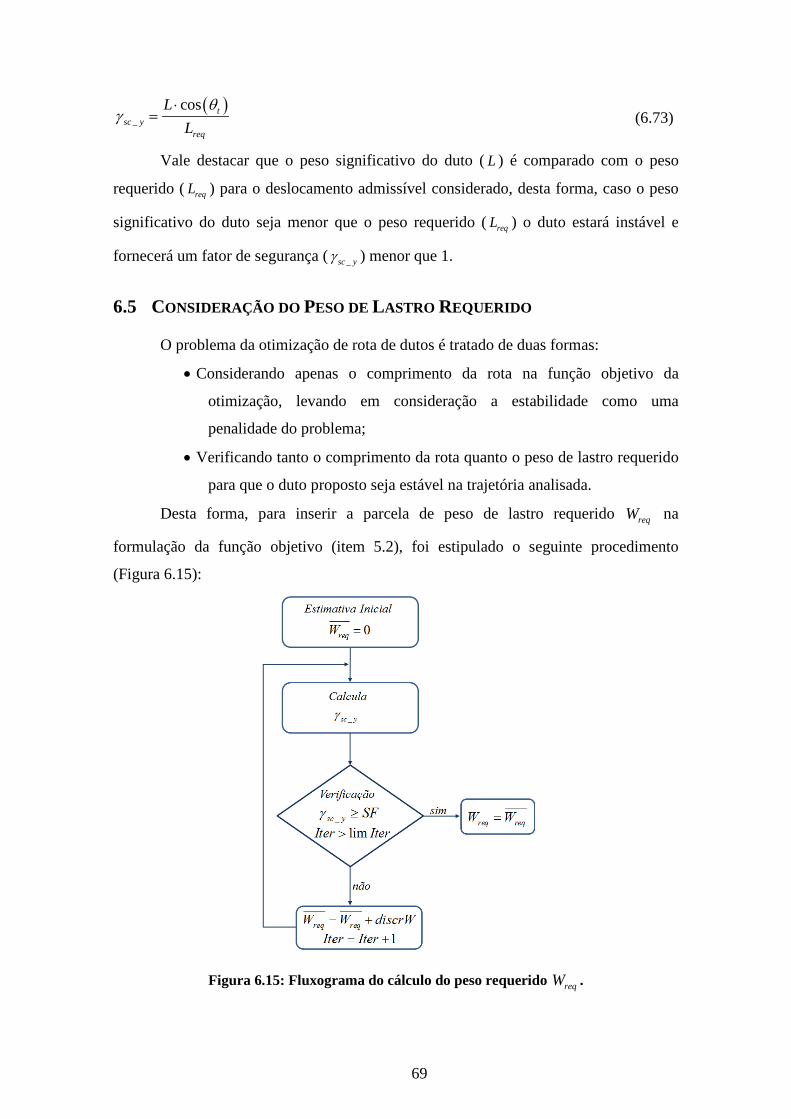
69
( )_
cos tsc y
req
LL
θγ
⋅= (6.73)
Vale destacar que o peso significativo do duto ( L ) é comparado com o peso
requerido ( reqL ) para o deslocamento admissível considerado, desta forma, caso o peso
significativo do duto seja menor que o peso requerido ( reqL ) o duto estará instável e
fornecerá um fator de segurança ( _sc yγ ) menor que 1.
6.5 CONSIDERAÇÃO DO PESO DE LASTRO REQUERIDO
O problema da otimização de rota de dutos é tratado de duas formas:
• Considerando apenas o comprimento da rota na função objetivo da
otimização, levando em consideração a estabilidade como uma
penalidade do problema;
• Verificando tanto o comprimento da rota quanto o peso de lastro requerido
para que o duto proposto seja estável na trajetória analisada.
Desta forma, para inserir a parcela de peso de lastro requerido reqW na
formulação da função objetivo (item 5.2), foi estipulado o seguinte procedimento
(Figura 6.15):
Figura 6.15: Fluxograma do cálculo do peso requerido reqW .

70
Esse procedimento visa aumentar gradualmente o peso de lastro do duto ( reqW )
até que este forneça um fator de segurança ( _sc yγ ) que atenda ao fator de segurança
mínimo estipulado (SF), sendo adotado o valor de 1.1 para o presente trabalho. Desta
forma, tendo em mãos o reqW , calcula-se o peso submerso do duto ( sw ) e, por
conseguinte, aplica-se o cálculo das forças hidrodinâmicas e de resistência do solo (item
6.2) para estipular o _sc yγ para o critério absoluto ou aplica-se o cálculo do peso
requerido para o deslocamento máximo estipulado (item 6.3) para obter o _sc yγ do
critério generalizado.
Vale destacar que o peso de lastro ( reqW ) calculado não considera uma espessura
de concreto associada ao duto, atendendo apenas aos tipos de lastro de enterramento ou
colchão de concreto (item 3.1).
6.6 VALIDAÇÃO E COMPARAÇÃO DOS MÉTODOS
Para verificar a consistência e corroborar os resultados foi feito um estudo de
validação dos critérios de estabilidade. Assim foi executada uma comparação do
procedimento de estabilidade absoluta da DNV RP-F109 [2] usando o cálculo de forças
hidrodinâmicas de Morison com o exemplo fornecido pelo PRCI V.2.[3] para o nível 1.
Ainda no intuito de comparação, foi feito um estudo com os mesmos parâmetros
usados para a validação para avaliar a diferença entre os métodos absoluto e
generalizado da DNV RP-F109 [2] considerando mar regular (item 6.2.1) e mar
irregular (item 6.3.1).
6.6.1 Validação da Formulação
O modelo de validação da análise de estabilidade utilizou como parâmetros de
entrada os apresentado no exemplo fornecido pelo PRCI V.2.[3], sendo esses
parâmetros descritos na Tabela 6.7:
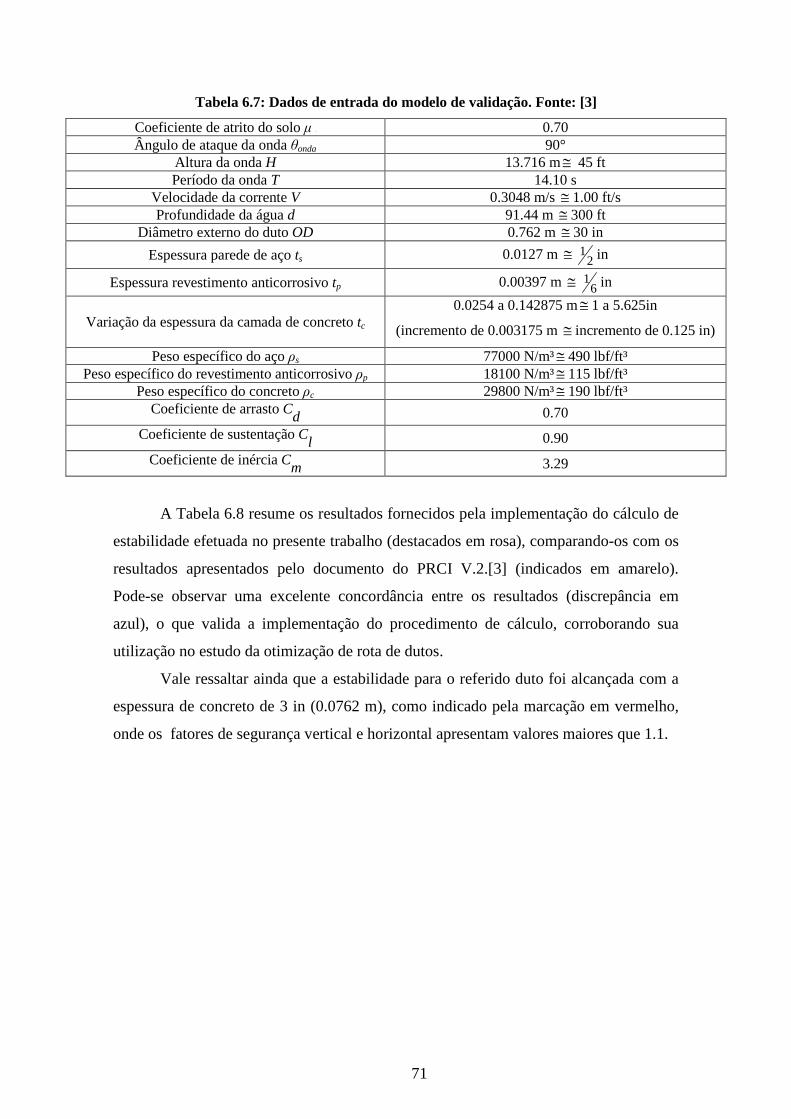
71
Tabela 6.7: Dados de entrada do modelo de validação. Fonte: [3]
Coeficiente de atrito do solo μ [] 0.70 Ângulo de ataque da onda θonda 90°
Altura da onda H 13.716 m≅ 45 ft Período da onda T 14.10 s
Velocidade da corrente V 0.3048 m/s ≅ 1.00 ft/s Profundidade da água d 91.44 m ≅ 300 ft
Diâmetro externo do duto OD 0.762 m ≅ 30 in Espessura parede de aço ts 0.0127 m ≅ 1
2 in
Espessura revestimento anticorrosivo tp 0.00397 m ≅ 16 in
Variação da espessura da camada de concreto tc 0.0254 a 0.142875 m≅ 1 a 5.625in
(incremento de 0.003175 m ≅ incremento de 0.125 in)
Peso específico do aço ρs 77000 N/m³≅ 490 lbf/ft³ Peso específico do revestimento anticorrosivo ρp 18100 N/m³≅ 115 lbf/ft³
Peso específico do concreto ρc 29800 N/m³≅ 190 lbf/ft³ Coeficiente de arrasto Cd 0.70
Coeficiente de sustentação Cl 0.90 Coeficiente de inércia Cm 3.29
A Tabela 6.8 resume os resultados fornecidos pela implementação do cálculo de
estabilidade efetuada no presente trabalho (destacados em rosa), comparando-os com os
resultados apresentados pelo documento do PRCI V.2.[3] (indicados em amarelo).
Pode-se observar uma excelente concordância entre os resultados (discrepância em
azul), o que valida a implementação do procedimento de cálculo, corroborando sua
utilização no estudo da otimização de rota de dutos.
Vale ressaltar ainda que a estabilidade para o referido duto foi alcançada com a
espessura de concreto de 3 in (0.0762 m), como indicado pela marcação em vermelho,
onde os fatores de segurança vertical e horizontal apresentam valores maiores que 1.1.

72
Tabela 6.8: Tabela comparativa entre os resultados do PRCI (em amarelo) e planilha em Fortran de cálculo de estabilidade absoluta (em rosa).
CAMADA CAMADA ÂNG. PESO GRAVID. ESPECIF.
VELOC. ACEL. FORÇA FORÇA FORÇA SF DISCR. DISCREPÂNCIA SF VERTICAL
CONCR. CONCR. FASE SUBM. PART. PART. ARRAST. LIFT INER. HORIZ. SF θ DISCR.
MIN DISCR.
[in] [m] θ[°] [N/m] [m/s] [m/s²] [N/m] [N/m] [N/m] θ HORIZ. SF VERT. SF VERT.
1 0,025400 - -949,75 -951,52 0,82 1,18 0,00 409,67 526,71 0,00 -2,52 -1,80 -1,80
1,125 0,028575 - -787,07 -788,07 0,85 1,18 0,00 412,84 530,79 0,00 -2,23 -1,48 -1,48
1,25 0,031750 - -623,14 -624,62 0,89 1,18 0,00 416,01 534,86 0,00 -1,95 -1,17 -1,17
1,375 0,034925 - -457,96 -459,71 0,92 1,18 0,00 419,18 538,94 0,00 -1,66 -0,85 -0,85
1,5 0,038100 - -291,52 -293,34 0,95 1,18 0,00 422,34 543,01 0,00 -1,38 -0,54 -0,54
1,625 0,041275 - -123,83 -125,51 0,98 1,18 0,00 425,51 547,09 0,00 -1,10 -0,23 -0,23
1,75 0,044450 85 45,12 43,78 1,01 1,01 0,35 0,34 0,40 0,40 38,44 36,48 49,42 46,70 785,05 783,69 0,00 0 0,91 0,94 2,88% 0,08 0,08 2,32%
1,875 0,047625 58 215,32 214,53 1,04 1,04 0,75 0,73 0,34 0,34 176,47 172,21 226,89 220,37 678,22 677,16 0,00 0 0,95 0,97 2,16% 0,39 0,39 0,57%
2 0,050800 37 386,77 385,28 1,06 1,06 1,00 0,98 0,24 0,24 310,96 305,01 399,81 392,58 488,39 487,44 0,00 0 0,97 0,98 1,29% 0,69 0,7 1,21%
2,125 0,053975 0 559,48 557,49 1,09 1,09 1,18 1,16 0,00 0,00 438,19 431,98 563,39 554,57 0,00 0,00 0,00 0,01 0,99 1,01 1,68% 0,99 1,01 1,68%
2,25 0,057150 14 733,44 732,61 1,12 1,12 1,15 1,16 0,10 0,10 421,47 414,47 541,89 534,14 202,09 201,40 0,22 0,23 6,51% 1,35 1,37 1,21% 1,29 1,31 1,34%
2,375 0,060325 22 908,65 907,74 1,15 1,14 1,11 1,10 0,15 0,15 396,24 389,66 509,45 502,03 317,44 316,69 0,39 0,4 2,11% 1,78 1,81 1,46% 1,59 1,61 1,25%
2,5 0,063500 28 1085,12 1082,87 1,17 1,17 1,07 1,07 0,19 0,19 370,88 364,85 476,85 469,92 403,52 402,79 0,55 0,56 1,81% 2,28 2,31 1,49% 1,89 1,91 1,30%
2,625 0,066675 32 1262,84 1260,91 1,20 1,2 1,04 1,04 0,21 0,21 351,85 345,88 452,37 445,11 461,95 461,17 0,70 0,71 1,81% 2,79 2,83 1,36% 2,18 2,21 1,43%
2,75 0,069850 36 1441,82 1440,42 1,22 1,22 1,01 1,01 0,24 0,24 330,70 325,44 425,18 418,85 519,62 519,54 0,84 0,85 1,54% 3,39 3,44 1,42% 2,47 2,5 1,21% 2,875
0,073025 39 1622,05 1619,92 1,24 1,24 0,98 0,98 0,25 0,25 314,19 309,39 403,96 396,95 564,13 563,32 0,97 0,98 0,94% 4,02 4,07 1,34% 2,76 2,79 1,10%
3 0,076200 42 1803,53 1802,35 1,27 1,27 0,95 0,94 0,27 0,27 296,77 291,88 381,56 375,06 608,16 607,11 1,10 1,11 0,91% 4,73 4,8 1,53% 3,05 3,08 1,07%
3,125 0,079375 44 1986,27 1984,77 1,29 1,29 0,93 0,91 0,28 0,28 285,37 281,66 366,90 361,93 640,09 639,21 1,22 1,23 0,42% 5,41 5,49 1,39% 3,33 3,37 1,11%
3,25 0,082550 46 2170,26 2168,65 1,31 1,31 0,90 0,88 0,29 0,29 273,61 269,99 351,79 345,88 671,93 671,32 1,35 1,36 1,01% 6,17 6,26 1,45% 3,62 3,66 1,18%
3,375 0,085725 48 2355,51 2354,00 1,34 1,34 0,88 0,88 0,30 0,30 261,56 258,31 336,29 331,28 703,62 703,43 1,46 1,47 0,38% 7,00 7,11 1,48% 3,90 3,94 1,04%
3,5 0,088900 49 2542,00 2540,80 1,36 1,36 0,87 0,85 0,30 0,30 256,29 252,47 329,51 323,98 724,25 723,86 1,58 1,59 0,66% 7,71 7,82 1,35% 4,18 4,22 0,96%
3,625 0,092075 51 2729,76 2727,60 1,38 1,38 0,84 0,82 0,31 0,31 243,82 240,80 313,48 309,39 755,80 754,50 1,69 1,7 0,47% 8,71 8,83 1,38% 4,46 4,5 0,93%
3,75 0,095250 52 2918,76 2917,32 1,40 1,4 0,83 0,82 0,32 0,32 238,30 234,96 306,39 302,09 776,61 776,40 1,80 1,81 0,45% 9,53 9,66 1,38% 4,74 4,78 0,93%
3,875 0,098425 53 3109,02 3107,04 1,42 1,42 0,82 0,82 0,32 0,32 232,70 229,12 299,19 294,80 797,52 796,83 1,91 1,92 0,56% 10,39 10,53 1,31% 5,01 5,06 0,97%
4 0,101600 54 3300,54 3298,22 1,44 1,44 0,81 0,79 0,33 0,33 227,02 224,75 291,89 287,50 818,53 817,26 2,01 2,02 0,28% 11,31 11,45 1,24% 5,28 5,33 0,85%

73
6.6.2 Comparação de Modelos de Análise de Estabilidade
Após a validação do modelo, foi feito um estudo comparando os métodos
absoluto e generalizado da DNV RP-F109 [2] considerando mar regular e mar irregular.
Para essa comparação foram utilizados os mesmo parâmetros fornecidos pelo PRCI
V.2.[3] (Tabela 6.9), a menos dos coeficientes hidrodinâmicos, os quais no método
absoluto foram extraídos das Tabela 6.2 e Tabela 6.3 apresentadas no item 6.2.5.
Tabela 6.9: Dados de entrada do problema. Fonte: [3]
Coeficiente de atrito do solo μ [] 0.70 Ângulo de ataque da onda θonda 90°
Altura da onda H 13.716 m≅ 45 ft Período da onda T 14.10 s
Velocidade da corrente V 0.3048 m/s ≅ 1.00 ft/s Profundidade da água d 91.44 m ≅ 300 ft
Diâmetro externo do duto OD 0.762 m ≅ 30 in Espessura parede de aço ts 0.0127 m ≅ 1
2 in
Espessura revestimento anticorrosivo tp 0.00397 m ≅ 16 in
Variação da espessura da camada de concreto tc 0.0254 a 0.142875 m≅ 1 a 5.625in
(incremento de 0.003175 m ≅ incremento de 0.125 in)
Peso específico do aço ρs 77000 N/m³≅ 490 lbf/ft³ Peso específico do revestimento anticorrosivo ρp 18100 N/m³≅ 115 lbf/ft³
Peso específico do concreto ρc 29800 N/m³≅ 190 lbf/ft³
Comparando a Tabela 6.8 e a Tabela 6.10, pode-se perceber que os resultados
apresentados pelo modelo absoluto são mais conservadores que os apresentados pelo
AGA-PRCI, uma vez que pelo método absoluto a estabilidade foi atingida com 55 8 in
(0.1429 m), enquanto pelo nível 1 foi conseguida com 3 in (0.0762 m), garantindo
maior confiabilidade no modelo apresentado pela DNV RP-F109 [2]. Vale destacar que
isso se deve principalmente aos coeficientes hidrodinâmicos que são diferentes nas duas
propostas. Adicionalmente não foi adotado um ângulo de fase para a avaliação da
Tabela 6.10.
Analisando os resultados apresentados nas Tabela 6.10 e Tabela 6.11 pode-se
observar que o método absoluto é mais conservador que o método generalizado, uma
vez que não permite deslocamentos no duto. Além disso, pode-se notar que o resultado
para mar regular (Tabela 6.10) apresentou fatores de segurança menores que o mar
irregular (Tabela 6.11), devido à velocidade da onda atribuída às duas abordagens. O
mar regular (usando a Teoria Linear de Airy) apresentou uma velocidade de onda de

74
0.91 m/s, enquanto o mar irregular (usando o espectro de onda de JONSWAP) forneceu
uma velocidade de 0.82 m/s, tornando o mar regular mais conservador. Vale destacar
que para o estudo, a título de comparação, foi utilizado o mesmo H e T para as duas
teorias, enquanto o que se usa na prática é Hmax (altura máxima da onda) e Tmax
(período máximo da onda) para mar regular e Hs (altura significativa) e Tp (período de
pico) para mar irregular.

75
Tabela 6.10: Comparação entre os resultados do Critério Absoluto (em verde) e do Critério Generalizado (em azul) utilizando mar Regular. CAMADA CAMADA PESO FORÇA FORÇA SF SF SF SF SF
CONCRETO CONCRETO SUBM. VERT. HORIZ. VERT. VERT. HORIZ. HORIZ. HORIZ.[in] [m] [N/m] [N/m] [N/m] ÁGUA 0,5*D 10*D
1 0,025400 -949,75 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,001,125 0,028575 -787,07 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00
1,25 0,031750 -623,14 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,001,375 0,034925 -457,96 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00
1,5 0,038100 -291,52 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,001,625 0,041275 -123,83 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00
1,75 0,044450 45,12 1743,91 1472,40 8,31 4,07 1,01 0,03 0,01 0,02 0,031,875 0,047625 215,32 1766,20 1488,53 8,32 4,04 1,04 0,12 0,06 0,07 0,15
2 0,050800 386,77 1788,49 1504,66 8,33 4,01 1,06 0,22 0,10 0,13 0,262,125 0,053975 559,48 1810,77 1520,80 8,34 3,98 1,09 0,31 0,14 0,18 0,38
2,25 0,057150 733,44 1833,06 1536,93 8,35 3,96 1,12 0,40 0,18 0,24 0,502,375 0,060325 908,65 1855,35 1553,07 8,36 3,93 1,15 0,49 0,22 0,29 0,62
2,5 0,063500 1085,12 1877,64 1569,20 8,38 3,90 1,17 0,58 0,26 0,34 0,742,625 0,066675 1262,84 1899,92 1585,33 8,39 3,87 1,20 0,66 0,30 0,40 0,86
2,75 0,069850 1441,82 1922,21 1601,47 8,40 3,85 1,22 0,75 0,34 0,45 0,982,875 0,073025 1622,05 1944,50 1617,60 8,41 3,82 1,24 0,83 0,38 0,50 1,11
3 0,076200 1803,53 1966,79 1633,74 8,42 3,79 1,27 0,92 0,42 0,55 1,233,125 0,079375 1986,27 1989,08 1649,87 8,43 3,77 1,29 1,00 0,46 0,60 1,36
3,25 0,082550 2170,26 2011,36 1666,00 8,44 3,74 1,31 1,08 0,49 0,65 1,483,375 0,085725 2355,51 2033,65 1682,14 8,45 3,72 1,34 1,16 0,53 0,70 1,61
3,5 0,088900 2542,00 2055,94 1698,27 8,46 3,69 1,36 1,24 0,57 0,75 1,743,625 0,092075 2729,76 2078,23 1714,41 8,47 3,67 1,38 1,31 0,60 0,80 1,86
3,75 0,095250 2918,76 2100,52 1730,54 8,48 3,64 1,40 1,39 0,64 0,85 1,993,875 0,098425 3109,02 2122,81 1746,68 8,48 3,62 1,42 1,46 0,67 0,90 2,12
4 0,101600 3300,54 2145,09 1762,81 8,49 3,60 1,44 1,54 0,71 0,95 2,254,125 0,104775 3493,30 2167,38 1778,94 8,50 3,57 1,46 1,61 0,74 1,00 2,39
4,25 0,107950 3687,33 2189,67 1795,08 8,51 3,55 1,48 1,68 0,78 1,05 2,524,375 0,111125 3882,60 2211,96 1811,21 8,52 3,53 1,50 1,76 0,81 1,09 2,65
4,5 0,114300 4079,13 2234,25 1827,35 8,53 3,51 1,52 1,83 0,84 1,14 2,794,625 0,117475 4276,91 2256,54 1843,48 8,54 3,48 1,54 1,90 0,87 1,19 2,92
4,75 0,120650 4475,95 2278,83 1859,62 8,55 3,46 1,55 1,96 0,91 1,23 3,064,875 0,123825 4676,24 2301,11 1875,75 8,56 3,44 1,57 2,03 0,94 1,28 3,19
5 0,127000 4877,78 2323,40 1891,89 8,56 3,42 1,59 2,10 0,97 1,32 3,335,125 0,130175 5080,58 2345,69 1908,02 8,57 3,40 1,61 2,17 1,00 1,37 3,47
5,25 0,133350 5284,63 2367,98 1924,16 8,58 3,38 1,62 2,23 1,03 1,41 3,615,375 0,136525 5489,94 2390,27 1940,29 8,59 3,36 1,64 2,30 1,06 1,46 3,75
5,5 0,1397 5696,49 2412,56 1956,43 8,60 3,34 1,66 2,36 1,09 1,50 3,895,625 0,142875 5904,31 2434,85 1972,56 8,60 3,32 1,67 2,42 1,12 1,55 4,03
L10LSTAB

76
Tabela 6.11: Comparação entre os resultados do Critério Absoluto (em verde) e do Critério Generalizado (em azul) utilizando mar Irregular. 1,75 0,044450 45,12 1557,72 1272,40 8,92 4,17 1,01 0,03 0,01 0,02 0,04
1,875 0,047625 215,32 1576,71 1285,76 8,93 4,14 1,04 0,14 0,06 0,08 0,182 0,050800 386,77 1595,71 1299,12 8,94 4,11 1,06 0,24 0,11 0,15 0,32
2,125 0,053975 559,48 1614,70 1312,49 8,96 4,08 1,09 0,35 0,16 0,21 0,462,25 0,057150 733,44 1633,69 1325,85 8,97 4,05 1,12 0,45 0,21 0,27 0,60
2,375 0,060325 908,65 1652,69 1339,21 8,98 4,02 1,15 0,55 0,25 0,33 0,752,5 0,063500 1085,12 1671,68 1352,58 8,99 4,00 1,17 0,65 0,30 0,39 0,89
2,625 0,066675 1262,84 1690,68 1365,94 9,00 3,97 1,20 0,75 0,35 0,45 1,042,75 0,069850 1441,82 1709,67 1379,30 9,01 3,94 1,22 0,84 0,39 0,51 1,18
2,875 0,073025 1622,05 1728,66 1392,67 9,02 3,91 1,24 0,94 0,44 0,57 1,333 0,076200 1803,53 1747,66 1406,03 9,03 3,89 1,27 1,03 0,48 0,63 1,48
3,125 0,079375 1986,27 1766,65 1419,39 9,04 3,86 1,29 1,12 0,52 0,69 1,633,25 0,082550 2170,26 1785,64 1432,76 9,05 3,83 1,31 1,22 0,57 0,75 1,78
3,375 0,085725 2355,51 1804,64 1446,12 9,06 3,81 1,34 1,31 0,61 0,81 1,933,5 0,088900 2542,00 1823,63 1459,48 9,07 3,78 1,36 1,39 0,65 0,87 2,09
3,625 0,092075 2729,76 1842,62 1472,85 9,08 3,76 1,38 1,48 0,69 0,92 2,243,75 0,095250 2918,76 1861,62 1486,21 9,09 3,73 1,40 1,57 0,73 0,98 2,40
3,875 0,098425 3109,02 1880,61 1499,57 9,10 3,71 1,42 1,65 0,77 1,03 2,554 0,101600 3300,54 1899,61 1512,94 9,11 3,68 1,44 1,74 0,81 1,09 2,71
4,125 0,104775 3493,30 1918,60 1526,30 9,12 3,66 1,46 1,82 0,85 1,14 2,874,25 0,107950 3687,33 1937,59 1539,66 9,13 3,64 1,48 1,90 0,89 1,20 3,03
4,375 0,111125 3882,60 1956,59 1553,03 9,14 3,61 1,50 1,98 0,93 1,25 3,194,5 0,114300 4079,13 1975,58 1566,39 9,15 3,59 1,52 2,06 0,97 1,31 3,35
4,625 0,117475 4276,91 1994,57 1579,75 9,16 3,57 1,54 2,14 1,01 1,36 3,514,75 0,120650 4475,95 2013,57 1593,12 9,16 3,55 1,55 2,22 1,04 1,41 3,68
4,875 0,123825 4676,24 2032,56 1606,48 9,17 3,52 1,57 2,30 1,08 1,47 3,845 0,127000 4877,78 2051,56 1619,84 9,18 3,50 1,59 2,38 1,12 1,52 4,01
5,125 0,130175 5080,58 2070,55 1633,21 9,19 3,48 1,61 2,45 1,15 1,57 4,175,25 0,133350 5284,63 2089,54 1646,57 9,20 3,46 1,62 2,53 1,19 1,62 4,34
5,375 0,136525 5489,94 2108,54 1659,93 9,21 3,44 1,64 2,60 1,23 1,67 4,515,5 0,139700 5696,49 2127,53 1673,30 9,21 3,42 1,66 2,68 1,26 1,72 4,68
5,625 0,142875 5904,31 2146,52 1686,66 9,22 3,40 1,67 2,75 1,30 1,77 4,855,75 0,146050 6113,37 2165,52 1700,02 9,23 3,38 1,69 2,82 1,33 1,83 5,02
5,875 0,149225 6323,69 2184,51 1713,39 9,24 3,36 1,70 2,89 1,37 1,88 5,19

77
CCaappííttuulloo 77 -- EEssttuuddooss ddee CCaassoo
Explicitados os procedimentos de cálculo e validada a formulação, é possível
aplicar a metodologia na ferramenta de otimização. Para isso foram efetuados estudos
de caso aplicando esses critérios para avaliar sua influência na configuração ótima
obtida, bem como a aplicação da parcela do peso de lastro requerido na formulação da
função objetivo para analisar o impacto da otimização conjunta do peso de lastro e do
comprimento da rota (item 5.2).
Nos itens subsequentes apresentam-se os cenários considerados para a
otimização da rota e os resultados obtidos para a otimização considerando a estabilidade
como penalidade e considerando o peso de lastro.
7.1 CENÁRIOS E PARÂMETROS DO ALGORITMO
Para os estudos de caso foram utilizados dois cenários distintos a fim de avaliar
a influência da estabilidade na escolha de uma rota de duto, sendo apresentados os
parâmetros associados a cada cenário nos itens 7.1.1, 7.1.2 e 7.1.3. Adicionalmente, no
item 7.1.4 é explicitado os parâmetros adotados para a otimização do problema.
7.1.1 Cenário
Para o estudo de caso foram adotados dois cenários hipotéticos, tendo um uma
batimetria mais acidentada (Figura 7.1) e o outro mais suave (Figura 7.2).
Além disso, foi feito um tratamento na profundidade da lâmina, onde o mesmo
cenário foi representado em águas mais rasas (a menos da batimetria mais acidentada),
em águas intermediárias e em águas mais profundas d’água (Tabela 7.1).
Essa variação da lamina d’água tem o intuito de avaliar a influência das cargas
hidrodinâmicas. Desta forma, em águas mais rasas avaliou-se a influência da onda e da
corrente separadamente e em conjunto, já o cenário em águas intermediárias, possui
pouco influência de onda, sendo a carga de corrente mais significativa e por fim o
cenário mais profundo avalia a corrente isoladamente, uma vez que as cargas de onda
não são relevantes nessas profundidades.
Adicionalmente, em águas rasas e intermediárias foi empregado um solo
arenoso, enquanto em águas profundas foi adotado um solo argiloso, com os dados de
solo apresentados na Tabela 7.1.
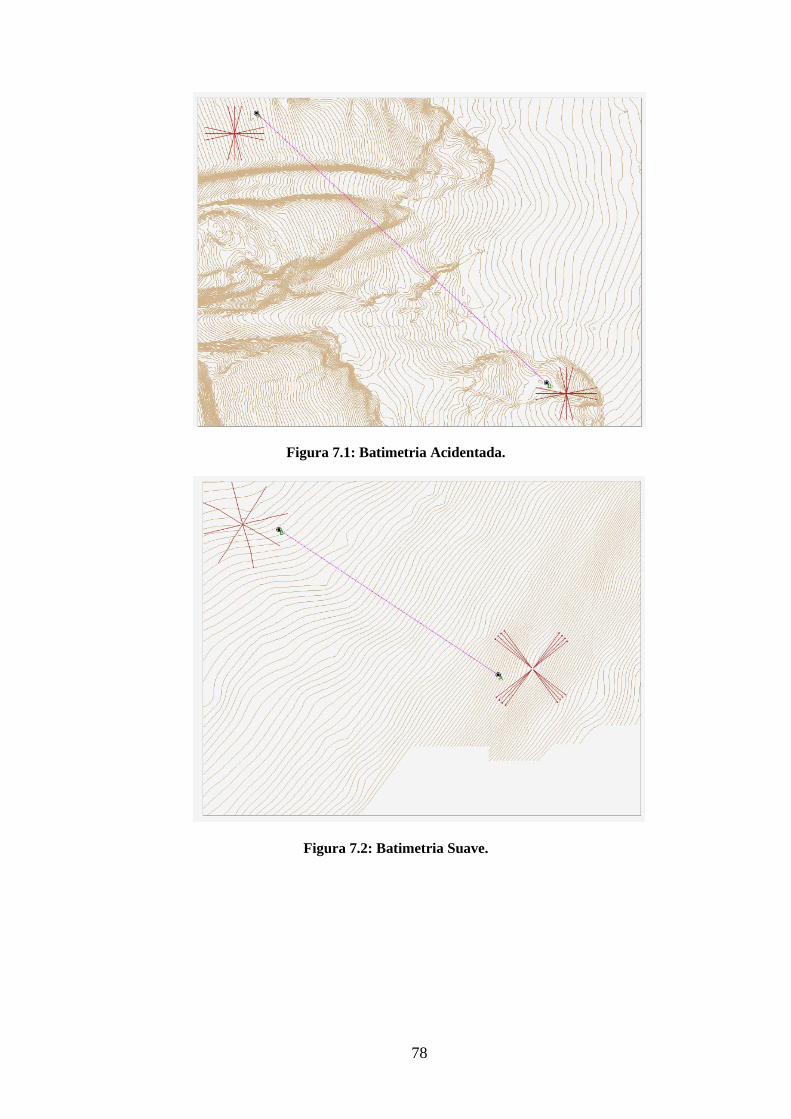
78
Figura 7.1: Batimetria Acidentada.
Figura 7.2: Batimetria Suave.

79
Tabela 7.1: Profundidade das extremidades da rota.
Batimetria
Acidentada Suave
Águas Rasas -
A: 529 m
B: 14 m
Águas Intermediárias
A: 94 m
B: 927 m
A: 639 m
B: 124 m
Águas Profundas
A: 944 m
B: 1777 m
A: 1549 m
B: 1034 m
Tabela 7.2: Propriedades físicas do solo.
Propriedades Águas Rasas
e Intermediárias Águas Profundas
Coeficiente de atrito do solo µ 0.7 0.4
Peso seco do solo sγ - 16000 N/m3
Peso molhado do solo 'sγ 13500 N/m3 -
Resistência não-drenada da argila us - 10000 N/m2
7.1.2 Características Físicas e Geométricas do Duto
Os dutos adotados para a otimização da rota foram associados a cada batimetria,
Batimetria Acidentada (Figura 7.1) e Batimetria Suave (Figura 7.2), sendo os dados
apontados na Tabela 7.3.
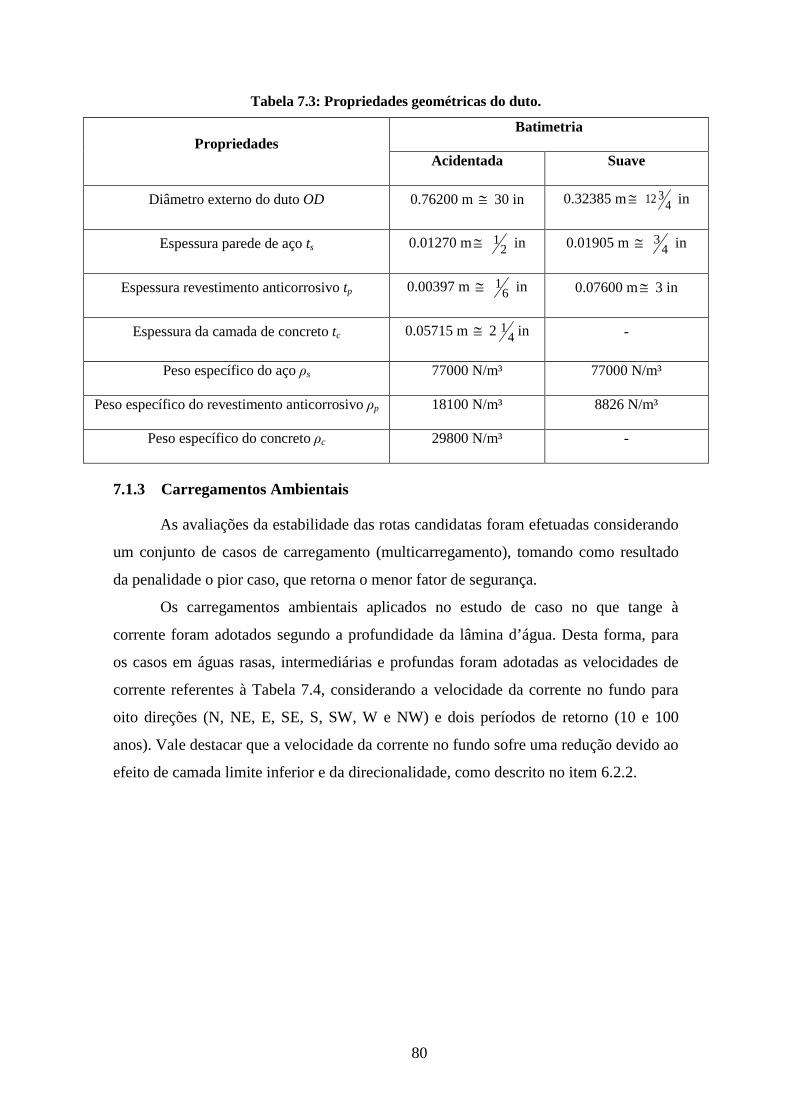
80
Tabela 7.3: Propriedades geométricas do duto.
Propriedades Batimetria
Acidentada Suave
Diâmetro externo do duto OD 0.76200 m ≅ 30 in 0.32385 m≅ 312 4 in
Espessura parede de aço ts 0.01270 m≅ 12 in 0.01905 m ≅ 3
4 in
Espessura revestimento anticorrosivo tp 0.00397 m ≅ 16 in 0.07600 m≅ 3 in
Espessura da camada de concreto tc 0.05715 m ≅ 2 14 in -
Peso específico do aço ρs 77000 N/m³ 77000 N/m³
Peso específico do revestimento anticorrosivo ρp 18100 N/m³ 8826 N/m³
Peso específico do concreto ρc 29800 N/m³ -
7.1.3 Carregamentos Ambientais
As avaliações da estabilidade das rotas candidatas foram efetuadas considerando
um conjunto de casos de carregamento (multicarregamento), tomando como resultado
da penalidade o pior caso, que retorna o menor fator de segurança.
Os carregamentos ambientais aplicados no estudo de caso no que tange à
corrente foram adotados segundo a profundidade da lâmina d’água. Desta forma, para
os casos em águas rasas, intermediárias e profundas foram adotadas as velocidades de
corrente referentes à Tabela 7.4, considerando a velocidade da corrente no fundo para
oito direções (N, NE, E, SE, S, SW, W e NW) e dois períodos de retorno (10 e 100
anos). Vale destacar que a velocidade da corrente no fundo sofre uma redução devido ao
efeito de camada limite inferior e da direcionalidade, como descrito no item 6.2.2.
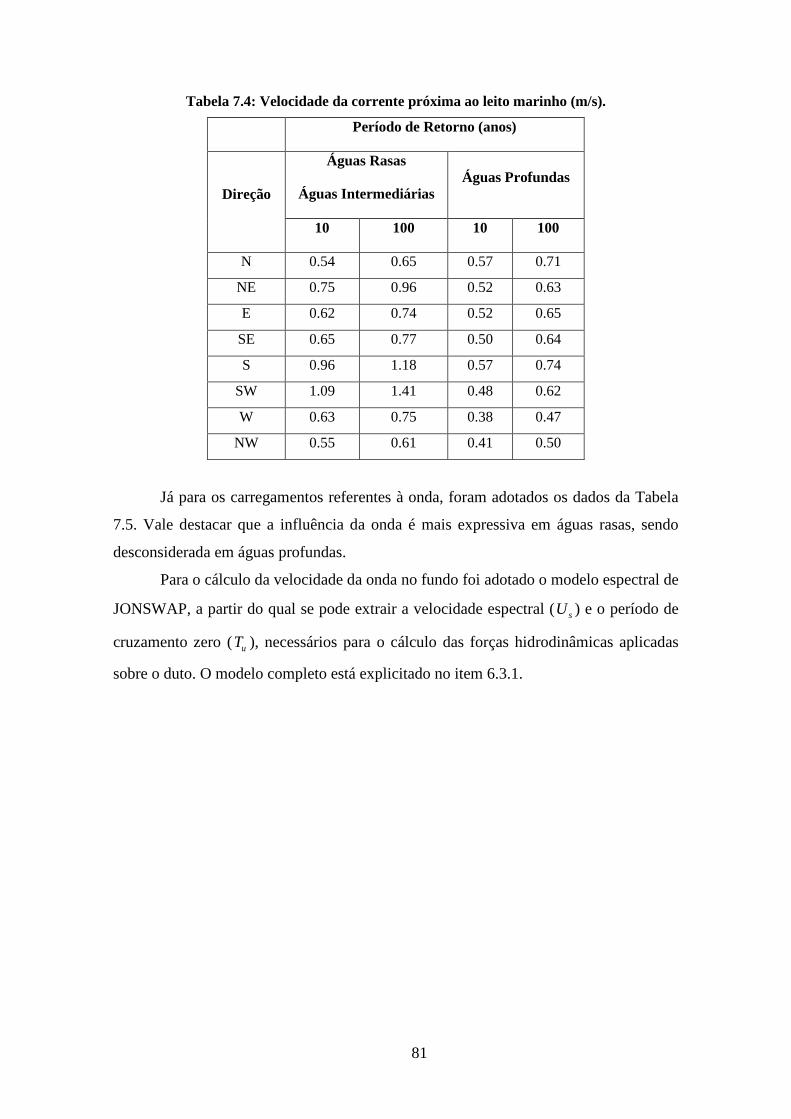
81
Tabela 7.4: Velocidade da corrente próxima ao leito marinho (m/s).
Período de Retorno (anos)
Direção
Águas Rasas
Águas Intermediárias Águas Profundas
10 100 10 100
N 0.54 0.65 0.57 0.71
NE 0.75 0.96 0.52 0.63
E 0.62 0.74 0.52 0.65
SE 0.65 0.77 0.50 0.64
S 0.96 1.18 0.57 0.74
SW 1.09 1.41 0.48 0.62
W 0.63 0.75 0.38 0.47
NW 0.55 0.61 0.41 0.50
Já para os carregamentos referentes à onda, foram adotados os dados da Tabela
7.5. Vale destacar que a influência da onda é mais expressiva em águas rasas, sendo
desconsiderada em águas profundas.
Para o cálculo da velocidade da onda no fundo foi adotado o modelo espectral de
JONSWAP, a partir do qual se pode extrair a velocidade espectral ( sU ) e o período de
cruzamento zero ( uT ), necessários para o cálculo das forças hidrodinâmicas aplicadas
sobre o duto. O modelo completo está explicitado no item 6.3.1.

82
Tabela 7.5: Parâmetros de onda.
Direção Parâmetro Período de Retorno (anos)
10 100
N Altura significativa Hs 4.74 5.01 Período de pico TP 9.20 9.56
NE Altura significativa Hs 4.88 5.17 Período de pico TP 9.47 9.77
E Altura significativa Hs 4.34 4.87 Período de pico TP 9.90 10.40
SE Altura significativa Hs 5.72 6.53 Período de pico TP 10.28 11.63
S Altura significativa Hs 6.19 7.10 Período de pico TP 13.54 14.35
SW Altura significativa Hs 7.16 7.84 Período de pico TP 14.78 15.55
W - NW Altura significativa Hs 3.57 3.88 Período de pico TP 8.22 8.51
7.1.4 Parâmetros do processo de otimização
O modelo utilizado para os estudos de caso levou em consideração as seguintes
ponderações no tocante da penalidade, como mostrado na Figura 7.3.
Já com relação à configuração do Algoritmo, a Figura 7.4 mostra o tamanho da
população e a configuração dos parâmetros para os operadores genéticos, enquanto a
Figura 7.5 apresenta o critério de parada adotado.
Figura 7.3: Configuração da penalidades.

83
Figura 7.4: Parâmetros do Algoritmo.
Figura 7.5: Critérios de Parada.
7.2 OTIMIZAÇÃO COM A ESTABILIDADE COMO PENALIDADE
A fim de avaliar a influência da estabilidade hidrodinâmica na otimização da
rota, foram executadas otimizações desativando e ativando os critérios de estabilidade,
considerando a estabilidade como uma restrição do problema (item 5.3.7).
Para o critério de estabilidade generalizada, tomou-se o valor de deslocamento
admissível igual a 10 vezes o diâmetro do duto. Para os cenários em águas profundas,
avaliou-se e apenas o critério de estabilidade absoluta, já que de acordo com a DNV RP-
F109 [2] o critério generalizado não é adequado para águas profundas. Adicionalmente,
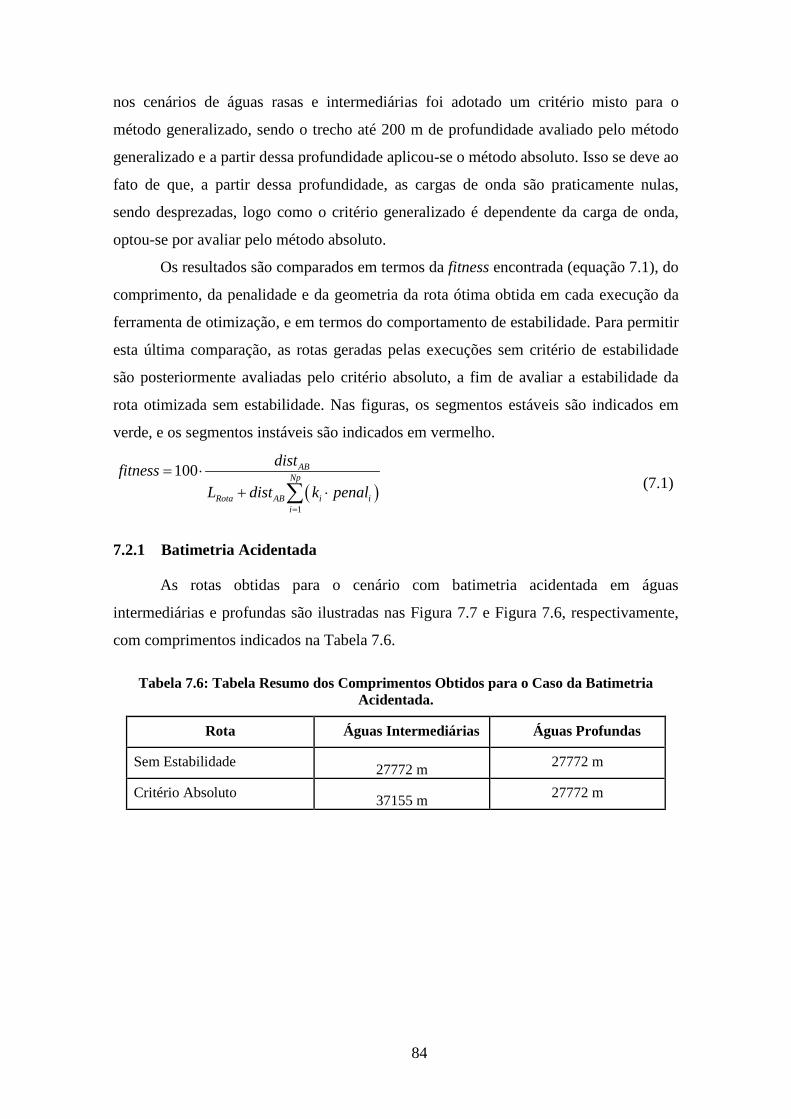
84
nos cenários de águas rasas e intermediárias foi adotado um critério misto para o
método generalizado, sendo o trecho até 200 m de profundidade avaliado pelo método
generalizado e a partir dessa profundidade aplicou-se o método absoluto. Isso se deve ao
fato de que, a partir dessa profundidade, as cargas de onda são praticamente nulas,
sendo desprezadas, logo como o critério generalizado é dependente da carga de onda,
optou-se por avaliar pelo método absoluto.
Os resultados são comparados em termos da fitness encontrada (equação 7.1), do
comprimento, da penalidade e da geometria da rota ótima obtida em cada execução da
ferramenta de otimização, e em termos do comportamento de estabilidade. Para permitir
esta última comparação, as rotas geradas pelas execuções sem critério de estabilidade
são posteriormente avaliadas pelo critério absoluto, a fim de avaliar a estabilidade da
rota otimizada sem estabilidade. Nas figuras, os segmentos estáveis são indicados em
verde, e os segmentos instáveis são indicados em vermelho.
( )1
100 ABNp
Rota AB i ii
distfitnessL dist k penal
=
= ⋅+ ⋅∑
(7.1)
7.2.1 Batimetria Acidentada
As rotas obtidas para o cenário com batimetria acidentada em águas
intermediárias e profundas são ilustradas nas Figura 7.7 e Figura 7.6, respectivamente,
com comprimentos indicados na Tabela 7.6.
Tabela 7.6: Tabela Resumo dos Comprimentos Obtidos para o Caso da Batimetria Acidentada.
Rota Águas Intermediárias Águas Profundas
Sem Estabilidade 27772 m 27772 m
Critério Absoluto 37155 m 27772 m

85
7.2.1.1 Batimetria Acidentada – Águas Profundas
Figura 7.6: Resultado das Rotas associadas à Batimetria Acidentada em Águas Profundas.
Tabela 7.7: Resumo dos Resultados da Batimetria Acidentada para Águas Profundas.
Rota Comprimento
Rota
Melhor
Fitness
Penalidade
Estabilidade EstabLat ABpenal dist⋅
Sem Estabilidade
Critério Absoluto 27772 m 92.88 0.0 0.0
Avaliando o caso da Batimetria Acidentada em águas profundas, pode-se
observar que o duto apresenta uma configuração estável, uma vez que as cargas
hidrodinâmicas são menos significativas à medida que se eleva a profundidade, sendo
considerada apenas a corrente de fundo. Além disso, a configuração do duto propicia
essa estabilidade, conferindo o lastro necessário.
Vale ressaltar que em águas profundas, o estudo do método generalizado não é
adequado, por isso foi analisado apenas o método absoluto.

86
Além disso, a rota otimizada sem estabilidade possui a mesma configuração que
a analisada pelo método absoluto, divergindo da reta AB apenas para contornar o cânion
e não violar a penalidade de declividade longitudinal.
7.2.1.2 Batimetria Acidentada – Águas Intermediárias
Figura 7.7: Resultado das Rotas associadas à Batimetria Acidentada em Águas Intermediárias.
Tabela 7.8: Resumo dos Resultados da Batimetria Acidentada para Águas Intermediárias.
Rota Comprimento
Rota
Melhor
Fitness
Penalidade
Estabilidade EstabLat ABpenal dist⋅
Sem Estabilidade 27772 m 92.88 0.0 0.0
Critério Absoluto 37155 m 39.66 1.08 27858 m
Já no caso para águas intermediárias, observa-se que a configuração da rota
otimizada considerando a estabilidade possui um comprimento maior que a rota
otimizada sem estabilidade. (Tabela 7.8). Isso ocorre principalmente, pois a rota
avaliada utilizando estabilidade tende a se alinhar com o carregamento ambiental
preponderante (NE-SW e N-S) para evitar a incidência direta no duto e

87
concomitantemente evita declividades longitudinais elevadas para não violar a restrição
de declividade, corroborando o trecho 12 da rota.
Vale destacar que o trecho 12 possui um pequeno comprimento de rota instável
devido à declividade transversal elevada, isso pode ser contornado numa etapa de
otimização local, no qual consideraria pequenas variações para ajustar a rota adotando
maiores detalhes.
Adicionalmente o valor de EstabLat ABpenal dist⋅ reflete o quanto a rota desviou do
valor ideal ABdist (desconsiderando as penalidades como explicitado em 5.2),
fornecendo uma estimativa de quantos metros a rota é desviada para atender ao critério
de estabilidade ou pelo menos reduzir a instabilidade.
Já a rota otimizada desativando o critério de estabilidade tende a um
comprimento menor, descendo as curvas de nível de forma mais suave para atender ao
critério de declividade longitudinal. Contudo, pode-se observar que calculando a
estabilidade absoluta para essa rota ótima, o duto fica inteiramente instável, uma vez
que grande parte do seu comprimento está praticamente sob influência direta do
carregamento ambiental preponderante, levando a uma grande penalização associada à
estabilidade.
7.2.2 Batimetria Suave
As rotas obtidas para os cenários com batimetria suave, em águas rasas,
intermediárias e profundas, são apresentadas nas Figura 7.10, Figura 7.9 e Figura 7.8
respectivamente, sendo o resultado em termos de comprimento da rotas indicado na
Tabela 7.9.

88
Tabela 7.9: Tabela Resumo dos Comprimentos Obtidos para o Caso da Batimetria Suave.
Rota Águas Rasas
(sem Onda)
Águas Rasas
(sem Corrente)
Águas Rasas
Águas Intermediárias
Águas Profundas
Sem Estabilidade 12530 m 12530 m 12530 m 12530 m 12530 m
Critério Absoluto 15018 m 13478 m 15552 m 14918 m 12530 m
Critério Generalizado - 13263 m 15001 m - -
7.2.2.1 Batimetria Suave – Águas Profundas
Figura 7.8: Resultado das Rotas associadas à Batimetria Suave em Águas Profundas.
Tabela 7.10: Resumo dos Resultados da Batimetria Suave para Águas Profundas.
Rota Comprimento
Rota
Melhor
Fitness
Penalidade
Estabilidade EstabLat ABpenal dist⋅
Sem Estabilidade
Critério Absoluto 12530 m 99.54 0.0 0.0

89
Analisando o resultado para águas profundas na Figura 7.8, observa-se que as
rotas com e sem estabilidade são coincidentes, e estáveis de acordo com o critério de
estabilidade absoluta. Isto se deve ao fato de a estabilidade ser menos crítica em águas
profundas, já que as cargas ambientais são reduzidas, com influência apenas da corrente
de fundo. Além disso, as configurações físicas e geométricas do duto garantem sua
estabilidade, fornecendo o peso necessário para o não deslocamento da tubulação.
7.2.2.2 Batimetria Suave – Águas Intermediárias
Figura 7.9: Resultado das Rotas associadas à Batimetria Suave em Águas Intermediárias.
Tabela 7.11: Resumo dos Resultados da Batimetria Suave para Águas Intermediárias.
Rota Comprimento
Rota
Melhor
Fitness
Penalidade
Estabilidade EstabLat ABpenal dist⋅
Sem Estabilidade 12530 m 99.54 0.0 0.0
Critério Absoluto 14943 m 65.84 0.32 3992 m
Observando-se os resultados para águas intermediárias na Figura 7.9, verifica-se
que a rota gerada pela execução do procedimento de otimização sem o critério de
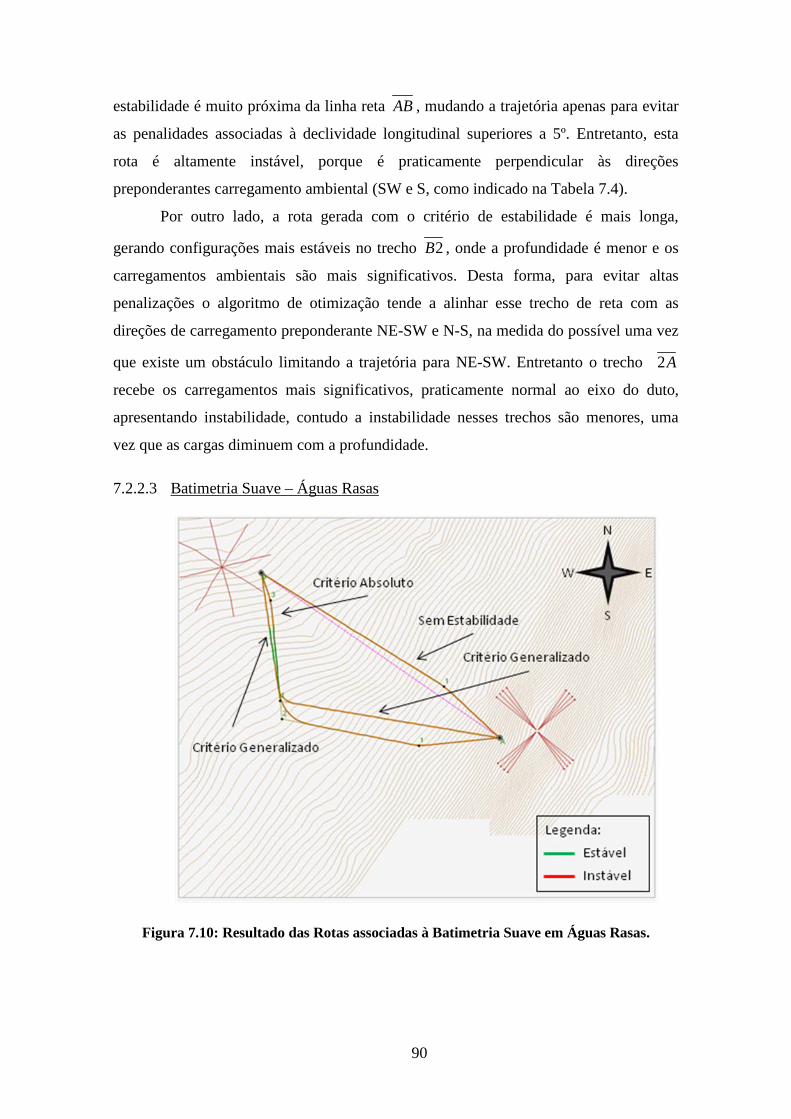
90
estabilidade é muito próxima da linha reta AB , mudando a trajetória apenas para evitar
as penalidades associadas à declividade longitudinal superiores a 5º. Entretanto, esta
rota é altamente instável, porque é praticamente perpendicular às direções
preponderantes carregamento ambiental (SW e S, como indicado na Tabela 7.4).
Por outro lado, a rota gerada com o critério de estabilidade é mais longa,
gerando configurações mais estáveis no trecho 2B , onde a profundidade é menor e os
carregamentos ambientais são mais significativos. Desta forma, para evitar altas
penalizações o algoritmo de otimização tende a alinhar esse trecho de reta com as
direções de carregamento preponderante NE-SW e N-S, na medida do possível uma vez
que existe um obstáculo limitando a trajetória para NE-SW. Entretanto o trecho 2A
recebe os carregamentos mais significativos, praticamente normal ao eixo do duto,
apresentando instabilidade, contudo a instabilidade nesses trechos são menores, uma
vez que as cargas diminuem com a profundidade.
7.2.2.3 Batimetria Suave – Águas Rasas
Figura 7.10: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas.

91
Tabela 7.12: Resumo dos Resultados da Batimetria Suave para Águas Rasas.
Rota Comprimento
Rota
Melhor
Fitness
Penalidade
Estabilidade EstabLat ABpenal dist⋅
Sem Estabilidade 12530 m 99.54 0.0 0.0
Critério Absoluto 15552 m 49.68 0.77 9605 m
Critério Generalizado 15001 m 53.77 0.66 8233 m
Analisando os resultados para águas rasas na Figura 7.10, verifica-se que as
rotas geradas com os critérios de estabilidade são mais longas que a analisada sem o
critério de estabilidade. Adicionalmente, comparando a rota pelo critério absoluto tanto
com a otimizada sem estabilidade (Tabela 7.12) quanto com a otimizada pelo critério
absoluto em águas intermediarias (Tabela 7.11), vê-se que essa ainda sim é maior. Isso é
intuitivo, uma vez que as cargas ambientais são maiores em águas rasas.
Além disso, assim como em águas intermediárias, a configuração da rota pelo
critério absoluto tende a evitar o carregamento direto nas direções preponderantes NE-
SW e N-S, tentando alinhar o trecho 2B com essas direções. Vale destacar que ainda
sim o trecho 3B permanece instável devido à intensidade elevada dos carregamentos
ambientais em águas rasas. Adicionalmente o trecho 2A recebe os carregamentos mais
significativos, praticamente normal ao eixo do duto, apresentando instabilidade,
contudo a instabilidade nesses trechos são menores, uma vez que as cargas diminuem
com a profundidade.
Além disso, comparando a rota otimizada pelo critério absoluto com a otimizada
pelo critério generalizado, verifica-se se que o comprimento da rota é menor para o
generalizado bem como a penalidade de estabilidade e consequentemente a fitness
associada é melhor. Isso é esperado, pois avaliando pelo método generalizado, os
deslocamentos permissíveis são maiores, retornando maiores fatores de segurança.

92
7.2.2.4 Batimetria Suave – Águas Rasas: Estudo dos Carregamentos Ambientais
Figura 7.11: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas sem Corrente.
Tabela 7.13: Resumo dos Resultados da Batimetria Suave para Águas Rasas sem Corrente.
Rota Comprimento
Rota Melhor Fitness
Penalidade
Estabilidade EstabLat ABpenal dist⋅
Sem Estabilidade 12530 m 99.54 0.0 0.0
Critério Absoluto 13478 m 71.31 0.32 3992 m
Critério Generalizado 13263 m 84.82 0.12 1497 m
Adicionalmente, avaliando o mesmo cenário para águas rasas, entretanto
avaliando a influência da onda isoladamente (Figura 7.11), verifica-se que as rotas
geradas pelos critérios absoluto e generalizado reduzem de comprimento (Tabela 7.13),
uma vez que a carga ambiental total diminui.
Além disso, as rotas com os critérios de estabilidade possuem uma configuração
de rota no trecho 2B que tende a evitar o carregamento direto nas direções

93
preponderantes NE-SW e N-S, assim como nos demais casos. Vale destacar que o
trecho 2A é estável, uma vez que as cargas de onda são insignificantes quando se eleva
a profundidade e a carga de corrente está sendo desconsiderada, logo o duto não sofre
solicitações. O mesmo ocorre com a rota otimizada sem estabilidade.
Vale destacar que a rota otimizada pelo critério generalizado possui uma
configuração menor que a otimizada pelo absoluto, bem como possui uma fitness maior
e uma penalidade menor, como é esperado.
Figura 7.12: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas sem Onda.
Tabela 7.14: Resumo dos Resultados da Batimetria Suave para Águas Rasas sem Onda.
Rota Comprimento
Rota Melhor Fitness
Penalidade
Estabilidade EstabLat ABpenal dist⋅
Sem Estabilidade 12530 m 99.54 0.0 0.0
Critério Absoluto 15018 m 66.71 0.30 3742 m
Por fim, avaliando o mesmo cenário para águas rasas, entretanto avaliando a
influência da corrente isoladamente (Figura 7.12), verifica-se que a rota gerada pelo
critério absoluto reduz de comprimento (Tabela 7.14), quando comparada com a rota

94
otimizada com o carregamento ambiental completo (Tabela 7.12), contudo fornece um
tamanho maior que a avaliada só com onda (Tabela 7.13). Isso é explicado, pois a
corrente influencia a rota em toda a sua extensão, enquanto a onde influencia apenas em
águas rasas.
Desta forma, para evitar elevadas penalizações na região de águas rasas 1B , o
algoritmo tende a alinhar a rota com os carregamentos preponderantes. Já a região mais
profunda 1A possui os carregamentos incidindo praticamente normal ao duto,
justificando a instabilidade. Vale destacar que o estudo pelo método generalizado não é válido sem
carregamento de onda, por esse motivo só foi avaliado o método absoluto.
7.3 OTIMIZAÇÃO COM A ESTABILIDADE PARA DETERMINAR O PESO DE
LASTRO
A partir dos resultados da otimização considerando a estabilidade como uma
penalidade do problema, pode-se observar que a estabilidade possui significativa
influência na escolha da rota. Visando isso, propôs-se otimizar o peso do lastro
necessário para estabilizar uma determinada rota, uma vez que muitas vezes adotar uma
rota com comprimento maior para obter estabilidade pode se tornar dispendioso.
Assim, o presente trabalho propôs, para os mesmos cenários descritos no item
7.1, avaliar o peso mínimo requerido para estabilizar uma determinada rota. Para isso,
foi inserida uma parcela na função objetivo que considera a o peso total de lastro como
descrito em 5.2. Além disso, o peso de lastro foi discretizado de 100 em 100 N/m e só
confere a estabilidade quanto o peso do elemento resulta em um fator de segurança
maior que 1.1.
Portanto para avaliar a influência do peso de lastro requerido na rota, foram
executadas otimizações variando a ponderação relativa ao comprimento do duto ( dutok )
e a ponderação relativa ao lastro ( lastrok ). Assim, quanto maior for o dutok , menor a rota,
entretanto maior a peso de lastro necessário e vice-e-versa. Adicionalmente foi avaliado
tanto o critério absoluto quanto o generalizado, sendo que para este último tomou-se o
valor de deslocamento admissível igual a 10 vezes o diâmetro do duto.
Os resultados são comparados em termos da fitness encontrada (equação 7.2), do
comprimento, do peso de lastro e da geometria da rota ótima obtida em cada execução
da ferramenta de otimização. O resultado completo do peso de lastro requerido para
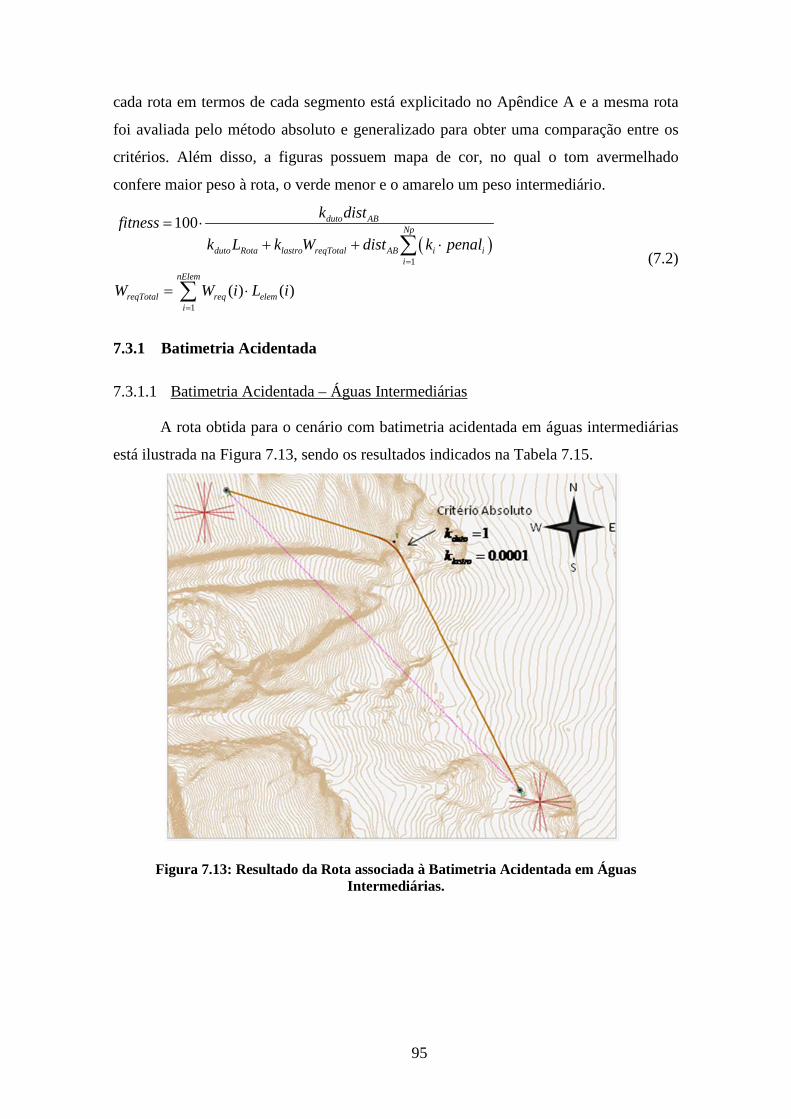
95
cada rota em termos de cada segmento está explicitado no Apêndice A e a mesma rota
foi avaliada pelo método absoluto e generalizado para obter uma comparação entre os
critérios. Além disso, a figuras possuem mapa de cor, no qual o tom avermelhado
confere maior peso à rota, o verde menor e o amarelo um peso intermediário.
( )1
1
100
( ) ( )
duto ABNp
duto Rota lastro reqTotal AB i ii
nElem
reqTotal req elemi
k distfitnessk L k W dist k penal
W W i L i
=
=
= ⋅+ + ⋅
= ⋅
∑
∑
(7.2)
7.3.1 Batimetria Acidentada
7.3.1.1 Batimetria Acidentada – Águas Intermediárias
A rota obtida para o cenário com batimetria acidentada em águas intermediárias
está ilustrada na Figura 7.13, sendo os resultados indicados na Tabela 7.15.
Figura 7.13: Resultado da Rota associada à Batimetria Acidentada em Águas Intermediárias.

96
Tabela 7.15: Resumo dos Resultados da Batimetria Acidentada para Águas Intermediárias.
Rota Ponderação Comprimento
Rota Melhor
Fitness Peso
Total Peso
Médio
Critério Absoluto 10.0001
duto
lastro
kk
==
27789 m 69.35 94*10³ KN 3385 N/m
Vale destacar que as propriedades do duto são as mesmas que as indicadas na
Tabela 7.3, a menos da espessura de concreto que não está sendo considerada, já que o
intuito do estudo é avaliar exatamente o peso de lastro necessário.
Adicionalmente, foi adotado uma ponderação maior na declividade neste caso,
de 5 para 10, uma vez que a parcela de peso de lastro é elevada, sobrepondo à
penalidade de declividade.
No tocante ao resultado pode-se observar que o duto possui uma configuração
parecida com a otimizada pelo estudo anterior desconsiderando a estabilidade, dando
uma noção de quanto lastro é necessário para alcançar a estabilidade hidrodinâmica.
Além disso, pode-se verificar também que o peso de lastro requerido possui pouca
variação ao longo da rota, entre 3300 a 3500 N/m, como mostrado no item A.1 do
apêndice, tendo valores mais elevados onde a declividade transversal é maior como
ilustra os trechos com um vermelho mais intenso na Figura 7.13.

97
7.3.1.2 Batimetria Acidentada – Águas Intermediárias: Estudo Comparativo Camada
de Concreto x Enterramento
Figura 7.14: Resultado da Rota associada à Batimetria Acidentada em Águas Intermediárias Otimizada pela Estabilidade como Penalidade.
Tabela 7.16: Resumo do Resultado da Batimetria Acidentada para Águas Intermediárias comparando com a Rota Otimizada pela Estabilidade como Penalidade.
Rota Comprimento
Rota Fitness Peso Total
Peso
Médio
Rota Otimizada
pelo Peso
Requerido
27789 m 69.35 94*10³ KN 3385 N/m
Rota Otimizada
pela Penalidade
de Estabilidade
37155 m 53.18 113*10³ KN 3053 N/m
Além disso, a fim de comparar com o modelo otimizado pelo critério de
estabilidade como penalidade, tomou-se a rota e avaliou-se o peso de lastro necessário
para estabilizá-la (Figura 7.16 e A.1). Vale observar que o peso de lastro médio é menor

98
que o obtido para a rota otimizada pelo peso requerido, entretanto como a rota é mais
extensa o peso total se torna mais elevado (Tabela 7.16).
Adicionalmente, comparando com o peso de lastro usado no modelo para a
estabilidade como penalidade, observa-se que o peso mínimo requerido calculado é
menor (Tabela 7.17). Isso ocorre, pois no modelo de estabilidade como penalidade foi
adotada uma espessura de concreto (Tabela 7.3) e no modelo do peso requerido
adicionou-se apenas uma parcela a mais no peso total do duto, sem considerar uma
espessura associada. Logo considerando uma espessura de concreto, o diâmetro
hidrodinâmico do duto aumenta, elevando também o empuxo e consequentemente
reduzindo o peso submerso do duto (item 6.1.1). Esse fator influencia
significativamente na estabilidade do duto, justificando pontos instáveis na rota obtida
pela estabilidade como penalidade (Figura 7.7), mesmo possuindo um peso de lastro
maior (Tabela 7.17).
Tabela 7.17: Comparação dos Pesos de Lastro Associados a Rota Otimizada pela Estabilidade como Penalidade.
Peso Total Peso Médio
Peso Adotado
com a Espessura
de Concreto
164*10³ KN 4425 N/m
Peso Mínimo
Requerido 113*10³ KN 3053 N/m
A fim de corroborar a conclusão acima, foi simulada a mesma rota obtida pela
otimização da estabilidade como penalidade apresentada na Figura 7.7 usando o mesmo
peso de lastro de 4425 N/m, contudo desconsiderando a espessura de concreto. Desta forma, o
diâmetro hidrodinâmico considerado nos cálculos foi menor e o peso submerso maior (Tabela
7.18). Assim a rota apresentou estabilidade em toda a extensão, conforme mostrado na Figura
7.15.
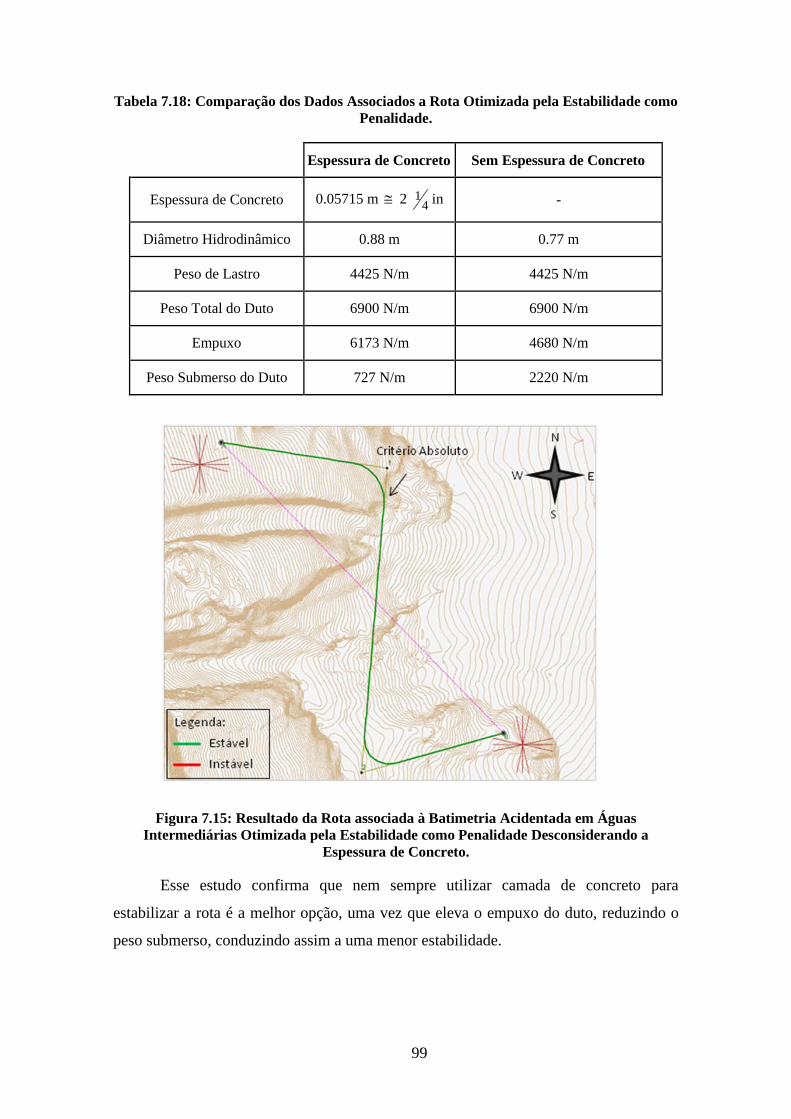
99
Tabela 7.18: Comparação dos Dados Associados a Rota Otimizada pela Estabilidade como Penalidade.
Espessura de Concreto Sem Espessura de Concreto
Espessura de Concreto 0.05715 m ≅ 2 14 in -
Diâmetro Hidrodinâmico 0.88 m 0.77 m
Peso de Lastro 4425 N/m 4425 N/m
Peso Total do Duto 6900 N/m 6900 N/m
Empuxo 6173 N/m 4680 N/m
Peso Submerso do Duto 727 N/m 2220 N/m
Figura 7.15: Resultado da Rota associada à Batimetria Acidentada em Águas Intermediárias Otimizada pela Estabilidade como Penalidade Desconsiderando a
Espessura de Concreto.
Esse estudo confirma que nem sempre utilizar camada de concreto para
estabilizar a rota é a melhor opção, uma vez que eleva o empuxo do duto, reduzindo o
peso submerso, conduzindo assim a uma menor estabilidade.

100
7.3.2 Batimetria Suave
7.3.2.1 Batimetria Suave – Águas Intermediárias
As rotas obtidas para o cenário com batimetria suave em águas intermediárias
estão ilustradas na Figura 7.16, sendo os resultados indicados na Tabela 7.19.
Figura 7.16: Resultado das Rotas associadas à Batimetria Suave em Águas Intermediárias.
Tabela 7.19: Resumo dos Resultados da Batimetria Suave para Águas Intermediárias.
Rota Ponderação Comprimento
Rota
Melhor
Fitness
Peso Total Peso
Médio
Critério
Absoluto
10.01
duto
lastro
kk
==
14588 m 44.75 1328 KN 91 N/m
100.01
duto
lastro
kk
==
13461 m 79.99 2127 KN 158 N/m
500.01
duto
lastro
kk
==
12619 m 94.29 3054 KN 242 N/m

101
O estudo da batimetria suave utilizou integralmente as propriedades
apresentadas no item 7.1, dando plenas condições de comparação com estudo anterior
apresentado no item 7.2.
Desta forma, pode-se observar que o resultado do critério absoluto com 1dutok =
se aproxima da rota otimizada com a estabilidade como penalidade (item 7.2.2). Além
disso, a medida que o dutok aumenta a rota tende a reduzir o comprimento, contudo o
peso total de lastro aumenta, sendo a rota com 50dutok = bem proxima da otimizada
sem estabilidade no item 7.2.2.
Analisando a rota com 1dutok = pode-se observar que o trecho mais raso possui
peso de lastro 0 (item A.2 do Apêndice) isso porque o algoritmo tende a alinhar esse
trecho com as cargas preponderantes de NE-SW e N-S. Como nessas profundidades o
carregamento ambiental é mais significativo, caso o duto receba a ação direta, os pesos
de lastro associados seriam muito elevados. Contudo, na parte mais profunda o
carregamento preponderante atua quase que diretamente sobre o duto, necessitando de
um pequeno peso (100 N/m) para a rota ficar estável.
Já a rota com 50dutok = , o que governa é o comprimento da rota, assim o peso
requerido é mais elevado. A rota com 10dutok = apresenta uma configuração
intermediária, tentando concomitantemente redizir o comprimento da rota e o peso de
lastro necessário para estabilizá-la.
7.3.2.2 Batimetria Suave – Águas Rasas
As rotas obtidas para o cenário com batimetria suave em águas rasas estão
ilustradas nas Figura 7.17 e Figura 7.18, sendo os resultados indicados na Tabela 7.20.
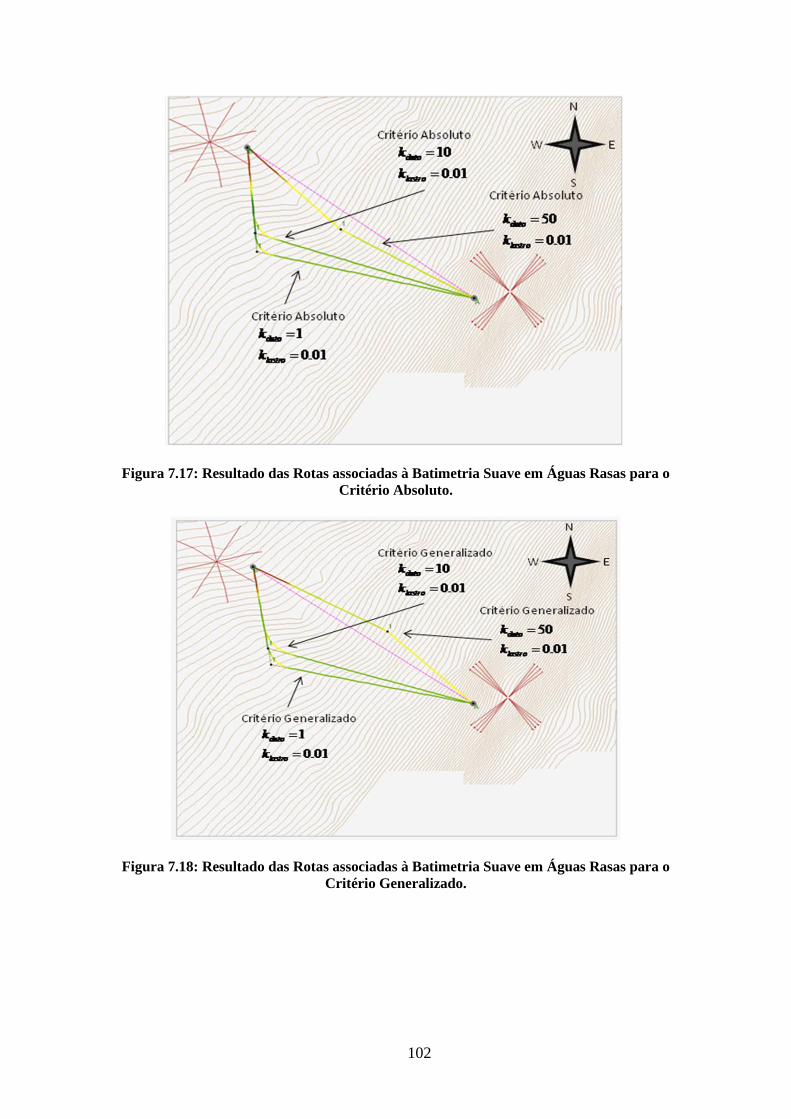
102
Figura 7.17: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o Critério Absoluto.
Figura 7.18: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o Critério Generalizado.
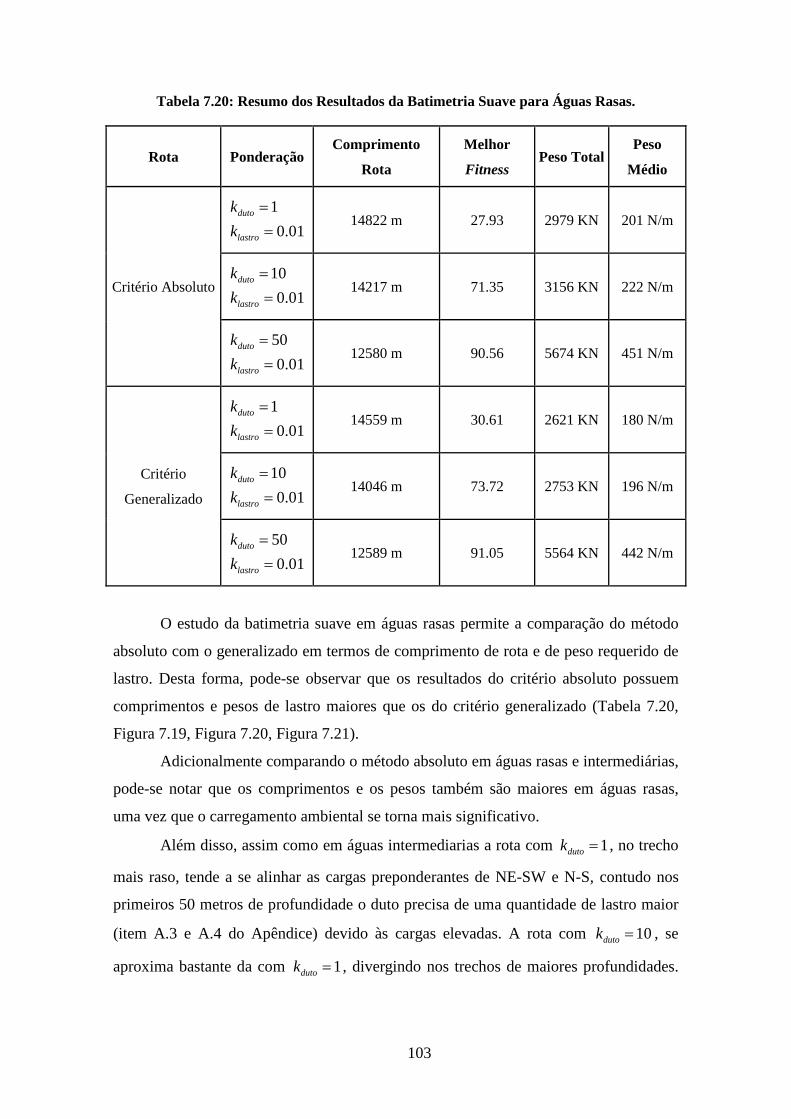
103
Tabela 7.20: Resumo dos Resultados da Batimetria Suave para Águas Rasas.
Rota Ponderação Comprimento
Rota
Melhor
Fitness Peso Total
Peso
Médio
Critério Absoluto
10.01
duto
lastro
kk
==
14822 m 27.93 2979 KN 201 N/m
100.01
duto
lastro
kk
==
14217 m 71.35 3156 KN 222 N/m
500.01
duto
lastro
kk
==
12580 m 90.56 5674 KN 451 N/m
Critério
Generalizado
10.01
duto
lastro
kk
==
14559 m 30.61 2621 KN 180 N/m
100.01
duto
lastro
kk
==
14046 m 73.72 2753 KN 196 N/m
500.01
duto
lastro
kk
==
12589 m 91.05 5564 KN 442 N/m
O estudo da batimetria suave em águas rasas permite a comparação do método
absoluto com o generalizado em termos de comprimento de rota e de peso requerido de
lastro. Desta forma, pode-se observar que os resultados do critério absoluto possuem
comprimentos e pesos de lastro maiores que os do critério generalizado (Tabela 7.20,
Figura 7.19, Figura 7.20, Figura 7.21).
Adicionalmente comparando o método absoluto em águas rasas e intermediárias,
pode-se notar que os comprimentos e os pesos também são maiores em águas rasas,
uma vez que o carregamento ambiental se torna mais significativo.
Além disso, assim como em águas intermediarias a rota com 1dutok = , no trecho
mais raso, tende a se alinhar as cargas preponderantes de NE-SW e N-S, contudo nos
primeiros 50 metros de profundidade o duto precisa de uma quantidade de lastro maior
(item A.3 e A.4 do Apêndice) devido às cargas elevadas. A rota com 10dutok = , se
aproxima bastante da com 1dutok = , divergindo nos trechos de maiores profundidades.
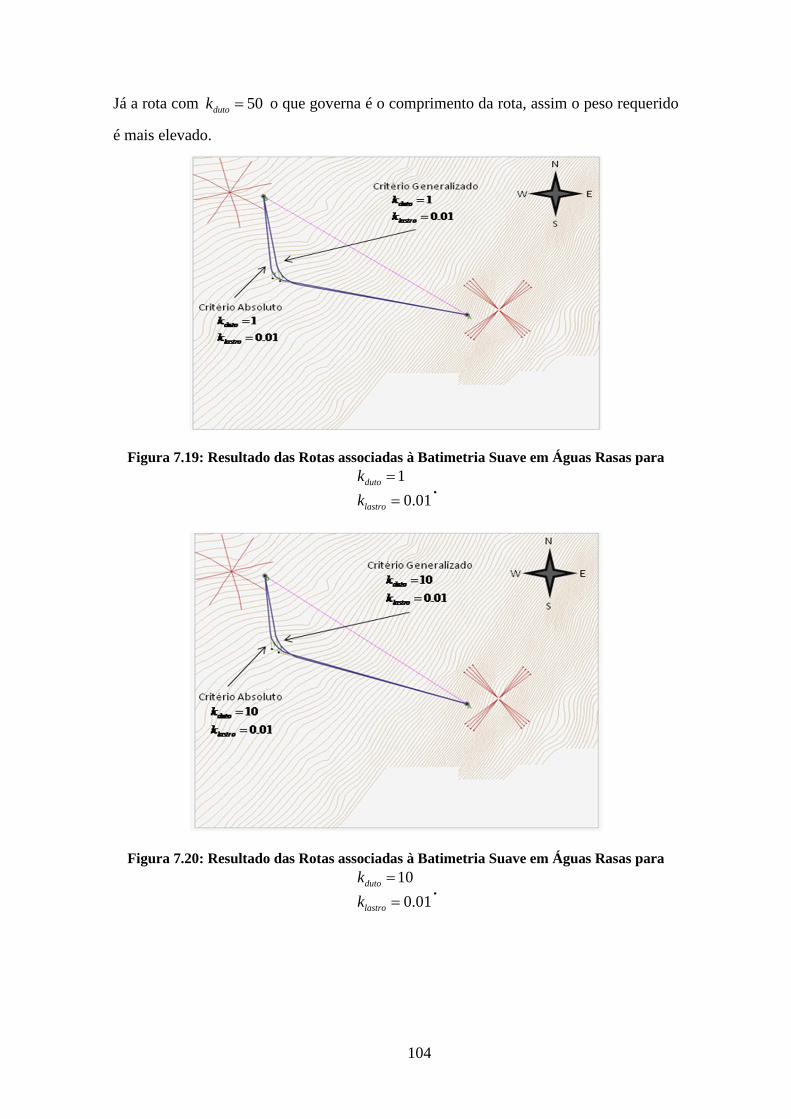
104
Já a rota com 50dutok = o que governa é o comprimento da rota, assim o peso requerido
é mais elevado.
Figura 7.19: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para 10.01
duto
lastro
kk
==
.
Figura 7.20: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para 100.01
duto
lastro
kk
==
.

105
Figura 7.21: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para 500.01
duto
lastro
kk
==
.
7.3.2.3 Batimetria Suave – Águas Rasas: Estudo dos Carregamentos Ambientais
As rotas obtidas para o cenário com batimetria suave em águas rasas
desconsiderando a corrente estão ilustradas nas Figura 7.22 e Figura 7.23, sendo os
resultados indicados na Tabela 7.21.
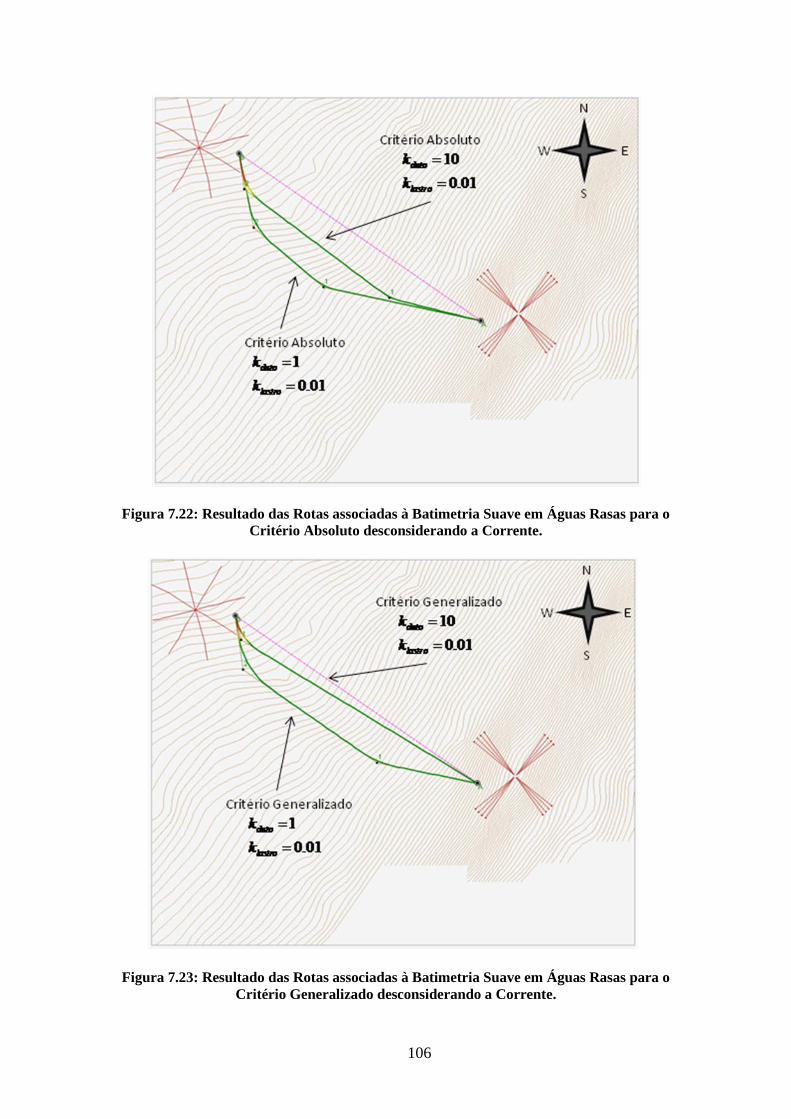
106
Figura 7.22: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o Critério Absoluto desconsiderando a Corrente.
Figura 7.23: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o Critério Generalizado desconsiderando a Corrente.

107
Tabela 7.21: Resumo dos Resultados da Batimetria Suave para Águas Rasas desconsiderando a Corrente.
Rota Ponderação Comprimento
Rota
Melhor
Fitness
Peso Total Peso
Médio
Critério
Absoluto
10.01
duto
lastro
kk
==
13839 m 43.38 1481 KN 107 N/m
100.01
duto
lastro
kk
==
13120 m 85.63 1443 KN 110 N/m
Critério
Generalizado
10.01
duto
lastro
kk
==
13382 m 67.65 509 KN 38 N/m
100.01
duto
lastro
kk
==
12684 m 91.33 685 KN 54 N/m
O estudo da batimetria suave em águas rasas desconsiderando a corrente permite
verificar a influência da onda isoladamente. Assim, comparando o método absoluto e
generalizado (Figura 7.24 e Figura 7.25), observa-se que o peso requerido para o
generalizado é menor, devido à maior tolerância ao deslocamento.
Além disso, pode-se observar, comparando com o estudo da batimetria suave em
águas rasas para o carregamento total, que o resultado sem corrente fornece pesos e
comprimentos menores, uma vez que a carga total reduz. Além disso, em águas mais
profundas a onda é desprezível, logo não há solicitação sobre o duto tornando-o estável
sem lastro (item A.5 e A.6).

108
Figura 7.24: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas
desconsiderando a Corrente para 10.01
duto
lastro
kk
==
.
Figura 7.25: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas
desconsiderando a Corrente para 100.01
duto
lastro
kk
==
.
As rotas obtidas para o cenário com batimetria suave em águas rasas
desconsiderando a onda estão ilustradas na Figura 7.26, sendo os resultados indicados
na Tabela 7.22.

109
Figura 7.26: Resultado das Rotas associadas à Batimetria Suave em Águas Rasas para o Critério Absoluto desconsiderando a Onda.
Tabela 7.22: Resumo dos Resultados da Batimetria Suave para Águas Rasas desconsiderando a Onda.
Rota Ponderação Comprimento
Rota
Melhor
Fitness
Peso
Total
Peso
Médio
Critério
Absoluto
10.01
duto
lastro
kk
==
14541 m 48.04 1149 KN 79 N/m
100.01
duto
lastro
kk
==
13289 m 80.29 2246 KN 169 N/m
Por fim, o estudo da batimetria suave em águas rasas desconsiderando a onda
permite verificar a influência da corrente isoladamente. Comparando com o estudo da
batimetria suave em águas rasas para o carregamento total, que o resultado sem onda
fornece pesos e comprimentos menores, uma vez que a carga total é reduzida. Contudo
o comprimento, quando comparado com o avaliado somente com onda, é maior, uma
vez que a corrente influencia toda a extensão da rota, o que não ocorre quando se avalia
só a onda, pois esta não é expressiva em águas profundas.

110
Vale destacar que o estudo pelo método generalizado não é adequado sem
carregamento de onda, por esse motivo só foi avaliado o método absoluto.
Adicionalmente, verificando apenas a influência de cada carregamento
isoladamente, pode-se verificar que apesar da rota avaliada só com onda ter um
comprimento menor ela possui um peso total de lastro maior que a só influenciada por
corrente (Tabela 7.23).
Tabela 7.23: Comparação dos Resultados com os Carregamentos Considerados Isoladamente.
Rota Ponderação Comprimento
Rota
Melhor
Fitness
Peso Total Peso
Médio
Critério
Absoluto
Só Onda
10.01
duto
lastro
kk
==
13839 m 43.38 1481 KN 107 N/m
Critério
Absoluto
Só Corrente
10.01
duto
lastro
kk
==
14541 m 48.04 1149 KN 79 N/m
Além disso, tomando como referencia o elemento mais raso de cada uma das
rotas comparadas na Tabela 7.23, pode-se perceber que a carga só de onda requer um
lastro bem maior que a carga só de corrente (Tabela 7.24), considerando que esse
elemento em cada uma das rotas está praticamente com o mesmo alinhamento em
relação ao norte. Os dados de peso de lastro para cada elemento da rota pelo critério
absoluto só com onda e só com corrente podem ser vistos nos itens A.5 e A.7,
respectivamente.

111
Tabela 7.24: Comparação dos Resultados com os Carregamentos Considerados Isoladamente do Elemento mais Raso.
Rota Profundidade Comprimento Rota Peso Mínimo Requerido
Critério Absoluto
Só Onda 17.68 m 13839 m 2400 N/m
Critério Absoluto
Só Corrente 17.37 m 14541 m 0 N/m
112
CCaappííttuulloo 88 -- CCoonncclluussããoo
8.1 CONSIDERAÇÕES FINAIS
Com base no estudo apresentado pode-se afirmar que o algoritmo é capaz de
analisar problemas reais de projetos de dutos, refinando a análise no que tange a evitar
obstáculos, procurar menores declives e encontrar rotas com maior estabilidade
hidrodinâmica.
No que foi exposto, pode-se verificar que o cálculo da estabilidade influencia
consideravelmente o processo de busca pela melhor rota, mostrando um conceito
diferenciado para o traçado de rota de dutos submarinos no que tange ao cálculo de
estabilidade hidrodinâmica.
Adicionalmente, os resultados obtidos confirmam a necessidade da otimização
do peso do lastro do duto em conjunto com o comprimento da rota, a fim de evitar
configurações excessivamente longas para atingir estabilidade, bem como evitar excesso
de lastro.
Além disso, observou-se que a consideração do lastro como uma espessura de
concreto associada ao duto pode não ser a melhor opção uma vez que o empuxo do duto
aumenta e o peso submerso diminui. Assim o enterramento ou o colchão de concreto
podem satisfazer a estabilidade com menores pesos de lastro.
Desta forma, a ferramenta de otimização desenvolvida apresenta resultados
coerentes, satisfatórios e com reduzido tempo computacional, o que vem corroborar a
viabilidade do acoplamento da estabilidade hidrodinâmica com o projeto geométrico de
rota de dutos.
8.2 PROPOSTA PARA TRABALHOS FUTUROS
Seguindo o escopo do trabalho, um trabalho futuro relevante é a incorporação da
análise dinâmica de estabilidade hidrodinâmica no programa de otimização, a fim de
refinar o resultado em torno de uma rota otimizada, uma vez que o custo computacional
é alto e seria inviável fazer a análise durante todo o processo de otimização.
Outro trabalho importante é o tratamento multi-objetivo do problema de
otimização de rota de dutos, no qual a parcela de comprimento e peso de lastro seriam
tratadas separadamente na função objetivo, gerando uma envoltória com rotas ótimas e
a escolha da melhor estaria a cargo do projetista.

113
Ainda no que tange à otimização das parcelas de comprimento e peso de lastro,
uma consideração importante é o cálculo do peso de lastro considerando uma espessura
de concreto, já que foi observado no item 7.3.1.2 que a resposta para os diferentes tipos
de lastro pode fornecer pesos díspares devido à mudança do diâmetro hidrodinâmico do
duto.
Adicionalmente, outro fator a ser considerado é a dificuldade de prover lastro ao
duto em regiões mais profundas, tornando o processo dispendioso devido ao problema
de se lançar dutos pesados em águas profundas (necessitaria de embarcação especial que
suporte elevadas trações de topo). Logo, uma consideração de ponderação do custo de
lastro ( lastrok ) em função da profundidade seria uma solução viável, assim a medida que
a profundidade aumenta, elevaria o custo de lastro ( lastrok ) para evitar esse problema.
Isso ocorre, pois o algoritmo tende a alinhar o duto com as direções preponderantes na
região mais rasa, onde os pesos de lastro seria maiores caso a carga ambiental incidisse
diretamente, preterindo o trecho no fundo que apesar de ser associado a pouco lastro
pode ainda sim necessitar de peso para garantir a estabilidade hidrodinâmica.
Por fim, outra sugestão de trabalho futuro no tocante das penalizações do
problema de otimização é aplicar um método de penalização adaptativa, como por
exemplo, o APM (Adaptative Penalty Method). As técnicas adaptativas baseiam-se na
alteração dos valores dos fatores de ponderação das penalizações ao longo do processo
de otimização. O conceito principal é fazer com que os valores dos coeficientes de
penalização sejam distribuídos de tal forma que as restrições mais difíceis de serem
atendidas sejam penalizadas mais fortemente, procurando evitar, no caso da estabilidade
do duto especificamente, trechos de rotas que não atinjam estabilidade hidrodinâmica.

114
Referências Bibliográficas
[1] DORIGO, M., Metaheuristics Network. Disponível em:
http://www.metaheuristics.net. Acesso em: 30 Nov. 2010.
[2] DNV RP - F109, On-Bottom Stability Design of Submarine Pipelines, Det Norske
Veritas, 1ª Edition, 2007.
[3] PRCI, Submarine Pipeline On-Bottom Stability, Pipeline Research Council
International, Vol 1 e 2, 2002.
[4] FERNANDES, D. H., JACOB, B. P., LIMA, B. S. L. P., et al. 2008, “Offshore
Pipeline Route Assessment via Evolutionary Algorithms”. In: Proceedings of the
XXIX Congresso Ibero Latino Americano de Métodos Computacionais em
Engenharia, Maceió, Brasil.
[5] MEISINGSET, H., HOVE, J., OLSEN, G., 2004, “Optimization of Pipeline
Routes”. In: Proceedings of the Fourteenth International Offshore and Polar
Engineering Conference, Toulon, França.
[6] VIEIRA, I. N., ALBRECHT, C. H., LIMA, B. S. L. P., et al., 2010, “Towards a
Computational Tool for the Synthesis and Optimization of Submarine Pipeline
Routes”. In: Proceedings of the Twentieth International Offshore and Polar
Engineering Conference, Beijing, China.
[7] HALE, J. R., LAMMERT, W. F., ALLEN, D. W., “Pipeline On-Bottom Stability
Calculations: Comparison of Two State-of-the-Art Methods and Pipe-Soil Model
Verification”. Offshore Technology Conference, Houston, Texas, 6-9 May 1991.
[8] VERITEC RP – E305, On-Bottom Stability Design of Submarine Pipelines, Veritas
Offshore Technology and Services, 1988.
[9] HANIFFAH, M. R. B. M., 2007, On - Bottom Stability Analysis and Design of
Submarine Pipeline. Projeto de Fim de Curso. Faculty of Civil Engineering.
Univeristi Teknologi Malaysia, Malasia.
[10] LIMA JUNIOR, M. H. A., Verificação de Critérios de Estabilidade de Dutos
Apoiados no Leito Marinho. Dissertação de M.Sc., COPPE/UFRJ, Rio de Janeiro,
RJ, Brasil, 2010.
[11] GUO, B., SONG, S., CHACKO, J., et al., 2005, Offshore Pipelines,
United States, Elsevier.
[12] BAI, Y., BAI, Q., 2005, “Subsea Pipelines and Risers”, 1ª Edition, Elsevier.
115
[13] COLGROUT Ltda. Disponível em: http://www.colgrout.com.br. Acesso em: 24
Jan. 2011.
[14] HOLLAND, J. H., Adaptation in Natural and Artificial Systems. Ann Arbor:
University of Michigan Press, 1975.
[15] LIMA, B. S. L. P., Notas de Aula de Algoritmos Genéticos. COC 769, Programa de
Engenharia Civil, COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2008.
[16] GOLDBERG, D.E., 1989, Genetic Algorithms in Search, Optimization and
Machine Learning, Addison-Wesley.
[17] LACERDA, E. G. M., Metaheurísticas: Algoritmos Genéticos. UFRJ/DCA.
Disponível em: http://www.dca.ufrn.br/~estefane/metaheuristicas/index.html.
Acesso em: 26 Jan. 2011.
[18] MICHALEWICZ, Z., 1999, Genetic Algorithms + Data Structures = Evolution
Programs, 3rd Edition, Springer Verlag, Berlin Heidelberg.
[19] JACOB, B. P., ALBRECHT, C. H., LIMA JUNIOR, M. H. A., et al., Ferramentas
Computacionais para Síntese e Otimização de Rota de Dutos. In: Relatório R1 –
11981, Laboratório de Métodos Computacionais e Sistemas Offshore, Rio de
Janeiro, Brasil, 2009.
[20] JACOB, B. P., ALBRECHT, C. H., LIMA JUNIOR, M. H. A., et al., Ferramentas
Computacionais para Síntese e Otimização de Rota de Dutos. In: Relatório R2 –
11981, Laboratório de Métodos Computacionais e Sistemas Offshore, Rio de
Janeiro, Brasil, 2011.
[21] MORISON, J. R., O’BRIEN, M.P., JOHNSON, J.W., et al., “The Force Exerted by
Surfaces Waves on Piles”, Petrol. Trans., AIME, nº 189, 1950.
[22] JONES, W. T., “On-Bottom Pipeline Stability in Steady Water Currents”, Journal
of Petroleum Technology, AIME, Março, 1978.

116
AAppêênnddiiccee AA::
RReessuullttaaddoo DDeettaallhhaaddoo ddaa OOttiimmiizzaaççããoo ddoo PPeessoo ddee
LLaassttrroo
A.1. Resultados da Batimetria Acidentada em Águas Intermediárias
Figura A.1 –Rota associada à Batimetria Acidentada em Águas Intermediárias 10.0001
duto
lastro
kk
==
.
Tabela A.1 –Rota associada à Batimetria Acidentada em Águas Intermediárias.
Batimetria Acidentada em Águas Intermediárias 10.0001
duto
lastro
kk
==
Critério Absoluto Nó Profundidade Peso Requerido Fator Segurança
0 103,10 3300 1,15 1 123,04 3300 1,17 2 147,88 3300 1,15 3 175,43 3300 1,16 4 202,55 3300 1,16 5 226,67 3300 1,16 6 244,93 3300 1,17 7 261,48 3300 1,18 8 278,60 3300 1,18 9 297,01 3300 1,18

117
10 318,89 3300 1,18 11 344,26 3300 1,17 12 373,00 3300 1,19 13 401,27 3300 1,19 14 431,00 3300 1,18 15 463,68 3300 1,17 16 497,57 3300 1,15 17 535,13 3300 1,15 18 579,16 3500 1,19 19 631,67 3700 1,14 20 688,88 3500 1,19 21 731,76 3500 1,17 22 749,71 3400 1,11 23 768,89 3400 1,10 24 791,89 3500 1,18 25 804,29 3400 1,11 26 812,98 3400 1,11 27 824,58 3400 1,12 28 840,60 3400 1,12 29 860,17 3400 1,13 30 880,63 3400 1,13 31 896,44 3400 1,12 32 908,27 3400 1,14 33 919,40 3400 1,13 34 928,44 3400 1,12 35 935,34 3400 1,12 36 940,06 3400 1,12 37 941,37 3400 1,13 38 940,57 3400 1,13 39 943,41 3400 1,13 40 949,45 3400 1,15 41 953,73 3400 1,14 42 958,70 3400 1,12 43 966,21 3400 1,13 44 974,59 3400 1,13 45 981,85 3400 1,12 46 986,92 3400 1,13 47 989,81 3400 1,10 48 990,26 3500 1,17 49 973,90 3500 1,19 50 945,11 3400 1,12 51 929,67 3400 1,13

118
Figura A.2 –Rota associada à Batimetria Acidentada em Águas Intermediárias Otimizada pela Estabilidade como Penalidade.
Tabela A.2 – Rota associada à Batimetria Acidentada em Águas Intermediárias Otimizada pela Estabilidade como Penalidade.
Rota Otimizada pelo Estabilidade como Penalidade
Critério Absoluto Nó Profundidade Peso Requerido Fator Segurança
0 103,55 3500 1,11 1 124,62 3400 1,10 2 152,17 3400 1,16 3 182,54 3400 1,18 4 212,96 3200 1,21 5 239,31 3200 1,21 6 257,39 3200 1,21 7 273,66 3200 1,22 8 290,75 3200 1,23 9 309,65 3200 1,23
10 335,30 3200 1,23 11 365,68 3200 1,21 12 392,11 3200 1,23 13 419,42 3100 1,10 14 453,64 3200 1,21 15 494,83 3200 1,20 16 541,20 3300 1,14 17 581,01 3600 1,17 18 611,16 3700 1,13 19 636,02 3600 1,11
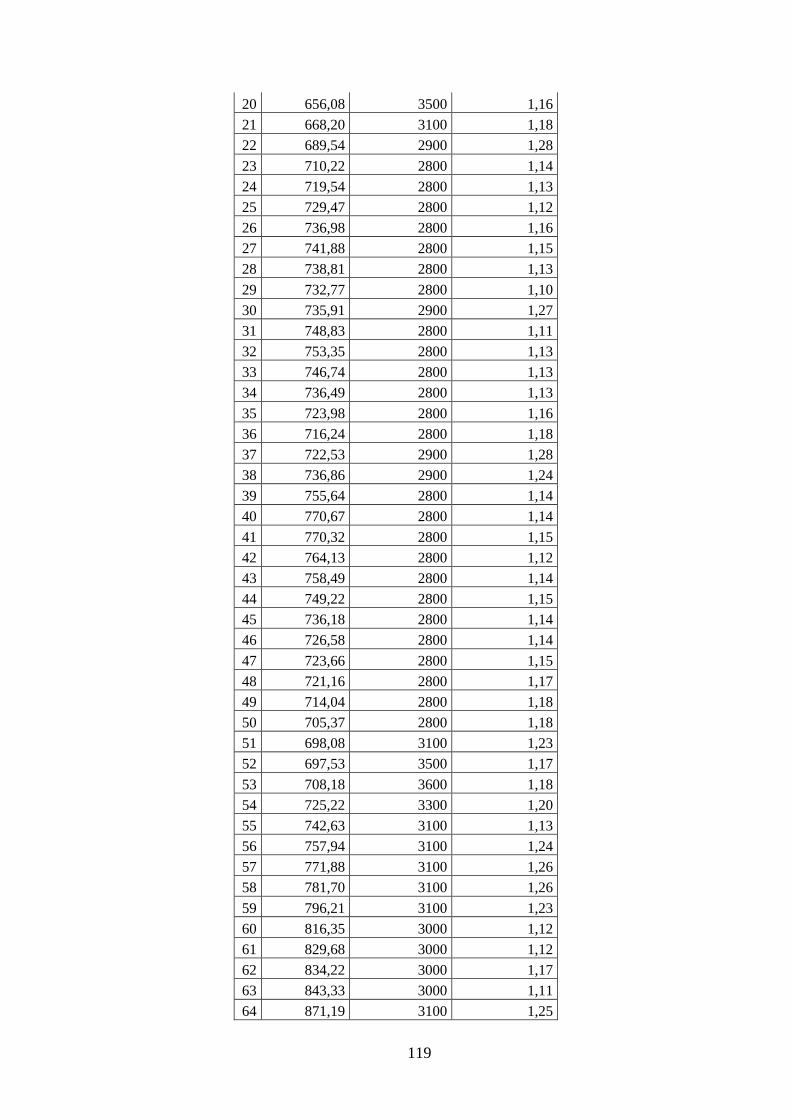
119
20 656,08 3500 1,16 21 668,20 3100 1,18 22 689,54 2900 1,28 23 710,22 2800 1,14 24 719,54 2800 1,13 25 729,47 2800 1,12 26 736,98 2800 1,16 27 741,88 2800 1,15 28 738,81 2800 1,13 29 732,77 2800 1,10 30 735,91 2900 1,27 31 748,83 2800 1,11 32 753,35 2800 1,13 33 746,74 2800 1,13 34 736,49 2800 1,13 35 723,98 2800 1,16 36 716,24 2800 1,18 37 722,53 2900 1,28 38 736,86 2900 1,24 39 755,64 2800 1,14 40 770,67 2800 1,14 41 770,32 2800 1,15 42 764,13 2800 1,12 43 758,49 2800 1,14 44 749,22 2800 1,15 45 736,18 2800 1,14 46 726,58 2800 1,14 47 723,66 2800 1,15 48 721,16 2800 1,17 49 714,04 2800 1,18 50 705,37 2800 1,18 51 698,08 3100 1,23 52 697,53 3500 1,17 53 708,18 3600 1,18 54 725,22 3300 1,20 55 742,63 3100 1,13 56 757,94 3100 1,24 57 771,88 3100 1,26 58 781,70 3100 1,26 59 796,21 3100 1,23 60 816,35 3000 1,12 61 829,68 3000 1,12 62 834,22 3000 1,17 63 843,33 3000 1,11 64 871,19 3100 1,25
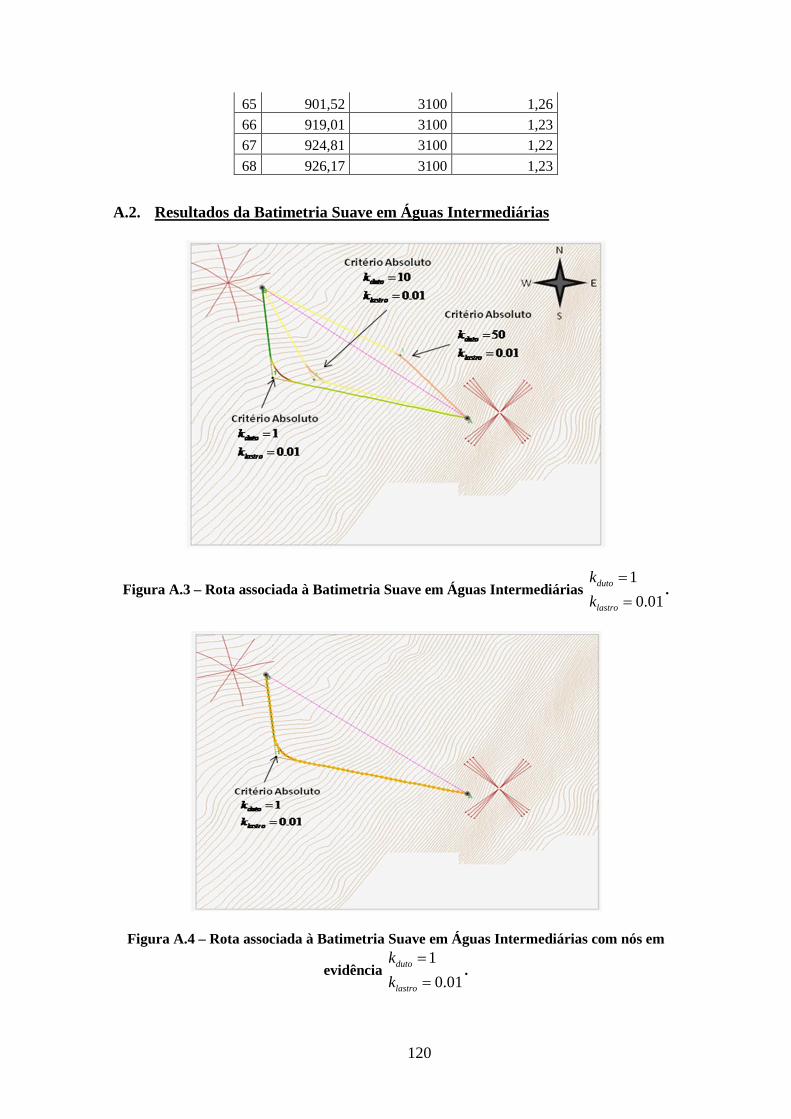
120
65 901,52 3100 1,26 66 919,01 3100 1,23 67 924,81 3100 1,22 68 926,17 3100 1,23
A.2. Resultados da Batimetria Suave em Águas Intermediárias
Figura A.3 – Rota associada à Batimetria Suave em Águas Intermediárias 10.01
duto
lastro
kk
==
.
Figura A.4 – Rota associada à Batimetria Suave em Águas Intermediárias com nós em
evidência 10.01
duto
lastro
kk
==
.

121
Tabela A.3 – Rota associada à Batimetria Suave em Águas Intermediárias 10.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Intermediárias 10.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 628,03 100 1,24 100 1,24 1 606,62 100 1,24 100 1,24 2 585,67 100 1,25 100 1,25 3 566,73 100 1,24 100 1,24 4 550,99 100 1,24 100 1,24 5 537,57 100 1,25 100 1,25 6 524,38 100 1,25 100 1,25 7 510,56 100 1,25 100 1,25 8 496,93 100 1,25 100 1,25 9 484,48 100 1,25 100 1,25
10 474,17 100 1,23 100 1,23 11 465,24 100 1,23 100 1,23 12 456,69 100 1,22 100 1,22 13 448,29 100 1,22 100 1,22 14 439,55 100 1,22 100 1,22 15 430,55 100 1,22 100 1,22 16 421,35 100 1,22 100 1,22 17 412,37 100 1,23 100 1,23 18 403,76 100 1,24 100 1,24 19 395,51 100 1,25 100 1,25 20 387,79 100 1,25 100 1,25 21 380,29 100 1,24 100 1,24 22 372,84 100 1,24 100 1,24 23 365,34 100 1,24 100 1,24 24 357,47 100 1,24 100 1,24 25 349,16 100 1,25 100 1,25 26 340,87 100 1,25 100 1,25 27 332,69 100 1,24 100 1,24 28 325,01 100 1,23 100 1,23 29 318,20 100 1,23 100 1,23 30 312,03 100 1,22 100 1,22 31 306,42 100 1,23 100 1,23 32 301,15 100 1,24 100 1,24 33 296,32 100 1,23 100 1,23 34 291,95 100 1,24 100 1,24 35 287,17 100 1,12 100 1,12 36 281,58 200 1,16 200 1,16 37 275,22 300 1,24 300 1,24
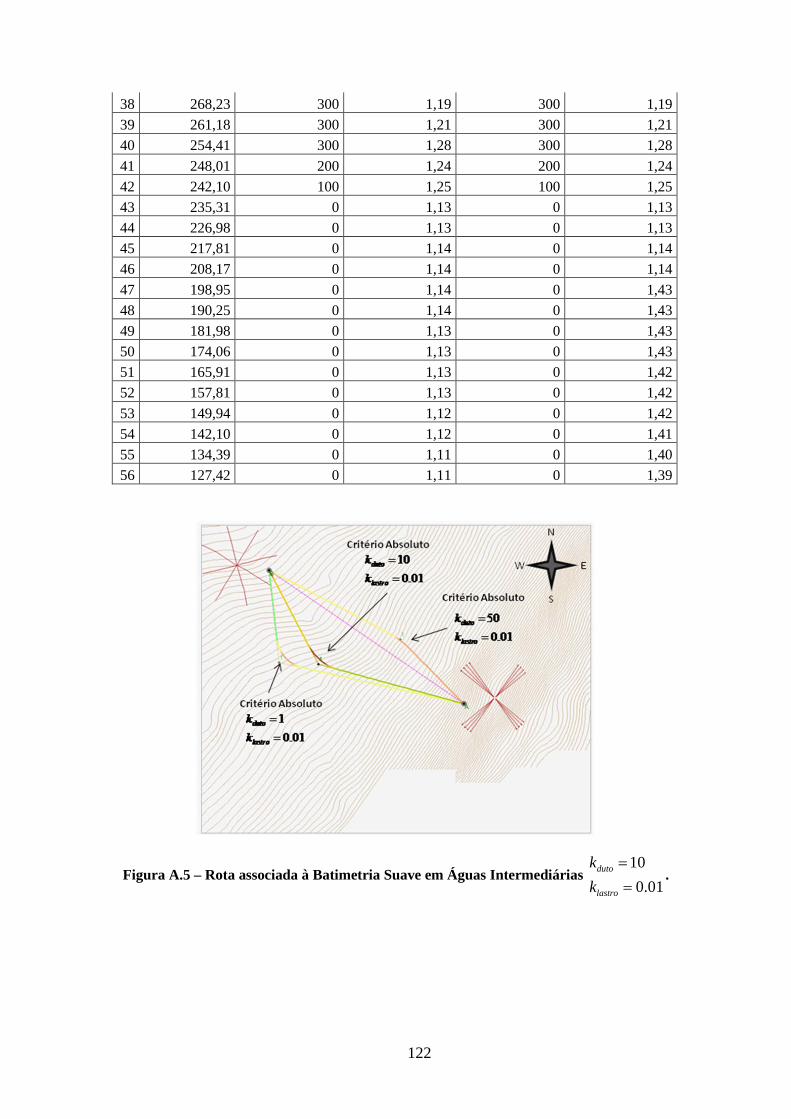
122
38 268,23 300 1,19 300 1,19 39 261,18 300 1,21 300 1,21 40 254,41 300 1,28 300 1,28 41 248,01 200 1,24 200 1,24 42 242,10 100 1,25 100 1,25 43 235,31 0 1,13 0 1,13 44 226,98 0 1,13 0 1,13 45 217,81 0 1,14 0 1,14 46 208,17 0 1,14 0 1,14 47 198,95 0 1,14 0 1,43 48 190,25 0 1,14 0 1,43 49 181,98 0 1,13 0 1,43 50 174,06 0 1,13 0 1,43 51 165,91 0 1,13 0 1,42 52 157,81 0 1,13 0 1,42 53 149,94 0 1,12 0 1,42 54 142,10 0 1,12 0 1,41 55 134,39 0 1,11 0 1,40 56 127,42 0 1,11 0 1,39
Figura A.5 – Rota associada à Batimetria Suave em Águas Intermediárias 100.01
duto
lastro
kk
==
.
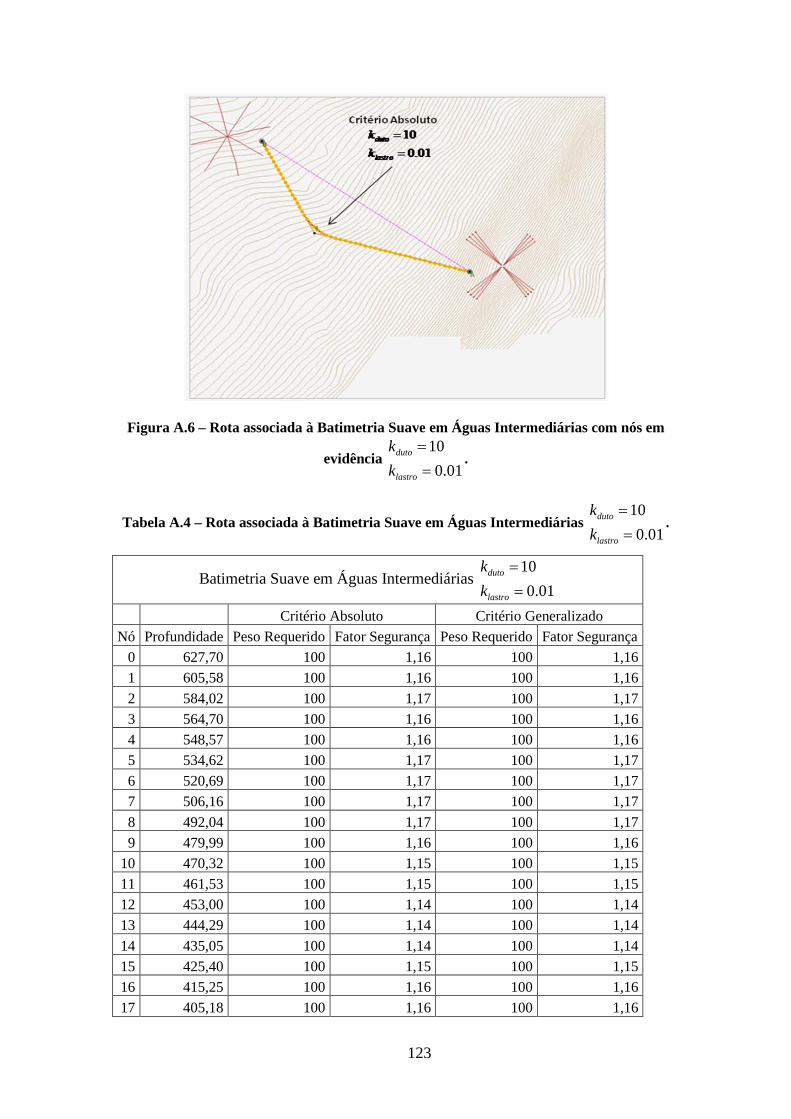
123
Figura A.6 – Rota associada à Batimetria Suave em Águas Intermediárias com nós em
evidência 100.01
duto
lastro
kk
==
.
Tabela A.4 – Rota associada à Batimetria Suave em Águas Intermediárias 100.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Intermediárias 100.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 627,70 100 1,16 100 1,16 1 605,58 100 1,16 100 1,16 2 584,02 100 1,17 100 1,17 3 564,70 100 1,16 100 1,16 4 548,57 100 1,16 100 1,16 5 534,62 100 1,17 100 1,17 6 520,69 100 1,17 100 1,17 7 506,16 100 1,17 100 1,17 8 492,04 100 1,17 100 1,17 9 479,99 100 1,16 100 1,16
10 470,32 100 1,15 100 1,15 11 461,53 100 1,15 100 1,15 12 453,00 100 1,14 100 1,14 13 444,29 100 1,14 100 1,14 14 435,05 100 1,14 100 1,14 15 425,40 100 1,15 100 1,15 16 415,25 100 1,16 100 1,16 17 405,18 100 1,16 100 1,16

124
18 395,61 100 1,17 100 1,17 19 386,90 100 1,17 100 1,17 20 378,83 100 1,18 100 1,18 21 370,82 100 1,18 100 1,18 22 362,63 100 1,18 100 1,18 23 354,04 100 1,18 100 1,18 24 345,12 100 1,19 100 1,19 25 336,42 100 1,18 100 1,18 26 328,41 100 1,18 100 1,18 27 320,85 100 1,10 100 1,10 28 313,22 200 1,20 200 1,20 29 305,14 200 1,12 200 1,12 30 296,78 300 1,25 300 1,25 31 288,34 300 1,21 300 1,21 32 280,05 300 1,21 300 1,21 33 272,06 300 1,23 300 1,23 34 264,46 300 1,28 300 1,28 35 257,05 200 1,13 200 1,13 36 249,24 200 1,13 200 1,13 37 240,77 200 1,14 200 1,14 38 231,79 200 1,14 200 1,14 39 222,54 200 1,15 200 1,15 40 213,60 200 1,14 200 1,14 41 206,02 200 1,12 200 1,12 42 199,46 200 1,12 200 1,12 43 192,55 200 1,12 200 1,12 44 185,49 200 1,12 200 1,12 45 178,70 200 1,11 200 1,12 46 171,41 200 1,12 200 1,12 47 163,28 200 1,12 200 1,12 48 155,35 200 1,11 200 1,12 49 148,31 200 1,11 200 1,12 50 141,49 200 1,11 200 1,12 51 134,37 200 1,10 200 1,12 52 127,50 300 1,28 300 1,28

125
Figura A.7 – Rota associada à Batimetria Suave em Águas Intermediárias 500.01
duto
lastro
kk
==
.
Figura A.8 – Rota associada à Batimetria Suave em Águas Intermediárias com nós em
evidência 500.01
duto
lastro
kk
==
.

126
Tabela A.5 – Rota associada à Batimetria Suave em Águas Intermediárias 500.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Intermediárias 500.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 627,67 300 1,13 300 1,13 1 605,70 300 1,13 300 1,13 2 584,08 300 1,12 300 1,12 3 564,49 300 1,14 300 1,14 4 546,90 300 1,14 300 1,14 5 529,93 300 1,15 300 1,15 6 513,61 300 1,15 300 1,15 7 497,64 300 1,16 300 1,16 8 484,35 300 1,16 300 1,16 9 473,73 300 1,15 300 1,15
10 463,51 300 1,15 300 1,15 11 453,39 300 1,16 300 1,16 12 443,23 300 1,17 300 1,17 13 433,18 300 1,17 300 1,17 14 423,16 300 1,17 300 1,17 15 412,68 300 1,17 300 1,17 16 401,23 300 1,17 300 1,17 17 387,81 300 1,17 300 1,17 18 372,90 300 1,19 300 1,19 19 358,69 300 1,26 300 1,26 20 346,58 200 1,11 200 1,11 21 335,98 200 1,11 200 1,11 22 325,44 200 1,11 200 1,11 23 315,15 200 1,11 200 1,11 24 305,34 200 1,11 200 1,11 25 295,73 200 1,11 200 1,11 26 286,16 200 1,11 200 1,11 27 276,68 200 1,11 200 1,11 28 267,44 200 1,11 200 1,11 29 258,68 200 1,11 200 1,11 30 250,35 200 1,11 200 1,11 31 242,30 200 1,11 200 1,11 32 234,54 200 1,11 200 1,11 33 226,66 200 1,11 200 1,11 34 218,57 200 1,11 200 1,11 35 210,96 200 1,12 200 1,12 36 203,97 200 1,13 200 1,13 37 197,67 200 1,12 200 1,13

127
38 191,96 200 1,12 200 1,13 39 185,75 200 1,13 200 1,13 40 178,79 200 1,13 200 1,13 41 171,48 200 1,12 200 1,13 42 163,93 200 1,12 200 1,13 43 156,79 200 1,12 200 1,12 44 150,28 200 1,12 200 1,12 45 144,07 200 1,12 200 1,12 46 138,35 200 1,11 200 1,13 47 132,72 200 1,11 200 1,13 48 127,01 200 1,11 200 1,18
A.3. Resultados da Batimetria Suave em Águas Rasas pelo Critério Absoluto
Figura A.9 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto 10.01
duto
lastro
kk
==
.

128
Figura A.10 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
com nós em evidência 10.01
duto
lastro
kk
==
.
Tabela A.6 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto 10.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Absoluto 10.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 517,85 100 1,25 100 1,25 1 496,05 100 1,25 100 1,25 2 474,82 100 1,26 100 1,26 3 455,72 100 1,25 100 1,25 4 439,93 100 1,25 100 1,25 5 426,38 100 1,25 100 1,25 6 412,90 100 1,26 100 1,26 7 398,84 100 1,26 100 1,26 8 385,10 100 1,25 100 1,25 9 372,85 100 1,25 100 1,25
10 362,63 100 1,24 100 1,24 11 353,56 100 1,23 100 1,23 12 344,93 100 1,22 100 1,22 13 336,31 100 1,22 100 1,22 14 327,35 100 1,23 100 1,23 15 318,14 100 1,23 100 1,23 16 308,86 100 1,24 100 1,24

129
17 299,88 100 1,24 100 1,24 18 291,29 100 1,25 100 1,25 19 283,15 100 1,25 100 1,25 20 275,37 100 1,25 100 1,25 21 267,82 100 1,25 100 1,25 22 260,17 100 1,24 100 1,24 23 252,39 100 1,24 100 1,24 24 244,39 100 1,24 100 1,24 25 235,98 100 1,25 100 1,25 26 227,35 100 1,25 100 1,25 27 219,16 100 1,24 100 1,24 28 211,86 100 1,23 100 1,23 29 205,21 100 1,23 100 1,23 30 199,29 100 1,23 100 1,24 31 193,87 100 1,24 100 1,24 32 188,79 100 1,24 100 1,24 33 184,23 100 1,24 100 1,24 34 179,85 100 1,24 100 1,25 35 175,33 100 1,24 100 1,24 36 170,77 100 1,23 100 1,24 37 165,24 200 1,24 200 1,24 38 158,28 300 1,20 300 1,21 39 150,90 300 1,23 300 1,24 40 143,91 100 1,13 100 1,14 41 138,02 0 1,15 0 1,16 42 133,16 0 1,15 0 1,16 43 127,15 0 1,14 0 1,48 44 119,50 0 1,14 0 1,47 45 111,27 0 1,15 0 1,43 46 102,14 0 1,14 0 1,33 47 93,29 0 1,13 0 1,27 48 85,16 0 1,11 0 1,20 49 77,24 100 1,13 0 1,10 50 69,50 200 1,14 100 1,22 51 61,62 300 1,16 200 1,27 52 53,48 400 1,18 300 1,23 53 45,65 500 1,11 400 1,14 54 38,44 800 1,16 600 1,15 55 31,19 1100 1,15 900 1,16 56 23,87 1500 1,12 1300 1,12 57 17,25 2200 1,11 1800 1,15
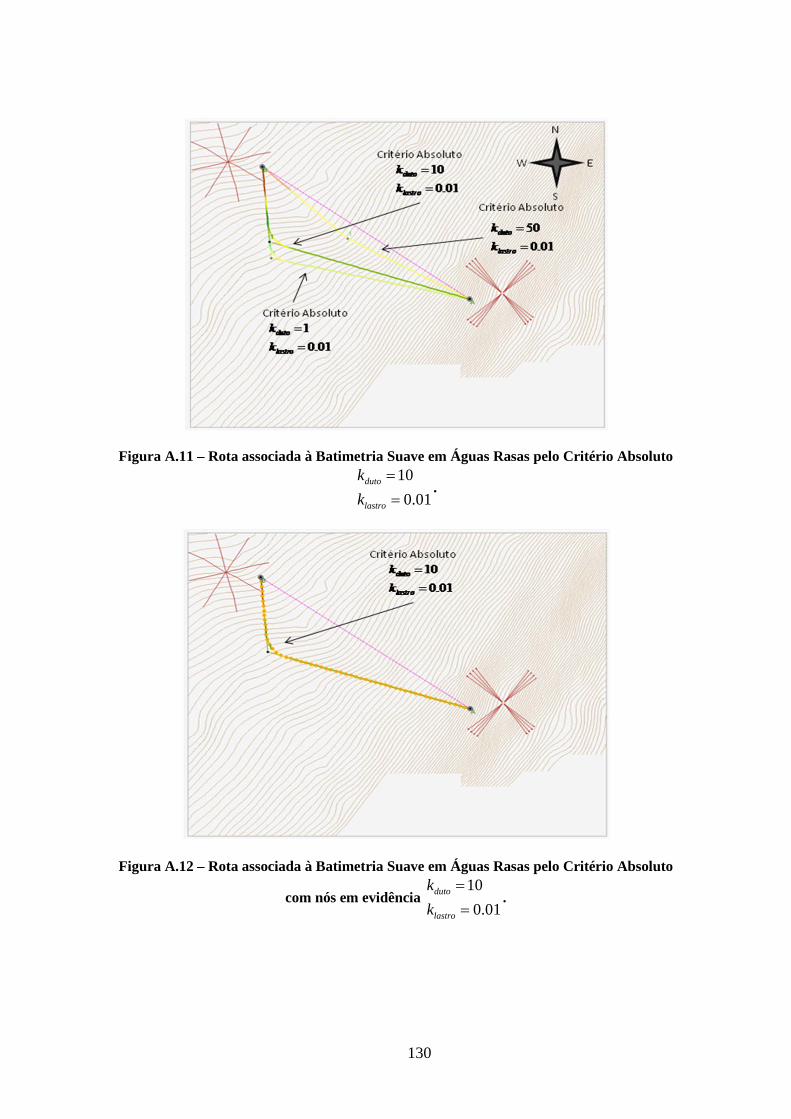
130
Figura A.11 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto 100.01
duto
lastro
kk
==
.
Figura A.12 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
com nós em evidência 100.01
duto
lastro
kk
==
.

131
Tabela A.7 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto 100.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Absoluto 100.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 517,59 100 1,12 100 1,12 1 495,24 100 1,12 100 1,12 2 473,43 100 1,12 100 1,12 3 453,93 100 1,11 100 1,11 4 437,64 100 1,12 100 1,12 5 423,42 100 1,12 100 1,12 6 409,12 100 1,12 100 1,12 7 394,25 100 1,13 100 1,13 8 379,88 100 1,13 100 1,13 9 368,01 100 1,12 100 1,12
10 358,71 100 1,11 100 1,11 11 350,07 100 1,11 100 1,11 12 341,63 100 1,10 100 1,10 13 332,83 100 1,10 100 1,10 14 323,38 100 1,10 100 1,10 15 313,24 100 1,11 100 1,11 16 302,34 100 1,12 100 1,12 17 291,54 100 1,12 100 1,12 18 281,45 100 1,13 100 1,13 19 272,22 100 1,13 100 1,13 20 263,65 100 1,14 100 1,14 21 255,09 100 1,14 100 1,14 22 246,33 100 1,14 100 1,14 23 237,29 100 1,14 100 1,14 24 228,19 100 1,14 100 1,14 25 219,50 100 1,14 100 1,14 26 211,43 100 1,14 100 1,14 27 203,76 100 1,14 100 1,14 28 196,58 100 1,14 100 1,14 29 189,86 100 1,13 100 1,14 30 183,53 100 1,13 100 1,13 31 177,51 100 1,13 100 1,13 32 171,84 100 1,13 100 1,13 33 166,98 100 1,12 100 1,13 34 162,70 100 1,12 100 1,12 35 158,39 100 1,12 100 1,13 36 154,23 100 1,11 100 1,12

132
37 149,59 200 1,21 200 1,22 38 143,89 300 1,24 300 1,25 39 137,66 300 1,18 300 1,19 40 131,23 300 1,23 300 1,24 41 123,93 200 1,19 300 1,21 42 115,14 100 1,24 100 1,35 43 105,78 0 1,15 0 1,37 44 96,63 0 1,14 0 1,29 45 87,60 0 1,12 0 1,22 46 78,99 100 1,17 0 1,13 47 70,90 200 1,16 100 1,24 48 62,94 300 1,17 200 1,30 49 54,81 400 1,20 200 1,10 50 46,86 500 1,14 400 1,18 51 39,28 700 1,10 600 1,18 52 31,68 1100 1,17 900 1,18 53 24,13 1500 1,14 1300 1,12 54 17,33 2200 1,11 1800 1,15
Figura A.13 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto 500.01
duto
lastro
kk
==
.
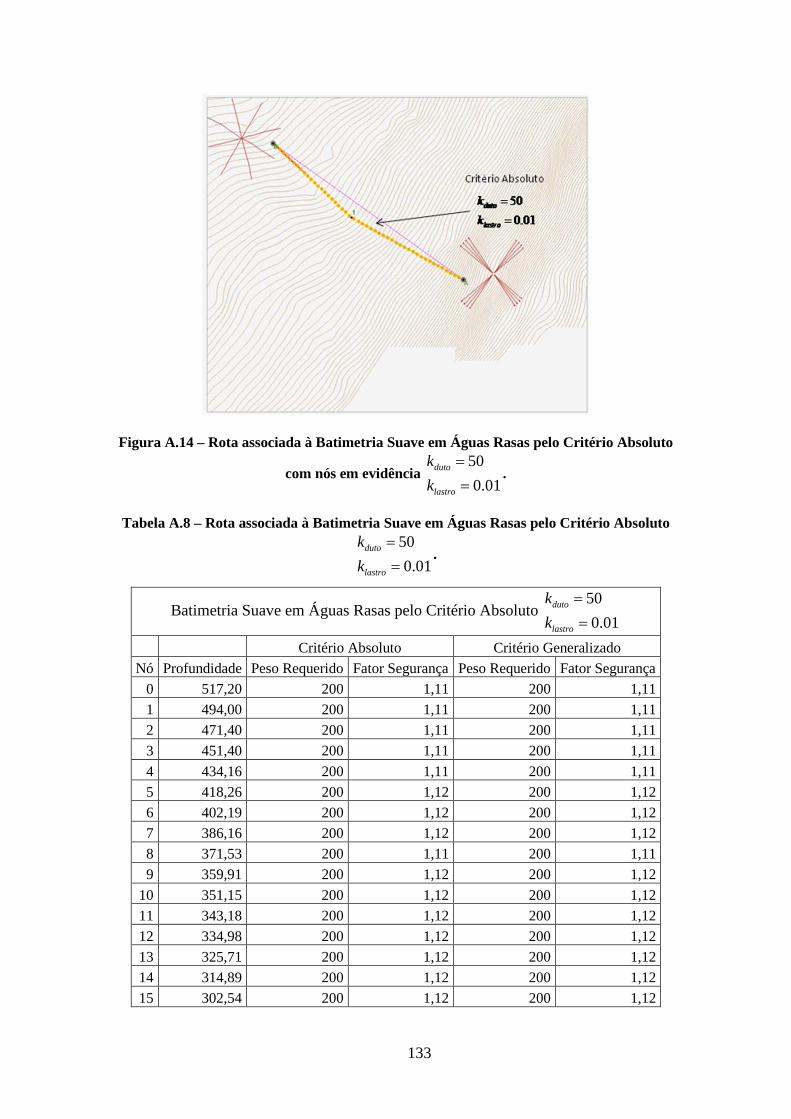
133
Figura A.14 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
com nós em evidência 500.01
duto
lastro
kk
==
.
Tabela A.8 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto 500.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Absoluto 500.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 517,20 200 1,11 200 1,11 1 494,00 200 1,11 200 1,11 2 471,40 200 1,11 200 1,11 3 451,40 200 1,11 200 1,11 4 434,16 200 1,11 200 1,11 5 418,26 200 1,12 200 1,12 6 402,19 200 1,12 200 1,12 7 386,16 200 1,12 200 1,12 8 371,53 200 1,11 200 1,11 9 359,91 200 1,12 200 1,12
10 351,15 200 1,12 200 1,12 11 343,18 200 1,12 200 1,12 12 334,98 200 1,12 200 1,12 13 325,71 200 1,12 200 1,12 14 314,89 200 1,12 200 1,12 15 302,54 200 1,12 200 1,12

134
16 288,40 200 1,11 200 1,11 17 273,67 200 1,12 200 1,12 18 260,63 200 1,12 200 1,12 19 249,07 200 1,12 200 1,12 20 238,50 200 1,12 200 1,12 21 228,44 200 1,12 200 1,12 22 218,17 200 1,12 200 1,12 23 207,59 200 1,12 200 1,12 24 197,01 200 1,12 200 1,12 25 186,31 300 1,27 300 1,28 26 175,15 300 1,22 300 1,23 27 164,34 300 1,18 300 1,19 28 154,80 300 1,17 300 1,18 29 146,53 300 1,17 300 1,18 30 138,88 300 1,17 300 1,18 31 131,38 300 1,17 300 1,18 32 123,69 300 1,17 300 1,18 33 116,11 300 1,16 300 1,18 34 108,95 300 1,14 300 1,17 35 102,35 300 1,14 300 1,17 36 96,68 300 1,13 300 1,17 37 91,81 300 1,13 300 1,18 38 86,42 300 1,12 300 1,18 39 80,14 300 1,10 300 1,18 40 73,48 400 1,24 300 1,19 41 66,00 400 1,15 300 1,19 42 58,02 600 1,17 600 1,10 43 50,32 800 1,16 800 1,10 44 42,78 1100 1,13 1100 1,15 45 36,08 1500 1,12 1500 1,10 46 30,07 1900 1,11 1900 1,12 47 23,64 2500 1,13 2500 1,11 48 17,28 3600 1,11 3100 1,12

135
A.4. Resultados da Batimetria Suave em Águas Rasas pelo Critério Generalizado
Figura A.15 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado 10.01
duto
lastro
kk
==
.
Figura A.16 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado com nós em evidência 10.01
duto
lastro
kk
==
.
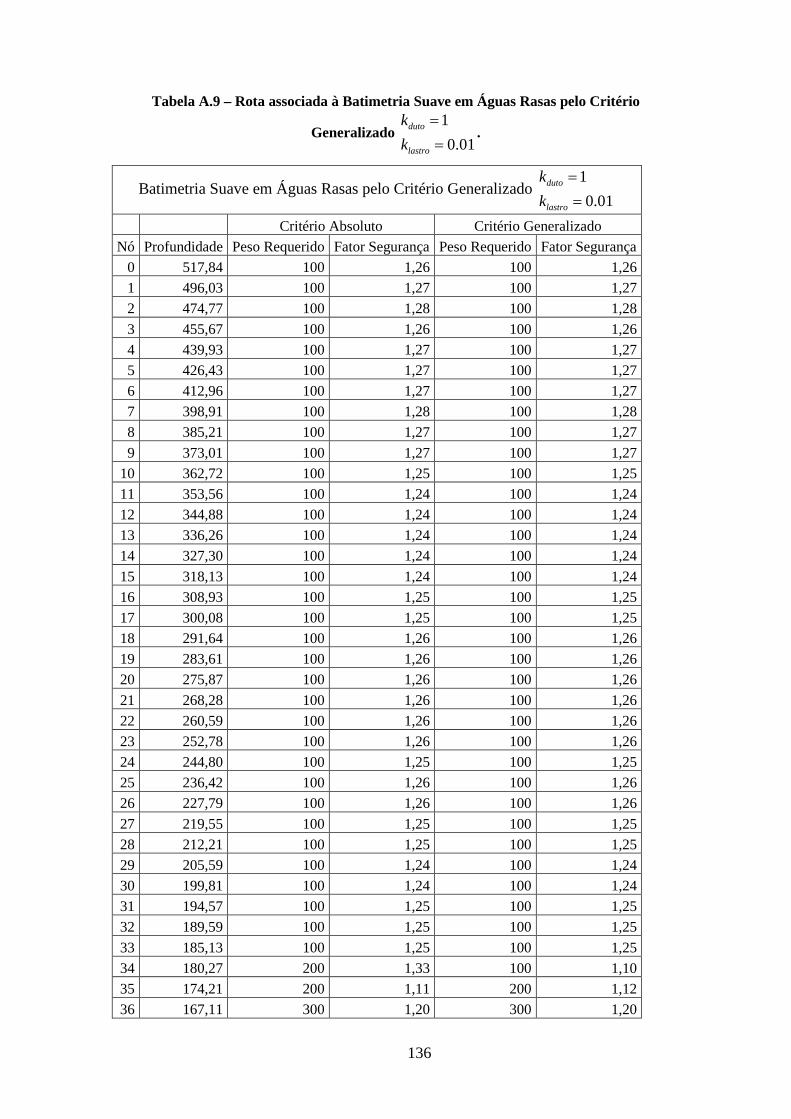
136
Tabela A.9 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado 10.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Generalizado 10.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 517,84 100 1,26 100 1,26 1 496,03 100 1,27 100 1,27 2 474,77 100 1,28 100 1,28 3 455,67 100 1,26 100 1,26 4 439,93 100 1,27 100 1,27 5 426,43 100 1,27 100 1,27 6 412,96 100 1,27 100 1,27 7 398,91 100 1,28 100 1,28 8 385,21 100 1,27 100 1,27 9 373,01 100 1,27 100 1,27
10 362,72 100 1,25 100 1,25 11 353,56 100 1,24 100 1,24 12 344,88 100 1,24 100 1,24 13 336,26 100 1,24 100 1,24 14 327,30 100 1,24 100 1,24 15 318,13 100 1,24 100 1,24 16 308,93 100 1,25 100 1,25 17 300,08 100 1,25 100 1,25 18 291,64 100 1,26 100 1,26 19 283,61 100 1,26 100 1,26 20 275,87 100 1,26 100 1,26 21 268,28 100 1,26 100 1,26 22 260,59 100 1,26 100 1,26 23 252,78 100 1,26 100 1,26 24 244,80 100 1,25 100 1,25 25 236,42 100 1,26 100 1,26 26 227,79 100 1,26 100 1,26 27 219,55 100 1,25 100 1,25 28 212,21 100 1,25 100 1,25 29 205,59 100 1,24 100 1,24 30 199,81 100 1,24 100 1,24 31 194,57 100 1,25 100 1,25 32 189,59 100 1,25 100 1,25 33 185,13 100 1,25 100 1,25 34 180,27 200 1,33 100 1,10 35 174,21 200 1,11 200 1,12 36 167,11 300 1,20 300 1,20

137
37 159,39 300 1,20 300 1,20 38 151,78 200 1,12 200 1,12 39 144,64 100 1,12 100 1,13 40 138,14 100 1,28 100 1,29 41 131,83 100 1,28 100 1,30 42 124,62 100 1,28 0 1,18 43 116,02 100 1,28 0 1,17 44 106,41 100 1,28 0 1,15 45 96,95 100 1,26 0 1,12 46 87,99 100 1,24 100 1,33 47 79,47 100 1,22 100 1,27 48 71,47 100 1,16 100 1,20 49 63,53 200 1,17 100 1,11 50 55,27 300 1,15 200 1,11 51 47,27 500 1,13 400 1,19 52 39,68 800 1,11 500 1,11 53 32,00 1200 1,14 800 1,12 54 24,39 1600 1,11 1200 1,10 55 17,44 2400 1,11 1700 1,11
Figura A.17 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado 100.01
duto
lastro
kk
==
.

138
Figura A.18 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado com nós em evidência 100.01
duto
lastro
kk
==
.
Tabela A.10 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado 100.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Generalizado 100.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 517,72 100 1,13 100 1,13 1 495,63 100 1,13 100 1,13 2 474,06 100 1,14 100 1,14 3 454,71 100 1,13 100 1,13 4 438,50 100 1,13 100 1,13 5 424,44 100 1,13 100 1,13 6 410,41 100 1,14 100 1,14 7 395,75 100 1,14 100 1,14 8 381,50 100 1,14 100 1,14 9 369,47 100 1,13 100 1,13
10 359,98 100 1,12 100 1,12 11 351,35 100 1,12 100 1,12 12 342,96 100 1,11 100 1,11 13 334,35 100 1,11 100 1,11 14 325,13 100 1,12 100 1,12 15 315,33 100 1,12 100 1,12
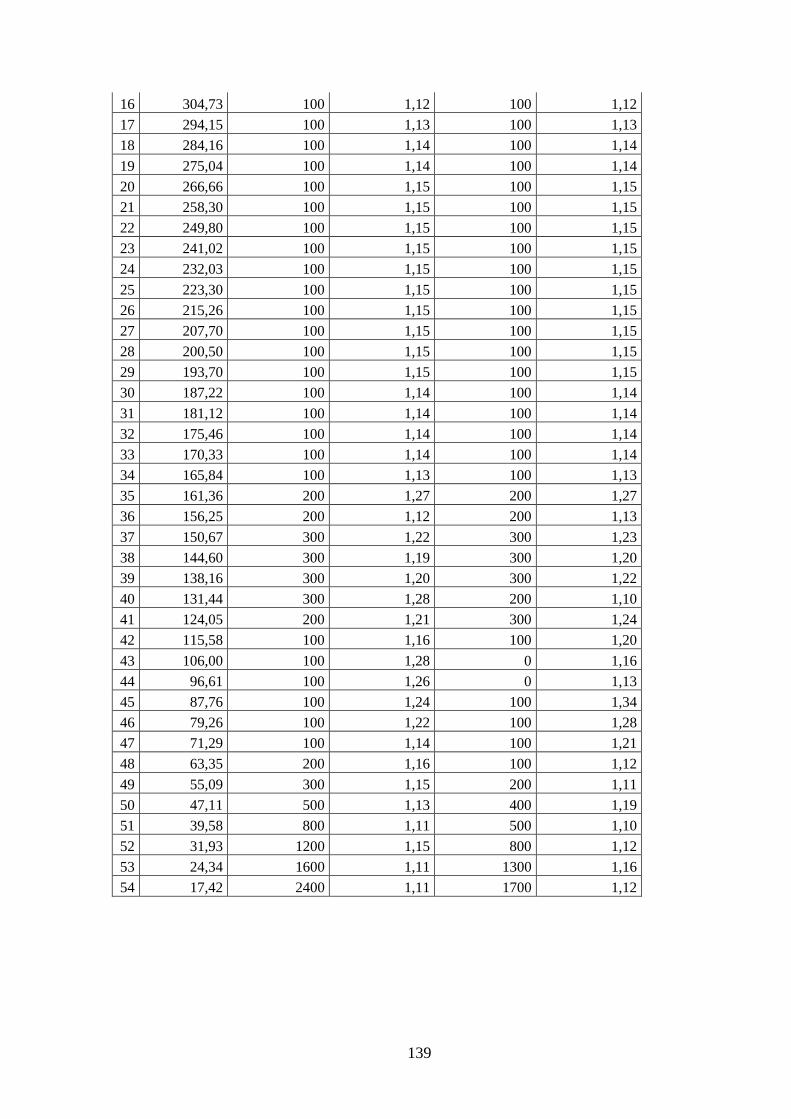
139
16 304,73 100 1,12 100 1,12 17 294,15 100 1,13 100 1,13 18 284,16 100 1,14 100 1,14 19 275,04 100 1,14 100 1,14 20 266,66 100 1,15 100 1,15 21 258,30 100 1,15 100 1,15 22 249,80 100 1,15 100 1,15 23 241,02 100 1,15 100 1,15 24 232,03 100 1,15 100 1,15 25 223,30 100 1,15 100 1,15 26 215,26 100 1,15 100 1,15 27 207,70 100 1,15 100 1,15 28 200,50 100 1,15 100 1,15 29 193,70 100 1,15 100 1,15 30 187,22 100 1,14 100 1,14 31 181,12 100 1,14 100 1,14 32 175,46 100 1,14 100 1,14 33 170,33 100 1,14 100 1,14 34 165,84 100 1,13 100 1,13 35 161,36 200 1,27 200 1,27 36 156,25 200 1,12 200 1,13 37 150,67 300 1,22 300 1,23 38 144,60 300 1,19 300 1,20 39 138,16 300 1,20 300 1,22 40 131,44 300 1,28 200 1,10 41 124,05 200 1,21 300 1,24 42 115,58 100 1,16 100 1,20 43 106,00 100 1,28 0 1,16 44 96,61 100 1,26 0 1,13 45 87,76 100 1,24 100 1,34 46 79,26 100 1,22 100 1,28 47 71,29 100 1,14 100 1,21 48 63,35 200 1,16 100 1,12 49 55,09 300 1,15 200 1,11 50 47,11 500 1,13 400 1,19 51 39,58 800 1,11 500 1,10 52 31,93 1200 1,15 800 1,12 53 24,34 1600 1,11 1300 1,16 54 17,42 2400 1,11 1700 1,12

140
Figura A.19 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado 500.01
duto
lastro
kk
==
.
Figura A.20 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado com nós em evidência 500.01
duto
lastro
kk
==
.

141
Tabela A.11 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado 500.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Generalizado 500.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 517,51 300 1,14 300 1,14 1 495,08 300 1,14 300 1,14 2 473,10 300 1,13 300 1,13 3 453,39 300 1,14 300 1,14 4 435,71 300 1,15 300 1,15 5 418,70 300 1,16 300 1,16 6 402,33 300 1,16 300 1,16 7 386,59 300 1,16 300 1,16 8 373,08 300 1,16 300 1,16 9 361,84 300 1,15 300 1,15
10 351,61 300 1,16 300 1,16 11 341,87 300 1,17 300 1,17 12 331,94 300 1,17 300 1,17 13 321,88 300 1,17 300 1,17 14 311,78 300 1,17 300 1,17 15 301,09 300 1,17 300 1,17 16 289,23 300 1,17 300 1,17 17 276,46 300 1,17 300 1,17 18 263,40 300 1,16 300 1,16 19 251,02 300 1,16 300 1,16 20 238,18 300 1,18 300 1,18 21 224,33 300 1,24 300 1,24 22 212,33 200 1,10 200 1,10 23 202,28 200 1,10 200 1,10 24 192,66 200 1,10 200 1,10 25 183,16 200 1,10 200 1,10 26 173,71 200 1,10 200 1,10 27 164,35 300 1,28 200 1,10 28 155,31 300 1,29 200 1,11 29 146,80 300 1,28 200 1,10 30 138,65 300 1,28 200 1,11 31 130,75 300 1,28 200 1,11 32 123,07 300 1,27 200 1,11 33 115,27 300 1,27 200 1,11 34 107,36 300 1,27 200 1,11 35 99,94 300 1,27 200 1,12 36 93,13 300 1,26 200 1,12

142
37 86,99 300 1,25 200 1,12 38 81,34 300 1,23 200 1,12 39 75,14 300 1,19 200 1,13 40 68,20 400 1,14 200 1,13 41 60,91 600 1,21 200 1,13 42 53,45 700 1,15 700 1,13 43 46,39 900 1,16 900 1,12 44 39,98 1200 1,17 1100 1,10 45 33,86 1600 1,15 1500 1,16 46 28,21 1900 1,11 1900 1,12 47 22,64 2400 1,11 2300 1,11 48 16,98 3500 1,13 2800 1,11
A.5. Resultados da Batimetria Suave em Águas Rasas pelo Critério Absoluto
desconsiderando a Corrente
Figura A.21 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
desconsiderando a Corrente 10.01
duto
lastro
kk
==
.
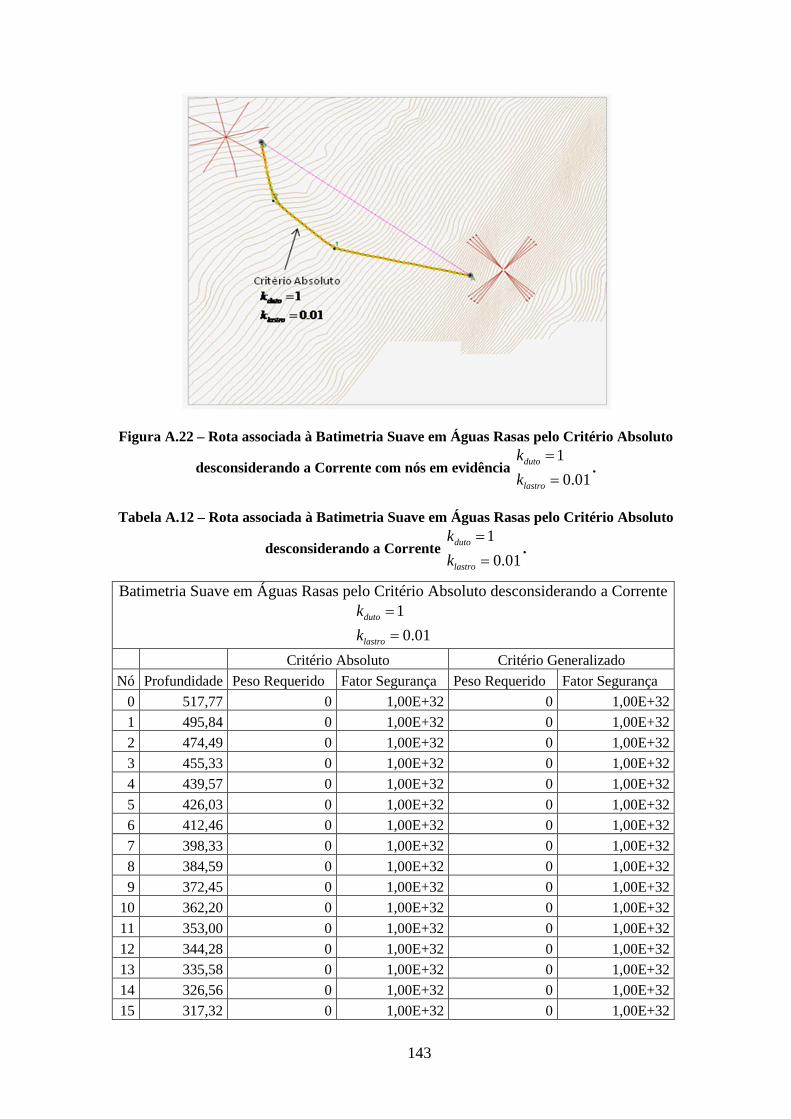
143
Figura A.22 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
desconsiderando a Corrente com nós em evidência 10.01
duto
lastro
kk
==
.
Tabela A.12 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
desconsiderando a Corrente 10.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Absoluto desconsiderando a Corrente 10.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 517,77 0 1,00E+32 0 1,00E+32 1 495,84 0 1,00E+32 0 1,00E+32 2 474,49 0 1,00E+32 0 1,00E+32 3 455,33 0 1,00E+32 0 1,00E+32 4 439,57 0 1,00E+32 0 1,00E+32 5 426,03 0 1,00E+32 0 1,00E+32 6 412,46 0 1,00E+32 0 1,00E+32 7 398,33 0 1,00E+32 0 1,00E+32 8 384,59 0 1,00E+32 0 1,00E+32 9 372,45 0 1,00E+32 0 1,00E+32
10 362,20 0 1,00E+32 0 1,00E+32 11 353,00 0 1,00E+32 0 1,00E+32 12 344,28 0 1,00E+32 0 1,00E+32 13 335,58 0 1,00E+32 0 1,00E+32 14 326,56 0 1,00E+32 0 1,00E+32 15 317,32 0 1,00E+32 0 1,00E+32

144
16 308,11 0 1,00E+32 0 1,00E+32 17 299,27 0 1,00E+32 0 1,00E+32 18 290,81 0 1,00E+32 0 1,00E+32 19 282,81 0 1,00E+32 0 1,00E+32 20 275,06 0 1,00E+32 0 1,00E+32 21 267,43 0 1,00E+32 0 1,00E+32 22 259,69 0 1,00E+32 0 1,00E+32 23 251,76 0 1,00E+32 0 1,00E+32 24 243,42 0 1,00E+32 0 1,00E+32 25 234,44 0 1,00E+32 0 1,00E+32 26 224,67 0 1,00E+32 0 1,00E+32 27 215,04 0 1,00E+32 0 1,00E+32 28 206,38 0 1,00E+32 0 1,00E+32 29 197,74 0 15,71 0 876,50 30 189,04 0 12,76 0 618,02 31 180,73 0 10,85 0 443,23 32 172,78 0 9,04 0 320,86 33 165,57 0 8,11 0 237,92 34 159,03 0 7,21 0 181,91 35 152,85 0 6,60 0 140,38 36 146,90 0 5,96 0 108,85 37 140,98 0 5,52 0 84,75 38 134,73 0 5,29 0 70,65 39 127,47 0 5,14 0 62,48 40 119,19 0 5,20 0 55,21 41 109,96 0 4,82 0 48,86 42 100,36 0 3,97 0 45,60 43 91,29 0 3,43 0 12,12 44 82,57 0 2,06 0 5,73 45 74,48 0 1,44 0 3,91 46 66,73 0 1,16 0 3,14 47 58,40 100 1,16 0 2,48 48 49,77 200 1,11 0 1,84 49 41,26 500 1,20 0 1,29 50 33,01 800 1,13 200 1,21 51 25,02 1400 1,12 500 1,14 52 17,68 2400 1,11 1200 1,10

145
Figura A.23 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
desconsiderando a Corrente 100.01
duto
lastro
kk
==
.
Figura A.24 - Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
desconsiderando a Corrente com nós em evidência 100.01
duto
lastro
kk
==
.

146
Tabela A.13 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
desconsiderando a Corrente 100.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Absoluto desconsiderando a Corrente 100.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 517,93 0 1,00E+32 0 1,00E+32 1 496,28 0 1,00E+32 0 1,00E+32 2 475,12 0 1,00E+32 0 1,00E+32 3 456,05 0 1,00E+32 0 1,00E+32 4 440,16 0 1,00E+32 0 1,00E+32 5 426,51 0 1,00E+32 0 1,00E+32 6 413,04 0 1,00E+32 0 1,00E+32 7 398,95 0 1,00E+32 0 1,00E+32 8 385,15 0 1,00E+32 0 1,00E+32 9 372,82 0 1,00E+32 0 1,00E+32
10 362,74 0 1,00E+32 0 1,00E+32 11 353,92 0 1,00E+32 0 1,00E+32 12 345,42 0 1,00E+32 0 1,00E+32 13 336,94 0 1,00E+32 0 1,00E+32 14 326,61 0 1,00E+32 0 1,00E+32 15 313,98 0 1,00E+32 0 1,00E+32 16 300,12 0 1,00E+32 0 1,00E+32 17 286,94 0 1,00E+32 0 1,00E+32 18 275,20 0 1,00E+32 0 1,00E+32 19 263,89 0 1,00E+32 0 1,00E+32 20 252,84 0 1,00E+32 0 1,00E+32 21 241,75 0 1,00E+32 0 1,00E+32 22 230,41 0 1,00E+32 0 1,00E+32 23 218,80 0 1,00E+32 0 1,00E+32 24 207,26 0 1,00E+32 0 1,00E+32 25 196,32 0 14,27 0 748,57 26 185,70 0 10,96 0 489,46 27 175,21 0 9,22 0 320,02 28 165,62 0 7,85 0 216,02 29 156,90 0 6,68 0 150,66 30 149,35 0 6,01 0 109,41 31 142,65 0 5,33 0 82,23 32 135,72 0 4,96 0 61,01 33 128,50 0 4,26 0 44,49 34 120,80 0 3,50 0 31,60 35 112,50 0 2,78 0 21,71
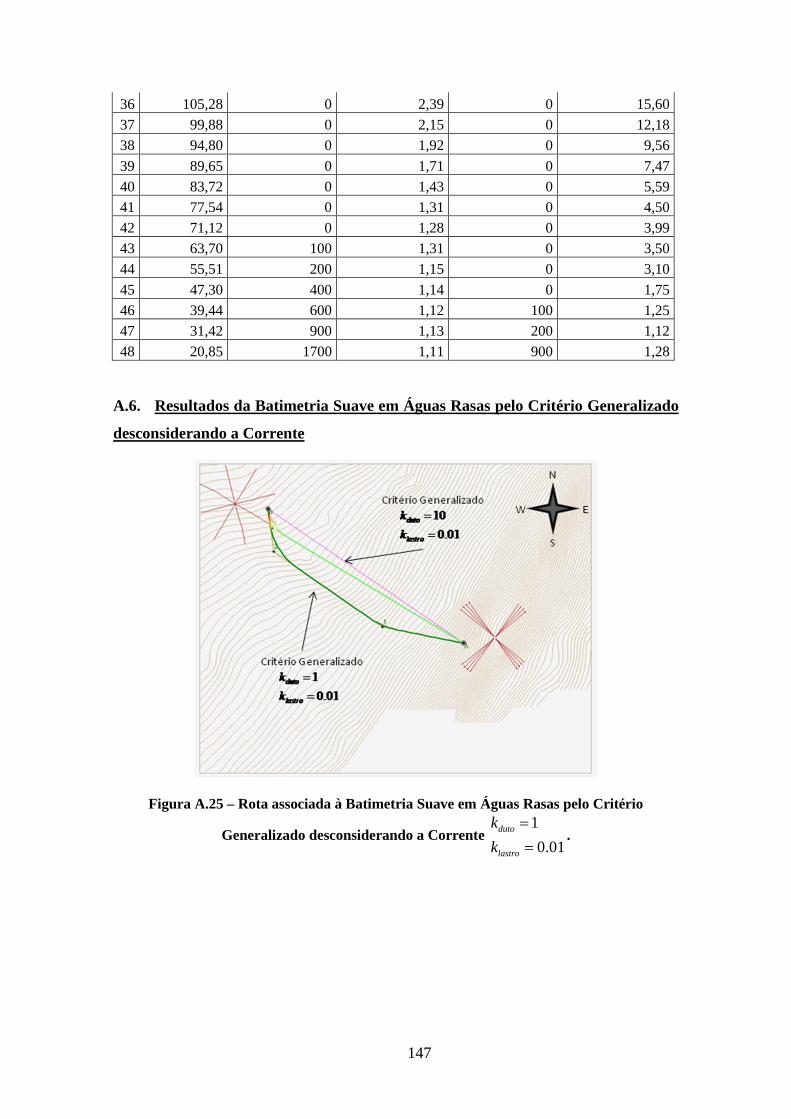
147
36 105,28 0 2,39 0 15,60 37 99,88 0 2,15 0 12,18 38 94,80 0 1,92 0 9,56 39 89,65 0 1,71 0 7,47 40 83,72 0 1,43 0 5,59 41 77,54 0 1,31 0 4,50 42 71,12 0 1,28 0 3,99 43 63,70 100 1,31 0 3,50 44 55,51 200 1,15 0 3,10 45 47,30 400 1,14 0 1,75 46 39,44 600 1,12 100 1,25 47 31,42 900 1,13 200 1,12 48 20,85 1700 1,11 900 1,28
A.6. Resultados da Batimetria Suave em Águas Rasas pelo Critério Generalizado
desconsiderando a Corrente
Figura A.25 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado desconsiderando a Corrente 10.01
duto
lastro
kk
==
.

148
Figura A.26 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado desconsiderando a Corrente com nós em evidência 10.01
duto
lastro
kk
==
.
Tabela A.14 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado desconsiderando a Corrente 10.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Generalizado desconsiderando a
Corrente 10.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 518,10 0 1,00E+32 0 1,00E+32 1 496,86 0 1,00E+32 0 1,00E+32 2 476,06 0 1,00E+32 0 1,00E+32 3 457,22 0 1,00E+32 0 1,00E+32 4 441,65 0 1,00E+32 0 1,00E+32 5 428,41 0 1,00E+32 0 1,00E+32 6 415,43 0 1,00E+32 0 1,00E+32 7 401,82 0 1,00E+32 0 1,00E+32 8 388,35 0 1,00E+32 0 1,00E+32 9 375,98 0 1,00E+32 0 1,00E+32
10 365,45 0 1,00E+32 0 1,00E+32 11 356,31 0 1,00E+32 0 1,00E+32 12 347,71 0 1,00E+32 0 1,00E+32 13 339,32 0 1,00E+32 0 1,00E+32 14 330,13 0 1,00E+32 0 1,00E+32 15 319,97 0 1,00E+32 0 1,00E+32

149
16 309,39 0 1,00E+32 0 1,00E+32 17 298,62 0 1,00E+32 0 1,00E+32 18 287,63 0 1,00E+32 0 1,00E+32 19 276,84 0 1,00E+32 0 1,00E+32 20 266,53 0 1,00E+32 0 1,00E+32 21 256,23 0 1,00E+32 0 1,00E+32 22 245,51 0 1,00E+32 0 1,00E+32 23 234,44 0 1,00E+32 0 1,00E+32 24 223,25 0 1,00E+32 0 1,00E+32 25 212,22 0 1,00E+32 0 1,00E+32 26 201,68 0 1,00E+32 0 1,00E+32 27 191,79 0 10,89 0 595,04 28 182,40 0 8,99 0 408,05 29 173,34 0 7,68 0 282,35 30 164,90 0 6,90 0 199,65 31 157,85 0 6,39 0 148,97 32 151,54 0 5,64 0 114,26 33 145,49 0 5,33 0 88,20 34 139,56 0 4,89 0 68,58 35 132,84 0 4,26 0 51,24 36 126,53 0 3,83 0 38,83 37 120,42 0 3,21 0 29,58 38 113,42 0 2,86 0 22,71 39 106,39 0 2,75 0 18,69 40 99,16 0 2,57 0 15,45 41 91,74 0 2,44 0 12,81 42 84,33 0 2,36 0 10,87 43 77,46 0 1,87 0 9,68 44 70,41 0 1,46 0 8,79 45 62,47 0 1,13 0 5,72 46 54,00 200 1,23 0 3,23 47 45,79 400 1,23 0 1,84 48 38,25 600 1,19 100 1,32 49 29,15 1000 1,11 400 1,18 50 19,06 2000 1,12 900 1,10

150
Figura A.27 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado desconsiderando a Corrente 100.01
duto
lastro
kk
==
.
Figura A.28 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado desconsiderando a Corrente com nós em evidência 100.01
duto
lastro
kk
==
.

151
Tabela A.15 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério
Generalizado desconsiderando a Corrente 100.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas pelo Critério Generalizado desconsiderando a
Corrente 100.01
duto
lastro
kk
==
Critério Absoluto Critério Generalizado Nó Profundidade Peso Requerido Fator Segurança Peso Requerido Fator Segurança
0 517,38 0 1,00E+32 0 1,00E+32 1 494,57 0 1,00E+32 0 1,00E+32 2 472,24 0 1,00E+32 0 1,00E+32 3 452,46 0 1,00E+32 0 1,00E+32 4 435,23 0 1,00E+32 0 1,00E+32 5 419,17 0 1,00E+32 0 1,00E+32 6 403,20 0 1,00E+32 0 1,00E+32 7 387,35 0 1,00E+32 0 1,00E+32 8 372,74 0 1,00E+32 0 1,00E+32 9 360,70 0 1,00E+32 0 1,00E+32
10 351,52 0 1,00E+32 0 1,00E+32 11 343,53 0 1,00E+32 0 1,00E+32 12 335,31 0 1,00E+32 0 1,00E+32 13 326,42 0 1,00E+32 0 1,00E+32 14 316,24 0 1,00E+32 0 1,00E+32 15 304,44 0 1,00E+32 0 1,00E+32 16 291,16 0 1,00E+32 0 1,00E+32 17 276,83 0 1,00E+32 0 1,00E+32 18 263,26 0 1,00E+32 0 1,00E+32 19 251,61 0 1,00E+32 0 1,00E+32 20 240,92 0 1,00E+32 0 1,00E+32 21 230,38 0 1,00E+32 0 1,00E+32 22 219,89 0 1,00E+32 0 1,00E+32 23 209,29 0 1,00E+32 0 1,00E+32 24 198,72 0 15,60 0 722,27 25 188,40 0 12,33 0 478,60 26 178,58 0 10,20 0 322,06 27 169,05 0 8,66 0 217,79 28 159,85 0 7,27 0 149,17 29 151,14 0 6,35 0 103,51 30 142,92 0 5,59 0 72,99 31 135,18 0 4,84 0 52,27 32 127,78 0 4,01 0 37,73 33 120,42 0 3,34 0 27,26 34 113,01 0 2,81 0 19,50 35 106,06 0 2,38 0 14,19
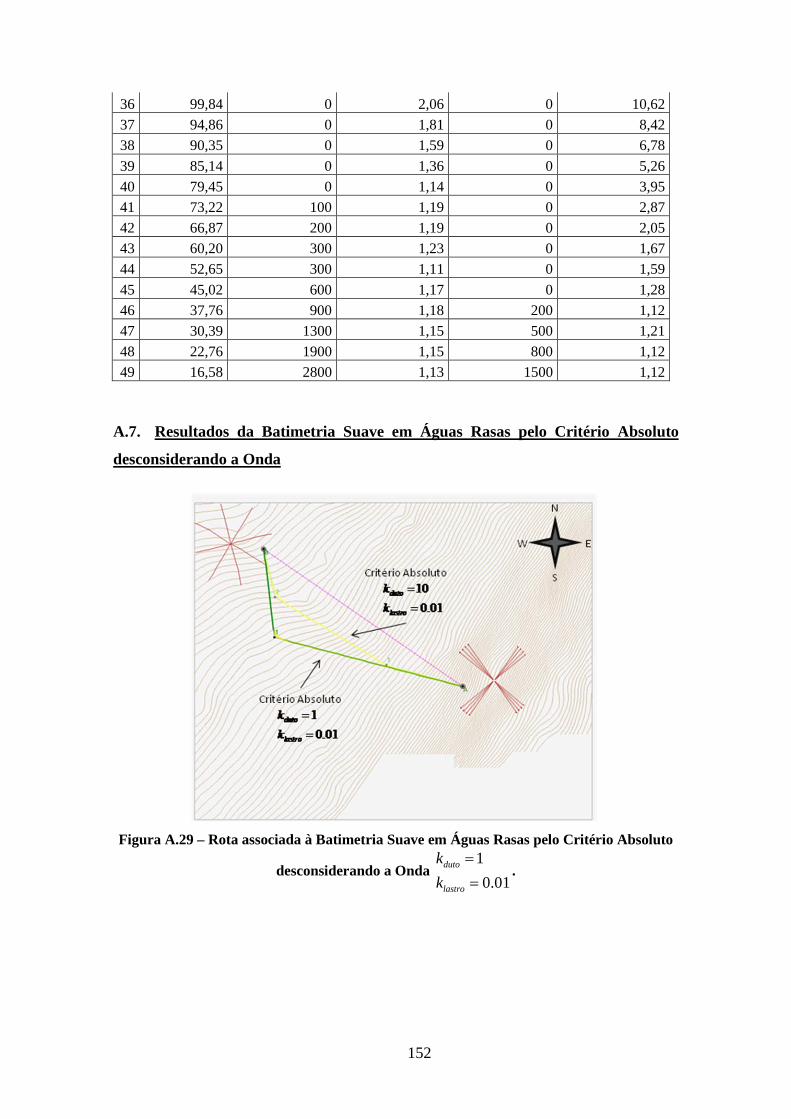
152
36 99,84 0 2,06 0 10,62 37 94,86 0 1,81 0 8,42 38 90,35 0 1,59 0 6,78 39 85,14 0 1,36 0 5,26 40 79,45 0 1,14 0 3,95 41 73,22 100 1,19 0 2,87 42 66,87 200 1,19 0 2,05 43 60,20 300 1,23 0 1,67 44 52,65 300 1,11 0 1,59 45 45,02 600 1,17 0 1,28 46 37,76 900 1,18 200 1,12 47 30,39 1300 1,15 500 1,21 48 22,76 1900 1,15 800 1,12 49 16,58 2800 1,13 1500 1,12
A.7. Resultados da Batimetria Suave em Águas Rasas pelo Critério Absoluto
desconsiderando a Onda
Figura A.29 – Rota associada à Batimetria Suave em Águas Rasas pelo Critério Absoluto
desconsiderando a Onda 10.01
duto
lastro
kk
==
.

153
Figura A.30 – Rota associada à Batimetria Suave em Águas Rasas Critério Absoluto
desconsiderando a Onda com nós em evidência 10.01
duto
lastro
kk
==
.
Tabela A.16 – Rota associada à Batimetria Suave em Águas Rasas Critério Absoluto
desconsiderando a Onda 10.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas Critério Absoluto desconsiderando a Onda
10.01
duto
lastro
kk
==
Critério Absoluto
Nó Profundidade Peso Requerido Fator Segurança
0 517,82 100 1,19
1 495,94 100 1,19
2 474,58 100 1,20
3 455,39 100 1,18
4 439,38 100 1,18
5 425,60 100 1,19
6 411,92 100 1,19
7 397,61 100 1,19
8 383,66 100 1,20
9 371,47 100 1,19

154
10 361,58 100 1,17
11 352,74 100 1,17
12 344,22 100 1,17
13 335,64 100 1,16
14 326,59 100 1,17
15 317,17 100 1,17
16 307,35 100 1,17
17 297,63 100 1,18
18 288,35 100 1,19
19 279,71 100 1,19
20 271,78 100 1,19
21 264,12 100 1,19
22 256,20 100 1,20
23 247,94 100 1,20
24 239,39 100 1,20
25 230,64 100 1,20
26 222,33 100 1,20
27 214,82 100 1,19
28 207,87 100 1,19
29 201,32 100 1,19
30 194,94 100 1,19
31 188,78 100 1,19
32 183,05 100 1,19
33 177,98 100 1,18
34 173,56 100 1,19
35 169,16 100 1,19
36 164,70 100 1,18
37 160,19 100 1,18
38 154,88 200 1,16
39 148,59 300 1,19
40 142,21 200 1,27
41 136,35 0 1,10
42 130,49 0 1,11
43 123,66 0 1,11
44 115,38 0 1,11
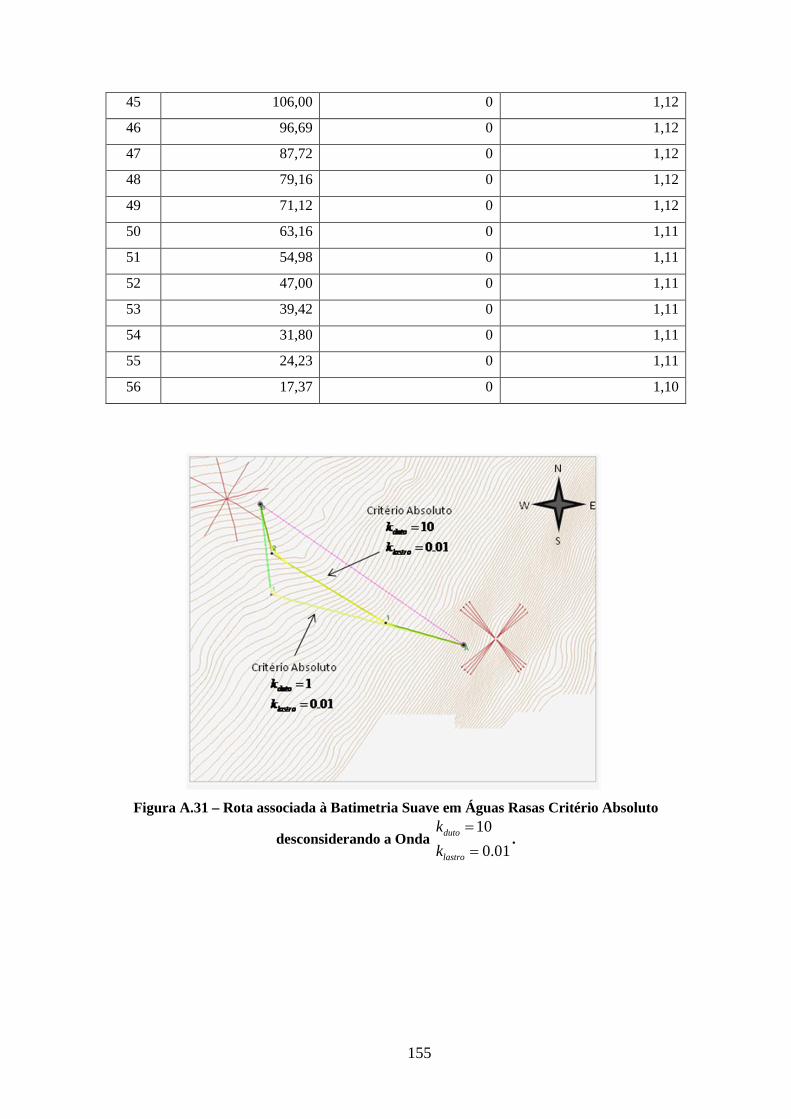
155
45 106,00 0 1,12
46 96,69 0 1,12
47 87,72 0 1,12
48 79,16 0 1,12
49 71,12 0 1,12
50 63,16 0 1,11
51 54,98 0 1,11
52 47,00 0 1,11
53 39,42 0 1,11
54 31,80 0 1,11
55 24,23 0 1,11
56 17,37 0 1,10
Figura A.31 – Rota associada à Batimetria Suave em Águas Rasas Critério Absoluto
desconsiderando a Onda 100.01
duto
lastro
kk
==
.
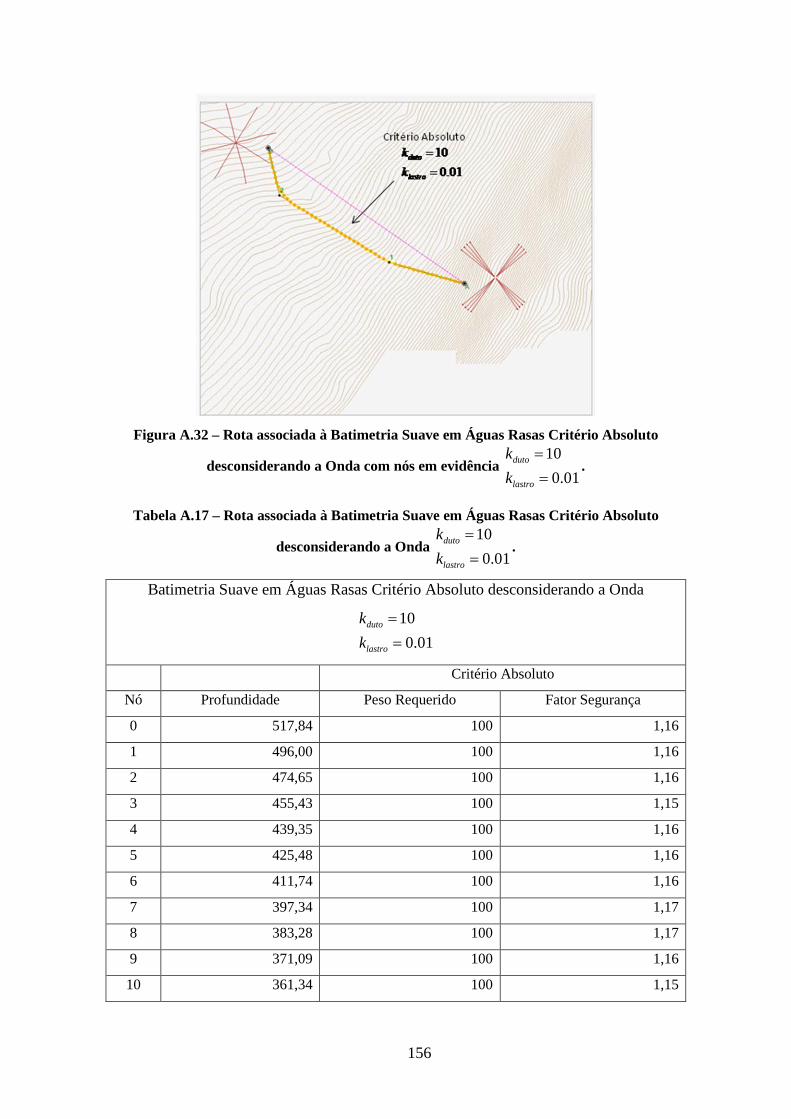
156
Figura A.32 – Rota associada à Batimetria Suave em Águas Rasas Critério Absoluto
desconsiderando a Onda com nós em evidência 100.01
duto
lastro
kk
==
.
Tabela A.17 – Rota associada à Batimetria Suave em Águas Rasas Critério Absoluto
desconsiderando a Onda 100.01
duto
lastro
kk
==
.
Batimetria Suave em Águas Rasas Critério Absoluto desconsiderando a Onda
100.01
duto
lastro
kk
==
Critério Absoluto
Nó Profundidade Peso Requerido Fator Segurança
0 517,84 100 1,16
1 496,00 100 1,16
2 474,65 100 1,16
3 455,43 100 1,15
4 439,35 100 1,16
5 425,48 100 1,16
6 411,74 100 1,16
7 397,34 100 1,17
8 383,28 100 1,17
9 371,09 100 1,16
10 361,34 100 1,15

157
11 352,66 100 1,14
12 344,26 100 1,14
13 335,75 100 1,14
14 326,71 100 1,14
15 315,35 200 1,27
16 301,09 200 1,13
17 287,67 300 1,28
18 276,21 300 1,29
19 265,33 200 1,10
20 254,75 200 1,10
21 244,13 200 1,10
22 233,30 200 1,10
23 222,19 200 1,10
24 210,94 200 1,10
25 200,24 200 1,10
26 190,30 200 1,10
27 180,61 200 1,11
28 171,38 200 1,11
29 163,13 200 1,11
30 156,07 200 1,10
31 149,89 200 1,11
32 143,96 200 1,10
33 138,02 200 1,11
34 131,60 200 1,12
35 125,58 200 1,11
36 119,70 200 1,12
37 113,23 200 1,12
38 107,17 300 1,27
39 100,50 300 1,24
40 93,44 300 1,21
41 86,74 300 1,23
42 79,67 200 1,11
43 72,31 200 1,20
44 64,85 100 1,12
45 56,84 100 1,19
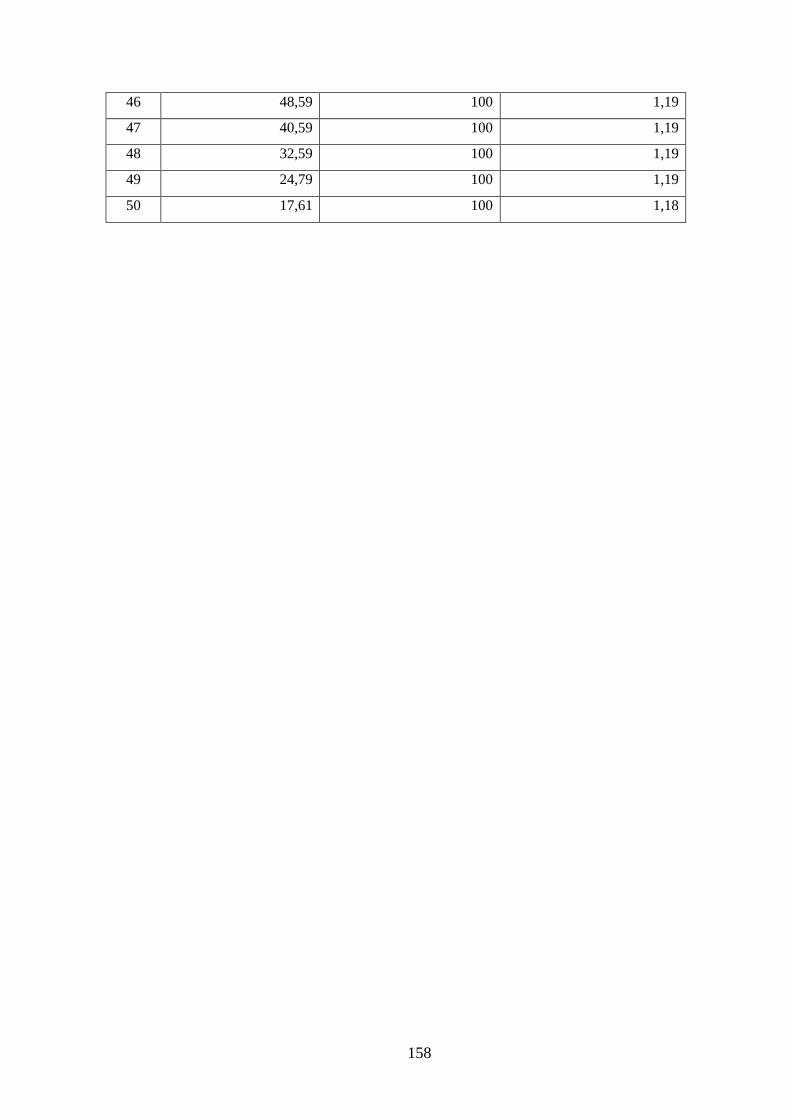
158
46 48,59 100 1,19
47 40,59 100 1,19
48 32,59 100 1,19
49 24,79 100 1,19
50 17,61 100 1,18