on the optimization of composite flywheel rotors
TRANSCRIPT

The Pennsylvania State University
The Graduate School
College of Engineering
ON THE OPTIMIZATION OF COMPOSITE FLYWHEEL ROTORS
A Dissertation inEngineering Science and Mechanics
byJacob Wayne Ross
c© 2013 Jacob Wayne Ross
Submitted in Partial Fulfillmentof the Requirements
for the Degree of
Doctor of Philosophy
August 2013

The dissertation of Jacob Wayne Ross was reviewed and approved* by the following:
Charles E. BakisDistinguished Professor of Engineering Science and MechanicsDissertation Advisor, Committee Chair
Renata S. EngelProfessor of Engineering Science and Mechanics and Engineering DesignAssociate Dean for Undergraduate Studies and International Programs
George A. LesieutreProfessor of Aerospace EngineeringDepartment Head of Aerospace Engineering
Albert E. SegallProfessor of Engineering Science and Mechanics
Judith A. ToddProfessor of Engineering Science and MechanicsP. B. Breneman Department Head of Engineering Science and Mechanics
*Signatures are on file in the Graduate School.

Abstract
Energy storing flywheel rotor technology has yet to be fully optimized given the design
possibilities. There have been many design approaches that have been published over the
years, but no overall comparisons of the many manufacturable design options have been
put forth. This research increases understanding of how boundary constraints coupled with
optimization objective selection can affect optimized designs. This research also compares
different design options by searching for the global optimum for all cases investigated: (A)
varying the fiber/matrix ratio of each material ring in the composite rotor; (B) including
radial fibers in addition to the circumferential fibers for each material ring; (C) co-mingling
two fiber materials with a variable ratio in each material ring; (D) material ring press-
fitting; and (E) matrix ballasting, where high-density particles can infiltrate the matrix
to vary the density, stiffness, and thermal coefficient of expansion within each material
ring. The results show that fixing both the outer and inner rotor radii in an optimization
search produces a highly restrictive design constraint compared to when at least one of the
radii are allowed to vary. The combinations that hold the most promise without producing
overly restrictive, trivial, or degenerate solutions are as follows: (1) total stored energy,
fixed outer radius, (2) specific energy, fixed outer radius, with a minimum total stored
energy constraint. Concerning the design options, (B) has been shown to be a very poor
design choice and should not be used. Option (D) has shown to have great potential in
maximizing both total stored energy and specific energy, being the single best design option
investigated. However, if the inner radius is allowed to vary, the total stored energy can be
comparably maximized by combining options (C) and (E). Option (E) was found to be the
second best design option with consistent reliability in improving performance.
iii

Contents
List of Figures viii
List of Tables xiii
List of Symbols xvi
Acknowledgments xxi
1 Introduction 1
1.1 Energy Storage Technology Overview . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Automotive Sector . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.2 Electrical Utility Sector . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3 Organizational Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 Literature Review 17
2.1 Research Work: Up To the 1990s . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Research Work: 1990s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3 Research Work: 2000s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4 Research Work: 2010 To The Present . . . . . . . . . . . . . . . . . . . . . 45
2.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3 Objectives 52
3.1 Phase I: Objective/Constraint Investigation . . . . . . . . . . . . . . . . . . 52
iv

3.2 Phase II: Design Option Investigation . . . . . . . . . . . . . . . . . . . . . 54
3.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4 Methodology 56
4.1 Phase I: Objective/Constraint Investigation . . . . . . . . . . . . . . . . . . 56
4.2 Phase II: Design Option Investigation . . . . . . . . . . . . . . . . . . . . . 58
4.3 Single Ring Rotor Program . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.4 Multiple Ring Rotor Optimization Program . . . . . . . . . . . . . . . . . . 61
4.4.1 Analytic Formulation & Material Models . . . . . . . . . . . . . . . 61
4.4.2 Optimization Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.4.3 Penalty Factors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.4.4 Program Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.4.5 Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5 Results & Discussion 72
5.1 Phase I: Objective/Constraint Investigation . . . . . . . . . . . . . . . . . . 72
5.1.1 Fixed Inner & Outer Radii . . . . . . . . . . . . . . . . . . . . . . . 74
5.1.2 2–B: Enclosed Volume Energy Density, Fixed Inner Radius . . . . . 74
5.1.3 2–C: Enclosed Volume Energy Density, Fixed Outer Radius . . . . . 75
5.1.4 1–D: Total Stored Energy, Constraint-Free Radii . . . . . . . . . . . 76
5.1.5 2–D: Enclosed Volume Energy Density, Constraint-Free Radii . . . . 78
5.1.6 1–B: Total Stored Energy, Fixed Inner Radius . . . . . . . . . . . . . 79
5.1.7 4–C: Specific Energy, Fixed Outer Radius . . . . . . . . . . . . . . . 80
5.1.8 4–B: Specific Energy, Fixed Inner Radius . . . . . . . . . . . . . . . 86
5.1.9 4–D: Specific Energy, Constraint-Free Radii . . . . . . . . . . . . . . 87
5.1.10 3–C: Material Volume Energy Density, Fixed Outer Radius . . . . . 89
5.1.11 3–B: Material Volume Energy Density, Fixed Inner Radius . . . . . 90
5.1.12 3–D: Material Volume Energy Density, Constraint-Free Radii . . . . 92
5.1.13 The Remaining Combinations . . . . . . . . . . . . . . . . . . . . . . 93
v

5.2 Phase II: Design Option Investigation . . . . . . . . . . . . . . . . . . . . . 94
5.2.1 Variable Fiber/Matrix Option . . . . . . . . . . . . . . . . . . . . . . 94
5.2.2 Radial/Hoop Fiber Option . . . . . . . . . . . . . . . . . . . . . . . 95
5.2.3 Two-Fiber Co-mingling Option . . . . . . . . . . . . . . . . . . . . . 97
5.2.4 Press-fitting Option . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.2.5 Matrix Ballasting Option . . . . . . . . . . . . . . . . . . . . . . . . 100
5.2.6 Comparing the Valid Objective/Constraint Combinations . . . . . . 102
5.2.7 Best Rotor Design Option Combinations . . . . . . . . . . . . . . . . 102
6 Conclusions & Recommendations 104
6.1 Phase I: Objective/Constraint Investigation . . . . . . . . . . . . . . . . . . 104
6.2 Phase II: Design Option Investigation . . . . . . . . . . . . . . . . . . . . . 106
6.2.1 Design Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
6.2.2 Material Selections . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.2.3 Objective Constraint Combinations . . . . . . . . . . . . . . . . . . . 109
6.2.4 Convergence Issues . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
6.3 Avenues for Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Bibliography 112
Appendix A. Analytic Formulations 118
A.1 Single Ring Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
A.2 Multiple Ring Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
A.2.1 Stress Calculation Procedure . . . . . . . . . . . . . . . . . . . . . . 129
Appendix B. Composite Material Properties 131
Appendix C. Composite Material Models 135
C.1 Preliminary Calculation Models . . . . . . . . . . . . . . . . . . . . . . . . . 135
C.2 Ballast Calculations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
C.3 Single Fiber Calculations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
C.4 Two-Fiber Calculations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
vi

C.5 Two-Ply Laminate Calculations . . . . . . . . . . . . . . . . . . . . . . . . . 141
Appendix D. Multiple Ring Rotor Optimization Program Results 143
D.1 Total Stored Energy, Fixed Radii . . . . . . . . . . . . . . . . . . . . . . . . 144
D.2 Total Stored Energy, Fixed Inner Radius . . . . . . . . . . . . . . . . . . . . 150
D.3 Total Stored Energy, Fixed Outer Radius . . . . . . . . . . . . . . . . . . . 156
D.4 Specific Energy, Fixed Radii . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Appendix E. Nontechnical Abstract 168
vii
List of Figures
1.1 Components necessary for inserting a high-voltage battery to a vehicle for
propulsion. Engine and transmission for a hybrid powertrain are not shown. 4
1.2 Components necessary for inserting a capacitor bank into a vehicle for propul-
sion. Engine and transmission for a hybrid powertrain are not shown. . . . 7
1.3 Components necessary for inserting a flywheel system based on electrical
energy transmission into a vehicle for propulsion. Engine and transmission
for a hybrid powertrain are not shown. . . . . . . . . . . . . . . . . . . . . . 10
1.4 Components necessary for inserting a flywheel system based on mechanical
energy transmission into a vehicle for propulsion. Engine and transmission
for a hybrid powertrain are not shown. . . . . . . . . . . . . . . . . . . . . . 11
2.1 One rotor design technique for multiple ring flywheel rotors is to incorporate
a hyperelastic interlayer between the composite rings to reduce peak radial
stresses throughout the entire rotor. . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Axial profiles and shape factors for flywheels using isotropic materials [16]. 22
2.3 Flywheel design developed by General Electric Company [16, 4]. Left is a
picture of the flywheel. Right is a drawing of the design. . . . . . . . . . . . 23
2.4 Flywheel design by Garrett AiResearch [16]. Left is a picture of the flywheel.
Right is a drawing of the design. . . . . . . . . . . . . . . . . . . . . . . . . 24
2.5 Flywheel design by the AVCO Corporation [16]. Left is a drawing of the
continuous bidirectionally woven ply. Right is a drawing of the assembled
flywheel with a nylon hub. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.6 A sample of two of the flywheel designs investigated by Ikegami et al. [17]. 26
viii
2.7 Ring disks of complementary varying thickness corresponding to radial and
hoop stress distributions proposed by Miyata [19]. . . . . . . . . . . . . . . 27
2.8 Schematic of chord winding around a filament-wound composite ring. The
pole radius is denoted rp, inner ring radius a, outer ring radius b, chord
thickness hc, and ring thickness is denoted H [20]. . . . . . . . . . . . . . . 28
2.9 Multi-ring flywheel design that was analyzed and tested by Gabrys and Bakis
[22]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.10 Multi-direction composite flywheel design by Gowayed et al. [31]. . . . . . . 37
2.11 Cases investigated by Portnov et al. with (a) showing in-plane translation
and (b) showing out-of-plane rotation [34]. . . . . . . . . . . . . . . . . . . . 40
2.12 Example of varying the ply angle for the radial plies of the single ring flywheel
[37]. Hoop plies are not shown. . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.13 Split-type hub design first investigated by Ha et al. [46], then by Krack et
al. [45]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.14 Three rotor design cases with four material rings of co-mingled fiber with
carbon and glass tows, and press fitting in two of the cases [47]. . . . . . . . 49
3.1 Illustrative description of the five rotor design options to be investigated. . 54
4.1 The Schwefel test function in two dimensions. This test function is multi-
modal with a deceptive optimum at the corner of the search space. . . . . . 63
4.2 An illustration of how the CMA-ES uses a displacement vector and covari-
ance matrix to move, scale, shape, and orient the next generation statistical
distribution [62]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3 Step size control illustration showing a step size that is too large (left), too
small (right), and appropriate (middle) [62]. . . . . . . . . . . . . . . . . . . 65
4.4 Graphical illustration of hard and soft penalty factors applied in one dimension. 69
4.5 Flowchart of decision and calculation procedure when incorporating penalties
into the objective calculation. . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.1 Notational illustration of the optimization case coding scheme used for the
figures and tables in Appendix D. . . . . . . . . . . . . . . . . . . . . . . . . 73
ix

5.2 Notional illustration of radial and hoop stress distributions in a spinning,
single-material ring with zero, compressive, and tensile inner boundary radial
stresses P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.3 For a fixed inner and outer radius, optimal solutions for K, Kev, and Kmv
are identical. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.4 For a fixed outer radius, the optimal K search converges on a physically
realistic solution identical to the optimal Kev. . . . . . . . . . . . . . . . . . 76
5.5 The maximum K for a single-material ring of fixed outer radius as a function
of inner radius with a series of curves corresponding to P values of –0.8, 0,
and +0.8 of YT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.6 Optimized K for a single-material ring as a function of outer radius with
various P values ranging from –0.8 to +0.8 of YT with both ri and ro allowed
to vary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.7 For objective/constraint combination 1–D, the optimal K search produces
an infinitely large ring with the same λ factors as that of 1–C. . . . . . . . . 79
5.8 Optimized Kev for a single-material ring various P values ranging from –0.8
to +0.8 of YT with both ri and ro allowed to vary. . . . . . . . . . . . . . . 80
5.9 The maximumKm for a single-material ring of fixed outer radius as a function
of inner radius with a series of curves corresponding to P values of –0.8, 0,
and +0.8 of YT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.10 Optimized Km for a single-material ring with various P values ranging from
–0.8 to 0 times the value YT with both ri and ro allowed to vary. . . . . . . 85
5.11 For objective/constraint combinations 3–B, 3–C, 4–B, 4–C, the optimal Km
or Kmv search produces an infinitesimally thin ring that is scale invariant. . 87
5.12 The maximum Kmv for a single-material ring of fixed outer radius as a func-
tion of inner radius with a series of curves corresponding to P values of –0.8,
0, and +0.8 of YT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.13 Optimized Kmv for a single-material ring with various P values ranging from
–0.8 to 0 times the value YT with both ri and ro allowed to vary. . . . . . . 92
x

5.14 Hoop and radial ply stresses for the radial direction under processing tem-
perature change loading of ∆T = −110 ◦C without any centrifugal loading
corresponding to the optimal case E-O-B-110 with one ring. . . . . . . . . . 97
5.15 Notational illustration of the optimization behavior of design option (B),
showing that a step change in the optimization as the last fiber in a direction
is removed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
D.1 Energy objective with both radii fixed at 100 mm and 250 mm. Includes zero
and one design option selected. . . . . . . . . . . . . . . . . . . . . . . . . . 145
D.2 Energy objective with both radii fixed at 100 mm and 250 mm. Includes two
design options selected. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
D.3 Energy objective with both radii fixed at 100 mm and 250 mm. Includes
three design options selected. . . . . . . . . . . . . . . . . . . . . . . . . . . 147
D.4 Energy objective with both radii fixed at 100 mm and 250 mm. Includes four
and all five design options selected. . . . . . . . . . . . . . . . . . . . . . . . 148
D.5 Energy objective with both radii fixed at 100 mm and 250 mm. Includes all
the design options except for design options (B) and (D). . . . . . . . . . . 149
D.6 Energy objective with the inner radius fixed at 100 mm. Includes zero and
one design option selected. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
D.7 Energy objective with the inner radius fixed at 100 mm. Includes two design
options selected. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
D.8 Energy objective with the inner radius fixed at 100 mm. Includes three design
options selected. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
D.9 Energy objective with the inner radius fixed at 100 mm. Includes four and
all five design options selected. . . . . . . . . . . . . . . . . . . . . . . . . . 154
D.10 Energy objective with the inner radius fixed at 100 mm. Includes all the
design options except for design options (B) and (D). . . . . . . . . . . . . . 155
D.11 Energy objective with the outer radius fixed at 250 mm. Includes zero and
one design option selected. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
xi

D.12 Energy objective with the outer radius fixed at 250 mm. Includes two design
options selected. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
D.13 Energy objective with the outer radius fixed at 250 mm. Includes three design
options selected. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
D.14 Energy objective with the outer radius fixed at 250 mm. Includes four and
all five design options selected. . . . . . . . . . . . . . . . . . . . . . . . . . 160
D.15 Energy objective with the outer radius fixed at 250 mm. Includes all the
design options except for design options (B) and (D). . . . . . . . . . . . . . 161
D.16 Specific energy objective with both radii fixed at 100 mm and 250 mm.
Includes zero and one design option selected. Units are in W·h/kg. . . . . . 163
D.17 Specific energy objective with both radii fixed at 100 mm and 250 mm.
Includes two design options selected. . . . . . . . . . . . . . . . . . . . . . . 164
D.18 Specific energy objective with both radii fixed at 100 mm and 250 mm.
Includes three design options selected. . . . . . . . . . . . . . . . . . . . . . 165
D.19 Specific energy objective with both radii fixed at 100 mm and 250 mm.
Includes four and all five design options selected. . . . . . . . . . . . . . . . 166
D.20 Specific energy objective with both radii fixed at 100 mm and 250 mm.
Includes all the design options except for design options (B) and (D). . . . . 167
xii

List of Tables
1.1 Specific energy and power for automotive energy storage technologies [1,
2, 3, 4, 5]. * Entire flywheel system specific power, including all auxiliary
components. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3.1 Optimization objective validity and equivalency for different radial constraint
combinations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.1 Design option combinations investigated for a given objective/constraint com-
bination. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.1 Flywheel single ring rotor results using the multiple ring rotor program with
design option (A) selected. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.2 Converged results for combination 4–C with the default design options as
well as (A), (C), and (E). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.3 Converged results for combination 4–B with the default design options as
well as (A), (C), and (E). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.4 Converged results for combination 3–C with the default design options as
well as (A), (C), and (E). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.5 Converged results for combination 3–C with the default design options as
well as (A), (C), and (E). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.6 Best designs with (A) for three rings on each of the three valid objec-
tive/constraint combinations. . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.7 Best designs with (C) for three rings on each of the three valid objective/constraint
combinations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
xiii

5.8 Best designs with (D) for three rings on each of the three valid objec-
tive/constraint combinations. . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.9 Best designs with (E) for three rings on each of the three valid objective/constraint
combinations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.10 Best designs for three rings on each of the three valid objective/constraint
combinations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.1 Optimization objective validity and equivalency for different radius constraint
combinations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
B.1 Material properties of selected unidirectional fiber composite materials for
the single material ring rotor optimization program [25, 66]. . . . . . . . . . 132
B.2 Densities, composite volume fractions, elastic moduli, and Poisson’s ratios
for the multiple ring rotor program composite materials database. . . . . . 132
B.3 Longitudinal and transverse elastic moduli and coefficients of thermal expan-
sion for the multiple ring rotor program composite materials database. . . . 133
B.4 Longitudinal and transverse tensile and compressive strengths for the multi-
ple ring rotor program composite materials database. . . . . . . . . . . . . . 133
B.5 Epoxy matrix density, Poisson’s ratios, elastic moduli, and coefficients of
thermal expansion for the multiple ring rotor program composite materials
database. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
B.6 Ballast material density, Poisson’s Ratios, elastic moduli, and coefficients of
thermal expansion for the multiple ring rotor program composite materials
database. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
D.1 Energy objective with both radii fixed at 100 mm and 250 mm. Best results
after 75,000 optimization runs. Gray shading indicates convergence failure.
Units are in kW·h. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
D.2 Energy objective with the inner radius fixed at 100 mm. Best results after
35,000 optimization runs. Gray shading indicates convergence failure. Units
are in kW·h. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
xiv

D.3 Energy objective with the outer radius fixed at 250 mm. Best results after
75,000 optimization runs. Gray shading indicates convergence failure. Units
are in kW·h. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
D.4 Specific energy objective with both radii fixed at 100 mm and 250 mm. Best
results after 75,000 optimization runs. Gray shading indicates convergence
failure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
xv

List of Symbols
a Inner ring radius of flywheel
b Outer ring radius of flywheel
c Vector for integration constants
f Force loading vector
fsoft Exponential decay soft penalty factor
g Matrix for radial coordinate integration constant multiplication
h Axial length or thickness
hc Chord axial thickness of chord flywheel
iiGA Island Injection Genetic Algorithm
k Single material ring stiffness matrix
m Mass
r Radius, radial coordinate
rp Pole radius of chord flywheel
sGA Simple Genetic Algorithm
u Displacement
v Velocity
x constraint parameter
xo constraint parameter limit
A Ballasting shear modulus factor
B Ballasting shear modulus factor
C Ballasting shear modulus factor
xvi

Cp Integration constant
E Young’s modulus
F Global laoding vectors
FEM Finite Element Modeling
G Shear Modulus
GPS Generalized Plane Strain
H Total axial length of chord flywheel
I∗ A -1, 1 diagonal matrix
K Kinetic energy, total stored energy, global stiffness matrix, bulk modulus
Km Specific energy
Kmv Material volume energy density
Kev Enclosed volume energy density
L Dimensionless radial coordinate factor
LLNL Lawrence Livermore National Laboratory
MGPS Modified Generalized Plane Strain
MLC Magnetically Loaded Composite
Qpq Element of the stiffness matrix
P Inner radial boundary stress, indivdual variable penalty
PGA Parallel Genetic Algorithm
PIM Power Inverter Module
PS Plane Stress
R Tsai-Wu failure factor
Spq Element of the compliance matrix
SA Simulated Annealing
SOC State Of Charge
U Global displacement vector
UPS Uninterrupted Power Supply
V Volume fraction
W Outer radial boundary stress
xvii

X Hoop/longitudinal direction strength
Y Radial/transverse direction strength
Z Tsai-Wu Failure vector and matrix
α Coefficient of thermal expansion
β Coefficient of moisture expansion
γ Shear strain
δ Interference Displacement
ε Normal strain
ε0 Constant strain for a GPS assumption
ε1 Strain coefficient for linearly varying strain of a MGPS assumption
ζ Material ring inner-to-outer radius ratio factors
η Halpin-Tsai factor, ballasting shear modulus factor
κ Dimensionless principal stiffness element factor
λ Rotor inner-to-outer radius ratio
µ Dimensionless hoop/radial elastic modulus factor
ν Poisson’s ratio
ξ Halpin-Tsai empirical factor
ρ Mass density
σ Normal stress
τ Shear stress
φp Material property notational simplification factor
χ Radius variable to outer radius ratio
ω Angular velocity
∆C Moisture change
∆T Temperature change
Φ Material property notational simplification matrix
Subscripts:
xviii

1 Longitudinal composite direction
2 Transverse composite direction
b Boundary-related factor
h Hoop direction
hard Hard Penalty variable
i Inner radial boundary
o Outer radial boundary
r Radial coordinate, radial direction, radial ply
soft Soft penalty variable
z Axial coordinate
C Compressive stress
T Tensile Stress, Halpin-Tsai parameter
ε Strain-related factor
δ Interference-related factor
θ Angular or circumferential coordinate
σ Stress-related factor
ω Centrifugal loading
∆T Temperature change
5 θz shear component
6 θr shear component
Superscripts:
1 Co-mingling composite material number
2 Co-mingling composite material number
2 Transverse composite direction
b ballast material property
e epoxy material property
f Fiber-related property
m Matrix-related property
xix

n Ring number, increasing number with increasing radius
N Number of material rings
T Transpose
xx

Acknowledgments
I would like to thank Dr. Joel R. Anstrom, the Thomas D. Larson Pennsylvania Trans-
portation Institute, and the Graduate Automotive Technology Education (GATE) Center
for providing funding, energy conversion educational resources, and hands-on research op-
portunities in energy-related issues. This work was also supported in part through instru-
mentation funded by the National Science Foundation through grant OCI–0821527.
xxi

Chapter 1
Introduction
Throughout history, flywheels have been used as energy storage and load-leveling devices
for a variety of purposes that include speed control of a potter’s wheel and inertial loading
of engines. However, only within the last century have flywheels begun to approach the
power and energy densities required for industrial and transportation applications. Much
of this progress is due to the invention of fiber-reinforced composites. Based on the classical
kinetic energy equation, the kinetic energy of a system varies linearly with the mass but
quadratically with the velocity, which is shown in Equation 1.1.
K =1
2mv2 =
1
2mr2ω2 (1.1)
where:K: Kinetic energym: Massr: Radiusv: Velocityω: Angular velocity
Since the energy stored grows faster with velocity than with mass, it is preferred to
have a light, high-speed flywheel than a heavy, low-speed device. For centrifugal loading,
1

2
the stresses produced are also related to the velocity as shown in Equation 1.2.
σ = ρv2 = ρr2ω2 (1.2)
where:ρ: Mass Densityσ: Normal stress
Like the energy, the stresses produced in a flywheel from centrifugal loading are pro-
portional to the square of the velocity. Therefore, a popular method to produce a high-
performance flywheel is to build it out of a material that has high strength characteristics
to obtain high angular speeds. Many types of carbon fibers have stiffness, strength, and
mass density characteristics in the fiber direction that are superior to those of metal alloys,
making them the good candidates to improve flywheel performance. However, flywheel
technology has become a minor contributor compared to other energy storage technologies.
Research for chemical batteries has been popular, and high power density ultracapacitors
have been garnering significant research interest. A brief review of various energy storage
technologies can provide justification for how flywheels can contribute to energy storage
technology demands.
1.1 Energy Storage Technology Overview
In society today, there are two primary commercial power technology sectors that can
benefit from energy storage technologies. These are the transportation and electrical power
utility sectors. In both sectors, kinetic energy storage devices have attractive characteristics
compared to both chemical batteries and ultracapacitors. For the transportation sector,
there is a need to provide high power in a very compact, lightweight package that is reliable
given a range of environmental conditions. For the power utilities industry, there is a need
to have technologies that have a very long life with low maintenance requirements.

3
1.1.1 Automotive Sector
For automotive applications, there are a number of requirements that must be satisfied in
order to produce an energy storage system that can be placed into a vehicle. Regardless of
the energy storage form, the energy must be delivered as kinetic energy to move the vehicle.
For a chemical battery, conversion technology is required such as a motor/generator and
a Power Inverter Module (PIM) to transform high voltage D/C power to three-phase A/C
electrical power that the motor generator can efficiently accept. For a capacitor bank, there
is an additional D/C to D/C converter module necessary to maintain a relatively constant
high voltage line to the PIM. For compressed air, a turbine/compressor would need to be
attached to the drive line. An alternative would be to use the compressed air to increase
the combustion pressure for an internal combustion engine. For flywheels, there can exist
another PIM for the motor/generator attached to the flywheel itself for an electromechanical
transmission. An alternative to the mechanical/electrical conversion of energy for a flywheel
would be a direct mechanical system.
Some of the latest industry technology product data can provide a rough comparison of
energy storage characteristics, which is given in Table 1.1. However, most of these values
do not incorporate the auxiliary component requirements, dynamic behaviors, or environ-
mental effects on these technologies. As indicated in Table 1.1, the specific power of the
compressed air is based on the turbine system used to recover the energy. Given an auto-
motive application, there are advantages and disadvantages for each of these technologies.
Table 1.1: Specific energy and power for automotive energy storage technologies [1, 2, 3, 4,5]. * Entire flywheel system specific power, including all auxiliary components.
Li-ionUltracapacitors
CompressedFlywheels
Batteries Air
Specific Energy131 4.0 28 72.8
(W·h/kg)
Specific Power2.4 5.6 Variable 2.64*
(kW/kg)

4
Chemical Batteries
The advantages chemical batteries have over the alternatives can be significant and have
led to their dominance as an energy storage technology. Batteries provide power directly in
an electrical form that maintains a constant D/C voltage throughout most of their energy
storage range. Such a capability simplifies energy transmission and reduces the required rec-
tifier component to transform the energy into a usable form for the motor/generator, which
is shown in Figure 1.1. Some Li-ion battery chemistry technology has become established
for large-scale use.
Figure 1.1: Components necessary for inserting a high-voltage battery to a vehicle forpropulsion. Engine and transmission for a hybrid powertrain are not shown.
With further research into improving this technology, continuous evolution is fully ex-

5
pected. Because batteries transform energy electro-chemically, they possess high efficiencies
that exceed those of heat engines for their operating range. Also, the latest Li-ion batteries
have very good performance characteristics. These characteristics make for a very compact
energy storage device. Nonetheless, there are many disadvantages with chemical batteries.
To ensure safe, reliable operation, many limitations are imposed on a chemical battery
system. Rechargeable batteries used in vehicles do not operate at their full State-Of-Charge
(SOC) range. To limit battery aging and degradation so that it can last throughout the
entire life of the vehicle, the maximum operation energy range is reduced. For the weather
conditions that most vehicles are designed to operate in, battery performance can degrade
or be limited significantly. Colder temperatures lower ion transport and increase the inter-
nal resistance of the battery, reducing the power, energy, and efficiency of the battery. High
temperatures increase the performance of the battery, but there are temperature-dependent
safety limitations for the materials used, requiring that performance be lowered. Because of
the thermal management required to keep the battery operating within a relatively narrow
temperature range, active auxiliary temperature control equipment must be added. The
thermal management may include metal fins and air blowers or coolant pumps for cool-
ing, and resistive heating elements or heat pumps for heating. Li-ion battery technologies
possess energy densities that are a significant fraction of what is normally considered for
explosive materials. In the case of an emergency where the battery is damaged and a short
circuit results, the battery can easily ignite. Poisonous gases from this fire must be directed
away from the vehicle through ducting, and the battery container must be sealed to pre-
vent infiltration into the passenger compartment. Another limitation is discharge speed.
Batteries become less efficient the faster they are loaded and can be damaged if loaded
too quickly. Battery management systems provide high-power constraints and limitations
related to the SOC, time away from the equilibrium, and charge/discharge rate. Once
the maximum charge for the high-power operation has been reached, the battery manage-
ment system will force the battery to operate at the lower discharge rate. Incorporating

6
nanoscale structure into batteries may increase performance, but it also has a tendency
to increase manufacturing complexity, and thus cost. This complexity adds to the already
cost-intensive manufacturing and materials procurement necessary to produce Li-ion bat-
teries. Li-ion batteries can have cycle life limitations due to battery aging. Li-ion batteries
are also much more sensitive to damage when being charged compared to being discharged,
meaning that the powers for charging may be less than for discharging. This factor limits
Li-ion battery regenerative braking energy absorption capabilities.
Ultracapacitors
The primary advantage of ultracapacitors is their high specific power [2]. Standard capaci-
tors store their energy strictly as an electrostatic potential. This energy storage mechanism
allows for fast charge or discharge for a given change in voltage. Electric double-layer capac-
itors, or ultracapacitors, have different characteristics than standard capacitors relating to
their use of an electrolyte for ion transport. In addition to higher specific powers, they have
longer cycle lives compared to chemical batteries that could last the life of an automotive
vehicle. Because there is ion transport for a very short distance without the burden of an
electro-chemical reaction, these devices are highly efficient with low resistive losses. As a
result, cooling requirements are significantly reduced, reducing system size and cost. Stan-
dard materials combined with established, simple manufacturing methods can also lower
device cost. Because performance characteristics are based on material properties of the
electrode, there is potential in improving the technology with better materials and fabrica-
tion techniques. Despite these advantages, there are issues that must be addressed when
using these devices.
Ultracapacitor energy storage is based on voltage; as the device releases its energy, the
voltage of the device changes. In order to ensure a reasonable voltage operation, a converter
capable of transforming large electrical power from a variable DC signal to a limited-voltage
range DC bus line, which is shown in Figure 1.2, would add significant weight to the system.

7
An ultracapacitor system would require some kind of containment in case there is dielectric
breakdown and the ultracapacitors explode. Electrolytic ultracapacitors have some of the
same problems as batteries. While power densities for capacitors are significantly higher
than the best chemical batteries, energy densities can be more than an order of magnitude
lower. This limitation restricts a capacitor bank that would be of comparable size to an
electric powertrain battery pack to only be able to satisfy pulse power requirements for a
hybrid powertrain.
Figure 1.2: Components necessary for inserting a capacitor bank into a vehicle for propul-sion. Engine and transmission for a hybrid powertrain are not shown.
Also, ultracapacitors have high self-discharge rates and cannot be used for long-term
energy storage. Having an electric powertrain based solely on ultracapacitors is not yet

8
feasible for personal vehicles. If a voltage difference is maintained for an extended period of
time, dielectric absorption can occur, preventing the ultracapacitors from fully discharging.
Because the electrolyte is a liquid, there are temperatures at which the electrolyte solidifies.
Even before then, ion transport is lowered by cold temperatures, increasing the internal
resistance of the ultracapacitors. Like batteries, ultracapacitors do not operate through
their entire energy range.
Compressed Air
Compressed air has an advantage in that the medium for storage is readily abundant. Direct
mechanical linkages to the drive line are possible. Different configurations can provide
different benefits. A configuration where there is a direct mechanical connection from the
compressor/turbine to the drive line can provide direct kinetic energy transmission. Another
configuration uses the compressed air to increase the compression pressures of the internal
combustion engine, using the released energy to improve engine performance. The cycle
life of the storage tank can match that of the vehicle. Nonetheless, there are disadvantages
with this technology.
The tank must be confined to a pressure vessel geometry for optimal energy storage and
may be awkward and space inefficient to place into a vehicle. Because the gas is heated as
it is compressed and cooled upon release, an active temperature management system may
be required for both heating and cooling of the gas. Self-discharge rates are dependent on
the tank sealing technology. Power capabilities and efficiencies are dependent on the size of
the turbine/compressor system.
Flywheels
There are many advantages to incorporating flywheels into a hybrid vehicle system. The
charge/discharge capability of flywheels that lead to high specific powers make for a practical
load-leveling assist to vehicles [5, 6]. Flywheels have a long cycle life that can match the life

9
of a vehicle. Even with contact bearings introducing friction into the system, short-term
efficiencies can be very high [5]. Also, an active temperature management system may
not be required for some of the flywheel systems, significantly reducing weight, space, and
cost requirements [5]. Many of the research developments of modern flywheel systems for
automobile use that have come within the last decade have made the difference between a
novel academic research topic and a competitive energy storage system worthy of industry
attention. Two of these advances are now discussed.
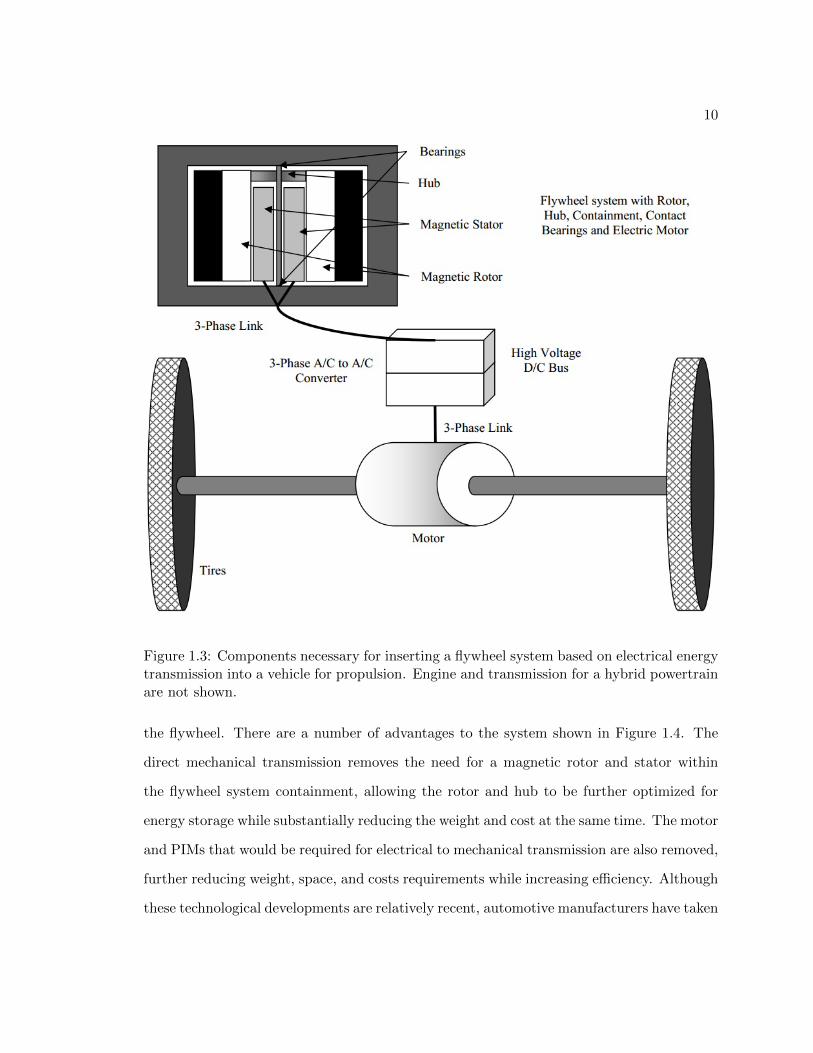
For the electrical power transmission shown in Figure 1.3, a significant innovation that
has been applied to flywheel rotors is the Magnetically Loaded Composite (MLC) [7]. This
technology incorporates ferromagnetic particles into the epoxy matrix of a composite, al-
lowing the composite matrix serve as a permanent magnet rotor for electrical energy trans-
mission. By using higher strength and stiffness materials such as glass/epoxy composites,
designers can produce higher strength rotors that are not handicapped by weaker, heavier
permanent magnet materials. Using this higher strength, the composite material increases
the specific energy of the rotor. Also, because the ferromagnetic particles are not in elec-
trical contact with each other and the composite material is not electrically conductive,
magnetically-induced eddy currents cannot form. Normally, the energy from the eddy cur-
rent losses is converted into thermal energy which would need to be removed from the
flywheel containment. The MLC rotor reduces motor losses due to eddy currents, increas-
ing the efficiency of the system. Also, a large temperature management system would have
to be employed to remove the heat generated from eddy current losses. Reduction of the
eddy current losses limits the need for a temperature management system, further reducing
the required weight, space, and cost of the flywheel system while increasing the efficiency.
Mechanical transmission of flywheel energy has been made more attractive by relatively
recent developments in vacuum sealing and continuously variable transmission technology
[5, 8, 9]. These technologies allow the flywheel to maintain a vacuum seal while producing
direct shaft work that allows for continuous conversion of speed and torque suitable to
10
Figure 1.3: Components necessary for inserting a flywheel system based on electrical energytransmission into a vehicle for propulsion. Engine and transmission for a hybrid powertrainare not shown.
the flywheel. There are a number of advantages to the system shown in Figure 1.4. The
direct mechanical transmission removes the need for a magnetic rotor and stator within
the flywheel system containment, allowing the rotor and hub to be further optimized for
energy storage while substantially reducing the weight and cost at the same time. The motor
and PIMs that would be required for electrical to mechanical transmission are also removed,
further reducing weight, space, and costs requirements while increasing efficiency. Although
these technological developments are relatively recent, automotive manufacturers have taken

11
notice, with Volvo announcing development and testing of this system in an automobile
[6]. Testing has shown promising results, and with the development of more sophisticated
control methods and techniques, further improvements are expected. Nonetheless, there are
disadvantages to both flywheel designs.
Figure 1.4: Components necessary for inserting a flywheel system based on mechanicalenergy transmission into a vehicle for propulsion. Engine and transmission for a hybridpowertrain are not shown.
Composite flywheels have limitations relating to the maximum strength of the flywheel.
The maximum strength of the composite can be reduced when factoring in loading fa-
tigue. For automotive applications, solid contact bearings are required which produce higher
amounts of friction compared to magnetic bearings. Use of contact bearings both decreases
the efficiency and increases the self-discharge rate of the flywheel. For electro-mechanical
transmission, two PIMs are required to transfer energy. These added components have the

12
negative effect of additional cost, weight, and space requirements compared to a chemical
battery while inducing switching losses for the high-power insulated-gate bipolar transistors.
For the mechanical transmission, there are additional losses at the vacuum lip seals from the
hermetic sealing fluid, further decreasing efficiency and increasing the self-discharge rate.
1.1.2 Electrical Utility Sector
The primary goals for producing viable energy storage technologies suited for utility grid
applications are to reduce the capital and maintenance costs. One reason to use energy
storage technologies for these applications is to provide an Uninterrupted Power Supply
(UPS) for emergency situations. Those institutions that require emergency backup systems
typically have emergency diesel generators for a longer term power outage, but require an
intermediate power solution for the time period between the start of the outage and the
time the generators have been brought online. Certain energy storage technologies can fill
in this gap.
Another reason why utilities may want to use energy storage technologies would be for
load-leveling purposes. Renewable energy sources provide power in an unreliable fashion.
Energy storage systems working in concert with renewable sources can serve as a buffer to
even out the power supplied to the grid. Even when using more predictable and reliable
power technologies, consumer demand can fluctuate significantly throughout the course of a
single day. Energy storage systems can provide load-leveling in this case as well, absorbing
energy during periods of low demand and dispensing energy during peak demand periods.
Given these scenarios, energy storage technologies must possess characteristics that are
different from that of automotive applications.
Chemical Batteries
For utility applications, capital cost can be the most important factor. Although higher
energy densities typically translate into smaller systems which reduce cost, the fact that

13
high performance battery technologies are currently expensive to produce tends to negate
this advantage. Utility companies also favor the reliability of established technologies. As
such, utilities typically choose lead-acid batteries for much of their energy storage needs.
Nonetheless, there are issues relating to chemical batteries. Temperatures for the battery
pack must be maintained within certain limits. The primary concern is colder temperatures
degrading battery performance. To provide a solution, waste heat from power plants can
provide adequate heating. If the battery system needs to be placed in a more isolated
setting, underground storage is an option. Regardless, both solutions incur higher cost.
For daily load-leveling use, life cycle issues for batteries are a limiting factor, with capital
cost per energy storage capability being a secondary limitation. Needing to replace the
battery pack every few years incurs high maintenance costs for utilities and makes batteries
unattractive for any kind of routine load-leveling function. Overall, inexpensive lead-acid
batteries are suitable for UPS applications, but chemical batteries are not suited to large-
scale load leveling in general.
Ultracapacitors
Ultracapacitor technology is not currently used as a energy storage technology for utility
applications in a large-scale manner. While the large cycle life limits are attractive, high self-
discharge rates along with dielectric absorption issues make this technology not suited for
the larger energy storage time scales that utilities have compared to automotive applications.
Also, the energy storage limitations are not justified given the high capital cost to construct
these devices. However, material advances can come in leaps and bounds. Therefore, the
viability of this technology is highly susceptible to change.
Compressed Air
Compressed air storage is competitive for large-scale load-leveling applications, but not well
suited for UPS applications [10]. Large-scale load-leveling is cost-effective due to the fact

14
that the storage tank is a large cavern that has already existed due to natural geological
phenomena or mining. Therefore, the large volume for storage is available at very low cost.
Also, the fact that the air storage is underground and has such a high volume eliminates
the need for temperature management of the storage tank. The availability of these caverns
limits the location of the storage unit, but an entire independent power plant can be run
for a suitably large cavern. Current applications include using the compressed air as a
combustion enhancer for natural gas power plants [11]. Applications being investigated
are coupling this technology with wind turbine power production. Compressed air energy
storage is not well suited for small scale UPS applications because the system must be
constructed at a fixed location, such as a hospital or existing power plant. These sites may
not have access to an existing large volume cavern. Producing high-pressure storage tanks
of the volume necessary for UPS applications significantly increases capital cost. Also, a
temperature management system may be required for the storage tanks, further reducing
cost-effectiveness.
Water Storage
Water storage has been a popular existing load-leveling technology for use in both the
utility and water management industries. The large reservoirs upstream of hydroelectric
dams serve as massive energy storage systems. Pumped water can be cost-effective if the
reservoirs can be constructed out of existing high-altitude locations where water can be
pumped up into the reservoirs for storage and released during periods of peak demand
[10, 11]. Water towers serve as a load-leveling mechanism for water management systems
and provide emergency water pressure in the case of electrical power outages. However,
hydro storage is not suited to UPS applications due to the fact that storing water in the
necessary quantities of mass and elevation would not be cost-effective.

15
Flywheels
For both emergency UPS and small-scale load-leveling applications, flywheel energy stor-
age has many attractive features. First, the high cycle life of flywheels translates into
lower maintenance costs. Flywheels are less temperature sensitive compared to batteries,
which improves reliability. Because utility applications require energy storage systems to
be stationary, flywheel system designs can incorporate different design features to improve
performance. The bearings used for stationary flywheel applications are typically magnetic
in nature. Removing all points of contact between the rotor and the rest of the system
significantly reduces frictional losses and related maintenance needs. Because the location
of the flywheels is somewhat arbitrary, these devices can be placed underground to minimize
the size of the containment for the flywheels; the earth would supply most of the contain-
ment. One utility equipment provider, Beacon Power Corporation, produces commercial
flywheels that it advertises requires maintenance once every twenty years [12]. Nonetheless,
flywheels are not as competitive as compressed air or water storage for large load-leveling
applications [10].
1.2 Conclusions
For both automotive and utility applications, there are multiple factors that must be ac-
counted for beyond the theoretical performance values given in research articles. There are
many ancillary system components beyond the raw energy storage medium that must be
accounted for in terms of added weight, space, and cost as well as parasitic power losses.
Additional factors such as long-term application in an environment subject to changing con-
ditions can also lower performance characteristics. Given these factors, flywheel systems are
competitive for certain applications and conditions. While not capable of providing long-
term energy storage for automotive applications, flywheel systems with mechanical energy
transmissions can be a competitive technology for hybrid vehicle applications where a pulse

16
power energy assists are useful. For utility application, flywheel systems can be competitive
for UPS systems and small-scale load-leveling assistance.
1.3 Organizational Structure
After this introduction, an overview of existing energy storing flywheel rotor research is
presented in Chapter 2. The time period spans from the 1970’s to the present time and
includes a variety of research projects with a many different goals and analysis methods.
From this information, the objectives of this research to add to the understanding of flywheel
optimization are given in Chapter 3. Next, the analysis methodology is provided in Chapter
4 and Appendices A, B, and C. The results along with their discussion are given in Chapter 5
and Appendix D. Last, the research conclusions and recommendations are given in Chapter
6.

Chapter 2
Literature Review
Relatively modern research into flywheels started in the 1960s and has progressed since then.
This literature review identifies significant research into rotor optimization throughout the
decades up to the present day. Different optimization objectives are considered with both
theoretical and experimental work. Various design ideas along with analytic formulations
are seen. The analytic formulations vary widely in both the simplifying assumptions used
and the manufacturing calculations made. For some research investigations, no manufactur-
ing factors are incorporated. These factors can include thermo-elastic effects from processing
temperature change due to epoxy curing, stresses from filament winding, autoclave pres-
sure loading, and material ring stress states from the press-fitting process depending on the
design. The material ring press-fitting process includes ensuring the material rings survive
manufacturing, then press-fitting, then zero load and centrifugal loading states. The various
phenomena associated with manufacturing are denoted as manufacturing method effects.
2.1 Research Work: Up To the 1990s
Before the advent of high-strength fibers in the late 1960s, flywheels were typically con-
structed out of various kinds of steel to provide load-leveling on a small scale, such as
engine flywheels. There were a few attempts to produce flywheels that could be used on
17

18
trains and buses, but the energy storage capabilities of the flywheels using metals were
still too heavy to be viable for transportation purposes [13]. However, with the advent of
aramid, carbon, and glass fibers, researchers began to contemplate the use of these fibers
in flywheels. The oil crisis of 1973 to 1974 caused many in the US to search for alternatives
to oil and ways to reduce the need fossil fuels altogether. The US Department of Defense
and Energy Research & Development Administration began funding multiple energy-related
research projects and national laboratories. Starting in the mid-to-late 1970s, researchers
began intensively investigating fiber reinforced composites for energy storage applications.
Some of the results of work by US national laboratory researchers was produced by
Christensen and Wu [14]. In their analysis, they chose a 2-D plane stress formulation with
a maximum strain failure criterion. The stress-strain relations are defined according to
Equation 2.1.
σθ
σr
=
Qθθ Qθr
Qrθ Qrr
εθ
εr
(2.1)
where:Qij : Element of the stiffness matrixε: Normal strain
subscripts:r: Radial coordinateθ: Angular or circumferential coordinate
Because they wanted to optimize the rotor design, they confined the optimal limit to be
a uniform, constant strain field throughout the rotor. They required that the flywheel fail
at every point simultaneously by achieving this uniform maximum strain throughout the
flywheel. They incorporated an axial thickness function into the stress equilibrium equa-
tion. All analysis was made in a strictly theoretical sense, with no material requirements
given except for the assumption that was cylindrically orthotropic. Given this formulation,

19
the authors demonstrated that the optimization of the flywheel in terms of specific energy
required only optimizing the axial thickness variation. The elastic property solution to
the optimal specific energy allows for variation in the radial and circumferential directions,
meaning that the fiber reinforcement can lie strictly in the radial direction, the circumfer-
ential direction, or anything in between and still produce an optimal design. Cases where
the Young’s moduli in the radial and circumferential directions were allowed to vary were
investigated in order to understand the axial thickness shape function that was evaluated.
A solution was found for the isotropic case becoming a solid disk , and rings—where the
thickness is zero at the center—for the radial and circumferential reinforcement cases. The
authors noted that for the same invariant stiffness properties, the solid isotropic disk was
preferred due to more efficient space use and no need for a hub. This analysis was theo-
retical only; no properties were inserted for definitive performance values. No checks for
processing temperature or manufacturing-related residual stresses were introduced.
Multi-ring flywheel optimization attempts were presented by Danfelt et al. around the
same time in 1977 [15]. In their research, the authors produced a formulation based on a 2-D
plane stress assumption. Their formulation was geared toward a finite element solution that
accommodated ring elements of different anisotropic materials and constant axial thickness.
The method for optimization was a trial-and-error procedure that started with attempting
to maximize the energy of one ring at a time, with each additional ring designed to produce
a distribution that satisfied the maximum stress failure criterion and was as uniform as
possible. Hyperelastic rubber acted as the interface between composite rings in order to
reduce the radial stresses, which is shown in Figure 2.1. For this numerical study, six
composite rings with five interlayers were used. Parametric studies were performed to
optimize the rotor design. The outer diameter was set to 914 mm and the inner diameter
was 50.8 mm. The material used was an aramid/epoxy composite for the large rings and
a rubber material for the interlayers. A baseline case of constant radial thickness and
properties for the composite and elastomeric rings were performed first. After this baseline,

20
the authors attempted to change the density with ballasting elements in the matrix material
of the composite rings to develop more uniform failure limits for the rings, but found that
it was not possible to do with density changes alone.
Figure 2.1: One rotor design technique for multiple ring flywheel rotors is to incorporate ahyperelastic interlayer between the composite rings to reduce peak radial stresses throughoutthe entire rotor.
Another variation case included changing the stiffness of the elastomeric interlayers.
The authors noted that changing the axial thickness of the rings would have only small
benefits since the in-plane stresses are fairly independent of axial thickness for multi-ring
flywheels with elastomeric interlayers. The last case study included varying both the density
and radial thickness of the composite rings. The highest specific energy obtained was 81.4
W·h/kg and came from varying the stiffness of the interlayers. The highest energy density

21
was 160 kW·h/m3, and was obtained by varying both the density and radial thickness of
the composite rings. The authors noted that this analysis was simply an overview of the
possible variations in flywheel design to provide optimization and did not provide a definitive
optimization strategy or solution. Curing temperature changes and manufacturing method
effects on the inherent stresses of the rotor were not included in the analysis.
During the period of 1975 to 1983, a program to develop high-performance flywheel
energy storage systems by various industry leaders was sponsored by the Department of
Energy and administered by Lawrence Livermore National Laboratory (LLNL) [16]. Devel-
opment research accelerated in 1978 as the laboratory partnered with the General Electric
Company to research flywheel system integration for automobiles. During these years,
LLNL performed comprehensive flywheel research that included material and manufactur-
ing process options surveys along with theoretical analysis into flywheel limits and rotor
dynamic stability. The shape profiles analyzed were based on an isotropic flywheel material
subjected to a maximum stress failure criterion. The optimal shape profile exhibits failure
at all points simultaneously and maximizes the specific energy, which is shown as the top
shape in Figure 2.2. Other profiles were given a shape factor that was defined by the ratio
of the given shape specific energy to the optimal shape specific energy.
In addition to this analysis, LLNL sponsored a competition between industry leaders to
design and develop flywheel designs for testing. After the initial design and test phase for
six competing flywheels were finished, three candidates were selected for further develop-
ment and testing. These candidate designs came from General Electric Company, Garrett
AiResearch, and the AVCO Corporation [16]. The General Electric flywheel design con-
sisted of an outer ring of filament-wound carbon/epoxy composite with a thick, inner ring
consisting of a glass fiber/epoxy prepreg with a quasi-isotropic layup. This design is shown
in Figure 2.3.
The Garrett AiResearch flywheel design consisted of fifteen aramid fiber rings that were
not bonded together. Layers of the rotor were separated by Teflon tape, which is shown in

22
Figure 2.2: Axial profiles and shape factors for flywheels using isotropic materials [16].
Figure 2.4. The hub was composed of graphite/epoxy struts bonded to aluminum sheets.
The AVCO Corporation flywheel consisted of a ring that contained a bidirectional weave
where fibers were placed in the hoop and radial directions. The goal of this weave was to
attempt to produce a constant stress profile where with radial fibers would interact with the
hoop fibers to transmit the outer hoop stresses to the inner hoop fibers, which is shown in
Figure 2.5. Manufacturing the flywheel rotor involved using a mold, but it did not specify

23
Figure 2.3: Flywheel design developed by General Electric Company [16, 4]. Left is a pictureof the flywheel. Right is a drawing of the design.
whether the disks were press consolidated, resin transfer molded, or whether a wet lay-up
was used. The hub was constructed of nylon with an aluminum shaft.
Given these three flywheel designs, the Garrett flywheel performed the best with the
highest recorded burst specific energy of 72.8 W·h/kg, and the General Electric flywheel
came in second with 68.0 W·h/kg [4]. The AVCO design had significant manufacturing
issues where they were only able to produce a single flywheel for testing. They were sub-
sequently dropped from the competition after testing of the single flywheel. For this com-
petition, the performance parameter of interest was specific energy and ancillary flywheel
system components were not factored into the design or economic analysis.
At the same time the LLNL final report was published, researchers in Japan were also
investigating design ideas for flywheels. The design by Ikegami et al. included a laminated
quasi-isotropic glass/epoxy composite with a carbon/epoxy outer ring that was filament
wound [17]. This design was highly similar to General Electric’s design and the design
parameters that were investigated included the hub radial and axial thicknesses as well
as ring radial and axial thicknesses. In this analysis, a 3-D axisymmetric finite element

24
Figure 2.4: Flywheel design by Garrett AiResearch [16]. Left is a picture of the flywheel.Right is a drawing of the design.
method was stated to be used. The failure criterion used was an interactive stress criterion
called Hoffman’s condition [17]. The flywheel designs shown include glass cloth rings that
had filament-wound reinforcement on the side as well as flywheels that had filament-wound
carbon fiber rings attached to a glass cloth inner ring that consisted of two thickness sections,
which is shown in Figure 2.6. For all cases, the inner diameter was set at 30 mm and the
outer diameter to 130 mm. Analysis was performed before experimental testing and included
six design test cases. The maximum angular speed for the best design was 62.2 krpm for
a tip speed of 847 m/s. The highest specific energy calculated for this design was 60.8
W·h/kg. Curing temperature changes and manufacturing method effects on the inherent
stresses of the rotor were not included in the analysis.
In 1984, Genta proposed a different design technique based on the 2-D plane stress
analysis that included stiffness and density tuning [18]. In addition to requiring a constant
hoop stress profile to maximize energy storage, Genta also chose to impose a zero radial
stress condition and a constant hoop-radial Poisson’s ratio throughout the flywheel rotor.
Based on these assumptions, equations for the hoop stiffness Eθ and composite density ρ
became functions of the radial location in the disk. He also noted that the radius-dependent

25
Figure 2.5: Flywheel design by the AVCO Corporation [16]. Left is a drawing of thecontinuous bidirectionally woven ply. Right is a drawing of the assembled flywheel with anylon hub.
axial thickness h(r) and radial stiffness Er fell out of the equations and were not required
to define the system. Also, a minimum inner-to-outer radius ratio λ for the flywheel ring
could be analytically determined. For his numerical discrete ring stress analysis, the author
chose to use a λ ratio of 0.4. Genta proposed that, based on this analysis, an optimum
design could be achieved by continuously varying the fiber content as a function of radius
to tune hoop stiffness as required. In order to continuously change the density with radial
location, Genta proposed incorporating a ballasting material such as lead particles into the
polymer matrix. After this optimization, the author noted that the axial thickness could
be varied separately to further optimize the design in the case that the condition of zero
radial stresses could not be completely met. If this condition could be met, the axial shape
profile would be irrelevant. Although he did not produce specific energy numbers, he did
propose that, for the case of approximated steps for ballasting and tuning the axial profile,
a shape factor of 0.365 could be achieved relative to an isotropic constant stress optimal
design. He admitted that the comparison was a stretch considering the material properties
were not constant for his design. No other optimal design information was given. For this

26
Figure 2.6: A sample of two of the flywheel designs investigated by Ikegami et al. [17].
analysis, no effects relating to induced stresses from temperature changes due to curing or
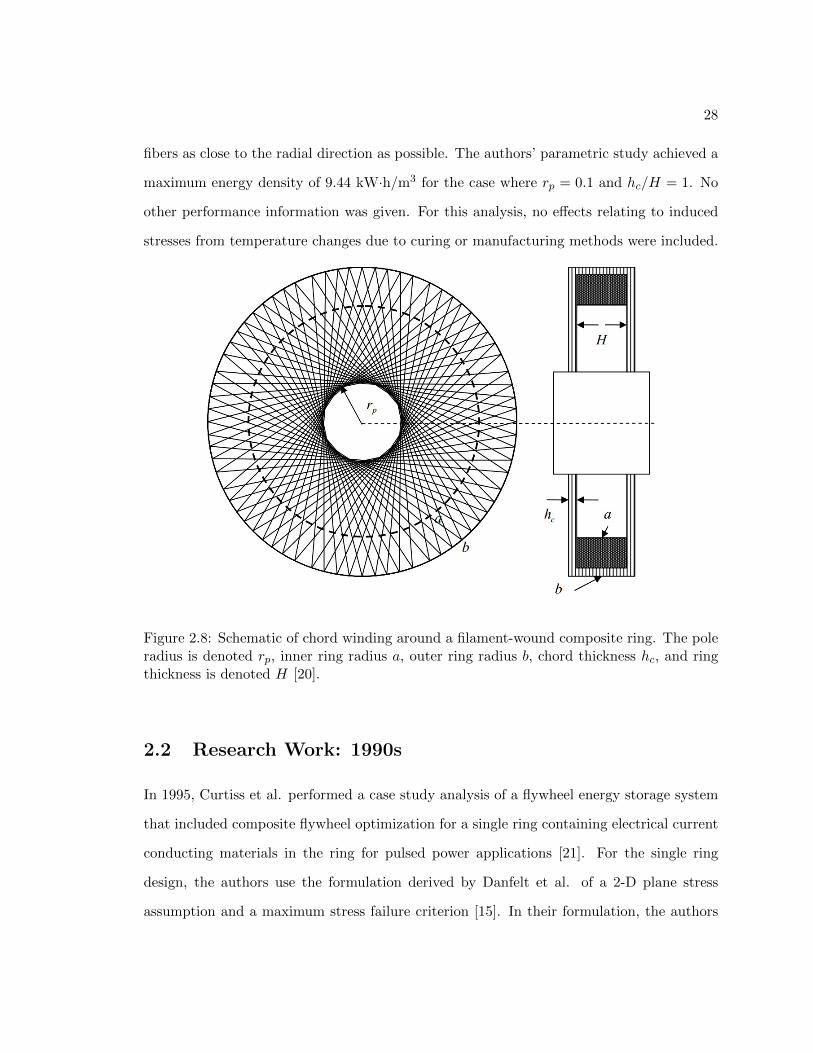
manufacturing methods were included.
Miyata proposed that, using a 2-D plane stress analysis that incorporated an axial
thickness parameter, it was possible to develop a solution that required the radial and
circumferential elastic moduli to be tuned so the stresses could match the strength limits
of the rotor [19]. The optimization parameter he used was energy density; however, the
volume included the vacant space lying within the hole of the flywheel ring. He proposed to
accomplish this tuning by placing one hoop fiber ply of variable thickness on top of a radial
fiber ply of complementary thickness so that when the plies come together, they produce a
layer that has a constant thickness. This is shown in Figure 2.7.
Carbon/epoxy composite material was used. For the numerical calculations, a λ value
of 0.2 was used. The failure criterion was maximum stress. Other than estimated shape

27
Figure 2.7: Ring disks of complementary varying thickness corresponding to radial andhoop stress distributions proposed by Miyata [19].
factors, no definitive performance data was given. For this analysis, no effects relating to
induced stresses from temperature changes due to curing or manufacturing methods were
included.
In 1988, Portnov and Kustova attempted to optimize chorded flywheel designs with
parametric studies [20]. The parameters chosen to be varied were the pole radius rp, of
which the chords were wrapped around, and the ratio of chord axial thickness hc to the axial
thickness of the filament-wound ring H. This is shown in Figure 2.8. The failure criterion
was maximum stress. The ring material was glass/epoxy, and the chord material was
carbon/epoxy. With these parameters selected, the filament-wound ring radial thickness was
tuned to produce an optimal design that corresponded to the flywheel failing simultaneously
due to radial stresses in the ring and the shear/tensile stresses acting on the chord fibers.
With this parametric study, the authors observed that as the ratio hc/H approaches unity,
the energy density reaches a maximum. This observation also corresponds to having a ring
with a radial-to-hoop fiber ratio of unity. Also, a maximum energy density was achieved by
reducing the pole radius rp to zero. This achievement corresponds to orienting the chord
28
fibers as close to the radial direction as possible. The authors’ parametric study achieved a
maximum energy density of 9.44 kW·h/m3 for the case where rp = 0.1 and hc/H = 1. No
other performance information was given. For this analysis, no effects relating to induced
stresses from temperature changes due to curing or manufacturing methods were included.
Figure 2.8: Schematic of chord winding around a filament-wound composite ring. The poleradius is denoted rp, inner ring radius a, outer ring radius b, chord thickness hc, and ringthickness is denoted H [20].
2.2 Research Work: 1990s
In 1995, Curtiss et al. performed a case study analysis of a flywheel energy storage system
that included composite flywheel optimization for a single ring containing electrical current
conducting materials in the ring for pulsed power applications [21]. For the single ring
design, the authors use the formulation derived by Danfelt et al. of a 2-D plane stress
assumption and a maximum stress failure criterion [15]. In their formulation, the authors

29
set λ to 0.5. Optimization was performed by tuning the ratio of hoop stiffness to radial
stiffness Eθ/Er. To be able to physically tune this parameter, the authors stacked different
plies of radial and hoop fiber orientations. This design was similar to Miyata’s as shown
in Figure 2.7 except that the ply thickness was constant throughout the radial thickness.
Carbon/epoxy composite material was used in the ring. Once the composite design was
optimized, the design was compared to that of isotropic materials such as high-strength
titanium and steel alloys. For this comparison, an aluminum conductor was placed in each of
the options as a uniform, zero-stiffness parasitic mass. For this analysis, the composite ring
was shown to be superior. However, the authors determined that a conductive aluminum
sheet was inferior to a copper Litz wire ply for electrical high-current applications. Since
the wires must be placed in some sort of non-conductive matrix, the composite ring was
produced. The optimized design incorporated a hoop/radial ply thickness ratio of 0.904
with a copper wire/composite ply thickness ratio of 0.23. This design analysis indicated
that a tip speed of 650 m/s can be achieved for a specific energy of 36.7 W·h/kg. For this
analysis, no effects relating to induced stresses from temperature changes due to curing
or manufacturing methods were included. Also, no hub stresses were incorporated into
the analysis. However, spin tests to failure were conducted on composite rings that had
fiber orientations that approximated the analytic designs. In spin testing, the first flywheel
failed by hub-ring debonding. The second flywheel failed from burst. In both cases, failure
indicated that analytic design limits could be attained.
In 1997, Gabrys and Bakis published a case study in design analysis and testing of
composite flywheel rings [22]. Equations for stresses were obtained from Genta [13] and
Lekhnitskii [23]. Equations given in Genta pertain to a 2-D plane stress analysis [13]. A
maximum stress failure criterion was used. These equations were used to analyze the three
flywheel designs given in the article. The first design included elastomeric interlayers to
minimize radial stress transmission between selected composite rings. For the interfaces
that do not have elastomeric urethane interfaces, the strategy was to place a ring with a

30
lower hoop stiffness/density ratio on the inside of a ring with a higher hoop stiffness/density
ratio. This is shown in Figure 2.9. The ring thickness selection and placement methodology
centered on the fact that the high-strength and stiffness T1000 Carbon fiber should be used
only where appropriate due to its high cost. The manufacturing methodology was discussed
in detail. A press-fitting technique was used to compress the rings in the radial direction
and counter the tensile radial stresses developed during centrifugal loading. The analysis
included residual stresses from both the press-fitting and processing temperature changes.
Figure 2.9: Multi-ring flywheel design that was analyzed and tested by Gabrys and Bakis[22].
Analysis of this first flywheel indicated that the failure would occur due to radial stresses
in the outermost ring. Theoretical analysis estimated the maximum ring speed to be 1715
m/s for a specific energy of 204 W·h/kg. Spin tests were unable to achieve sufficient speed
for failure. The first test failed due to mechanical separation of the flywheel hub and the
spin arbor. The second test was limited by the inability to achieve a sufficient vacuum in
the test rig. Air drag losses prevented the achievement of tip speeds beyond 1101 m/s.
The second design included an aluminum hub with a filament-wound S-2 glass fiber
composite thick ring with an elastomeric urethane matrix. The third design was identical
to the second except that the fiber used was AS4C carbon fiber. The advantage of the two
elastomeric matrix flywheels was that the matrix was highly compliant to the radial stress,

31
allowing for radial expansion as required during loading. When such a matrix material
was used, very thick rings could be manufactured for high centrifugal loading. Theoretical
analysis predicted a maximum tip speed of the second flywheel as 1025 m/s for a specific
energy of 74 W·hr/kg. For the third flywheel, a maximum tip speed of 1265 m/s was
predicted for a specific energy of 113 W·h/kg. For the experimental analysis, only the
second flywheel was tested. This flywheel had resonance vibration problems that were
being analyzed, but could not be resolved at the time of publishing.
In 1998, Ha et al. published a strictly theoretical optimization analysis that included
a 2-D plane strain formulation instead of plane stress [24]. The assumption corresponded
to a thick flywheel with multiple filament-wound rings and included press-fitting the rings
together. Press-fits were modeled using ring interface interference displacements. All ten
ring thicknesses were kept constant at 5 mm and the press-fit interference between the
rings were the variables to be optimized. Another set of variables the authors attempted to
optimize was the axial/hoop filament winding angles. Shear stresses and strains associated
with axial/hoop interactions are shown in Equation 2.2.
σθσrσzτθz
=
Qθθ Qθr Qθz Qθ5Qrθ Qrr Qrz Qr5Qzθ Qzr Qzz Qz5Q5θ Q5r Q5z Q55
εθεr
εz = 0γθz = 0
(2.2)
where:γ: Shear strainτ : Shear stress
Subscripts:z: Axial coordinate5: θz shear component
As can be seen, the plane strain condition of zero axial strain was applied. Also, the θz
shear stresses were incorporated into the analysis since the ply angles for each ring could
vary in the θz plane. The 3-D Tsai-Wu failure criterion was used to determine stress limits

32
[25]. For this analysis, no effects relating to induced stresses from temperature changes
due to curing were included. The optimization strategy included the use of a sequential
linear programming method to search the solution space and perform sensitivity studies.
Three case studies were performed. The first was the baseline case where the ply angles
were set to the hoop direction only and the interferences were set to zero. The second
case set the interferences to zero, but allowed the ply angles of the rings to vary freely.
The third case allowed the interferences to vary freely, but all ply angles were set to the
hoop direction only. The second case showed that a 29% improvement in specific energy
could be obtained over the baseline case of 29.3 W·h/kg by appropriately varying the θz
ply angles. The advantage comes from tuning the inner rings with large ply angles to
incur higher axial stresses, allowing more expansion in the radial direction, and thus lower
radial stresses. The third case showed that a 145% improvement in specific energy could
be obtained by varying the interferences between the rings. The third case produced an
optimum specific energy of 72.0 W·h/kg and a tip speed of 910 m/s. Sensitivity studies
show that optimizing interferences is substantially more important than ply angles. For this
analysis, no effects relating to induced stresses from temperature changes due to curing or
manufacturing methods were included.
In 1999, another paper by Ha et al. investigated the requirement of placing permanent
magnets along the inner radius of the flywheel to incorporate a motor/generator function in
the rotor. This magnet material placed a compressive stress condition along the inner radius
of the multi-ring rotor [26]. This strictly theoretical analysis used a plane strain assumption
with fibers wound in the hoop direction only, producing the stress-strain relations given in
Equation 2.3.
σθσrσz
=
Qθθ Qθr QθzQrθ Qrr QrzQzθ Qzr Qzz
εθεr
εz = 0
(2.3)
The optimization parameters for this flywheel setup were the material choices for each

33
ring, the inner and outer radii of the permanent magnet material, and the composite ring
thicknesses. The criteria used for acceptability were the Tsai-Wu 3-D stress failure criterion
and the minimum rotor voltage requirements generated by the magnets [25]. The minimum
voltage requirement criterion added a constraint on the geometry of the permanent magnet.
The compressive stresses of the permanent magnet on the composite ring during loading
constrained the outer radius of the flywheel ring. Overall, the inner and outer radii were
variables, but were constrained by the magnetic material conditions. The parameter for
optimization was the total stored energy of the flywheel. The authors started by investi-
gating the material sequence for the composite rings. The five composite materials selected
used glass, aramid, and three grades of carbon fiber as the choices for the rings. After
investigating the possible permutations, the authors concluded that having materials that
increase the stiffness/density ratio as the radius was increased provided the optimum se-
quence. After the sequence investigation, the authors chose to investigate magnet radii and
ring thicknesses in four sections. Section 1 consisted of three tests where only one compos-
ite ring was analyzed. Section 2 contained four cases where two rings were used unless the
program saw fit to impose a zero thickness on one of the rings. This scenario occurred in
one of these cases. Section 3 contained six cases where three rings were tested with two
cases where one of the rings was eliminated and one case where two rings were eliminated.
Section 4 contained five cases where four rings were permuted, with two cases of single ring
elimination and one case of double elimination. The best design found included four rings
in the sequence of glass, aramid, low-grade carbon, and high-grade carbon fiber. It was
predicted to attain a maximum total stored energy of 2010 W·h for a design with an inner
magnet radius of 29.6 mm and an outer radius of 151 mm. This result would indicate that
the more rings the flywheel contains, with the proper order, the higher the total stored en-
ergy can be. Also, the cases that had one or more rings eliminated occurred due to sequence
violation of the stiffness/density ratio observation. Usually, a higher stiffness/density ratio
fiber would be placed in an inner ring and would eliminate any lower stiffness/density ratio

34
ring outside of it. For this analysis, no effects relating to induced stresses from temperature
changes due to curing or manufacturing methods were included.
At roughly the same time, Eby et al. used the axial thickness parameter h(r) of isotropic
material flywheels as an optimization problem that could be used to test two types of ge-
netic algorithms [27]. First, a simple Genetic Algorithm (sGA) was used to determine the
optimum shape using one isotropic material with a plane stress assumption. This result
matched that of the well-known constant-stress profile. Next, the authors used this algo-
rithm to recalculate the design with a homogeneous outer boundary condition to eliminate
the requirement of a force on the outer radius of the flywheel. After this, an optimized
isotropic ring was determined as well given a set inner radius to provide results for a later
ring optimization test. These 2-D plane stress results were next used as the starting search
basis for more complex 3-D modeling. With the sGA determined valid for the plane stress
analysis, the authors chose to mix and match sGA with a modified Simulated Annealing
(SA) approach and an island injection Genetic Algorithm (iiGA). In the results of using
these algorithms separately or in conjunction with each other, the hybrid approach of using
SA along with a local search iiGA was proven to be the fastest. In this approach, the plane
stress sGA results were incorporated into a 3-D Finite Element Modeling (FEM) package
for higher refinement. Last, the problem complexity was increased with a higher number
of rings and multiple material selections. Also, a Parallel Genetic Algorithm (PGA) was
tested to compare to the various types of iiGA concepts tested previously. This test showed
that both the standalone and hybrid iiGAs produced superior results in a fraction of the
computational time compared to the PGAs. Because the flywheel optimization was not
the focus of the research, optimum specific energy results were not given. Also, residual
stresses due to processing temperatures or manufacturing methods were not included in this
analysis.

35
2.3 Research Work: 2000s
In 2000, an article was published by Emerson and Bakis that presented concerns about
press-fit relaxation by producing a viscoelastic formulation and experimental results [28].
The formulation included a linear viscoelastic model with plane stress assumptions and
constant centrifugal loading. Residual stresses due to press-fitting were included; however,
thermal processing effects were not. Multiple flywheel rotor designs were investigated and
included three material options with aluminum, glass/epoxy, and carbon/epoxy composites.
Flywheels designs also included both high-pressure and low-pressure press-fitting for a total
of six designs. When compared to experimental results, the models were very close for
the composite-only designs. However, the designs that included an aluminum hub were
significantly under-predicting the experimental results. After hundreds of hours of testing,
pressure losses of 3-5% were measured.
In 2001, Tzeng investigated various mechanical concerns for a press-fit rotor design
subject to centrifugal and electromagnetic loading [29]. The design consisted of outer and
inner composite rings with an aluminum coil cylinder set radially between the two composite
rings. Centrifugal and electromagnetic loadings were analyzed to determine the value of
the press-fitting. The author discussed stress relaxation of the press-fit preloading over
time. The author displayed test results of press-fit relaxation at elevated temperatures
for an extend period of time. The elevated temperatures used were 93 and 75 ◦C. Last,
the author discussed how compressive stresses resulting from press-fitting can increase the
fatigue failure cycle life from shear stresses generated from the electromagnetic loading.
In another article by Ha et al., an optimum flywheel design was investigated using a Mod-
ified Generalized Plane Strain (MGPS) assumption [30]. This assumption was compared to
a plane stress assumption and 3-D FEM solutions. Also, this article incorporated residual
stresses associated with processing temperature changes. The MGPS is an expansion of the
plane strain assumption. The plane strain assumption sets the axial strains to zero. The
Generalized Plane Strain (GPS) assumption sets the axial strain to a constant as follows:

36
εz = ε0. The MGPS assumption incorporates a radially-dependent linear variation to the
axial strain as follows: εz = ε0 + ε1r. The constants were solved by requiring the axial force
and moment resultant to vanish. The limiting design was determined by the Tsia-Wu failure
criterion [25]. When compared to the 3-D FEM and plane stress assumptions, the MGPS
assumption was determined to be more accurate compared to the plane stress assumption
for axial stresses and strength ratios. The higher accuracy of the axial stress distribution
translates into a higher peak axial stress for the MGPS assumption. However, the plane
stress assumption is more conservative in determining limiting strengths. These results were
consistent in the cases of processing temperature changes that were 0 and −100 ◦C. Once
the accuracy of the MGPS assumption was confirmed, it was used to perform a case study
analysis similar to the previous paper by Ha et al. on multi-ring hoop-wound rotors [26].
However, contrary to the previous article, there was no permanent magnet rotor segment
to account for. The three material rings given were a glass fiber composite, a low-grade
carbon fiber composite, and a high-grade carbon fiber composite. The inner radius was
set to 50 mm, and the spin speed was set to 60,000 rpm. The only free variables were the
three thicknesses of the rings. To solve the optimization problem, the ”modified method
of feasible directions for constrained minimization” strategy was used with total stored en-
ergy as the objective. The best case presented with a zero processing temperature included
all three rings in a sequence relating to an increasing stiffness/density ratio as the radius
increased. The total stored energy of this case was 1141 W·h with a tip speed of 1070
m/s. For the case of residual stresses originating from a processing temperature change of
−100 ◦C, the maximum total stored energy was 794 W·h with a tip speed of 975 m/s. This
corresponded to a 30.4% reduction in energy storage capability and proves that, in certain
cases, the processing temperature changes can decrease flywheel performance significantly.
In 2002, Gowayed et al. performed a flywheel optimization design analysis for a single
ring, hub, and rotor mount [31]. The novelty of this analysis lies in the fact that both the
hub and the ring contained fibers oriented in the hoop and radial directions for a multi-

37
directional composite. Much like Miyata [19], radial and hoop plies ware stacked axially to
produce the composite. Only one ring was analyzed and the ply thicknesses were constant
throughout the radial thickness of the ring, which is shown in Figure 2.10. Two analysis
methods were used. The first included a plane stress assumption, and the second included
a FEM tool. For both cases, the Tsai-Hill failure criterion was used. The tool used to
perform the 3-D stress analysis was a package called ANSYSTM. The flywheel hub consisted
of an S-2 glass fiber/epoxy composite. The ring was constructed of a T1000 carbon/epoxy
composite. For all cases, the ring outer diameter and axial thickness were set. The variables
for all the cases were the radial location of the interface between the ring and hub, the hub
axial thickness, and the radial/hoop ply thickness ratios for both the hub and ring. The
optimization was performed based on a sequential quadratic programming procedure. For
the case that included the rotor mount, hub, and ring; a tip speed of 1211 m/s was achieved
for a specific energy of 93 W·h/kg. No residual stresses concerning processing temperature
changes or manufacturing methods were factored into this analysis.
Figure 2.10: Multi-direction composite flywheel design by Gowayed et al. [31].

38
In 2003, Emerson and Bakis published a continuation of their previous work concerning
press-fit relaxation [32]. This model is the same as previously stated [28], except that
it includes time-varying loads and residual stresses from temperature changes. Analysis
included a design without press-fitting and constant loading after manufacturing, a press-fit
design with discrete step loading and temperature changes, and a press-fit design with cyclic
loading and temperature changes. Based on this analysis, the authors predicted a decrease
in energy storage capacity of roughly 4% after 10 years, suggesting minimal viscoelastic
performance degradation effects. Nonetheless, changes in the radial strains were predicted
to be large.
In 2004, Corbin et al. presented a case study in flywheel design, manufacturing, and
testing [33]. The stress analysis tool for both the 2-D and 3-D modeling was ANSYSTM. The
flywheel used a multi-ring design with a steel shaft as the base; an elastomeric polyurethane
hub; and three rings consisting of an E-glass fiber, a low-grade carbon fiber, and a high-
grade carbon fiber. The Tsai-Wu failure criterion was used to determine flywheel limits
[25]. The flywheel had been optimized, but the method for performing this optimization
was not given. The manufacturing of the three composite rings was performed with filament
winding. The liquid polyurethane hub was cast around the steel shaft and allowed to cure.
To fit the hub and shaft onto the composite ring, the hub/shaft assembly was cooled in
a freezer and the large coefficient of thermal expansion of the polyurethane allowed the
assembly to shrink. During testing of the flywheel design, two failure modes were seen.
The first observed failure came from the hub debonding from the steel shaft. The second
occurred in the composite rings, indicating radial stress failure. The authors note that they
were not able to adequately predict the radial strengths due to uncertainties such as curing
temperature, fiber volume content, and filament winding tension. Analysis estimated the
maximum angular speed to be 7120 rad/s for a total stored energy of 30.5 W·h. No other
geometric or performance data were given.
Also in 2004, Portnov et al. performed both a theoretical formulation and numerical
39
calculations to investigate of the behavior of elastomeric interlayers [34]. In this paper, the
authors provided a formulation for the stress state of an interlayer by assuming a plane stress
state for the composite inner and outer layers, and a plane strain state for the interior regions
of the elastomeric interlayer. Formulations were generated for rotation about the axis of
symmetry, translation in the plane normal to the axis of symmetry, and rotation outside the
plane of symmetry. The latter two loading states are shown in Figure 2.11. Concerning the
symmetrical axis rotation, the proposed method of analysis was compared to typical plane
stress analysis and 3-D axisymmetric FEM analysis. The proposed formulation was shown
to be valid for radially thin interlayers at points distant from the axial ends, whereas the
plane stress formulation was more accurate as the interlayer became thicker. The proposed
formulation deviated from the FEM results in regions near the axial ends of the flywheel.
Last, it was noted that it was possible to eliminate the radial stresses imposed on the inner
edge of the outer ring by tuning the thickness of the elastomeric interlayer. No residual
stresses relating to manufacturing methods were addressed. Because the purpose of this
article was to test the accuracy of a formulation and understand elastomeric interlayer
behavior, no specific design or flywheel performance information was given.
Another paper published by Portnov et al. in 2005 discusses the prospect of varying
the filament winding tension to produce an appropriately pre-stressed flywheel that could
compete with press-fit pre-stressing [35]. Both methods generate compressive radial stresses
in the flywheel to counter the tensile radial stresses produced by centrifugal loading. The
authors constructed a formulation of plane strain similar to that by Ha et al. [30] and
used literature references and numerical calculations to verify its validity for a hybrid steel
and fiber/epoxy composite flywheel. This formulation included residual stresses relating
to processing temperature changes. It was noted that for compound cylinders using the
plane stress assumption, the radial stresses were higher and hoop stresses were lower com-
pared to the plane strain assumption. Radial stresses were 50 to 60% higher for the plane
stress cases. After this analysis, the authors move on to display the formulation for vari-

40
Figure 2.11: Cases investigated by Portnov et al. with (a) showing in-plane translation and(b) showing out-of-plane rotation [34].
able filament-winding tensioning. This formulation was based on a linear elastic material
model which completely neglected any viscoelastic effects during the filament winding pro-
cess. This formulation also neglected axial stresses and assumed there were no non-circular
deformations in the filament winding process, such as what would arise from gravitational
body forces. The authors cite a single source in the literature concerning experimental evi-
dence of the retention of linear elastic behavior being maintained throughout and after the
curing process. However, the statistical distribution for these experimental data points was
quite large. The authors further discussed the potential viability of their variable tensioning
model, especially with in situ curing, but did not provide their own experimental evidence
in this paper.
In 2006, Arvin and Bakis published a paper that investigated optimization of filament-
wound multi-ring composite flywheels that had been press-fitted together and possessed an
attached interior permanent magnet ring [36]. The formulation used was referenced from

41
Gabrys and Bakis [22], which obtained plane stress solutions from Genta and Lekhniskii
[13, 23]. The authors also incorporated residual stresses relating to processing temperature
changes. These residual stresses were tested for failures in the case of an unloaded situation
for each ring before press-fitting the rings together and in the cases of both unloaded
and centrifugally loaded situations for the entire rotor after the press-fitting procedure.
The failure criterion used was Tsai-Wu [25]. For the optimization, they used a simulated
annealing algorithm. For all cases, the three composite materials available for use were three
grades of carbon fiber. This optimization method was first tested without respect to stresses
in the individual rings prior to press-fitting. The second test set did incorporate the residual
stresses in the rings prior to press-fitting. Once the simulated annealing tests were validated
across multiple runs, the second test set incorporated a matrix of scenarios. The scenarios
included cases for four, five, six, seven, and eight rings; and stress free temperatures of 112
and 176 ◦C. A total of 10 cases were evaluated. Results showed how calculating residual
stresses for all the rings manufactured before press-fitting and the completed ring after
press-fitting can significantly lower the specific energy of the optimal design. The results
listed a potential drop of 40% from 48 to 28 W·h/kg. Results also indicated that lowering
the processing temperature reduced the number of rings needed to achieve a set specific
energy. However, as the number of rings is increased, both processing temperature cases
appeared to move toward the same specific energy upper limit. Increasing the number of
rings can compensate for higher processing temperatures. This increase would be expected
as thinner rings have lower residual stresses. Also, the number of press-fit interferences and
ring thickness parameters allow the flywheel ring to be more finely tuned and optimized.
The best case of 112 ◦C processing temperature with 8 rings, the highest specific energy
achieved was roughly 50 W·h/kg with a tip speed of 860 m/s. However, the authors felt
that a more reasonably cost-effective solution was with 5 rings for a specific energy of 46
W·h/kg and a tip speed of 840 m/s.
In 2007, Fabien performed an investigation concerning using different failure criteria

42
and a single ring that contained both hoop and radial plies stacked axially [37]. This design
optimization was highly similar to Miyata [19] except that instead of varying the radial
and hoop ply thickness, Fabien chose to vary the ply angle of the radial fiber plies. Fabien
selected a 2-D plane stress formulation. Because the ply angle was allowed to vary, the
in-plane shear stress needed to be taken into account. This is shown in Equation 2.4.
σθσrτθr
=
Qθθ Qθr Qθ6Qrθ Qrr Qr6Q6θ Q6r Q66
εθεrγθr
(2.4)
where:6: θr shear component
The alteration in the ply angle for the radial plies is shown in Figure 2.12. It is again
noted that the ply angle alteration concerns the radial plies only, with the hoop plies having
all the fibers oriented strictly in the hoop direction. For the analysis, the radial ply was
discretized into a series of small rings stacked together. Each thin ring has its own ply
angle and corresponding stiffness matrix. For this analysis, three different failure criteria
were used to compare to each other: maximum stress, maximum strain, and Tsai-Wu [25].
For all cases, the inner radius was set to 25.4 mm and the outer radius to 168.9 mm. Four
designs were generated for comparison of the three failure criteria. The first design set all
the radial fibers strictly in the radial direction and served as a benchmark for the optimized
designs. The second, third, and fourth designs were optimized based on each of the three
failure criteria. The optimization method for these three designs included using sequential
quadratic programming.
For the results, all four designs were tested against each of the failure criteria for specific
energy. Although the maximum stress and strain cases possessed different design results,
they produced identical specific energy results. The result for these cases was 168 W·h/kg.
The most conservative case was based using the Tsai-Wu failure criterion for a specific
energy of 156 W·h/kg. No velocity information was given in this article. The author

43
Figure 2.12: Example of varying the ply angle for the radial plies of the single ring flywheel[37]. Hoop plies are not shown.
acknowledges the manufacturing difficulty entailed with trying to vary the radial ply angle
in a nearly continuous manner. For this analysis, residual stresses relating to manufacturing
were not included.
Also in the same year, Strasik et al. published results on constructing a complete
flywheel energy storage system [38]. For this experiment, the flywheel rotor consisted of
four carbon/epoxy composite rings with three elastomeric interlayers. The entire system
had an energy storage capacity of 5 kW·h. The hub and rotor weighed 164 kg for a specific
energy of 30.5 W·h/kg with the hub included. No geometrical information was included,
but angular speeds of 2480 rad/s were experimentally achieved. This flywheel system also
included a high-temperature superconducting bearing to levitate the flywheel.
In 2008, Arslan analyzed to isotropic flywheel designs by performing FEM analysis on

44
variations of the iso-stress disk in order to explore other geometries [39]. Cases investigated
vary the geometry of an AISI 1006 steel alloy disk. Geometries included 6 cases with a con-
stant thickness disk, constant thickness ring, parabolic tapering, linear tapering, truncated
iso-stress exponential decay tapering, and a modified iso-stress case. The last case truncates
the iso-stress case, however, it places a small torus at the end of the taper to increase the
specific energy and develop a radial stress at the end of the taper. As expected, the constant
thickness ring was the worst performer. The highest performer was the modified iso-stress
profile with a specific energy of 8.977 W·h/kg, which was 48.7% higher than the constant
thickness disk.
In the same year, Ha et al. investigated how geometric scaling of flywheels affects
the energy storage capability, press-fit interferences, and rotational speed [40]. For all
cases, the curing temperature remained the same. A plane stress formulation was used.
The geometric scaling was made such that the specific energy was kept constant. Two
flywheels were investigated. The first flywheel was a double ring that had an inner layer
of a glass/epoxy composite and an outer layer of carbon/epoxy composite. The second
flywheel consisted of four composite rings: two inner rings made of glass/epoxy, two outer
rings made of carbon/epoxy. The double ring held a specific energy 64.8 W·h/kg with a
tip speed of 890 m/s, and the quadruple ring had 81.2 W·h/kg with a tip speed of 1013
m/s. The authors developed special scaling factors that increased to the cubic power of the
energy storage capacity. Press-fits were determined to scale linearly, and rotational speed
scaled inversely with the factors. Two flywheels of the double ring design were made to
report the manufacturing requirements of these designs.
Also in the same year, Ha et al. published an analysis similar to that of Arvin and Bakis
[36] concerning the residual stresses due to processing temperature changes and stress states
before and after press-fitting but before centrifugal loading [41]. A plane stress formulation
was used as was the the Tsai-Wu failure criterion [25]. For all analyzed cases, the goal was
to maximize the specific energy of the flywheels. Also, the inner radius constraint was set to

45
100 mm with the outer radius allowed to vary to maximize specific energy, but a maximum
angular speed limit was set to 30 krpm. For each design, two processing temperature change
cases of 0 and −50 ◦C were analyzed. Multiple cases were analyzed with up to five rings
used with the number of glass and carbon/epoxy composite rings varied. In all cases, the
glass/epoxy composite rings were placed inside the carbon/epoxy composite rings. For all
cases, the processing temperature change of −50 ◦C was only slightly inferior to the 0 ◦C
change. This change was displayed for the optimal case of two glass/epoxy inner rings and
three outer carbon/epoxy rings. The 0 ◦C case gave a specific energy of 131.0 W·h/kg with
a tip speed of 1372 m/s, and the −50 ◦C case gave a specific energy of 130.7 W·h/kg with
a tip speed of 1370 m/s. After this, the authors discuss the press-fitting procedure for two
flywheels of 0.5 and 5.0 kW·h.
2.4 Research Work: 2010 To The Present
In 2010, Krack et al. published an investigation into energy/cost optimization of a rotor
with two material rings [42]. The inner ring material was set to a glass/epoxy composite
with a carbon/epoxy composite for the outer ring. The inner radius of the rotor was set to
120 mm and the outer radius was set to 240 mm. A press-fit interference of 0.5 mm was set
in between the material rings. The only two variables in this optimization search were the
middle radius of the interface between the two material rings and the rotational speed. This
highly constrained problem included a plane stress formulation highly similar to Ha et al.
[24], which was verified by the FEM package ANSYSTM. The maximum stress, maximum
strain, and Tsai-Wu failure criteria were used individually and separately. To analyze the
cost of the flywheel rotor, a cost ratio between the carbon/epoxy and glass/epoxy was
created. This ratio was multiplied by the mass of the carbon material as a weighting
factor. This ratio was manually varied from zero to an arbitrarily high number such that
optimized behavior could be observed as this ratio is changed. For the optimization, the
Coliny evolutionary algorithm was employed along with a nonlinear interior-point method

46
to produce a more robust optimization search. It is important to note that only the material
cost of the rotor was analyzed. Manufacturing costs for the rotor as well as material and
manufacturing costs for the auxiliary flywheel system components were not included. The
authors were able to show that there were step jumps/drops in the optimized solutions as
this ratio was changed, with four distinct regions found. The author claim that highest
specific energy for the best cost ratio range was 2.48 kW·h/kg with a total stored energy of
3.46kW·h and angular speed of 804 rad/s. Because the specific energy was roughly a factor
of ten higher than that found in other research results, it is considered to be in error.
In the same year, Lin et al. published an article proposing that incorporating carbon
nanotubes into the epoxy matrix of a carbon/epoxy composite could increase the per-
formance of flywheels [43]. After a basic theoretical analysis was performed for various
materials, the authors used FEM analysis to show that the stress distribution of a centrifu-
gally loaded flywheel ring can benefit from incorporating carbon nanotubes in a functional
gradient. This gradient would serve to stiffen the matrix where it was needed most. The
authors did not provide any further theoretical analysis of how significant the performance
improvement would be. The authors also did not explain how such a gradient could be
physically produced.
In 2011, Prez-Aparicio and Ripoll produced a theoretical formulation that included
physical effects such as residual stresses from temperature and moisture changes as well as
shear stresses from rotational acceleration [44]. The full accounting of these effects is shown
in Equation 2.5.
εθεrεzγθr
=
Sθθ Sθr Sθz 0Srθ Srr Srz 0Szθ Szr Szz 00 0 0 S66
σθσrσzτθr
+
αθαrαz0
∆T +
βθβrβz0
∆C (2.5)
where:Sij : Element of the compliance matrix∆T : Temperature change

47
∆C: Moisture changeα: Coefficient of thermal expansionβ: Coefficient of moisture expansion
These relations serve as a basis for both the plane stress and plane strain formulation,
where the simplifying assumptions were incorporated later into the analysis as numerical
factors that could be changed to suit the assumptions without needing to change the under-
lying equations. The article discussed the need for factoring in shear stresses to account for
energy transfer. The article extended the discussion into the benefits of producing a gra-
dient cure temperature and moisture saturation in order to improve flywheel performance.
No manufacturing details of how these benefits could be achieved were discussed. Also there
was no accounting for the fact that high speed composite flywheels need to operate in a
vacuum, where no moisture is present. Last, hub effects were lightly investigated, displaying
the benefits of using an elastomeric urethane hub to mitigate interface stresses.
Also in 2011, Krack et al. expanded on their previous research to include a hub in
their cost optimization analysis [45]. The included hub was of a split-type design previously
investigated by Ha et al. [46]. This hub design is shown in Figure 2.13. In this analysis, the
authors compared and contrasted the performance of combining the analytic and numerical
calculations using different methodologies to minimize computational time. The authors
determined that the surrogate strategy tested was the most efficacious. Once this method
had been determined, four additional analyses were performed, which were divided into two
sets. The first set included an optimization search that was nearly identical to that of the
2010 article except that the cost ratio was set to 4, no press-fit interferences were used, and a
solid hub was included with a set thickness of 10 mm. Both the split type and solid ring hub
designs were compared with that of a no-hub scenario. The peak energy/cost ratio for the
solid ring hub was 80.3% of the no-hub scenario, and the peak ratio for the split-type hub
was 99.7%. Two additional cases were made where the hub thickness was allowed to vary.
When this variation was allowed, the solid ring case produced a vanishing hub thickness,

48
and the split-type hub produced a hub thickness of 3.80 mm for an energy/cost ratio that
was 103.7% of the no-hub scenario, indicating a slight improvement when using this hub
design. It is important to note that the energy/cost analysis included neither the added
kinetic energy nor the manufacturing/material cost of the hub. The purpose of the hub was
strictly to change the stress distribution of the rotor, thus changing the energy/cost of the
rotor itself.
Figure 2.13: Split-type hub design first investigated by Ha et al. [46], then by Krack et al.[45].
In 2012, Ha et al. presented research concerning their investigation of combining fiber
co-mingling, where two or more fibers are used at the same time for one material ring,
and press-fitting [47]. The three cases that were presented are shown in Figure 2.14. As
is shown, the innermost material rings of the cases have mainly glass fibers, transitioning
to mostly carbon fiber content in the outermost ring. In these cases, the inner and outer
radii of the rotors were fixed at 0.27 and 0.45 m. The three radii in between the inner and
outer rotor radii were variables in an optimization search. The carbon/glass fiber ratios of
the four material rings were also variables in the optimization search. Last, for the cases
that include press-fitting, the interferences were also variables. In the stress analysis, a
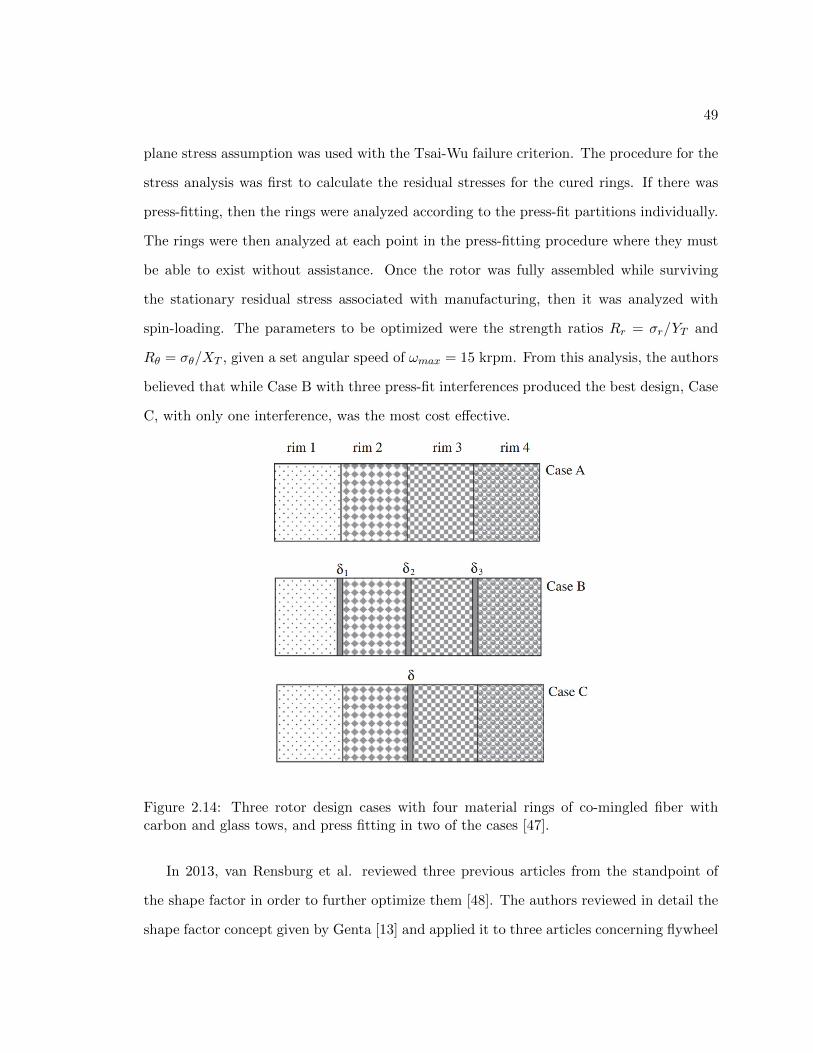
49
plane stress assumption was used with the Tsai-Wu failure criterion. The procedure for the
stress analysis was first to calculate the residual stresses for the cured rings. If there was
press-fitting, then the rings were analyzed according to the press-fit partitions individually.
The rings were then analyzed at each point in the press-fitting procedure where they must
be able to exist without assistance. Once the rotor was fully assembled while surviving
the stationary residual stress associated with manufacturing, then it was analyzed with
spin-loading. The parameters to be optimized were the strength ratios Rr = σr/YT and
Rθ = σθ/XT , given a set angular speed of ωmax = 15 krpm. From this analysis, the authors
believed that while Case B with three press-fit interferences produced the best design, Case
C, with only one interference, was the most cost effective.
Figure 2.14: Three rotor design cases with four material rings of co-mingled fiber withcarbon and glass tows, and press fitting in two of the cases [47].
In 2013, van Rensburg et al. reviewed three previous articles from the standpoint of
the shape factor in order to further optimize them [48]. The authors reviewed in detail the
shape factor concept given by Genta [13] and applied it to three articles concerning flywheel
50
rotor optimization. These articles were Krack et al. [42], Arvin and Bakis [36], and Ha et
al. [30]. The authors believed that using the shape factor in a multi-ring composite rotor
could help in increasing the specific energy of the rotor. The shape factor for these articles
were calculated to be 0.39, 0.22, and 0.18; all of which were much lower that the theoretical
limit of 0.5 for a composite hoop-wound rotor. The authors then attempted to reanalyze the
rotors according to this criterion. Only two-ring rotors were analyzed with the plane stress
assumption and the Tsai-Wu failure criterion. It is not clear what optimization method was
used although particle swarm and genetic algorithms were mentioned. The only variables
in the optimization were the overall thickness ratio of the rotor λ, the radial locations of the
interfaces for the material rings within the rotor, and the angular speed. The authors showed
improvements in all three cases; however, the authors did not analyze the rotor in a manner
similar to that of the previous authors. Krack et al. performed a cost optimization, not a
specific energy or energy density optimization [42]. Arvin and Bakis analyzed their rotor
with respect to inner magnetic material for power transmission, which was not included in
this analysis [36]. Last, Ha et al. chose to optimize on total stored energy. In performing
this analysis, the authors believed that enclosed volume energy density was a more preferred
optimization objective than specific energy.
2.5 Summary
As has been listed in the referenced work, there are many avenues and options for improving
the performance of flywheels. Early research focused on producing optimized solutions by
using formulations that provided purely analytic optimization results. The analytic results
required that the flywheels have certain properties that continuously vary based on location.
Some more recent work also investigated the continuous variation of flywheel properties
to optimize performance, but did not provide a strictly analytic formulation result to do
so. Later work expresses greater interest in a more discrete approach to optimization
with multi-ring flywheels or suggested a discretized change in properties to reflect a more

51
easily producible rotor design. Later work also expressed an interest in using more complex
optimization tools such as sequential linear and quadratic programming, genetic algorithms,
and simulated annealing. Throughout the entire research history, case studies have been
performed to analyze, manufacture, and test flywheel designs and ideas. With this research
work, a few different optimization goals have been presented. By far, the optimization
parameter of greatest interest has been specific energy. However, other parameters such as
the total stored energy, usable stored energy, energy per unit cost, and energy density have
been used.
Given all of these options and possibilities, there is a clear need to narrow the research
range to the most relevant analyses. Theoretically optimized solutions for rotors with con-
tinuously varying material or geometric properties can serve as benchmarks against new
composite design ideas. However, manufacturing difficulties associated with continuously
varying the flywheel properties can make these designs highly uneconomical. Discrete vari-
ation (multi-ring rotors) is preferred from a manufacturing standpoint, but there are many
options for discrete changes such as density, press-fit stresses, material selections, elas-
tomeric interlayers, and fiber selection and orientation.
What optimization objective and constraints should be used to ensure the analysis
results most closely match the needs of a consumer of this technology? Which combination
of design options allows the highest performance given the ease of manufacturing associated
with those design options? What search methods/tools should be used to determine this
optimal design? Last, what is the most realistic way to model these designs? These are
issues and questions worthy of investigation in order to define an appropriate research path.
The next chapter presents a discussion and underlying relevant approach to be used in
improving the performance of flywheels.

Chapter 3
Objectives
With all of the possible flywheel rotor model formulations and design options, it is important
to clearly define the objectives of this research to advance technological understanding in
both regards. It was the original goal of this research to only focus on five multi-ring
composite flywheel rotor design options. However, upon investigating the methodology
for constructing the optimization problem, this author found it necessary to also pursue
research identifying useful, independent objective and geometric constraint combinations.
3.1 Phase I: Objective/Constraint Investigation
In the preceding publications reviewed, several optimization objectives were established:
total stored energy K, specific energy Km, material volume energy density Kmv, enclosed
volume energy density Kev, and energy per unit cost. Since attempting to characterize both
material and manufacturing costs of the flywheel rotor and auxiliary system components is
a highly complex endeavor that requires substantial economic data and is subject to large
variations depending on technology application and environmental factors, energy per unit
cost is excluded from this investigation. However, when including simplifying assumptions
and restrictions, the other options become feasible to analyze. The first simplifying factor
is the 2-D plane stress assumption. The second factor is an axisymmetric rotor design
52

53
restriction. The third is the exclusion of shear stresses associated with power-transferring
torques and bearing-to-rotor gravitational loadings. The fourth is the restriction to polar
orthotropic materials where the fibers are oriented in either the hoop or radial directions.
The fifth is the exclusion of a hub. This fifth factor is required because realistic hubs are
often neither axisymmetric nor 2-D in their design. With these factors, the objectives to be
investigated are K, Km, Kmv, and Kev. With these objectives selected, the next issues to
address are the geometric constraints.
When making an accounting of all the variables that are included with the flywheel
design, an issue arises as to how to handle the rotor radii. Should the outer rotor radius
be fixed, or should it be allowed to vary? Should the inner rotor radius be fixed, or should
it be allowed to vary? Is it reasonable to allow both inner and outer rotor radii to vary?
These questions are multiplied for each objective to produce an objective/constraint decision
matrix, which is shown in Table 3.1.
Table 3.1: Optimization objective validity and equivalency for different radial constraintcombinations.
(A) (B) (C) (D)
Fixed RadiiFixed Inner Fixed Outer Constraint-
Radius Radius Free Radii
1. Total Stored? ? ? ?
Energy K
2. Encl. Vol. Energy? ? ? ?
Density Kev
3. Mat. Vol. Energy? ? ? ?
Density Kmv
4. Specific? ? ? ?
Energy Km
This table summarizes the first major goal of this research: identify all valid and in-
dependent objective/constraint combinations as well as any combination that is not valid
or useful through equivalencies, non-physical limiting behavior, or unbounded optimization

54
behavior. In doing so, it is possible to summarize the information and complete Table 3.1.
Note that this table contains numbers corresponding to the objectives and capital letters
corresponding to the geometric constraints. This table is designed to act as a code for future
use. An example would that 2–C would correspond to enclosed volume energy density with
a fixed outer radius. This portion of the research will be denoted as Phase I. Only when
this portion is finished and the valid objective/constraint combinations have be selected for
use can the second phase begin.
3.2 Phase II: Design Option Investigation
There are five design options to be investigated in a portion of the research denoted as
Phase II. A notational overview of the options is given in Figure 3.1 and a description is
provided below:
Figure 3.1: Illustrative description of the five rotor design options to be investigated.
(A) Variable Fiber/Matrix Option: allowing the the fiber/matrix ratio of each material
ring in the multi-ring composite rotor to each vary.
(B) Radial/Hoop Fiber Option: allowing variable proportions of radial and hoop fibers in

55
each material ring.
(C) Two-Fiber Co-mingling Option: combining two fiber materials in a variable ratio in
each material ring.
(D) Press-fitting Option: taking the material rings and press-fitting them together with
set overlapping interferences to produce compressive radial stress in each material
ring.
(E) Matrix Ballasting Option: infiltrating the composite matrix with high-density parti-
cles to vary density, stiffness, and coefficient of thermal expansion within the matrix
of each material ring.
These options are investigated individually and in combination with each other and
compared with the zero design option scenario. All of these combinations are investigated
with respect to the valid, independent objective/constraint combinations identified in Phase
I. Phase I allows for the comparison of design options with the objective/constraint combi-
nations.
3.3 Summary
The first goal is to characterize many popular objective/constraint combinations in terms
of their validity and usefulness. With these combinations identified, the design options
are investigated to characterize their potential to benefit or hinder the optimization of the
desired objective. All this information can be highly useful to flywheel rotor designers to
better understand how they can avoid pitfalls and trivial optimization traps in setting up
their optimization search. It also can direct them to either further investigate or avoid the
design options investigated here.
Chapter 4
Methodology
This chapter describes the structure of the two investigative phases outlined in the previous
chapter. It goes into the assumptions, constraints, and formulations necessary to perform
the research. It also describes the tools and techniques used to generate the results, such
as the computer codes written. Subsequently, it goes into detail in sequence of calculations
made and how the optimization algorithms work.
4.1 Phase I: Objective/Constraint Investigation
In a number of the objective/constraint combinations given in Table 3.1, simple, straight-
forward dimensional analysis can be performed to identify equivalencies in the optimization
goals. As a result of this fact, these simple degenerate combinations are analyzed first. Four
of the sixteen cases are analyzed using this method. There are two cases that require only
analysis from the single ring rotor program. Since this analysis is slightly more complex
than the previous four combinations, it is presented next. One combination requires the
multiple ring rotor optimization program to demonstrate its conditional validity and is pre-
sented as the seventh case. Three cases concerning specific energy Km require use of both
the multiple ring rotor program and the single ring rotor program to robustly investigate
and validate the issues regarding their result. Three cases concerning the material volume
56

57
energy density Kmv largely mimic the cases concerning specific energy with some notable
exceptions. Last the remaining cases are considered valid and are used in the Phase II
investigation with the design options.
It is important to note that, in most cases, definitive proofs are not made. Closed-
form analytic solution are intractable if not impossible to produce. The reason for this
intractability can be provided by counting the number of search dimensions for a 3-ring
problem with all the design options checked: 27-D search space. Other factors that could
change results include the following:
• Changing the material properties/models
• Changing from a 2-D plane stress analysis to another formulation such as a 2-D planestrain, 2-D MGPS, 3-D FEM, etc.
• Including a designed hub that may not be 2-D or axisymmetric
• Adding other design options such as fiber pretensioning, axial thickness variation,orienting fibers more toward the axial direction, etc.
• Introducing design-specific constraints not listed here
Therefore, these results are only presented as a guide for flywheel rotor designers to
assist them in choosing how they want to construct their rotor optimization problem. For
the objective/constraint combinations where the multiple ring program is used, plot lines
are shown to demonstrate the behavior of using (1) none of the design options, (2) each of
the five options individually, (3) four of the design options grouped together, (4) and then
all five design options grouped together for a total of eight lines. Each line contains three
data points corresponding to one, two, and three material ring rotors.
When using the multiple ring rotor program, a many of optimization runs made pro-
duced results that indicate non-physical behavior. For the conditionally valid objective/
constraint combination 1–B; 35,000 optimization runs were made for each data point shown
in Table D.2. For the convergence criteria to be satisfied, the best ten results for each data
point must be identical to within 3 significant figures. If not, the best value is used and
the corresponding data point given in Table D.2 is shaded gray. For combinations 3–C and

58
4–C, 30,000 runs were made for the design results shown, and all of those results converged
to satisfaction.
4.2 Phase II: Design Option Investigation
The design option investigation only includes results from the three valid objective/constraint
combinations: total stored energy, fixed radii; total stored energy, fixed outer radius; and
specific energy, fixed radii. There are a total of 32 design option combinations which are
shown as four independent graphs as listed in Table 4.1. In all of these cases, the residual
stresses due to an epoxy cure cooling temperature change of ∆T = −110 ◦C was applied to
the stress analysis. Each design option is measured with three ring options of one, two, and
three material rings per rotor. This results in a total of 288 plot points.
Table 4.1: Design option combinations investigated for a given objective/constraint combi-nation.
Graph 1 Graph 2 Graph 3 Graph 4
0 AB ABC ABCDE
A AC ABD ABCD
B AD ABE ABCE
C AE ACD ABDE
D BC ACE ACDE
E BD ADE BCDE
BE BCD
CD BCE
CE BDE
DE CDE
Each design option adds to the number of search space dimensions that already exist.
Since there can be multiple rings, the number of added search space dimensions is subject
to change. The list below identifies all of these search dimensions that include and exclude
the design options. In this list, N is the number of materials rings in the flywheel rotor.
• Default Search Space Dimensions

59
◦ N or N − 1 ring radii selections depending on if one or both rotor radii are fixed
◦ N Fiber #1 material selections
◦ 1 Angular speed selection
• A: Variable Fiber/Matrix Option
◦ N fiber-matrix ratios
• B: Radial/Hoop Fiber Option
◦ N radial-to-hoop fiber ratios
• C: Two-Fiber Co-mingling Option
◦ N Fiber #2 material selections
◦ N (Fiber #1 / Fiber #2) ratios
• D: Press-fitting Option
◦ N − 1 press-fit interferences
• E: Matrix Ballasting Option
◦ N ballast material selections
◦ N particle-to-matrix volume ratios
As can be seen, the number of search space dimensions is highly variable depending
on both the number of material rings and design option combinations. The most simple
case would be a single material ring rotor with none of the options selected and both rotor
radii fixed. This situation would correspond to a 2-D search space associated with the
composite material selection and the peak angular speed allowed. The most complex case
would include fixing only one radii while incorporating three material rings with all five
design options. This situation would correspond to a 27-D search space.
For the completely valid objective constraint conditions 1–A, 1–C, and 4–A; 75,000
optimization runs were made for each data point. For the convergence criteria to be satisfied,
the best ten results for each data point must be identical to within 3 significant figures. If
not, the best value is used and each corresponding data point that failed to converge given
in Tables D.1, D.3, and D.4 is shaded gray.

60
4.3 Single Ring Rotor Program
The analysis performed here is highly similar to that of Gabrys & Bakis [22], which is based
on that of Genta [13] and Lekhnitskii [23]. This formulation is based on the plane stress
assumption for an axisymmetric, uniform-thickness ring geometry with polar orthotropic
materials in the form of hoop-wound fiber composite materials. This formulation is given
in Section A.1. With this information and formulation, it is possible to develop a search
algorithm to determine the optimum inner radius for a set of assigned material, bound-
ary stresses, and outer radius conditions with an optimization objective chosen. Both the
straight forward calculations and the optimized results are produced. For this analysis, two
popular hoop-wound composite materials are chosen: E-glass/epoxy and high strength car-
bon/epoxy. The formulation and calculation procedure are listed in Section A.1. Properties
of the unidirectionally reinforced hoop-wound composites are listed in Table B.1.
With these equations, it is a simple matter to calculate the corresponding maximum
K, Kmv, Kev, and Km for a given rim material, inner and outer radii, and inner and
outer boundary stresses. With this information and formulation, it is possible to develop
a search algorithm to determine the optimum inner radius for a set of assigned material,
boundary stresses, and outer radius conditions with an optimization objective chosen by
simply scanning the 1-D angular speed variable until the peak is found. Graphs are produced
to demonstrate this as necessary. Both the straight forward calculations and the optimized
results are produced.
To validate the single ring rotor program and analysis, each major calculation step
made by the single ring program code was verified by an identical calculation made in the
numerical analysis package Maxima. Also, the stress distributions and objective calculations
were verified by comparing them to the multiple ring rotor program, which uses a different
stress formulation as given in Section A.2. These calculations were also plotted to look for
any unusual or non-physical behavior.

61
4.4 Multiple Ring Rotor Optimization Program
In this section, all aspects of the multiple ring rotor program are discussed. First, the an-
alytic thermo-elastic formulation is presented with all accompanying approximations and
simplifications. Also, the composite material models are presented along with the accom-
panying material model database. This database includes composite, matrix, and ballast
material properties. Next, an overview of the optimization algorithm used is provided
along with justification of its use over other optimization algorithms. The penalty factors
are listed and explanation of how they affect search space boundary behavior is provided.
Last, an outline of the program is given along with a flowchart of that illustrates how the
objective calculation is made.
4.4.1 Analytic Formulation & Material Models
The full formulation information is given in Section A.2. This formulation is different from
the single ring formulation due to the fact that design option (B) requires individual ply
stress calculations, which require strain information. This fact is indicated in Section A.2.1.
Also, using two different formulations allowed for more robust program cross-checking. It
uses a 2-D plane stress assumption [23, 22, 49]. This assumption is used due to the fact
that it produces a more conservative approximation for the radial stresses [30]. Also, no
shear stresses relating to power transferring torques or hub-rotor gravitational shear loading
are calculated. It is well known that a superposition of these shear stress fields under the
plane stress and axisymmetric assumptions can affect certain 3-D interactive stress failure
criteria. However, because the power transferring torques and the axial length effects of
the hub or rotor are not the subject of this investigation, they are not included. This
formulation assumes only thermo-elastic behavior. No moisture strains are included due to
the flywheel being made in factory-controlled conditions while being forced to operate in a
vacuum to avoid aerodynamic drag losses. Last, neither a flywheel hub nor its boundary
stresses are included in this analysis. This is due to the fact that hubs are typically neither

62
axisymmetric nor 2-D in their design and the inner boundary stresses imposed on the rotor
reflect this. After the formulation is presented, Subsection A.2.1 contains the calculation
procedure performed by the program.
Concerning the calculation of the material properties, the stock composite, accompa-
nying epoxy, and ballast material database information given in Appendix B is used. The
basic micromechanical model property factors are first back calculated from this material
database. Once these volume-fraction-independent factors are calculated, then the actual
material properties are calculated. If the matrix ballasting design option (E) is used, then
the epoxy/ballast material property calculations are made. Assigned fiber volume fractions
of 65% are used if the variable fiber/matrix design option (A) is not used. If (A) is used,
the the optimization algorithm defines the fiber/matrix ratio to be used. If the fiber co-
mingling design option (C) is used, then the default material properties are modified to
include the additional fiber material in the composite. Last, if there are radial fibers as well
as hoop fibers for design option (B), then multi-ply composite properties are calculated as
well. Equations for these material models are given in Appendix C. All of the models used
are referenced from books by Daniel & Ishai [25], Christensen [50], and Tsai & Hahn [51],
as well as an article by Christensen [52].
4.4.2 Optimization Algorithm
As given in the literature, there are many optimization methods used. These include sequen-
tial linear and quadratic programming, simulated annealing, and various genetic algorithms.
For the highly complex search space where the most complicated test case has 27 degrees
of freedom, a robust and efficient search algorithm is required. The sequential program-
ming techniques are acceptable for a search space that is not multi-modal, or many-peaked.
These algorithms climb the optimization hill on which they are placed and will not attempt
to robustly search for other peak solutions. Such algorithms are not suited to highly multi-
modal or deceptive search spaces. An example of both characteristics is given with the 2-D

63
Schwefel test function that is shown in Figure 4.1. Simulated annealing is an optimization
algorithm where the members of the search population do not attempt to learn from each
other. It is possible that the various genetic algorithms presented can search for the optimal
solution in a robust and efficient fashion; however, the effort needed to properly tune all of
the possible algorithm parameters is beyond the scope of the proposed research. Therefore,
what is needed is an algorithm that is capable of providing a robust search with a minimum
number of search parameters to be tuned.
Figure 4.1: The Schwefel test function in two dimensions. This test function is multi-modalwith a deceptive optimum at the corner of the search space.
With these issues in mind, an investigation into a number of different evolutionary
strategies and algorithms were conducted. The more notable ones include the following:
• Particle Swarm Optimization (PSO) [53]

64
• Differential Evolution (DE) [54]
• Compact Genetic Algorithm (cGA) [55, 56]
• Generalized Generation Gap Parent-centric recombination Genetic Algorithm (G3-PCX GA) [57]
• Covariant Matrix Adaptation – Evolutionary Strategy (CMA–ES) [58]
Of all the options presented, the most promising is the CMA-ES algorithm. This strategy
reduces the number of parameters to manipulate down to the optional population size. All
other parameters that would normally need to be tuned by other algorithms are self-tuning
for CMA-ES. It is also a robust algorithm that has been compared to others with favorable
results [57, 59, 60, 61]. It has been determined to be a suitable algorithm for the purposes of
this research. The only parameter truly required to be set for this algorithm is the limit on
the number of functional evaluations. CMA-ES works by taking sample distribution results
and learning from them by adapting a displacement vector and covariance matrix to move,
scale, shape, and orient a new statistical distribution. These steps are shown in Figure
4.2. As can be seen in the figure, a default symmetrical statistical distribution is generated
and sample points calculated. Next, the best points are used to move, scale, shape, and
orient a new covariance matrix. With the new search location and statistical distribution
information acquired, a new set of sample points can be generated.
Figure 4.2: An illustration of how the CMA-ES uses a displacement vector and covariancematrix to move, scale, shape, and orient the next generation statistical distribution [62].
Other notable features in this algorithm include covariance matrix history weighting
and step size control. It is important that the new covariance matrix constructed does

65
not forget what came before it by only relying on the new population information. Often,
the previous generation’s covariance information is still useful. Therefore, the algorithm
incorporates weighted covariance history information that also helps to create the new
matrix. This history weighting provides search inertia so that unreasonable leaps and
jumps do not occur. The step size control is needed to scale the length of the displacement
vector such that it is appropriate for efficient search. An example of picking the appropriate
step size is shown in Figure 4.3. Further details on the algorithm is provided in the tutorial
produced by its co-creator as well as the first publication to outline its design [62, 58].
Figure 4.3: Step size control illustration showing a step size that is too large (left), toosmall (right), and appropriate (middle) [62].
4.4.3 Penalty Factors
The chosen optimization algorithm includes many self-parameterizing mechanisms. How-
ever, it does not account for the search behavior at the boundaries of the search space.
For all places in the search space, the algorithm needs to know where to go. If there is
a stress failure, or other constraint that limits the objective, simply setting the objective
to zero in all limiting cases does not inform the algorithm where to go. Therefore, it is
necessary to inform the algorithm that this space leads to unnacceptable results while also
informing it where to go in order to avoid/leave this part of the search space. The first of

66
these mechanisms is called the soft penalty factor. This factor is calculated according to
Equation 4.1.
Psoft = exp
(−fsoft
∣∣∣∣x− xoxo
∣∣∣∣) (4.1)
where:Psoft: Individual variable soft penaltyfsoft: Exponential decay soft penalty factorx: Constraint parameter of interestxo: Constraint parameter limit
With this equation, the full objective calculations are made, then the exponential decay
penalty is applied. If there are multiple penalties for multiple constraints, then they are
multiplied together with the objective. In trying to find the right exponential decay factor,
a great deal of testing has been performed. If the factor is too aggressive, the objective may
return zero due to a numerical precision limit and no information is obtained. In this case,
the valid search space is not found. If the factor is too lenient, the constraint limits may
be overshot and non-valid spaces might be searched. The soft penalty factor was chosen to
be fsoft = 25. In addition to the stress failure constraint, this soft penalty equation is used
for the following non-stress related constraints:
Valid ring thickness: [0.5mm,∞]
Valid press-fit ring thickness: [5% · ri,∞]
Valid ballast fraction: [0, 0.25]
Valid fiber fraction: [0.05, 0.65]
Valid press-fit interference:
[0, 0.2% · ri + ro
2
]
Note that the soft penalty corresponds to impossible or reasonable limits, but attempting
the objective calculation does not break the code. The constraints relating to stress failure

67
are applied according to Equation 4.1. For the multiple ring program, both the maximum
stress and 2-D Tsai-Wu failure criteria are applied. Whichever is the most conservative
(limiting) is used in the stress-failure soft penalty. Concerning the stress-failure calculation,
a number of scenarios are analyzed depending on the design options.
In designing a flywheel rotor, it is important to factor in manufacturing and environmen-
tal concerns. For a flywheel system, the following situations must be tested for a multi-ring
flywheel:
• Manufactured rotor, temperature change due to cooling, no load
• Manufactured rotor, temperature change due to cooling, maximum spin load
A temperature change relative to manufacturing temperatures must be included to de-
termine residual stress restrictions. Therefore, the limiting case of a nominal environmental
temperature change is used. For press-fit interferences, additional manufacturing situations
must be taken into account:
• Individual rotor ring, temperature change due to cooling, no load
Before press-fitting of multiple material rings can be made, it is necessary to construct
the individual rings first, then allow them to cure and cool down [36]. Only then can
press-fitting be attempted. However, if one of these individual rings should fail before press
fitting, then the rotor has failed before it could even be constructed and therefore should not
be considered manufacturable and should not be a valid flywheel rotor design. Therefore,
stress distributions are calculated at each of these stages to ensure manufacturability as
well as performance.
In calculating the boundary penalties, there is a second mechanism which bypasses the
objective calculation altogether. The reason for this is that if the variables were allowed
to represent such unrealistic values, their introduction may break the code. These values

68
include negative ring thicknesses, volume fractions less than zero or greater than one, or
negative interferences (producing a gap instead of an overlap). The variables that must
stay within the hard penalty range are given below:
Valid ring thickness: [0,∞]
Valid ballast fraction: [0, 1]
Valid fiber fraction: [0, 1]
Valid hoop ply fraction: [0, 1]
Valid press-fit interference: [0,∞]
When these hard penalty boundaries are exceeded, a negative linear difference is calculated
for each objective variable. This simple difference for one variable is shown in Equation 4.2.
Phard = − |x− xo| (4.2)
where:Phard: Individual variable hard penalty
Using this method of hard penalty calculation, the algorithm is always pointed toward a
valid region of the search space. This is shown in Figure 4.4 for one search dimension. With
these penalties determined, the calculation procedure for the objective is given in Figure
4.5.
4.4.4 Program Structure
An outline for the structure of the multiple ring computer program that was written is
provided here. It includes all of the major subroutine and do-loops associated with the
relevant calculation procedures of the program. After each listing, a description of the
subroutine is given.

69
Figure 4.4: Graphical illustration of hard and soft penalty factors applied in one dimension.
• Preliminary Calculations: Calculates preliminary material property informationfrom Appendix B
• Case Do Loop: Performs the required number of optimization search runs for eachcase
◦ CMA-ES Run: Samples search space by either calling the Function Evalua-tion subroutine or making a fake hard penalty calculation for each sample point;and then moves, scales, shapes, and orients the distribution using a calculateddisplacement vector and covariance matrix
— Function Evaluation: Performs a functional evaluation of the objectiveparameter based on sample variables and penalty factor weighting
∗ Composite Material Calculation: Calculates the material propertiesfor each ring
· Ballast Material Calculation: Calculates the ballasted matrix ma-terial
· Fiber/Matrix Calculation: Calculates changes in the single-fiberunidirectional material properties due to volume fraction changes
· Fiber Co-mingling Calculation: Calculates the material propertiesfor the situation of using two fibers in the composite material
· Stiffness Matrix Calculation: Calculates the stiffness matrices andthermal expansion coefficient vectors based on hoop and possibly ra-dial fiber plies

70
Figure 4.5: Flowchart of decision and calculation procedure when incorporating penaltiesinto the objective calculation.
∗ Stress Calculation: Calculates the stress vectors for speed loaded,unloaded, and possibly unloaded individual material rings if there ispress-fitting
∗ Stress Failure Calculation: Calculates the stress failure criteria tofind worst case for rotor
∗ Penalty Calculations: Calculates and combines all soft penalty factorsby multiplying them together
∗ Objective Calculation: Calculates the objective parameter with penaltyfactors
4.4.5 Validation
To validate the multiple ring rotor program, each major calculation step made by the single
ring program code was verified by an identical calculation made in the numerical analysis
package Maxima. For the material models, plots were made to verify appropriate behavior
across volume fractions. The stress distributions and objective calculations were verified
by comparing them to the single ring rotor program as well as another multiple ring rotor

71
program provided for verification [63], both of which use a different stress formulation to
the multiple ring rotor program used in this analysis. These calculations were also plotted
to look for any unusual or non-physical behavior. Last, the optimization algorithm was
tested against four different standard test functions with up to 50 dimensions: Rosenbrock,
Ackley, Rastrigin, and Schwefel.
4.5 Summary
In this section, the overall investigation methods and program tools have been discussed.
Section 4.1 discussed the strategies for proving equivalencies and non-physical behavior as
well as the assumptions and simplifications. Section 4.2 listed the conditions of the plot
points to be presented and described the degrees of freedom possible. Section 4.3 described
both the formulation and the function of the single ring rotor program. Last, Section 4.4
provided a full overview of the analytic formulation, the optimization algorithm, boundary
behavior, and program structure of the multiple ring rotor program.

Chapter 5
Results & Discussion
This chapter is divided into two phases. Phase I presents the results and discussion of
the objective/constraint investigation. For this section, the invalid, conditionally valid,
and equivalent objective/constraint combinations are discussed in detail. Both the single
material ring rotor program and the multiple ring rotor program are used for some of the
cases. In Phase II, three objective/constraint combinations are investigated along with all
of the design option combinations. For this analysis, only the multiple ring rotor program
is used. For some of the program results, the coding scheme is given in Figure 5.1. This
notation is used extensively in Appendix D for both the figures as well as the tables. Details
of the design options are given in Section 3.2.
5.1 Phase I: Objective/Constraint Investigation
In this section, thirteen objective/constraint combinations are explicitly discussed, with the
remainder considered valid and worthy of further detailed investigation. Objective/constraint
combinations in this section are identified according to the code presented in Table 3.1. As
can be seen in this table, grid location 1–A corresponds to Total Stored Energy, Fixed Radii.
This coding scheme is used in order to simplify the descriptions and avoid confusion. Please
refer to Table 3.1 to identify the proper notation when it is given in this chapter.
72

73
Figure 5.1: Notational illustration of the optimization case coding scheme used for thefigures and tables in Appendix D.
For the results and discussion, it is important to start with a notational illustration of
the generic stress distribution for loading a single-ring rotor centrifugally as well as applying
an inner boundary stress. Figure 5.2 illustrates the stress distributions in a single spinning
ring loaded with three different inner boundary radial stresses P : P = 0, P > 0 (tensile
loading), and P < 0 (compressive loading). For the purpose of this analysis, the outer
boundary radial stress is zero, W = 0, corresponding to conditions of the outer material
ring. Note that the notation used is the same as that in Section A.1. Increasing the tensile
inner boundary radial stress P reduces the magnitude of hoop stress and increases the
magnitude of radial tensile stress throughout the ring. While the effects of the boundary
conditions on the hoop and radial stresses of the ring are well known, these effects are
important for understanding the outcome of specific optimization cases later. Thus they
are shown for reference.

74
Figure 5.2: Notional illustration of radial and hoop stress distributions in a spinning, single-material ring with zero, compressive, and tensile inner boundary radial stresses P .
5.1.1 Fixed Inner & Outer Radii
Figure 5.3 demonstrates possible behavior relating to constraining both the inner and outer
radius for a multi-ring optimization. In these cases, all optimization objectives are con-
sidered to produce physically realistic, yet unknown, solutions and are considered valid.
However, certain objectives produce equivalent optimized design solutions. This fact can
be proven through basic dimensional analysis. For Kmv; if the inner and outer radius is
fixed so that the material volume is constant, the optimize stored energy value K is divided
by the constant volume. The same analysis applies to the Kev; if the outer radius is fixed
so that the enclosed volume is constant, K is again divided by the constant volume. This
observation is valid for both multi-ring and single ring rotors. Therefore, the optimized
solutions for combinations 3–A, and 4–A are equivalent to 2–A.
5.1.2 2–B: Enclosed Volume Energy Density, Fixed Inner Radius
Objective/constraint combination 2–B produces an equivalent optimized design solution
with that of 3–B. This fact can be proven through basic dimensional analysis. Because

75
Figure 5.3: For a fixed inner and outer radius, optimal solutions for K, Kev, and Kmv areidentical.
the inner radius is set, the open space, or hole, in the center that is included with the
enclosed volume is set to a constant value. Subtracting off this constant value from the
material volume does not change the optimization objectives. This observation is valid for
both multiple ring and single ring rotors. Therefore, the optimized solutions for option 2–B
are equivalent to that of option 3–B. Further information on combination 3–B is given in
section 5.1.11.
5.1.3 2–C: Enclosed Volume Energy Density, Fixed Outer Radius
Figure 5.4 illustrates two optimization cases with a variable inner radius and a fixed outer
radius. When optimizing on either K or Kev, the inner radius moves inward to maximize the
mass and volume of the rotor while the angular speed is maximized. These two parameters
interact to produce realistic, yet unknown, solutions and are considered valid. Therefore,
2–C is considered a valid option. However, this objective/constraint combination produces
equivalent optimized design solutions to 1–C. This fact can be proven through basic dimen-
sional analysis. For Kev, if the outer radius is fixed so that the enclosed volume is constant,
the optimized stored energy value K is divided by the constant volume. This observation
is valid for both multiple ring and single ring rotors. Therefore, the optimized solutions for
option 2–C are equivalent to option 1–C.

76
Figure 5.4: For a fixed outer radius, the optimal K search converges on a physically realisticsolution identical to the optimal Kev.
5.1.4 1–D: Total Stored Energy, Constraint-Free Radii
Figure 5.5 shows the maximum K for single rings having a fixed outer radius and variable
inner radius. It is important to note that for this figure, the shapes of the curves are
independent of geometric scaling. This figure is generated with P set to zero, –0.8 of YT ,
and +0.8 of YT . An example of how to read these graphs would be to note that for the E-
glass composite with a set outer radius of 0.1 m and P = 0, a peak energy storage capability
exists for the inner radius selection of roughly 0.072 m. It is noted that this is the location
where the limiting angular speeds due to hoop and radial strength limitations match. This
means that the overall shape of each graph is the same as long as the inner and outer radii
are both multiplied by the same factor, i.e. λ.
Figure 5.5 shows that the highest energy storage capability may not necessarily be
achieved with the highest hoop strength alone. The interaction between hoop and radial
elastic characteristics as well as mass density are highly relevant in determining the peak
energy storage capability. Because the outer radius is fixed and thus the enclosed volume is
fixed, Figure 5.5 also displays the same overall behavior as that of Kev, as given in Section
5.1.3.
Figure 5.6 shows how the K is affected by a constraint-free condition. Figure 5.6 high-
lights the fact that as the outer radius is allowed to grow, the optimized K value also grows.
The optimized thickness ratio λ is always the same for a given material and the P value and
is independent of outer radius selection. Once identified, the radii can be scaled upward

77
Figure 5.5: The maximum K for a single-material ring of fixed outer radius as a functionof inner radius with a series of curves corresponding to P values of –0.8, 0, and +0.8 of YT .
with the same λ to further increase K.
Figure 5.7 illustrates the cases where both the inner and outer radii are variable. For
the constraint-free option with the optimization of K, the geometry would align in a specific
manner for a single ring as shown in Figure 5.5, and then continue to scale upward without
bounds as shown in Figure 5.6. This statement can also be expanded to a multiple ring
scenario because no matter what optimized multiple ring rotor shape can be generated
to maximize energy storage capability, that geometry can be scaled up to produce a new
design with greater K compared to the original. For both a single ring and a multiple ring
rotor, combination 1–D produces an unbounded total stored energy solution. Therefore, no
realistic optimized total stored energy solution can be realized for option 1–D.

78
Figure 5.6: Optimized K for a single-material ring as a function of outer radius with variousP values ranging from –0.8 to +0.8 of YT with both ri and ro allowed to vary.
5.1.5 2–D: Enclosed Volume Energy Density, Constraint-Free Radii
In the previous section, it was identified that the radii can be scaled upward with the
same λ to further increase K. However, Kev does not increase with increased scaling once
the optimal λ has been identified. Figure 5.8 is displayed as a bar chart because Kev is
independent of outer radius selection. Even when adding a constant tensile or compressive
P , the scaling still does not change with geometry. Because the optimal solution is scale
invariant, combination 2–D produces an identical optimal solution to 2–C, and is thus
equivalent to 1–C as well.

79
Figure 5.7: For objective/constraint combination 1–D, the optimal K search produces aninfinitely large ring with the same λ factors as that of 1–C.
5.1.6 1–B: Total Stored Energy, Fixed Inner Radius
There is no simple single ring analysis that could be performed to show that 1–B is not a
valid objective/constraint combination. The only problems that were encountered occurred
with the multiple ring rotor program as shown in Table D.2 and Figures D.6, through D.10.
Design option (A) stood out as strongly affecting optimized results such that a logarithmic
scale needed to be used for the energy axis. More insight can be obtained by looking at
the optimized results as shown in Table 5.1. As can be seen, the outer radius is 4 orders
of magnitude larger than the inner radius. This design is simply a solid disk rotor with a
small hole in the center of it. Because the size of the rotor is so large, the angular speed
is very low. The optimization is attempting to obtain the largest scaling possible. The
method for achieving this optimization lies in the fiber volume fraction, which is virtually
non-existent. As can be seen in Figures D.6, through D.10, any design option combination
that includes (A) has its energy optimization significantly increased. Since nearly all of
the fibers have been eliminated from the optimization, the material properties of the rotor
are close to being isotropic. This situation has been analyzed before by both Christensen
in [14] and Mohr & Walter [16]. When isotropic materials are used, the most optimized
solutions come in the form of a solid disk, not a ring. Also, the highest shape factor for
isotropic material, as shown in Figure 2.2, is the isostress solid disk. Even a uniform disk
has a higher shape factor than a thin ring. For a fixed inner radius with a variable outer
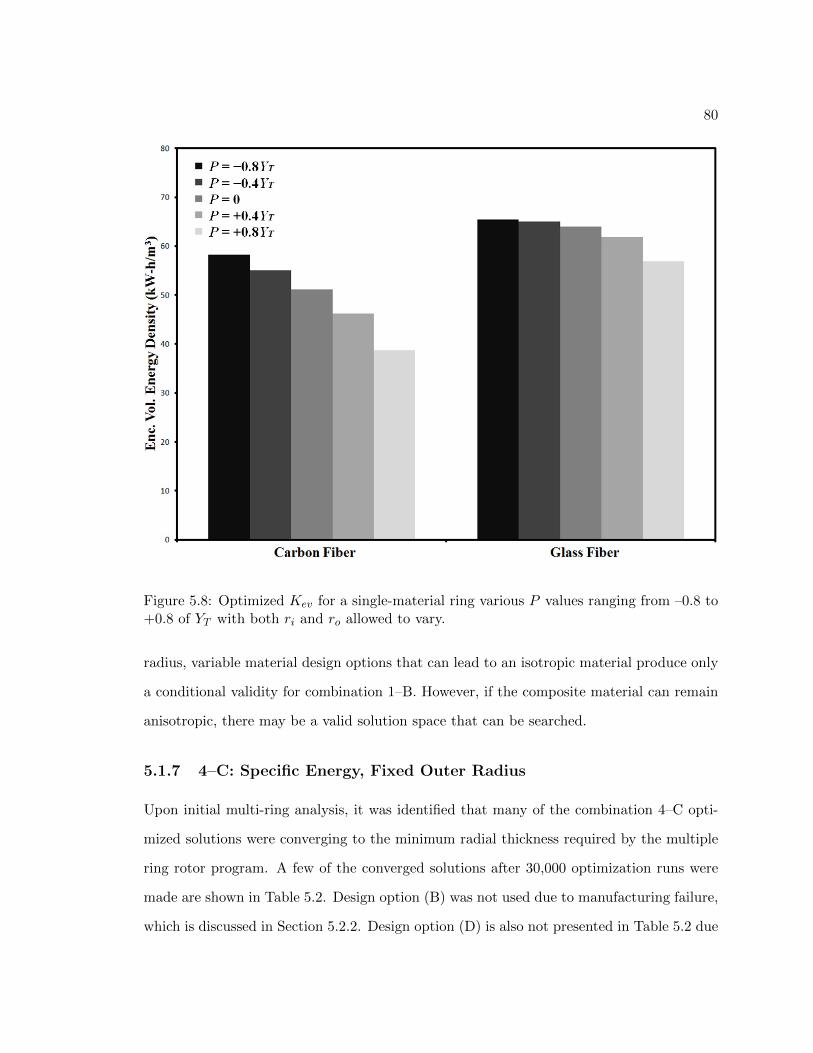
80
Figure 5.8: Optimized Kev for a single-material ring various P values ranging from –0.8 to+0.8 of YT with both ri and ro allowed to vary.
radius, variable material design options that can lead to an isotropic material produce only
a conditional validity for combination 1–B. However, if the composite material can remain
anisotropic, there may be a valid solution space that can be searched.
5.1.7 4–C: Specific Energy, Fixed Outer Radius
Upon initial multi-ring analysis, it was identified that many of the combination 4–C opti-
mized solutions were converging to the minimum radial thickness required by the multiple
ring rotor program. A few of the converged solutions after 30,000 optimization runs were
made are shown in Table 5.2. Design option (B) was not used due to manufacturing failure,
which is discussed in Section 5.2.2. Design option (D) is also not presented in Table 5.2 due

81
Table 5.1: Flywheel single ring rotor results using the multiple ring rotor program withdesign option (A) selected.
E–I–0–1101 Ring
Energy K (W·h) 5.13E+08
Angular Speed ω (rad/s) 9.02E-02
Ring Radius # 1 (m) 1.00E-01
Ring Radius # 2 (m) 1.03E+03
Composite Material # 5
Fiber Volume Fraction V f 2.98E-07
to the fact that the solution did not converge, with a maximum Km for the 3-Ring rotor
being 175 W·h/kg. This information poses an interesting insight: the optimization is mov-
ing toward an infinitesimally thin ring, with the 0.5 mm limit set by the code reached every
time. With this result, this objective/constraint combination required further investigation.
The discussion that follows shows that combination 4–C produces non-physical solutions
for the rotor as shown in Figure 5.9, and indicated in Table 5.2. It is important to note
that Figure 5.9 displays infinitesimally thin, non-physical optimal ring solutions for zero
and tensile P values.
For the situation of P = 0, the maximum Km for a fixed outer radius occurs at a
vanishing rotor thickness. Since the material is much stronger in hoop tension than radial
tension, a higher Km can be obtained when all of the material is uniaxially stressed in
the hoop direction, i.e. an infinitesimally thin ring. It is also noted that for Km, a slope
discontinuity occurs that corresponds to the peak K value and a transition between radial
tensile and hoop tensile failure modes. The limiting behavior of Km for P = 0 as the inner
and outer ring radii become equal can be analytically determined. Referring to Equation
A.7 in Appendix A, as ri → ro, then λ→ 1. Therefore, the angular speed for P = 0 can be
simplified according to Equation 5.1.

82
Table 5.2: Converged results for combination 4–C with the default design options as wellas (A), (C), and (E).
S-O-0-110 S-O-A-110 S-O-C-110 S-O-E-1103 Ring 3 Ring 3 Ring 3 Ring
Specific Energy Km 2.11E+02 2.11E+02 2.11E+02 2.11E+02(W·h/kg)
Angular Speed ω (rad/s) 4.94E+03 4.94E+03 4.95E+03 4.94E+03
Ring Radius 1 (m) 2.485E-01 2.485E-01 2.485E-01 2.485E-01
Ring Radius 2 (m) 2.49E-01 2.49E-01 2.49E-01 2.49E-01
Ring Radius 3 (m) 2.495E-01 2.495E-01 2.495E-01 2.495E-01
Ring Radius 4 (m) 2.50E-01 2.50E-01 2.50E-01 2.50E-01
Fiber 1 Material 1 # 1 1 1 1
Fiber 1 Material 2 # 1 1 5 1
Fiber 1 Material 3 # 1 1 5 1
Fiber 2 Material 1 # 5
Fiber 2 Material 2 # 1
Fiber 2 Material 3 # 1
Fiber Fraction 1 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 2 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 3 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber 1 Fraction 1 V f1 1.82E-01
Fiber 1 Fraction 2 V f1 3.42E-01
Fiber 1 Fraction 3 V f1 1.75E-01
Ballast Material 1 # 3
Ballast Material 2 # 1
Ballast Material 3 # 2
Ballast Fraction 1 V b · V m 3.00E-06
Ballast Fraction 2 V b · V m 9.84E-06
Ballast Fraction 3 V b · V m 7.75E-06
limλ→1
(ωh) =
√XT
ρr2o
(5.1)
For a vanishing thickness, the peak radial stress for P = 0 also goes to zero, allowing
the radial strength maximum angular speed to increase asymptotically. Therefore, ωh is
limiting when compared to ωr. The corresponding limit for Km is shown in Equation 5.2.

83
Figure 5.9: The maximum Km for a single-material ring of fixed outer radius as a functionof inner radius with a series of curves corresponding to P values of –0.8, 0, and +0.8 of YT .
limri→ro
(Km) =XT
2ρ(5.2)
The first situation to consider is the standalone single ring case with P = W = 0. It is
shown in Figure 5.9 that for the single free ring case with a fixed outer radius boundary, the
highest Km corresponds to an infinitesimally thin ring. If the angular speed and density
are held constant for a single ring, any rotor material placed inside the thin ring (smaller
radius) will lower Km. This is always the case for a single ring. However, this statement
does not cover a multi-ring rotor scenario. To investigate further, Km for a single thin
ring with P = W = 0 is analyzed first by taking one step back from the limit analysis of

84
Equation 5.2 to produce Equation 5.3 as shown.
limri→ro
(Km) =1
4
XT
ρ
[1 +
(riro
)2]
(5.3)
Note that the thin ring limit is used because it is the optimal case compared to a thick
ring case found by using Equations A.7 and A.8. Whenever material is placed at a radius ri
lower than boundary limit ro, there is always a penalty incurred because ri/ro < ro/ro = 1.
The issue in question is how to compensate beyond this penalty with an increase with
angular speed.
The first method to compensate beyond this penalty is with a multi-ring rotor that allows
the inner ring material to pull inward on the outer ring material. To compensate accordingly,
an inner ring material must have a higher strength-density ratio XT /ρ as the radius r is
lowered to be able to withstand the stresses of both itself and the outer ring material with
the lower XT /ρ. However, if this strategy is to be used, then the optimal solution would
instead be to simply place a material with the maximum XT /ρ at the outermost location.
A multi-ring material cannot improve Km with a superior XT /ρ material along the inner
radius if the best XT /ρ material is already being used as a single ring material located at
the outermost radius.
The second method to affect Km for a multi-ring rotor is to impose an inner boundary
radial stress P and somehow increase the maximum angular speed. This method is shown
in Figures 5.9 and 5.10 with the boundary conditions imposed. There are three possibilities:
(1) P = 0, (2) P > 0, (3) and P < 0.
1. The no-loading condition for a multi-ring rotor is a situation where each material
ring in the rotor does not impose radial stress on the other rings at the material
boundaries. This situation can at most match the limit of Figure 5.9; however, the
interior radius penalty previously stated prevents the addition of material to the inner
radial regions. So a multi-ring no-loading scenario can at best match the single ring

85
Figure 5.10: Optimized Km for a single-material ring with various P values ranging from–0.8 to 0 times the value YT with both ri and ro allowed to vary.
case with an infinitesimally thin ring as shown in Figure 5.9.
2. Constructing a multi-ring rotor with an inner ring applying a compressive P value on
the outermost ring decreases the optimized Km compared to a no-loading condition
as shown in Figure 5.10. Adding more hoop stress on the outer ring detracts from
the peak angular speed and thus P . This penalty can be combined with the interior
material radius penalty. Therefore, the optimal Km solutions with compressive P
value for multi-ring rotors are inferior to the single, infinitesimally thin ring case.
3. The tensile case is very interesting because the asymptotic increase in the Km shown in
Figure 5.9 reveals a possibility for an increase in the angular speed that can offset the

86
inner radial location penalty. As indicated in Figure 5.9, the reason this is happening
is because the centrifugal hoop stresses are being countered by the tensile P value. As
the radial thickness of the outer ring goes to zero, the angular speed can go to infinity
with a ring mass going to zero and P remaining constant. The problem with this
situation lies in the design of the inner ring structure relative to the outermost ring.
These inner rings have to pull inward on the outermost ring, meaning that they have
to withstand the loading from their own body force stresses in addition to the body
force stresses of the outermost ring. To be able to withstand the additional outermost
ring loading, the inner ring structure next to the outermost ring must have a higher
strength-density ratio XT /ρ than the outermost ring. If a multiple ring rotor is to be
designed with one or more inner rings having a higher XT /ρ than the outermost ring,
then it is inferior to a single-ring rotor that uses this higher XT /ρ material because
the single, infinitesimally thin ring avoids the inner ring radial location penalty.
The above analysis has reviewed and discredited all possible options for which a mul-
tiple ring rotor could produce a superior Km than a single, infinitesimally thin ring rotor.
Therefore, it can be stated that a multi-ring rotor cannot be physically constructed that is
superior in XT /ρ to a single, infinitesimally thin ring using the highest XT /ρ material. This
analysis combined with the multiple ring rotor program analysis allows for the following
statement: option 4–C produces a non-physical solution, as shown in Figure 5.11.
5.1.8 4–B: Specific Energy, Fixed Inner Radius
Initial multiple ring analysis had also revealed that many of the combination 4–B optimized
solutions were converging to the minimum radial thickness required by the multiple ring
rotor program. A few of the converged solutions after 30,000 optimization runs were made
are shown in Table 5.3. Again, design option (B) was not used due to manufacturing failure,
which is discussed in Section 5.2.2. Design option (D) is also not presented in Table 5.3
due to the fact that the solution did not converge, with a maximum Km for the 3-Ring

87
Figure 5.11: For objective/constraint combinations 3–B, 3–C, 4–B, 4–C, the optimal Km
or Kmv search produces an infinitesimally thin ring that is scale invariant.
rotor being 182 W·h/kg. This information poses the same interesting result as with 4–C:
the optimization is moving toward an infinitesimally thin ring, with the 0.5 mm limit set
by the code reached every time. Because this behavior is so similar to that of Section 5.1.7,
the Figures used there apply here as well.
Figure 5.9 shows the peak Km as ri is changed compared to the ro. However, this
graph can be used for any outer radius, regardless of scaling. The reason for this is that
optimizing on Km is scale-invariant. That is why Figure 5.10 is a column graph instead of
a plot of behavior as the radius changes. This scale-invariant attribute of the Km forces the
optimization to an infinitesimally thin ring given by Equation 5.2 regardless of whether it is
the ri or ro that is fixed. So long as one of the radii can move with no other constraints, a
non-physical thin ring solution results. Therefore, the optimized result of combination 4–C
is non-physical and thus not valid, as shown in Figure 5.11.
5.1.9 4–D: Specific Energy, Constraint-Free Radii
As discussed in Sections 5.1.8 and 5.1.7, Km is a scale-invariant objective. If one of the
radii can vary, the objective approaches the solution given in Equation 5.2. When both
radii are allowed to vary, the optimized solution does not change. Therefore, combination

88
Table 5.3: Converged results for combination 4–B with the default design options as wellas (A), (C), and (E).
S-I-0-110 S-I-A-110 S-I-C-110 S-I-E-1103 Ring 3 Ring 3 Ring 3 Ring
Specific Energy Km 2.09E+02 2.09E+02 2.10E+02 2.09E+02(W·h/kg)
Angular Speed ω (rad/s) 1.22E+04 1.22E+04 1.22E+04 1.22E+04
Ring Radius 1 (m) 1.00E-01 1.00E-01 1.00E-01 1.00E-01
Ring Radius 2 (m) 1.005E-01 1.005E-01 1.005E-01 1.005E-01
Ring Radius 3 (m) 1.01E-01 1.01E-01 1.01E-01 1.01E-01
Ring Radius 4 (m) 1.015E-01 1.015E-01 1.015E-01 1.015E-01
Fiber 1 Material 1 # 1 1 5 1
Fiber 1 Material 2 # 1 1 1 1
Fiber 1 Material 3 # 1 1 1 1
Fiber 2 Material 1 # 1
Fiber 2 Material 2 # 5
Fiber 2 Material 3 # 1
Fiber Fraction 1 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 2 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 3 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber 1 Fraction 1 V f1 5.33E-01
Fiber 1 Fraction 2 V f1 2.32E-01
Fiber 1 Fraction 3 V f1 3.00E-01
Ballast Material 1 # 2
Ballast Material 2 # 7
Ballast Material 3 # 2
Ballast Fraction 1 V b · V m 3.26E-05
Ballast Fraction 2 V b · V m 2.13E-06
Ballast Fraction 3 V b · V m 4.03E-05
4–D also produces a non-physical, invalid result. Investigation of the objective/constraint
combinations 4–B, 4–C, and 4–D have shown that the shape factor of 0.5 as given in Figure
2.2 extend to multiple ring case as well as the isotropic single ring case as given in Equation
5.2.

89
5.1.10 3–C: Material Volume Energy Density, Fixed Outer Radius
The analysis on 3–C is virtually identical to the analysis of 4–C, with the exception of
the factor of density. Table 5.4 shows that the multiple ring rotor program also displays
infinitesimal thin ring behavior. It shows a few of the converged solutions after 30,000
optimization runs were made. Design option (B) was not used due to manufacturing failure,
which is discussed in Section 5.2.2. Design option (D) is also not presented in Table 5.4
due to the fact that the solution did not converge, with a maximum Kmv for the 3-Ring
rotor being 268 kW· h/m3. These results show that the 0.5 mm limit set by the code was
reached for these cases.
With this information, another single ring analysis was conducted as shown in Figures
5.12 and 5.13. The single difference in this analysis compared to combination 4–C lies in a
factor of density. This factor is shown in Equations 5.4 and 5.5
limri→ro
(Kmv) =XT
2(5.4)
limri→ro
(Kmv) =1
4XT
[1 +
(riro
)2]
(5.5)
Save for the factor of density ρ, this section is identical in refuting all possible options
for which a multiple ring rotor could produce a superior Kmv than a single, infinitesimally
thin ring rotor. Therefore, it can be stated that a multi-ring rotor cannot be physically
constructed that is superior in XT to a single, infinitesimally thin ring using the highest XT
material. This analysis combined with the multiple ring rotor program analysis allows for
the following statement: option 3–C produces a non-physical solution, as shown in Figure
5.11.

90
Table 5.4: Converged results for combination 3–C with the default design options as wellas (A), (C), and (E).
D-O-0-110 D-O-A-110 D-O-C-110 D-O-E-1103 Ring 3 Ring 3 Ring 3 Ring
Mat. Vol. Energy3.46E+02 3.46E+02 3.46E+02 3.49E+02
Density Kmv (kW· h/m3)
Angular Speed ω (rad/s) 4.94E+03 4.94E+03 4.94E+03 4.60E+03
Ring Radius 1 (m) 2.485E-01 2.484E-01 2.485E-01 2.484E-01
Ring Radius 2 (m) 2.49E-01 2.49E-01 2.49E-01 2.49E-01
Ring Radius 3 (m) 2.495E-01 2.495E-01 2.495E-01 2.495E-01
Ring Radius 4 (m) 2.50E-01 2.50E-01 2.50E-01 2.50E-01
Fiber 1 Material 1 # 1 1 1 1
Fiber 1 Material 2 # 1 1 1 1
Fiber 1 Material 3 # 1 1 1 1
Fiber 2 Material 1 # 5
Fiber 2 Material 2 # 1
Fiber 2 Material 3 # 1
Fiber Fraction 1 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 2 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 3 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber 1 Fraction 1 V f1 5.42E-01
Fiber 1 Fraction 2 V f1 1.48E-02
Fiber 1 Fraction 3 V f1 5.28E-01
Ballast Material 1 # 5
Ballast Material 2 # 3
Ballast Material 3 # 5
Ballast Fraction 1 V b · V m 8.69E-02
Ballast Fraction 2 V b · V m 8.75E-02
Ballast Fraction 3 V b · V m 8.34E-02
5.1.11 3–B: Material Volume Energy Density, Fixed Inner Radius
Initial multi-ring analysis had also revealed that many of the combination 3–B optimized
solutions were converging to the minimum radial thickness required by the multiple ring
rotor program. A few of the converged solutions after 30,000 optimization runs were made
are shown in Table 5.5. Again, design option (B) was not used due to manufacturing failure,
which is discussed in Section 5.2.2. Design option (D) is also not presented in Table 5.3 due

91
Figure 5.12: The maximum Kmv for a single-material ring of fixed outer radius as a functionof inner radius with a series of curves corresponding to P values of –0.8, 0, and +0.8 of YT .
to the fact that the solution did not converge, with a maximum Kmv for the 3-Ring rotor
being 298 kW· h/m3. This information poses the same interesting result as with 4–C: the
optimization is moving toward an infinitesimally thin ring, with the 0.5 mm limit set by
the code reached every time. Because this behavior is so similar to that of Section 5.1.10,
the Figures used there apply here as well.
Figure 5.12 shows the peak Kmv as ri is changed compared to the ro. However, this
graph can be used for any outer radius, regardless of scaling. The reason for this is that
optimizing on Kmv is scale-invariant. That is why Figure 5.13 is a column graph instead of
a plot of behavior as the radius changes. This scale-invariant attribute of the Kmv forces
the optimization to an infinitesimally thin ring given by Equation 5.2 regardless of whether

92
Figure 5.13: Optimized Kmv for a single-material ring with various P values ranging from–0.8 to 0 times the value YT with both ri and ro allowed to vary.
it is the ri or ro that is fixed. So long as one of the radii can move, a non-physical thin ring
solution results. Therefore, the optimized result of combination 3–C is non-physical and
thus not valid, as shown in Figure 5.11.
5.1.12 3–D: Material Volume Energy Density, Constraint-Free Radii
As discussed in Sections 5.1.11 and 5.1.10, Kmv is a scale-invariant objective. If one of the
radii can vary, the objective approaches the solution given in Equation 5.4. When both
radii are allowed to vary, the optimized solution does not change. Therefore, combination
3–D also produces and non-physical, invalid result. Investigation of the objective/constraint
combinations 3–B, 3–C, and 3–D have shown that the shape factor of 0.5 applies material

93
Table 5.5: Converged results for combination 3–C with the default design options as wellas (A), (C), and (E).
D-I-0-110 D-I-A-110 D-I-C-110 D-I-E-1103 Ring 3 Ring 3 Ring 3 Ring
Mat. Vol. Energy3.44E+02 3.44E+02 3.44E+02 3.46E+02
Density Kmv (kW· h/m3)
Angular Speed ω (rad/s) 1.22E+04 1.22E+04 1.22E+04 9.24E+03
Ring Radius 1 (m) 1.00E-01 1.00E-01 1.00E-01 2.484E-01
Ring Radius 2 (m) 1.005E-01 1.005E-01 1.005E-01 2.49E-01
Ring Radius 3 (m) 1.01E-01 1.01E-01 1.01E-01 2.495E-01
Ring Radius 4 (m) 1.015E-01 1.015E-01 1.015E-01 2.50E-01
Fiber 1 Material 1 # 1 1 12 1
Fiber 1 Material 2 # 1 1 1 1
Fiber 1 Material 3 # 1 1 1 1
Fiber 2 Material 1 # 1
Fiber 2 Material 2 # 1
Fiber 2 Material 3 # 1
Fiber Fraction 1 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 2 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 3 V f 6.50E-01 6.50E-01 6.50E-01 6.50E-01
Fiber 1 Fraction 1 V f1 2.50E-03
Fiber 1 Fraction 2 V f1 4.56E-01
Fiber 1 Fraction 3 V f1 4.05E-03
Ballast Material 1 # 10
Ballast Material 2 # 10
Ballast Material 3 # 10
Ballast Fraction 1 V b · V m 8.75E-02
Ballast Fraction 2 V b · V m 7.93E-02
Ballast Fraction 3 V b · V m 8.73E-02
volume energy density for a multiple ring case as given in Equation 5.4.
5.1.13 The Remaining Combinations
There are three remaining combinations: 1–A, 1–C, and 4–A. These combinations have
undergone preliminary testing with the multiple ring rotor program and all 5 design options
to ensure that no non-physical or unbounded optimization behavior results. It is noted that
two of these valid objective/constraint combinations have both rotor radii fixed. This could

94
be the reason that the many of the multiple ring rotor analyses seen in Chapter 2 required
both radii to be fixed as well. Previous researchers may have attempted to allow one or
two of the rotor radii to vary, only to find unwanted results. Thus, they restructured their
analysis in a more constrained way. These three combinations are used in the Phase II
Investigation.
5.2 Phase II: Design Option Investigation
In this section, the results and discussion on the design options are presented. First, all five
design options are discussed and results presented. Next, the valid objective/constraint com-
binations are compared to each other. Last, some of the best design options are reviewed.
In addition to the coding schemes given in Table 3.1 and Figure 5.1, it is also important to
refer to the material listings given in Tables B.2 and B.6 to identify the materials used.
5.2.1 Variable Fiber/Matrix Option
As can be seen in Table 5.6, varying the fiber matrix ratio with no other design options pro-
vides very little useful benefit. The fiber volume fractions Vf typically rise to the maximum
of 65% fairly consistently. Since this is the default fiber fraction when design option (A)
is not used, there is almost no improvement when adding (A) in alone verses the default
fiber fraction of 65% for the K objective, and only a slight improvement when using the
Km objective. This is shown in Table 5.6 with most fiber fractions being set to 65% by the
optimization search. The accompanying performance values are given in Tables D.1, D.3,
and D.4. As can be seen in Table 5.6, design option (A) was useful for the Km by reducing
the fiber volume fraction of the inner ring. This option is useful because the density of the
epoxy is lower than the density of the glass fibers and reducing the mass of the inner ring
raises Km by placing a greater proportion of the mass of the rotor into the outer radial
regions of the rotor.
Looking at the graphs in Appendix D, a few more insights can be obtained. Most

95
Table 5.6: Best designs with (A) for three rings on each of the three valid objec-tive/constraint combinations.
E-O-A-110 E-IO-A-110 S-IO-A-1103 Ring 3 Ring 3 Ring
Angular Speed ω (rad/s) 4.33E+03 8.63E+02 9.18E+02
Ring Radius 1 (m) 1.82E-01 1.00E-01 1.00E-01
Ring Radius 2 (m) 2.06E-01 1.51E-01 1.29E-01
Ring Radius 3 (m) 2.17E-01 1.83E-01 1.81E-01
Ring Radius 4 (m) 2.50E-01 2.50E-01 2.50E-01
Fiber 1 Material 1 # 8 9 9
Fiber 1 Material 2 # 5 12 9
Fiber 1 Material 3 # 1 10 10
Fiber Fraction 1 V f 6.50E-01 6.50E-01 6.00E-02
Fiber Fraction 2 V f 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 3 V f 6.50E-01 6.50E-01 6.50E-01
benefit seen from (A) comes mainly when it is combined with option (E). This can be
seen in Figures D.5, D.15, and D.20. Another issue shown in these figures is that design
options (A) and (C) seem to overlap in capabilities and are competitive with each other.
As shown in Figure D.15, design combination (ACE) overlaps directly with (CE). Also,
design combination (AC) overlaps with both (A) and (C) for the K objective. For Km,
there is some improvement when these two options are used in concert, but not much. For
objective/constraint combination 1–A, option combination (AE) is superior to (CE). How-
ever, for 1–C, (CE) is superior to (AE). For 4–A, (CE) and (AE) are comparable to each
other. Given that varying the fiber/matrix ratio significantly is technically difficult for fly-
wheel rotor manufacturing using filament winding as well as other composite manufacturing
techniques, it is difficult to justify the use of this design option.
5.2.2 Radial/Hoop Fiber Option
Varying the radial/hoop fiber ratio with no other design options provides no benefit and
a severe penalty to even the default optimization with no design options selected. All of

96
the figures given in Appendix D show that any design option combination that includes
(B) suffers severe performance deficits. Both the variation on the number of rings as well
as the objective/constraint combinations offer no assistance to the poor performance of
this design option. The reason for this is shown in Figure 5.14 and Table B.4. As can be
seen in the figure, the residual loading between the two plies results in a roughly 9 MPa
tensile radial stress in the hoop ply, and a 9 MPa compressive radial stress in the radial ply.
However, Table B.4 shows that the limit for transverse tensile strength is 5 MPa. The high
modulus, low thermal expansion coefficient of the radial ply fibers are preventing the hoop
plies from thermally contracting in the radial direction. This result indicates that for the 5
MPa transverse strength, the hoop plies will fail in radial tension.
This result is not the case for the normal filament-wound rotors, so the natural question
results: Why are the radial fiber not simply eliminated by the optimization program? The
answer to this question lies in Figure 5.15. As fibers decrease in one direction or the other,
fewer fibers must hold under same force increasing the stress on them until the last fiber.
Zero fibers in one direction or the other may be peaks, but the algorithm is always pushed
away from those solutions. To deal with same stress, fewer fibers must take on more force.
When last fiber is removed, the strength associated with the epoxy is used instead of the
strength of the single remaining fiber, allowing for new stress state.
While the transverse strength limit of 5 MPa is low for multi-ply composite laminates,
there are factors that can justify this limit. Under centrifugal loading at high angular speeds,
high frequency vibrations can exist that can encourage growth in any micro-cracks that may
have been created in the hoop plies. If manufacturers cannot find a way to eliminate these
micro-cracks, the fatigue life of the flywheel rotor may be compromised. This may be the
reason that experimental manufacturing of rotors with both hoop and radial plies has been
limited. Most research up to now has been theoretical with neglect of the residual stresses.
However, with these results, it is suggested that research should switch back to performing
experimental validation that these rotors can survive both the manufacturing process and
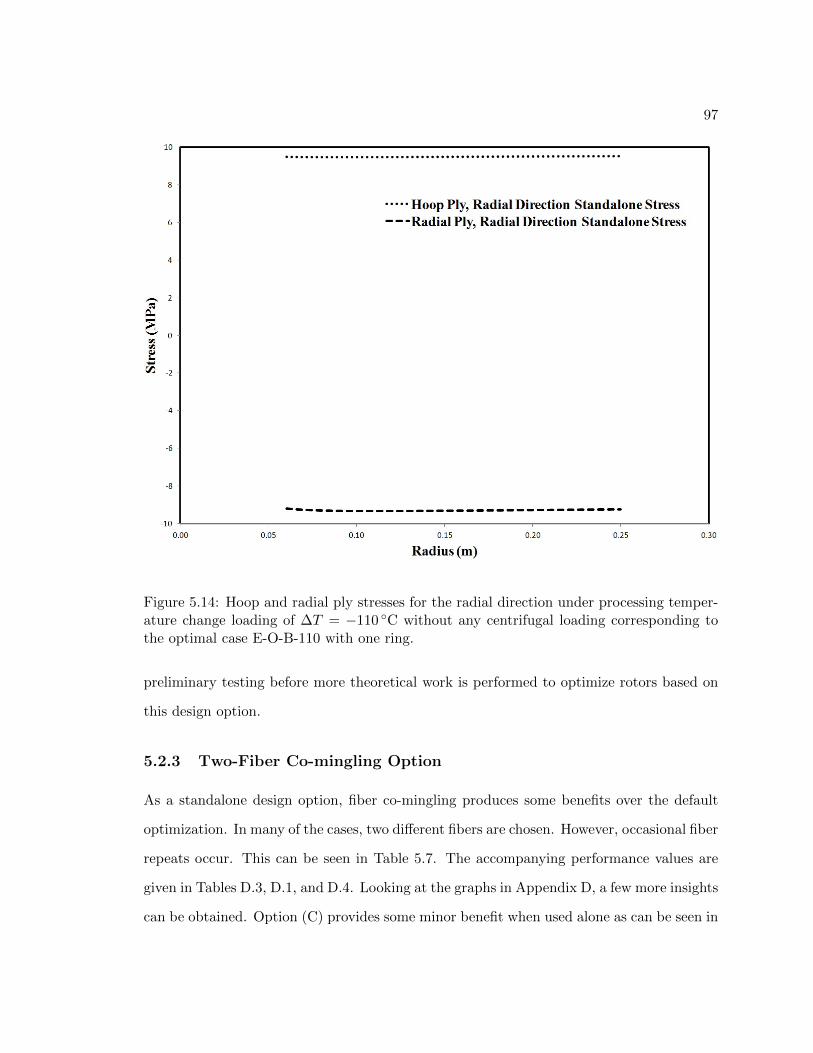
97
Figure 5.14: Hoop and radial ply stresses for the radial direction under processing temper-ature change loading of ∆T = −110 ◦C without any centrifugal loading corresponding tothe optimal case E-O-B-110 with one ring.
preliminary testing before more theoretical work is performed to optimize rotors based on
this design option.
5.2.3 Two-Fiber Co-mingling Option
As a standalone design option, fiber co-mingling produces some benefits over the default
optimization. In many of the cases, two different fibers are chosen. However, occasional fiber
repeats occur. This can be seen in Table 5.7. The accompanying performance values are
given in Tables D.3, D.1, and D.4. Looking at the graphs in Appendix D, a few more insights
can be obtained. Option (C) provides some minor benefit when used alone as can be seen in

98
Figure 5.15: Notational illustration of the optimization behavior of design option (B),showing that a step change in the optimization as the last fiber in a direction is removed.
Figures D.15, D.5, and D.20. As discussed before, there is overlap and competition between
options (A) and (C). Figure D.5 shows that combination (AC) provides little to no benefit
over either (A) or (C) alone. Combination (CE) provides minor benefit over (E) alone, but
in a rare case, combination (ACE) provides significant benefit. The combination of (ACE)
also provides significant benefit for objective/constraint combination 4–A as shown in Figure
D.20. However, Figure D.15 shows that combination (ACE) is nearly identical to (CE),
meaning that when one of the radii are allowed to vary, the additional design option (A) is
no longer needed to help optimize the rotor. Given that fiber co-mingling is a reasonably
simple addition to the manufacturing process of filament winding for composite rotors, the
additional benefit of this design option shows that it is worthy of further investigation for
optimization.

99
Table 5.7: Best designs with (C) for three rings on each of the three valid objec-tive/constraint combinations.
E-O-C-110 E-IO-C-110 S-IO-C-1103 Ring 3 Ring 3 Ring
Angular Speed ω (rad/s) 4.24E+03 8.81E+02 8.96E+02
Ring Radius 1 (m) 1.82E-01 1.00E-01 1.00E-01
Ring Radius 2 (m) 1.98E-01 1.50E-01 1.31E-01
Ring Radius 3 (m) 2.25E-01 1.80E-01 1.73E-01
Ring Radius 4 (m) 2.50E-01 2.50E-01 2.50E-01
Fiber 1 Material 1 # 2 9 9
Fiber 1 Material 2 # 5 6 8
Fiber 1 Material 3 # 1 1 1
Fiber 2 Material 1 # 9 9 9
Fiber 2 Material 2 # 12 12 8
Fiber 2 Material 3 # 1 10 10
Fiber Fraction 1 V f 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 2 V f 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 3 V f 6.50E-01 6.50E-01 6.50E-01
Fiber 1 Fraction 1 V f1 2.33E-01 3.36E-01 5.50E-02
Fiber 1 Fraction 2 V f1 5.25E-01 2.68E-05 5.88E-01
Fiber 1 Fraction 3 V f1 3.99E-01 9.81E-07 1.95E-07
5.2.4 Press-fitting Option
Of all the design options, press-fitting provides the most benefit when the inner and outer
radii are constrained. Design option (D) produces some amazing results and is clearly a
front runner from a theoretical standpoint, which is shown in Figures D.1, D.2, D.3, D.16,
D.17, and D.18. However, this ability to compensate for a highly constrained geometry
does not extend to the objective/constraint combination of 1–C, which is shown in Figures
D.11, D.12, and D.13. Single option designs are shown in Table 5.8. It must also be
noted that the search space for press-fitting may contain very small, sharp peaks that are
difficult for the search algorithm to identify. Many times for the constrained radii cases,
adding other design options made the space too complex to identify these high-performance
regions. Also, there have been cases where the press-fitting interferences are very small, as

100
shown for E–O–D–110 in Table 5.8 with the first intereference set to 18.5 microns. Given
that the small search peaks are difficult to find combined with the very small interference
fits that may be required, these two facts indicate that even slight deviations away from
the assigned interference can have a substantial impact on performance. Manufacturing
tolerances may not allow the optimized result to be reliably produced. Nonetheless, the
benefit of press-fitting is too great to simply discard. Other alternatives to incorporate this
design option are given in the next chapter.
Table 5.8: Best designs with (D) for three rings on each of the three valid objec-tive/constraint combinations.
E-O-D-110 E-IO-D-110 S-IO-D-1103 Ring 3 Ring 3 Ring
Angular Speed ω (rad/s) 4.49E+03 2.97E+03 2.97E+03
Ring Radius 1 (m) 1.70E-01 1.00E-01 1.00E-01
Ring Radius 2 (m) 1.87E-01 1.53E-01 1.53E-01
Ring Radius 3 (m) 2.27E-01 2.09E-01 2.09E-01
Ring Radius 4 (m) 2.50E-01 2.50E-01 2.50E-01
Fiber 1 Material 1 # 8 9 9
Fiber 1 Material 2 # 2 5 5
Fiber 1 Material 3 # 1 7 7
Fiber Fraction 1 V f 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 2 V f 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 3 V f 6.50E-01 6.50E-01 6.50E-01
Interference 1 (m) 1.85E-05 2.53E-04 2.53E-04
Interference 2 (m) 4.14E-04 3.62E-04 3.62E-04
5.2.5 Matrix Ballasting Option
Of the five options investigated, matrix ballasting is the most reliable benefit provider. A
list of designs incorporating (E) alone is given in Table 5.9. All three objective/constraint
combinations show significant benefit when (E) is used. For the highly constrained objec-
tive/constraint combinations 1–A and 4–A, (E) alone is superior to (A) and (C) alone, and
is comparable if not superior to (AC). This is shown in Figures D.5 and D.20. Option (E) is

101
only inferior to option (D). However, the greatest performance seen is when options (D) and
(E) are combined. For the objective/constraint combination 1–C, (E) alone is only slightly
below (D), and they provide comparable performance. This is shown in Figures D.11, D.12,
D.13, and D.15. When combined with (C) for (CE), this design combination is the second
highest seen, with (CDE) being only slightly higher in performance.
Table 5.9: Best designs with (E) for three rings on each of the three valid objec-tive/constraint combinations.
E-O-E-110 E-IO-E-110 S-IO-E-1103 Ring 3 Ring 3 Ring
Angular Speed ω (rad/s) 3.90E+03 9.12E+02 9.49E+02
Ring Radius 1 (m) 1.68E-01 1.00E-01 1.00E-01
Ring Radius 2 (m) 1.81E-01 1.50E-01 1.35E-01
Ring Radius 3 (m) 2.22E-01 1.84E-01 1.86E-01
Ring Radius 4 (m) 2.50E-01 2.50E-01 2.50E-01
Fiber 1 Material 1 # 8 9 9
Fiber 1 Material 2 # 5 12 8
Fiber 1 Material 3 # 1 10 10
Fiber Fraction 1 V f 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 2 V f 6.50E-01 6.50E-01 6.50E-01
Fiber Fraction 3 V f 6.50E-01 6.50E-01 6.50E-01
Ballast Material 1 # 10 10 10
Ballast Material 2 # 10 10 1
Ballast Material 3 # 1 2 2
Ballast Fraction 1 V b · V m 8.70E-02 8.75E-02 8.74E-02
Ballast Fraction 2 V b · V m 8.75E-02 8.74E-02 8.75E-02
Ballast Fraction 3 V b · V m 8.74E-02 8.75E-02 8.74E-02
Given that the performance of this design option is generally competitive, it is not known
why it has not been investigated further after identified by Genta in the mid-1980s [18, 13].
However, since it is capable of being included into existing manufacturing processes, design
option (E) is worthy of further investigation.

102
5.2.6 Comparing the Valid Objective/Constraint Combinations
By comparing the results shown in Appendix D concerning the objective/constraint com-
binations, valuable information can be extracted. Option (D) seems to be very valuable for
compensating for the added geometric constraint of 1–A and 4–A, but when this correc-
tion is not needed, as is the case with 1–C, option (D) provides reduced additional benefit.
Although the fixed radii situation provides a relatively thick rotor of 15 cm with λ = 0.4,
it was not expected that the difference between the best results of 1–A and 1–C would
be so large. Clearly, fixing both radii arbitrarily can impose significant detriment to the
optimization. However, it is anticipated that adding more material rings with option (D)
can allow a designer to partially compensate for this penalty.
Looking at the results of objective/constraint combination 1–C alone, it seems that
there is some plateauing behavior for a variety of design option combinations. The greatest
increase in performance lies in the transition from one material ring to two. Since the
transition from two rings to three rings provides a lower performance increase, this behavior
indicates a leveling off. Full plateauing effects would be anticipated in either a 4-ring or
5-ring scenario.
Along with objective/constraint combination 1–A, 4–C also is severely penalized by the
relatively thick rotor with λ = 0.4. This penalty is especially severe since a thick rotor
opposes the goal of an infinitesimally thin ring. Tables 5.6 and 5.8 provide good indication
of the fact that the highest XT /ρ materials were not used because of this thickness penalty.
5.2.7 Best Rotor Design Option Combinations
In Table 5.10 is a summary of the best designs seen in the multiple ring rotor analysis
for the three objective/constraint combinations. As can be seen, there are significant fluc-
tuations in material choices, interferences and various volume fractions. When combined
with the fact that none of these results have converged to satisfaction, the explicit designs
themselves are not the emphasis of this section. What is emphasized is the fact that for the

103
objective/constraint combinations of 1–A and 4–A, high performance materials may not be
what is needed to optimize a design with fixed radii. However, when one of the rotor radii
can vary, the highest strength materials can be selected.
Table 5.10: Best designs for three rings on each of the three valid objective/constraintcombinations.
E-O-CDE-110 E-IO-ADE-110 E-IO-CDE-1103 Ring 3 Ring 3 Ring
Angular Speed ω (rad/s) 4.05E+03 3.03E+03 3.31E+03
Ring Radius 1 (m) 1.68E-01 1.00E-01 1.00E-01
Ring Radius 2 (m) 1.81E-01 1.60E-01 1.48E-01
Ring Radius 3 (m) 2.22E-01 2.05E-01 2.15E-01
Ring Radius 4 (m) 2.50E-01 2.50E-01 2.50E-01
Fiber 1 Material 1 # 8 9 2
Fiber 1 Material 2 # 5 12 8
Fiber 1 Material 3 # 1 10 7
Fiber 2 Material 1 # 9 10 9
Fiber 2 Material 2 # 1 9 5
Fiber 2 Material 3 # 8 3 7
Fiber Fraction 1 V f 6.50E-01 7.76E-02 6.50E-01
Fiber Fraction 2 V f 6.50E-01 6.49E-01 6.50E-01
Fiber Fraction 3 V f 6.50E-01 6.50E-01 6.50E-01
Fiber 1 Fraction 1 V f1 6.25E-01 5.17E-02
Fiber 1 Fraction 2 V f1 6.47E-01 1.48E-02
Fiber 1 Fraction 3 V f1 6.50E-01 1.79E-01
Ballast Material 1 # 10 10 9
Ballast Material 2 # 10 9 1
Ballast Material 3 # 2 3 6
Ballast Fraction 1 V b · V m 8.73E-02 2.31E-01 8.51E-02
Ballast Fraction 2 V b · V m 8.74E-02 8.77E-02 8.71E-02
Ballast Fraction 3 V b · V m 7.12E-02 5.40E-02 8.04E-03
Interference 1 (m) 2.38E-07 1.79E-07 2.48E-04
Interference 2 (m) 1.50E-07 1.60E-06 2.54E-04

Chapter 6
Conclusions & Recommendations
With this investigation, many conclusions can be made that would be highly useful to fly-
wheel rotor designers in terms of optimization methodology and design techniques. This
investigation has provided much information that has not been seen. This chapters starts
with the relevant conclusions concerning the objective/constraint investigation, then moves
on to conclusions made from the design option investigation. In the design option investiga-
tion, insight is presented on the value of these design options, the most valuable materials
used for the optimized designs, how the chosen objective/constraint combinations affect the
results, and what can be learned from the convergence issues. Then, general guidance for
flywheel designers is given concerning initial design decisions. Last, future investigation
possibilities are presented.
6.1 Phase I: Objective/Constraint Investigation
A summary of the objective/constraint combinations is given in Table 6.1. Just as before
with Table 3.1, objective/constraint notation can be referenced here. This table provides
necessary information to a flywheel rotor designer who must optimize based on various
design considerations. This analysis revealed that under certain objective/constraint com-
binations, non-physical solutions would result, even for multi-ring rotors. This analysis also
104

105
revealed that certain combinations produce identical designs and are thus equivalent in their
design solutions. Of the sixteen possible combinations, five combinations have been shown
to produce equivalences in their optimized design, six produce non-physical optimization
results, one produces an unbounded optimization, one is conditionally valid, and three are
considered fully valid.
Table 6.1: Optimization objective validity and equivalency for different radius constraintcombinations.
(A) (B) (C) (D)
Fixed RadiiFixed Inner Fixed Outer Constraint-
Radius Radius Free Radii
1. Total StoredValid
ConditionalValid Unbounded
Energy K Validity
2. Encl. Vol. Energy= 1–A
Non-physical= 2–C = 2–C
Density Kev = 3–D
3. Mat. Vol. Energy= 1–A
Non-physical Non-physicalNon-physical
Density Kmv = 3–D = 3–D
4. SpecificValid
Non-physical Non-physicalNon-physical
Energy Km = 4–D = 4–D
Novel contributions concerning the Phase I investigation include the following:
• It has been shown that four objective/constraint combinations produce equivalent
optimization designs to other combinations without producing non-physical results.
• Objective/constraint combination 1–D has been revealed to produce an unbounded
optimization.
• It has been discovered objective/constraint combination 1–B is conditionally valid. If
the composite material is allowed to change into a material similar to an isotropic
material, such as through the design option of variable fiber/matrix ratios, the outer
rotor radius can expand out to a few orders of magnitude beyond the set inner radius.
This results in a non-realistic rotor design.

106
• While it has been known that the optimal specific energy for a single-material, thin-
ring rotor is Km = XT2ρ , it was not known that this factor also provides the upper limit
for multi-ring rotors with design options that include of variable fiber/matrix ratios,
two-fiber co-mingling, press-fitting, and matrix ballasting.
• It has been discovered that the material volume energy density optimization objective
for multi-ring hoop-direction fiber ring rotor flywheels exhibits highly similar behavior
to that of specific energy, resulting in an infinitesimally thin ring with an optimal value
of Kmv = XT2 that is invariant to scaling.
6.2 Phase II: Design Option Investigation
In this section, the utility of five design options is summarized. Also, conclusions and rec-
ommendations concerning the material selections are given. A note is made concerning how
the selection of valid objective/constraint combinations affects the design. Last, information
on restricting the optimization parameters to better ensure convergence is given.
6.2.1 Design Options
For information concerning the design option descriptions, please refer to Section 3.2 and
Figure 5.1. Also, refer to Table 6.1 for identification of the objective/constraint combina-
tions.
(A) When the variable fiber/matrix design option is used independently of other options,
little-to-no benefit is found. However, when used in conjunction with other design
options, occasionally some additional benefit is produced. It is most useful in spe-
cific energy because it allows the density to be reduced. This design option is best
applied when the rotor radii are both fixed. However, in the least restrictive valid
objective/constraint combination of 1–C, it provides no additional benefit when used
in conjunction with design option combination (CE). Considering the difficulty of

107
varying the fiber/matrix ratio for the filament winding process, it is not advised to
further pursue this design option.
(B) This investigation has shown the radial/hoop multi-ply design option to be a very poor
performer due to the fact that thermal stresses of the standalone rotor indicate radial
failure in the hoop ply. This due to the high stiffness and low thermal expansion in the
radial direction created by the radial plies. Although a very low YT was placed into
the material model database which may not be representative of multi-ply laminate,
micro-cracks can be produced for even higher YT if higher processing temperatures
are used to produce the flywheel. This may also shed light on the fact that, while
many theoretical analyses have been performed on multi-ply laminate flywheel rotors,
reliable testing data seems limited. Only if the manufacturing process for design
option (B) can prove to produce a reliable flywheel should this design option be
further investigated. Otherwise, it is advised that this design option not be pursued
further.
(C) The performance of hybrid fiber-comingling is comparable to design option (A). When
used in conjunction with other design options, some benefit is usually produced. How-
ever, it is much more effective given the objective/constraint combination of 1–C. Be-
cause incorporating this design option in the existing filament-winding manufacturing
process is feasible, further investigation of this design option is warranted.
(D) This investigation has shown that the press-fitting option is the best design option to
use. Given a highly constrained optimization of fixed radii, press-fitting can substan-
tially compensate for these constraints to the point where it can definitively outper-
form all other design options. However, when the lower constraint of only a fixed outer
radius is applied, other design option combinations become competitive. Also, many
of the results shown in the highly constrained cases indicate that the high performance
peaks in the search space can be very difficult to find while occasionally producing

108
interferences below 0.1 mm. Because these tolerances are a so small, some of the
high performance press-fitting results are not considered feasible. Therefore, it is not
advised to pursue this design option concerning press-fitting variables in its current
form. However, because the benefits can be significant, it is advised to incorporate
at least one assigned press-fit interference in the middle of the rotor and attempt to
optimize on that.
(E) Matrix ballasting is the second most beneficial design option investigated. When
optimizing on specific energy, its benefits are comparable to options (A) and (C).
However, when optimizing on total stored energy, its performance is solidly above
(A) and (C). When used in conjunction with (A) and/or (C), additional benefit is
seen. In the objective/constraint combination of 1–C, the performance of design
combinations using this design option are comparable, and in some cases superior,
to the performance of combinations using press-fitting. Although this design option
has been largely abandoned after its presentation by Genta in the 1980s [18, 13],
matrix ballasting has been shown to be highly useful. Because incorporating ballast
particles into a matrix is a well established manufacturing technique, this author
advises aggressive continued investigation of this design option.
Another design option to discuss would be the number of rings to use. While this
research was not able to investigate a higher number of material rings, valuable information
can be obtained from three rings alone. For the objective/constraint combination 1–C,
the start of strong plateauing behavior is shown in all cases. This behavior would suggest
drastic diminishing returns if one or two additional material rings are added. However, if
the optimization constraints include fixed rotor radii, this is not the case. The analysis
has shown that when using press-fitting in conjunction with fixed rotor radii, no plateauing
effects are noticed for 3 rings. This observation indicates that if the inner rotor radius is
allowed to vary, fewer rings are required.

109
6.2.2 Material Selections
For the material numbers given here, please refer to Tables B.2 and B.6. Concerning the
material selections, only a few materials ended up in the optimization. These were the high
strength carbon fiber materials #1 and #5 for the outer ring, and lower stiffness, yet high-
strength, fibers such as the glass fiber materials #8 and #9. For the highly constrained
cases with thick rotor requirements, lower performance materials such as #8 and #9 were
used exclusively. Occasionally, the high density steel fiber #12 was used in the middle and
inner rings. However, once matrix ballasting was included, the high density fibers were
not needed. These observations support all previous analyses suggesting that increasing
the stiffness/density ratio as the radius increases is a valid design approach. However, the
ultra-high stiffness carbon fibers #6 and #7 were not used. This result would indicate
that in order for the highest stiffness/density fibers to be useful, they must also possess the
highest fiber strength. This support previous investigative work of Arvin [64].
For the ballasting material, the highest density material #10 was selected for the inner
material rings. For the outer material rings, either #1, #2, or #3 was used. This selection
suggests that, in addition to density manipulation, stiffness and thermal expansion tuning
are also useful.
6.2.3 Objective Constraint Combinations
For the total stored energy objective, it has been shown that there is substantial benefit
to allowing one of the rotor radii to vary and be subjected to optimization. This benefit
alone is comparable to using the press-fitting design option. For specific energy of multi-
ring rotor designs, it is now known that the optimal design still calls for an infinitesimally
thin rotor. Adding any rotor thickness detracts from the optimal solution. Nonetheless,
the total stored energy objective investigation has shown that allowing one of the radii to
vary can produce substantial benefits. In order to balance the competing specific energy
problems of a trivial solution when allowing one rotor radii to vary, compared to the overly

110
constrained decision to fixed both radii, the following solution is proposed:
• Specific energy, fixed outer radius, with a minimum total stored energy constraint
This solution allows the inner radius to vary but requires some radial thickness to store
energy. Another solution to allow a designer to optimize on specific energy would be to
include a hub into the design of the rotor. The fact that a realistic thickness of composite
material is necessary to compensate for any displacements made by the hub under spin
loading could generate a realistic design.
6.2.4 Convergence Issues
Even for as few as three material rings, there were problems getting the solutions to con-
verge to satisfaction. There are three reasons for these problems. The first reason includes
issues with design option (B). Because a viable flywheel rotor could not be constructed
with (B) and the assigned strength values, many faulty designs were calculated. The sec-
ond reason was associated with design option (D). While including the press-fitting option
resulted in fantastic performance results compared to other design option combinations,
those fantastic results were very difficult for the search algorithm to find, indicating that
the solutions corresponding to very small, sharp peaks in the solution space. The last, and
most comprehensive reason that convergence proved difficult was that so many material
options were given, allowing for a large number of discrete search space hyper-cubes to be
investigated.
For fiber co-mingling and matrix ballasting on 3-ring rotors, (12 · 12 · 10)3 = 2.99 billion
discrete material search spaces must be investigated. If future investigations are conducted,
a much lower number of materials should be used. For composite material selections, one
high stiffness fiber, one medium stiffness fiber, and one low stiffness fiber could be selected.
With the varying degrees of stiffness, it is important to make sure all fibers have a high
strength. For ballasting materials, it is important to have one that is high density material,
such as #10, and one material that is of lower density, such as #1. It is possible to add in

111
high and low stiffness characteristics as well for a total of 4 ballasting materials. If theses
guidelines are followed, then the number of discrete material search cubes can be reduced
drastically: (3 · 3 · 4)3 = 46, 656. Other options to drastically reduce the number of discrete
search cubes would be to remove fiber the co-mingling and/or matrix ballasting design
options.
6.3 Avenues for Future Work
There are many avenues for further investigation. One investigation of merit would be
to determine how many more rings would be required to obtain an optimization limit. If
the number of materials in the material database are suitably reduced, it may be possible
to obtain converged results for a higher number of material rings within a rotor. Objec-
tive/constraint combinations of 1–A and 1–C can be compared for a higher number of rings
to determine the difference in the number of material rings required for reaching the upper
limit of optimization. Also, the limits of 1–A and 1–C could be compared to each other
for a large number of material rings. The objective/constraint combination of 4–A could
be compared to the proposed combination of specific energy, fixed outer radius, with a
minimum energy storage constraint in a fashion similar to the comparison of 1–A and 1–C.
With the number of material choices reduced, it would also be feasible to more critically
investigate some of the best design option combinations. Combination (CDE) can be com-
pared to the case of (CE). These two combinations can be compared to the case of (CE)
with an array of assigned press-fit values, which could account for manufacturing tolerances.
Any or all of the valid objective/constraint combinations could be applied in these analyses.
The goal of all this research would be to find a high-performance rotor design strategy that
is attractive for a rotor designer.

Bibliography
[1] Mavizen. AMP20M1HD-A: A123 20Ah LIFEP04 prismatic pouch cell. Online. 28 May2013. http://www.mavizen.com/products/amp20/, 2012.
[2] Maxwell Technologies. DATASHEET 160V MODULE: BMOD0006 E160 B02. On-line. 28 May 2013. http://www.maxwell.com/products/ultracapacitors/docs/
maxwell_160v_datasheet_v4.pdf, 2013.
[3] Compressed air energy storage. Online, 15 July 2011 http://en.wikipedia.org/
wiki/Compressed_air_energy_storage, 2011.
[4] A. P. Coppa and S. V. Kulkarni. Composite Flywheels: Status and Performance Assess-ment and Projections. Technical Report UCRL-89085, Lawrence Livermore NationalLaboratory, 1983.
[5] Flybrid Systems. CFT KERS. Online. 28 May 2013 http://www.flybridsystems.
com/CFTKERS.html, 2013.
[6] Volvo Car Group. Volvo Cars tests of flywheel technology confirm fuel savings of upto 25 percent. Online. 28 May 2013 https://www.media.volvocars.com/global/
enhanced/en-gb/Media/Preview.aspx?mediaid=48800, 25 April 2013.
[7] Williams Hybrid Power. WHP’s Flywheel Technology. Online. 10 May 2011. http://www.williamshybridpower.com/technology/whps-flywheel-technology, 2010.
[8] Torotrak PLC. Design and Specification. Online. 11 May 2011. http://www.torotrak.com/content/16/design-and-specification.aspx1, 2010.
[9] J. J. R. Hilton, D. Isaac, and L. Cross. High Speed Flywheel Seal. Patent, US2010/0059938 A1, 2010.
[10] H. Daneshi, N. Sadrmomtasi, and M. Khederzadeh. Wind power integrated with com-pressed air. In IEEE International Conference on Power and Energy, pages 634–9,2010.
[11] W. F. Pickard, N. J. Hansing, and A. Q. Shen. Can large-scale advanced-adiabaticcompressed air energy storage be justified economically in an age of sustainable energy?Journal of Renewable and Sustainable Energy, 1, 2009.
112

113
[12] Beacon Power Corporation. Smart Energy 25 Flywheel. Online. 11 May 2011. http://www.beaconpower.com/products/smart-energy-25.asp, 2011.
[13] G. Genta. Kinetic energy storage: Theory and practice of advanced flywheel systems.Butterworth & Co. ltd., 1985.
[14] R. M. Christensen and E. M. Wu. Optimal design of anisotropic (fiber-reinforced)flywheels. Journal of Composite Materials, 11:395–404, 1977.
[15] E. L. Danfelt, S. A. Hewes, and T.-W. Chou. Optimization of composite flywheeldesign. International Journal of Mechanical Science, 19(2):69–78, 1977.
[16] P. B. Mohr and C. E. Walter. Flywheel Rotor and Containment Technology Devel-opment - Final Report. Technical Report UCRL-53448, Lawrence Livermore NationalLaboratory, 1983.
[17] K. Ikegami, J.-I. Igarashi, and E. Shirator. Composite flywheels with rim and hub.International Journal of Mechanical Science, 25(1):59–69, 1983.
[18] G. Genta. On the design of thick rim composite material filament would flywheels.Composites, 15(1):49–55, 1984.
[19] K. Miyata. Optimal structure of fiber-reinforced flywheels with maximized energydensity. Bulletin of Japanese Society of Mechanical Engineers, 28(238):565–70, 1985.
[20] G.G. Portnov and I. A. Kustova. Energy capacity of composite flywheels with contin-uous chord winding. Mechanics of Composite Materials, 5:688–94, 1988.
[21] D. H. Curtiss, P.P. Nongeau, and R. L. Puterbaugh. Advanced composite flywheelstructural design for a pulsed disk alternator. IEEE Transactions on Magnetics, 31(1):26–31, 1995.
[22] C. W. Gabrys and C. E. Bakis. Design and testing of composite flywheel rotors.Composite Materials: Testing and Design, 13:1–22, 1997.
[23] S. G. Lekhnitskii. Anisotropic Plates. Gordon & Breach Science Publishers, 1968.
[24] S. K. Ha, H.-M. Jeong, and Y.-S. Cho. Optimum design of thick-walled composite ringsfor an energy storage system. Journal of Composite Materials, 32(9):851–73, 1998.
[25] I. M. Daniel and O. Ishai. Engineering Mechanics of Composite Materials. OxfordUniversity Press, 2006.
[26] S. K. Ha, H.-I. Yang, and D.-J. Kim. Optimal design of a hybrid composite flywheelwith a permanent magnet rotor. Journal of Composite Materials, 33(16):1544–75, 1999.
[27] D. Eby, R. C. Averill, W. F. Punch, and E. D. Goodman. The optimization of flywheelsusing an injection island genetic algorithm. Online. 2 Feb. 2011 http://garage.cse.
msu.edu/papers/GARAGe99-04-01.pdf, 1999.

114
[28] R. P. Emerson and C. E. Bakis. Viscoelastic behavior of composite flywheels. InProceedings of the 45th SAMPE Symposium and Exhibition, 21 May 2000. Corrected:4 April 2001.
[29] J. Tzeng. Mechanics of composite rotating machines for pulsed power applications.IEEE Transactions on Magnetics, 37(1):328–31, 2001.
[30] S. K. Ha, D.-J. Kim, and T.-H. Sung. Optimum design of multi-ring composite flywheelrotor using a modified generalized plane strain assumption. International Journal ofMechanical Sciences, 43:993–1007, 2001.
[31] Y. Gowayed, F. Abel-Hady, G. T. Flowers, and J. J. Trudell. Optimal design of multi-direction composite flywheel rotors. Polymer Composites, 23(3):433–41, 2002.
[32] R. P. Emerson and C. E. Bakis. Viscoelastic model of anisotropic flywheels. CompositeMaterials: Testing & Design, 14:75–92, 2003.
[33] C. K. Corbin, J. M. Ganley, and S. W. Tsai. Composite flywheel rotor technologydevelopment overview. Earth & Space, pages 890–97, 2004.
[34] G. G. Portnov, C. E. Bakis, and R. P. Emerson. Some aspects of designing multirimcomposite flywheels. Mechanics of Composite Materials, 40(5):397–408, 2004.
[35] G. G. Portnov, A.-N. Uthe, I. Cruz, and R.P. Fiffe F. Arias. Design of steel-compositemulitrim cylindrical flywheels manufactured by winding with high tensioning and insitu curing. Mechanics of Composite Materials, 41(2):139–152, 2005.
[36] A. C. Arvin and C. E. Bakis. Optimal design of press-fitted filament wound compositeflywheel rotors. Composite Structures, 72:47–57, 2006.
[37] B. C. Fabien. The influence of failure criteria on the design optimization of stacked-plycomposite flywheels. Structural Multidisciplinary Optimization, 33:507–17, 2007.
[38] M. Strasik, P. E. Johnson, A. C. Day, J. Mittleider, M. D. Higgins, J. Edwards, J. R.Schindler, K. E. McCrary, C. R. Melver, D. Carlson, J. F. Gonder, and J. R. Hull.Design, fabrication, and test of a 5-kWh/100-kW flywheel energy storage utilizing ahigh-temperature superconducting bearing. IEEE Transactions on Applied Supercon-ductivity, 17(2):2133–7, 2007.
[39] M. A. Arslan. Flywheel geometrydesign for improved energy storage using finite ele-ment analysis. Materials & Design, 29:514–8, 2008.
[40] S. K. Ha, J. H. Kim, and Y. H. Han. Design of a hybrid composite flywheel multi-rimrotor system using geometric scaling factors. Journal of Composite Materials, 42(8):771–85, 2008.
[41] S. K. Ha, H. H. Han, and Y. H. Han. Design and manufacture of a composite flywheelpress-fit multi-rim rotor. Journal of Reinforced Plastics and Composites, 27(9):953–65,2008.

115
[42] M. Krack, M. Secanell, and P. Mertiny. Cost optimization of hybrid composite flywheelrotors for energy storage. Structural and Multidisciplinary Optimization, 41:779–95,2010.
[43] K.-C. Lin, J. Gou, C. Ham, S. Helkin, and Y. H. Joo. Flywheel energy storage systemwith functionally gradient nanocomposite rotor. In 5th IEEE Conference on IndustrialElectronics and Applications, pages 611–3, 2010.
[44] J. L. Prez-Aparicio and L. Ripoll. Exact, integrated and complete solutions for com-posite flywheels. Composite Structures, 93(9):1404–15, 2011.
[45] M. Krack, M. Secanell, and P. Mertiny. Cost optimization of a hybrid compositeflywheel rotor with a split-type hub using combined analystical/numerical models.Structural and Multidisciplinary Optimization, 44:57–73, 2011.
[46] S. K. Ha, M. H. Kim, S. C. Han, and T.-H. Sung. Design and spin test of a hybridcomposite flywheel rotor with a split type hub. Journal of Composite Materials, 40(23):2113–18, 2006.
[47] S. K. Ha, S. J. Kim, S. U. Nasir, and S. C. Han. Design optimization and fabricationof a hybrid composite flywheel rotor. Composite Structures, 94:32909, 2012.
[48] P. J. J. van Rensburg, A. A. Groenwold, and D. W. Wood. Optimization of cylindricalcomposite flywheel rotors for energy storage. Structural Multidisciplinary Optimization,47:13547, 2013.
[49] M. H. Sadd. Elasticity: Theory, Applicaitons, and Numerics. Academic Press, 2009.
[50] R. M. Christensen. Mechanics of Composite Materials. John Wiley & Sons, Inc., 1979.
[51] S. W. Tsai and H. T. Hahn. Introduction to Composite Materials. Technomic PublisingCompany, 1980.
[52] R. M. Christensen. A critical evaluation for a class of micro-mechanics models. Journalof the Mechanics and Physics of Solids, 38(3):379–404, 1990.
[53] J. Kennedy and E. Russell. Particle swarm optimization. In IEEE International Con-ference on Neural Networks Proceedings - Conference Proceedings, volume 4, pages1942–8, 1995.
[54] R. Storn and K. Price. Differential evolution a simple and efficient heuristic for globaloptimization over continuous spaces. Journal of Global Optimization, 11:341–59, 1997.
[55] G. R. Harik and F. G. Lobo. A parameter-less genetic algorithm. In Proceedings of theGenetic and Evolutionary Computation Conference, volume 1, pages 258–65, 1999.
[56] G. R. Harik, F. G. Lobo, and D. E. Goldberg. The compact genetic algorithm. IEEETransactions on Evolutionary Computation, 3(4):287–97, 1999.
116
[57] K. Deb, A. Anand, and D. Joshi. A computationally efficient evolutionary algorithmfor real-parameter optimization. Evolutionary Computation, 10(4):371–395, 2002.
[58] N. Hansen and A. Ostermeier. Completely derandomized self-adaptation in evolutionstrategies. Evolutionary Computation, 9(2):159–95, 2001.
[59] N. Hansen. and A. Auger. A restart CMA evolution strategy with increasing populationsize. In Proceedings of the IEEE Congress on Evolutionary Computation, pages 1769–76, 2005.
[60] N. Hansen. and A. Auger. Performance evaluation of an advanced local search evolu-tionary algorithm. In Proceedings of the IEEE Congress on Evolutionary Computation,pages 1777–84, 2005.
[61] N. Hansen., A. Auger, R. Ros, S. Finck, and P. Posik. Comparing results of 31 algo-rithms from the black-box optimization benchmarking. In Genetic and EvolutionaryComputation Conference. Association for Computing Machinery, July 2010.
[62] N. Hansen. The CMA Evolution Strategy: A Tutorial. Online. 20 Jul. 2011. http://www.lri.fr/~hansen/cmatutorial.pdf, 2011.
[63] C. E. Bakis. personal correspondence. 22 December 2012.
[64] A. Arvin. Design of rotating machinery using anisotropic elasticity solutions and sim-ulated annealing. Master’s thesis, The Pennsylvania State University, 2004.
[65] E. Kreyszig. Advanced Engineering Mathematics. John Wiley & Sons, Inc., 1999.
[66] Hexcel. HexTow IM10 Carbon Fiber. Online. 12 January 2013. http://www.hexcel.com/resources/datasheets/carbon-fiber-data-sheets/im10.pdf.
[67] Toray Carbon Fibers America. T1000G Data Sheet. Online. 12 January 2013. http://www.toraycfa.com/pdfs/T1000GDataSheet.pdf.
[68] C. E. Bakis. personal correspondence. 25 May 2012.
[69] Toray Carbon Fibers America. T700G Preliminary Data Sheet. Online. 12 January2013. http://www.toraycfa.com/pdfs/T700GDataSheet.pdf.
[70] Toray Carbon Fibers America. M46J Data Sheet. Online. 12 January 2013. http://www.toraycfa.com/pdfs/M46JDataSheet.pdf.
[71] Toray Carbon Fibers America. M60J Data Sheet. Online. 12 January 2013. http://www.toraycfa.com/pdfs/M60JDataSheet.pdf.
[72] MatWeb. Aluminum 7075-T6; 7075-T651. Online. 15 January 2013. http://www.
matweb.com, 2013.
[73] MatWeb. Titanium Ti-6Al-6V-2Sn (Ti-6-6-2). Online. 15 January 2013. http://www.matweb.com, 2013.

117
[74] MatWeb. AISI Grade 18Ni (350) Maraging Steel, Aged, at RT, tested longitudinal,round bar 16 mm. Online. 15 January 2013. http://www.matweb.com, 2013.
[75] MatWeb. Ceradyne Ceralloy 546 Boron Carbide. Online. 14 February 2013. http://www.matweb.com, 2013.
[76] MatWeb. Silicon Carbide, Alpha SiC. Online. 14 February 2013. http://www.matweb.com, 2013.
[77] MatWeb. Overview - Alumina, 98%. Online. 14 February 2013. http://www.matweb.com, 2013.
[78] MatWeb. Titanium Carbide, TiC. Online. 14 February 2013. http://www.matweb.com,2013.
[79] MatWeb. Zirconium Carbide. Online. 14 February 2013. http://www.matweb.com,2013.
[80] Iron. Online, 8 June 2011 http://en.wikipedia.org/wiki/Iron, 2012.
[81] Lead. Online, 17 June 2011 http://en.wikipedia.org/wiki/Lead, 2012.
[82] MatWeb. Tantalum Carbide, TaC. Online. 14 February 2013. http://www.matweb.com/search, 2013.
[83] MatWeb. Tungsten Carbide, WC. Online. 14 February 2013. http://www.matweb.com,2013.

Appendix A
Analytic Formulations
The stress and failure formulations presented for the single ring rotor program are based
on the Gabrys & Bakis article [22] as well as books by Genta [13] and Lekhnitskii [23]. The
stress and failure formulations presented for the multiple ring rotor program are based on
multiple articles by Ha et al. [24, 26, 30] and the book by Daniel and Ishai [25]. In these
formulations, each symbol is not denoted below the equations as with the main chapters.
This is done to save space and prevent redundancy in denoting the symbols. However, all
the symbols are given in the List of Symbols.
A.1 Single Ring Formulation
Equations A.1 through A.4 define parameters that are used to simplify the formulas for
stresses in Equations A.5 and A.6.
χ =r
ro(A.1)
λ =riro
(A.2)
118

119
µ =
√EhEr
(A.3)
L =λ−µ−1 − λ2
λ−µ−1 − λµ−1(A.4)
σh = ρω2r2o
(3 + νhr9− µ2
)[µLχµ−1 + µ (L− 1)χ−µ−1 − χ2
(µ2 + 3νhr3 + νhr
)]+
µ
1− λ2µ
[(W − Pλµ+1
)χµ−1 +
(Wλµ−1 − P
)λµ+1χ−µ−1
](A.5)
σr = ρω2r2o
(3 + νhr9− µ2
)[Lχµ−1 − (L− 1)χ−µ−1 − χ2
]+
1
1− λ2µ
[(W − Pλµ+1)χµ−1 − (Wλµ−1 − P )λµ+1χ−µ−1
](A.6)
For the inner and outer boundary radial stresses, P and W , a positive value represents
radial tension, while a negative value represents radial compression. Equations A.1 through
A.6 are used to determine the radial and hoop stress, σr and σh, at a radial location r.
To determine the maximum stresses for given radial dimensions, it is necessary to eval-
uate Equations A.5 and A.6 where their first derivatives are zero and also at the inner and
outer boundaries to determine the maximum hoop and radial stress locations. With the
maximum stress locations known, it is possible to calculate the maximum angular speeds
for the given maximum strength using the maximum stress failure criterion as shown in
Equations A.7 and A.8.
ωh =
√√√√ 1
ρr2o
(9− µ2
3 + νhr
)XT − µ
1−λ2µ
[(W − Pλµ+1
)χµ−1 + λµ+1
(Wλµ−1 − P
)χ−µ−1
]µLχµ−1 + µ (L− 1)χ−µ−1 − χ2
(µ2+3νhr3+νhr
) (A.7)
ωr =
√1
ρr2o
(9− µ2
3 + νhr
)YT − 1
1−λ2µ
[(W − Pλµ+1
)χµ−1 − λµ+1
(Wλµ−1 − P
)χ−µ−1
]Lχµ−1 − (L− 1)χ−µ−1 − χ2
(A.8)
For these equations, the maximum angular speed based on hoop stress ωh can be com-

120
pared to the radial stress maximum angular speed ωr to determine which is more limiting
(lower). Note that the hoop tensile strength XT and radial tensile strength YT are used
in these equations as well. Because W is zero for the outermost ring and the magnitude
of P is always lower than the magnitude of the radial tensile strength YT , the compressive
strengths XC and YC are not considered due to the more conservative boundary stress limits
provided by the magnitude of YT . The only cases where the compressive strengths are used
are when a compressive P is applied such that the boundary is not subject to a compres-
sive radial stress greater than the maximum stress failure limits allow. Other issues with
these equations include material-related non-physical behavior such as µ = 3 and νhr = −3.
These specific property values are not used in this analysis.
A.2 Multiple Ring Formulation
This formulation first starts with defining the Thermo-elastic Stress—Strain Rela-
tions. Using the plane stress assumption σz = 0, and the fact that shear stresses are not
included in this analysis, these relations can be defined according to Equation A.9.
(σθσr
)=
[Qθθ QθrQrθ Qrr
]{(εθεr
)+
(αθαr
)(∆T )
}(A.9)
The next set of equations to develop are the Force Equilibrium Equations. For a
thin disk, cylindrical coordinates are used. For centrifugal loading under equilibrium, there
are no shear stresses involved. Also, the body forces for centrifugal loading are in the radial
direction only. Therefore, only the radial force component equilibrium equation with the
shear stresses set to zero is relevant. These assumptions result in Equation A.10.
dσrdr
+σr − σθ
r+ ρrω2 = 0 (A.10)
The next step is to determine and simplify the relevant Strain—Displacement Re-

121
lations. For the plane stress assumption with centrifugal loading, only two of the strain
components are needed. These are the radial and circumferential strains. Since the only
displacements for centrifugal loading are in the radial direction, only radial displacements
exist, providing the relevant relations as given in Equations A.11 and A.12
εθ =urr
(A.11)
εr =∂ur∂r
(A.12)
The previous equations give us the ability to relate forces to stresses (Equilibrium Equa-
tion), stresses to strains (Stress—Strain Relations), and strains to displacements (Strain—
Displacement Relations). These equations, with boundary conditions, are all that is needed
to completely define the system. The goal is to determine the stresses, strains, and dis-
placements in terms of equations that are only dependent on the radial coordinate r. In
order to do this, a number of mathematical steps are performed:
1. Use the Stress—Strain Relations and Strain—Displacement Relations to develop equa-tions for the stresses in terms of displacements.
2. Take the newly-formed Stress—Displacement Relations and place them in the Equi-librium Equation to obtain an Ordinary Differential Equation (ODE) in terms of theradial displacement ur and radial coordinate r.
3. Solve the second-order ODE. Both the homogeneous and particular solutions are rel-evant.
4. Using the radial displacement solution in terms of the radius, solve for the stressesand strains in terms of the radius.
The Stress—Displacement Relations are given in Equations A.13 and A.14.
σθ = Qθθurr
+Qθr∂ur∂r− (Qθθαθ +Qθrαr) ∆T (A.13)

122
σr = Qθrurr
+Qrr∂ur∂r− (Qθrαθ +Qrrαr) ∆T (A.14)
These equations are placed into the Equilibrium Equation to produce what is given in
Equation A.15.
r2d2urdr2
+ rdurdr− QθθQrr
ur = − 1
Qrr
{ρr3ω2 + [(Qθθ −Qθr)αθ + (Qθr −Qrr)αr] r∆T
}(A.15)
For this ordinary differential equation, the homogeneous solution is of the form of an
Euler-Cauchy equation and can be evaluated as such. For the particular solution, the
Method of Variation of Parameters is applied, where the Wronskian is found and used [65].
The solution of the radial displacement in terms of the radial coordinate alone is given in
Equation A.19, with material property factors given in Equations A.16, A.17, and A.18.
κ =
√QθθQrr
(A.16)
φ0 =1
Qrr
(1
κ2 − 9
)(A.17)
φα1 =1
Qrr
(1
κ2 − 1
)[(Qθθ −Qθr)αθ + (Qθr −Qrr)αr] (A.18)
ur = Carκ + Cbr
−κ + φ0ρr3ω2 + φα1r (∆T ) (A.19)
Knowing the radial displacement in terms of the radial coordinate, all the radial and
circumferential stress and strains can be determined in terms of the radial coordinate as
well. These are given in Equations A.28 through A.31, with additional material property
factors given in Equations A.20 through A.27.

123
φ1 = Qθr + κQrr (A.20)
φ2 = Qθr − κQrr (A.21)
φ3 = φ0 (Qθr + 3Qrr) (A.22)
φ4 = Qθθ + κQθr (A.23)
φ5 = Qθθ − κQθr (A.24)
φ6 = φ0 (Qθθ + 3Qθr) (A.25)
φα2 = (Qθr +Qrr)φα1 − (Qθrαθ +Qrrαr) (A.26)
φα3 = (Qθθ +Qθr)φα1 − (Qθθαθ +Qθrαr) (A.27)
εr = κCarκ−1 − κCbr−κ−1 + 3φ0ρr
2ω2 + φα1 (∆T ) (A.28)
εθ = Carκ−1 + Cbr
−κ−1 + φ0ρr2ω2 + φα1 (∆T ) (A.29)
σr = Caφ1rκ−1 + Cbφ2r
−κ−1 + φ3ρr2ω2 + φα2 (∆T ) (A.30)
σθ = Caφ4rκ−1 + Cbφ5r
−κ−1 + φ6ρr2ω2 + φα3 (∆T ) (A.31)
Now that the equations for stress, strain, and displacement are known for a centrifugally
loaded ring, the next step is to construct a series of equations to solve for the unknown
solution constants with boundary conditions set as the adjacent elements. This is performed
in the following steps:
1. For a single ring, two displacement equations for the inner and outer radial boundariesare constructed as a matrix equation.
2. For a single ring, two normalized force equations for the inner and outer radial bound-

124
aries based on the stress equations are constructed as a matrix equation.
3. The displacement and normalized force matrix equations are rewritten and set equalto the unknown constant vector.
4. The displacement and normalized force matrix equations are combined to produceforce-displacement equations for a single ring.
5. The equations for multiple rings are combined for a global force-displacement equation.
For the inner and outer ring radius, the boundary displacement vector can be constructed
from the radial displacement equations to produce Equation A.37 with factor definitions
given in Equations A.32 through A.36.
u =
(uriuro
)(A.32)
uω = φ0ρω2
(r3i
r3o
)(A.33)
u∆T = φα1 (∆T )
(riro
)(A.34)
g =
(rκi r−κirκo r−κo
)(A.35)
c =
(CaCb
)(A.36)
u = uω + u∆T + g c (A.37)
The boundary force vector can also be constructed for the outer and inner edges of the
ring. The axial length is removed because it is constant throughout the equations, but
the radial lengths are not. This is shown in Equation A.43 with factor definitions given in
Equations A.38 through A.42.

125
f b =
(−riσrroσr
)(A.38)
fσ = φ3ρω2
(−r3
i
r3o
)(A.39)
f∆T = φα2 (∆T )
(−riro
)(A.40)
I∗ =
(−1 00 1
)(A.41)
Φ =
(φ1 00 φ2
)(A.42)
f b = fσ + f∆T + I∗ gΦ c (A.43)
These equations can be rearranged and set equal to each other to eliminate some factors
as shown in Equation A.47 with factor definitions given in Equations A.44 through A.46.
ζ =riro
(A.44)
ζ1 = ζ−κ − ζκ (A.45)
k = I∗ gΦ g −1 =1
ζ1
(φ1ζ
κ − φ2ζ−κ φ2 − φ1
φ2 − φ1 φ1ζ−κ − φ2ζ
κ
)(A.46)
f b − fσ − f∆T = k u− k uω − k u∆T = I∗ gΦ c (A.47)
Setting the previous force and displacement equations equal allows us to eliminate the
constant vector and rearrange the previous equations into a form given by Equation A.50
with factor definitions given in Equations A.48 and A.49.

126
fω = −fσ + k uω (A.48)
f ε∆T = −f∆T + k u∆T (A.49)
k u = f b + fω + f ε∆T (A.50)
From here, the next step is to define the boundary conditions between each material
ring. Equation A.51 is a statement that the radial stresses at the boundary condition of
each ring interface must match. Equation A.52 is the statement that ring displacement at
the boundary condition of each ring interface must match, unless there is a press-fit condi-
tion which produces a set small displacement that must be added into the ring interface.
Equation A.53 is the loading term associated with the interference displacement. Note that
the notation for n is such that it counts upward from the inner radius, meaning the inner
ring is denoted as Ring 1, and the outer ring is denoted as Ring N . Also, the assigned ring
radii are also defined as increasing in number from inner to outer radius.
σ(n)ro = σ(n+1)
ri (A.51)
u(n)ro + δ(n) = u(n+1)
ri (A.52)
f(n)δ = k
(n)(
0
δ(n)
)=
(f
(n)δ1
f(n)δ2
)(A.53)
With these conditions, the global system of equations can be constructed to solve for
all of the displacements. This is shown in Equation A.60 with factor definitions given in
Equations A.54 through A.59.

127
U =
u(1)r1...
u(n−1)r1
u(n)r1...
u(N)r1
u(N)r2
(A.54)
K =
N∑n=1
k (n) =
k(1)11 · · · 0 0 · · · 0...
. . ....
... . .. ...
0 · · · k(n−1)22 + k
(n)11 k
(n)12 · · · 0
0 · · · k(n)21 k
(n)22 + k
(n+1)11 · · · 0
... . .. ...
.... . .
...
0 · · · 0 0 · · · k(N)22
(A.55)
F b =N∑n=1
f(n)b =
−r1σ(1)r1
0
...
0
−rN+1σ(N)r2
(A.56)
Fω =N∑n=1
f(n)b =
f(1)ω1
...
f(n−1)ω2 + f
(n)ω1
f(n)ω2 + f
(n+1)ω1
...
f(N)ω2
(A.57)

128
F ε∆T =N∑n=1
f (n)ε∆T
=
f(1)ε∆T1
...
f(n−1)ε∆T2
+ f(n)ε∆T1
f(n)ε∆T2
+ f(n+1)ε∆T1
...
f(N)ε∆T2
(A.58)
F δ =N∑n=1
f(n)δ =
f(1)δ1...
f(n−1)δ2
+ f(n)δ1
f(n)δ2
+ f(n+1)δ1
...
f(N)δ2
(A.59)
U = K −1(F b + Fω + F ε∆T + F δ
)(A.60)
With this global displacement vector information, each displacement pair for one mate-
rial ring can be used to calculate c corresponding to each material ring. This is shown in
Equation A.62, which corresponds back to a single material ring. Equation A.61 corresponds
to the displacement vector resulting from the set interference.
uδ =
(0δn
)(A.61)
c = g−1
(u− uω − u∆T − uδ) (A.62)
Solving this series of equations provides all of the boundary condition constants for the

129
stress Equations A.30 and A.31. These stress equations can be used directly for a single
ply composite where all the fibers are oriented in one direction. However, if there are
both radial and hoop fiber orientations, a muli-ply stress calculation must be used. For
the multi-ply stress calculation, the overall strains given in Equations A.28 and A.29 must
first be calculated. With the strains and the individual ply stiffness matrices known, the
stresses can be calculated from the Stress—Strain Relations given in Equation A.9. Once
these stresses are known, failure criteria can be applied to all radial locations for which
the stresses were calculated. With the maximum stress criterion, it is a simple matter of
comparing the stress values to the material strengths. However, for the Tsai-Wu failure
criterion, the calculations given in Equations A.63 through A.67 must be performed. This
failure criterion is satisfied when R = 1.
σT Z σ + Z σR−R2 = 0 (A.63)
R =
Z σ +
√(Z σ)2
+ 4(σT Z σ
)2
(A.64)
σ =
(σθσr
)(A.65)
Z =
(1
XT− 1
XC
1
YT− 1
YC
)(A.66)
Z =
1
XTXC−1
2
√1
XTXC
1
YTYC
−1
2
√1
XTXC
1
YTYC
1
YTYC
(A.67)
A.2.1 Stress Calculation Procedure
All of the information required to calculate the stresses for all the small flywheel thin shells
is given. The computational procedure is as follows:

130
1. Determine flywheel speed ω, rim radii r(n), rim interface displacements δ(n), andcomposite material properties.
2. Calculate material property constants and obtain the spring constant coefficients for
the stiffness matrix K.
3. Calculate all the force terms F b, Fω, F ε∆T , and F δ; with the known information.
4. Determine all of the displacements by evaluating the Equation A.60.
5. Determine the integration constants C(n)a and C
(n)b for each material ring using Equa-
tion A.62 and the global displacement information.
6. With all the integration constant information obtained, determine the radial andcircumferential plane stresses for each ply using either Equations A.30 and A.31; orEquations A.9, A.28, and A.29.
7. Apply the maximum stress and 2-D Tsai-Wu failure criteria on all stresses calculated.

Appendix B
Composite Material Properties
This appendix contains the material properties used in all calculations. In the single ring
rotor program, the material properties are not allowed to vary according to any material
models. Therefore, the information required is much less than the multiple ring program.
The material properties were obtained from a variety of sources, which are referenced the
tables of this appendix. For the strength values given in Table B.4, a 30% fatigue knockdown
penalty (70% of original property value) was incorporated for all carbon fiber composites,
and a 50% fatigue knockdown penalty was incorporated for all other fiber materials.
131

132
Table B.1: Material properties of selected unidirectional fiber composite materials for thesingle material ring rotor optimization program [25, 66].
E-Glass/EpoxyHigh StrengthCarbon/Epoxy
Fiber Volume Fraction Vf 0.55 0.60
Mass Density ρ (g/cm3) 1.97 1.60
Hoop Modulus Eh (GPa) 41 190
Radial Modulus Er (GPa) 10.4 9.9
Hoop Tensile Strength Xt (MPa) 1140 3310
Radial Tensile Strength Yt (MPa) 39 62
Hoop Comp. Strength Xc (MPa) 620 1793
Radial Comp. Strength Yc (MPa) 128 200
Poissons Ratio νθr 0.28 0.35
Table B.2: Densities, composite volume fractions, elastic moduli, and Poisson’s ratios forthe multiple ring rotor program composite materials database.
Material LabelVolume Density Poisson’sFraction ρ (g/cm3) Ratio νθr
1 [67, 68] T1000G-9405,9470EPOXY 0.55 1.57 0.30
2 [69, 68] T700G-9405,9470EPOXY 0.55 1.57 0.34
3 [25] AS4,3501-6EPOXY 0.63 1.60 0.27
4 [25] IM6G,3501-6EPOXY 0.66 1.62 0.31
5 [25] IM7,977-3EPOXY 0.65 1.61 0.35
6 [70, 68] M46J-9405,9470EPOXY 0.55 1.59 0.30
7 [71, 68] M60J-9405,9470EPOXY 0.55 1.64 0.30
8 [25, 68] S2GLASS-9405,9470EPOXY 0.60 1.94 0.28
9 [25, 68] EGLASS-9405/9470EPOXY 0.60 2.02 0.28
10 [72, 68] Al7075-9405/9470EPOXY 0.60 2.15 0.358
11 [73, 68] Ti-6Al-6V-2Sn-9405/9470EPOXY 0.60 3.19 0.352
12 [74, 68] 350MaragSteel-9405/9470EPOXY 0.60 5.31 0.34
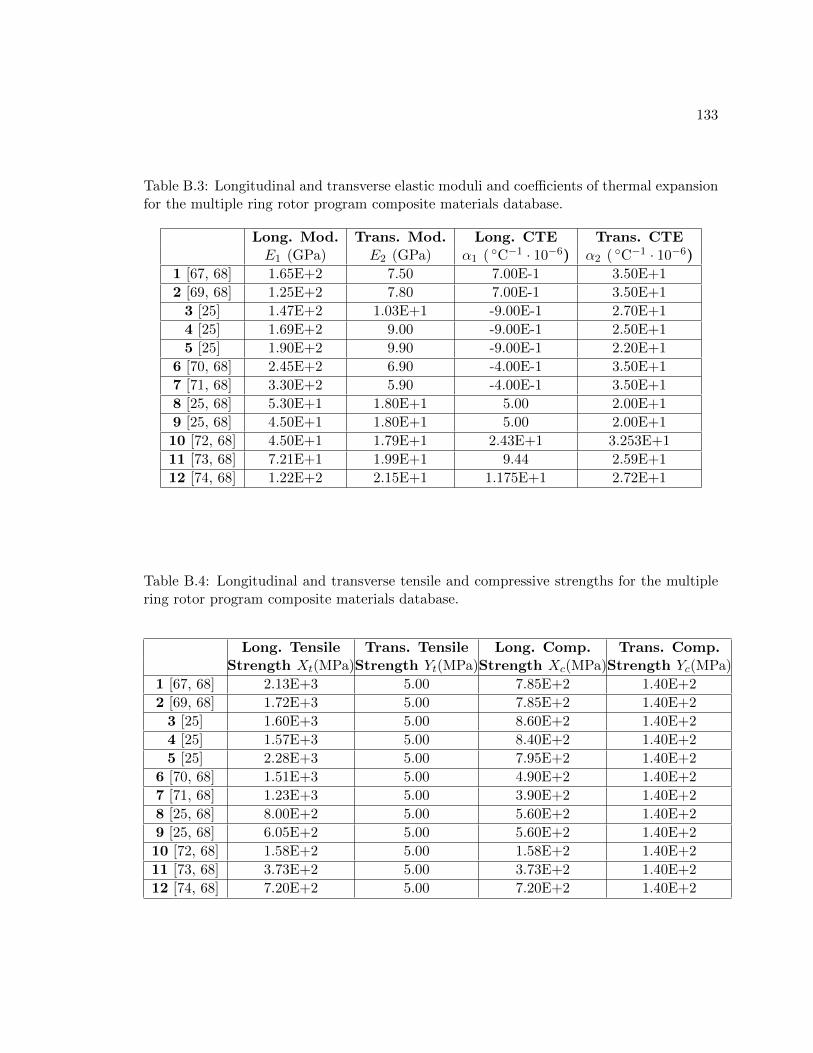
133
Table B.3: Longitudinal and transverse elastic moduli and coefficients of thermal expansionfor the multiple ring rotor program composite materials database.
Long. Mod. Trans. Mod. Long. CTE Trans. CTEE1 (GPa) E2 (GPa) α1 ( ◦C−1 · 10−6) α2 ( ◦C−1 · 10−6)
1 [67, 68] 1.65E+2 7.50 7.00E-1 3.50E+1
2 [69, 68] 1.25E+2 7.80 7.00E-1 3.50E+1
3 [25] 1.47E+2 1.03E+1 -9.00E-1 2.70E+1
4 [25] 1.69E+2 9.00 -9.00E-1 2.50E+1
5 [25] 1.90E+2 9.90 -9.00E-1 2.20E+1
6 [70, 68] 2.45E+2 6.90 -4.00E-1 3.50E+1
7 [71, 68] 3.30E+2 5.90 -4.00E-1 3.50E+1
8 [25, 68] 5.30E+1 1.80E+1 5.00 2.00E+1
9 [25, 68] 4.50E+1 1.80E+1 5.00 2.00E+1
10 [72, 68] 4.50E+1 1.79E+1 2.43E+1 3.253E+1
11 [73, 68] 7.21E+1 1.99E+1 9.44 2.59E+1
12 [74, 68] 1.22E+2 2.15E+1 1.175E+1 2.72E+1
Table B.4: Longitudinal and transverse tensile and compressive strengths for the multiplering rotor program composite materials database.
Long. Tensile Trans. Tensile Long. Comp. Trans. Comp.Strength Xt(MPa)Strength Yt(MPa)Strength Xc(MPa)Strength Yc(MPa)
1 [67, 68] 2.13E+3 5.00 7.85E+2 1.40E+2
2 [69, 68] 1.72E+3 5.00 7.85E+2 1.40E+2
3 [25] 1.60E+3 5.00 8.60E+2 1.40E+2
4 [25] 1.57E+3 5.00 8.40E+2 1.40E+2
5 [25] 2.28E+3 5.00 7.95E+2 1.40E+2
6 [70, 68] 1.51E+3 5.00 4.90E+2 1.40E+2
7 [71, 68] 1.23E+3 5.00 3.90E+2 1.40E+2
8 [25, 68] 8.00E+2 5.00 5.60E+2 1.40E+2
9 [25, 68] 6.05E+2 5.00 5.60E+2 1.40E+2
10 [72, 68] 1.58E+2 5.00 1.58E+2 1.40E+2
11 [73, 68] 3.73E+2 5.00 3.73E+2 1.40E+2
12 [74, 68] 7.20E+2 5.00 7.20E+2 1.40E+2

134
Table B.5: Epoxy matrix density, Poisson’s ratios, elastic moduli, and coefficients of thermalexpansion for the multiple ring rotor program composite materials database.
Material LabelDensity Poisson’s Modulus CTE α2
ρ (g/cm3) Ratio νθr E1 (GPa) ( ◦C−1 · 10−6)
1 [68] SHELL-EPON9405,9470EPOXY 1.16 0.40 4.83 4.00E+1
2 [68] SHELL-EPON9405,9470EPOXY 1.16 0.40 4.83 4.00E+1
3 [25] 3501-6EPOXY 1.27 0.35 4.30 4.50E+1
4 [25] 3501-6EPOXY 1.27 0.35 4.30 4.50E+1
5 [25] 977-3EPOXY 1.28 0.35 3.70 4.00E+1
6 [68] SHELL-EPON9405,9470EPOXY 1.16 0.40 4.83 4.00E+1
7 [68] SHELL-EPON9405,9470EPOXY 1.16 0.40 4.83 4.00E+1
8 [68] SHELL-EPON9405,9470EPOXY 1.16 0.40 4.83 4.00E+1
9 [68] SHELL-EPON9405,9470EPOXY 1.16 0.40 4.83 4.00E+1
10 [68] SHELL-EPON9405,9470EPOXY 1.16 0.40 4.83 4.00E+1
11 [68] SHELL-EPON9405,9470EPOXY 1.16 0.40 4.83 4.00E+1
12 [68] SHELL-EPON9405,9470EPOXY 1.16 0.40 4.83 4.00E+1
Table B.6: Ballast material density, Poisson’s Ratios, elastic moduli, and coefficients ofthermal expansion for the multiple ring rotor program composite materials database.
Material LabelDensity Poisson’s Modulus CTE α2
ρ (g/cm3) Ratio νθr E1 (GPa) ( ◦C−1 · 10−6)
1 [25] S-2 Glass 2.460 0.23 8.69E+1 1.60
2 [75] BoronCarbide 2.500 0.17 4.60E+2 5.60
3 [76] SiliconCarbide 3.100 0.14 4.10E+2 3.90
4 [77] AluminumOxide 3.900 0.22 3.40E+2 8.10
5 [78] TitaniumCarbide 4.940 0.185 4.49E+2 7.70
6 [79] ZirconiumCarbide 6.560 0.20 3.95E+2 7.00
7 [80] PureIron 7.874 0.29 2.11E+2 1.18E+1
8 [81] PureLead 1.134E+1 0.44 1.60E+1 2.89E+1
9 [82] TantalumCarbide 1.430E+1 0.24 4.82E+2 6.30
10 [83] TungstenCarbide 1.570E+1 0.24 6.83E+2 6.25

Appendix C
Composite Material Models
The composite material database given in Appendix B provides both composite and stand-
alone epoxy material information. With these models and material information concerning
the epoxy resin and unidirectional composite, the equivalent fiber properties can be back
calculated for determining composite information of an arbitrary fiber volume fraction. The
epoxy material information is also needed to calculate the new modified matrix material
that incorporates ballasting interstitial particles. If the two-fiber co-mingling design option
is used, the properties of both fibers as well as the epoxy material are used in modified
micromechanics models. Last, if there are stacked radial and hoop plies, then a stiffness
matrix for the multi-ply laminate is constructed. Material models are derived from many
references [25, 50, 52, 51].
C.1 Preliminary Calculation Models
This section calculates the equivalent fiber properties for the given composite and epoxy
database information. It includes the fiber density ρf , longitudinal modulus Ef1 , Poisson’s
ratio νf12, transverse modulus Ef2 , longitudinal tensile strength F fT , matrix shear modulus
Gm, fiber longitudinal coefficient of thermal expansion αf1 , and the transverse coefficient of
thermal expansion αf2 [25]. For the transverse tensile strengths YT , flywheel testing data
135

136
shows that they are significantly lower than predicted, usually resulting in premature failure.
Therefore, an an engineering estimate is used for all composites as shown in Table B.4. For
the transverse modulus E2, the Halpin-Tsai semi-empirical model is used with ξT = 1.68.
This factor was determined by performing a least-squares fit transverse modulus data for
glass-fiber composites of various fiber volume fractions given Figure 9.5 in the book by Tsai
in [51]. These properties are calculated according to Equations C.1 through C.8.
ρf =ρ− ρmV m
V f(C.1)
Ef1 =E1 − EmV m
V f(C.2)
νf12 =ν12 − νmV m
V f(C.3)
Ef2 =(Em)2 ξT
(V f − 1
)+ E2E
m(V f + ξT
)E2 (V f − 1) + Em (V fξT + 1)
(C.4)
F fT ≈XTE
f1
Ef1Vf + EmV m
(C.5)
Gm ≈ XCVm (C.6)
αf1 =α1
(Ef1V
f + EmV m)− EmαmV m
Ef1Vf
(C.7)
αf2 =1
V f
[α2 − νf12α
f1V
f − αmV m (1 + νm) +(νf12V
f + α1νmV m
)](C.8)

137
C.2 Ballast Calculations
If ballast material is used, the next step after the preliminary calculations would be to
calculate the density, elastic modulus, Poisson’s ratio, and thermal coefficient of expansion
for the new matrix material. For the density, the rule of mixtures is used. For the elastic
modulus and he Poisson’s ratio, the article by Christensen is used [52]. In this article,
the elastic modulus and Poisson’s ratio are calculated first by calculating the bulk and
shear modulus. The book by Christensen is used for the thermal coefficient of expansion
[50]. Note that both V b and V e are given as volume fractions of the matrix material V m.
Therefore, the ballast fraction of the entire composite material is V b · V m. Calculations for
these properties are given in Equations C.9 through C.24.
ρm = ρbV b + ρeV e (C.9)
Ke =Ee
3 (1− 2νe)(C.10)
Kb =Eb
3 (1− 2νb)(C.11)
Ge =Ee
2 (1 + νe)(C.12)
Gb =Eb
2 (1 + νb)(C.13)
Km = Ke +V b(Kb −Ke
)1 + (1− V b)
Kb −Ke
Ke + 43G
e
(C.14)
η1 =
(Gb
Ge− 1
)(7− 10νe)
(7 + 5νb
)+ 105
(νb − νe
)(C.15)

138
η2 =
(Gb
Ge− 1
)(7 + 5νb
)+ 35
(1− νb
)(C.16)
η3 =
(Gb
Ge− 1
)(8− 10νe) + 15 (1− νe) (C.17)
A = 8
(Gb
Ge− 1
)(4− 5νe) η1
(V b) 10
3 − 2
[63
(Gb
Ge− 1
)η2 + 2η1η3
](V b) 7
3
+ 252
(Gb
Ge− 1
)η2
(V b) 5
3 − 50
(Gb
Ge− 1
)[7− 12νe + 8 (νe)2
]η2V
b
+ 4 (7− 10νe) η2η3 (C.18)
B = − 4
(Gb
Ge− 1
)(1− 5νe) η1
(V b) 10
3+ 4
[63
(Gb
Ge− 1
)η2 + 2η1η3
](V b) 7
3
− 504
(Gb
Ge− 1
)η2
(V b) 5
3+ 150
(Gb
Ge− 1
)(3− νe) νeη2V
b
+ 3 (15νe − 7) η2η3 (C.19)
C = 4
(Gb
Ge− 1
)(5νe − 7) η1
(V b) 10
3 − 2
[63
(Gb
Ge− 1
)η2 + 2η1η3
](V b) 7
3
+ 252
(Gb
Ge− 1
)η2
(V b) 5
3+ 25
(Gb
Ge− 1
)[(νe)2 − 7
]η2V
b
− (7 + 5νe) η2η3 (C.20)
Gm =Ge
2A
(−B +
√B2 − 4AC
)(C.21)
Em =9KmGm
3Km +Gm(C.22)
νm =3Km − 2Gm
2 (3Km +Gm)(C.23)
αm = αe +αb − αe(1
Kb− 1
Ke
) ( 1
Km− 1
Ke
)(C.24)

139
C.3 Single Fiber Calculations
For a single fiber composite, calculating the material properties for a composite of arbitrary
fiber volume fraction is simply the reverse of the pre-calculations, with the fiber volume
fractions set by the algorithm, or assigned to the default value of 65% if the fiber fraction is
not allowed to vary [25]. To maintain consistency in the models used, the following factor
remains the same: ξT = 1.68.
ρ = ρfV f + ρmV m (C.25)
E1 = Ef1Vf + EmV m (C.26)
ν12 = νf12Vf + νmV m (C.27)
ηT =Ef2 − Em
Ef2 + ξTEm(C.28)
E2 = Em(
1 + ξT ηTVf
1− ξTV f
)(C.29)
XT ≈ F fT
(V f + V mE
m
Ef1
)(C.30)
XC ≈Gm
V m(C.31)
α1 =αf1E
f1V
f + αmEmV m
Ef1Vf + EmV m
(C.32)
α2 = αf2Vf
(1 + νf12
αf1
αf2
)+ αmV m (1 + νm)− α1
(νf12V
f + νmV m)
(C.33)

140
Q =
[Qθθ QθrQrθ Qrr
]=
1
E1−ν12
E1
−ν12
E1
1
E2
−1
(C.34)
α =
(αθαr
)=
(α1
α2
)(C.35)
C.4 Two-Fiber Calculations
For the fiber co-mingling model, two fibers are used. The preliminary calculation values
are used to compute hybrid composite values using modified micro-mechanical models. For
the density, longitudinal modulus, and Poisson’s ratio; the rule of mixtures is used. For
the transverse modulus, an expanded version of the Halpin-Tsai equations is used, except
that the transverse fiber modulus is replaced by a series spring model of the two fibers [25].
Because the two fiber composites used may include different matrix materials, the matrix
properties of the two composite materials m1 and m2 must be averaged in addition to the
fiber properties f1 and f2. Note that for Equation C.44, the first fiber is assumed to have
the lowest strain to failure.
ρm =ρm1V f1 + ρm2V f2
V f1 + V f2(C.36)
ρ = ρf1V f1 + ρf2V f2 + ρmV m (C.37)
Em =Em1V f1 + Em2V f2
V f1 + V f2(C.38)
E1 = Ef11 V f1 + Ef2
1 V f2 + EmV m (C.39)
νm =νm1V f1 + νm2V f2
V f1 + V f2(C.40)

141
ν12 = νf112V
f1 + νf212V
f2 + νmV m (C.41)
Ef2 =Ef1
2 Ef22
(V f1 + V f2
)Ef1
2 V f2 + Ef22 V f1
(C.42)
E2 = Em
[1 + ξT ηT
(V f1 + V f2
)1− ηT (V f1 + V f2)
](C.43)
XT ≈ F f1T
(V f1 + V f2E
f2
Ef1+ V m E
m
Ef1
)(C.44)
XC ≈Gm1V f1 +Gm2V f2
V m (V f1 + V f2)(C.45)
αm =αm1V f1 + αm2V f2
V f1 + V f2(C.46)
α1 =αf1
1 Ef11 V f1 + αf2
1 Ef21 V f2 + αmEmV m
Ef11 V f1 + Ef2
1 V f2 + EmV m(C.47)
α2 = V f1(αf1
2 + νf112α
f11
)+ V f2
(αf2
2 + νf212α
f21
)+αmV m (1 + νm)− α1
(νf1
12Vf1 + νf2
12Vf2 + νmV m
)(C.48)
C.5 Two-Ply Laminate Calculations
This multi-ply laminate analysis is derived from the book by Daniel & Ishai [25]. However,
it is highly simplified compared to the book calculation procedures. This is due to the fact
that the laminate model is designed for a symmetric, balanced laminate with an overall
laminate thickness set to unity, h = 1. For these calculations, the radial volume fraction Vr
of the total laminate thickness is needed.

142
Q =
1
E1−ν12
E1
−ν12
E1
1
E2
−1
(1− Vr) +
1
E2−ν12
E1
−ν12
E1
1
E1
−1
(Vr) (C.49)
α =
Qθθ Qθr
Qrθ Qrr
−1 α1
α2
1
E1−ν12
E1
−ν12
E1
1
E2
−1
(1− Vr)
+
α2
α1
1
E2−ν12
E1
−ν12
E1
1
E1
−1
(Vr)
(C.50)

Appendix D
Multiple Ring Rotor Optimization
Program Results
The results shown in this appendix represent the best results after thousands of optimiza-
tion runs for each data point. For the objective/constraint combinations that are considered
completely valid shown in Sections D.1, D.3, and D.4; 75,000 optimization runs were per-
formed. For the objective/constraint combination that is considered conditionally valid is
shown in Section D.2; 35,000 optimization runs were performed because of the generation
of non-reasonable results. For each run, anywhere from 1,000 functional evaluations for
low search dimension cases to the upper limit of 200,000 were made. For Tables D.1, D.2,
D.3, and D.4; the gray shaded listings indicate solutions that did not converge, indicating a
low probability that the global optimum was found. In all cases, a processing temperature
change of ∆T = −110 ◦C was used to include temperature-related residual stresses.
143

144
D.1
Tota
lS
tore
dE
nerg
y,
Fix
ed
Rad
ii
Tab
leD
.1:
En
ergy
obje
ctiv
ew
ith
both
rad
iifi
xed
at10
0m
man
d25
0m
m.
Bes
tre
sult
saf
ter
75,0
00
op
tim
izati
on
run
s.G
ray
shad
ing
ind
icate
sco
nve
rgen
cefa
ilu
re.
Un
its
are
inkW·h
.
# o
f R
ings
E-I
O-0
-11
0E
-IO
-A-1
10
E-I
O-B
-110
E-I
O-C
-110
E-I
O-D
-11
0E
-IO
-E-1
10
11.5
2E
-01
2.6
9E
-01
9.1
0E
-13
1.5
2E
-01
1.5
2E
-01
3.6
8E
-01
21.3
9E
+00
1.3
9E
+00
9.3
3E
-13
1.4
5E
+00
2.6
9E
+00
1.7
8E
+00
31.7
1E
+00
1.7
1E
+00
9.2
9E
-13
1.7
4E
+00
1.2
7E
+01
2.2
4E
+00
E-I
O-A
B-1
10
E-I
O-A
C-1
10
E-I
O-A
D-1
10
E-I
O-A
E-1
10
E-I
O-B
C-1
10
E-I
O-B
D-1
10
E-I
O-B
E-1
10
E-I
O-C
D-1
10
E-I
O-C
E-1
10
E-I
O-D
E-1
10
11.1
3E
-01
3.7
4E
-01
2.6
9E
-01
3.8
7E
-01
9.1
0E
-13
9.1
0E
-13
9.0
1E
-02
1.5
2E
-01
3.6
8E
-01
3.6
8E
-01
21.1
6E
-01
1.4
5E
+00
2.6
9E
+00
2.3
6E
+00
9.3
3E
-13
9.3
5E
-13
8.9
5E
-02
2.7
2E
+00
1.8
7E
+00
3.5
4E
+00
31.1
5E
-01
1.7
4E
+00
1.2
9E
+01
3.6
2E
+00
9.3
2E
-13
9.1
2E
-13
8.1
5E
-02
1.3
2E
+01
2.2
9E
+00
1.8
6E
+01
E-I
O-A
BC
-110
E-I
O-A
BD
-110
E-I
O-A
BE
-110
E-I
O-A
CD
-110
E-I
O-A
CE
-110
E-I
O-A
DE
-110
E-I
O-B
CD
-11
0E
-IO
-BC
E-1
10
E-I
O-B
DE
-110
E-I
O-C
DE
-110
11.1
3E
-01
1.1
3E
-01
1.2
6E
-01
3.7
4E
-01
4.2
5E
-01
3.8
7E
-01
9.1
0E
-13
9.0
2E
-02
9.0
1E
-02
3.6
8E
-01
21.1
6E
-01
1.1
6E
-01
1.3
1E
-01
2.6
9E
+00
2.9
7E
+00
2.9
7E
+00
9.2
8E
-13
9.0
3E
-02
8.8
9E
-02
3.7
3E
+00
31.1
6E
-01
1.1
6E
-01
1.3
0E
-01
1.8
0E
+00
4.5
5E
+00
2.3
0E
+01
8.3
8E
-13
8.7
6E
-02
3.1
9E
-02
1.3
5E
+01
E-I
O-A
BC
DE
-110
E-I
O-A
BC
D-1
10
E-I
O-A
BC
E-1
10
E-I
O-A
BD
E-1
10
E-I
O-A
CD
E-1
10
E-I
O-B
CD
E-1
10
11.2
6E
-01
1.1
3E
-01
1.2
6E
-01
1.2
6E
-01
4.2
5E
-01
9.0
2E
-02
21.3
6E
-01
1.1
6E
-01
1.3
4E
-01
1.3
5E
-01
2.9
8E
+00
8.8
8E
-02
31.2
8E
-01
1.1
7E
-01
1.3
0E
-01
1.2
9E
-01
4.4
9E
+00
3.4
1E
-04

145
0
5
10
15
20
25
30
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
O-0
-11
0
E-I
O-A
-11
0
E-I
O-B
-11
0
E-I
O-C
-11
0
E-I
O-D
-11
0
E-I
O-E
-11
0
Fig
ure
D.1
:E
ner
gy
ob
ject
ive
wit
hb
oth
rad
iifi
xed
at10
0m
man
d25
0m
m.
Incl
ud
esze
roan
don
ed
esig
nop
tion
sele
cted
.

146
0
5
10
15
20
25
30
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
O-A
B-1
10
E-I
O-A
C-1
10
E-I
O-A
D-1
10
E-I
O-A
E-1
10
E-I
O-B
C-1
10
E-I
O-B
D-1
10
E-I
O-B
E-1
10
E-I
O-C
D-1
10
E-I
O-C
E-1
10
E-I
O-D
E-1
10
Fig
ure
D.2
:E
ner
gyob
ject
ive
wit
hb
oth
rad
iifixed
at10
0m
man
d25
0m
m.
Incl
ud
estw
od
esig
nop
tion
sse
lect
ed.

147
0
5
10
15
20
25
30
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
O-A
BC
-11
0
E-I
O-A
BD
-11
0
E-I
O-A
BE
-11
0
E-I
O-A
CD
-11
0
E-I
O-A
CE
-11
0
E-I
O-A
DE
-11
0
E-I
O-B
CD
-11
0
E-I
O-B
CE
-11
0
E-I
O-B
DE
-11
0
E-I
O-C
DE
-11
0
Fig
ure
D.3
:E
ner
gyob
ject
ive
wit
hb
oth
rad
iifi
xed
at10
0m
man
d25
0m
m.
Incl
ud
esth
ree
des
ign
op
tion
sse
lect
ed.

148
0
5
10
15
20
25
30
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
O-A
BC
DE
-11
0
E-I
O-A
BC
D-1
10
E-I
O-A
BC
E-1
10
E-I
O-A
BD
E-1
10
E-I
O-A
CD
E-1
10
E-I
O-B
CD
E-1
10
Fig
ure
D.4
:E
ner
gyob
ject
ive
wit
hb
oth
rad
iifi
xed
at10
0m
man
d25
0m
m.
Incl
ud
esfo
ur
and
all
five
des
ign
op
tion
sse
lect
ed.

149
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
O-0
-11
0
E-I
O-A
-11
0
E-I
O-C
-11
0
E-I
O-E
-11
0
E-I
O-A
C-1
10
E-I
O-A
E-1
10
E-I
O-C
E-1
10
E-I
O-A
CE
-11
0
Fig
ure
D.5
:E
ner
gyob
ject
ive
wit
hb
oth
radii
fixed
at10
0m
man
d25
0m
m.
Incl
ud
esal
lth
ed
esig
nop
tion
sex
cep
tfo
rd
esig
nop
tion
s(B
)an
d(D
).

150
D.2
Tota
lS
tore
dE
nerg
y,
Fix
ed
Inn
er
Rad
ius
Tab
leD
.2:
En
ergy
obje
ctiv
ew
ith
the
inn
erra
diu
sfi
xed
at10
0m
m.
Bes
tre
sult
saf
ter
35,0
00
op
tim
izati
on
run
s.G
ray
shad
ing
ind
icat
esco
nve
rgen
cefa
ilu
re.
Un
its
are
inkW·h
.
# o
f R
ings
E-I
-0-1
10
E-I
-A-1
10
E-I
-B-1
10
E-I
-C-1
10
E-I
-D-1
10
E-I
-E-1
10
11.3
4E
+00
5.1
3E
+05
1.1
9E
-04
1.3
9E
+00
1.3
4E
+00
1.3
6E
+00
25.6
9E
+00
4.0
8E
+05
1.0
3E
-04
5.9
5E
+00
8.9
1E
+00
2.9
2E
+02
36.2
4E
+00
2.8
3E
+05
1.0
3E
-04
7.4
3E
+00
1.8
4E
+01
4.6
5E
+02
E-I
-AB
-110
E-I
-AC
-11
0E
-I-A
D-1
10
E-I
-AE
-110
E-I
-BC
-110
E-I
-BD
-110
E-I
-BE
-11
0E
-I-C
D-1
10
E-I
-CE
-11
0E
-I-D
E-1
10
11.0
1E
+07
8.2
0E
+05
5.3
5E
+05
5.2
8E
+05
1.4
9E
-04
1.1
6E
-04
9.8
3E
+05
1.3
9E
+00
3.4
6E
+01
6.6
9E
+00
23.8
8E
+06
4.3
7E
+05
3.4
8E
+05
2.5
7E
+05
6.5
9E
-05
4.7
0E
-05
1.5
3E
+06
9.5
3E
+00
2.7
8E
+02
2.4
8E
+01
38.7
9E
+05
3.3
5E
+03
2.0
4E
+05
3.6
2E
+04
1.8
2E
-05
1.8
8E
-05
9.4
4E
+04
1.8
0E
+01
3.1
2E
+02
1.8
6E
+02
E-I
-AB
C-1
10
E-I
-AB
D-1
10
E-I
-AB
E-1
10
E-I
-AC
D-1
10
E-I
-AC
E-1
10
E-I
-AD
E-1
10
E-I
-BC
D-1
10
E-I
-BC
E-1
10
E-I
-BD
E-1
10
E-I
-CD
E-1
10
14.2
7E
+06
5.2
6E
+06
2.9
0E
+06
7.2
3E
+05
3.8
3E
+05
5.2
8E
+05
1.4
9E
-04
7.1
7E
+06
9.8
3E
+05
3.4
6E
+01
23.8
9E
+06
4.0
4E
+06
8.3
0E
+05
3.2
5E
+05
2.6
1E
+04
2.5
3E
+05
4.7
3E
-05
1.6
5E
+06
5.8
5E
+05
1.9
8E
+01
34.7
9E
+04
9.9
3E
+05
1.5
0E
+04
7.6
7E
+04
8.5
6E
+02
3.5
6E
+04
1.5
6E
-06
3.7
4E
+05
3.6
4E
-05
1.1
0E
+02
E-I
-AB
CD
E-1
10
E-I
-AB
CD
-110
E-I
-AB
CE
-11
0E
-I-A
BD
E-1
10
E-I
-AC
DE
-11
0E
-I-B
CD
E-1
10
11.8
5E
+06
4.2
7E
+06
1.8
5E
+06
2.9
0E
+06
3.8
6E
+05
5.0
3E
+06
22.5
3E
+05
1.0
4E
+06
2.5
3E
+05
9.8
9E
+05
1.4
9E
+05
1.8
6E
+01
34.0
6E
+02
5.2
3E
+05
4.0
6E
+02
7.0
8E
+05
8.9
0E
+02
2.6
1E
-14

151
1.E
-04
1.E
-03
1.E
-02
1.E
-01
1.E
+00
1.E
+01
1.E
+02
1.E
+03
1.E
+04
1.E
+05
1.E
+06
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
-0-1
10
E-I
-A-1
10
E-I
-B-1
10
E-I
-C-1
10
E-I
-D-1
10
E-I
-E-1
10
Fig
ure
D.6
:E
ner
gyob
ject
ive
wit
hth
ein
ner
rad
ius
fixed
at10
0m
m.
Incl
ud
esze
roan
don
ed
esig
nop
tion
sele
cted
.

152
1.E
-05
1.E
-04
1.E
-03
1.E
-02
1.E
-01
1.E
+00
1.E
+01
1.E
+02
1.E
+03
1.E
+04
1.E
+05
1.E
+06
1.E
+07
1.E
+08
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
-AB
-11
0
E-I
-AC
-11
0
E-I
-AD
-11
0
E-I
-AE
-11
0
E-I
-BC
-11
0
E-I
-BD
-11
0
E-I
-BE
-11
0
E-I
-CD
-11
0
E-I
-CE
-11
0
E-I
-DE
-11
0
Fig
ure
D.7
:E
ner
gyob
ject
ive
wit
hth
ein
ner
rad
ius
fixed
at10
0m
m.
Incl
ud
estw
od
esig
nop
tion
sse
lect
ed.

153
1.E
-06
1.E
-05
1.E
-04
1.E
-03
1.E
-02
1.E
-01
1.E
+00
1.E
+01
1.E
+02
1.E
+03
1.E
+04
1.E
+05
1.E
+06
1.E
+07
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
-AB
C-1
10
E-I
-AB
D-1
10
E-I
-AB
E-1
10
E-I
-AC
D-1
10
E-I
-AC
E-1
10
E-I
-AD
E-1
10
E-I
-BC
D-1
10
E-I
-BC
E-1
10
E-I
-BD
E-1
10
E-I
-CD
E-1
10
Fig
ure
D.8
:E
ner
gyob
ject
ive
wit
hth
ein
ner
rad
ius
fixed
at10
0m
m.
Incl
ud
esth
ree
des
ign
opti
on
sse
lect
ed.

154
1.E
-14
1.E
-13
1.E
-12
1.E
-11
1.E
-10
1.E
-09
1.E
-08
1.E
-07
1.E
-06
1.E
-05
1.E
-04
1.E
-03
1.E
-02
1.E
-01
1.E
+00
1.E
+01
1.E
+02
1.E
+03
1.E
+04
1.E
+05
1.E
+06
1.E
+07
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
-AB
CD
E-1
10
E-I
-AB
CD
-11
0
E-I
-AB
CE
-11
0
E-I
-AB
DE
-11
0
E-I
-AC
DE
-11
0
E-I
-BC
DE
-11
0
Fig
ure
D.9
:E
ner
gy
ob
ject
ive
wit
hth
ein
ner
rad
ius
fixed
at10
0m
m.
Incl
ud
esfo
ur
and
all
five
des
ign
op
tion
sse
lect
ed.

155
1.E
+00
1.E
+01
1.E
+02
1.E
+03
1.E
+04
1.E
+05
1.E
+06
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-I
-0-1
10
E-I
-A-1
10
E-I
-C-1
10
E-I
-E-1
10
E-I
-AC
-11
0
E-I
-AE
-11
0
E-I
-CE
-11
0
E-I
-AC
E-1
10
Fig
ure
D.1
0:
En
ergy
obje
ctiv
ew
ith
the
inner
rad
ius
fixed
at10
0m
m.
Incl
ud
esal
lth
ed
esig
nop
tion
sex
cep
tfo
rd
esig
nop
tions
(B)
an
d(D
).

156
D.3
Tota
lS
tore
dE
nerg
y,
Fix
ed
Ou
ter
Rad
ius
Tab
leD
.3:
En
ergy
obje
ctiv
ew
ith
the
oute
rra
diu
sfi
xed
at25
0m
m.
Bes
tre
sult
saf
ter
75,0
00
op
tim
izati
on
run
s.G
ray
shad
ing
ind
icat
esco
nve
rgen
cefa
ilu
re.
Un
its
are
inkW·h
.
# o
f R
ings
E-O
-0-1
10
E-O
-A-1
10
E-O
-B-1
10
E-O
-C-1
10
E-O
-D-1
10
E-O
-E-1
10
17.1
4E
+00
7.1
4E
+00
9.5
9E
-13
7.4
3E
+00
7.1
4E
+00
7.2
4E
+00
21.9
7E
+01
1.9
7E
+01
1.0
2E
-12
1.9
7E
+01
2.2
3E
+01
2.1
6E
+01
31.9
8E
+01
1.9
8E
+01
1.0
5E
-12
2.1
5E
+01
2.5
0E
+01
2.4
5E
+01
E-O
-AB
-11
0E
-O-A
C-1
10
E-O
-AD
-110
E-O
-AE
-11
0E
-O-B
C-1
10
E-O
-BD
-110
E-O
-BE
-110
E-O
-CD
-11
0E
-O-C
E-1
10
E-O
-DE
-110
11.1
8E
-01
7.4
3E
+00
7.1
4E
+00
7.2
4E
+00
9.5
9E
-13
9.5
9E
-13
9.5
0E
-02
7.4
3E
+00
7.5
2E
+00
7.2
4E
+00
21.2
7E
-01
1.9
7E
+01
2.1
6E
+01
2.1
9E
+01
1.0
2E
-12
1.0
3E
-12
9.7
4E
-02
2.2
6E
+01
2.2
1E
+01
2.1
8E
+01
31.3
0E
-01
2.1
5E
+01
2.0
0E
+01
2.4
8E
+01
9.9
3E
-13
1.0
3E
-12
9.1
3E
-02
2.5
2E
+01
2.6
2E
+01
2.4
5E
+01
E-O
-AB
C-1
10
E-O
-AB
D-1
10
E-O
-AB
E-1
10
E-O
-AC
D-1
10
E-O
-AC
E-1
10
E-O
-AD
E-1
10
E-O
-BC
D-1
10
E-O
-BC
E-1
10
E-O
-BD
E-1
10
E-O
-CD
E-1
10
11.2
0E
-01
1.1
9E
-01
1.7
4E
-01
7.4
3E
+00
7.5
2E
+00
7.2
4E
+00
9.5
9E
-13
9.5
0E
-02
9.5
0E
-02
7.5
2E
+00
21.2
8E
-01
1.2
7E
-01
1.9
4E
-01
2.0
6E
+01
2.2
1E
+01
2.1
9E
+01
1.0
3E
-12
9.5
2E
-02
9.5
1E
-02
2.2
3E
+01
31.3
0E
-01
1.3
1E
-01
1.9
5E
-01
2.1
5E
+01
2.6
2E
+01
2.4
9E
+01
9.6
1E
-13
8.3
3E
-02
9.1
0E
-02
2.6
3E
+01
E-O
-AB
CD
E-1
10
E-O
-AB
CD
-110
E-O
-AB
CE
-110
E-O
-AB
DE
-110
E-O
-AC
DE
-11
0E
-O-B
CD
E-1
10
11.7
7E
-01
1.2
0E
-01
1.7
7E
-01
1.7
4E
-01
7.5
2E
+00
9.5
0E
-02
21.9
7E
-01
1.2
8E
-01
1.9
8E
-01
1.8
4E
-01
2.2
1E
+01
9.2
7E
-02
31.9
5E
-01
1.3
1E
-01
1.8
6E
-01
1.8
9E
-01
2.5
9E
+01
6.1
5E
-16

157
0
5
10
15
20
25
30
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-O
-0-1
10
E-O
-A-1
10
E-O
-B-1
10
E-O
-C-1
10
E-O
-D-1
10
E-O
-E-1
10
Fig
ure
D.1
1:E
ner
gyob
ject
ive
wit
hth
eou
ter
rad
ius
fixed
at25
0m
m.
Incl
ud
esze
roan
done
des
ign
op
tion
sele
cted
.

158
0
5
10
15
20
25
30
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-O
-AB
-11
0
E-O
-AC
-11
0
E-O
-AD
-11
0
E-O
-AE
-11
0
E-O
-BC
-11
0
E-O
-BD
-11
0
E-O
-BE
-11
0
E-O
-CD
-11
0
E-O
-CE
-11
0
E-O
-DE
-11
0
Fig
ure
D.1
2:
En
ergy
ob
ject
ive
wit
hth
eou
ter
rad
ius
fixed
at25
0m
m.
Incl
ud
estw
od
esig
nop
tion
sse
lect
ed.

159
0
5
10
15
20
25
30
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-O
-AB
C-1
10
E-O
-AB
D-1
10
E-O
-AB
E-1
10
E-O
-AC
D-1
10
E-O
-AC
E-1
10
E-O
-AD
E-1
10
E-O
-BC
D-1
10
E-O
-BC
E-1
10
E-O
-BD
E-1
10
E-O
-CD
E-1
10
Fig
ure
D.1
3:
En
ergy
ob
ject
ive
wit
hth
eou
ter
rad
ius
fixed
at25
0m
m.
Incl
udes
thre
ed
esig
nop
tion
sse
lect
ed.

160
0
5
10
15
20
25
30
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-O
-AB
CD
E-1
10
E-O
-AB
CD
-11
0
E-O
-AB
CE
-11
0
E-O
-AB
DE
-11
0
E-O
-AC
DE
-11
0
E-O
-BC
DE
-11
0
Fig
ure
D.1
4:E
ner
gyob
ject
ive
wit
hth
eou
ter
rad
ius
fixed
at25
0m
m.
Incl
udes
fou
ran
dal
lfi
ved
esig
nop
tion
sse
lect
ed.

161
0
5
10
15
20
25
30
0
1
2
3
4
Energy (kW-h)
Nu
mb
er o
f R
ing
s
E-O
-0-1
10
E-O
-A-1
10
E-O
-C-1
10
E-O
-E-1
10
E-O
-AC
-11
0
E-O
-AE
-11
0
E-O
-CE
-11
0
E-O
-AC
E-1
10
Fig
ure
D.1
5:
En
ergy
obje
ctiv
ew
ith
the
oute
rra
diu
sfi
xed
at25
0m
m.
Incl
ud
esal
lth
ed
esig
nop
tion
sex
cep
tfo
rd
esig
nop
tion
s(B
)an
d(D
).

162
D.4
Sp
eci
fic
En
erg
y,
Fix
ed
Rad
ii
Tab
leD
.4:
Sp
ecifi
cen
ergy
obje
ctiv
ew
ith
bot
hra
dii
fixed
at10
0m
man
d25
0m
m.
Bes
tre
sult
saf
ter
75,0
00
op
tim
izati
on
run
s.G
ray
shad
ing
ind
icat
esco
nver
gen
cefa
ilu
re.
# o
f R
ings
S-I
O-0
-110
S-I
O-A
-110
S-I
O-B
-11
0S
-IO
-C-1
10
S-I
O-D
-110
S-I
O-E
-110
14.1
2E
-01
1.2
8E
+00
2.4
7E
-12
4.1
2E
-01
4.1
2E
-01
9.5
2E
-01
23.8
7E
+00
3.8
7E
+00
2.5
3E
-12
4.0
3E
+00
5.5
4E
+00
4.2
6E
+00
33.9
4E
+00
4.4
4E
+00
2.5
5E
-12
4.1
0E
+00
4.3
4E
+01
4.3
9E
+00
S-I
O-A
B-1
10
S-I
O-A
C-1
10
S-I
O-A
D-1
10
S-I
O-A
E-1
10
S-I
O-B
C-1
10
S-I
O-B
D-1
10
S-I
O-B
E-1
10
S-I
O-C
D-1
10
S-I
O-C
E-1
10
S-I
O-D
E-1
10
15.4
2E
-01
1.8
0E
+00
1.2
8E
+00
1.3
8E
+00
2.4
7E
-12
2.4
7E
-12
2.3
3E
-01
4.1
2E
-01
9.5
2E
-01
9.5
2E
-01
25.5
6E
-01
4.0
3E
+00
5.5
8E
+00
4.4
9E
+00
2.5
3E
-12
2.5
4E
-12
2.3
5E
-01
6.5
0E
+00
4.4
5E
+00
8.6
0E
+00
35.5
9E
-01
4.7
4E
+00
4.8
1E
+01
5.5
6E
+00
2.4
6E
-12
2.5
5E
-12
1.7
8E
-01
4.4
3E
+01
4.6
6E
+00
5.3
4E
+01
S-I
O-A
BC
-11
0S
-IO
-AB
D-1
10
S-I
O-A
BE
-110
S-I
O-A
CD
-110
S-I
O-A
CE
-11
0S
-IO
-AD
E-1
10
S-I
O-B
CD
-11
0S
-IO
-BC
E-1
10
S-I
O-B
DE
-11
0S
-IO
-CD
E-1
10
15.4
7E
-01
5.4
2E
-01
5.7
7E
-01
1.8
0E
+00
1.8
0E
+00
1.3
8E
+00
2.4
7E
-12
2.3
3E
-01
2.3
3E
-01
9.5
2E
-01
25.6
0E
-01
5.5
7E
-01
5.7
7E
-01
6.4
8E
+00
5.7
9E
+00
4.4
9E
+00
2.5
4E
-12
2.3
4E
-01
2.3
4E
-01
1.0
1E
+01
35.6
0E
-01
5.6
1E
-01
5.7
5E
-01
4.9
1E
+00
8.5
3E
+00
1.6
2E
+01
2.4
0E
-12
2.1
9E
-01
8.6
0E
-02
5.0
6E
+01
S-I
O-A
BC
DE
-11
0S
-IO
-AB
CD
-11
0S
-IO
-AB
CE
-11
0S
-IO
-AB
DE
-110
S-I
O-A
CD
E-1
10
S-I
O-B
CD
E-1
10
15.8
5E
-01
5.4
7E
-01
5.8
5E
-01
5.7
7E
-01
1.8
0E
+00
2.3
3E
-01
25.8
5E
-01
5.6
1E
-01
5.8
5E
-01
5.8
0E
-01
5.8
1E
+00
2.3
0E
-01
35.7
7E
-01
5.5
9E
-01
5.8
5E
-01
5.6
3E
-01
8.3
6E
+00
1.7
6E
-01

163
0
10
20
30
40
50
0
1
2
3
4
Specific Energy (W-h/kg)
Nu
mb
er o
f R
ing
s
S-I
O-0
-11
0
S-I
O-A
-11
0
S-I
O-B
-11
0
S-I
O-C
-11
0
S-I
O-D
-11
0
S-I
O-E
-11
0
Fig
ure
D.1
6:
Sp
ecifi
cen
ergy
obje
ctiv
ew
ith
bot
hra
dii
fixed
at10
0m
man
d25
0m
m.
Incl
ud
esze
roan
don
ed
esig
nop
tion
sele
cted
.U
nit
sar
ein
W·h
/kg.

164
0
10
20
30
40
50
0
1
2
3
4
Specific Energy (W-h/kg)
Nu
mb
er o
f R
ing
s
S-I
O-A
B-1
10
S-I
O-A
C-1
10
S-I
O-A
D-1
10
S-I
O-A
E-1
10
S-I
O-B
C-1
10
S-I
O-B
D-1
10
S-I
O-B
E-1
10
S-I
O-C
D-1
10
S-I
O-C
E-1
10
S-I
O-D
E-1
10
Fig
ure
D.1
7:
Sp
ecifi
cen
ergy
obje
ctiv
ew
ith
bot
hra
dii
fixed
at10
0m
man
d25
0m
m.
Incl
ud
estw
od
esig
nop
tion
sse
lect
ed.

165
0
10
20
30
40
50
0
1
2
3
4
Specific Energy (W-h/kg)
Nu
mb
er o
f R
ing
s
S-I
O-A
BC
-11
0
S-I
O-A
BD
-11
0
S-I
O-A
BE
-11
0
S-I
O-A
CD
-11
0
S-I
O-A
CE
-11
0
S-I
O-A
DE
-11
0
S-I
O-B
CD
-11
0
S-I
O-B
CE
-11
0
S-I
O-B
DE
-11
0
S-I
O-C
DE
-11
0
Fig
ure
D.1
8:
Sp
ecifi
cen
ergy
obje
ctiv
ew
ith
bot
hra
dii
fixed
at10
0m
man
d25
0m
m.
Incl
ud
esth
ree
des
ign
op
tion
sse
lect
ed.

166
0
10
20
30
40
50
0
1
2
3
4
Specific Energy (W-h/kg)
Nu
mb
er o
f R
ing
s
S-I
O-A
BC
DE
-11
0
S-I
O-A
BC
D-1
10
S-I
O-A
BC
E-1
10
S-I
O-A
BD
E-1
10
S-I
O-A
CD
E-1
10
S-I
O-B
CD
E-1
10
Fig
ure
D.1
9:S
pec
ific
ener
gyob
ject
ive
wit
hb
oth
rad
iifi
xed
at10
0m
man
d25
0m
m.
Incl
ud
esfo
ur
an
dall
five
des
ign
op
tion
sse
lect
ed.

167
0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
Specific Energy (W-h/kg)
Nu
mb
er o
f R
ing
s
S-I
O-0
-11
0
S-I
O-A
-11
0
S-I
O-C
-11
0
S-I
O-E
-11
0
S-I
O-A
C-1
10
S-I
O-A
E-1
10
S-I
O-C
E-1
10
S-I
O-A
CE
-11
0
Fig
ure
D.2
0:
Sp
ecifi
cen
ergy
ob
ject
ive
wit
hb
oth
rad
iifi
xed
at10
0m
man
d25
0m
m.
Incl
ud
esall
the
des
ign
op
tion
sex
cep
tfo
rd
esig
nop
tion
s(B
)an
d(D
).

Appendix E
Nontechnical Abstract
Within the last century, energy storing flywheel rotor technology has begun to approach the
power and energy densities required for industrial and transportation applications due to the
development of fiber-reinforced composite materials. However, this technology has yet to be
fully optimized given the design possibilities. There have been many design approaches that
have been published over the years, but no overall comparisons of the many manufacturable
design options have been put forth. This research investigates some of these design options
for increasing flywheel rotor performance. It also increases understanding of how to set up a
proper optimization problem which avoids falling into various optimization traps that may
produce unrealistic results.
Of the design options investigated, some have shown very promising results. For flywheel
rotors with many material rings, press-fitting them together has been shown to produce
some of the best results. The second best design option investigated is matrix ballasting,
where high-density particles can be placed into the epoxy matrix of a composite material to
vary the material properties. Another good design option investigated is fiber co-mingling,
where two fibers of different properties are placed together to alter a composite material.
This research can point flywheel designers in the direction of the optimization strategy most
useful to their application.
168

RESIDENCE: 3432 Littleleaf Place Laurel, MD 20724 Mobile: (405) 473-3233
Jacob Wayne Ross [email protected]
OFFICE: 7 Research West Building University Park, PA 16802 Phone: (814) 865-2289
EDUCATION
Ph.D., Engineering Science & Mechanics 2009 – 2013 The Pennsylvania State University University Park, PA (GPA: 3.96)
M.S., Nuclear Engineering 2007 – 2009 The Pennsylvania State University University Park, PA (GPA: 4.0)
B.S., Physics 2003 – 2006 The Pennsylvania State University University Park, PA (GPA: 3.88)
B.S., Nuclear Engineering 2003 – 2006 The Pennsylvania State University University Park, PA (GPA: 3.88) A.S., Mathematics 1999 – 2002 Rose State College, OK (GPA: 4.00)
A.A.S., Computer Networking 1999 – 2002 Rose State College, OK (GPA: 4.00)
PROFESSIONAL EXPERIENCE
Composite Flywheel Energy Storage Optimization Researcher Pennsylvania State University 09/2009 – Present University Park, PA
Nine Mile Point Nuclear Fuel Services Engineer Constellation Energy Nuclear Group, LLC 05/2009 – 08/2009 Lycoming, NY
Nuclear Weapons Counter-Proliferation Target Analyst National Security Agency [DoD] 05/2008 – 08/2008 Fort George G. Meade, MD
Researcher: Lead Boiling Superheat Reactor (BSR) Design Engineer Pennsylvania State University 01/2008 – 05/2009 University Park, PA
Teaching Assistant: Department of Mechanical and Nuclear Engineering The Pennsylvania State University 08/2007 – 05/2009 University Park, PA � Fall 2007: Design Principles of Reactor Systems � Spring 2008 & 2009: Radiation Detection and Measurement � Fall 2008: Experiments in Reactor Physics
Nuclear Engineer: Core Thermal Hydraulic Analyst Westinghouse Electric Company 04/2007 – 08/2007 Monroeville, PA
Researcher: Two-Phase Flow Dynamics for Hydrogen Fuel Cells The Pennsylvania State University 05/2004 – 09/2005 University Park, PA