on implicit-factorization block preconditioners
DESCRIPTION
On implicit-factorization block preconditioners. Sue Dollar 1,2 , Nick Gould 3 , Wil Schilders 2,4 and Andy Wathen 1. 1 Oxford University Computing Laboratory, Oxford, UK 2 CASA, Technische Universiteit Eindhoven, The Netherlands 3 Rutherford Appleton Laboratory, Chilton, UK - PowerPoint PPT PresentationTRANSCRIPT

On implicit-factorization block preconditioners
Sue Dollar1,2, Nick Gould3,Wil Schilders2,4 and Andy Wathen1
1 Oxford University Computing Laboratory, Oxford, UK
2 CASA, Technische Universiteit Eindhoven, The Netherlands
3 Rutherford Appleton Laboratory, Chilton, UK
4 Philips Research Laboratory, Eindhoven, The Netherlands

Summary of the talk
• Introduction
• Direct versus Iterative Methods
• Preconditioned Conjugate Gradient Method
• Constraint Preconditioners
• Implicit Constraint Preconditioners
• Numerical Examples
• Future work and conclusions
Introduction
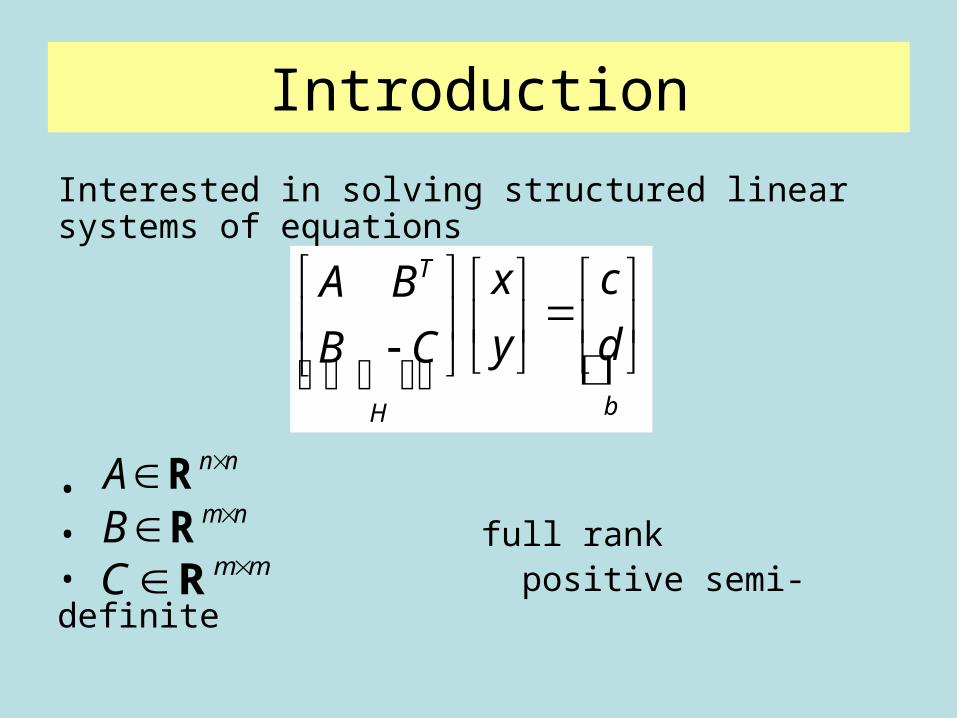
Interested in solving structured linear systems of equations
• • full rank• positive semi-definite
T
bH
x cA B
y dB C
n nA Rm nB Rm mC R

Example 1: Equality constrained minimization
Interior-point sub-problem
• • • Θ (small) barrier weights
First-order optimality
minimize ( ) subject to ( ) 0, 0nx
f x c x x
R
11minimize ( ) subject to
2n
T T
ss A s s g By c
R
( ), symmetric approximation to ( )x xxg f x A f x ( )xB c x
1
0
T s gA B
y cB

Factory
number of hours worked by person
hourly rate of pay for person
number of object that person makes each hour
number of object that need to be made each week
{ }, { }, { }
i
i
ji
j
i i ji
x i
c i
b j i
d j
x x c c B b
, { }jd d
min such that , 0T
xc x Bx d x

Example 2: Inequality constrained minimization
Interior-point sub-problem
• C (small) barrier weights
First-order optimality
1 11minimize ( ) ( )
2n
T T T T
ss A B C B s s g B C c
R
minimize ( ) subject to ( ) 0nx
f x c x
R
T s gA B
y cB C

Direct vs. Iterative Methods
• Direct methods– Gaussian elimination with a pivoting strategy
– Bunch-Parlett factorization
• Iterative methods– Krylov subspace methods
– MINRES & GMRES – find solution of (1) within n+m iterations
– CG may fail because of the indefiniteness of system
– Often advantageous to use a preconditioner P

PCGPossible to use the preconditioned conjugate-gradient method
•
•
•
•
•
rank( )C l, , and invertibleT m l l lC EDE E D R R
, we may rewrite (1) asTz DE y
1
0
0 0
0
T
T
A B x c
D E z
B E y d
1
2
forms a basis of null-space of Z x
Z B E ZwzZ
1(2) becomes T
ZA w Z c
11 1 2 2 positive definiteT T
ZA Z AZ Z D Z
(Gould, Hribar, Nocedal)
(2)

Projected PCG
– Can perform iteration in the original (x, z) space so long as preconditioner chosen carefully
… Solve
Iterate until convergence
– …
– Solve
– …
11 1 2 2 positive definiteT T
NG Z GZ Z D Z
0
T r cG B
uB C
T r cG B
u wB C

Constraint Preconditioners
Case C=0
–
, ,0 0
T TA B G BH P
B B
( ) is a basis for the nullspace of n n mZ B R
The matrix P-1H has
– an eigenvalue at 1 with multiplicity 2m
– n-m eigenvalues which are defined by the generalized eigenvalue problem
T Tz zZ AZx Z GZx
(Keller, Gould, Wathen)

Case rank(C)=l
, ,T TA B G B
H PB C B C
( )1
1 1 1
( )2
2 2 2
is a basis for the nullspace of
such that spans
is a basis for the nullspace of C
such that spans
n n m
n m n
m m l
m l m
Z B
Y Y Z
Z
Y Y Z
R
R R
R
R R
The matrix P-1H has• at least 2m-l eigenvalues at 1• n-m eigenvalues which are defined by the generalized eigenvalue problem
• m eigenvalues defined by the generalized eigenvalue problem
where w=[xy; xz], subject to Y2BY1xy≠0.
1 12 2 2 2 2 2 2 2( ( ) ) ( ( ) )T T T T T TA B Y Y CY Y B w G B Y Y CY Y B w
1 1 1 1T T
z zZ AZ x Z GZ x

CVXQP1_S: m=50, n=100, G=diag(A)

CVXQP1_S: m=50, n=100, G=diag(A)

Explicit vs. implicit constraint preconditioner
Explicit constraint preconditioners: choose G, and then factorize
Implicit constraint preconditioners: find easily-invertible factors R and S so that
always holds
Pick parts of R and S to match * (≡ G) to parts of A
TG BP
B C
* TT B
RSRB C

11 21 1
21 22 2
1 2
T T
TT T
G G BG B
RSR G G BB C
B B C
•Easily invertible B1
11 12 1 11 21 31
21 22 2 21 22 32
31 32 33 31 32 33
,
T T T
T T
R R B S S S
R R R B S S S S
R R R S S S
• Require that both R and S are easily block invertible
- some sub-blocks should be zero

Example 1: C=0
11 1 31
21 22 2 22 32
31 31 32 33
0 0 0
, 0
0 0
T T
T T
R B S
R R R B S S S
R S S S
11 11 31 1 1 31 11 1 33 1
21 2 31 11 2 33 1 21 31 1 22 32 1
22 2 31 21 2 32 22 2 33 2 21 31 2
22 32 2 22 22 22
T T T T
T T T T T
T T T T T T
T T
G R S B B S R B S B
G B S R B S B R S B R S B
G B S R B S R B S B R S B
R S B R S R
31 31 22 and +ve definite TR S S
• can recover any G (Schilders)

Example 21
1 31 33 31
22 2 221
31 33 33
0 0 ( ) 0 0
0 , 0 0
0 0 0
T T
T
B R C R R
R R B S S
R R R
133
22 22 22
0 0
0T
TG B R BR S R
Example 31 1
1 31 31 31
21 22 2 22
31 31
0 0 0
, 0 0
0 0 0
T T
T
T
B R CR R
R R R B S S
R C R
1 31 21
21 31 1 22 22 22 21 11 21 21 31 2 2 31 21
0 T T
T T T T T T
B S RG
R S B R S R R S R R S B B S R

Numerical ExamplesCUTEr test set
Case C=0Explicit G=I Implicit G22=I
name n m fact. iter. total fact. iter. total ratio
CVXQP1 10000 5000 1.73 2 2.98 0.066 27 1.47 0.49
CVXQP2 10000 2500 0.045 2 0.15 0.032 9 0.28 1.80
CVXQP3 10000 7500 3.11 2 6.09 0.085 16 1.35 0.22
POWELL20 10000 5000 0.12 1 0.19 0.040 314 6.52 33.0
PRIMALC1 239 9 0.0047 2 0.0092 0.0023 1 0.0046 0.50
PRIMALC2 238 7 0.0041 1 0.0071 0.0023 1 0.0042 0.58
QPNBOEI1 726 351 0.028 59 0.44 0.0044 13 0.060 0.13
QPNBOEI2 305 166 0.0071 55 0.11 0.0029 17 0.031 0.29
UBH1 9009 6000 0.11 9 0.50 0.049 1 0.16 0.33
26/40 problems solved faster (20 if take into account perm time)

Case C=I
Explicit G=I Implicit G22=I
name n m fact. iter. total fact. iter. total ratio
CVXQP1 10000 5000 1.98 2 3.41 0.062 14 1.02 0.30
CVXQP2 10000 2500 0.048 2 0.16 0.030 11 0.33 2.10
CVXQP3 10000 7500 6.73 2 10.5 0.083 8 1.09 0.10
POWELL20 10000 5000 0.081 2 0.17 0.040 2 0.13 0.77
PRIMALC1 239 9 0.0045 1 0.0080 0.0024 1 0.0044 0.55
PRIMALC2 238 7 0.0037 1 0.0069 0.0021 1 0.0038 0.56
QPNBOEI1 726 351 0.029 26 0.27 0.0040 17 0.077 0.28
QPNBOEI2 305 166 0.0080 6 0.031 0.0027 14 0.032 1.03
UBH1 9009 6000 0.12 2 0.26 0.043 2 0.22 0.83
29/40 problems solved faster (25 if take into account perm time)

Conclusions• New method for constructing preconditioners for CG methods for a variety
of important problems
• Preconditioners– implicitly respect crucial structure
– easy to apply
– flexible and capable of improving eigenvalue clusters
• Extend the class of problems for which CG is applicable
• Still under development…but will be available as part of GALAHAD
Open questions
• How to pick basis B1 efficiently and so as to improve eigenvalue clusters
• How to approximate blocks of H in G
• What about Mr Greedy?

Conclusions• New method for constructing preconditioners for CG methods for a variety
of important problems
• Preconditioners– implicitly respect crucial structure
– easy to apply
– flexible and capable of improving eigenvalue clusters
• Extend the class of problems for which CG is applicable
• Still under development…but will be available as part of GALAHAD
Open questions
• How to pick basis B1 efficiently and so as to improve eigenvalue clusters
• How to approximate blocks of H in G