nw computational intelligence laboratory 1 designing a contextually discerning controller by lars...
TRANSCRIPT

1
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Designing A ContextuallyDesigning A ContextuallyDiscerning ControllerDiscerning Controller
By Lars Holmstrom
2
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Main PointsMain Points
• To Describe The Architecture And Training Methodology
• To Discuss What Is Mean By Context And Contextual Discernment
• To Demonstrate This Methodology Using The Pole-Cart System

3
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
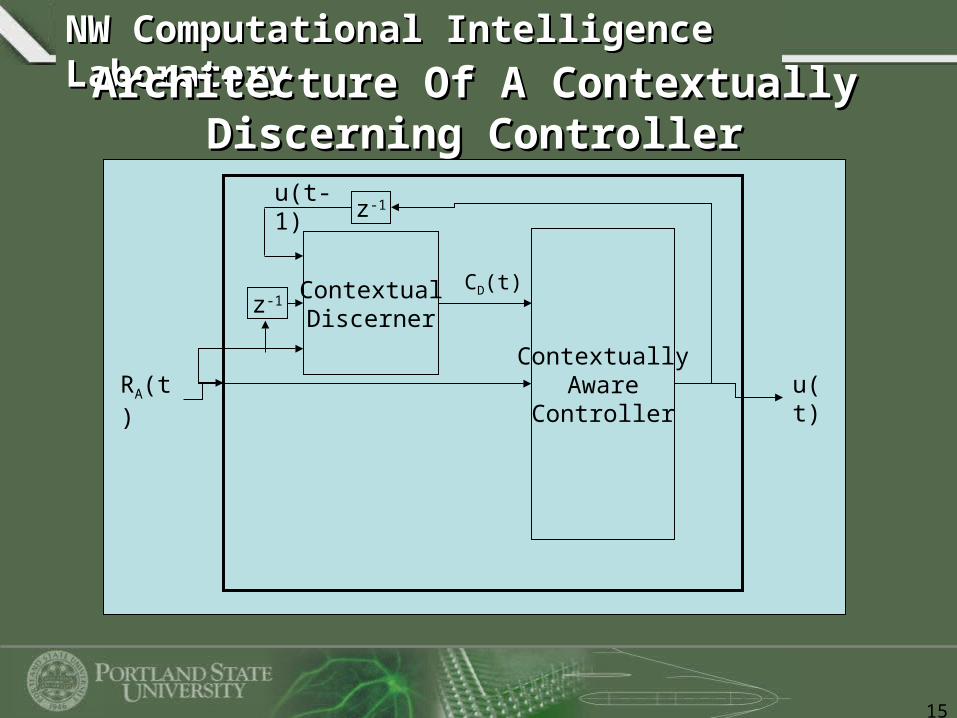
Architecture Of A Contextually Discerning ControllerArchitecture Of A Contextually Discerning Controller
ContextuallyAware
Controller
ContextualDiscerner
R(t)
CD(t)
u(t)

4
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
What Is Meant By Context?What Is Meant By Context?
• Conceptual Definition– A Set Of Parameters Capable Of Representing Changes
In The Dynamics Of A Plant
• Mathematical Definition– A Point On A Manifold Of Functions That Can Be
Indexed By A Specific Point In An Associated Continuous Coordinate Space

5
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
The Set Of Sine Functions Specified By CoordinatesThe Set Of Sine Functions Specified By Coordinates
Corresponding To Amplitude, Frequency, And DC-OffsetCorresponding To Amplitude, Frequency, And DC-Offset
0.5*sin(0.7*x)+0.3

6
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Contextual DiscernmentContextual Discernment
• To Discern The True Coordinates Of A Function That We Know Lies On A Specified Manifold But Has Unknown Manifold Coordinates
CD
CA
Current Discerned Context
Unknown Actual Context
∆CD0CD1
∆CD1
CD2
∆CD2
CD3
CD0
7
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
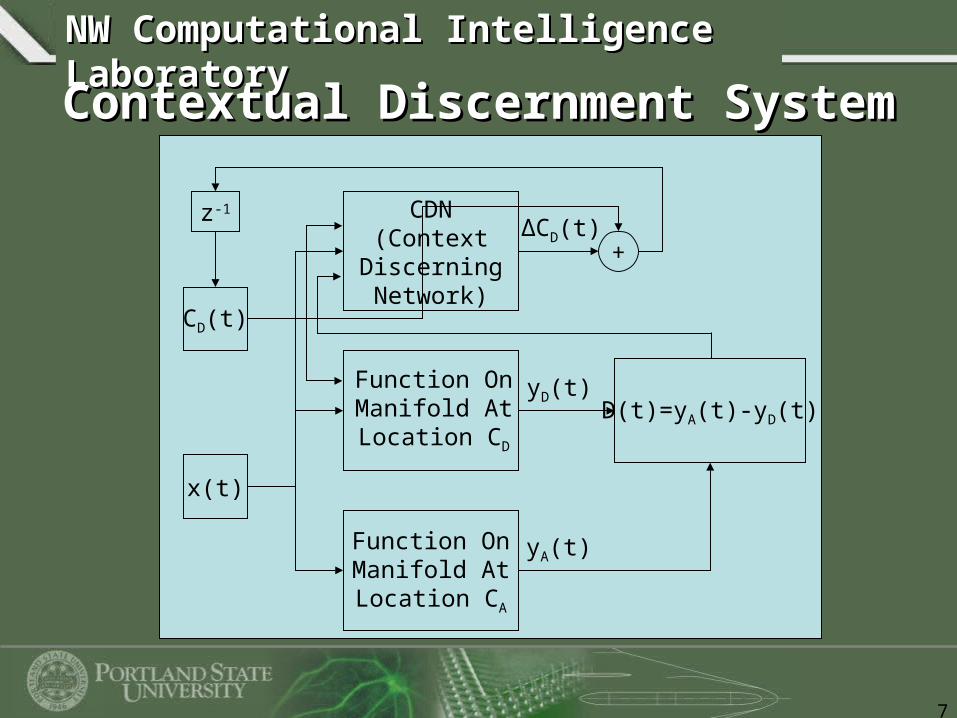
Contextual Discernment SystemContextual Discernment System
Function OnManifold AtLocation CA
CDN(Context
DiscerningNetwork)
D(t)=yA(t)-yD(t)
x(t)
CD(t)
z-1
+∆CD(t)
Function OnManifold AtLocation CD
yD(t)
yA(t)

8
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Training The Contextual Discernment SystemTraining The Contextual Discernment System
Function OnManifold AtLocation CA
CDN(Context
DiscerningNetwork)
D(t)=yA(t)-yD(t)
x(t)
CD(t)
z-1
+∆CD(t)
Function OnManifold AtLocation CD
yD(t)
yA(t)
∆CD(t) = u(t)
CD(t) = R(t)
CD(t) + ∆CD(t) = R(t+1)U(t)=(yA(t)-yD(t))2
Critic
CD(t)
x(t)λ(t)
Used To Train Critic
CD(t+1)
“Plant”

9
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Training The Critic and CDN With DHPTraining The Critic and CDN With DHP• The Approach Is Similar To That For Training A
Controller With DHP, But With The Substitutions:• R(t) = CD(t)
• u(t) = ∆CD(t)
• R(t+1) = CD(t)+∆CD(t)
• Action Training Signal:•λ(t+1)
• Critic Training Signal:•λ(t) - dU(t)/dCD(t) + λ(t+1)(I+d∆CD/dCD)

10
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
RA(t)
Training The CDN To Discern Plant ContextTraining The CDN To Discern Plant Context
Function OnManifold AtLocation CA
Function OnManifold AtLocation CD
CDN(Context
DiscerningNetwork)
D(t)=yA(t)-yD(t)x(t)
CD(t)
z-1
+∆CD(t)
yD(t)
yA(t)
x(t)
U(t)=(yA(t)-yD(t))2
Critic
CD(t)
λ(t)
Plant(With Context
Parameters CA)
Plant Model(With Context
Parameters CD)
u(t)
RA(t)D(t)=RA(t+1)-RD(t+1)
U(t)=(RA(t+1)-RD(t+1))2
RD(t+1)
RA(t+1)Used To Train Critic

11
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Context And State Variables For TrainingContext And State Variables For TrainingCDN Using An Analytic Pole-Cart PlantCDN Using An Analytic Pole-Cart Plant
• C(t)– Mass Of Cart Ranged From [3 5]kg– Length Of Pole Ranged From [0.5 3]m
• R(t)– Position Of Cart Ranged From [-2 2]m– Velocity Of Cart Ranged From [-2 2]m/s– Angle Of Pole Ranged From [-π/2 π/2]rads– Angular Velocity Ranged From [-2 2]rads/s
• u(t)– Control Ranged From [-5 5]Newtons

12
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
ResultsResults Of Contextual Discernment TestingOf Contextual Discernment Testing

13
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Architecture Of A Contextually Discerning ControllerArchitecture Of A Contextually Discerning Controller
ContextualDiscerner
ContextuallyAware
ControllerR(t)
C(t)
u(t)

14
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Designing A Contextually Aware ControllerDesigning A Contextually Aware Controller
• Train A Controller Using DHP In The Standard Fashion Except…
• Add The Contextual Variables For The Plant To The State Vector Used In The Training Process
• Vary These Contextual Variables Through The Training Process
15
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Architecture Of A Contextually Discerning ControllerArchitecture Of A Contextually Discerning Controller
ContextualDiscerner
ContextuallyAware
ControllerRA(t)
CD(t)
u(t)
z-1
z-1u(t-1)

16
NW Computational Intelligence LaboratoryNW Computational Intelligence Laboratory
Future TasksFuture Tasks
• Improve Contextual Discerner For The Pole-Cart System
• Train A Contextually Aware Controller For The Pole-Cart System
• Test The Ability Of The Contextually Discerning Controller In A Simulated “Real-Time” Environment