notch filter feedback control for k-period motion in a chaotic system
TRANSCRIPT

Notch Filter Feedback Controlfor k-Period Motion in a Chaotic System∗
Walter J. Grantham and Amit M. AthalyeSchool of Mechanical and Materials Engineering
Washington State UniversityPullman, WA 99164-2920, USA
Abstract
Chaotic motion can sometimes be desirable or undesirable, and hence control over
such a phenomenon has become a topic of considerable interest. Currently available
methods involve making systematic time-varying small perturbations in the system
parameters. A new method is presented here to achieve control over chaotic motion
using notch filter output feedback control. The notch filter controller uses an active
negative feedback with fixed controller parameters without affecting the original sys-
tem parameters. The motivation for using a notch filter in the feedback is to disturb
the balance of power at the lower end of the participating frequencies in the power
spectrum. This results in a truncation of the period-doubling route to chaos. For
low-period motions the harmonic balance method is used to show that a single partic-
ipating frequency can indeed be eliminated. To deal with relatively complex nonlinear
plants, and higher-period motions, a numerical optimal parameter selection scheme is
presented to choose the notch filter parameters. The procedures are tested on Duffing’s
oscillator with a notch filter feedback to achieve desired k-period motion.
1 IntroductionChaotic behavior in dynamical systems has been observed in a variety of applica-tions in many areas, such as biology, chemistry, ecology, economics, engineering, andphysics. Chaotic motion may be desirable in some cases, such as for mixing chemicalseffectively. But it is usually undesirable. For example, it can lead to early fatiguefailure in some structures due to unevenness of the stress variation with time. Due tothe existence of chaotic motion in a variety of systems, it has become important tounderstand chaotic behaviors in complex nonlinear systems and eventually to controlsuch behaviors.A recent paper [1] by Ott, Grebogi, and York presented a method to change
chaotic motion into a desired attracting periodic motion. The method is based onthe observation that a chaotic attractor has embedded within it an infinite numberof unstable periodic orbits. In [1] and some subsequent follow-up papers [2, 3], thedenseness of such unstable periodic orbits was used to make small time-dependent∗In Control and Chaos, K. Judd, A. I. Mees, K. L. Teo, T. L. Vincent, eds., Birkhauser, Boston,
1997, pp. 142 — 155.
142

Notch Filter Feedback Control 143
perturbations in an accessible system parameter and thereby achieve a desired peri-odic output. This algorithm is commonly known as the “OGY algorithm”. It hasbeen extended to higher-dimensional systems and a linear pole placement-type algo-rithm has been used to achieve feedback stabilization [3] of the periodic orbits. Theprocedure has been tested in a number of practical applications [4, 5, 6, 7].In this paper, we consider a method [8] for the control of chaotic systems not
through a time-varying system parameter, but by adding a feedback control mecha-nism consisting of a linear device called a notch filter. The original system parame-ters are fixed, at their chaotic values. The feedback controller’s parameters are alsoconstants, but they can be chosen to change chaotic motion into a desired periodicmotion.The motivation for using a notch filter is to suppress a selected frequency from the
power spectrum of the system. Consider a system exhibiting a period-doubling routeto chaos as some system parameter is varied. In a typical periodic motion with periodT and frequency ω = 2π/T , the output of the system will contain higher harmonics,at frequencies 2ω, 3ω, etc. As period-doubling occurs, the output will begin to containsubharmonic terms, at frequencies less than ω. The appearance of such subharmonicsis often a precursor to chaotic motion. We use a notch filter controller to suppressthe development of subharmonics and in turn avoid chaos. Furthermore, by suitablechoice of the notch filter parameters, the period-doubling can be stopped so as toyield a desired k-period motion.As an example system we will consider the Duffing oscillator
y + δy − 12y +
1
2y3 = u(t) (1)
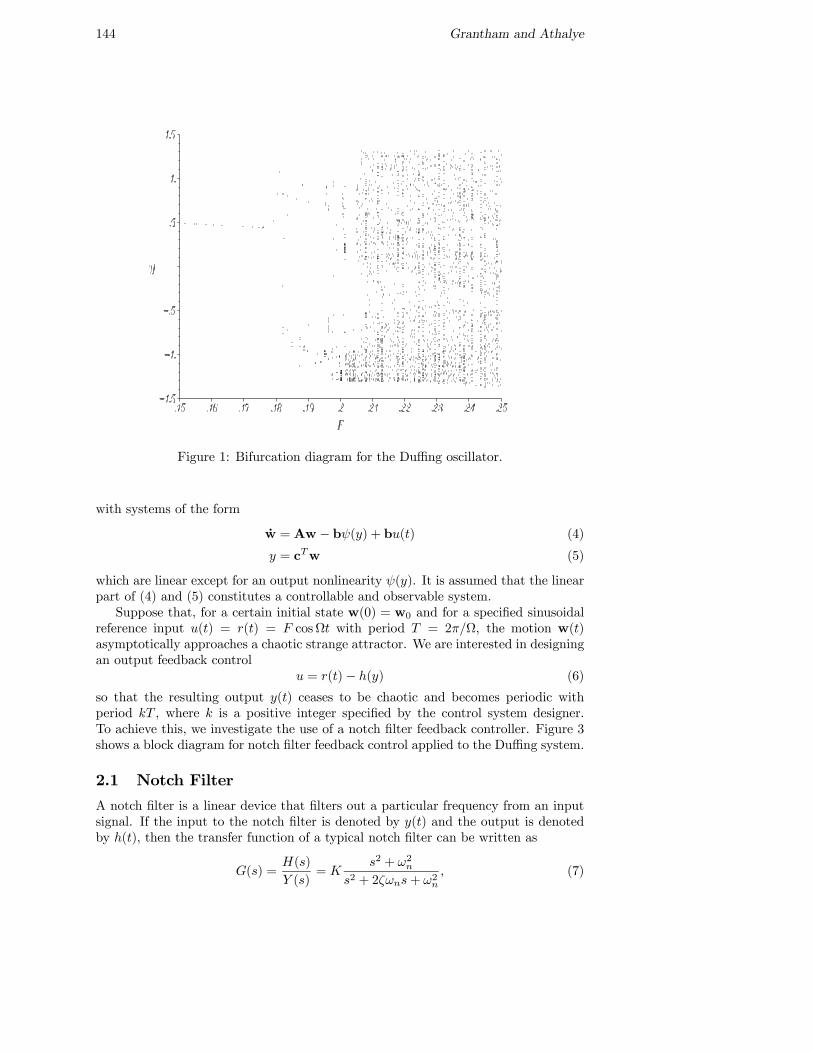
with u(t) = F cosΩt, Ω = 1 rad/sec, δ = 0.168, and F = 0.21. For these parametervalues the system is chaotic [9]. Figure 1 shows a single-period-sampled Poincaré mapfor this system as F is varied. Figure 2 shows power spectra [8] at various forcingamplitudes: (a) F = 0.15, (b) F = 0.178, (c) F = 0.198, (d) F = 0.21. We will beconcerned with converting the chaotic motion in case (d) into a specified k-periodmotion, but without changing any of the system parameters. We use a notch filterfeedback controller to suppress one of the subharmonic frequencies Ω/k in the outputfeedback of the controlled system.
2 Notch Filter Controller
In general we will be concerned with nonlinear single-input single-output systems ofthe form
w = F(w, u) (2)
y = g(w , u) (3)
where ( · ) = d( )/dt, w(t) ∈ Rn is the state, u(t) ∈ R is a control input, and y(t) ∈ Ris the output. We assume that F(·) : Rn × R → Rn is C1 and dissipative, i.e.,div(F) < 0. We will be especially concerned with systems that exhibit a period-doubling route to chaotic motion under sinusoidal inputs. For a comparison withresults based on the harmonic balance method, we will be particularly concerned
144 Grantham and Athalye
Figure 1: Bifurcation diagram for the Duffing oscillator.
with systems of the form
w = Aw − bψ(y) + bu(t) (4)
y = cTw (5)
which are linear except for an output nonlinearity ψ(y). It is assumed that the linearpart of (4) and (5) constitutes a controllable and observable system.Suppose that, for a certain initial state w(0) = w0 and for a specified sinusoidal
reference input u(t) = r(t) = F cosΩt with period T = 2π/Ω, the motion w(t)asymptotically approaches a chaotic strange attractor. We are interested in designingan output feedback control
u = r(t)− h(y) (6)
so that the resulting output y(t) ceases to be chaotic and becomes periodic withperiod kT , where k is a positive integer specified by the control system designer.To achieve this, we investigate the use of a notch filter feedback controller. Figure 3shows a block diagram for notch filter feedback control applied to the Duffing system.
2.1 Notch Filter
A notch filter is a linear device that filters out a particular frequency from an inputsignal. If the input to the notch filter is denoted by y(t) and the output is denotedby h(t), then the transfer function of a typical notch filter can be written as
G(s) =H(s)
Y (s)= K
s2 + ω2ns2 + 2ζωns+ ω2n
, (7)

Notch Filter Feedback Control 145
Figure 2: Power spectra for the Duffing oscillator.
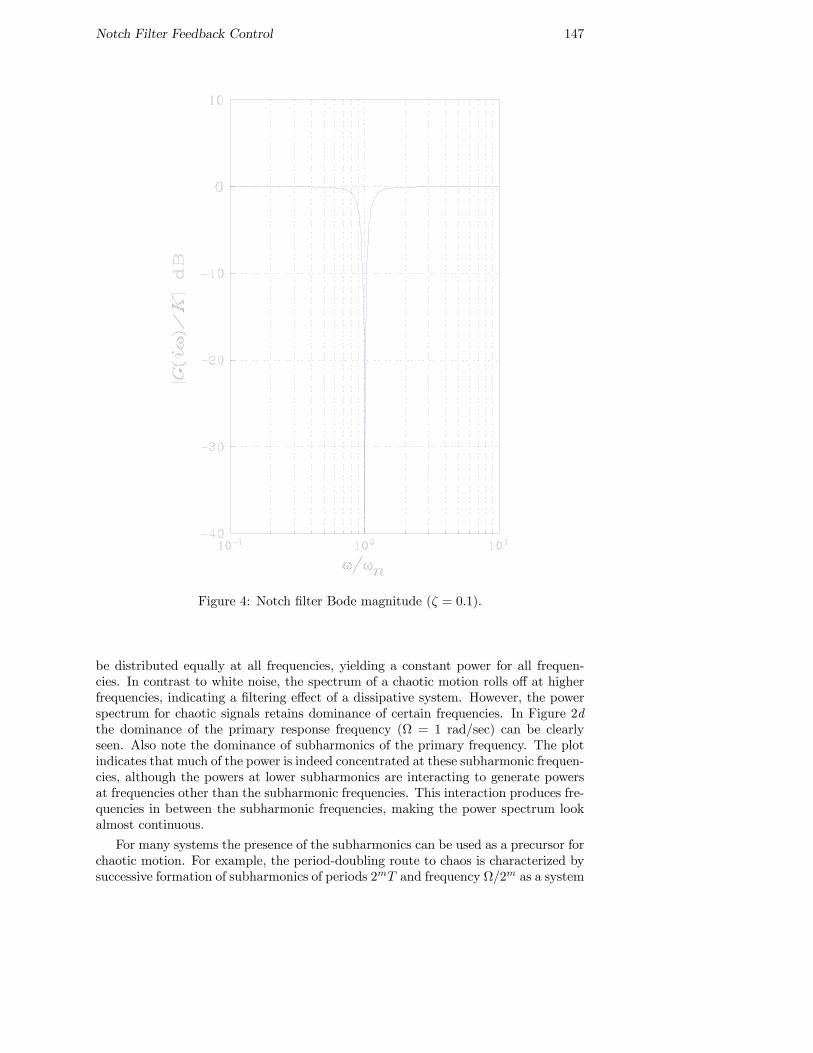
where ωn is the notch frequency, ζ is the notch filter damping coefficient, K is thenotch filter gain, and s is the Laplace variable. The Bode plot of the magnitude ofG(iω)/K is shown in Figure 4. As the name suggests, a “notch” is observed at thenotch frequency ωn in the Bode plot. Away from the notch frequency signals passthrough the notch filter essentially unaltered.In a state space representation, the notch filter equations can be written as
z = Pz+ q y (8)
with outputh = dz+K y , (9)
where
P =
∙0 1−ω2n −2ζωn
¸,
(10)
q =
∙01
¸, d =
£0 −2ζωnK
¤.

146 Grantham and Athalye
Figure 3: Notch filter feedback control system.
Defining x = (w, z) ∈ Rn+2 and specifying the input as r(t) = F cosΩt, thecontrolled system (4)—(9) is of the form
x = f(x, ν, t), (11)
where ν = [K ζ ωn]T denotes the parameters of the notch filter.
2.2 Rationale for Notch Filter Feedback
The periodic response of a harmonically excited nonlinear oscillator has a periodkT which is an integer multiple k ≥ 1 of the period T = 2π/Ω of excitation [10].Consequently, this response can be represented by a Fourier series
y(t) = a0 +∞Xj=1
½aj cos(j
Ω
kt) + bj sin(j
Ω
kt)
¾(12)
consisting of sinusoidal terms at certain frequencies ωj =jkΩ that are rational frac-
tions or integer multiples of the forcing frequency. The forcing frequency, Ω, is calledthe primary frequency. The superharmonic frequencies are the frequencies mΩ andthe subharmonic frequencies are Ω/m, m = 2, 3, . . . . Theoretically, these are theonly possible frequencies in a periodic response and the power spectrum will consistof discrete peaks. Practically, due to numerical sampling and leakage, the peaks getbroadened, as illustrated in Figures 2a—c.For a nonperiodic response, for example a chaotic response, the power spectrum
becomes broad-band and a continuum of frequencies appear in addition to the pri-mary frequency and the super- and subharmonics. For white noise, the power would
Notch Filter Feedback Control 147
Figure 4: Notch filter Bode magnitude (ζ = 0.1).
be distributed equally at all frequencies, yielding a constant power for all frequen-cies. In contrast to white noise, the spectrum of a chaotic motion rolls off at higherfrequencies, indicating a filtering effect of a dissipative system. However, the powerspectrum for chaotic signals retains dominance of certain frequencies. In Figure 2dthe dominance of the primary response frequency (Ω = 1 rad/sec) can be clearlyseen. Also note the dominance of subharmonics of the primary frequency. The plotindicates that much of the power is indeed concentrated at these subharmonic frequen-cies, although the powers at lower subharmonics are interacting to generate powersat frequencies other than the subharmonic frequencies. This interaction produces fre-quencies in between the subharmonic frequencies, making the power spectrum lookalmost continuous.
For many systems the presence of the subharmonics can be used as a precursor forchaotic motion. For example, the period-doubling route to chaos is characterized bysuccessive formation of subharmonics of periods 2mT and frequency Ω/2m as a system

148 Grantham and Athalye
parameter varies. Suppression of these subharmonics can disturb the distribution ofthe power, caused by the interaction with other subharmonics, and can be used to haltthe period-doubling sequence that leads to chaotic motion. A notch filter is an idealcandidate for suppressing such subharmonics dynamically, due to its single-frequencyfiltering characteristic.A common control systems approach, applicable to eliminating chaos, is to make
the system excessively stable, for example by using a negative feedback of the outputin (4)—(6), h(y) = Ky, with sufficiently large gain K. In reality, such feedback gainsare limited by the physical properties of the system or might be too expensive toachieve. Furthermore, such an approach generally will not yield the desired k-periodmotion, depending on the nonlinearity. Instead, we will show that a notch filter witha relatively small gain can be used in a feedback loop to achieve the goal of filteringa frequency dynamically and producing the desired periodic motion.
3 Harmonic Balance MethodHarmonic balance is a method of finding steady-state periodic solutions of a systemusing a truncated Fourier series solution. It has also been used to predict the onsetof chaos in autonomous systems [11]. Here we will use the method to develop ana-lytic estimates for the notch filter parameters needed to achieve a desired low-periodmotion.The state-space system represented by (4)—(9) can be transformed into an m =
n+ 2 order ordinary differential equation, of the form
y(m) + cm−1y(m−1) + . . .+ c0y + g(y, y, . . .) = r(t), (13)
where y(m) = dmy/dtm and g(·) contains the nonlinearities of the system. Thecoefficients ci are constants and r(t) is the excitation, at frequency Ω.We assume that the controlled system is exhibiting motion with at least a period
of 2πk/Ω. The most general Nth-order approximation for the k-periodic output canbe written as
y∗(t) = a0 +NXj=1
½aj cos(j
Ω
kt) + bj sin(j
Ω
kt)
¾. (14)
Substituting the approximated output (14) into (13) yields a result of the form
r(t) = A0 +NXl=1
½Al cos(l
Ω
kt) +Bl sin(l
Ω
kt)
¾+ higher harmonics. (15)
For a periodic input r(t) at the primary frequency Ω, let r(t) = α0+α cosΩt+β sinΩt.Balancing the constants and the first N harmonic terms on both sides of (15), therewill be 2N + 1 algebraic equations with 2N + 4 unknowns:
A0(a0, a1, ..., aN , b1, ..., bN ,K) = α0
Ak(a0, a1, ..., aN , b1, ..., bN ,K, ζ, ωn) = α
Bk(a0, a1, ..., aN , b1, ..., bN ,K, ζ, ωn) = β (16)
Al(a0, a1, ..., aN , b1, ..., bN ,K, ζ, ωn) = 0
Bl(a0, a1, ..., aN , b1, ..., bN ,K, ζ, ωn) = 0

Notch Filter Feedback Control 149
for l = 1, . . . , N , l 6= k.The describing function method corresponds to N = 1 and is frequently used
in nonlinear control systems analysis. However, our analysis will require the moregeneral harmonic balance method, since we need to approximate not only the primaryresponse, but also the first k subharmonic responses.
4 Parameter Optimization Method
The harmonic balance method applies to a restricted class of systems and is onlypractical for low-period motions because of the algebra involved. Furthermore, thetruncation errors could yield misleading results. In this section we present an alternateapproach based on direct optimization of the notch filter parameters.Consider the controlled system x = f(x, ν, t), with f(x, ν, t) = f(x, ν, t + T ). Let
x(t) = x(t;x0, ν) denote the solution from x(0) = x0. We seek parameter values νso that x(t) asymptotically converges to a periodic solution with period kT , wherek ≥ 1 is a specified integer. Numerically, we require that k be the smallest integer forwhich ||x(t0 + kT )− x(t0)|| ≤ , where is the machine accuracy, t0 is the transienttime of the system, chosen large enough for transients to die out, and || · || denotesthe Euclidean norm.To create k-period motion we will choose optimal parameters ν to minimize a
“cost” function G(ν) corresponding to deviation from k-period motion. For t1 =t0 + kT define a terminal time τ and a distance ρ as: τ = t, ρ = kx(t)− x(t0)k ifρ ≤ for some t ∈ (t0, t1), otherwise, τ = t1, ρ = kx(t1)− x(t0)k. Define a costfunction at time τ as
G(ν) = (τ − [t0 + kT ])2+ ρ2. (17)
5 Control of Duffing’s Oscillator
Notch filter control of the Duffing oscillator (1) yields the following state-space equa-tions for the overall control system:
x1 = x2x2 = −δx2 + 1
2(x1 − x31) + r(t)− hx3 = x4x4 = −ω2nx3 − 2ζωnx4 + x1,
(18)
where the output of the notch filter is given by
h = Kx1 − 2ζωnKx4, (19)
the system output is y = x1, and the reference input is r(t) = F cosΩt. The para-meters δ = 0.168, F = 0.21, and Ω = 1 and initial conditions x(0) = 0 are fixed.The notch filter controller parameters K, ζ, and ωn are also constants, but as yetundetermined.The unforced system (F = 0) described by (18)—(19) has three fixed points: one
at the origin and the other two at x = [±√1− 2K, 0,±√1− 2K/ω2n, 0]T . The origin
is the only fixed point for K ≥ 0.5. The two-well potential energy structure of theoriginal system is retained even with notch filter feedback for K < 0.5. Detailedresults concerning the effects of the notch filter parameters can be found in [8], along

150 Grantham and Athalye
with details of the harmonic balance method and the numerical simulations. Inmost of the simulations, the Lyapunov exponents were also employed to computethe Lyapunov dimension, using the Kaplan-Yorke conjecture, in order to differentiatebetween chaotic and nonchaotic motion.
5.1 Results of Harmonic Balance
An underlying premise of this study is the idea that one way to attempt a transi-tion from chaotic motion to k-period motion ought to be to tune the notch filterfrequency ωn near the (k − 1)th subharmonic frequency Ω/k. Because the precisenotch frequency required will also depend on the other filter parameters K and ζ andon the system nonlinearities, the harmonic balance method is used to analyticallyseek k-period motion.Although the harmonic balance is carried out for general K, only the value K =
1.0 is considered for the results presented in this section. For this value of K and forthe other two notch filter parameters ωn and ζ in the range [0, 1], limit cycles of theform (14) are sought by solving the algebraic equations (16) numerically. After thecoefficients a0, . . ., aN and b1, . . ., bN are determined, the stability of the approximatesolutions is analyzed by considering perturbations about the approximate solutionsand using Floquet’s theory [8].The results of the harmonic balance method are presented in Figure 5, which
shows predicted one-, two- and three-period motions for K = 1. As expected witha forcing frequency Ω = 1 rad/sec, the predicted two-period motion occurs nearthe notch frequency corresponding to the first subharmonic frequency of 0.5 rad/sec,especially at lower notch filter damping values. Similarly, the predicted three-periodmotion region occurs near ωn = 1/3 rad/sec. Single-period motion occurs in a regionroughly of the form ζωn < c ≈ 0.08, as well as for small but slightly larger ζ valuesnear ωn = 1. Some isolated holes appear in the three-period results because theFloquet stability tests generated a run-time error in a LINPACK eigenvalue routine.
5.2 Results of Optimal Parameter Selection
For the numerical experiments two values of notch filter gain K are considered. Thevalue K = 0.1 is small enough that it does not affect the two-well potential energystructure of the uncontrolled system, whereas the value K = 1.0 corresponds to onlyone equilibrium point for the unforced system.For a given value of K the 0 ≤ ωn ≤ 1 range was divided into 100 parts. At each
ωn value the parameter optimization problem was initiated with ζ = 0 to locate upto ten-period motions. When a particular k-period motion was detected neighboringinitial ζ values were used in the optimization process in order to determine the ζrange for which the k-period motion occurs.
5.2.1 High Gain
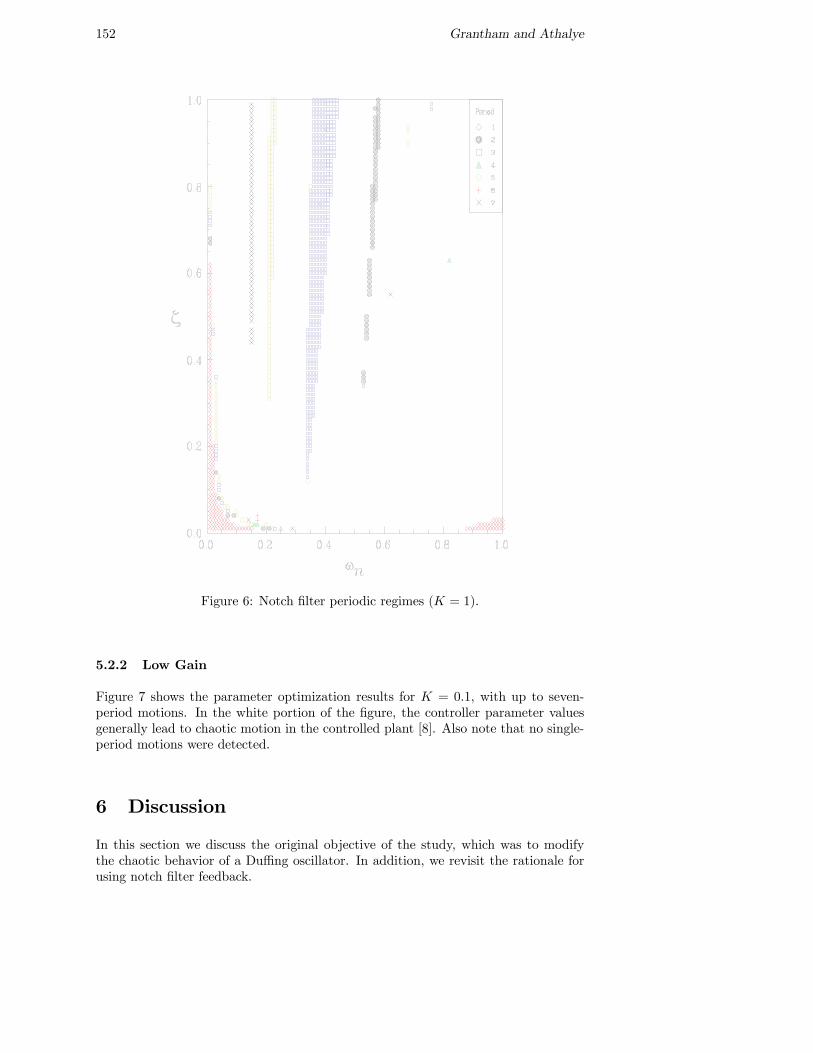
Figure 6 shows a parametric plot in the (ωn,ζ)-plane for K = 1 and motions up toseven-period motion. Close to the first subharmonic, ωn = 0.53 rad/sec, two-periodmotion is observed starting approximately at ζ = 0.35. In general, k-period regionstend to occur near the corresponding harmonic frequency Ω/k. The exceptions to thisrule are the four- and six-period motions, which were only found in isolated places

Notch Filter Feedback Control 151
Figure 5: Harmonic balance predictions (K = 1).
and along the edge of the one-period region. This result may be due to the cubicnonlinearity in the Duffing system.
For the most part, the white portion of Figure 6 consists of quasiperiodic (or atleast greater than ten-period) motions. No chaotic motions were observed, based onLyapunov exponent and Lyapunov dimension computations [8].
The one-, two-, and three-period optimization results in Figure 6 agree qualita-tively with the approximate harmonic balance results in Figure 5. However, harmonicbalance consistently over-estimated the corresponding periodic regimes. In particu-lar, the harmonic balance single-period region hides a multitude of k-period motionsat the edge of the single-period region in the lower-left corner of Figure 6.
152 Grantham and Athalye
Figure 6: Notch filter periodic regimes (K = 1).
5.2.2 Low Gain
Figure 7 shows the parameter optimization results for K = 0.1, with up to seven-period motions. In the white portion of the figure, the controller parameter valuesgenerally lead to chaotic motion in the controlled plant [8]. Also note that no single-period motions were detected.
6 Discussion
In this section we discuss the original objective of the study, which was to modifythe chaotic behavior of a Duffing oscillator. In addition, we revisit the rationale forusing notch filter feedback.

Notch Filter Feedback Control 153
Figure 7: Notch filter periodic regimes (K = 0.1).
6.1 Duffing Bifurcation
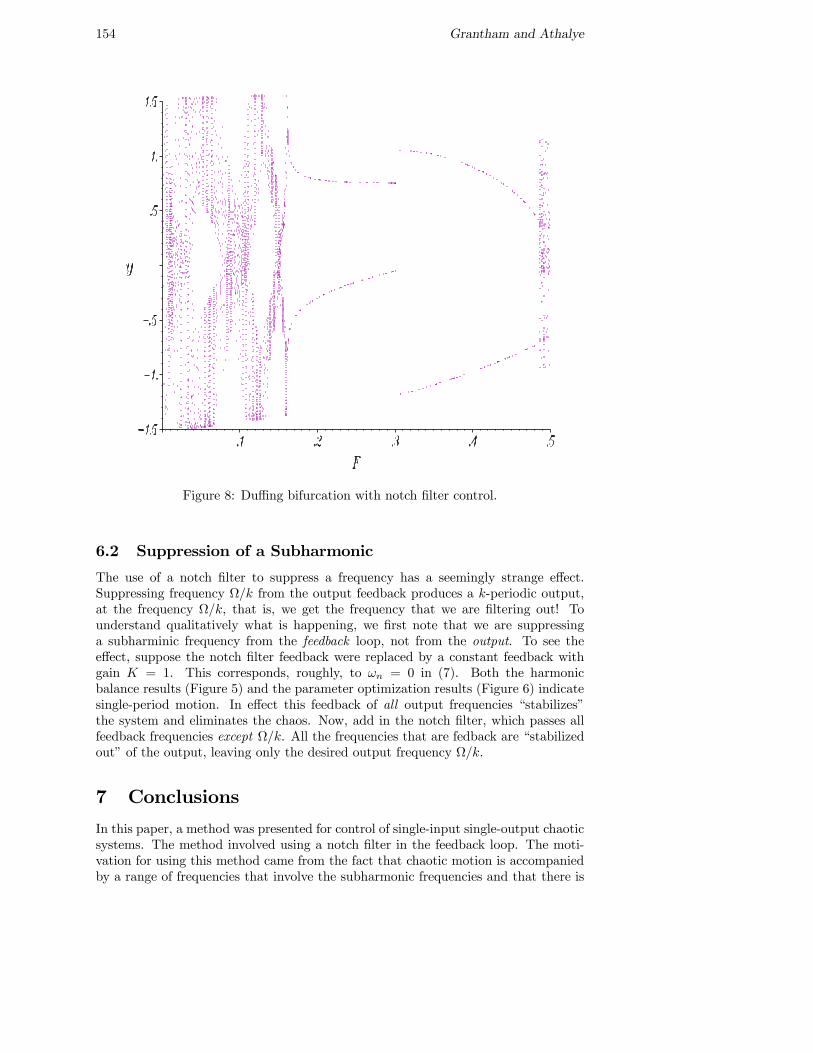
The original aim of this study was to see what effect notch filter feedback controlwould have on the bifurcation diagram in Figure 1. In particular, could the period-doubling route to chaos be curtailed? Seeking two-period motion, we tune the notchfilter frequency near the first subharmonic Ω/2 = 0.5. Specifically, we take K = 1and, from Figure 6, we select ωn = 0.53 and ζ = 0.36. Figure 8 shows the resultingsingle-period-sampled Poincaré map as the amplitude F of the forcing function isvaried. This figure shows clearly that not only can chaotic motion at F = 0.21 beconverted to, in this case, two-period motion, but also that the resulting motion isvery robust with respect to variations in F .
154 Grantham and Athalye
Figure 8: Duffing bifurcation with notch filter control.
6.2 Suppression of a Subharmonic
The use of a notch filter to suppress a frequency has a seemingly strange effect.Suppressing frequency Ω/k from the output feedback produces a k-periodic output,at the frequency Ω/k, that is, we get the frequency that we are filtering out! Tounderstand qualitatively what is happening, we first note that we are suppressinga subharminic frequency from the feedback loop, not from the output. To see theeffect, suppose the notch filter feedback were replaced by a constant feedback withgain K = 1. This corresponds, roughly, to ωn = 0 in (7). Both the harmonicbalance results (Figure 5) and the parameter optimization results (Figure 6) indicatesingle-period motion. In effect this feedback of all output frequencies “stabilizes”the system and eliminates the chaos. Now, add in the notch filter, which passes allfeedback frequencies except Ω/k. All the frequencies that are fedback are “stabilizedout” of the output, leaving only the desired output frequency Ω/k.
7 Conclusions
In this paper, a method was presented for control of single-input single-output chaoticsystems. The method involved using a notch filter in the feedback loop. The moti-vation for using this method came from the fact that chaotic motion is accompaniedby a range of frequencies that involve the subharmonic frequencies and that there is

Notch Filter Feedback Control 155
a pattern of distribution of power in a chaotic power spectrum. It was shown that,by disturbing this distribution by eliminating certain subharmonic frequencies, it isindeed possible to eliminate chaotic motion. In addition, it is possible to achieve adesired k-period motion at the output. The controller parameters for k-period motionwere found using both the harmonic balance method and an optimal parameter se-lection technique. The harmonic balance method is effectively limited to low-periodmotions and can give erroneous results due to truncation errors. The optimal pa-rameter selection technique is a general numerical method for finding the controllerparameters for k-period motion and overcomes the short comings of the harmonicbalance method.
References[1] Ott, E., Grebogi, C., and Yorke, J. A., “Controlling Chaos,” Phys. Rev. Let.,
Vol. 64, No. 11, pp. 1196—1199, 1990.
[2] Ott, E., Grebogi, C., and Yorke, J. A., “Controlling Chaotic Dynamical Sys-tems,” CHAOS/XAOS, Soviet-American Perspectives on Nonlinear Science,American Institute of Physics, pp. 227—258, 1990.
[3] Romeiras, F.J., Grebogi, C., Ott, E., and DayawansaW. P., “Controlling ChaoticDynamical Systems,” Physica D, Vol. 58, No. 1—4, pp. 165—192, 1992.
[4] Wang, Y., Singer, J., and Bau H. H., “Controlling Chaos in a Thermal Convec-tion Loop,” J. of Fluid Mechanics, Vol. 237, pp. 479—498, 1992.
[5] Roy, R. T., Murphy Jr., T. W., Maier, T. D., and Gills Z., “Dynamical Controlof a Chaotic Laser: Experimental Stabilization of a Globally Coupled System,”Phys. Rev. Let., Vol. 68, No. 9, pp. 1259—1262, 1992.
[6] Azevedo, A. and Rezende, S. M., “Controlling Chaos in Spin-Wave Instabilities,”Phys. Rev. Let., Vol. 66, No. 10, pp. 1342—1345, 1990.
[7] Hunt, E. R., “Stabilizing High-Period Orbits in a Chaotic System: The DiodeResonator,” Phys. Rev. Let., Vol. 67, No. 15, pp. 1953—1955, 1991.
[8] Athalye, A. M., Notch Filter Control of a Chaotic System, Ph.D. dissertation,Department of Mechanical and Materials Engineering, Washington State Uni-versity, Pullman, WA, 1993.
[9] Pezeshki, C., Elgar, S., and Krishna, R. C., “Bispectral Analysis of SystemsPossessing Chaotic Motion,” J. of Sound and Vibr., Vol. 173, No. 3, pp. 357—368, 1990.
[10] Guckenheimer, J. and Holmes, P., Nonlinear Oscillations, Dynamical Systems,and Bifurcations of Vector Fields, Springer-Verlag, New York, 1983.
[11] Genesio, R. and Tesi, A., “Harmonic Balance Methods for Analysis of ChaoticDynamics in Nonlinear Systems,” Automatica, Vol. 28, No. 3, pp. 531—548, 1992.