not all areas are equal: transfer learning for semantic...
TRANSCRIPT

Not All Areas Are Equal: Transfer Learning for Semantic Segmentation via
Hierarchical Region Selection
Ruoqi Sun 1∗ Xinge Zhu 2∗ Chongruo Wu 3 Chen Huang 4 Jianping Shi 5 Lizhuang Ma 1
1Shanghai Jiao Tong University 2The Chinese University of Hong Kong3University of California, Davis 4Carnegie Mellon University 5SenseTime Research
[email protected] [email protected] [email protected]
[email protected] [email protected] [email protected]
Abstract
The success of deep neural networks for semantic seg-
mentation heavily relies on large-scale and well-labeled
datasets, which are hard to collect in practice. Synthetic
data offers an alternative to obtain ground-truth labels for
free. However, models directly trained on synthetic data
often struggle to generalize to real images. In this paper,
we consider transfer learning for semantic segmentation
that aims to mitigate the gap between abundant synthetic
data (source domain) and limited real data (target domain).
Unlike previous approaches that either learn mappings to
target domain or finetune on target images, our proposed
method jointly learn from real images and selectively from
realistic pixels in synthetic images to adapt to the target
domain. Our key idea is to have weighting networks to
score how similar the synthetic pixels are to real ones, and
learn such weighting at pixel-, region- and image-levels. We
jointly learn these hierarchical weighting networks and seg-
mentation network in an end-to-end manner. Extensive ex-
periments demonstrate that our proposed approach signifi-
cantly outperforms other existing baselines, and is applica-
ble to scenarios with extremely limited real images.
1. Introduction
The advances in deep learning have led to many break-
throughs in artificial intelligence. Various tasks in computer
vision [13, 14, 32] have been revisited and have achieved
the state-of-the-art performance. However, these improve-
ments often require vast labeled data, which is prohibitively
expensive for many vision tasks. Semantic segmentation
is such an example, in which annotating an image pixel-
wisely may take more than 90 minutes [7], resulting in a
failure to scale. Alternatively, researchers [24, 25] switched
to use Computer Graphics techniques to render synthetic
∗The first two authors contributed equally to this paper.
Figure 1. (a): Although two images are from different domains,
some regions still hold similar structures, like the car and road
region. Our design philosophy is to focus on these similar regions
for improving the effectiveness. (b): Results of joint training on
different numbers of synthetic images (from GTAV) and insufficient
real images. Blue bar indicates the result of using real images only.
images where pixel-wise labels are generated automatically
at a much faster speed. In this paper, we consider utilizing
abundant labeled synthetic data (source domain) and in-
sufficient labeled real data (target domain) together to
make a better performance on real data. It is noted that our
problem setting is different from the unsupervised domain
adaptation (i.e., labeled synthetic data and unlabeled real
data) and semi-supervised domain adaptation (i.e., small
amount of labeled real data and abundant unlabeled real
data in one domain). Due to the labor-free annotations and
superior performance, the learning scheme we focus on has
much practical significance in real-world applications.
Given abundant labeled synthetic images and insufficient
labeled real-world images, it is natural to expect better seg-
mentation performance from such ”augmentation” in pixel
space. However, this is usually not the case and perfor-
4360

mance may even degrade as shown in Fig 1(b). The main
reason lies in the domain gap between synthetic and real-
world data, in terms of differences in textures (rendering re-
alism), lighting conditions and so on. This domain gap can
easily bias model learning towards the synthetic data distri-
bution, causing a failure to generalize to real images [3, 23].
To alleviate this problem, data resampling methods are
used to reduce the impact of data bias. Options include
randomly resampling source domain images [2] or select-
ing those similar to target domain images based on low-
level features [12]. Another family of methods uses transfer
learning to apply the knowledge learned in one domain to
another [1, 8, 15]. The idea is to learn the transformation
to target domain in feature or output space. One common
drawback of these methods is that they learn or un-learn
from holistic images. However, for the pixel-wise segmen-
tation task, it is likely to find domain knowledge or sim-
ilarity in pixel regions, where transfer learning can lever-
age useful information locally. We show an example in
Fig 1(a), in which a realistic image scene from synthetic
image (source domain) contains the road region and a car
that have similar structure to the counterpart in a real im-
age (target domain). In other words, domain knowledge can
be distributed at a fine-grained pixel level rather than only
image level, and similar regions from source image make
higher contributions for the joint learning.
Motivated by these findings, we propose a hierarchical
transfer learning framework to learn the real image seg-
mentation by combining information in synthetic images at
three levels: pixel-, region- and image-levels. Three weight-
ing networks are learned together to assign higher weights
to such synthetic image granularities that are similar to real
ones(target domain). We are hence able to learn from both
real images and selected synthetic pixels for domain adap-
tation purposes, which follows the nature of pixel-wise task
and is much more flexible than training image selection.
Note that our weighting networks are jointly trained with
segmentation network in an end-to-end manner. The en-
tire training framework takes any combination of real and
synthetic datasets as input, with no assumptions about their
distributions — the common domain knowledge is automat-
ically mined locally.
The main contributions of this paper can be summarized
as follows:
• Our studies reveal a practical and cost-free learning
scheme to improve the performance of real image seg-
mentation with abundant synthetic images. It is also a
step towards the generic learning setting with multiple
datasets (sources).
• We develop a hierarchical transfer learning method
for semantic segmentation, with the ability of learning
from insufficient real images and auto-mined similar
synthetic pixels.
• Extensive experiments are conducted on various
datasets. The proposed method achieves state-of-the-
art performance, while still stays strong with extremely
insufficient (about only 50%) real images for training.
2. Related Work
Semantic Segmentation Semantic segmentation is an
important task in a large variety of fields, like autonomous
vehicles, remote sensing, etc. Recently, the revolution
of deep neural network has pushed this task to a new
stage [5, 31, 32, 21]. Unfortunately, training such deep
models usually requires a large amount of well-labeled im-
ages, which is expensive and time-consuming. To save
time and cost for annotation, researchers attempted to ob-
tain data and corresponding free labels from the video game
GTAV [24] or their own simulation environment [9]. Al-
though collecting them is much faster and cheaper, the use
of synthetic images does not necessarily generalize to real
images due to the domain gap.
Transfer Learning Transfer learning aims to apply the
knowledge learned from one domain to improve the learn-
ing in another. It is a popular approach to address issues
caused by insufficient data in one of domains or the data
gap between different domains [4, 11].
There are two main folds of transfer learning methods:
data selection and domain transformation. 1). For the data
selection methods, the random selection strategy [1, 8] can
be seen as a simplest option, then [12] improved by scor-
ing the source data according to the low-level feature-based
similarity. 2). For the domain transformation methods,
Sarafianos et al. [27] applied the Adaptive-SVM+ algorithm
to extract useful information from source domain.
Many recent works have been trying to apply GANs for
domain alignment. For example, [10, 11, 30, 34, 33] use
adversarial training to obtain domain-invariant representa-
tions and reduce the domain gap. Volpi et al. [29] trained
the encoder of the source domain to augment features via
auxiliary training. Chen et al. [6] exploited spatial structure
to transfer region-level knowledge from source to target do-
main. [16] enhanced the semi-supervised learning by com-
bining the discriminator with the weighting map prediction
on the pixel-level only, in which all data from same domain
is used.
The common drawback of methods mentioned above is
that they are applied at single level, neglecting the fact that
domain knowledge/similarity can be distributed at multi-
ple levels (i.e., pixel, region and image-level) across dif-
ferent images. In this paper, we propose a transfer learning
method to transfer knowledge from hierarchical levels in
source domain, jointly training with semantic segmentation.
Note that our problem setting is different from other trans-
fer learning settings. Unlike the unsupervised [4, 6, 34] and
4361

Figure 2. An overview of our model architecture. A pair of source and target domain images go through the encoder E and a segmentation
classifier S (only consists of upsample operation) to predict segmentation maps under loss LsSeg and L
tSeg. For source image predictions,
they are re-weighted by 3 weighting networks Wp, Wr and Wi at pixel-, region- and image levels before computing the loss LsSeg. We also
improve encoder E’s expressiveness by attaching a generator G and a discriminator D to assess the reconstructed image quality (LRec) and
fidelity (LAdv). For each pair of source and target images, we alternatively optimize encoder E, networks G+D, and weighting networks
(by LWp , LWr , LWi) via back-propagation.
semi-supervised domain adaptation work [16], our method
takes the labeled source and labeled target images together
to automatically mine the similarity between them to do
segmentation adaptation.
3. Methodology
Our goal is to perform transfer learning from insuffi-
cient real data (target domain) and abundant synthetic data
(source domain) to improve the performance of seman-
tic segmentation. Concretely, we have the dataset Xs ={(xs, ys)} and Xt = {(xt, yt)} drawn from a labeled
source domain s and a labeled target domain t, sharing the
set of categories for segmentation. During training, we take
both source and target data as the inputs, while we only test
on target images. Note that there is no overlap between the
training and testing images, and our setting is different from
the semi-supervised learning which has some labeled data
and more unlabeled data but both are in one domain.
Under our problem setting, the learning difficulty lies in
the data gap between source and target domains. To address
such gap adaptively, we propose weighting networks to fa-
vor regions from source images that are highly similar to the
target ones, and leverage them to benefit joint learning from
both source and target domains. In order to take both local
and global information into account, we learn hierarchical
weighting networks to score similarity at pixel level, region
level and the entire image level. The weighting networks
are learned together with the segmentation network in an
end-to-end manner. Motivated by the effectiveness of ad-
versarial adaptation methods [11, 26], we also incorporate
the GAN into our model, whose discriminator drives the
source distribution towards the target one, to further help
domain adaptation. Fig 2 illustrates our model architecture,
which will be detailed in the following sections.
3.1. Hierarchical Weighting Networks
We aim to address the data gap by learning with target
real images and only similar synthetic image regions. We
propose weighting networks for such fine-grained region
selection rather than image-level selection. The weighting
networks should assign higher weights to synthetic image
regions that are similar to real image regions from target
domain. Due to significant variations in both texture and ap-
pearance (such as color and lighting) from two domains, we
encourage the segmentation network to predict the same for
similar structured regions. Therefore, it is effective to de-
fine the similarity in segmentation label space (no textures
exist in label space), thus give more weight on those pix-
els with similar label structures. This essentially robustifies
segmentation to data variance across domains in a transfer
learning framework. We also see the link to data augmen-
tation, but in a much more flexible way to augment with
arbitrary image regions from source domain.
To enrich the transfer learning process, we propose hier-
archical weighting networks to find between-domain simi-
larity at pixel (network Wp), region (network Wr) and im-
age (network Wi) levels. Their objective functions are:
LWk= ‖Mk(x)− dk‖1, k ∈ {p, r, i}, (1)
4362
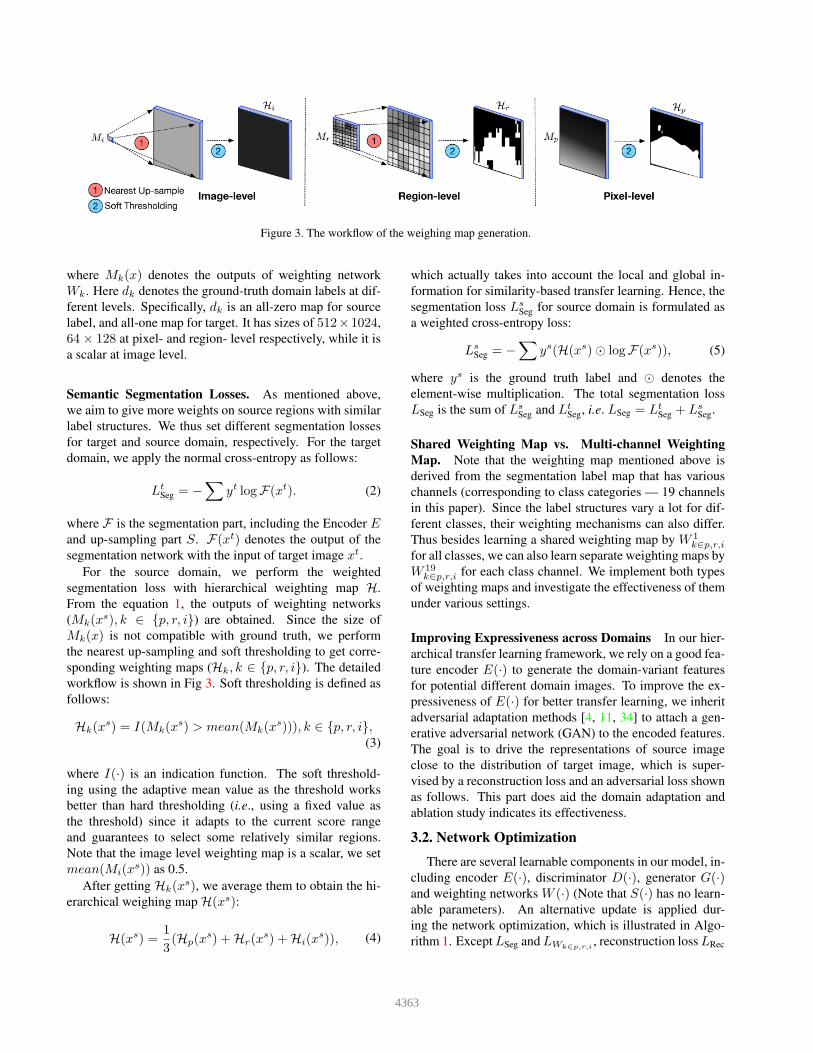
Figure 3. The workflow of the weighing map generation.
where Mk(x) denotes the outputs of weighting network
Wk. Here dk denotes the ground-truth domain labels at dif-
ferent levels. Specifically, dk is an all-zero map for source
label, and all-one map for target. It has sizes of 512×1024,
64× 128 at pixel- and region- level respectively, while it is
a scalar at image level.
Semantic Segmentation Losses. As mentioned above,
we aim to give more weights on source regions with similar
label structures. We thus set different segmentation losses
for target and source domain, respectively. For the target
domain, we apply the normal cross-entropy as follows:
LtSeg = −
∑yt logF(xt). (2)
where F is the segmentation part, including the Encoder E
and up-sampling part S. F(xt) denotes the output of the
segmentation network with the input of target image xt.
For the source domain, we perform the weighted
segmentation loss with hierarchical weighting map H.
From the equation 1, the outputs of weighting networks
(Mk(xs), k ∈ {p, r, i}) are obtained. Since the size of
Mk(x) is not compatible with ground truth, we perform
the nearest up-sampling and soft thresholding to get corre-
sponding weighting maps (Hk, k ∈ {p, r, i}). The detailed
workflow is shown in Fig 3. Soft thresholding is defined as
follows:
Hk(xs) = I(Mk(x
s) > mean(Mk(xs))), k ∈ {p, r, i},
(3)
where I(·) is an indication function. The soft threshold-
ing using the adaptive mean value as the threshold works
better than hard thresholding (i.e., using a fixed value as
the threshold) since it adapts to the current score range
and guarantees to select some relatively similar regions.
Note that the image level weighting map is a scalar, we set
mean(Mi(xs)) as 0.5.
After getting Hk(xs), we average them to obtain the hi-
erarchical weighing mapH(xs):
H(xs) =1
3(Hp(x
s) +Hr(xs) +Hi(x
s)), (4)
which actually takes into account the local and global in-
formation for similarity-based transfer learning. Hence, the
segmentation loss LsSeg for source domain is formulated as
a weighted cross-entropy loss:
LsSeg = −
∑ys(H(xs)⊙ logF(xs)), (5)
where ys is the ground truth label and ⊙ denotes the
element-wise multiplication. The total segmentation loss
LSeg is the sum of LsSeg and Lt
Seg, i.e. LSeg = LtSeg + Ls
Seg.
Shared Weighting Map vs. Multi-channel Weighting
Map. Note that the weighting map mentioned above is
derived from the segmentation label map that has various
channels (corresponding to class categories — 19 channels
in this paper). Since the label structures vary a lot for dif-
ferent classes, their weighting mechanisms can also differ.
Thus besides learning a shared weighting map by W 1
k∈p,r,i
for all classes, we can also learn separate weighting maps by
W 19
k∈p,r,i for each class channel. We implement both types
of weighting maps and investigate the effectiveness of them
under various settings.
Improving Expressiveness across Domains In our hier-
archical transfer learning framework, we rely on a good fea-
ture encoder E(·) to generate the domain-variant features
for potential different domain images. To improve the ex-
pressiveness of E(·) for better transfer learning, we inherit
adversarial adaptation methods [4, 11, 34] to attach a gen-
erative adversarial network (GAN) to the encoded features.
The goal is to drive the representations of source image
close to the distribution of target image, which is super-
vised by a reconstruction loss and an adversarial loss shown
as follows. This part does aid the domain adaptation and
ablation study indicates its effectiveness.
3.2. Network Optimization
There are several learnable components in our model, in-
cluding encoder E(·), discriminator D(·), generator G(·)and weighting networks W (·) (Note that S(·) has no learn-
able parameters). An alternative update is applied dur-
ing the network optimization, which is illustrated in Algo-
rithm 1. Except LSeg and LWk∈p,r,i, reconstruction loss LRec
4363

and adversarial loss LAdv are also used during training and
shown as follow.
Reconstruction loss LRec We use Conv5 features from
the encoder E(·), and attach a generator G(·) to reconstruct
each input image. The reconstruction loss LRec is defined as
an L1 loss in pixel space. The detailed architecture of the
encoder and generator are shown in Section 3.3.
Adversarial loss LAdv We also follow the adversarial strat-
egy [20] to use a discriminator D(·) to promote the fidelity
of reconstructed images. The generator G(·) and discrim-
inator D(·) are alternately trained by adversarial loss LAdv
as in a min-max game. In this way, we encourage the En-
coder E(·) to generate domain-invariant feature representa-
tions which could fool the discriminator.
Algorithm 1 The proposed hierarchical transfer learning
method
Input: source domain Xs and target domain Xt; N is the
number of iterations.
Initialization: Initialize hierarchical weighting networks
W , generator G(·) and discriminator D(·) from scratch.
Encoder E(·) is initialized with ImageNet-pretrained
model.
1: repeat
2: {xs, ys}← random image pair from source domain
3: {xt, yt} ← random image pair from target domain
4: Generate predictions for both xs and xt
5: H(xs) ← generate the hierarchical weighting map
for source image by Eq. (4)
6: LSeg ← compute segmentation loss for target and
source image by Eq. (2) and Eq. (5)
7: E ← minLSeg + LAdv
8: Wk∈p,r,i ← minLWk∈p,r,i, Eq. (1)
9: G← minLRec + LAdv
10: D← minLAdv
11: until N
3.3. Network Architecture
Hierarchical weighting networks It consists of 5 convo-
lution layers with kernel 4 × 4 and stride of 2 followed by
a Leaky-ReLU with parameter 0.2 except for the last layer.
The number of channels is 64, 128, 256, 512, for the respec-
tive convolutional layer. An up-sampling layer is attached
after the pixel-level weighting network to resize the output
to the original dimension.
Segmentation network We use FCN8s [22] as the se-
mantic segmentation model. The backbone is VGG16 [28]
which is pretrained on the ImageNet dataset. We divide the
network into encoder E(·) and segmentation classifier S(·)(S(·) has no learnable parameters).
Generative adversarial network We apply the Patch-
GAN [18] as the discriminator, which tries to classify over-
lapping image patches as real or fake. The generator is com-
posed of 2 Residual blocks and 7 convolutional layers. The
kernel size, stride and padding of the first 6 convolutional
layers are respectively 3 × 3, 2, and 1, while the last layer
has 1 × 1, 1, and 1. The discriminator contains 7 convolu-
tional layers with kernel size, stride and padding being 3×3,
2, and 1, respectively. Leaky-ReLU layers with parameter-
ized 0.01 are adopted for the first 6 convolutional layers.
4. Experiments
In this paper, three datasets are employed in our exper-
iments, including two synthetic datasets GTAV [24]
and SYNTHIA [25], and one real-world dataset
CITYSCAPES [7].
GTAV has 24,966 urban scene images rendered by the gam-
ing engine GTAV. The semantic categories are compatible
with the CITYSCAPES dataset. We take the whole GTAV
dataset with labels as the source domain data.
SYNTHIA is a large dataset which contains different
video sequences rendered from a virtual city. We take
SYNTHIA-RAND-CITYSCAPES as the source domain
data which provides 9,400 images from all the sequences
with CITYSCAPES-compatible annotations.
CITYSCAPES is a real-world image dataset focused on
the urban scene, which consists of 2,975 images in training
set and 500 images for validation. The resolution of images
is 2048 × 1024 and 19 semantic categories are provided
with pixel-level labels. We take the whole training set as
the target domain data. The results of our transfer learning
scheme are reported on the validation set.
It can be found that both synthetic datasets consist of a
large amount of images and the real-world dataset is much
small. Thus it is well motivated that synthetic data provides
an appealing option for the issue of insufficient data.
Training Details Adam [17] optimization is applied with
β1=0.9 and β2=0.999. The initial learning rate is 1e-4 and
is decreased with polynomial decay with power of 0.9. Due
to the GPU memory limitation, images used in our experi-
ments are resized to 1024×512 and batch size is 1. Since
the discriminator is easier to converge than generator, we
slightly perturb the labels of discriminator during training.
4.1. Experimental Results
In this section, we provide a quantitative evaluation
by performing multiple joint learning experiments, i.e.,
GTAV + CITYSCAPES → CITYSCAPES, SYNTHIA +
CITYSCAPES→ CITYSCAPES and GTAV + SYNTHIA
+ CITYSCAPES→ CITYSCAPES. More experimental ex-
periments is contained in the supplementary material.
4364
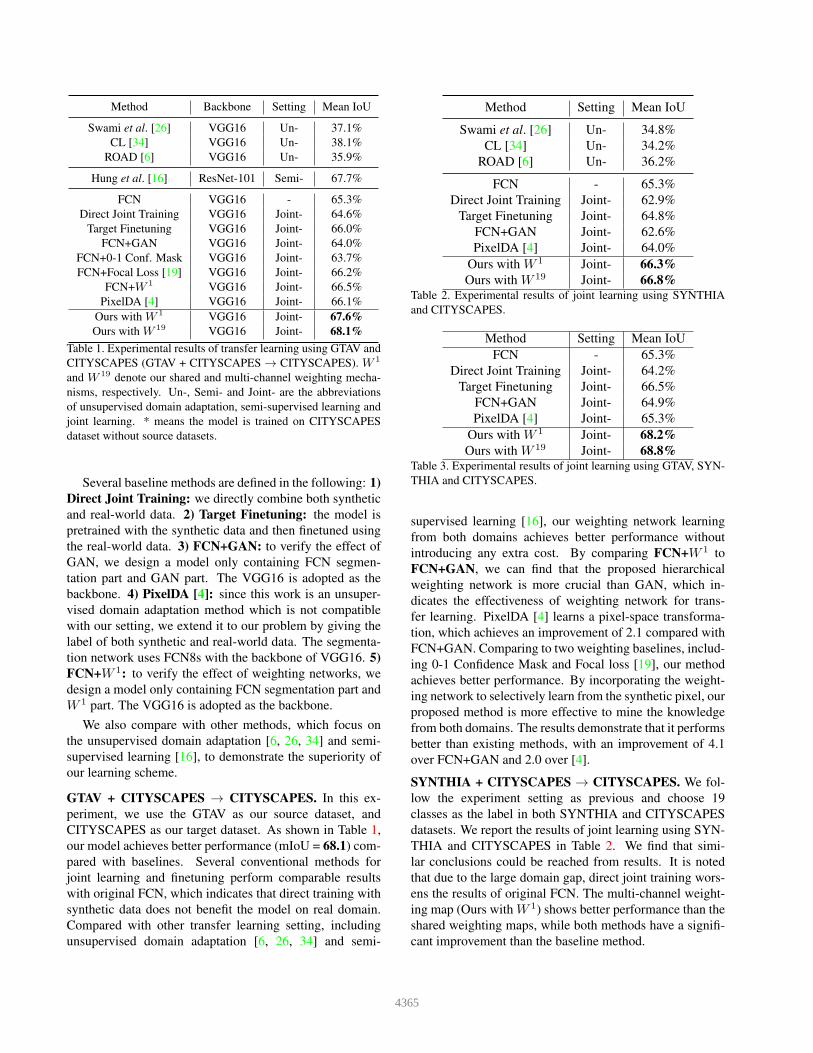
Method Backbone Setting Mean IoU
Swami et al. [26] VGG16 Un- 37.1%
CL [34] VGG16 Un- 38.1%
ROAD [6] VGG16 Un- 35.9%
Hung et al. [16] ResNet-101 Semi- 67.7%
FCN VGG16 - 65.3%
Direct Joint Training VGG16 Joint- 64.6%
Target Finetuning VGG16 Joint- 66.0%
FCN+GAN VGG16 Joint- 64.0%
FCN+0-1 Conf. Mask VGG16 Joint- 63.7%
FCN+Focal Loss [19] VGG16 Joint- 66.2%
FCN+W 1 VGG16 Joint- 66.5%
PixelDA [4] VGG16 Joint- 66.1%
Ours with W1 VGG16 Joint- 67.6%
Ours with W19 VGG16 Joint- 68.1%
Table 1. Experimental results of transfer learning using GTAV and
CITYSCAPES (GTAV + CITYSCAPES → CITYSCAPES). W 1
and W19 denote our shared and multi-channel weighting mecha-
nisms, respectively. Un-, Semi- and Joint- are the abbreviations
of unsupervised domain adaptation, semi-supervised learning and
joint learning. * means the model is trained on CITYSCAPES
dataset without source datasets.
Several baseline methods are defined in the following: 1)
Direct Joint Training: we directly combine both synthetic
and real-world data. 2) Target Finetuning: the model is
pretrained with the synthetic data and then finetuned using
the real-world data. 3) FCN+GAN: to verify the effect of
GAN, we design a model only containing FCN segmen-
tation part and GAN part. The VGG16 is adopted as the
backbone. 4) PixelDA [4]: since this work is an unsuper-
vised domain adaptation method which is not compatible
with our setting, we extend it to our problem by giving the
label of both synthetic and real-world data. The segmenta-
tion network uses FCN8s with the backbone of VGG16. 5)
FCN+W 1: to verify the effect of weighting networks, we
design a model only containing FCN segmentation part and
W 1 part. The VGG16 is adopted as the backbone.
We also compare with other methods, which focus on
the unsupervised domain adaptation [6, 26, 34] and semi-
supervised learning [16], to demonstrate the superiority of
our learning scheme.
GTAV + CITYSCAPES → CITYSCAPES. In this ex-
periment, we use the GTAV as our source dataset, and
CITYSCAPES as our target dataset. As shown in Table 1,
our model achieves better performance (mIoU = 68.1) com-
pared with baselines. Several conventional methods for
joint learning and finetuning perform comparable results
with original FCN, which indicates that direct training with
synthetic data does not benefit the model on real domain.
Compared with other transfer learning setting, including
unsupervised domain adaptation [6, 26, 34] and semi-
Method Setting Mean IoU
Swami et al. [26] Un- 34.8%
CL [34] Un- 34.2%
ROAD [6] Un- 36.2%
FCN - 65.3%
Direct Joint Training Joint- 62.9%
Target Finetuning Joint- 64.8%
FCN+GAN Joint- 62.6%
PixelDA [4] Joint- 64.0%
Ours with W 1 Joint- 66.3%
Ours with W 19 Joint- 66.8%Table 2. Experimental results of joint learning using SYNTHIA
and CITYSCAPES.
Method Setting Mean IoU
FCN - 65.3%
Direct Joint Training Joint- 64.2%
Target Finetuning Joint- 66.5%
FCN+GAN Joint- 64.9%
PixelDA [4] Joint- 65.3%
Ours with W 1 Joint- 68.2%
Ours with W 19 Joint- 68.8%Table 3. Experimental results of joint learning using GTAV, SYN-
THIA and CITYSCAPES.
supervised learning [16], our weighting network learning
from both domains achieves better performance without
introducing any extra cost. By comparing FCN+W 1 to
FCN+GAN, we can find that the proposed hierarchical
weighting network is more crucial than GAN, which in-
dicates the effectiveness of weighting network for trans-
fer learning. PixelDA [4] learns a pixel-space transforma-
tion, which achieves an improvement of 2.1 compared with
FCN+GAN. Comparing to two weighting baselines, includ-
ing 0-1 Confidence Mask and Focal loss [19], our method
achieves better performance. By incorporating the weight-
ing network to selectively learn from the synthetic pixel, our
proposed method is more effective to mine the knowledge
from both domains. The results demonstrate that it performs
better than existing methods, with an improvement of 4.1
over FCN+GAN and 2.0 over [4].
SYNTHIA + CITYSCAPES → CITYSCAPES. We fol-
low the experiment setting as previous and choose 19
classes as the label in both SYNTHIA and CITYSCAPES
datasets. We report the results of joint learning using SYN-
THIA and CITYSCAPES in Table 2. We find that simi-
lar conclusions could be reached from results. It is noted
that due to the large domain gap, direct joint training wors-
ens the results of original FCN. The multi-channel weight-
ing map (Ours with W 1) shows better performance than the
shared weighting maps, while both methods have a signifi-
cant improvement than the baseline method.
4365
Method Single Hier Mean IoU
FCN 65.3%
Ours with W 1√
66.7%
Ours with W 1√
67.6%
Ours with W 19√
66.9%
Ours with W 19√
68.1%Table 4. Ablation experiment of single VS hierarchical weighting
network using GTAV + CITYSCAPES → CITYSCAPES.
GTAV + SYNTHIA + CITYSCAPES→ CITYSCAPES.
To verify the robustness of our model, we design this joint
learning experiments with multiple synthetic datasets and
single real-world dataset. In this experiment, the model is
trained by fist using GTAV as the source dataset and then
using GTAV + SYN as the source dataset. As shown in Ta-
ble 3, with multiple synthetic datasets, our proposed model
is able to consistently achieve the better performance, which
demonstrates its robustness and high flexibility in the com-
plicated settings. In such setting, PixelDA [4] even de-
livers a worse result (mIoU=65.3) compared with the re-
sult in Table 1 (mIoU=66.1) , which indicates that learn-
ing from synthetic data without selection might bias to the
source domain and possess limited robustness when pro-
cessing large amount of labeled synthetic data from mul-
tiple sources. Therefore, compared with PixelDA [4], our
method has a performance gain of 3.5 points, validating the
effectiveness of the proposed weighting networks. By com-
bining the GTAV and SYNTHIA datasets as the source do-
main, our model obtains 0.6 and 0.7 points improvement
respectively comparing with the performance of the model
trainined on the single dataset, which shows that the knowl-
edge mined by our method focuses on the similarity of the
target domain and they can promote each other when they
are combined together.
4.2. Ablation Studies
In this section, we perform the ablation experiment to
verify the effect of hierarchical-level weighting network.
The ablation experiment is conducted on the GTAV dataset
and CITYSCAPES dataset. We compare the hierarchi-
cal weighting networks with single-level (pixel-level only)
weighting network. In the Table 4, it can be observed
that the hierarchical mechanism performs consistently bet-
ter (0.9 and 1.2 gain for W 1 and W 19, respectively) than the
single pixel-wise mechanism, which demonstrates that the
hierarchical weighting network possessing both local and
global information enhances the semantic segmentation.
4.3. Discussion
In this section, we design several experiments to verify
the capability of our model. We first visualize the weighting
maps generated by hierarchical weighting network to dis-
play how our model measures the similar regions and then
Data Amount 1/8 1/4 1/2 Full
Mean IoU 53.4% 57.7% 64.9% 68.1%Table 5. Experimental results of GTAV + CITYSCAPES →
CITYSCAPES using different amounts of real-world images.
Note that we use the proposed model, i.e. Ours with W19, and
all synthetic data from GTAV are used during training.
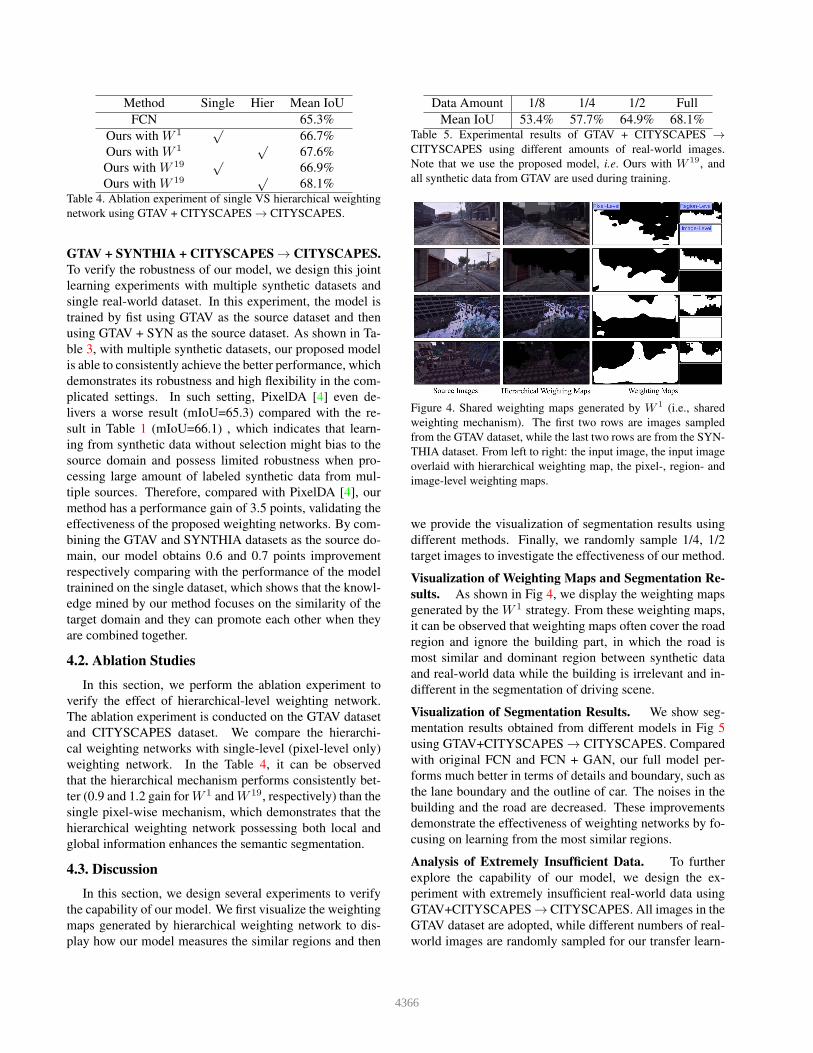
Figure 4. Shared weighting maps generated by W1 (i.e., shared
weighting mechanism). The first two rows are images sampled
from the GTAV dataset, while the last two rows are from the SYN-
THIA dataset. From left to right: the input image, the input image
overlaid with hierarchical weighting map, the pixel-, region- and
image-level weighting maps.
we provide the visualization of segmentation results using
different methods. Finally, we randomly sample 1/4, 1/2
target images to investigate the effectiveness of our method.
Visualization of Weighting Maps and Segmentation Re-
sults. As shown in Fig 4, we display the weighting maps
generated by the W 1 strategy. From these weighting maps,
it can be observed that weighting maps often cover the road
region and ignore the building part, in which the road is
most similar and dominant region between synthetic data
and real-world data while the building is irrelevant and in-
different in the segmentation of driving scene.
Visualization of Segmentation Results. We show seg-
mentation results obtained from different models in Fig 5
using GTAV+CITYSCAPES→ CITYSCAPES. Compared
with original FCN and FCN + GAN, our full model per-
forms much better in terms of details and boundary, such as
the lane boundary and the outline of car. The noises in the
building and the road are decreased. These improvements
demonstrate the effectiveness of weighting networks by fo-
cusing on learning from the most similar regions.
Analysis of Extremely Insufficient Data. To further
explore the capability of our model, we design the ex-
periment with extremely insufficient real-world data using
GTAV+CITYSCAPES→ CITYSCAPES. All images in the
GTAV dataset are adopted, while different numbers of real-
world images are randomly sampled for our transfer learn-
4366

Figure 5. We show the segmentation results of different models. From left to right, the images are extracted from Target Image, Ground
Truth, FCN, FCN+GAN, Ours with W1. Our full model achieves the better results with more detailed boundary.
ing scheme. As shown in Table 5, our model using 1/2 real-
world images achieves comparable performance against the
FCN+GAN, and only 4% worse than the model using full
real-world images, which demonstrates that our model is
capable and applicable with the extremely insufficient data.
5. Conclusion
In this paper, we introduce a new transfer learning
method with both real and synthetic images for semantic
segmentation. We mitigate the domain gap between insuf-
ficient real data and abundant synthetic data by adaptively
selecting similar synthetic pixels for learning. Hierarchical
weighting networks are used to score how similar the syn-
thetic pixels are to real ones, at pixel-, region- and image-
levels respectively, which helps us adapt to target real im-
ages. Also, we learn weighting networks and segmentation
network jointly in an end-to-end manner. Extensive exper-
iments demonstrate that our proposed method outperforms
other important baselines by large margins, espetially, mul-
tiple source datasets achieves more improvements in both
W 1 and W 19 strategy. Our method can also learn from ex-
tremely limited real images, and show the potential to learn
from multiple data sources.
Acknowledgement
This paper is carried out at SenseTime Research in Bei-
jing, China and is partially funded by National Social Sci-
ence Foundation of China No. 18ZD22 and Science and
Technology Commission of Pudong Municipality Program
PKJ2018-Y46.
4367

References
[1] Hossein Azizpour, Ali Sharif Razavian, Josephine Sullivan,
Atsuto Maki, and Stefan Carlsson. From generic to specific
deep representations for visual recognition. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence(PAMI),
pages 1–1, 2015.
[2] Hossein Azizpour, Ali Sharif Razavian, Josephine Sullivan,
Atsuto Maki, and Stefan Carlsson. From generic to spe-
cific deep representations for visual recognition. In Proceed-
ings of the IEEE conference on computer vision and pattern
recognition workshops, pages 36–45, 2015.
[3] Shai Ben-David, John Blitzer, Koby Crammer, Alex
Kulesza, Fernando Pereira, and Jennifer Wortman Vaughan.
A theory of learning from different domains. Machine learn-
ing, 79(1-2):151–175, 2010.
[4] Konstantinos Bousmalis, Nathan Silberman, David Dohan,
Dumitru Erhan, and Dilip Krishnan. Unsupervised pixel-
level domain adaptation with generative adversarial net-
works. In IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), 2017.
[5] Liang Chieh Chen, Yukun Zhu, George Papandreou, Florian
Schroff, and Hartwig Adam. Encoder-decoder with atrous
separable convolution for semantic image segmentation. In
arXiv preprint arXiv:1802.02611, 2018.
[6] Yuhua Chen, Wen Li, and Luc Van Gool. Road: Reality ori-
ented adaptation for semantic segmentation of urban scenes.
In Proceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pp. 7892-7901, 2018.
[7] Marius Cordts, Mohamed Omran, Sebastian Ramos, Timo
Rehfeld, Markus Enzweiler, Rodrigo Benenson, Uwe
Franke, Stefan Roth, and Bernt Schiele. The cityscapes
dataset for semantic urban scene understanding. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion(CVPR), pages 3213–3223, 2016.
[8] Wenyuan Dai, Qiang Yang, Gui Rong Xue, and Yong Yu.
Boosting for transfer learning. In IEEE International Con-
ference on Machine Learning(ICML), pages 193–200, 2007.
[9] German Ros Felipe Codevilla Antonio Lopez Dosovitskiy,
Alexey and Vladlen Koltun. Carla: An open urban driving
simulator. arXiv preprint arXiv:1711.03938, 2018.
[10] Yaroslav Ganin and Victor Lempitsky. Unsupervised domain
adaptation by backpropagation. IEEE International Confer-
ence on Machine Learning(ICML), 2015.
[11] Yaroslav Ganin, Evgeniya Ustinova, Hana Ajakan, Pas-
cal Germain, Hugo Larochelle, Francois Laviolette, Mario
Marchand, and Victor Lempitsky. Domain-adversarial train-
ing of neural networks. The Journal of Machine Learning
Research(JMLR), 17(1):2096–2030, 2016.
[12] Weifeng Ge and Yizhou Yu. Borrowing treasures from the
wealthy: Deep transfer learning through selective joint fine-
tuning. In IEEE Conference on Computer Vision and Pattern
Recognition(CVPR), volume 6, 2017.
[13] Kaiming He, Georgia Gkioxari, Piotr Dollar, and Ross Gir-
shick. Mask r-cnn. IEEE Transactions on Pattern Analysis
Machine Intelligence(TPAMI), PP(99):1–1, 2017.
[14] Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian
Sun. Deep residual learning for image recognition. In
IEEE Conference on Computer Vision and Pattern Recog-
nition(CVPR), pages 770–778, 2016.
[15] Seunghoon Hong, Junhyuk Oh, Honglak Lee, and Bohyung
Han. Learning transferrable knowledge for semantic seg-
mentation with deep convolutional neural network. In Pro-
ceedings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 3204–3212, 2016.
[16] Wei-Chih Hung, Yi-Hsuan Tsai, Yan-Ting Liou, Yen-Yu
Lin, and Ming-Hsuan Yang. Adversarial learning for
semi-supervised semantic segmentation. arXiv preprint
arXiv:1802.07934, 2018.
[17] Diederik P. Kingma and Jimmy Ba. Adam: A method for
stochastic optimization. Computer Science, 2014.
[18] Chuan Li and Michael Wand. Precomputed real-time texture
synthesis with markovian generative adversarial networks. In
ECCV, pages 702–716. Springer, 2016.
[19] Tsung-Yi Lin, Priya Goyal, Ross Girshick, Kaiming He, and
Piotr Dollar. Focal loss for dense object detection. In IEEE
International Conference on Computer Vision(ICCV), pages
2980–2988, 2017.
[20] Ming-Yu Liu and Oncel Tuzel. Coupled generative adversar-
ial networks. In Advances in neural information processing
systems, pages 469–477, 2016.
[21] Ziwei Liu, Xiaoxiao Li, Ping Luo, Chen-Change Loy, and
Xiaoou Tang. Semantic image segmentation via deep pars-
ing network. In Proceedings of the IEEE international con-
ference on computer vision, pages 1377–1385, 2015.
[22] Jonathan Long, Evan Shelhamer, and Trevor Darrell. Fully
convolutional networks for semantic segmentation. In
CVPR, pages 3431–3440, 2015.
[23] Yishay Mansour, Mehryar Mohri, and Afshin Rostamizadeh.
Domain adaptation: Learning bounds and algorithms. arXiv
preprint arXiv:0902.3430, 2009.
[24] Stephan R Richter, Vibhav Vineet, Stefan Roth, and Vladlen
Koltun. Playing for data: Ground truth from com-
puter games. In European Conference on Computer Vi-
sion(ECCV), pages 102–118. Springer, 2016.
[25] German Ros, Laura Sellart, Joanna Materzynska, David
Vazquez, and Antonio M Lopez. The synthia dataset: A large
collection of synthetic images for semantic segmentation of
urban scenes. In IEEE Conference on Computer Vision and
Pattern Recognition(CVPR), pages 3234–3243, 2016.
[26] Swami Sankaranarayanan, Yogesh Balaji, Arpit Jain,
Ser Nam Lim, and Rama Chellappa. Learning from syn-
thetic data: Addressing domain shift for semantic segmen-
tation. In The IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), 2018.
[27] Nikolaos Sarafianos, Michalis Vrigkas, and Ioannis A. Kaka-
diaris. Adaptive svm+: Learning with privileged information
for domain adaptation. In IEEE International Conference on
Computer Vision Workshop(ICCV Workshop), pages 2637–
2644, 2017.
[28] Karen Simonyan and Andrew Zisserman. Very deep convo-
lutional networks for large-scale image recognition. arXiv
preprint arXiv:1409.1556, 2014.
[29] Riccardo Volpi, Pietro Morerio, Silvio Savarese, and Vittorio
Murino. Adversarial feature augmentation for unsupervised
domain adaptation. arXiv preprint arXiv:1711.08561, 2018.
4368

[30] Cihang Xie, Jianyu Wang, Zhishuai Zhang, Yuyin Zhou,
Lingxi Xie, and Alan Yuille. Adversarial examples for se-
mantic segmentation and object detection. IEEE Interna-
tional Conference on Computer Vision(ICCV), pages 1378–
1387, 2017.
[31] Hang Zhang, Kristin Dana, Jianping Shi, Zhongyue Zhang,
Xiaogang Wang, Ambrish Tyagi, and Amit Agrawal. Con-
text encoding for semantic segmentation. IEEE Conference
on Computer Vision and Pattern Recognition(CVPR), 2018.
[32] Hengshuang Zhao, Jianping Shi, Xiaojuan Qi, Xiaogang
Wang, and Jiaya Jia. Pyramid scene parsing network. In
IEEE Conference on Computer Vision and Pattern Recogni-
tion(CVPR), pages 2881–2890, 2017.
[33] Xinge Zhu, Jiangmiao Pang, Ceyuan Yang, Jianping Shi, and
Dahua Lin. Adapting object detectors via selective cross-
domain alignment. In IEEE Conference on Computer Vision
and Pattern Recognition, 2019.
[34] Xinge Zhu, Hui Zhou, Ceyuan Yang, Jianping Shi, and
Dahua Lin. Penalizing top performers: Conservative loss for
semantic segmentation adaptation. In Proceedings of the Eu-
ropean Conference on Computer Vision (ECCV), pages 568–
583, 2018.
4369