norma iso introduccion a los estandares de balanceo n 910 np and 2nd cd 19499
TRANSCRIPT

FORM 4 (ISO) Page 1 of 3 Version 2001-07
NEW WORK ITEM PROPOSAL
Date of presentation 2005-01=19
Reference number (to be given by the Secretariat)
Proposer TC 108 ISO/TC 108 N 910
Secretariat ANSI
A proposal for a new work item within the scope of an existing committee shall be submitted to the secretariat of that committee with a copy to the Central Secretariat and, in the case of a subcommittee, a copy to the secretariat of the parent technical committee. Proposals not within the scope of an existing committee shall be submitted to the secretariat of the ISO Technical Management Board. The proposer of a new work item may be a member body of ISO, the secretariat itself, another technical committee or subcommittee, or organization in liaison, the Technical Management Board or one of the advisory groups, or the Secretary-General. The proposal will be circulated to the P-members of the technical committee or subcommittee for voting, and to the O-members for information. See overleaf for guidance on when to use this form. IMPORTANT NOTE: Proposals without adequate justification risk rejection or referral to originator. Guidelines for proposing and justifying a new work item are given overleaf. Proposal (to be completed by the proposer)
Title of proposal (in the case of an amendment, revision or a new part of an existing document, show the reference number and current title)
English title 2nd CD 19499 Mechanical vibration - Balancing and balancing standards - Introduction
French title (if available)
2nd CD 19499 Vibrations mécaniques - Équilibrage et normes d'équilibrage - Introduction
Scope of proposed project This International Standard provides an introduction to balancing and directs the user through the available standards associated with rotor balancing and gives guidance on which of these standards should be used. Individual procedures are not included here as these will be found in the appropriate International Standard.
Concerns known patented items (see ISO/IEC Directives Part 1 for important guidance)
Yes No If "Yes", provide full information as annex
Envisaged publication type (indicate one of the following, if possible) International Standard Technical Specification Publicly Available Specification Technical Report
Purpose and justification (attach a separate page as annex, if necessary) During the past 25 years Technical Committee ISO/TC 108 established many standards on balancing. For those not familiar with the range of standards available it is difficult to find the topics and guidelines they are looking for.
This International Standard guides the reader into the field of balancing, answers some basic questions, and gives an overview over existing balancing standards.
Balancing is explained in a general manner, as well as the unbalance of a rotor. A certain representation of the unbalance is recommended for an easier understanding of the necessary unbalance corrections. Target date for availability (date by which publication is considered to be necessary) 4 year time frame
Relevant documents to be considered
Relationship of project to activities of other international bodies
Liaison organizations
Need for coordination with: IEC CEN Other (please specify)

New work item proposal
FORM 4 (ISO) Page 2 of 3
Preparatory work (at a minimum an outline should be included with the proposal)
A draft is attached An outline is attached. It is possible to supply a draft by
The proposer or the proposer's organization is prepared to undertake the preparatory work required Yes No
Proposed Project Leader (name and address) R. Herbert
Innogy PLC
Windmill Hill Business Park
Swindon, Wiltshire SN5 6PB
UNITED KINGDOM
Voice: +44-1-793-89-2364
Email: [email protected]
Name and signature of the Proposer (include contact information) Susan Blaeser
Secretary, ISO/TC 108
Comments of the TC or SC Secretariat Supplementary information relating to the proposal
This proposal relates to a new ISO document;
This proposal relates to the amendment/revision of an existing ISO document;
This proposal relates to the adoption as an active project of an item currently registered as a Preliminary Work Item;
This proposal relates to the re-establishment of a cancelled project as an active project. Other: This work item has not yet been cancelled but, under the 5-year rule, it will
be cancelled before the work can be completed. This proposal is to simultaneously confirm 2nd CD 19499 as an active work item
in the work programme of TC 108 AND ALSO approve the attached 2nd CD for further processing as a DIS. Please be sure to respond to question 3.3.2 on the voting form.
Voting information The ballot associated with this proposal comprises a vote on:
Adoption of the proposal as a new project
Adoption of the associated draft as a committee draft (CD) (see ISO Form 5, question 3.3.1)
Adoption of the associated draft for submission for the enquiry vote (DIS or equivalent) (see ISO Form 5, question 3.3.2)
Other:
Annex(es) are included with this proposal (give details) 2nd CD 19499
Date of circulation
2005-01-19
Closing date for voting
2005-04-19
Signature of the TC or SC Secretary
Susan Blaeser
Use this form to propose: a) a new ISO document (including a new part to an existing document), or the amendment/revision of an existing ISO document; b) the establishment as an active project of a preliminary work item, or the re-establishment of a cancelled project; c) the change in the type of an existing document, e.g. conversion of a Technical Specification into an International Standard. This form is not intended for use to propose an action following a systematic review - use ISO Form 21 for that purpose. Proposals for correction (i.e. proposals for a Technical Corrigendum) should be submitted in writing directly to the secretariat concerned.
Guidelines on the completion of a proposal for a new work item (see also the ISO/IEC Directives Part 1) a) Title: Indicate the subject of the proposed new work item. b) Scope: Give a clear indication of the coverage of the proposed new work item. Indicate, for example, if this is a proposal for a new document, or a proposed change (amendment/revision). It is often helpful to indicate what is not covered (exclusions). c) Envisaged publication type: Details of the types of ISO deliverable available are given in the ISO/IEC Directives, Part 1 and/or the associated ISO Supplement.

New work item proposal
FORM 4 (ISO) Page 3 of 3
d) Purpose and justification: Give details based on a critical study of the following elements wherever practicable. Wherever possible reference should be made to information contained in the related TC Business Plan. 1) The specific aims and reason for the standardization activity, with particular emphasis on the aspects of standardization to be covered, the problems it is expected to solve or the difficulties it is intended to overcome. 2) The main interests that might benefit from or be affected by the activity, such as industry, consumers, trade, governments, distributors. 3) Feasibility of the activity: Are there factors that could hinder the successful establishment or general application of the standard? 4) Timeliness of the standard to be produced: Is the technology reasonably stabilized? If not, how much time is likely to be available before advances in technology may render the proposed standard outdated? Is the proposed standard required as a basis for the future development of the technology in question? 5) Urgency of the activity, considering the needs of other fields or organizations. Indicate target date and, when a series of standards is proposed, suggest priorities. 6) The benefits to be gained by the implementation of the proposed standard; alternatively, the loss or disadvantage(s) if no standard is established within a reasonable time. Data such as product volume or value of trade should be included and quantified. 7) If the standardization activity is, or is likely to be, the subject of regulations or to require the harmonization of existing regulations, this should be indicated. If a series of new work items is proposed having a common purpose and justification, a common proposal may be drafted including all elements to be clarified and enumerating the titles and scopes of each individual item. e) Relevant documents: List any known relevant documents (such as standards and regulations), regardless of their source. When the proposer considers that an existing well-established document may be acceptable as a standard (with or without amendment), indicate this with appropriate justification and attach a copy to the proposal. f) Cooperation and liaison: List relevant organizations or bodies with which cooperation and liaison should exist.


FORM 7 (ISO) Version/V97.1.2
WARNING: This document is not an International Standard. It is distributed for review and comment. It is subject to change without notice and may not be referred to as an International Standard.
ISO/TC 108/SC
Title
Mechanical vibration and shock
Secretariat
ANSI
Circulated to P- and O-members, and to technical committees and organizations in liaison for:
discussion at [venue/date of meeting]
comments by [date]
approval for registration as a DIS in accordance with 2.5.6 of part 1 of the ISO/IEC Directives, by
2005-04-19 [date]
(P-members vote only: ballot form attached)
P-members of the technical committee or subcommittee concerned have an obligation to vote.
Title (English)
2nd CD 19499 Mechanical vibration - Balancing and balancing standards - Introduction
Title (French)
2nd CD 19499 Vibrations mécaniques - Équilibrage et normes d'équilibrage - Introduction
Reference language version: English French Russian
Introductory note
An earlier version of this document was circulated to TC 108/SC 1 as a 1st CD for comments only, as document SC 1 N 302, during 2003. The resolution of the comments has required the working group to do extensive revision and thus the ISO timeframes have been exceeded. This work item will soon be deleted from the TC 108 work programme under the 5-year rule. At its Adelaide meeting in 2004, TC 108 adopted resolution 2004/24 to confirm this work item in the work programme, but this resolution is insufficient to satisfy the ISO requirements. Thus, at this time you are asked to vote both on the approval of the new work item proposal, which will formally confirm the work item in the TC 108 work programme and also on the approval of the attached CD to move forward to as a DIS. To accomplish this, you are requested to respond to question 3.3.2 on the voting form. Votes and comments should be submitted no later than 2005-04-19. If this ballot is approved, WG 31 will meet in conjunction with the TC 108 meeting in Mississauga, Ontario Canada, during the week of 29 August – 2 September to review the comments received and develop the DIS.
COMMITTEE DRAFT
COMMITTEE DRAFT ISO/CD 19499.2
Date 2005-01-19
Reference number ISO/TC 108 /SC N 910
Supersedes document
ISO/TC 108/SC 1 N 302

FORM 7 (ISO) Version/V97.1.2
Copyright notice
This ISO document is a committee draft and is copyright protected by ISO. While the reproduction of committee drafts in any form for use by participants in the ISO standards development process is permitted without prior permission from ISO, neitherthis document nor any extract from it may be reproduced, stored or transmitted in any form for any other purpose without priorwritten permission from ISO.
Requests for permission to reproduce this document for the purpose of selling it should be addressed to the secretariat indicatedabove or to ISO’s member body in the country of the requester.
Reproduction for sales purposes may be subject to royalty payments or a licensing agreement.
Violators may be prosecuted.
© ISO 2005 – All rights reserved

ISO 2005 — All rights reserved
Document type: International Standard Document subtype: Document stage: (30) Committee Document language: E N 910 2nd CD 19499.doc STD Version 2.1
ISO /TC 108 N 910 Date: January 2005
ISO/CD 19499.2
ISO /TC 108/WG 31
Secretariat: ANSI
Mechanical vibration — Balancing and balancing standards — Introduction
Vibrations mécaniques — Équilibrage et normes d'équilibrage — Introduction

ISO/CD 19499.2:2005
ii ISO 2005 — All rights reserved
Copyright notice
This ISO document is a working draft or committee draft and is copyright-protected by ISO. While the reproduction of working drafts or committee drafts in any form for use by participants in the ISO standards development process is permitted without prior permission from ISO, neither this document nor any extract from it may be reproduced, stored or transmitted in any form for any other purpose without prior written permission from ISO.
Requests for permission to reproduce this document for the purpose of selling it should be addressed as shown below or to ISO's member body in the country of the requester:
Copyright Manager ANSI 25 W. 43rd St. New York, NY 10036 Reproduction for sales purposes may be subject to royalty payments or a licensing agreement.
Violators may be prosecuted.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved iii
Contents Page
Foreword .........................................................................................................................................................iv
Introduction......................................................................................................................................................v
1 Scope...................................................................................................................................................1
2 Normative references .........................................................................................................................1
3 Definitions ...........................................................................................................................................2
4 Fundamentals of balancing................................................................................................................2 4.1 General ................................................................................................................................................2 4.2 Unbalance distribution .......................................................................................................................2 4.3 Unbalance representation ..................................................................................................................3
5 Balancing considerations ..................................................................................................................3 5.1 General ................................................................................................................................................3 5.2 Rotors with rigid behaviour................................................................................................................3 5.3 Rotors with flexible behaviour ...........................................................................................................4 5.4 Service speed rotor balancing ...........................................................................................................5 5.5 Rotors with special behaviour ...........................................................................................................5 5.6 Examples of typical rotor behaviours ...............................................................................................6 5.7 Influencing factors..............................................................................................................................7
6 Balance tolerances .............................................................................................................................7 6.1 General ................................................................................................................................................7 6.2 Vibration limits ....................................................................................................................................7 6.3 Permissible residual unbalances.......................................................................................................8
7 Selection of a balancing procedure...................................................................................................8 7.1 General ................................................................................................................................................8 7.2 Selection of a balancing procedure when none is specified...........................................................8
8 ISO balancing standards ..................................................................................................................13 8.1 General ..............................................................................................................................................13 8.2 Vocabulary.........................................................................................................................................13 8.3 Balancing procedures and tolerances ............................................................................................14 8.4 Balancing machines .........................................................................................................................15 8.5 Machine design for balancing..........................................................................................................15 8.6 Machine vibration .............................................................................................................................16
Annex A (informative) Calculation of unbalances .......................................................................................17
Annex B (informative) Examples of different rotor behaviours .................................................................22
Annex C (informative) Procedure to determine if a rotor is rigid or flexible..............................................25
Annex D (informative) How to determine the rotors flexibility, based on an estimation from its geometric design ..............................................................................................................................27
Bibliography...................................................................................................................................................30
ISO/CD 19499.2:2005
iv ISO 2005 — All rights reserved
Foreword
ISO (the International Organization for Standardization) is a worldwide federation of national standards bodies (ISO member bodies). The work of preparing International Standards is normally carried out through ISO technical committees. Each member body interested in a subject for which a technical committee has been established has the right to be represented on that committee. International organizations, governmental and non-governmental, in liaison with ISO, also take part in the work. ISO collaborates closely with the International Electrotechnical Commission (IEC) on all matters of electrotechnical standardization.
International Standards are drafted in accordance with the rules given in the ISO/IEC Directives, Part 2.
The main task of technical committees is to prepare International Standards. Draft International Standards adopted by the technical committees are circulated to the member bodies for voting. Publication as an International Standard requires approval by at least 75 % of the member bodies casting a vote.
Attention is drawn to the possibility that some of the elements of this document may be the subject of patent rights. ISO shall not be held responsible for identifying any or all such patent rights.
ISO 19499 was prepared by Technical Committee ISO/TC 108, Mechanical vibration and shock.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved v
Introduction
During the past 25 years Technical Committee ISO/TC 108 established many standards on balancing. For those not familiar with the range of standards available it is difficult to find the topics and guidelines they are looking for.
This International Standard guides the reader into the field of balancing, answers some basic questions, and gives an overview over existing balancing standards.
Balancing is explained in a general manner, as well as the unbalance of a rotor. A certain representation of the unbalance is recommended for an easier understanding of the necessary unbalance corrections.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 1
Mechanical vibration — Balancing and balancing standards — Introduction
1 Scope
This International Standard provides an introduction to balancing and directs the user through the available standards associated with rotor balancing and gives guidance on which of these standards should be used. Individual procedures are not included here as these will be found in the appropriate International Standard.
2 Normative references
The following referenced documents are indispensable for the application of this document. For dated references, only the edition cited applies. For undated references, the latest edition of the referenced document (including any amendments) applies.
ISO 1925:2001, Mechanical vibration — Balancing — Vocabulary
ISO 1940-1:2003, Mechanical vibration — Balance quality requirements for rotors in a constant (rigid) state — Part 1: Specification and verification of balance tolerances (Including Technical Corrigendum 1)
ISO 1940-2:1997, Mechanical vibration — Balance quality requirements of rigid rotors — Part 2: Balance errors
ISO 2041:1990, Vibration and shock — Vocabulary
ISO 2953:1999, Mechanical vibration — Balancing machines — Description and evaluation
ISO 3719:1994, Mechanical vibration — Symbols for balancing machines and associated instrumentation
ISO 7475:2002, Mechanical vibration — Balancing machines — Enclosures and other protective measures for the measuring station
ISO 7919 (all parts), Mechanical vibration of non-reciprocating machines — Evaluation of machine vibration by measurements on rotating shafts
ISO 8821:1989, Mechanical vibration — Balancing — Shaft and fitment key convention
ISO 10814:1996, Mechanical vibration — Susceptibility and sensitivity of machines to unbalance
ISO 10816 (all parts), Mechanical vibration — Evaluation of machine vibration by measurements on non-rotating parts
ISO 11342:1998, Mechanical vibration — Methods and criteria for the mechanical balancing of flexible rotors (Including Technical Corrigendum 1)
ISO 20806:2004, Mechanical vibration — Criteria and safeguards for the in-situ balancing of medium and large rotors

ISO/CD 19499.2:2005
2 ISO 2005 — All rights reserved
3 Definitions
For the purpose of this document, the terms and definitions given in ISO 1925 and ISO 2041 apply.
4 Fundamentals of balancing
4.1 General
Balancing is a procedure by which the mass distribution of a rotor (or part or module) is checked and, if necessary, adjusted to ensure, that balance tolerances are met.
Rotor unbalance may be caused by many reasons including design, material, manufacture and assembly, wear during operation or an operational event. Every rotor, even in series production, has an individual unbalance distribution.
New rotors are commonly balanced by the manufacturer in specially designed balancing machines before installation into their operational environment. Following rework or repair rotors can be re-balanced in a balancing machine or, where appropriate facilities are not available the rotor can be balanced in-situ, ISO 20806. In the latter case the rotor is held in its normal service bearings and support structure and installed within its operational drive train.
The unbalance on the rotor generates forces when it is rotated in a balancing machines or in situ. These forces can be directly measured by force gauges mounted on the structures supporting the bearings or indirectly by measuring either the motion of the pedestal or the shaft. From these measurements the unbalance can be calculated and mass corrections achieved by adding, removing or shifting of masses on the rotor. Depending on the particular balancing task the corrections are performed in one, two or more correction planes.
4.2 Unbalance distribution
In reality unbalance is caused by an infinite number of unbalance vectors, distributed along the shaft axis of the rotor. This can be represented by a finite number of unbalance vectors, of different size and angular direction, if a lumped-mass model is used to represent the rotor. Such a distribution is illustrated in Figure 1.
1
2
3
4
5 6
7
8
9 10z
y
x
Figure 1 — Unbalance distribution in a rotor modelled as 10 elements

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 3
If all unbalance vectors were corrected in their respective planes, then the rotor would be perfectly balanced. In practice it is not possible to measure these individual unbalances and it is not necessary. A more condensed description is needed, leading to practical balancing procedures.
4.3 Unbalance representation
Rotor unbalance can be expressed by the following types of unbalance:
a) resultant unbalance, Ur, is the vector sum of all unbalance vectors distributed along the rotor.
b) resultant moment unbalance, Pr, is the vector sum of the moments of all the unbalance vectors distributed along the rotor about the plane of the resultant unbalance.
c) modal unbalance, Un, is that unbalance which affects only the nth principal mode of the deflection configuration of a rotor/bearing system
Mathematical and graphical representations of unbalances are shown in Annex A.
NOTE Resultant unbalance (a) and resultant moment unbalance (b) can be combined and represented by two unbalances in two arbitrarily chosen planes, perpendicular to the shaft axis.
5 Balancing considerations
5.1 General
In the past the International Standards classified all rotors to be either rigid or flexible and procedures for these two main classes of rotor are given in ISO 1940-1 and ISO 11342 respectively, Table 1. However, the simple rigid/flexible classification is a gross simplification, which can lead to a misinterpretation and suggests that the rotor’s balance classification is only dependent on the physical construction of the rotor. Unbalance is an intrinsic property of the rotor. Its measured response, or behaviour in its normal operating environment is affected by the dynamics of the bearings and support structure, and by its operating speed. Further, the quality to which the rotor is expected to run and the magnitude and distribution of the initial unbalance along the rotor will dictate which balancing procedures are necessary to balance the rotor, see Table 1.
5.2 Rotors with rigid behaviour
An ideal rotor, with rigid behaviour, on elastic supports will undergo displacements that are combinations of the two dynamic rigid body modes, as seen in Figure 2 for a simple symmetric rotor with unbalance. All deflections of the rotor arise from movements of the bearings and their support structure.
In reality no rotor will be totally rigid and will have small flexural deflections in relation to the gross rigid body motion of the rotor. However, the rotor can be regarded as rigid provided these deflections caused by a given unbalance distribution are below the required tolerances at any speed up to the maximum service speed. The majority of such rotors and, indeed the majority of small manufactured rotors, can be balanced as rigid rotors, with the requirements of ISO 1940-1. This aims at balancing the resultant unbalance, with at least a single-plane balance correction, or the dynamic unbalance, with a two-plane balance correction.

ISO/CD 19499.2:2005
4 ISO 2005 — All rights reserved
Figure 2 — Rigid body modes of a symmetric rotor on a symmetric elastic support structure
Table 1 — Overview of balancing procedures
Rotor behaviour Related ISO Standard for Balancing
Balancing task or procedure
Rigid, 5.2 1940-1 One plane, two plane resultant unbalance plus resultant moment unbalance
Six low-speed balancing procedure (A to F)
Flexible, 5.3
A high-speed (multiple-speed) procedure (G)
Service speed, 5.4
Flexible rotor balanced at a single required speed
Service speed balancing procedure (H)
Component Elastic 5.5.2
Rotor where the unbalance changes consistently with speed or other condition.
11342
Fixed speed balancing procedure (I)
Component Seating, 5.5.3
Rotor where the unbalance changes once or only initially with speed or other condition and as a consequence requires further balancing.
11342 or 1940-1 Such rotors need to be taken to the speed or condition at which the balance condition is stabilised and then balanced as appropriate for the behaviour of the rotor, such as rigid or flexible behaviour (No designated procedure in ISO 11342)
5.3 Rotors with flexible behaviour
If the speed range is increased or the tolerance reduced for the same ideal rotor it is necessary to develop flexible behaviour into account. Here the deflection of the rotor is significant and rigid body balancing procedures cannot be adopted to achieve a desired balance condition, Figure 3 shows typical flexural

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 5
modes shapes for a symmetric rotor. For these rotors, exhibiting flexural behaviour the balancing procedures in ISO 11342 must be adopted.
These procedures should be used to balance the resultant unbalance, the resultant moment unbalance and the relevant modal unbalances in one, two or more correction planes.
Figure 3 — Schematic representation of the first three flexural modes of a rotor with flexible behaviour
5.4 Service speed rotor balancing
These rotors are flexible and pass through one or more critical speeds on their way up to service speed. However, due to operating conditions or machine construction, high levels of vibration can be tolerated at the critical speeds and the rotor is only balanced at the service speed.
5.5 Rotors with special behaviour
5.5.1 General
The majority of rotors will exhibit either rigid or flexible behaviours but the following more complex behaviours can exist and must be considered to achieve a successful balance of the rotor.
5.5.2 Component elastic behaviour
These rotors may have a shaft and body construction that either allows for low-speed or high-speed balancing procedures. However, in addition they have one or more components that are either flexible or are flexibly mounted so that the unbalance of the whole system may consistently and repeatable change with speed. Examples of such rotors are rubber bladed fans and single phase induction motors with a centrifugal switch.

ISO/CD 19499.2:2005
6 ISO 2005 — All rights reserved
5.5.3 Component seating behaviour
These rotors may have a construction that allows components on the rotor to settle after reaching a certain speed or other condition. This movement will then become stable after one or just a few events and the components will reach a final position and become re-seated, after which the rotor may require further balancing. Examples are shrunk on turbine discs, built up rotors, copper winding in generators and generators end rings. Subsequent behaviour of the rotor will then dictate the balancing procedure required.
5.6 Examples of typical rotor behaviours
To show typical tendencies, the different behaviours may be imagined by the following rotors, Figure 4:
a) rigid behaviour by a solid gear wheel,
b) flexible behaviour of a disc on an elastic shaft, for example a Laval rotor.
c) component-elastic behaviour by a drum with tie-bars, elastically deflecting under the centrifugal load,
d) seating behaviour by a generator rotor with windings, once for all seating under a certain centrifugal load.
a)
c)
b)
d)
a) rotor with rigid behaviour, b) with flexible behaviour by elastic bending deflection, c) with component-elastic behaviour by deflecting tie-bars at higher speed, and d) with seating behaviour by windings which settle at a certain speed
Figure 4 — Illustrations of typical rotors which can show different behaviours
But such pictures are not sufficient for a full description: obviously, rotors according to Figures 4c and 4d may also show flexible behaviour; on the contrary a rotor according to Figure 4b could be a low-speed fan without considerable flexible behaviour, i.e. a rotor with a rigid behaviour. Details of these types of behaviour are further explained in Annex B.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 7
5.7 Influencing factors
5.7.1 General
A rotor’s behaviour can only be described for given conditions. Changing the speed, the support structure or initial unbalance may cause the rotor to adopt a different behaviour and changing the tolerance could change the balancing procedure needed to meet that tolerance.
5.7.2 Tolerances
By simply reducing the balance tolerance it may be necessary to reconsider the rotor’s behaviour and adopt a new procedure to bring the rotor within tolerance, e.g.:
a) A rotor with rigid behaviour, balanced using a single plane procedure to reduce static unbalance, may simply require additional single plane balancing.
b) A rotor with rigid behaviour, balanced using a single plane procedure to reduce static unbalance, may require the rotor to be balanced at two planes to take into account dynamic unbalance.
c) A rotor with rigid behaviour, balanced in two planes to reduce both static and dynamic unbalance, may require flexible behaviour procedures to reduce contributions from the higher flexural modes of the rotor where modal unbalance becomes significant.
d) A rotor with either rigid or flexible behaviour and has been successfully balanced using the appropriate procedure may need to consider more complex procedures to take into account component elastic or component seating behaviours.
e) Where the higher tolerance can only be achieved at a single speed the service speed balancing procedure may need to be considered.
5.7.3 Speed and support conditions
Other changes of rotor behaviour may occur, if operational conditions are changed, e.g. by changing speed or support conditions.
5.7.4 Initial unbalance
The initial unbalance distribution has an influence on the response of the rotor system. It determines, which unbalance, Clause 4, is out of tolerance and therefore needs treatment. Different manufacturing and assembling procedures can lead to different levels of initial unbalance.
6 Balance tolerances
6.1 General
The balancing equipment and techniques available enables unbalances to be reduced to low limits. However, it would be uneconomic to over specify the quality requirements. It is therefore necessary to define the optimum balance quality for the rotor to operate safely in its normal service environment.
6.2 Vibration limits
Predicting in-situ vibration levels from data collected on a balancing machine is complex due to differences between the bearings and the support structure used in the balancing machine and installed condition. Further, the rotor in the balancing machine is tested in isolation and does not include effects from other

ISO/CD 19499.2:2005
8 ISO 2005 — All rights reserved
rotors in the shaft line out, as experienced when installed in its operational environment. However, where detailed information is available concerning these parameters a method to derive these limits is presented in ISO 11342. In-situ vibration limits are presented in the appropriate parts of ISO 7919 and ISO 10816 for shaft and pedestal vibration, respectively, where a vibration level tolerance is stipulated.
Where insufficient detail is available to make these estimates, experience of the balancing machine facility is particularly useful.
6.3 Permissible residual unbalances
There is no easily recognizable relation between the machine vibrations under service conditions and the rotor unbalance. The once-per-revolution vibrations are influenced by the characteristics of the rotor and the machine’s resonant response. Moreover, the overall machine vibrations may be due only in part to the presence of rotor unbalance. Nevertheless guidance for the derivation of permissible residual unbalance tolerances is given as follows:
ISO 1940-1 for a rigid rotor behaviour and
ISO 11342, using tolerance data from ISO 1940-1, for other rotor behaviours.
7 Selection of a balancing procedure
7.1 General
Since there are different balancing procedures available, needing different types of balancing machines and resource input, it is important to select an appropriate procedure, see Table 1, optimising the balancing process to match the balance tolerances required.
Rotors with a rigid behaviour, 5.2, can be balanced using the low-speed balancing guidelines provided in ISO 1940 whereas, in general, rotors with a flexible behaviour, 5.3, should be dealt with in accordance with the guidelines given in ISO 11342. It should be noted that whilst for flexible behaviour it is generally necessary to adopt high-speed balancing techniques (Procedures G to I of ISO 11342), there is a range of such rotors which can be adequately balanced at low speed (Procedures A to F of ISO 11342).
Service speed balancing and procedures for rotors with component elastic behaviours, 5.4 and 5.5.2 respectively, are included in ISO 11342 (Procedures H and I). No designated procedure is available in ISO 11342 for component seating behaviour, 5.5.3.
Where possible consult the rotor manufacturer or the user for a definition of the rotor configuration and a recommended balancing procedure.
7.2 Selection of a balancing procedure when none is specified
7.2.1 Identify the rotor behaviour
Clause 5 introduces the major rotor types and Table 2 gives guidance on both the selection of the balancing procedure together with the expected balancing machine to be used. A consideration of the balance tolerances must be taken into account when identifying the rotor behaviour, as discussed in 7.2.2
Guidance given in Table 2 should be used with care as the ratio of rotor speed to first flexural resonance in-situ is an approximate value. This will be highly dependent on the dynamics of the bearings and their supports, the vibration quality required and detailed design of the rotor.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 9
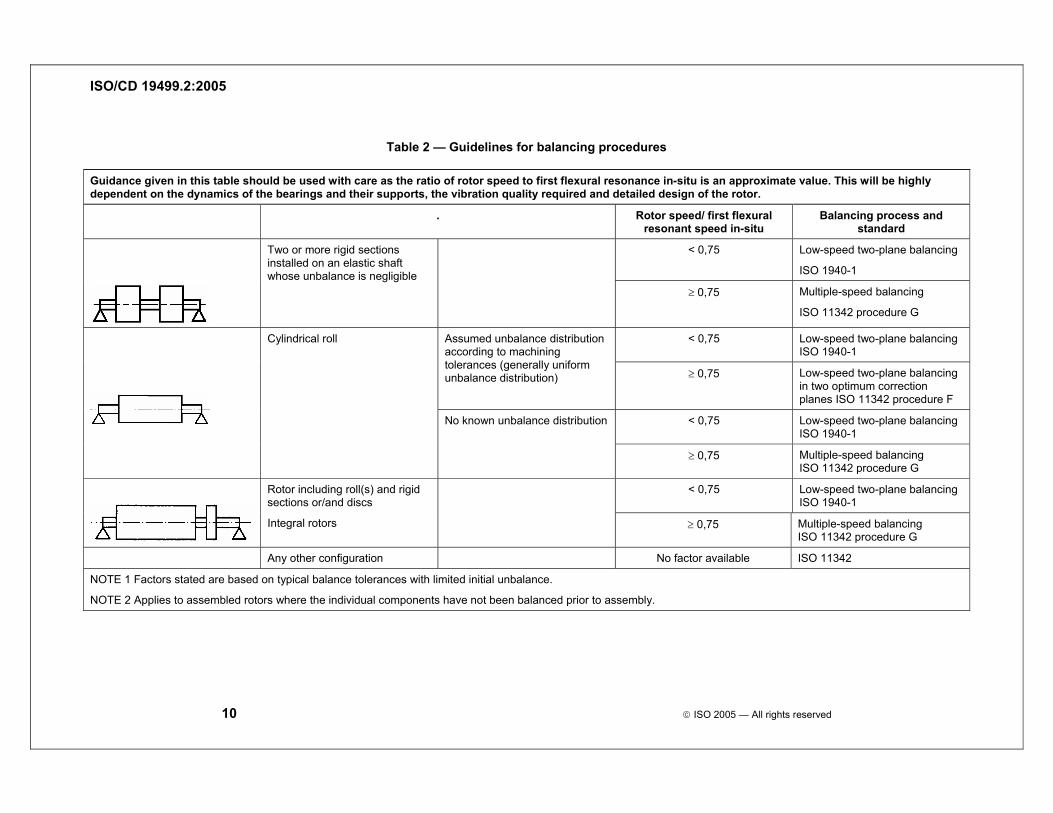
Table 2 — Guidelines for balancing procedures
Guidance given in this table should be used with care as the ratio of rotor speed to first flexural resonance in-situ is an approximate value. This will be highly dependent on the dynamics of the bearings and their supports, the vibration quality required and detailed design of the rotor.
. Rotor speed/ first flexural resonant speed in-situ
Balancing process and standard
Any rotor configuration < 0,30 Low-speed balancing
ISO 1940-1
Disc perpendicular to shaft axis All values
Low-speed single-plane balancing
ISO 1940-1
Single rigid disc installed on an elastic shaft whose unbalance is negligible
Disc with axial run out All values Low-speed two-plane balancing ISO 1940-1
Both disc perpendicular to shaft axis All values Low-speed two-plane balancing
ISO 1940-1
< 0,75 Low-speed two-plane balancing
ISO 1940-1
Two rigid discs installed on an elastic shaft whose unbalance is negligible
One or both disc(s) with axial run out
≥ 0,75 Multiple-speed balancing
ISO 11342 procedure G
< 0,75 Low-speed two-plane balancing
ISO 1940-1
More than two rigid discs installed on an elastic shaft whose unbalance is negligible
≥ 0,75 Multiple-speed balancing
ISO 11342 procedure G
Single rigid section installed on an elastic shaft whose unbalance is negligible
All values
Low-speed two-plane balancing
ISO 1940-1
ISO/CD 19499.2:2005
10 ISO 2005 — All rights reserved
Table 2 — Guidelines for balancing procedures
Guidance given in this table should be used with care as the ratio of rotor speed to first flexural resonance in-situ is an approximate value. This will be highly dependent on the dynamics of the bearings and their supports, the vibration quality required and detailed design of the rotor.
. Rotor speed/ first flexural resonant speed in-situ
Balancing process and standard
< 0,75 Low-speed two-plane balancing
ISO 1940-1
Two or more rigid sections installed on an elastic shaft whose unbalance is negligible
≥ 0,75 Multiple-speed balancing
ISO 11342 procedure G
< 0,75 Low-speed two-plane balancing ISO 1940-1
Assumed unbalance distribution according to machining tolerances (generally uniform unbalance distribution) ≥ 0,75 Low-speed two-plane balancing
in two optimum correction planes ISO 11342 procedure F
< 0,75 Low-speed two-plane balancing ISO 1940-1
Cylindrical roll
No known unbalance distribution
≥ 0,75 Multiple-speed balancing ISO 11342 procedure G
< 0,75 Low-speed two-plane balancing ISO 1940-1
Rotor including roll(s) and rigid sections or/and discs
Integral rotors
≥ 0,75 Multiple-speed balancing ISO 11342 procedure G
Any other configuration No factor available ISO 11342
NOTE 1 Factors stated are based on typical balance tolerances with limited initial unbalance.
NOTE 2 Applies to assembled rotors where the individual components have not been balanced prior to assembly.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 11
Although many rotors can be easily identified from the simple guidance given in both Clause 5 and Table 2 others will require a full analysis, particularly when making the distinction between rigid and flexible behaviours. Table 2 requires knowledge of the critical speeds, which are often unknown. Using practical and analytical methods Annexes C and D, respectively, show methods to gain estimates of the rotor’s flexibility in its operating environment.
7.2.2 Select the required balance tolerances for the selected rotor type
Select the balance tolerance as recommended in Clause 6.
When either tight balancing tolerances or low response levels are required it is necessary to consider shaft flexural modes that occur at frequencies above the operating speed range of the rotor. For example, Figure 5, is significantly affected by the higher first flexural mode above the operating speed range up to 50 Hz, even though the first two rigid body modes are at a much lower level. The level of excitation of this higher mode and the balance tolerance required will determine the rotor classification and balancing procedure adopted. In this case the influence of the higher mode will require a flexible rotor balancing procedure to be used to achieve the required balancing tolerance at the operational speed. Here a machine would fail a balance tolerance based on vibration of 5 mm/s rms at a normal operating speed of 50 Hz due to the higher modes, even though the lower modes would be acceptable.
0
5
10
15
20
25
0 10 20 30 40 50 60 70 80
Frequency Hz
Vib
ratio
n le
vel m
m/s
rm
s
Figure 5 — Influence of rotor modes outside the operational speed range.
7.2.3 Select the appropriate balancing procedure
An introduction to the available balancing procedures is presented in Table 2. However, full details for these procedures should be obtained from the appropriate standards.
7.2.4 Choose the appropriate balancing machine
The rotor’s behaviour together with the chosen balancing procedure will dictate if a low- or high-speed balancing machine is required. Further details are highlighted in Table 3 and these are covered in more detail in ISO 2953:
The different types of unbalances call for different types of balancing machines:
Resultant unbalance:
a single-plane balancing machine (low-speed) is sufficient;

ISO/CD 19499.2:2005
12 ISO 2005 — All rights reserved
Resultant moment unbalance:
a two-plane balancing machine (low-speed) is needed;
Modal unbalances:
a high-speed balancing machine will generally be needed.
NOTE 1 On a two-plane machine also single-plane tasks may be performed.
NOTE 2 A high-speed machine can usually handle low-speed tasks (single-plane and two-plane).
NOTE 3 Under certain circumstances even rotors with a flexible behaviour can be balanced at low speed, using special balancing procedures.
Table 3 — Examples of balancing machine requirements
1 Rotor weight 2 Bearing types, size and centre distance 3 Rotor length 4 Rotor diameter 5 Balancing machine sensitivity for the required tolerance 6 Bearing support stiffness to match the installed environment 7 Vacuum facilities for high-speed bladed rotors 8 Allowable maximum speed for bladed rotors on low-speed
machines 9 Induced electrical current for high-speed electrical rotors 10 Arrangements to support shaft overhangs, such as generator
slip rings NOTE This list is not exhaustive and other requirements could be appropriate for specialist machines.
7.2.5 Selecting specialised rotor requirements
While the rotor is in the balancing machine additional tests may be undertaken to ensure the rotor is fit for purpose. Table 4 gives examples of additional tests that could be performed on a large electrical generator rotor while in the balancing machine but similar design and operational requirements should be considered for all rotors that will be specific to their application.
Table 4 — Example of tests that may be undertaken in the balancing machine for an electrical generator rotor
1 Overspeed the rotor to settle the end rings
2 Balance the rotor at operational speed, while passing through the shaft critical speeds and during over speed
3 Undertake thermal stability checks
4 Perform electrical tests to check the integrity of the windings

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 13
8 ISO balancing standards
8.1 General
A suite of ISO International Standards is available to aid the user in the field of balancing, Table 5.
Table 5 — The suite of ISO balancing standards
Topics ISO Standards
Introduction Balancing ISO 19499
Vocabulary Balancing ISO 1925
Vibration and shock ISO 2041
Balancing procedures and tolerances
Rigid behaviour ISO 1940-1
Balance tolerances ISO 1940-2
Balance errors
Flexible behaviour ISO 11342
In-situ balancing ISO 20806
Balancing machines Description and evaluation ISO 2953
Symbols and instrumentation
ISO 3719
Enclosures and safety measures ISO 7475
Machine design for balancing Machine susceptibility and sensitivity
ISO 10814
Shaft and key convention ISO 8821
Machine vibration Measurements on rotating shafts all parts
ISO 7919
Measurements on non-rotating all parts
ISO 10816
These fall into six main areas, introduction (this International Standard), vocabulary, balancing procedures and tolerances, balancing machines, machine design for balancing and machine vibration.
8.2 Vocabulary
8.2.1 ISO 1925 Mechanical vibration — Balancing — Vocabulary
This International Standard establishes a vocabulary on balancing in English and French. An alphabetical index is provided for each of the two languages.
A general vocabulary on vibration and shock is given in ISO 2041.
Annex A gives an illustrated guide to balancing machines terminology and includes equivalent terms in English, French and German.
8.2.2 ISO 2041 Vibration and shock — Vocabulary
This International Standard defines terms, in English and French, relating to vibration and shock. An alphabetical index is provided for each of the two languages.

ISO/CD 19499.2:2005
14 ISO 2005 — All rights reserved
8.3 Balancing procedures and tolerances
8.3.1 ISO 1940-1 Mechanical vibration — Balance quality requirements of rigid rotors in a constant (rigid) state — Part 1: Determination of permissible residual unbalance
This part of ISO 1940 gives recommendations for determining unbalance and for specifying related quality requirements of rigid rotors; it specifies
A representation of unbalance in one and two planes
Methods for determining permissible residual unbalance
Methods for allocating it to correction planes
Methods for identifying the residual unbalance state of a rotor by measurement
A summary of errors associated with the residual unbalance identification.
8.3.2 ISO 1940-2 Mechanical vibration — Balance quality requirements of rigid rotors — Part 2: Balance errors
This part of ISO 1940 covers the following:
The identification of errors in the balancing process of rigid rotors
The assessment of errors
Guidelines for taking errors into account
The evaluation of residual unbalance in any two correction planes.
Many of the errors associated with balancing of rotors with a rigid behaviour as outlined in 1940-2 are equally applicable to rotors being balanced that have a flexible behaviour.
8.3.3 ISO 11342 Mechanical vibration — Methods and criteria for the mechanical balancing of flexible rotors
This International Standard presents typical flexible rotor configurations in accordance with their characteristics and balancing requirements, describes balancing procedures, specifies methods of assessment of the final state of unbalance and gives guidance on balance quality criteria.
This International Standard may also be applicable to serve as a basis for more involved investigations, for example when a more exact determination of the required balance quality is necessary. If due regard is paid to the specified method of manufacture and limits of unbalance, satisfactory running conditions can most probably be expected.
This International Standard is not intended to serve as an acceptance specification for any rotor, but rather to give indications of how to avoid gross deficiencies and/or unnecessarily restrictive requirements.
The subject of structural resonances is covered by ISO 10814 and therefore is outside the scope of this standard.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 15
8.3.4 ISO 20806 Mechanical vibration — Criteria and safeguards for the in-situ balancing of medium and large rotors
This International Standard gives guidance and safeguards that should be adopted when balancing rotors installed in their own bearings on site. It addresses the conditions under which it is appropriate to undertake in-situ balancing, the instrumentation required, the safety implications and the requirements for reporting and maintaining records. The standard may be used as a basis for a contract to undertake in-situ balancing.
This International Standard does not provide guidance on the methods used to calculate the correction masses from measured vibration data
8.4 Balancing machines
8.4.1 ISO 2953 Balance machines — Description and evaluation
This International Standard sets out standards for the evaluation of performance and characteristics of machines for balancing rotating components where correction is required in one or more planes perpendicular to the shaft axis. It stresses the importance attached to the form in which the balancing machine characteristics should be specified by the manufacturer and also outlines methods of evaluating balancing machines
8.4.2 ISO 3719 Mechanical Vibration – Symbols for balancing machines and associated instrumentation
This International Standard establishes symbols for use on balancing machines including instrumentation. They are intended to complement (but not replace) those already standardised in documents such as ISO 7000. The primary purpose of symbols in this International Standard it to explain the functions and uses of the indicators and controls etc. which are an integral part of a balancing machine
8.4.3 ISO 7475 Mechanical vibration — Balancing machines — Enclosures and other protective measures for the measuring station
This International Standard specifies requirements for enclosures and other safety measures used to minimise hazards associated with the operation of balancing machines under a variety of rotor and balancing conditions. It defines different classes of protection that enclosures and other protective features have to provide and describes the limits of applicability for each class of protection
Special enclosure features, such as noise reduction, windage reduction or vacuum (which is required to spin rotors at balancing speed), are not covered by this International Standard.
8.5 Machine design for balancing
8.5.1 ISO 8821 Mechanical vibration — Balancing — Shaft and fitment key convention
This International Standard provides a single convention for balancing the individual components of a keyed assembly. It is intended to provide compatibility of all balanced components, so that when they are assembled they will meet the overall balance or vibration tolerance levels for the assembled rotor.
8.5.2 ISO 10814 Mechanical vibration — Susceptibility and sensitivity of machines to unbalance
This Standard defines methods for determining machine vibration sensitivity to unbalance and provides evaluation guidelines as a function of proximity of relevant resonant speeds to the service speed.
It includes a classification of certain machines in groups associated with the susceptibility to a change of unbalance and/or other machine parameters.

ISO/CD 19499.2:2005
16 ISO 2005 — All rights reserved
The document also makes recommendations on how to apply the numerical sensitivity values in some particular cases.
The recommended values that are shown are intended to be applied only to relatively simple systems and not, for example, to large power generation equipment.
8.6 Machine vibration
8.6.1 ISO 7919 Mechanical vibration — Evaluation of machine vibration by measurements on rotating shafts
The first part sets out general guidelines for measuring and evaluating machinery vibration by means of measurements made directly on the rotating shaft for the purpose of determining shaft vibration with regard to
Changes in vibration behaviour
Excessive kinetic load
The monitoring of radial clearances
The subsequent parts provide specific guidance for assessing the severity of vibration measurement on different classes of plant.
It is applicable to measurements of absolute and relative radial shaft vibration. The procedures are applicable to the operational monitoring of machines and to acceptance testing on the test stand and after installation. Guidelines are also presented for setting operational limits.
8.6.2 ISO 10816 Mechanical vibration — Evaluation of machine vibration by measurements on non-rotating parts
The first part establishes general conditions and procedures for the measurement and evaluation of vibration using measurements made on non-rotating and, where applicable, non reciprocating parts of complete machines. The subsequent parts provide specific guidance for assessing the severity of vibration measurement on different classes of plant.
The general evaluation criteria, which are presented in terms of both vibration magnitude and change of vibration magnitude, related to both operational monitoring and acceptance testing. They have been provided primarily with regard to securing reliable, safe, long term operation of a machine, while minimising adverse effects on associated equipment. Guidelines are also presented for setting operational limits.
The evaluation criteria relate only to the vibration produced by the machine itself and not to vibration transmitted to it from outside.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 17
Annex A (informative)
Calculation of unbalances
A.1 Individual planes
Assuming a rotor with unbalance vectors zUr
1 through 10 (see Figure 1). Looking along the rotor axis, these vectors can be shown in the individual planes as in Figure A.1.
Figure A.1 — Unbalances of a rotor (showing the unbalances in individual planes from Figure 1)
A.2 Resultant unbalance
As an alternative, looking along the rotor axis, these unbalance vectors can be shown with the same origin [see Figure A.2 a)].
The vector sum is rUr
and represents the resultant unbalance, see Figure A.2 b).
r z1
k
zU U
=
=∑r r
where
rUr
is the resultant unbalance vector (in g mm)
zUr
are the individual unbalances vectors

ISO/CD 19499.2:2005
18 ISO 2005 — All rights reserved
A.3 Moment unbalance
Assuming a plane for the resultant unbalance (e.g. the centre plane), one can calculate the moment unbalance P
r (product of inertia) by the following vector product:
( ) zUz Uzzrrr
×− r
where
Pr
is the moment unbalance (in g mm2)
Ur
z is the individual unbalance vector
zzr is the distance from a datum mark to the plane of zU
r
rUzr is the distance from a datum mark to the plane of the resultant unbalance rU
r
A.4 Resultant moment unbalance
The moment unbalances of all individual unbalance vectors zUr
together result in the resultant moment
unbalance rPv
:
( ) z
k
zUz UzzP
rrrv×−= ∑
=1r r
A.5 Couple unbalance
If a moment unbalance is referred to a plane distance b, the couple unbalance Cr
is gained, since the vectors
br
and Cr
are orthogonal:
PC
b=
rr
r
where
Cr
is a couple unbalance vector (in g mm)
Pr
is the moment unbalance (in g mm2)
b is the plane distance (in mm)
NOTE The couple unbalance consists of a pair of unbalance vectors Cr
and Cr
− with equal length Cr
, opposite
directions and distance b .

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 19
If, for example, b equals the distance of both end planes, the couple unbalance vectors in the left hand end plane is shown in Figure A.2 c). The vector sum of all these unbalances equals the resulting couple unbalance [see Figure A.2 d)] in the left hand end plane (right hand end plane same magnitude but opposite).
a) unbalance vectors 1 to 10
b) resultant unbalance rUr
c) couple unbalances in left hand end plane, assuming Ur is in the centre plane and moment unbalances are related to both end planes
d) resulting couple unbalance Cr
r in left hand end plane (right hand end plane same magnitude but opposite)
Figure A.2 — Unbalances in a rotor with rigid behaviour
A.6 Modal unbalances
Modal unbalances based on bending lines (mode functions =nzn ),(φ 1, 2, 3, …) of the individual modes. Figure A.3 shows (idealised) modal deflection shapes for the first 3 modes of the rotor in Figure 1 (strictly the rotor in Figure 1 will not have mode functions which are symmetrical about mid-span).

ISO/CD 19499.2:2005
20 ISO 2005 — All rights reserved
a) first mode )(1 zφ , b) second mode )(2 zφ , c) third mode )(3 zφ
Figure A.3 — Idealized bending lines of a rotor
The modal unbalance in its simplified form is:
n z z1
k
zU U ϕ
=
=∑r r
NOTE The nth modal unbalance is not a single unbalance but an unbalance distribution in the nth mode.
As an example for the first mode Figure A.4 a) shows the ordinate values for the different planes. Figure A.4 b) shows the unbalance vectors 1 to 10, Figure A.4 c) depicts the vectors Uzφz for the first mode.
A.7 Equivalent modal unbalance
The modal unbalance Un is the vector sum of all these products. Divided by the maximum ordinate value of the bending line the equivalent modal unbalance Une is gained (in the plane of the maximum ordinate value, see Figure A.4 d).
φ
φ
max
k
1=z
U = U
zz
ne
r
r∑
NOTE This is an unbalance vector with the dimension g mm, identical in its effect on the flexure ot the rotor in this mode as all the individual unbalances together, if it is acting at the axial position of maxφ .

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 21
a) first mode with ordinate values
b) unbalances in 10 planes
c) unbalances weighted with the ratio of the ordinates in these planes and the maximum absolute ordinate value
d) vector sum, equals the equivalent modal unbalance Une
Figure A.4 — Equivalent modal unbalance of a rotor

ISO/CD 19499.2:2005
22 ISO 2005 — All rights reserved
Annex B (informative)
Examples of different rotor behaviours
B.1 General
The different rotor behaviour cause different unbalance readings, if speed is changed. Observing the reading and the rotor response to test unbalances may give hints on the particular behaviour of a rotor.
In order to show this as clearly as possible, it is assumed that:
the balancing machine is rigid enough not to influence the reading by the dynamic of the pedestals,
the reading is calibrated over the speed range in unbalances1).
The rotor is run between a low speed n1 (a typical balancing speed on a hard-bearing balancing machine) and the operational speed n2.
Two different representations of the readings are used: on the left the unbalance amount over the speed, on the right amount and phase in a polar display.
B.2 Rigid behaviour
The reading is stable over the speed range, Figure B.1. Near to tolerance, at least after balancing, the reading may show a slight change with speed, but this is negligible compared to the tolerance.
IUI
n2n1
tol.
unbalanced
balanced
Figure B.1 — Rigid behaviour with negligible change in readings over the speed range
B.3 Flexible behaviour
The reading is changing with speed. But in this special case, it is not a change in unbalance, but the rotor undergoes a bending deflection due to a modal unbalance (see footnote to Clause B.1).
1) In case of flexible behaviour the reading changes. But this is not a change of unbalance: It is based on a bending resonance of the rotor, whereas the modal unbalance, which causes the bending, does not change.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 23
The change in reading is reversible, i.e. increasing the speed and reducing the speed the reading will follow the same curve.
If the operational speed is below the 1st bending resonance, the reading will be according to Figure B.2.
If the operational speed is above the 1st bending resonance, the reading will be according to Figure B.3.
Using a balancing procedure, addressing the flexible behaviour properly, the readings and the change in readings will become smaller, thus within the speed range all readings will be in tolerance.
IUI
n2n1
tol.
unbalanced
balanced
Figure B.2 — Flexible behaviour: the operational speed is below the 1st bending resonance
IUI
n2n1
tol.
unbalanced
balanced
Figure B.3 — Flexible behaviour: the operational speed is above the 1st bending resonance
B.4 Component elastic behaviour
The reading is changing with speed. And here, it is a change in unbalance, Figure B.4.
The change in reading is reversible, i.e. increasing the speed and reducing the speed gives the same curve.
If the component-elastic behaviour cannot be reduced by a modified manufacturing or assembly process, balancing is only a compromise, because balancing does not influence the change in readings (and unbalance), but the reading can be shifted to another place. As a result, not all readings will be in tolerance.
Typically a rotor with component-elastic behaviour is balanced to be in tolerance at higher speeds, with a risk to be out of tolerance at lower speeds.

ISO/CD 19499.2:2005
24 ISO 2005 — All rights reserved
IUI
n2n1
tol.
unbalanced
balanced
Figure B.4 — Component-elastic behaviour: typically such a rotor is balanced to be in tolerance at higher speeds, with a risk to be out of tolerance at lower speeds
B.5 Seating behaviour
The reading is changing with speed, sometimes suddenly at a certain speed level. Also here, it is a change in unbalance, Figure B.5.
IUI
n2n1
1 runst
2 runnd
balanced
tol.
Figure B.5 — Seating behaviour: The rotor settles with the first run. The second run shows a rigid behaviour, but seating behaviour can superimpose any other behaviour
But the change in reading is not reversible, i.e. increasing the speed and reducing the speed does not give the same curve.
Typically the rotor settles once for all with the first run, so that the seating behaviour will not occur again with the second run and all following runs.
In this case the settled rotor shows a rigid behaviour, but seating behaviour can superimpose any other behaviour.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 25
Annex C (informative)
Procedure to determine if a rotor is rigid or flexible
C.1 General
This annex is identical to ISO 11342:1998, Annex E, and describes procedures that may be used to determine whether a rotor is rigid or flexible. If it is determined that a rotor falls into the rigid category, then it can be balanced using a low-speed balancing procedure. In general, flexible rotors need to be balanced at high speeds using procedures such as those in ISO 11342:1998, Clause 7. There are, however, rotors which, by definition, are flexible but are borderline, and for which low-speed balancing may be adequate using the special procedures given in ISO 11342:1998, Clause 6.
The physical appearance of a rotor is insufficient to determine whether a rotor falls into the rigid or flexible categories for balancing purposes. If a rotor operates at high speeds, it may approach or pass through a critical speed involving significant bending of the rotor and therefore requires high-speed balancing. A rotor is considered rigid for balancing purposes if its highest service speed is at least 30 % below the first flexural critical speed.
C.2 Determination of whether a rotor is rigid or flexible
One or more of the following may be used to ascertain whether a rotor is rigid or flexible, and thereby determine the balancing method to be adopted.
C.2.1 Consult the rotor manufacturer or the user for a definition of the rotor configuration and characteristic and a recommended balancing procedure (see ISO 11342:1998, Clause 5).
C.2.2 If the first flexural critical speed exceeds the maximum service speed by at least 50 %, then the rotor can often be considered rigid for balancing purposes.
C.2.3 Alternatively the following test sequence may be performed.
Balance the rotor at low speed in two correction planes in accordanced with the procedures specified in ISO 1940-1.
Mount the rotor in a facility that is capable of rotating the rotor to at least service speed and that has stiffness and damping of the bearings and their supports similar to the service installation. Accelerate the rotor gradually to service speed, taking care that vibration at all times stays within safe limits. Record vibration readings as a function of speed during the acceleration and subsequent deceleration.
If no significant change in vibration occurs as a function of speed, then the rotor is either rigid, or is flexible with low levels of modal unbalance. To determine which of these possibilities apply, perform the flexibility test defined in Clause C.3.
If a significant change in vibration occurs during acceleration or deceleration, one or more of the following possibilities exist:
a) the rotor is flexible;
b) the rotor is rigid but flexibly supported;
c) the rotor has components that shift location significantly as a function of speed or temperature.

ISO/CD 19499.2:2005
26 ISO 2005 — All rights reserved
To help discriminate between these possibilities, accelerate the rotor again to service speed and then check if the readings during deceleration to zero speed repeat those of the prior deceleration run. If they do the rotor has settled. Next perform the flexibility test given in Clause C.3 to determine if the rotor is rigid or flexible.
NOTE Settlement may have occured by taking the rotor to its service speed or beyond by permanently seating components due to centrifugal force. For example, generator and motor rotors fequently require a settlement run to enable the copper windings and support systems to move radially outward to their final position.
If the readings do not repeat, the rotor's unbalance is variable and the rotor cannot generally be balanced within tolerance until this problem is corrected.
C.3 Rotor flexibility test
Add a mass to the centre of the rotor, or to an available position where it may be expected to cause high rotor vibration. Accelerate the rotor to service speed, taking care that vibration at all times stays within safe limits. If the vibration magnitude becomes excessive during the acceleration, reduce the magnitude of the mass and repeat the process. Measure the vibration vector at service speed and at the same location as in C.2.3. Determine the effect of the mass on the vibration level by vectorially subtracting the vibration vector recorded in C.2.3 from the new reading. Denote the result by vector A
r.
Stop the rotor and remove the mass. Install two masses at the same angular position as the central mass that was removed. These masses should be placed close to the rotor end planes. The masses should be chosen to provide the same quasi-static unbalance in the plane of the single test mass without introducing any additional couple unbalance. Accelerate the rotor to service speed again, take another reading and determine the effect of the two masses on the rotor by subtracting the vector from C.2.3 from the reading. Denote this vector by B
r.
C.4 Evaluation of flexibility test data
Compute the magnitude of the vector ( )BArr
− . If this magnitude when divided by the magnitude of vector Ar
is less than 0,2, the rotor can usually be considered rigid for balancing purposes. Conversely, if this ratio is 0,2 or greater then the rotor should be treated as a flexible rotor.
If sufficient rotor system modelling data are available, it is possible to generate analytically the data needed for calculating the ratio in Clause C.4, thereby avoiding the need to perform the flexibily test. Particular care must be taken with this approach to model accurately the stiffness and damping characteristics of the rotor/support system.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 27
Annex D (informative)
How to determine the rotors flexibility, based on an estimation from its
geometric design
D.1 General
The path taken to balance the rotor depends on the rotor’s flexibility when running in its service environment. This Annex provides a method to make judgements as to the flexibility of the rotor in its operating environment from the rotor’s geometric design and an approximate knowledge of the rotor’s supporting structure.
If the full details of the rotors design plus the dynamic characteristics of the bearings and their support structures are defined the mathematical simulation will give an exact estimate of the rotors behaviour. This will enable the correct assessment of the rotor’s behaviour.
D.2 Mathematically modelling the rotor
The rotor can be easily mathematically modelled from its geometric design to estimate its natural frequencies. Basic parameters such as the bearing centre distance, total rotor mass, the external diameters carrying the stiffness and mass distribution should be approximately correct. To gain further confidence simulating the first free-free flexural mode of the rotor and comparing this with experimental data can check the rotor model. A good approximation for a free-free mode is to support the rotor from a crane and excite it in the horizontal direction.
D.3 Procedure
Calculate the first pinned-pinned natural frequency of the rotor by using the mathematical representation developed above and support it at the bearings with infinite radial stiffness. Simply estimate the rotor’s stiffness according to the following equation:
Rotor stiffness = Mass of rotor × (First pinned-pinned natural frequency)2
Recalculate the first, second and third natural frequencies over a range of support stiffness. Normalising the support stiffness relative to that calculated for the rotor and normalise the natural frequencies relative to normal or maximum operating speed, and generate a graph as shown in the examples, see Figure D.1.
The first, second and third natural frequencies are represented by the solid, dotted and dashed lines respectively. Due to the normal stiffness asymmetry of a supporting oil film and bearing structures these natural frequencies would be usually seen in pairs but to simplify the analysis here the supports are assumed to be symmetric. With low support stiffness the two lower modes are the rigid body modes and the third is the first flexural mode. Rotors on stiff supports will only see the flexural modes. If an approximate value for oil film stiffness is available this can be added to the diagram, since this will represent the maximum support stiffness available. On many machines the shaft critical peaks seen in the run up and rundown can be related to those shown on the figure, and will provide an approximate indication of the support stiffness.

ISO/CD 19499.2:2005
28 ISO 2005 — All rights reserved
D.4 Selection for rotors in an rigid or flexible behaviour
The data shown in Figure D.1 clearly indicates this rotor to be operating with a flexible behaviour. For machines with high support stiffness the first natural frequency is well within the operating speed range and on low support stiffness the first flexural mode could become important.
0
1
2
3
4
0.01 0.10 1.00 10.00 100.00X
Y
(g)
(c)
(a)(b) (d)
(e)
(f)
(h)
Key
X Support stiffness/rotor stiffness
Y Frequency/running speed
a 1st rigid body mode
b 2nd rigid body mode
c 1st flexural mode
d 1st flexural mode
e 2nd flexural mode
f 3rd flexural mode
g Estimated stiffness of the bearing oil films
h Range 0 to 1 for normal operating speed
Figure D.1 — Frequency map of a rotor with flexible behaviour
Figure D.2 is an example where the rotor is operating with rigid behaviour. At high and low support stiffness the first flexural natural frequency is above the operating speed range. There may be a stiffness range where the supports have a value just below that of that the rotor, where the rotor could be influenced by its flexible state. For the example given this is unlikely, since the stiffness would be above that of the oil film. Practically, the rotor is much stiffer than its supports and will operate as a rigid rotor with minimal bending.

ISO/CD 19499.2:2005
ISO 2005 — All rights reserved 29
0
1
2
3
4
5
0.01 0.10 1.00 10.00 100.00X
Y
(g)
(c)
(a)
(b)
(d)
(e)
(f)
(h)
Key
X Support stiffness/rotor stiffness
Y Frequency/running speed
a 1st rigid body mode
b 2nd rigid body mode
c 1st flexural mode
d 1st flexural mode
e 2nd flexural mode
f 3rd flexural mode
g Estimated stiffness of the bearing oil films
h Range 0 to 1 for normal operating speed
Figure D.2 — Frequency map of a rotor with rigid behaviour
D.5 Special circumstances
The method shown considers the normal situation for large rotor systems, where the rotors are supported on stiffness controlled support structures. There may be situations where supports are mass controlled or even operating at a resonance and the above method could give misleading results. However, when the method is applied to large land based gas turbines, where the bearing supports structures carry the mass of the casings, the method correctly indicates that most of these rotors operate with a flexible behaviour at normal operating speed.

ISO/CD 19499.2:2005
30 ISO 2005 — All rights reserved
Bibliography
[1] ISO 7000, Graphical symbols for use on equipment — Index and synopsis