non-linear optimization schemefor non-orthogonal multiuser access
TRANSCRIPT
Vladimir Lyashev, Mikhail Maksimov, Nikolai Merezhin
The Institute of Signal Processing and Control Systems
Southern Federal University Rostov-on-Don – Taganrog, Russia
Non-Linear Optimization Scheme
for Non-Orthogonal Multiuser Access
TELFOR – 2014 November 25-27, 2014

Page 2 The Institute of Signal Processing and Control Systems
Southern Federal University
Problem Definition
1
2
1
2
The reasons to lost orthogonality
Birth & Death
Channel Spread
Low periodicity of Time Align
command – sync. problem
Future high capacity
communication systems
will require non-
orthogonal multiuser
access (METIS-2020)
Today communication systems are
based on orthogonal properties for
V-MIMO and WCDMA users.

Page 3 The Institute of Signal Processing and Control Systems
Southern Federal University
Intra-cell Interference
Nuser = 6, td = 0 us Nuser = 6, td = 1.56 us
Desired
user Interference ξ Desired
user Interference ξ
23.7 0.11 -46 dB 14.41 4.12 -11 dB
12.52 0.67 -25 dB 11.23 2.63 -13 dB
13.37 0.95 -23 dB 16.91 1.01 -24 dB
9.83 0.65 -24 dB 2.42 3.15 2 dB
7.5 0.26 -29 dB 7.97 2.71 -9 dB
10.6 0.51 -26 dB 5.11 4.21 -1.7 dB
ETU channel (td=0us)
System model
This is equal
power!

Page 4 The Institute of Signal Processing and Control Systems
Southern Federal University
Mathematical Model and Its Approximation
),,(),(),,(),(),,,(),,(1
),,(ˆ
klnElqXlkqPkqTlknqHklnYQ
qlknTq
B-rank channel approximation:
B
kSnqWlknqH1
),(),,(),,,(
Rank-2 model basically gives a very good fit to the
experimental channel H(q, n, l, k), usually of a fit of order 95%.
The rank-1 model also look promising, and can approximate
70% of the energy.

Page 5 The Institute of Signal Processing and Control Systems
Southern Federal University
Non-linear Optimization Problem Formulation
Φ 𝐗 = 𝐘 − 𝐓 𝑞𝐏𝑞𝑋𝑞
𝑄
𝑞=1
2
→ min
Φ 𝐗 : F 𝐓 , 𝐗, 𝐏 = 𝐘 − 𝐘 𝐓 , 𝐗, 𝐏2+ 𝜆1 𝐓
2+ 𝜆2 𝐗 2 + 𝜆3 𝐏 2
F 𝐓 + 𝛿𝐓 , 𝐗 + 𝛿𝐗, 𝐏 + 𝛿𝐏 = 𝐘 − 𝐘 , 𝛿𝐘
Assumption
Regulized minimization functional

Page 6 The Institute of Signal Processing and Control Systems
Southern Federal University
Tikhonov Regularization in Inverse Problem
22εbAx
Each least squares problem has to be regularized. In the linear case,
we want to solve minimization problem
after regularization
the solution is
εbAx
bAIAA
bAΓΓAAx
HH
HHH
1
1
min22 ΓxbAx
5x

Page 7 The Institute of Signal Processing and Control Systems
Southern Federal University
Optimization Methods
Gauss-Newton method
Φ 𝑥 = Φ 𝑥𝑖 +Φ′ 𝑥𝑖 𝛿𝑥
Trust-Region method
𝛿𝑥 = T(𝑥𝑖+1 − 𝑥𝑖)
Levenberg-Marquardt approach
(damped least-squares)
𝛿𝑥 = − 𝐉𝐻𝐉 + 𝜇𝐈 −1𝐉𝐻𝐅
Φ 𝐗 = 𝐘− 𝐓 𝑞𝐏𝑞𝑋𝑞
𝑄
𝑞=1
2
→ min
D. Nion and L. De Lathauwer. Levenberg-Marquardt computation of the block factor model for blind multi-user access in
wireless communications.In European Signal Processing Conference (EUSIPCO), Florence, Italy, September 4-8 2006.
Page 8 The Institute of Signal Processing and Control Systems
Southern Federal University
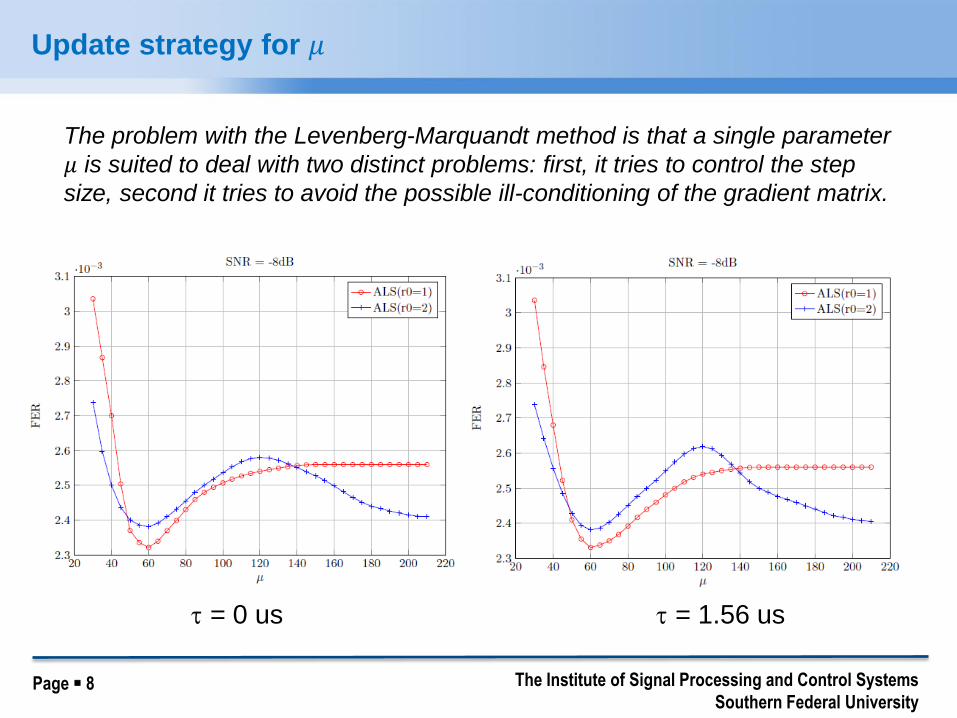
Update strategy for 𝜇
t = 1.56 us t = 0 us
The problem with the Levenberg-Marquandt method is that a single parameter
𝜇 is suited to deal with two distinct problems: first, it tries to control the step
size, second it tries to avoid the possible ill-conditioning of the gradient matrix.

Page 9 The Institute of Signal Processing and Control Systems
Southern Federal University
Convergence
0 10 20 30 40 50-8
-7.9
-7.8
-7.7
-7.6
-7.5
-7.4
-7.3
-7.2
-7.1
-7
Iteration #
EsN
0,
dB
[Convergence] EsN0 for FER=10-2
the method of gradient descent
Gauss-Newton
Gauss-Newton (𝜇 = 0)
Gradient descent (𝜇 → 𝑖𝑛𝑓)
Fix 𝜇 = 60
Adaptive 𝜇
If Λ > 0.0,
𝑠𝑒𝑡 𝜇 <= 𝜇max1
3, 1 − 2Λ − 1 3 ;
Otherwise,
𝜇 <= 2𝜇.
Λ𝑖 = Λ𝑖−1 + 2𝜇 𝐻 − 𝐻 𝑅
20 iters.

Page 10 The Institute of Signal Processing and Control Systems
Southern Federal University
Simulation Results
-16 -14 -12 -10 -8 -6 -410
-4
10-3
10-2
10-1
100
SNR, dB
BLE
R
MRC w/o interference
MRC
ALS
ALS with regularization
ALS Newton
SINR before -4.77 dB -10.4 dB
SINR after

Page 11 The Institute of Signal Processing and Control Systems
Southern Federal University
Outlook
Pilot contamination problem in massive MIMO
Fast & distributed coherent signal processing
Joint multiuser detection
Joint sector/cell
Adaptive coupling scheme for relaxation
based signal processing
MU-pairing for distributed MIMO System
Complexity Reduction of Proposed Method
Conjugate gradients: CG or BiCG
Decomposition methods: waveform relaxation

Page 12 The Institute of Signal Processing and Control Systems
Southern Federal University
THE END Any questions ?
Vladimir Lyashev, PhD