nm caribou et nm joseph & clara smallwood · 2015-07-27 · révision 0 15 décembre 2004...
TRANSCRIPT

Révision 0 15 décembre 2004
Études des travaux de carénage de Marine Atlantic
NM CARIBOU et NM JOSEPH & CLARA SMALLWOOD
Systèmes de commande et de surveillance des
machines
10264 – 800–2

Études des travaux de carénage de Marine Atlantic
NM Caribou et NM Joseph & Clara Smallwood
Table des matières
INTRODUCTION ................................................................................................................................................
CONTEXTE : ..................................................................................................................................................
BUT : ...............................................................................................................................................................
PORTÉE : .......................................................................................................................................................
DOCUMENTS PERTINENTS .............................................................................................................................
APERÇU DU DOCUMENT .................................................................................................................................
CONCLUSIONS ET RECOMMANDATIONS .....................................................................................................
SYSTÈME DE SURVEILLANCE ET D’ALARME ..............................................................................................
SYSTÈME DE COMMANDE À DISTANCE DU MOTEUR PRINCIPAL ET DU CPP ......................................
SYSTÈME RÉGULATEUR DE VITESSE ÉLECTRONIQUE ............................................................................
SYSTÈME DE SURVEILLANCE CCTV DANS LA SALLE DES MACHINES ..................................................
Figure 1 : SCHÉMA DE PRINCIPE DU SYSTÈME ALSY-8 ET D’INFORMATION DU NM SMALLWOOD ..................................................................................................................................
Figure 2 : SCHÉMA DE PRINCIPE DU SYSTÈME ALSY-8 ET DE JAUGEAGE RÉSERVOIR DU NM CARIBOU ....................................................................................................................................
Figure 3 : DÉPOSE DU SYSTÈME ALSY-8 SUR LE NM SMALLWOOD .......................................................
Figure 4 : PROPOSITION D’ABB RELATIVE AU NM SMALLWOOD ............................................................
Figure 5 : PROPOSITION D’ABB RELATIVE AU NM CARIBOU ...................................................................
Figure 6 : PROPOSITION DE KONGSBERG RELATIVE AU NM SMALLWOOD ..........................................
Figure 7 : PROPOSITION DE KONGSBERG RELATIVE AU NM CARIBOU .................................................
Figure 8 : SCHÉMA DE PRINCIPE DU SYSTÈME DE SURVEILLANCE CCTV ............................................
Annexes
ANNEXE A – PROPOSITION D’ABB MARINE HOLLAND
ANNEXE B – PROPOSITION DE KONGSBERG MARITIME AS
ANNEXE C – PROPOSITION RELATIVE AU SYSTÈME DE SURVEILLANCE CCTV
2
Études des travaux de carénage de Marine Atlantic
NM Caribou et NM Joseph & Clara Smallwood
INTRODUCTION
CONTEXTE
Le présent rapport a été préparé conformément à la Section 3 de l’énoncé des travaux de Fleetway Consolidated pour les Études des travaux de carénage de Marine Atlantic.
BUT
Le présent rapport vise à détailler les résultats des études sur les systèmes de commande et de surveillance des machines qui ont été effectuées dans le cadre de l’Évaluation technique de l’état et du prolongement de durée des navires NM Caribou et NM Joseph & Clara Smallwood.
PORTÉE
Le présent rapport porte sur les lacunes des systèmes actuels et formule des recommandations sur ces systèmes ou sur de nouveaux systèmes afin de prolonger la durée de vie en service de ces deux navires pour une période supplémentaire comprise entre 15 et 20 ans.
DOCUMENTS PERTINENTS
Les documents suivant s’appliquent au présent rapport dans la mesure indiquée aux présentes :
Plans :
a) Main Automation System External Connection Drawings, ASEA Réf. : 6261.2038 b) Manual of KaMeWa Controllable Pitch Propeller System c) ALSY-8 Manual, YL 643-301E d) FAMP-S Manual e) DEGO II système régulateur de vitesse électronique f) GENA-S Power Plant Control System
Publications :
a) Lloyd’s Register – Rules and Regulations for the Classification of Ships, Part 1 – Regulations b) Lloyd’s Register – Rules and Regulations for the Classification of Ships, Part 6 – Control, Electrical,
Refrigeration and Fire
APERÇU DU DOCUMENT
Le reste du présent rapport comprend les sections suivantes :
Conclusions et recommandations – cette section expose les lacunes des systèmes de commande et de surveillance des machines actuels des navires et recommande les mesures de modernisation possibles.
Système de surveillance et d’alarme – cette section expose les lacunes du système de surveillance et d’alarme ALSY-8 actuel ainsi que les propositions visant à le remplacer. Afin de doter ces navires de fonctions supplémentaires, on présente également deux solutions plus efficaces sur le plan économique et deux éléments à prendre en considération à propos des systèmes de notation CCS et UMS haut de gamme liés à l’automatisation et à la commande des machines.
Système de commande à distance de moteur principal et de CPP – cette section expose l’état actuel du système de commande à distance de moteur principal et de CPP FAMP-S actuel, le service de soutien offert par le fabricant et les recommandations relatives aux travaux de carénage de mi-durée.

3
Marine Atlantic Refit Studies
MV “Caribou” & MV “Joseph & Clara Smallwood”
Système régulateur de vitesse électronique – cette section expose l’état actuel des systèmes régulateur de vitesse électronique DEGO-S et DEGO-II, le service de soutien offert par le fabricant et les recommandations relatives aux travaux de carénage de mi-durée.
Système de surveillance CCTV dans la salle des machines – cette section présente une proposition relative à l’installation d’un nouveau système de surveillance CCTV dans la salle des machines.
Les annexes suivantes contiennent des renseignements supplémentaires à l’appui du rapport :
Annexe A – Proposition d’ABB Marine Holland relative au remplacement du système de surveillance et d’alarme des machines, du système de commande à distance de moteur principal et de CPP, ainsi que du système régulateur de vitesse électronique.
Annexe B – Proposition de KONGSBERG Maritime AS relative au remplacement du système de surveillance et d’alarme des machines.
Annexe C – Proposition de KONGSBERG Maritime AS relative à l’installation du système de surveillance CCTV dans la salle des machines.
CONCLUSIONS ET RECOMMANDATIONS
APERÇU DES SYSTÈMES DE COMMANDE ET DE SURVEILLANCE DES MACHINES
Les systèmes de commande et de surveillance des machines sur les NM Caribou et Smallwood ont été fournis par ASEA, et comprennent les trois sous-systèmes suivants :
Description NM Caribou NM Smallwood
1 Système de surveillance et d’alarme ALSY-8 ALSY-8 et système d’information ABB
2 Système de commande à distance de moteur principal et de CPP
FAMP-S FAMP-S
3 Système régulateur de vitesse électronique DEGO-S DEGO-II
Ces trois systèmes ont été installés au moment de la construction des navires et de leur livraison par le chantier naval Davie. Voici les conclusions et les recommandations suggérées en fonction des études qui ont été faites sur ces navires :
1. Système de surveillance et d’alarme ALSY-8
Le système de surveillance et d’alarme ALSY-8, monté sur les NM Caribou et Smallwood, présente les lacunes suivantes :
On a cessé la production du système ALSY-8 depuis quelques années et il n’y a donc plus de pièces de rechange neuves. Certaines pièces de rechange remises à neuf sont dispendieuses, car les vieilles cartes de circuits imprimés doivent être nettoyées et testées. La firme ABB Marine Holland tente d’offrir un service de soutien pour ce système, mais elle n’est plus en mesure d’offrir à ses techniciens une formation sur ce système.
L’imprimante d’alarmes et de données montée à l’intérieur de la console de surveillance des machines (ECC) ne fonctionne plus depuis quelques années et on a fini par la désactiver. Il n’y a plus d’enregistrement des alarmes depuis longtemps.
Certains signaux d’alarme ont été reliés à l’ALSY-8, mais ces signaux ne peuvent parvenir au moniteur de l’ECC ni au moniteur du bureau du mécanicien en chef, car le logiciel n’a pas été mis à jour.
La lecture du signal analogique n’est plus fiable à cause de la détérioration des cartes de circuits imprimés.
Le système ne dispose plus d’aucune voie libre pour connecter et surveiller d’importants signaux.
Par conséquent, il ne fait aucun doute que le système de surveillance et d’alarme ALSY-8 des NM Caribou et Smallwood doit être remplacé.
4
Marine Atlantic Refit Studies
MV “Caribou” & MV “Joseph & Clara Smallwood”
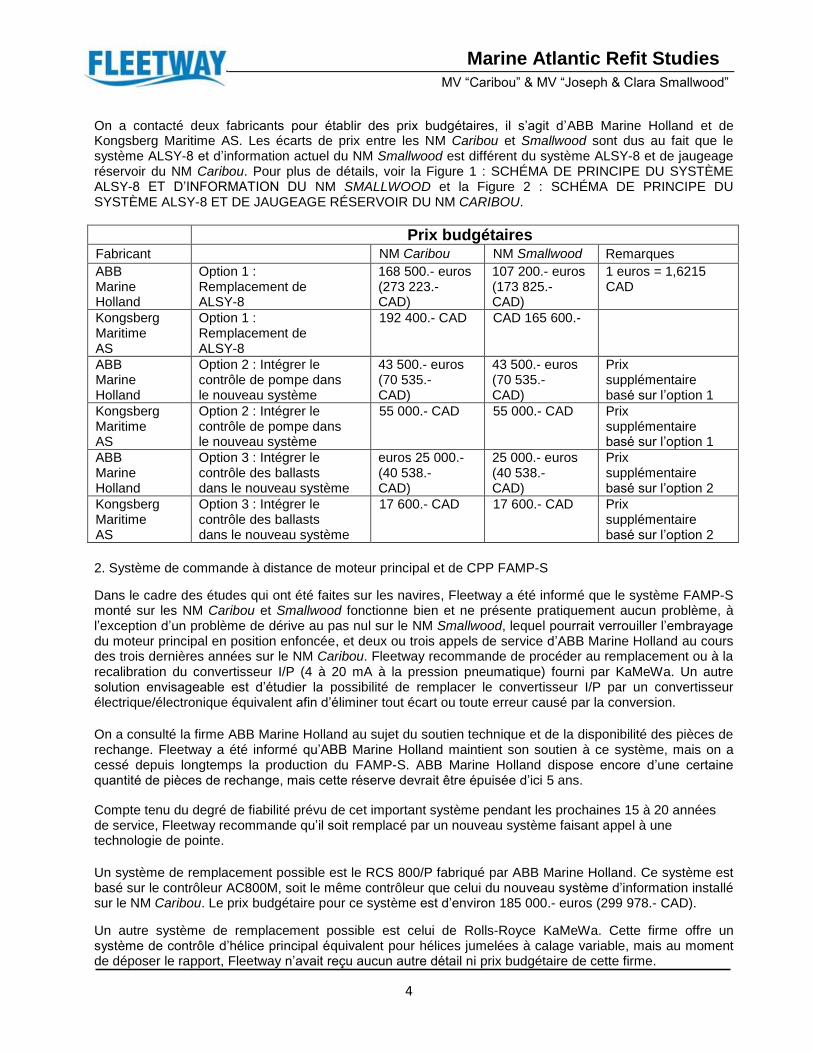
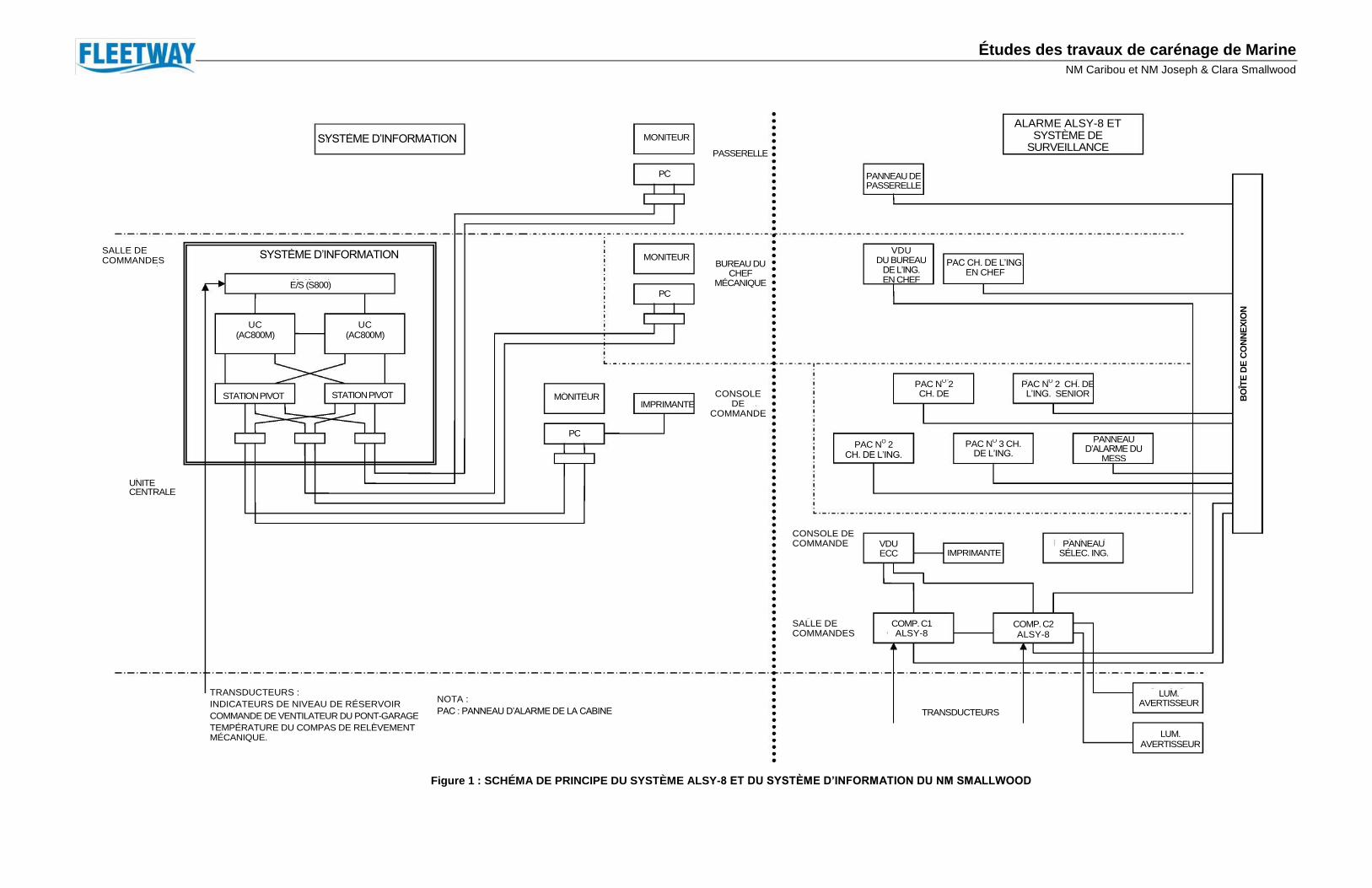
On a contacté deux fabricants pour établir des prix budgétaires, il s’agit d’ABB Marine Holland et de Kongsberg Maritime AS. Les écarts de prix entre les NM Caribou et Smallwood sont dus au fait que le système ALSY-8 et d’information actuel du NM Smallwood est différent du système ALSY-8 et de jaugeage réservoir du NM Caribou. Pour plus de détails, voir la Figure 1 : SCHÉMA DE PRINCIPE DU SYSTÈME ALSY-8 ET D’INFORMATION DU NM SMALLWOOD et la Figure 2 : SCHÉMA DE PRINCIPE DU SYSTÈME ALSY-8 ET DE JAUGEAGE RÉSERVOIR DU NM CARIBOU.
Prix budgétaires Fabricant NM Caribou NM Smallwood Remarques
ABB Marine Holland
Option 1 : Remplacement de ALSY-8
168 500.- euros (273 223.- CAD)
107 200.- euros (173 825.- CAD)
1 euros = 1,6215 CAD
Kongsberg Maritime AS
Option 1 : Remplacement de ALSY-8
192 400.- CAD CAD 165 600.-
ABB Marine Holland
Option 2 : Intégrer le contrôle de pompe dans le nouveau système
43 500.- euros (70 535.- CAD)
43 500.- euros (70 535.- CAD)
Prix supplémentaire basé sur l’option 1
Kongsberg Maritime AS
Option 2 : Intégrer le contrôle de pompe dans le nouveau système
55 000.- CAD 55 000.- CAD Prix supplémentaire basé sur l’option 1
ABB Marine Holland
Option 3 : Intégrer le contrôle des ballasts dans le nouveau système
euros 25 000.- (40 538.- CAD)
25 000.- euros (40 538.- CAD)
Prix supplémentaire basé sur l’option 2
Kongsberg Maritime AS
Option 3 : Intégrer le contrôle des ballasts dans le nouveau système
17 600.- CAD 17 600.- CAD Prix supplémentaire basé sur l’option 2
2. Système de commande à distance de moteur principal et de CPP FAMP-S
Dans le cadre des études qui ont été faites sur les navires, Fleetway a été informé que le système FAMP-S monté sur les NM Caribou et Smallwood fonctionne bien et ne présente pratiquement aucun problème, à l’exception d’un problème de dérive au pas nul sur le NM Smallwood, lequel pourrait verrouiller l’embrayage du moteur principal en position enfoncée, et deux ou trois appels de service d’ABB Marine Holland au cours des trois dernières années sur le NM Caribou. Fleetway recommande de procéder au remplacement ou à la recalibration du convertisseur I/P (4 à 20 mA à la pression pneumatique) fourni par KaMeWa. Un autre solution envisageable est d’étudier la possibilité de remplacer le convertisseur I/P par un convertisseur électrique/électronique équivalent afin d’éliminer tout écart ou toute erreur causé par la conversion.
On a consulté la firme ABB Marine Holland au sujet du soutien technique et de la disponibilité des pièces de rechange. Fleetway a été informé qu’ABB Marine Holland maintient son soutien à ce système, mais on a cessé depuis longtemps la production du FAMP-S. ABB Marine Holland dispose encore d’une certaine quantité de pièces de rechange, mais cette réserve devrait être épuisée d’ici 5 ans.
Compte tenu du degré de fiabilité prévu de cet important système pendant les prochaines 15 à 20 années de service, Fleetway recommande qu’il soit remplacé par un nouveau système faisant appel à une technologie de pointe.
Un système de remplacement possible est le RCS 800/P fabriqué par ABB Marine Holland. Ce système est basé sur le contrôleur AC800M, soit le même contrôleur que celui du nouveau système d’information installé sur le NM Caribou. Le prix budgétaire pour ce système est d’environ 185 000.- euros (299 978.- CAD).
Un autre système de remplacement possible est celui de Rolls-Royce KaMeWa. Cette firme offre un système de contrôle d’hélice principal équivalent pour hélices jumelées à calage variable, mais au moment de déposer le rapport, Fleetway n’avait reçu aucun autre détail ni prix budgétaire de cette firme.
5
Marine Atlantic Refit Studies
MV “Caribou” & MV “Joseph & Clara Smallwood”
3. Système régulateur de vitesse électronique
Le système régulateur de vitesse électronique actuel est de type DEGO-S sur le NM Caribou, et de type DEGO-II sur le NM Smallwood, ce dernier étant d’une génération plus récente que le DEGO-S.
Pour le NM Caribou
On a cessé la production du système DEGO-S depuis longtemps. Toutefois, des pièces de rechange neuves et remises à neuf sont encore disponibles et ABB Marine Holland peut encore en assurer le service.
Dans le cadre de l’étude sur le navire, Fleetway a été informé que 4 régulateurs électroniques DEGO-S devraient être remplacés en raison des nombreux problèmes qu’ils ont causés ces derniers mois, notamment :
Ils ont causé des problèmes au niveau de la répartition des charges entre les moteurs.
Dérive des données. Détérioration des borniers. Graves problèmes de maintien des réglages.
Pour le NM Smallwood
La firme ABB Marine Holland soutien encore le DEGO-II, mais on a également cessé la production de ce système. En outre, on prévoit un problème au niveau de l’approvisionnement en pièces de rechange neuves d’ici 3 à 5 ans environ.
Quatre systèmes DEGO-II fonctionnent présentement correctement sur le NM Smallwood.
Compte tenu du degré de fiabilité prévu de cet important système pendant les prochaines 15 à 20 années de service, Fleetway recommande qu’il soit remplacé par un nouveau système faisant appel à une technologie de pointe.
Un système de remplacement possible est le DEGO-III fabriqué par ABB Marine Holland. Il s’agit d’un système numérique qui offre davantage de possibilités de réglages/configurations. Le prix budgétaire de cet équipement est d’environ 60 000.- euros (97 290.- CAD).
Un autre système de remplacement possible est celui de Rolls-Royce KaMeWa. Cette firme offre un système régulateur de vitesse électronique équivalent, mais au moment de déposer le rapport, Fleetway n’avait reçu aucun autre détail ni prix budgétaire de cette firme.
4. BATTERIES DU SYSTÈME D’AUTOMATISATION
Dans le cadre de l’étude sur le NM Caribou, Fleetway a été informé que les batteries pour l’alimentation en courant de 24 volts du système d’automatisation de moteur principal devraient être remplacées, car se sont les batteries d’origine. Comme on atteindra bientôt la mi-durée de vie du navire, Fleetway recommande le remplacement de ce groupe de batteries en même temps que le remplacement possible d’autres systèmes de commande et de surveillance des machines. La dimension et le nombre des nouvelles batteries, de même que la dimension du chargeur, devraient répondre aux besoins des nouveaux systèmes.
5. SYSTÈME DE SURVEILLANCE CCTV DANS LA SALLE DES MACHINES
Selon les discussions tenues avec le mécanicien en chef sur le NM Smallwood, ce dernier préconiserait l’installation d’un système de surveillance CCTV pour le contrôle de l’équipement essentiel et/ou à haut risque d’incendie dans la salle des machines. Un tel système offrirait également une meilleure sécurité aux membres d’équipage qui font des patrouilles ou de la maintenance dans la salle des machines.
On a contacté KONGSBERG Maritime AS afin d’obtenir une proposition et un prix budgétaire. Le coût de ce système est d’environ 28,963 CAD.

6
Marine Atlantic Refit Studies
MV “Caribou” & MV “Joseph & Clara Smallwood”
SYSTÈME DE SURVEILLANCE ET D'ALARME
Le système de surveillance et d’alarme actuel :
Sur le NM Smallwood, le système de surveillance et d’alarme comprend deux systèmes distincts : le système de surveillance et d’alarme ALSY-8 et le système d’information ABB nouvellement installé. Voir la Figure 1 : SCHÉMA DE PRINCIPE DU SYSTÈME ALSY-8 ET D’INFORMATION SUR LE NM SMALLWOOD.
Le système d’information ABB nouvellement installé comprend les trois sous-systèmes suivants : >
contrôle des ventilateurs du pont réservé aux automobiles; système de jaugeage réservoir; système de surveillance et d’alarme de température de paliers de moteur principal.
Le système d’information ABB nouvellement installé comprend les logiciels suivants : processeur PM861K02 redondant (deux AC800M) installé dans l’armoire du système
d’information actuel; unités de décision et sources d’alimentation électrique redondantes installées dans
l’armoire du système d’information actuel; un poste d’opérateur installé sur la console de surveillance des machines; un poste d’opérateur installé sur le pont; un ensemble de logiciel installé dans le PC du bureau du mécanicien en chef.
Sur le NM Caribou, le système de surveillance et d’alarme comprend le système de surveillance et d’alarme ALSY-8 seulement. Le système de jaugeage réservoir est d’Auxitrol, et il s’agit d’un système autonome. Voir la Figure 2 : SCHÉMA DE PRINCIPE DU SYSTÈME ALSY-8 ET DE JAUGEAGE RÉSERVOIR SUR LE NM CARIBOU.
Voici les lacunes du système de surveillance et d’alarme actuel :
Le système ALSY-8 n’étant plus en production depuis quelques années, il n’y a plus de pièces de rechange neuves. La firme ABB Marine Holland possède une certaine quantité de pièces de rechange remises à neuf dont les cartes de circuits imprimés ont été nettoyés et testées, et bien qu’ABB Marine Holland tente d’offrir un service de soutien pour ce système, elle n’est plus en mesure d’offrir à ses techniciens une formation sur ce système.
Les pièces de rechange sont dispendieuses, car les vieilles cartes de circuits imprimés doivent être nettoyées et testées.
L’imprimante d’alarmes installée à l’intérieur de la console de surveillance des machines ne fonctionne plus depuis quelques années et on a fini par la désactiver. Il n’y a plus d’enregistrement des alarmes depuis longtemps.
Certains signaux d’alarme ont été reliés à l’ALSY-8, mais ces signaux ne peuvent parvenir au moniteur de l’ECC ni au moniteur du bureau du mécanicien en chef, car le logiciel n’a pas été mis à jour.
La lecture du signal analogique n’est plus fiable à cause de la détérioration des cartes de circuits imprimés.
Il est impossible d’imprimer les alarmes et les données à des fins d’analyse des défaillances.
Le système ne dispose plus d’aucune voie libre pour connecter et surveiller d’importants signaux.
Dans le cadre de l’étude sur le NM Caribou, Fleetway a été informé que toutes les voies du système ALSY-8 étaient utilisées et que par conséquent il était impossible de connecter davantage de signaux au système actuel. En outre, plusieurs signaux doivent partager une même voie. Par exemple, il n’y a qu’une seule voie d’alarme pour les alarmes de bas niveau de réservoir collecteur d’huile de graissage des trois moteurs Diesel auxiliaires. Lorsque cette alarme est déclenchée, les membres d’équipage doivent vérifier les trois moteurs pour trouver lequel présente cet état anormal.
Il n’y a plus aucune voie disponible pour connecter un nouvel équipement. Par exemple, six nouvelles pompes de prélubrification ont été installées pour les paliers d’arbre principal,

7
l’électricien en chef préconise l’ajout de six nouveaux signaux d’alarme basse pression au système de surveillance et d’alarme, mais comme il est impossible de le faire sur l’ALSY-8, il a dû se résoudre à installer six nouveaux voyants sur l’ECC qui indique visuellement l’état anormal, mais sans alarme sonore.
Conclusions et recommandations :
Le système de surveillance et d’alarme des NM Smallwood et Caribou doit sans aucun doute être remplacé.
On a contacté deux firmes relativement à ce remplacement, soit ABB Marine Holland et KONGSBERG Maritime AS.
Dépose du système de surveillance et d’alarme ALSY-8
Figure 3 : DÉPOSE DU SYSTÈME ALSY-8 SUR LE NM SMALLWOOD
Tous les composants du système de surveillance et d’alarme ALSY-8 actuel doivent être remplacés à l’exception des armoires des cubicules C1 et C2 dans la salle de commande des machines, de deux groupes avertisseur sonore/feu rotatif dans la salle des machines, et du boîtier de raccordement. Il faut remplacer les portes des cubicules C1 et C2; de même que les cartes de circuits imprimés à l’intérieur des cubicules C1 et C2. On pourra conserver les câbles entre les transducteurs et les terminaux à l’intérieur des cubicules C1 et C2 du système ALSY-8. Les systèmes ALSY-8 des NM Caribou et Smallwood étant semblables, la procédure de dépose sera pratiquement la même pour les deux navires.
Voici une liste des composants qui doivent être déposés :
panneau d’alarme de passerelle;
dispositif d’affichage (VDU) dans le bureau du mécanicien en chef;
panneau d’alarme de cabine dans la chambre à coucher du mécanicien en chef;
panneau d’alarme de cabine du second mécanicien;
panneau d’alarme de cabine du mécanicien principal no 1;
panneau d’alarme de cabine du mécanicien principal no 2;
panneau d’alarme de cabine du mécanicien principal no 3;
panneau d’alarme de cabine de poste d’équipage;
VDU sur la console de surveillance des machines;
imprimante à l’intérieur de la console de surveillance des machines;
panneau de sélection du mécanicien;
toutes les unités E/S et cartes de circuits imprimés du système ALSY 8 à l’intérieur des cubicules C1 et C2.
Nota : Le circuit d’alimentation sans coupure (UPS) actuel sera réévalué en fonction des besoins en alimentation électrique du nouveau système.
Conformément aux études qui ont été faites sur les navires, Fleetway recommande trois options relativement au nouveau système de surveillance et d’alarme : Option 1 : Remplacement du système ALSY-8 ; Option 2 : Intégrer des boutons poussoirs marche/arrêt / inverseurs sur la console de surveillance des machines dans le nouveau système de surveillance et d’alarme ; Option 3 : Intégrer le système de contrôle des ballasts actuel au nouveau système de surveillance et d’alarme.
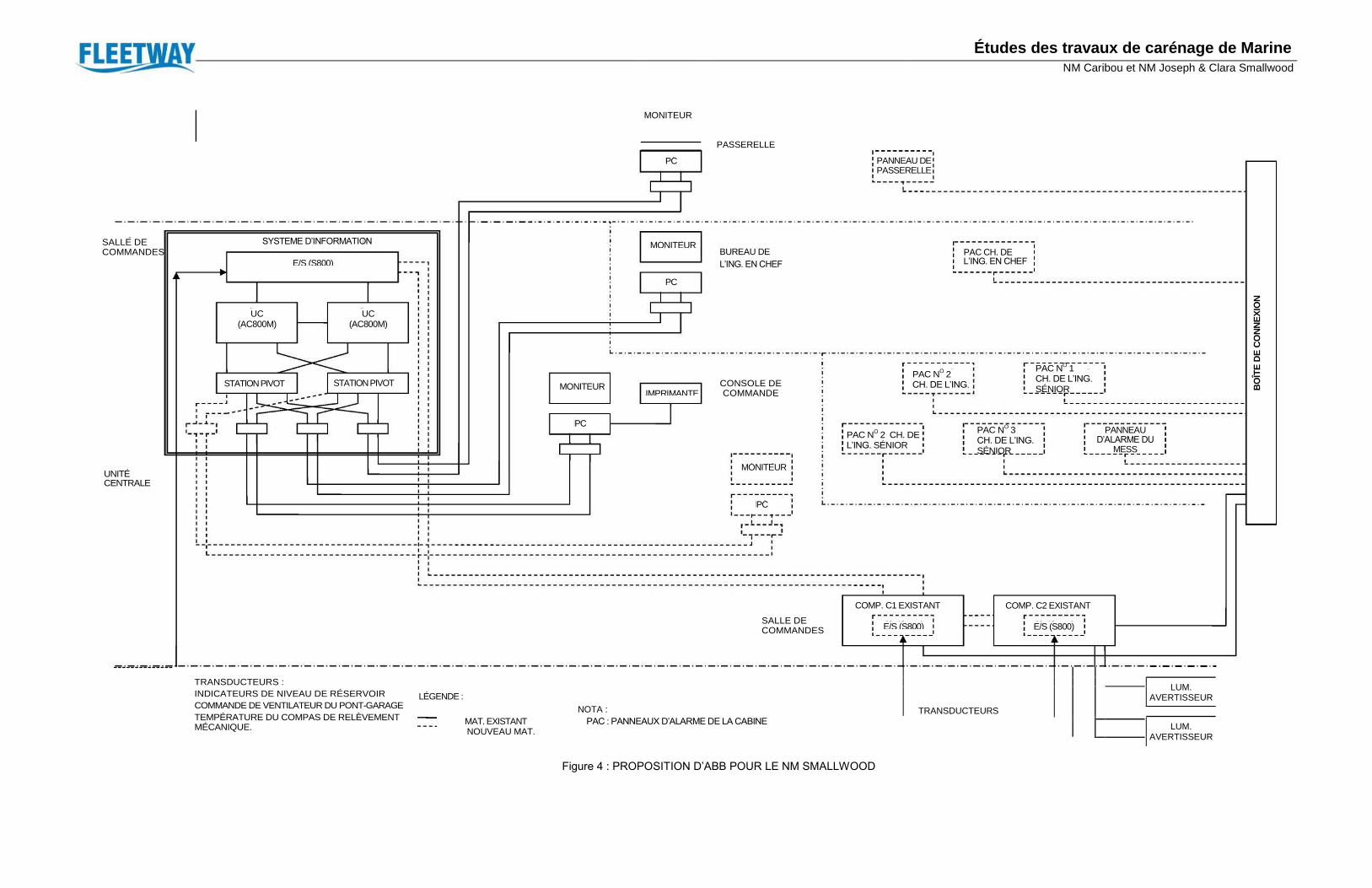
Proposition d’ABB Marine Holland (Option 1) Figure 4 : PROPOSITION D’ABB RELATIVE AU NM SMALLWOOD, Figure 5 : PROPOSITION D’ABB RELATIVE AU NM CARIBOU, et Annexe A. (Nota : Il y a des écarts entre les propositions suivantes et l’Annexe A, et ces écarts devront être résolus au moment de la conception de production.)
Le nouveau système d’information d’ABB Marine Holland vient d’être récemment installé sur le NM Smallwood; le système de jaugeage réservoir d’Auxitrol a été installé sur le NM Caribou il y a environ un an. Comme ces deux systèmes ne sont pas identiques, les propositions pour le nouveau système de surveillance et d’alarme différeront également pour les deux navires. Les différences entre les deux propositions feront en sorte que les deux navires disposeront de fonctions de surveillance et de commande équivalentes.

8
Marine Atlantic Refit Studies
MV “Caribou” & MV “Joseph & Clara Smallwood”
NM Smallwood :
Étant donné que les processeurs AC800M redondants du système d’information offrent une capacité suffisante pour traiter les volumes du système de surveillance et d’alarme ALSY-8, aucun autre processeur n’est requis. Le matériel suivant sera inclus dans le nouveau système de surveillance et d’alarme :
Un poste d’opérateur sur la console de surveillance des machines. (Ce poste d’opérateur sera entièrement redondant avec le poste d’opérateur installé sur la console de surveillance des machines par le nouveau système d’information. Si un problème quelconque survient sur l’un de ces postes, le membre d’équipage dispose de toutes les fonctions d’exploitation et de surveillance sur l’autre poste. En outre, lorsque tout fonctionne normalement, un poste d’opérateur peut être configuré de manière à surveiller des paramètres importants tels que la température des gaz d’échappement de moteur principal et de l’eau du circuit caloporteur de cylindre, tandis que l’autre poste peut servir pour les commandes et d’autres alarmes.)
Un panneau d’alarme de passerelle.
Six panneaux d’alarme de cabine pour le mécanicien en chef, le second mécanicien, les mécaniciens principaux n
o 1, n
o 2 et n
o 3 et le poste d’équipage.
Des unités E/S S800 pour 216 signaux analogiques (4 à 20 mA, 0 à 10 V, thermocouple, etc.) et 343 signaux binaires.
Des images d’ensemble pour afficher toute l’information requise sur les écrans (la quantité requise sera déterminée ultérieurement).
NM Caribou :
Afin que les deux navires maintiennent le même niveau de fonctions de surveillance et de commande, le nouveau système de surveillance et d’alarme comprendra toutes les fonctions de surveillance et d’alarme du système ALSY-8, le contrôle des ventilateurs du pont réservé aux automobiles, et la surveillance des températures de moteur principal. En outre, les signaux d’alarme en provenance du système de jaugeage réservoir Auxitrol, tels que la défaillance du système de jaugeage réservoir et les niveaux anormaux de réservoir, peuvent être reliés au nouveau système de surveillance et d’alarme. Le nouveau système de surveillance et d’alarme comprendra les matériels suivants :
Deux postes d’opérateur sur la console de surveillance des machines.
Une imprimante à sortie papier.
Un poste d’opérateur de passerelle.
Un poste d’opérateur dans le bureau du mécanicien en chef (si le prix du poste d’opérateur est significativement plus élevé que celui d’un PC ordinaire, ce dernier est recommandé).
Un processeur PM861K02 redondant (deux AC800M).
Une unité de décision et sources d’alimentation électrique. Un panneau d’alarme de passerelle.
Six panneaux d’alarme de cabine pour le mécanicien en chef, le second mécanicien, les mécaniciens principaux n
o 1, n
o 2 et n
o 3 et le poste d’équipage.
Des unités E/S S800 pour 216 signaux analogiques (4 à 20 mA, 0 à 10 V, thermocouple, etc.) et 343 signaux binaires.
Une unité E/S S800 pour 40 signaux de thermocouples pour les température de paliers de moteur principal.
Une unité E/S S800 pour le contrôle des ventilateurs du pont réservé aux automobiles.
• Des images d’ensemble pour afficher toute l’information requise sur les écrans (la quantité requise sera déterminée ultérieurement).
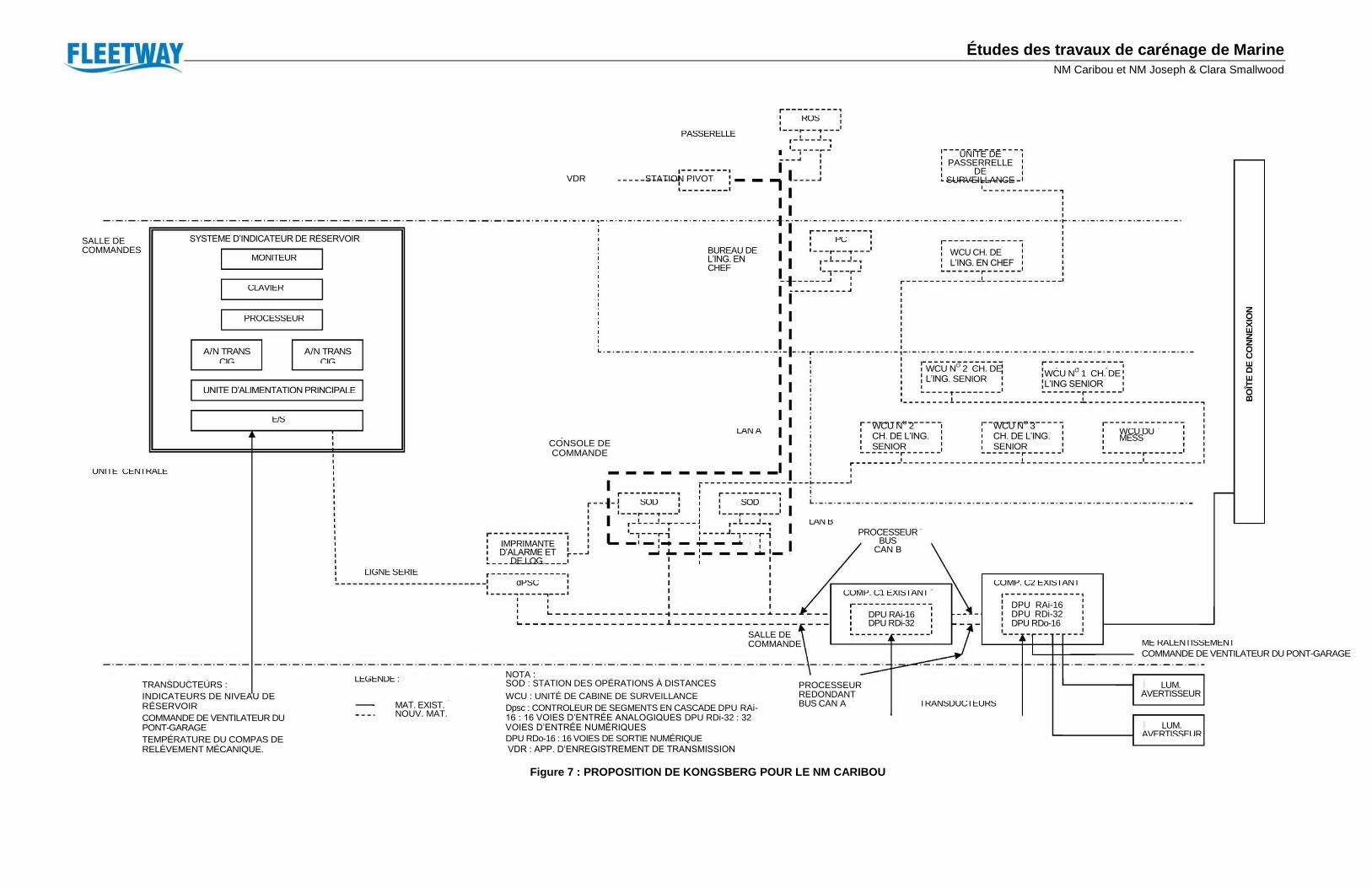
Proposition de KONGSBERG Maritime AS (Option 1) Figure 6 : PROPOSITION DE KONGSBERG RELATIVE AU NM SMALLWOOD, Figure 7 : PROPOSITION DE KONGSBERG RELATIVE AU NM CARIBOU, et Annexe B.
(Nota : Il y a des écarts entre les propositions suivantes et l’Annexe B, et ces écarts devront être résolus au moment de la conception de production.)
Les différences entre les deux propositions feront en sorte que les NM Smallwood et Caribou disposeront de fonctions de surveillance et de commande équivalentes.

9
Marine Atlantic Refit Studies
MV “Caribou” & MV “Joseph & Clara Smallwood”
NM Smallwood :
Les matériels suivants seront inclus dans le nouveau système de surveillance et d’alarme :
Deux postes d’opérateur à commande à distance (ROS) sur la console de surveillance des machines.
Une imprimante d’alarmes et de données.
Un PC dans le bureau du mécanicien en chef.
Un panneau de passerelle de vigie.
Six unités de surveillance de cabine pour le mécanicien en chef, le second mécanicien, les mécaniciens principaux n
o 1, n
o 2 et n
o 3 et le poste d’équipage.
Un contrôleur de segment biprocesseur (dPSC) pour construire une ligne série entre le système d’information nouvellement installé et le nouveau système de surveillance et d’alarme.
Dix-sept DPU RAi-16 pour 216 entrées de signaux analogiques.
Douze DPU RDi-32 pour 343 entrées de signaux binaires.
Un DPU RD0-16.
Un HUB pour l’interface avec le VDR.
Des tableaux à schémas des machines (la quantité requise sera déterminée ultérieurement).
NM Caribou :
Les matériels suivants seront inclus dans le nouveau système de surveillance et d’alarme :
Deux postes d’opérateur à commande à distance (ROS) sur la console de surveillance des machines.
Un postes d’opérateur à commande à distance (ROS) sur la passerelle.
Une imprimante d’alarmes et de données.
Un PC dans le bureau du mécanicien en chef.
Un panneau de passerelle de vigie.
Six unités de surveillance de cabine pour le mécanicien en chef, le second mécanicien, les mécaniciens principaux no 1, no 2 et no 3, et le poste d’équipage.
Un contrôleur de segment biprocesseur (dPSC) pour construire une ligne série entre le système d’information nouvellement installé et le nouveau système de surveillance et d’alarme.
Vingt DPU RAi-16 pour environ 216 entrées de signaux analogiques.
Quatorze DPU RDi-32 pour 343 entrées de signaux binaires.
Quatre DPU RD0-16.
Un HUB pour l’interface avec le VDR.
Des tableaux à schémas des machines (la quantité requise sera déterminée ultérieurement).
Option 2 : Intégrer des boutons poussoirs marche/arrêt / inverseurs sur la console de surveillance des machines dans le nouveau système de surveillance et d’alarme (le même pour les NM Caribou et Smallwood) :
Dans le cadre des études qui ont été faites sur les navires, on a constaté que la console de surveillance des machines comportait un grand nombre de boutons poussoirs marche/arrêt de pompe, de sélecteurs marche/arrêt/auto, et de voyants d’indication de fonctionnement. De plus, ces composants ne sont généralement pas en bon état, certains sont sales, des plaques signalétiques sont imprécises et il y a d’autres anomalies. Voir la Photographie 1 : Boutons poussoirs marche/arrêt et sélecteurs de la console de surveillance des machines et la Photographie 2 : Boutons poussoirs marche/arrêt et inverseurs de la console de surveillance des machines.
Par conséquent, Fleetway recommande d’intégrer tous ces boutons poussoirs, inverseurs et voyants d’indication de fonctionnement dans le nouveau système de surveillance et d’alarme. Un matériel limité étant requis pour inclure ces fonctions de commande, il s’agit d’une solution économique. L’espace ainsi libéré pourra être utilisé par les membres d’équipage pour l’enregistrement quotidien des données.

10
Marine Atlantic Refit Studies MV “Caribou” & MV “Joseph & Clara Smallwood”
Proposition d’ABB Marine Holland :
Un processeur PM861K02 redondant (deux AC800M).
Des unité E/S S800 pour 100 entrées numériques.
Des unité E/S S800 pour 200 sorties numériques.
Cinq images d’ensemble pour afficher toute l’information requise sur les écrans (la quantité requise sera confirmée au moment de la conception de production).
Proposition de Kongsberg Maritime AS :
Un contrôleur de segment biprocesseur (dPSC).
Dix DPU RIo-c2, comprenant chacun huit voies d’entrées numériques et huit voies de sorties numériques.
Sept DPU RDo-16 à seize voies de sorties numériques.
Deux tableaux à schémas des machines (la quantité requise sera confirmée au moment de la conception de production).
Photographie 1 : Boutons poussoirs marche/arrêt et sélecteurs de la console de surveillance des machines

11
Marine Atlantic Refit Studies
MV “Caribou” & MV “Joseph & Clara Smallwood”
Photographie 2 : Boutons poussoirs marche/arrêt et inverseurs de la console de surveillance des
machines

12
Marine Atlantic Refit Studies
MV “Caribou” & MV “Joseph & Clara Smallwood”
Option 3 : Intégrer le système de contrôle des ballasts actuel dans le nouveau système de surveillance et d’alarme (le même pour les NM Caribou et Smallwood).
Dans le cadre des études qui ont été faites sur les navires, on a constaté qu’un panneau de contrôle des ballasts est situé à l’intérieur de la salle de commande des machines. Voir la Photographie 3 : Panneau de contrôle des ballasts du NM Smallwood et la Photographie 4 : Panneau de contrôle des ballasts du NM Caribou.
Étant donné que le système de jaugeage réservoir sera intégré au nouveau système de surveillance et d’alarme et qu’il sera possible d’indiquer sur les moniteurs du nouveau système les volumes et les niveaux de remplissage réservoir de chaque réservoir de ballast, Fleetway recommande d’intégrer le système de contrôle des ballasts dans le nouveau système de surveillance et d’alarme afin de partager de l’information utile en provenance du système de jaugeage réservoir pendant l’utilisation des vannes et pompes de contrôle des ballasts. Pour ce faire, aucun matériel spécial n’est requis à l’exception des unités ordinaires d’entrées et de sorties numériques. Le système de contrôle des ballasts actuel commande l’ouverture et la fermeture de 25 vannes de ballast, le fonctionnement à grande vitesse et basse vitesse, ainsi que la commande marche/arrêt de pompe d'assèchement et de ballastage, ainsi que la commande marche/arrêt de pompe d'assèchement, de ballastage et d’incendie.
Proposition d’ABB Marine Holland :
Six unités E/S S800 pour entrées numériques (la quantité requise sera confirmée au moment de la conception de production).
Huit unités E/S S800 pour entrées numériques (la quantité requise sera confirmée au moment de la conception de production).
Cinq images d’ensemble pour afficher toute l’information requise sur les écrans (la quantité requise sera confirmée au moment de la conception de production).
Proposition de Kongsberg Maritime AS :
Quatre DPU RDi-32, comprenant chacun 32 voies d’entrées numériques.
Quatre DPU RDo-16, comprenant chacun 16 voies de sorties numériques.
Un DPU RIo-c2, comprenant chacun 8 voies d’entrées numériques et 8 voies de sorties numériques.
Un tableau à schémas des machines

13
Photographie 3 : Panneau de contrôle des ballasts du NM Smallwood

14
Photographie 4 : Panneau de contrôle des ballasts du NM Caribou
Marine Atlantic Refit Studies
MV “Caribou” & MV “Joseph & Clara Smallwood”

UN AUTRE ÉLÉMENT DONT IL FAUT TENIR COMPTE DANS LA MISE À NIVEAU DU SYSTÈME D’ALARME ET DE SURVEILLANCE :
Le NM Caribou et le NM Smallwood ont été enregistrés sous les règlements et les règles de LR sans que les notations de classe soient associées à l’automatisation et au contrôle de la machinerie.
Les deux notations de classe suivantes sont classifiées pour l’automatisation et le contrôle de la machinerie, ce qui est spécifié dans Lloyd’s Register – Rules and Regulations for the Classification of Ships, Part 1 – Regulations :
CMSS – Compartiment(s) machines sans surveillance Cette notation peut être assignée lorsque les arrangements sont tels que le navire peut être utilisé avec les compartiments machines non surveillés. Cela dénote que l’équipement de contrôle a été arrangé, posé et testé conformément aux règles de LR, ou à des règles équivalentes à celles de LR.
PCC – Machinerie utilisée à partir d’un poste de contrôle centralisé Cette notation peut être assignée lorsque les arrangements sont tels que la machinerie peut être utilisée avec une supervision continue à partir d’un poste de contrôle centralisé. Cela dénote que l’équipement de contrôle a été arrangé, posé et testé conformément aux règles de LR, ou à des règles équivalentes à celles de LR.
Satisfaction de l’exigence du PCC
Avantages de cette façon de faire
Améliore la fiabilité de l’équipement/des systèmes
Les membres d’équipage/les mécaniciens peuvent se concentrer sur la maintenance ou le diagnostic au lieu de patrouiller dans le compartiment machines
Réduire la charge de travail du personnel en fonction
Les dessins/les guides énumérés à la section portant sur les documents applicables sont vérifiés afin de comparer les règles de LR à l’équipement/aux systèmes existants à bord des navires .
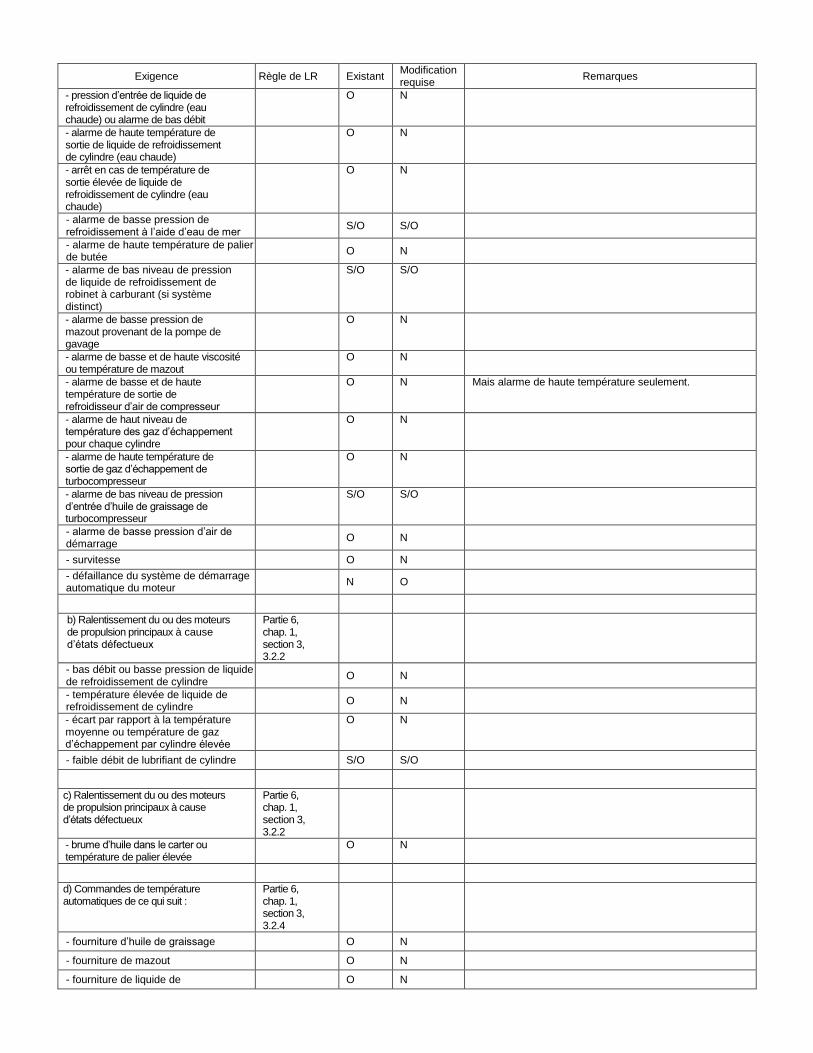
Tableau 1 : Vérification de la liste – comparaison des règles de LR à l’équipement/aux systèmes existants à bord des navires
Exigence Règle de LR Existant Modification requise
Remarques
1. Supervision continue à partir d’un poste de contrôle centralisé
Partie 6, chap. 1, section 5, 5.1.1
Note : O signifie « oui »; N signifie « non »; S/O signifie « sans objet ».
- compresseurs d’air N O - hélice à pas contrôlable O N - système de production d’électricité O N - incinérateurs N O L’incinérateur a été posé, mais n’a pas été utilisé depuis
longtemps.
- machinerie de propulsion principale, y compris auxiliaires essentiels
O N
- système d’entreposage et de transfert de mazout (purificateurs et réchauffeurs d’huile)
O N
- système de production de vapeur (chaudières et leur équipement auxiliaire)
N O
2. Contrôles, alarmes et dispositifs
de protection pour les moteurs de propulsion
Partie 6, chap. 1, section 5, 5.1.3
a) Alarmes - alarme de bas niveau d’huile de graissage dans le carter
O N
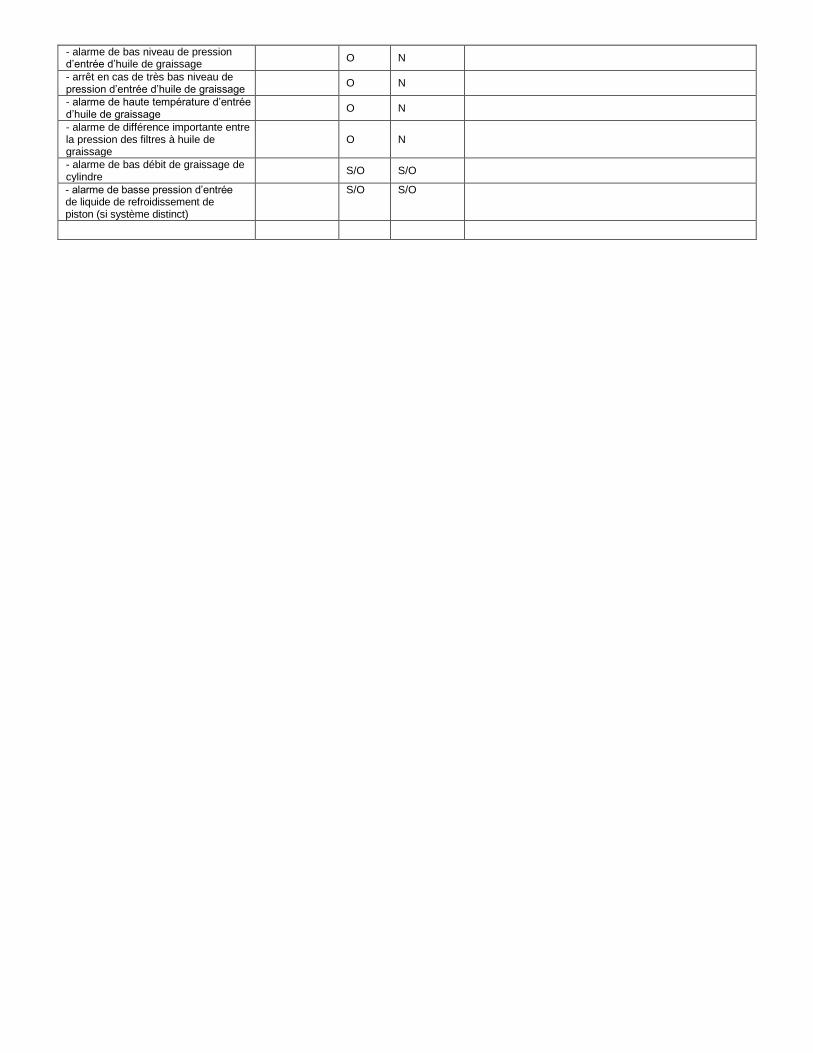
- alarme de bas niveau de pression d’entrée d’huile de graissage
O N
- arrêt en cas de très bas niveau de pression d’entrée d’huile de graissage
O N
- alarme de haute température d’entrée d’huile de graissage
O N
- alarme de différence importante entre la pression des filtres à huile de graissage
O N
- alarme de bas débit de graissage de cylindre
S/O S/O
- alarme de basse pression d’entrée de liquide de refroidissement de piston (si système distinct)
S/O S/O
Exigence Règle de LR Existant Modification requise
Remarques
- pression d’entrée de liquide de refroidissement de cylindre (eau chaude) ou alarme de bas débit
O N
- alarme de haute température de sortie de liquide de refroidissement de cylindre (eau chaude)
O N
- arrêt en cas de température de sortie élevée de liquide de refroidissement de cylindre (eau chaude)
O N
- alarme de basse pression de refroidissement à l’aide d’eau de mer
S/O S/O
- alarme de haute température de palier de butée
O N
- alarme de bas niveau de pression de liquide de refroidissement de robinet à carburant (si système distinct)
S/O S/O
- alarme de basse pression de mazout provenant de la pompe de gavage
O N
- alarme de basse et de haute viscosité ou température de mazout
O N
- alarme de basse et de haute température de sortie de refroidisseur d’air de compresseur
O N Mais alarme de haute température seulement.
- alarme de haut niveau de température des gaz d’échappement pour chaque cylindre
O N
- alarme de haute température de sortie de gaz d’échappement de turbocompresseur
O N
- alarme de bas niveau de pression d’entrée d’huile de graissage de turbocompresseur
S/O S/O
- alarme de basse pression d’air de démarrage
O N
- survitesse O N - défaillance du système de démarrage automatique du moteur
N O
b) Ralentissement du ou des moteurs de propulsion principaux à cause d’états défectueux
Partie 6, chap. 1, section 3, 3.2.2
- bas débit ou basse pression de liquide de refroidissement de cylindre
O N
- température élevée de liquide de refroidissement de cylindre
O N
- écart par rapport à la température moyenne ou température de gaz d’échappement par cylindre élevée
O N
- faible débit de lubrifiant de cylindre S/O S/O
c) Ralentissement du ou des moteurs de propulsion principaux à cause d’états défectueux
Partie 6, chap. 1, section 3, 3.2.2
- brume d’huile dans le carter ou température de palier élevée
O N
d) Commandes de température automatiques de ce qui suit :
Partie 6, chap. 1, section 3, 3.2.4
- fourniture d’huile de graissage O N - fourniture de mazout O N - fourniture de liquide de O N

refroidissement de cylindre
- fourniture de liquide de refroidissement de robinet à carburant
S/O S/O
e) L’indication de la pression d’air de démarrage doit être fournie à chaque poste de contrôle à partir duquel il est possible de démarrer les moteurs de propulsion principaux
Partie 6, chap. 1, section 3, 3.2.6
- salle de contrôle de moteur O N
- passerelle N N Le moteur principal ne peut être démarré à partir de la passerelle.
f) Une utilisation prolongée dans une plage de vitesse restreinte doit être évitée automatiquement; sinon, une indication des plages de vitesse de type restreinte doit être fournie à chaque poste de contrôle.
Partie 6, chap. 1, section 3, 3.2.8
N O Fleetway a entendu dire qu’il y a une plage de vitesse restreinte, mais il n’y a pas d’indications sur la passerelle ou dans la salle de contrôle de moteur. Cependant, le moteur fonctionne normalement en mode de vitesse constante autre qu’en mode combinateur; donc, il n’est pas dans la plage de vitesse restreinte.

Exigence Règle de LR Existant Modification requise
Remarques
3. Commandes, alarmes et dispositifs de protection pour chaudières (princ., aux., et autres)
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.5
a) Alarmes - bas niveau d’eau O N Une analyse plus approfondie est nécessaire concernant les
notes 1, 2 et 3 du tableau 1.3.4 de la partie 6, chap. 1, section 3.
- alarme de haut niveau d’eau O N - niveau d’eau du deuxième étage élevé
Une analyse plus approfondie est nécessaire.
- pression de sortie du surchauffeur ou du tambour à vapeur, élevée et basse
O N
- température élevée de vapeur surchauffée
N O Une analyse plus approfondie est nécessaire, et la classe ou TC doit être consulté.
- température élevée de vapeur désurchauffée
N O Une analyse plus approfondie est nécessaire, et la classe ou TC doit être consulté.
- basse pression d’air de combustion (l’alimentation en mazout des brûleurs doit être coupée automatiquement)
O N L’arrêt des brûleurs doit faire l’objet d’une analyse plus approfondie.
- basse pression de mazout O N - haute/basse viscosité ou température de mazout
O N
- flamme de brûleur et défaut d’allumage
O N
b) Contrôle automatique de ce qui suit : Partie 6, chap.
1, section 3, 3.5.2
- système de combustion Une analyse plus approfondie est nécessaire.
- viscosité ou température de mazout, mazout lourd seulement
Une analyse plus approfondie est nécessaire.
- niveau d’eau de tambour de chaudière
O N
- niveau d’eau de dégazeur lorsqu’applicable
Une analyse plus approfondie est nécessaire.
- pression de vapeur surchauffée lorsqu’applicable
Une analyse plus approfondie est nécessaire.
- température de vapeur surchauffée lorsqu’applicable
Une analyse plus approfondie est nécessaire.
- pression de vapeur désurchauffée lorsqu’applicable
Une analyse plus approfondie est nécessaire.
- température de vapeur désurchauffée lorsqu’applicable
Une analyse plus approfondie est nécessaire.
4. Commandes, alarmes et dispositifs de protection pour moteurs auxiliaires et autres moteurs
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.9
a) Alarmes - température d’entrée d’huile de graissage élevée
O N
- alarme de basse pression d’entrée d’huile de graissage
O N
- arrêt en cas de basse pression d’entrée d’huile de graissage
O N
- alarme de haute température de sortie de liquide de refroidissement
O N
- arrêt en cas de haute température de sortie de liquide de refroidissement
O N
- Bas débit ou basse pression de liquide de refroidissement
O N
- viscosité ou température élevée ou basse d’entrée de mazout (mazout lourd seulement)
O N

- survitesse O N - pression d’air de démarrage basse N O - fuite de mazout O N
b) Contrôle automatique de la viscosité ou de la température pour les moteurs brûlant du mazout lourd
O N

Exigence Règle de LR Existant Modification requise
Remarques
5. Commandes, alarmes et dispositifs de protection pour hélices à pas contrôlable et unités de poussée de type transversal
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.10
a) Alarmes pour hélice à pas contrôlable
- pression du circuit hydraulique basse O N - bas niveau du réservoir d’alimentation en huile hydraulique
O N
- température élevée de l’huile hydraulique
O N
- défaillance de l’alimentation en électricité du système de contrôle entre le poste de contrôle à distance et l’actionneur hydraulique
N O
- surcharge de moteur de propulsion S/O S/O
b) Alarmes de propulseur - pression du circuit hydraulique basse O N - bas niveau du réservoir d’alimentation en huile hydraulique
O N
- température élevée de l’huile hydraulique
N O
- défaillance de l’alimentation en électricité du système de contrôle entre le poste de contrôle à distance et l’actionneur hydraulique
N O
- surcharge de moteur de propulsion O N
c) Source d’alimentation alternative ou de secours de moyen d’actionnement pour contrôler le pas des hélices doit être fournie. Démarrage automatique de la pompe de secours.
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.10.2
O N
d) hélice à pas contrôlable : Un indicateur de vitesse d’arbre et un indicateur de pas doivent être fournis à chaque poste à partir duquel il est possible de contrôler la vitesse de l’arbre ou le pas d’hélice.
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.10.3
O N
e) Lorsque des unités de poussée de type transversal sont commandées à distance, des moyens doivent être fournis au poste de contrôle à distance pour arrêter l’unité de propulsion.
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.10.4
O N
f) Des unités de poussée de type transversal doivent être munies d’un indicateur de pas ou d’un moyen d’indiquer la direction de la poussée à chaque poste à partir duquel il est possible de contrôler le pas d’hélice.
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.10.5
O N
6. Commandes, alarmes et dispositifs de protection pour système électrique
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.12
a) Alarmes - haute et basse tension de barre O N

omnibus
- basse fréquence de barre omnibus O N - avertissement de délestage des charges
O N
7. Commandes, alarmes et dispositifs de protection pour appareil à gouverner
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.13
O N
8. Commandes, alarmes et dispositifs de protection pour toutes sortes de machines
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.15
a) Alarmes - bas niveau de réservoir d’huile de graissage de tube d’étambot
O N
- température élevée de palier de tube d’étambot
O N
- bas niveau de réservoirs de liquide de refroidissement
Une analyse plus approfondie est nécessaire.

Exigence Règle de LR Existant Modification requise Remarques
- niveau bas et haut de caisse de mazout journalière
O N
- température élevée de caisses de mazout journalières
O N
- température élevée de caisses de décantation à mazout
O N
- haut niveau de citernes à résidus O N - bas niveau de réservoirs d’eau d’alimentation
O N
- joint à eau brisé de purificateur Pour chaque purificateur, il n’y a qu’une seule alarme commune branchée au système d’alarme et de surveillance. Une analyse plus approfondie du purificateur est nécessaire.
- température d’entrée d’huile de purificateur élevée
idem
- arrêt automatique en cas de défaillance d’huile de graissage de compresseur d’air
Pour chaque compresseur, il n’y a qu’une seule alarme commune branchée au système d’alarme et de surveillance. Une analyse plus approfondie sur la commande du compresseur d’air est nécessaire.
- température élevée d’air de déchargement de compresseur d’air
idem
- basse pression de circuit de commande hydraulique
b) Contrôle et alarme de haute température de réchauffeurs d’huile
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.15.4
Une analyse plus approfondie est nécessaire.
c) Réservoirs à mazout. Éliminer les risques de débordement.
Partie 6, chap. 1, section 5, 5.1.3, section 3, 3.15.6
Une analyse plus approfondie est nécessaire.
9. Commandes, alarmes et dispositifs de protection pour détection de niveau dans la cale.
Partie 6, chap. 1, section 5, 5.1.3, section 4, 4.6
O N
10. Commandes, alarmes et dispositifs de protection pour système de détection d’incendie.
Partie 6, chap. 1, section 5, 5.1.3, section 2, 2.8
O N
11. Poste de contrôle centralisé de la machinerie.
Partie 6, chap. 1, section 5, 5.2
O N

Après avoir fait une comparaison avec l’exigence spécifiée dans Lloyd’s Register – Rules and Regulations for the Classification of Ships, Part 6 – Control, Electrical, Refrigeration and Fire, on découvre que les différences ne sont pas importantes. Pour avoir des détails, veuillez consulter le tableau 1 : Vérification de la liste – comparaison des règles de LR à l’équipement/aux systèmes existants à bord des navires. Fleetway a établi que le NM Caribou et le NM Smallwood peuvent appliquer la notation de classe PCC sans trop de difficultés et sans que cela ne coûte trop cher.
Respect de l’exigence de CMSS
Afin de respecter l’exigence de CMSS, toutes les modifications/améliorations liées à l’augmentation de la notation de classe à PCC doivent être ajoutées. De plus, les impacts subséquents doivent être considérés aussi :
Un système d’alarme de sécurité de mécanicien (système d’alarme d’homme mort) est nécessaire.
Ce système est autonome et utilisé pour assurer la sécurité du mécanicien dans l’exercice de ses fonctions. Lorsque le mécanicien de garde pénètre dans la salle des machines, il doit activer ce système en mettant en marche la boîte départ/arrêt à clé qui doit être posée près des portes de la salle des machines. Normalement, un panneau de commande de ce système doit être posé sur la console de commande de moteur; l’intervalle de l’alarme, p. ex. 30 minutes, peut être ajusté à partir de ce panneau. Donc, lorsque le mécanicien travaille dans la salle de commande de moteur ou dans la salle des machines, il doit réinitialiser ce système à toutes les 30 minutes en appuyant sur la boîte de réinitialisation posée dans toute la salle des machines.
Un signal d’alarme sonore doit être fourni sur la console de la passerelle avec un bouton poussoir pour arrêter l’avertisseur ou en accuser réception.
Les pièces suivantes sont nécessaires pour le système d’alarme de sécurité du mécanicien :
1 panneau de commande (minuterie – pourrait régler la période d’alarme) 7 boîtes départ/arrêt
15 boîtes de réinitialisation.
Un système d’alarme et de signalement dans la salle des machines.
Le système d’alarme et de signalement doit être placé dans la salle des machines pour alerter le personnel de la salle des machines si un problème survient ou si le téléphone sonne dans la salle des machines ou dans la salle de contrôle de moteur.
Dans les salles des machines, une quantité adéquate de boîtes de signalement avec des lampes triangulaires de type logo et des clignotants rouges/jaunes et verts/blancs doit être posée, avec les affiches d’identification d’alarme/de signalisation éclairées suivantes :
alarme-incendie – triangle rouge avec LOGO D’INCENDIE alarme à CO2 ou alarme à halon – triangle rouge avec LOGO DU CO2 ou LOGO DU HALON alarme de défaillance de salle des machines – triangle jaune avec LOGO DE ROUE
DENTÉE téléphone autogénérateur et téléphone automatique – triangle blanc laiteux avec LOGO DE
TÉLÉPHONE transmetteur d’ordres – triangle blanc laiteux avec LOGO DE TÉLÉGRAPHE alarme de sûreté – triangle jaune avec LOGO D’UN HOMME DANS UNE ROUE DENTÉE.
En même temps que l’affichage de l’alarme dans les boîtes de signalement, les feux qui tournent (avec globe rouge, jaune ou vert/blanc) et les sirènes électriques doivent être actionnés. Les affiches d’alarme et les moyens sonores doivent être conformes au code d’alarme (Alarm-Code) de l’IMO.
Le signal d’appel du téléphone autogénérateur et du téléphone automatique doit être arrêté automatiquement si aucun accusé-réception ne suit dans un délai de 2 minutes.

Le compartiment machines à bord du NM Caribou et du NM Smallwood est passablement grand, et le nombre de feu/klaxon d’avertissement et de signalement n’est pas assez important; en effet, il y a seulement deux groupes de feux pivotants/klaxon pour l’alarme de défaillance de salle des machines se trouvant dans toute la salle des machines. Les klaxons et les feux de signalement servant à d’autres usages sont répartis dans tout le compartiment machines; donc, Fleetway suggère de poser un nombre adéquat de boîtes de signalement dans la salle des machines pour envoyer une alarme et un signal clairs aux personnes qui travaillent dans la salle des machines pour assurer la sécurité et une grande efficacité.
Fleetway a établi qu’il est possible de faire passer le NM Caribou et le NM Smallwood à la notation de classe CMSS sans modifications et frais importants.
À cause du fait que le parcours régulier de ces deux traversiers dure environ 6 – 9 heures entre North Sydney et Port-aux-Basques, ou environ 15 heures entre North Sydney et Argentia, on pourrait penser que CMSS n’est pas applicable au justifié dans le cas de ces deux navires. Cependant, si ces deux navires pouvaient être ragréés conformément à cette norme élevée, cela améliorerait la fiabilité d’équipements/de systèmes importants et diminuerait la charge de travail des membres d’équipage. SYSTÈME DE COMMANDE À DISTANCE D’HÉLICE À PAS CONTRÔLABLE ET DE MOTEUR PRINCIPAL
Renseignements concernant le système de commande à distance d’hélice à pas contrôlable et de moteur principal existant
À bord du NM Caribou et du NM Joseph & Clara Smallwood, les systèmes FAMP-S d’ASEA ont été posés. Fleetway s’est fait dire lors de l’examen des navires que ces systèmes équipant les deux traversiers travaillent adéquatement et presque sans avarie, sauf à deux ou trois reprises où un appel de service a été fait par ABB Marine Holland au cours des trois dernières années pour le NM Caribou; il y a aussi eu un problème de dérive (pas zéro) avec le NM Smallwood, qui pouvait bloquer l’embrayage du moteur principal en position embrayée.
Fleetway recommande que le convertisseur I/P (4-20 mA en pression pneumatique) fourni par KaMeWa soit étalonné de nouveau ou soit remplacé. Une autre solution potentielle est d’étudier la possibilité de remplacer le convertisseur I/P par un équivalent électrique/électronique pour éliminer les erreurs/écarts produits par la conversion.
Fleetway a contacté ABB Marine Holland et s’est fait dire que le système FAMP-S n’est plus fabriqué depuis longtemps. ABB Marine Holland dispose encore de certaines pièces de rechange, mais ces pièces seront écoulées d’ici 5 ans.
Choix possibles de remplacement de système de commande à distance d’hélice à pas contrôlable et de moteur principal
Les fournisseurs des systèmes d’hélice existants sont les suivants :
système de commande à distance d’hélice à pas contrôlable et de moteur principal : ASEA (ABB)
régulateur de vitesse électronique : ASEA (ABB)
hélice à pas contrôlable : KaMeWa
moteur principal : MAK.
Comme le système de commande à distance d’hélice à pas contrôlable et de moteur principal existant est fabriqué par ASEA (ABB), et que l’hélice à pas contrôlable est fabriquée par KaMeWa, Fleetway recommande de remplacer le tout auprès d’ABB ou de KaMeWa afin de diminuer les problèmes possibles avec les interfaces et les fonctions de système.
RCS800 – système de contrôle de propulsion de navire fabriqué par ABB Marine Holland
FAMP-S était un système de contrôle numérique de 8 octets, et 59 systèmes ont été posés pour les hélices à pas contrôlé entre 1980 et 1987. Après FAMP-S, quatre autre générations de systèmes de commande à distance de moteur principal ont été développées et posées à bord des navires. Il s’agit de FAMP-M, FAMP-200, FAMP III et RCS800.

RCS800 a été conçu grâce aux années d’expérience d’ABB en matière de propulsion; de plus, il est le descendant des types FAHM et FAMP de systèmes de commande à distance. L’équipement de RCS800 est le dispositif de commande AC800M, qui a été posé à bord du NM Smallwood pour le nouveau système de renseignements.
Présentement, le RCS800 a été vendu pour quatre navires seulement : deux exemplaires sont en train d’être installés et deux sont au stade de la conception. Les deux derniers sont destinés à une mise à niveau d’un navire de croisière (le Royal Princess de la compagnie P&O Cruises) avec aussi quatre moteurs principaux et deux arbres, qui sont semblables dans le cas du NM Caribou et du NM Smallwood. RCS800 est trop récent présentement, mais le carénage de mi-vie n’aurait pas lieu avant 3 ou 5 ans; à ce moment, le matériel et les logiciels du RCS800 pourraient en être au stade de la maturité. Alors, ça dépend de ce que l’on recherche.
Les articles principaux suivants seront nécessaires pour remplacer le FAMP du NM Caribou et du NM Smallwood (note : il y a des écarts entre les propositions présentées ici et celles de l’annexe A, qui devraient être éliminées au cours de la conception de production) :
sur la console de manœuvre centrale de la passerelle 2 panneaux d’utilisateur 2 panneaux d’urgence 1 transmetteur-récepteur à deux leviers 2 indicateurs d’hélice à pas contrôlable (cet instrument peut être réutilisé selon les
conditions) 2 indicateurs de régime (cet instrument peut être réutilisé selon les conditions) 1 consignateur d’ordres
sur deux consoles de manœuvre d’aileron de passerelle 2 transmetteurs-récepteurs à deux leviers 2 panneaux d’urgence 4 indicateurs d’hélice à pas contrôlable (cet instrument peut être réutilisé selon les
conditions) 4 indicateurs de régime (cet instrument peut être réutilisé selon les conditions)
dans la salle de commande des machines 2 unités centrales de système de commande à distance RCS800-P
sur ou dans la console de commande des moteurs 2 panneaux de commande de ECR 2 panneaux d’urgence 1 transmetteur-récepteur à deux leviers 4 systèmes de sécurité pour le moteur principal 2 indicateurs d’hélice à pas contrôlable (cet instrument peut être réutilisé selon les
conditions) 2 indicateurs de régime (cet instrument peut être réutilisé selon les conditions) 2 dispositifs de comptage des révolutions d’arbre (cet instrument peut être réutilisé selon les
conditions)
dans la salle des machines 2 récepteurs à levier unique.
Un autre fabricant éventuel est Rolls-Royce KaMeWa. Rolls-Royce KaMeWa a un système de contrôle d’hélice principal équivalent pour des hélices jumelles à pas contrôlable, mais Fleetway n’a pas reçu de proposition détaillée davantage et de prix de leur part avant le jour où le rapport est dû.
CONCLUSIONS ET RECOMMANDATIONS
Comme le système FAMP-S fonctionne adéquatement avec le NM Caribou et le NM Smallwood, et que les membres d’équipage le connaissent, il est sensé de le garder.
Cependant, concernant le prolongement de l’utilisation de ces traversiers de 15 à 20 ans supplémentaires,

ces deux traversiers auront des difficultés à obtenir des pièces de rechange de 2010. De plus, les pièces de rechange remises à neuf pourraient être très coûteuses et peu fiables à cause de leur âge et du fait qu’il y en a de moins en moins. De plus, plus aucun technicien en entretien expérimenté ne sera formé pour effectuer l’entretien de ce système. Donc, Fleetway a décidé que le système FAMP-S doit être remplacé.
RÉGULATEUR DE VITESSE ÉLECTRONIQUE
Renseignements concernant le régulateur de vitesse électronique existant
Quatre ensembles de DEGO-S ont été posés pour quatre moteurs principaux MAK sur le NM Caribou, et quatre ensembles de DEGO-II ont été posés pour quatre moteurs principaux MAK sur le NM Smallwood.
NM Caribou
La production du DEGO-S a cessé il y a longtemps, et il y a des pièces de rechange neuves ou remises à neuf disponibles. De plus, ABB Marine Holland peut encore en faire l’entretien.
Lors de l’examen du navire, Fleetway s’est fait dire que 4 régulateurs électroniques DEGO-S devraient être remplacés à cause des raisons suivantes qui ont causé beaucoup de problèmes au cours des derniers mois :
ils causent des problèmes de partage de charge entre les moteurs dérive de données
les barrettes à bornes sont détériorées il est si difficile de les garder réglés.
NM Smallwood
ABB Marine Holland offre encore du soutien, mais la production cesse graduellement, et il y aura un problème dans environ 3-5 ans avec les nouvelles pièces de rechange.
4 DEGO-II fonctionnent bien avec le Smallwood.
CONCLUSIONS ET RECOMMANDATIONS
Le régulateur de vitesse électronique est un système clé pour le système de commande à distance d’hélice à pas contrôlable et de moteur principal. Si la durée de vie du navire est prolongée de 15-20 ans de plus, alors le NM Caribou et le NM Smallwood auront des problèmes à obtenir des pièces de rechange et un service de grande qualité. De plus, la fiabilité de l’hélice sera un point d’inquiétude important. Donc, Fleetway recommande que le DEGO-S sur le NM Caribou et le DEGO-II sur le NM Smallwood soient remplacés par le DEGO-III.
Le nouveau DEGO-III est un système numérique, on y a ajouté des fonctions de diagnostic, et il est facile à mettre en service. Les propriétés du DEGO-II sont conservées.
Un autre avantage à remplacer le DEGO-II est que, si le FAMP-S doit être remplacé par le RCS800, le comportement du DEGO-III est beaucoup plus stable en plus d’être plus facile à régler et plus rapide/plus facile à mettre en service que le DEGO-II semblable.
Les éléments suivants du DEGO-III sont nécessaires pour remplacer le DEGO-S sur le NM Caribou et le NM Smallwood :
4 QHFQ 110, y compris logiciel de propulsion de base

2 logiciels de synchronisation d’arbre 2 logiciels de chargement/de déchargement 1 logiciel d’aide DEGO-III avec câble de communication.
Le DEGO-S et le DEGO-II peuvent aussi être remplacés par un produit Rolls-Royce KaMeWa. Rolls-Royce KaMeWa a un régulateur de vitesse électronique équivalent, mais Fleetway n’a pas reçu de proposition détaillée davantage et de prix de leur part avant le jour où le rapport est dû.
SYSTÈME DE SURVEILLANCE DE TYPE TÉLÉVISION EN CIRCUIT FERMÉ DANS LA SALLE DES MACHINES
À cause de sa conversation avec le mécanicien en chef du NM Smallwood, il préfère poser un système de surveillance de type télévision en circuit fermé pour surveiller l’équipement capital ou l’équipement à risque d’incendie élevé dans la salle des machines. De plus, ce système augmentera la sécurité des membres d’équipage qui patrouillent et effectuent du travail de maintenance dans la salle des machines. Si un incident se produisait dans la salle des machines, la personne en devoir dans la salle de contrôle des moteurs ou le mécanicien en chef pourrait le remarquer immédiatement grâce au moniteur, et des mesures immédiates pourraient être prises pour aider la personne sur place.
Les pièces suivantes sont recommandées pour chaque navire :
16 caméras sont requises pour l’équipement suivant :
2 pour 4 moteurs principaux
2 pour 3 moteurs diesel auxiliaires pour le service du bord
2 pour 2 tunnels d’arbre porte-hélice
2 pour 2 réducteurs
2 pour 2 appareils à gouverner (situés dans deux compartiments séparés)
2 pour 2 chaudières
1 pour le purificateur de diesel/de mazout lourd
3 pour les purificateurs d’huile
1 moniteur en couleurs dans la salle de commande des moteurs
1 moniteur en couleurs dans le bureau du mécanicien en chef (optionnel)
1 commutateur vidéo
1 unité d’alimentation.
Voir la figure 8 (SCHÉMA FONCTIONNEL DU RÉSEAU DE SURVEILLANCE DU SYSTÈME TVCF) et l’annexe C pour avoir des détails.
Études des travaux de carénage de Marine NM Caribou et NM Joseph & Clara Smallwood
Figure 1 : SCHÉMA DE PRINCIPE DU SYSTÈME ALSY-8 ET DU SYSTÈME D’INFORMATION DU NM SMALLWOOD
SALLE DE COMMANDES
UNITÉ CENTRALE
TRANSDUCTEURS :
INDICATEURS DE NIVEAU DE RÉSERVOIR
COMMANDE DE VENTILATEUR DU PONT-GARAGE
TEMPÉRATURE DU COMPAS DE RELÈVEMENT MÉCANIQUE.
UC (AC800M)
STATION PIVOT
SYSTÈME D’INFORMATION
E/S (S800)
SYSTÈME D’INFORMATION
UC (AC800M)
STATION PIVOT
NOTA :
PAC : PANNEAU D’ALARME DE LA CABINE
MONITEUR
PC
MONITEUR
MONITEUR
IMPRIMANTE
PC
PC
BUREAU DU CHEF
MÉCANIQUE
CONSOLE DE
COMMANDE
PASSERELLE
CONSOLE DE COMMANDE
SALLE DE COMMANDES
PAC NO 2
CH. DE L’ING.
VDU DU BUREAU
DE L’ING. EN CHEF
PANNEAU DE PASSERELLE
VDU ECC
COMP. C1 ALSY-8
PAC NO 2
CH. DE L’ING. EN
CHEF
TRANSDUCTEURS
IMPRIMANTE
PAC CH. DE L’ING. EN CHEF
PAC NO 3 CH.
DE L’ING. SENIOR P
COMP. C2 ALSY-8
ALARME ALSY-8 ET SYSTÈME DE
SURVEILLANCE
PAC NO 2 CH. DE
L’ING. SENIOR
PANNEAU SÉLEC. ING.
PANNEAU D’ALARME DU
MESS
LUM. AVERTISSEUR
LIGHT
LUM. AVERTISSEUR
BO
ÎTE
DE
CO
NN
EX
ION

Études des travaux de carénage de Marine NM Caribou et NM Joseph & Clara Smallwood
Figure 2 : SCHÉMA DE PRINCIPE DU SYSTÈME ALSY-8 ET DU SYSTÈME INDICATEUR DU NM CARIBOU
SALLE DE COMMANDES
A/N TRANS CIG
SYSTÈME INDICATEUR DU RÉSERVOIR
SYSTÈME INDICATEUR DU RÉSERVOIR
AUXITROL
UNITÉ D’ALIMENTATION PRINCIPALE
PROCESSEUR
CLAVIER
MONITEUR
E/S
A/N TRANS CIG
TRANSDUCTEURS :
INDICATEURS DE NIVEAU DE RÉSERVOIR
NOTA :
PAC: PANNEAUX D’ALARME DE LA CABINE
BUREAU DE L’ING. CHEF
CONSOLE DE COMMANDE
PASSERELLE
CONSOLE DE COMMANDE
SALLE DE COMMANDES
PAC NO 2
CH. DE L’ING. SÉNIOR SENIOR
VDU DU BUREAU
DE L’ING. EN CHEF
PANNEAU DE PASSERELLE
VDU ECC
COMP. C1 ALSY-8
PAC NO
2 CH. DE L’ING.
TRANSDUCTEURS
IMPRIMANTE
PAC CH. DE L’ING. EN
CHEF
PAC NO 3 CH. DE
L’ING SÉNIOR
COMP. C2 ALSY-8
ALARME ALSY-8 ET SYSTÈME DE
SURVEILLANCE
PAC NO 1
CH. DE L’ING. SENIOR
PANNEAU SÉLEC. ING.
PANNEAU D’ALARME DU
MESS
LUM. AVERTISSEUR
LUM. AVERTISSEUR
BO
ÎTE
DE
CO
NN
EX
ION

Figure 3 : ENLÈVEMENT DU ALSY-8 SUR NM SMALLWOOD
SALLE DE COMMANDES
UNITÉ CENTRALE
TRANSDUCTEURS :
INDICATEURS DE NIVEAU DE RÉSERVOIR
COMMANDE DE VENTILATEUR DU PONT-GARAGE
TEMPÉRATURE DU COMPAS DE RELÈVEMENT MÉCANIQUE.
UC (AC800M)
STATION PIVOT
SYSTÈME D’INFORMATION
E/S (S800)
SYSTÈME D’INFORMATION
UC (AC800M)
STATION PIVOT
MONITEUR
PC
MONITEUR
MONITEUR
IMPRIMANTE
PC
PC
BUREAU DE L’ING. EN CHEF
CONSOLE DE
COMMANDE
PASSERELLE
CONSOLE DE
COMMANDE
SALLE DE COMMANDES
PAC NO 2
CH. DE L’ING. SÉNIOR
VDU DU BUREAU
DE L’ING. EN CHEF
PANNEAU DE PASSERELLE
VDU ECC
COMP. C1 ALSY-8
PAC NO
2 CH. DE L’ING
TRANSDUCTEURS
IMPRIMANTE
PAC CH. DE L’ING. EN
PAC NO 3 CH.
DE L’ING SÉNIOR
COMP. C2 ALSY-8
ALARME ALSY-8 ET SYSTÈME DE
SURVEILLANCE
PAC NO 1 CH.
DE L’ING
NM Caribou et NM Joseph & Clara Smallwood
PANNEAU SÉLEC. ING.
Études des travaux de carénage de Marine
PANNEAU D’ALARME DU
MESS
LUM. AVERTISSEUR
LUM.
AVERTISSEUR
BO
ÎTE
DE
CO
NN
EX
ION
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
MONITEUR
PASSERELLE
Figure 4 : PROPOSITION D’ABB POUR LE NM SMALLWOOD
UNITÉ CENTRALE
SALLE DE COMMANDES
UC (AC800M)
STATION PIVOT
SYSTÈME D’INFORMATION
E/S (S800)
UC (AC800M)
STATION PIVOT
MONITEUR
PC
MONITEUR
IMPRIMANTE
PC
PC
BUREAU DE . CHIEF ENG. L’ING. EN CHEF
CONSOLE DE COMMANDE
MONITEUR
PC
SALLE DE COMMANDES
PAC NO 2 CH. DE
L’ING. SÉNIOR
COMP. C1 EXISTANT
E/S (S800)
PANNEAU DE PASSERELLE
PAC NO 2
CH. DE L’ING.
PAC CH. DE L’ING. EN CHEF
PAC NO 3
CH. DE L’ING. SÉNIOR
COMP. C2 EXISTANT
E/S (S800)
PAC NO 1
CH. DE L’ING. SÉNIOR
PANNEAU D’ALARME DU
MESS
BO
ÎTE
DE
CO
NN
EX
ION
TRANSDUCTEURS :
INDICATEURS DE NIVEAU DE RÉSERVOIR
COMMANDE DE VENTILATEUR DU PONT-GARAGE
TEMPÉRATURE DU COMPAS DE RELÈVEMENT MÉCANIQUE.
LUM. AVERTISSEUR LÉGENDE :
NOTA :
MAT. EXISTANT PAC : PANNEAUX D’ALARME DE LA CABINE NOUVEAU MAT.
TRANSDUCTEURS
LUM.
AVERTISSEUR

Études des travaux de carénage de Marine NM Caribou et NM Joseph & Clara Smallwood
Figure 5 : PROPOSITION D’ABB POUR LE NM CARIBOU
SALLE DE COMMANDES
LEGENDE :
TRANSDUCTEURS : INDICATEURS DE NIVEAU DU
RÉSERVOIR
MAT. EXIST. NOUV. MAT.
SYSTÈME INDICATEUR DU RÉSERVOIR
AUXITROL
A/N TRANS CIG
SYSTÈME D’INDICATEUR DE RÉSERVOIR
UNITÉ D’ALIMENTATION PRINCIPALE
PROCESSEUR
CLAVIER
MONITEUR
E/S
1. DEF. DU SYSTÈME D’INDICATEUR DE RÉSERVOIR
2. NIVEAU ANORMAL DU RÉSERVOIR
MICATRANS A/D
TRANSDUCTEURS NOTA :
PAC : PANNEAU D’ALARME DE LA CABINE
UC (AC800M)
Station pivot Station pivot
COMP. C1 EXISTANT
MONITEUR
PC
E/S (S800)
CONSOLE DE COMMANDE
UC (AC800M)
IMPRIMANTE
PASSERELLE
SALLE DE COMMANDES
CONSOLE DE
COMMANDE
MONITEUR
PC
MONITEUR
MONITEUR
PC
PC
PAC NO 2
CH. DE L’ING. SÉNIOR
TRANSDUCTEURS
COMP. C2 EXISTANT
PAC NO 2 CH.
DE L’ING.
BUREAU DE L’ING. EN
CHEF
E/S (S800)
PAC CH. DE L’ING. EN CHEF
PAC NO 3
CH. DE L’ING. SÉNIOR
PANNEAU DE PASSERELLE
PAC NO 1
CH. DE L’ING. SÉNIOR
LUM. AVERTISSEUR
LUM. AVERTISSEUR
PANNEAU D’ALARME DU
MESS
BO
ÎTE
DE
CO
NN
EX
ION
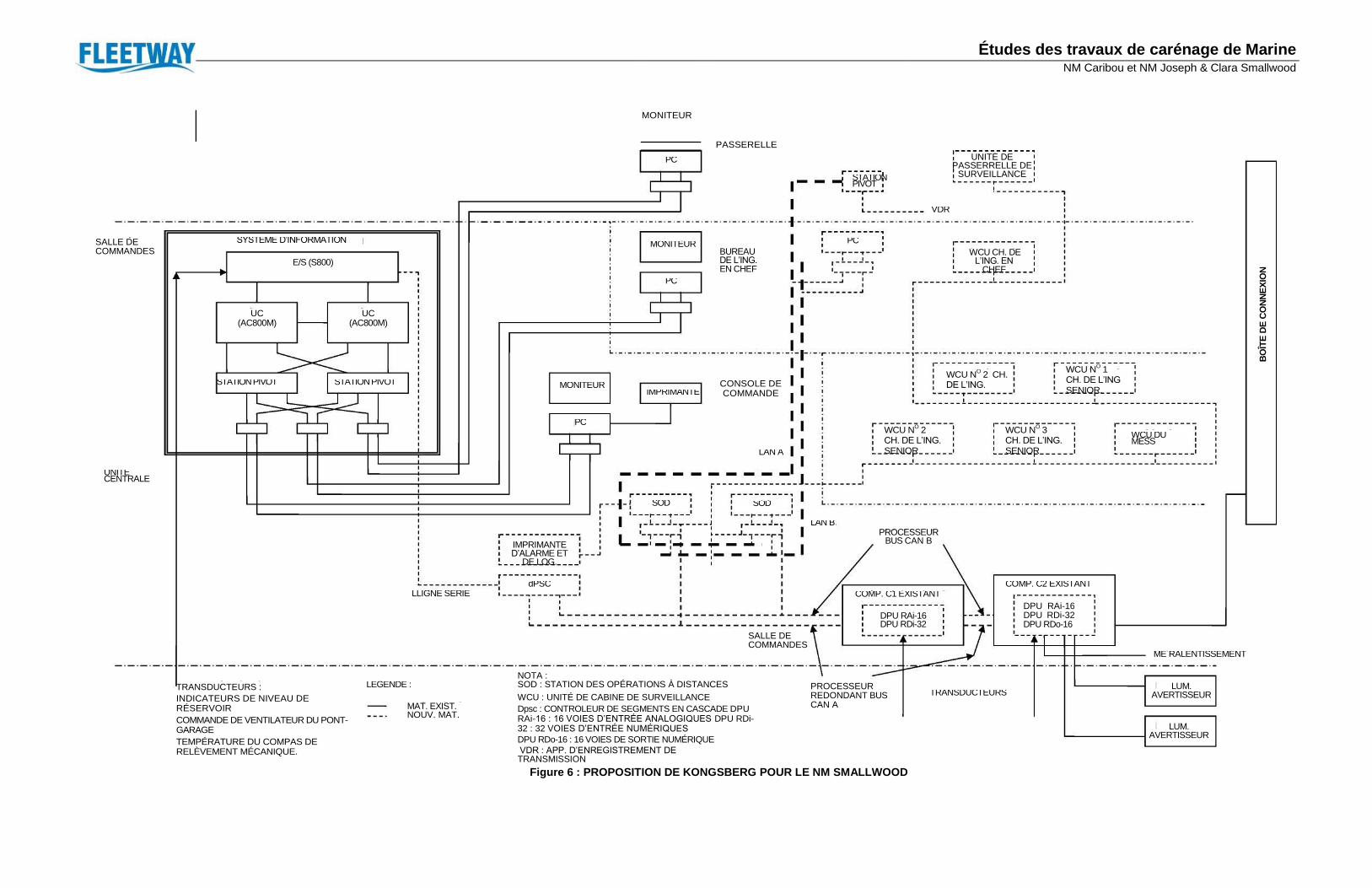
Figure 6 : PROPOSITION DE KONGSBERG POUR LE NM SMALLWOOD
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
MONITEUR
PASSERELLE
PC UNITÉ DE
PASSERRELLE DE SURVEILLANCE STATION
PIVOT
VDR
SYSTÈME D’INFORMATION PC MONITEUR BUREAU DE L’ING. EN CHEF
E/S (S800)
SALLE DE COMMANDES WCU CH. DE
L’ING. EN CHEF
PC
UC (AC800M)
UC (AC800M)
STATION PIVOT STATION PIVOT MONITEUR IMPRIMANTE
BO
ÎTE
DE
CO
NN
EX
ION
CONSOLE DE COMMANDE
WCU NO 2 CH.
DE L’ING.
WCU NO 1
CH. DE L’ING SENIOR.
PC
WCU DU MESS
WCU NO 2
CH. DE L’ING. SENIOR
WCU NO 3
CH. DE L’ING. SENIOR
LAN A
UNITÉ CENTRALE
SOD SOD
LAN B
IMPRIMANTE D’ALARME ET
DE LOG.
PROCESSEUR BUS CAN B
dPSC COMP. C2 EXISTANT LLIGNE SÉRIE COMP. C1 EXISTANT
DPU RAi-16 DPU RDi-32
DPU RAi-16 DPU RDi-32 DPU RDo-16
ME RALENTISSEMENT
SALLE DE COMMANDES
LÉGENDE : TRANSDUCTEURS
TRANSDUCTEURS :
INDICATEURS DE NIVEAU DE RÉSERVOIR
COMMANDE DE VENTILATEUR DU PONT-GARAGE
TEMPÉRATURE DU COMPAS DE RELÈVEMENT MÉCANIQUE.
.
MAT. EXIST. NOUV. MAT.
NOTA : SOD : STATION DES OPÉRATIONS À DISTANCES
WCU : UNITÉ DE CABINE DE SURVEILLANCE
Dpsc : CONTROLEUR DE SEGMENTS EN CASCADE DPU RAi-16 : 16 VOIES D’ENTRÉE ANALOGIQUES DPU RDi-32 : 32 VOIES D’ENTRÉE NUMÉRIQUES
DPU RDo-16 : 16 VOIES DE SORTIE NUMÉRIQUE
VDR : APP. D’ENREGISTREMENT DE TRANSMISSION
PROCESSEUR REDONDANT BUS CAN A
LUM. AVERTISSEUR
LUM. AVERTISSEUR
Études des travaux de carénage de Marine NM Caribou et NM Joseph & Clara Smallwood
Figure 7 : PROPOSITION DE KONGSBERG POUR LE NM CARIBOU
UNITÉ CENTRALE
SALLE DE COMMANDES
TRANSDUCTEURS :
INDICATEURS DE NIVEAU DE RÉSERVOIR
COMMANDE DE VENTILATEUR DU PONT-GARAGE
TEMPÉRATURE DU COMPAS DE RELÈVEMENT MÉCANIQUE.
A/N TRANS CIG
SYSTÈME D’INDICATEUR DE RÉSERVOIR
UNITÉ D’ALIMENTATION PRINCIPALE
PROCESSEUR
CLAVIER
MONITEUR
E/S
A/N TRANS CIG
LÉGENDE :
LIGNE SÉRIE
MAT. EXIST. NOUV. MAT.
IMPRIMANTE D’ALARME ET
DE LOG.
NOTA : SOD : STATION DES OPÉRATIONS À DISTANCES
WCU : UNITÉ DE CABINE DE SURVEILLANCE
Dpsc : CONTROLEUR DE SEGMENTS EN CASCADE DPU RAi-16 : 16 VOIES D’ENTRÉE ANALOGIQUES DPU RDi-32 : 32 VOIES D’ENTRÉE NUMÉRIQUES
DPU RDo-16 : 16 VOIES DE SORTIE NUMÉRIQUE
VDR : APP. D’ENREGISTREMENT DE TRANSMISSION
dPSC
CONSOLE DE COMMANDE
VDR STATION PIVOT
SOD
BUREAU DE L’ING. EN CHEF
PASSERELLE
LAN A
SOD
SALLE DE COMMANDE
PROCESSEUR REDONDANT BUS CAN A
ROS
LAN B
PC
COMP. C1 EXISTANT
PROCESSEUR BUS
CAN B
DPU RAi-16 DPU RDi-32
WCU NO 2
CH. DE L’ING. SENIOR
TRANSDUCTEURS
WCU NO 2 CH. DE
L’ING. SENIOR
UNITÉ DE PASSERRELLE
DE SURVEILLANCE
WCU CH. DE L’ING. EN CHEF
WCU NO 3
CH. DE L’ING. SENIOR
COMP. C2 EXISTANT
DPU RAi-16 DPU RDi-32 DPU RDo-16
WCU NO 1 CH. DE
L’ING SENIOR
WCU DU MESS
ME RALENTISSEMENT
COMMANDE DE VENTILATEUR DU PONT-GARAGE
LUM. AVERTISSEUR
LUM. AVERTISSEUR
BO
ÎTE
DE
CO
NN
EX
ION

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
VUE SUR LES MOTEURS PRINCIPAUX 1 ET 2
VUE SUR LES MOTEURS PRINCIPAUX 3 ET 4
VUE SUR L’APPAREIL À GOUVERNER PT
VUE SUR L’APPAREIL À GOUVERNER STBD
VUE SUR LA CHAUDIÈRE
VUE SUR LA CHAUDIÈRE STBD
VUE SUR LE TUNNEL D’ARBRE PT
VUE SUR LE TUNNEL D’ARBRE STBD
VUE SUR LA BOÎTE D’ENGRANAGE RÉDUCTEUR
VUE SUR LA BOÎTE D’ENGRANAGE RÉDUCTEUR STBD
VUE SUR L’ENGRANAGE RÉDUCTEUR STBD
VUE SUR LE MODULE PURIFICATEUR DO/HFO
VUE SUR LE MODULE PURIFICATEUR PT ME LO
VUE SUR LE MODULE PURIFICATEUR STBD ME LO
VUE SUR LA CENTRALE ÉLEC. DE BORD.
VUE SUR LA CENTRALE ÉLEC. DE BORD.
Figure 8: CCTV SURVEILLANCE SYSTEM BLOCK DIAGRAM
ALIMENT. ÉLEC.
ENTRÉE 115 V AC
SORTIE 24-28 VAC
COMMUTATEUR-MÉLANGEUR
PUISSANCE 115V PUISSANCE 115V PUISSANCE 115V
VD 1
VD 2
VD 3
VD 4
VD 5
VD 6
VD 7
VD 8
VD 9
VD 10
VD 11
VD 12
VD 13
VD 14
VD 15
CONSOLE DE SURVEILLANCE
MONITEUR DE SURVEILLANCE
OPTION BUREAU DE L’ING, EN CHEF
MONITEUR DE SURVEILLANCE

Revision 0
15 December 2004 A1 Machinery Control and Monitoring Systems
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
ANNEXE A PROPOSITION D’ABB MARINE
HOLLAND

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Fleetway À l’attention de : Mme Maggie Zhou Courriel : [email protected] À l’attention de : Ton Haasdijk
Notre référence :
AMT 4267 rev.0
Votre référence :
Marine Atlantic
Ligne privée :
+ 31-10-4078750
Télécopieur :
+31-10-4078445
Courriel :
ton. haasdijkl.abb.com
Date :
10 décembre 2004
Objet : Proposition budgétaire concernant le projet de réorganisation de J&C Smallwood et le Caribou. Madame M. Zhou, Je tiens à vous remercier pour la demande d’offre que vous avez soumissionnée. Nous avons le plaisir de vous offrir une proposition budgétaire, comme prescrit dans les pages ci-jointes : Réorganisation de systèmes d’automatisation à bord du NM Smallwood
et du NM caribou
Pour des détails techniques, veuillez vous référer à la documentation pertinente. Je vous prie d'accepter, Madame, l'expression de mes sentiments distingués. ABB par : ABB Marine Services & Systems Tom Haasdijk Fred van den Hoonaard Ventes et projets marines Gestionnaire du ministère de la Marine Les clauses administratives générales d’ABB s’appliquent à toutes offres et commandes entrantes ou sortantes ainsi qu’à tous les arrangements conclus avec notre entreprise. Sur demande, un exemplaire des clauses pertinentes à votre cas peut vous être envoyé immédiatement.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
1. Modalités et Conditions Prix : Nett, excl. BTW (VAT) pour les livraisons en 2005 Prix réajusté : Les prix doivent être réajustés de 0,5 % par mois pour les
livraisons effectuées après la date susmentionnée. Livraison : À l’usine Rotterdam (incoterms 2000) Délai de livraison : Les délais sont « à discuter » dans les semaines suivant la
commande écrite et l’acheminement des informations techniques requises.
Essai : Essais de routine normalisée d’ABB Ingénierie : Inclus F.A.T. : Non inclus Installation : Non inclus Installation des matériels : Non inclus Mise en service : Non inclus Essai en mer : Non inclus Garantie : Elle est valide pour une période de 18 mois après la
livraison et une période maximale de 12 mois après l’essai en mer. Le déplacement et les frais d’hébergement sont exclus de la période de garantie et doivent être acquittés par l’acheteur.
Peinture : Norme ABB Pièces de rechange : Non inclus Manuels : Inclus Paiement : Les paiements seront étalés comme suit : 30 % au
moment de la commande, 60 % à la livraison du matériel, 10 % après la mise en service. Les paiements doivent être effectués dans les 30 jours suivant la date de la commande.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Classification : Lloydes Validité de proposition : 3 mois après la date de délivrance 2. Prix budgétaires NM J & C Smallwood : RCS 800/P : 185.000 euros DEGO III : 60.000 euros Remplacement du Alsy 8 (Option I) : 107.200 euros Intégration du contrôle de pompes (Option II) : 43.500 euros Intégration du système de ballasts (Option III) : 25.000 euros Toutes les options sont conformes à la régulation de l’offre, comme prescrit dans la proposition AMT4267 rev.0, et tous les autres éléments comme les capteurs, les interrupteurs, les leviers, etc. qui ne sont pas mentionnés dans la régulation de l’offre ne sont pas inclus dans les prix budgétaires proposés. NM Caribou : RCS 800/P : 185.000 euros DEGO III : 60.000 euros Remplacement du Alsy 8 (Option I) : 168.500 euros Intégration du contrôle de pompes (Option II) : 43.500 euros Intégration du système de ballasts (Option III) : 25.000 euros Toutes les options sont conformes à la régulation de l’offre, comme prescrit dans la proposition AMT4267 rev.0, et tous les autres éléments comme les capteurs, les interrupteurs, les leviers, etc. qui ne sont pas mentionnés dans la régulation de l’offre ne sont pas inclus dans les prix budgétaires proposés.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Table des matières 1. Modalités et Conditions ............................................................................ 2. Prix budgétaires........................................................................................ 3. Services associés au projet ......................................................................
3.1 Ingénierie et gestion de projet .......................................................... 3.2 Analyse 3.3 Dessins et documents 3.4 Manuels 3.5 Test d’acceptation usine (TAU) 3.6 Renseignements fournis par le propriétaire
4. Présentation des nouveaux systèmes proposés pour la modernisation ............................................................................................
4.1 Système d’hélices à pas variable (pour le Caribou et le Smallwood) .......................................................................................
4.2 Aperçu technique.............................................................................. 5. Portée pour la fourniture de matériel pour le RCS800P ........................... 6. DEGO III, Système de régulateur numérique (pour Caribou et
Smallwood) ............................................................................................... 7. Ensemble des articles fournis pour le système DEGO III ......................... 8. Systèmes d'automatisation 800xA (J & C Smallwood) .............................
8.1. m/v. J & C Smallwood ..................................................................... 8.2. Option 1 : .......................................................................................... Ensemble des articles fournis pour le système d’alarme ........................... 8.3. Option 2 : .......................................................................................... Ensemble des articles fournis pour l’option 2 .............................................. 8.4. Option 3 : .......................................................................................... Ensemble des articles fournis pour l’option 3 ..............................................
9. Systèmes d'automatisation 800xA (Caribou) ............................................ 9.1. Option 1 : .......................................................................................... Ensemble des articles fournis pour le système d’alarme ........................... 9.2. Option 2 : .......................................................................................... Ensemble des articles fournis pour l’option 2 .............................................. 9.3. Option 3 : .......................................................................................... Ensemble des articles fournis pour l’option 3 ..............................................

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
3. Services associés au projet 3.1 Ingénierie et gestion de projet Après la signature du projet, ABB constituera une équipe de projet, dirigée par le gestionnaire de projet, et nommera un ingénieur de projet qui sera responsable de la gestion et des communications courantes avec le client jusqu’à la livraison, l’installation et la mise en service. 3.2 Analyse Avant d’entreprendre les travaux techniques relatifs aux nouveaux systèmes, il est important de comprendre comment fonctionnent les systèmes existants et de déterminer comment intégrer ces fonctionnalités aux nouveaux systèmes. Une analyse sera donc nécessaire. Celle-ci devrait durer une semaine et nécessiter la présence d’un ingénieur. 3.3 Dessins et documents ABB doit fournir des schémas complets de tous les systèmes connexes. Ces documents doivent comprendre tous les schémas de connexion nécessaires aux travaux d’installation. Les dessins pour le raccordement des câbles aux boîtes de jonction et le cheminement des câbles par les boîtes de jonction entre les bornes du système et les capteurs ne sont pas inclus, car ils sont la responsabilité de l’entreprise chargée de l’installation électrique. L’ensemble de dessins de l’installation électrique comprend :
les schémas de dimensions et de disposition;
les schémas d’ensemble;
les schémas du circuit de commande;
les schémas de connexion. Les dessins et les listes de matériaux doivent être produits à l’ordinateur. Les symboles utilisés doivent être conformes aux normes IEC 617 et NEN 5152. Notre logiciel CAD appliqué nous permet de convertir les dessins en fichiers DXF. Tous les dessins pertinents doivent être envoyés à l’avance, en trois exemplaires, afin qu’ils puissent être approuvés avant le début des travaux. Des mesures seront prises pour faire approuver les plans et les dessins nécessaires par la société de classification. Un exemplaire des plans et des dessins, avec indication de l’approbation de classe, seront retournés. Tous les dessins et les documents doivent être en anglais.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
3.4 Manuels ABB doit fournir deux ensembles complets des manuels connexes. Ces manuels comprennent les manuels d’exploitation spécialisés et les manuels de produits. Les manuels d’instruction conformes à l’exécution devraient être livrés dans les 8 semaines suivant les essais en mer. Les manuels doivent contenir, dans la mesure du possible :
les dessins conformes à l’exécution;
les documents du constructeur sur les matériaux livrés par des tierces parties et inclus dans le présent cahier des charges;
les manuels de produits. Tous les manuels doivent être en anglais. 3.5 Test d’acceptation usine (TAU) L’ingénieur de projet préparera une procédure de test qui sera envoyée au client, en temps utile, avant le test. Tous les systèmes seront branchés et une démonstration de leur fonctionnement comme s’ils étaient à bord du navire sera faite au propriétaire, dans la mesure du possible. Le propriétaire sera invité à assister au TAU. Il incombe au propriétaire d’inviter la société de classification. Tout le matériel utilisé doit être d’un type approuvé par les principales sociétés de classification. 3.6 Renseignements fournis par le propriétaire Il incombe au propriétaire de fournir tous les renseignements techniques nécessaires à l’exécution des travaux techniques relatifs aux nouveaux systèmes d’automatisation.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
4. Présentation des nouveaux systèmes proposés pour la modernisation
RCS800-P, système d’hélices à pas variable (pour le Caribou et le Smallwood, disposition identique).
Dego III (pour le Caribou et le Smallwood, disposition identique).
800xA (système d’automatisation étendu, TI industrielle). Les fonctionnalités des nouveaux systèmes d’automatisation doivent être les mêmes que celles des systèmes existants. 4.1 Système d’hélices à pas variable (pour le Caribou et le Smallwood) Le système de commande de propulsion conçu par ABB Rotterdam est fondé sur le dernier modèle de contrôleur AC800M. L’AdvantController 800M d’ABB et un système de commande de processus de pointe à haut rendement qui peut traiter des milliers de données d’entrée et de sortie. Il peut être relié directement ou à distance au contrôleur. Des périphériques d’entrée-sortie répartis, des contrôleurs logiques programmables et des convertisseurs pour moteurs d’entraînement peuvent y être reliés au moyen d’un bus de terrain. L’interface est compatible avec les systèmes d’autres fournisseurs. Les valeurs mesurées peuvent être enregistrées et liées à des alarmes et des enregistreurs d’événements. Une vaste gamme de fonctions peuvent être programmées dans l’AdvantController 800M, p. ex. commandes logiques et séquentielles, traitement de données et de texte, arithmétique, établissement de rapports, commande de mise en position et de régulation, y compris commandes PID évoluées et commandes adaptatives automatiques.
Matériel du contrôleur principal Contrôleur programmable de pointe AC800M Approbation de type des principales sociétés de classification Périphériques d’entrée-sortie S800 Modules de communication pour différents protocoles comme Modbus,
Profibus, etc.
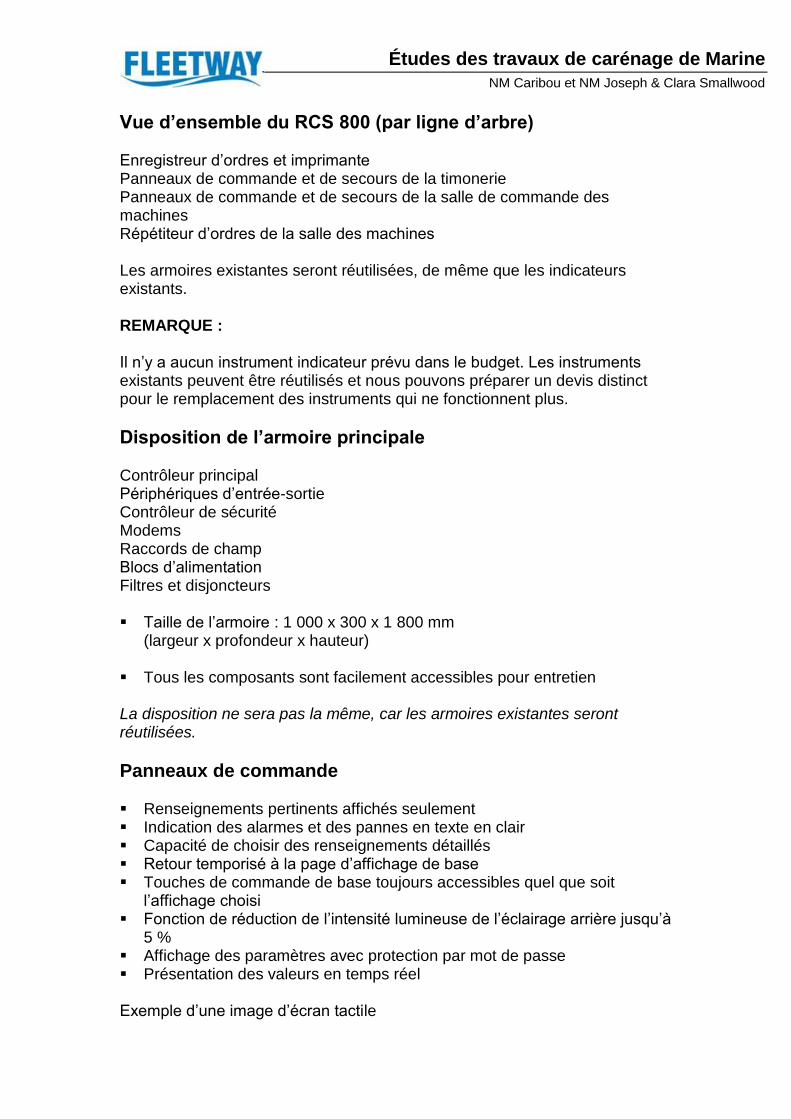
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Vue d’ensemble du RCS 800 (par ligne d’arbre) Enregistreur d’ordres et imprimante Panneaux de commande et de secours de la timonerie Panneaux de commande et de secours de la salle de commande des machines Répétiteur d’ordres de la salle des machines Les armoires existantes seront réutilisées, de même que les indicateurs existants. REMARQUE : Il n’y a aucun instrument indicateur prévu dans le budget. Les instruments existants peuvent être réutilisés et nous pouvons préparer un devis distinct pour le remplacement des instruments qui ne fonctionnent plus.
Disposition de l’armoire principale Contrôleur principal Périphériques d’entrée-sortie Contrôleur de sécurité Modems Raccords de champ Blocs d’alimentation Filtres et disjoncteurs Taille de l’armoire : 1 000 x 300 x 1 800 mm
(largeur x profondeur x hauteur) Tous les composants sont facilement accessibles pour entretien La disposition ne sera pas la même, car les armoires existantes seront réutilisées.
Panneaux de commande Renseignements pertinents affichés seulement Indication des alarmes et des pannes en texte en clair Capacité de choisir des renseignements détaillés Retour temporisé à la page d’affichage de base Touches de commande de base toujours accessibles quel que soit
l’affichage choisi Fonction de réduction de l’intensité lumineuse de l’éclairage arrière jusqu’à
5 % Affichage des paramètres avec protection par mot de passe Présentation des valeurs en temps réel Exemple d’une image d’écran tactile

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
4.2 Aperçu technique Équipement de la timonerie
Deux panneaux de commande de passerelle (écrans tactiles TFT) Panneau de commande comportant commandes, système de gestion des alarmes et affichages d’état (panneau TFT).
Deux panneaux de secours de passerelle (câblés) Panneau de secours comportant des commutateurs permettant de neutraliser le système de sécurité, le système d’arrêt de secours et les commandes de secours des hélices à pas variables au moyen de boutons-poussoirs à bascule (augmentation/diminution). Transmetteur d’ordres de la timonerie Un émetteur récepteur d’ordres à deux leviers. Pour la commande à distance des deux hélices à pas variable (mode commande passerelle) ou la transmission d’ordres (mode transmetteur d’ordres). Le transmetteur d’ordres comprend deux moteurs d’entraînement pour le système à arbre électrique relié aux transmetteurs d’ordres des ailerons de passerelle. Indicateurs Non inclus. Les instruments existants peuvent être réutilisés.
Équipement des ailerons de passerelle
Transmetteurs d’ordres Un émetteur récepteur d’ordres à deux leviers. Pour la commande à distance des deux hélices à pas variable (mode commande passerelle) ou la transmission d’ordres (mode transmetteur d’ordres). Le transmetteur d’ordres comprend deux moteurs d’entraînement pour le système à arbre électrique relié aux transmetteurs d’ordres des ailerons de passerelle. Indicateurs Non inclus. Les instruments existants peuvent être réutilisés.
Équipement de la salle de commande des machines
Deux panneaux de commande (écrans tactiles TFT) Panneau de commande comportant commandes, système de gestion des alarmes et affichages d’état (panneau TFT). Deux panneaux de secours (câblés) Panneau de secours comportant des commutateurs permettant de neutraliser le système de sécurité, le système d’arrêt de secours et les

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
commandes de secours des hélices à pas variables au moyen de boutons-poussoirs à bascule (augmentation/diminution). Transmetteur d’ordres Un émetteur récepteur d’ordres à deux leviers Pour la commande à distance des hélices à pas variable (mode commande de la salle de commande des machines, mode transmetteur d’ordres). Indicateurs Non inclus. Les instruments existants peuvent être réutilisés. Deux systèmes RCS800-P Les deux armoires existantes seront réutilisées pour y placer le nouveau matériel du système de commande à distance et du système de sécurité. Chaque armoire comportera :
Un système de commande de processus AC800M avec fonctions de commandes automatiques pour les moteurs principaux et les hélices à pas variable.
Deux systèmes de sécurité reliés au bus de terrain AC31. Équipement de la salle des machines
Deux répéteurs d’ordres Répéteur d’ordres à un levier servant à répondre aux ordres reçus par le transmetteur d’ordres de la timonerie ou de la salle de commande des machines.
Fonctions de commande automatique
Le système de commande à distance RCS800-P comprend les fonctions de commande automatique suivantes :
Démarrage et arrêt des moteurs principaux
Programme de montée en vitesse
Commande de régime
Commande de charge
Commande des hélices à pas variable Le nouveau système de commande à distance aura les mêmes fonctionnalités que le système FAMP-S existant.
Démarrage et arrêt des moteurs principaux
Il est possible de démarrer et d’arrêter les moteurs principaux à partir des panneaux de commande de la salle de commande des machines.
Verrouillage du démarrage Lorsque le verrouillage du démarrage est enclenché, il n’est pas possible de démarrer le moteur au moyen du système de commande

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
automatique. Le verrouillage est enclenché dans les conditions suivantes :
la pression d’air de démarrage est faible;
les hélices à pas variable ne sont pas à zéro;
le vireur est embrayé;
la vanne de démarrage pneumatique principale est fermée. Démarrage des moteurs principaux
Il est possible de démarrer manuellement les moteurs principaux à partir des panneaux de commande de la salle de commande des machines. Activer la fonction de démarrage sur le boîtier de commande local. Si les moteurs ne démarrent pas (temps de démarrage max. atteint), une alarme se déclenchera.
Arrêt des moteurs principaux
Il est possible d’arrêter manuellement les moteurs principaux à partir des panneaux de commande de la salle de commande des machines.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Programme de démarrage
Le programme de démarrage régule le point fixe des moteurs
principaux lors du démarrage.
Principe de fonctionnement
Lorsque le mode de commande automatique (à distance) des
moteurs principaux, le programme de démarrage limite la charge
des moteurs en envoyant une valeur de limite de charge au
contrôleur de charge (voir la section CONTRÔLEUR DE
CHARGE). Après le démarrage des moteurs, la limite du
programme de démarrage est modifiée à une valeur de démarrage
d’environ 70 % (paramètre). Cette valeur augmente lorsque la
charge des moteurs atteint la valeur de démarrage. Cette
augmentation continue tant qu’une charge supérieure est exigée.
La durée totale du programme de démarrage (c.-à-d. de la valeur
de démarrage à 100 %) est d’environ 20 minutes (paramètre).
Lorsque la charge des moteurs diminue, la valeur limite suit la
charge réelle des moteurs, sans toutefois diminuer en dessous de
la valeur de démarrage.
Programme d’urgence
Le programme de démarrage peut être contourné à l’aide d’un
interrupteur de surpassement situé sur les panneaux de
commande. Lorsque cet interrupteur est activé, le programme de
démarrage des moteurs est rendu inactif.
Tenue d’axe
Lorsque les moteurs sont opérés en mode manuel (p. ex.,
commande d’urgence) ou lorsque le programme d’urgence est
activé, la limite du programme de démarrage suit la charge réelle
des moteurs. Lorsque les moteurs sont remis en contrôle
automatique ou lorsque le programme d’urgence est désactivé, le
programme de démarrage reprend à partir de la valeur de charge
réelle des moteurs, afin d'assurer une transition sans heurts.
Commande du régime moteur
Le régime moteur est calculé en fonction de la valeur de réglage
de la charge. Lorsque le fonctionnement se fait à vitesse constante
ou lorsque les commandes sont assurées à partir du pont, le
régime moteur est réglé à une valeur constante.
Commande automatique
Lorsque le système de commande automatique (à distance) des
moteurs est choisi, le régime moteur est régulé par un système de
contrôle à distance. Si un système de commande non automatique
(p. ex., contrôle local) est choisi, le système de contrôle à distance
suit le régime moteur réel, afin d’assurer une transition sans
heurts lors du retour au système de commande automatique.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Changement de taux de valeur de réglage
Lorsque la mannette de réglage du régime moteur est déplacée, ou
lorsque le mode de fonctionnement à vitesse fixe est choisi, le
régime moteur de référence est aussi modifié. Ces modifications
causeraient un changement trop rapide du régime moteur. Afin
d’éviter cela, le taux de changement de la valeur de réglage du
régime moteur est limité par une fonction d’accélération
graduelle. Les courbes (% régime moteur par rapport au temps
écoulé) de cette fonction peuvent être réglées dans les paramètres.
Contrôle de charge
Le contrôle de charge empêche les moteurs principaux d’être
surchargés, selon la valeur de charge maximale permise pour les
conditions d’opérations actuelles.
Principe de fonctionnement
Le système de contrôle de charge régule la charge des moteurs
principaux en fonction de la charge maximale permise, calculée
par le système et une courbe est calculée avec la position du
télégraphe.
Lorsque la charge réelle des moteurs excède la valeur de charge
maximale permise (surcharge), le contrôle de charge force le
contrôle de CPH à réduire la position du CPH jusqu'à ce que la
valeur maximale soit atteinte.
Charge maximale permise des moteurs
La charge maximale permise est calculée comme la valeur
minimale des paramètres suivants :
réglages de la limite-chef;
limite du programme de démarrage;
limite de récupération d’air;
limite de puissance.
Si la fonction de surpassement de la limite est activée sur le
tableau de commande, la limite-chef et la limite du programme de
démarrage sont rendues inactives. Cela signifie que leur fonction
de limitants est désactivée.
La limite de récupération d’air (charge max. permise par rapport à
la pression d’air récupérée) et la limite de puissance (charge max.
permise par rapport au régime moteur) sont calculées à partir des
courbes de fonction (paramètres).
Contrôle de CPH

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
le système commande le pas de l’hélice par rapport au point de
réglage de la charge.
Contrôle automatique
lorsque le contrôle automatique du CPH est choisi, le CPH est
contrôlé par un système à distance. Lorsqu’un mode de contrôle
non automatique est choisi (p. ex. contrôle local ou contrôle
d’urgence du CPH) le système de contrôle à distance suit la
position réelle du CPH afin d’assurer une transition sans heurts
lors du retour au mode automatique.
Limitation de CPH
Le CPH de référence est limité à une valeur maximale lorsque des
conditions de ralentissement sont détectées par le système de
sécurité. Cela veut dire qu’aucune valeur de réglage supérieure de
CPH ne peut être obtenue autre que la valeur limite de CPH
(paramètre).
Le point de réglage du CPH est indépendant du CPH de référence
obtenue de la courbe de fonctions et il est forcé à zéro lorsqu'un
arrêt des moteurs principaux survient sur les deux moteurs.
Interférences du contrôle de charge
Lorsque le CPH de référence est plus élevé que le CPh réel, cela
causera une augmentation du CPH et, à cause de cette
augmentation, la charge des moteurs principaux augmentera
également. Toutefois, cette augmentation ne pourra pas entraîner
une surcharge des moteurs. Par conséquent, la fonction de
contrôle de charge (voir la section CONTRÔLE DE CHARGE)
peut bloquer l'augmentation du CPH ou même diminuer le CPH si
les moteurs sont surchargés.
Changement de taux de valeur de réglage
Lorsque la manette de manœuvre est déplacée, le CPH de
référence est modifié. Ces changements causeraient une
augmentation de charge trop rapide pour les moteurs principaux.
Par conséquent, le taux de changement de la valeur de réglage du
CPH (pour les boucles de commandes du CPH) est limité par une
fonction d’accélération graduelle. Les courbes (% CPH par
rapport au temps écoulé) de cette fonction peuvent être réglées
dans les paramètres.
Fonctions de contrôle d’urgence
Le système de contrôle à distance comprend un système de
contrôle d’urgence du CPH afin d’assurer le contrôle sécuritaire
lorsque le système informatique arrête de fonctionner (p. ex.
panne du processeur ou manque d’alimentation électrique).
Commandes de secours du CPH
Le système de commande de secours du CPH comprend des

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
boutons sur le tableau de commande qui permettent d’augmenter
ou de diminuer le CPH, de commander l’allumage des solénoïdes
des unités hydrauliques du CPH. Les commandes d'urgence du
CPH peuvent être activés à tout moment par un commutateur de
sélection qui se trouve sur le tableau de commande, peut importe
quel emplacement est aux commandes. Lorsque les commandes
d'urgence du CPH sont activées sur les deux tableaux de
commande, les commandes du pont sont désactivées et les
commandes sont transférées à la salle de commande des moteurs
(SCM). Lorsque les commandes de secours du CPH sont
sélectionnées, cela est indiqué sur les deux tableaux de
commande.
Matériel de contrôle de sécurité
Contrôleur programmable AC31
Approbation de type émise par les sociétés de classification
principales.
Modules de mise en tension et hors tension avec appareil de
mesure de ligne AC31
Communication avec le contrôleur principal de Modbus
communication.
Système de sécurité
un système complet de sécurité pour les moteurs principaux sera
livré comme système de contrôle distinct. Les caractéristiques du
système comprennent :
l’arrêt automatique
le ralentissement automatique par le système de contrôle à
distance
l’arrêt d’urgence
la surveillance de l’alimentation électrique, des senseurs et
de l’électro-aimant d’arrêt.
Fonctions de sécurité
Arrêt d’urgence
si un des interrupteurs d’arrêt d’urgence est activé sur un des
tableaux de commande, l’arrêt est effectué par le système de
sécurité. La désactivation de l’arrêt d’urgence réinitialise
automatiquement le processus d’arrêt.
Arrêt
si le contacteur d'un senseur d'arrêt se ferme, un avertissement
d’arrêt apparaîtra sur le tableau de commande. Il est possible de
reconnaître cet avertissement par la lumière clignotante et par le
signal sonore intermittent. Si la condition d’arrêt reste active après
un délai prédéterminé (paramètre), l’arrêt s’effectuera. À partir de
se moment, on ne peut réinitialiser l’arrêt qu’en utilisant

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
l’interrupteur de remise à zéro qui se trouve sur un des deux
tableaux de commande ou en annulant l’arrêt en utilisant
l’interrupteur de contournement. La réinitialisation ne peut être
exécutée qu’après que la condition d'arrêt soit disparue.
Ralentissement
si le contacteur d'un senseur de ralentissement se ferme, un
avertissement de ralentissement apparaîtra sur le tableau de
commande. Il est possible de reconnaître cet avertissement par la
lumière clignotante et par le signal sonore intermittent. Si la
condition de ralentissement reste active après un délai
prédéterminé (paramètre), le système de contrôle à distance
effectuera le ralentissement. Cela sera effectué en réduisant le
régime moteur ou le CPH, selon le mode d’opération. Si la
condition de ralentissement disparaît, le ralentissement se
réinitialisera automatiquement. Si la condition de ralentissement
persiste, il est possible d'annuler le ralentissement en appuyant sur
l'interrupteur de contournement.
Indication de canal
Les indications sur l'état de chaque canal peuvent être consultées
sur le tableau de la salle de commande des moteurs (SCM).
Surveillance
Les circuits suivants sont surveillés par le système informatique :
Alimentation électrique
Senseurs
Électro-aimant d’arrêt
Si le système informatique décèle une erreur dans l’un des circuits
surveillés, il activera une alarme.
Alimentation électrique
Le système de sécurité possède une redondance dans sa connexion
à l'alimentation électrique. Les deux entrées à l'alimentation
électrique sont surveillées.
Circuits de senseurs
Les circuits de senseurs sont surveillés pour détecter l’une des
défectuosités suivantes :
Boucle ouverte
Court-circuit de la boucle à 0 V ou au sol
Court-circuit dans la boucle
Pour obtenir la pleine gamme de détection des défectuosités, deux
résistances doivent en place dans la boîte à bornes de chaque
senseur, comme requis.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Électro-aimant d’arrêt
l’électrovanne d’arrêt reliée au système de sécurité est surveillée
pour déceler les problèmes suivants :
Boucle ouverte
Court-circuit dans la boucle
Court-circuit du fil positif à 0 V ou au sol.
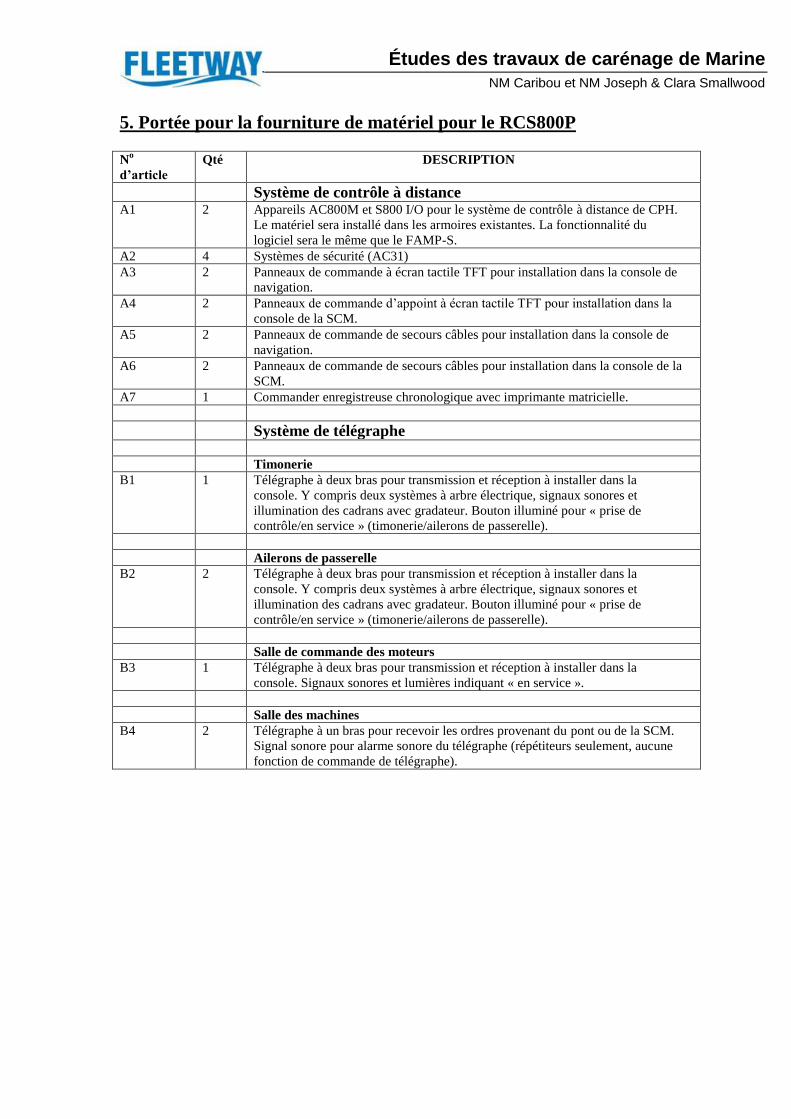
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
5. Portée pour la fourniture de matériel pour le RCS800P
No
d’article
Qté DESCRIPTION
Système de contrôle à distance A1 2 Appareils AC800M et S800 I/O pour le système de contrôle à distance de CPH.
Le matériel sera installé dans les armoires existantes. La fonctionnalité du
logiciel sera le même que le FAMP-S.
A2 4 Systèmes de sécurité (AC31)
A3 2 Panneaux de commande à écran tactile TFT pour installation dans la console de
navigation.
A4 2 Panneaux de commande d’appoint à écran tactile TFT pour installation dans la
console de la SCM.
A5 2 Panneaux de commande de secours câbles pour installation dans la console de
navigation.
A6 2 Panneaux de commande de secours câbles pour installation dans la console de la
SCM.
A7 1 Commander enregistreuse chronologique avec imprimante matricielle.
Système de télégraphe
Timonerie
B1 1 Télégraphe à deux bras pour transmission et réception à installer dans la
console. Y compris deux systèmes à arbre électrique, signaux sonores et
illumination des cadrans avec gradateur. Bouton illuminé pour « prise de
contrôle/en service » (timonerie/ailerons de passerelle).
Ailerons de passerelle
B2 2 Télégraphe à deux bras pour transmission et réception à installer dans la
console. Y compris deux systèmes à arbre électrique, signaux sonores et
illumination des cadrans avec gradateur. Bouton illuminé pour « prise de
contrôle/en service » (timonerie/ailerons de passerelle).
Salle de commande des moteurs
B3 1 Télégraphe à deux bras pour transmission et réception à installer dans la
console. Signaux sonores et lumières indiquant « en service ».
Salle des machines
B4 2 Télégraphe à un bras pour recevoir les ordres provenant du pont ou de la SCM.
Signal sonore pour alarme sonore du télégraphe (répétiteurs seulement, aucune
fonction de commande de télégraphe).

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
6. DEGO III, Système de régulateur numérique (pour Caribou et
Smallwood)
CONCEPT
Le système de contrôle de régulateur DEGO III, série QHFQ 100 est
basé sur une seule plate-forme matérielle; le logiciel couvre tous les
aspects des mécanismes maritimes et terrestres comme :
Propulsion à un moteur (vitesses : lente/moyenne/haute) ;
Propulsion à plusieurs moteurs ;
Contrôle du moteur du générateur.
PROGRAMMATION DU DEGO III
La recherche de la flexibilité a mené à la création d’un outil puissant de
mise en service fonctionnant sur Windows.
Les points saillants sont :
DEGO III aide aux travaux dans les plates-formes Windows
3.X/9X/NT.
La configuration peut se faire en ligne ou hors-ligne.
Il est possible de télécharger ou de téléverser des configurations.
Les rapports en format texte des réglages réels peuvent être
sauvegardés.
Les PID et les courbes de limites sont configurés à partir d’une
méthode de glisser-déplacer à 5 points.
Il est possible de ramener les réglages aux derniers réglages ou aux
réglages par défaut.
Oscilloscope inclus dans le programme ; les signaux d’allumage, de
mise hors tension et de contrôle peuvent être tracés.
Fonction de journal incluse, montre l’historique et le temps.
Manipulations analogiques et numériques de mise en tension et hors
tension (fonction/mise à l’échelle/essais).
Guide de mise en marche avec liste à faire et liste faite.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
CARACTÉRISTIQUES
Communes à toutes les applications :
Valeur moyenne de deux senseurs de vitesse et calculée.
Commande des actionneurs mis en application dans l’unité de
contrôle.
Configurations de vitesse sélectionnables pour signaux analogiques
ou inc./déc.
Affichage LCD, 4 lignes montrant le régime moteur, le carburant, le
mode de contrôle et les alarmes.
Contrôle manuel du carburant avec signaux inc./déc.
Régulateur PID de charge et de vitesse d’accord/adoptée avec
« I-limit ».
Suppresseur et surveillance de survitesse.
Application à un moteur :
Limites de puissance et de fumée.
Fonctions mode ralenties, réduction de la consommation de
carburant et entretien.
Application à plusieurs moteurs :
Limites de puissance et de fumée.
Fonction mode ralentie.
Maître-esclave ou régulation de partage de charge.
Programmes de chargement et de déchargement.
Réglage d'équilibrage de charge externe.
Application à un générateur :
Fonctionnement au ralenti.
Programmes de chargement et de déchargement.
Régulation de la vitesse, mode d’opération isochronique et à
contrôle de charge.
Réponse rapide aux changements de charge en raison du couplage
vers l’avant.
Synchronisation de barres omnibus séparées.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Optionnel :
Deuxième commande des actionneurs.
Système VIT avec réglages de qualité du carburant.
Système tachymétrique à canaux multiples.
Contrôle de lubrification des cylindres.
Blocage de régime moteur critique et alarme.
Contrôle de synchronisation de pompe à carburant.
Détection de ratés.
Contrôle du générateur d’arbre.
Contrôle de démarrage en douceur et d’embrayage.
Synchronisation de moteur et de l’hélice.
L’aide avancée de DEGO III est :
Conçue de manière ergonomique.
Conviviale, à cause des fonctions standards de Windows.
Explicite et elle possède une fonction d'Aide contextuelle.
Excellente pour aider à la mise en service et à la recherche de
défaillances.
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Dego III control unit Unité de commande Dego III
PID PID
Governors Régulateurs
Individual port master Commande maîtresse de port individuel
Starboard master Maître tribord
Fuel servo Servocommande à carburant
Actuators Vérins
Clutches Embrayage
Gearbox Boîte de vitesses

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
7. Ensemble des articles fournis pour le système DEGO III Articles Qté DESCRIPTION No
C1 4 QHFQ 110, y compris le logiciel de propulsion de base
C2 2 Option de synchronisation de l’arbre du logiciel C3 2 Option de chargement/déchargement du logiciel C3 1 Logiciel d’aide DEGO III et câble de communication
(pc ou portable non compris) Manuels D1 3 3 ensembles de manuels de produits avec chaque
livraison de matériel Les vérins existants seront réutilisés.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
8. Systèmes d'automatisation 800xA (J & C Smallwood) 8.1. m/v. J & C Smallwood Études des travaux de carénage de Marine Atlantic.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
8.2. Option 1 :
Remplacement du système Alsy 8 : Les boîtiers existants du Alsy 8 seront réutilisés. Seul les commandes d’entrée-sortie S800 seront installés dans les
boîtiers. Les processeurs redondants AC800M du système d’information seront
utilisés dans le système d’alarme. Ensemble des articles fournis pour le système d’alarme :
Articles Qté DESCRIPTION No Unités d’entrée-sortie S800 Unités d'entrée numérique
Unités d'entrée analogique du PT100
Unités d'entrée analogique
des thermocouples Unités de sortie numérique des klaxons et des voyants d’alarme, etc. Poste de commande de l’opérateur (ECR) Moniteur TFT de 18 po Blocs d’alimentation Panneaux de cabine Tableau de la passerelle Imprimante de copies papier Survol des images, afin d’afficher tous les
renseignements requis sur les écrans Licence ABB
Nota : Ces quantités seront peut-être insuffisantes et devraient être confirmées plus tard au cours de la conception.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
8.3. Option 2 :
Intégration des boutons-poussoirs démarrer/arrêter, des sélecteurs et des inverseurs, ainsi que des voyants indicateurs de position.
Ensemble des articles fournis pour l’option 2 :
Articles Qté DESCRIPTION No
AC800M redondant Processeur redondant PM861K02 Unités d’entrée-sortie S800 Unités d'entrée numérique Unités de sortie numérique Blocs d’alimentation Survol des images, afin d’afficher tous les
renseignements requis sur les écrans Licence ABB 8.4. Option 3 :
Intégration du système de commande des ballasts. Ensemble des articles fournis pour l’option 3 : Articles Qté DESCRIPTION No Unités d’entrée-sortie S800 Unités d'entrée numérique Unités de sortie numérique Blocs d’alimentation Survol des images, afin d’afficher tous les
renseignements requis sur les écrans Licence ABB Nota : Les options 2 et 3 seront mises en œuvre dans un même ensemble
de commandes AC800M (redondant).

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
9. Systèmes d'automatisation 800xA (Caribou) Ce schéma est préparé par Fleetway

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
9.1. Option 1 : Remplacement du système Alsy 8 : Les boîtiers existants du Alsy 8 seront réutilisés. Seules les commandes d’entrée-sortie S800 seront installées dans les
boîtiers. Ensemble des articles fournis pour le système d’alarme :
Articles Qté DESCRIPTION No AC800M Processeur redondant PM861K02 (2x AC800M) Blocs d’alimentation et unité de tension Lieux de travail des opérateurs Postes de commande des opérateurs sous licence ABB Moniteur TFT de 18,1 po Trousses de marin Unités d’entrée/sortie télécommandées S800 Unités d'entrée numérique Unités d'entrée analogique du PT100 Unités d'entrée analogique des thermocouples Unités de sortie numérique des klaxons et des voyants d’alarme, etc. Unités S800 pour la commande des ventilateurs (y
compris la vue d’ensemble des images sur les écrans)
Blocs d’alimentation Panneaux de cabine Tableau de la passerelle Imprimante de copies papier Survol des images, afin d’afficher tous les
Nota : Ces quantités seront peut-être insuffisantes et devraient être confirmées plus tard au cours de la conception.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
renseignements requis sur les écrans Licence ABB 9.2. Option 2 :
Intégration des boutons-poussoirs démarrer/arrêter, des sélecteurs et
des inverseurs, ainsi que des voyants indicateurs de position. Ensemble des articles fournis pour l’option 2 :
Articles Qté DESCRIPTION No
AC800M redondant Processeur redondant PM861K02 (2x AC800M) Unités d’entrée-sortie S800 Unités d'entrée numérique Unités de sortie numérique Blocs d’alimentation Survol des images, afin d’afficher tous les
renseignements requis sur les écrans Licence ABB 9.3. Option 3 :
Intégration du système de commande des ballasts. Ensemble des articles fournis pour l’option 3 :
Articles Qté DESCRIPTION No Unités d’entrée-sortie S800 Unités d'entrée numérique Unités de sortie numérique Blocs d’alimentation Survol des images, afin d’afficher tous les
renseignements requis sur les écrans Licence ABB

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
ANNEXE B
PROPOSITION DE KONGSBERG MARITIME

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Proposition
04Q281-CAN Fleetway 1/DC/04/ rev2DataChief C20
NM Cariboo et NM Joseph & Clara Smallwood
Marine Atlantic
le 13 décembre 2004

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Table des matières
1 PRIX ET CONDITIONS ...............................................................................
2 INTRODUCTION ......................................................................................... 2.1 Système de surveillance d’alarme et commande ......................................... 2.2 Approbation des catégories et société de classification ...............................
3 PORTÉE DES APPROVISIONNEMENTS – MATÉRIEL ............................ 3.1 Matériel dans la salle de commande des moteurs ....................................... 3.2 Matériel à accommodation ........................................................................... 3.5 Matériel pour les systèmes de la salle des machines ..................................
3.5.1 Système d’alarme et de surveillance .................................................. 3.6 Option 1 .......................................................................................................
3.6.1 SCD additionnelle .............................................................................. 3.6.2 Matériel du système d’appel et d’alarme supplémentaire ................. 3.6.3 Système d’alarme de sécurité de l’Ingénieur ....................................
3.7 Option 2................................................................................................... Interface des boutons-poussoirs de marche/arrêt .............................................. 3.8 Option 3................................................................................................... Vannes et pompes ............................................................................................. 3.9 Matériel supplémentaire ..........................................................................
3.9.1 Pièces de rechange .......................................................................... 3.9.2 Augmentation de la demande de matériel en raison du niveau
élevé du système de distribution ..................................................... 3.10 Alimentation électrique ............................................................................
3.10.1 Alimentation électrique et détection de défauts de mise à la terre ..................................................................................................
4 Portée des approvisionnements – Fonctions ......................................... 4.1 Fonctions d’alarme et de contrôle ..........................................................
4.1.1 Poste de l’opérateur à distance (ROS) ............................................. 4.1.2 Journaux de bord.............................................................................. 4.1.3 Système d’appel et d’alarme supplémentaire, option ....................... 4.1.4 Système d’alarme de sécurité de l’Ingénieur (système
d’alarme « homme mort ») ............................................................... 4.1.5 Système de traitement réparti (DPU)................................................
5 SCOPE OF SUPPLY VOYAGE DATA RECORDER .................................. 5.1 System hardware .................................................................................... 5.2 System functions .....................................................................................
6 PORTÉE DES APPROVISIONNEMENTS – SERVICES DU PROJET ...... 6.1 Gestion du projet ..................................................................................... 6.2 Essai d'acceptation en usine ................................................................... 6.3 Mise en service/mise en marche ............................................................. 6.4 Aide supplémentaire en matière de mise en service ............................... 6.5 Documentation ........................................................................................ 6.6 Formation ................................................................................................ 6.7 Plan de projet ..........................................................................................
7 CONDITIONS GÉNÉRALES DE LA VENTE ..............................................

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
7.1 Conditions générales .............................................................................. 7.2 Permis d’exportation émis par les autorités norvégiennes ...................... 7.3 Accusé de réception de la commande .................................................... 7.4 Conditions de livraison ............................................................................ 7.5 Facture, paiement et réserve de propriété .............................................. 7.6 Installation ............................................................................................... 7.7 Garanties ................................................................................................ 7.8 Documentation et spécification technique ............................................... 7.9 Force majeure ......................................................................................... 7.10 Interdiction de falsifier et de modifier ....................................................... 7.11 Résolution de conflits, loi applicable .......................................................
8 CONDITIONS GÉNÉRALES POUR L’INGÉNIERIE ET LA MISE EN SERVICE ....................................................................................................
8.1 INGÉNIERIE ........................................................................................... 8.2 Mise en service ....................................................................................... 8.3 Conditions de la mise en service ............................................................. 8.4 Délai d’attente/temps supplémentaire pour la mise en service .............. 8.5 Dommages causés aux pièces et à l’équipement ................................... 8.6 Rapport de mise en service ....................................................................

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
1 PRIX ET CONDITIONS
Référence :
Prix : Alarme et surveillance $ CAD 119 000 /navire
Alarme et surveillance+ $ CAD
option 1 $ CAD 165 600 /navire
Caribou additionnel $ CAD 26 800 /navire
Alarme et surveillance+ $ CAD 220 600 /navire
option 1 et 2
Alarme et surveillance+ $ CAD 238 200 /navire
option 1, 2 et 3
Article 5 appareil VDR $ CAD 79 700 /navire
Option : Appareil S-VDR simplifié 59 700
Paiement : 30 % à l’attribution du contrat
60 % à la livraison du matériel à Kronsberg Maritime
10 % à la livraison du matériel au navire
Délai de livraison : Au moins 3 mois après de la conception définitive, voir Plan de
projet
Conditions :
Frais de douane : L’acheteur est responsable de tous les frais comme les droits
d’importation et les taxes prélevées sur le matériel à son entrée
dans son pays.
Conditions de EXW Horten Norway (Incoterms 2000)
livraison :
Validité : 3 mois
Halifax, le 13 décembre 2004

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
2 INTRODUCTION Le système offert est un système de surveillance et de commande « DataChief C20 »,
selon le diagramme du système.
2.1 Système de surveillance d’alarme et commande
Le « DataChief C20 » de Kongsberg Maritime est un système de surveillance d’alarme
et commande intégré basé sur un microprocesseur de nouvelle génération. Le système
peut être installé partout sur le navire à l’aide d’un bus de terrain et redondant et d’un
réseau local redondant pour interconnecter les différentes unités de calcul distribué
(UCD) doit être placé dans la salle des machines, dans le tableau de contrôle, etc., pour
traiter les E/S des capteurs de même que les fonctions de commande et d’alarme.
La capacité de distribution de ce système le rend avantageux pour les chantiers qui
déploient les UCD à des positions près des systèmes à contrôler, dans les boîtiers de
pompe de tierces parties, des tableaux de commande etc. Par conséquent, il se pourrait
qu’on ne puisse pas utilise 100% des E/S des UCD, ce qui entraînerait un besoin pour
plus d’UCD que nécessaire.
L’expérience montre, les coûts de câblage et d’installation sont sensiblement réduits
par ce procédé, compensant fortement l’augmentation des coûts des UCD.
L’interface opérateur principal est commandée par des stations de commande à
distance, où des graphiques de haute résolution représentent les affichages et les
panneaux opérateurs fonctionnels. L’interface opérateur secondaire peut être
commandée à partir de Station de commande locale ou de Station de commande à mi-
distance, qui est utilisée pour inspecter et régler les paramètres de processus et les
variables. D’autres interfaces, comme des interfaces Ethenet ou de bus de terrain sont
possibles.
Le DataChief C20 est conçu pour gérer la plupart des systèmes techniques à bord du
navire. Donc, il a des dispositions pour plusieurs interfaces de matériel de tierces
parties, comme l’alarme-incendie, le calcul des charges, etc. Actuellement, des canaux
séries à haute ou basse capacité ont des interfaces semblables. D’autres interfaces
comme le réseau local ou bus de terrain sont possibles.
Le concept modulaire du « Datachief C20 » permet une flexibilité du système
architectural, couvrant une gamme allant de systèmes d’alarme peu complexes à des
systèmes d’alarme et surveillance hautement intégrés avec des commandes de
procédés avancés.
2.2 Approbation des catégories et société de classification
Le DataChief C20 respecte les exigences de l’OMI et des sociétés de classification. Il
est approuvé par l’ABS, le LRS, le GL, le RINA, le BV, le KRS, le CCS, le PRS,
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
RMRS, le NK et le DNV et se conforme aux règlements pour les systèmes
informatisés à bord des navires, de même que l’annotation en ce qui concerne les
systèmes d’automatisation et les systèmes informatiques intégrés.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
3 PORTÉE DES APPROVISIONNEMENTS – MATÉRIEL Les unités du système sont installées dans différents emplacements dans le navire,
selon les indications du présent chapitre. La proposition est basée sur un nombre
d’UCD pour traiter un nombre spécifique d’E/S, avec 80-100 % d’utilisation de
canaux.
3.1 Matériel dans la salle de commande des moteurs
1 Station de commande à distance (SCD), chacune
comprenant :
écran TFT de 17 po
Panneau de commande à monter dans le
bureau de la console, y compris : une
alarme d’extension et système d’appel
pour le mécanicien du navire.
PC approuvé avec :
- logiciel Datachief C20
- Deux (2) ports Ehernet avec
logiciel
- Interface CAN pour appel à la
patrouille
- Interface CAN pour CDU
1 Imprimante d’alarme et de registre
Matrice de points avec trousse couleur
Câble de 5 m#
1 Excitateur de relais de CDU RDo-16 pour :
Gyrophare
Klaxon
Ralentissement/fermeture
Connexions des interface
1 Interface Ethernet

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
3.2 Matériel à accommodation
1 FleetMaster, comprenant chacun :
écran TFT de 17 po
PC approuvé avec Microsoft Windows :
- l’application
- Deux (2) ports Ehernet avec
pilotes
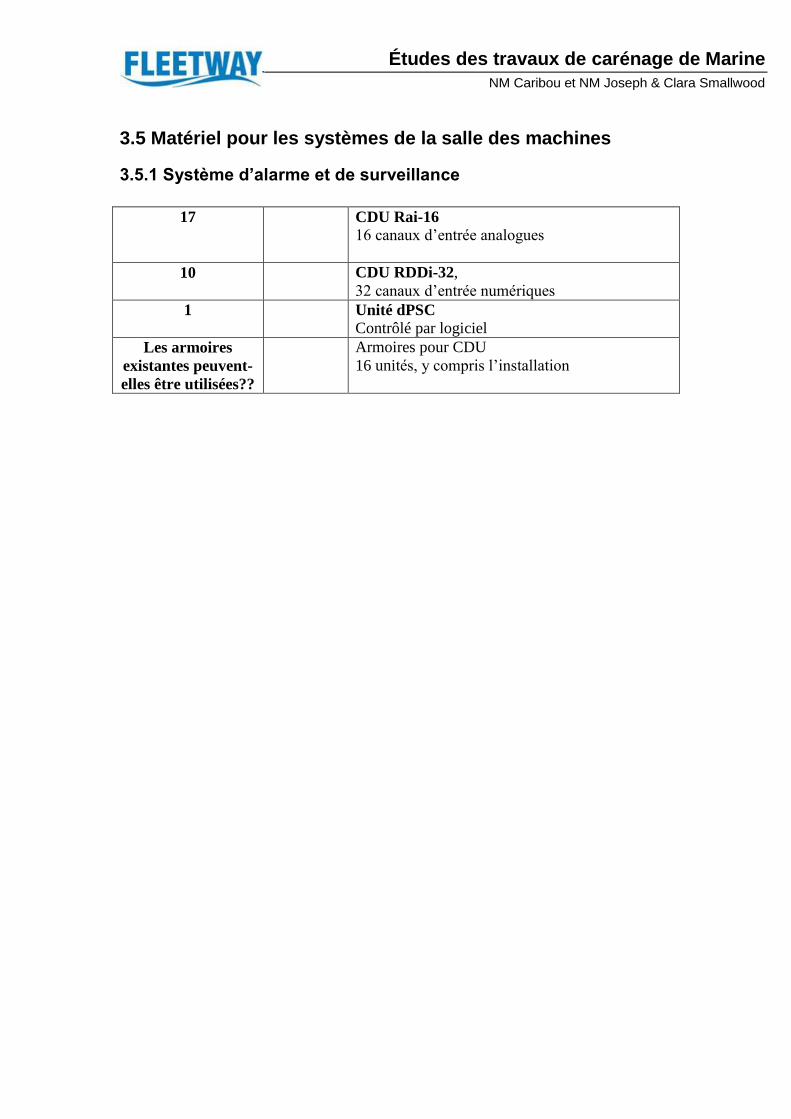
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
3.5 Matériel pour les systèmes de la salle des machines
3.5.1 Système d’alarme et de surveillance
17 CDU Rai-16
16 canaux d’entrée analogues
10 CDU RDDi-32,
32 canaux d’entrée numériques
1 Unité dPSC
Contrôlé par logiciel
Les armoires
existantes peuvent-
elles être utilisées??
Armoires pour CDU
16 unités, y compris l’installation

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Sommaire des E/S
550 Nombre total d’entrées et de sorties câblées
Analogues : 225 canaux
Numériques : 325 canaux
11 Entrées/sorties câblées de libres (p.ex.
configuration SW)

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
3.6 Option 1
3.6.1 SCD additionnelle
1 Station de commande à distance (SCD), chacune
comprenant :
écran TFT de 17 po
Panneau de commande à monter dans le
bureau de la console, y compris : une
alarme d’extension et système d’appel
pour le mécanicien du navire.
PC approuvé avec :
- logiciel Datachief C20
- Deux (2) ports Ehernet avec
logiciel
- Interface CAN pour appel à la
patrouille
- Interface CAN pour CDU
220/220 VCA
1 ASI MGE Pulsar Evolution 800 VA maritime
Catégorie approuvée
E/S additionnelles pour NV Smallwood
2 CDU RDi-32,
32 canaux d’entrée numériques
E/S additionnelles pour NV Smallwood
4 CDU RDi-32,
32 canaux d’entrée numériques
3 CDU Rai-16
16 canaux d’entrée analogues
3 CDU Rdo-16
16 canaux d’entrée analogues

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
SCD additionnelle, pont
1 Station de commande à distance (SCD), chacune
comprenant :
écran TFT de 17 po
Panneau de commande à monter dans le
bureau de la console, y compris : une
alarme d’extension et système d’appel
pour le mécanicien du navire.
PC approuvé avec :
- logiciel Datachief C20
- Deux (2) ports Ehernet avec
logiciel
- Interface CAN pour appel à la
patrouille
- Interface CAN pour CDU
220/220 VCA
1 ASI MGE Pulsar Evolution 800 VA maritime
Catégorie approuvée

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
3.6.2 Matériel du système d’appel et d’alarme supplémentaire
Les panneaux d’alarme combinés se trouvent sur les postes de contrôle suivants :
Sélection de service, intégré dans le
OCP 8810 situé dans la salle de
commande des machines
1 Système de veille du pont,
comprenant 16 groupes dans la
timonerie
6 Système de veille de la cabine,
comprenant 16 groupes dans les
cabines des ingénieurs
1 Système de veille de la cabine,
comprenant 16 groupes dans le
mess/salle commune
3.6.3 Système d’alarme de sécurité de l’Ingénieur
(Système d’alarme « homme mort »)
Le système d’alarme « homme mort » est un système autonome utilisé pour assurer la
sécurité de l’ingénieur en service.
1 Minuterie et entrées-sorties (E-S)
comprises dans le système de
traitement réparti (DPU), situées
dans la salle de commande des
machines
1 Boîtier de marche/arrêt, situé dans la
salle de commande des machines
3 Boîtier de réarmement, situé dans la
salle des machines
3.7 Option 2
Interface des boutons-poussoirs de marche/arrêt
1 Contrôleur de segment à traitement
parallèle, logique, LOGICIEL
10 DPU RIO-c2,
8 canaux d’entrée numérique et 8
canaux de sortie numérique chacun
7 DPU RDo-16, 16 canaux de sortie chacun
????? Armoire des DPU,
16, y compris l’installation
Tableau à schéma personnalisé
2 Schéma des machines
3.8 Option 3
Vannes et pompes
4 DPU RDi-32,
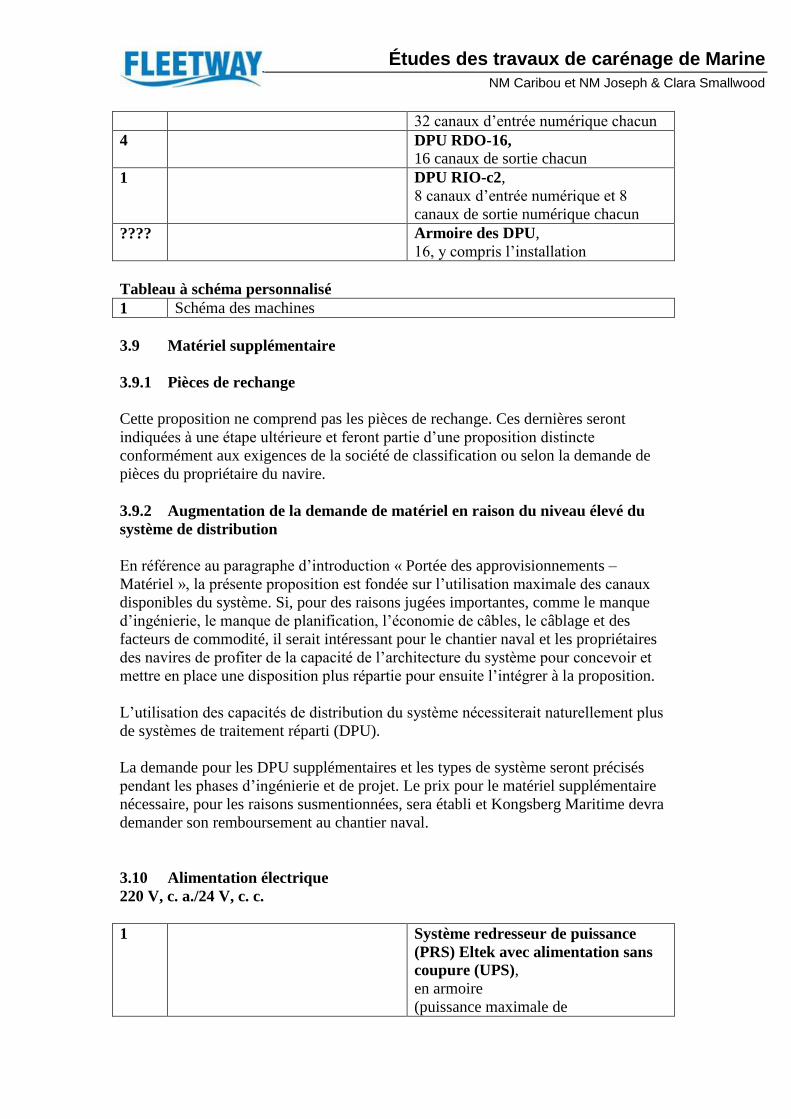
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
32 canaux d’entrée numérique chacun
4 DPU RDO-16, 16 canaux de sortie chacun
1 DPU RIO-c2,
8 canaux d’entrée numérique et 8
canaux de sortie numérique chacun
???? Armoire des DPU,
16, y compris l’installation
Tableau à schéma personnalisé
1 Schéma des machines
3.9 Matériel supplémentaire
3.9.1 Pièces de rechange
Cette proposition ne comprend pas les pièces de rechange. Ces dernières seront
indiquées à une étape ultérieure et feront partie d’une proposition distincte
conformément aux exigences de la société de classification ou selon la demande de
pièces du propriétaire du navire.
3.9.2 Augmentation de la demande de matériel en raison du niveau élevé du
système de distribution
En référence au paragraphe d’introduction « Portée des approvisionnements –
Matériel », la présente proposition est fondée sur l’utilisation maximale des canaux
disponibles du système. Si, pour des raisons jugées importantes, comme le manque
d’ingénierie, le manque de planification, l’économie de câbles, le câblage et des
facteurs de commodité, il serait intéressant pour le chantier naval et les propriétaires
des navires de profiter de la capacité de l’architecture du système pour concevoir et
mettre en place une disposition plus répartie pour ensuite l’intégrer à la proposition.
L’utilisation des capacités de distribution du système nécessiterait naturellement plus
de systèmes de traitement réparti (DPU).
La demande pour les DPU supplémentaires et les types de système seront précisés
pendant les phases d’ingénierie et de projet. Le prix pour le matériel supplémentaire
nécessaire, pour les raisons susmentionnées, sera établi et Kongsberg Maritime devra
demander son remboursement au chantier naval.
3.10 Alimentation électrique
220 V, c. a./24 V, c. c.
1 Système redresseur de puissance
(PRS) Eltek avec alimentation sans
coupure (UPS),
en armoire
(puissance maximale de
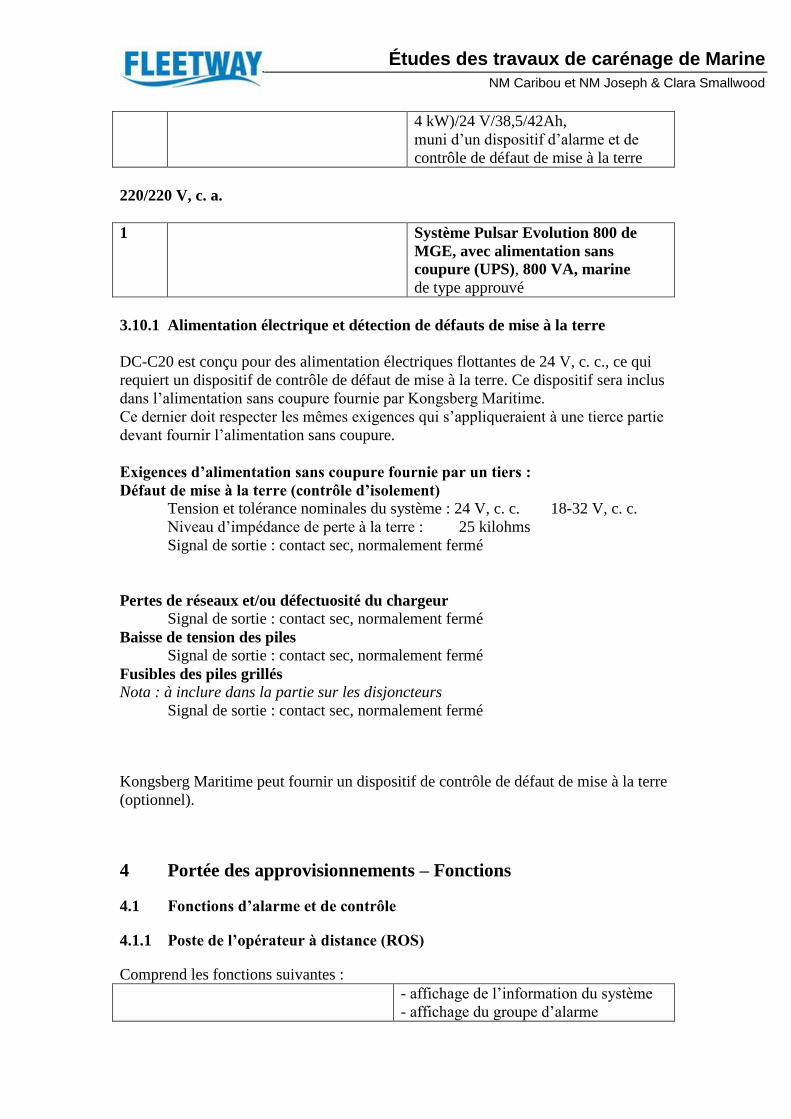
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
4 kW)/24 V/38,5/42Ah,
muni d’un dispositif d’alarme et de
contrôle de défaut de mise à la terre
220/220 V, c. a.
1 Système Pulsar Evolution 800 de
MGE, avec alimentation sans
coupure (UPS), 800 VA, marine
de type approuvé
3.10.1 Alimentation électrique et détection de défauts de mise à la terre
DC-C20 est conçu pour des alimentation électriques flottantes de 24 V, c. c., ce qui
requiert un dispositif de contrôle de défaut de mise à la terre. Ce dispositif sera inclus
dans l’alimentation sans coupure fournie par Kongsberg Maritime.
Ce dernier doit respecter les mêmes exigences qui s’appliqueraient à une tierce partie
devant fournir l’alimentation sans coupure.
Exigences d’alimentation sans coupure fournie par un tiers :
Défaut de mise à la terre (contrôle d’isolement)
Tension et tolérance nominales du système : 24 V, c. c. 18-32 V, c. c.
Niveau d’impédance de perte à la terre : 25 kilohms
Signal de sortie : contact sec, normalement fermé
Pertes de réseaux et/ou défectuosité du chargeur
Signal de sortie : contact sec, normalement fermé
Baisse de tension des piles
Signal de sortie : contact sec, normalement fermé
Fusibles des piles grillés
Nota : à inclure dans la partie sur les disjoncteurs
Signal de sortie : contact sec, normalement fermé
Kongsberg Maritime peut fournir un dispositif de contrôle de défaut de mise à la terre
(optionnel).
4 Portée des approvisionnements – Fonctions
4.1 Fonctions d’alarme et de contrôle
4.1.1 Poste de l’opérateur à distance (ROS)
Comprend les fonctions suivantes :
- affichage de l’information du système
- affichage du groupe d’alarme

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
- affichage du sommaire des alarmes
- affichage de l’historique des alarmes
- affichage de points sélectionnés
- affichage de tendances sélectionnées
- affichage de l’imprimante à barres
- affichage des détails d’étiquette
- affichage de contrôle de déviation
d’échappement
- indication/détection d’alarme
- indication/fonctions d’interruption
- programmation de la date et de l’heure
- réglage des niveaux d’alarme et des
retards
- autodiagnostic
- reconnaissance d’alarme
- répétition d’alarme
- Offscan
Tableau à schéma personnalisé
4 Schéma du système des machines
Options
- réglage de l’intensité lumineuse de
l’écran (VDU) du pont
- affichage des écarts de température des
coussinets de cylindres
- affichage des compteurs
- redémarrage et réglage des compteurs
- alarme de détection/d’indication de
gradients
- programmation de la date et de l’heure
locale et celles du système
- bouton-poussoir d’arrêt des alarmes des
réservoirs
4.1.2 Journaux de bord
Les fonctions de rapports suivantes sont disponibles par le biais du poste d’opérateur à
distance (ROS) :
- rapport d’alarme
- rapport du mode automatique
- rapport de l’historique des alarmes
- rapport du sommaire des alarmes
- rapport des groupes
- rapport des points sélectionnés
- rapport des points suspendus
- rapport complet
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Options
- rapport des compteurs
- rapport d’événements
- rapport de douze heures
- rapport personnalisé
- rapport Offscan
- rapport de manœuvre
4.1.3 Système d’appel et d’alarme supplémentaire, option
Comprend les fonctions suivantes :
- sélection de machinerie surveillée/non
surveillée
- sélection d’un ingénieur en service
- extension des alarmes dans 16 groupes
- appeler l’ingénieur en service/appeler
tous les ingénieurs
- 1ère
et 2ème
répétition d’alarme avec
retard correspondant aux règles de la
société de classification
- essai des voyants et autodiagnostic
Options
- sortie, pour activer le relais, sortie pour
prolonger l’avertisseur
- fonction d’interruption de l’avertisseur
- sélection d’officiers EN SERVICE
lorsque la salle des machines est sans
surveillance
- carte d’alarme incendie avec
alimentation électrique distincte
4.1.4 Système d’alarme de sécurité de l’Ingénieur (système d’alarme « homme
mort »)
Comprend les fonctions suivantes :
- alarme de préavertissement pour la salle
de commande des machines/la salle des
machines
- alarme de sécurité des ingénieurs sur le
pont
4.1.5 Système de traitement réparti (DPU)
Comprend les fonctions suivantes :
- interface des signaux
- traitement des signaux
- détection d’alarme et d’événement
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
- repères temporels
- tendance à court termes
- autocontrôle intégré (BIST)
- indicateurs locaux de l’état du DPU
- interface du double réseau CAN
6 PORTÉE DES APPROVISIONNEMENTS – SERVICES DU
PROJET
6.1 Gestion du projet
À la signature du contrat, Kongsberg Maritime devra désigner un gestionnaire de
projet qui sera responsable de l’administration et de la communication quotidiennes
avec le client et ce, jusqu’à la livraison et l’installation du système prescrit dans la
proposition.
6.2 Essai d'acceptation en usine
Il incombe au gestionnaire de projet de soumettre à la société de classification les
documents requis et de préparer la procédure d’essai d’acceptation en usine
conformément au programme d’assurance de la qualité de Kongsberg Maritime.
La présente proposition comprend les dépenses associées, aux fins d’approbation
d’une des sociétés susmentionnées, aux documents de classification, aux frais de
classification et aux frais de déplacement pour les essais d’acceptation en usine.
6.3 Mise en service/mise en marche
Non compris.
6.4 Aide supplémentaire en matière de mise en service
L’aide à la mise en service, à l’essai à quai et à l’essai en mer requise, en plus des
jours spécifiés dans la présente proposition, doit faire l’objet d’une demande écrite par
le chantier naval. Cette aide supplémentaire sera assujetti aux tarifs courants actuels.
6.5 Documentation
Voir le plan de projet ci-dessous.
6.6 Formation
La formation du personnel du chantier naval et de l’équipage du propriétaire du navire
peut leur être donnée en même temps, sur demande, au centre de formation Kongsberg
Maritime.
6.7 Plan de projet
Avant le gel de la conception
Document Nbre
d’exemplaires
Responsable Date Échéancier
Accusé
réception de la
commande
1, la copie
originale
KM 3 semaines à
partir de la
date de la
commande

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Détails de
l’installation et
du montage
3 KM 4 semaines à
partir de la
date de la
commande
Commentaires
ou approbation
de ce qui
précède
1, la copie
originale
Chantier naval 3 semaines
après la
soumission des
documents
Liste
d’instruments
avec
attribution de
module d’e-s
Télécopieur ou
courriel
Chantier naval 3 mois avant la
livraison
Croquis des
schéma
personnalisés
(le cas
échéant)
1 Chantier naval 3 mois avant la
livraison
Après le gel de la conception
Document Nbre
d’exemplaires
Responsable Date Commentaires
Les documents
d’approbation
comprennent :
- configuration
du matériel
- liste des
instruments, y
compris les
connexions du
capteur
- tableaux de
schémas (le
cas échéant)
- manuel
d’utilisateur
4 KM 1 mois après
réception de la
liste
d’instruments
et des schémas
Approbation
écrite des
documents
1, la copie
originale
Chantier naval 1 mois après
réception des
documents à
approuver
Essai
d’acceptation
en usine
1, la copie
originale
KM 2 semaines
avant la
livraison
Livraison du
matériel
Télécopieur ou
courriel
KM Au moins 3
mois à partir
du gel de la
conception
Documents 4 KM 2 semaines

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
finaux après la mise
en service

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
7 CONDITIONS GÉNÉRALES DE LA VENTE
7.1 Conditions générales
Les conditions standard de KONGSBERG MARITIME (KM) se basent sur le document « Conditions générales pour la fourniture de produits mécaniques, électriques et électroniques » préparé par ORGALIME, à Bruxelles, en octobre 1992.
7.2 Permis d’exportation émis par les autorités norvégiennes
La livraison doit être conditionnelle à la remise d’un permis d’exportation accordé par le ministère des affaires étrangères de la Norvège. À défaut d’obtenir le permis en question, l’Acheteur ne pourra réclamer des dommages directs ou indirects au Vendeur.
7.3 Accusé de réception de la commande
Toute commande doit faire l’objet d’une confirmation de commande écrite du Vendeur, laquelle doit être signée par le personnel autorisé de l’Acheteur.
7.4 Conditions de livraison
4.1 En l’absence de conditions spéciales de livraison spécifiées dans la confirmation de la commande, les biens doivent être livrés FCA à KM (Incotermes 2000) en Norvège à la date convenue. 4.2 Toute commande fait l’objet d’un accord entre l’Acheteur et le Vendeur pour la mise en place d’un « Plan de projet », lequel régit l’échange de documents techniques et de renseignements entre les parties. 4.3 L’Acheteur et le Vendeur doivent s’entendre sur un « gel de la conception », lequel constitue la spécification technique finale du produit. Si l’Acheteur ne respecte pas cette exigence, le Vendeur se verra libérer de son obligation de se conformer au délai de livraison convenu et il aura le droit de demander à l’Acheteur une compensation pour les dommages directs occasionnés. 4.4 Toute modification apportée au délai de livraison convenu doit être soumise à une attente entre les parties et cette entente doit régir les conditions du contrat. 4.5 Tous les frais ou toute dépense engagés par le Vendeur pour une approbation et/ou une inspection requise par l’Acheteur, son représentant, les autorités ou les sociétés de classification doivent être payés par l’Acheteur, sauf si une autre entente est convenue dans le contrat.
7.5 Facture, paiement et réserve de propriété
5.1 En l’absence d’une condition spéciale convenue, le paiement doit être garanti par une lettre de crédit confirmée et irrévocable payable 30 jours après la présentation de documents de transport à une banque norvégienne. 5.2 Dans le cas d’un accord de paiement différé sans lettre de crédit ou autre assurance de la part de KM, les clauses suivantes s’appliquent : Le transfert de paiement doit être effectué directement dans le compte

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
bancaire précisé par KM par le biais de SWIFT. 5.3 Si le Vendeur vit des changements majeurs au niveau de ses finances, KM est en droit d’exiger un paiement immédiat ou anticipé et/ou une sûreté dans un délai prescrit. Si le paiement ou la sûreté n’est pas présenté dans le délai prescrit, KM est en droit d’annuler l’accord de vente et de faire transférer les biens dans un lieu de son choix et à sa convenance. 5.4 Si KM se prévaut de son droit de réserve de propriété en raison d’un défaut de paiement, l’Acheteur doit immédiatement cesser d’utiliser, de mettre sur le marché, de vendre, de livrer et d’installer les biens. KM est en droit de récupérer les biens sur les lieux du Vendeur et ce dernier ne peut l’en empêcher. 5.5 L’Acheteur doit informer KM avant la livraison si les lois régissant l’emplacement de l’Acheteur ou l’emplacement d’entreposage des biens ne permettent pas, ou rendent exécutoire, la réserve de propriété. 5.6 Outre la réserve de propriété, KM peut demander, à tout moment avant la livraison, une garantie inconditionnelle et irrévocable d’une banque reconnue de réputation internationale ou une garantie identique d’une société affiliée acceptée par KM. La formulation de la lettre est sujette à l’approbation de KM. 5.7 Dans le cas d’un retard de paiement, les clauses suivantes s’appliquent : L’Acheteur doit payer un intérêt pour retard de paiement de 0,1 % par jour sur le montant dû à partir de la date de paiement prévue. 5.8 Si le client retarde la livraison convenue de plus de 20 jours, KM est en droit de charger une compensation de 0,1 % du montant du contrat pour chaque jour en dépassement de la date convenue jusqu’à un maximum de 10 % de la valeur totale du contrat. Si le client retarde la livraison convenue de plus de 120 jours, KM est en droit de résilier le contrat et de charger une indemnité de résiliation qui reflète les coûts actuels.
7.6 Installation
6.1 Tout équipement commandé doit être installé par l’Acheteur ou son représentant, sauf si une autre entente est convenue dans le contrat. 6.2 Le Vendeur est responsable de la livraison des dessins et instructions d’installation et le Vendeur est en droit d’inspecter l’installation avant ou pendant la mise en service des biens. 6.3 Des conditions additionnelles s’appliquent si KM est en charge de l’installation des biens.
7.7 Garanties
7.1 KM garantit que les biens sont conformes au contrat de vente et qu’ils sont exempts de défectuosités au niveau des matériaux et de l’exécution des travaux pour un usage normal et adéquat pendant la période de garantie, conformément aux clauses suivantes : 7.2 L’Acheteur doit inspecter les biens dès leur réception. Dans le cas de dommages causés lors du transport, par une mauvaise livraison ou pour tout autre défaut visible, l’Acheteur doit informer KM par télécopieur dans les 7 jours de la réception des biens à l’emplacement convenu. Aucune réclamation pour défectuosité ne peut être formulée après 7 jours, à
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
l’exception de vices cachés par KM. 7.3 KM est responsable des vices cachés pour les périodes de garantie suivantes : Biens : Douze (12) mois après la mise en service des biens ou 12 mois à partir de la date du certificat d’acceptation, mais avec une période limite de 24 mois après la date de livraison à l’Acheteur. Biens réparés : Six (6) mois à partir de la date de réparation. 7.4 Dans le cas d’un défaut, l’Acheteur doit immédiatement informer KM. L’Acheteur doit présenter une réclamation par écrit dès que possible au plus 30 jours à partir de la date où le défaut est apparu et il doit présenter des preuves à KM dudit défaut. Si l’Acheteur n’informe pas KM ou ne présente pas de réclamation dans la période prescrite, il perd son droit de présenter quelque réclamation que ce soit pour le défaut en question. 7.5 À la demande de KM, l’Acheteur doit retourner les biens défectueux dès que possible au plus tard 120 jours après la demande déposée par KM. Les produits défectueux doivent être réparés ou remplacés au choix de KM pour le compte de KM en prenant en considération la nécessité de l’Acheteur de trouver une solution rapide. Les coûts liés au transport doivent être assumés par KM lorsque les biens défectueux sont couverts par la garantie. 7.6 Pendant et après la période de garantie, l’Acheteur peut exiger la réparation ou le remplacement du système ou une nouvelle installation chez les clients contre le paiement des coûts liés aux déplacements, à l’hébergement, aux allocations et au temps nécessaire pour le déplacement/passage de KM à moins d’avis contraire dans le contrat. Si les réparations ou le remplacement n’est pas couvert par la garantie, l’Acheteur doit aussi payer à KM un montant qui couvre les coûts reliés au technicien et aux pièces de remplacement. 7.8 La garantie de KM est valide seulement si les biens sont installés et/ou utilisés conformément aux instructions et à la pratique courante de KM. 7.9 KM n’est pas responsable dans les cas suivants : dommages causés par le transport assumé par l’Acheteur, modifications des biens, dommage ou défectuosité causé par une mauvaise manutention après la livraison, mauvaise installation ou maintenance. Dans de tels cas, l’Acheteur doit indemniser, défendre et ne pas tenir responsable KM dans l’éventualité d’une réclamation contre ce dernier. KM n’est pas responsable de la détérioration et de l’usure normale. KM est uniquement responsable de la réparation, du remplacement ou du remboursement des biens défectueux. KM n’est en aucun cas responsable des dommages indirects et des pertes indirectes, comme la perte de profits, la perte d’exploitation ou la perte de production.
7.8 Documentation et spécification technique
8.1 KM doit livrer les biens conformément aux spécifications techniques mentionnées dans les brochures commerciales ou techniques applicables de KM. KM peut effectuer des modifications mineures sans en informer l’Acheteur. À moins d’avis contraire, les biens doivent être conformes aux normes autorisées norvégiennes, lesquelles s’appliquent à l’Espace économique européen (EEE). 8.2 À moins d’avis contraire par écrit, les documents relatifs à l’installation
Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
et au fonctionnement doivent être rédigés en anglais. Ces documents techniques doivent être livrés en respectant la formulation et la mise en page de KM.
7.9 Force majeure
La définition de « force majeure » de la Chambre de commerce internationale (brochure no 421) s’applique aux présentes conditions. Ce qui suit s’applique également : pénurie de transport, de matériels ou de livraison des sous-traitants de KM. Dans le cas d’une force majeure de plus de 45 jours, l’Acheteur est en droit d’annuler la commande s’il fait face à un risque de perte réel.
7.10 Interdiction de falsifier et de modifier
10.1 L’Acheteur ne doit pas, de façon directe ou indirecte, fabriquer ou distribuer des contrefaits, des copies ou des imitations des biens appartenant à KM. Si l’Acheteur est un distributeur, il doit exiger de ses clients la même discrétion. L’Acheteur doit également exiger de ses employés, de ses propriétaires, de ses entreprises liées et de ses entrepreneurs la même discrétion. 10.2 À moins d’obtenir une autorisation de KM, l’Acheteur ne peut modifier les biens.
7.11 Résolution de conflits, loi applicable
11.1 Si l’Acheteur fait partie d’un pays de l’Union européenne (UE) ou de l’Association européenne de libre-échange (AELE), tous les conflits relevant des présentes conditions ou s’y rapportant, ou tout contrat consécutif à ses conditions doivent être réglés par la cour du compté de Asker og Bærum, près de Oslo en Norvège. 11.2 Lorsque l’Acheteur vient d’un autre pays, les conflits doivent être réglés en arbitrage accéléré conformément aux règles de l’Institut d’arbitrage et de résolution de confits de la chambre de commerce d’Oslo, en anglais, à Oslo. À titre d’exception à cette clause d’arbitrage, KM peut entamer, dans le cas d’un paiement exigible, une procédure de récupération de la dette, y compris des actions en justice à la cour mentionnée ci-dessus ou demander des mesures interlocutoires (c’est-à-dire des mesures conservatoires et protectrices) à cette cour ou à toute autre cour. 11.3 Les présentes conditions et tout contrat de vente s’y rattachant doivent être régis par la convention des Nations Unies relative aux contrats pour la vente internationale de biens de 1980, complétée, lorsque insuffisante, par les lois de la Norvège dans les domaines légaux autres que ceux visés par la convention.
8 CONDITIONS GÉNÉRALES POUR L’INGÉNIERIE ET LA MISE EN SERVICE
8.1 INGÉNIERIE
Les conditions relatives à l’ingénierie durant le projet sont définies comme suit :

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Kongsberg Maritime est responsable de l’ingénierie de l’équipement couvert par le présent contrat et ce dernier respecte les spécifications techniques qui forment le contrat (p. ex. : configuration/architecture des systèmes, distribution de l’alimentation électrique, distribution de l’interface interne, etc.).
Le présent contrat ne comprend pas l’ingénierie relative à la conception de l’équipement qui n’est pas couvert par le contrat, ni du fonctionnement de cet équipement (p. ex. : modèle de fonctionnement, liste d’instruments, interface de ligne série avec d’autres fabricants, raccords à d’autres équipements, etc.).
Kongsberg Maritime accepte des travaux d’ingénierie spéciaux sur demande.
8.2 Mise en service
Les jours alloués pour la mise en service sont calculés entre la date de départ de la base et la date de retour, et comprennent les déplacements, les délais d’attente et les jours de travail comprenant les dépenses suivantes :
Honoraires de l’ingénieur de maintenance
Coûts relatifs aux déplacements
Hôtel, repas et frais de séjour
8.3 Conditions de la mise en service Les ingénieurs de la mise en service doivent recevoir leurs ordres par écrit
au moins trois semaines avant le début des travaux. L’ingénieur de la mise en service est au service du client. Toute tâche déléguée à l’ingénieur de mise la mise en service sera catégorisée comme travail de mise en service.
Le chantier naval est responsable de l’installation, du câblage, de la vérification des lignes et de l’interface de tout l’équipement branché au système avant la mise en service. L’équipement des autres fournisseurs qui est branché au système n’est pas couvert par le présent contrat. Kongsberg Maritime est uniquement responsable du bon fonctionnement de ses systèmes.
Kongsberg Maritime doit avoir accès à une alimentation électrique pour tous ses équipements.
Le client doit désigner une personne qui connaît le système/l’installation et qui est autorisée à signer les rapports de travaux quotidiens/hebdomadaires. Cette personne doit être disponible en tout temps durant la période de mise en service.
Le système doit être vérifié et approuvé par l’ingénieur diplômé de Kongsberg Maritime avant que Kongsberg Maritime n’accepte une provision pour garanties.
Les conditions relatives à la mise en service se fondent sur les heures de travail normales, soit 10 heures par jour, du lundi au vendredi (pour la mise en service), et de 12 heures par jour, du lundi au dimanche, pour les essais en mer. Les heures de travail dépassant les heures allouées pour la mise en service et les jours supplémentaires consacrés à la mise en service qui

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
dépassent le nombre de jours prescrits dans la section relative à la fourniture seront chargées au taux horaire standard.
Tout ajout ou toute modification qui n’est pas couvert par les obligations contractuelles doit être précisé par le gestionnaire de projet, soit les modifications techniques, les ajustements de prix, les modifications apportées au délai de livraison et autres conditions.
8.4 Délai d’attente/temps supplémentaire pour la mise en service Les conditions relatives aux coûts d’attente et de mise en service durant les essais de mise en service/au quai et les essais en mer sont définies comme suit :
Le délai d’attente et les coûts relatifs aux défauts causés par le chantier naval ou par d’autres fabricants seront déduits du temps accordé à la mise en service précisé dans la présente proposition.
Le délai d’attente/délai de mise en service supplémentaire sera couvert par le chantier naval au taux quotidien normal.
8.5 Dommages causés aux pièces et à l’équipement Les pièces endommagées par le client seront facturées conformément à la liste de prix.
8.6 Rapport de mise en service Lorsque les travaux de mise en service sont terminés, l’ingénieur de la mise en service, de concert avec le client, doit rédiger un rapport final qui comprend les problèmes restants qui doivent être examinés et le rapport doit être signé par l’ingénieur de la mise en service et par le représentant autorisé du client.

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
ANNEXE C
PROPOSITION POUR LE SYSTÈME DE SURVEILLANCE CCTV

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Kongsberg Maritime Système CCTV
KONGSBERG
Offre 04Q281
Fleetway
Kongsberg Maritime CCTV pour Marine Atlantic
Joeseph and Clara Smallwood, MV Caribou
N
o de l’offre : 04Q281/14 décembre 2004

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
MATÉRIEL DE BASE DU SYSTÈME Seize (16) Photo CAMERA COULEUR À L’ÉPREUVE
DES INTEMPÉRIES EXTREME EX10C 4 mm LNSBCK LT Emplacements :
2 x 4 machines principales
2 x 3 moteurs auxiliaires diesel
2 x 2 tunnels centraux
2 x 2 appareils à gouverner
2 x 2 chaudières
1 x purificateur de mazout lourd et de carburant diesel
3 x purificateurs d’huile de graissage
2 x 2 réducteurs
Un (1) Photo BLOC D’ALIMENTATION PRINCIPAL
PELMCS 16 Master CAM, 20 amp 16 out
Deux (2) Photo MONITEUR COULEUR PLAT DE 15 PO
Samsung SAOSMC150F
Un (1) Photo COMMUTATEUR-MÉLANGEUR À 20 POSITIONS
PELVA6220
Quatre (4) Photo CÂBLE COAXIAL (boîte)
TRICOAXRG59FT4
Vingt (20) Photo CONNECTEURS
BNC, RG59/62
N
o de l’offre : 04Q281/14 décembre 2004

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
Kongsberg Maritime Système CCTV
1 SERVICES ASSOCIÉS AU PROJET Gestion du projet
Après la signature du contrat, Kongsberg Maritime doit désigner un gestionnaire de projet qui sera responsable de l’administration et des communications quotidiennes avec le client. Le gestionnaire de projet doit établir un plan d’assurance de la qualité pour le projet, lequel doit préciser le calendrier de livraison et la documentation s’y rattachant. Les avancements du projet devront être communiqués chaque mois. Essais d’acceptation du client Le gestionnaire de projet est responsable de préparer une procédure d’essai d’acceptation du client pour le système livré, conformément au plan d’assurance de la qualité. La procédure d’essai sera remise au client en temps opportun avant les essais actuels. Une fois signé par le client, le document relatif aux essais d’acceptation du client constitue une acceptation finale de l’équipement installé. Les frais d’enquête à bord et autre dépenses encourues par la société de classification ne sont pas inclus. Supervision de l’installation, mise en service et aide pour les essais en mer Les services suivants sont inclus dans la présente proposition :
Supervision des travaux d’installation sur le chantier naval
Alimentation pour toutes les unités
Vérification des communications en bus et vérification du rendement du système
Aide pour les essais sur ligne bouclée (de concert avec le personnel du chantier naval)
Mise en service du système DP3, y compris PMS et commande du propulseur
Mise en service du système de navigation
Mise en service des systèmes du chantier naval (lest, systèmes de service du navire)
L’installation, la coupure et le marquage des câbles de campagne ne sont pas inclus. La vérification de continuité n’est pas incluse. Les frais de supervision de l’installation, de la mise en service et de l’aide pour les essais en mer sont inclus dans le prix proposé. Les frais de déplacement et de subsistance sont inclus également. Les frais pour les délais d’attente ne sont pas inclus.
N
o de l’offre : 04Q281/14 décembre 2004

Études des travaux de carénage de Marine
NM Caribou et NM Joseph & Clara Smallwood
2 PRIX ET CONDITIONS
Référence Système CCTV
Prix total/navire : 28 963 $ CAN
Paiement
Délai de livraison Le délai de livraison standard est de 9 à 12 mois à partir de la date de commande. Il est possible de négocier un autre délai.
Conditions Les conditions de Kongsberg Maritime AS s’appliquent (ci-jointes).
Douanes et taxes L’acheteur est responsable de tous les frais comme les droits à l’importation et les taxes exigibles de son pays sur l’équipement.
Conditions de livraison DDU Les Chantiers maritimes Halifax Limitée
Validité Cette offre est valide jusqu’à la fin janvier 2005. Les prix précisés dans la présente offre sont valides pour une livraison effectuée avant la fin octobre 2005.
N
o de l’offre : 04Q281/14 décembre 2004