new 3d technology for wirtgen offset slipform · pdf file1 wirtgen autopilot matthias fritz /...
TRANSCRIPT

1
WIRTGEN AutoPilot
Matthias Fritz / March 2012
New 3D Technology for Wirtgen Offset Slipform Pavers

2
WIRTGEN AutoPilot
Matthias Fritz / March 2012
Machine Introduction

3
WIRTGEN AutoPilot
Matthias Fritz / March 2012
Goals of the project
- Eliminate the string line: Easy to use 3D system for “anybody” but for a highly complex machine application
- Inexpensive but accurate - Fully integrated into machine onboard control
system - No surveying skills required - Missing innovations from the market for selected
applications - Platform for applications on other Wirtgen machines

4
WIRTGEN AutoPilot
Matthias Fritz / March 2012
Requirements
- Highly accurate and reliable real-time 3D Sensors including position and heading
- Augmentation sensors such as machine slopes, ultrasonic and laser sensors
- Rugged and reliable machine computer - System display to visually show information and
allow user interaction - A method to define design information (trajectory,
elevation- and slope profile) either in the office or directly in the field

5
WIRTGEN AutoPilot
Matthias Fritz / March 2012
First steps
Evaluation of GNSS sensors: - Autonomous low cost receivers - SBAS and Omnistar augmented receivers - RTK Base and Rover - Network RTK

6
WIRTGEN AutoPilot
Matthias Fritz / March 2012
First steps
Circle with 3m radius, 2m/min speed
Autonmous GNSS SBAS enabled L1 RTK

7
WIRTGEN AutoPilot
Matthias Fritz / March 2012
Overview Sensor Evaulation Results
- Autonumous GNSS is not accurate enough even for a short period of time
- SBAS augmented systems are not reliable and are highly depending on location. They drift particularly when losing signal.
- Omnistar is also highly depending on location, has very long initialization periods
- Omnistar HP is expensive, bound to a single receiver and not reliably available around the globe
- Network corrections have a high quality but require a local service - Surveying RTK has highest quality but expensive components - Robotic Totalstations are expensive, difficult to use for non-surveyors
and require additional heading sensor - L1 only, dual constellation RTK customized receivers show best
performance in regards to accuracy, cost and reliablity

8
WIRTGEN AutoPilot
Matthias Fritz / March 2012
The components and their functions
TWO AXIS SLOPE SENSOR Detection of pitch & slope
GNSS* SATELLITES *GNSS = GPS & GLONASS
DUAL GNSS* RECEIVER & REFERENCE STATION Position and Direction of the machine
WIRTGEN COMPUTER & CONTROL DISPLAY Control and adjustment of Hard- and Software Handling
ROTATION LASER & RECEIVER Height adjustment

9
WIRTGEN AutoPilot
Matthias Fritz / March 2012
Mechanical ski-sensor Accuracy ± 1 mm (0,05“)
☺☺Even surface
Options for height control of the machine
Ultra sonic sensor Accuracy ± 2 mm (0,1“)
☺☺even surface
GNSS Satellites Accuracy ± 20 mm (1“)
☺trimming only
Rotation laser & receiver Accuracy ± 2 mm (0,1“)
☺☺☺All applications
Height augmentation options
Robotic Totalstation Accuracy ± 2 mm (0,1“)
☺☺☺All applications

10
WIRTGEN AutoPilot
Matthias Fritz / March 2012
Preparation on site Turn on GNSS base station with open view to the sky
Machine alignment to concrete profile Azimuth Starting position Height
Power up the rotating laser and receiver

11
WIRTGEN AutoPilot
Matthias Fritz / March 2012
The components and their functions
The Wirtgen AutoPilot control display

12
WIRTGEN AutoPilot
Matthias Fritz / March 2012
GO!
13
WIRTGEN AutoPilot
Matthias Fritz / March 2012
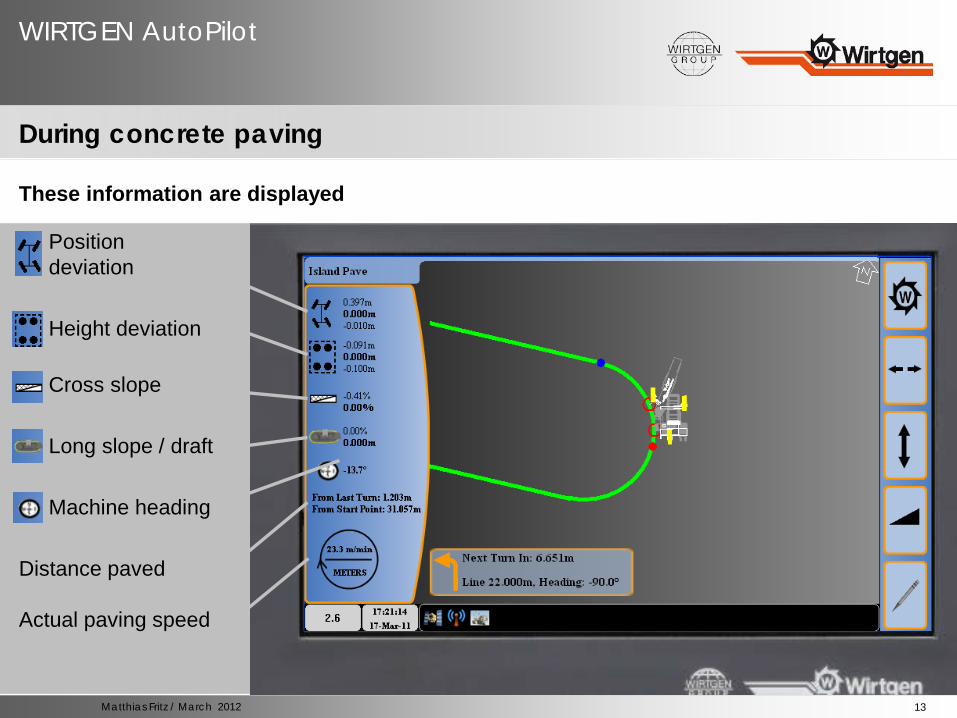
During concrete paving
These information are displayed
IIII Position deviation IIII Height deviation IIII Cross slope IIII Long slope / draft IIII Machine heading Distance paved Actual paving speed

14
WIRTGEN AutoPilot
Matthias Fritz / March 2012
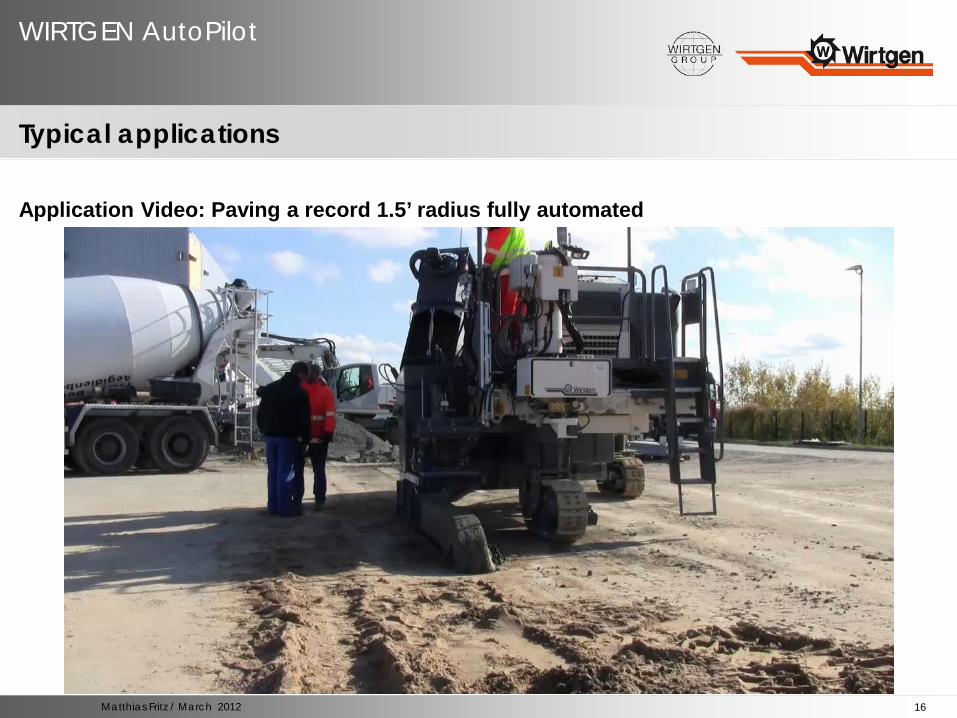
Typical applications

15
WIRTGEN AutoPilot
Matthias Fritz / March 2012
Typical applications
Pave a 1.5’(0.46m) radius fully automatic
Pave a 15’ (5m) inside radius fully automatic
16
WIRTGEN AutoPilot
Matthias Fritz / March 2012
Typical applications
Application Video: Paving a record 1.5’ radius fully automated