multiple object tracking using particle filterseprints.lancs.ac.uk/4373/1/ieee_aes_z06_0306.pdf ·...
TRANSCRIPT

Multiple Object Tracking Using Particle FiltersM. Jaward, L. Mihaylova, N. Canagarajah and D. Bull
Department of Electrical and Electronic Engineering, University of BristolWoodland Road, Bristol, BS8 1UB, UK
[email protected], [email protected]
Abstract—The particle filtering technique with multiple cuessuch as colour, texture and edges as observation features is apowerful technique for tracking deformable objects in imagesequences with complex backgrounds. In this paper, our re-cent work [1] on single object tracking using particle filters isextended to multiple objects. In the proposed scheme, trackinitialisation is embedded in the particle filter without rely-ing on an external object detection scheme. The proposedscheme avoids the use of hybrid state estimation for the es-timation of number of active objects and its associated statevectors as proposed in [2]. The number of active objects andtrack management are handled by means of probabilities ofthe number of active objects in a given frame. These proba-bilities are shown to be easily estimated by the Monte Carlodata association algorithm used in our algorithm.
The proposed particle filter (PF) embeds a data associationtechnique based on the joint probabilistic data association(JPDA) which handles the uncertainty of the measurementorigin. The algorithm is able to cope with partial occlusionsand to recover the tracks after temporary loss. The probabil-ities calculated for data associations take part in the calcula-tion of probabilities of the number of objects. We evaluatethe performance of the proposed filter on various real-worldvideo sequences with appearing and disappearing targets.
TABLE OF CONTENTS
1 INTRODUCTION
2 PROBLEM FORMULATION
3 MULTIPLE TARGET TRACKING
4 JOINT PROBABILITY DATA ASSOCIATION
5 EXPERIMENTAL RESULTS
6 DISCUSSION
7 CONCLUSIONS
1. INTRODUCTION
Tracking a group of targets in a video sequence is a commonproblem in many video surveillance applications. Video sur-veillance addresses real-time observation of targets such ashumans or vehicles in some environment, leading to a de-scription of the objects’ activities with the environment oramong them. It has been used for security monitoring [3], [4],
0-7803-9546-8/06/ $20.00/c©2006 IEEE
IEEEAC paper # 1280
as well as for traffic flow measuring [5], accident detection onhighways, and routine maintenance in nuclear facilities.
This paper addresses the problem of tracking multiple tar-gets in video sequences. The objective is to detect and tracktargets which can undergo non-rigid deformations, rotationsor partial occlusions. Tracking is based on multiple inde-pendent particle filters and the Probabilistic Data Association(PDA) algorithm which afford to handle the uncertainty dueto the measurement origin. The data association algorithmalso helps to recover from partial occlusions. The proposedalgorithm can estimate the number of active targets in thevideo sequence and can accordingly increase the number oftracking filter(s) or stop unwanted tracking filter(s).
In many of the previously developed tracking techniques, thefirst fundamental problem encountered is the object segmen-tation which extracts the areas (or objects) of interest from thescene. The extracted regions are used as measurements (ob-servations) for tracking algorithms. These foreground seg-mentation techniques are typically computationally expen-sive because they operate over the whole image scene [6].
Algorithms which attempt to find the target of interest with-out using segmentation have been proposed for single targettracking based on cues such as colour, edges and textures [1].Recently, the integrated detection and tracking using parti-cles has been extended for multiple targets. Many of theseschemes rely on hybrid sequential state estimation. In [2],the state vector denoting all the existing targets is augmentedby a discrete random variable which represents the numberof existing objects in a video sequence. The particle filterdeveloped in [7] has multiple models for the object motion,and comprises an additional discrete state component, de-noting which of the motion models is active. The BayesianMultiple-Blob Tracker (BraMBLe) [8] presents a multiple-person tracking system based on statistical appearance mod-els. The multiple blob tracking is managed by incorporatingthe number of objects present in the state vector and state vec-tor is augmented as in [2] when a new object enters the scene.
The problem of multiple target tracking is more challengingthan the single target tracking and several issues which donot exist for single target tracking, has to be resolved for thesuccessful application of multiple target tracking algorithms.One issue is the management of multiple tracks caused bynewly appearing targets and the disappearance of already ex-isting targets. In the references mentioned before, this is

handled by the hybrid state estimation framework for jointtracking of all existing targets (with an extended state vec-tor). Joint tracking of targets avoids the possibility of severalindependent filters, but the identity of the individual targetsmight be lost, especially when targets are close to each other.A separate single tracking filter can be applied to multipletarget tracking, only when all targets are fairly well spaced.
When the targets are closer and/or cross each other, it hasbeen shown in aerospace applications [9], [10], [11], that dataassociation techniques can be used to track without loosingthe identity of each targets. However, the methods developedin [12] for radar data are not applicable to vision problemsdue to the absence of measurement equations in explicit form.In [12] the varying number of targets is estimated via cluster-ing techniques and the data association is performed by the2-D assignment algorithm (see e.g. the review from Chapter2 of [13]).
In this paper, a sequential Monte Carlo version of the dataassociation scheme is presented for tracking multiple targetsand the track management is handled by existence probabili-ties calculated from the data association stage. This proposedscheme is simple and does not demand high computationalresources.
This paper is organised as follows. The model of the mov-ing object is described in section 2. The particle filter (PF)JPDA algorithm is given in section 3. Section 4 yields thenew implemented Joint PDA scheme. Section 5 contains theexperimental results, followed by a discussion in section 6.Finally, the conclusions are highlighted in section 7.
2. PROBLEM FORMULATION
The aim is to sequentially perform simultaneous detectionand tracking of objects described by the same specified colourhistogramq∗, in a video sequenceZk = {z1,z2, . . . ,zk},wherezk denotes the image (vector of pixel values) at dis-crete time instantk. The state space approach requiresto specify a motion model, i.e., the evolution of the statep(xk|xk−1), and a measurement model, i.e., the link betweenstate and current measurementp(zk|xk). The next two sub-sections describe the model of the object motion and the mea-surement likelihood function.
State vector and dynamic model
The state vector at framek of a single object typically consistsof kinematic and region (or shape) parameters. For simplic-ity we use the random walk model, with the following statevector xk = [xk, yk]T , where(xk, yk) denotes the centerof the image region used for the colour histogram computa-tion. Note that other variables can be added, such as widthand height of image region, velocities and scale change rate,depending on the application. The state dynamics is typicallydescribed by a linear model:
xk = Fxk−1 + vk−1 (1)
whereF is the transition matrix (F = I for our random walkmodel) andvk−1 is the process noise, assumed to be white,zero-mean, Gaussian, with a covariance matrixQ.
Colour measurement model
The work described in this paper is based on colour measure-ment cue. Other measurements cues, e.g. texture, edges ormotion and joint variations of any of them can be used asthe measurement cue. The choice of the specific cue dependson many factors such as the resolution of the video, back-ground/foreground environment and dynamic nature of thetargets to be tracked. Following [14], [15], we do not use theentire imagezk as a measurement, but rather we extract fromthe image the colour histogramqk, computed inside the im-age region that is specified by the state vectorxk. The centeris defined by(xk, yk). Furthermore, we adopt the Gaussiandensity for the likelihood function of the measured colour his-togram as follows:
p(qk|xk) ∝ N (Dk; 0, σ2) =1√2πσ
exp{−D2
k
2σ2
}, (2)
whereDk is the distance between the reference histogramq∗
of objects to be tracked and the histogramqk computed fromthe current framezk in the region specified by the state vectorxk. The standard deviationσ of the Gaussian density in (2)is a design parameter.
If the two histograms are calculated overU bins, the distanceDk between two histograms is derived in [14] from the Bhat-tacharya similarity coefficient and defined as:
D2k = 1−
∑Uu=0
√q∗(u)qk(u).
3. MULTIPLE TARGET TRACKING
The multiple target tracking is based on a sequential MonteCarlo filter and a Monte Carlo data association is avoidingthe ambiguities caused by the different measurement origin.In this section, we explain the conceptual ideas behind theparticle filter.
Sequential Monte Carlo
Sequential Monte Carlo techniques also known as particle fil-tering and condensation algorithm and their applications inthe specific context of visual tracking, have been described inlength in the literature [16], [17], [18].
For tracking the object of interest, the posterior state distri-butionp(xk|Zk), also known as filtering distribution has tobe calculated at each time step. In Bayesian sequential esti-mation the filtering distribution can be computed accordingto the two step recursion:prediction step
p(xk|Zk−1) =∫
p(xk|xk−1)p(xk−1|Zk−1)dxk−1, (3)
and

filtering step
p(xk|Zk) ∝ p(zk|xk)p(xk|Zk−1), (4)
where the prediction step follows from marginalisation, andthe new filtering distribution is obtained through a direct ap-plication of the Bayes’ rule. This recursion requires the spec-ification of a dynamic model (see section 2) describing thestate evolution,p(xk|xk−1) and a model that gives the like-lihood of any state in the light of the current observation,p(zk|xk). The recursion is initialised with some distribu-tion for the initial statep(x0). Once the sequence of filter-ing distribution is known, point estimates of the state canbe obtained according to any appropriate function, leadingfor example to the Maximum a Posteriori (MAP) estimate,arg maxxk
p(xk|Zk), and to the Minimum Mean Square Er-ror (MMSE) estimate,
∫xkp(xk|Zk)dxk.
The basic idea behind the particle filter is very simple. Start-ing with a weighted set of samples{x(i)
k−1, w(i)k−1}N
i=1 approx-imately distributed according top(xk−1|Zk−1), new samplesare generated from a suitable proposal distribution, whichmay depend on the previous state and the new measurements,i.e., x(i)
k ∼ qp(xk|x(i)k−1,zk), i = 1, . . . , N . To maintain a
consistent sample, the new importance weights are set to
w(i)k ∝ w
(i)k−1
p(zk|x(i)k )p(x(i)
k |x(i)k−1)
qp(xk|x(i)k−1,zk)
, (5)
with∑N
i=1 w(i)k = 1. The new particle set{x(i)
k , w(i)k }N
i=1 isthen approximately distributed according top(xk|Zk). Theperformance of the particle filter depends on the quality of theproposal distribution. In this paper, we use the state evolutionmodelp(xk|xk−1) as a proposal distribution and this makesthe new importance weights in (5) become proportional to thecorresponding particle likelihoods. This implementation ofthe sequential Monte Carlo method corresponds to the boot-strap filter as proposed in [19].
4. JOINT PROBABILITY DATA ASSOCIATION
Data association is a problem of crucial importance for multi-ple target tracking because of the necessity to relate each mea-surement to the correct object. Several methods have beenproposed in the estimation and tracking literature [9], [10].In general multi-target tracking deals with state estimation ofan unknown number of targets. Some methods consider spe-cial cases with a constant or known number of targets. Theobservations are assumed to originate from different targetsor from clutter. The clutter is a special type of the so-calledfalse alarms, whose statistical properties are different fromthe targets. In some applications only one measurement is as-sumed available from each target, where in other applicationsseveral returns are available. This will of course reflect whichdata association method to use.
Several classical data association methods exist [20]. Thesimplest is the nearest neighbour (NN) method. In [9], this
is referred to as thenearest neighbour standard filterand ituses only the closest observation to any given state to per-form the measurement update step. The method can also beimplemented as a global optimisation, so that the total num-ber of observations for tracking the statistical distance is min-imised. Another multi-target tracking association method istheJoint Probabilistic Data Association(JPDA) which is anextension of theProbability Data Associationalgorithm [9]to multiple targets. It estimates the states by a sum over allthe association hypothesis weighted by the probabilities fromthe likelihood. The most general data association method isa computationally intensive algorithm called the multiple hy-pothesis tracking (MHT), which calculates every possible up-date hypothesis [21]. In [22], the so-called probabilistic MHT(PMHT) method is presented, using a maximum-likelihoodmethod in combination with the expectation maximisation(EM) method. A comparative study of JPDAF and PMHTis made in [23].
In [24], the solution to the assignment problem for data as-sociation is proposed within the Bayesian framework by in-corporating the association in the estimation equations. In[25], [26], this idea is suggested for particle filtering, whenthe problem of maintaining a track on a target in the presenceof intermittent spurious objects. Samples are drawn from theoverall target probability density. The so-called joint-filter in[27] is a solution to the joint data association and estimationproblem for particle filters. The estimation is performed bya particle filter and a Gibbs sampler [28] is used for the dataassociation. The case with unknown number of targets is han-dled by a multiple hypotheses test.
In this paper, the JPDA approach is used, which is an ex-tension of the PDA approach [9], [10] for single targets. Inthe JPDA, a known number of targetsτ is assumed. The in-dex t = {1, . . . , τ} designates one among theτ targets. Themeasurements at time stepk are denoted aszk = {zj
k}mkj=0,
where an artificial measurementz0 is introduced to handlefalse alarms or clutter and the number of measurements isgiven bymk. The measurement to target association proba-bilities are evaluated jointly across the targets. Letθ denotesthe joint association event (the time indexk is omitted forsimplicity) andθj
t is the particular event which assigns themeasurementj to the targett. By assuming that the estima-tion problem is Markovian and by applying the Bayes’ theo-rem, the joint association probabilities are
P (θ|Zk) =1cp(zk|θ, Xk)P (θ|Xk), (6)
wherec is a normalisation constant andXk = {x1, . . . ,xk}.Additionally, it is assumed that the measurements are de-tected independently of each other. The probability of the as-signmentθ conditioned on the sequence of the targets’ statesP (θ|Xk) is approximated by
P (θ|Xk) = P τ−nD (1− PD)nP
mk−(τ−n)FA , (7)

wherePD denotes the probability of detection,n is the num-ber of z0 assignments andPFA denotes the probability offalse alarm.
The innovation between thej-th measurementzjk and the
predicted measurementzjt,k of target t at time stepk is
νjt,k = zj
k − zjt,k andSj
t,k is the corresponding innovation
covariance matrix. Then the normalised innovationdjt,k is
defined as
djt,k = (νj
t,k)T (Sjt,k)−1νj
t,k. (8)
By assuming that the measurement is of dimensionM , it fol-lows that theM -dimensional Gaussian association likelihoodfor thej-th measurement to the targett
p(νjt,k) =
1(2π)M/2|Sj
t,k|1/2exp
{−(dj
t,k)2
2
}, (9)
where|Sjt,k| is the determinant ofSj
t,k.
Finally, the probability of an individual joint association eventis given by
P (θ|Zk) = P τ−nD (1− PD)nP
mk−(τ−n)FA
∏θj
t∈θ
p(νjt,k). (10)
As shown in [29], the number of associations increases expo-nentially with an increase in the number of measurements andtargets, rendering the use of all hypothesis infeasible for evenmoderate values for these quantities. The number of possi-ble associationsλ, given thatND of theτ targets have beendetected, is
Nλk(ND, τ) =
mk!τ !ND!(mk −ND)!(τ −ND)!
(11)
and so the total number of possible hypotheses (sinceND isnot known) is
min(mk,τ)∑ND=0
Nλk(ND, τ). (12)
Even for the case of three targets and three measurements,this amounts to 34 hypotheses. Therefore, in practice, it iscommon to apply gating techniques [9] to reduce the numberof hypotheses and the computational cost respectively.
Monte Carlo JPDA
In this subsection, we describe the Monte Carlo JPDA used inour tracking algorithm. The Monte Carlo version of JPDA hasbeen studied by several authors (see e.g. [30], [31]). A recentpaper of Vermaak et al. [32] surveys most of the approachesdeveloped earlier. In [32] marginal filtering distributions foreach of the targets are represented with Monte Carlo samples,or particles, instead of based on a Gaussian approximation,as it is done in the standard JPDAF. The JPDA particle filterimplemented in our paper is given below:
The JPDA particle filter for multiple target tracking
1. Initialisation.
Setk = 0, generateN samplesx(i)t,0 for all targets
t = 1, . . . , τ independently.x(i)t,0 is drawn fromp(xt,0),
for i = 1, . . . , N particles
2. Fort = 1, . . . , τ targets,
For j = 0, . . . ,mk measurements
Computeβjt,k =
∑θj
t,k∈θ P (θ|Zk) as the
summation over all the joint events in which the
marginal eventθjt,k of interest occurs.
For i = 1, . . . N particles compute the independent
weights for each particle according to
w(i)t,k =
∑mk
j=0 βjt,kp(zj
k|x(i)t,0) and normalise the
weights for each target:w(i)t,k =
w(i)t,k
PNi=1 w
(i)t,k
.
For each target, generate a new set{x(i∗)t,k }N
i=1,
by resampling withN times from{x(i)t,k}N
i=1, where
P (x(i∗)t,k = x
(i),tt,k ) = w
(i)t,k.
For i = 1, . . . N predict new particles
x(i)t,k+1 = Fx
(i∗)t,k + v
(i)t,k.
End For
End For
3. Increasek and iterate to step 2.
The algorithm assumes knowledge of the maximum numberof targets,τ . It starts with a single filter with uniformly dis-tributed particles across the image scene. The variance of thisfilter is used to monitor the convergence of the filter. Oncethis filter shows convergence (by convergence we mean thatthe variance of the PF, is less than a certain threshold value)a new filter is initialised with particles a priori uniformly dis-tributed across the image except at the region around the tar-get tracked by the first filter. The prior around the regiontracked by the first filter (the exclusion region) is zero. Thisselection of prior distribution avoids the likelihood of two fil-ters tracking the same object. The variance of this secondfilter monitors the convergence of the new filter. Once thesecond filter reaches convergence, another filter is initialisedwith a prior from the region not covered by the first two fil-ters. During the tracking process the number of objects and
the identity of active objects are estimated as shown in thenext paragraph. This is used to detect when an object disap-pears from the scene and to stop the corresponding trackingfilter.
Let P (Ht|Zk) (t = 1, . . . , τ) denote the posterior probabil-ity of the existence oft number of targets. In general, thisprobability depends on the ‘full’ hypothesis list which con-siders all possible hypotheses from frame1 to framek. How-ever, it can be approximately estimated from the hypothesesassumed in the Monte Carlo JPDA. According to the totalprobability theorem, the existence probability oft number oftargets is given by
P (Ht|Zk) =∑θ∈χt
P (θ|Zk), t = 1, . . . , τ. (13)
whereχt is the event (hypothesis) thatt number of targetsexists. Similarly to this, joint existence probabilities of spe-cific targets (such as the existence of target 1 with target 2 ortarget 1 with target 3) also can be estimated. LetHt1,t2,...,tρ
be the hypothesis thatt1, t2, . . . , tρ targets exist, withρ beingthe number of active targets. Then the existence probabilityof this event is given by:
P (Ht1,t2,...,tρ|Zk) =
∑θ∈χt1,t2,...,tρ
P (θ|Zk), (14)
whereχt1,t2,...,tρdenotes the events that targets{t1, t2, . . . , tρ}
exist. These probabilities are used for the purpose of trackmanagement. If a target (tracked by the algorithm) disap-pears from the scene, the changes in the number of objectsis reflected in the probabilitiesP (Ht|Zk). From the proba-bilities P (Ht1,t2,...,tρ
|Zk), we can obtain the identity of thetarget which just disappeared. Accordingly, we can stop thecorresponding filter and reinitialise for tracking a new target.The use of these probabilities in track management is furtherexplained in the next section with examples.
5. EXPERIMENTAL RESULTS
The proposed algorithm is tested over real-world video se-quences with a changing number of football players (the sameas in [2]). The aim is to track all red players. The max-imum number of targets is three (τ = 3). The algorithmis implemented withN = 500 samples for each filter, withU = 128×128×128 number of bins for the colour cue, witha system noise covarianceQ = diag{15, 15} and a mea-surement noise covarianceσ2 = 0.12. The number of mea-surements available ismk = 3 and they are obtained fromimage regions specified by the state vector. When the numberof objects being tracked is less thanmk = 3, the remain-ing observations are image regions pointing to a region withno relevant colour information. This serves as clutter in thevisual tracking process.
Figure 3 shows several frames to illustrate the work of theproposed algorithm. At frame 1, one filter is initialised withrandom samples uniformly spread all over the image frame.
As shown in Figure 1 (frame 20), this filter initially attemptsto track all red players but gradually converges to the red per-son on the right (frame 40). At frame 41, a new filter is ini-tialised with an initial prior distribution uniformly distributedacross all regions except the region around the already trackedobject. The frame 41 shows these samples. This selection ofthe initial prior avoids the occurrence of a new filter trackingthe already tracked person by the first filter. At frame 52, bothfilters are tracking two persons and at frame 53, a new filter(third filter) is initialised with a prior covering all regions ex-cept two regions already tracked by first two filters. Afterten frames (at frame 63), all three objects are tracked by theproposed algorithm.
0 50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Pr (one target is active)Pr (two targets are active)
Frame number
Pr (three targets are active)
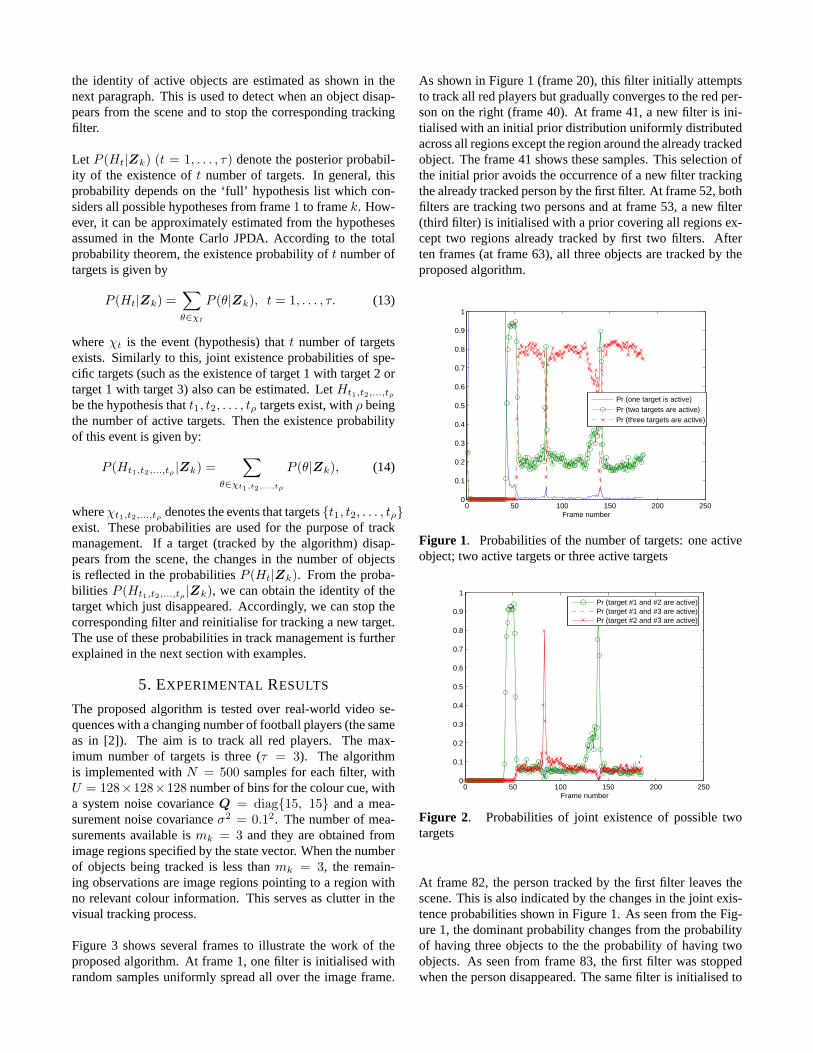
Figure 1. Probabilities of the number of targets: one activeobject; two active targets or three active targets
0 50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frame number
Pr (target #1 and #2 are active)Pr (target #1 and #3 are active)Pr (target #2 and #3 are active)
Figure 2. Probabilities of joint existence of possible twotargets
At frame 82, the person tracked by the first filter leaves thescene. This is also indicated by the changes in the joint exis-tence probabilities shown in Figure 1. As seen from the Fig-ure 1, the dominant probability changes from the probabilityof having three objects to the the probability of having twoobjects. As seen from frame 83, the first filter was stoppedwhen the person disappeared. The same filter is initialised to

Frame 1 Frame 20
Figure 3. Image frames of a football sequence: detected and tracked players are marked with a rectangle and the circles denotethe locations of particles

track any new objects appearing in the image scene. The ini-tialisation is similar to the earlier one and the initial samplesare obtained from regions not covered by the two trackingfilters (the 2nd and the 3rd). It is important to know whichobject disappeared and which filter is reinitialised. Figure 2shows different existence probabilities of having two objects(i.e., probabilities of having object 1 with 2, 1 with 3, and 2with 3). Figure 2 indicates also that around the frame 82 theprobability of having objects 2 and 3 is very high comparedto other possibilities. This illustrates that the object 1 is thedisappeared object and we can reinitialise then filter 1.
6. DISCUSSION
Advantages of the proposed algorithm are its computationalsimplicity. The technique developed can be extended to dealwith full occlusions, e.g. when the targets cross their paths.In order to be able to cope with full occlusions, unique fea-tures from each target are required, which is an open issue forfuture research. Additionally, separate detection techniques,such as image segmentation, can be used to detect the targetsand to speed up the process of target track initiation. Inves-tigations are currently going on the development of adaptivecues able to deal with changeable illumination on the scene.
7. CONCLUSIONS
This paper presents a JPDA particle filter for multiple targetstracking in video sequences. The experimental results fromreal video sequences show its reliable performance. The al-gorithm is characterised with low computational complexityand is able to cope with partial occlusions and recover aftertemporary loss. We evaluate the number of objects in the cur-rent frame and the track management is handled using proba-bilities of the number of objects in the same frame.
Acknowledgements. The authors are grateful to the finan-cial support by the UK MOD Data and Information FusionDefence Technology Centre.
REFERENCES
[1] P. Brasnett, L. Mihaylova, N. Canagarajah, and D. Bull,“Particle filtering for multiple cues for object trackingin video sequences,” inProc. of the 17th SPIE AnnualSymposium on Electronic Imaging, Science and Tech-nology, 2005, vol. 5685, pp. 430–440.
[2] J. Czyz, B. Ristic, and B. Macq, “A color-based par-ticle filter for joint detection and tracking of multipleobjects,” inProc. of the ICASSP, 2005.
[3] E. Stringa and C.S. Regazzoni, “Real-time video-shotdetection for scene surveillance applications,”IEEETrans. Image Processing, vol. 9, pp. 69–79, Jan. 2000.
[4] I. Haritaoglu, D. Harwood, and L. Davis, “w4: who?when? where? what? a real time system for detectingand tracking people,” inProc. IEEE Conf. Face GestureRecognition, 1998, pp. 222–227.
[5] D. Koller, J. Weber, T. Huang, J. Malik, B. Rao G. Oga-sawara, and S. Russell, “Toward robust automatic trafficscene analysis in real-time,” inProc. Int. Conf. PatternRecog., 1994, vol. 1, pp. 126–131.
[6] J. Vermaak, S. Maskell, M. Briers, and P. Perez, “Aunifying framework for multi-target tracking and exis-tence,” inProc. of the 8th International Conf. on Infor-mation Fusion, 2005.
[7] M. Isard and A. Blake, “A mixed-state condensationtracker with autmatic model-switching,” inProc. Int.Conf. Computer Vision, 1998, pp. 107–112.
[8] M. Isard and J. MacCormick, “Bramble: a Bayesianmultiple blob tracker,” inProc. Int. Conf. Computer Vi-sion, 2001, pp. 34–41.
[9] Y. Bar-Shalom and X.R. Li,Estimation and Tracking:Principles, Techniques and Software, Artech House,Boston, MA, 1993.
[10] S. Blackman and R. Popoli,Design and Analysis ofModern Tracking Systems, Artech House, 1999.
[11] W. Ng, J. Li, S. Godsill, and J. Vermaak, “A review ofrecent results in multiple target tracking,” inProc. of theInternational Symp. on Signal Processing and Analysis,2005.
[12] W. Ng, J. Li, S. Godsill, and J. Vermaak, “Trackingvariable number of targets using sequential monte carlomethods,” inProc. of IEEE Statistical Signal ProcessingWorkshop, 2005.
[13] Bar-Shalom and W. Blair, Eds.,Multitarget-MultisensorTracking: Allpications and Advances, Artech House,2000.
[14] D. Comaniciu, V. Ramesh, and P. Meer, “Real-timetracking of non-rigid objects using mean shift,” inProc.IEEE Conf. Comp. Vis. Pattern Rec., 2000, pp. 142–149.
[15] K. Nummiaro, E. Koller-Meir, and L. Van-Gool, “Anadaptive color-based particle filter,”Image and VisionComputing, vol. 21, pp. 99–110, 2003.
[16] M. Isard and A. Blake, “Contour tracking by stochasticpropagation of conditional density,” inEuropean Conf.on Comp. Vis.1996, pp. 343–356, Cambridge, UK.
[17] M. Isard and A. Blake, “Condensation – conditionaldensity propagation for visual tracking,”Intl. Journalof Computer Vision, vol. 28, no. 1, pp. 5–28, 1998.
[18] P. Perez, J. Vermaak, and A. Blake, “Data fusion fortracking with particles,”Proceedings of the IEEE, vol.92, no. 3, pp. 495–513, March 2004.
[19] N. Gordon, D. Salmond, and A. Smith, “Novel ap-proach to nonlinear/ non-Gaussian Bayesian state esti-mation,” IEE Proc.-F, vol. 140, no. 2, pp. 107–113,1993.
[20] T. Kirubarajan and Y. Bar-Shalom, “Probabilistic dataassociation techniques for target tracking in clutter,”Proc. of the IEEE, vol. 92, no. 3, pp. 536–557, 2004.

[21] D. Reid, “An algorithm for tracking multiple targets,”IEEE Trans. Aut. Contr., vol. 24, no. 6, pp. 84–90, 1979.
[22] H. Gauvrit, J-P. Le Cadre, and C. Jauffret, “A formula-tion of multitarget tracking as an incomplete data prob-lem,” IEEE Trans. Aerospace and Systems, vol. 33, no.4, pp. 1242–1257, Oct. 1997.
[23] C. Rago, P. Willett, and R. Streit, “A comparison of theJPDAF and PMHT tracking algorithms,” inProc. of theICASSP, 1995, vol. 5, pp. 3571–3574.
[24] D. Avitzour, “A stochastic simulation bayesian ap-proach to multitarget tracking,”IEE Proc. Radar, Sonarand Navig., vol. 142, pp. 41–44, 1995.
[25] D.J. Salmond, D. Fisher, and N.J. Gordon, “Trackingom the presence of intermittant spurious objects andclutter,” in SPIE Conf. on Signal and Data Processingof Small Targets, 1998.
[26] N.J. Gordon, “A Hybrid Bootstrap Filter for TargetTracking in Clutter,” IEEE Trans. on Aerospace andElectronic Systems, vol. 33, no. 1, pp. 353–358, 1997.
[27] C. Hue, J-P. Le Cadre, and P. Perez, “Tracking multipleobjects with particle filtering,”IEEE Trans. Aerospaceand Systems, vol. 38, no. 3, pp. 791–812, July 2002.
[28] S. Gemen and D. Gemen, “Stochastic relaxation, Gibbsdistributions and the Bayesian restoration of images,”IEEE Transactions on Pattern Analysis and Machine In-telligence, vol. 6, pp. 721–741, 1984.
[29] B.Ristic, S. Arulampalam, and N.Gordon,Beyond theKalman Filter: Particle Filters for Tracking Applica-tions, Artech House Radar Library, 2004.
[30] R. Karlsson and F. Gustafsson, “Monte Carlo data as-sociation for multiple target tracking,” inIEE TargetTracking: Algorithms and Applications, Netherlands,Oct 2001.
[31] D. Schultz, W. Burgard, D. Fox, and A.B. Cremers,“Tracking multiple moving targets with a mobile robotusing particle filters and statistical data association,” inIEEE Internation. Conf. on Robotics and Autom., 2001.
[32] J. Vermaak, S.J. Godsill, and P. Perez, “Monte Carlofiltering for multi-target tracking and data assoication,”IEEE Trans. Aerospace and Systems, vol. 41, no. 1, pp.309–332, January 2005.
Mohamed Jawardreceived the PhDdegree in Automatic Control and Sys-tems Engineering from the University ofSheffield, UK in 2002. He is a ResearchAssistant at the Department of Electricaland Electronic Engineering, Universityof Bristol, UK. His research interests in-clude multiple models, sequential Monte
Carlo methods, target tracking in video sequences, fault de-tection and data detection in communication systems.
Lyudmila Mihaylovaobtained her MScand PhD degree in Systems and Con-trol Engineering from the Technical Uni-versity of Sofia, Bulgaria. From 1996-2000 she was a Research Scientist at theBulgarian Academy of Sciences and asa part-time Assistant Professor at Tech-nical University of Sofia. In the period
2000-2004 she had temporary positions as a Research Asso-ciate at Katholieke Universiteit Leuven and at the Universityof Ghent, Belgium. Since February 2004 she has been a Re-search Fellow at Bristol University, UK. Her interests are inthe area of nonlinear filtering, statistical signal processing,sensor data fusion, machine learning, control and intelligentautonomous systems. She has authored over 50 papers inconference proceedings and journals. Dr. Mihaylova is amember of the IEEE, Signal Processing Society and of theInternational Society of Information Fusion.
Nishan Canagarajah is currently aProfessor of Multimedia Signal Process-ing at Bristol. Prior to this he wasan RA and lecturer at Bristol investi-gating DSP aspects of mobile radio re-ceivers. He has BA (Hons) and a PhDin DSP Techniques for Speech Enhance-ment both from the University of Cam-
bridge. His research interests include image and video cod-ing, image segmentation, content based video retrieval, 3Dvideo, image fusion and the application of signal processingto audio and medical electronics. He is widely supported inthese areas by industry, EU and the EPSRC. He has beeninvolved in a number of FP5 and FP6 projects where theteam has been developing novel image/video processing al-gorithms. He has published more than 150 papers and twobooks. He is a member of the EPSRC College.
David Bull is Professor of SignalProcessing and Head of the Electricaland Electronic Engineering Departmentat the University of Bristol. Prior to hiscurrent appointment he has been a Sys-tems Engineer at Rolls Royce and subse-quently a Lecturer at Cardiff University.He leads the Signal Processing activities
within the Centre for Communications Research where he isDeputy Director. He has been a member of the UK ForesightPanel and the Steering Group for the DTI/EPSRC LINK pro-gramme in Broadcast Technology and is currently on the EP-SRC Peer Review College. He is a past director of the VCE inDigital Broadcasting and Multimedia Technology and is cur-rently Chairman and Technical Director of ProVision Com-munication Technologies Ltd., specialising in wireless multi-media communications. David Bull has worked widely in thefields of 1 and 2-D signal processing and has published over250 papers, various articles and 2 books. He has won twoIEE Premium awards for this work. His current research isfocused on the problems of image and video communicationsfor low bit rate wireless, internet and broadcast applications.