multi-objective shape segmentation and...
TRANSCRIPT

Eurographics Symposium on Geometry Processing 2009Marc Alexa and Michael Kazhdan(Guest Editors)
Volume 28 (2009), Number 5
Multi-objective shape segmentation and labeling
P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh
Dynamic Graphics Project, University of Toronto
Abstract
Shape segmentations designed for different applications show significant variation in the composition of theirparts. In this paper, we introduce the segmentation and labeling of shape based on the simultaneous optimizationof multiple heterogenous objectives that capture application-specific segmentation criteria. We present a numberof efficient objective functions that capture useful shape adjectives (compact, flat, narrow, perpendicular, etc.)Segmentation descriptions within our framework combine multiple such objective functions with optional labelsto define each part. The optimization problem is simplified by proposing weighted Voronoi partitioning as a com-pact and continuous parametrization of spatially embedded shape segmentations. Separation of spatially close butgeodesically distant parts is made possible using multi-dimensional scaling prior to Voronoi partitioning. Opti-mization begins with an initial segmentation found using the centroids of a k-means clustering of surface elements.This partition is automatically labeled to optimize heterogeneous part objectives and the Voronoi centers and theirweights optimized using Generalized Pattern Search. We illustrate our framework using several diverse segmen-tation applications: consistent segmentations with semantic labels, bounding volume hierarchies for path tracing,and automatic rig and clothing transfer between animation characters.
Categories and Subject Descriptors (according to ACM CCS): Computational Geometry and Object Modeling[I.3.5]: Geometric algorithms, languages, and systems.—
1 Introduction
Digital 3D models, represented as polygon meshes or pointclouds, are extensively used in engineering design, ani-mation, games and medicine. These models are invariablystructured into parts dictated by their application: limbs forarticulated character rigging, functional components for en-gineering simulations, tight bounding volumes for efficientrendering or labeled anatomic structures for medical visu-alization. The partitioning of a model into such parts is re-ferred to as shape segmentation, and its automation for vari-ous applications is an important area of ongoing research.
Most object classes and segmentation applications havedomain-specific knowledge that can help define object partsas well as provide them with semantically meaningful la-bels. Humans for example [Ric08] have well-documentedrelationships between different body parts. The humanoidsin Fig. 9, after being consistently segmented and labeledto have a head, torso, arms and legs, can be automaticallyrigged, clothed and even morphed into each other.
While it is not reasonable for users to manually segmentand label hundreds of shapes, one can imagine that a user-specified description of segments and labels can suffice toautomatically segment and label an entire class of objectsconsistently. Current shape segmentation algorithms, unfor-tunately, are designed to optimize fixed objectives such asconcave boundaries [KT03] and ellipsoidal [SS05], symmet-ric [MGP06] or convex [KJS07] parts. These approachestypically limit user input to the number of desired segmentsand a handful of threshold values. The current approach toincorporate domain knowledge is to design and implementa new segmentation algorithm, which is infeasible for mostusers, e.g. artists, animators, medical experts.
Contributions
We present a framework for shape segmentation that al-lows for the incorporation of domain-specific knowledgethrough arbitrary objective functions that geometrically de-scribe each segment (with an optional label). These objec-tives can be unary, asserting properties of an individual part,
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.Published by Blackwell Publishing, 9600 Garsington Road, Oxford OX4 2DQ, UK and350 Main Street, Malden, MA 02148, USA.

P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
e.g. that it should be narrow, compact, flat, or they can by n-ary, referring to part inter-relations, e.g. a set of parts shouldbe parallel to each other, or have the same approximate size,or two parts should be perpendicular to each other. We thuscast the segmentation problem as a black-box optimizationminimizing an aggregate objective function over the spaceof segmentations.
Current approaches to shape segmentation are surface-based in that they explicitly represent segmentations as par-titions of mesh faces, the connectivity of segments beingseparately enforced. The combinatorial complexity of allpossible surface segmentations is enormous, and motivatesboth a more compact representation of surface segmenta-tions as well as efficient approaches to label assignmentand objective function minimization. We propose a volume-based segmentation, where a weighted Voronoi partition-ing of space implicitly defines a segmentation of any em-bedded shape (see Fig. 2 and 4). Shape segmentations arethus continuously parameterized by the Voronoi centers andweights defining each segment. Objects with complex artic-ulations are handled by embedding geodesic distances intoEuclidean space using multi-dimensional scaling (MDS)prior to Voronoi partitioning (see Fig. 3).
The Voronoi centers representing each part are initializedusing a k-means clustering of the given shape, where k isthe known number of parts. The initial segmentation is thenautomatically labeled according to the given objectives. Weshow optimal label assignment, when binary objectives areinvolved, to be NP hard but adapt an O(n3) algorithm foroptimally labeling unary objective functions and present anevolutionary approach to label n-ary objectives. We then op-timize the Voronoi centers and weights using GeneralizedPattern Search.
Voronoi partitioning can easily be made to preserve usefulgeometric properties such as symmetry, allowing us to (ifdesired) ensure a symmetric segmentation as well as reducethe dimensionality of the optimization domain for symmetricparts. Optimization complexity can also be reduced withinour framework by hierarchical segmentation.
Finally, we show the generality of our approach by apply-ing it to several diverse segmentation problems: consistentsegmentations with semantically meaningful labels, bound-ing volume hierarchies for path tracing, automatic characterrigging, and automatic transfer of clothing between anima-tion characters.
2 Related work
Current segmentation algorithms can be broadly classifiedinto the following groups.
Affinity: In affinity-based approaches, affinity metrics de-fine the likelihood of every pair of surface elements be-ing in the same segment. Segmentation algorithms seek tomaximize intra-segment similarity and inter-segment dis-
similarity based on these metrics. Examples include graphcut [KT03,KLT05,PSG∗06,LZ07,LZSCO09,GF08] and wa-tershed approaches [MW99, ZTS02]. Spectral embeddingsin which Euclidean distances correlate to the affinities be-tween surface elements [LZ07] can allow for affinity-basedapproaches to lend themselves well to volume-based seg-mentation.
Model fitting: In model fitting approaches, every segment ofthe mesh is assumed to be independently generated by a dif-ferent parameterized model. Model parameters can be fit tocandidate parts and, conversely, surface elements classifiedgiven a configuration of models. Optimization techniques forsuch segmentations include region growing [LMM98], vari-ational [SS05,JKS05] and hierarchical approaches [AFS06].Our weighted Voronoi parametrization of segmentationsshares the parametric continuity of model fitting approaches.
Property-based: Properties such as symmetry [TW05,MGP06,SKS06], convexity [CDST97,LA05,KS06,KJS07],tubularity [MPS∗04], texture [LMLR06, LMLR07], dif-fusion over surfaces [dGV08], and modes of vibration[HWAG09], are often held to some degree locally by thesegments but not by the overall surface. These properties aredifficult to capture through pairwise affinities of surface ele-ments or generative model approaches.
All these approaches have intrinsic limitations corre-sponding to their category. Affinity-based methods requirethat it be possible to evaluate the objective function for pairsof surface elements. This may be difficult for functions thatrequire a larger shape context to sensibly evaluate, such asbeing developable or co-axial. Moreover, these approachesare not amenable to optimizing heterogenous objectives, e.g.one part being convex and the other concave. Approachesbased on generative models, unfortunately, are also not ap-plicable to some common segmentation objectives such asconvexity or symmetry that are hard to formulate genera-tively. Finally, property-based approaches tend to be specifi-cally tailored to produce homogeneous segmentations, i.e. inwhich all parts possess the given property. Recent surveys ofsegmentation algorithms [AKM∗06, Sha08] show extensiveresearch addressing a wide range of segmentation criteria butalso a lack of general, automated frameworks to heteroge-neously combine existing and new segmentation criteria.
3 Multi-objective shape segmentation
While current approaches work well for their intended appli-cations, the incorporation of object- and application-specificknowledge can result in better quality and consistently la-beled segmentations (see Fig. 6, 7 and 9).
Implementing a segmentation algorithm from scratch is anon-trivial task beyond the capability of most users. Userscan thus convey domain knowledge to a general segmen-tation framework either by providing example labeled seg-mentations [SSSCO08], or by encoding this knowledge us-ing a set of geometric objective functions. In this paper we
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.

P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
Convexity Narrow handle Combination
Liu and Zhang Kraevoy and Sheffer Simari and SinghSpectral Embedding Convexity Ellipsoidal primitives
Figure 1: Above: Our multi-objective approach. Left: op-timizing for convex parts. Center: optimizing only for thenarrowness of the handle. Right: optimizing a combina-tion of these objectives and perpendicularity between headand handle. See Sec. 8. Below: Alternative approaches[LZ07, KJS07, SS05].
take the latter, novel approach by providing a general multi-objective segmentation and labeling framework and a work-ing set of useful geometric objectives (see Fig. 13) that userscan combine or augment to suit their application. Each partof a segmentation description is uniquely identified by alabel and a multi-objective function that geometrically de-scribes the part and (possibly) its relation to other parts. Ob-jectives for a labeled part may thus be unary (eg. narrow,flat, symmetric convex, compact, developable), binary (eg.perpendicular to, bigger than, adjacent to), or n-ary (eg. par-allel, coaxial, similar in size).
As a simple example, consider a hammer. This object isdefined by Merriam-Webster as “a hand tool consisting of asolid head set crosswise on a handle and used for pounding.”This naturally suggests two segmentation labels: handle andhead. Moreover, it suggests the segmentation objective thatthe part labeled head be perpendicular to the part labeledhandle. Our knowledge might further suggest that the partsshould be approximately convex and that the part labeledhandle should be narrow. The effects of incorporating multi-ple objectives into the segmentation of a hammer shape canbe seen in Fig. 1.
Given a segmentation description, shape segmentationcan be cast as an optimization that minimizes an aggregateobjective function which combines, as the sum of squares,the objective functions describing each part label. The seg-mentation optimization algorithm thus decoupled from itslabeled description has the following characteristics: 1) Het-erogeneous objectives for different part labels allows theseparts to be distinguished from each other and overcomesthe drawback of a homogenous segmentation criterion as-sumed by existing segmentation techniques. 2) The objectivefunctions are evaluated on fully instantiated segmentations,avoiding the need of affinity-based approaches to evaluateobjectives sensibly on single face pairs. 3) As long as objec-tive function evaluation is possible, a generative model is notstrictly necessary (though certainly possible). 4) The frame-work easily allows for assertions not just about parts but ofinter-part relations using n-ary objectives. 5) Users wishingto define a new segmentation description can select from a
Standard Voronoi partition Weighted Voronoi partition
Figure 2: Comparison of the standard Voronoi partitioninduced by a random set of points and the multiplicativelyweighted Voronoi partition induced by points with the samelocations but varying associated weights.
set of existing objective functions (see Sec. 8) and new ob-jective functions seamlessly integrate into the framework.
4 Parameterizing segmentations
In order to optimize a segmentation with respect to an ag-gregate objective function as described above, we need tobe able to describe segmentations by means of some set ofparameters. The set of all possible segmentations can be pa-rameterized directly by a vector indicating the segment labelof each face explicitly, but such a parametrization would becumbersome, since the vast majority of the segmentationswould be undesirable, being unconnected, having compli-cated boundaries, etc. We would also like to avoid a surfaceparametrization, since this is its own difficult problem, andplaces topological constraints on the shape representation aswell as introducing distortion.
We thus propose the use of a Voronoi space partition to de-fine the surface segmentation of an embedded shape. A setof 3D points, each corresponding to a part label, naturallyinduces a segmentation on the shape by classifying each sur-face element according to the Voronoi region it occupies. Weclassify polygon faces based on their centroid but a segmen-tation at sub-face resolution can also be defined.
A natural limitation of this representation is that Voronoiregions are only capable of describing planar boundaries.Augmenting the centers with a distance scaling weight al-lows curved boundaries and non-convex regions. Formally,a point p’s distance to a center c with weight w is givenby ||p− c||/w. The result is known as a multiplicativelyweighted Voronoi partitioning [OBSC00] (see Fig. 2 and 4).
Ensuring segment connectedness: The set of Voronoipoints and weights defines a continuous-domainparametrization over a subset of all possible surfacesegmentations. In practice, the compact shape of Voronoicells naturally tends to induce connected and compactsurface segmentations. It is, however, possible to obtaindisconnected segments. To achieve connectivity we use apriority queue flooding scheme as introduced by Cohen-Steiner et al. [CSAD04] and successfully used in at leastone other segmentation approach [SS05].
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.

P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
Initial seg. Optimized seg. Corresponding seg.in MDS in MDS in initial shape
Figure 3: Segmentation induced by the partition in MDSspace is easily mapped through correspondence with theoriginal shape. See Sec. 8 and Fig. 13 for objective details.
Segmenting shapes under complex articulation: As ex-pected, surface elements within a Voronoi region will tendto be proximal in Euclidean space. For many desired sur-face segmentations, however, geodesic proximity is moreimportant than Euclidean proximity. While ensuring seg-ment connectivity alleviates the problem of geodesically dis-tant surface elements belonging to the same segment, it doesnot address the fact that a part with complex articulationmay be hard to capture using a single Voronoi cell. Weaddress this concern using MDS as a pre-processing step,which has proven useful in other segmentation approaches[KLT05, LZ07]. We pre-compute all pairs of approximategeodesic distances between surface elements (using shortestpaths on the connectivity graph) and then use MDS to find a3D Euclidean embedding of the shape with these distances.The result is an unfurling of articulation such that Euclideandistances in the embedded shape approximate geodesic dis-tances in the original shape. One may now find a weightedVoronoi partition in the MDS space and optionally evaluateobjective functions in this space or the original undistortedone as is appropriate for the given objective. The resultingsegmentation is trivially mapped by element correspondenceto the original surface. Fig. 3 illustrates this approach bycleanly segmenting a highly articulated octopus model. Fig-ures 7 and 9 were also obtained using this technique.
5 Initial center placement
The first step in our optimization is to automatically find acoarse initial placement of partition centers which will serveas the initial guess for the optimization. We achieve this byway of k-means clustering where k is the known number oflabels. This approach has the advantages of simplicity andthe fact that it produces a Voronoi partition by construction,given that it is based on distance to cluster centers. It alsonaturally produces compact, similarly-sized segments.
The centers are initialized using furthest point initializa-tion: choose the farthest pair of surface points and then,while centers remain to be initialized, select the point withmaximum closest distance to the points chosen thus far. Ifadjacency information is available and connectivity of seg-ments is desired, the classification step of the k-means al-gorithm can be done using the previously-mentioned queue
Unlabeled Labeled andK-means seeding Optimized result
Figure 4: Left: Result of k-means approach to initialization.Right: Labeled and optimized result. See Sec. 8 and Fig. 13for objective details.
approach. Should a segment become empty, we select as itsnew center the surface element furthest from the current non-empty centers. Initial segmentations resulting from this ap-proach are illustrated in Fig. 3 (left), and 4 (left).
6 Assigning labels to segments
A set of partition centers induces a shape segmentation. Inmany, though not all (see Sec. 8) cases, however, the seg-mentation will refer to objectives of a heterogenous nature.For instance, in the hammer example of Fig. 1 the narrowobjective term refers only to the segment labeled handle.This means that labels must be assigned to each center priorto objective evaluation, as different labelings produce differ-ent objective function values. When there are relatively fewlabels and the objective is not computationally expensive,an exhaustive approach of all permutations may be feasible.As the number of segments grows, this approach quickly be-comes intractable. In the following, we present two alterna-tives to address this labeling problem.
Optimal unary objective labeling
If the segmentation makes use of only unary objectives, orif we consider only the set of unary objective terms for thepurposes of addressing the assignment problem, it is possibleto efficiently find an optimal labeling.
Assume that for each label j we have a set of k unaryobjective terms µ j,1,µ j,2, . . . ,µ j,k. We can build an n×n costmatrix C such that
Ci, j = ∑k
µ j,k(i)
which represents the cost of assigning label j to the part as-sociated with center i for all i, j pairs.
Given this cost matrix, we can now cast part labeling as anassignment problem which can be optimally solved in O(n3)by the Hungarian algorithm [Kuh55, Mun57]. Given C thealgorithm will return an assignment vector a such that a[i] =j indicates that the part associated with segment i shouldreceive label j to minimize the sum cost.
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.

P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
Evolutionary labeling
When objectives of higher arity are involved, the problemgrows in complexity. In fact, binary objectives suffice to re-duce the Traveling Salesman Problem (TSP) to our labelingproblem. Assume there are n cities and map them to single-point segments. Further assume we have labels l1, l2, . . . , lnindicating that the city labeled li should be the i-th visitedon the tour, and that the binary objective dist(li, l j) denotesthe distance between the cities labeled li and l j. The labelingwhich minimizes the aggregate objective
n
∑i=1
dist(li, l(i mod n)+1)
is the solution to the given TSP instance.
Thus motivated, we address the n-ary objective labelingproblem with an evolutionary approach. Such approacheshave had success in the past with problems such as TSP andother ordering problems [Mic98].
An individual in our population is naturally representedusing permutation encoding: a vector x of length n wherex[i] = j indicates segment i will receive label j. The fit-ness of an individual will be determined by the value theaggregate objective function takes when using the labelingspecified by the individual. We use tournament selectionas our selection strategy, in which a small random subsetof the previous population is considered and the individualwith highest fitness is selected. An individual can be mu-tated by uniform-randomly selecting two of its entries andinterchanging them. Finally, given two individuals x1 andx2, we can produce an offspring candidate y using uniformcrossover. In particular, we generate a uniformly random bitvector b and let y[i] := x1[i] if b[i] = 0 and y[i] := x2[i] ifb[i] = 1 unless x2[i] already appears in y from x1. Aftercrossover, any such conflicting entries are repaired, assign-ing them randomly from the set of remaining (unassigned)labels.
This evolutionary labeling approach is specified in Al-gorithm 1. In particular we use a population size of 20, acrossover fraction of 80%, a tournament size of 4, and typi-cally achieve an optimal labeling in under 10 iterations.
Note that the labeling objective is free to differ from thesegmentation objective. The labeling objective may describepart adjacencies and similarities, while the segmentation ob-jective describes the desired final configuration of parts.
7 Segmentation optimization
Having addressed the matters of center initialization and la-bel assignment, we now focus on segmentation optimization.If wish to obtain a segmentation consisting of n segments, itcan be parameterized by a real vector x of dimensionalitym = 4n of the form
x = (x1,y1,z1,w1,x2,y2,z2,w2, . . . ,xn,yn,zn,wn)
Algorithm 1 Evolutionary optimal objective labeling1: // Initialize population P2: for i = 1 to populationsize do3: P[i]← random permutation of the n labels4: loop5: // Evaluate fitness6: for i = 1 to populationsize do7: F[i] ← aggregate obj. function value with assign-
ment P[i]8: Remember best fitness and individual so far9: i← 1
10: // Generate crossover individuals11: while i≤ crossoverfraction∗populationsize do12: x1← tournamentselection(P,F)13: x2← tournamentselection(P,F)14: P′[i ++]← uniformcrossover(x1,x2) // w/repair15: // Generate mutation individuals16: while i≤ populationsize do17: x← tournamentselection(P,F)18: P′[i ++]← mutate(x)19: P← P′20: return individual with best fitness observed
where (xi,yi,zi) are the 3D coordinates of the i-th Voronoicenter and wi is its associated weight. The task is now tosearch for a value of x that minimizes the aggregate objectivefunction when evaluated on the segmentation induced by x.
Gradient-descent approaches are not suitable given thediscrete nature of the surface representation: a center mustbe altered sufficiently to induce a change in the classificationof at least one surface element. We instead choose general-ized pattern search, which is a derivative-free, direct searchmethod [Tor97, AJ03].
Given a pattern size ∆, at each iteration the method eval-uates the aggregate objective function at all 2m neighborsformed by adding and subtracting ∆ to each coordinate ofthe current x. If any such neighbor produces a lower objec-tive value, the iteration is considered successful, x is updatedand ∆ is multiplied by an expansion factor. Otherwise, theiteration is considered unsuccessful, no update of x occurs,and ∆ is multiplied by a contraction factor. The algorithmterminates when ∆ falls below a given threshold. In particu-lar, we use an initial ∆ of .2d where d is the shape’s boundingbox diagonal, an expansion factor of 1.2, a contraction fac-tor of .5 and a ∆ threshold of 10−4d. We typically observeconvergence in fewer than 50 optimization iterations.
Symmetry constraints: Recent methods allow for therobust automatic detection of symmetries in 3D shape[KFR04, TW05, SKS06, MGP06, PSG∗06] and, wheneverpossible, shape processing algorithms should leverage thisredundancy. An advantageous property of our frameworkfor parameterizing mesh segmentations is that it is easy toapply symmetry constraints to optimization parameters. Forinstance, if one segment is known to be symmetric to an-other, then the latter’s Voronoi center position and weightcan be generated by symmetry from the first. If a segment is
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.

P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
Symmetry Convexity Integrated
Figure 5: Our approach can easily be used to segment bymultiple objectives hierarchically.
known to lie on a plane of global symmetry, then its Voronoicenter can be constrained to lie on the plane. The advantagesof exploiting this known redundancy are two-fold: first, ifa shape is known to have a certain global symmetry, thenthe segmentation is assured to have the same symmetry byconstruction. Second, the dimensionality of the optimizationdomain is reduced by removing parameters which can effec-tively be generated from others. The user need only provide aconstraint function which takes in the non-redundant param-eters and produces the others from known symmetry. Fig. 4illustrates this in our results on bird models by constrainingone wing to be symmetric to the other and the body and tailto lie on the plane of global symmetry.
Hierarchical segmentation: Our approach can easily beused to segment by multiple objectives hierarchically. Fig. 5illustrates a case where we first segment to maximize planarsymmetry of parts, then by convex components, and then in-tegrate the result. In Sec. 8 we will also describe how our ap-proach can be used to obtain hierarchical bounding volumesfor path tracing acceleration (Fig. 8) as well as a seman-tically meaningful hierarchical segmentation of humanoidcharacters (Fig. 9).
8 Applications
Our framework and the following applications were imple-mented in Matlab. Labeling plus optimization time is ~3min. per segmentation on average, but of course this willdepend on mesh density, the objective functions used, andthe efficiency of their implementation. All experiments wererun on a Pentium M 2.13Ghz processor with 2Gb RAM.
Semantically meaningful segmentations
Fig. 1, 3, 4, 6, 7, and 9 show examples of semantically mean-ingful segmentations and associated labelings obtained us-ing our method. The decompositions are determined by user-specified objectives which encode a description of the partsof the model and their interrelations (see table in Fig. 13).We now define the objective function terms used to describethese segmentations.
Liu and Zhang – Spectral Embedding
Kraevoy and Sheffer – Convexity
Simari and Singh – Ellipsoidal primitives
Multi-objective – Labeled and optimized
Figure 6: Result of applying our approach (bottom row) tobird models compared to the approaches of Liu and Zhang[LZ07], Kraevoy and Sheffer [KS06] and Simari and Singh[SS05]. Note how our approach achieves semantic consis-tency across shapes. See Sec. 8 and Fig. 13 for objectivedetails.
Given a segmented surface, let P be the segment asso-ciated with a given label. Define P.scalei, i ∈ [1,3] as thepart’s scales resulting from PCA, i.e. as the square root of theeigenvalues of the surface’s 3× 3 covariance matrix, sortedin descending magnitude. We define the following unary ob-jectives named according to their corresponding adjective:
narrow(P) :=.5(P.scale2 + P.scale3)
P.scale1
flat(P) := .5(
P.scale3
P.scale1+
P.scale3
P.scale2
)compact(P) := 1−narrow(P)
Let us further define P.c as part P’s centroid and P.axisi,i ∈ [1,3] as the part P’s i-th normalized eigenvector also re-sulting from PCA. We may then define the objectives
planarsymmetric(P) := mini
surfdist(P, reflect(P,P.c,P.axisi))
ellipsoidal(p) := surfdist(P,covarellipsoid(P))
We define surfdist(S1,S2) as the sum of area-weightedsquared distance of points from S1 to S2 normalized by thetotal area of S1 and by its bounding box diagonal length.In turn reflect(S, p,~n) represents the planar reflection of sur-face S about the plane determined by point p and normal~n. This is similar to the symmetry metric used by Simariet al. [SKS06] but is non-iterative. Naturally, we define thecovarellipsoid(P) as the covariance ellipsoid of part P deter-mined by its centroid, and PCA scales and axes.
Let us also define the following n-ary objectives that refer
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.

P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
Liu and Zhang – Spectral Embedding
Kraevoy and Sheffer – Convexity
Simari and Singh – Ellipsoidal primitives
Multi-objective – Labeled and optimized
Figure 7: Comparison of our approach to the result of ap-plying Liu and Zhang [LZ07], Kraevoy and Sheffer [KS06]and Simari and Singh [SS05]. Note that in our results thehead, body and legs are consistently segmented and labeledacross models. Leg labels are considered interchangeable.See Sec. 8 and Fig. 13 for objective details.
to label interrelations. Specifically
perpendicular(P1,P2) := |P1.axis1 ·P2.axis1|
similarsize(P1,P2, . . . ,Pk) :=1d ∑
i||Pi.scale− s||
where d is the global surface’s bounding box diagonal,Pi.scale refers to the part’s entire 3× 1 scale vector ands = 1
k ∑i Pi.scale.
Finally we define the global objective
convexparts(Seg) :=
(1V
∣∣∣∣∣(
∑P∈Seg
H(P)
)−V
∣∣∣∣∣) 1
3
where Seg refers to the segmentation, H(P) is part P’s con-vex hull volume and V is the volume enclosed by the totaloriginal surface.
Fig. 13 describes the specific objectives and constraints(where applicable) used in each of the results of Fig. 1, 3, 4,6 7 and 9. The first four were automatically labeled using theoptimal unary approach while the last two were done usingthe evolutionary approach. Objective weights were found ex-perimentally by trial and error, though there was not need of
Figure 8: Comparison of average number of triangle inter-sections per pixel computed (on log10 scale) as a functionof axis-aligned bounding box hierarchy depth. Curves cor-respond to octree (red) and our method’s results when op-timizing volume tightness (green) and a combined objectiveof volume tightness and uniform partitioning (blue).
much refinement. Note that they do not change per model,but rather are kept fixed for all models in a class.
Bounding volume hierarchies for path tracing
Bounding volume hierarchies are often used to acceleratepath tracing. A common way to obtain such hierarchies isthrough the use of an octree which at each level divides thespace into axis-aligned octants through the object’s centroid.
We use our segmentation approach to obtain axis-alignedbounding box hierarchies by segmenting a model using anobjective which optimizes bounding volume tightness:
bbox1(Seg) := ∑P∈Seg
AABB(P)
where AABB(P) is P’s axis-aligned bounding box volume.
Alternatively, our method allows us to optimize boundingvolume tightness simultaneously with distribution of faces:
bbox2(Seg) :=
(1
H(P) ∑P∈Seg
AABB(P)
) 13
+ cv({|P| : P ∈ Seg})
where H(P) is P’s convex hull volume and cv is the coef-ficient of variation defined as the ratio of the standard devi-ation to the mean of a set. This term favors segmentationswhere all segments have a similar number of faces.
Fig. 8 shows a comparison of the bounding boxes ob-tained with octree partitioning and those obtained by ourmethod using either objective on three scenes. In each case,we show an order of magnitude improvement in triangle in-tersection tests per pixel rendered, with the combined objec-tive function showing further improvement over the singleobjective. Note that in this application labeling is unneces-sary since the objectives are homogenous to all parts.
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.
P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
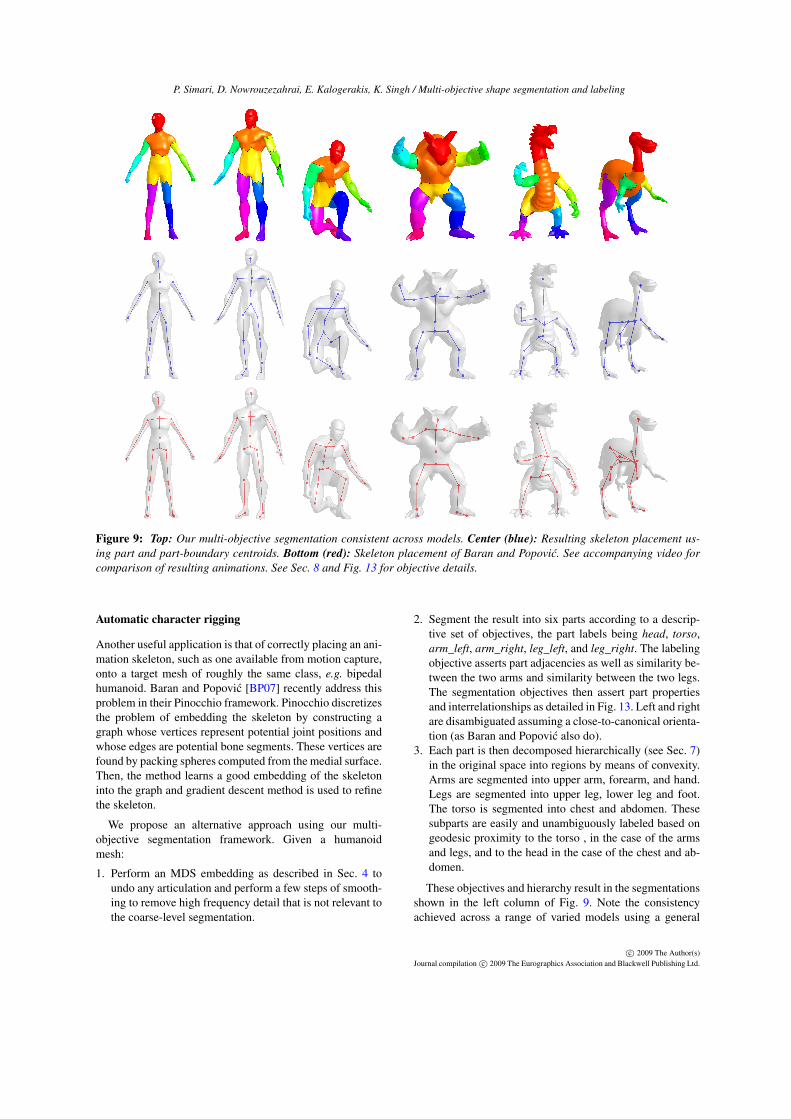
Figure 9: Top: Our multi-objective segmentation consistent across models. Center (blue): Resulting skeleton placement us-ing part and part-boundary centroids. Bottom (red): Skeleton placement of Baran and Popovic. See accompanying video forcomparison of resulting animations. See Sec. 8 and Fig. 13 for objective details.
Automatic character rigging
Another useful application is that of correctly placing an ani-mation skeleton, such as one available from motion capture,onto a target mesh of roughly the same class, e.g. bipedalhumanoid. Baran and Popovic [BP07] recently address thisproblem in their Pinocchio framework. Pinocchio discretizesthe problem of embedding the skeleton by constructing agraph whose vertices represent potential joint positions andwhose edges are potential bone segments. These vertices arefound by packing spheres computed from the medial surface.Then, the method learns a good embedding of the skeletoninto the graph and gradient descent method is used to refinethe skeleton.
We propose an alternative approach using our multi-objective segmentation framework. Given a humanoidmesh:
1. Perform an MDS embedding as described in Sec. 4 toundo any articulation and perform a few steps of smooth-ing to remove high frequency detail that is not relevant tothe coarse-level segmentation.
2. Segment the result into six parts according to a descrip-tive set of objectives, the part labels being head, torso,arm_left, arm_right, leg_left, and leg_right. The labelingobjective asserts part adjacencies as well as similarity be-tween the two arms and similarity between the two legs.The segmentation objectives then assert part propertiesand interrelationships as detailed in Fig. 13. Left and rightare disambiguated assuming a close-to-canonical orienta-tion (as Baran and Popovic also do).
3. Each part is then decomposed hierarchically (see Sec. 7)in the original space into regions by means of convexity.Arms are segmented into upper arm, forearm, and hand.Legs are segmented into upper leg, lower leg and foot.The torso is segmented into chest and abdomen. Thesesubparts are easily and unambiguously labeled based ongeodesic proximity to the torso , in the case of the armsand legs, and to the head in the case of the chest and ab-domen.
These objectives and hierarchy result in the segmentationsshown in the left column of Fig. 9. Note the consistencyachieved across a range of varied models using a general
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.

P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
Figure 10: Left: A character with deformers associated to its clothing. Right: Clothing scaled and transferred automaticallyonto the semantically correspondent places.
set of objectives which describe what we know about hu-manoids and the animation skeleton.
The animation skeleton can now be easily placed accord-ing to this segmentation. The joints corresponding to thehead, chest, abdomen, hands and feet are placed at the cor-responding part centroid. Joints corresponding to shoulders,elbows, hips, knees, ankles, and mid-body are placed at thecentroid of the corresponding part boundaries. The secondrow of Fig. 9 shows in blue the skeleton placement that re-sults form our segmentations.
For comparison, the third row of Fig. 9 shows in red theskeleton placement produced by Pinocchio. Comparison ofresulting animations can be seen in the accompanying video.Our approach results in similar placements for well posedcharacters, such as the first two. However, our approachneeded no training since it directly received the user knowl-edge in the form of the segmentation objectives. Moreover,as can be observed, our approach much better handles char-acters under articulation as well as those with large vari-ations in part proportions and locations such as the dinomodel. On the other hand, our approach will naturally failwhen expected parts are not present, whereas Pinocchio canstill produce a result in these situations. We thus see the twoapproaches as complementary.
Automatic character dressing
Another compelling application of the semantically-labeledhumanoid characters above is the ability to automaticallyclothe such characters. Clothes and accessories parametri-
cally defined on a segmented and labeled mannequin can beeasily transferred to dress a new character.
Accessories such as the hat and shoes (see Fig. 10) are de-fined with respect to parts such as the head and feet on themannequin. Dressing a given semantically-segmented char-acter with a desired accessory requires transforming it to thecorrespondingly labeled part. We define this as the affinetransform that maps the oriented bounding box (OBB) ofthe mannequin’s part to the OBB of the corresponding parton the given character.
Clothing such as the shirt and shorts (Fig. 10) and acces-sories that drape across parts are first coarsely deformed tofit the new character and then relaxed by simulation to drapenaturally. We automatically fit spline curves to the bound-aries of the parts that the item of clothing drapes over. Thesecorresponding curves (left of Fig. 10) on the mannequinand target character define a wire deformation [SF98], thatcoarsely reshapes the clothing around the new character. Toensure that the entire item of clothing is deformed, the radiusof influence of the wire curves is set conservatively large to1.5 times the largest bounding box dimension of its adjacentparts on the mannequin. Finally, a cloth simulation drapesthe coarsely fitted clothing over the target character.
The results on three characters, female, armadillo andmuscleman, are illustrated at the right of Fig. 10. As canbe seen, in the case of the armadillo the transfer only workswell for the shoes and not the shirt and hat, understandably,because of the oddly shaped torso and protruding ears. Thecoarse fitting of the shorts cause the tail to protrude resultingin the shorts relaxing over the body with a protruding tail.
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.

P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
Figure 11: Our spatial parametrization can easily handlepolygon-soup models by ignoring mesh connectivity. Herewe segment such a model into convex parts. Closeups shownon-manifold regions with interpenetrating faces and smalldisconnected components. Such a model could not be han-dled by current methods that require manifold geometry.
9 Limitations and future work
We recognize that there are classes of objects which ourparametrization might have difficulty with and its limitationswith respect to complex boundaries (Fig. 12). Our approachcaptures simple boundaries and more complex boundariescould be addressed in a refinement pass using min-cuts oractive contours, for example.
We can perhaps look at this parametrization with the anal-ogy of spatial volume-based vs. surface-based deformationtechniques. Both have pros and cons and have been the sub-ject of ongoing research for over 25 years. This is the firstvolume-based segmentation parametrization approach and islikely to stimulate further research in this direction. It alsoshares pros and cons analogous to those of volume-based de-formations. It is simple and compact (a vector of 4k scalars,where k is the number of segments) and decouples the seg-mentation search from the surface resolution-dependent ob-jective function evaluation (most objectives we use are O(n),where n is the number of surface elements).
Our approach is surface representation-agnostic, workswith non-manifold or disconnected objects (Fig. 11), can ad-dress non-zero genus shapes (Fig. 12), and we show it towork well on examples typical to segmentation literature. Aswith the many extensions on the original box-shaped FFDswe expect work subsequent to this paper to be able to capturericher volume shapes with more complex boundaries.
We show our results on what could be considered a rel-atively low number of parts. However, in many real-worldapplications this is more than sufficient, especially (as weshow) when the method is applied hierarchically. We presentpractical results across several such applications and showthem to compare favorably to state-of-the-art methods.
Manual intervention, allowing for user placement of ini-tial segmentation parameters, can be added to our systemwith no conceptual difficulty. In our work, user input canhelp with both the segmentation and labeling. Our goal,however, is to be able to consistently label and segment notone, but entire classes of objects, and our approach is thefirst to automate this process based on multiple heteroge-neous black-box objectives.
Figure 12: Left: Our spatial parametrization can segmentshapes of non-zero genus. Right: Our approach capturessimple boundaries. More complex boundaries could be ad-dressed in a refinement pass using, e.g. min-cuts or activecontours. Both models are segmented for convex parts.
The formulation of the objective functions is not an au-tomated process. However, a single weighted combinationof simple objectives, once defined, can suffice to segmentand label an entire class of objects, as illustrated by Fig.6, 7, and 9. While the objective functions we provide haveintuitive meaning and are easy to reuse, we acknowledgethat the choosing of these objectives and the fine tuning oftheir weights can be made more user friendly, or perhapsbe learned using statistical methods from a set of human-segmented models [CGF09]. We hope to address this in thefuture.
Acknowledgements: We would like to thank Richard (Hao)Zhang, Frank (Rong) Liu, Alla Sheffer and VladislavKraevoy for providing us with the segmentation results oftheir methods. Also, thank you to Ilya Baran and JovanPopovic for providing their Pinocchio library for automaticcharacter rigging. Meshes were obtained from the PrincetonShape Benchmark, Aim@Shape Project, and 3D Cafe. Re-search supported by MITACS.
References
[AFS06] ATTENE M., FALCIDIENO B., SPAGNUOLO M.: Hier-archical mesh segmentation based on fitting primitives. VisualComputer 22, 3 (2006), 181–193.
[AJ03] AUDET C., JR. J. E. D.: Analysis of generalized patternsearches. SIAM Journal on Optimization 13, 3 (2003), 889–903.
[AKM∗06] ATTENE M., KATZ S., MORTARA M., PATANE G.,SPAGNUOLO M., TAL A.: Mesh segmentation - a comparativestudy. IEEE Shape Modeling International (2006).
[BP07] BARAN I., POPOVIC J.: Automatic rigging and animationof 3d characters. ACM SIGGRAPH (2007).
[CDST97] CHAZELLE B., DOBKIN D. P., SHOURABOURA N.,TAL A.: Strategies for polyhedral surface decomposition: an ex-perimental study. Computational Geometry: Theory and Appli-cations. 7, 5-6 (1997), 327–342.
[CGF09] CHEN X., GOLOVINSKIY A., , FUNKHOUSER T.:A benchmark for 3D mesh segmentation. ACM SIGGRAPH(2009).
[CSAD04] COHEN-STEINER D., ALLIEZ P., DESBRUN M.:Variational shape approximation. In ACM SIGGRAPH (2004).
[dGV08] DE GOES F., GOLDENSTEIN S., VELHO L.: A hierar-chical segmentation of articulated bodies. Eurographics Sympo-sium on Geomtetry Processing (2008).
[GF08] GOLOVINSKIY A., FUNKHOUSER T.: Randomized cutsfor 3D mesh analysis. ACM SIGGRAPH Asia (2008).
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.

P. Simari, D. Nowrouzezahrai, E. Kalogerakis, K. Singh / Multi-objective shape segmentation and labeling
Summary of objectives usednarrow(·), flat(·), planarsymmetric(·), ellipsoidal(·), perpendicular(·, ·), similarsize(·, ·), convexparts(·)
Model Labels Segmentation objectivesHammer handle,head 5∗narrow(handle), perpendicular(handle,head), convexparts(Seg)Quadruped head, body, leg1, . . . , leg4 ∀inarrow(legi), similarsize(leg1, . . . , leg4), compact(head), 10∗convexparts(Seg)
In dogs, compactness of head is emphasized with 8∗compact(head)Bird body, wing1, wing2, tail narrow(body), ∀iflat(wingi), similarsize(wing1,wing2), flat(tail), . . .
compact(tail), 10∗convexparts(Seg)Constraints: body and tail lie on plane of global symmetry and parameters for wing2are reflected from wing1.
Octopus head,arm1, . . . ,arm8 ellipsoidal(head), ∀inarrow(armi), similarsize(arm1, . . . ,arm8), 10∗convexparts(Seg)Humanoid head, torso,arm_left narrow(arm_left), narrow(arm_right), narrow(leg_left), narrow(leg_right),. . .
arm_right, leg_left, leg_right compact(head), similarsize(arm1,arm2), similarsize(leg1, leg2), 10∗convexparts(Seg)Subparts (upper arm, forearm, hand, etc.) are obtained hierarchically using convexity.
Figure 13: Objectives used to obtain segmentations of each model.
[HWAG09] HUANG Q., WICKE M., ADAMS B., GUIBAS L.:Shape decomposition using modal analysis. Eurographics(2009).
[JKS05] JULIUS D., KRAEVOY V., SHEFFER A.: D-charts:Quasi-developable mesh segmentation. Eurographics (2005).
[KFR04] KAZHDAN M., FUNKHOUSER T., RUSINKIEWICZ S.:Symmetry descriptors and 3d shape matching. In EurographicsSymposium on Geomtetry Processing (2004).
[KJS07] KREAVOY V., JULIUS D., SHEFFER A.: Model com-position from interchangeable components. Pacific Graphics(2007).
[KLT05] KATZ S., LEIFMAN G., TAL A.: Mesh segmentationusing feature point and core extraction. The Visual Computer 21,8-10 (2005), 649–658.
[KS06] KRAEVOY V., SHEFFER A.: Variational, meaningfulshape decomposition. ACM SIGGRAPH Sketches (2006).
[KT03] KATZ S., TAL A.: Hierarchical mesh decomposition us-ing fuzzy clustering and cuts. ACM SIGGRAPH (2003).
[Kuh55] KUHN H. W.: The hungarian method for the assignmentproblem. Naval Research Logistics Quarterly 2, 1-2 (1955), 83–97.
[LA05] LIEN J.-M., AMATO N. M.: Approximate convex de-composition of polyhedra. ACM Symposium on Solid and Physi-cal Modeling (2005).
[LMLR06] LIU S., MARTIN R. R., LANGBEIN F. C., ROSINP. L.: Segmenting reliefs on triangle meshes. ACM Symposiumon Solid and Physical Modeling (2006).
[LMLR07] LIU S., MARTIN R. R., LANGBEIN F. C., ROSINP. L.: Segmenting geometric reliefs from textured backgroundsurfaces. Computer-Aided Design and Applications 4, 5 (2007).
[LMM98] LUKÁCS G., MARTIN R., MARSHALL D.: Faithfulleast-squares fitting of spheres, cylinders, cones and tori for reli-able segmentation. ECCV (1998).
[LZ07] LIU R., ZHANG H.: Mesh segmentation via spectral em-bedding and contour analysis. Eurographics (2007).
[LZSCO09] LIU R. F., ZHANG H., SHAMIR A., COHEN-OR D.:A part-aware surface metric for shape analysis. Eurographics(2009).
[MGP06] MITRA N. J., GUIBAS L. J., PAULY M.: Partial andapproximate symmetry detection for 3d geometry. ACM SIG-GRAPH (2006).
[Mic98] MICHALEWICZ Z.: Genetic Algorithms + Data Struc-tures = Evolution Programs, 3 ed. Springer, 1998.
[MPS∗04] MORTARA M., PATANÈ G., SPAGNUOLO M., FALCI-DIENO B., ROSSIGNAC J.: Plumber: a method for a multi-scaledecomposition of 3d shapes into tubular primitives and bodies.ACM Symposium on Solid Modeling and Applications (2004).
[Mun57] MUNKRES J.: Algorithms for the assignment and trans-portation problems. Journal of the Society of Industrial and Ap-plied Mathematics 5, 1 (1957), 32–38.
[MW99] MANGAN A. P., WHITAKER R. T.: Partitioning 3d sur-face meshes using watershed segmentation. IEEE Transactionson Visualization and Computer Graphics 5, 4 (1999), 308–321.
[OBSC00] OKABE A., BOOTS B., SUGIHARA K., CHIU S. N.:Spatial Tessellations: Concepts and Applications of Voronoi Di-agrams, 2 ed. Wiley, 2000.
[PSG∗06] PODOLAK J., SHILANE P., GOLOVINSKIY A.,RUSINKIEWICZ S., FUNKHOUSER T.: A planar-reflective sym-metry transform for 3d shapes. ACM SIGGRAPH (2006).
[Ric08] RICHARDSON T.: The Art Student’s Guide to the Propor-tions of the Human Form. Tom Richardson, 2008.
[SF98] SINGH K., FIUME E.: Wires: a geometric deformationtechnique. In ACM SIGGRAPH (1998).
[Sha08] SHAMIR A.: A survey on mesh segmentation techniques.Computer Graphics Forum 27, 6 (2008), 1539–1556.
[SKS06] SIMARI P., KALOGERAKIS V., SINGH K.: Fold-ing meshes: Hierarchical mesh segmentation based on planarsymmetry. Eurographics Symposium on Geomtetry Processing(2006).
[SS05] SIMARI P., SINGH K.: Extraction and remeshing of el-lipsoidal representations from mesh data. Graphics Interface(2005).
[SSSCO08] SHALOM S., SHAPIRA L., SHAMIR A., COHEN-ORD.: Part analogies in sets of objects. Eurographics Workshop on3D Object Retrieval (2008).
[Tor97] TORCZON V.: On the convergence of pattern search al-gorithms. SIAM Journal on Optimization 7, 1 (1997), 1–25.
[TW05] THRUN S., WEGBREIT B.: Shape from symmetry. ICCV(2005).
[ZTS02] ZUCKERBERGER E., TAL A., SHLAFMAN S.: Poly-hedral surface decomposition with applications. Computers andGraphics 26, 5 (2002), 733–743.
c© 2009 The Author(s)Journal compilation c© 2009 The Eurographics Association and Blackwell Publishing Ltd.